digital image processing -...
TRANSCRIPT

Digital Image Processing
IMAGE FILTERING AND RESTORATION
Hamid R. Rabiee
Fall 2015
In the Name of Allah, the Most Compassionate, the Most Merciful

Example 22
From Matlab ImageToolbox
Documentation pp12-4

Imperfectness in Image Capturing
Blurring ~ linear spatial-invariant filter model w/ additive noise
Impulse response h(n1, n2) & H(1, 2)
Point Spread Function (PSF) ~ positive I/O
[No blur] h(n1, n2) = (n1, n2)
[Linear translational motion blur]
local average along motion direction
[Uniform out-of-focus blur]
local average in a circular neighborhood
Atomspheric turbulence blur, etc.
23
H
u(n1, n2 ) v(n1, n2 )
N(n1, n2 )
otherwise 0
tan and
x if L
1
),;,( yx
222
Ly
Lyxh
otherwise 0
x if R
1
);,(
222
2Ry
Ryxh
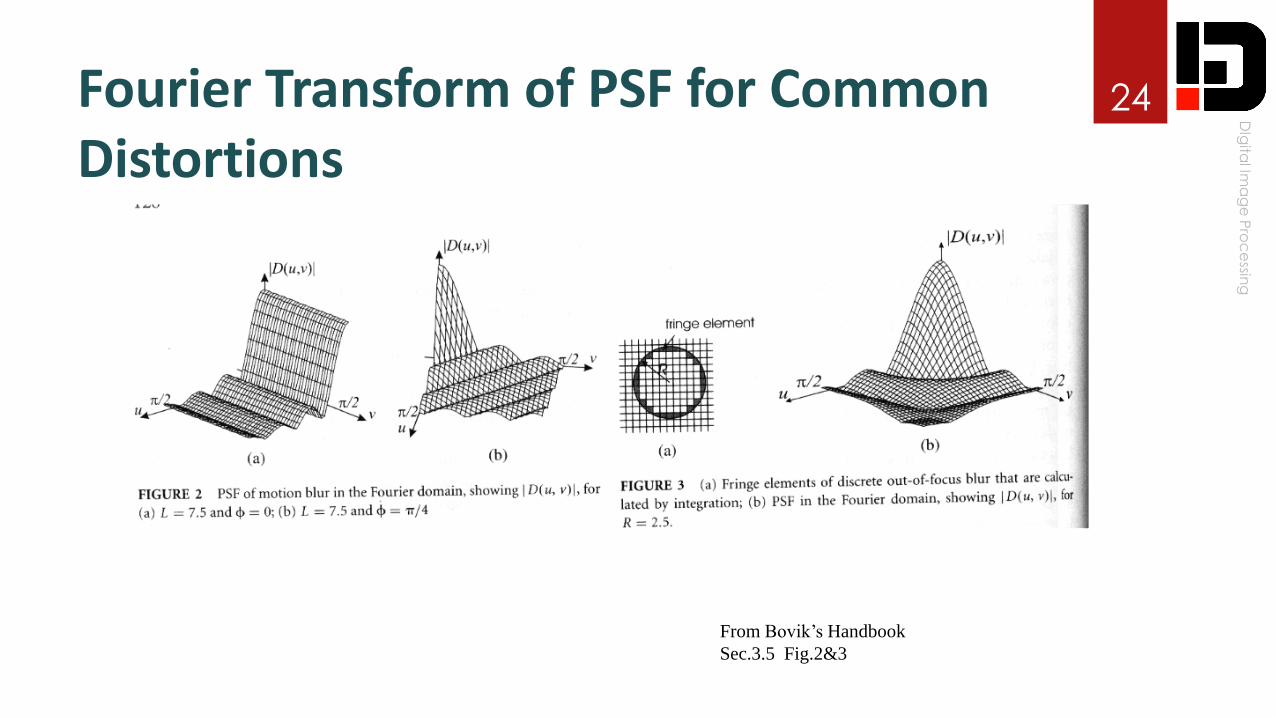
Fourier Transform of PSF for Common Distortions
24
From Bovik’s Handbook
Sec.3.5 Fig.2&3

Undo Linear Spatial-Invariant Distortion
Assume noiseless and PSF of distortion h(n1, n2) is known
Restoration by Deconvolution / Inverse-Filtering Often used for deblurring
Want to find g(n1, n2) satisfies h(n1, n2) g(n1, n2) = (n1, n2)
h(k1, k2) g(n1 -k1, n2-k2) = (n1, n2) for all n1, n2
Easy to solve in spectrum domain
Convolution Multiplication
H(1, 2) G(1, 2) = 1
Interpretation: choose G to compensate distortions from H
25
H
u(n1, n2) v(n1, n2)
(n1, n2)=0
G
u’(n1, n2)w(n1, n2)
),(
1),(
21
21
H
G

Problems With Inverse Filtering Under Noise
Zeros in H(1, 2) Interpretation: distortion by H removes all info. in those freq. Inverse filter tries to “compensate” by assigning infinite gains
Amplifies noise:W(1, 2) = H (1, 2) U (1, 2) U’ (1, 2) = (W+N) / H N/H if W=0
Solutions?
26
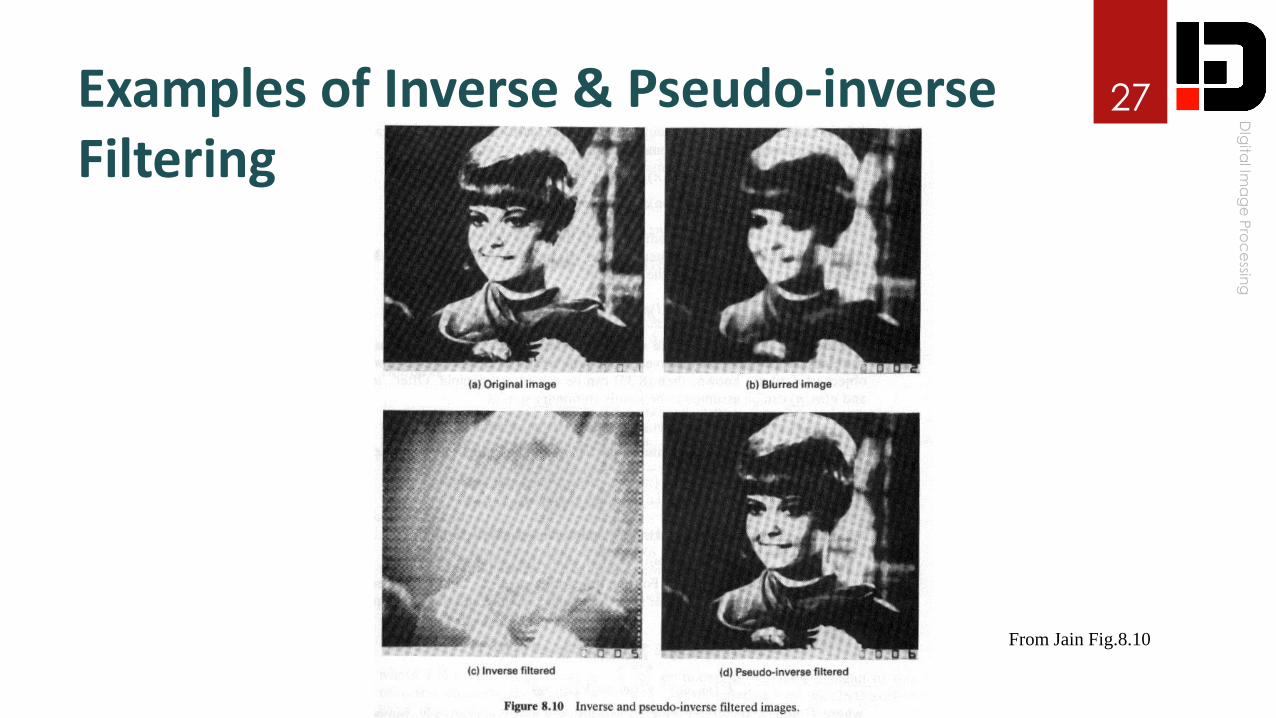
Examples of Inverse & Pseudo-inverse Filtering
27
From Jain Fig.8.10
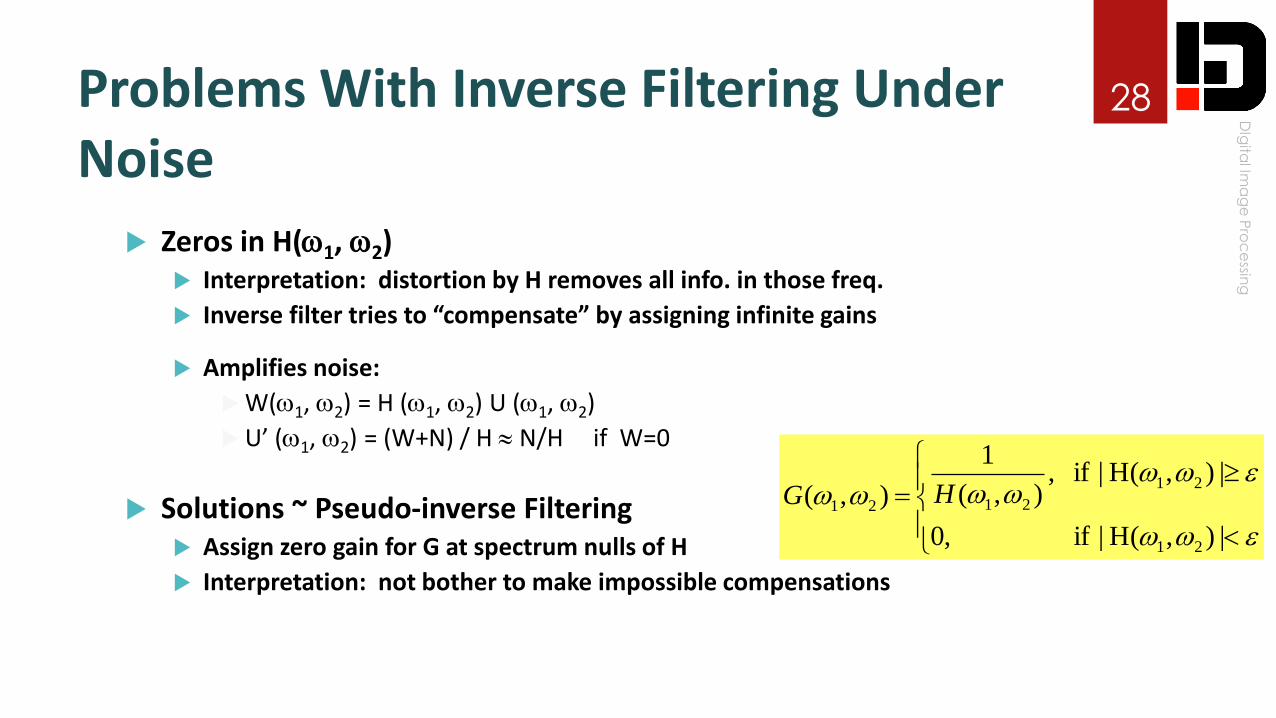
Problems With Inverse Filtering Under Noise
Zeros in H(1, 2) Interpretation: distortion by H removes all info. in those freq.
Inverse filter tries to “compensate” by assigning infinite gains
Amplifies noise:
W(1, 2) = H (1, 2) U (1, 2)
U’ (1, 2) = (W+N) / H N/H if W=0
Solutions ~ Pseudo-inverse Filtering Assign zero gain for G at spectrum nulls of H
Interpretation: not bother to make impossible compensations
28
|),(H| if ,0
|),(H| if ,),(
1
),(
21
21
2121HG
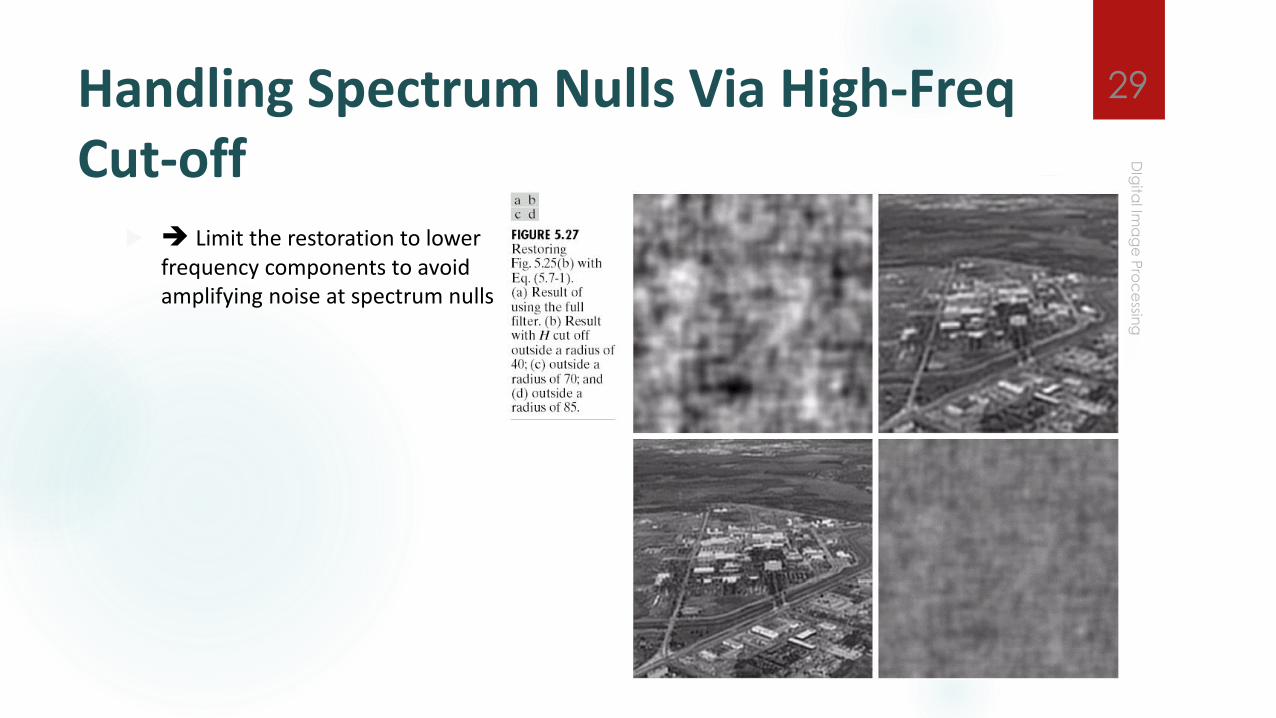
Handling Spectrum Nulls Via High-FreqCut-off
Limit the restoration to lower frequency components to avoid amplifying noise at spectrum nulls
29
Problems With Inverse Filtering Under Noise
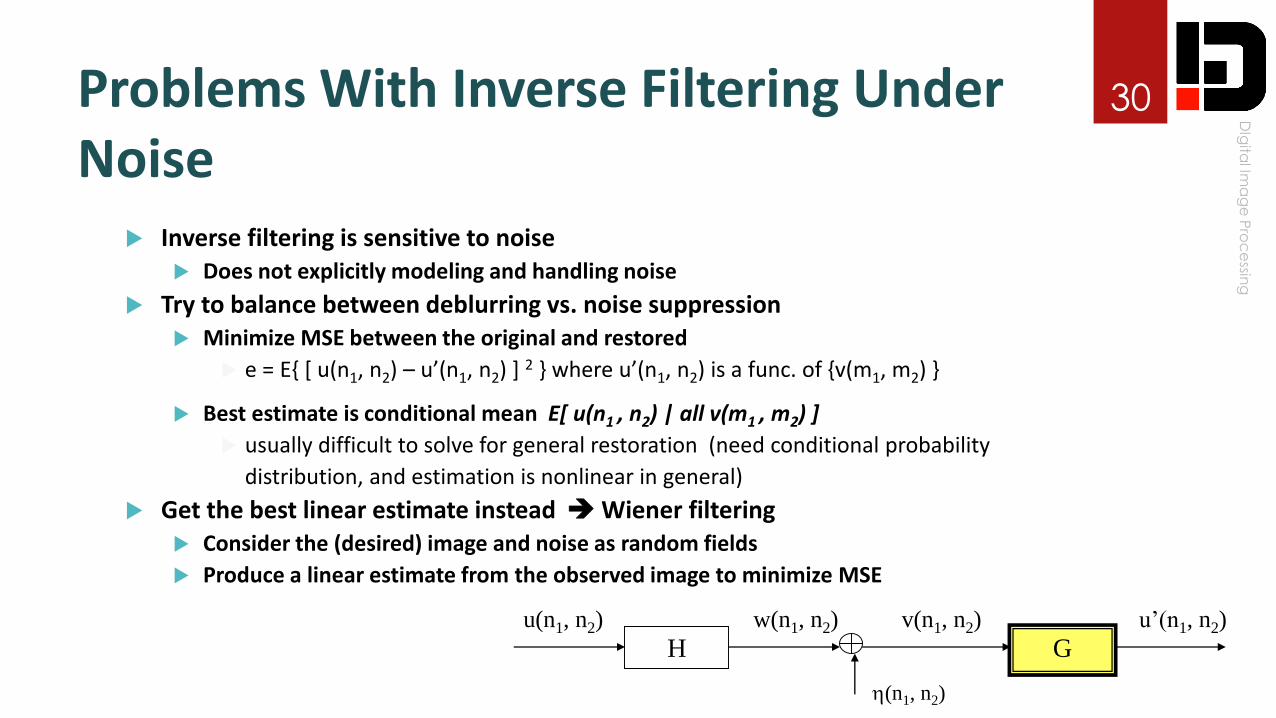
Inverse filtering is sensitive to noise Does not explicitly modeling and handling noise
Try to balance between deblurring vs. noise suppression Minimize MSE between the original and restored
e = E{ [ u(n1, n2) – u’(n1, n2) ] 2 } where u’(n1, n2) is a func. of {v(m1, m2) }
Best estimate is conditional mean E[ u(n1 , n2) | all v(m1 , m2) ]
usually difficult to solve for general restoration (need conditional probability
distribution, and estimation is nonlinear in general)
Get the best linear estimate instead Wiener filtering Consider the (desired) image and noise as random fields
Produce a linear estimate from the observed image to minimize MSE
30
Hu(n1, n2) v(n1, n2)
(n1, n2)
Gu’(n1, n2)w(n1, n2)

Wiener Filtering
Get the best linear estimate minimizing MSE Assume spatial-invariant filter u’(n1, n2) = g (n1, n2) v(n1, n2) Assume wide-sense stationarity for original signal and noise Assume noise is zero-mean and uncorrelated with original signal
Solutions Bring into orthogonal condition
E{ [ u(n1, n2) – u’(n1, n2) ] v(m1, m2) }=0 Represent in correlation functions: Ruv(k,l) = g(k,l) Rvv(k,l) Take DFT to get representation in power spectrum density
31
),(
),(),(
21
2121
vv
uv
S
SG
),(),(),(
),(),(),(),( :Note
2121
*
21
2121
2
2121
uuuv
uuvv
SHS
SSHS
),(),(),(
),(),(
2121
2
21
2121
*
SSH
SH
uu
uu

More on Wiener Filtering
Balancing between two jobs for deblurring noisy image
HPF filter for de-blurring(undo H distortion)
LPF for suppressing noise
Noiseless case ~ S = 0 (inverse filter)
Wiener filter becomes pseudo-inverse filter for S 0
No-blur case ~ H = 1 (Wiener Smoothing Filter)
Zero-phase filter to attenuate noise according to SNR at each freq.
32
0|),(H| if ,0
0|),(H| if ,),(
1
/||),(
21
21
2102
*
021
HSSH
HG S
uv
S
1),(
),(
),(),(
),(),(
21
21
2121
211wiener21
SNR
SNR
uu
uuH
S
S
SS
SG
uuSH
SH
G
*
wiener21
1),(

Comparisons 33
From Jain Fig.8.11
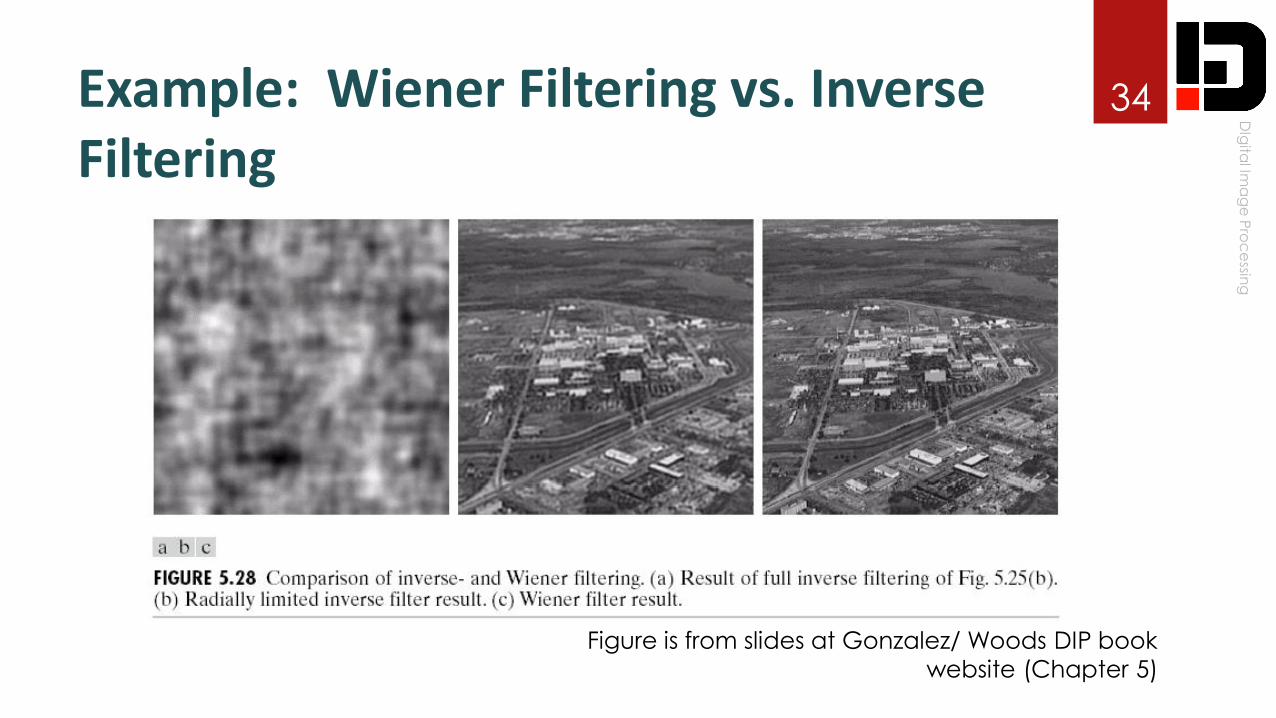
Example: Wiener Filtering vs. Inverse Filtering
34
Figure is from slides at Gonzalez/ Woods DIP book
website (Chapter 5)
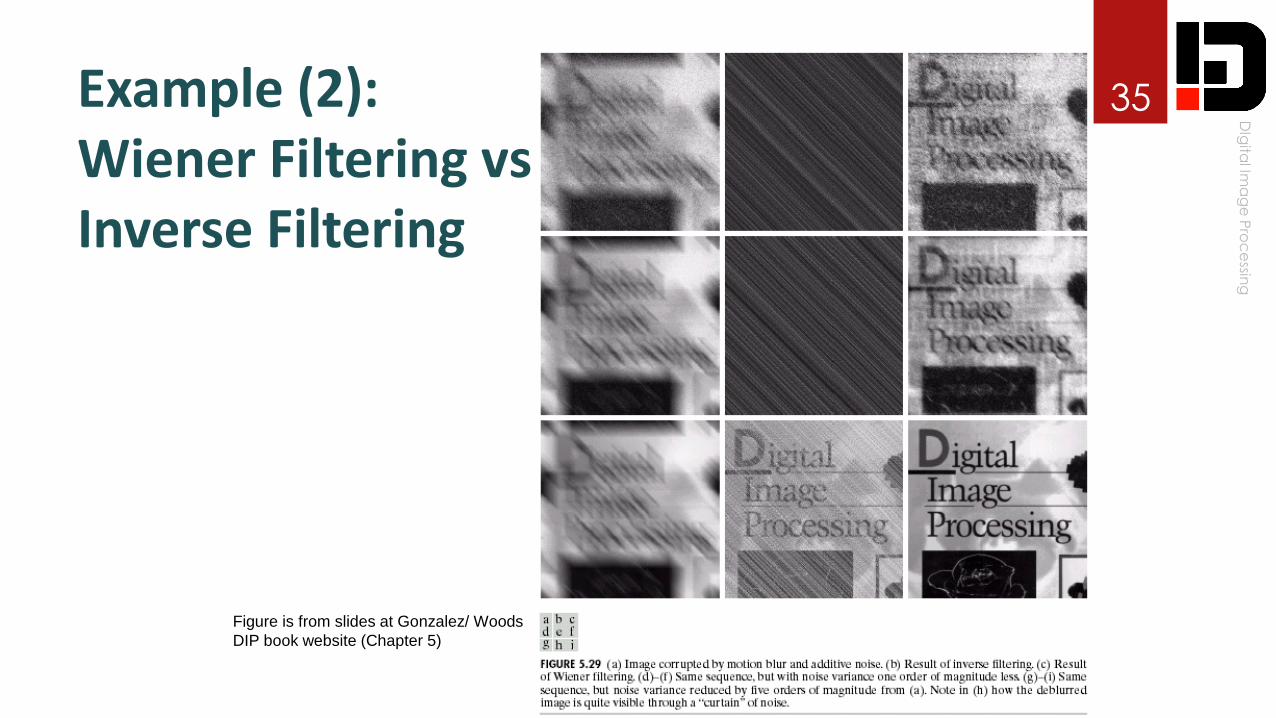
Example (2):Wiener Filtering vs. Inverse Filtering
35
Figure is from slides at Gonzalez/ Woods
DIP book website (Chapter 5)
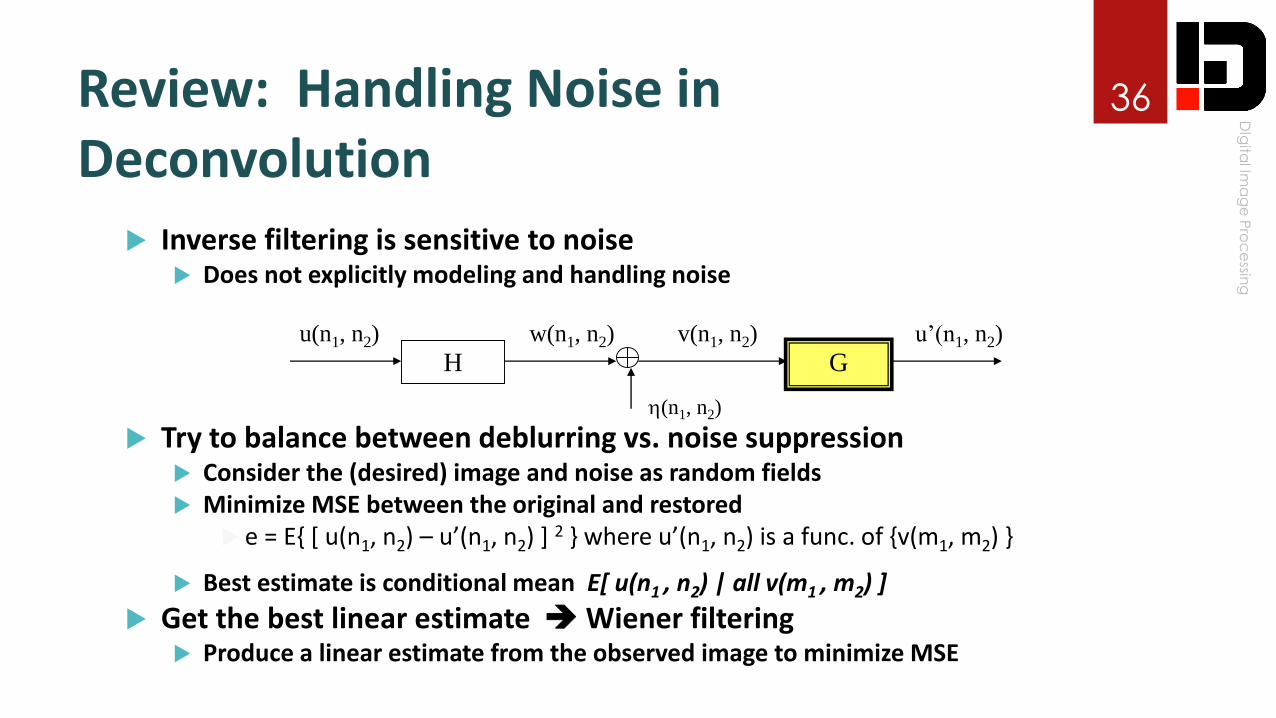
Review: Handling Noise in Deconvolution
Inverse filtering is sensitive to noise Does not explicitly modeling and handling noise
Try to balance between deblurring vs. noise suppression Consider the (desired) image and noise as random fields Minimize MSE between the original and restored
e = E{ [ u(n1, n2) – u’(n1, n2) ] 2 } where u’(n1, n2) is a func. of {v(m1, m2) }
Best estimate is conditional mean E[ u(n1 , n2) | all v(m1 , m2) ]
Get the best linear estimate Wiener filtering Produce a linear estimate from the observed image to minimize MSE
36
Hu(n1, n2) v(n1, n2)
(n1, n2)
Gu’(n1, n2)w(n1, n2)
Wiener Filter: From Theory to Practice
Recall: assumed p.s.d. of image & noise random fields and freq. response of distortion filter are known
Why make the assumptions?
Are these reasonable assumptions?
What do they imply in our implementation of Wiener filter?
37
Wiener Filter: Issues to be Addressed
Wiener filter’s size
Theoretically has infinite impulse response ~ require large-size DFTs
Impose filter size constraint: find the best FIR that minimizes MSE
Need to estimate power spectrum density of orig. signal
Estimate p.s.d. of blurred image v and compensate variance due to noise
Estimate p.s.d. from a set of representative images similar to the images to be restored
Or use statistical model for the orig. image and estimate parameters
Constrained least square filter ~ see Jain’s Sec.8.8 & Gonzalez Sec.5.9
Optimize smoothness in restored image (least-square of the rough transitions)
Constrain differences between blurred image and blurred version of reconstructed image
Estimate the restoration filter w/o the need of estimating p.s.d.
Unknown distortion H ~ Blind Deconvolution
38

Basic Ideas of Blind Deconvolution
Three ways to estimate H: observation, experimentation, math. modeling
Estimate H via spectrum’s zero patterns
Two major classes of blur (motion blur and out-of-focus)
H has nulls related to the type and the parameters of the blur
Maximum-Likelihood blur estimation
Each set of image model and blur parameters gives a “typical” blurred output; Probability
comes into picture because of the existence of noise
Given the observation of blurred image, try to find the set of parameters that is most likely to
produce that blurred output
Iteration ~ Expectation-Maximization approach (EM)
Given estimated parameters, restore image via Wiener filtering
Examine restored image and refine parameter estimation
Get local optimums
To explore more: Bovik’s Handbook Sec.3.5 (subsection-4, pp136)
“Blind Image Deconvolution” by Kundur et al, IEEE Sig. Proc. Magazine, vol.13, 1996
39
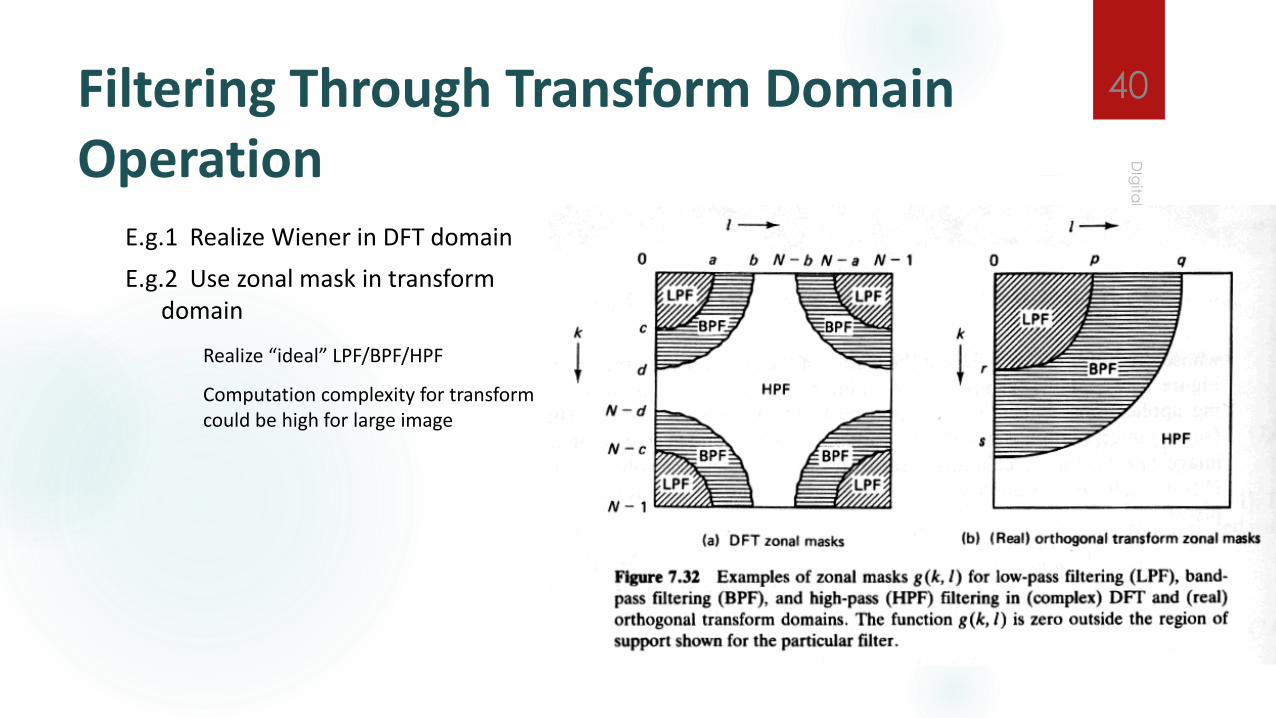
Filtering Through Transform Domain Operation
E.g.1 Realize Wiener in DFT domain
E.g.2 Use zonal mask in transform domain
Realize “ideal” LPF/BPF/HPF
Computation complexity for transform could be high for large image
40
End of Lecture
Thank You!Slides adapted from ENEE631, by Min Wu