detection evolution with multi- order contextual co-occurrence guang chen (missouri) yuanyuan ding...
TRANSCRIPT
Detection Evolution with Multi-Order Contextual Co-Occurrence
Guang Chen (Missouri)Yuanyuan Ding (Epson)
Jing Xiao (Epson)Tony Han (Missouri)

2
Object Detection
• Sliding Window Based Approach– Classifiers and features are
typically inside the window.
• Context Helps– Context outside the sliding window
can be used to achieve better performances.

3
Context in Computer Vision
• High Level Context– Semantic Context– Geometric Context
• Low Level Context– Pixel Context– Shape Context
• Murphy et al, 2003• Hoiem et al, 2006• Avidan, 2006• Shotton et al, 2006• Rabinovich et al, 2007• Oliva & Torralba, 2007• Heitz & Koller, 2008• Desai et al, 2009• Divvala et al, 2009• Li, Socher & Fei-Fei, 2009• Marszalek et al, 2009• Bao & Savarese, 2010• Yao & Fei-Fei, 2010• Tu & Bai, 2010• Li, Parikh & Chen, 2011• Wolf & Bileschi, 2006• Belongie et al, 2000
[Rabinovich et al, 2007][Yao & Fei-Fei, 2010] [Hoiem et al, 2006]
4
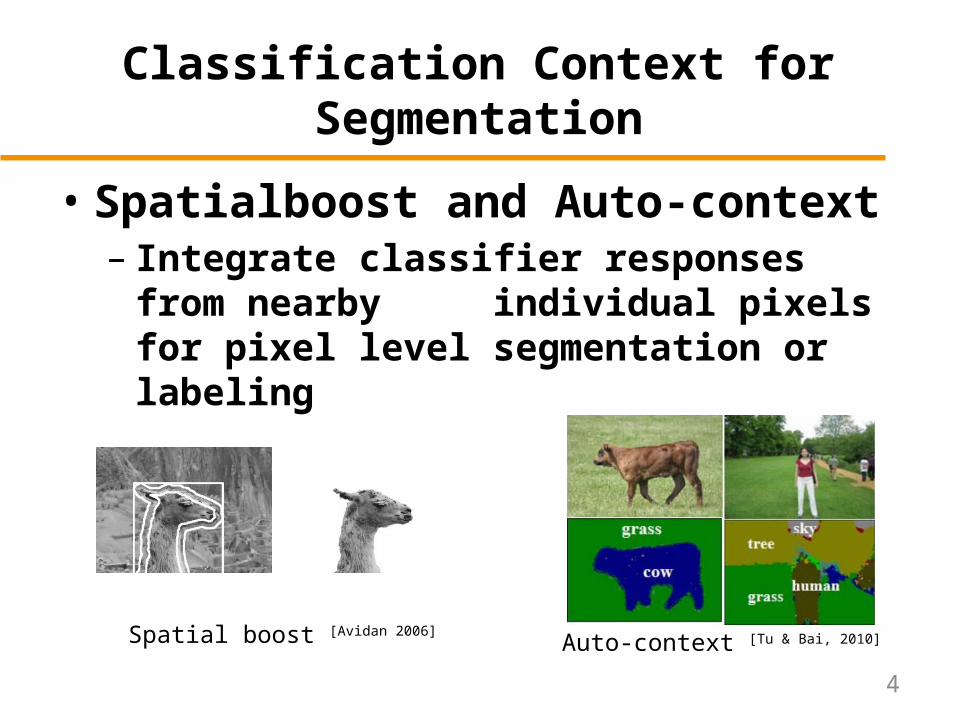
Classification Context for Segmentation
• Spatialboost and Auto-context– Integrate classifier responses from
nearby individual pixels for pixel level segmentation or labeling
Spatial boost [Avidan 2006]Auto-context [Tu & Bai, 2010]

5
Classification Context for Object Detection
• Contextual Boost [Ding & Xiao, 2012]
–Directly uses the detector responses
Adaboost Classification
Based on Image Context
Image Context + Adaboost
Image Context
Multi-scale HOG-LDP for Each Scan
Window
Classification Context
Responses at Scale & Spatial Neighborhood
Adaboost Classification
Based on Augmented
Context
Contextual Boost

6
Co-Occurrence Context
• Can we further exploit co-occurrence information given only detectors for a single object type?

7
Co-Occurrence Context
• Co-Occurrence from Detector Response Map.

8
Our Contribution
• An Effective and Efficient Multi-Order Co-Occurrence Context Representation Using a Single Object Detector.
9
Our Contribution
• An Effective and Efficient Multi-Order Co-Occurrence Context Representation Using a Single Object Detector.
• Multi-Order Contextual Co-Occurrence (MOCO)– 0th order: Classification Context– 1st order: Randomized Binary
Comparison– High order: Co-Occurrence Descriptor

10
Constructing MOCO
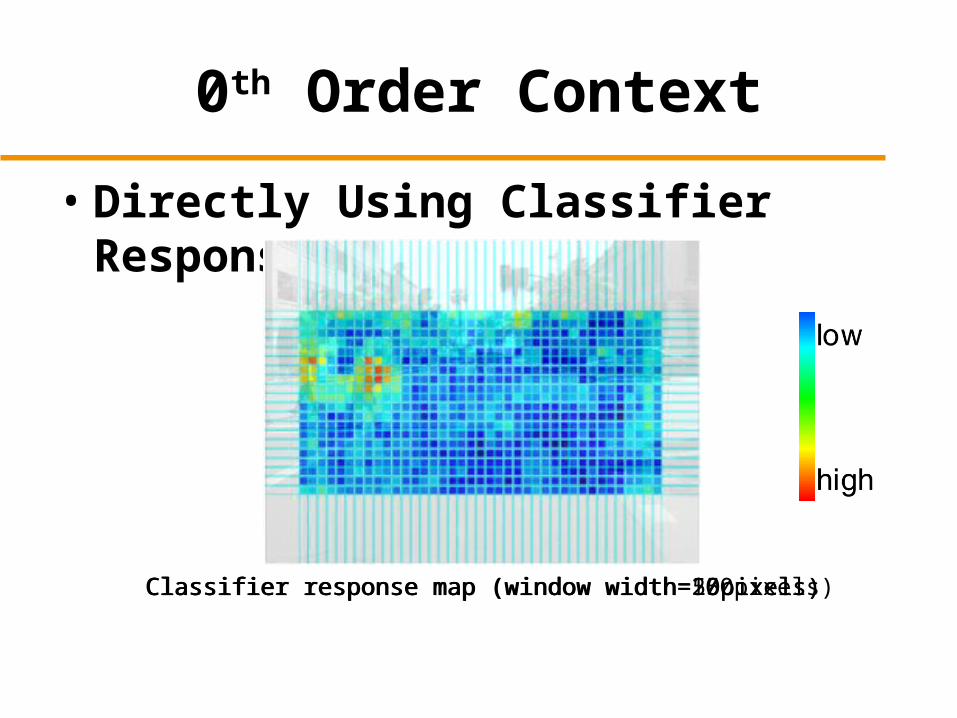
0th Order Context
• Directly Using Classifier Responses
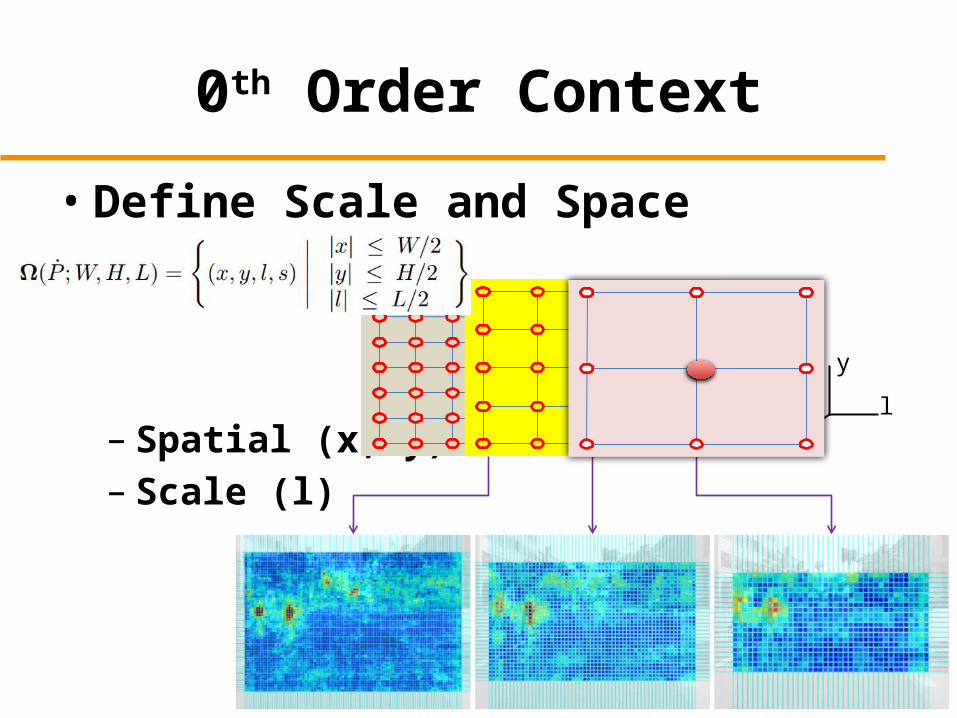
Classifier response map (window width=25pixels)Classifier response map (window width=50pixels)Classifier response map (window width=100pixels)
12
0th Order Context
• Define Scale and Space Neighborhood
– Spatial (x, y)– Scale (l)
y
xl
P
13
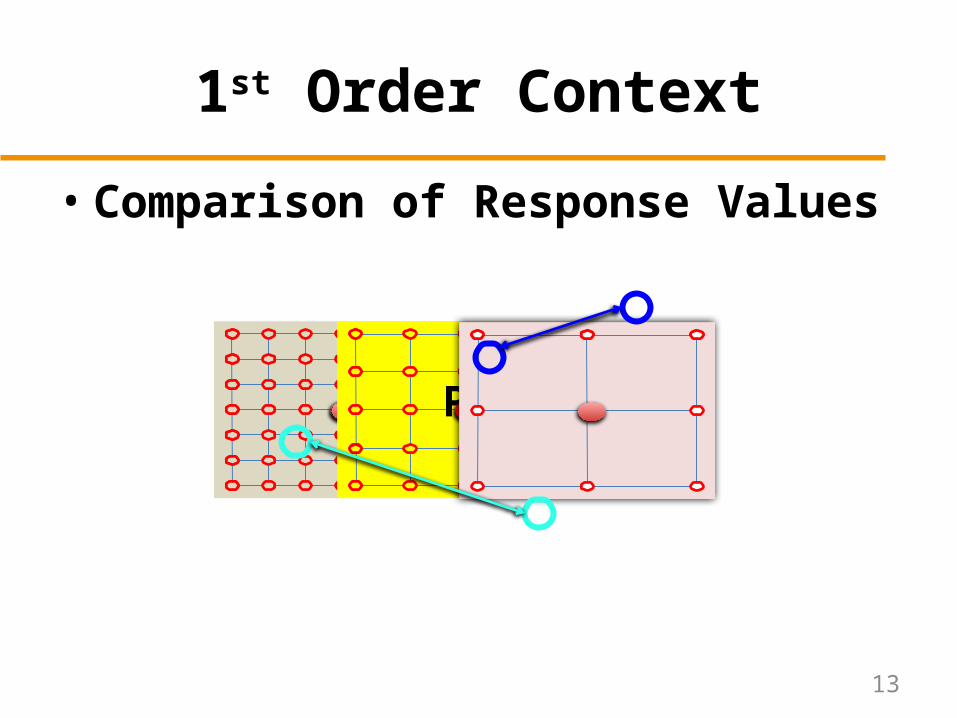
1st Order Context
• Comparison of Response Values
P

14
1st Order Context
• Randomized Arrangement

15
High Order Context
• 1. Closeness Vector• 2. Histogram
16
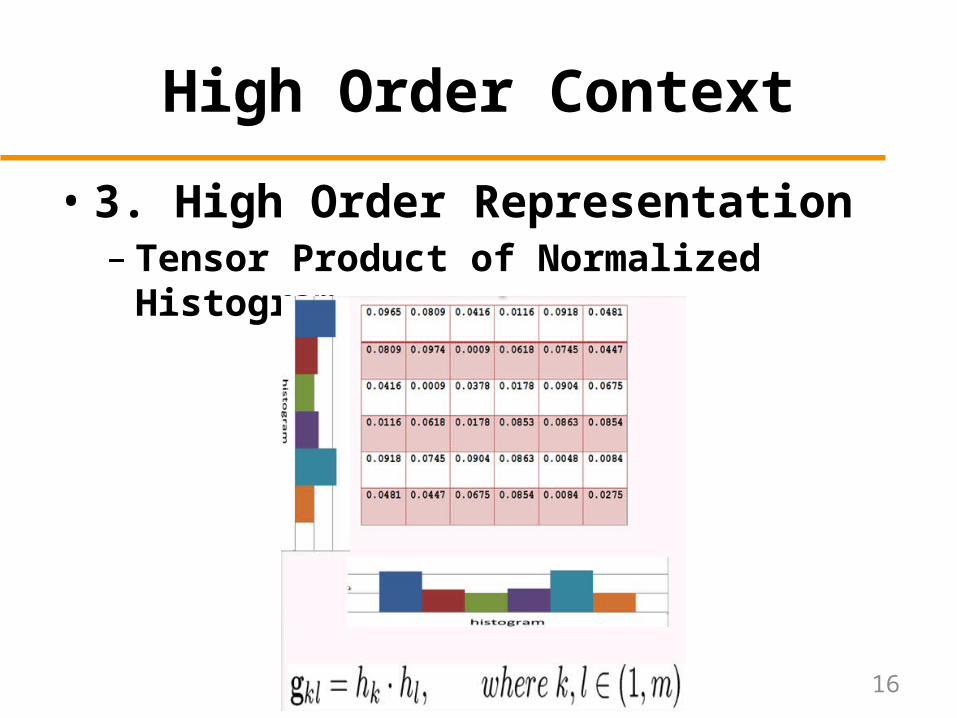
High Order Context
• 3. High Order Representation– Tensor Product of Normalized
Histogram
17
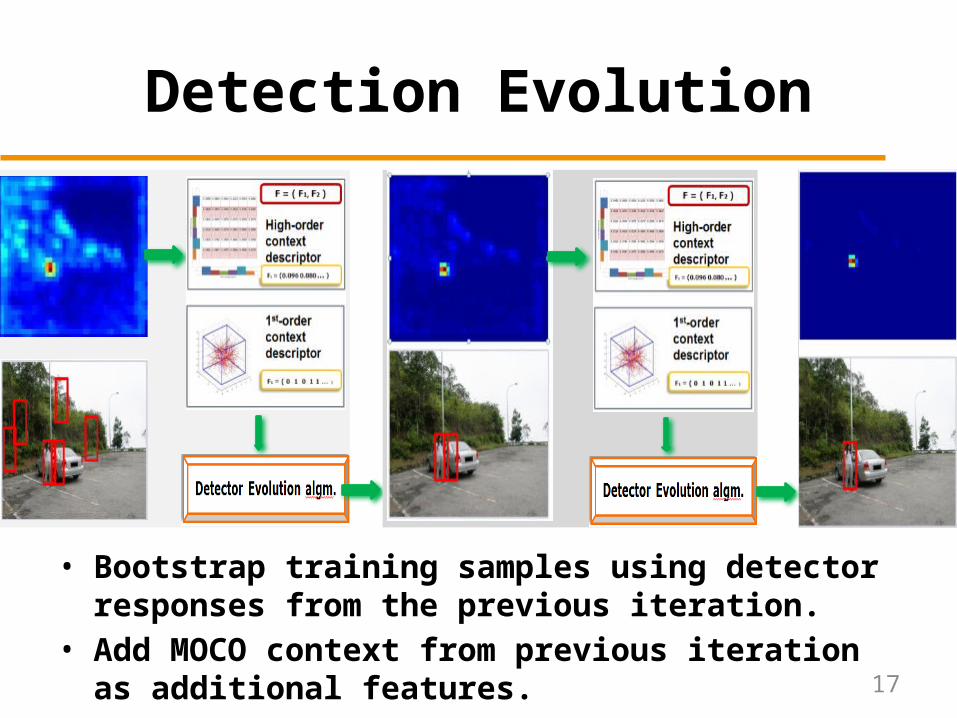
Detection Evolution
• Bootstrap training samples using detector responses from the previous iteration.
• Add MOCO context from previous iteration as additional features.
18
Baseline Detector
• Any Object Detection Algorithm Can be Used as Baseline Detector.
19
Baseline Detector
• Any Object Detection Algorithm Can be Used as Baseline Detector.
• Deformable-Parts-Model [Felzenszwalb et al,
2010]
– Inner Context: Parts Models Encodes Relationship between Parts.
–Outer Context: MOCO deals with Co-Occurrence among Scanning Windows
20
Experiments
• Datasets– PASCAL VOC 2007, 20 Object
Categories– Caltech Pedestrian
• Deformable-Parts-Model–Default setting ( 3 components,
each with 1 root and 8 part filters)

21
Experiment – 1st Order
• 1st Order & Context Neighbor Size

22
Experiment – 1st Order
• Pairwise Comparison: Arrangements

23
Experiment – High Order
• High Order Context
–Dimension

24
Experiment – Combinations
• Combinations
• Iterations

25
Comparison on Caltech Dataset

26
Comparison on PASCAL’07
• Mean AP on 20 Categories
27
Conclusion
• An Efficient Context Representation –Only Relying on Detectors for a
Single Object Type– Combining Deformable Parts Model
to Model both inner and Outer Context around Detection Window
• Future Work– Exploit Context With Detectors of
Multiple Object Types?
28
Questions?
Thanks for your attention!