detecting mean reverted patterns in statistical arbitrage
TRANSCRIPT

Detecting Mean Reverted Patterns in Statistical Arbitrage
Kostas TriantafyllopoulosUniversity of Sheffield
OutlineI Motivation / algorithmic pairs trading
I Model set-upI Detection of local mean-reversion
I Adaptive estimationI 1. RLS with gradient variable forgetting factorI 2. RLS with Gauss-Newton variable forgetting factorI 3. RLS with beta-Bernoulli forgetting factor
I Trading strategy
I Pepsi and Coca Cola example
Introduction
I Statistical arbitrage.
I Algorithmic pairs trading market neutral trading.Buy low, sell high.
I Two assets with prices pAt and pBtI At t: if pAt < pBt , buy low (A) and sell high (B).I At t + 1: if pAt > pBt , buy low (B) and sell high (A)...
I In the long run, mean reversion of spread yt = pAt − pBt .If yt goes up, yt will go down at t + 1.Take advantage of relative mispricings of A and B.

Introduction
Share price stream
Time
Shar
e pric
e A,B
1 2 3 4 5
68
1012
1416
Spread stream
Time
A−B
1 2 3 4 5
−20
24
68
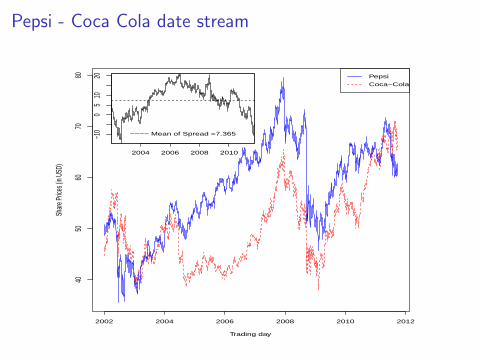
Pepsi - Coca Cola date stream
Trading day
Shar
e Pric
es (in
USD
)
2002 2004 2006 2008 2010 2012
4050
6070
80 Pepsi
Coca−Cola
2004 2006 2008 2010
−10
05
1020
−−−− Mean of Spread =7.365

Model set-up
(Elliott et al, 2005). yt is a noisy version of a mean-revertedprocess.
yt = xt + εt
xt = α+ βxt−1 + ζt
(Triantafyllopoulos and Montana, 2011).
yt = αt + βtyt−1 + ϵt = FTt θt + ϵt ,
θt = Φθt−1 + ωt ,
Ft =
[1
yt−1
]and θt =
[αt
βt
]
Detecting mean reversion
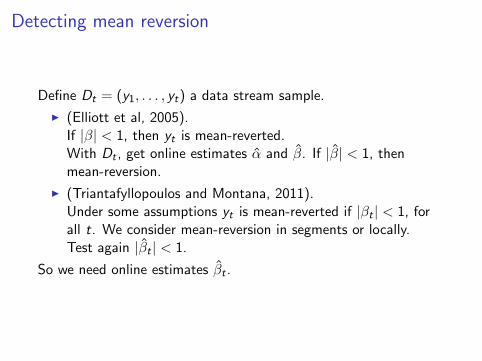
Define Dt = (y1, . . . , yt) a data stream sample.
I (Elliott et al, 2005).If |β| < 1, then yt is mean-reverted.With Dt , get online estimates α and β. If |β| < 1, thenmean-reversion.
I (Triantafyllopoulos and Montana, 2011).Under some assumptions yt is mean-reverted if |βt | < 1, forall t. We consider mean-reversion in segments or locally.Test again |βt | < 1.
So we need online estimates βt .

Recursive least squares (RLS)
(Haykin, 2001).Recursive Least Squares (RLS), if Φ = I .Find θ that minimizes the cost function
t−1∑j=0
λj(yt−j − FTt−jθ)
2
0 < λ < 1 a forgetting factor. Past data are “forgotten” at a rate
t−1∑j=0
λj = 1 + λ+ · · ·+ λt−1 → 1
1− λ
[memory of the system]
I With λ = 1, ordinary regression, memory is ∞I With λ < 1, RLS, memory (1− λ)−1.

SS-RLS (state-space RLS)
Variable forgetting factor (Haykin, 2001, Malik, 2006).
λt − λt−1 = c(t)
Steepest descent:
λt = [λt−1 + a∇λ(t)]λ+
λ−,
1. ∇λ(t) ≈ −etFTt Φψt−1
2. ψt = ∂mt/∂λ = (I − KtFTt )Φψt−1 + StFtet
3.
St = ∂Pt/∂λ = −λ−1t Pt + λ−1
t KtKTt
+λ−1t (I − KtF
Tt )ΦSt−1Φ
T (I − FtKTt ).
Need starting values m1,P1, ψ1,S1, λ1.

GN-RLS (Gauss-Newton RLS)Song et al (2000) gave an approximate GN algorithm.
λt =
[λt−1 + a
∇λ(t)
∇2λ(t)
]λ+
λ−
,
Here ∇2λ(t) ≈ (FT
t Φψt−1)2 − etF
Tt Φηt
ηt = ∂ψt−1/∂λ = (I − KtFTt )Φηt−1 + LtFtet − 2StFtF
Tt Φψt−1
where
Lt = λ−1t (I − KtF
Tt )ΦLt−1Φ
T (I − FtKTt )
+λ−2t Pt(I − FtK
Tt )− λ−1
t St +Mt +MTt
−λ−2t (I − KtF
Tt )ΦSt−1Φ
T (I − FtKTt )
and
Mt = λ−1t StFtF
Tt {Pt − ΦSt−1Φ
T (I − FtKTt )}.

GN-RLS cont.
I GN-RLS creates too abrupt jumps in λt / too sensitive tochanges.
I When smooth signal, we want SS-RLS and when noisy wewant GN-RLS.
I We use
λt =
[λt−1 + a∇λ(t)]λ+λ− , if e2t ≤ k[
λt−1 + a∇λ(t)∇2
λ(t)
]λ+λ−, if e2t > k

BB-RLS (beta Bernoulli RLS)
In the above we ask λ− ≤ λt ≤ λ+.
I If e2t small, λt → λ+ (smoothness)
I If e2t large, λt → λ− (adaptiveness)
We setλt = πλ+ + (1− π)λ−, π = Pr(e2t ≤ kt)
Two events small prediction error / large prediction error
xt =
{1, if e2t ≤ kt , with probability π0, if e2t > kt , with probability 1− π

Observation model xt ∼ Bernoulli(π).Prior for π is beta, π ∼ B(c1, c2)
p(xt | π) = πxt (1− xt)1−xt (bernoulli model)
p(π) ∝ πc1−1(1− π)c2−1 (prior beta model)
p(π | xt) ∝ p(xt | π)p(π) ∝ πc1+xt−1(1− π)c2+1−xt−1
So π|xt ∼ B(c1 + xt , c2 − xt + 1).Sequentially: π | x1, . . . , xt ≡ π | Dt−1 ∼ Be(c1t , c2t), wherec1t = c1,t−1 + xt and c2t = c2,t−1 − xt + 1.
πt = E (π | Dt−1) = c1t(c1t + c2t)−1
λt = E (λt |Dt−1) = πtλ+ + (1− πt)λ−
From Pr(e2t ≤ kt) = π, we have kt = qtF−1χ2 (π).
We use kt ≈ qtF−1χ2 (πt−1).

Key points of λt
I λt is stochastic.
I We can derive its distribution
p(λt |Dt−1) = c(λt − λ−)c1t−1(λ+ − λt)
c2t−1
I We can evaluate the mode and the variance of λt .
I We can showλt ≈ xλ+ + (1− x)λ−
I If for many points e2t < kt , followed by few large e2t > kt ,then locally λt does not work well.

Solution: intervention
Example.
1. Set λ− = 0.8, λ+ = 0.99
2. e2t ≤ kt (t = 1, . . . , 95)
3. e2t > kt (t = 96, 97, 98, 99, 100)
4. λt = 0.9805 (closer to λ+ = 0.99, than to λ− = 0.8).
If change in xt (from 0 to 1 or from 1 to 0), reset the priors c1,t−1
and c2,t−1 to the initial values (c1,1 = c2,1 = 0.5).
πt =c1t
c1t + c2t=
c1,1 + xtc1,1 + c2,1 + 1
=1 + 2xt
4
λt =
{0.75λ+ + 0.25λ−, if xt = 10.25λ+ + 0.75λ−, if xt = 0
In the example, λ96 = 0.25× 0.99 + 0.75× 0.8 = 0.847.

Simulated streams
Time
Simula
ted S
pread
300 320 340 360 380 400 420 440
05
10
Prediction of |Bt|
Trading day
300 320 340 360 380 400 420 440
0.20.4
0.60.8
1.0
SS−RLS
GN−RLS
BB−RLS

Trading strategy
Spread yt = pA,t − pB,t .
I If yt not mean-reverted do nothing. It is not predictable.
I If yt < yt+1, pA,t+1 > pA,t or pB,t+1 < pB,t . Buy A / sell B.
I If yt > yt+1, pA,t+1 < pA,t or pB,t+1 > pB,t . Buy B / sell A.
I If yt ≈ yt−1, do nothing.
At time t, we don’t know yt+1, so we predict it and use yt+1.

Trading strategy
−50
5
Trading strategysp
read
y
p(A) > p(B)
p(A) < p(B)
t−1
t
t+1
Tradable time
Non−tradable time

With observed spread yt at t:
I Close the position of t − 1 (if opened).
I If |βt+1| < 0.99, declare yt+1 as mean-reverted.
I If yt+1 − h > yt , buy A / short-sell B.
I If yt+1 + h < yt , buy B / short-sell A.
Example:
I At t: yt = 10 and we project yt+1 = 11.
I yt+1 can be 12 or 9 (rules change if we apply yt <> yt+1.
I yt+1 = 9 can give loss, if we adopt yt < yt+1 rule (10 < 11).
I Take h = 10% of yt+1 = 1.1, and yt+1 − h = 9.9 < 10 = yt ,we do not open a position buy A and short sell B.
I As yt+1 + h = 11.1 > 10 = yt , we do not open a positionshort sell A and buy B.

Pepsi - Coca Cola date stream
Trading day
Shar
e Pric
es (in
USD
)
2002 2004 2006 2008 2010 2012
4050
6070
80 Pepsi
Coca−Cola
2004 2006 2008 2010
−10
05
1020
−−−− Mean of Spread =7.365

Detection of mean reverted patterns
0.98
00.
990
1.00
01.
010
SS
−RLS
0.98
00.
990
1.00
01.
010
GN
−RLS
0.98
00.
990
1.00
01.
010
2002 2004 2006 2008 2010 2012
BB
−RLS
Trading day
Prediction of |Bt|
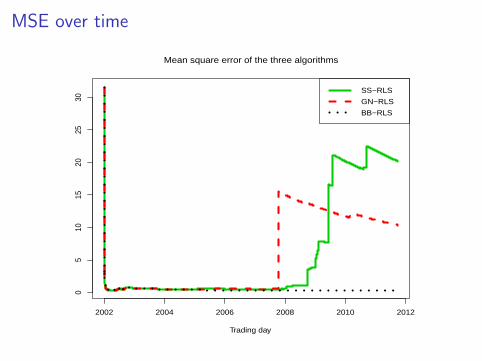
MSE over time
Mean square error of the three algorithms
Trading day
2002 2004 2006 2008 2010 2012
05
1015
2025
30
SS−RLS
GN−RLS
BB−RLS
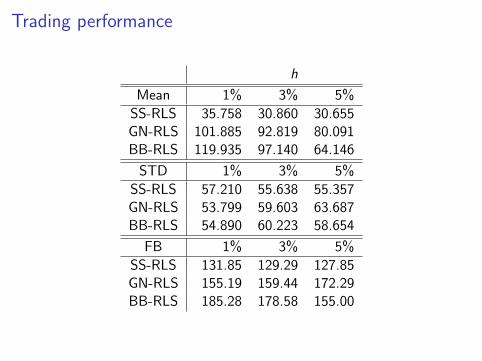
Trading performance
h
Mean 1% 3% 5%
SS-RLS 35.758 30.860 30.655GN-RLS 101.885 92.819 80.091BB-RLS 119.935 97.140 64.146
STD 1% 3% 5%
SS-RLS 57.210 55.638 55.357GN-RLS 53.799 59.603 63.687BB-RLS 54.890 60.223 58.654
FB 1% 3% 5%
SS-RLS 131.85 129.29 127.85GN-RLS 155.19 159.44 172.29BB-RLS 185.28 178.58 155.00
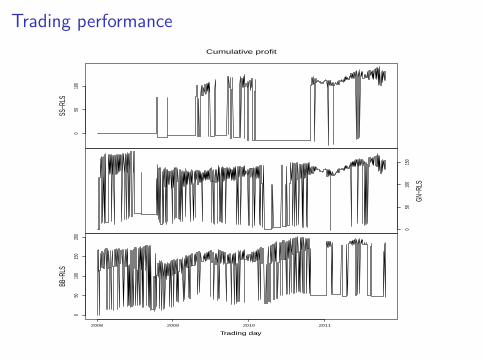
Trading performance
050
100
SS−R
LS
050
100
150
GN−R
LS
050
100
150
200
2008 2009 2010 2011
BB−R
LS
Trading day
Cumulative profit

Closing remarks
I Algorithmic pairs trading / statistical arbitrage require onlinemachine learning methods.
I Pattern recognition methods for mean reversion / segments ofstationarity.
I We develop variable forgetting factors for online learning.
I Other methods include sequential Monte Carlo.
I Need to take into account the shape of the distribution of thedata stream.
I Larger data streams / complex portfolios / many pairs toconsider simultaneously.
I Trading strategy can be improved.

References
I Elliott, R., Van Der Hoek, J., and Malcolm, W. (2005). Pairstrading. Quantitative Finance, 5:271-276.
I Haykin, S. (2001). Adaptive Filter Theory. Prentice Hall, 4thedition.
I Malik, M. B. (2006). State-space recursive least-squares withadaptive memory. Signal Processing, 86:1365-1374.
I Song, S., Lim, J.-S., Baek, S., and Sung, K.-M. (2000).Gauss-Newton variable forgetting factor recursive least squaresfor time varying parameter tracking. Electronics Letters,36:988-990.
I Triantafyllopoulos, K. and Montana, G. (2011). Dynamicmodeling of mean-reverting spreads for statistical arbitrage.Computational Management Science, 8:23-49.