department of electrical and electronic engineering ...hcommin/commintransferreport.pdf ·...
TRANSCRIPT

Department of Electrical and Electronic Engineering
Communications and Array Processing Group
Arrayed MIMO Radar
Harry Commin
MPhil/PhD Transfer Report
October 2010
Supervisor: Prof. A. Manikas

Abstract
MIMO radar is an emerging technology that is attracting the attention of both researchers and
practitioners, which employs multiple transmit signals and has the ability to jointly process signals
received at multiple receive antennas. In this report, the various MIMO radar configurations are
defined and discussed. Motivated by its suitability for the direct application of powerful modern
digital array signal processing techniques, the collocated arrays configuration is chosen as the focus
of this report. From this basis, a detailed discussion of performance bounds in array processing
is developed.
The parameter C is introduced as a figure of merit for comparing the performances of practical
direction-finding (DF) algorithms in terms of their superresolution capabilities. C takes values
between 0 and 1, with higher values indicating better resolving capability and C = 1 denotes an
algorithm with the theoretically ideal resolution performance.
Analytical expressions for C can be derived for a number of DF algorithms. In this report,
three such expressions are derived for MUSIC, ‘optimal’Beamspace MUSIC and Minimum Norm.
It is found that optimal beamspace MUSIC yields the smallest resolution separation, which can
approach the ideal when incident signals have equal powers.
Some preliminary work related to an investigation into the role of complex correlation coeffi -
cient is presented. In particular, the 2-emitter CRB is derived for arbitrary correlation, and an
accessible discussion of the spatial smoothing technique is presented. Finally, a variety of impor-
tant topics for significant future research are identified, emphasising the wide-ranging potential
for useful ongoing research contribution in the field of MIMO radar.
2

Contents
Abstract 2
Contents 3
Notation 5
1 Introduction 61.1 Array Configurations in MIMO Radar . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Parameter Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 SIMO Array Signal Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4 MIMO Radar Signal Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.5 The "Virtual Array" Concept in MIMO Radar . . . . . . . . . . . . . . . . . . . . 12
2 Performance Bounds in Array Processing 142.1 Uncertainty Hyperspheres and the Parameter C . . . . . . . . . . . . . . . . . . . 152.2 Theoretical Detection Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3 Theoretical Resolution Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4 Theoretical Estimation Error Bounds . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.1 Cramer-Rao Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.4.2 Other Estimation Error Bounds . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Algorithm Comparison using the Figure of Merit C 243.1 Main Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3 Correlated Signals and Spatial Smoothing . . . . . . . . . . . . . . . . . . . . . . 26
4 Conclusions and Future Work 294.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Appendix A Expressing Ideal Resolution Performance in Terms of ξmusic (s) 31
3

CONTENTS 4
Appendix B Lee and Wengrovitz’s Angular Separation Measure 36
Appendix C Ideal Resolution Performance for ULA 38
Appendix D Algorithm-specific Resolution Threshold Expressions 39
Appendix E 2-Source CRB (correlated signals) 41
Appendix F An Accessible Analysis of Spatial Smoothing 44F.1 Relating Source Covariance Matrices . . . . . . . . . . . . . . . . . . . . . . . . . 45F.2 Effective Source Signal Correlation . . . . . . . . . . . . . . . . . . . . . . . . . . 47F.3 Quantifying the Decorrelating Effect . . . . . . . . . . . . . . . . . . . . . . . . . 47F.4 Backward Spatial Smoothing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
References 50

Notation
a,A Scalara,A Column VectorA,A Matrix(A)ij (i, j)th element of A(·)T Transpose(·)H Conjugate transpose0N (N × 1) vector of zerosIN (N ×N) identity matrixa = vec(A) a is formed by stacking columns of AL [A] Linear subspace spanned by the columns of AL [A]⊥ Complement subspace to L [A]
PA , A(AHA
)−1AH Projection operator onto L [A]
P⊥A , I− PA Projection operator onto L [A]⊥
E {·} Expectation operatorN Number of array antennasL Number of data snapshotsM Number of signal sourcesρ Complex correlation coeffi cientRab Covariance matrix of a and bdiag (a) Matrix whose diagonal elements are given by aexp(a) Element-by-element exponential
5

Chapter 1
Introduction
Radar has received great research interest for many decades [1]. Its basic goal is to provide the
user with information about targets by estimating various parameters of interest (such as target
bearing, range and velocity). In early radar systems, this was achieved by mechanically steering a
directional transmit/receive antenna across the whole space and processing the (electromagnetic)
signals reflected back to the receiver. However, by instead employing an array of multiple antennas
at the transmitter and/or receiver, a number of important breakthroughs in radar theory have
since been made.
Firstly, using the concept of beamforming, an antenna array is able to coherently combine
signals to synthesise a concentrated directional beampattern. This beampattern can be steered
electronically, removing the need for any mechanical steering of the radar platform. Further-
more, with the development of powerful modern digital signal processing techniques, radar theory
has seen dramatic improvement in recent years. In particular, adaptive techniques such as op-
timal beamforming and superresolution direction-finding (DF) have attracted enormous research
interest [2].
The most sophisticated arrayed radar configuration is Multiple Input Multiple Output (MIMO),
whereby the system employs multiple transmit waveforms and has the ability to jointly process
signals received at multiple receive antennas. Due to the general nature of this definition, many
traditional radar configurations can be viewed as (restricted) special cases of the MIMO para-
digm. It is well documented in the literature that harnessing the full potential of MIMO could
offer numerous significant improvements in radar performance, compared to traditional methods.
6

1. Introduction 7
Particularly, since MIMO radars can jointly employ transmit and receive degrees of freedom after
the signal is received, the total number of degrees of freedom available to the system can be greatly
increased. This yields advantages including: improved resolution performance [3] and the ability
to simultaneously detect a higher number of targets (i.e. greater “parameter identifiability”) [4].
"Collocated arrays" is a typical configuration in MIMO radar, whereby transmit and receive
antenna arrays are situated close together (such that the directions to the targets are the same
for both arrays). This configuration will be the main focus of this report. In Section 1.1, all the
various MIMO configurations found in the literature will be reviewed and their relative strengths
and challenges discussed. It will be shown that the collocated configuration is particularly well-
suited to the direct application of adaptive array processing techniques and so the remainder of
this report will focus on such techniques. In Section 1.2, the concept of superresolution direction-
finding (DF) will be introduced. The fundamental bounds on DF performance of an array system
will then be defined and explored. The parameter C is introduced in order to characterise the
impact of practical DF algorithms on resolution performance. C is first derived in general terms,
then specific analytical expressions for C are derived and discussed for the MUSIC, optimal
Beamspace MUSIC and Minimum Norm algorithms for uncorrelated signals. Various topics of
ongoing and future work are discussed in Section 4 and finally the report is concluded in Section
4.1.
1.1 Array Configurations in MIMO Radar
When designing the general physical layout of the antenna arrays in MIMO radar, there are two
main approaches to consider:
1. Widely-separated Antennas [5]
(a) Radar targets are complex bodies composed of many scatterers and so the power of the
signal reflected back to the receiver can vary dramatically even for very small variations
in illumination/observation angle. This can cause severe performance degradation in
radar systems [6]. By distributing (transmit and/or receive) antennas far apart in
space, multiple independent aspects are obtained, significantly reducing the effect of
these fluctuations ("scintillations").

1. Introduction 8
(b) Another useful consequence of the highly diverse signal paths (transmitters to scatterers
to receivers) yielded by this configuration is that the fading properties of each path are
not fully correlated and so a signal decorrelation effect is observed.
(c) Finally, since the targets are illuminated/observed from multiple angles, their velocities
will be different relative to each widely-spaced antenna. This yields a range of different
Doppler frequencies (a “Doppler spread”) which can be exploited to improve moving
target detection (MTD) performance. Specifically, targets with low radial velocity
with respect to one antenna will tend to have a larger radial velocity with respect to
another widely-spaced antenna. Thus, MTD performance for targets which are diffi cult
to distinguish from background clutter is improved.
2. Closely-spaced antennas [7]
(a) Assuming a narrowband signal model, if transmit/receive elements are situated within
the "local region" of a common phase origin, then relative antenna displacements give
rise to consistent, predictable signal phase offsets. This allows array response vectors
to be defined as a function of the array (electrical properties and geometry) and signal
bearings. The array manifold is then defined as the locus of the array response vectors
across the whole parameter space. From this coherent basis, a family of extremely
powerful adaptive array processing techniques can be applied. (These will be discussed
in greater detail in Section 1.2).
In the literature, we find that these two approaches give rise to three possible MIMO radar
configurations:
1. Distributed MIMO Radar: Both transmitters and receivers are widely-separated.
2. Transmit Diversity MIMO Radar: Transmitters are widely-separated and receivers are in a
closely-spaced array.
3. Collocated MIMO Radar: Both transmitters and receivers are in closely-spaced arrays.
Furthermore, these arrays are situated close together (such that target bearings are the
same with respect to both arrays).

1. Introduction 9
Clearly, each of these approaches has their respective strengths and challenges. Transmit
Diversity MIMO Radar has received significant research interest, since it can be considered as
a hybrid approach that seeks to capitalise on the advantages offered by both closely-spaced and
widely-separated antennas [8, 9]. However, this report will be concerned with collocated MIMO
radar since it is the most suited to employing advanced adaptive array processing techniques. A
further major advantage of the collocated arrays configuration is that properties of the transmitted
vector signal are always known to the receiver and, similarly, parameters estimated at the receiver
can be fed back to the transmitter. This provides a basis for the development of novel collaborative
techniques whereby various transmitter characteristics (such as array geometry and waveform
design) can be adaptively optimised depending on parameters estimated at the receiver. Moreover,
the collocated arrays configuration has further practical advantages in that all processing can be
done in situ, without requiring a wireless communication link to a central processor.
1.2 Parameter Estimation
A large part of this report will focus on parameter estimation. In this report, targets are assumed
to be stationary with respect to the radar platform, allowing a strong focus to be placed on the
problem of estimating the directional parameters of targets (direction-finding). Early approaches
to direction-finding with sensor arrays involved simply steering (electronically) a directional beam
around in space and constructing a DF spectrum from the received signal power across the pa-
rameter space. To do this, a complex weight vector (generally designed to be ‘optimal’in some
sense) is used to linearly combine coherent signals into a beam. Since antenna characteristics are
independent of the direction of energy flow, a given weight vector provides the same beampattern
when applied to either transmitting or receiving arrays.
Many optimal beamformers can be found in the literature. The Conventional Beamformer,
due to Bartlett [10], simply uses the manifold vector as the weight vector, which acts to max-
imise expected output power in a data-independent sense. However, significant improvement in
DF performance is offered by beamformers that utilise the received array data (adaptive beam-
formers). A representative early example is Capon’s Maximum Likelihood Method1 [11], which
1For historical reasons, the Capon Beamformer is termed ‘maximum likelihood’, but it generally does notprovide a maximum likelihood estimate in a DF context. It is more correctly referred to as the Minimum VarianceDistortionless Response (MVDR) beamformer.

1. Introduction 10
minimises array output power (variance) subject to the linear constraint that the signal arriving
from the direction of interest is undistorted. While adaptive beamformers have much better reso-
lution performance and interference-rejection capability than data-independent methods, they are
also much more sensitive to modelling errors. Therefore, much research effort has been directed
towards robust adaptive beamforming in recent decades [12].
More recently, a new family of "subspace-based" methods (based on eigenanalysis of the ob-
served signal covariance matrix) have been developed. In general, they take a geometric approach
to the DF problem by seeking to estimate the (orthogonal) signal and noise subspaces (which to-
gether make up the N -dimensional complex space in which the array manifold resides). Manifold
vectors can then be orthogonally projected onto the estimated noise subspace and the norm of
the resulting vector provides a measure of proximity between the two. Repeating this process for
manifold vectors computed across the entire parameter space then provides a DF null spectrum.
(Alternatively, projections onto the signal subspace provide the inverse null spectrum, or "pseudo-
spectrum"). Representative examples are the MUSIC [13] and Minimum Norm [14] algorithms.
As discussed later in this section, the subspace-based approach is capable of yielding extremely
powerful DF performance and so will be a major topic of this report.
In addition to beamformers and subspace-based techniques, several other families of parameter
estimation algorithms can be found in the literature, such as Maximum Likelihood type [15,
Chapter 8] and Parallel Factor Analysis type [16] (of which ESPRIT [17] is a widely-used example).
However, the specific details of the many DF algorithms developed during recent decades are not
central to this report. Such algorithms are reviewed extensively in the literature (see, for example,
[2], [18] and [15, Chapters 7-9]). In this report, a more general theoretical framework will instead
be developed, before later returning to consider specific practical DF algorithms within that
framework.
1.3 SIMO Array Signal Model
In order to aid later discussion regarding direction-finding, a general SIMO (single input, multiple
output) array signal model will be derived first, before expanding to MIMO radar.
ConsiderM narrow-band plane wave signals impinging on an array of N sensors. The (N × 1)
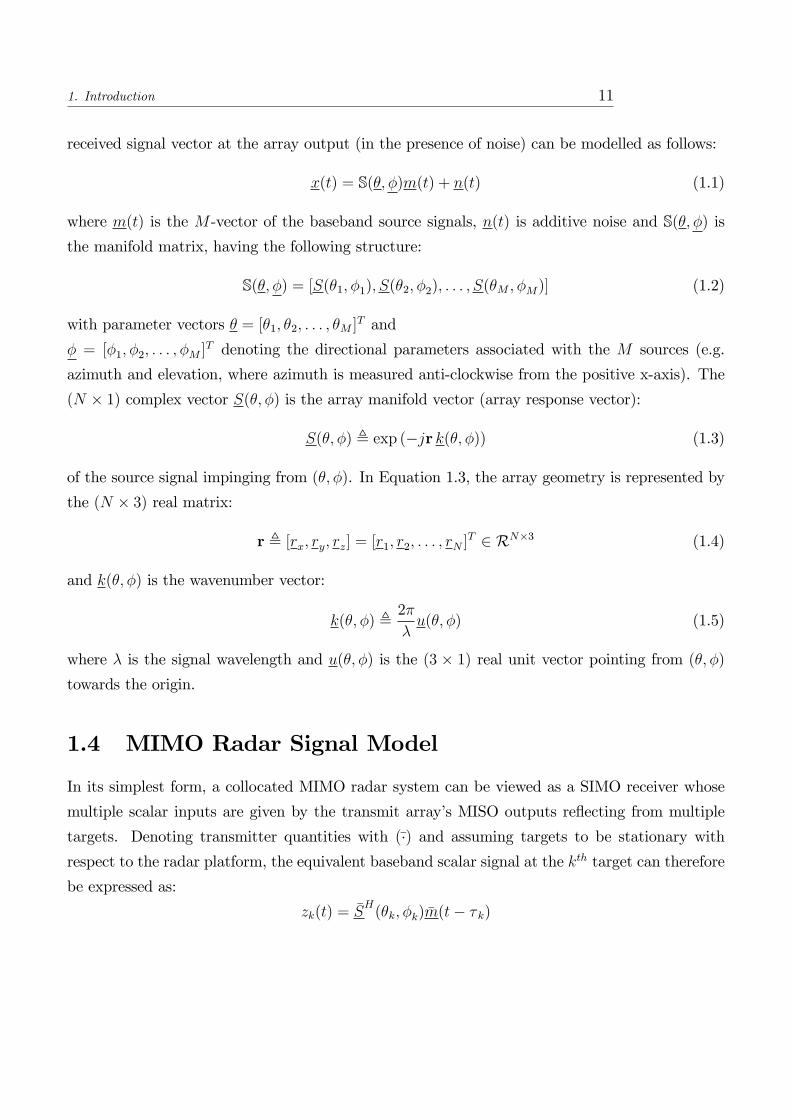
1. Introduction 11
received signal vector at the array output (in the presence of noise) can be modelled as follows:
x(t) = S(θ, φ)m(t) + n(t) (1.1)
where m(t) is the M -vector of the baseband source signals, n(t) is additive noise and S(θ, φ) is
the manifold matrix, having the following structure:
S(θ, φ) = [S(θ1, φ1), S(θ2, φ2), . . . , S(θM , φM)] (1.2)
with parameter vectors θ = [θ1, θ2, . . . , θM ]T and
φ = [φ1, φ2, . . . , φM ]T denoting the directional parameters associated with the M sources (e.g.
azimuth and elevation, where azimuth is measured anti-clockwise from the positive x-axis). The
(N × 1) complex vector S(θ, φ) is the array manifold vector (array response vector):
S(θ, φ) , exp (−jr k(θ, φ)) (1.3)
of the source signal impinging from (θ, φ). In Equation 1.3, the array geometry is represented by
the (N × 3) real matrix:
r , [rx, ry, rz] = [r1, r2, . . . , rN ]T ∈ RN×3 (1.4)
and k(θ, φ) is the wavenumber vector:
k(θ, φ) , 2π
λu(θ, φ) (1.5)
where λ is the signal wavelength and u(θ, φ) is the (3 × 1) real unit vector pointing from (θ, φ)
towards the origin.
1.4 MIMO Radar Signal Model
In its simplest form, a collocated MIMO radar system can be viewed as a SIMO receiver whose
multiple scalar inputs are given by the transmit array’s MISO outputs reflecting from multiple
targets. Denoting transmitter quantities with (·) and assuming targets to be stationary withrespect to the radar platform, the equivalent baseband scalar signal at the kth target can therefore
be expressed as:
zk(t) = SH
(θk, φk)m(t− τ k)

1. Introduction 12
where m(t) is the (N × 1) vector of transmit waveforms and τ k is the time taken for the signal
to propagate from the transmitter to the kth target. The (K × 1) vector signal at the K targets,
z(t) , [z1, z2, . . . , zK ]T , can then be considered to be somewhat analagous to m(t) in the SIMO
array signal model. Thus, assuming collocated arrays, the received signal vector at the array
output is given by:
x(t) =K∑k=1
βkS(θk, φk)SH
(θk, φk)m(t− 2τ k) + n(t) (1.6)
where βk is the complex fading coeffi cient associated with the kth target, which includes path
losses and the target’s radar cross section (RCS). An important point to note is that, unlike in
the general SIMO model, the cross-correlations of the signals at the targets increase as targets
move close together, even if transmit waveforms are orthogonal.
1.5 The "Virtual Array" Concept in MIMO Radar
A problem with the MIMO radar signal model given in Section 1.4 is that the degrees of freedom
are inconventiently distributed amongst the transmitter and receiver. Since the transmit and
receive arrays share a common phase origin, it would be desirable to devise a scheme whereby the
whole system operated coherently. Specifically, it would be constructive to translate all modelled
parameters at the transmitter across to the receiver (or vice versa), so their degrees of freedom
could be combined in a collaborative manner. In the literature, we find that an attempt has been
made to achieve this using the concept of the virtual array [19, 20]. However, we will see that
this approach has crucial flaws that prevent it from being directly applicable to our theoretical
framework at present.
The MIMO radar virtual array concept relies on N equipower, orthogonal transmit waveforms
that can be separated by N matched filters at the outputs of the N receiver antennas. Further-
more, it requires targets to be in the same range bin. In this case the received signal vector at
the output of the array can be written as:
x(t) = Sdiag(β)SHm(t) + n(t) (1.7)
where β , [β1, β2, . . . , βK ]T . The columns of S and S are given by the K source position vectors

1. Introduction 13
associated with the transmit and receive arrays, respectively. Thus, matched filtering yields:
y(t) = E{vec[x(t)mH(t)]}
= E{vec[(Sdiag(β)SHm(t) + n(t)
)mH(t)
]}(1.8)
Since transmit waveforms are orthogonal and equipowered, E{m(t)mH(t)} = IN . Similarly, sincenoise is white, E{n(t)mH(t)} = 0N×N and so:
y(t) = E{vec
[K∑k=1
βkS(θk, φk)SH
(θk, φk)
]}(1.9)
This can be written in the form:
y(t) = E{
K∑k=1
Sv(θk, φk)βk
}(1.10)
where the manifold vector of the virtual array has been defined as:
Sv(θk, φk) , vec[S(θk, φk)S
H(θk, φk)
](1.11)
While the virtual array geometry described by the virtual manifold vector appears promising at
first, the virtual array system as a whole has diffi culties. In particular, it is evident from Equation
1.10 that the virtual SIMO input signals are in fact given by the complex fading coeffi cients,
estimated during the matched filtering process. So, immediately the assumption must be made
that β will exhibit some degree of statistical variance from pulse to pulse (i.e. in slow time),
otherwise no virtual signal power can be observed by the virtual array. However, even if this
assumption is made (i.e. the Swerling II target model is assumed), analysis of the system is
still not straightforward. For example, the finite sampling effect seems diffi cult to define in this
context, since each estimate of β requires multiple snapshots, then each estimate of the covariance
matrix of the virtual array output, Ryy, requires multiple β estimates.Clearly, there are unresolved issues regarding the virtual array. However, since it offers a
potentially huge increase in the number of degrees of freedom, gaining an in-depth understanding
of the virtual array (or developing a more useful alternative) should be considered an important
topic for future research.
Chapter 2
Performance Bounds in Array
Processing
In general, the resolution performance of an array system is a function of array aperture and
number of sensors, N . In practice, these resources are limited and so it is desirable to achieve high
resolution performance without increasing the size of the array. Subspace-based techniques are
particularly powerful in this respect, since they are capable of exhibiting asymptotically infinite
resolving capability as the number of data snapshots, L, becomes large. In other words, they
belong to the family of "superresolution" DF techniques.
Since the number of snapshots available in practice is finite, the estimated statistics of the
noise-contaminated received signal are imperfect. This finite sampling effect therefore imposes
limits on system performance, even when the array is assumed to be calibrated. Specifically,
theoretical bounds on three key aspects of DF performance arise:
1. Detection Performance: the capability of a system to correctly estimate the number of
signals, M , impinging on the array.
2. Resolution Performance: the capability of a system to yieldM separate, distinct directional
parameter estimates corresponding to the M impinging signals.
3. Estimation Accuracy: the mean square error of the directional parameter estimates (which
can only be obtained following successful detection and resolution), with respect to true
target directions.14

2. Performance Bounds in Array Processing 15
In the case of detection and resolution, overall success depends particularly on the two most
closely-spaced sources. Detection and resolution performance can therefore each be characterised
by a different ‘threshold’separation, which must be satisfied in order for detection/resolution to be
achieved with high probability. These thresholds are dependent upon various system parameters
such as: signal-to-noise ratio (SNR), L, N , array geometry, source bearings, relative source powers,
signal correlation and the specific practical DF algorithm employed. In this report, the roles of all
these parameters will be explored in a general sense, except signal correlation; signals are assumed
to be uncorrelated. However, this is considered an extremely important topic for future research
and a preliminary discussion will be developed in Section 3.3.
In order to explore performance bounds in this chapter, the concept of uncertainty hyper-
spheres will first be introduced as a means to characterise the uncertainty in the system due to
the finite sampling effect. While Cramer-Rao bounds are used in the definition of uncertainty
hyperspheres, these will not be discussed in detail until later (in order to preserve the logical order
of: detection, then resolution, then estimation).
2.1 Uncertainty Hyperspheres and the Parameter C
For a given array, the array manifold is defined as the locus of the manifold vectors for all (θ, φ)
across the whole parameter space. In the presence of finite sampling effects, the uncertainty
remaining in the system (corresponding to a given point on the manifold) after L snapshots can
be represented using an N -dimensional hypersphere: It has been proven in [21, Ch. 8, p. 199]
Ndim complex observation space
Figure 2.1: Visualisation of an uncertainty hypersphere in an N -dimensional complex space.

2. Performance Bounds in Array Processing 16
that if the directional parameters, (θ, φ), are expressed as a function of the arc length of the
manifold curve, then the radius, σe, of the uncertainty hypersphere is given by the square root of
the single-source Cramer-Rao Lower Bound expressed in terms of the arc length of the manifold:
σe =1√
2 (SNR× L)(2.1)
This hypersphere therefore represents the smallest achievable uncertainty due to the presence
of noise after L snapshots. In other words, this performance would be achieved by the theoretically
‘ideal’DOA estimation algorithm, whereby any inter-dependency between the various parameters
of the multiple received signals (such as cross-correlation) have been somehow eliminated and no
additional uncertainty has been introduced.
For any non-ideal practical algorithm, this radius will be larger. To model this effect, the
parameter C (where 0 ≥ C > 1) is introduced, which acts to scale the hyperspheres accordingly:
σe =1√
2 (SNR× L)C(2.2)
Clearly, if analytical expressions can be obtained for C for different practical algorithms, then
C can be used as a useful figure-of-merit parameter to compare their performances. This could
provide important insight in a number of ways. Firstly, it will give a clear indication of which
algorithm is the superior for a given scenario (higher value of C denotes superiority). Secondly, if
C is found to be close to 1, then it can immediately be concluded that the algorithm is near-ideal
for that scenario. In other words, if system performance is still unsatisfactory, then there is no
point in considering the use of a more complex algorithm; more favourable scenario parameters
must be sought (for example, by increasing signal powers or the array aperture). Finally, since
C contains all the non-idealities of a given algorithm (and only its non-idealities), the analytical
form of C may provide some insight regarding the cause of these imperfections (and therefore how
to eliminate them).
In Chapter 3, several algorithm-specific expressions for C will be derived and discussed.

2. Performance Bounds in Array Processing 17
2.2 Theoretical Detection Bounds
Detection fails when the estimated number of signals impinging on the array falls below M . For
a subspace-based method, this occurs when the dimensionality of the signal subspace falls below
M . Detection threshold therefore occurs when two uncertainty hyperspheres just overlap (such
that those two sources tend to contribute just one signal eigenvector). This geometrical scenario
is shown in Figure 2.2.
Figure 2.2: Detection threshold occurs when the uncertainty hyperspheres just touch.
It is shown in [21, Ch. 8], that this geometrical model leads to the ‘square root law’ for
detection:
∆pdet−thr =1
s(p1+p22
)(σe1 + σe2) (2.3)
where p represents a directional parameter, such as θ, φ or cone angles [22]. s (p) is the rate of
change of manifold arc length at point p and κ1 is the manifold’s principal curvature (where κ1
also takes into account the inclination angle of the manifold). For a parameterisation in terms of
θ, these properties of the manifold are related to familiar system parameters as follows [23]:
s (θ) = π cos (φ) ‖Rθ‖ (2.4)
κ1 (θ) ≈∥∥∥Rθ
∥∥∥2
(2.5)
κ1 (θ) =
√κ2
1 (θ)−∣∣∣1TN R3
θ
∣∣∣2 (2.6)

2. Performance Bounds in Array Processing 18
where Rθ ,(ry cos (θ)− rx sin (θ)
)and Rθ ,
Rθ‖Rθ‖
.
This allows us to compare ideal detection capability for a variety of array geometries and
scenario parameters, as shown in Figure 2.3.
0 20 40 60 80 100 120 140 160 1805
0
5
10
15
20
Azimuth (degrees)
(SN
RxL
) det,t
hr (d
B)ULANonuniform LinearCircularYshaped
Figure 2.3: Example comparing the ideal detection capabilities of various 25-element uniformly-spaced arrays (dr = λ/2) as a function of azimuth. φ0 = 30◦, P1/P2 = 0.6, ∆θ = 1◦.
2.3 Theoretical Resolution Bounds
Resolution fails when the number of directional parameter estimates falls below M . For a
subspace-based method, this occurs when the number of intersections between the estimated
signal subspace and the array manifold falls below M . The geometry of the resolution threshold
scenario is shown in Figure 2.4, where the signal subspace associated with two sources first fails
to form two distinct intersections with the array manifold.
It is shown in [21, Ch. 8], that this geometrical model leads to the ‘fourth root law’ for
resolution:
∆pres−thr =1
s(p1+p22
)4
√4(
κ21 − 1
N
) (√σe1 +√σe2)
(2.7)
where κ1 is the manifold’s principal curvature and κ1 also takes into account the inclination angle
of the manifold. Again, using the expressions given in [23], a comparison of various ideal resolution

2. Performance Bounds in Array Processing 19
Figure 2.4: Resolution threshold occurs when the worst-case estimated signal subspace justtouches the array manifold.
capabilities for a variety of array geometries and scenario parameters is shown in Figure 2.5.
2.4 Theoretical Estimation Error Bounds
In the literature, a number of approaches can be found that seek to describe lower bounds on
estimation accuracy. These generally involve a discussion of the estimated parameter vector’s
error covariance matrix (since, for unbiased estimators, mean square error and error variance
are equal). Specifically, they seek to set a lower bound on the error covariance matrix of any
estimate, p, of the true parameter vector p , [p1, p2, . . . , pM ]T . In our discussion, a deterministic
signal model [24, 25] is assumed.
2.4.1 Cramer-Rao Bounds
The most popular estimation error bound in array processing is the Cramer-Rao Bound (CRB).
It is a statistical result, based on the inversion of the appropriate Fischer information matrix with
dimension equal to the total number of unknown parameters. Since, in the deterministic model,
the unknown parameters consist of both parameters of interest (DOAs) and nuisance parameters
(e.g. noise variance and complex signal amplitudes), we are actually only interested in a relatively
small submatrix of the inverse Fischer information matrix. An explicit formulation of the relevant

2. Performance Bounds in Array Processing 20
0 20 40 60 80 100 120 140 160 18015
20
25
30
35
40
45
50
55
Azimuth (degrees)
(SN
RxL
) res,
thr (d
B)
ULANonuniform LinearCircularYshaped
Figure 2.5: Example comparing the ideal resolving capabilities of various 25-element uniformly-spaced arrays (dr = λ/2) as a function of azimuth. φ0 = 30◦, P1/P2 = 0.6, ∆θ = 1◦.
submatrix was first introduced in [26] for the single parameter case (e.g. azimuth only), based on
the following assumptions [21]:
A1: N > M and the manifold vectors are independent.
A2: Noise is a zero-mean, temporally white Gaussian process.
A3: Noise is spatially white (from sensor to sensor).
A4: All parameters other than p are known a priori.
The exact Cramer-Rao lower bound on the covariance matrix of the unbiased estimate p of
parameter vector p is given as:
CRB(p) =σ2n
2
(L∑t=1
Re[MH (t)HM (t)
])−1
(2.8)
whereM (t) , diag (m (t)) and H , SHP⊥S S, with P⊥S defined as in the Notation section and S thematrix of manifold vectors differentiated with respect to p. However, a significantly more easily
evaluated (and therefore popular) result is the asymptotic CRB for large L. That is1:
1Note also that a simple extension to the multiple-parameter case (e.g. azimuth, elevation, range) was presentedby Yau and Bresler [27] (also see [28, p. 53])

2. Performance Bounds in Array Processing 21
CRB(p) =σ2n
2L
(Re[H� RTmm
])−1
for suffi ciently large L (2.9)
Since these expressions involve a projection of S (i.e. the sensitivity of the manifold vectors tovariations in p) onto the noise subspace, it can be observed that ultimate estimation accuracy will
therefore increase as the S gradient vectors approach orthogonality to the signal subspace. This
degree of orthogonality is determined by how steeply the array manifold varies for small changes
in p about the direction of interest, pk. Thus, the shape of the array manifold is profoundly and
fundamentally important in determining an array system’s ultimate estimation accuracy. (This
was clearly also the case for detection and resolution).
In practice, we find (see e.g. [21, Fig. 8.4]) that, as angular separation become suffi ciently
large, the CRB in the multiple-emitter scenario approaches the equivalent single-emitter value.
In other words, a wide range of scenarios can be characterised using just two expressions (given
here in terms of geometric properties of the array manifold):
1. The single-emitter CRB:
CRB1[p1] =1
2(SNR× L)s(p1)(2.10)
2. The 2-emitter CRB (for closely-spaced emitters):
CRB2[p1|A] =1
(SNR× L)
2
s(p1)2∆s2(κ21 − 1
N)
(2.11)
where A is the array manifold.While most of this report considers only uncorrelated sources and leaves arbitrary complex
correlation coeffi cient as a topic for future reseach, a new derivation will be presented here. A
partial derivation of the 2-emitter CRB for correlated sources is given in [21, p. 184]. In Appendix
E, this proof is completed by considering the circular approximation to the array manifold. This
yields the final result:
CRB2 [p1] =1
2 (SNR1 × L) s (p1)2
4
(∆s)2 (κ21 (p)− 1
N
) 1(1− Re2[ρ]
P1P2
) (2.12)

2. Performance Bounds in Array Processing 22
It is very interesting to note that this expression comprises three separate contributions:
CRB2 [p1] = CRB1 [p1]×G× S
whereby CRB1 [p1] is the single-source CRB. The real scalar G is a ‘geometry’term, reliant upon
the shape of the array manifold in the neighbourhood of s. Finally, S is a ‘signal’term, dependent
on the statistical properties of the source signals. Clearly, only the real part of the correlation
coeffi cient effects the CRB, but this effect can be reduced by increasing signal powers (which is
consistent with our intuition, when we consider the distribution of data snapshots on the signal
subspace as a function of P1, P2 and ρ).
2.4.2 Other Estimation Error Bounds
Despite its widespread use in the literature, the CRB can be found to be somewhat inadequate
in providing a reliable, tight bound. This is for two main reasons:
1. There exists some threshold (SNR× L), below which the estimation accuracy deviates from
its linear behaviour. The CRB fails to model this large error region (see Figure 2.6).
2. The "estimation error threshold" at which this occurs is not straightforward to predict, so
it is diffi cult to be certain as to exactly what range of (SNR× L) values the CRB is valid
for.
For this reason, estimation error bounds are generally divided into two classes that deal with
each region separately: small-error bounds and large-error bounds (where the CRB is an example
of a small-error bound). Other small-error bounds include the Bhattacharyya inequality (see [29]
and references therein).
The non-linear, high-error region is significantly more computationally complex to model.
Indeed, the original Barankin Lower Bound has therefore seen a number of simplifications, such
as the Chapman and Robbins, Hammersley and Kiefer approaches (and hybrids thereof). These
bounds are discussed in more detail in [15, pp. 1106-1107] and references therein.

2. Performance Bounds in Array Processing 23
CRB
Asymptotic RegionLarge Error RegionNo InformationRegion
SNR x L (dB)
MSE Estimation Error
Threshold
ResolutionThreshold
Figure 2.6: Typical MSE behaviour of a direction finding estimator as a function of (SNR× L),compared with Cramer-Rao bound. (Adapted from: [29]). In a multiple-source scenario, the "NoInformation Region" refers to the sub-resolution-threshold region.

Chapter 3
Algorithm Comparison using the Figure
of Merit C
In Section 2.1, the parameter C was introduced as a figure of merit for comparing superresolution
DF algorithm performance. In this chapter, various algorithm-specific analytical expressions for
C will be derived by studying the resolution capabilities of each algorithm in context to the
theoretically ideal.
3.1 Main Results
By substituting the algorithm-specific resolution threshold expressions given in Appendix D into
the expressions for ideal resolution performance derived in Appendices A and C and using the
relationship derived in Appendix B, the main results of this chapter are now presented. Specifi-
cally, the C parameters for MUSIC, Minimum Norm and optimum Beamspace MUSIC are given
in Equations 3.1-3.4:
24
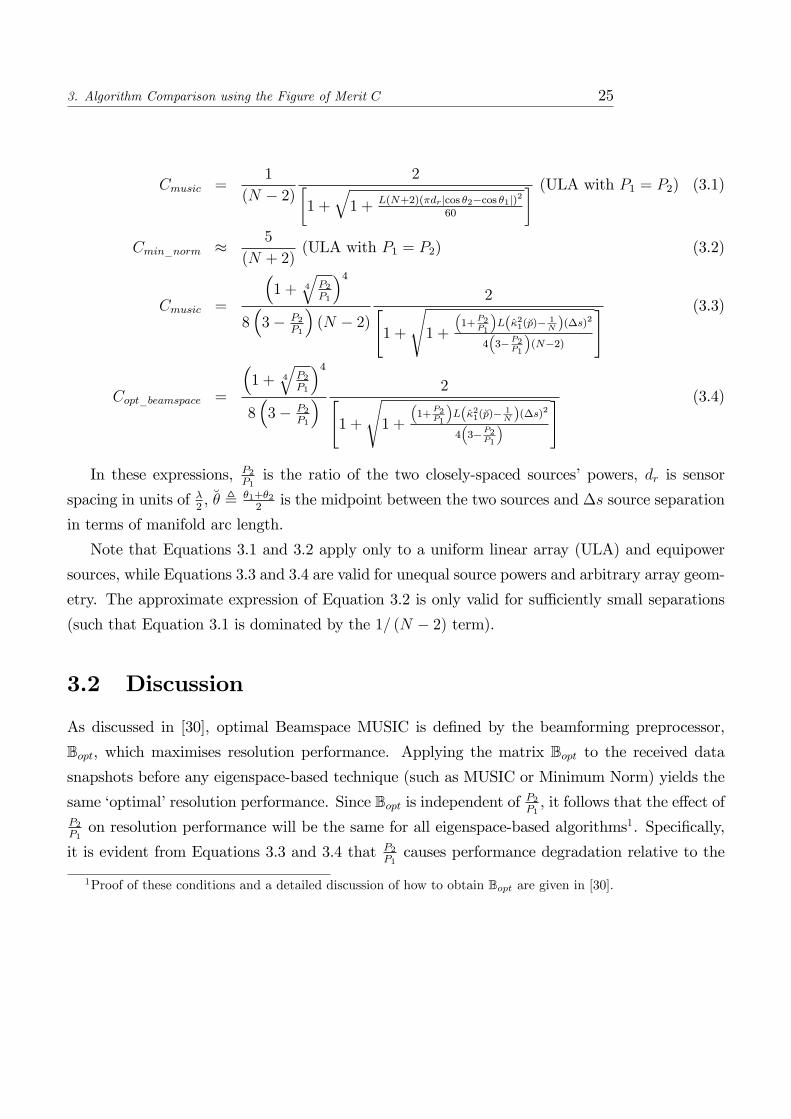
3. Algorithm Comparison using the Figure of Merit C 25
Cmusic =1
(N − 2)
2[1 +
√1 + L(N+2)(πdr|cos θ2−cos θ1|)2
60
] (ULA with P1 = P2) (3.1)
Cmin_norm ≈ 5
(N + 2)(ULA with P1 = P2) (3.2)
Cmusic =
(1 + 4
√P2P1
)4
8(
3− P2P1
)(N − 2)
2[1 +
√1 +
(1+
P2P1
)L(κ21(p)− 1
N )(∆s)2
4(
3−P2P1
)(N−2)
] (3.3)
Copt_beamspace =
(1 + 4
√P2P1
)4
8(
3− P2P1
) 2[1 +
√1 +
(1+
P2P1
)L(κ21(p)− 1
N )(∆s)2
4(
3−P2P1
)] (3.4)
In these expressions, P2P1is the ratio of the two closely-spaced sources’powers, dr is sensor
spacing in units of λ2, θ , θ1+θ2
2is the midpoint between the two sources and ∆s source separation
in terms of manifold arc length.
Note that Equations 3.1 and 3.2 apply only to a uniform linear array (ULA) and equipower
sources, while Equations 3.3 and 3.4 are valid for unequal source powers and arbitrary array geom-
etry. The approximate expression of Equation 3.2 is only valid for suffi ciently small separations
(such that Equation 3.1 is dominated by the 1/ (N − 2) term).
3.2 Discussion
As discussed in [30], optimal Beamspace MUSIC is defined by the beamforming preprocessor,
Bopt, which maximises resolution performance. Applying the matrix Bopt to the received datasnapshots before any eigenspace-based technique (such as MUSIC or Minimum Norm) yields the
same ‘optimal’resolution performance. Since Bopt is independent of P2P1 , it follows that the effect ofP2P1on resolution performance will be the same for all eigenspace-based algorithms1. Specifically,
it is evident from Equations 3.3 and 3.4 that P2P1causes performance degradation relative to the
1Proof of these conditions and a detailed discussion of how to obtain Bopt are given in [30].

3. Algorithm Comparison using the Figure of Merit C 26
equipower case, approximately given by:
Ceigenspace ≈
(1 + 4
√P2P1
)4
8(
3− P2P1
) Ceigenspacegiven
P2P1
=1
(3.5)
which can be approximated by:
Ceigenspace ≈
(4 + 21P2
P1
)25
× Ceigenspacegiven
P2P1
=1
for P2P1& 0.05.
From Equations 3.1-3.3, it can be seen that MUSIC (with arbitrary array geometry) and Min-
imum Norm (ULA geometry) can both exhibit near-ideal performance for 3-element arrays whenP2P1
= 1. However, optimal Beamspace MUSIC can also achieve near-ideal resolution performance
for larger arrays (N > 3), when P2P1
= 1 and the following condition holds:
L(κ2
1(p)− 1N
)(∆s)2
4� 1 (3.6)
Since, (∆s)2 ≈ s(θ)2 |θ2 − θ1|2 (which grows rapidly with increasing N), this condition gener-ally holds for small L, N and |θ2 − θ1|. In Figure 3.1, the C parameters for the three algorithms
are compared for ULAs with increasing numbers of sensors.
In Figure 3.2, the variation of C as a function of azimuth is shown (where the shape of the plot
depends on the array geometry).Optimum Beamspace MUSIC clearly exhibits the best resolution
performance, but its superiority is less outstanding for larger source separations. The same effect
can also be observed for larger numbers of snapshots.
A general trend is that these algorithms perform closer to the ideal when N , L and |θ2 − θ1|are restricted, but there may be considerable scope for improvement by future algorithms that
can better utilise the greater resolving capacity of the system as these quantities increase.
3.3 Correlated Signals and Spatial Smoothing
Our discussion so far has considered only uncorrelated signals. In practice, signals are often
correlated (particularly as radar targets become closely-spaced) and it is well-known that this can

3. Algorithm Comparison using the Figure of Merit C 27
Figure 3.1: Copt_beamspace, Cmin_norm and Cmusic as a function of the number of sensors, N , for aULA. In each case, θ1 = 34◦, θ2 = 35◦, P2
P1= 1 and L = 100.
MUSIC
opt. Beamspace
Figure 3.2: Copt_beamspace and Cmusic for various source separations (for a 25-element uniformX-shaped array) with P2
P1= 1 and L = 100. Since Cmusic is relatively insensitive to changes in
|θ2 − θ1|, the separate traces cannot be distinguished.

3. Algorithm Comparison using the Figure of Merit C 28
severely degrade resolution performance. A popular method of ‘decorrelating’signals is spatial
smoothing [31]. In [32], it is shown that, for two equipowered, fully-correlated (coherent) sources
impinging on a ULA, the resolution performance of the forward-backward spatially-smoothed
MUSIC algorithm is worse by a factor of approximately 4 (Nπdr |cos θ2 − cos θ1|)−2, compared to
the standard, uncorrelated case. However, this result does not provide a great deal of insight into
the effect of arbitrary complex correlation coeffi cient, ρ; like many results found in the literature,
only the fully coherent signals problem is considered (motivated by the multipath propagation
problem in mobile communications, where the primary concern is simply to restore the correct
rank to the resulting covariance matrix).
A major topic for future research related to this project will be to gain a comprehensive
understanding of the impact of ρ on DF performance. As a part of this, it would be constructive
to also fully understand the impact of employing a given decorrelating technique in a correlated
signal environment. In the case of spatial smoothing, we find that there is a trade-off in that a
decorrelation effect can be obtained at the expense of a reduced effective array aperture and with
restrictions imposed on the usable array geometry. However, discussions in the literature on this
topic seem to be particularly inaccessible. Specifically, there seems to be some confusion regarding
the nature of valid subarray geometries and little attention seems to be paid to the analysis of
non-coherent (partially correlated) signals. Therefore, an accessible basic analysis of conventional
and backward spatial smoothing is presented in Appendix F in order to clarify a number of such
points.

Chapter 4
Conclusions and Future Work
4.1 Conclusions
In this report, the various MIMO radar configurations have been defined and compared. Using
the collocated arrays configuration as a basis, a general discussion of parameter estimation in
array processing was then developed. The theoretical performance bounds imposed by the finite
sampling effect on an array system were defined and discussed in detail. The parameter C was
proposed as a figure of merit for comparing superresolution DF algorithms. Representative exam-
ple analytical expressions were derived for the MUSIC, optimal Beamspace MUSIC and Minimum
Norm algorithms (for uncorrelated signals). It was found that, when sources have equal powers,
all these algorithms can offer near-ideal resolution performance for 3-element arrays. However,
only optimum Beamspace MUSIC can achieve this for larger arrays.
Some preliminary work related to the analysis of complex correlation coeffi cient was presented.
In particular, the 2-emitter CRB was derived for arbitrary ρ, and an accessible discussion of the
spatial smoothing technique was presented.
4.2 Future Work
In Section 1.5, a MIMO radar virtual array model was discussed and found to be somewhat flawed.
However, the general concept of reformulating the MIMO signal model into an equivalent SIMO
or MISO system remains a powerful one and should therefore be afforded considerable research
29

4. Conclusions and Future Work 30
effort.
Only a very limited proportion of this report was related to the study of correlated sources.
However, as discussed in Section 3.3, understanding the impact of signal correlation of DF per-
formance is of paramount importance. One possible way to expand our theoretical framework to
allow further insight into this problem could be to slacken the constraint on the definition of the
uncertainty hypersphere’s radius. That is, it should seek to characterise the performance of the
algorithm which is ideal in every sense except with respect to non-zero correlation.
There are several important scenario considerations (in addition to signal correlation) that have
been neglected entirely in this report. Perhaps the most important is non-zero target velocity.
Estimating target velocities by Doppler processing is often a key requirement in radar and so the
system model will need to be changed in order to account for (and ultimately estimate) these
frequency shifts.
Another important consideration is clutter. In radar, signals don’t just reflect back off tar-
gets, but also off clouds, the ground, or any number of objects that we are not interested in.
Distinguishing clutter from targets and rejecting the clutter (whilst preserving as many degrees
of freedom as possible for parameter estimation) is an important challenge.
A further assumption that was made in this report was the narrowband signal assumption.
However, wideband and ultra-wideband MIMO radar are attracting increasing research interest.
This would require a somewhat radical reconsideration of the MIMO system model, since signal
amplitudes and phases will tend to vary across the aperture of the array under the wideband
assumption.
Finally, perhaps the most promising topic for future research will be the development of novel
collaborative techniques, whereby various transmitter characteristics (such as array geometry
and waveform design) can be adaptively optimised depending on parameters estimated at the
receiver. This process of feeding information back from the receiver to the transmitter could be
a particularly powerful utilisation of the collocated MIMO radar configuration.

Appendix A
Expressing Ideal Resolution
Performance in Terms of ξmusic (s)
In this appendix, numerous results are used from [21, Ch. 8]. For notational compatibility,
manifold vectors will therefore be denoted using a (s) here.
The MUSIC [13] null spectrum is given by:
ξmusic (s) = aH (s)P⊥A a (s)
We wish to explore the value in the MUSIC null spectrum associated with the arc length s between
the two sources at s1 and s2. That is:
ξmusic (s) = aH (s)P⊥Aa (s)
= aH (s) (IN − PA) a (s)
= N − aH (s)PAa (s)
The geometric layout is shown in Figures A.1-A.2:
Using these figures, expressions for the required inner product, aH (s)P⊥Aa (s), will now be
developed. In order to do this, a number of related geometric quantities, shown in Figure A.2,
must first be derived:
By first considering the entire (blue) right-angled triangle of Figure A.2, it is clear that:
31

A. Expressing Ideal Resolution Performance in Terms of ξmusic (s) 32
Centre ofCurvature
Origin
Figure A.1: Circular approximation of the array manifold, in the neighbourhood of s.
Centre ofCurvature
Origin
Figure A.2: "Side-on" view, showing a (s) and its orthogonal projection onto the signal subspaceL ([a1, a2]).
cos (γ1) =1
κ1
√N
Using this result, the cosine rule can now be applied to Figure A.3 to determine the angle γ2
between a (s) and PAa (s).
First the length ‖b‖ is evaluated:
‖b‖2 =1
κ21
(1− cos ∆ψ)2 +N − 2
√N
κ1
(1− cos ∆ψ) cos (θ1)
=1
κ21
(χ2 − 2χ
)+N

A. Expressing Ideal Resolution Performance in Terms of ξmusic (s) 33
Figure A.3: Geometric quantities required in the derivation of aH (s)P⊥Aa (s).
where, for notational convenience, χ , (1− cos ∆ψ). Now, applying the cosine rule again:
1
κ21
χ2 =1
κ21
(χ2 − 2χ
)+ 2N − 2
√N
√1
κ21
(χ2 − 2χ) +N cos (γ2)
cos (γ2) =
(N − χ
κ21
)√N√
1κ21
(χ2 − 2χ) +N
The inner product aH (s)PAa (s) can now be evaluated by considering the appropriate right
angled triangle (including the yellow shaded region in Figure A.2). That is, aH (s)PAa (s) =∥∥aH (s)∥∥ ‖PAa (s)‖ cos γ2 = N cos2 γ2 and so:
aH (s)P⊥Aa (s) = aH (s) (IN − PA) a (s)
= N −N cos2 γ2
= N −
(N − χ
κ21
)2(1κ21
(χ2 − 2χ) +N)
By separately evaluating the numerator and the denominator, it is relatively straightforward to
show:
aH (s)P⊥Aa (s) = N −N2 + 2
κ21
[(N − 1
κ21
)(cos ∆ψ − 1)− 1
8‖∆a‖2
]N − ‖∆a‖
2
4
Following a series of straightforward but tedious manipulations, this reduces to:
aH (s)P⊥Aa (s) =
(κ2
1 −1
N
) Nκ41
(cos ∆ψ − 1)2(N − ‖∆a‖
2
4
)

A. Expressing Ideal Resolution Performance in Terms of ξmusic (s) 34
At this stage, the following approximations are used:
Approximation 1 :
cos ∆ψ =
√1− 1
4‖∆a‖2 κ2
1
≈
√(1− 1
8‖∆a‖2 κ2
1
)2
= 1− 1
8‖∆a‖2 κ2
1
Assumption used:1
64‖∆a‖4 κ4
1 �1
4‖∆a‖2 κ2
1
‖∆a‖2 κ21 � 16
Note 1: Since κ1 =∥∥r2∥∥, where ‖r‖ = 1 [21, Table 8.2, p. 186], it follows that κ1 ≤ 1.
Note 2: Since κ1 = κ1 sin ζ [21, Eq. 8.12], κ21 ≤ κ2
1).
Approximation 2 : (N − ‖∆a‖
2
4
)≈ N
Assumption used:
N � ‖∆a‖2
4
Therefore,
aH (s)P⊥Aa (s) ≈(κ2
1 −1
N
) Nκ41
(18‖∆a‖2 κ2
1
)2
N
=
(κ2
1 −1
N
)(1
8‖∆a‖2
)2
=
(κ2
1 − 1N
)(∆s)4
64(A.1)
A. Expressing Ideal Resolution Performance in Terms of ξmusic (s) 35
Now, substituting into Equation D.1 yields:
(SNR2 × L)res =
(1 + 4
√P2P1
)4
32ξmusic(θ)× C(A.2)
which concludes the proof.

Appendix B
Lee and Wengrovitz’s Angular
Separation Measure
In this appendix, it is proven that the angular separation measure,∆, given by Lee andWengrovitz
in [30] is, in fact, a scaled small-angle approximation to the change in manifold arc length, ∆s.
The parameter ∆ is given as:
∆2 , k2
N
N∑i=1
[rTi (u(θ2)− u(θ1))
]2=
1
N‖r (k(θ2)− k(θ1))‖2
We know k(θ2)− k(θ1) = π [cosφ(cos θ2 − cos θ1), cosφ(sin θ2 − sin θ1), 0]T and so:
∆2 =π2
Ncos2 φ
N∑i=1
[rxi(cos θ2 − cos θ1) + ryi(sin θ2 − sin θ1)]2
=π2
Ncos2 φ[‖rx‖
2 (cos θ2 − cos θ1)2 +∥∥ry∥∥2
(sin θ2 − sin θ1)2
+ 2rTx ry(cos θ2 − cos θ1)(sin θ2 − sin θ1)
For suffi ciently small |θ2 − θ1|, we have:
cos θ2 − cos θ1 ≈ − sin(θm) |θ2 − θ1|
sin θ2 − sin θ1 ≈ cos(θm) |θ2 − θ1|36

B. Lee and Wengrovitz’s Angular Separation Measure 37
Therefore:
∆2 ≈ π2
Ncos2 φ[‖rx‖
2 (sin(θm) |θ2 − θ1|)2 +∥∥ry∥∥2
(cos(θm) |θ2 − θ1|)2
− 2rTx ry(sin(θm) |θ2 − θ1|)(cos(θm) |θ2 − θ1|)]
=π2
Ncos2 φ |θ2 − θ1|2
[‖rx‖
2 sin(θm)2 +∥∥ry∥∥2
cos(θm)2 − 2rTx ry sin(θm) cos(θm)]
∆ ≈ 1√N|θ2 − θ1| s(θm)
≈ 1√N
∆s for suffi ciently small |θ2 − θ1|
which concludes the proof.

Appendix C
Ideal Resolution Performance for ULA
For a ULA with its phase centre taken to be its centroid (with antenna spacing dr), the sensor
locations are given by:
rx = dr
[−(N − 1)
2,−(N − 1)
2+ 1, . . . ,
(N − 1)
2
]T(C.1)
Using the method of finite differences, it is easily shown that:
‖rx‖ =dr√12
√(N3 −N) (C.2)
Then, using this result, we similarly find:
κ1 =
∥∥∥∥ rx‖rx‖
� rx‖rx‖
∥∥∥∥ =
√3(3N2 − 7)
5(N3 −N)(C.3)
For symmetric linear arrays, κ1 = κ1. Substituting Equations C.2 and C.3 into Equation D.1 and
setting P2P1
= 1 then yields:
(SNR2 × L)res =5760 (πdr |cos θ2 − cos θ1|)−4
N (N2 − 1) (N2 − 4)× C (C.4)
38

Appendix D
Algorithm-specific Resolution Threshold
Expressions
In this Appendix, analytical expressions are derived for the parameter C for MUSIC, optimal
Beamspace MUSIC and Minimum Norm. In order to do this, in each case, an algorithm-specific
resolution threshold expression is first required. Specifically, the results first derived in [33-34]
will be used.
In order to match the conventions of algorithm-specific threshold expressions found in the
literature, it is constructive to express the theoretically ideal resolution performance of Equation
2.7 in terms of (SNR× L):
(SNR2 × L)res =2
∆p4s(p1+p2
2
)4 (κ2
1 − 1N
)C
(1 + 4
√P2
P1
)4
(D.1)
Resolution threshold expressions for each algorithm will now be considered and compared to
Equation D.1.
Following a small modification1, the resolution threshold for the MUSIC algorithm (first de-
1Since the resolution threshold expression given in [33] implies above-ideal performance for suffi ciently smallN , we replace [33, Equation B.1] with a more accurate Taylor expansion. The resulting threshold expression thenagrees with [35].
39

D. Algorithm-specific Resolution Threshold Expressions 40
rived by Kaveh and Barabell in [33]) is shown in Equation D.2:
(SNR× L)(ULA,P1=P2)music =
2880 (πdr |cos θ2 − cos θ1|)−4
N(N2 − 1)(N + 2)
1 +
√1 +
L(N + 2) (πdr |cos θ2 − cos θ1|)2
60
(D.2)
It is valid for two equipower, uncorrelated sources impinging on a uniform linear array (ULA).
In the literature, several attempts to derive the equivalent threshold condition for the Minimum
Norm algorithm can be found. However, these analyses yield different results2. In the absence
of a single, widely-accepted threshold expression, it is simply considered here that Minimum
Norm’s resolution performance is superior to MUSIC’s, according to the following approximate
relationship:
(SNR× L)min_norm ≈(N + 2)
5 (N − 2)(SNR× L)music (D.3)
The above expressions are valid only for equipower sources and ULAs. However, the following
threshold expressions (derived by Lee and Wengrovitz in [30]) are valid for unequal source powers
and arbitrary array geometry:
(SNR2 × L)music =
(3− P2
P1
)(N − 2)
8ξmusic(θ)
1 +
√√√√√1 +16(
1 + P2P1
)Lξmusic(θ)(
3− P2P1
)(N − 2) ∆2
(D.4)
(SNR2 × L)opt_beamspace =
(3− P2
P1
)8ξmusic(θ)
1 +
√√√√√1 +16(
1 + P2P1
)Lξmusic(θ)(
3− P2P1
)∆2
(D.5)
It should be noted that Equation D.1 shows dependency on properties of the differential
geometry of the array manifold. In order to obtain compact expressions for C, Equation D.1
must therefore first be manipulated into a more amenable form. As shown in Appendix C, this
task is simplified significantly by first restricting analysis to the ULA geometry. Furthermore, in
Appendix A, Equation D.1 is expressed in terms of ξmusic(θ) for arbitrary array geometry.
2In [35], an improvement in resolution performance over MUSIC by a factor of approximately 5 (N−1)(N−2)(N−3)(N+2) is
suggested. Meanwhile, a factor of about 5 (N−2)(N+2) can be found in [36]. A similar (but not identical) improvement
of approximately 5 (N−2)(N+2) is also found in [34].

Appendix E
2-Source CRB (correlated signals)
The CRB corresponding to the signal arriving from p1 is given by [21, Eq. 8.36]:
CRB [p1] =1
2 (SNR1 × L)
1
aH1 P⊥A a1
1
1− Re2[ρaH2 P⊥A a1]P1P2(aH1 P⊥A a1)(aH2 P⊥A a2)
(E.1)
Since a1 = u11s (p1) and a2 = u12s (p2), this becomes:
CRB [p1] =1
2 (SNR1 × L)
1
s (p1)2 uH11P⊥Au11
1
1− Re2[ρuH12P⊥A u11]P1P2(uH11P⊥A u11)(uH12P⊥A u12)
(E.2)
The relevant inner products will now be evaluated using the circular approximation to the array
manifold. From [21, Eqs. 8.38-9], we have:
uH11P⊥Au11 =(∆s)2 (κ2
1 (p)− 1N
)4
(E.3)
By symmetry, we also have:
uH12P⊥Au12 =(∆s)2 (κ2
1 (p)− 1N
)4
(E.4)
The quantity uH11P⊥Au12 is less straightforward to evaluate. We commence by following the
method of [21, Eq. 8.96]:
41

E. 2-Source CRB (correlated signals) 42
uH11P⊥Au12 = uH11P⊥a1u12 − uH11P⊥a1a2
(aH2 P⊥a1a2
)−1
aH2 P⊥a1u12
= uH11u12 −(uH11a2a
H2 u12 −
1
NuH11a2a
H2 a1a
H1 u12
)[N
N2 − |aH1 a2|2
]
Now, since aH2 u12 = 0, we have:
uH11P⊥Au12 = uH11u12 +
(uH11a2
) (aH2 a1
) (aH1 u12
)N2 − |aH1 a2|
2 (E.5)
All the remaining inner products follow simply from [21, Eqs. 8.96, 8.100 and 8.105] except for
uH11u12. In this case, using [21, Fig. 8.15], we can see that:
uH11u12 = ‖u11‖ ‖u12‖ cos (2∆ψ)
=√
1− sin2 (2∆ψ)
=√
1− 4 sin2 (∆ψ)[1− sin2 (∆ψ)
]=
√1− ‖∆a‖2 κ2
1 (p)
[1− 1
4‖∆a‖2 κ2
1 (p)
]= ±
(1
2‖∆a‖2 κ2
1 (p)− 1
)Note that for ‖∆a‖ = 0, we have uH11u12 = 1. Thus, taking the negative square root:
uH11u12 = 1− 1
2‖∆a‖2 κ2
1 (p)
Substituting this (and all other relevant inner products) back into Equation E.5, we now proceed
with:
uH11P⊥Au12 = 1− 1
2‖∆a‖2 κ2
1 (p)−‖∆a‖2 (1− 1
4‖∆a‖2 κ2
1 (p)) (N − 1
2‖∆a‖2)
N2 −(N − 1
2‖∆a‖2)2
=‖∆a‖2 (κ2
1 (p)− 1N
)‖∆a‖2N− 4
≈ −(∆s)2 (κ2
1 (p)− 1N
)4

E. 2-Source CRB (correlated signals) 43
(where the assumption 4N � ‖∆a‖2 has been used). Therefore, we have:
uH11P⊥Au11 = uH12P⊥Au12 = −uH11P⊥Au12 (E.6)
and, noting that uH11P⊥Au12 is purely real, Equation E.2 becomes:
CRB [p1] =1
2 (SNR1 × L) s (p1)2
4
(∆s)2 (κ21 (p)− 1
N
) 1(1− Re2[ρ]
P1P2
) (E.7)
Similarly, the bound on arc length is:
CRB [s1] =1
2 (SNR1 × L)
4
(∆s)2 (κ21 (p)− 1
N
) 1(1− Re2[ρ]
P1P2
) (E.8)

Appendix F
An Accessible Analysis of Spatial
Smoothing
The conventional spatial smoothing scheme "decorrelates" signals by employing multiple identical
(possibly overlapping) sensor arrays. (In general, these will be overlapping subarrays of an N -
element array whose full aperture can be utilised when signal correlation is low).
We consider two identical sensor subarrays (with arbitrary 3D geometries given by r1 and r2)
which differ only by a spatial displacement, denoted by the real 3-vector d , [dx, dy, dz]T :
r1 = [r1, r2, . . . , rN ]T (F.1)
r2 = r1 + 1NdT (F.2)
For notational convenience, all quantities associated with the shifted array, r2, will be denoted
using ·. According to the standard narrowband plane-wave signal model, the signals observed atthe outputs of r1 and r2 are given by:
x (t) = Sm (t) + n (t) (F.3)
x (t) = Sm (t) + n (t) (F.4)
respectively. Since the noise is considered to be spatially white, the second order statistics of n (t)
and n (t) are the same. Therefore, the effect of the spatial displacement is contained entirely in
the manifold vectors:44

F. An Accessible Analysis of Spatial Smoothing 45
S (θ, φ) , exp(−jr1k (θ, φ)) (F.5)
S (θ, φ) , exp(−j(r1 + 1Nd
T)k (θ, φ))
= S (θ, φ) exp(−jdTk (θ, φ)) (F.6)
Clearly, shifting the phase origin causes all the components of the manifold vector simply to be
rotated by the same angle in complex space. Crucially, this rotation angle varies as a function of
source bearing, (θ, φ). Specifically, the amount of rotation of the manifold at S (θ, φ) is given by
the inner product of d and k (θ, φ). Note that, due to the plane-wave assumption, an origin shift
perpendicular to source direction k (θ0, φ0) will cause no rotation of the manifold at S (θ0, φ0).
Similarly, for two sources with the same φ, changing dz has no relative rotational effect.
For notational convenience, we denote the complex scalar rotation term as ε and the rotation
angle as α:
ε (θ, φ) , exp(−jdTk (θ, φ))
= exp(−jα) (F.7)
F.1 Relating Source Covariance Matrices
The received signal covariance matrices associated with the two arrays are:
Rxx , E{x (t)xH (t)
}= SRmmSH + σ2
nIN (F.8)
Rxx , E{x (t) xH (t)
}= SRmmSH + σ2
nIN (F.9)
We now note that the matrix of source position vectors associated with the shifted array can be
written as:

F. An Accessible Analysis of Spatial Smoothing 46
S = S
ε (θ1, φ1) 0 0 0
0 ε (θ2, φ2) 0 0
0 0. . . 0
0 0 0 ε (θM , φM)
, SE (F.10)
Therefore,
Rxx = S(ERmmEH
)SH + σ2
nIN
Clearly, we can now explore the relationship between the source covariance matrices associated
with the two subarrays, since we have: Rmm =(ERmmEH
). This relationship is crucial to the
success of spatial smoothing and it arises from the special relationship beteen the subarray sensor
location matrices given in Equations F.1-F.2. In other words, spatial smoothing is valid for any
array geometry that comprises subarrays that differ only by a spatial shift. Note that the MIMO
radar virtual array (under the Swerling II target model) described earlier always carries this
property.
As we would expect, the effect of shifting the phase origin is simply to change the phases of
the correlation coeffi cients relating the various signal pairs (since∣∣εiε∗j ∣∣ = 1):
Rmm ,(ERmmEH
)=
1 ε1ε
∗2 · · · ε1ε
∗M
ε2ε∗1 1 · · · ε2ε
∗M
......
. . ....
εMε∗1 εMε
∗2 · · · 1
� Rmm (F.11)
Thus, the correlation coeffi cients associated with the shifted subarray, ρij, can now be expressed
in terms of ρij:
ρij = εiε∗jρij (F.12)
F. An Accessible Analysis of Spatial Smoothing 47
F.2 Effective Source Signal Correlation
It will now be shown that the two covariance matrices, Rxx and Rxx, can be combined in a way thatcancels the effects of signal correlation. We consider the ‘smoothed’covariance matrix, Rsmoothedxx ,
formed by the sum of weighted contributions of Rxx and Rxx. It is easy to prove that the bestdecorrelation effect is observed when equal weights1 of Rxx and Rxx are used:
Rsmoothedxx , 1
2
(Rxx + Rxx
)=
1
2S(Rmm+Rmm
)SH + σ2
nIN (F.13)
Clearly, Rsmoothedxx corresponds to a valid equivalent scenario where the source covariance matrix
is replaced by the ‘effective’source covariance matrix: Reffmm , 12
(Rmm+Rmm
). This means that
the ‘effective’source signal correlations become:
ρeffij =1
2
(ρij + ρij
)=
1
2ρij(1 + εiε
∗j
)(F.14)
F.3 Quantifying the Decorrelating Effect
The extent of decorrelation is described by |ρeffij ||ρij| =
∣∣∣∣ρeffij
ρij
∣∣∣∣ (where ∣∣∣∣ρeffij
ρij
∣∣∣∣ = 0 denotes perfect
decorrelation):
1This assumes that both Rxx and Rxx are unsmoothed covariance matrices (so all correlation terms differ only inphase). As more subarrays are utilised (each with arbitrary spatial shifts and therefore different effective correlationmagnitudes after smoothing), a more detailed analysis may be required in order to optimise decorrelation.

F. An Accessible Analysis of Spatial Smoothing 48
∣∣∣∣∣ρeffij
ρij
∣∣∣∣∣ =
∣∣∣∣12ρij (1 + εiε∗j
)∣∣∣∣=
∣∣∣∣12√(
1 + Re{εiε∗j
})2+ Im
{εiε∗j
}2
∣∣∣∣=
∣∣∣∣12√
(1 + cos (αj − αi))2 + sin2 (αj − αi)∣∣∣∣
=
∣∣∣∣ 1√2
√1 + cos (αj − αi)
∣∣∣∣=
∣∣∣∣cos
(αj − αi
2
)∣∣∣∣ (F.15)
Therefore if |αj − αi| = π, perfect decorrelation is achieved. This is equivalent to spatially shifting
the array in a direction orthogonal to k (θi, φi) until the component parallel to k(θj, φj
)equals
λ2. Clearly, for closely-spaced sources (whose corresponding manifold vectors are almost parallel),
spatial smoothing will tend to be relatively ineffective.
Note that this decorrelation effect is independent of subarray geometry. Since, for a given
overall array geometry, a number of valid subarray geometries can exist, a decision must be made
as to which will offer best overall performance. This will depend jointly on the decorrelation effect
and the subarray geometry’s intrinsic performance bounds.
F.4 Backward Spatial Smoothing
Backward spatial smoothing is valid for a different family of array geometries than forward smooth-
ing. Instead of employing a shifted array, it simply employs the same array in reverse. That is:
r2 = −r1
Therefore, if the sensor locations defined by r1 appear in symmetric pairs about the origin, the
backward array will have identical geometry to the forward array. Thus, their signal/noise sub-
spaces will always be the same and so it is valid to combine their covariance matrices. More

F. An Accessible Analysis of Spatial Smoothing 49
precisely, the backward covariance matrix should be complex conjugated since:
S (θ, φ) , exp(−jr1k (θ, φ)) (F.16)
S (θ, φ) , exp(−jr2k (θ, φ))
= S∗ (θ, φ) (F.17)
and so
Rxx = S∗RmmST + σ2nIN
Conjugating yields:
R∗xx = SR∗mmSH + σ2nIN
Therefore, averaging R∗xx and Rxx is valid and yields the effective source correlation matrix:
Reffmm =1
2(Rmm + R∗mm)
and so effective source correlation ρeffij = 12
(ρij + ρ∗ij
)= Re
{ρij}. In other words, this approach
can eliminate all imaginary components of source correlations (without reducing the aperture of
the array). Note that this backward smoothing effect is independent of all other system parame-
ters.
Clearly, by first shifting a symmetric subarray to the origin, then backward smoothing, a large
variety of forward-backward smoothing operations can be performed for a given array.

References
[1] P. Woodward, Probability and Information Theory with Application to Radar. Artech House,
1953.
[2] H. Krim and M. Viberg, “Two decades of array signal processing research: The parametric
approach,”IEEE Signal Processing Magazine, pp. 67—94, 1996.
[3] D. Bliss and K. Forsythe, “Multiple-input multiple-output (mimo) radar and imaging: De-
grees of freedom and resolution,”Proc. 37th Asilomar Conf. Signals, Syst. Comput., vol. 1,
pp. 54—59, 2003.
[4] J. Li, P. Stoica, L. Xu, and W. Roberts, “On parameter identifiability of mimo radar,”IEEE
Signal Process. Lett., vol. 14, pp. 958—971, 2007.
[5] A. Haimovich, R. Blum, and L. Cimini, “Mimo radar with widely separated antennas,”IEEE
Signal Process. Mag., vol. 25, pp. 116—129, 2008.
[6] E. Fishler, A. Haimovich, R. Blum, D. Chizhik, L. Cimini, and R. Valenzuela, “Mimo radar:
An idea whose time has come,”Proc. IEEE Radar Conf., pp. 71—78, 2004.
[7] J. Li and P. Stoica, “Mimo radar with colocated antennas: Review of some recent work,”
IEEE Signal Process. Mag., vol. 24, pp. 106—114, 2007.
[8] N. Lehmann, E. Fishler, A. Haimovich, R. Blum, D. Chizhik, L. Cimini, and R. Valen-
zuela, “Evaluation of transmit diversity in mimo-radar direction finding,”IEEE Trans. Signal
Processing, vol. 55, pp. 2215—2225, 2007.
[9] M. Jin, G. Liao, and J. Li, “Correlation analysis of target echoes using distributed transmit
array,”Sci China Inf Sci, vol. 53, pp. 1860—1868, 2010.50

REFERENCES 51
[10] M. Bartlett, “A note on the multiplying factors for various chi squared approximations.,”J.
R. Stat. Soc., vol. 16, pp. 296—298, 1954.
[11] J. Capon, “High-resolution frequency-wavenumber spectrum analysis,”Proc. IEEE, vol. 57,
pp. 1408—1418, 1969.
[12] J. Li and P. Stoica, Robust Adaptive Beamforming. Wiley, 2006.
[13] R. O. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans.
Antennas Propagation, vol. 34, pp. 276—280, 1986.
[14] R. Kumaresan and D. W. Tufts, “Estimating the angles of arrival of multiple plane waves,”
IEEE Trans. Aerosp. Electron. Syst., vol. 19, 1983.
[15] H. L. V. Trees, Optimum Array Processing: Detection, Estimation and Modulation Theory,
Part IV. Wiley, 2002.
[16] N. Sidiropoulos, G. Giannakis, and R. Bro, “Parallel factor analysis in sensor array process-
ing,”IEEE Trans. Signal Processing, vol. 48, pp. 2377—2388, 2000.
[17] R. Roy and T. Kailath, “Esprit - estimation of signal parameters via rotational invariance
technique,”IEEE Trans. on ASSP, vol. 37, pp. 984—995, 1989.
[18] L. Godara, “Limitations and capabilities of directions of arrival estimation techniques using
an array of antennas: A mobile communications perspective,”Proc. IEEE, pp. 327—333, 1996.
[19] I. Bekkerman and J. Tabrikian, “Target detection and localization using mimo radars and
sonars,”IEEE Trans. Signal Processing, vol. 54, pp. 3873—3883, 2006.
[20] C.-Y. Chen, Signal Processing Algorithms for MIMO Radar. PhD thesis, California Institute
of Technology, 2009.
[21] A. Manikas, Differential Geometry in Array Processing. Imperial College Press, 2004.
[22] H. R. Karimi and A. Manikas, “Cone-angle parametrization of the array manifold in df
systems,”J. Franklin Inst. (Eng. Appl. Math.), vol. 335B, pp. 375—394, 1998.

REFERENCES 52
[23] A. Manikas, A. Alexiou, and H. Karimi, “Comparison of the ultimate direction-finding capa-
bilities of a number of planar array geometries,” IEE Proc. Radar, Sonar, Navig., vol. 144,
pp. pp. 321—329, 1997.
[24] P. Stoica and A. Nehorai, “Performance study of conditional and unconditional direction-
of-arrival estimation,” IEEE Trans. Acoust., Speech and Signal Process., vol. 38, no. 10,
pp. 1783—1795, 1990.
[25] A. Matveyev, A. Gershman, and J. Böhme, “On the direction estimation cramer-rao bounds
in the presence of uncorrelated unknown noise,”Circuits, Systems, Signal Processing, vol. 18,
no. 5, pp. 479—487, 1999.
[26] P. Stoica and A. Nehorai, “Music, maximum likelihood and cramer-rao bound,”IEEE Trans.
ASSP, vol. 37, pp. 720—741, 1989.
[27] S. F. Yau and Y. Bresler, “A compact cramer-rao bound expression for parametric estimation
of superimposed signals,”IEEE Trans. Signal Processing, vol. 40, pp. 1226—1229, 1992.
[28] S. Haykin, ed., Advances in Spectrum Analysis and Array Processing, Vol. III. Prentice-Hall,
1994.
[29] A. Alexiou, Bounds in Array Processing. PhD thesis, Imperial College London, 1999.
[30] H. Lee and M. Wengrovitz, “Resolution threshold of beamspace music for two closely spaced
emitters,”IEEE Trans. Acoustics Speech Signal Process., vol. 38, p. 1545U1559, 1990.
[31] T. J. Shan, M. Wax, and T. Kailath, “On spatial smoothing for direction of arrival estimation
of coherent signals,”IEEE Trans. Acoust. Speech Sig. Proc., vol. 33, pp. 806—811, 1985.
[32] U. Pillai and B. Kwon, “Performance analysis of music-type high resolution estimators for
direction finding in correlated and coherent scenes,” IEEE Trans. ASSP, vol. 37, pp. 1176—
1189, 1989.
[33] M. Kaveh and A. Barabell, “The statistical performance of the music and minimum-norm
algorithms in resolving plane waves in noise,” IEEE Trans. Acoust. Speech Signal Process.,
vol. 34, pp. 331—341, 1986.

REFERENCES 53
[34] P. Forster and E. Villier, “Simplified formulas for performance analysis of music and min
norm,”in OCEANS98, Nice, France, 1998.
[35] P. Tichavsky, “Estimating the angles of arrival of multiple plane waves: The statistical
performance of the music and the minimum norm algorithm,”Kybernetika, vol. 24, pp. 196—
206, 1988.
[36] J. Luo and Z. Bao, “The resolution performance of eigenstructure approach,” [Chinese]
Journal of Electronics, vol. 13, 1991.