dense image matching - challenges and potentials (keynote 3d-arch 2015)
TRANSCRIPT
Dense Image Matching
Challenges and Potentials
Konrad Wenzel
6th 3D-Arch Workshop, 25th of February 2015, Avila, Spain

Eiger, 20cm GSD

Eiger, 20cm GSD

Eiger, 20cm GSD
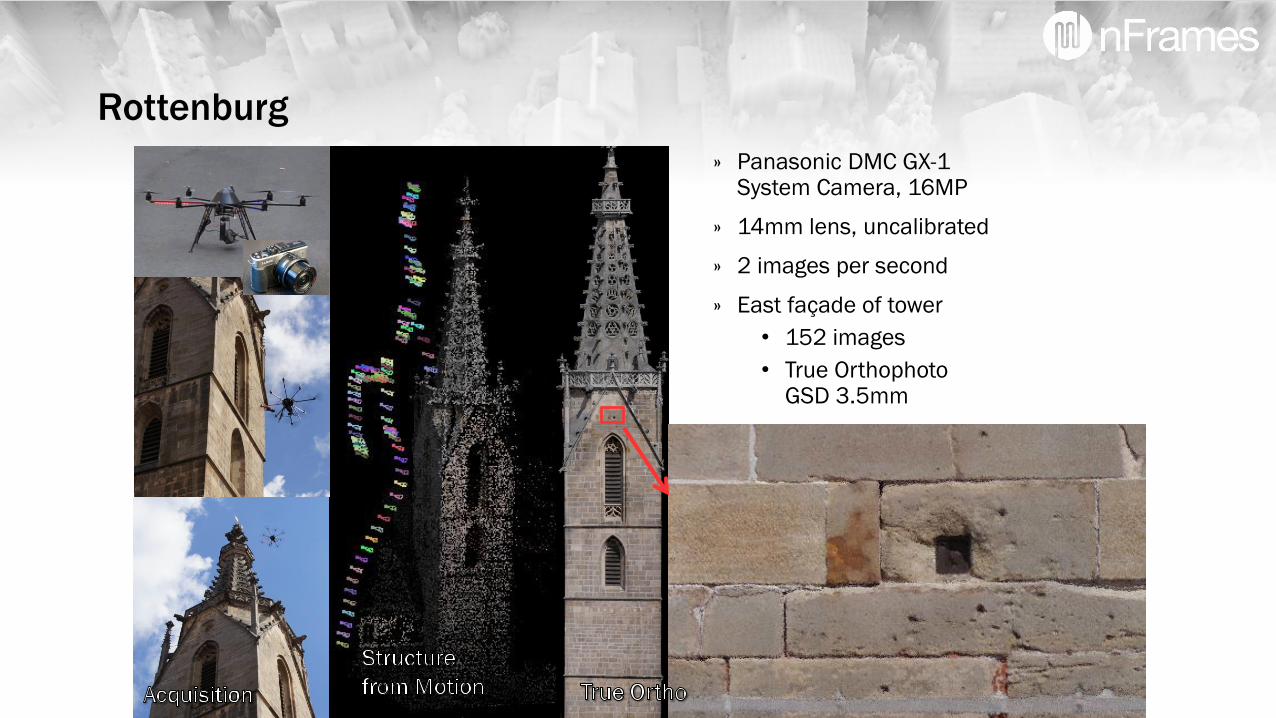
Rottenburg
» Panasonic DMC GX-1System Camera, 16MP
» 14mm lens, uncalibrated
» 2 images per second
» East façade of tower
• 152 images
• True OrthophotoGSD 3.5mm
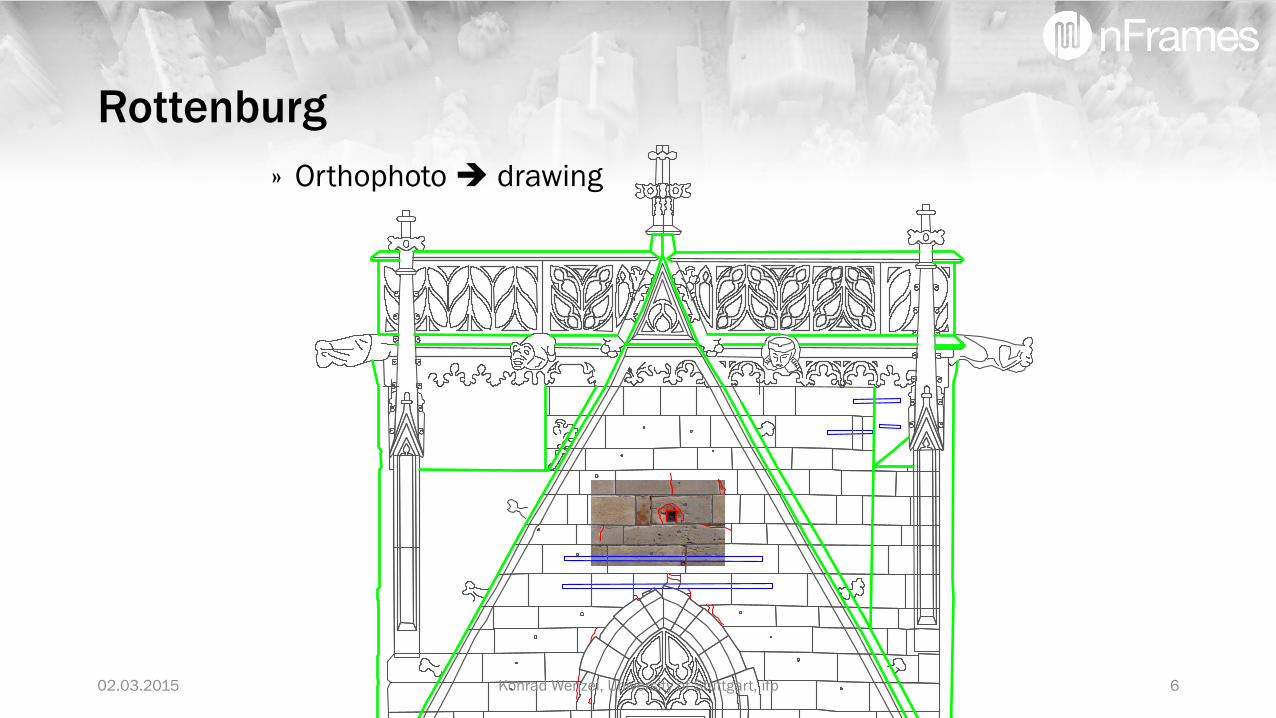
Rottenburg
» Orthophoto drawing
02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 6

Gyrocopter & IGI DigiCAM
» IGI DigiCAM 50MP
» 131 images, GSD 6cm
7

02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 8

02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 9

Carved stone from the Temple of Heliopolis, Egypt
» 30 images (12MP), Nikon D2X02.03.2015 10
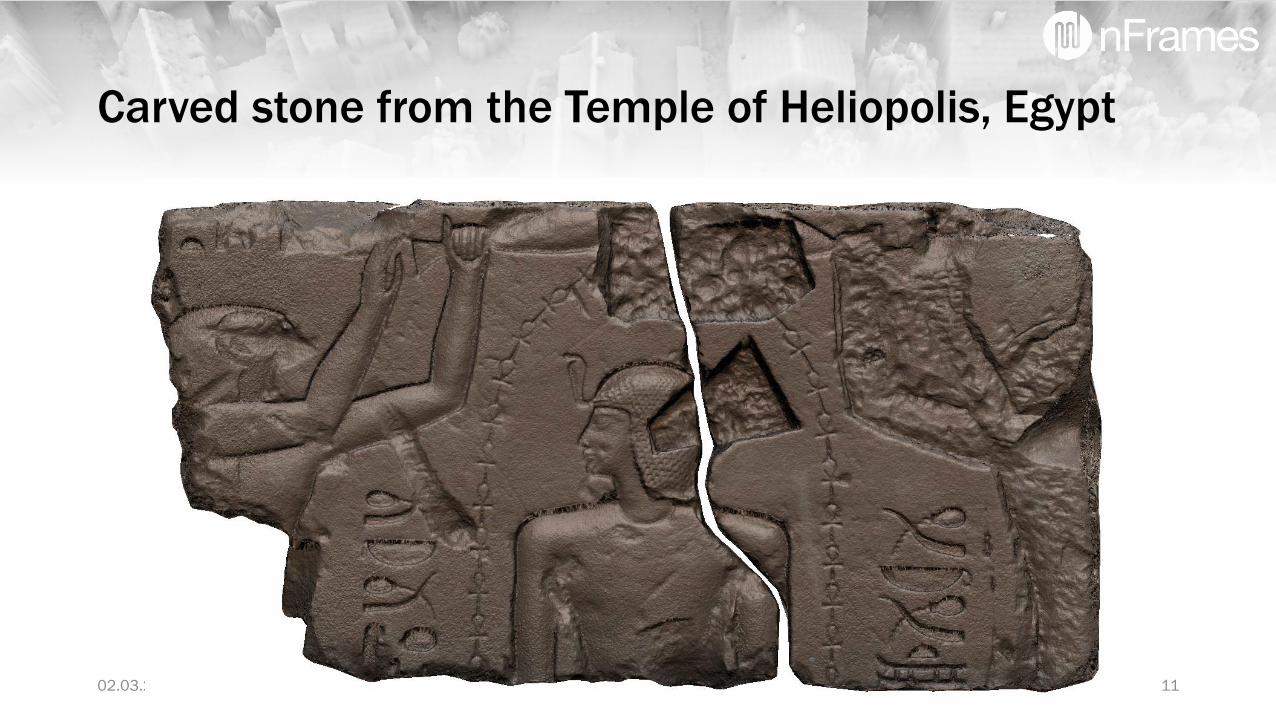
Carved stone from the Temple of Heliopolis, Egypt
02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 11
Carved stone from the Temple of Heliopolis, Egypt
Konrad Wenzel, University of Stuttgart, ifp» 0.5mm GSD

GlacierResult from a single DMC II stereo pair
02.03.2015 13
Glacier, DMCII Stereo Pair

GlacierResult from a single DMC II stereo pair
02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 14
Glacier, DMCII Stereo Pair

Trento, 10cm GSD, 80/60
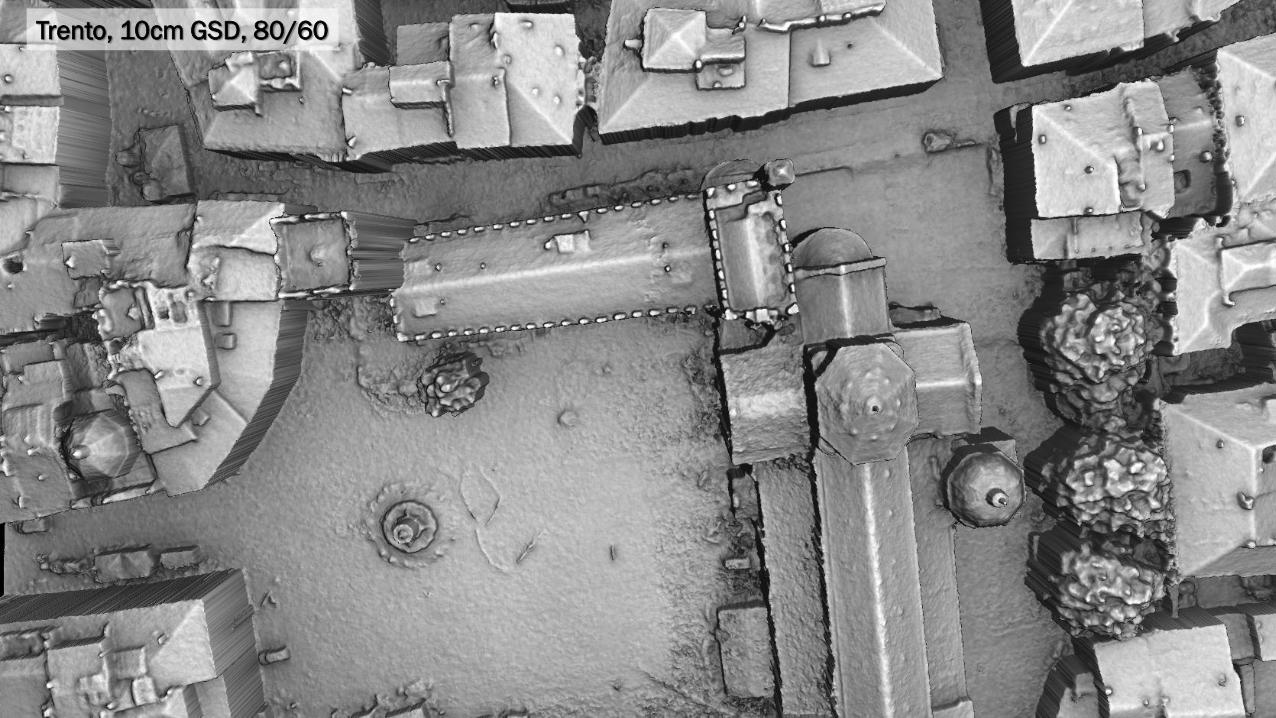
Trento, 10cm GSD, 80/60

Trento, 10cm GSD, 80/60

Trento, 10cm GSD, 80/60

Stuttgart, 5cm GSD, DMCII, 80/60, 2 strips




True Ortho

Purpose & Motivation
» Integration of groups of aligned range images
• Range image: each pixel contains depth
• Depth cameras (TOF, Structured light)
• Dense image matching (e.g. SGM)
• Polar & triangulating Laserscanners
Extraction of consistent , optimal surface models
24

Perth, 5cm GSD

Perth, 5cm GSD, 80/70 ov.

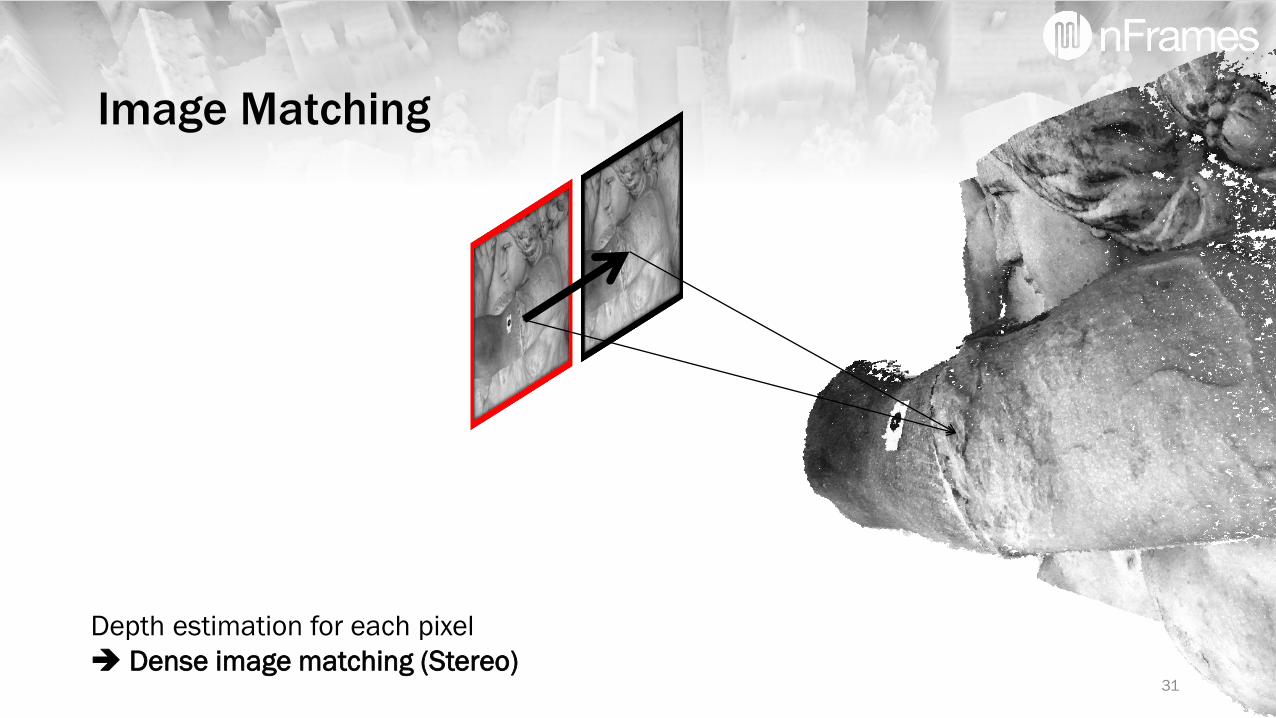
Image MatchingPixel correspondence search for depth estimation
Dense image matching – one 3D sample for each pixel

28
Image Matching
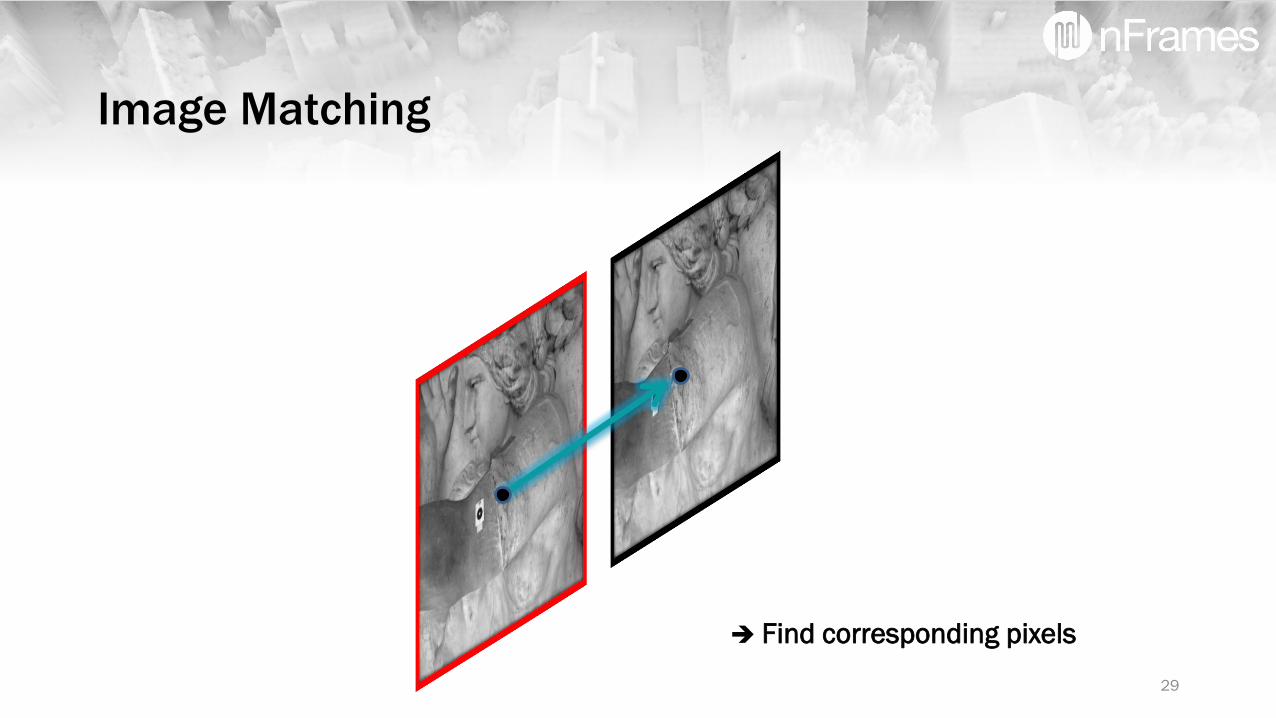
Find corresponding pixels
29
Image Matching
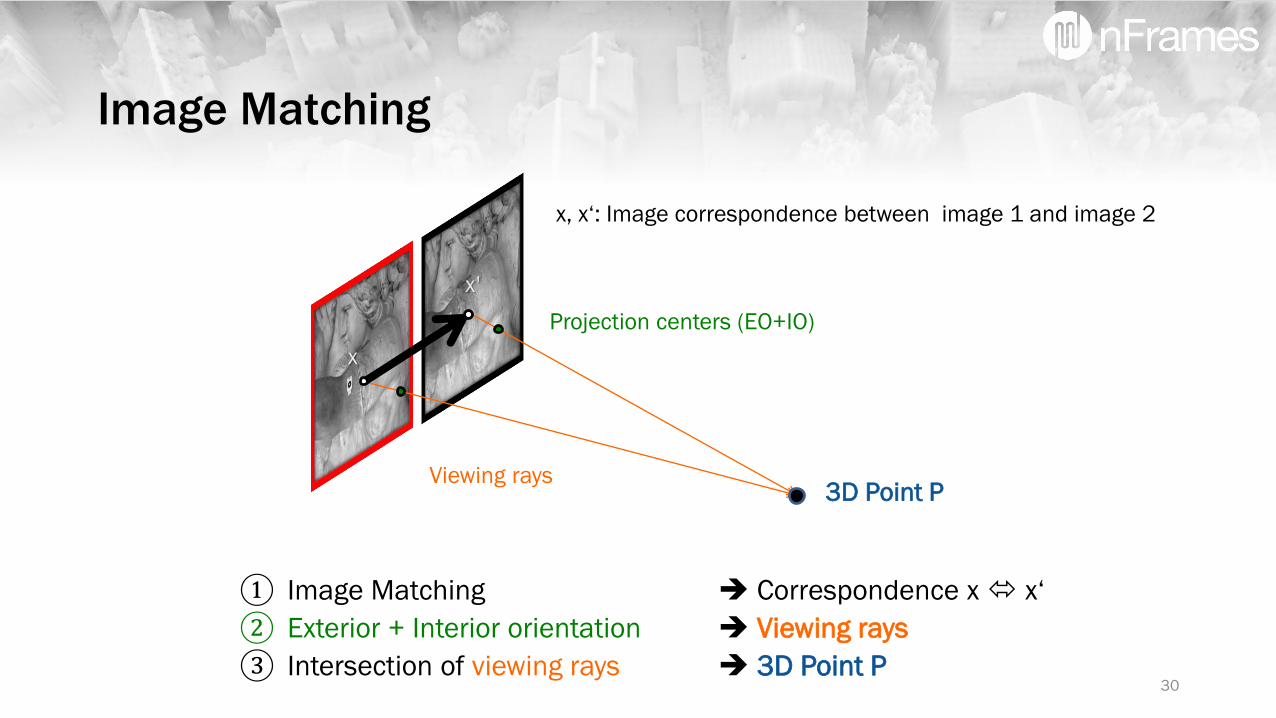
3D Point P
x, x‘: Image correspondence between image 1 and image 2
Projection centers (EO+IO)
Viewing rays
① Image Matching Correspondence x x‘
② Exterior + Interior orientation Viewing rays
③ Intersection of viewing rays 3D Point P30
Image Matching
31
Image Matching
Depth estimation for each pixel
Dense image matching (Stereo)
32
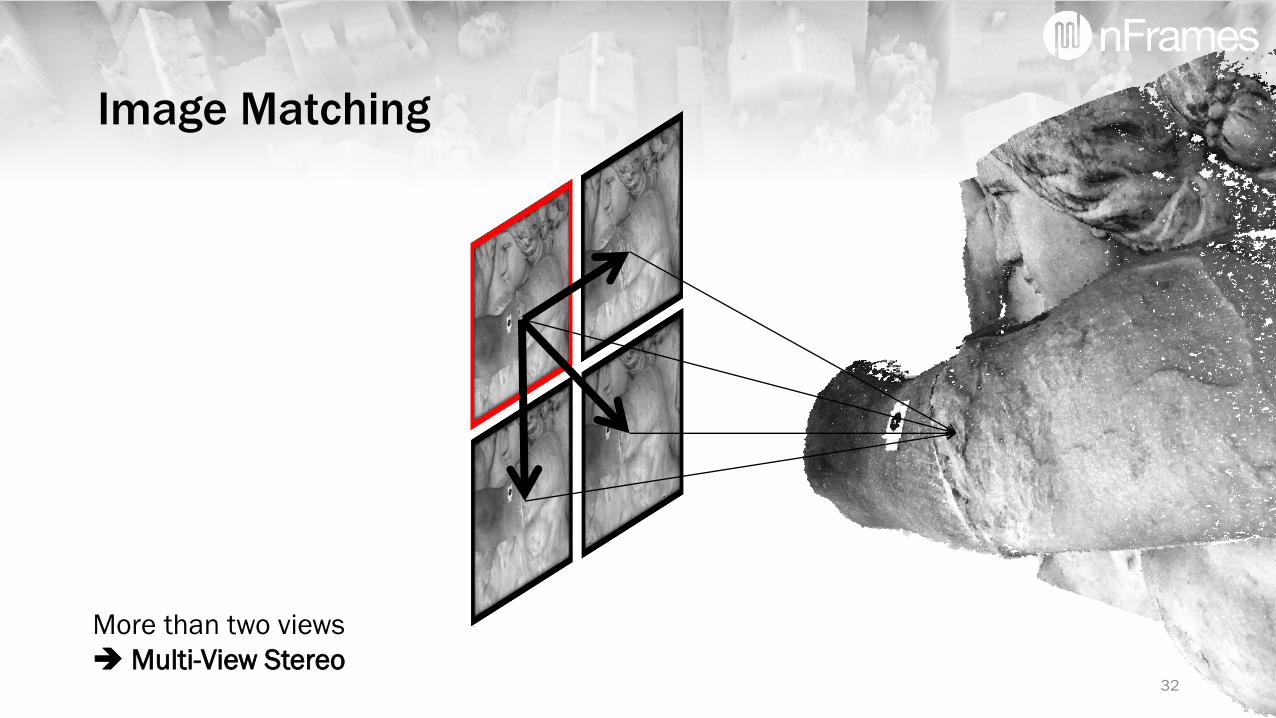
Image Matching
More than two views
Multi-View Stereo

Challenges
» Ambiguities• Repetition of grey values
» Noise and weak texture• Shadows
» Discontinuities• Edges and details
» Computational complexity• Suitability for production

Matching for one image pair
Stereo
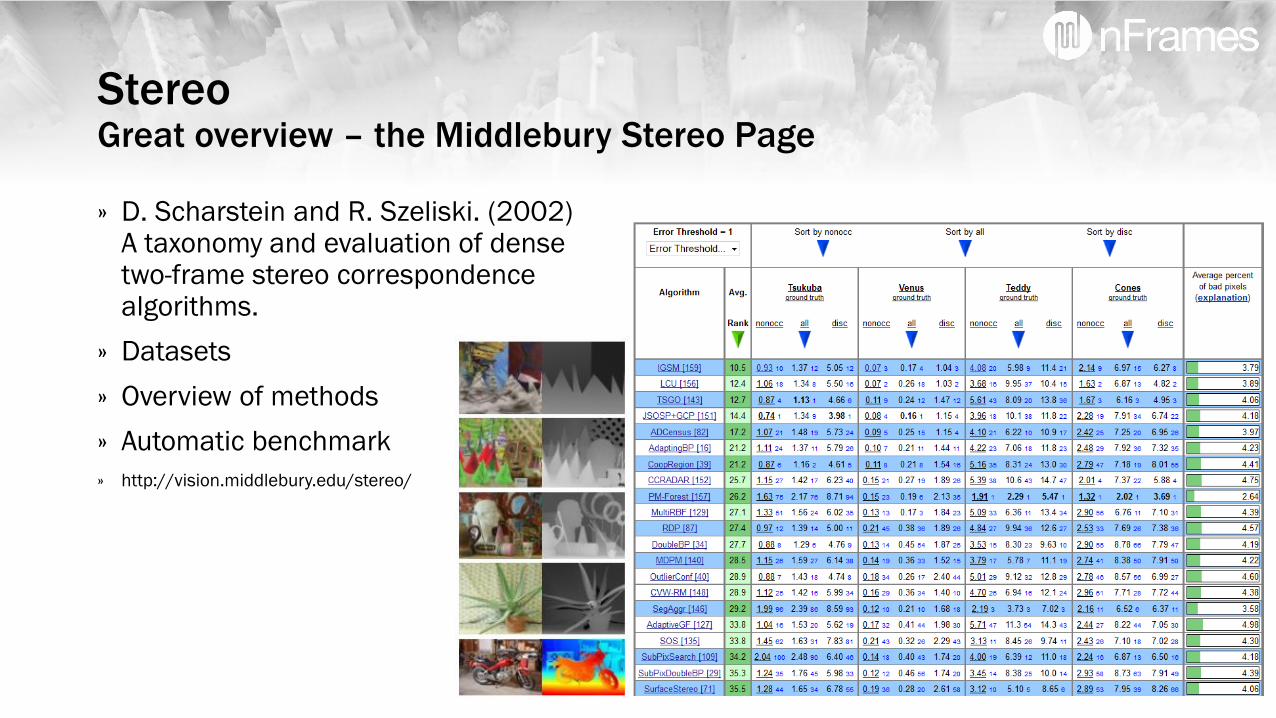
StereoGreat overview – the Middlebury Stereo Page
» D. Scharstein and R. Szeliski. (2002) A taxonomy and evaluation of dense two-frame stereo correspondence algorithms.
» Datasets
» Overview of methods
» Automatic benchmark
» http://vision.middlebury.edu/stereo/
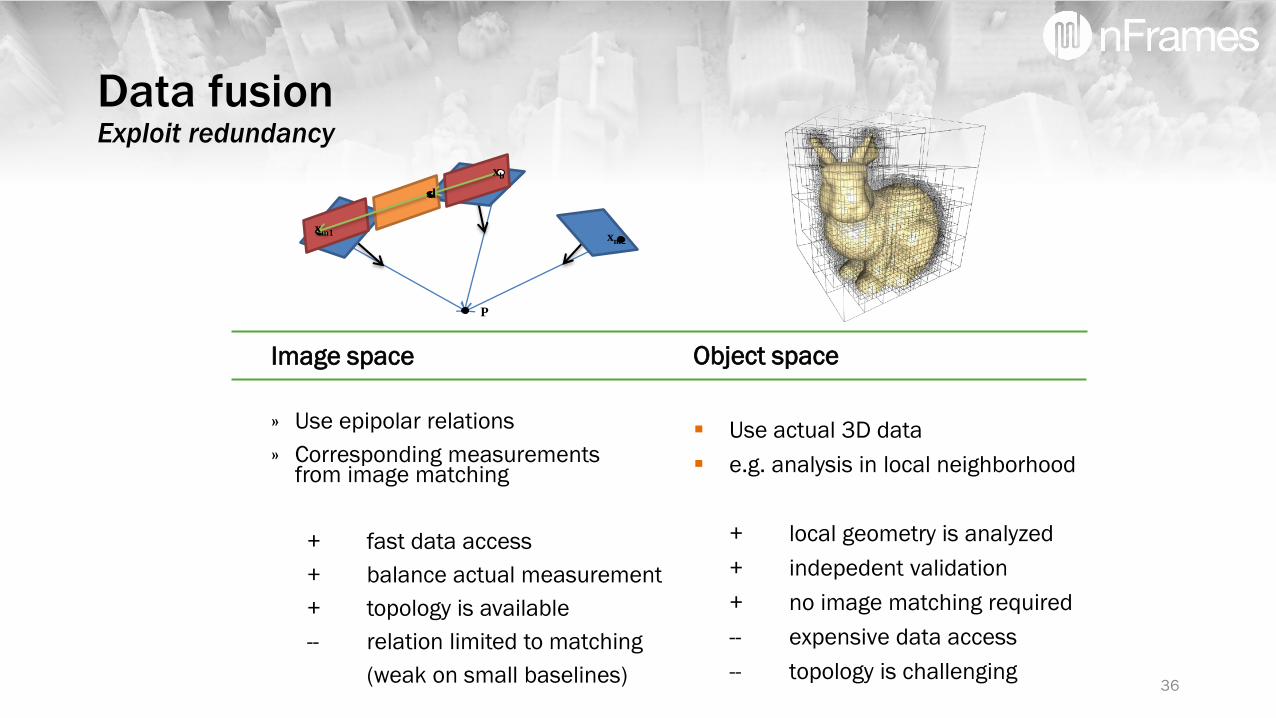
Data fusionExploit redundancy
Image space
» Use epipolar relations
» Corresponding measurementsfrom image matching
+ fast data access
+ balance actual measurement
+ topology is available
-- relation limited to matching
(weak on small baselines)36
Object space
Use actual 3D data
e.g. analysis in local neighborhood
+ local geometry is analyzed
+ indepedent validation
+ no image matching required
-- expensive data access
-- topology is challenging
P
xb
xm1 xm2
d
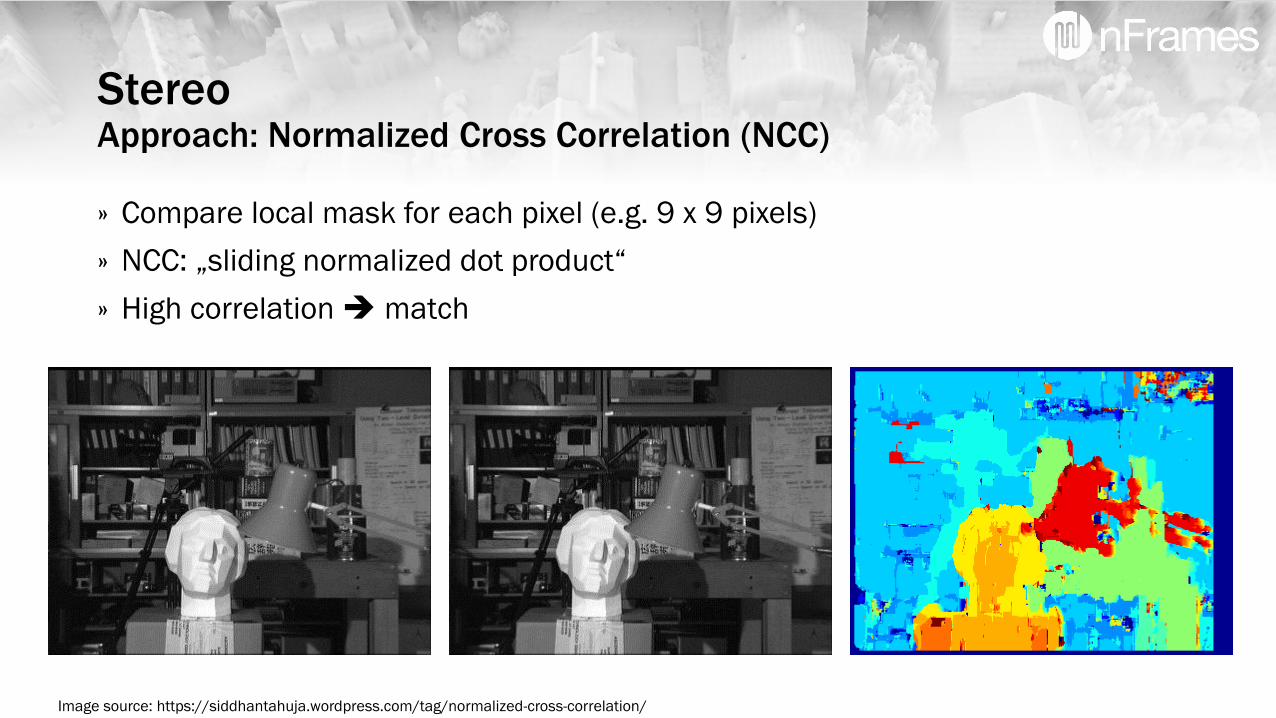
Stereo Approach: Normalized Cross Correlation (NCC)
» Compare local mask for each pixel (e.g. 9 x 9 pixels)
» NCC: „sliding normalized dot product“
» High correlation match
Image source: https://siddhantahuja.wordpress.com/tag/normalized-cross-correlation/
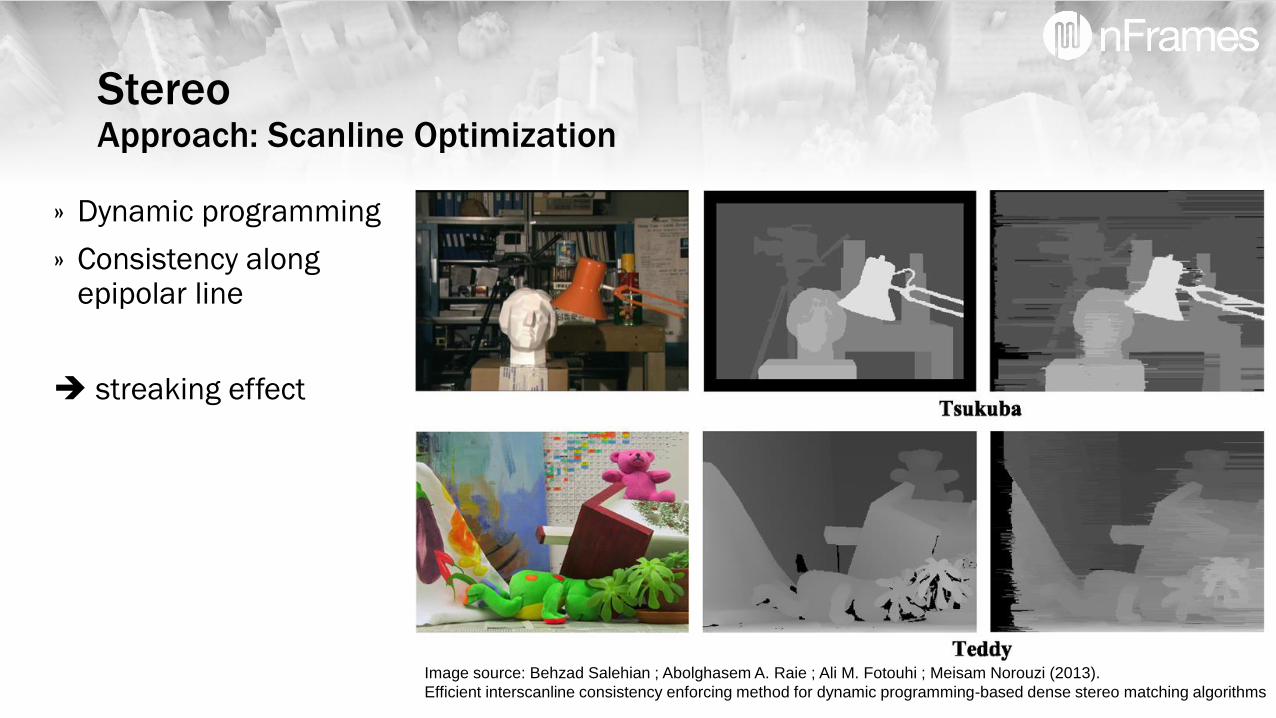
StereoApproach: Scanline Optimization
» Dynamic programming
» Consistency alongepipolar line
streaking effect
Image source: Behzad Salehian ; Abolghasem A. Raie ; Ali M. Fotouhi ; Meisam Norouzi (2013).
Efficient interscanline consistency enforcing method for dynamic programming-based dense stereo matching algorithms

StereoApproach: Belief Propagation
» Message passing algorithm
» Usable for global optimization
» Popular:
• Bayesian networks
• Markov random fields
» Similar: graph cuts
Exact minimum solution
Computationally rather expensive
Image source: Klaus, A., Sormann, M., & Karner, K. (2006, August).
Segment-based stereo matching using belief propagation and a self-adapting
dissimilarity measure. In Pattern Recognition, 2006. ICPR 2006.

StereoApproach: Semi-Global Matching
• Matching: dense, intensity-based
• Global: optimization approach using a global model
• Semi: approximation fast numerical solution
Castle Neuschwanstein, Bavaria, Germany source: Hirschmüller, Heiko (2005) – Accurate and efficient stereo processing by Semi Global Matching an Mutual Information
Intensity image Disparity image using a
correlation matching method
Disparity image using
Semi Global Matching

StereoApproach: Semi-Global Matching
» SGM Optimization approach: disparities similar to neighboring pixels are preferred
Assignment of costs for each possible disparity on each pixel
• Costs for the similarity of the grey value ( similar low costs )
• Additional costs for disparity jumps forces smooth surfaces41
Disparity along a path L in the image
02.03.2015

StereoApproach: Semi-Global Matching
» Recursive cost aggregation on paths through the image
Base image, pixel
pi
Match image, pixel qi,j
Minimal costs
Costs c(pi ,qi,j)

• Problem: SGM cost structures require large amount of memory
• Solution:
• Reduce disparity search ranges to a tube around actual surface
• Coarse-to-fine approach: Initialize search ranges /tubes using low resolution imagery
Fast
Low memory requirements
x [pix]
dis
pa
rity
[pix]
x [pix]
dis
pa
rity [pix]
Rothermel, M., Wenzel, K., Fritsch, D., Haala, N. (2012).
SURE: Photogrammetric Surface Reconstruction from Imagery.
StereoApproach: Semi-Global Matching – tSGM variation
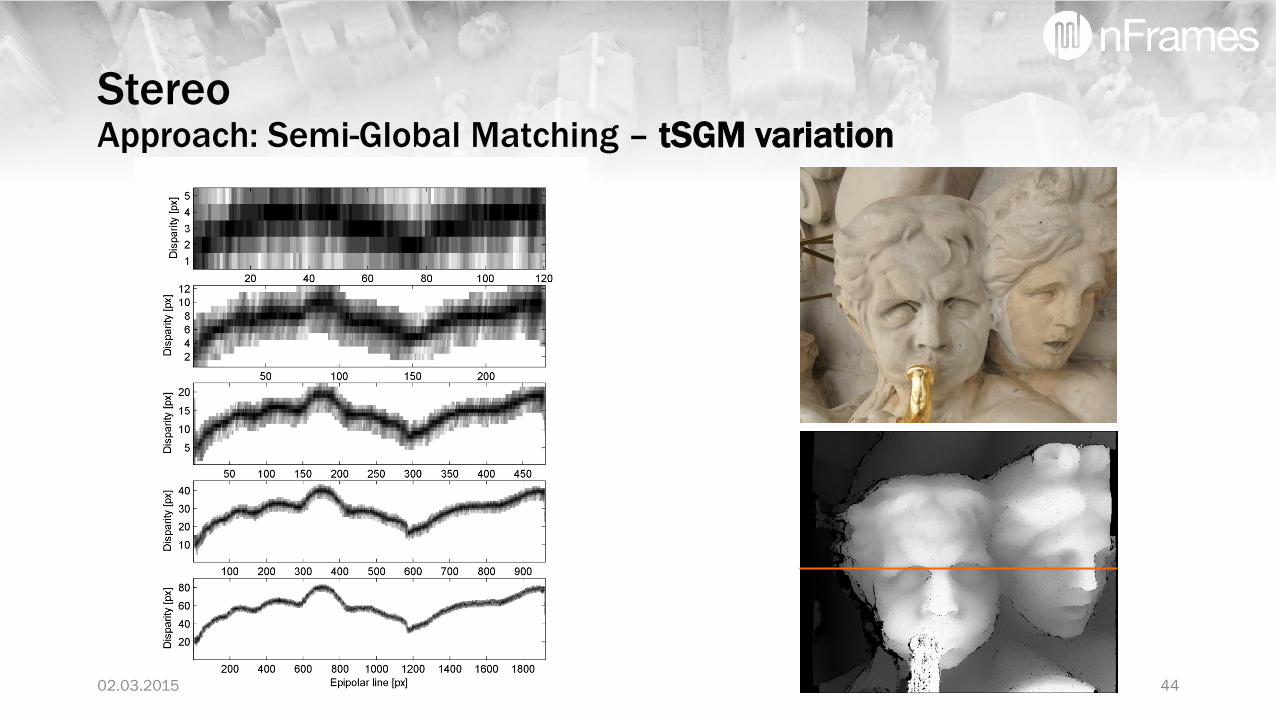
4402.03.2015
StereoApproach: Semi-Global Matching – tSGM variation

Multi-View Stereo
Matching on multiple views

» Steve Seitz, Brian Curless, James Diebel, Daniel Scharstein, Richard SzeliskiA Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms, CVPR 2006, vol. 1, pages 519-526.
» http://vision.middlebury.edu/mview/
StereoGreat overview – the Middlebury Multi-View Stereo Page

» Yasutaka Furukawa and Jean Ponce, Accurate, Dense, and Robust Multi-ViewStereopsis, CVPR 2007
» Steps:
• Match: find features
• Expand: grow patches
• Filter: using visibility constraint
» Mesh using regulation constraints
» Available Open Source as PMVS
Multi-View StereoApproach: Grow patches around feature points

» Deseilligny, M. P., & Clery, I. (2011). Apero, an open source bundle adjusmentsoftware for automatic calibration and orientation of set of images. 3D Arch 2011
» Multi-Stereo matching for one reference image (available as Open Source: MICMAC)
» Graph cut & dynamic programming optimization
Multi-View StereoApproach: Multi-stereo matching

Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration
» M. Goesele, N. Snavely, B. Curless, H. Hoppe, S. Seitz (2007). Multi-view stereo for community photo collections, ICCV 2007
» Grow sparse points from SfM
» Estimate refined depth maps withphotoconsistent normals
» Integration using Volumetric Range Image Integration
Brian Curless and Marc Levoy, Stanford University (1996): A Volumetric Method for Building Complex Models from Range Images.
http://grail.cs.washington.edu/software-data/vrip/

50
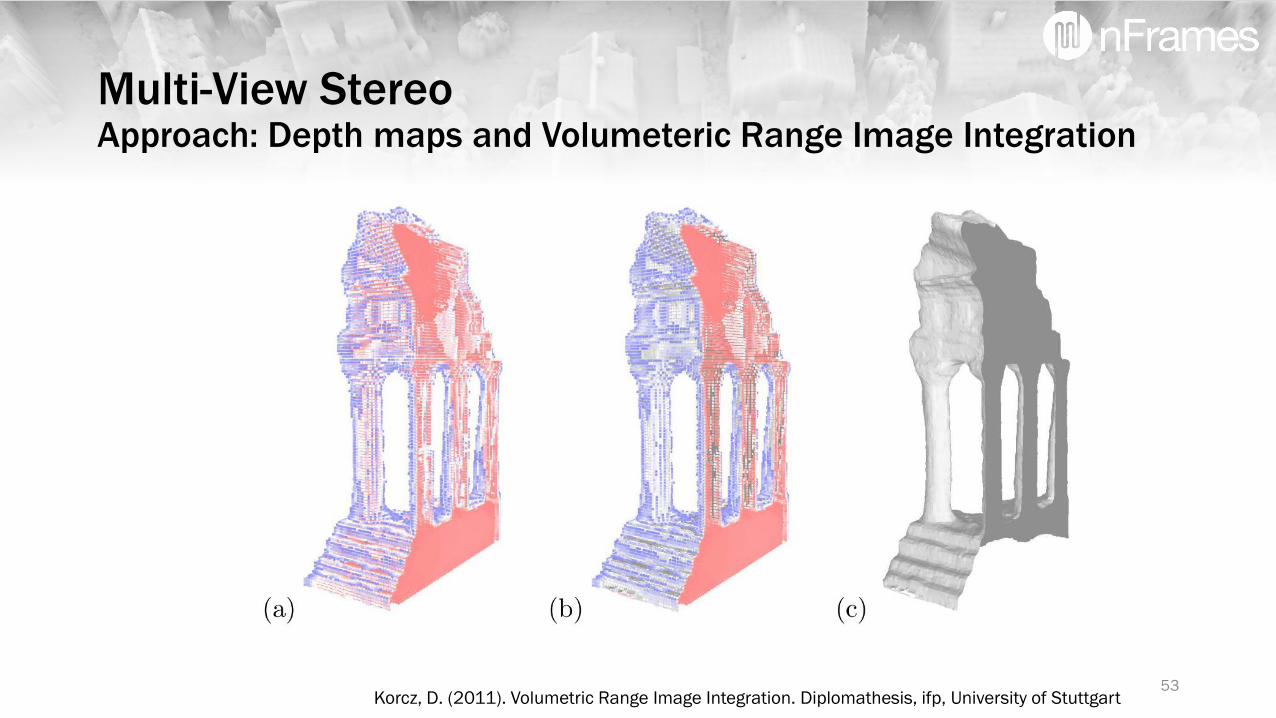
Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration
Korcz, D. (2011). Volumetric Range Image Integration. Diplomathesis, ifp, University of StuttgartDataset: Middlebury Multi-View Stereo
evaluation, Temple

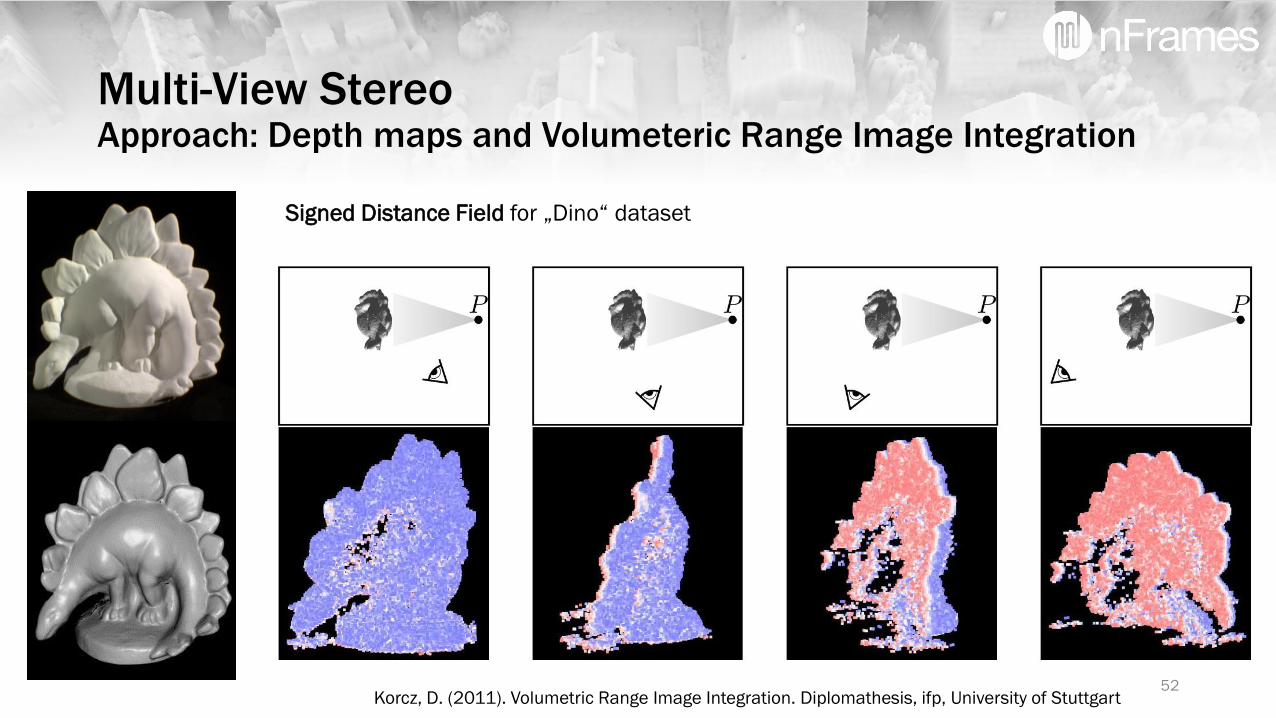
1. Build volumetric space
entity: voxel, a volumetric pixel
2. Project range image into voxel space
3. Compute Signed Distance Field
4. Extract optimal surface
51Korcz, D. (2011). Volumetric Range Image Integration. Diplomathesis, ifp, University of Stuttgart
Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration
52Korcz, D. (2011). Volumetric Range Image Integration. Diplomathesis, ifp, University of Stuttgart
Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration
Signed Distance Field for „Dino“ dataset
53Korcz, D. (2011). Volumetric Range Image Integration. Diplomathesis, ifp, University of Stuttgart
Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration

» Iso-Surface extraction using Marching Cubes algorithm
» Hole filling by space carving method
54
Multi-View StereoApproach: Depth maps and Volumeteric Range Image Integration
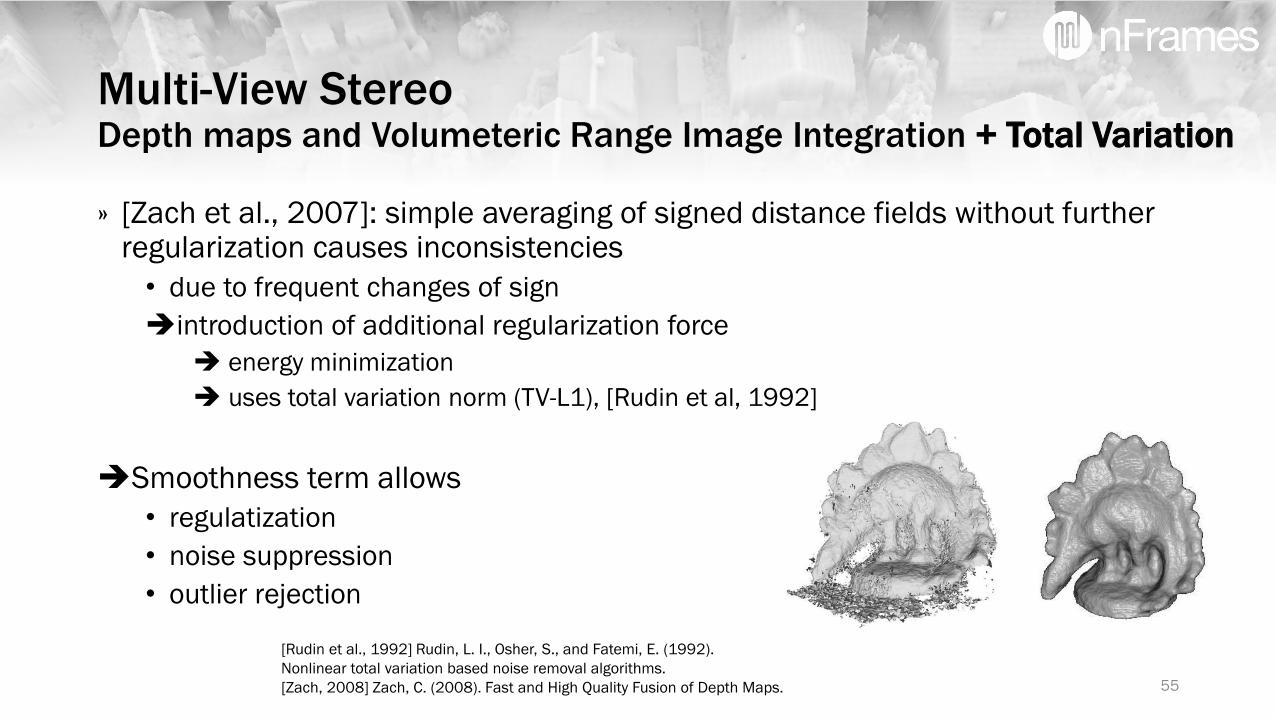
» [Zach et al., 2007]: simple averaging of signed distance fields without furtherregularization causes inconsistencies
• due to frequent changes of sign
introduction of additional regularization force
energy minimization
uses total variation norm (TV-L1), [Rudin et al, 1992]
Smoothness term allows
• regulatization
• noise suppression
• outlier rejection
55
[Rudin et al., 1992] Rudin, L. I., Osher, S., and Fatemi, E. (1992).
Nonlinear total variation based noise removal algorithms.
[Zach, 2008] Zach, C. (2008). Fast and High Quality Fusion of Depth Maps.
Multi-View StereoDepth maps and Volumeteric Range Image Integration + Total Variation

56
Multi-View StereoDepth maps and Volumeteric Range Image Integration + Total Variation
Source: Korcz, D. (2011). Volumetric Range Image Integration.

» Vu, H.; Keriven, R.; Labatut, P. and Pons, J.-P (2009). Towards high-resolution large-scale multi-view stereo. CVPR, 2009
» Rough dense point cloud through normalized cross correlation (NCC)
» minimum s-t cut global optimization with visibility filtering
» Mesh refinement with photo consistency
Multi-View StereoApproach: rough point cloud and mesh refinement
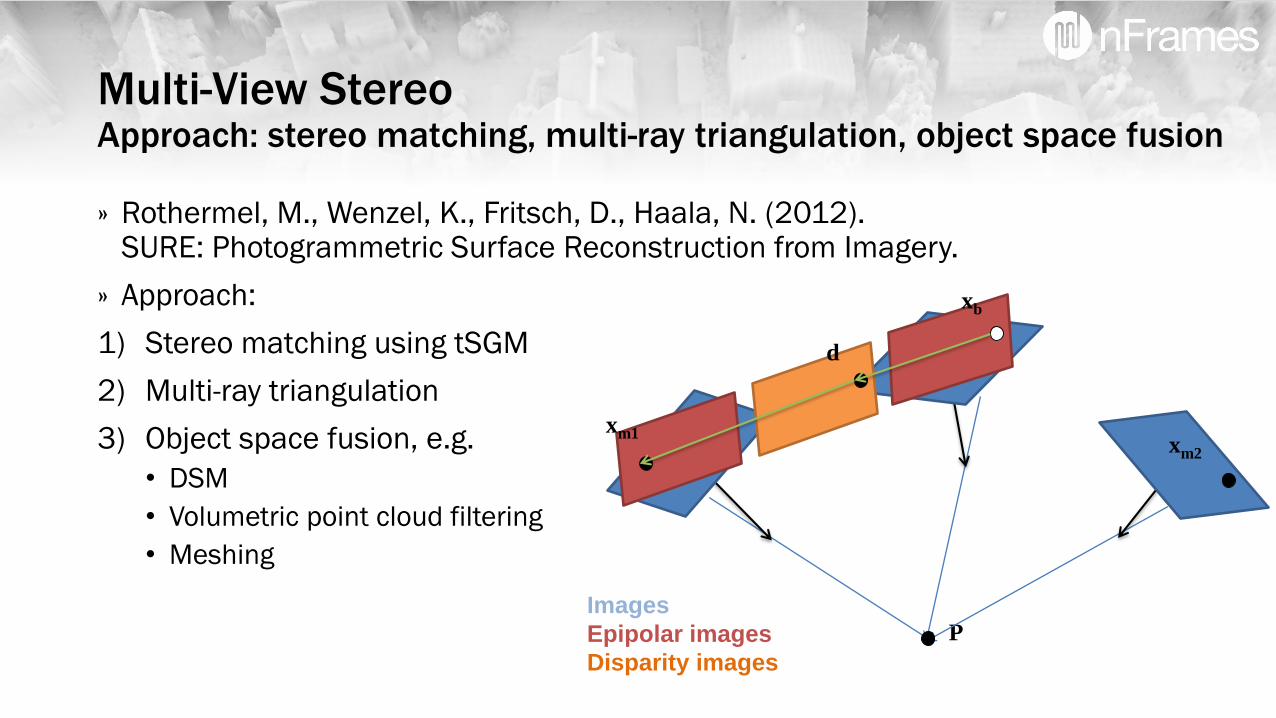
» Rothermel, M., Wenzel, K., Fritsch, D., Haala, N. (2012). SURE: Photogrammetric Surface Reconstruction from Imagery.
» Approach:
1) Stereo matching using tSGM
2) Multi-ray triangulation
3) Object space fusion, e.g.
• DSM
• Volumetric point cloud filtering
• Meshing
Multi-View StereoApproach: stereo matching, multi-ray triangulation, object space fusion
P
xb
xm1xm2
d
Images
Epipolar images
Disparity images

SURE: Multi-View Stereo Triangulation
» Redundant measurements across stereo pairsallow outlier elimination claiming geometric consistency
Stereo Multi-view Multi-view Multi-view
> 1-fold > 2-fold > 3-fold1-fold
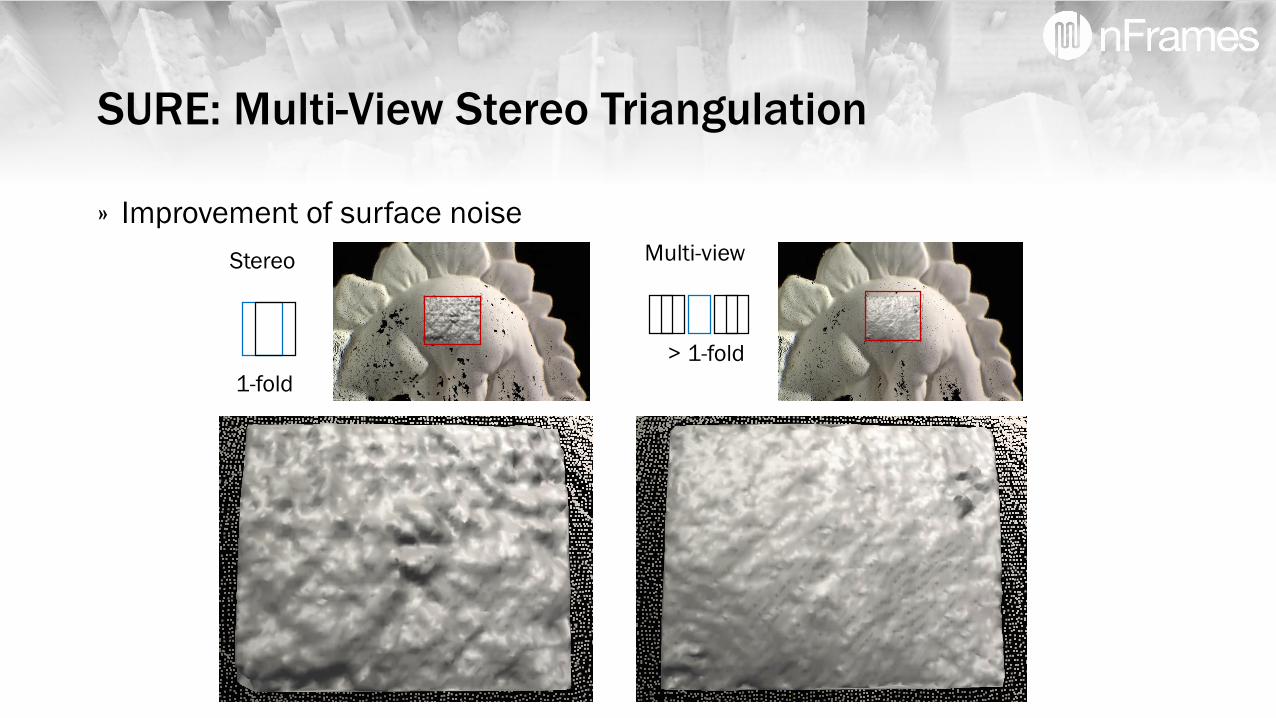
SURE: Multi-View Stereo Triangulation
» Improvement of surface noise
Stereo
1-fold
Multi-view
> 1-fold

SURE: Point Cloud Fusion for 2.5D Surfaces
» Fusion of 3D point clouds to 2.5D surface models
3D point cloud stereo
matching
3D point clouds multi-view
stereo matching
Fusion of point clouds to
2.5D surface model

Munich – DMCII, 10cm GSD [EuroSDR Matching Test]

Munich – DMCII, 10cm GSD [EuroSDR Matching Test]
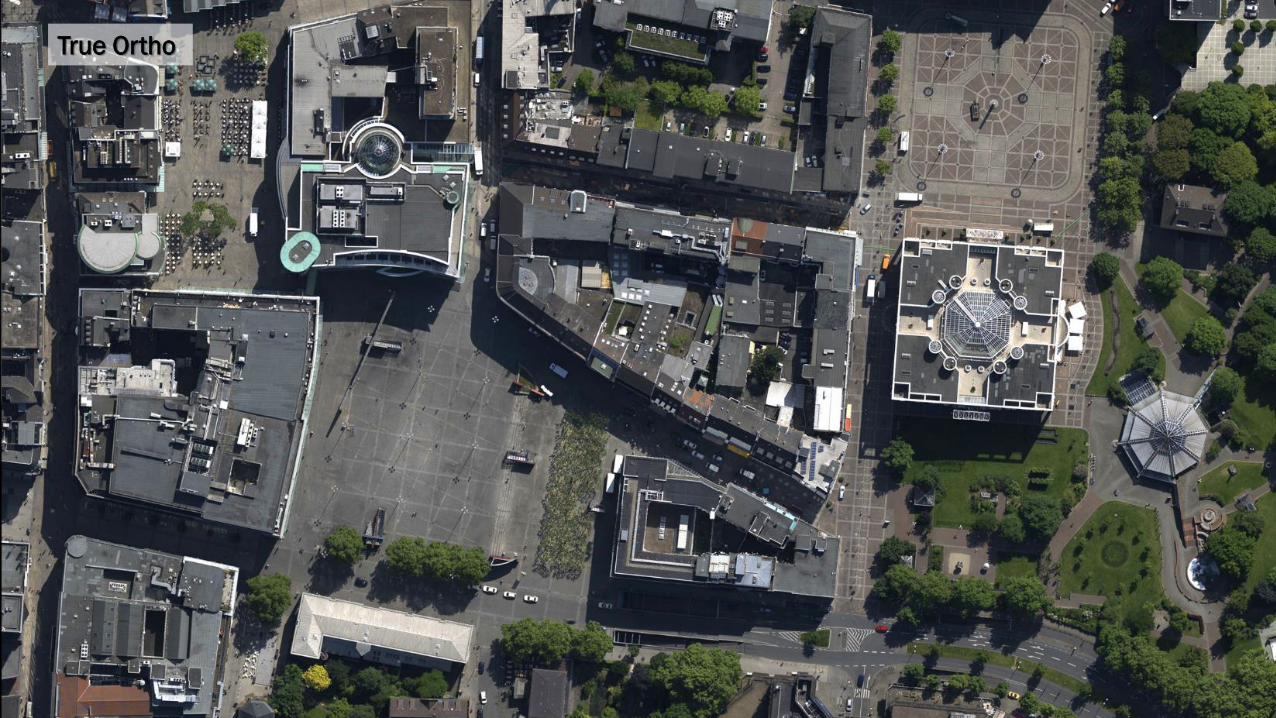
True Ortho
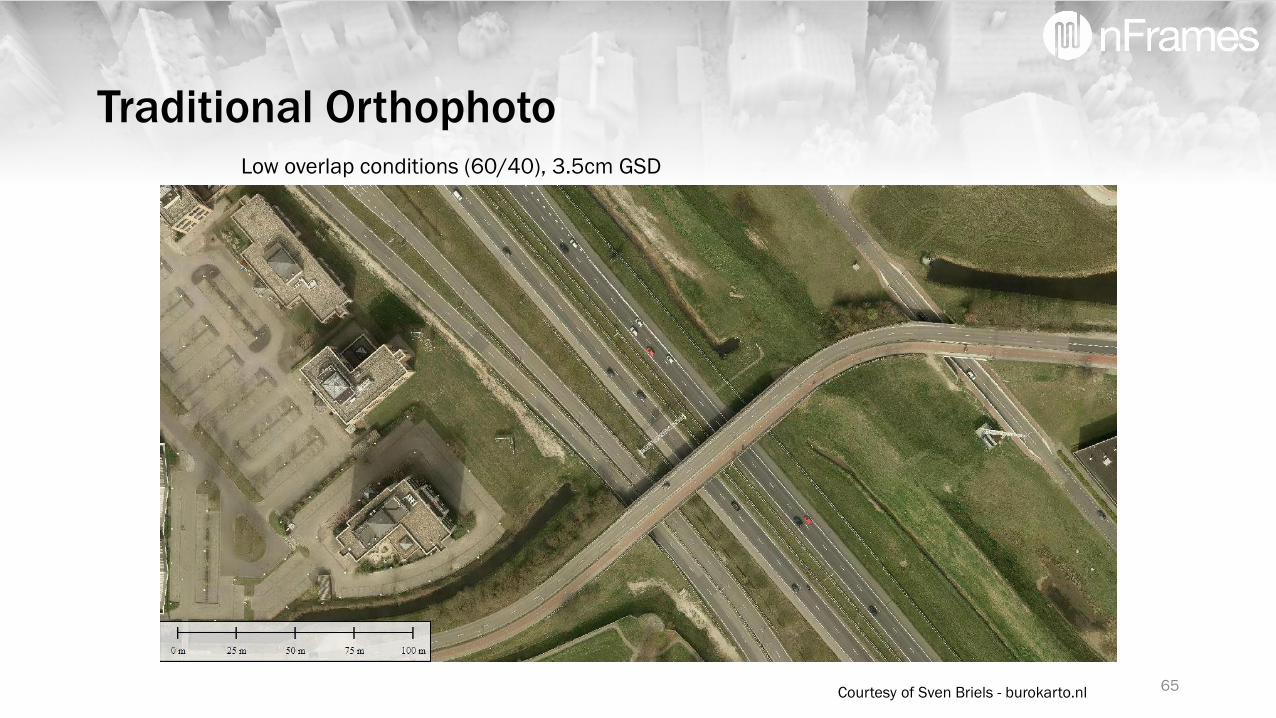
Traditional Orthophoto
65Courtesy of Sven Briels - burokarto.nl
Low overlap conditions (60/40), 3.5cm GSD
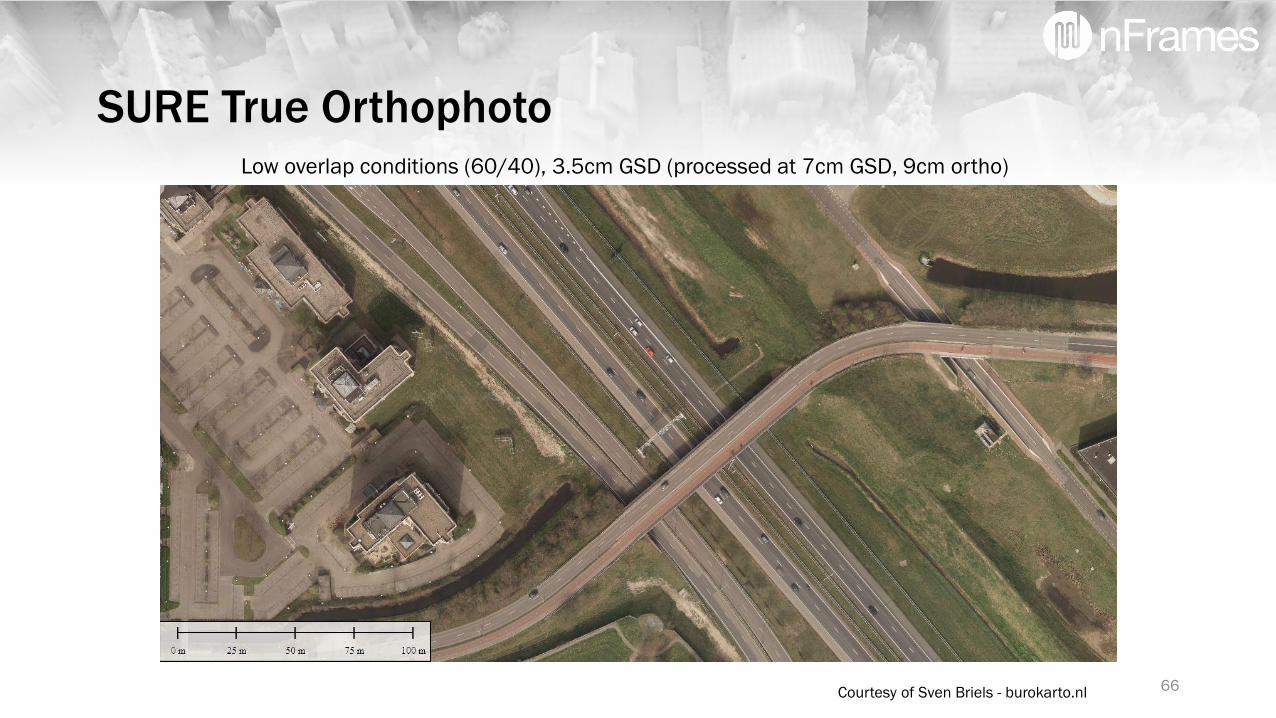
SURE True Orthophoto
66Courtesy of Sven Briels - burokarto.nl
Low overlap conditions (60/40), 3.5cm GSD (processed at 7cm GSD, 9cm ortho)

SURE: Quadtree based on DSM - Example
02.03.2015 Schwerin_2012 67

Munich [EuroSDR Matching Test, DMCII, 10cm GSD, 80/80 ov.]
Textured DSM (coming soon)

Munich [EuroSDR Matching Test, DMCII, 10cm GSD, 80/80 ov.]
Textured DSM (coming soon)

Braunschweig, 80/60 Nadir DSM
Postprocessing & retexturing by

SURE: Out-of-core point cloud filtering
» Retrieve locally densest point cloud removal of redundancy
» Validate points keep only points, which are
validated by other point clouds
» Adapt resolution locally
» Scalable – out-of-core octree
Wenzel, K., Rothermel, M., Fritsch, D., & Haala, N. (2014). Filtering of Point Clouds from Photogrammetric Surface Reconstruction

SURE: Out-of-core point cloud filtering(IGI DigiCam Penta)
Imagery courtesy of Aerowest GmbH



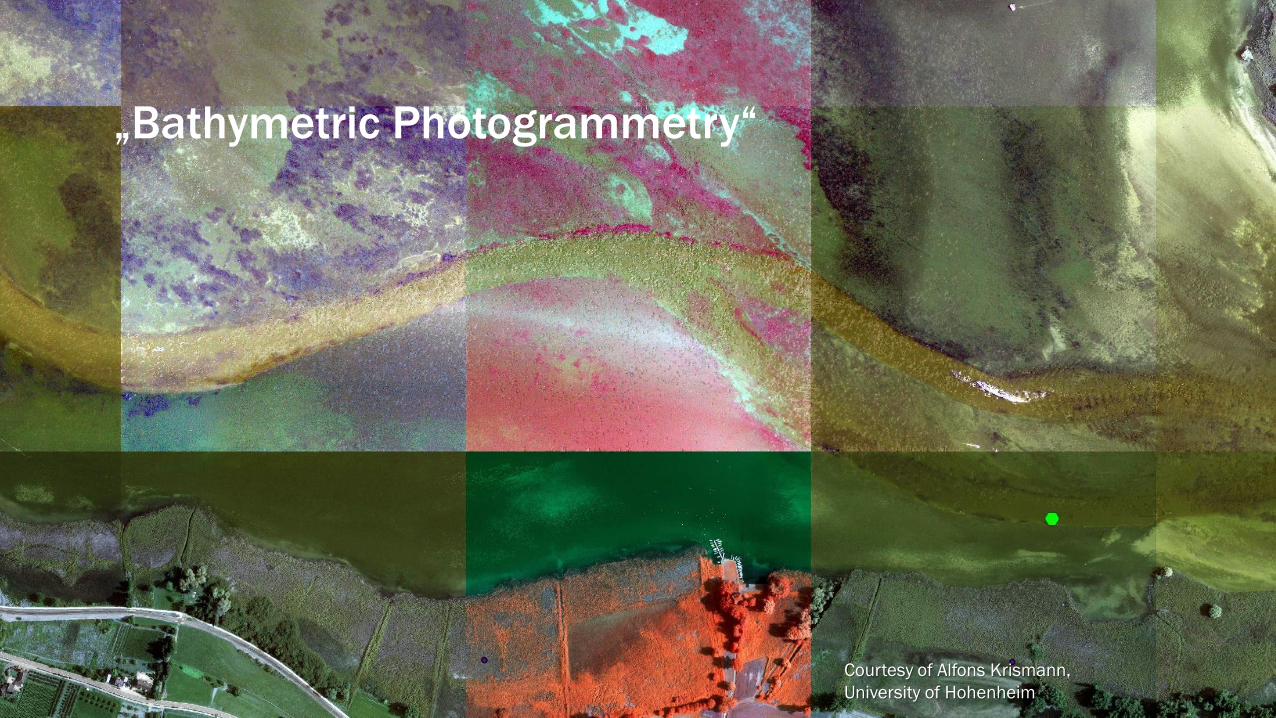
„Bathymetric Photogrammetry“
02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 75

Bathymetric Photogrammetry?
02.03.2015 76Courtesy of Alfons Krismann,
University of Hohenheim
„Bathymetric Photogrammetry“
Bathymetric Photogrammetry?
02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 77Courtesy of Alfons Krismann,
University of Hohenheim
„Bathymetric Photogrammetry“

02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 78Courtesy of Alfons Krismann,
University of Hohenheim

02.03.2015 Konrad Wenzel, University of Stuttgart, ifp 79Courtesy of Alfons Krismann,
University of Hohenheim

SURE: Observation of abliation in plasma flow
» Plasma channel
» 2500 degrees
» Mirrors
» Sub-mm accuracy
Loehle, S., Staebler, T., Reimer, T., & Cefalu, A. (2014) Photogrammetric Surface Analysis of Ablation Processes in High Enthalpy Air Plasma Flow.

SURE: Depth map fusion (Meshing)
» Rothermel, M.; Haala, N.; Fritsch, D. (2014) Generating oriented pointsets from redundant depth maps using restricted quadtrees.
» Adapt depth map resolution using Restricted Quadtree
» Choose locally optimal depth map while forcing visibility constraints

3D Meshing Example: Fusion + Poisson
02.03.2015 Schwerin_2012 82
Mesh Patches + Poisson

3D Meshing Example: Fusion + Poisson
02.03.2015 Schwerin_2012 83