cse 415 -- (c) s. tanimoto, 2008 image understanding i 1 image understanding 1 outline: saccade art:...
TRANSCRIPT

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
1
Image Understanding 1Outline:
Saccade Art: What's going on?Vision and IntelligenceMotivating applications and ideasHuman vision and illusionsImage representation: Sampling, Quantization, ThresholdingStereo vision as an AI problem Stereograms, Geometry of stereograms, Computing correspondencesLetting cues vote for hypotheses: Polar representation of a line, Hough transform

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
2
Saccade Art
A great example is at the San Francisco Exploratorium.
An online example is athttp://www.cs.washington.edu/research/metip/SaccArt/
Block off all but one stripe. Can you still see the effect? How few stripes are enough for you?
Is it an image? Is there any image?
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
3
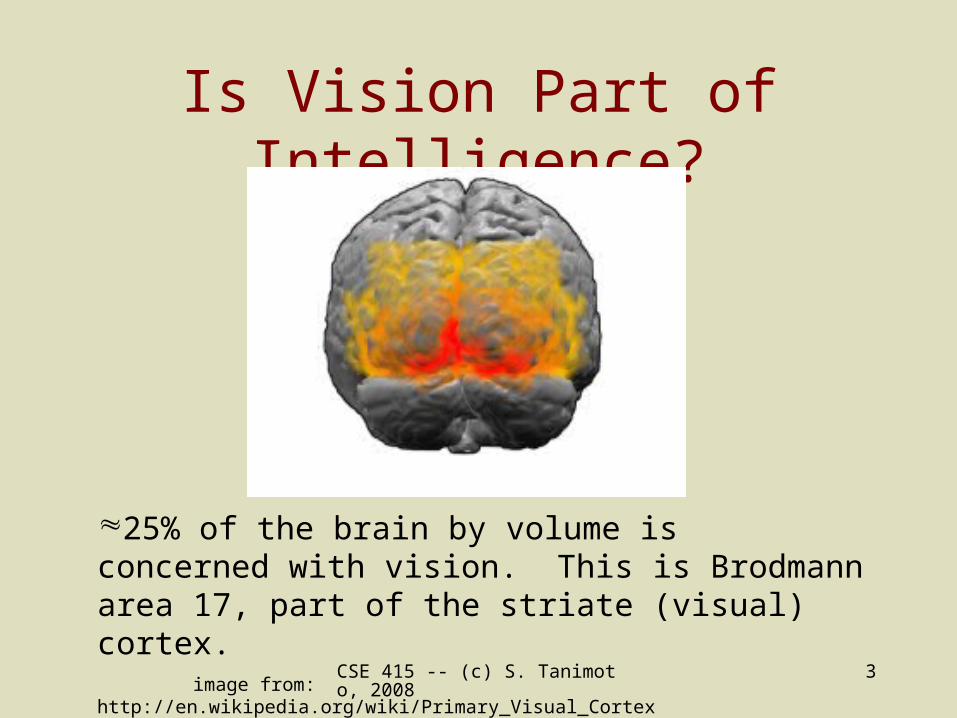
Is Vision Part of Intelligence?
25% of the brain by volume is concerned with vision. This is Brodmann area 17, part of the striate (visual) cortex.
image from: http://en.wikipedia.org/wiki/Primary_Visual_Cortex

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
4
Vision Requires Intelligence1. The image is usually missing relevant information.
2. The gaps must be filled in by making inferences using knowledge and context.
3. How are these inferences made? At many levels: At the retinal level, relevant structure is extracted from "receptive fields". The brain sends expectations to the eyes. An intermediate level theory is the Marr "Primal Sketch". High level: object-recognition.
4. Active vision is the use of motion, including eye movements, to gather scene data – the eyes must be controlled by the brain.
5. "Visual thinking" includes spatial reasoning, navigation, pattern recognition, associative memory based on visual aspects, and perception itself.
6. Specific phenomena that reflect on visual intelligence include: unawareness of blind spots, visual illusions, pareidolia, hallucination.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
5
MotivationAllow computer and robots to read books.
Allow mobile robots to navigate using vision.
Support applications in industrial inspection, medical image analysis, security and surveillance, and remote sensing of the environment.
Permit computers to recognize users’ faces, fingerprints, and to track them in various environments.
Provide prostheses for the blind.
Develop artistic intelligence.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
6
Human Vision25% of brain volume is allocated to visual perception.
Human vision is a parallel & distributed system, involving 2 eyes, retinal processing, and multiple layers of processing in the striate cortex.
Most humans are trichromats and they perceive color in a 3-D color space (except for bichromats and monochromats).
Vision provides a high-bandwidth input mechanism... “a picture is worth 1000 words.”

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
7
The Human Eye

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
8
Retina:Cross
section(a) schematic
(b) photo

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
9
Densities of Rods and Cones

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
10
Visual Pathway

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
11
Visual Illusions
Help us understand
• the limits of human perception
• the processes of perception
• ways to produce effects in art and architecture
• possible approaches to artificial perception
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
12
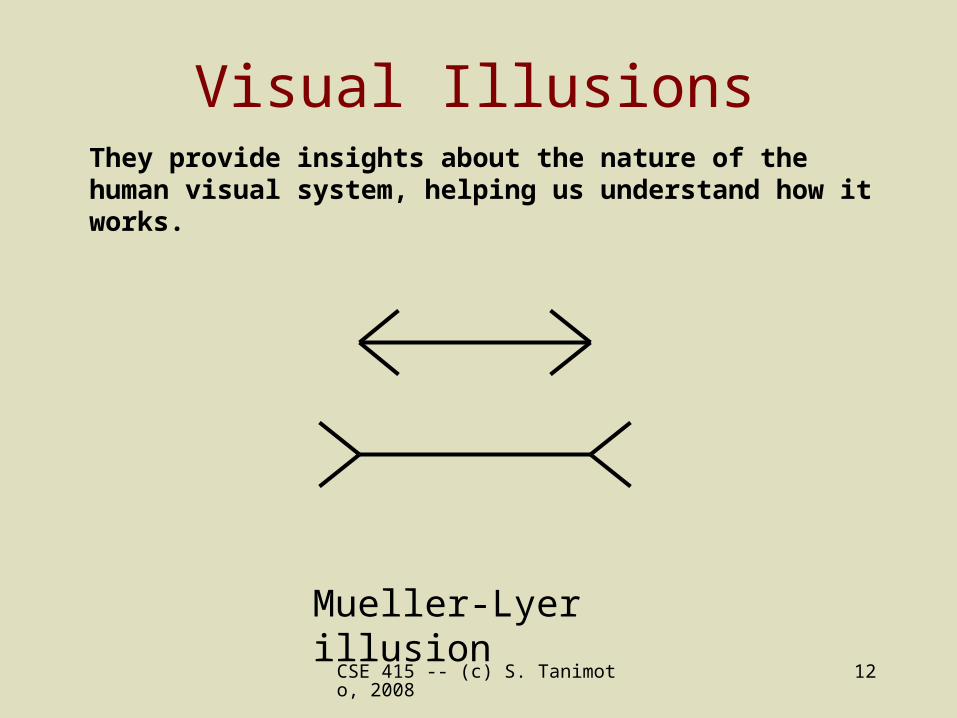
Visual IllusionsThey provide insights about the nature of the human visual system, helping us understand how it works.
Mueller-Lyer illusion
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
13
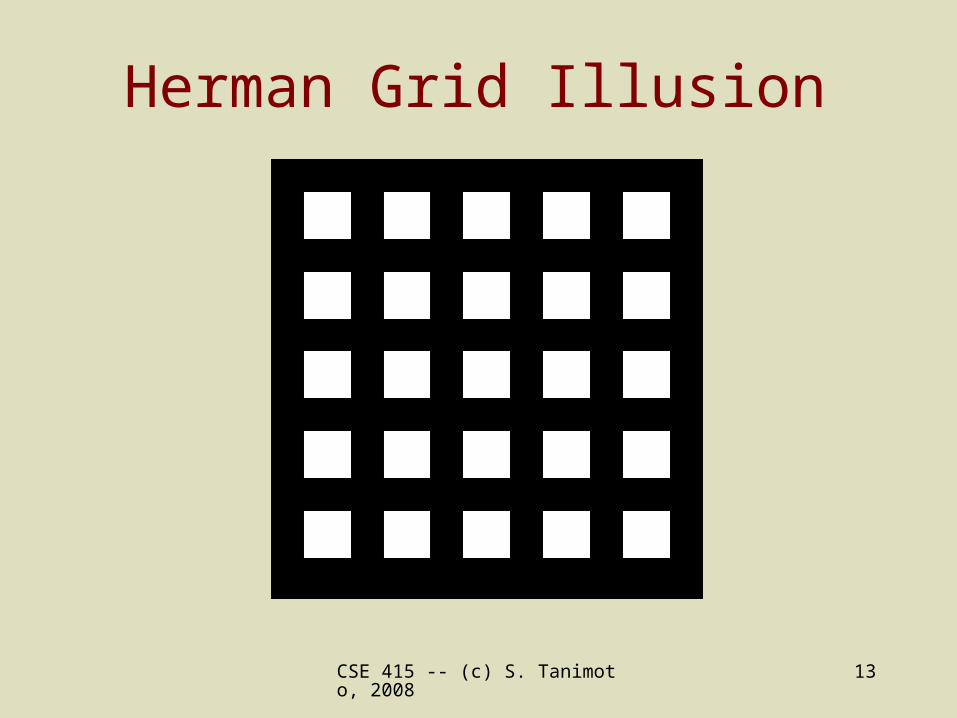
Herman Grid Illusion

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
14
Herman Grid Illusion (dark on light)

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
15
Subjective Contour (Triangle)

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
16

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
17
?
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
18
Dalmation Illusion
Camouflage vs Acute Perception
Hyperacute perception: Hallucination
Pareidolia: Attributing significance to patterns perceived in random arrangements
(UFO, visions in the twilight, etc)
From http://www.gifford.co.uk/~principia/Illusions

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
19
Perception: Stimulus + Expectation
Image understanding is the interpretation of visual stimuli using context and knowledge.
IU by computer normally begins with digital images from a camera.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
20
Image UnderstandingOutline:
Saccade Art: What's going on?Vision and IntelligenceMotivating applications and ideasHuman vision and illusionsImage representation: Sampling, Quantization, ThresholdingStereo vision as an AI problem Stereograms, Geometry of stereograms, Computing correspondencesLetting cues vote for hypotheses: Polar representation of a line, Hough transform
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
21
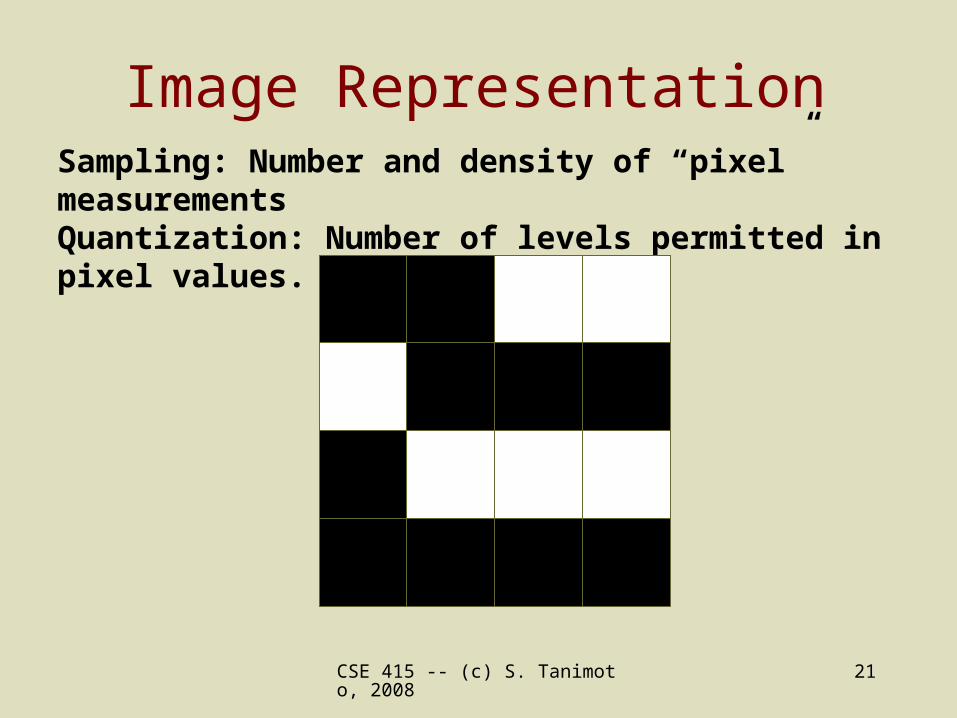
Image RepresentationSampling: Number and density of “pixel” measurementsQuantization: Number of levels permitted in pixel values.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
22
Image Representation (cont.)Sampling: e.g., 4 by 4, square grid, 1 pixel/cmQuantization: e.g., binary, {0, 1}, 0 = black, 1 = white.
1
0
11
1
11
00
00
0
0 0 0 0
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
23
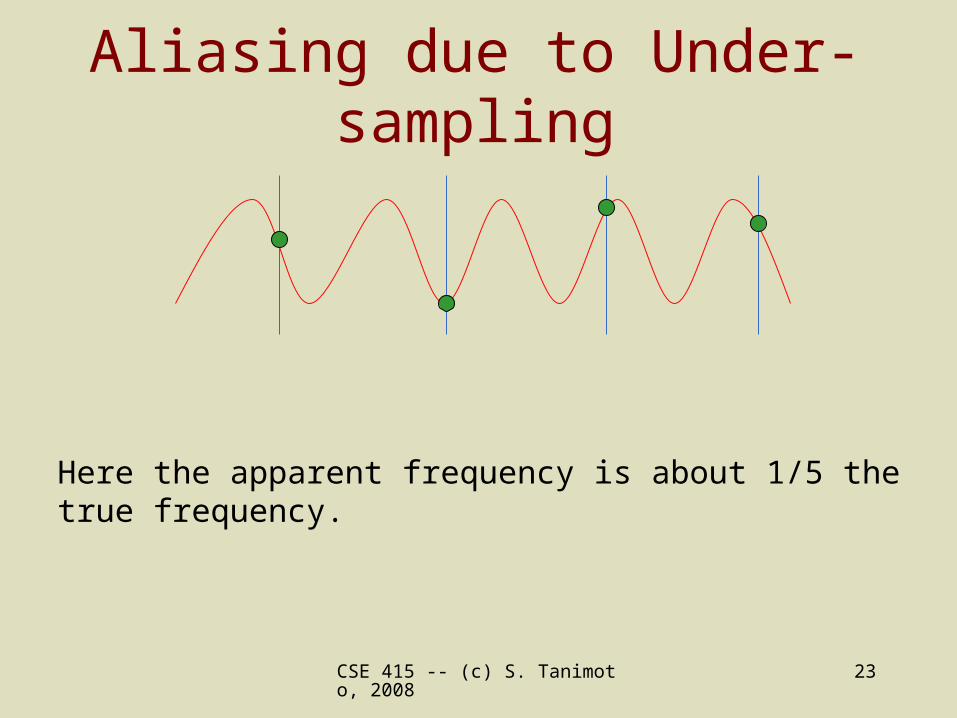
Aliasing due to Under-sampling
Here the apparent frequency is about 1/5 the true frequency.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
24
Shannon/Nyquist SamplingA band is a range of frequency values. (But sometimes it's defined as a range of wavelengths.)
A signal that is bandlimited to band B has no frequency components outside of B.
Now, we'll assume B = [0 , fmax]
Theorem:
If a continuous signal z(t) is bandlimited to B, then it is possible to sample it at a frequency of fs > 2 fmax such that z(t) can be perfectly reconstructed from the samples.
2 fmax is called the Nyquist rate.
fs / 2 is called the Nyquist frequency, and depends on fs.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
25
Minimal SamplingLet P be an oscillating pattern in an image.
To capture P in a sampled representation, you need
(1) The rest of the image to be bandlimited to P's frequency, and you need either
(2a) two samples per cycle and luck (the phase must be right),
or
(2b) more than two samples per cycle.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
26
QuantizationCapturing a wide dynamic range of brightness levels or colors requires fine quantization. Common is 256 levels of each of red, green and blue.
Segmentation is simplified by having a small number of levels -- provided foreground and background pixels are reliably distinguished by their dark or light value.
Grayscale thresholding is typically to used to reduce the number of quantization levels to 2.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
27
Vision as Inferring Information from Clues
Deriving 3D structure from 2D info requires additional information: e.g., constraints.
Deriving global descriptions from local data requires information fusion, i.e., inference.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
28
Stereo Vision as an AI Problem
Projection from 3 dimension to 2 loses information.
With 2 projections, we can gain back some of that information.
Recovering the missing information is an inference problem.
The missing information is constrained by knowledge about the real world and assumptions about the scene.
The use of knowledge and assumptions to make inferences is a standard approach in artificial intelligence.
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
29
Stereo and Stereograms
A stereogram can help us understand what information is required by a human to make convincing inferences about depth.
This can provide a model for a stereo image understanding system.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
30
StereogramsTwo-view stereograms:1. spatially separated left-eye/right-eye pair (including virtual-reality goggles)2. superimposed, with separation using color filters.3. superimposed, with temporal shuttering.4. superimposed, with separation using polarizing filters.
Single-view stereograms:1. Magic-eye pictures with depth-modulated carrier.2. Wallpaper offering depth effects due to its periodicity.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
31
Geometry of Stereograms
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
32
Computing Correspondence
Approach 1: Extract features and find a consistent matching of features in each view.
Approach 2: Directly compute a disparity map, performing local correlations of the views.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
33
Processing Incomplete and Uncertain Evidence:
How it's sometimes handled in image understanding
Case study: the Hough Transform
(rhymes with "rough France dorm")
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
34
Inferring Trends via Voting Methods
The classical Hough Transform identifies prominent lines in a scene by letting each edge point vote for the line(s) it is on.
Voting methods can do well under noisy conditions.
Votes are tallied in an array of accumulators, indexed by theta and rho (polar parameters of a line).
ρ = x cos θ + y sin θ.

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
35
Letting a Point Vote for all the Lines that Pass Through It
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
36
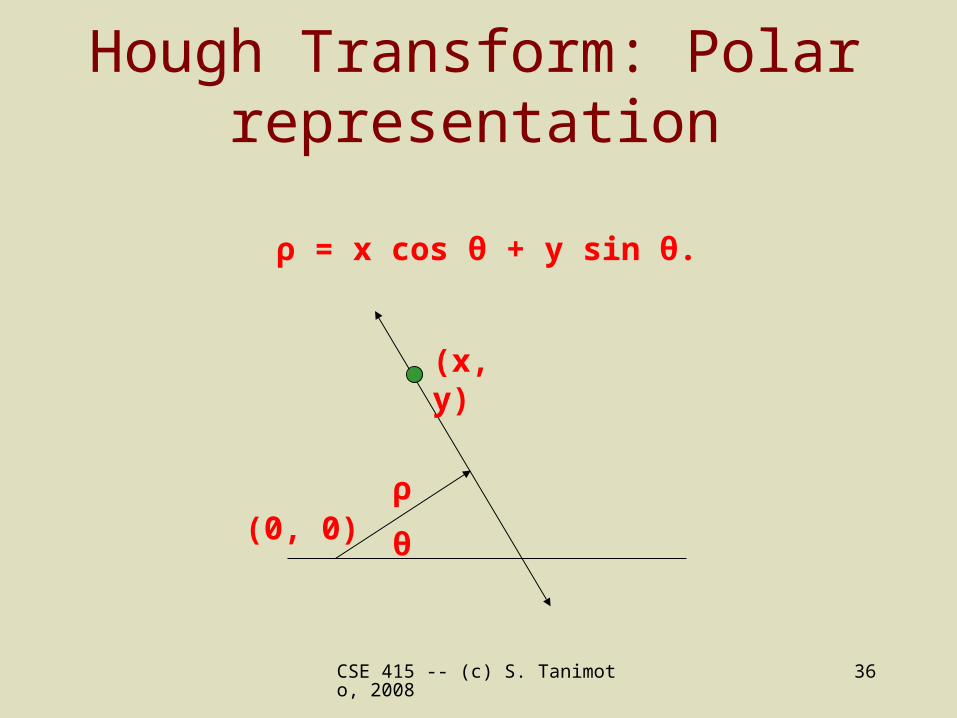
Hough Transform: Polar representation
ρ = x cos θ + y sin θ.
ρ
θ
(x, y)
(0, 0)
CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
37
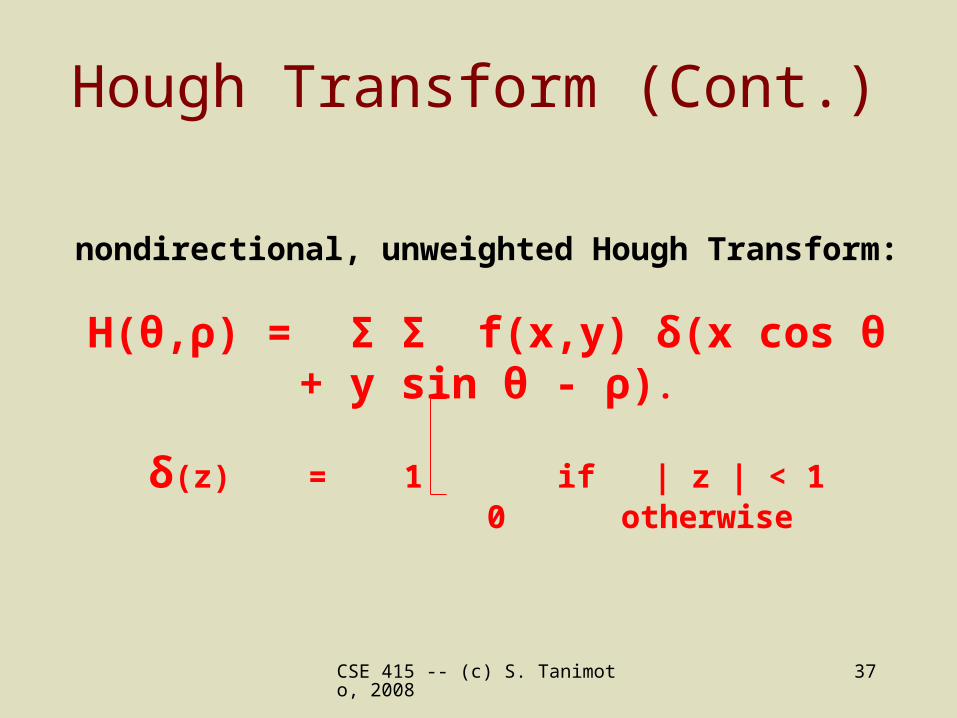
Hough Transform (Cont.)
nondirectional, unweighted Hough Transform:
H(θ,ρ) = Σ Σ f(x,y) δ(x cos θ + y sin θ - ρ).
δ(z) = 1 if | z | < 1 0 otherwise

CSE 415 -- (c) S. Tanimoto, 2008 Image Understanding I
38
H.T. Peak Detection
After vote accumulation:
Apply smoothing to suppress non-dominant peaks.
Extract peaks.
Trace lines in image space to determine endpoints.