cs 7616 pattern recognition - college of computingafb/classes/cs7616-spring2014/... · • cs 7616...
TRANSCRIPT

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Aaron Bobick School of Interactive Computing
CS 7616 Pattern Recognition Introduction

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Where are you? • CS 7616 Pattern Recognition • Web site: http://www.cc.gatech.edu/~afb/classes/CS7616-Spring2014/
• Will have posted calendar/syllabus with posted slides, problem sets with data, other administrative stuff.
• T-square: The usual stuff. There is/will be a web page under resources that points to the class web page listed above.
• Slides: PDFs will be posted by linking to the calendar. Hopefully draft by class time, but I wouldn’t count on it.
• Piazza: You will all receive an invitation to Piazza for CS7616. If not, send us email. This was invaluable for discussions for problem sets in CS4495. Not sure if here. • Announcements will likely be done through both T-Square (and email) and Piazza
• Matlab access: if you don’t know how to get Matlab access, first ask a friend. Then come see TAs or me. If you want to use Python/Numpy that’s OK.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Who are you? • From the web site:
This is a graduate level for those interested in pattern recognition in general and for some elements as applied to computer vision. It is *not* going to be a comprehensive Machine Learning course.
• What do you know?
• A good foundation of probability and linear algebra. This class will have more math in it than most Computer Science classes.
• Any Machine Learning background will help. Though the course won’t technically presume ML as a background it will be much easier to grasp if you’ve seen things like graphical models or other inference structures.
• A good working knowledge of Matlab or Python with Numpy. We will likely be doing things in Matlab in class. I am pretty sure that Octave will be OK though the lack of some plotting make may some figures harder to generate. Because this is my first time offering this class I can only speculate on this.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Who are we? Professor:
Aaron Bobick [email protected] Office: CCB 316 Office hours:
Tues 1-2pm (email is much better)
TA:
Abhijit Kundu [email protected] Office: CCB 308 Office hours: TBD

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
What will you read?
Hastie, Tibshirani, and Friedman:
The Elements of Statistical Learning
• Kevin Murphy’s book: Machine Learning: a Probabilistic Perspective
(free pdf)
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
What you will do? • NB: This is the first time I have taught this class. This is a
plan, maybe not even a plan but a goal, certainly not a commitment !
• Your grade is mostly project based set based. • Communal projects (everyone does mostly the same): 60% • Your unique final project 30% • Class presentation (10% - but class size may revamp this) • Class participation – max of 10% (ie it can only help your grade).
• There will not be a final exam.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
When will you do them? • You will have plenty of time for the projects. But they must be
submitted on time.
• Late submissions will only be accepted at full credit with prior approval. Otherwise 50% (yes half) reduction.
• TA/Prof *not* obligated to get back to you about permission the weekend it is due! At your own risk.
• I will be very adamant about this. Not fair to others or the TA.
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
With whom will you do it? • Honesty/Integrity policy (from web site):
Problem sets are to be done individually (or within your group of no more than two) but you may collaborate at the “white board level” helping each other with algorithms and general computation, BUT YOUR CODE MUST BE YOUR OWN.
• Do not hand in other people’s code unless you (1) say you are, and (2) you want no credit for that section. We will be explicit about what previous or provided code you can use.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
How will you do it? • We will mostly support Matlab
• I know how to program Matlab. • I am not going to use R. • I am not going to (deeply) learn Python. • All the algorithms and demos in Murphy’s book are available in Matlab.
• If you want to use some thing else • Fine • Your job to make it work. • TA not obligated to help.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Any questions so far…
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Who am I… • Background: degrees in Math, CS but PhD in CogSci/AI;
interest in high level perception and cognition
• Faculty at the MIT Media Lab for a while – developed lots of work in machine understanding of action from video
• Came here 14 years ago, and collected hats: • Was GVU director • Founding chair of the School of Interactive Computing • But the most fun is being professor in Computational
Perception and Robotics!

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Research I used to do…
Action recognition from video
•Lots of domains/levels of complexity:
•Body motions •Gesture recognition, •Football plays •Aware Home •Surveillance

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
What I am doing now…
Outdoor
Robots that “see”… not (just) a question of geometry but understanding.
Indoor
Human Robot Interaction

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Two specific projects: (Vision for) Human-robot
collaboration in manufacturing (with BMW!)
Affordance-based perception:
Robot learning the “affordances” of objects and how to use in planning and
acting.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Why am I teaching this class? • Because I have to teach another class (besides Computer
Vision) …
• Because I used to teach PR from Duda and Hart (and Stork) which was written somewhere between the Stone Age and the invention of the Prius…
• Because I keep running into PR problems and I really should understand them better…
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
A few inspirations…

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
• Adaboost classification
• Weak classifiers: Haar-basis like functions (45,396 in total)
Boosting Simple Features [Viola and Jones CVPR 01]
18
Weak classifier
Strong classifier
𝑓 𝑥 = �𝛼𝑡ℎ𝑡 𝑥𝑇
𝑡=1
ℎ𝑡 𝑥 = � 1 if 𝑓𝑡(𝑥) > 0 −1 otherwise

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Boosting Simple Features [Viola and Jones CVPR 01]
• Integral image • A value at (x,y) is the sum of the
pixel values above and to the left of (x,y).
• The sum of original image values within the rectangle can be computed: Sum = A-B-C+D
19 ICCV09 Tutorial Tae-
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
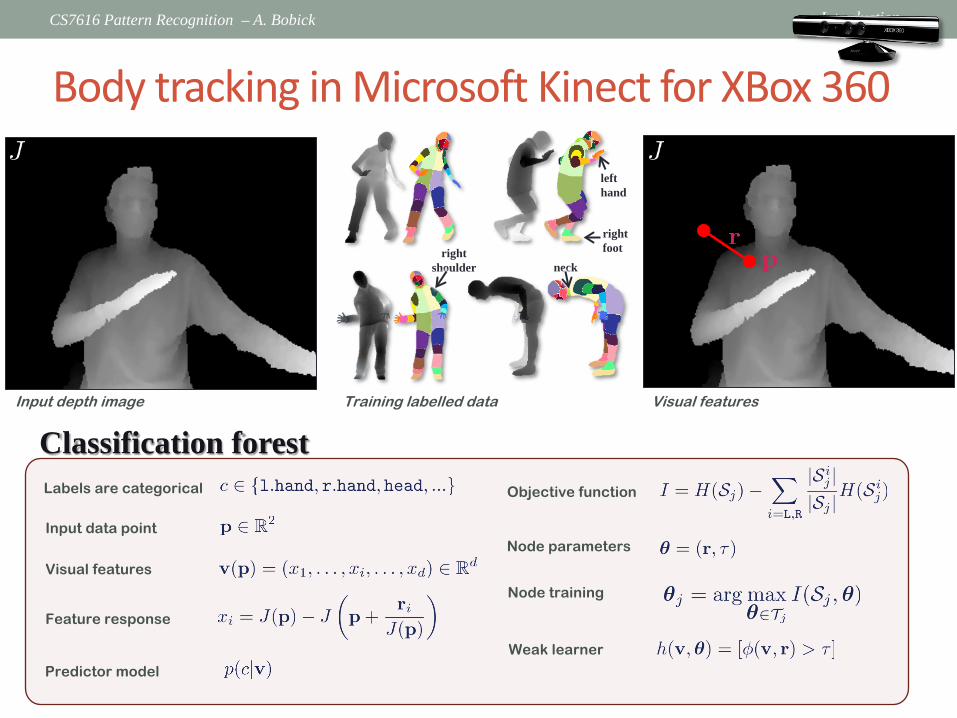
Body tracking in Microsoft Kinect for XBox 360
left hand
right shoulder neck
right foot
Input depth image Training labelled data Visual features
Objective function
Node training
Labels are categorical
Input data point
Predictor model
Classification forest
Visual features
Node parameters
Weak learner
Feature response

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Input depth image (bg removed) Inferred body parts posterior
Body tracking in Microsoft Kinect for XBox 360
(2 videos here)

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
But what did I really want to do?

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
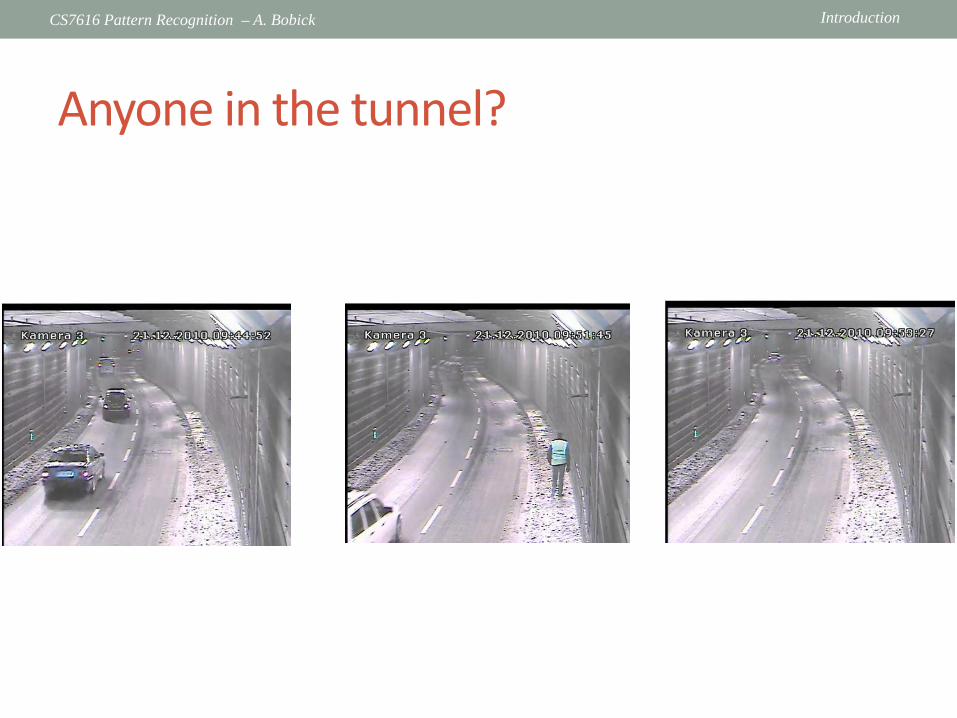
A “simple” detection problem
Is it a real person?
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Anyone in the tunnel?
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Questions we asked? • Are we doing detection via decision (Viola Jones) or detection
then recognition? Or hybrid? • What are the features we’re going to use? • What’s our data source? Negatives are easy to get; how do we
get positives? • Is there something about appearance that is invariant across
scenes/cameras? Or is every camera a new system? And then… • What methods are we going to use to make the decision? • I wasn’t sure. Had some ideas but not grounded well enough.
• This is why I am teaching this class…
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
What we’re going to do? • Focusing on categorical labels - “Pattern Recognition” is really
decision theory applied to data • Review the basics of probability, density estimation and
generative methods for decision making. • Consider loss functions? • Explore application of generative methods to some fixed data sets that
have “modest” numbers of features and variable numbers of training examples.
• Then investigate discriminative models and methods • “Small” vs “large” numbers of features • “Small” vs “large” numbers training examples; unbalanced
• Most things in the two texts that is focused on making a decision
• Lots of forests, trees, boosting, bagging
Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
What we’re not going to do? • As little as possible on regression – the prediction of
continuous valued variables. • Not so much on large pattern (many little variables) problems:
• Maybe no neural nets – or at least as little as possible. A little about deep learning from the perspective of features.

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Your first assignment! • Due next Tuesday, Jan 14.
• Find an available data set that corresponds to “modest”
number of features and “small” number of classes • Modest – plausible to try all or many possible subsets of features • Small - maybe less than 5. 2 is ideal. 30 would be too many.
• Submit a one page description of the data, how we would get it within a week. (Are you making it? That’s OK)

Introduction CS7616 Pattern Recognition – A. Bobick Introduction CS7616 Pattern Recognition – A. Bobick
Going forward • For coming lectures:
• HTF: read ch 1&2
• Get yourself Matlab (and/or Python)
• Make sure you’re invited to Piazza