cs 545: introduction to robotics
TRANSCRIPT

1
CS 545: Introduction to Robotics
Instructor: Prof. Hadi Moradi, d [email protected]
Lectures: M-Th 11:00-12:40, GFS118Office hours: MW 2:30 – 4:00 pm, SAL310,
Or by appointmentOr by appointment
TAs: Jeong-Yoon [email protected]: SAL 112 Office hours: TTH 1:00-2:30PM
CS 545: Introduction to Robotics
Course web page:Course web page:http://www-scf.usc.edu/~csci545Up to date information, lecture notes Relevant dates, links, etc.
Course material:Course material:Robot Modeling and Control by Spong, Hutchinson, and Vidyasagar
Class format: two sections of 45 minutes

2
CS 545: Introduction to Robotics
Course overview: fundamentals of roboticsCourse overview: fundamentals of robotics including kinematics, dynamics, motion planning and localization.Prerequisites: CS 455x, i.e.,
programming principles, discrete mathematics p g g p p ,for computing, software design and software engineering concepts. Some knowledge of C/C++ for some programming assignments.
CS 545: Introduction to Robotics
Grading:Grading:25% for midterm 25% for final 50% for homeworks and projects

3
Practical issues
Class list: use blackboard usc eduClass list: use blackboard.usc.edu
Login with your USC username and password
Administrative Issues
Midterm: 7/26/09 11:00 12:40pmMidterm: 7/26/09 11:00 - 12:40pm
Final: 8/10/10 11:00 - 12:40pm
See also the class web page:http://blackboard usc edu/http://blackboard.usc.edu/
4
History
Robot: slaveRobot: slaveCoined in 1921: Playwright by Karel Capek
Issac Asimov laws:A robot may not …A robot must …A robot must …A robot must …
Industrial Automation
Rigid automationRigid automation
5
Industrial Automation
Programmable automationProgrammable automationLow-to-midium batches of different types
Industrial Automation
Flexible automationFlexible automation Different types, different batches

6
RobotsIndustrial robots:Industrial robots:
Tasks:PalletingPick up and placeMill and machine toolingPackagingWelding
Mechanical structureActuatorsSensorsControl system

7
Robot examples
PUMA armPUMA armK6
Symbolic Representation of Joints

8
Definitions:Configuration:Configuration:
Configuration space:Set of all possible configurations
State Space:Configuration + velocities
WorkspaceReachable workspaceDexterous workspace (subspace of reachable)
Classification of Robotic Manipulators
Power source:Power source:Hydraulic:Electric:Pneumatic:
Method of control:Open-loopClosed-loopClosed loop
Application area:AssemblyNon-assembly

9
Robotic System
Accuracy vs. Repeatability
Accuracy: How close to a given pointAccuracy: How close to a given pointRepeatability: How close to previously taught point.

10
Linear vs. rotational link
Wirst Structure

11
Articulated Manipulator (RRR)
Workspace of RRR

12
Parallelogram Linkage
h i hWhat is the advantage of putting the actuation on the first link?
SCARA Manipulator (RRP)Selective Compliant Articulated Robot for Assembly

13
Cartesian Manipulator (PPP)
Workspace Comparison

14
Parallel Manipulators
A Typical Problem

15
Coordinate Frames
Forward Kinematics
16
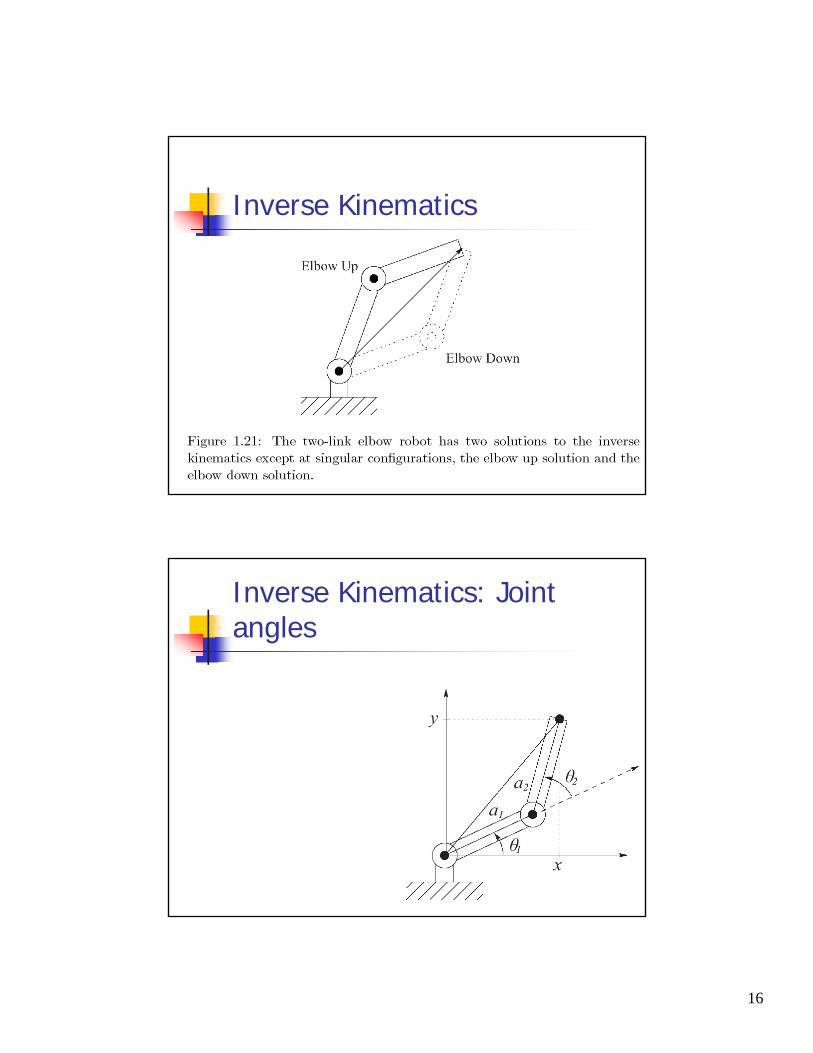
Inverse Kinematics
Inverse Kinematics: Joint angles

17
Velocity Kinematics
Speed of tool based on the speed ofSpeed of tool based on the speed of joints
Singular ConfigurationReduction in DOFReduction in DOF

18
Path planning and Trajectory Planning
Independent Joint Control

19
Other issues
DynamicsDynamicsMultivariable control:Force control:Computer VisionVi i b d t lVision-based control
Issues in industrial robots
DesignDesignKinematicsInverse kinematicsDynamicsI d iInverse dynamics