corrected position estimation in pet detector modules with multi-anode pmts using neural networks
TRANSCRIPT

776 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 53, NO. 3, JUNE 2006
Corrected Position Estimation in PET DetectorModules With Multi-Anode PMTs
Using Neural NetworksR. J. Aliaga, J. D. Martínez, R. Gadea, A. Sebastiá, J. M. Benlloch, F. Sánchez, N. Pavón, and Ch. Lerche
Abstract—This paper studies the use of Neural Networks (NNs)for estimating the position of impinging photons in gamma raydetector modules for PET cameras based on continuous scintil-lators and Multi-Anode Photomultiplier Tubes (MA-PMTs). Thedetector under study is composed of a 49 49 10 mm3 contin-uous slab of LSO coupled to a flat panel H8500 MA-PMT. Fourdigitized signals from a charge division circuit, which collects cur-rents from the 8 8 anode matrix of the photomultiplier, are usedas inputs to the NN, thus reducing drastically the number of elec-tronic channels required. We have simulated the computation ofthe position for 511 keV gamma photons impacting perpendicu-larly to the detector surface. Thus, we have performed a thoroughanalysis of the NN architecture and training procedures in order toachieve the best results in terms of spatial resolution and bias cor-rection. Results obtained using GEANT4 simulation toolkit show aresolution of 1.3 mm/1.9 mm FWHM at the center/edge of the de-tector and less than 1 mm of systematic error in the position nearthe edges of the scintillator. The results confirm that NNs can par-tially model and correct the non-uniform detector response usingonly the position-weighted signals from a simple 2D DPC circuit.Linearity degradation for oblique incidence is also investigated. Fi-nally, the NN can be implemented in hardware for parallel realtime corrected Line-of-Response (LOR) estimation. Results on re-sources occupancy and throughput in FPGA are presented.
I. INTRODUCTION
THE accurate positioning of the impinging photons on eachdetector module is a critical issue when designing high res-
olution PET cameras. There are several approaches, althoughthe simplest and most common is by obtaining the centroid ofthe scintillation light distribution. However, this method, usedin the original Anger’s scintillation camera [1], usually relieson correction maps obtained through a comprehensive calibra-tion in order to correct the non-linearities present in the de-tection process: non-uniform spatial behaviour, differences be-tween each PMT gain or the deformation of the light distributionwhen it approaches the edge of the scintillator.
All these phenomena generally imply a reduction of the in-trinsic resolution and the presence of non-uniform compressionartifacts in the image. The main consequence is an unavoid-able reduction of the useful field of view (UFOV) of the PET
Manuscript received June 19, 2005; revised April 6, 2006. This work wassupported in part by the Spanish Government under project CICYT DPI 2004-04268-C02-02.
R. J. Aliaga, J. D. Martínez, R. Gadea, and A. Sebastiá are with the De-partment of Electronic Engineering of the Universidad Politécnica de Valencia,46022 Valencia, Spain.
J. M. Benlloch, F. Sánchez, N. Pavóon, and Ch. Lerche are with the Institutode Fsica Corpuscular (CSIC-UV), Valencia, Spain (e-mail: [email protected]).
Digital Object Identifier 10.1109/TNS.2006.875438
Fig. 1. Example of a photon impacting on our detector using GEANT4 sim-ulation (left) and the main detector characteristics (right)
camera. The last is even more important in small PET cameras,where the maximization of the UFOV is a priority. Furthermore,a corrected position estimation is definitively crucial in detectorsbased on continuous scintillators because all errors translate al-most directly to the obtained image.
Thus, several positioning schemes have been developed withthe goal of alleviating systematic errors of centroid-based ap-proaches [2], [3]. Nevertheless, they require a no-less detailedmodel of the detector and off-line processing times in the orderof hundreds of per event in general purpose computers.
In this work, we investigate how Neural Networks (NNs)could be used for bias-corrected position estimation. Thus, wetry to take advantage of the capabilities of NNs for modellingthe real detector response. Moreover, NNs can be translatedto hardware, enabling real time corrected Line-of-Response(LOR) computation with shorter processing times.
Some previous works have been made in this area for PMT[4] and APD-based [5] detectors. Nevertheless, this paperdeals with detectors based on continuous scintillators andMulti-Anode PMTs (MA-PMTs) employing charge divisionread-out circuits [i.e., Discretized Positioning Circuits (DPC)][6]) in order to enable a hardware implementation of the posi-tion estimation module.
The paper is organized as follows: in Section II we describethe materials and methods used both during simulation, trainingand results validation. Section III introduces NNs and their ap-plication to position estimation in ray detectors. Next, in Sec-tion IV we analyze the optimization process of the NN and thehardware implementation results. Sections V and VI show anddiscuss the main results and the future work. Finally, we presentthe conclusions of this work in Section VII.
0018-9499/$20.00 © 2006 IEEE
ALIAGA et al.: CORRECTED POSITION ESTIMATION 777
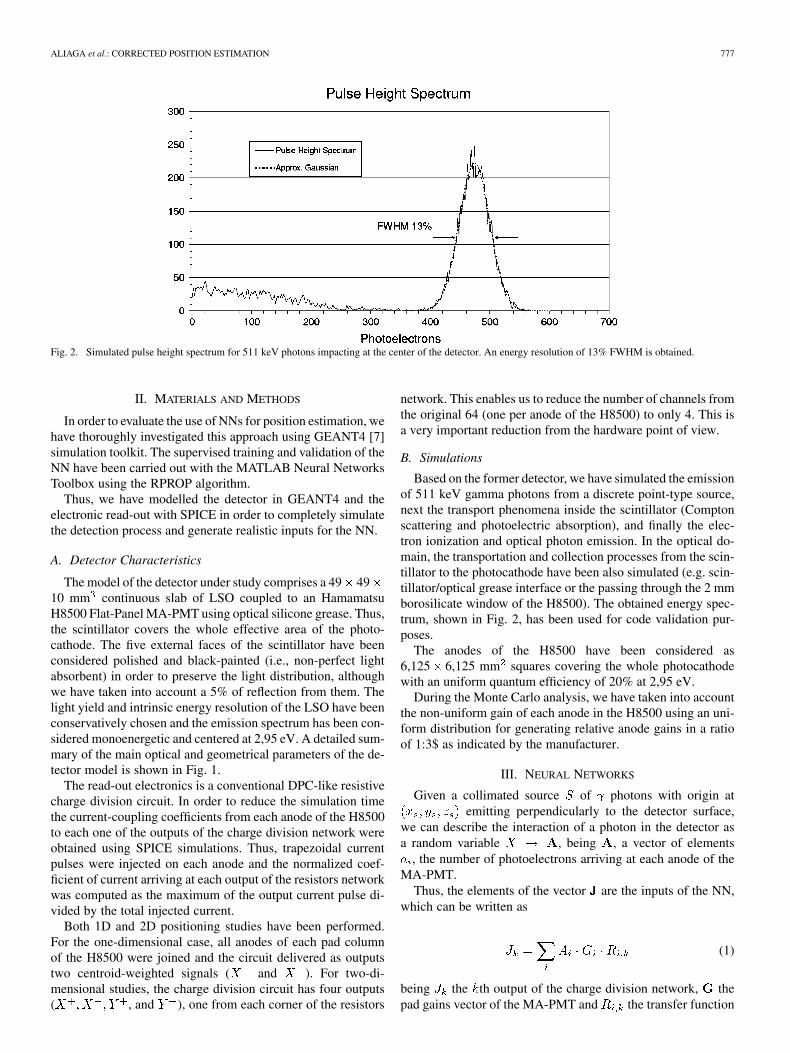
Fig. 2. Simulated pulse height spectrum for 511 keV photons impacting at the center of the detector. An energy resolution of 13% FWHM is obtained.
II. MATERIALS AND METHODS
In order to evaluate the use of NNs for position estimation, wehave thoroughly investigated this approach using GEANT4 [7]simulation toolkit. The supervised training and validation of theNN have been carried out with the MATLAB Neural NetworksToolbox using the RPROP algorithm.
Thus, we have modelled the detector in GEANT4 and theelectronic read-out with SPICE in order to completely simulatethe detection process and generate realistic inputs for the NN.
A. Detector Characteristics
The model of the detector under study comprises a 49 4910 mm continuous slab of LSO coupled to an HamamatsuH8500 Flat-Panel MA-PMT using optical silicone grease. Thus,the scintillator covers the whole effective area of the photo-cathode. The five external faces of the scintillator have beenconsidered polished and black-painted (i.e., non-perfect lightabsorbent) in order to preserve the light distribution, althoughwe have taken into account a 5% of reflection from them. Thelight yield and intrinsic energy resolution of the LSO have beenconservatively chosen and the emission spectrum has been con-sidered monoenergetic and centered at 2,95 eV. A detailed sum-mary of the main optical and geometrical parameters of the de-tector model is shown in Fig. 1.
The read-out electronics is a conventional DPC-like resistivecharge division circuit. In order to reduce the simulation timethe current-coupling coefficients from each anode of the H8500to each one of the outputs of the charge division network wereobtained using SPICE simulations. Thus, trapezoidal currentpulses were injected on each anode and the normalized coef-ficient of current arriving at each output of the resistors networkwas computed as the maximum of the output current pulse di-vided by the total injected current.
Both 1D and 2D positioning studies have been performed.For the one-dimensional case, all anodes of each pad columnof the H8500 were joined and the circuit delivered as outputstwo centroid-weighted signals ( and ). For two-di-mensional studies, the charge division circuit has four outputs( , and ), one from each corner of the resistors
network. This enables us to reduce the number of channels fromthe original 64 (one per anode of the H8500) to only 4. This isa very important reduction from the hardware point of view.
B. Simulations
Based on the former detector, we have simulated the emissionof 511 keV gamma photons from a discrete point-type source,next the transport phenomena inside the scintillator (Comptonscattering and photoelectric absorption), and finally the elec-tron ionization and optical photon emission. In the optical do-main, the transportation and collection processes from the scin-tillator to the photocathode have been also simulated (e.g. scin-tillator/optical grease interface or the passing through the 2 mmborosilicate window of the H8500). The obtained energy spec-trum, shown in Fig. 2, has been used for code validation pur-poses.
The anodes of the H8500 have been considered as6,125 6,125 mm squares covering the whole photocathodewith an uniform quantum efficiency of 20% at 2,95 eV.
During the Monte Carlo analysis, we have taken into accountthe non-uniform gain of each anode in the H8500 using an uni-form distribution for generating relative anode gains in a ratioof 1:3$ as indicated by the manufacturer.
III. NEURAL NETWORKS
Given a collimated source of photons with origin atemitting perpendicularly to the detector surface,
we can describe the interaction of a photon in the detector asa random variable , being , a vector of elements
, the number of photoelectrons arriving at each anode of theMA-PMT.
Thus, the elements of the vector are the inputs of the NN,which can be written as
(1)
being the th output of the charge division network, thepad gains vector of the MA-PMT and the transfer function
778 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 53, NO. 3, JUNE 2006
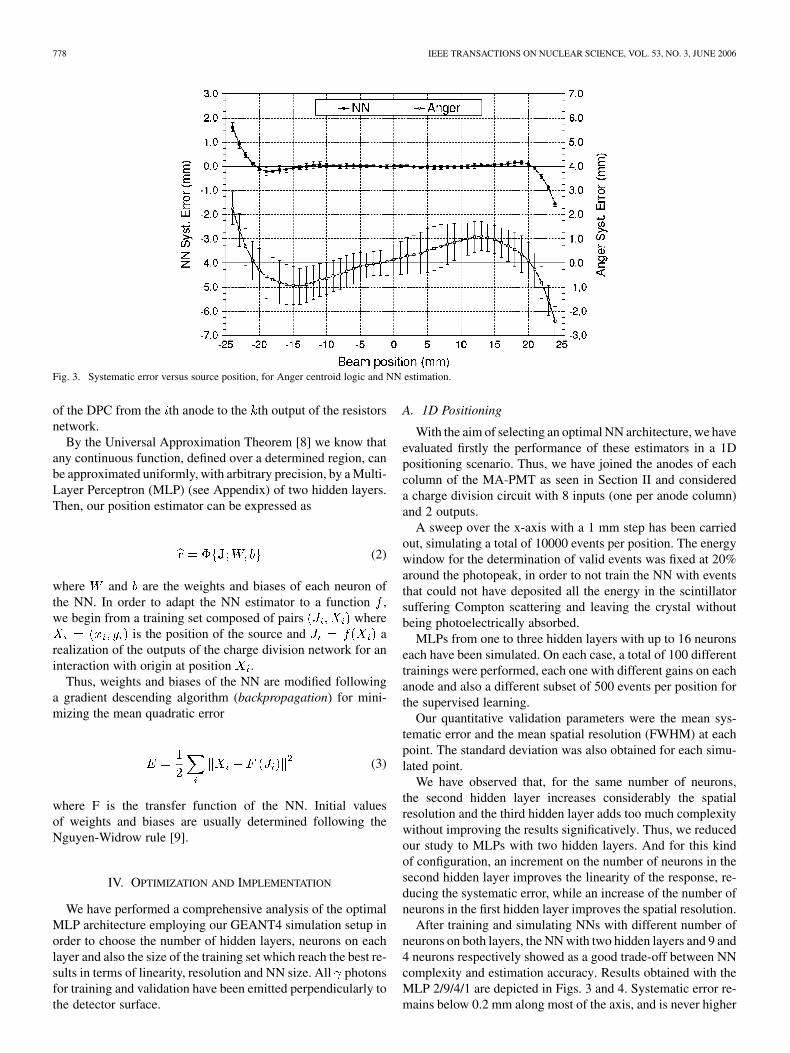
Fig. 3. Systematic error versus source position, for Anger centroid logic and NN estimation.
of the DPC from the th anode to the th output of the resistorsnetwork.
By the Universal Approximation Theorem [8] we know thatany continuous function, defined over a determined region, canbe approximated uniformly, with arbitrary precision, by a Multi-Layer Perceptron (MLP) (see Appendix) of two hidden layers.Then, our position estimator can be expressed as
(2)
where and are the weights and biases of each neuron ofthe NN. In order to adapt the NN estimator to a function ,we begin from a training set composed of pairs where
is the position of the source and arealization of the outputs of the charge division network for aninteraction with origin at position .
Thus, weights and biases of the NN are modified followinga gradient descending algorithm (backpropagation) for mini-mizing the mean quadratic error
(3)
where F is the transfer function of the NN. Initial valuesof weights and biases are usually determined following theNguyen-Widrow rule [9].
IV. OPTIMIZATION AND IMPLEMENTATION
We have performed a comprehensive analysis of the optimalMLP architecture employing our GEANT4 simulation setup inorder to choose the number of hidden layers, neurons on eachlayer and also the size of the training set which reach the best re-sults in terms of linearity, resolution and NN size. All photonsfor training and validation have been emitted perpendicularly tothe detector surface.
A. 1D Positioning
With the aim of selecting an optimal NN architecture, we haveevaluated firstly the performance of these estimators in a 1Dpositioning scenario. Thus, we have joined the anodes of eachcolumn of the MA-PMT as seen in Section II and considereda charge division circuit with 8 inputs (one per anode column)and 2 outputs.
A sweep over the x-axis with a 1 mm step has been carriedout, simulating a total of 10000 events per position. The energywindow for the determination of valid events was fixed at 20%around the photopeak, in order to not train the NN with eventsthat could not have deposited all the energy in the scintillatorsuffering Compton scattering and leaving the crystal withoutbeing photoelectrically absorbed.
MLPs from one to three hidden layers with up to 16 neuronseach have been simulated. On each case, a total of 100 differenttrainings were performed, each one with different gains on eachanode and also a different subset of 500 events per position forthe supervised learning.
Our quantitative validation parameters were the mean sys-tematic error and the mean spatial resolution (FWHM) at eachpoint. The standard deviation was also obtained for each simu-lated point.
We have observed that, for the same number of neurons,the second hidden layer increases considerably the spatialresolution and the third hidden layer adds too much complexitywithout improving the results significatively. Thus, we reducedour study to MLPs with two hidden layers. And for this kindof configuration, an increment on the number of neurons in thesecond hidden layer improves the linearity of the response, re-ducing the systematic error, while an increase of the number ofneurons in the first hidden layer improves the spatial resolution.
After training and simulating NNs with different number ofneurons on both layers, the NN with two hidden layers and 9 and4 neurons respectively showed as a good trade-off between NNcomplexity and estimation accuracy. Results obtained with theMLP 2/9/4/1 are depicted in Figs. 3 and 4. Systematic error re-mains below 0.2 mm along most of the axis, and is never higher
ALIAGA et al.: CORRECTED POSITION ESTIMATION 779
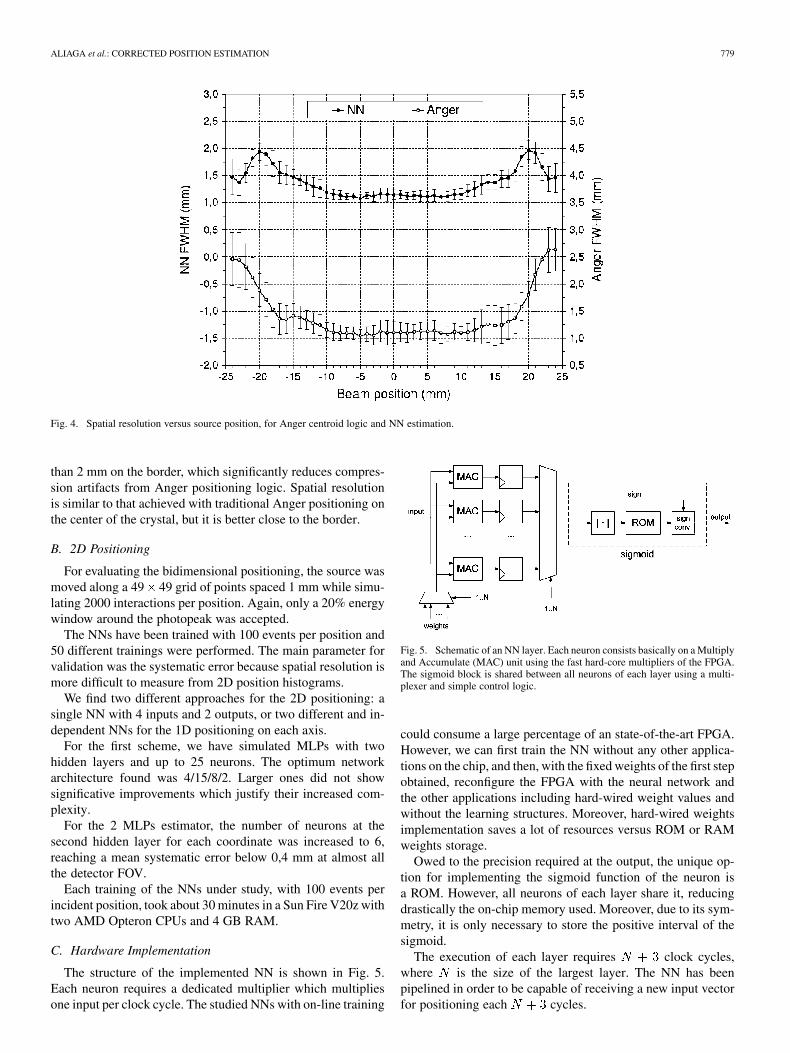
Fig. 4. Spatial resolution versus source position, for Anger centroid logic and NN estimation.
than 2 mm on the border, which significantly reduces compres-sion artifacts from Anger positioning logic. Spatial resolutionis similar to that achieved with traditional Anger positioning onthe center of the crystal, but it is better close to the border.
B. 2D Positioning
For evaluating the bidimensional positioning, the source wasmoved along a 49 49 grid of points spaced 1 mm while simu-lating 2000 interactions per position. Again, only a 20% energywindow around the photopeak was accepted.
The NNs have been trained with 100 events per position and50 different trainings were performed. The main parameter forvalidation was the systematic error because spatial resolution ismore difficult to measure from 2D position histograms.
We find two different approaches for the 2D positioning: asingle NN with 4 inputs and 2 outputs, or two different and in-dependent NNs for the 1D positioning on each axis.
For the first scheme, we have simulated MLPs with twohidden layers and up to 25 neurons. The optimum networkarchitecture found was 4/15/8/2. Larger ones did not showsignificative improvements which justify their increased com-plexity.
For the 2 MLPs estimator, the number of neurons at thesecond hidden layer for each coordinate was increased to 6,reaching a mean systematic error below 0,4 mm at almost allthe detector FOV.
Each training of the NNs under study, with 100 events perincident position, took about 30 minutes in a Sun Fire V20z withtwo AMD Opteron CPUs and 4 GB RAM.
C. Hardware Implementation
The structure of the implemented NN is shown in Fig. 5.Each neuron requires a dedicated multiplier which multipliesone input per clock cycle. The studied NNs with on-line training
Fig. 5. Schematic of an NN layer. Each neuron consists basically on a Multiplyand Accumulate (MAC) unit using the fast hard-core multipliers of the FPGA.The sigmoid block is shared between all neurons of each layer using a multi-plexer and simple control logic.
could consume a large percentage of an state-of-the-art FPGA.However, we can first train the NN without any other applica-tions on the chip, and then, with the fixed weights of the first stepobtained, reconfigure the FPGA with the neural network andthe other applications including hard-wired weight values andwithout the learning structures. Moreover, hard-wired weightsimplementation saves a lot of resources versus ROM or RAMweights storage.
Owed to the precision required at the output, the unique op-tion for implementing the sigmoid function of the neuron isa ROM. However, all neurons of each layer share it, reducingdrastically the on-chip memory used. Moreover, due to its sym-metry, it is only necessary to store the positive interval of thesigmoid.
The execution of each layer requires clock cycles,where is the size of the largest layer. The NN has beenpipelined in order to be capable of receiving a new input vectorfor positioning each cycles.
780 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 53, NO. 3, JUNE 2006
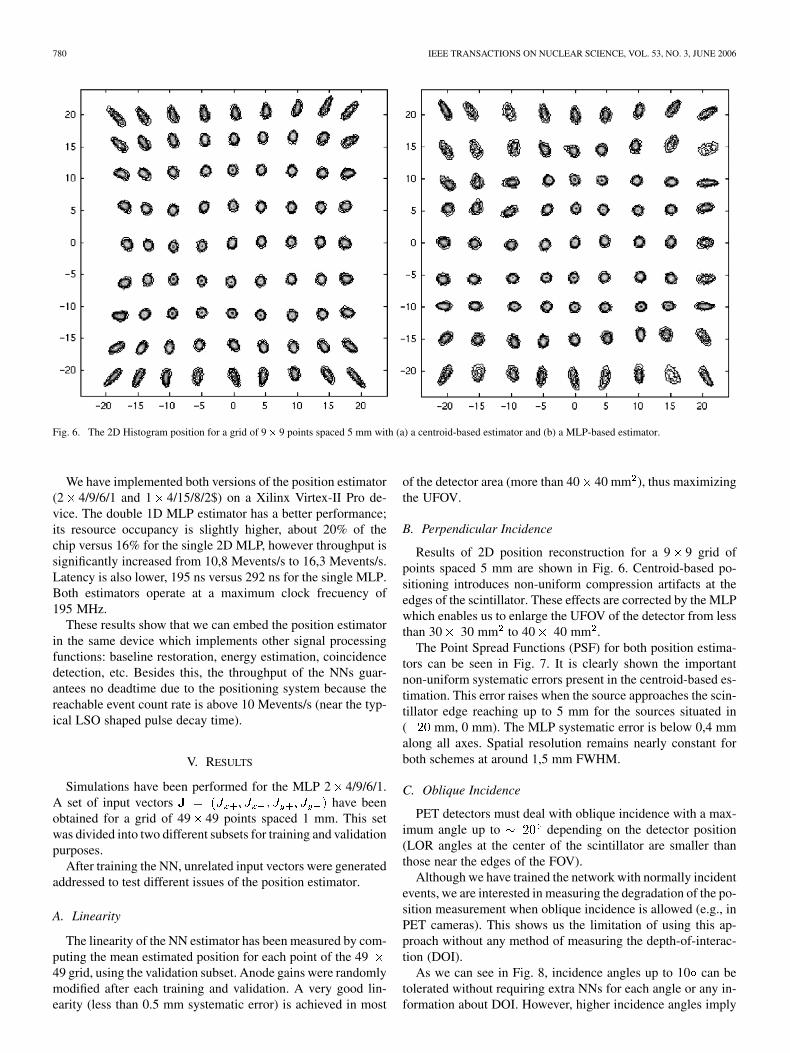
Fig. 6. The 2D Histogram position for a grid of 9� 9 points spaced 5 mm with (a) a centroid-based estimator and (b) a MLP-based estimator.
We have implemented both versions of the position estimator(2 4/9/6/1 and 1 4/15/8/2$) on a Xilinx Virtex-II Pro de-vice. The double 1D MLP estimator has a better performance;its resource occupancy is slightly higher, about 20% of thechip versus 16% for the single 2D MLP, however throughput issignificantly increased from 10,8 Mevents/s to 16,3 Mevents/s.Latency is also lower, 195 ns versus 292 ns for the single MLP.Both estimators operate at a maximum clock frecuency of195 MHz.
These results show that we can embed the position estimatorin the same device which implements other signal processingfunctions: baseline restoration, energy estimation, coincidencedetection, etc. Besides this, the throughput of the NNs guar-antees no deadtime due to the positioning system because thereachable event count rate is above 10 Mevents/s (near the typ-ical LSO shaped pulse decay time).
V. RESULTS
Simulations have been performed for the MLP 2 4/9/6/1.A set of input vectors have beenobtained for a grid of 49 49 points spaced 1 mm. This setwas divided into two different subsets for training and validationpurposes.
After training the NN, unrelated input vectors were generatedaddressed to test different issues of the position estimator.
A. Linearity
The linearity of the NN estimator has been measured by com-puting the mean estimated position for each point of the 4949 grid, using the validation subset. Anode gains were randomlymodified after each training and validation. A very good lin-earity (less than 0.5 mm systematic error) is achieved in most
of the detector area (more than 40 40 mm ), thus maximizingthe UFOV.
B. Perpendicular Incidence
Results of 2D position reconstruction for a 9 9 grid ofpoints spaced 5 mm are shown in Fig. 6. Centroid-based po-sitioning introduces non-uniform compression artifacts at theedges of the scintillator. These effects are corrected by the MLPwhich enables us to enlarge the UFOV of the detector from lessthan 30 30 mm to 40 40 mm .
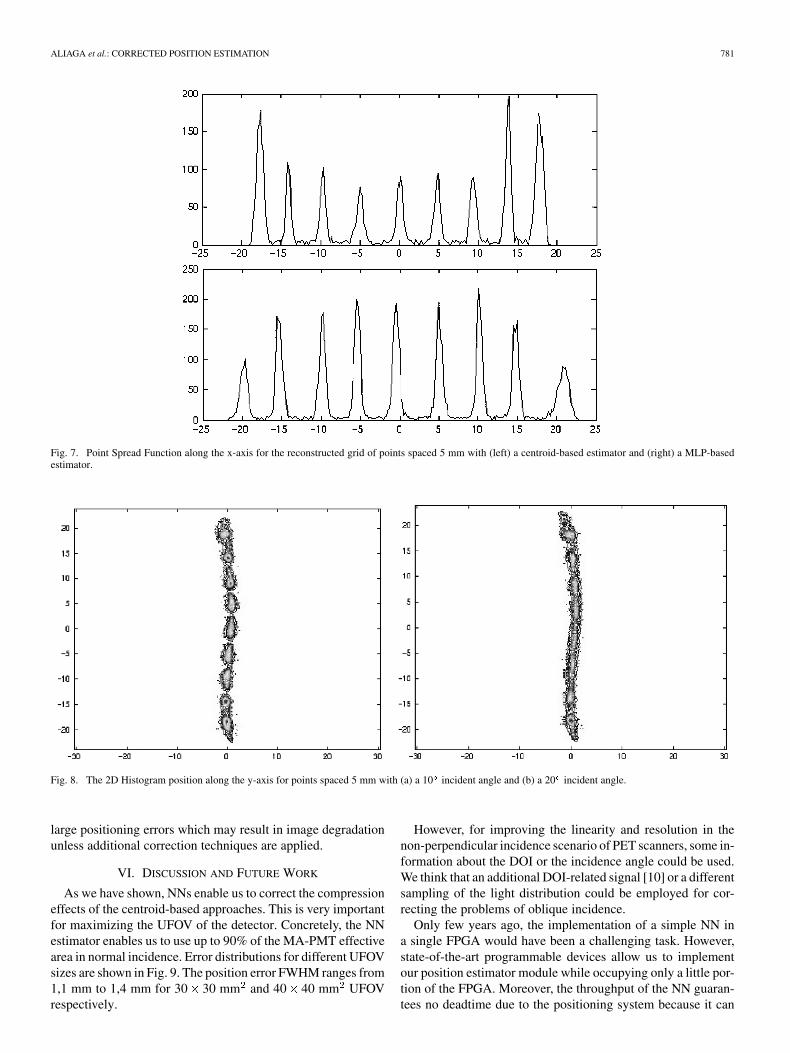
The Point Spread Functions (PSF) for both position estima-tors can be seen in Fig. 7. It is clearly shown the importantnon-uniform systematic errors present in the centroid-based es-timation. This error raises when the source approaches the scin-tillator edge reaching up to 5 mm for the sources situated in( mm, 0 mm). The MLP systematic error is below 0,4 mmalong all axes. Spatial resolution remains nearly constant forboth schemes at around 1,5 mm FWHM.
C. Oblique Incidence
PET detectors must deal with oblique incidence with a max-imum angle up to depending on the detector position(LOR angles at the center of the scintillator are smaller thanthose near the edges of the FOV).
Although we have trained the network with normally incidentevents, we are interested in measuring the degradation of the po-sition measurement when oblique incidence is allowed (e.g., inPET cameras). This shows us the limitation of using this ap-proach without any method of measuring the depth-of-interac-tion (DOI).
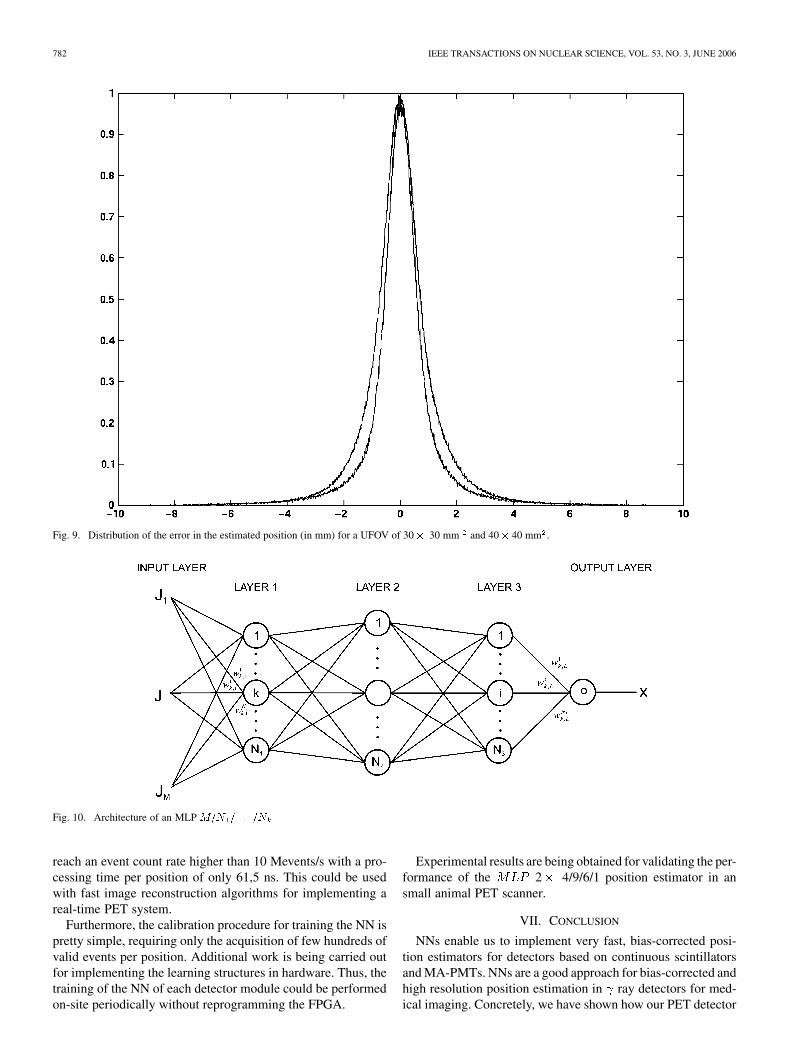
As we can see in Fig. 8, incidence angles up to 10 can betolerated without requiring extra NNs for each angle or any in-formation about DOI. However, higher incidence angles imply
ALIAGA et al.: CORRECTED POSITION ESTIMATION 781
Fig. 7. Point Spread Function along the x-axis for the reconstructed grid of points spaced 5 mm with (left) a centroid-based estimator and (right) a MLP-basedestimator.
Fig. 8. The 2D Histogram position along the y-axis for points spaced 5 mm with (a) a 10 incident angle and (b) a 20 incident angle.
large positioning errors which may result in image degradationunless additional correction techniques are applied.
VI. DISCUSSION AND FUTURE WORK
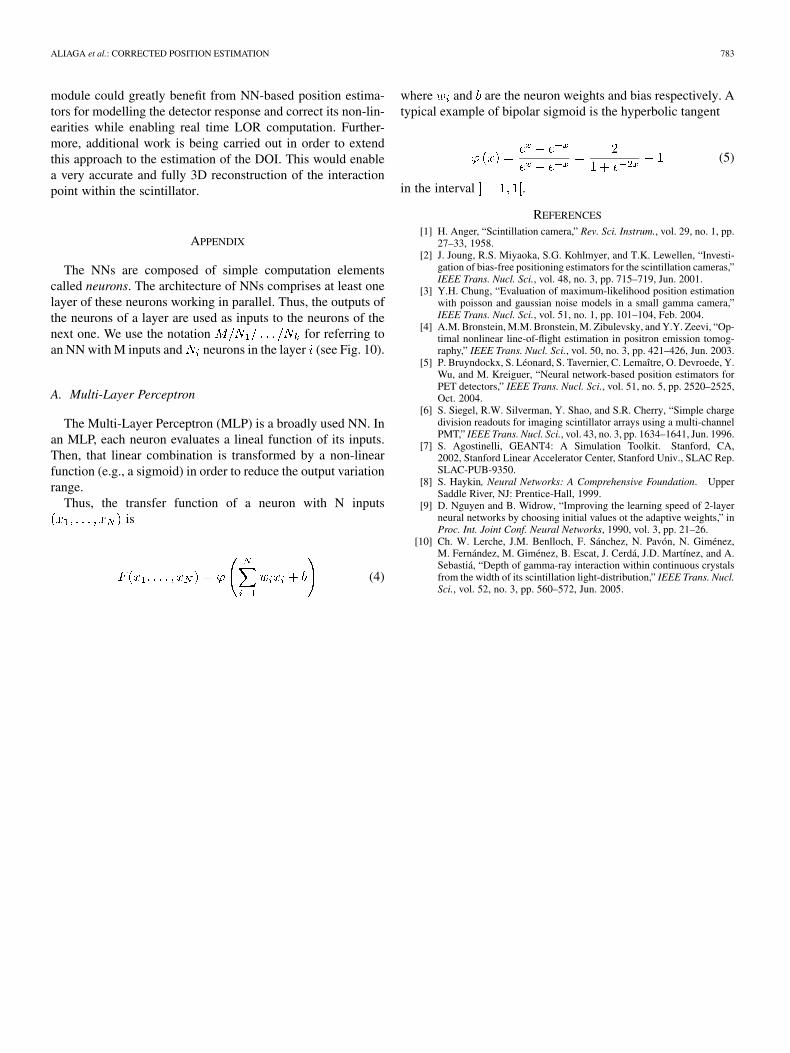
As we have shown, NNs enable us to correct the compressioneffects of the centroid-based approaches. This is very importantfor maximizing the UFOV of the detector. Concretely, the NNestimator enables us to use up to 90% of the MA-PMT effectivearea in normal incidence. Error distributions for different UFOVsizes are shown in Fig. 9. The position error FWHM ranges from1,1 mm to 1,4 mm for 30 30 mm and 40 40 mm UFOVrespectively.
However, for improving the linearity and resolution in thenon-perpendicular incidence scenario of PET scanners, some in-formation about the DOI or the incidence angle could be used.We think that an additional DOI-related signal [10] or a differentsampling of the light distribution could be employed for cor-recting the problems of oblique incidence.
Only few years ago, the implementation of a simple NN ina single FPGA would have been a challenging task. However,state-of-the-art programmable devices allow us to implementour position estimator module while occupying only a little por-tion of the FPGA. Moreover, the throughput of the NN guaran-tees no deadtime due to the positioning system because it can
782 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 53, NO. 3, JUNE 2006
Fig. 9. Distribution of the error in the estimated position (in mm) for a UFOV of 30� 30 mm and 40� 40 mm .
Fig. 10. Architecture of an MLP M=N = . . . =N
reach an event count rate higher than 10 Mevents/s with a pro-cessing time per position of only 61,5 ns. This could be usedwith fast image reconstruction algorithms for implementing areal-time PET system.
Furthermore, the calibration procedure for training the NN ispretty simple, requiring only the acquisition of few hundreds ofvalid events per position. Additional work is being carried outfor implementing the learning structures in hardware. Thus, thetraining of the NN of each detector module could be performedon-site periodically without reprogramming the FPGA.
Experimental results are being obtained for validating the per-formance of the 2 4/9/6/1 position estimator in ansmall animal PET scanner.
VII. CONCLUSION
NNs enable us to implement very fast, bias-corrected posi-tion estimators for detectors based on continuous scintillatorsand MA-PMTs. NNs are a good approach for bias-corrected andhigh resolution position estimation in ray detectors for med-ical imaging. Concretely, we have shown how our PET detector
ALIAGA et al.: CORRECTED POSITION ESTIMATION 783
module could greatly benefit from NN-based position estima-tors for modelling the detector response and correct its non-lin-earities while enabling real time LOR computation. Further-more, additional work is being carried out in order to extendthis approach to the estimation of the DOI. This would enablea very accurate and fully 3D reconstruction of the interactionpoint within the scintillator.
APPENDIX
The NNs are composed of simple computation elementscalled neurons. The architecture of NNs comprises at least onelayer of these neurons working in parallel. Thus, the outputs ofthe neurons of a layer are used as inputs to the neurons of thenext one. We use the notation for referring toan NN with M inputs and neurons in the layer (see Fig. 10).
A. Multi-Layer Perceptron
The Multi-Layer Perceptron (MLP) is a broadly used NN. Inan MLP, each neuron evaluates a lineal function of its inputs.Then, that linear combination is transformed by a non-linearfunction (e.g., a sigmoid) in order to reduce the output variationrange.
Thus, the transfer function of a neuron with N inputsis
(4)
where and are the neuron weights and bias respectively. Atypical example of bipolar sigmoid is the hyperbolic tangent
(5)
in the interval .
REFERENCES
[1] H. Anger, “Scintillation camera,” Rev. Sci. Instrum., vol. 29, no. 1, pp.27–33, 1958.
[2] J. Joung, R.S. Miyaoka, S.G. Kohlmyer, and T.K. Lewellen, “Investi-gation of bias-free positioning estimators for the scintillation cameras,”IEEE Trans. Nucl. Sci., vol. 48, no. 3, pp. 715–719, Jun. 2001.
[3] Y.H. Chung, “Evaluation of maximum-likelihood position estimationwith poisson and gaussian noise models in a small gamma camera,”IEEE Trans. Nucl. Sci., vol. 51, no. 1, pp. 101–104, Feb. 2004.
[4] A.M. Bronstein, M.M. Bronstein, M. Zibulevsky, and Y.Y. Zeevi, “Op-timal nonlinear line-of-flight estimation in positron emission tomog-raphy,” IEEE Trans. Nucl. Sci., vol. 50, no. 3, pp. 421–426, Jun. 2003.
[5] P. Bruyndockx, S. Léonard, S. Tavernier, C. Lemaître, O. Devroede, Y.Wu, and M. Kreiguer, “Neural network-based position estimators forPET detectors,” IEEE Trans. Nucl. Sci., vol. 51, no. 5, pp. 2520–2525,Oct. 2004.
[6] S. Siegel, R.W. Silverman, Y. Shao, and S.R. Cherry, “Simple chargedivision readouts for imaging scintillator arrays using a multi-channelPMT,” IEEE Trans. Nucl. Sci., vol. 43, no. 3, pp. 1634–1641, Jun. 1996.
[7] S. Agostinelli, GEANT4: A Simulation Toolkit. Stanford, CA,2002, Stanford Linear Accelerator Center, Stanford Univ., SLAC Rep.SLAC-PUB-9350.
[8] S. Haykin, Neural Networks: A Comprehensive Foundation. UpperSaddle River, NJ: Prentice-Hall, 1999.
[9] D. Nguyen and B. Widrow, “Improving the learning speed of 2-layerneural networks by choosing initial values ot the adaptive weights,” inProc. Int. Joint Conf. Neural Networks, 1990, vol. 3, pp. 21–26.
[10] Ch. W. Lerche, J.M. Benlloch, F. Sánchez, N. Pavón, N. Giménez,M. Fernández, M. Giménez, B. Escat, J. Cerdá, J.D. Martínez, and A.Sebastiá, “Depth of gamma-ray interaction within continuous crystalsfrom the width of its scintillation light-distribution,” IEEE Trans. Nucl.Sci., vol. 52, no. 3, pp. 560–572, Jun. 2005.