copyright © cisst erc, 2006 nsf engineering research center for computer integrated surgical...
TRANSCRIPT

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
IGT System Engineering
Peter Kazanzides
Assistant Research ProfessorDepartment of Computer Science
Johns Hopkins University
October 19, 2006
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
My Background
1989-1990 Postdoctoral research at IBM on ROBODOC
1990-2002 Co-Founder of Integrated Surgical Systems
– Commercial development of ROBODOC® System
– Commercial sales in Europe (CE Mark)
– Clinical trials in U.S. and Japan
2002-present Research faculty at JHU CISST ERC
– Lead engineering infrastructure
– Develop image-guided robots

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Outline
• What is System Engineering?
• Major activities:– Requirements
– Risk Analysis
– Architecture
– Modeling / Simulation
– Verification and Validation
• Case study: Image-guided robot for rodent research
• Current work: Surgical Assistant Workstation
• Summary
• Three challenges and opportunities for assistanceFour

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
What is System Engineering?
Customer Needs
State the Problem
Investigate Alternatives
Model the system
Integrate Assess Performance
Launch System
Output
Re-evaluate
The Systems Engineering Process from A. T. Bahill and B. Gissing, “Re-evaluating systems engineering concepts using systems thinking”, IEEE Transaction on Systems,
Man and Cybernetics, Part C: Applications and Reviews, 28 (4), 516-527, 1998.
INCOSE: International Council on Systems Engineering (www.incose.org)
Re-evaluate Re-evaluate Re-evaluate Re-evaluate Re-evaluate
• Spans the entire development process• Considers the entire system, including hardware and
software (interdisciplinary)
The SIMILAR Process

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
System Engineering Activities
• Requirements• Risk analysis• Architecture• Modeling / simulation• Verification and Validation
• Level of effort will vary based on factors such as:– University or industry project– Plans for clinical evaluation– Cohesiveness of developers and users
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Requirements
• Informal (undocumented) is fine for early prototypes
• Documented requirements necessary for:– Any system for clinical use– Any development involving multiple/distributed
parties (e.g., university researchers, industry, clinicians)
• Requirements may not be necessary for toolkits
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Risk Analysis
• Should be performed by cross-functional team, including application expert
• Failure Mode Effects (and Criticality) Analysis (FMEA/FMECA)– Bottom up analysis: for each component failure,
determine (potential) system failure– Most useful in design phase (proactive)
• Fault Tree Analysis (FTA)– Top down analysis: trace each system failure
down to components– Most useful for after-the-fact analysis

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Architecture
• Often refers to software, but can include hardware elements
• Simple definition: “What the pieces are and how they work together”
• From Software Engineering Institute (SEI) at CMU:Software architecture is the set of design decisions which, if made incorrectly, may cause your project to be cancelled – Eoin Wood

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Architecture: 4+1 View
From: P. Kruchten, “The 4+1 View Model of Architecture”, IEEE Software, 12(6), Nov 1995.
Other approaches include RM-ODP, Zachman framework

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Modeling and Simulation
• Create models of system to guide development
• Model Driven Architecture (MDA) ®*
– Model is enduring asset– Perform simulation/testing with model– Generate code from model– Is the technology (tool set) there yet?
“Processes, Methodologies, and Tools used for the Development of a Model Driven Architecture Based Open Software Framework for Distributed Medical Devices”, Amen Ra Mashariki, Ph.D. proposal, Morgan State University
*Registered trademark of OMG
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Verification and Validation (V&V)
• NASA SATC: “differences between verification and validation are unimportant except to the theorist”
• Two primary V&V activities:– Reviews (inspections, walkthroughs)– Testing (e.g., against requirements)
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
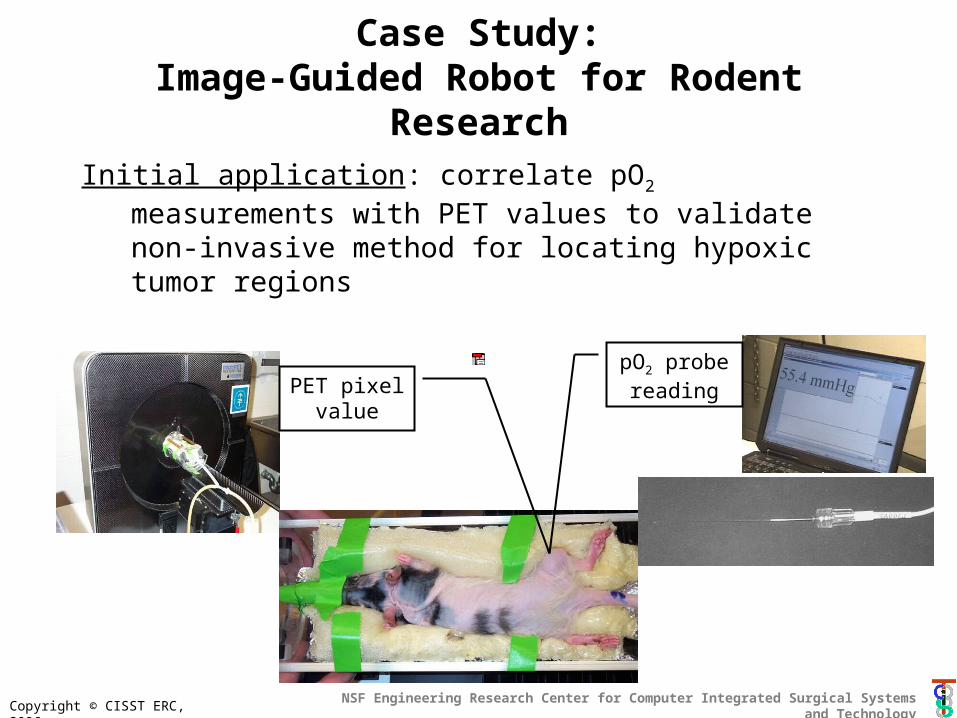
Case Study:Image-Guided Robot for Rodent Research
Initial application: correlate pO2 measurements with PET values to validate non-invasive method for locating hypoxic tumor regions
PET pixel value
pO2 probe reading

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Image-Guided Robot for Rodent Research: Requirements
• Distributed team:– Developers at JHU (Baltimore)– Customers (users) at Memorial Sloan Kettering
Cancer Center (New York City)
• Requirement were critical:– First meeting: Sept 2003– Three major revisions– Final version approved: March 2004– System installed at MSKCC: Jan 2005

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Image-Guided Robot for Rodent Research: Physical Architecture
PC (Windows) Servo Control and Amps (Galil)
DMC-2143 RobotApplication
API
3D SlicerEthernet

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
GUI
Image-Guided Robot for Rodent Research:Development Architecture
vtkRodent
Region Growing
Registration Executable
mskccRobot
Galil driver CISST
3D Slicer
VTKTCL/TK
Interpreter
File I/O
CISST
LAPACK
Ethernet
wxPython
wxWidgets
PythonInterpreter
(IRE)
File I/O
Open source
Proprietary to vendorApplication-specific
Application Environment
Testing Environment
Test Scripts
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
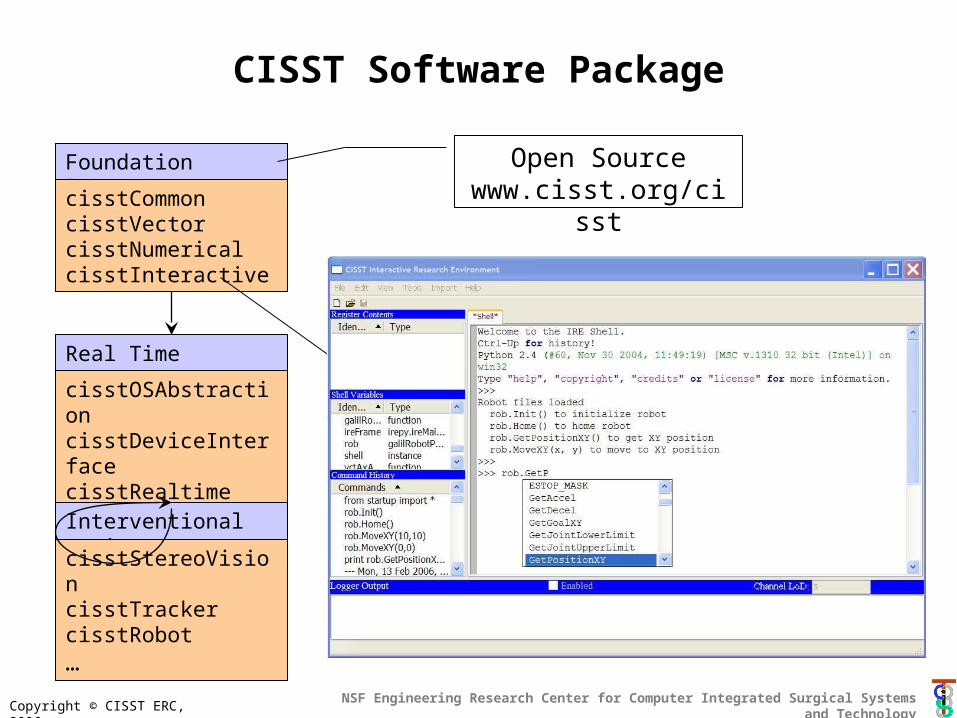
Foundation libraries
cisstCommoncisstVectorcisstNumericalcisstInteractive
Interactive Research Environment (IRE)
CISST Software Package
Real Time Support
cisstOSAbstraction
cisstDeviceInterfacecisstRealtime
Interventional Devices
cisstStereoVisioncisstTrackercisstRobot…
Open Source www.cisst.org/cisst

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Image-Guided Robot for Rodent Research: Verification & Validation
• Well-tested toolkits (Slicer, VTK, CISST,…)• System accuracy tests with phantom:
– PET Fiducial Localization Error: 0.26 mm– Robot Fiducial Localization Error: 0.18 mm– Target Registration Error: 0.29 mm
• Customer acceptance testing
“Design and Validation of an Image-Guided Robot for Small Animal Research,” MICCAI, Copenhagen, Denmark, Oct 2006.
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
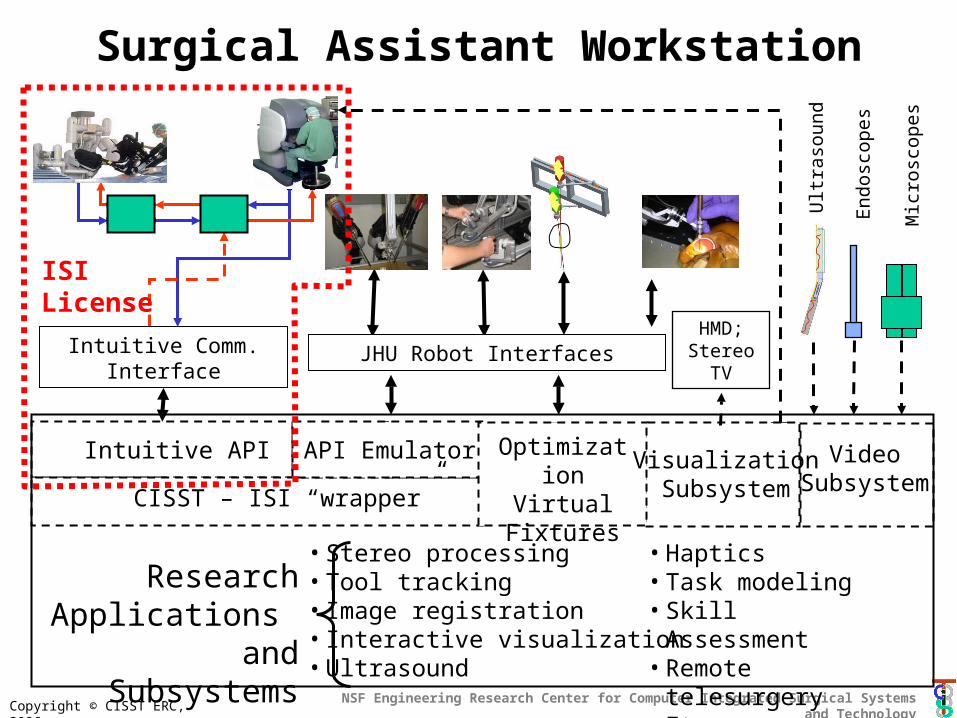
Intuitive API
Intuitive Comm. Interface
JHU Robot Interfaces
API Emulator
CISST – ISI “wrapper”
OptimizationVirtual
Fixtures
VideoSubsystem
VisualizationSubsystem
ResearchApplications
and Subsystems
• Haptics• Task modeling• Skill Assessment• Remote telesurgery• Etc.
• Stereo processing• Tool tracking• Image registration• Interactive visualization• Ultrasound
Ultr
aso
und
End
osco
pes
Mic
rosc
opes
HMD;Stereo
TV
ISI License
Surgical Assistant Workstation
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Surgical Assistant Workstation
• NSF supplement to CISST ERC– Started Sept 2006
• Collaborative effort between JHU and Intuitive Surgical
• Currently working on formal specifications– Functional specification – Architecture views (4+1)
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Summary
• System engineering integrates multiple disciplines over the development life cycle
• Key activities include requirements, modeling, architecture, verification & validation– What’s needed depends on development scenario
• But, there are challenges in all of these activities…
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
DICOM
Interfaces / Middleware
HL7
Input Device(s)
Display(s)
Electronic RecordsAnatomical
Atlas
Patient Database
Real-Time Data Distribution
Intraoperative Imaging (e.g., X-ray, ultrasound,
microscope video)
Image Acquisition
Image Processing
Image Overlay
Trajectory Control
Servo Control
Medical Robot Navigation or Tracking System
Visualization/GUI(Navigation System)
Target Positions
Preoperative Data and Models
DICOM
System Configuration
Procedural Logic(e.g., Task Graph)
Data Logging
Visualization/GUI
Application Controller
Challenge #1: HW and SW for IGT Systems
Preoperative Images

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
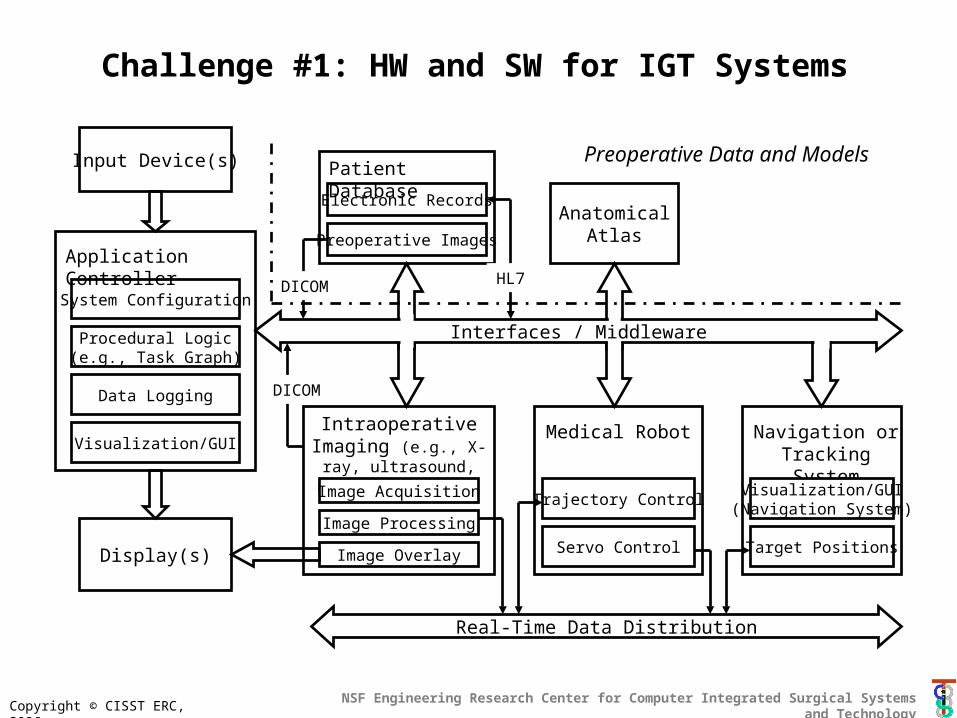
Challenge #1: HW and SW for IGT Systems
• Intraoperative imaging– Hardware exists (X-ray, US, video, …, CT, MRI)– Need better data access (e.g., US RF)
• Navigation/tracking– Hardware exists– Software toolkits recently available– Research interfaces to commercial systems emerging
• Robots– Mostly custom hardware– Software toolkits not yet available– Research interface to daVinci emerging
• Application control / Workflow– Software toolkits available (Slicer, SIGN, IGSTK, …)
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
DICOM
Interfaces / Middleware
HL7
Input Device(s)
Display(s)
Electronic RecordsAnatomical
Atlas
Patient Database
Real-Time Data Distribution
Intraoperative Imaging (e.g., X-ray, ultrasound,
microscope video)
Image Acquisition
Image Processing
Image Overlay
Trajectory Control
Servo Control
Medical Robot Navigation or Tracking System
Visualization/GUI(Navigation System)
Target Positions
Preoperative Data and Models
DICOM
System Configuration
Procedural Logic(e.g., Task Graph)
Data Logging
Visualization/GUI
Application Controller
Challenge #2: Architecture and Interface Standards
Preoperative Images
Standards needed
Standards needed

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
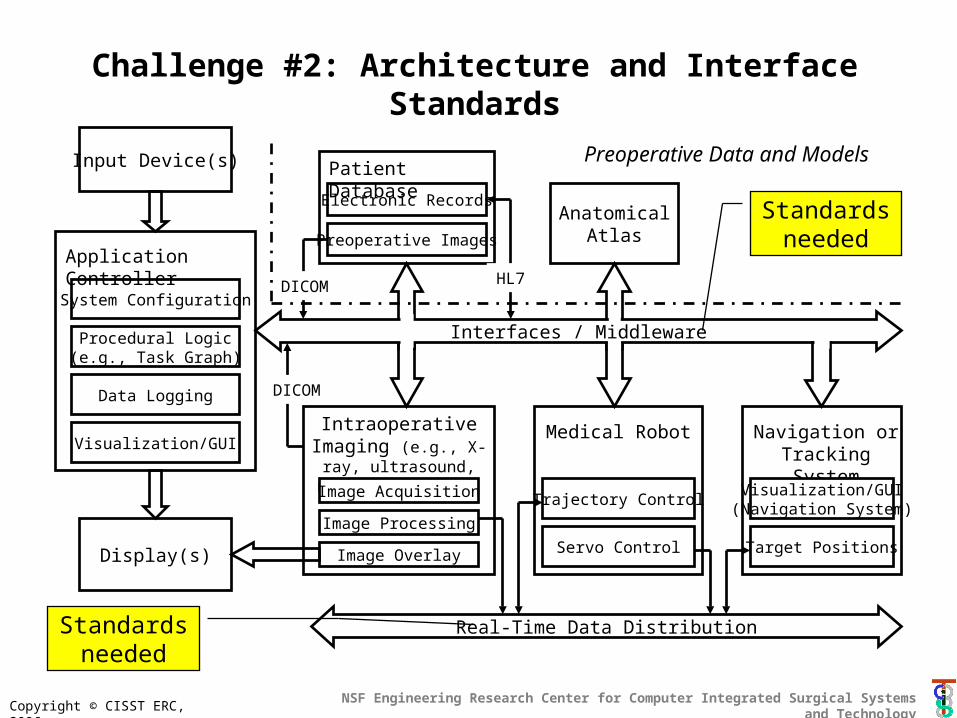
Challenge #2: Architecture and Interface Standards
• Need standards for:– Technical interoperability: delivery of messages/data between
subsystems (e.g., networks, middleware)
– Semantic interoperability: ability to process messages (e.g., common data structures, commands)
• Existing efforts:– DICOM for medical images
– ISO 11073 (IEEE 1073)
– CANOpen
– Medical device plug & play (CIMIT)
• Examples of tracking system interfaces:– SIGN / OpenTracker
– IGSTK / Atamai
– cisstTracker / cisTracker (JHU)
– Orion (Vanderbilt)

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Challenge #3: Tools for modeling, simulation, and testing
• Can we predict system performance before implementation?
• Can we do automated nightly testing of software that interacts with the real world?– Are simulations good enough?

Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
Challenge #4: System engineering in a research environment
• Define a System Engineering process that:– Facilitates clinical translation– Enables efficient interactions with industry– Does not delay the pace of research
Copyright © CISST ERC, 2006NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
How can NCIGT (or ???) help?
1. Support database of IGT hardware and software solutions
2. Promote the development and adoption of standards for IGT
3. Develop realistic modeling and simulation environments for system evaluation and testing
4. Provide guidance documents for performing system engineering