coordination and controlacl.mit.edu/papers/how_ccco.pdfcoordination and control for cooperating...
TRANSCRIPT
Coordination and Control for Cooperating UAV's
Jonathan P. HowMIT
Conference on Cooperative Control and Optimization
November 12-14, 2001
23/11/01 How 2
Objectives• Develop an overall guidance and control architecture
for fleets of cooperating UAV's that:– Performs optimal coordination of the vehicles – Evaluates system performance in real-time– Quickly reconfigures to account for failures or new targets.
• Fleet coordination includes:– Dynamically feasible trajectory optimization– Task assignment– Resource allocation
• Must account for heterogeneous vehicles & “waypoints” with different missions
– Search / reconnaissance– Payload delivery & assessment

23/11/01 How 3
Problem Statement• Vehicles
• Waypoints
• Obstacles
• Capabilities
• Optimize assignments & trajectories to minimizetime to complete overall mission
• Paper presents several solution algorithms.– Enable centralized and distributed coordination architectures
23/11/01 How 4
Encoding Problem Data• Collect assignment and trajectory optimization
problem data in matrix form• Initial states
• Dynamics
• Obstacles
• Targets
• Capabilities
• Time dependencies
M
M
iVmax
ΩM
M
imax
MMMM
MMMM
iiiiyxyx maxmaxminmin
M
M
M
M
jj TT yx
=
otherwise0point can visit vehicle1 jiKK iwiw
OLN
M
M
NLO
ij TT ≥
MMMM
MMMM
ii yxii vvyx

23/11/01 How 5
Basic Approach (MILP)• Approach: Mixed-Integer Linear Programming
– Extension of linear programming (LP) in which some variables take only integer values (0,1)
– Used to include logical statements in LP
• Benefits:– Can include high-level planning decisions directly in
trajectory optimization • Many path-planning problems can be written in MILP format• Directly includes avoidance conditions
– Software available to solve MILP problems – AMPL, CPLEX• Gives direct route to optimal solutions
⇒⇒⇒⇒ Can handle very general fleet guidance problems
• Issues:– Large, centralized computation– All models and constraints must be linearized
23/11/01 How 6
MILP Formulation• Assume linear model of UAV dynamics
– Point mass– Constant altitude ⇒ 2-D problem– Limited speed & force
⇒ Restricted turn rate
• Design maneuvers to give shortest flight time - penalize flight time
• Observation:– Minimum time solution favors max speed– Maximum speed ! turns at the rate limit– Sharper turns still permitted, must check.
max
maxmax
max
max
max
mVfVV
mVfffVV
≤Ω⇒=
≤Ω
≤≤

23/11/01 How 7
Magnitude Limits• Limited speed, force
• Exact constraint form is circle in vector space
– Nonlinear
• Approximate with Nlinear constraints
• Forms N-sided polygon in vector space
maxmax fV ≤≤+=fv
BfAxx&
N=4
N=6
N=8
Max. Error30%
N=4 N=12
23/11/01 How 8
Waypoint Visit Constraints• Logic & implementation
– Choose assignments and ordering consistent with capabilities matrix
• Waypoint must be visited by a capable vehicle– Gray squares
• Each waypoint must be visited exactly once– One in each row
• Binary variable vipw– v = 1 if vehicle p visits
target w at time i
( )( )
L
ipwTip
ipwTip
vMxx
vMxx
w
w
−−≥
−+≤
1
1
1, =∀ ∑∑i p
ipwiwvKw
23/11/01 How 9
Timing Constraints• Vehicle p visits target w at time TVpw
– Zero if vehicle does not visit that waypoint
• Vehicle p finishes at time TFp
• Mission completed at time TC
• Can use this information to include timing dependencies on the waypoint visitation.
∑ ⋅=∀∀i
ipwpw viTVpw ,,
pwp TVTFw ≥∀ ,
pTFTCp ≥∀ ,
23/11/01 How 10
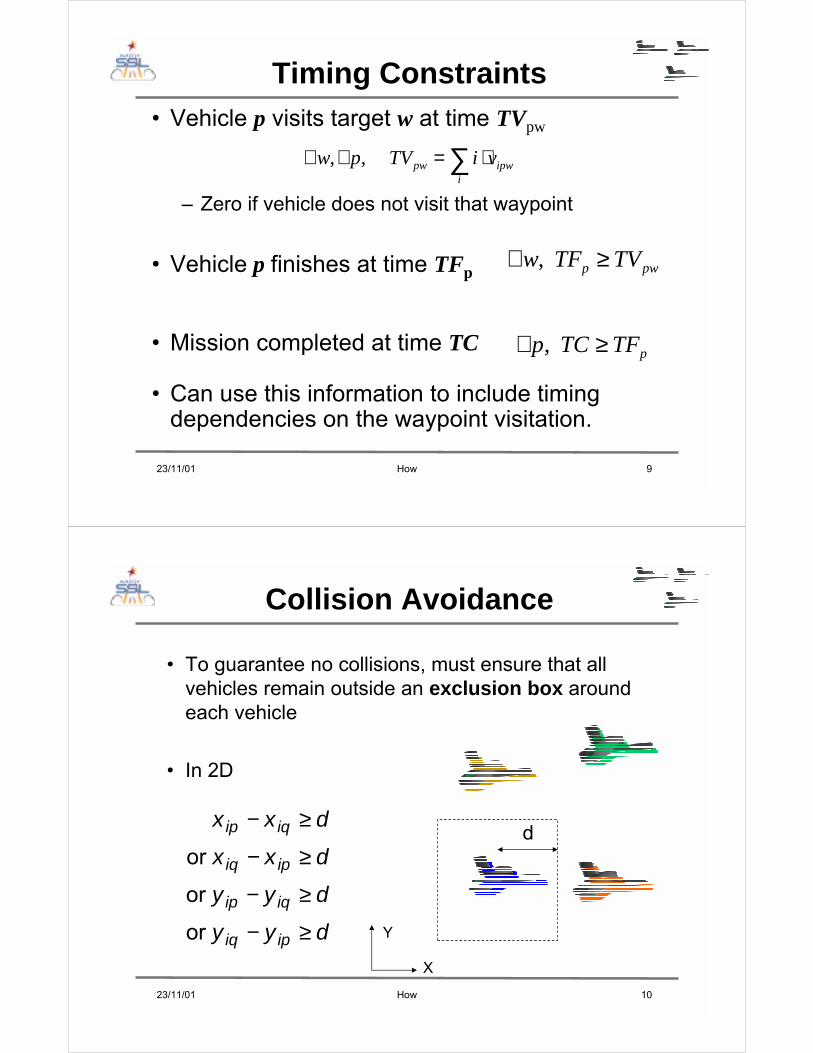
Collision Avoidance
• To guarantee no collisions, must ensure that all vehicles remain outside an exclusion box around each vehicle
• In 2D
x x dx x d
y y dy y d
ip iq
iq ip
ip iq
iq ip
− ≥
− ≥
− ≥
− ≥
or or or
X
Y
d

23/11/01 How 11
x x d Mb
x x d Mb
y y d Mb
y y d Mb
b
ip iq ipq
iq ip ipq
ip iq ipq
iq ip ipq
ipqkk
− ≥ −
− ≥ −
− ≥ −
− ≥ −
≤=
∑
1
2
3
4
1
43
and and and
and
Collision Avoidance as MILP• Convert ‘OR’ group to
‘AND’ group using binary variables
• bipqk either 0 or 1– b = 0 : constraint stands– b = 1 : relaxed
• M very large constant
• Schouwenaars et al. (ECC01)
Ensures at least 1 ‘or’ constraint holds
23/11/01 How 12
Optimization Objective
• Minimize overall completion time TC• Small α,β ensure unique solution exists
– Smooth trajectories from discretized limits• Subject to:
– Dynamics model– Visiting logic– Timing – Collision avoidance
∑∑ ++
pi
ipp
p
TCTFTV
TFTC,,,,
,,,)(min f
vbfxβα

23/11/01 How 13
Aircraft Model Validation
• Remains near max speed
• Single aircraft• A → B avoiding obstacles
–Blue: high turn rate–Red: low turn rate–Same speed
• Obeys turn rate limit ‘Turn-straight-turn’
AB
V ΩΩΩΩ
23/11/01 How 14
• Vehicle cannot visit target A
• Completion in 22 steps
Assignment Validation• Effect of Constraints
• 2 vehicles• 4 targets• All capabilities• Completion in 18 steps
A

23/11/01 How 15
• Add further constraints
• Target B must be visited before C
• Vehicle moves slowly• Completion in 27 steps
Assignment Validation II
B
C
• Added obstacle• Completion in 30
steps
B
C AA
23/11/01 How 16
Approximate Calculation Procedure
Compute all possible permutations & downselect
Find vehicle’s lowest cost paths to perform each feasible permutation
Optimal waypoint assignment
Calculate vehicle trajectories to visit waypoints in optimal order
Collision avoidance
Can be distributed
Centralized
Can bedistributed
Centralized
Centralized

23/11/01 How 17
Distributed Calculation
Compute all possible permutations & downselect
Optimal waypoint assignment
Collision avoidance
CostCalc #1
CostCalc #2
CostCalc #n-1
CostCalc #n
Trajectorydesign #1
Trajectorydesign #2
Trajectorydesign #n-1
Trajectorydesign #n
…
…
23/11/01 How 18
• Computationally efficient algorithm for finding costs
•Visibility graph: Which pairs of nodes can be connected without penetrating obstacles?
•Shortest paths: What are shortest paths between all pairs of waypoints?
Computing Cost Data• Assignment requires cost for all possible scenarios.
– With m waypoints and n vehicles, n (mP1 + mP2 + … + mPm) distinct sequences of starting points and waypoints.
• Computing cost values is the computationally demanding part of the assignment problem.
Obstacle fieldVisibility graphShortest paths between waypoints
23/11/01 How 19
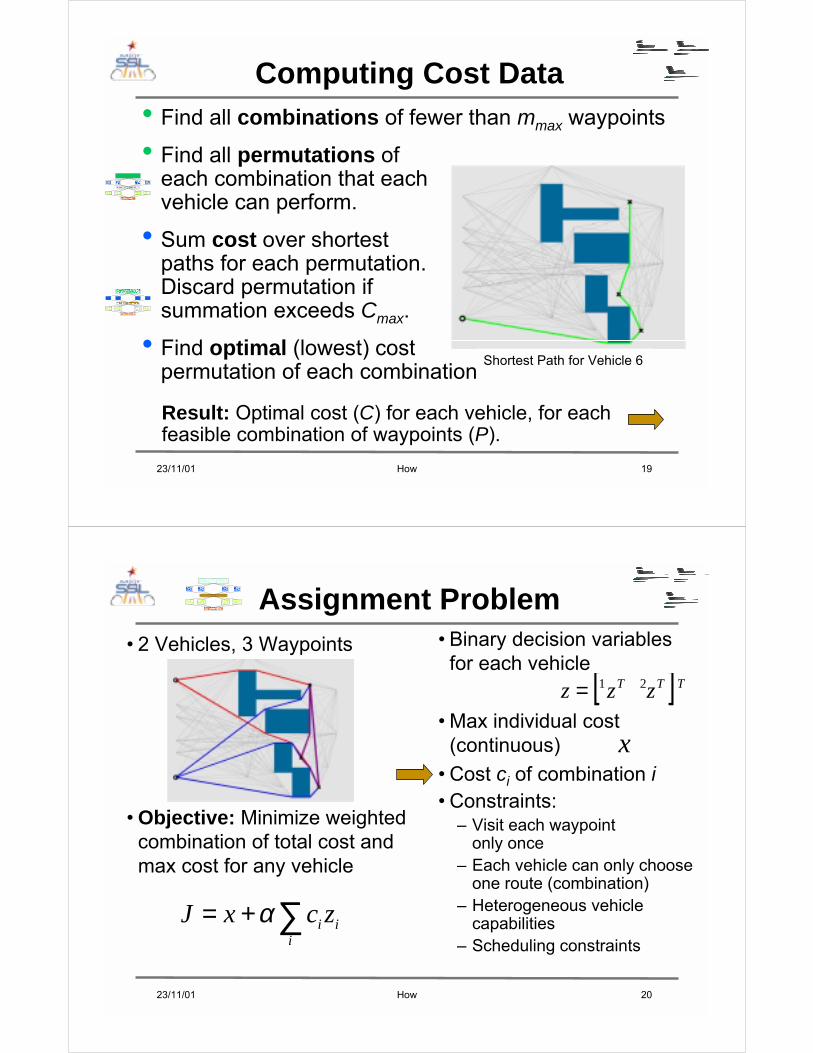
Shortest paths between combination of 3 waypointsShortest Path for Vehicle 1
Computing Cost Data• Find all combinations of fewer than mmax waypoints
• Find all permutations of each combination that eachvehicle can perform.
• Sum cost over shortest paths for each permutation. Discard permutation if summation exceeds Cmax.
• Find optimal (lowest) cost permutation of each combination.
Result: Optimal cost (C) for each vehicle, for each feasible combination of waypoints (P).
Shortest Path for Vehicle 6
23/11/01 How 20
Assignment Problem• 2 Vehicles, 3 Waypoints
• Objective: Minimize weighted combination of total cost and max cost for any vehicle
• Binary decision variables for each vehicle
• Max individual cost (continuous)
• Cost ci of combination i• Constraints:
– Visit each waypoint only once
– Each vehicle can only choose one route (combination)
– Heterogeneous vehicle capabilities
– Scheduling constraints∑+=
iii zcxJ α
[ ] 21 TTT zzz =
x

23/11/01 How 21
(2) Visit waypoint only once
(3) Max cost ≥ max individual cost
Assignment Problem
=
101011
101111
100010001
L
L
L
L
L
L
P
Veh 1 n Combinations
Veh 2 m Comb’s
s WP'3,2,1 1 =∀=∑+
izPmn
jjij
sVeh' 2,1 =∀≤∑+
ixzCmn
jjij
• Combination matrix Pij
– 1 if waypoint i visited in combination j
– 0 if not• Cost matrix Cij
–Cost for vehicle i to perform combination j
–0 if vehicle i cannot execute combination j
" WP 1" WP 2" WP 3
=
m
,n,
cccc
C,21,2
111 0
00
0 L
L
L
L " Veh 1" Veh 2
11 =∑n
jjz 12 =∑
m
jjz
• Constraints(1) Choose only 1 combination
23/11/01 How 22
Trajectory Design• Assignment known, but still need trajectory
commands for vehicles⇒⇒⇒⇒ Use MILP to design feasible paths for vehicle
dynamics
• Design paths to prevent collisions– Could solve as centralized, fixed target MILP– Collisions unlikely in sparse problems⇒⇒⇒⇒ Distribute trajectory planning and check results– Redesign only those paths which collide

23/11/01 How 23
Solution Comparison
Optimal solution with approximate costs
Globally optimal solution with full MILP formulation
23/11/01 How 24
Larger Problem

23/11/01 How 25
Got MILP?• MILP can be used to solve many problems associated
with vehicle path-planning and fleet management
– Gives the global optimal solution subject to the linearity assumptions
– Centralized calculation
• Cost calculations for the assignment problem are most computational intensive part
– Developed techniques to approximate the costs calculation and distribute cost calculations.
• Algorithms can be used to support centralized and decentralized coordination architectures
– Further analysis required to investigate communication and computational trade-offs