convection in ice i with non-newtonian rheology ... · convection in ice i with non-newtonian...
TRANSCRIPT

Convection in Ice I With Non-Newtonian
Rheology: Application to the Icy Galilean
Satellites
by
Amy Courtright Barr
B.S., California Institute of Technology, 2000
M.S., University of Colorado, 2002
A thesis submitted to the
Faculty of the Graduate School of the
University of Colorado in partial fulfillment
of the requirements for the degree of
Doctor of Philosophy
Geophysics Graduate Program
Department of Astrophysical and Planetary Sciences
2004

This thesis entitled:Convection in Ice I With Non-Newtonian Rheology: Application to the Icy Galilean
Satelliteswritten by Amy Courtright Barr
has been approved for the Geophysics Graduate ProgramDepartment of Astrophysical and Planetary Sciences
Robert T. Pappalardo
Dr. Robert Grimm
Dr. Bruce Jakosky
Dr. John Wahr
Dr. Shijie Zhong
Date
The final copy of this thesis has been examined by the signatories, and we find thatboth the content and the form meet acceptable presentation standards of scholarly
work in the above mentioned discipline.

iii
Barr, Amy Courtright (Ph. D, Geophysics)
Convection in Ice I With Non-Newtonian Rheology: Application to the Icy Galilean
Satellites
Thesis directed by Prof. Robert T. Pappalardo
Observations from the Galileo spacecraft suggest that the Jovian icy satellites
Europa, Ganymede, and Callisto have liquid water oceans beneath their icy surfaces.
The outer ice I shells of the satellites represent a barrier between their surfaces and their
oceans and serve to decouple fluid motions in their deep interiors from their surfaces.
Understanding heat and mass transport by convection within the outer ice I shells of
the satellites is crucial to understanding their geophysical and astrobiological evolution.
Recent laboratory experiments suggest that deformation in ice I is accommodated
by several different creep mechanisms. Newtonian deformation creep accommodates
strain in warm ice with small grain sizes. However, deformation in ice with larger
grain sizes is controlled by grain-size-sensitive and dislocation creep, which are non-
Newtonian. Previous studies of convection have not considered this complex rheological
behavior.
This thesis revisits basic geophysical questions regarding heat and mass trans-
port in the ice I shells of the satellites using a composite Newtonian/non-Newtonian
rheology for ice I. The composite rheology is implemented in a numerical convection
model developed for Earth’s mantle to study the behavior of an ice I shell during the
onset of convection and in the stagnant lid convection regime. The conditions required
to trigger convection in a conductive ice I shell depend on the grain size of the ice, and
the amplitude and wavelength of temperature perturbation issued to the ice shell.
If convection occurs, the efficiency of heat and mass transport is dependent on
the ice grain size as well. If convection occurs, fluid motions in the ice shells enhance the

iv
nutrient flux delivered to their oceans, and coupled with resurfacing events, may provide
a sustainable biogeochemical cycle. The results of this thesis suggest that evolution of
ice grain size in the satellites and the details of how tidal dissipation perturbs the ice
shell to trigger convection are required to judge whether convection can begin in the
satellites, and controls the efficiency of convection.

Dedication
For Bernice Pedersen Courtright and Alberta Engvall Siegel

vi
Acknowledgements
I would like to thank Bob Pappalardo for sharing his excellence and creativity
with me for four years. The motivation for this thesis stems from a conversation with
Dave Stevenson that occurred when I was a freshman at Caltech. Shijie Zhong and his
post-docs Jeroen Van Hunen and Allen McNamara helped me turn my pile of ideas into
numerically tractable projects. Bill McKinnon, Don Blankenship, Francis Nimmo, and
Bill Moore have repeatedly raised the bar for success by asking tough questions and
listening patiently as I stammered out the answers.
I would not have made it through grad school without an incredible support
network of friends, family, and faculty members. The core of this network is Bernadine
Barr, who served both as mother and seasoned academic advisor. Thanks to the faculty
at CU, especially Fran Bagenal, Jim Green, Bruce Jakosky, Mike Shull, and John Wahr.
Special thanks to Louise Prockter, Geoff Collins, and Jeff Moore, for providing assurance
that there will be life after grad school. Thanks to Erika Barth, David Brain, Shawn
Brooks, G. Wesley Patterson, James Roberts, Andrew Steffl, Dimitri Veras, and Arwen
Vidal. Thanks to my γδβγ-friends Catherine Boone, Kjerstin Easton, Sarah (DEI)
Milkovich, Brian Platt, David (this is all his fault) Tytell, Travis Williams, and Adrianne
and Yifan Yang.
Support for this work was provided by NASA Graduate Student Researchers
Program grant NGT5-50337 and NASA Exobiology grant NCC2-1340.

vii
Contents
Chapter
1 Introduction 1
1.1 Questions Addressed in this Thesis . . . . . . . . . . . . . . . . . . . . . 3
1.2 Geological and Geophysical Setting . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Basic Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.3 Tidal Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3 Astrobiological Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4 Rheology of Ice I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5 Convection in Ice I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.5.1 Governing Equations . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.5.2 Non-Dimensional Coordinates . . . . . . . . . . . . . . . . . . . . 26
1.5.3 Viscosity Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.5.4 Composite Rheology for Ice I . . . . . . . . . . . . . . . . . . . . 29
1.6 The Onset of Convection . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.6.1 Linear Stability Analysis . . . . . . . . . . . . . . . . . . . . . . . 33
1.6.2 Non-Newtonian Rheologies . . . . . . . . . . . . . . . . . . . . . 34
1.7 Previous Studies of Convection in the Icy Satellites . . . . . . . . . . . . 36

viii
2 Convective Instability in Ice I with Non-Newtonian Rheology 39
2.1 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.3.1 Numerical Implementation of Ice I Rheology . . . . . . . . . . . 43
2.3.2 Numerical Convection Model . . . . . . . . . . . . . . . . . . . . 46
2.3.3 Initial Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.4 Model Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.4.1 Critical Rayleigh Number . . . . . . . . . . . . . . . . . . . . . . 50
2.4.2 Critical Shell Thickness . . . . . . . . . . . . . . . . . . . . . . . 59
2.4.3 Variation of Melting Temperature . . . . . . . . . . . . . . . . . 59
2.5 Comparison to Existing Studies . . . . . . . . . . . . . . . . . . . . . . . 60
2.6 Implications for the Icy Galilean Satellites . . . . . . . . . . . . . . . . . 65
2.6.1 Conditions for Convection in Callisto and Ganymede . . . . . . . 66
2.6.2 Conditions for Convection in Europa . . . . . . . . . . . . . . . . 71
2.7 Discussion: The Role of Tidal Dissipation . . . . . . . . . . . . . . . . . 73
2.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3 Onset of Convection in Ice I with Composite Newtonian and Non-Newtonian
Rheology 78
3.1 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.3.1 Numerical Implementation of Composite Rheology for Ice I . . . 80
3.3.2 Numerical Convection Model . . . . . . . . . . . . . . . . . . . . 84
3.3.3 Initial Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90

ix
3.5 Implications for the Icy Galilean Satellites . . . . . . . . . . . . . . . . . 100
3.5.1 Conditions for Convection in Europa . . . . . . . . . . . . . . . . 101
3.5.2 Conditions for Convection in Ganymede and Callisto . . . . . . . 103
3.5.3 Role of Tidal Heating . . . . . . . . . . . . . . . . . . . . . . . . 103
3.5.4 Evolution of Grain Size and Orientation . . . . . . . . . . . . . . 106
3.6 Summary and Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4 Implications for the Internal Structure of the Major Satellites of the Outer Plan-
ets 110
4.1 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.3 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.3.1 Numerical Implementation of Ice Rheology . . . . . . . . . . . . 111
4.3.2 Numerical Convection Model . . . . . . . . . . . . . . . . . . . . 113
4.3.3 Initial Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.4 Thermodynamic Stability of Oceans . . . . . . . . . . . . . . . . . . . . 114
4.4.1 Critical Rayleigh Number . . . . . . . . . . . . . . . . . . . . . . 115
4.4.2 Efficiency of Convection . . . . . . . . . . . . . . . . . . . . . . . 115
4.4.3 Ocean Stability Without Tidal Heating . . . . . . . . . . . . . . 119
4.4.4 Presence of Non-Water-Ice Materials . . . . . . . . . . . . . . . . 120
4.4.5 Tidal Dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
5 Implications for Astrobiology 128
5.1 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.3 Astrobiological Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.4 Onset of Convection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133

x
5.5 Convective Recycling of the Ice Shell . . . . . . . . . . . . . . . . . . . . 138
5.5.1 Geophysical Descriptive Parameters . . . . . . . . . . . . . . . . 139
5.5.2 Astrobiologically Relevant Parameters . . . . . . . . . . . . . . . 140
5.6 Endogenic Resurfacing Events on Europa . . . . . . . . . . . . . . . . . 149
5.6.1 Domes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.6.2 Ridges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
5.7 Ocean Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
5.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6 Conclusions and Future Work 155
6.1 Answers to the Key Questions . . . . . . . . . . . . . . . . . . . . . . . . 155
6.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.2.1 Grain Size Evolution . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.2.2 Tidal Dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
6.2.3 Premelting in Ice . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
6.3 Synthesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Bibliography 179
Appendix
A Thermal, Physical, and Rheological Parameters 186
B Selected Input Parameters 189

xi
Tables
Table
2.1 Variation in critical Rayleigh number with perturbation amplitude . . . 55
2.2 Numerically determined fitting coefficients for Racr . . . . . . . . . . . . 59
2.3 Comparison to analysis of Solomatov (1995) . . . . . . . . . . . . . . . . 62
4.1 Convective heat flux and Nu for 20 km < D < 100 km . . . . . . . . . . 118
4.2 Orbital parameters for Ganymede and Europa . . . . . . . . . . . . . . . 125
6.1 Rheological parameters for T∼ Tm from Goldsby and Kohlstedt (2001) . 169
A.1 Thermal and physical parameters of the satellites . . . . . . . . . . . . . 187
A.2 Rheological parameters, after Goldsby and Kohlstedt (2001) . . . . . . . 188
B.1 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with GBS rheology . . . . . . . . . . . 190
B.2 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with GBS rheology (continued) . . . . 191
B.3 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with basal slip rheology . . . . . . . . 192
B.4 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with basal slip rheology (continued) . 193

xii
B.5 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with composite rheology . . . . . . . . 194
B.6 Selected input parameters for simulations used to determine the critical
Rayleigh number and wavelength with composite rheology (continued) . 195
B.7 Weighting values for the composite rheology of ice I . . . . . . . . . . . 196
B.8 Input parameters used in Chapters 4 and 5 . . . . . . . . . . . . . . . . 197
B.9 Input parameters used in Chapters 4 and 5 (continued) . . . . . . . . . 198

xiii
Figures
Figure
1.1 The Galilean satellites of Jupiter . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Phase diagram of water . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Interiors of the icy Galliean satellites . . . . . . . . . . . . . . . . . . . . 6
1.4 High resolution image of a double ridge on the surface of Europa . . . . 9
1.5 Pits, spots, and domes on the surface of Europa . . . . . . . . . . . . . . 10
1.6 Chaos terrain on Europa . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.7 Grooved terrain on Ganymede . . . . . . . . . . . . . . . . . . . . . . . . 13
1.8 Conceptual diagrams of deformation mechanisms in ice I . . . . . . . . . 20
1.9 Initial temperature perturbation issued to the ice shell . . . . . . . . . . 25
2.1 Onset of convection in ice I with basal slip rheology . . . . . . . . . . . 51
2.2 Evolution of kinetic energy with time . . . . . . . . . . . . . . . . . . . . 52
2.3 Critical Rayleigh number as a function of wavelength . . . . . . . . . . . 54
2.4 Critical Rayleigh number as a function of perturbation amplitude . . . . 56
2.5 Asymptotic and power law regimes . . . . . . . . . . . . . . . . . . . . . 57
2.6 Comparison of Raa to values from Solomatov (1995) . . . . . . . . . . . 64
2.7 Critical ice shell thickness for convection in Callisto . . . . . . . . . . . . 67
2.8 Critical ice shell thickness for convection in Ganymede . . . . . . . . . . 68
2.9 Critical grain size for convection in Callisto . . . . . . . . . . . . . . . . 69

xiv
2.10 Critical grain size for convection in Ganymede . . . . . . . . . . . . . . . 70
2.11 Critical ice shell thickness for convection in Europa . . . . . . . . . . . . 72
2.12 Critical grain size for convection in Europa . . . . . . . . . . . . . . . . 74
3.1 Deformation maps for ice I . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.2 Composite viscosity of ice I as a function of stress . . . . . . . . . . . . 85
3.3 Determination of Racr for convection in ice I with d = 3.0 cm . . . . . . 91
3.4 Temperature and viscosity fields for convection in ice I with composite
rheology and d = 3.0 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.5 Example of determination of λcr for ice with composite rheology . . . . 94
3.6 Variation of Racr with perturbation amplitude . . . . . . . . . . . . . . 95
3.7 Variation in Racr,0 as a function of grain size . . . . . . . . . . . . . . . 96
3.8 Activation of non-Newtonian creep mechanisms in ice with 0.1 mm < d <
1.0 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.9 Activation of non-Newtonian creep mechanisms in ice with 1.0 cm < d <
3.0 cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
3.10 Critical shell thickness for convection in Newtonian and non-Newtonian
ice I: Europa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.11 Critical shell thickness for convection in Newtonian and non-Newtonian
ice I: Ganymede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.12 Critical shell thickness for convection in Newtonian and non-Newtonian
ice I: Callisto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.1 Convective parameter space explored . . . . . . . . . . . . . . . . . . . . 116
4.2 Variation in convective and conductive heat flux with ice shell thickness
and grain size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.1 Geophysical processes relevant to astrobiology in the Galilean satellites . 132

xv
5.2 Critical wavelength for convection in ice I with composite rheology . . . 136
5.3 Critical shell thickness for convection with composite rheology . . . . . . 137
5.4 Convective parameter space explored . . . . . . . . . . . . . . . . . . . . 141
5.5 Convection in an ice shell 85 km thick with composite rheology and d=0.3
mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.6 Convection in an ice shell 85 km thick with composite rheology and d=30
mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.7 Calculation of interior temperature, stagnant lid thickness, and mass flux 144
5.8 Variation in stagnant lid thickness with grain size . . . . . . . . . . . . . 145
5.9 Mass flux delivered to the stagnant lid . . . . . . . . . . . . . . . . . . . 147
5.10 Recycling time scale for the convecting sublayer of the ice shell . . . . . 148
5.11 Dynamic topography due to convection on Europa . . . . . . . . . . . . 151
6.1 Deformation maps for ice I with high temperature creep enhancement
(d =0.1 mm and d =1 mm) . . . . . . . . . . . . . . . . . . . . . . . . . 171
6.2 Deformation maps for ice I with high temperature creep enhancement
(d =1 cm and d =10 cm) . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
6.3 Composite viscosity for ice as a function of stress with high-temperature
softening . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
6.4 Composite viscosity for ice as a function of temperature with high-temperature
softening . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174

Chapter 1
Introduction
Observations of the Jovian satellites Europa, Ganymede, and Callisto (Figure
1.1) obtained by the Galileo spacecraft suggest that these satellites harbor liquid wa-
ter oceans beneath their icy surfaces. These internal oceans can potentially provide
habitats for life, and they serve to decouple fluid motions in the deep interiors of the
satellites from their surfaces. Icy satellites with ice-covered water oceans are fundamen-
tally different from terrestrial planets, whose surfaces can be hospitable to life and can
record the history of their interior evolution.
Although icy satellites are likely as geophysically complex as terrestrial planets,
models the geodynamics of the satellites are not as sophisticated as terrestrial models,
and, thus, have limited success in reproducing the observed properties of the satellites.
Uncertainties in the rheology of ice, the composition of the satellites, and the thickness of
the ice shells have hampered efforts to judge whether their outer ice I layers can convect.
If convection occurs, the conditions that lead to coupling of convective motion in the ice
I shell to the lithosphere to drive endogenic resurfacing are not well understood. This
thesis represents a major step toward increasing the complexity and validity of models
of convection in the outer ice shells of the satellites by investigating the geophysical
and astrobiological consequences of convection in ice I with a composite stress- and
temperature-dependent rheology.

2
Figure 1.1: The Galilean satellites of Jupiter: Io, Europa, Ganymede, and Callisto.Modified from image PIA01400 from the NASA Planetary Photojournal.

3
1.1 Questions Addressed in this Thesis
This thesis is divided into six chapters. The introductory chapter summarizes
background material relevant to the study the geophysical and astrobiological conse-
quences of convection in the outer ice shells of Europa, Ganymede, and Callisto. Some
background materials are repeated in each individual chapter, to permit each chapter
to stand alone.
Chapters 2 through 5 address the following key questions:
Chapter 2: What are the conditions required to initiate convection in an initially conductive
ice I shell with a non-Newtonian rheology?
Chapter 3: How do the conditions required to trigger convection in an ice I shell change if
a composite Newtonian and non-Newtonian rheology for ice I is used?
Chapter 4: Given a composite rheology for ice I, are oceans beneath a layer of ice I ther-
modynamically stable against heat transport by convection and conduction?
Chapter 5: Does convection play a role in enhancing the habitability of the internal oceans
of the icy satellites?
Chapter 6 is a synthesis of the material contained in this thesis. It answers the key
questions posed above, and discusses avenues of future work to build upon the work in
this thesis.
1.2 Geological and Geophysical Setting
1.2.1 Basic Properties
Large icy satellites are fundamentally different from terrestrial planets. The sur-
faces and deep interiors of the satellites are decoupled by the presence of a liquid water
ocean. Liquid water oceans sandwiched between layers of solid ice are gravitationally

4
Figure 1.2: Phase diagram for water ice, and associated densities in g cm−3 after Durhamet al. (1997). L stands for liquid water.

5
stable within the satellites because the density of liquid water is intermediate between
the densities of ice I and the higher density polymorphs (Figure 1.2).
Jupiter’s satellite Europa has a radius of 1561 km, the outer ∼ 170 km of which
consists of H2O-rich material (Anderson et al., 1998). Measurements from the Galileo
magnetometer show that Europa behaves as a conductor in the presence of the Jovian
magnetic field, indicating that a global layer of conductive liquid, most likely water, lies
beneath its icy surface (Zimmer et al., 2000) (Figure 1.3). Due to its orbital resonance
with Io and Ganymede, Europa has an eccentric orbit around Jupiter and thus expe-
riences a time-varying tidal force on its surface and dissipation of orbital energy in its
interior.
Gravity data suggest that Ganymede, with a radius of 2631 km, is differentiated
into an ice mantle approximately 900 km thick, a rocky core ∼ 400 to 1300 km thick,
and an iron inner core with a radius between 400 to 1300 km (Anderson et al., 1996)
(Figure 1.3). Galileo magnetometer measurements show that Ganymede has a complex
magnetic field that is the sum of a permanent dipole field and a small contribution to the
total magnetic field from Ganymede’s inductive response to the Jovian magnetosphere
(Kivelson et al., 2002). Like Europa, the inductive response of Ganymede suggests the
presence of a liquid water ocean in its interior, likely near the depth where the melting
point of water ice is minimized, approximately 160 km (Kivelson et al., 2002). Calcu-
lations of the orbital evolution of the Galilean satellite system over time performed by
Showman and Malhotra (1997) suggest that Ganymede may have experienced increased
tidal dissipation as it passed through orbital resonances with other satellites, which may
have resulted in increased melting in Ganymede’s interior.
Jupiter’s third icy satellite, Callisto, is roughly the same size as Ganymede, with
a radius of 2403 km. Callisto has roughly the same mean density as Ganymede, but
shows little evidence of endogenic resurfacing (Moore et al., 2004), leading many to
believe that Callisto is undifferentiated and is composed of a homogeneous mixture of

6
Figure 1.3: Europa’s interior (top) is likely differentiated into a metallic core and rockymantle beneath its outer ice I layer and liquid water ocean. Ganymede (bottom, left)and Callisto (bottom, right) have internal liquid water oceans beneath layers of solid ice,but the interior of Ganymede is likely differentiated into a metallic core, rocky mantle,and thick mantle of high pressure ice polymorphs. Callisto’s interior is likely partiallydifferentiated.

7
water ice and rock particles (see Figure 1.3). Gravity data from the Galileo spacecraft
indicate that Callisto’s moment of inertia (0.359 ± 0.005) is less than the value implied
by a homogenous Callisto (0.38) (Anderson et al., 2001). Magnetometer data from
the Galileo spacecraft also indicate that Callisto has no intrinsic magnetic field like
Ganymede, strongly suggesting that it does not have a solid metallic core surrounded
by a liquid metallic outer core (Zimmer et al., 2000). Similar to Europa and Ganymede,
Callisto also exhibits an inductive response to Jupiter’s magnetic field, indicating that it
also has an internal ocean of liquid water. Magnetometry cannot yet constrain estimates
of the depth of the ocean, but indicates that it is less than 300 km beneath the surface
(Zimmer et al., 2000).
Although subsurface oceans likely exist in Europa, Ganymede, and Callisto, the
exact thickness of the solid portion of the ice shells is uncertain. Determination of the
ice shell thickness on each body based on a thermal equilibrium in a conductive ice
shell provides estimates of 5-25 km (Ojakangas and Stevenson, 1989; O’Brien et al.,
2002) for Europa (which includes tidal dissipation), 130 km for Ganymede, and 150
km for Callisto (see Chapter 2). However, more efficient heat transport by solid state
convection within the ice shells could remove the same heat flux and permit a much
thicker ice shell.
1.2.2 Surfaces
The surfaces of Europa and Ganymede display a rich variety of endogenic features
which are inferred to form from the effects of tidal stressing on the surface and possibly
convective motion in the outer ice I shell.
The most common features on Europa’s surface are double ridges (Figure 1.4),
which consist of ridge pairs, each separated by a central trough and more complex multi-
ridge morphologies (Greeley et al., 1998). Ridges are typically a few kilometers wide and
up to several hundred kilometers long; many exhibit signs of strike-slip faulting with

8
offsets of ∼ 1 to 10 km (Hoppa et al., 1999). One proposed method of ridge formation
suggests that double ridges form in response to frictional heating of the ice crust as
fault blocks slide past one another in response to tidal flexing of the shell (Nimmo and
Gaidos, 2002). Friction between the moving fault blocks causes localized heating due to
viscous dissipation along the fault plane, local thinning of the brittle lithosphere, and
thermally-driven upwelling, which may form the uplifted ridge structure (Nimmo and
Gaidos, 2002).
A large number of circular and quasi-circular pits, spots, and domes, collectively
referred to as “lenticulae,” have been observed on Europa (Figure 1.5). The sizes of
lenticulae range from 1-10’s of km with a mean diameter of ∼ 7 km (Spaun, 2001), and
uplifts of order 100 m. Based on their morphologies and similarity in size and spacing,
they are thought to form as a result of thermal convection in an ice shell 10’s of km thick
(Pappalardo et al., 1998). However, numerical modeling of convection in Europa’s ice
shell indicates that uplifts due to thermal convection alone are only of order 10 m (Show-
man and Han, 2004). Domes on Europa may represent diapiric upwellings of relatively
salt-free ice in a water ice + salt ice shell, where compositional and thermal buoyancy
act in concert to form uplifts of hundreds of meters with percentage-level differences in
composition (Pappalardo and Barr , 2004). Driven by compositional buoyancy, diapirs
responsible for dome formation are able to extrude onto the surface of Europa, or in
some cases stall in the shallow subsurface to form an uplifted plateau.
The term “chaos” is used to describe large areas of Europa’s surface where blocks
of pre-existing terrain have rotated, translated, and re-frozen in a rough matrix of ice
(Greeley et al., 2000). Figure 1.6 shows a high-resolution view of the interior of a chaos
region. Convection can form chaos regions if the stress due to thermal buoyancy that
drives convective upwellings exceeds the yield strength of ice at the surface (Collins
et al., 2000; Goodman et al., 2004). If chaos regions form above warm upwellings of
ice, partial melting of the ice shell is required to decrease the viscosity of the matrix

9
Figure 1.4: High resolution (20 meters per pixel) image of a double ridge approximately2 km wide on the surface of Europa. Pre-existing terrain is preserved on the upwarpedflanks of the ridge, lending support to the hypothesis that uplift, potentially from ther-mal buoyancy, drives ridge formation. (Image PIA00589.)

10
Figure 1.5: Pits, spots, and domes on the surface of Europa. Illumination is from theright, and the majority of the circular features are pits, approximately 10 km across.(Image PIA03878.)

11
material to permit motion of the blocks of existing terrain to rotate and translate to
their observed locations before the matrix freezes (Head and Pappalardo, 1999). An
alternative hypothesis suggests that chaos regions represent areas of complete melting
of Europa’s ice shell (Greenberg et al., 1999). The amount of heat required to melt
through the ice shell, however, is comparable to the entire tidal heating budget of
Europa’s shell for one thousand years (Collins et al., 2000). Recent analyses by Schenk
and Pappalardo (2004) indicate that chaos regions stand approximately 100 meters
higher than surrounding terrain, which presents a challenge to both the melt-through
and diapiric models.
Ganymede shows evidence of a complex geological history and possible modifi-
cation of its surface by convection. Roughly half of Ganymede’s surface is covered by
relatively bright, young grooved terrain (Shoemaker et al., 1982). Images from Voyager
reveal that the large, thousand kilometer-scale major groove lanes or “sulci” consist
of smaller, tens to hundred kilometer-scale sets of coherent grooves, also referred to
as “lanes” of deformation (Figure 1.7). The edges of these cells are marked by sharp
bounding grooves at which the groove pattern is truncated.
The global-scale coherence of the sulci and the superimposed smaller scale groove
pattern suggests a driving force which operates globally, but is capable of producing
intense deformation on local scales (Kirk and Stevenson, 1987). On the basis of images
such as Figure 1.7, it has been hypothesized that the sulci formed over convective
upwellings in Ganymede’s mantle (Shoemaker et al., 1982).
1.2.3 Tidal Effects
Tidal dissipation and tidal flexing has likely played a key role in the geological
evolution of the icy Galilean satellites by providing a heat source to facilitate fluid
motions in their interiors and potentially promoting fracture of their icy lithospheres.
Tidal effects on the Galilean satellites have endured over geologically long time scales

12
Figure 1.6: High-resolution view of the interior of a chaos region on Europa. Blocks ofexisting terrain have rotated, translated, and re-frozen in hummocky-textured matrixmaterial. (Image PIA00591.)

13
Figure 1.7: Image of Uruk Sulcus on Ganymede, obtained by the Voyager spacecraft.Within the larger groove lane structure, smaller coherent sets of grooves are approxi-mately 100 km across.

14
due to the Laplace resonance between Io, Europa, and Ganymede. Secular perturbations
on the system due to this resonance among the satellites causes the forced component
of their orbital eccentricities to be replenished on a time scale much shorter than the
eccentricity damping time scale. The persistent non-zero orbital eccentricity results in
ongoing dissipation of orbital energy in the interiors of the satellites, which undoubtedly
drives volcanism on Io, and likely plays a role in forming the interesting geology on the
surfaces of Europa and Ganymede.
In the absence of such a resonance, tidal dissipation within the satellites can
circularize their orbits relatively quickly, delivering a substantial amount of energy to
the interiors of the satellites. The rate of energy dissipation within a satellite in eccentric
orbit around Jupiter is given by (Peale and Cassen, 1978):
E = −21
2
k
Q
R5sGM2
Jne2
a6, (1.1)
where k is the Love number describing the response of satellite’s gravitational to the
applied tidal potential, Rs is the radius of the satellite, G is the gravitational constant,
MJ is the mass of Jupiter, n is the satellite’s mean motion, e is the orbital eccentricity,
Q is the tidal quality factor describing the fractional orbital energy dissipated per cycle,
and a is the semi-major axis of the satellite’s orbit about Jupiter.
The rate of energy dissipation defined by equation (1.1) represents a global total
and contains no information about the details of how tidal dissipation actually occurs, or
where it takes place within the satellites. As will be discussed in further chapters, tidal
dissipation may play a role in triggering convection in initially motionless conductive
ice shells in the satellites. Therefore, the key heat source that may initiate convection
in ice I and control the behavior of a convecting ice shell is not well understood.
If Europa has an internal fluid ocean, tidal forces cause substantial deformation
of the ice shell, and stresses which may be sufficient to cause fractures (Hoppa et al.,
1999). The time-variable component of the height of Europa’s diurnal tidal bulge is

15
approximately
ξtidal ∼h
g
3GMJa2
2R3e, (1.2)
where ξtidal is the maximum amount Europa’s surface lifts radially upward, h is the Love
number relating the radial deformation of the satellite to the applied tidal potential, g
is the acceleration of gravity on Europa. Given a Love number h = 1.2, the resulting
height is approximately 30 meters. The diurnal tidal stresses exerted on the surface of
Europa have approximate magnitudes of
τdiurnal ∼µl
ag
GMJa2
R3e,
where µ is the shear modulus of ice, and l is the Love number describing azimuthal
deformation in response to an applied tidal potential. Using a shear modulus of µ =
3 × 1010 Pa, and l = 0.2, the tidal stresses are approximately 30 kPa.
In addition to the daily tidal force experienced due to its eccentric orbit around
Jupiter, the ice shell of Europa may be decoupled from the interior by the ocean, and
could rotate differentially from its synchronously locked rocky interior. The amplitude
of the non-synchronous rotation stresses is approximately
τNS ∼µl
ag
GMJa2
2R3sin(2bt), (1.3)
where 2bt is the number of degrees of nonsynchronous rotation. If non-synchronous
rotation stresses accumulate over 5◦ of rotation of the ice shell, the stresses are of order
∼ 1 MPa.
1.3 Astrobiological Setting
The key to understanding whether an ecosystem can be sustained within and
plausibly detected on the surfaces of icy satellites lies in understanding the geological
processes which transport possible life, nutrients, and the chemical traces of life between
their ice-covered oceans and surfaces. Solid-state convection is one mechanism which

16
allows material to be transported within the ice shell on geologically short time scales.
Coupled with resurfacing events such as the formation of extrusive cryovolcanic features,
convection could provide a complete biogeochemical cycle wherein nutrients, interesting
ocean chemistry, and potentially, life, can be transported across the ice shell. Geophys-
ical processes relevant to astrobiology in the icy Galilean satellites are summarized in
Figure 5.1.
Because Europa’s ocean is cut off from sunlight by kilometers of ice, any life in the
ocean must be dependent upon delivery of nutrients from the ice shell or from eruptions
on Europa’s rocky mantle. Although it is possible that microbial communities could
be sustained through chemical reactions which do not rely on the circulation of the ice
shell, for example, at deep hydrothermal vents as suggested by McCollom (1999), or
based on chemical interactions between the rocky core and ocean (Jakosky and Shock ,
1998; Zolotov and Shock , 2004), the chemical energy available to organisms using these
reactions may be small compared to the amount of energy available in a radiation-driven
ecosystem. Therefore, we focus on geophysical processes that might permit surface ice
to be delivered to the oceans of the satellites.
Based on predictions of impactor flux and the observed number of craters larger
than 10 km, the nominal age of Europa’s surface is ∼ 50 Myr, with an uncertainty of a
factor of 5 (Zahnle et al., 1998; Pappalardo et al., 1999; Zahnle, 2001). If the material
within Europa’s ice shell is mixed into the ocean on time scales similar to the surface
age, two radiation-based nutrient sources could be made available to potential organisms
in the ocean.
Radioactive decay of 40K within the ice shell could generate up to ∼ 108 mol
yr−1 of O2 and H2, which could chemically equilibrate in the ocean and sustain ∼ 106
cell cm−3 of biomass over a 107 year timescale (Chyba and Hand , 2001). In addition,
formaldehyde, hydrogen peroxide, and other species are produced on the surface of
Europa when particles entrained in Jupiter’s magnetic field interact with H2O and CO2

17
ices, which have been detected spectroscopically on Europa’s surface (Carlson et al.,
1999). These materials are expected to be well mixed to a depth of 1.3 meters (Cooper
et al., 2001). The steady-state biomass that could be sustained by the equilibration of
formaldehyde and hydrogen peroxide is estimated to be ∼ 1023 cells (Chyba and Phillips,
2002), or 0.1 to 1 cell cm−3, assuming the top 1.3 meters of ice is transported to the
ocean every 107 years.
The basic elemental building blocks of life and additional nutrients for life may
be delivered to Europa through cometary impacts. Although a large percentage of
the ejecta from a large impact exceeds Europa’s escape velocity, at least 1012 to 1013
kg of carbon, and 1011 to 1012 kg of nitrogen, sulfur, and phosphorous may have been
delivered to Europa’s surface by giant impacts over the age of the solar system (Pierazzo
and Chyba, 2002). Endogenic resurfacing events perhaps coupled with downward motion
of ice in a convecting ice shell would be required to deliver these materials to Europa’s
ocean.
Abundant endogenic resurfacing and active tidal dissipation on Europa suggests
that among the large icy satellites in our solar system, Europa holds the most potential
for finding life or interesting chemistry near its surface. The formation of surface features
such as domes (Pappalardo and Barr , 2004) and ridges (Nimmo and Gaidos, 2002) on
Europa may allow small areas of the surface ice to be mixed into the subsurface, but a
global mechanism of surface-ocean communication is required to sustain a biosphere.
Unlike an ocean on Europa which may be in direct contact with hydrothermal
systems on a rocky sea floor, Ganymede’s ocean is sandwiched between an outer layer
of ice up to 160 km thick, and a mantle of high density ice polymorphs. Callisto’s
ocean is sandwiched between an outer layer of ice I up to 180 km thick and its partially
differentiated interior. As a result, both oceans are seemingly isolated from the chemical
nutrients that might sustain a biosphere.
Callisto and Ganymede experience a less intense radiation environment than Eu-

18
ropa; therefore, fewer oxidants are available by particle and radiation bombardment.
However, abundant dust on the surfaces of Callisto and Ganymede generated by as-
teroidal and cometary impacts may provide nutrients for life within their sub-surface
oceans. As in Europa, decay of 40K may generate oxidants within the icy layers and
ocean.
Ganymede’s ocean may receive additional nutrients from the top of its rocky core.
Silicate eruptions at the core/ice boundary can generate nutrient-rich pockets of melt
water, which are buoyant relative to the surrounding high-pressure, high-density ice
polymorphs. Provided these pockets of melt are large enough, they might reach the
ocean on geologically a short time scale of ∼ 106 years (Barr et al., 2001).
Despite these potential nutrient sources, the oceans in Callisto and Ganymede are
likely less hospitable to life than Europa’s ocean. If biological activity existed within
Ganymede’s ocean, it would be more difficult to detect than life on Europa due to
its older surface and limited period of endogenic resurfacing. Callisto appears to have
experienced essentially no endogenic resurfacing in the recent geologic past, indicating
that detection of a biosphere within Callisto would require sampling beneath the rigid
surface ice with a sophisticated landed spacecraft, or searching within a large impact
crater.
1.4 Rheology of Ice I
A large volume of experimental data and observations exist regarding the rheology
of ice I in terrestrial and planetary contexts (Durham and Stern, 2001, and references
therein). Recent laboratory experiments seeking to clarify the deformation mechanisms
responsible for flow in terrestrial ice sheets suggest that a composite flow law which in-
cludes terms due to diffusional flow, grain boundary sliding, basal slip, and dislocation
creep (Goldsby and Kohlstedt , 2001) can match both viscosity measurements from ter-
restrial ice sheets (Peltier et al., 2000) and previous laboratory experiments. Conceptual

19
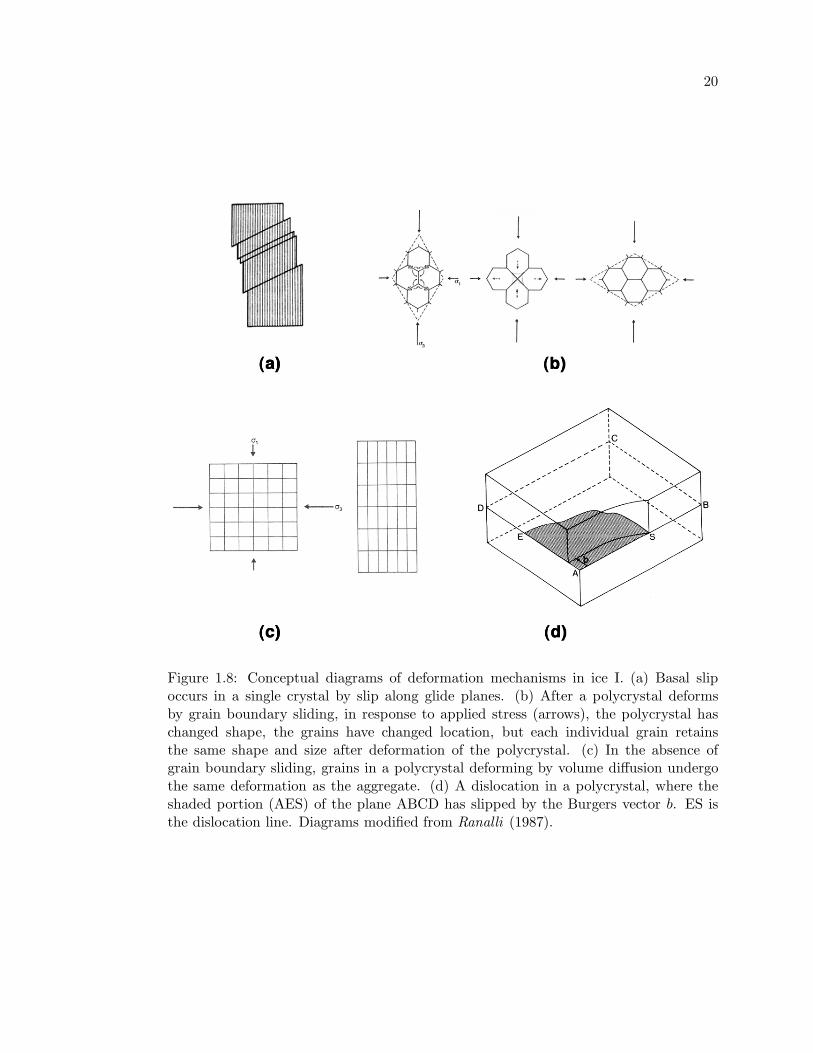
diagrams of the four deformation mechanisms are shown in Figure 1.8.
The total rate of deformation in ice I is expressed as the sum of strain rates due
to the four individual creep mechanisms,
εtotal = εdiff + εdisl +
(
1
εGBS+
1
εbs
)−1
, (1.4)
where (diff) represents diffusional flow, (disl) represents dislocation creep, (bs) rep-
resents basal slip, and GBS represents grain boundary sliding. Grain boundary slid-
ing and basal slip (collectively, grain-size-sensitive creep, or GSS creep) are dependent
mechanisms, and both must operate simultaneously to permit deformation (Durham
and Stern, 2001).
The strain rate for each deformation mechanism is described by
ε = Aσn
dpexp
(−Q∗
RT
)
, (1.5)
where ε is the strain rate, A is the pre-exponential parameter, σ is stress, n is the stress
exponent, d is the ice grain size, p is the grain size exponent and Q∗ is the activation
energy, R is the gas constant, and T is temperature. Rheological parameters from the
experiments of Goldsby and Kohlstedt (2001) used in our models are summarized in
Table A.2.
For ice near its melting point, Goldsby and Kohlstedt (2001) present an alternate
set of creep parameters to describe large creep rates and low viscosities observed in ice
near its melting point in terrestrial ice cores and laboratory samples. The enhancement
of creep rates in ice near its melting point is attributed to premelting along grain
boundaries and edges. High temperature creep enhancement is not included in the
models presented in this thesis, but the possible implications of including such a term,
are discussed when relevant, in Chapters 2, 3, 4, and 6.
The deformation mechanism that yields the highest strain rate for a given tem-
perature and differential stress is judged to dominate flow at that temperature and
20
Figure 1.8: Conceptual diagrams of deformation mechanisms in ice I. (a) Basal slipoccurs in a single crystal by slip along glide planes. (b) After a polycrystal deformsby grain boundary sliding, in response to applied stress (arrows), the polycrystal haschanged shape, the grains have changed location, but each individual grain retainsthe same shape and size after deformation of the polycrystal. (c) In the absence ofgrain boundary sliding, grains in a polycrystal deforming by volume diffusion undergothe same deformation as the aggregate. (d) A dislocation in a polycrystal, where theshaded portion (AES) of the plane ABCD has slipped by the Burgers vector b. ES isthe dislocation line. Diagrams modified from Ranalli (1987).

21
stress level. The transition stress between any pair of flow laws, for example, GBS and
dislocation creep, is
σT =
(
AGBS
Adisl
dpdisl
dpGBSexp
((Q∗
disl − Q∗GBS)
RT
))1
ndisl−nGBS
. (1.6)
The expressions for the transition stresses between the various deformation mechanisms
can be used to construct deformation maps showing the boundaries of regimes of domi-
nance for each constituent creep mechanism. Deformation maps for ice with grain sizes
0.1 mm, 1.0 mm, 1.0 cm, and 10 cm are shown in Figure 3.1. If the high-temperature
creep enhancement is not included in the rheology, deformation in ice is accommodated
by the Newtonian deformation mechanism of volume diffusion when the temperature of
the ice is close to the melting point, or the grain size is small, (d < 1 mm). In this regime
of behavior, the viscosity of ice depends strongly on temperature only. At lower temper-
atures and/or for grain sizes larger than 1.0 cm, deformation in ice is accommodated by
dislocation creep, and the viscosity of ice depends strongly on temperature and stress.
For intermediate grain sizes, deformation occurs due to GSS creep, and the viscosity of
the ice is strongly temperature-dependent, but only weakly stress-dependent.
1.5 Convection in Ice I
Over millions of years, the behavior of ice can be described as flow of a highly
viscous fluid, analogous to flow within the Earth’s mantle. The outer ice I shells of large
icy satellites are heated from beneath by decay of radioactive elements in the satellites’
rocky interiors, and potentially from within by tidal dissipation. Similar to rock, ice
expands when it is heated, so a basally heated or internally heated ice shell will be
gravitationally unstable, and when perturbed, warm ice will rise from the base of the
shell. Likewise, cold pockets of ice near the surface will sink. When this process is self-
sustaining over a geologically long time scale, it is referred to as solid-state convection.

22
1.5.1 Governing Equations
In this work, the outer ice I shells of the Galilean satellites are approximated as
2D Cartesian plane layers of incompressible fluids. The outer ice I shells occupy a small
fraction of the total radii of the satellites, so treating the shells as plane layers of fluid is
a valid approximation. The equations of convection are phrased in the Boussinesq ap-
proximation, where small density differences due to thermal expansion drive convective
motion.
Conservation of mass in thermal convection is expressed by the continuity condi-
tion (Schubert et al., 2001):
∇ · ~v = 0, (1.7)
where ~v = (vx, vz) is the velocity field. Physically, equation (1.7) dictates that no
sources or sinks of material exist in the fluid layer. Conservation of energy in thermal
convection is expressed by
~v · ∇T︸ ︷︷ ︸
Advection
+∂T
∂t= κ∇2T
︸ ︷︷ ︸
Diffusion
+ γ︸︷︷︸
Sources
, (1.8)
where T is temperature, t is time, κ is the thermal diffusivity, and γ represents external
heat sources such as radiogenic heating in the interior of the fluid layer (Schubert et al.,
2001). In this work, γ = 0. In the convecting fluid, energy is transfered by mass
transport (advection) in addition to thermal diffusion. Conservation of momentum (i.e.
force balance) is described by:
−∇P + ρgez︸ ︷︷ ︸
Hydrostatic Equilibrium
= −∇ · [η(∇~v + ∇T~v])︸ ︷︷ ︸
Viscous Forces
(1.9)
where P is pressure, ρ is the density of the fluid, g is gravity, ez is a unit vector in the z-
direction, and η is the fluid viscosity (Schubert et al., 2001). In the convecting layer, the
viscous forces act against thermal buoyancy to retard upward motion of warm fluid and
downward motion of cold fluid. Thermal buoyancy is introduced into the momentum

23
balance equation by substituting
ρ = ρo[1 − α(T − To)], (1.10)
where ρo is the density of the fluid at a reference temperature (To) and α is the coeffi-
cient of thermal expansion, into equation (1.9). Lithostatic pressure is eliminated from
equation (1.9) by substituting
P = ρogez − p, (1.11)
where p is the dynamic pressure. With these substitutions, equation (1.9) becomes:
∇p + ρoα(T − To)gez = ∇ · [η(∇~v + ∇T~v)]. (1.12)
It is helpful to notice at this point that the only time dependence in the governing
equations appears in the advection-diffusion terms in equation (1.8), and the momen-
tum balance equation (1.12) is time-independent. This occurs because the viscosity
of the ice is very large, so thermal diffusion dominates over diffusion of momentum
through the fluid by viscous flow. Fluid velocities therefore change very slowly with
time. Mathematically, the Navier-Stokes equation (Kundu, 1990):
∂vi
∂t+ vj
∂vi
∂xj=
−1
ρ
∂p
∂xi+ gez , (1.13)
reduces to
vj∂vi
∂xj=
−1
ρ
∂p
∂xi+ gez (1.14)
because
∂vi
∂t∼ 0, (1.15)
and is independent of time. Equation (1.14) is essentially the same as equation (1.12).
In this study, the equations of thermal convection (1.7), (1.8), and (1.12) are
solved subject to constant temperature boundary conditions at the surface and base of
the fluid layer,
T (x,−D) = Tm (1.16)
T (x, 0) = Ts, (1.17)
24
and insulating edges
∂T
∂x
∣∣∣∣x=xmax
= 0. (1.18)
Free-slip (zero shear stress) boundary conditions are imposed at the edges of the fluid
layer:
∂vz
∂x
∣∣∣∣x=0,xmax
= 0 (1.19)
and on the top and bottom surfaces of the layer,
∂vx
∂z
∣∣∣∣z=0,−D
= 0 (1.20)
An initial condition of form:
T (x, z) = Ts −z∆T
D+ δT cos
(2πD
λx
)
sin
(−zπ
D
)
(1.21)
is used, where δT and λ are the amplitude and wavelength of the perturbation, and z =
−D at the warm base of the ice shell. The temperature field defined by equation (1.21)
represents the sum of the temperature field resulting from a conductive equilibrium
between the surface and base of the ice shell, and a temperature anomaly, distributed
according to:
δT (x, z) = δT cos
(2πD
λx
)
sin
(−zπ
D
)
. (1.22)
Figure 1.9 illustrates a temperature anomaly (δT (x, z)) of amplitude 15 K in an ice shell
30 km thick used in a simulation in this thesis.
The finite element model Citcom developed to study convection in terrestrial plan-
etary mantles is used in this study to solve equations (1.7), (1.8), and (1.12) subject
to the boundary conditions described above. A general overview of the finite element
method can be found in Hughes (1987). The momentum equation and continuity equa-
tions are solved using a Uzawa algorithm (Ramage and Wathen, 1994), and a Streamline
Upwind Petrov-Galerkin method is used to solve the energy equation (Brooks, 1981).
Details regarding the specific implementation of these techniques in Citcom to solve

25
-30
-20
-10
0D
epth
(km
)
0 10 20
X (km)
-15 -10 -5 0 5 10 15
δT (K)
Figure 1.9: Initial temperature perturbation issued to the ice shell (δT (x, z)) from asample simulation in this thesis. Here, Ts = 110 K and Tm = 260 K, so δT = 0.1∆T=15K. The wavelength of perturbation used here is λ = 1.75D. The temperature excess anddeficit that trigger convection in the ice shell are spaced approximately 27 km apart.

26
the governing equations of convection and application of Citcom to terrestrial planetary
problems can be found in Moresi and Gurnis (1996), Zhong et al. (1998), and Zhong
et al. (2000).
Given an initial temperature field, Citcom generates a velocity field based on the
viscosity of the ice, thermal buoyancy, and conservation of momentum. The dynamic to-
pography from convection and heat flux are calculated, after which the energy equation
is solved and the solution is propagated forward in time.
The temperature and velocity fields are defined at each computational node, and
the dynamic topography and heat flux at the surface and base of the convecting layer
are output after a number of time steps. In addition to the total viscosity field, when im-
plementing a composite rheology for ice I in Chapters 3 through 5, Citcom is instructed
to report an effective viscosity due to each individual creep mechanism (diffusional flow,
GSS creep, and dislocation creep). This information is used to judge the relative impor-
tance of each deformation mechanism in accommodating convective strain in Chapters
3 and 4.
1.5.2 Non-Dimensional Coordinates
Within the framework of Citcom, the equations of thermal convection are solved
in non-dimensional coordinates. The coordinates are non-dimensionalized using the
Rayleigh number, a ratio between the thermal buoyancy and viscous restoring forces in
the fluid:
Ra =ρgα∆TD3
κηo, (1.23)
where ∆T is the temperature difference between the surface and bottom of the layer,
D is the thickness of the layer, and ηo is the reference viscosity. The reference value of
Rayleigh number supplied to Citcom determines the quantities used to re-dimensionalize
the coordinates after the simulation is complete. When the viscosity is dependent on
temperature and strain rate (or stress), the Rayleigh number of the fluid layer becomes

27
a function of temperature and strain rate (or stress), necessitating a precise definition of
the Rayleigh number in terms of a reference temperature and strain rate (or stress). In
this thesis, the Rayleigh number is always defined at the melting temperature of ice. A
reference strain rate εo = κD2 is used in Chapter 2. In Chapters 3 through 5, a reference
strain rate of εo = 10−13 s−1 is used, largely for algebraic convenience.
The definition of the reference strain rate, and thus, the reference Rayleigh num-
ber, is somewhat arbitrary, so the values of Rayleigh number used in simulations with
a composite rheology for ice I may seem counterintuitive (for example, Rao = 10−2)
when the grain size of ice is large and the ice becomes strongly non-Newtonian. In a
non-Newtonian fluid, as the fluid begins to flow and convection starts, the viscosities in
the fluid layer decrease. The viscosity in the convecting sublayer may be several orders
of magnitude lower than the reference viscosity. A more physically intuitive definition
of Rayleigh number in the non-Newtonian case is the effective Rayleigh number:
Raeff =Raoηo
〈η〉(1.24)
where the average viscosity in the convecting sublayer (〈η〉) can be calculated after the
convection simulation is run.
The temperature in the fluid layer is rephrased in non-dimensional coordinates
(primed quantities) using the temperature difference between the base of the ice layer
and the surface of the layer,
T ′ =T − Ts
Tm − Ts, (1.25)
where Tm is the melting temperature of ice, and Ts is the surface temperature on the
icy satellite. The warm base of the ice shell at z = −D is held at a non-dimensional
temperature T ′ = 1, and the surface is held at T ′ = 0. The spatial coordinates in the
fluid layer are non-dimensionalized using the thickness of the ice shell,
x′ =x
D(1.26)
z′ =z
D. (1.27)

28
Time coordinates (t) and velocity coordinates (v) are non-dimensionalized using the
thermal diffusivity and layer thickenss as:
t′ =tD2
κ(1.28)
v′ =vD
κ. (1.29)
The dynamic topography resulting from thermal bouyancy is output in units of pressure,
which can be converted to heights using p = ρgh as:
htopo =p′ηoκ
ρgD2. (1.30)
Mass fluxes (M = ρv2) due to convection are re-dimensionalized using
M = ρ(v′)2κD, (1.31)
where an implicit assumption has been made that the structure of the convective flow
field in the third (unsued) y dimension, is identical to the x direction.
1.5.3 Viscosity Functions
A series of temperature-, strain rate-, and stress-dependent viscosity functions
for ice I are implemented in Citcom to allow the model to apply to icy satellites. In
this thesis, the temperature dependence in the ice flow laws are expressed using an
Arrhenius law, which is common practice for icy satellite studies. In this formulation,
the lab-derived flow law of form
η(T ) = A exp( Q∗
nRT
)
, (1.32)
is non-dimensionalized by dividing by the viscosity evaluated at the melting point,
η′(T ′) = exp
(E
T ′ + T ′o
−E
1 + T ′o
)
, (1.33)
where E = Q∗/nR∆T and T ′o = Ts/∆T . This procedure retains the exact temperature
dependence determined by laboratory experiments, and predicts very large viscosities

29
near the surface of the ice shell. In this study, numerical cut-offs to limit the viscosity
values near the surface of max(η) = 107 − 1010 are used to prevent essentially infinite
viscosities in the near-surface ice.
In Chapter 2, a single term from the composite rheology for ice I (equation 1.4)
for grain boundary sliding or basal slip is implemented. The viscosity due to GBS or
basal slip in ice is calculated as a strain rate-dependent viscosity,
η =
(dp
A
)1/n
ε(1−n)/nII exp
(Q∗
nRT
)
, (1.34)
where εII is the second invariant of the strain rate tensor:
εII =1
2
(∑
i,j
(∂vi
∂vj+
∂vj
∂vi
))1/2. (1.35)
This form of viscosity function approximates the behavior of a true stress-dependent
rheology, but is more numerically tractable in Citcom than a stress-dependent viscosity
function.
When the viscosity is stress- or strain rate-dependent, the velocity and viscosity
fields are coupled. The fields must be solved iteratively until convergence is achieved.
This introduces further non-linearity to the convection problem and can result in very
low viscosities in the convecting region where the ice is flowing, and large viscosities in
the near surface ice where convective motions are negligible. The requirement to iterate
to find self-consistent viscosity and velocity fields makes simulations of convection in
non-Newtonian fluids computationally expensive compared to Newtonian models. As a
result, before this thesis, implementation of the strain rate- or stress-dependence has so
far been ignored in numerical convection models of icy satellites.
1.5.4 Composite Rheology for Ice I
The full composite rheology for ice I (equation 1.4) is implemented in simulations
presented in Chapters 3, 4, and 5. In the composite rheology determined by Goldsby

30
and Kohlstedt (2001), each deformation mechanism has a distinct stress exponent and
activation energy, so inversion of equation (1.4) for an exact expression for viscosity
(η = σ/ε) is not possible. However, an approximate expression for the viscosity due to
all four deformation mechanisms can be found using the procedure described here.
The composite flow law for ice I (equation 1.4) can be expressed in terms of
stresses using η = σ/ε as
σtot
ηtot=
σdiff
ηdiff+
σdisl
ηdisl+
(
ηGBS
σGBS+
ηbs
σbs
)−1
. (1.36)
With the approximation that the stresses for each deformation mechanism are
approximately equal to the total stress (i.e., σtot = σdiff = σGBS = σbs), equation
(1.36) can be re-written as:
σtot
(
1
ηtot
)
∼ σtot
[
1
ηdiff+
1
ηdisl+
(
ηGBS + ηbs
)−1]
. (1.37)
Canceling the common factor of σtot, the expression for the approximate viscosity
due to all four mechanisms becomes
1
ηtot=
[
1
ηdiff+
1
ηdisl+
(
ηGBS + ηbs
)−1]
. (1.38)
The approximate nature of this expression is most evident near the transition stresses
between pairs of deformation mechanisms, where the viscosity is underestimated. If the
stress applied to the ice is much larger than the transition stresses between the pairs
of deformation mechanisms, a single term in the composite flow law will contribute the
majority of the total strain rate, so the viscosity may be calculated using η = σ/ε by
assuming the contribution of the other terms are negligible. At the transition stress
between a pair of mechanisms, each mechanism contributes to the strain rate equally,
and errors are introduced by neglecting the contribution from one of the constituent
mechanisms. This effect is demonstrated graphically in Figure 3.2.
A stress dependent rheology of form
η =dp
Aσ(1−n) exp
( Q∗
RT
)
, (1.39)

31
is used for each term in the composite rheology (equation 1.38). The resulting flow law
for ice I is
1
ηtot=
Adiff
d2exp
(−Q∗
v
RT
)
+ Adislσ3 exp
(−Q∗
disl
RT
)
+
+
(
d1.4
AGBSσ−0.8 exp
(Q∗
GBS
RT
)
+1
Absσ−1.4 exp
(Q∗
bs
RT
))−1
(1.40)
where the stress and grain size exponents for each flow law have been evaluated to
highlight the weakly non-Newtonian behavior of grain boundary sliding and basal slip.
To non-dimensionalize the viscosity functions, each term in the composite rheol-
ogy (equation 1.38) is divided by a reference viscosity defined by the viscosity due to
diffusion creep at the melting temperature of ice. The strain rate from diffusion creep
is described by
ε =ADF Vmσ
RTmd2
(
Dv +πδ
dDb
)
(1.41)
where ADF is the diffusion constant, Vm is the molar volume, Tm is the melting tem-
perature of ice, Dv is the rate of volume diffusion, δ is the grain boundary width, and
Db is the rate of grain boundary diffusion. For small strains of order 1%, ADF = 42,
but for larger strains ADF > 42 (Goodman et al., 1981). Here, ADF = 42 is used.
The grain sizes of ice in the satellites are likely much larger than the grain bound-
ary width (9.04×10−10 m) (Goldsby and Kohlstedt , 2001), so volume diffusion dominates
over grain boundary diffusion, and the contribution to the strain rate by grain boundary
diffusion is negligible. The strain rate for volume diffusion is:
ε =42Vmσ
RTmd2Do,v exp
(−Q∗
v
RT
)
(1.42)
where Do,v is the volume diffusion rate coefficient and Q∗v is the activation energy.
The parameters for volume diffusion are listed in Table A.2, where the pre-exponential
parameters have been grouped as A = (42VmDo,v/RTm). The viscosity due to volume
diffusion is, therefore,
ηo =d2
Aexp
( Q∗v
RTm
)
. (1.43)

32
The non-dimensionalized form of the composite viscosity (equation 1.40) is,
1
ηtot= exp
(Ev
1 + T ′o
−Ev
T ′ + T ′o
)
+ βdislσ′3 exp
(−Edisl
T ′ + T ′o
)
+
(
βGBSσ′−0.8 exp
(EGBS
T ′ + T ′o
)
+ βbsσ′−1.4 exp
(Ebs
T ′ + T ′o
))−1
, (1.44)
where Ei = Q∗i /R∆T .
The transition stresses between the various deformation mechanisms are repre-
sented in the expression for total viscosity by a series of relative weighting factors (β)
between the four rheologies, which govern the relative importance of each deforma-
tion mechanism as a function of temperature and grain size. The weighting factor for
dislocation creep is given by
βdisl = Adislη3o ε
−4o , (1.45)
where ηo is the reference viscosity, εo = 10−13 s−1 is the reference strain rate. The
weighting factors for GBS and basal slip are
βGBS =d1.4
AGBSη−1.8
o ε−0.8o (1.46)
and
βbs =1
Absη−2.4
o ε−1.4o . (1.47)
Values of the weighting factors for each rheology are shown in Table B.7 for the range
of grain sizes used.
Information about the stress field (σ = ηε) is not available to Citcom when the
viscosity subroutine is accessed because only the velocity field is known. Following the
suggestion of Allen McNamara (personal communication), who implemented composite
rheologies for mantle materials in McNamara et al. (2003), a subroutine to calculate
the stress iteratively using σ = ηεII was implemented. This procedure permits use of a
stress-dependent rheology, but introduces a further iterative loop in the solution, which
makes implementation of a stress-dependent composite rheology more computationally
expensive than a strain rate-dependent rheology.

33
Regardless of which type of viscosity function is implemented, a smoothing al-
gorithm is applied to to the viscosity field between time steps. This technique was
suggested by Jeroen Van Hunen (personal communication) after it was discovered that
an Arrhenius temperature law and strain rate-dependent viscosity subroutines caused
wild swings in the viscosity field between time steps in the particular version of Citcom
used in this thesis. After the viscosity subroutine is called, the viscosity information is
saved, and in the next time step, the new viscosity and old viscosity are averaged using
ln(ηnew) = (1 − w) ln(ηold) + w ln(ηnew), (1.48)
where w = 0.2 is a weighting factor.
1.6 The Onset of Convection
Whether convection can occur in an ice layer is governed by the relative balance of
thermal buoyancy forces to viscous restoring forces in the ice. The stability of a basally
heated fluid layer against convection can be judged by examining the balance between
thermal buoyancy, which drives the formation of plumes at the base of the fluid layer,
thermal diffusion, which acts to decrease thermal buoyancy, and the viscous restoring
forces that retard plume growth. The balance of forces against thermal diffusion is
expressed by the Rayleigh number, and convection can occur in a fluid layer if the
Rayleigh number of the fluid layer exceeds a critical value (Racr) which depends on the
wavelength of initial temperature perturbation issued to the layer and the geometry of
the layer.
1.6.1 Linear Stability Analysis
The onset of thermal convection in fluids is commonly modeled using the tech-
nique of linear stability analysis (Chandrasekhar , 1961; Turcotte and Schubert , 1982),
in which the growth or decay of an initial temperature perturbation embedded in a con-

34
ductive fluid layer is analyzed to determine the critical Rayleigh number for convection.
If the amplitude of an initial perturbation grows with time, the fluid layer can convect.
If the amplitude decays and the layer returns to a conductive equilibrium, the fluid layer
cannot convect.
The gravitational restoring forces that retard plume growth depend on the vis-
cosity of the fluid, so the critical Rayleigh number is a function of the rheology of the
fluid in addition to the thermal and physical properties of the fluid layer. For a fluid
with a viscosity dependent on temperature only, the critical Rayleigh number is a func-
tion of how sharply the viscosity varies with temperature near the melting point. In a
fluid with a non-Newtonian rheology, the restoring force depends on the thermal stress
generated by the initial convecting plume. As a result, the critical Rayleigh number for
convection in a non-Newtonian fluid depends on the initial temperature perturbation in
the fluid, in addition to the rheological and physical parameters.
1.6.2 Non-Newtonian Rheologies
Numerical studies regarding the onset of convection in non-Newtonian, basally
heated fluids define the critical Rayleigh number as the minimum value of Rayleigh num-
ber where convection cannot occur regardless of initial conditions (Solomatov , 1995).
This definition of critical Rayleigh number is directly relevant to terrestrial planets be-
cause it can be used to address the conditions under which convection in a planetary
mantle will cease as the radiogenic heating that drives convection in terrestrial planets
decays with time.
However, the critical Rayleigh number for the onset of convection in a non-
Newtonian fluid cannot be determined using linear stability analysis (Tien et al., 1969;
Solomatov , 1995). The viscosity of a non-Newtonian fluid depends on both temper-
ature and strain rate, so the viscosity in the perturbed layer of fluid depends on the
amplitude of the initial perturbation and becomes infinite as the amplitude becomes

35
small (Solomatov , 1995). Convection in a non-Newtonian fluid with a temperature- and
strain rate-depdendent rheology is always a finite-amplitude instability, and cannot be
readily analyzed analytically (Solomatov , 1995).
Analysis of the onset of convection in a fluid with stress-dependent (but not
temperature-dependent) rheology can provide constraints on how the non-Newtonian
behavior affects Racr. An alternative method of determining Racr for a non-Newtonian
fluid stems from a physical argument put forth by Chandrasekhar (1961), who pos-
tulated that the critical Rayleigh number occured at a critical temperature gradient
where the dissipation of energy by viscous forces in the system exactly balanced the
release of energy from the rising, thermally buoyant plume. Using an energy balance
argument, Tien et al. (1969) were able to calculate the critical Rayleigh number for
non-Newtonian fluids with a range of values of stress exponent, which compared fa-
vorably to their laboratory measurements of critical Rayleigh number for fluids with
stress-dependent rheologies.
The most widely-used results for the critical Rayleigh number for convection in a
non-Newtonian fluid arise from the pivotal study of Solomatov (1995), who built upon
the analysis of Tien et al. (1969) plus additional studies by Ozoe and Churchill (1972)
to consider a stress- and temperature-dependent rheology. With the knowledge that
the critical Rayleigh number for a non-Newtonian fluid depends on initial conditions,
Solomatov (1995) characterized the value of Rayleigh number where convection could
not occur, regardless of initial conditions.
Unlike terrestrial planets, icy satellites can potentially receive bursts of heat due
to tidal dissipation relatively late in their evolutionary histories. If an ice shell is con-
vecting when tidal dissipation begins, and the heat generated within the ice exceeds the
maximum convective heat flux, which is controlled by the rheology of ice, the shell will
melt at its base and thin. If the layer thickness drops below a critical value, convection
will cease. The value of critical layer thickness where convection is no longer possible

36
can be estimated using the Rayleigh number characterized by terrestrial studies, for
example, Solomatov (1995). However, if the ice shell is in conductive equilibrium when
tidal dissipation begins, the viscosity of the motionless ice would be large, and a large
temperature anomaly would be required to soften the non-Newtonian ice layer enough
to permit convection.
A loosely analogous situation can occur on Earth, beneath the continents where
thickened non-Newtonian lithosphere can become gravitationally unstable and form
plumes that sink into the mantle. Numerical simulations and experiments suggest that
the growth rate of lithospheric thickness perturbations depends on a power law of the
perturbation amplitude (Molnar et al., 1998). Thus, the critical Rayleigh number for
the onset of sublithospheric convection depends on a power of the perturbation ampli-
tude. Calculations presented in Chapters 2 and 3 will show that the critical Rayleigh
number for convection in non-Newtonian ice is strongly dependent on the physical char-
acteristics of the temperature anomalies within the ice shell, specifically their amplitude
and wavelength.
1.7 Previous Studies of Convection in the Icy Satellites
A large volume of literature exists regarding convection in the outer ice I shells of
the icy Galilean satellites, dating back to the pre-Voyager study of Reynolds and Cassen
(1979). The studies fall into two broad categories: parameterized convection models,
and numerical convection models. Parameterized convection studies use algebraic scal-
ing laws between the thermal and physical properties of the ice, the critical Rayleigh
number, and the convective heat flux to determine whether convection occurs, and the
efficiency of convective heat transfer.
Modern applications of parameterized convection models such as Spohn and Schu-
bert (2003) and Ruiz (2001) focus on determining the conditions under which the liq-
uid water oceans can remain stable against convective and conductive heat transport.

37
At the heart of such studies are the relationships between the critical Rayleigh num-
ber and the rheology of ice, and the Rayleigh number - Nusselt number relationship,
which expresses the efficency of convective heat transport. Both relationships are highly
rheology-dependent.
Results of many numerical studies designed for terrestrial mantle convection such
as Solomatov (1995) and Solomatov and Moresi (2000) have been brought to bear on
the critical Rayleigh number and the Ra-Nu scaling. In general, parameterized studies
predict that oceans are not thermodynamically stable beneath a convecting ice shell,
due to efficient convective heat transport. The results of these studies are limited by
uncertainties in the rheology of ice and the role of tidal dissipation. The majority
of these studies have been conducted with Newtonian rheologies for ice I, but recent
works regarding convection in Europa’s ice I shell by Nimmo and Manga (2002) and the
convective stability of Callisto’s ice I shell by Ruiz (2001) use individual non-Newtonian
terms from the Goldsby and Kohlstedt (2001) rheology.
Numerical studies such as this thesis typically involve implementing rheologies
for ice I in a finite-element convection model with the goal of refining the algebraic laws
used in parameterized studies. Numerical studies have recently come into favor as a tool
for addressing the formation of surface features on Europa (Tobie et al., 2003; Showman
and Han, 2004).
Numerical simulations of convection in ice I have so far been limited to Newtonian
rheologies. Most of the numerical efforts have focused on implementing a model for tidal
dissipation in the ice shell developed by Wang and Stevenson (2000), extended by Tobie
et al. (2003) and Showman and Han (2004). The non-Newtonian behavior of ice I has
been ignored in previous convection models, with the rationale that the viscosity of ice
is only weakly stress-dependent, so the temperature-dependence dominates the behavior
of the ice shell. The results presented in Chapter 4 indicate that when studying well-
developed convection patterns in ice, this assumption is largely true. However, a key

38
and significant departure between Newtonian and non-Newtonian convection in ice I
occurs in the onset of convection, which will be discussed in detail in Chapters 2 and 3.

Chapter 2
Convective Instability in Ice I with Non-Newtonian Rheology
This chapter is in press in the Journal of Geophysical Research:
Barr, A. C., R. T. Pappalardo, S. Zhong (2004), Convective Instability in Ice I
with Non-Newtonian Rheology: Application to the Icy Galilean Satellites, J. Gephys.
Res., 2004JE002296, in press.
2.1 Abstract
At the temperatures and stresses associated with the onset of convection in an ice
I shell of the Galilean satellites, ice behaves as a non-Newtonian fluid with a viscosity
that depends on both temperature and strain rate. The convective stability of a non-
Newtonian ice shell can be judged by comparing the Rayleigh number of the shell
to a critical value. Previous studies suggest that the critical Rayleigh number for a
non-Newtonian fluid depends on the initial conditions in the fluid layer, in addition
to the thermal, rheological, and physical properties of the fluid. We seek to extend
the existing definition of the critical Rayleigh number for a non-Newtonian, basally
heated fluid by quantifying the conditions required to initiate convection in an ice I
layer initially in conductive equilibrium. We find that the critical Rayleigh number for
the onset of convection in ice I varies as a power (-0.6 to -0.5) of the amplitude of the
initial temperature perturbation issued to the layer, when the amplitude of perturbation
is less than the rheological temperature scale. For larger amplitude perturbations, the

40
critical Rayleigh number achieves a constant value. We characterize the critical Rayleigh
number as a function of surface temperature of the satellite, melting temperature of
ice, and rheological parameters so that our results may be extrapolated for use with
other rheologies and for a generic large icy satellite. The values of critical Rayleigh
number imply that triggering convection from a conductive equilibrium in a pure ice
shell less than 100 km thick in Europa, Ganymede, or Callisto requires a large, localized
temperature perturbation of 1-10’s K to soften the ice, and therefore may require tidal
dissipation in the ice shell.
2.2 Introduction
Results from the Galileo magnetometer strongly suggest the presence of liquid
water oceans within Jupiter’s satellites Europa, Ganymede, and Callisto (Zimmer et al.,
2000; Kivelson et al., 2002). Measurements of Europa’s gravitational field indicate that
the outer 170 km of the satellite is composed of H2O-rich material, which may be in some
part liquid (Anderson et al., 1998). Because the density of liquid water is intermediate
between the densities of ice I and its high pressure polymorphs, liquid water oceans
within Ganymede and Callisto are likely sandwiched between layers of ice I atop the
ocean and ice III or V beneath the ocean. The modes of heat transport in the ice shells
and their methods of endogenic resurfacing are not well understood, in part because
uncertainties in the shell thickness, the rheology of ice, and the role of tidal dissipation
hamper efforts to judge whether the ice shells convect.
The onset of convection is commonly modeled using the technique of linear sta-
bility analysis (Chandrasekhar , 1961; Turcotte and Schubert , 1982), where the balance
of forces acting on a temperature anomaly embedded in an initially conductive fluid
layer is analyzed to determine the conditions under which the anomaly will grow, thus
initiating convection in the layer.

41
The balance of forces in the fluid is expressed by the Rayleigh number,
Ra =ρgα∆TD3
κη, (2.1)
where ρ is the density of the fluid, g is the acceleration of gravity, α is the coefficient
of thermal expansion, ∆T is the temperature difference between the surface and the
bottom of the convecting layer, κ is the thermal diffusivity, and η is the fluid viscosity.
Convection can begin if the Rayleigh number of the ice shell exceeds the critical Rayleigh
number (Racr). For ice with a temperature-dependent viscosity, the critical Rayleigh
number is a function of the rheology of the ice, the boundary conditions used in the
model of the ice shell, and the wavelength of the initial convective upwelling.
A large volume of experimental data and observations exist regarding the rheol-
ogy of ice I in terrestrial and planetary contexts (Durham and Stern, 2001 and references
therein). Recent laboratory experiments seeking to clarify the deformation mechanisms
responsible for flow in terrestrial ice sheets suggest that a composite flow law which
includes terms due to diffusional flow, grain boundary sliding, basal slip, and disloca-
tion (Goldsby and Kohlstedt , 2001) creep can match both viscosity measurements from
terrestrial ice sheets (Peltier et al., 2000) and previous laboratory experiments.
The deformation mechanisms that accommodate large convective strains in ice
I and their governing parameters appropriate for the icy Galilean satellites are by no
means certain. However, because so many of the governing parameters of icy satellite
convection are poorly constrained, we study the implications of the flow law determined
by Goldsby and Kohlstedt (2001) for convection in the outer ice I shells of the Galilean
satellites, paying particular attention to the non-Newtonian behavior of ice, which has
not been widely employed in previous models of the satellites.
If the ice shell has a grain size of order 1 mm, the strain associated with growing
convective plumes in an ice shell in the Galilean satellites is accommodated by grain
boundary sliding and basal slip, which yield non-Newtonian viscosities for ice dependent

42
on temperature and stress. As a result, the viscous restoring force retarding plume
growth depends on strain rate. Therefore, the critical Rayleigh number is a function of
the initial conditions in the ice shell in addition to the ice rheology, boundary conditions,
and wavelength of convective upwelling.
Numerical studies regarding the onset of convection in a non-Newtonian, basally
heated fluid layer define the critical Rayleigh number as the minimum value of Rayleigh
number where convection cannot occur regardless of initial conditions (Solomatov, 1995
and references therein). This definition of Rayleigh number is directly relevant to terres-
trial planets because it can be used to address the conditions under which convection in
a planetary mantle will cease as the radiogenic heating that drives convection decreases
with time.
Unlike terrestrial planets, icy satellites can receive bursts of heat due to tidal
dissipation relatively late in their evolutionary histories. If an ice shell is convecting
when tidal dissipation begins, and the heat generated within the ice exceeds the max-
imum convective heat flux, which is controlled by the ice rheology, the shell will melt
at its base and thin. If the layer thickness drops below a critical value, convection will
cease. The value of critical layer thickness where convection is no longer possible can be
estimated using the Rayleigh number characterized by Solomatov (1995). However, if
the ice shell is in conductive equilibrium when tidal dissipation begins, the viscosity of
the motionless ice would be large, and a large temperature anomaly would be required
to soften the non-Newtonian ice layer enough to permit convection.
A loosely analogous situation can occur on Earth, beneath the continents where
thickened non-Newtonian lithosphere can become gravitationally unstable and form
plumes that sink into the mantle. Numerical simulations and experiments suggest that
the growth rate of lithospheric thickness perturbations depends on a power law of the
perturbation amplitude (Molnar et al., 1998). Thus, the critical Rayleigh number for
the onset of sublithospheric convection depends on a power of the perturbation am-

43
plitude. We can expect, therefore, that the critical Rayleigh number for convection
in non-Newtonian ice will be strongly dependent on the physical characteristics of the
temperature anomalies within the ice shell, specifically their amplitude and wavelength.
To determine the conditions required to trigger convection from a conductive
equilibrium in a non-Newtonian ice I shell, we determine the critical Rayleigh number for
the onset of self-sustaining convection in ice with grain boundary sliding and basal slip
rheologies, for a range of initial conditions. We develop an algebraic relationship between
the critical Rayleigh number and the initial conditions within the ice shell, surface
temperature of the satellite, melting temperature of ice, and rheological parameters so
that our results may be extrapolated for use with other rheologies or within a generic
large pure-water-ice satellite. We use this scaling between critical Rayleigh number,
initial conditions, and rheological parameters to determine what conditions are required
to trigger convection in conductive ice shells in Europa, Ganymede, and Callisto.
2.3 Methods
2.3.1 Numerical Implementation of Ice I Rheology
The laboratory experiments of Goldsby and Kohlstedt (2001) characterize creep
in ice I due to four different deformation mechanisms resulting in a composite flow law,
εtotal = εdiff + εdisl +
(
1
εbs+
1
εGBS
)−1
. (2.2)
The composite flow law includes contributions from diffusional flow (diff ), disloca-
tion creep (disl), and grain-size-sensitive creep (GSS), where deformation occurs by
both grain boundary sliding-accommodated basal slip (bs, basal slip) and basal slip-
accommodated grain boundary sliding (GBS) (Goldsby and Kohlstedt , 2001). Basal slip
and GBS are dependent mechanisms and both must operate simultaneously to permit
deformation. When responsible for flow, the total strain rate for GSS is controlled by
the slower of the two mechanisms (Durham and Stern, 2001).

44
The strain rate for each creep mechanism in the composite rheology is described
by
ε = Aσn
dpexp
(−Q∗
RT
)
, (2.3)
where ε is the strain rate, A is the pre-exponential parameter, σ is stress, n is the stress
exponent, d is the grain size of the ice, p is the grain size exponent, Q∗ is the activation
energy, R is the gas constant, and T is temperature. Rheological parameters used in
our models are summarized in Table A.2.
For T > 255 K, Goldsby and Kohlstedt (2001) present an alternate set of creep
parameters, which yield a faster creep rate for GBS in ice near the melting point,
consistent with terrestrial observations. The enhancement of creep rate is caused by
pre-melting of the ice at grain boundaries and grain edges which causes the ice to have
a low viscosity. We do not include the creep enhancement near the melting point of ice
for numerical simplicity. We briefly discuss the effects of including the high temperature
creep enhancement term in section 2.6.
The strain rate from diffusion creep is described by
ε =ADF Vmσ
RTmd2
(
Dv +πδ
dDb
)
(2.4)
where ADF is a dimensionless constant, Vm is the molar volume, Tm is the melting
temperature of ice, Dv is the rate of volume diffusion, δ is the grain boundary width,
and Db is the rate of grain boundary diffusion. For small strains (1%), ADF = 42, but
larger strains may yield larger values of ADF and enhanced creep rates due to diffusional
flow (Goodman et al., 1981); here, we use ADF = 42 (Goldsby and Kohlstedt , 2001).
For a range of grain sizes close to values estimated for the Galilean satellites’ ice
shells (0.1 to 100 mm), the grain size is much larger than the grain boundary width
(9.04 × 10−10 m) (Goldsby and Kohlstedt , 2001), so volume diffusion dominates over
grain boundary diffusion, and we may ignore its contribution to the strain rate. The

45
strain rate for volume diffusion is:
ε =42Vmσ
RTmd2Do,v exp
(−Q∗
v
RT
)
(2.5)
where Do,v is the volume diffusion rate coefficient and Qv is the activation energy. The
viscosity of ice for volume diffusion is Newtonian, but does depend on grain size. The
parameters for volume diffusion are listed in Table A.2, where we have grouped the
pre-exponential parameters to calculate an effective A = (42VmDov/RTm).
The deformation mechanism that yields the highest strain rate for a given temper-
ature and differential stress is judged to dominate flow at that temperature and stress
level. At low stresses, Newtonian diffusional flow is dominant, but at higher stresses,
the non-Newtonian creep mechanisms are activated. The transition stress between dif-
fusional flow and grain boundary sliding is
σT =
(
AGBS
Adiff
dpdiff
dpGBSexp
((Q∗
diff − Q∗GBS)
RT
))1
ndiff−nGBS
, (2.6)
and a similar expression can be obtained for the transition stress between diffusional
flow and basal slip. The transition stress between GBS and diffusional flow for ice near
the melting temperature with a grain size of 1.0 mm is 0.02 MPa. If the grain size of
ice is 0.1 mm, the transition stress increases to 0.1 MPa; with a grain size of 100 mm,
the transition stress is 6 × 10−4 MPa.
The non-Newtonian deformation mechanisms will control the growth of convective
plumes if the thermal stress due to a growing plume exceeds the transition stress between
diffusional flow and GSS creep. The thermal stress due to a growing plume of height λ,
warmer than its surroundings by δT , is approximately σth ∼ ρgαδTλ. In an ice shell
50 km thick on Europa, Ganymede, or Callisto, a plume with λ = D and δT = 5 K can
generate a thermal stress of 0.03 MPa. In an ice shell 25 km thick, a plume of height
approximately 25 km can generate 0.015 MPa. For reasonable plume sizes and grain
sizes of ice, the thermal stress associated with a growing plume exceeds the transition

46
stress between GBS and diffusional flow, indicating that GBS can control plume growth
in ice with a grain size of order 1.0 mm.
The thermal stress associated with the onset of convection in ice with a plausible
range of grain sizes is close to the transition stress between the Newtonian and non-
Newtonian deformation mechanisms. For this reason, the composite Newtonian and
non-Newtonian rheology for ice I is implemented in Chapter 3. In this initial study, we
focus on the growth of initial convective plumes large enough to activate GBS and basal
slip, rather than growth of perturbations by diffusional flow. In this way we begin to
characterize the behavior of a non-Newtonian ice shell during the onset of convection.
2.3.2 Numerical Convection Model
The dynamics of thermal convection are controlled by the Rayleigh number, a
single dimensionless parameter that expresses the balance between thermal buoyancy
forces and the viscous restoring force. Large values of Ra indicate vigorous convection;
convection cannot occur unless the Rayleigh number exceeds the critical Rayleigh num-
ber (Racr). We adopt a reference Rayleigh number for the ice shell from Solomatov
(1995)
Ra1 =ρgα∆TD(n+2)/n
(κdpA−1)1/n exp( Q∗
nRTm
) (2.7)
where Tm is the melting temperature of the ice shell, and values of the rheological
parameters are taken directly from the lab-derived flow laws from Goldsby and Kohlstedt
(2001). An explicit temperature- and strain-rate-dependent rheology of form
η =
(dp
A
)1/n
ε(1−n)/nII exp
(Q∗
nRT
)
(2.8)
is used, where εII is the second invariant of the strain rate tensor. Thermal and physical
parameters used in our models are summarized in Table A.1. The reference Rayleigh
number is obtained from the nominal definition of Rayleigh number (2.1) by explicitly
evaluating the non-Newtonian viscosity of ice at a reference strain rate of εo = κ/D2

47
and a reference temperature equal to the melting temperature of ice. The convective
strain rates in the ice shells are not well-constrained, so we choose this definition of
reference strain rate to reduce the number of free parameters in the Rayleigh number.
When a stress is applied to non-Newtonian ice, the strain rate increases as the
ice flows to relieve the stress, and as the ice flows, its viscosity decreases. This feedback
causes the strain rates in the warm convecting sublayer of the ice shell to naturally evolve
to values some 103 times higher than the reference strain rate, and the viscosity of the
ice shell to evolve to values substantially lower than the reference viscosity. Typical
values of viscosity at the melting point during the onset of convection are of order 1014
Pa s for basal slip, and 1015 Pa s for GBS (see Figure 2.1).
A more physically intuitive effective Rayleigh number for the ice shell can be
obtained after the convection simulation is completed, by re-evaluating the Rayleigh
number using the viscosity value during the onset of convection, rather than the ref-
erence viscosity (Malevsky and Yuen, 1992). In our simulations, the melting point
viscosities are smaller by a factor of ∼ 100 than the reference viscosity, yielding effective
Rayleigh numbers of order 106 to 107.
The above rheology has been incorporated into the finite-element convection
model Citcom (Moresi and Gurnis, 1996; Zhong et al., 1998, 2000), which solves the
governing equations of thermally-driven convection in an incompressible fluid. Our sim-
ulations are performed in a 2D Cartesian geometry, free-slip boundary conditions are
used on the surface (z = 0), base (z = −D), and side walls of the domain (x = 0, xmax).
All simulations in this study were performed in a domain with 32 x 32 elements, chosen
to resolve the bottom thermal boundary layer while allowing sufficient coverage of our
large parameter space given limited computational resources.
The domain is basally heated so we do not include the effects of tidal dissipation,
but discuss its probable role in triggering convection in section 2.7. The surface of the
convecting region is held constant at a temperature appropriate for the temperate and

48
equatorial surface of a jovian icy satellite, which we vary in our study from 90 K to
120 K. The base of the domain is held at a constant temperature equal to the melt-
ing temperature of the ice shell, Tm. We use a value of Tm = 260 K for the majority
of simulations shown here, but discuss the effects of varying the melting temperature
by 10 K in section 2.4.3. We have not taken into account the thermal or rheologi-
cal effects of potential contaminant non-water-ice materials such as hydrated sulfuric
acid, or hydrated sulfate salts, which have been suggested to exist on Europa’s surface
based on near-infrared spectroscopy (Carlson et al., 1999; McCord et al., 1999), or high
temperature creep enhancement (see section 2.3.1).
With these modifications in place, our model was benchmarked using results for a
Newtonian, temperature-linearized flow law with large viscosity contrasts (Moresi and
Solomatov , 1995). Results using a non-Newtonian rheology were compared to results for
a temperature-linearized flow law with n = 3 and large viscosity contrasts (Christensen,
1985). In the vast majority of cases, our results for convective heat flux (Nu) and the
internal average temperature agree with published results to within 1%.
2.3.3 Initial Conditions
The approach we use to numerically determine the critical Rayleigh number is
similar to linear stability analysis (Turcotte and Schubert , 1982; Chandrasekhar , 1961).
The convection simulations are started from an initial condition of a conductive ice shell
plus a temperature perturbation expressed as a single Fourier mode:
T (x, z) = Ts −z∆T
D+ δT cos
(2πD
λx
)
sin
(−zπ
D
)
(2.9)
where δT and λ are the amplitude and wavelength of the perturbation, and z = −D at
the warm base of the ice shell. Use of free-slip boundary conditions requires that the
width of the computational domain (xmax) be equal to one half the wavelength of initial
perturbation. The simulation is run for a short time to determine whether the initial
49
perturbation grows and convection begins, or decays with time due to thermal diffusion
and viscous relaxation, causing the ice layer to return to a conductive equilibrium. For a
given initial condition, we run a series of convection simulations with decreasing values
of Ra1. The critical Rayleigh number is defined as the minimum value of Ra1 where
the system convects for a given initial condition, and here is determined to within two
significant figures.
The kinetic energy of the fluid layer is used as a diagnostic for the vigor of
convection. The kinetic energy is
E ≡
∫ xmax
0
∫ D0 (v2
x + v2z)dxdz
∫ xmax
0
∫D0 dxdz
(2.10)
where xmax is the width of the numerical domain and vx, vz are the horizontal and
vertical fluid velocities, respectively. If the kinetic energy of the fluid grows with time
during the opening stages of the simulations when initial plumes develop, the layer is
judged to convect; if the kinetic energy decays with time, the layer does not convect
and the system returns to conductive equilibrium.
For simple rheologies (isoviscous, only temperature- or stress-dependent), the
kinetic energy of the fluid layer grows exponentially or quasi-exponentially with time as
the initial perturbation grows and convection begins. This quasi-exponential behavior
forms the basis for existing numerical methods of determining Racr for fluids with
simpler rheologies (Zhong and Gurnis, 1993; Korenaga and Jordan, 2003). For a non-
Newtonian fluid, we find that the growth of kinetic energy with time is more complex,
and is not readily analyzed mathematically. Although the kinetic energy may increase
initially, indicating growth of the initial perturbation, after some time has elapsed, the
fluid velocities can decrease as the system returns to conductive equilibrium. As a result,
the outcome of the simulation cannot be judged by looking solely at the initial growth
or decay of the kinetic energy. Therefore, we run our simulations for roughly 20% of
the thermal diffusion time (τdiff ∼ D2/κ), to determine whether the layer ultimately

50
returns to a conductive equilibrium or convects. The key advantage of this procedure is
that the final outcomes of our simulations are clearly self-sustaining convective states,
and not transient, quasi-stable states that convect briefly and return to conductive
equilibrium at a later time. The temperature field, velocity vectors, and viscosity fields
for a sample simulation where Ra = Racr for the basal slip rheology is shown in Figure
2.1. A sample graph of the evolution of kinetic energy over time is shown in Figure 2.2.
2.4 Model Results
2.4.1 Critical Rayleigh Number
The viscous restoring force that counteracts the buoyancy of a growing plume is
wavelength-dependent, so the critical Rayleigh number for convection will depend on
the wavelength of the perturbation, regardless of the rheology of the fluid. The critical
values of Rayleigh number (Racr) reported here are critical values of Ra1. We first
determine the wavelength that minimizes the value of Racr, then investigate how Racr
for that specific Fourier mode with λ = λcr varies with δT .
We find two regimes of behavior of the non-Newtonian ice shell. For small tem-
perature perturbations less than the rheological temperature scale (∆Trh), the critical
Rayleigh number depends on the amplitude of perturbation to a power θ. This is desig-
nated the power-law regime. For temperature perturbations greater than the rheological
temperature scale, the critical Rayleigh number approaches a constant value and is in-
dependent of the perturbation amplitude. This is designated the asymptotic regime.
The transition between the two regimes of behavior occurs when δT > ∆Trh,
∆Trh =1.2(n + 1)RT 2
i
Q∗, (2.11)
where Ti is the roughly constant temperature in the convective interior (Solomatov
and Moresi , 2000). Approximating Ti ∼ Tm, the rheological temperature scale is ap-
proximately 37 K for both rheologies, which corresponds to perturbation amplitudes of

51
-40
-30
-20
-10
0
Dep
th (
km)
0 10 20 30
X (km)
-40
-30
-20
-10
0
Dep
th (
km)
0 10 20 30
X (km)0 10 20 30
X (km)0 10 20 30
X (km)
-40
-30
-20
-10
0
Dep
th (
km)
0 10 20 30
X (km)
120 140160 180200 220 240260
T (K)
0 20 0 10 20 30
X (km)0 10 20 30
X (km)
14 15 16 17 18 19 20 21 22 23
log10η (Pa s)
a) t=0 b) t=0
c) t=5.8 Myr d) t=5.8 Myr
Figure 2.1: Temperature field (panel a) with superimposed velocity vectors, and vis-cosity field (panel b) with superimposed contours of constant viscosity for a sampleinitial condition from our study. The simulation is started with an initial temperatureperturbation of 15 K, and Ra = Racr = 4.0 × 104. This corresponds to an ice shell 49km thick on Ganymede with a surface temperature of 110 K, a melting temperature ofice of 260 K, and a grain size of ice of 1.0 mm. The initial condition evolves over 5.8Myr to generate the temperature and viscosity fields in panels c and d.

52
10-2
10-110-1
100
101
102
0.00 0.05 0.10 0.15 0.20
t’
EEEEEEConvection
No Convection
Figure 2.2: Growth of kinetic energy (E) with non-dimensional time (t’=t/τdiff ) for icewith GBS rheology with Ts = 110 K and Tm = 260 K, given an initial perturbation ofamplitude 0.75 K. Each line represents the evolution of kinetic energy for a simulationwith a different Rayleigh number from Ra1 = 1.8 × 105 (top line) to Ra1 = 1.3 × 105
(bottom line). After an initial phase of quasi-exponential growth of kinetic energy (fort′ < 0.05), the kinetic energy grows super-exponentially as convection begins. Wherekinetic energy does not grow, convection did not initiate. The highest Rayleigh numberthat resulted in convection, 1.6 × 105, is the critical Rayleigh number for this rheologyand set of boundary temperatures.

53
0.22∆T to 0.25∆T for the range of boundary temperatures considered here.
For a nominal set of boundary temperatures Ts = 110 K and Tm = 260 K, the
wavelength that minimizes Racr for both GBS and basal slip rheologies in the power law
regime is ∼ 1.5D, which does not change with the amplitude of perturbation. Figure
2.3 shows how Racr varies with wavelength for both rheologies, for the nominal set of
boundary temperatures. These values are substantially lower than λcr for an isoviscous
fluid (Turcotte and Schubert , 1982). This is likely because in a fluid with strongly
temperature-dependent rheology, initial fluid motions are confined to the bottom ∼30%
of the shell, decreasing the effective aspect ratio of the convecting region. The critical
Rayleigh number for the GBS and basal slip rheologies varies by a factor of two between
the minimum value when λ = λcr and the maximum value of wavelength used, λ = 3D.
In the asymptotic regime, 1.8D < λcr < 2.2D, and the critical Rayleigh number is very
weakly dependent on wavelength, varying by only 20% as λ is increased from 1.2D to
2.2D.
As discussed in section 2.3.1, the non-Newtonian deformation mechanisms begin
to control the growth of a perturbation at the base of the ice shell when the thermal
stress associated with the plume (σth ∼ ρgαδTλ) exceeds ∼ 0.02 MPa in ice with a
nominal grain size of 1.0 mm. For the average maximum permitted ice shell thickness
in Ganymede and Callisto of 170 km, a perturbation of 0.75 K above the ambient
conductive equilibrium spread across a horizontal distance ∼ D can generate ∼ 0.02
MPa, sufficient to activate grain boundary sliding and basal slip in ice with a grain size
of order 1 mm. In a relatively thin ice shell with D ∼ 20 km, a perturbation of ∼ 15
K is required to activate the non-Newtonian deformation mechanisms. These values
supply the minimum and maximum perturbation amplitude δT that we use, 0.005∆T
and 0.1∆T .
In the power law regime, the critical Rayleigh number varies as a power of the

54
0
25000
50000
75000
100000
Ra 1
1.0 1.5 2.0 2.5 3.0 3.5 4.0
Wavelength (λ/D)
0
25000
50000
75000
100000
Ra 1
1.0 1.5 2.0 2.5 3.0 3.5 4.0
Wavelength (λ/D)
0
25000
50000
75000
100000
Ra 1
1.0 1.5 2.0 2.5 3.0 3.5 4.0
Wavelength (λ/D)
0
25000
50000
75000
100000
Ra 1
1.0 1.5 2.0 2.5 3.0 3.5 4.0
Wavelength (λ/D)
GBS
Basal Slip
Figure 2.3: Critical Rayleigh number as a function of dimensionless wavelength forbasal slip rheology (diamonds) and grain boundary sliding rheology (GBS, dots) withTs = 110 K and Tm = 260 K. A constant perturbation amplitude of δT = 7.5 K is usedhere.

55
Table 2.1: Variation in Critical Rayleigh Number with Perturbation Amplitude
Rheology δT/∆T Racr
Basal Slip 0.005 1.2 × 105
0.010 8.0 × 104
0.025 4.6 × 104
0.050 3.1 × 104
0.075 2.4 × 104
0.100 2.0 × 104
Grain Boundary Sliding 0.005 1.6 × 105
0.010 1.2 × 105
0.025 7.7 × 104
0.050 5.5 × 104
0.075 4.6 × 104
0.100 4.0 × 104
amplitude of initial perturbation, obeying a relationship of form
Racr = Racr,0
(δT
∆T
)−θ
(2.12)
where Racr,0 and θ are determined with a least-squares fit to values of Racr in log-log
space. Figure 2.4 shows a sample set of Racr data for Ts = 110 K and Tm = 260 K for
both the GBS and basal slip rheologies, with values used in the plot listed in Table 2.1.
Figure 2.5 shows values of Racr in the power law and asymptotic regimes for basal slip
rheology with Ts = 110 K and Tm = 260 K.
Regardless of the boundary temperatures, the critical value of Ra1 varies by
approximately an order of magnitude over the range of δT explored. The onset of
convection is governed largely by the viscosity structure near the base of the ice shell,
which is controlled by the rheological temperature scale (Davaille and Jaupart , 1994):
∆Tη =−η(Tm)
∂η∂T
∣∣∣Tm
. (2.13)
For the form of rheology used here, the rheological temperature scale is given by
∆Tη =nRT 2
m
Q∗∆T, (2.14)

56
104
105105
Ra 1
1 2 5 10 20δT (K)
104
105105
Ra 1
1 2 5 10 20δT (K)
104
105105
Ra 1
1 2 5 10 20δT (K)
104
105105
Ra 1
1 2 5 10 20δT (K)
GBS
Basal Slip
Figure 2.4: Critical Rayleigh number as a function of the amplitude of initial tem-perature perturbation (δT ) for GBS (dots) and basal slip (diamonds) rheologies withTs = 110 K and Tm = 260 K. Lines are least squares fits to the data, where the sloperepresents the fitting coefficient θ in equation (2.12). For GBS, θ = 0.6, for basal slip,θ = 0.5.

57
104
105105
Ra 1
11 10 100δT (K)
104
105105
Ra 1
11 10 100δT (K)
Power Law
Asymptotic
Figure 2.5: Critical Rayleigh number as a function of the amplitude of initial tempera-ture perturbation (δT ) for basal slip rheology with Ts = 110 K and Tm = 260 K. In thepower law regime, for perturbation amplitudes less than ∼ 37 K, the critical Rayleighnumber is a function of perturbation amplitude. For perturbation amplitudes largerthan ∼ 37 K, the critical Rayleigh number reaches a constant value of 1.2 × 104.

58
and can be used to scale Racr,0 using:
Racr,0 = Ra0,0 + M∆Tη (2.15)
where M and Ra0,0 are the derived fitting coefficients.
In the asymptotic regime, the critical Rayleigh number does not depend on the
amplitude of temperature perturbation, and approaches an asymptotic value Raa. Val-
ues of Raa using λcr = 2.0D and δT = 0.35∆T are listed in Table 2.3.
Given a set of boundary temperatures, and amplitude of temperature pertur-
bation, the critical Rayleigh number in the power law regime can be estimated by
combining equations (2.12), (2.14), and (2.15):
Racr =
[
Ra0,0 + M
(nRT 2
m
Q∗∆T
)](δT
∆T
)−θ
. (2.16)
Values of the fitting coefficients Ra0,0, θ and M for both grain boundary sliding and basal
slip rheologies are shown in Table 2.2. We report Ra0,0 and M values for Tm = 260 K
only, and briefly discuss the effects of varying the melting temperature in section 2.4.3.
The expression for Racr in the power law regime is likely only valid when the ice
shell is in the stagnant lid convection regime, where viscosity contrast across the layer
is large and convective instability is limited to the warm, low-viscosity sub-layer near
the base of the ice shell. For the ice shell to be in the stagnant lid regime, the viscosity
contrast due to temperature alone, ∆ηT = (η(Ts)/η(Tm)) exceeds exp(4(n + 1)), or
7×104 for GBS and 8×105 for basal slip (Solomatov , 1995). For the range of boundary
temperatures used here, ∆ηT ranges from 2 × 106 to 2 × 1010 for GBS and 7 × 105 to
3 × 109 for basal slip.

59
Table 2.2: Numerically Determined Fitting Coefficients for Racr
Rheology Ra0,0 θ M
Grain Boundary Sliding 5.1 × 104 0.6 −2.7 × 105
Basal Slip 1.7 × 104 0.5 −7.7 × 104
2.4.2 Critical Shell Thickness
The critical shell thickness for the onset of convection due to small temperature
perturbations δT < ∆Trh can be obtained using the definition of Ra1:
Dcr =
(
Racr
(κdpA−1
)1/nexp
( Q∗
nRTm
)
ρgα∆T
)n/(n+2)
, (2.17)
where the value of Racr can be estimated using equation (2.16). The values of critical
Rayleigh number in the asymptotic regime can be used to determine an absolute lower
limit on the ice shell thickness required for convection. The lower limit on shell thickness
is obtained from Raa using:
Da =
(
Raa
(κdpA−1
)1/nexp
( Q∗
nRTm
)
ρgα∆T
)n/(n+2)
. (2.18)
In the power law regime, the critical grain size required to initiate convection in an ice
layer with thickness D is
dcrit =
(ρgαD(n+2)/n
(κA−1
)1/nexp
( Q∗
nRTm
)Racr
)n/p
. (2.19)
For d < dcr, convection can occur; for d > dcr the ice is too stiff to convect for the
given initial condition. The asymptotic value of Rayleigh number can also be used to
determine an upper limit on the grain size that can permit convection in a layer of
thickness D:
da =
(ρgαD(n+2)/n
(κA−1
)1/nexp
( Q∗
nRTm
)Raa
)n/p
. (2.20)
2.4.3 Variation of Melting Temperature
Two sets of simulations were run to quantify how much the critical Rayleigh
number is influenced by changing the melting temperature. In the case of GBS, Ts = 110

60
K and Tm = 270 K were used to obtain a relationship between δT and Racr. The
resulting values of Racr,0 and θ were compared to the values obtained when Tm = 260
K. For basal slip, procedure was repeated, using Tm = 250 K. In both cases, the fitting
coefficients obtained were different from their Tm = 260 K counterparts by only 1%. Use
of equation (2.16) for alternative melting temperatures between 250 K and 270 K is valid
for Racr to two significant figures, provided the high temperature creep enhancement
in ice near its melting point is not included in the rheology.
2.5 Comparison to Existing Studies
For simple rheologies, the critical Rayleigh number for convection in a fluid can be
obtained using linear stability anaylsis (Turcotte and Schubert , 1982; Chandrasekhar ,
1961). However, the critical Rayleigh number for the onset of convection in a non-
Newtonian fluid cannot be determined using linear stability analysis (Tien et al., 1969;
Solomatov , 1995). The viscosity of a non-Newtonian fluid depends on both temperature
and strain rate, so the viscosity in the perturbed layer of fluid depends on the amplitude
of the initial perturbation and becomes infinite as the amplitude of perturbation becomes
small (Solomatov , 1995). Convection in a non-Newtonian fluid with a temperature- and
strain-rate-depdendent rheology is always a finite-amplitude instability, and cannot be
readily analyzed analytically (Solomatov , 1995).
Analysis of the onset of convection in a fluid with stress-dependent (but not
temperature-dependent) rheology can provide constraints on how the non-Newtonian
behavior affects Racr. An alternative method of determining Racr for a non-Newtonian
fluid stems from a physical argument put forth by Chandrasekhar (1961), who pos-
tulated that the critical Rayleigh number occured at a critical temperature gradient
where the dissipation of energy by viscous forces in the system exactly balanced the
release of energy from the rising, thermally buoyant plume. Using an energy balance
argument, Tien et al. (1969) were able to calculate the critical Rayleigh number for

61
non-Newtonian fluids with a range of values of stress exponent, which compared fa-
vorably to their laboratory measurements of critical Rayleigh number for fluids with
stress-dependent rheologies.
The most widely-used results for the critical Rayleigh number for convection in a
non-Newtonian fluid arise from the pivotal study of Solomatov (1995), who built upon
the analysis of Tien et al. (1969) plus additional studies by Ozoe and Churchill (1972)
to consider a stress- and temperature-dependent rheology. With the knowledge that
the critical Rayleigh number for a non-Newtonian fluid depends on initial conditions,
Solomatov (1995) characterized the value of Rayleigh number where convection could
not occur, regardless of initial conditions.
The analysis of Solomatov (1995) focused on the behavior of the bottom thermal
boundary layer at the onset of convection. If the viscosity of the fluid depends strongly
on temperature, there are no fluid motions in the upper part of the convecting layer,
forming a stagnant lid. In the stagnant lid regime, convective motions are confined to
a warm sub-layer of the ice shell, where the temperature dependence of viscosity can
be neglected by evaluating the viscosity of the material at the mean temperature in the
sub-layer.
With this approximation, the critical Rayleigh number of the sub-layer can be
evaluated by assuming that the viscosity of ice depends only on stress, thus using the
results of Tien et al. (1969) and Ozoe and Churchill (1972). Convection in the entire
layer initiates when the local Rayleigh number of the bottom thermal boundary layer
exceeds a critical value. The critical Rayleigh number for entire fluid layer can therefore
be related to the critical Rayleigh number of the sub-layer.
To closely follow the analysis of Solomatov (1995), we non-dimensionalize our
rheology (equation 2.8) as
η′(T ′, ε′) = C1/nε′(1−n)/n exp
(
E
T ′ + T ′o
−E
1 + T ′o
)
(2.21)

62
Table 2.3: Comparison to Analysis of Solomatov (1995)
Rheology Ts (K) Raa (our study) Racr (Solomatov (1995))
Grain Boundary Sliding 90 3.1 × 104 2.3 × 104
100 2.7 × 104 1.9 × 104
110 2.2 × 104 1.5 × 104
120 1.9 × 104 1.2 × 104
Basal Slip 90 1.4 × 104 8.4 × 103
100 1.2 × 104 7.1 × 103
110 9.8 × 103 5.9 × 103
120 8.6 × 103 4.8 × 103
where C represents the pre-exponential parameters in the laboratory-derived flow law,
E = Q∗/(nR∆T ) is the non-dimensional activation energy, and T ′o = Ts/∆T is the
non-dimensional reference temperature.
The Rayleigh number of the unstable sub-layer of thickness zsub at the base of
the fluid layer is given by Solomatov (1995) as:
Rasub =ρgα∆Tz
2(n+1)/nsub
D(κC)1/n
exp
(E
1 + T ′o
−E
(1 − (zsub/2) + T ′o
)
(2.22)
where the viscosity is evaluated at the mean temperature in the sub-layer, T ′ = 1 −
(zsub/2), and the strain rate has been evaluated at κ/z2sub, the characteristic strain rate
in the sub-layer. The sub-layer reaches its maximum thickness and becomes convectively
unstable when the local Rayleigh number in the sub-layer is equal to the critical Rayleigh
number for a fluid with stress-dependent rheology:
Rasub(zmax) = Racr(n). (2.23)
The results of Tien et al. (1969) and Ozoe and Churchill (1972) are summarized and
extrapolated by Solomatov (1995) to obtain an approximation for the critical Rayleigh
number of a fluid with an arbitrary stress exponent:
Racr(n) ∼ Racr(1)1/nRacr(∞)(n−1)/n (2.24)

63
with Racr(1) = 1568, and Racr(∞) ∼ 20 represents the formal asymptotic limit of
Racr(n) for n → ∞.
The maximum sub-layer thickness (zmax) is obtained by solving for the value of
zsub that yields ∂Rasub/∂zsub = 0. For the form of temperature dependence used here,
we obtain a quadratic equation for zmax as a function of the non-dimensional activation
energy, stress exponent, and reference temperature. The quadratic equation yields two
results, but only the negative root yields physically applicable solutions where zsub < D:
zmax =D
2(n + 1)
(4(n + 1)(T ′
o + 1) + En − (8En(n + 1)(T ′o + 1) + E2n2)
)1/2. (2.25)
Substituting this value of zmax into equation (2.22) we obtain
Rasub =ρgα∆TD(n+2)/n
(κC)1/n
(zmax
D
)2(n+1)/n
exp
(E
1 + T ′o
−E
1 − zmax
2D + T ′o
)
. (2.26)
When using the non-dimensional rheology of form eq. (2.21), the viscosity at the melting
point and reference strain rate is equal to C1/n. Therefore, the first term in the above
equation is simply the critical Rayleigh number of the entire fluid layer, with η(Tm, εo).
Setting the expression for Rasub = Rasub(zmax) and solving for Racr we obtain:
Racr = Racr(n)
(zmax
D
)−2(n+1)/n
exp
(E
1 − zmax
2D + T ′o
−E
1 + T ′o
)
. (2.27)
Values of Racr from this analysis are compared to our numerically determined values of
critical Rayleigh number in the limit of the maximum permitted temperature pertur-
bation, δT → ∆Trh, Raa. The values of Raa from our study are summarized in Table
2.3. Agreement between our values of critical Rayleigh number and values obtained
using the method of Solomatov (1995) agree to within 35 to 60%. The variation in
Racr according to equation (2.27) is compared to numerically calculated values of Raa
in Figure 2.6.

64
0
10000
20000
30000
Ra c
r
80 90 100 110 120 130 140Ts (K)
0
10000
20000
30000
Ra c
r
80 90 100 110 120 130 140Ts (K)
0
10000
20000
30000
Ra c
r
80 90 100 110 120 130 140Ts (K)
GBS
Basal Slip
Figure 2.6: Comparison of our values of asymptotic critical Rayleigh number (Raa)calculated using λ = 2.0D and δT = 0.35∆T (dots=GBS, diamonds=basal slip) tocritical Rayleigh numbers calculated using the analysis of Solomatov (1995) (curves,bold=GBS, thin=basal slip), for various surface temperatures. Agreement between ourvalues and the analysis of Solomatov (1995) ranges from ∼ 35% to 60% as a functionof surface temperature.

65
2.6 Implications for the Icy Galilean Satellites
Gravity data do not place tight constraints on the thickness of the ice shells of any
of the icy Galilean satellites. The maximum thickness of Europa’s H2O layer is ∼ 170
km, but the fraction of the layer that is liquid is poorly constrained (Anderson et al.,
1998). The upper bounds on ice I shell thickness for all the icy satellites are obtained
by estimating the depth to the minimum melting point of ice I. The minimum melting
point occurs at a depth of approximately 170 km in Europa, 160 km in Ganymede, and
180 km in Callisto, if the density of the ice shell is 930 kg/m3 (Kirk and Stevenson,
1987; Ruiz , 2001). The grain sizes in the icy satellites are poorly constrained as well,
with estimates of grain size spanning eight orders of magnitude, from microns (Nimmo
and Manga, 2002) to meters (Schmidt and Dahl-Jensen, 2004). Conclusions regarding
the convective stability of the ice shells made here may not be correct if the grain sizes
in the satellites are much larger than 1 cm or smaller than 0.1 mm. Additionally, it is
plausible that the Goldsby and Kohlstedt (2001) rheology does not adequately describe
the true behavior of the ice shells of the Galilean satellites, for example, if impurities
have a significant effect on rheology. Moreover, we have ignored internal heating by
tidal dissipation in these calculations, a topic addressed in section 2.7.
If the high-temperature creep enhancement described in section 2.3.1 were in-
cluded in our models, the viscosities of ice at the base of the ice shell would be much
smaller, potentially permitting convection in significantly thinner ice shells. As the be-
havior of the convecting layer transitioned from initial plume growth to well-developed
convecting cells, the entire convecting sublayer of the ice shell could have a very low
viscosity due to the high-temperature softening. Because we have not included this
term, the critical ice shell thicknesses calculated using our models yield upper limits
on the shell thicknesses required for convection. More detailed calculations should be
performed in the future including this term in the rheology to investigate how high-

66
temperature softening of the ice affects both the onset of convection and the pattern of
convection.
In the likely event that the lab-derived flow law does not perfectly match the
true behavior of ice in the Galilean satellites, and that tidal dissipation plays a role in
modifying the thermal structure of the ice shells during the onset of convection, future
modeling efforts can use methods similar to those discussed here, to investigate more
thoroughly the conditions required to trigger convection in ice I shells.
2.6.1 Conditions for Convection in Callisto and Ganymede
Figure 2.7 shows the critical layer thickness for the onset of convection in Callisto’s
ice I shell for both grain boundary sliding and basal slip rheologies, if the ice has a grain
size of 1.0 mm. Similarly, Figure 2.8 shows the critical shell thickness on Ganymede.
For GBS, if the ice has a grain size of 1.0 mm, the critical shell thickness for convection
in Callisto’s ice shell varies between 103 km and the maximum permitted shell thickness
of 180 km for grain boundary sliding, and 32 km and 80 km for basal slip. In Ganymede,
if the ice has a grain size of 1.0 mm, the critical shell thickness ranges from 96 km to
greater than the maximum allowed ice shell thickness of 160 km, depending on surface
temperature. If flow is controlled by basal slip (which seems unlikely because the rate-
limiting flow law in the GSS deformation mechanism is GBS), the critical shell thickness
in Ganymede ranges from 30 km to 74 km.
In the more likely case that GBS is the controlling rheology, the largest initial
perturbation in this study (0.1∆T ) cannot trigger convection in either Ganymede or
Callisto’s ice shells with the nominal boundary temperatures if the ice near the base
of the ice shell has a grain size d > 3 mm (Figures 2.9 and 2.10). If the ice in either
satellite has a smaller grain size, convection can occur provided the requirements on shell
thickness and temperature perturbation are met. For GBS in an ice shell with a d = 1.0
mm and Ts = 110 K, a 5 K temperature perturbation can trigger convection in an ice

67
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
DmaxDmax
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
90 K100 K
110 K120 K
Figure 2.7: Critical ice shell thicknesses (eq. 2.17) for the onset of convection in Callisto’sice shell, with grain boundary sliding (bold curves) or basal slip (thin curves) rheologies,for various surface temperature values. A constant grain size of 1.0 mm for the ice shellsis assumed for GBS, and a constant melting temperature of 260 K is assumed for bothrheologies. The maximum permitted ice shell thickness on Callisto, 180 km, is indicatedby the horizontal dashed line. The critical shell thickness predicted by the basal sliprheology ranges from 32 to 80 km over the range of δT considered.

68
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
DmaxDmax
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200
Dcr
(km
)
0 5 10 15δT (K)
90 K100 K
110 K120 K
Figure 2.8: Similar to Figure 2.7, but for Ganymede. Over the range of δT considered,the critical shell thickness ranges from 96 km to the maximum permitted shell thicknessof 160 km for GBS, which is the rate-limiting creep mechanism.

69
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
Convection
No Convection
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150 180D (km)
90 K
100 K
110 K
120 K
Figure 2.9: Critical grain size for convection as a function of ice shell thickness (equation2.19) in Callisto’s ice shell with GBS rheology for various surface temperatures. Aconstant perturbation δT = 5 K is used here.

70
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
Convection
No Convection
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
90 K
100 K
110 K
120 K
Figure 2.10: Similar to Figure 2.9, but for Ganymede.

71
shell on Callisto ≥ 150 km thick. Under identical circumstances in Ganymede, Dcr is
141 km. The lower limit on ice shell thickness (Da) in the limit of large temperature
perturbations (in the asymptotic regime) varies from 50 to 57 km in Ganymede and 53
to 60 km in Callisto, as a function of surface temperature, if the ice has a grain size of
1.0 mm.
The equilibrium thicknesses for a conductive ice shell in Callisto and Ganymede
(in the absence of tidal dissipation) given the expected present-day radiogenic heating
rate of 4.5 × 10−12 W kg−1 (Spohn and Schubert , 2003), are 148 km, and 128 km
respectively. Triggering convection at present would require a temperature perturbation
of only 5 to 7 K, issued in the mathematical pattern described by equation (2.9) if λ =
λcr. If the perturbation is issued with a larger or shorter wavelength, the temperature
perturbation required to trigger convection will be larger.
Roughly 1.5 billion years ago when concentrations of 40K were higher, and radio-
genic heating rates were twice their present values, the equilibrium ice shell thicknesses
of Callisto and Ganymede would have been 74 km and 64 km, respectively. Triggering
convection in these ancient, thin ice shells of Callisto or Ganymede was only possible if
the grain size of ice was less than ∼ 2.5 mm, even if the amplitude of the temperature
perturbation was greater than ∆Trh. Therefore, initiating convection in an ice shell
may be easier later in the satellite’s history when decreased radiogenic heating allows
for a thicker ice shell.
2.6.2 Conditions for Convection in Europa
Figure 2.11 shows the critical layer thickness for convection in Europa’s ice shell,
with the simplifying assumption that the rapid tidal flexing of the shell does not affect
its rheology and merely results in tidal dissipation that perturbs the temperature field.
If the ice has a grain size of 1.0 mm, the critical shell thickness for the GBS rheology
ranges from 100 km to greater than the maximum permitted shell thickness of 170

72
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
DmaxDmax
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
020406080
100120140160180200220
Dcr
(km
)
0 5 10 15δT (K)
90 K100 K
110 K120 K
Figure 2.11: Similar to Figure 2.7, but for Europa. The critical ice shell thickness rangesfrom 100 km to the maximum permitted shell thickness of 170 km for the GBS rheology,and from 31 to 78 km for basal slip.

73
km; for the basal slip rheology, the critical shell thickness ranges from and 31 km to
78 km. Triggering convection in an ice shell with the nominally accepted thickness
of 20-25 km (Pappalardo et al., 1999; Nimmo et al., 2003) with GBS rheology in the
asymptotic regime with a large temperature perturbation requires the ice has a grain
size ≤ 0.07 − 0.1 mm, respectively. Larger grain sizes lead to stiffer ice, and convection
is not permitted, even if δT ≫ ∆Trh. Figure 2.12 demonstrates that for the GBS
rheology, triggering convection with a temperature perturbation of amplitude 5 K in
the thickest possible ice shell in Europa requires a grain size ≤ 2.0 mm. This conclusion
regarding the grain size is qualitatively similar to the conclusions made by McKinnon
(1999), but consideration of the non-Newtonian rheology adds an additional constraint:
a temperature perturbation must be issued to the ice shell to soften the ice in order to
trigger convection.
2.7 Discussion: The Role of Tidal Dissipation
Tidal dissipation is a likely mechanism to generate temperature anomalies of
order 1-10’s K within the ice shells of tidally flexed satellites. Although estimates of
the total amount of dissipation within Ganymede and Europa exist, how this heat is
distributed within their ice shells is a poorly constrained problem. If tidal dissipation is
concentrated on spatial scales much longer than λcr, triggering convection with may not
be possible even in the thickest ice shells in Ganymede and Europa if ice flows by GBS
only. Tidal heating may concentrate in zones of weakness in the ice shell, providing a
laterally heterogeneous heat source within the ice shell [e.g. Tobie et al., 2004]. Zones
of weakness could form beneath double ridges on Europa, whose upwarped morphology
may be due to thermal and/or compositional buoyancy driven by localized shear heating
generated by cyclical lateral motion along strike-slip faults (Nimmo and Gaidos, 2002).
If the tidal dissipation is concentrated within the ice shells on spatial scales similar to
λcr, convection could be triggered by tidal heating in shells thinner than the maximum

74
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
Convection
No Convection
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
0.0010.001
0.01
0.1
1
d cr (
mm
)
0 30 60 90 120 150D (km)
90 K
100 K
110 K
120 K
Figure 2.12: Similar to Figure 2.9, but for Europa.

75
allowed shell thickness of 160 km in Ganymede and 170 km in Europa.
Tidal dissipation may change the mode of heat transfer across the outer ice I
shells of tidally flexed icy satellites such as Ganymede or Europa during past epochs
of increased tidal activity (Showman and Malhotra, 1997; Hussmann and Spohn, 2004).
We envision two possible scenarios. If the ice shell is initially in conductive equilibrium
when tidal dissipation begins, dissipation would be concentrated where the viscosity of
the ice is such that the tidal forcing time scale is equal to the Maxwell time of the ice,
likely at the warm base of the shell (Ojakangas and Stevenson, 1989). This addition
of heat would raise the local temperature above the conductive equilibrium, potentially
causing the bottom layer of the ice shell to become convectively unstable. Conversely,
if the ice shell is initially convecting when tidal dissipation begins and the heat flux
due to tidal dissipation exceeds the convective heat flux, the ice shell would thin by
melting, and convection would cease McKinnon (1999), and convection would be only
a transient phenomenon occurring only in the beginning stages of passage through an
orbital resonance. The existence of an equilibrium between tidal dissipation and the
convective heat flux is controlled by the actual rheology of the ice shell and the details
of tidal dissipation, both of which are not well constrained.
Given the requirement of a finite-amplitude temperature perturbation to initiate
convection in a non-Newtonian ice shells, tidal dissipation could be required to initiate
convection in all icy satellites. A causal relationship between tidal dissipation and
endogenic resurfacing is supported by the observation that all endogenically-resurfaced
icy satellites in the solar system are presently in or have passed through, an orbital
resonance (Dermott et al., 1988; Showman and Malhotra, 1997; Goldreich et al., 1989).
If this is the case, the endogenic resurfacing on Europa and Ganymede could have
been formed during a brief transient period during which tidal dissipation occurred,
triggering convection. Because Callisto has apparently not undergone tidal dissipation,
its non-Newtonian outer ice I shell may have never convected, and therefore has never

76
experienced endogenic resurfacing.
2.8 Summary
The laboratory-derived composite flow law for ice I implies that the growth of
modest-amplitude (∼ 1-10’s K) temperature perturbations in an ice shell is governed
by non-Newtonian creep mechanisms. Therefore, the initiation of convection depends
on the success of plume growth under the influence of these non-Newtonian deforma-
tion mechanisms, which place stringent requirements on the thickness and grain size of
an ice I shell. In the absence of tidal dissipation, the initiation of convection depends
on growth of temperature perturbations governed by the non-Newtonian rheology of
grain boundary sliding. For temperature perturbations larger than the rheological tem-
perature scale (> 37 K), the critical Rayleigh number is independent of perturbation
amplitude and yields an lower limit on the shell thickness required for convection if ice
deforms by GBS or basal slip only.
In Callisto, the critical shell thickness ranges between 103 km and the maximum
permitted shell thickness of 180 km. In Ganymede, the critical ice shell thickness for
convection controlled by GBS in ice with a nominal grain size of 1.0 mm is between
96 km and the maximum permitted ice I shell thickness of 160 km. In both satellites,
convection can only be triggered by modest temperature perturbations of 1-10’s K if
the grain size is less than 1.0 mm. If larger temperature perturbations are issued to the
ice shell by, for example, tidal dissipation, convection may occur in ice shells with larger
grain sizes.
In Europa, the critical shell thickness for convection ranges from 100 to the max-
imum permitted shell thickness of 170 km, for GBS and a grain size of 1.0 mm. Con-
vection in a Europan ice shell thicker than 100 km can be initiated from modest 1-10’s
K temperature perturbations if the grain size of ice is small, less than 2.0 mm.
Extrapolations of these results to other icy satellites, boundary temperatures,

77
grain sizes, and rheologies can be made using the derived relationships among the phys-
ical, thermal, and rheological parameters of the system and the critical Rayleigh num-
ber. Convection can be initiated from a conductive equilibrium in the non-Newtonian
ice shells of Europa, Ganymede, and Callisto if a temperature perturbation is issued to
the ice shell to soften the ice and permit fluid motion. The critical Rayleigh number and
conditions permitting convection depend on the amplitude and wavelength of tempera-
ture perturbation issued to the ice shell. For the Galilean satellites, large temperature
perturbations of order 10’s K are required to initiate convection in ice shells thinner
than 100 km, regardless of grain size. For perturbation amplitudes greater than 37 K,
the critical Rayleigh number is constant, indicating that regardless of the amplitude of
perturbation, convection may not be possible in ice shells with large grain size. Re-
gardless of the critical ice shell thickness required for convection, the non-Newtonian
behavior of ice requires that a finite-amplitude temperature perturbation be issued to
the shell to trigger convection. Tidal dissipation may be required to generate initial
temperature perturbations, suggesting that convection may only occur in thin outer ice
I shells of satellites when the shell is tidally flexed.

Chapter 3
Onset of Convection in Ice I with Composite Newtonian and
Non-Newtonian Rheology
This chapter has been submitted to the Journal of Geophysical Research:
Barr, A. C. and R. T. Pappalardo (2004), Onset of Convection in Ice I with
Composite Newtonian and non-Newtonian Rheology: Application to the Icy Galilean
Satellites J. Gephys. Res., 2004JE002371, submitted.
3.1 Abstract
Ice I exhibits a complex rheology at temperature and pressure conditions appro-
priate for the interiors of the outer ice shells of Europa, Ganymede, and Callisto. We
use numerical methods to determine the conditions required to trigger convection in
an ice I shell with the stress-, temperature- and grain size-dependent composite rheol-
ogy measured in laboratory experiments by Goldsby and Kohlstedt (2001). The critical
Rayleigh number for convection varies as a power (−0.2) of the amplitude of initial tem-
perature perturbation, for perturbation amplitudes between 3 K and 30 K. The critical
Rayleigh number depends strongly on the grain size of ice, which governs the transi-
tion stresses between the Newtonian and non-Newtonian deformation mechanisms. The
critical ice shell thickness for convection in all three satellites is < 30 km if the ice
grain size is <1 mm. In this case, the relatively low thermal stresses associated with
plume growth are not sufficient to activate weakly non-Newtonian grain-size-sensitive

79
(GSS) creep, so plume growth is controlled by Newtonian volume diffusion. The critical
shell thickness is <30 km for grain sizes >1 cm, where thermal stresses can activate
strongly non-Newtonian dislocation creep, and the ice softens as it flows. For interme-
diate grain sizes (1-10 mm), weakly non-Newtonian grain-size-sensitive creep controls
plume growth, yielding critical shell thicknesses close to the maximum permitted shell
thickness for each of the Galilean satellites. Regardless of the rheology that controls
initial plume growth, a finite amplitude temperature perturbation is required to soften
the ice to permit convection, and this may require tidal dissipation.
3.2 Introduction
Chapter 2 examined the convective stability of an initially conductive ice I shell
under the influence of two of the weakly non-Newtonian deformation mechanisms in ice,
namely grain boundary sliding (GBS) and basal slip (bs). That work characterized the
critical Rayleigh number in two regimes of behavior. For modest amplitude temperature
perturbations, the critical Rayleigh number was found to be a function of the amplitude
of initial temperature perturbation. In the limit of large amplitude perturbations (> 37
K), the critical Rayleigh number was found to approach a constant, asymptotic value. In
the power law regime, the critical Rayleigh number for convection in ice with a rheology
of only GBS or only basal slip was found to vary by an order of magnitude as the
amplitude of initial temperature perturbation varies from 0.7 K to 17 K. In Chapter 2, we
concluded that convection could occur in the outer ice I layers of Europa, Ganymede, and
Callisto provided stringent requirements on shell thickness, perturbation amplitude, and
grain size are met simultaneously. If deformation in ice was accommodated by the GBS
deformation mechanism alone, then convection in Europa, Ganymede, or Callisto could
only occur in an ice shell with a grain size of 1 mm or less, triggered by a temperature
perturbation of order 1-10 K in shell greater than 100 km thick.
However, GBS and basal slip accommodate deformation in ice I only for a small

80
range of temperatures, grain sizes, and stresses, and the roles of the Newtonian deforma-
tion mechanism of diffusional flow and the highly non-Newtonian mechanism dislocation
creep were left unaddressed in Chapter 2. Using similar numerical methods, we extend
the results of this previous work to determine the conditions required to trigger con-
vection in an ice I shell using a composite Newtonian and non-Newtonian rheology for
ice.
3.3 Methods
3.3.1 Numerical Implementation of Composite Rheology for Ice I
Laboratory experiments indicate that deformation in ice I is accommodated by
four creep mechanisms, resulting in a composite flow law (Goldsby and Kohlstedt , 2001):
εtotal = εdiff + εdisl +
(
1
εbs+
1
εGBS
)−1
. (3.1)
The composite flow law includes contributions from diffusional flow (diff ), dislocation
creep (disl), and grain-size-sensitive creep (GSS), where deformation occurs by both
basal slip (bs) and grain boundary sliding (GBS ) (Goldsby and Kohlstedt , 2001). Basal
slip and GBS are dependent mechanisms and both must operate simultaneously to
permit deformation. When responsible for flow, the total strain rate for GSS is controlled
by the slower of the two constituent mechanisms (Durham and Stern, 2001).
The vertical viscosity structure near the base of the ice shell controls the viscous
restoring forces that retard growth of initial convective plumes, so estimates of the grain
size near the melting point of ice are useful for evaluating the conditions required to
permit convection. The grain sizes of ice in the satellites are not well constrained, with
estimates spanning eight orders of magnitude, from microns (Nimmo and Manga, 2002)
to meters (Schmidt and Dahl-Jensen, 2004). Terrestrial ice sheets under similar stress
and temperature conditions as the base of Europa’s ice shell exhibit grain sizes of order 1
mm (De La Chapelle et al., 1998). Grain growth in Europa’s ice shell would be limited

81
by rapid tidal flexing of the ice shell and by the presence of non-water-ice materials
(McKinnon, 1999). The presence of non-water-ice materials in the shells of Ganymede
and Callisto might similarly limit grain growth in these satellites as well.
To account for the uncertainty in the grain size of ice within the icy Galilean
satellites, we use grain sizes ranging from 0.1 mm to 10 cm. We characterize the
conditions required for convection as a function of grain size. We assume that the
ice shells have a uniform grain size, which is implausible in a real ice shell.
The strain rate for each creep mechanism in the composite rheology (equation
3.1) is described by
ε = Aσn
dpexp
(−Q∗
RT
)
, (3.2)
where ε is the strain rate, A is the pre-exponential parameter, σ is stress, n is the stress
exponent, d is the ice grain size, p is the grain size exponent, Q∗ is the activation energy,
R is the gas constant, and T is temperature. Rheological parameters after Goldsby and
Kohlstedt (2001) are summarized in Table A.2.
Goldsby and Kohlstedt (2001) provide an alternate set of creep parameters for
GBS and dislocation creep for ice near its melting point. For T > 255 K, deformation
rates in ice due to GBS are increased by a factor of 1000, in response to melting at
grain boundaries and edges, resulting in very low viscosities near the melting point.
This behavior is consistent with observations of grain size, temperature, stress, and
strain rate for terrestrial ice cores (De La Chapelle et al., 1998). A similar effect occurs
for dislocation creep at T > 258 K. We have not included the high temperature creep
enhancement in our initial numerical models. Use of the creep enhancement for warm
ice alone will result in extremely low viscosities near the base of the ice shell, which
presents a difficulty for our numerical model.
The strain rate from diffusion creep is described by
ε =42Vmσ
RTmd2
(
Dv +πδ
dDb
)
(3.3)

82
where Vm is the molar volume, Tm is the melting temperature of ice, Dv is the rate of
volume diffusion, δ is the grain boundary width, and Db is the rate of grain boundary
diffusion (Goodman et al., 1981; Goldsby and Kohlstedt , 2001).
The grain sizes we consider are much larger than the grain boundary width
(9.04 × 10−10 m) (Goldsby and Kohlstedt , 2001), so volume diffusion dominates over
grain boundary diffusion, and we may ignore the contribution of grain boundary diffu-
sion to the strain rate. The strain rate for volume diffusion is:
εdiff =Adiff
d2Do,v exp
(−Q∗
v
RT
)
(3.4)
where Do,v is the volume diffusion rate coefficient and Qv is the activation energy. The
viscosity of ice deforming by volume diffusion is Newtonian, but it does depend on grain
size. The parameters for volume diffusion are listed in Table A.2, where we have grouped
the pre-exponential parameters to calculate an effective Adiff = (42VmDo,v/RTm).
The deformation mechanism that yields the highest strain rate for a given tem-
perature and differential stress is inferred to accommodate deformation in ice at that
temperature and stress level. The transition stress between any pair of flow laws, for
example, GBS and dislocation creep, is described by
σT =
[
AGBS
Adisl
dpdisl
dpGBSexp
((Q∗
disl − Q∗GBS)
RT
)]1
ndisl−nGBS
. (3.5)
The expressions for the transition stresses between the various deformation mechanisms
can be used to construct deformation maps showing the boundaries of regimes of domi-
nance for each constitutent creep mechanism. Deformation maps for ice with grain sizes
0.1 mm, 1.0 mm, 1.0 cm, and 10 cm are illustrated in Figure 3.1.
The strain from a growing convective plume will be accommodated by the de-
formation mechanism that is dominant near the melting temperature of ice and the
thermal stress exerted by the growing plume. The thermal stress due to a plume of
height λ, warmer than its surroundings by δT , is approximately σth ∼ ρgαδTλ. In an

83
-4
-2
0
2lo
g 10
σ (M
Pa)
120 150 180 210 240
-4
-2
0
2lo
g 10
σ (M
Pa)
120 150 180 210 240
-4
-2
0
2lo
g 10
σ (M
Pa)
120 150 180 210 240
-4
-2
0
2lo
g 10
σ (M
Pa)
120 150 180 210 240
Disl
GBS
d=10 cm
120 150 180 210 240
120 150 180 210 240
120 150 180 210 240
120 150 180 210 240
Disl
Diff
GBS
d=1.0 cm
-4
-2
0
2
log 1
0 σ
(M
Pa)
120 150 180 210 240T (K)
-4
-2
0
2
log 1
0 σ
(M
Pa)
120 150 180 210 240T (K)
-4
-2
0
2
log 1
0 σ
(M
Pa)
120 150 180 210 240T (K)
-4
-2
0
2
log 1
0 σ
(M
Pa)
120 150 180 210 240T (K)
Disl
GBS
BS Diff
d=1.0 mm
120 150 180 210 240T (K)
120 150 180 210 240T (K)
120 150 180 210 240T (K)
120 150 180 210 240T (K)
Disl
GBS
BS
Diff
d=0.1 mm
Figure 3.1: Deformation maps for ice I using the rheology of Goldsby and Kohlstedt(2001), for ice with grain sizes of 10 cm, 1.0 cm, 1.0 mm, and 0.1 mm. Lines on thedeformation maps represent the transition stress between mechanisms as a function oftemperature. A melting temperature of 260 K is assumed. For large grain sizes, dislo-cation creep (n=4) dominates the rheological behavior for thermal stresses associatedwith initial plume growth in the icy satellites (∼ 10−4 − 10−2 MPa). The weakly non-Newtonian deformation mechanisms play important roles for intermediate grain sizes(1.0 cm and 1.0 mm). Diffusional flow, which is a Newtonian deformation mechanism,becomes important at small stresses, small grain sizes, and temperatures close to themelting point.

84
ice shell 50 km thick on Europa, Ganymede, or Callisto, a plume with height λ ∼ D and
δT ∼ 5 K can generate a thermal stress of ∼0.03 MPa. In an ice shell 25 km thick, a
plume of height approximately 25 km can generate ∼0.15 MPa. For the range of grain
sizes considered, the thermal stresses associated with initial plume growth can activate
any of the four deformation mechanisms, with dislocation creep controlling initial plume
growth for grain sizes of 10 cm, and diffusional flow controlling plume growth in ice with
a grain size of 0.1 mm.
Each deformation mechanism in the composite rheology has a distinct stress ex-
ponent and activation energy, so inversion of equation (3.1) for an exact expression for
viscosity (η = σ/ε) is not possible. van den Berg et al. (1995) implement a compos-
ite rheology for mantle materials, including a term for Newtonian diffusional flow and
non-Newtonian dislocation creep. To derive an expression for the total viscosity due to
all four deformation mechanisms, we follow the procedure described by van den Berg
et al. (1995) by expressing the composite flow law (equation 3.1) in terms of viscosities
as η = σ/ε. This procedure yields an approximate solution for the effective viscosity
due to all four deformation mechanisms as
ηeff =
[
1
ηdiff+
1
ηdisl+
(
ηbs + ηGBS
)−1]−1
. (3.6)
This approximation provides a good estimate of the total viscosity for most values of
stress and temperature. This approximation underestimates the viscosity by a factor of
∼ 3 near the transition stresses between pairs of deformation mechanisms. Figure 3.2
illustrates a representative plot of viscosity as a function of stress for various grain sizes
at a temperature of 185 K.
3.3.2 Numerical Convection Model
An explicit stress-dependent rheology of form
η =dp
Aσ(1−n) exp
( Q∗
RT
)
(3.7)

85
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
Diff
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
GBS10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
Basal Slip
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2log10(σ (MPa))
Disl
d=10 cm
d=1 cm
d=1 mm
d=0.1 mm
Figure 3.2: Composite Newtonian/non-Newtonian viscosity for ice I as a function ofstress for grain sizes 10 cm, 1 cm, 1 mm, and 0.1 mm, and a constant temperatureof T = 185 K (black lines). The family of solid green lines indicates the viscosityfor diffusional flow, which is Newtonian and independent of stress, but dependent ongrain size. The family of dotted blue lines indicate the viscosity for GBS, which isweakly stress-dependent and grain size-dependent. Lines for dislocation creep (dot-dashed orange) and basal slip (dashed red) are shown as well. The composite viscosityis approximate near the transition stresses between flow laws, represented here whereany two viscosity curves cross.

86
is used for each term in equation (3.6). To phrase the rheology in non-dimensional
terms, we divide each term in the expression for total viscosity by the viscosity due to
diffusional flow at the melting temperature of ice,
ηo =RTmd2
42VmDo,vexp
( Q∗v
RTm
)
. (3.8)
We use a reference viscosity (ηo) defined by the viscosity due to volume diffusion at the
melting temperature of ice, which yields a reference Rayleigh number for the ice shell
given by
Rao =ρgα∆TD3
κηo, (3.9)
similar to the definitions used in Newtonian studies.
The definition of the reference Rayleigh number (Rao) is purely for algebraic con-
venience, so the values of the Rayleigh number used in simulations with large grain size
where the ice becomes strongly non-Newtonian may seem counterintuitive (for example,
Rao = 10−2). In a non-Newtonian fluid, as the fluid begins to flow and convection starts,
the viscosities in the fluid layer decrease, and the viscosity in the convecting sublayer
may be several orders of magnitude lower than ηo. A more physically intuitive definition
of Rayleigh number in the non-Newtonian case is the effective Rayleigh number:
Raeff =Raoηo
〈η〉, (3.10)
where the average viscosity in the convecting sublayer 〈η〉, which can be calculated after
the convection simulation is run to steady state. However, we do not run our simulations
to steady state, because we study the growth of initial convective plumes, so we cannot
calculate 〈η〉. Because we can not calculate Raeff , the viscosity near the warm base of
the ice shell can be used to provide some physical insight into the behavior of the ice
shell under the composite rheology. The viscosity at the melting point near the base of
the ice shell is 1013 Pa s when volume diffusion and dislocation creep are the dominant
rheologies. When GSS creep accommodates convective strain, the viscosity at the base
of the ice shell is 1015 to 1016 Pa s.

87
We represent the transition stresses between the various deformation mechanisms
in the expression for total viscosity (equation 3.6) by a series of relative weighting factors
between the four rheologies, which govern the relative importance of each deformation
mechanism as a function of temperature and grain size. The weighting factor for dislo-
cation creep, for example, is given by
βdisl =A
dpηn
o ε(n−1)o , (3.11)
where ηo is the reference viscosity, and εo is the reference strain rate. The weighting
factors for basal slip and GBS have a similar form. The viscosity due to diffusional
flow has a weighting factor of 1 at T = Tm, and for example, values of βdisl range
from 1020 for a grain size of 10 cm to 10−4 for a grain size of 0.1 mm. Values of β for
each viscosity function are summarized in Table B.7. Each viscosity function becomes
non-dimensionalized as:
η′ =1
βσ′(1−n) exp
( E
T ′ + T ′o
−Ev
1 + T ′o
)
(3.12)
where primed quantities are non-dimensionalized, σ′ = σ/(ηoεo) is non-dimensional
stress, E = (Q∗/nR∆T ) is the non-dimensional activation energy, Ev = Q∗v/nR∆T
is the non-dimensional activation energy for volume diffusion, and T ′o = Ts/∆T is the
reference temperature. In this formulation, the relative weights, transition stresses,
and reference viscosity depend strongly on the grain size of ice. Values of thermal and
physical parameters used in this study are summarized in Table A.1.
We have implemented the composite rheology for ice in the finite-element convec-
tion model Citcom (Moresi and Gurnis, 1996; Zhong et al., 1998, 2000), which solves
the governing equations of thermally driven convection in an incompressible fluid. Our
simulations are run in 2D Cartesian geometry. Free-slip boundary conditions are used
on the surface (z = 0), base (z = −D), and edges (x = 0, xmax) of the domain. All
simulations in this study were performed in a domain with 32 x 32 elements, chosen to

88
resolve the bottom thermal boundary layer while allowing sufficient coverage of our large
parameter space given limited computational resources. To ensure numerical stability,
an upper viscosity cutoff of 1010ηo was imposed.
The layer is purely basally heated, so internal heating by tidal dissipation is
not considered. However, tidal heating likely plays a role in triggering convection in
the icy satellites by generating finite-amplitude temperature perturbations to soften
the ice (see Chapter 2), and potentially by modifying the viscosity and grain size of
the ice shell (McKinnon, 1999), which we discuss in sections 3.5.3 and 3.5.4. The
surface of the convecting layer is held at a constant temperature of 110 K, approximately
average for the equatorial surfaces of the Jovian icy satellites. We also use a single
nominal value of melting temperature for ice, 260 K. In Chapter 2, variation of melting
temperature is shown to have a small effect on the values of critical Rayleigh number and
conditions for convection in the satellites. We have not taken into account the thermal
or rheological effects of contaminant non-water-ice materials such as hydrated sulfuric
acid, or hydrated sulfate salts, which have been suggested to exist on the surfaces of
the satellites based on near-infrared spectroscopy (McCord et al., 1999; Carlson et al.,
1999). We have also not included terms in the Goldsby and Kohlstedt (2001) rheology
for high temperature creep enhancement due to premelting in ice.
In the absence of benchmarking data with rheologies similar to those used here,
we perform two types of checks on the validity of our model. First, we compare the
results of simulations with a simple strain rate-dependent composite Newtonian and
non-Newtonian (n=3) rheology to the results of van den Berg et al. (1993). We find
good qualitative agreement between the published solutions and our results by matching
viscosity, velocity, and temperature fields, as well as time evolution of kinetic energy
and heat flux.

89
3.3.3 Initial Conditions
The approach we use to numerically determine the critical Rayleigh number is
similar to linear stability analysis (Turcotte and Schubert , 1982; Chandrasekhar , 1961).
The convection simulations are started from an initial condition of a conductive ice shell
plus a temperature perturbation expressed as a single Fourier mode:
T (x, z) = Ts −z∆T
D+ δT cos
(2πD
λx
)
sin
(−zπ
D
)
(3.13)
where δT and λ are the amplitude and wavelength of the temperature perturbation,
and z = −D at the warm base of the ice shell. Use of free-slip boundary conditions
requires that the width of the computational domain (xmax) be equal to one half the
wavelength of initial perturbation. The simulation is run for a short time to determine
whether the initial perturbation grows and convection begins, or decays with time due to
thermal diffusion and viscous relaxation, causing the ice layer to return to a conductive
equilibrium (Barr et al., 2004). For a given initial condition, we run a series of convection
simulations with decreasing values of Rao. The critical Rayleigh number is defined as
the minimum value of Rao where the system convects for a given initial condition, and
here is determined to three significant figures.
Based on results from Chapter 2, we expect the critical Rayleigh number to
depend on a power of the amplitude of the initial temperature perturbation for pertur-
bations smaller than the rheological temperature scale. We call this regime of behavior
the “power law regime”. For perturbations larger than the rheological temperature scale
(Solomatov and Moresi , 2000),
∆Trh =1.2(n + 1)RT 2
i
Q∗, (3.14)
we expect the critical Rayleigh number to reach a constant, asymptotic value. We call
this regime of behavior the “asymptotic regime.” For each of the constituent rheologies
used here, ∆Trh ranges from 23 K to 56 K. We perform simulations with amplitudes

90
up to 30 K in all cases except the simulations using a grain size of 10 cm, where the
numerical resolution is too low to permit solutions to be found. With the composite
rheology for ice, the asymptotic regime is not numerically accessible given the numerical
resolution used in this study. Therefore, we examine the behavior of the ice shell in
the power law regime only, and vary the amplitude of temperature perturbations (δT )
between 3 K and 30 K.
3.4 Results
The viscous restoring forces that counteract the buoyancy of a growing plume are
wavelength-dependent, so the critical Rayleigh number for convection will depend on
the wavelength of the temperature perturbation, regardless of the rheology of the fluid.
Following the procedure described in Chapter 2, we first determine the wavelength of
perturbation for which Racr is minimized, then we investigate how Racr varies with the
amplitude of temperature perturbation.
Over the range of grain size values in this study (d= 0.1 mm, 1 mm, 1 cm, 2
cm, 3 cm, and 10 cm) the critical wavelength is constant at λcr ∼ 1.75D. Because
the activation energies of each constitutent rheology are similar, we do not expect the
critical wavelength, which is largely controlled by the vertical viscosity structure and
temperature gradient, to change much as the grain size is increased. A constant per-
turbation amplitude of δT = 7.5 K is used to determine λcr. We do not expect the
critical wavelength to change appreciably until δT ∼ ∆Trh (see Chapter 2). Figure 3.5
illustrates two examples of the variation in critical Rayleigh number with wavelength
for the composite rheology for ice with a grain size of 0.1 and 1.0 mm.
We find that the critical Rayleigh number obeys a scaling relationship similar in
form to the relationship derived for a purely non-Newtonian fluid:
Racr = Racr,0
( δT
∆T
)−θ, (3.15)

91
10-1
100100
101
102
0.0 0.1 0.2 0.3Time (t/τdiff)
EEEEEE
Convection
No Convection
Figure 3.3: Initial growth or decay of dimensionless kinetic energy (E) with non-dimensional time (t’=t/τdiff ) for a series of simulations of convection in ice with agrain size of 3.0 cm. Each line represents the evolution of kinetic energy for a simu-lation with a different Rayleigh number ranging from Rao = 2.19 × 102 (top curve) toRao = 2.14 × 102 (bottom curve). After an initial phase of quasi-exponential growth,the kinetic energy either begins to grow super-exponentially, indicating convection, ordecrease super-exponentially, indicating that convection did not begin. Isotherms andviscosity fields for the simulation using Rao = 2.17 × 102 (bottom-most bold line) areshown in Figure 3.4.

92
-30
-20
-10
0
Dep
th (
km)
-30
-20
-10
0
Dep
th (
km)
a) t=0 b) t=0
-30
-20
-10
0
Dep
th (
km)
0 10 20
X (km)
120 140160 180200 220 240260
T (K)
0 20
c) t=7.2 Myr
0 10 20
X (km)0 10 20
X (km)
12 14 16 18 20 22 24 26 28
log 10 η (Pa s)
d) t=7.2 Myr
Figure 3.4: (a) Temperature field with superimposed velocity vectors, and (b) viscosityfield with superimposed contours of constant viscosity for a sample initial condition inour study. (c) Temperature field, and (d) viscosity field at an elapsed time of 7.2 Myr.Here, Ra = 2.17 × 102, a temperature perturbation of δT=15 K is used, and the grainsize of ice is 3.0 cm, corresponding to an ice shell ∼ 30 km thick on Europa, Ganymede,or Callisto. The time evolution of kinetic energy (E) for this simulation is shown in thebottom-most bold line of Figure 3.3.

93
where values of θ can be obtained by fitting a curve to the Racr data in log-log space.
We find a mean value of θ = 0.243. If the convecting ice had a completely Newtonian
rheology for small grain sizes, θ ∼ 0. However, we find no evidence of a systematic
variation in θ as a function of grain size. An example of the fitted Racr values for ice
with grain sizes of 0.1 and 1.0 mm is illustrated in Figure 3.6.
The relationship between Racr,0 and the grain size of ice must be determined
through a third order polynomial fit in log-log space, resulting in an empirical relation-
ship between the fitting coefficient and grain size. Figure 3.7 shows the variation in
Racr,0 as a function of grain size, fit with the polynomial
ln(Racr,0)(ln(d)) = −0.129(ln d)3 − 2.98(ln d)2 − 22.6(ln d) − 42.7. (3.16)
An expression for the critical Rayleigh number as a function of temperature perturbation
and grain size can be obtained by combining equations (3.15) and (3.16), giving
Racr(δT, d) = exp
[
−0.129(ln d)3−2.98(ln d)2−22.96(ln d)−42.7
]( δT
∆T
)−0.243. (3.17)
The behavior of the critical Rayleigh number, and thus the conditions required
for convection, undergo two dramatic transitions as a function of grain size. One such
transition occurs as the grain size increases from 0.1 mm to 1.0 cm. Figure 3.8 demon-
strates the activation of GSS and decreasing importance of volume diffusion for three
simulations with Ra = Racr as the grain size increases from 0.1 mm to 1.0 mm. As the
grain size is increased from 0.1 mm to 1 mm, GSS creep is activated, causing the ice
to stiffen, and leading to larger viscosities near the base of the ice shell. The increase
in viscosity near the base of the ice shell leads to an increase in the critical ice shell
thickness for convection.
A second transition in behavior occurs as the grain size increases from 1.0 cm
to 3.0 cm. Over this range of grain sizes, dislocation creep begins to dominate over
diffusional flow and GSS creep because the thermal stress associated with the growing

94
2.00
2.25
2.50R
a cr
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50R
a cr
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50R
a cr
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50R
a cr
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
x 106
d=0.1 mm
d=1.0 mm
Figure 3.5: Critical Rayleigh number as a function of wavelength for ice with grain sizes0.1 mm and 1.0 mm. A constant temperature perturbation of δT=7.5 K is used. Inboth cases, the critical Rayleigh number is weakly dependent upon the wavelength ofperturbation, varying by 5% as λ is changed from 1.2D to 2.4D. The minimum valueof Racr occurs at a wavelength of 1.75D for both grain sizes.
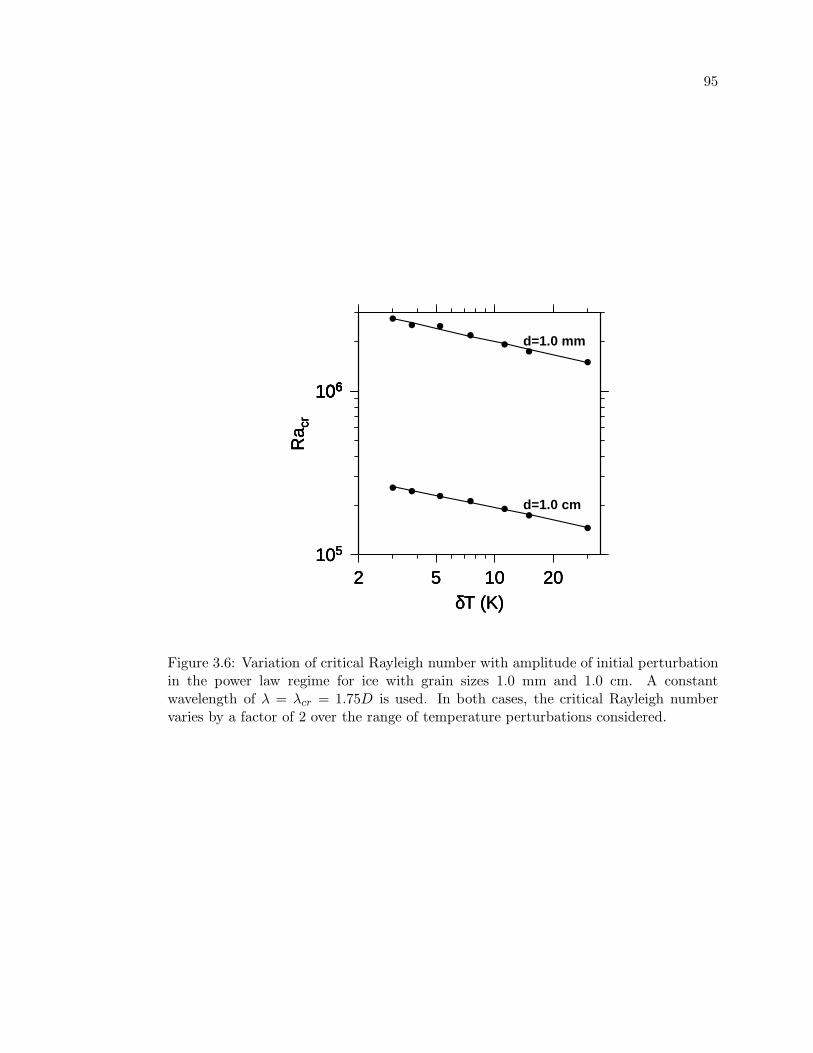
95
105
106106
Ra c
r
2 5 10 20δT (K)
105
106106
Ra c
r
2 5 10 20δT (K)
d=1.0 mm
105
106106
Ra c
r
2 5 10 20δT (K)
d=1.0 cm
Figure 3.6: Variation of critical Rayleigh number with amplitude of initial perturbationin the power law regime for ice with grain sizes 1.0 mm and 1.0 cm. A constantwavelength of λ = λcr = 1.75D is used. In both cases, the critical Rayleigh numbervaries by a factor of 2 over the range of temperature perturbations considered.

96
10-410-310-310-210-1100101102103104105106107
Ra c
r,0
10-5 10-410-4 10-3 10-2 10-1 100
Grain Size (m)
10-410-310-310-210-1100101102103104105106107
Ra c
r,0
10-5 10-410-4 10-3 10-2 10-1 100
Grain Size (m)
R2=0.9964
Figure 3.7: Fitting coefficient Racr,0 as a function of grain size. Dots indicate Racr,0
values obtained from fits to our numerical Racr data, and the line shows a third orderpolynomial fit to the data (equation 3.16) used to approximate the behavior of thefitting coefficient between data points. For grain sizes between 1.0 mm and 1.0 cm,the value of Racr,0 changes dramatically as the non-Newtonian deformation mechanismdislocation creep becomes activated, causing the viscosities in the ice shell to evolve tovalues much less than the reference viscosity.

97
d=0.1 mm
-0.8
-0.6
-0.4
-0.2
Dep
th
ηtotal
-0.8
-0.6
-0.4
-0.2D
epth
ηdiff
-0.8
-0.6
-0.4
-0.2
Dep
th
ηGSS
-0.8
-0.6
-0.4
-0.2
Dep
th
0.2 0.4 0.6 0.8X
ηdisl
d=1.0 mm
ηtotal
ηdiff
ηGSS
0.2 0.4 0.6 0.8X
ηdisl
d=1.0 cm
ηtotal
ηdiff
ηGSS
0.2 0.4 0.6 0.8X
ηdisl
13 14 15 16 17 18 19 20 21 22 23 24log 10 η (Pa s)
Figure 3.8: Maps of total viscosity in Pa s (top row), diffusional flow viscosity (secondrow), GSS viscosity (third row), and dislocation creep viscosity (bottom row) for threedifferent simulations with Rao = Racr, for increasing grain size from 0.1 mm (leftcolumn) to 1.0 cm (right column). A constant perturbation magnitude of 15 K wasused in each simulation, and the spatial coordinates are non-dimensionalized for ease ofcomparison. Under the composite flow law (equation 3.6), the deformation mechanismyielding the smallest viscosity (bluest) is dominant. As the grain size increases from0.1 mm (left panels) to 1.0 mm (center panels), the dominant deformation mechanismchanges from diffusional flow to GSS creep. As the grain size increases to 1.0 cm(right panels), dislocation creep becomes active and all three deformation mechanismscontribute to the total viscosity approximately equally. For grain sizes 0.1 mm and 1.0mm, the contribution to the total viscosity from dislocation creep is negligible becauseηdisl > 1024 Pa s, the maximum viscosity in the rigid ice near-surface ice.

98
plume is sufficient to activate dislocation creep. Figure 3.9 demonstrates the changing
role of dislocation creep for three simulations where Ra ∼ Racr as the grain size increases
from 1.0 cm to 3.0 cm. In this regime, convection can occur at much lower values of
Rao, but the value of effective Rayleigh number is still ∼ 106. As discussed in section
3.5, transitions in behavior with grain size are expected to have profound consequences
on the critical ice shell thickness for convection as grain size varies.
An expression for the critical ice shell thickness as a function of perturbation
amplitude and grain size in the power law regime can be obtained by combining the
scaling for critical Rayleigh number (3.17) and the definition of the Rayleigh number
(3.9) to obtain:
Dcr =
[
κηo
ρgα∆Texp
[
− 0.129(ln d)3 − 2.98(ln d)2 − 22.96(ln d) − 42.7]( δT
∆T
)−0.243]1/3
,
(3.18)
where the reference viscosity can be evaluated using equation (3.8).
In Chapter 2, we characterized the critical Rayleigh number for convection in ice
I with a GBS or basal slip rheology. The GBS deformation mechanism accommodates
deformation in ice I during the initial plume growth when the grain size of ice is approx-
imately 1 mm. Therefore, the results of our calculations here are consistent with the
results of Chapter 2 if the grain size of ice is assumed to be 1 mm. In this study, as in
our previous study, the conditions required to trigger convection in an ice I shell depend
strongly on the grain size of ice. In our previous work, when the GBS rheology was used,
changing the grain size of ice merely changed the value of the melting point viscosity.
Under the composite rheology, changing the grain size of ice changes the deformation
mechanism that accommodates convective strain.
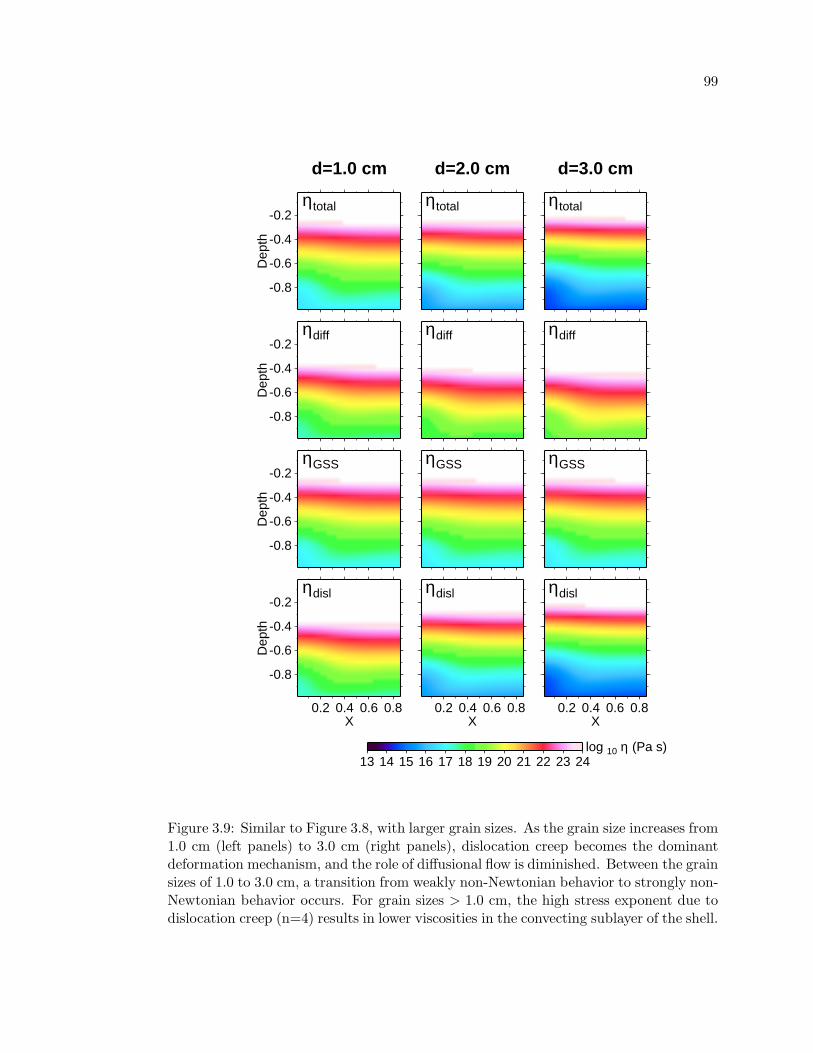
99
d=1.0 cm
-0.8
-0.6
-0.4
-0.2
Dep
th
ηtotal
-0.8
-0.6
-0.4
-0.2
Dep
th
ηdiff
-0.8
-0.6
-0.4
-0.2
Dep
th
ηGSS
-0.8
-0.6
-0.4
-0.2
Dep
th
0.2 0.4 0.6 0.8X
ηdisl
d=2.0 cm
ηtotal
ηdiff
ηGSS
0.2 0.4 0.6 0.8X
ηdisl
d=3.0 cm
ηtotal
ηdiff
ηGSS
0.2 0.4 0.6 0.8X
ηdisl
13 14 15 16 17 18 19 20 21 22 23 24log 10 η (Pa s)
Figure 3.9: Similar to Figure 3.8, with larger grain sizes. As the grain size increases from1.0 cm (left panels) to 3.0 cm (right panels), dislocation creep becomes the dominantdeformation mechanism, and the role of diffusional flow is diminished. Between the grainsizes of 1.0 to 3.0 cm, a transition from weakly non-Newtonian behavior to strongly non-Newtonian behavior occurs. For grain sizes > 1.0 cm, the high stress exponent due todislocation creep (n=4) results in lower viscosities in the convecting sublayer of the shell.
100
3.5 Implications for the Icy Galilean Satellites
Gravity and magnetic data from the Galileo mission suggest that Europa, Ganymede,
and Callisto have internal oceans, but the portion of their outer H2O layers that are
solid is loosely constrained. The maximum thickness of Europa’s ice-rich layer is approx-
imately 170 km (Anderson et al., 1998), but estimates based on geological observations
suggest that the solid ice shell is perhaps 20-25 km thick (Pappalardo et al., 1999; Nimmo
et al., 2003). For Ganymede and Callisto, the upper bound on ice I shell thickness is
obtained by estimating the depth to the minimum melting point of ice I in each satellite.
In Ganymede, assuming the shell is pure water ice with a density of 930 kg m−3, the
minimum melting point occurs at a depth of 160 km; in Callisto, 180 km.
The composite flow law used here is specific to water ice, so important caveats are
required before directly applying these results to the icy Galilean satellites. If impurities
such as hydrated sulfuric acids, hydrated magnesium salts, or ammonia are present in
the ice shells, the conditions for convection outlined here may not directly apply to the
Galilean satellites. Deviation in the rheological parameters due to the presence of these
or other materials could dramatically alter the rheology and the conditions required to
initiate convection. Additionally, we have assumed a constant grain size for the ice in
the shells, which is an oversimplification. Moreover, we have ignored internal heating
by tidal dissipation in favor of exploring the interesting changes in behavior with grain
size.
As discussed in section 3.3.1, we do not include the alternate set of rheological
parameters presented by Goldsby and Kohlstedt (2001) for enhanced creep rates due to
grain boundary sliding and dislocation creep caused by premelting at grain boundaries
and grain edges in ice near its melting point. If the high temperature creep enhancement
were included in the numerical model, the viscosities near the base of the ice shell
for grain sizes greater than 1.0 mm would be greatly reduced, potentially permitting

101
convection in thinner ice shells than determined in this study. As the initial convective
plumes if the convective temperature of the ice shell is within a few degrees of the
melting point, the entire sublayer of the ice shell would convect vigorously because of
its low viscosity. Additionally, if tidal dissipation warmed the sub-layer of an initially
conductive ice shell to a temperature close to the melting point, the sub-layer of the
shell could have a viscosity low enough to become convectively unstable. In this case, an
ice shell judged to be stable against convection in this study would convect if the high
temperature creep enhancement were included in the model. For this reason, it would
be valuable to include this high temperature creep enhancement in future modeling
efforts.
3.5.1 Conditions for Convection in Europa
Figure 3.10 illustrates the critical ice shell thickness for convection in Europa as a
function of grain size, employing equation (3.17) to interpolate between our Racr data
points. For all grain sizes, the critical shell thickness for convection is less than the
maximum permitted shell thickness. For a grain size of 0.1 mm, the thickness of ice
shell required to initiate convection is 14 km from an initial temperature perturbation
of 7.5 K spread over a characteristic distance roughly equal to the thickness of the
ice shell. The critical ice shell thickness maximizes at a value of 134 km for a 7.5 K
temperature perturbation at a grain size of 5 mm, where GSS creep is the dominant
deformation mechanism. For large grain sizes where the thermal stress of the plume
exceeds the transition stress from GBS to dislocation creep, the critical ice shell thickness
for convection is small. Under the composite rheology, an ice shell with the nominally
accepted thickness of 20-25 km (Pappalardo et al., 1999; Nimmo et al., 2003) can convect
given an initial perturbation of 15 K if the grain size is less than 0.3 mm or greater than
40 mm.

102
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
Dmax = 170 kmDmax = 170 km
Figure 3.10: Critical ice shell thickness for convection in Europa as a function of grainsize. The bold line represents a perturbation amplitude of 3 K, the thin line representsa perturbation amplitude of 30 K. The dotted horizontal line represents the maximumpermitted shell thickness on Europa of 170 km.

103
3.5.2 Conditions for Convection in Ganymede and Callisto
Figures 3.11 and 3.12 illustrate the critical shell thickness for convection in Ganymede
and Callisto as a function of grain size. Similar to the Europa data, the critical shell
thicknesses for convection are less than the maximum permitted shell thickness in both
Ganymede and Callisto for the range of grain sizes considered here. If the ice shells of
Ganymede and Callisto are in conductive equilibrium with present-day radiogenic heat-
ing (4.5 ×10−12 W kg−1) (Spohn and Schubert , 2003) in their interiors, the equilibrium
ice shell thicknesses are 128 km and 148 km. Convection can occur in the present day
shells if the grain size is less than 6 mm or greater than 50 mm, given an initial temper-
ature perturbation of 15 K. Approximately 1.5 billion years ago when the concentration
of 40K was higher, and therefore radiogenic heating rates were twice their present val-
ues, the equilibrium ice shell thicknesses of Ganymede and Callisto were 64 km and 74
km, respectively. Convection could be triggered by a 15 K temperature perturbation in
these ancient, thin shells if the ice had a grain size less than 1 mm or greater than 17
mm.
3.5.3 Role of Tidal Heating
Tidal dissipation may play a key role in generating the ∼1-10’s K temperature
perturbations used as initial conditions in this study. Once the temperature pertur-
bation due to tidal dissipation reaches the rheological temperature scale ∼ 22 − 56 K
(see section 3.3.3, the critical Rayleigh number approaches a constant asymptotic value.
Therefore, adding additional tidal heat will not trigger convection in the ice shell and
could instead result in melting of the base of the shell.
Estimates of the total amount of energy dissipated by tidal flexing of Europa and
Ganymede’s ice shells exist, but the spatial distribution of the dissipation in their ice
shells is unknown. If tidal dissipation is spatially localized within convective upwellings

104
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
Dmax = 170 kmDmax = 160 km
Figure 3.11: Same as Figure 3.10, but for Ganymede.

105
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
Grain size (m)
Dmax = 160 kmDmax = 180 km
Figure 3.12: Same as Figure 3.10, but for Callisto.

106
on length scales similar to the thickness of the ice shell in convective upwellings (Tobie
et al., 2003), or along zones of weakness in the ice shell (Nimmo and Gaidos, 2002;
Tobie et al., 2004), the critical Rayleigh number for tidally triggered convection would
be similar to the values calculated here. It is also possible that the spatial pattern of
tidal dissipation within an ice shell follows the spatial distribution of the tidal strain
rate (Ojakangas and Stevenson, 1989). In this case, the wavelength of tidal dissipation
is much greater than the thickness of the ice shell, and much larger than the critical
wavelength used in our calculation. For wavelengths larger or smaller than the criti-
cal wavelength, the value of critical Rayleigh number is higher, and the critical shell
thickness for convection would be larger. Therefore, triggering of convection by tidal
dissipation could require a thicker ice shell than calculations here imply.
3.5.4 Evolution of Grain Size and Orientation
We have assumed a uniform grain size for the ice shell, which is certainly an
oversimplification for the icy satellites. Tidal heating, rapid tidal flexing of the ice
shells, and large convective strains likely modify the size and orientation of ice grains
in the shell.
By analogy with terrestrial ice sheets, ice shelves, and the Earth’s mantle, a
complex suite of processes is likely to occur within the ice shells to cause grain sizes
to evolve as a function of temperature, strain rate, impurity concentration, and total
accumulated strain. For example, flow by dislocation creep is likely to lead to smaller
grain sizes, whereas flow by grain boundary sliding or diffusional flow is likely to lead
to grain growth (e.g. De Bresser, et al., 1998). If grain growth or destruction occurs
in ice, the change in grain size may cause the rate-limiting deformation mechanism to
change as a function of the accumulated convective strain. Conclusions regarding the
convective stability of the ice shells drawn from this study are strongly dependent on
the grain size of ice. Therefore, we advocate using a more realistic grain size model

107
in future work, by allowing grain size to dynamically evolve as a function of depth,
temperature, stress and accumulated convective strain.
Additionally, consideration of the non-Newtonian deformation mechanisms may
present new opportunities to measure the behavior of the ice I shells with ice penetrating
radar. In addition to the evolution of grain size, the evolution of grain orientations can
have an effect on the radar reflectance properties of ice. Flow by volume diffusion
does not lead to the development of crystal fabric, where the orientation of ice grains
is constant over large regions in the ice shell (Karato et al., 1995). If volume diffusion
accommodates convective strain in the ice shell, a random distribution of grain sizes and
orientations will form. Therefore, existing numerical models of convection in ice I do
not predict the development of crystal fabric in the ice shells of the Galilean satellites.
Preferred orientation of the c axis of ice grains (crystal fabric) can lead to radar
polarization anisotropy in ice sheets (Matsuoka et al., 2003). Therefore, if large con-
vective strains in the ice shells are accommodated by deformation mechanisms that
lead to the development of crystal fabric (i.e. dislocation creep), radar polarization
anisotropy of the ice shell could be used to determine whether the ice shell convected.
If anisotropy due to crystal fabric could be deconvolved from other causes of radar po-
larization anisotropy in ice, and the pockets of coherent deformation are similar in size
to the wavelength of ice penetrating radar, radar sounding could potentially be used to
infer the strain history of the ice shell.
3.6 Summary and Conclusions
Recent laboratory experiments suggest that ice I exhibits a complex rheologi-
cal behavior at the temperatures and pressures appropriate to the interiors of the icy
Galilean satellites. Deformation in ice occurs due to several different creep mecha-
nisms, each of which become activated at different stresses and temperatures. At low
stresses, ice with a small grain size (∼ 0.1 mm) behaves as a Newtonian fluid, and de-

108
formation is accommodated by volume diffusion. As stress increases and temperature
drops, the rheology of ice becomes stress-dependent as the grain-size-sensitive creep
and dislocation creep mechanisms become active. The stresses associated with initial
plume growth within an ice I shell of the Galilean satellites are similar to the transition
stresses between several of the Newtonian and non-Newtonian deformation mechanisms,
necessitating inclusion of all mechanisms in a numerical convection model.
Using a composite Newtonian/non-Newtonian temperature and stress-dependent
rheology for ice I, we find that the critical ice shell thickness for convection is a strong
function of the grain size of the ice shell. We find that similar to a purely non-Newtonian
fluid, the critical ice shell thickness for convection in a composite Newtonian/non-
Newtonian ice shell depends on the amplitude of initial temperature perturbation issued
to the ice shell. A finite-amplitude perturbation (δT ∼1-10’s K) is required to initiate
convection regardless of the grain size of ice or thickness of ice shell. Tidal dissipation
may be required to generate such temperature perturbations.
Under the composite rheology, convection is possible in ice shells less than 30
km thick in Europa, Ganymede, and Callisto provided the grain size of ice is < 1 mm,
which allows diffusional flow to control plume growth, or > 1 cm, which allows thermal
stresses to activate non-Newtonian dislocation creep. For intermediate grain sizes, GSS
creep controls plume growth, in which case the critical ice shell thickness for convection
is close to the maximum permitted on the icy Galilean satellites, consistent with results
shown in Chapter 2 using a grain boundary sliding rheology.
Tidal dissipation likely plays a key role in initiating convection in the satellites, by
providing a source of temperature perturbations. However, because the physics of tidal
heating are poorly understood, we cannot judge whether the heat would be concentrated
in the ice shell over a horizontal length scale similar to the ice shell thickness, necessary
for tidal forcing to generate temperature perturbations similar to those used in this
study. If tidal heating is distributed over longer distances, thicker ice shells might be

109
required to permit convection from an initial temperature perturbation spread over a
large area.
Consideration of the non-Newtonian rheology of ice I has highlighted two very
important effects in judging the convective stability of the icy satellites that were pre-
viously unaddressed. As a result of the complex Newtonian/non-Newtonian behavior
of ice I, the conditions required to trigger convection in an ice shell depend on the
initial conditions in the shell and the grain size of ice. Given the requirement of a
finite-amplitude temperature perturbation to start convection, we postulate that tidal
dissipation plays a key role in softening the ice to permit convection and plan to focus
future studies toward the goal of understanding tidal heating in ice shells.

Chapter 4
Implications for the Internal Structure of the Major Satellites of the
Outer Planets
4.1 Abstract
As governed by the Goldsby and Kohlstedt (2001) composite Newtonian/non-
Newtonian rheology, the efficiency of convective heat transport in the outer floating
ice I shell of a large icy satellite is strongly dependent on the ice grain size. Basally
heated shells 20 - 100 km thick with assumed uniform grain size of ≤ 0.3 mm convect
vigorously with heat fluxes between 30-40 mW m−2 because Newtonian volume diffusion
accommodates convective strain and results in low ice viscosities in the convecting sub-
layer. If the ice has a grain size ≥ 30 mm, dislocation creep accommodates strain,
convection is sluggish, and convective heat fluxes are 15 - 20 mW m−2. When convection
occurs in the absence of tidal dissipation, the heat flux across an ice shell can exceed
the radiogenic heat flux, casuing the ice shell to thicken by meters per year. If the
ice shell has a grain size of 3-10 mm, it cannot convect if < 100 km thick, permitting
internal oceans to be thermodynamically stable in a Ganymede/Callisto-like satellite in
the absence of tidal dissipation or non-water-ice materials, given chondritic heating rates
appropriate for 1.5 billion years ago. If the melting point of the ice shell is depressed
due to the presence of non-water-ice materials such as sulfuric acid hydrate or ammonia,
oceans may be stable beneath conductive ice shells. If tidal dissipation occurs in the
ice I shell, additional heat may be supplied to the interior of the ice shell to balance

111
efficient convective heat transport, and may permit oceans to be thermodynamically
stable. If tidal dissipation is capable of changing the mode of heat transport across the
ice I shell, or the amount of tidal dissipation depends on the thermal structure of the
ice shell, the tidal and convective/conductive heat fluxes are linked quantities. More
detailed modeling of tidal dissipation is necessary to clarify how tidal heat is spatially
localized in the ice shell, and to investigate whether a feedback between tidal heating
and convection occurs.
4.2 Introduction
The results of Chapters 2 and 3 indicate that the critical Rayleigh number for
convection in ice I with a composite Newtonian/non-Newtonian rheology depends on
the amplitude and wavelength of initial temperature perturbation issued to an initially
conductive ice layer, in addition to the thermal, rheological, and physical parameters of
the ice shell. Here, we illustrate how the heat flux across a convecting ice shell depends
on the ice grain size, which determines the deformation mechanisms that accommodate
convective strain. We numerically model convection in basally heated ice shells using
a composite Newtonian and non-Newtonian rheology for ice I with uniform grain size
in the icy Galilean satellites to judge the thermodynamic stability of their liquid water
oceans.
4.3 Methods
4.3.1 Numerical Implementation of Ice Rheology
The laboratory experiments of Goldsby and Kohlstedt (2001) indicate that defor-
mation in ice I is accommodated by volume diffusion, dislocation creep, and grain size
sensitive (GSS) creep, the last of these occurring by both grain boundary sliding (GBS)
and basal slip (bs). The strain rate for each creep mechanism in the composite rheology

112
is described by
ε = Aσn
dpexp
(−Q∗
RT
)
, (4.1)
where ε is the strain rate; A, n, p, and Q∗ are experimentally determined rheological
parameters; d is the ice grain size, R is the gas constant, and T is temperature (Table
A.2).
Goldsby and Kohlstedt (2001) provide an alternate set of creep parameters for
GBS and dislocation creep in ice near its melting point, but we do not include this
effect in our present models. If the viscosities due to GSS and dislocation creep in the
warm basal ice are much smaller than described here, convection might be possible in
ice shells thinner than described by our models.
To implement a viscosity due to all four deformation mechanisms simultaneously,
we rephrase the composite flow law of Goldsby and Kohlstedt (2001) in terms of vis-
cosities using η = σ/ε, which allows an approximate solution for the total viscosity (see
Chapter 3):
ηtot =
[
1
ηdiff+
1
ηdisl+
(
ηbs + ηGBS
)−1]−1
. (4.2)
An explicit stress-dependent rheology of form
η =dp
Aσ(1−n) exp
( Q∗
RT
)
(4.3)
is used for each term in equation (4.2). To non-dimensionalize the rheology, we divide
each term in equation (4.2) by the viscosity due to diffusional flow at the melting
temperature of ice,
ηo =d2
Aexp
( Q∗v
RTm
)
. (4.4)
The transition stresses between the deformation mechanisms are mathematically rep-
resented by a series of weighting factors (β) between the four component rheologies,
which govern the relative importance of each mechanism as a function of temperature
and grain size (see Chapter 3). Values of the weighting factors appropriate for the val-
ues of grain size used in this study are listed in Table B.7. Each viscosity function is

113
expressed in non-dimensional coordinates (primed quantities) as:
η′ =1
βσ′(1−n) exp
( E
T ′ + T ′o
−Ev
1 + T ′o
)
(4.5)
where σ′ = σ/(ηoεo) is non-dimensional stress, E = Q∗/nR∆T is the non-dimensional
activation energy, Ev = Q∗v/nR∆T , and T ′
o = Ts/∆T is the reference temperature.
Thermal and physical parameters used in this study are summarized in Table A.1.
We use a reference Rayleigh number defined by
Rao =ρgα∆TD3
κηo, (4.6)
where ρ = 930 kg m−3 is the density of ice, g is the acceleration of gravity, α = 10−4
K−1 is the coefficient of thermal expansion, ∆T is the temperature difference between
the surface and base of the shell, and κ = 10−6 m2 s−1 is the thermal diffusivity. In a
non-Newtonian fluid, viscosities in the layer may evolve to values larger or smaller than
ηo depending on the vigor of convection. The viscosity at the melting point near the
base of the ice shell is 1013 Pa s when volume diffusion and dislocation creep are the
dominant rheologies. When GSS creep accommodates convective strain, the viscosity
in the convecting interior of the ice shell is 1014 to 1015 Pa s.
4.3.2 Numerical Convection Model
We have implemented the composite rheology for ice in the finite-element convec-
tion model Citcom (Moresi and Gurnis, 1996; Zhong et al., 1998, 2000), which solves
the governing equations of thermally-driven convection in an incompressible fluid. Our
simulations are performed in 2D Cartesian geometry, and free-slip boundary conditions
are used on the surface (z = 0), base (z = −D), and side walls (x = 0, xmax) of the do-
main. All simulations in this chapter are performed in a domain with 64 x 64 elements,
chosen to resolve the thermal boundary layers while allowing sufficient coverage of our
parameter space given limited computational resources. All simulations are run until
the surface heat flux converges to within 0.01% per time step.

114
The layer is purely basally heated, so internal heating by tidal dissipation is not
considered in our numerical models, and is briefly discussed in section 4.4.5. The surface
of the convecting layer is held at a constant temperature of Ts = 110 K, appropriate for
the equatorial surfaces of an icy Galilean satellite, and the base of the ice shell is kept
at the melting point of water ice, assumed constant at Tm = 260 K.
4.3.3 Initial Conditions
Each simulation is started from a uniform initial condition of a conductive equi-
librium plus a temperature perturbation expressed as a Fourier mode:
T (x, z) = Ts −z∆T
D+ δT cos
(2πD
λx
)
sin
(−zπ
D
)
, (4.7)
where λ = D and δT = 7.5 K. If convection does not occur with δT =7.5 K, an
additional simulation is performed with δT=37.5 K. In most cases where convection
does not initiate from an initial temperature perturbation of 7.5 K, convection does not
initiate from the larger perturbation either. When D = 60 km and d = 1.0 mm, we find
that Rao ∼ Racr and convection is triggered in the shell with a perturbation of 37.5
K, but not from the smaller 7.5 K perturbation. In this case, convection is extremely
sluggish, confined to the bottom 40% of the shell.
4.4 Thermodynamic Stability of Oceans
If the heat flux across the ice shell due to conduction and convection exceeds the
radiogenic and potentially tidal heating, the liquid water layer in the satellite will freeze
and the ice shell will thicken. The heat flux due to convection is given by
Fc =k∆T
DNu, (4.8)
where k = 3.3 W m−1 s−1 is the thermal conductivity, and Nu is the Nusselt number
which expresses the relative efficiency of convection (Nu > 1) over conduction (Nu ≡ 1).

115
Under the composite rheology, the relationship between the Rayleigh number and the
Nusselt number (Nu = aRab) implicitly relates the thickness of the ice shell and grain
size to the convective heat flux. To properly determine the Nusselt number for the ice
shell, we must first determine whether convection occurs, then determine the steady
state heat flux across the ice shell for cases where convection does occur.
4.4.1 Critical Rayleigh Number
Our studies of the critical Rayleigh number for convection in ice I described in
Chapter 3 indicate that the critical ice shell thickness required for convection depends
on the grain size of ice, which controls the deformation mechanism that accommodates
strain during initial plume growth. For small grain sizes (0.1-1 mm), Newtonian volume
diffusion accommodates strain, and convection can occur in relatively thin ice shells
D < 35 km. For large grain sizes (d > 10 mm), dislocation creep accommodates strain,
and the large stress exponent permits the ice in the warm convecting sublayer of the ice
shell to have a relatively low viscosity once convection begins. For intermediate grain
sizes (3 mm < d < 10 mm), the critical ice shell thickness for convection is greater than
100 km.
4.4.2 Efficiency of Convection
To characterize the Nusselt number for convecting ice shells, we perform numerical
simulations of convection to determine Nu for a range of values of ice grain size from 0.1
to 30 mm, and ice shell thickness from 20 to 100 km. Rayleigh numbers for the ice shells
are calculated using an acceleration of gravity g = 1.3 m s−2. This value is appropriate
for Europa, and mid-way between values for Ganymede and Callisto. Figure 4.1 shows
the parameter space explored, and which parameter sets resulted in convection. The
scaling between critical ice shell thickness and grain size from Chapter 3 using λ = 1.75D
is shown on Figure 4.1 as well. The relationship between Dcr and d derived in Chapter

116
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
Figure 4.1: Parameter space of grain size (d) and ice shell thickness (D) explored inthis study. Crosses indicate that convection did occur in the ice shell, triggered from aninitial temperature perturbation of 7.5 K. Filled squares indicate that convection did notoccur, even when the temperature perturbation was 37.5 K. The solid line represents thescaling between critical shell thickness and grain size for a temperature perturbation of7.5 K (from Chapter 3) which is approximately correct for the wavelength and numericalresolution used here. For the open square with cross, D=60 km and d=1 mm, Ra ∼Racr, and convection was initiated from a temperature perturbation of 37.5 K, but notfrom the smaller 7.5 K perturbation.

117
3 is only approximately correct for λ = 2.0D, because the numerical resolution of the
critical Rayleigh number calculations in Chapter 3 was 32x32 elements, whereas here we
use a higher resolution of 64x64 elements. Doubling the numerical resolution affects the
value of critical Rayleigh number at the 10% level. Additionally, the critical Rayleigh
number is a weak function of λ under the composite rheology of ice, so the stability
curve for λ = 1.75D is slightly different (at the 5% level) than the stability curve for
λ = 2.0D.
Table 4.1 summarizes the values of Nusselt number and convective heat flux
obtained from our simulations where convection occurred. The grain size of ice controls
the value of Nu by controlling which rheologies are active in the ice shell after the
initial plumes grow into a well-developed convection pattern. The convective heat flux
is only weakly dependent on the thickness of the ice shell, consistent with the behavior
of stagnant lid convection. For a grain size of 0.1 mm, volume diffusion accommodates
deformation and viscosities in the shell are generally low. This leads to efficient heat
transport by convection and large heat fluxes of order 30 - 40 mW m−2 (2 < Nu < 6).
As the grain size increases to 0.3 mm, the viscosity of ice increases by a factor of 10, as
GSS creep becomes activated. Resultant convective heat fluxes are halved, with values
ranging from 15 - 20 mW m−2 (2 < Nu < 1).
To compare our results to recent calculations by Spohn and Schubert (2003) that
employ parameterized convection models using Newtonian rheologies to address the
thermodynamic stability of oceans, we fit our Ra − Nu data to an equation of form:
Nu = aRabo. We find that a ranges from 0.01 to 0.05 and values of b range from 0.26 to
0.3 for 0.1 mm < d < 1 mm. Our values of b are consistent with the values of b used by
Spohn and Schubert (2003) (0.2 < b < 0.3). However, our vales of a are substantially
smaller, which is likely due to the difference in our definition of Rayleigh number, which
is evaluated at the melting temperature of ice, rather than the interior temperature of
the ice shell (Spohn and Schubert , 2003).

118
Table 4.1: Convective Heat Flux and Nu for 20 km < D < 100 km
D (km) d (m) Rao Nu Fconv (mW m−2)
20 10−4 5.9 × 106 1.67 4120 10−3 3.1 × 106 1.57 39
35 10−4 3.2 × 107 2.15 3035 3 × 10−4 3.5 × 106 1.60 2335 3 × 10−2 3.5 × 102 1.53 22
50 10−4 9.2 × 107 3.51 3550 3 × 10−4 1.0 × 107 1.85 1850 3 × 10−2 1.0 × 103 1.79 18
60 10−4 1.6 × 108 4.07 3460 3 × 10−4 1.8 × 107 2.05 1760 10−3 1.6 × 106 1.16 9.560 3 × 10−2 1.8 × 103 1.98 16
75 10−4 3.1 × 108 5.36 3575 3 × 10−4 3.5 × 107 2.45 1675 3 × 10−2 3.5 × 103 2.11 14
85 3 × 10−2 5.0 × 103 2.69 1685 3 × 10−4 5.0 × 107 2.69 16
100 3 × 10−4 8.2 × 107 3.37 17100 10−3 7.4 × 106 1.76 8.7

119
4.4.3 Ocean Stability Without Tidal Heating
To judge the thermodynamic stability of the oceans, we use the conductive and
convective heat flux (Fc) data described above to calculate an instantaneous rate of
change of the thickness of the ice shell from the net heat flux across the shell. In the
absence of tidal dissipation, Fnet=Fc−Fr, where Fr is the radiogenic heat flux. The rate
of change of the thickness of the ice shell is evaluated by equating the heat required to
freeze a layer δD thick at the bottom of an ice shell to the net amount of heat removed
from the ice shell by convection and conduction in a time δt:
4π(Rs − D)2δDρHf = (Fc − Fr)4πR2sδt, (4.9)
where Rs is the radius of the satellite, Hf = 3.3 × 105 J kg−1 is the heat of fusion of
ice, and δD/δt is approximated by assuming D/Rs ≪ 1,
δD
δt∼
Fc − Fr
ρHf. (4.10)
Positive values of δD/δt indicate that the ice shell is thickening; negative values indicate
that the ice shell is melting.
In this formulation, the excess heat flux from the ice shell by efficient convec-
tive heat transfer is assumed to be removed from the ocean, thereby causing freezing.
Therefore, this analysis of the heat balance between radiogenic heating and the con-
vective/conductive heat flux is only appropriate to non-tidally-heated satellites such
as Ganymede at present, and Callisto. It is not directly applicable to Europa, where
tidal dissipation exceeds the radiogenic heat flux and dominates the heat budget of the
satellite.
We calculate growth rates for a Ganymede- or Callisto-like satellite using a present
chondritic heat flux midway between values for Ganymede and Callisto as estimated by
Spohn and Schubert (2003). The chondritic heat flux appropriate for 1.5 billion years
in the past is approximately twice the present value due to the increased concentration

120
of 40K. We use Fr=3.6 mW m−2 for the present chondritic heat flux and Fr=7.2 mW
m−2 for 1.5 billion years ago.
Figure 4.2 shows the heat flux across the ice shell as a function of grain size and
shell thickness, and rates of change of shell thickness in a Ganymede/Callisto-like body
1.5 billion years ago and at present. Growth or thinning rates of the ice shells are of
order meters per year, and an ocean could persist without thinning (i.e. δD/δt=0) in
a Ganymede/Callisto-like satellite 1.5 billion years ago if the ice shell is 68 km thick.
At present, pure water-ice oceans in the satellites will be slowly freezing regardless of
whether the ice shell convects or not. When the ice shells are thick enough to convect,
at present, oceans in the Ganymede/Callisto-like body are freezing at a rate of 0.2 m
yr−1 to 3 m yr−1, depending on shell thickness and grain size.
As the thickness of the ice shell increases to a value where convection is per-
mitted, convection may occur if the ice shell is issued a finite-amplitude temperature
perturbation with λ ∼ λcr, so that Ra ∼ Racr. If convection begins, the rate of freezing
will increase because of the relative efficiency of convection over conduction, resulting
in freezing of the ocean unless additional heat by tidal dissipation or non-water-ice
materials dissolved in the ice shell depress its freezing point.
4.4.4 Presence of Non-Water-Ice Materials
Non-water ice materials such as ammonia and sulfuric acid in the shell can modify
the melting point of the shell and potentially permit stable oceans in the absence of tidal
dissipation in non-tidally heated satellites like Callisto. The melting point of the ice
shell could be depressed due to the presence of several non-water-ice materials. The
presence of ammonia in the ice shell can depress the freezing point of an ammonia-
water ocean to 176 K (Spohn and Schubert , 2003). The presence of H2SO4·nH2O, can
depress the freezing point of water to 211 K (Kargel et al., 2000). When the ocean is
stable, Fc = Fr, and we can solve for the melting point of the ice shell that would permit

121
0
15
30
45
Hea
t Flu
x (m
W m
-2)
20 40 60 80 100D (km)
0
15
30
45
Hea
t Flu
x (m
W m
-2)
20 40 60 80 100D (km)
0
15
30
45
Hea
t Flu
x (m
W m
-2)
20 40 60 80 100D (km)
0
15
30
45
Hea
t Flu
x (m
W m
-2)
20 40 60 80 100D (km)
0
15
30
45
Hea
t Flu
x (m
W m
-2)
20 40 60 80 100D (km)
0
1
2
3
0.1 mm
0.3 mm
30 mm
1.0 mm
3.0 mm - 10 mm 0
1
2
3
4
δD/δ
t (m
yr-1
)
Present1.5 Gya
Figure 4.2: Convective heat flux as a function of ice shell thickness, with superimposedrates of shell thickening (δD/δt > 0) or thinning (δD/δt < 0) for various grain sizes aslabeled from 0.1 - 30 mm. Growth rates for the ice shell range from -0.75 to 3.9 m yr−1
1.5 billion years ago and -0.37 to 4.25 m yr−1 at present (far right axis).

122
a stable ocean:
Tm = Ts +FrD
kNu. (4.11)
We are not able to evaluate this expression for convective ice shells because the rheology
of ice, values of Rayleigh number, and therefore, the relationship between the Nusselt
number and convective heat flux are calculated assuming Tm = 260 K and pure water
ice. However, if the ice shell does not convect and Nu = 1, Tm = 176 K (the ammonia-
water eutectic temperature) would permit an ocean to be stable beneath an ice shell
60.5 km thick in a Callisto-like satellite at present, and Tm = 220 K would permit a
stable ocean beneath a 100 km thick shell. One and a half billion years in the past,
Tm = 176 K would permit a stable ocean beneath a 30 km thick shell, and Tm = 220 K
would permit a stable ocean beneath a 50 km thick ice shell.
4.4.5 Tidal Dissipation
If tidal dissipation is occurring in the ice shell of the satellite, additional heat will
be supplied to the interior of the satellite which may decrease the rate of ocean freezing,
or prevent it from freezing, even if convection is occurring. With tidal dissipation
included, the net heat flux across the ice shell is:
Fnet = Fc − Fr − Ftidal. (4.12)
The rate of energy dissipation within a satellite in eccentric orbit around its parent body
is given by (Peale and Cassen, 1978):
E =21
2
k
Q
R5sGM2
Jne2
a6, (4.13)
where k is the Love number describing the response of satellite’s gravitational potential
to the applied tidal potential, Rs is the radius of the satellite, G is the gravitational
constant, MJ is the mass of the parent planet, n is the satellite’s mean motion, e is the
orbital eccentricity, Q is the tidal quality factor describing the fractional orbital energy

123
dissipated per cycle, and a is the semi-major axis of the satellite’s orbit about the parent
body.
The Love number k describes the response of the satellite to the tidal deformation,
and can only be approximated, because the value will depend on the distribution of mass
within the satellite, the rigidity of the ice shell, and the viscosity of the ice. If Europa
has a thin floating ice shell, k 0.25 (Moore and Schubert , 2000). If the satellite does not
have an internal ocean, and the ice I layer is rigidly coupled to the rock or ice layers
within the satellite, k becomes very small. Because the tidal dissipation is proportional
to k, and k ∼ 0 for a satellite without an internal water ocean, it is likely that tidal
dissipation in an icy satellite can only help to maintain an ocean, not create an ocean.
Values of the tidal quality factor are not well-constrained, but Q ∼ 100 is com-
monly assumed for the icy satellites (Murray and Dermott, 1999 and references therein.)
The actual value of Q for the satellite will depend on the amount of non-recoverable
viscous deformation that occurs within the satellite over one orbital cycle. For a vis-
coelastic satellite, the Love number k is complex, and the amount of energy lost per
cycle is proportional to the imaginary part of k (Segatz et al., 1988):
E =21
2Im(k)
(nRs)5
Ge2. (4.14)
In Europa and Ganymede, tidal dissipation may serve as an important heat source
in the outer ice I shells because the viscosity of ice near its melting point is potentially
small enough to permit a significant amount of non-recoverable viscous deformation in
the ice shell over each orbital cycle of the satellite. The value of Im(k) will depend
critically on the temperature-dependent rheology of the ice shell. Therefore, the overall
temperature structure of the ice shell could affect the value of Im(k). As a result, a
thick convecting ice shell with a sub-layer warmed to near its melting point could be a
more dissipative state than a cold conductive shell. In a convective shell, the sub-layer of
the shell could undergo appreciable viscous deformation due to tidal flexing of the shell

124
over a single orbital cycle, causing the total amount of tidal dissipation could increase.
In this way, the heat flux across the ice shell (Fc), which depends on whether convection
occurs or not, and the tidal heat flux (Ftidal) in equation (4.12) are linked quantities.
It is uncertain whether an equilibrium between dissipation in the ice shell and
the convective heat flux exists. If the tidal heat flux is greater than the maximum
convective heat flux, which is controlled by the rheology of the ice, the ice shell will
thin and convection will cease. If the tidal heat flux is less than the convective heat
flux, the ice shell will thicken, convection will become more vigorous, and the ocean
will freeze quickly. If the ice shell is thick, but initially conductive, tidal heating can
potentially trigger convection in the ice shell, and the evolution of the ice shell and
ocean will depend on the existence of an equilibrium between the heat flux due to tidal
dissipation and the convective heat flux.
Simple estimates of the rate of energy dissipation given assumed values of k and
Q can shed some light on the role that tidal dissipation might play in maintaining an
ocean beneath a floating ice shell in Ganymede and Europa. The energy dissipation
rate for Ganymede with its present semi-major axis is approximately (cf. Showman and
Malhotra, 1997):
Ftidal =E
4πR2s
= 2 × 107 mW m−2
(
e2k
Q
)
. (4.15)
Descriptive parameters of Ganymede’s orbit used to evaluate equation (4.13) to obtain
equation (4.15) are summarized in Table 4.2. Using k ∼ 0.25 and Q ∼ 100, the energy
dissipation rate at present in Ganymede given its present eccentricity of 0.0015 (Murray
and Dermott , 1999) is approximately 0.1 mW m−2, a factor of 20 less than the present
radiogenic heat flux, and a factor of 50 less than the radiogenic heat flux 1.5 billion
years ago. Ganymede may have experienced a period of increased orbital eccentricity
during passage through resonances with Europa and Io. During resonance passage,
the eccentricity of Ganymede’s orbit may have increased to ∼ 0.01, assuming a Q for

125
Table 4.2: Descriptive Parameters of the Orbits of Europa and Ganymede, from Murrayand Dermott (1999). †Values from Showman and Malhotra (1997).
Description Symbol Europa GanymedePresent Resonance†
Love Number k 0.25 0.25 0.25Tidal Quality Factor Q 100 100 100Radius of Satellite (km) Rs 1561 2634 2634Mass of Jupiter (kg) MJ 1.898 ×1027 1.898 ×1027 1.898 ×1027
Mean Motion (s−1) n 2 × 10−5 10−5 10−5
Eccentricity e 0.01 0.0015 0.01Semi-major Axis (km) a 6.71 × 105 1.07 ×106 1.07 ×106
Jupiter of 3 × 105 (Showman and Malhotra, 1997). During this time, the surface heat
flux due to tidal dissipation would have been 6 mW m−2, approximately equal to the
chondritic heat flux appropriate for 1.5 billion years ago. The enhanced heating during a
resonance passage would permit stable oceans beneath ice shells with heat fluxes below
Fr + Ftidal = 13.2 mW m−2. During Ganymede’s passage through an orbital resonance,
an ocean could be thermodynamically stable beneath a conductive ice shell 36 km thick.
The surface heat flux due to tidal dissipation at present in Europa is approxi-
mately:
Ftidal = 2 × 108 mW m−2
(
e2k
Q
)
. (4.16)
Using values of k = 0.25, Q = 100, and e = 0.01 (see Table 4.2), the surface heat flux is
approximately 50 mW m−2, which is a factor of 5 larger than the estimated chondritic
heat flux of 11 mW m−2 for Europa 1.5 billion years ago, and a factor of 10 larger than
the present chondritic heat flux of ∼ 5 mW m−2 (Spohn and Schubert , 2003). This
large heat flow also exceeds the maximum value of convective heat flux appropriate
for a basally heated ice shell obtained for D = 20 km in our study, indicating that
if the tidal dissipation were concentrated at the base of Europa’s ice shell, a 20 km
thick shell would not be thermodynamically stable, even if convection provided efficient
heat transfer. The majority of Europa’s tidal dissipation likely occurs in the ice shell,

126
because the viscosity of Europa’s ice shell is low enough to permit appreciable non-
recoverable viscous deformation over one Europan orbital cycle. Given the overwhelming
contribution of tidal dissipation to Europa’s total heating budget, detailed modeling of
tidal dissipation in Europa’s ice shell is required to quantify how tidal heat helps to
maintain Europa’s ocean.
4.5 Summary
Basally heated shells between 20 - 100 km thick with uniform grain size convect
vigorously when the grain size of ice is small, 0.3 mm or less, and Newtonian volume dif-
fusion accommodates convective strain. The composite Newtonian and non-Newtonian
behavior of the ice shell predicts sluggish convection or no convection in ice with grain
sizes 3-10 mm, due to large viscosities of ice when deformation is accommodated by
GSS creep. If the ice has a grain size ≥ 30 mm, dislocation creep accommodates strain,
convection is vigorous in ice shells thicker than 30 km.
Basally heated shells between 20 - 100 km thick with uniform grain size convect
vigorously with heat fluxes between 30-40 mW m−2 when the grain size is less than 0.3
mm. If the ice has a grain size ≥ 30 mm convective heat fluxes are between 15-20 mW
m−2. When convection occurs, the heat flux across the shell exceeds the radiogenic heat
flux, and the ice shells thicken by meters per year. If the ice shell does not convect,
liquid water oceans can be thermodynamically stable in the absence of tidal heating
or non-water-ice materials in a Ganymede- and Callisto-like body 1.5 billion years ago
when radiogenic heating was increased. If the melting point of the ice shell is modified
by the presence of non-water-ice materials such as ammonia and sulfuric acid hydrate,
oceans could be stable beneath thinner, non-convecting ice shells. Evaluation of the
stability of oceans beneath convecting ice shells with non-water-ice materials included
requires modification of the rheology of the ice shell to account for the difference in
melting temperature (Tm 6= 260 K) and potential modification of the grain size of ice

127
and rheology of ice.
Given the overwhelming contribution of tidal dissipation to Europa’s total heat
budget, it is likely that tidal heating helps to maintain a thermodynamically stable ocean
beneath Europa’s floating ice shell. If the heat flux due to tidal dissipation exceeds the
maximum permitted convective heat flux (which is a function of the ice rheology), tidal
dissipation may cause the ice shell to thin. A potential feedback between the thermal
and rheological structure of Europa’s ice shell precludes making conclusions about the
stability of Europa’s ocean or the thickness of its ice shell using our numerical results. If
Ganymede experienced widespread internal melting during passage through an orbital
resonance in the past, tidal dissipation in the ice shell may have caused the ocean to
grow. However, at present, tidal dissipation in Ganymede is a small contribution to
its total heat budget, indicating that non-water-ice materials may prevent freezing of
its ocean. Because Callisto has not experienced any tidal dissipation, our calculations
indicate that its ocean must be maintained due to the presence of non-water-ice materials
that depress the freezing point of its ice shell.
The heat balance arguments presented here are broadly consistent with the results
of Spohn and Schubert (2003). However, the key departure between our models and
existing studies lies in the behavior of the ice I shell during the onset of convection,
wherein convection must be triggered by a finite-amplitude temperature perturbation
to the ice shell. If tidal dissipation can be concentrated on horizontal spatial scales
similar to the thickness of the ice shell (i.e. λtidal ∼ λcr), convection may be triggered
by tidal heating. However, the detailed physics of how tidal dissipation occurs in the ice
shells is not well understood. Therefore, the potential for tidal dissipation to change the
mode of heat transport by triggering convection or thinning the ice shells is unknown,
and depends on the rheology of the ice. For this reason, the modeling described here is
a necessary first step toward building more realistic models of tidal dissipation in the
icy satellites.

Chapter 5
Implications for Astrobiology
5.1 Abstract
Solid state convection and endogenic resurfacing in the outer ice I shells of the
icy Galilean satellites may contribute to the habitability of their internal oceans and to
the detectability of biospheres by spacecraft. If convection occurs in an ice I layer, fluid
motions are confined beneath a thick stagnant lid of cold, immobile ice that is too stiff
to participate in convection. The thickness of the stagnant lid varies from 30 to 50% of
the total thickness of the ice shell, depending on the grain size of ice. Upward convective
motions deliver 109 to 1013 kg yr−1 of ice to the base of the stagnant lid where resurfacing
events driven by compositional or tidal effects such as the formation of domes or ridges
on Europa may deliver materials from the stagnant lid onto the surface. Conversely,
downward convective motions deliver 109 to 1013 kg yr−1 of ice from the base of the
stagnant lid to the bottom of Europa’s ice shell. Materials from the surface of Europa
may be delivered to the ocean by downward convective motions if material from the
surface can reach the base of the stagnant lid during resurfacing events. Triggering
convection in an initially conductive ice I shell requires modest amplitude (a few to 10’s
K) temperature anomalies to soften the ice to permit convection, which may require
tidal dissipation. Therefore, tidal dissipation, compositional buoyancy, and solid-state
convection may be required to permit mass transport between the surfaces and oceans
of the satellites.

129
5.2 Introduction
The outer ice I shells of icy satellites serve as a physical barrier between remote
sensing instruments and their internal liquid water oceans. The ice I shell is also barrier
between chemical nutrients generated on the surfaces of the satellites and the internal
oceans. Therefore, the understanding the geophysical processes that transport possible
life, nutrients, and the chemical traces of life between their ice-covered oceans and
surfaces is relevant to determining whether a biosphere can be sustained within and
detected on the icy Galilean satellites.
Solid state convection is potentially an important process in contributing to mass
transport across the ice I shell. When convection occurs in an ice I layer, convective
motions are confined beneath a stagnant lid of cold ice which limits the efficiency of
convective heat transfer and seemingly prevents convective motions from reaching the
surface of the ice shell (Barr and Pappalardo, 2003). The extent to which convection
and resurfacing permit mass exchange between the surface and ocean is addressed by
three geophysical questions:
• Under what conditions can convection occur in the outer ice I shells of the icy
Galilean satellites?
• If convection occurs in the ice I shells, what is the efficiency of mass transport
beneath the stagnant lid?
• How might the stagnant lid be breached?
Here, we summarize the astrobiological setting of the Galilean satellites, and ad-
dress the above questions using results obtained from previous chapters. The conditions
required to trigger convection in an ice I shell are determined in Chapter 3, with key
results summarized here. The numerical results used to determine the efficiency of con-
vective heat transfer described in Chapter 4 are used to characterize the mass flux of

130
ice recycled by convection beneath the stagnant lid. Finally, we discuss the formation
of ridges and domes on Europa as possible methods of breaching the stagnant lid.
5.3 Astrobiological Setting
The top panel of Figure 5.1 summarizes the geophysical processes that may en-
hance the habitability of Europa’s ocean. Because Europa’s ocean is cut off from sunlight
by kilometers of ice, any life in the ocean must be dependent upon delivery of nutrients
from the ice shell or from volcanic eruptions on Europa’s rocky mantle. Although it
is possible that microbial communities could be sustained through chemical reactions
which do not rely on the circulation of the ice shell (i.e. at deep hydrothermal vents)
(Jakosky and Shock , 1998; McCollom, 1999; Zolotov and Shock , 2004), the chemical en-
ergy available to organisms using these reactions may be small compared to the amount
of energy available in a radiation-driven ecosystem.
Based on predictions of impactor flux and the observed number of craters larger
than 10 km, the nominal age of Europa’s surface is ∼ 50 Myr, with an uncertainty of a
factor of 5 (Zahnle et al., 1998; Pappalardo et al., 1999; Zahnle, 2001). If the material
within Europa’s ice shell is mixed into the ocean on time scales similar to the surface
age, radiation-based nutrient sources could be made available to potential organisms in
the ocean.
Radioactive decay of 40K within the ice shell could generate up to ∼ 108 mol yr−1
of O2 and H2, which could chemically equilibrate in the ocean and sustain ∼ 106 cell
cm−3 of biomass over a 107 year timescale (Chyba and Hand , 2001). Formaldehyde,
hydrogen peroxide, and other materials are produced on the surface of Europa when
particles entrained in Jupiter’s magnetic field interact with H2O and CO2 ices (Carlson
et al., 1999). These materials have been spectroscopically detected on Europa’s surface
(Carlson et al., 1999). Products of radiation chemistry near the surface are expected to
be well mixed to a depth of 1.3 meters (Cooper et al., 2001). The steady-state biomass

131
that could be sustained by the equilibration of formaldehyde and hydrogen peroxide is
estimated to be ∼ 1023 cells (Chyba and Phillips, 2002), or 0.1 to 1 cell cm−3, assuming
the top 1.3 meters of ice is transported to the ocean every 107 years.
The basic elemental building blocks of life and additional nutrients for life may
be delivered to Europa through cometary impacts. Although a large percentage of
the ejecta from a large impact exceeds Europa’s escape velocity, at least 1012 to 1013
kg of carbon, and 1011 to 1012 kg of nitrogen, sulfur, and phosphorous may have been
delivered to Europa’s surface by giant impacts over the age of the solar system (Pierazzo
and Chyba, 2002). Endogenic resurfacing events coupled with downward motion of ice
in a convecting ice shell would be required to deliver these materials to Europa’s ocean.
Abundant endogenic resurfacing and active tidal dissipation on Europa suggests
that among the large icy satellites in our solar system, Europa holds the most potential
for finding life or interesting chemistry near the surface. The formation of surface
features such as domes (Pappalardo and Barr , 2004) and ridges (Nimmo and Gaidos,
2002) on Europa may allow small areas of the surface materials to be mixed into the
subsurface, but an ongoing global mechanism to breach the stagnant lid is required to
sustain a biosphere.
The bottom panel of Figure 5.1 summarizes the geological processes relevant to
astrobiology in Ganymede and Callisto. Unlike an ocean within Europa, which may
be in direct contact with hydrothermal systems on a rocky sea floor, the oceans in
Ganymede and Callisto are sandwiched between outer layers of ice I and high pressure
polymorphs of ice. Liquid water oceans are gravitationally stable between layers of ice
I and the high pressure ice polymorphs because the density of liquid water (1000 kg
m−3) is intermediate between the densities of ice I (930 kg m−3) and the polymorphs
(ρ ∼ 1140 − 1310 kg m−3).
Ganymede and Callisto experience a less intense radiation environment than Eu-
ropa, therefore, fewer oxidants are generated at the surface by particle and radiation

132
Figure 5.1: Summary of processes relevant to astrobiology in the Galilean satellites.Ice on the surfaces of the satellites is chemically modified by radiation from the Jo-vian magnetosphere and cometary impacts and may be delivered to the ocean throughresurfacing events. Decay of radioactive 40K dissolved in the ices and oceans of all threesatellites may provide a source of nutrients as well. Hydrothermal vents at the surface ofthe rocky core may alter the ocean chemistry. Within Ganymede, magmatic activity atthe ice/rock boundary may form pockets of buoyant melt water that could rise throughthe ice II/V/VI mantle and reach the ocean.

133
bombardment. However, abundant dust on the surfaces of these satellites generated
by asteroidal and cometary impacts may provide nutrients for life within the ocean.
As in Europa, decay of 40K may generate oxidants within the icy layers and ocean.
Ganymede’s ocean may receive additional nutrients from the top of its rocky mantle
(Barr et al., 2001). Silicate eruptions at the rock/ice boundary can generate nutrient-
rich pockets of melt water, which are buoyant relative to the surrounding high-density
polymorphs of ice. Provided these pockets of melt are larger than ∼ 600 m, they can
reach the ocean on geologically short time scales (∼ 106 yr). Generation of melt pockets
greater than 600 m in radius requires a magmatic event lasting hours to 10’s of days,
assuming eruption rates similar to volcanic fissures on Io (Wilson and Head , 2001; Barr
et al., 2001).
Despite these sources of nutrients, we do not consider the oceans of Ganymede and
Callisto to be as hospitable to life as the ocean in Europa. If biological activity existed
within these oceans, it would be more difficult to detect than life on Europa. Ganymede
appears to have experienced only limited episodes of resurfacing, so we are less likely
to detect ocean chemistry or life on the surface of Ganymede than on the surface of
Europa. Callisto appears to have experienced essentially no endogenic resurfacing in
the recent geologic past, indicating that detection of a biosphere within Callisto would
require sampling beneath the rigid surface ice, or potentially, within a large impact
crater.
5.4 Onset of Convection
Over millions of years, the behavior of ice can be described as flow of a highly
viscous fluid. The outer ice I shells of large icy satellites are heated from beneath by
decay of radioactive elements in their rocky interiors, and potentially from within by
tidal dissipation. Similar to rock, ice expands when it is heated, so a basally heated or
internally heated ice shell will be gravitationally unstable, and when perturbed, warm

134
ice will rise from the base of the shell. Likewise, cold pockets of ice near the surface
will sink. When this process is self-sustaining over a geologically long time scale, it is
referred to as solid-state convection. If convection can occur in the ice I shell, materials
from the base of the ice shell can be transported to the near surface, and conversely,
material at shallow depths of the ocean can be delivered to the base of the ice shell on a
relatively short time scale. However, if convection can not occur in the ice I shell, mass
can not be exchanged between the shallow sub surface and the ocean unless a complete
melt-through of the ice shell occurs.
Whether convection can occur in an ice layer is governed by the relative balance
of thermal buoyancy forces to viscous restoring forces in the ice. This balance of forces
is expressed by the Rayleigh number,
Ra =ρgα∆TD3
κη(5.1)
where ρ is the density of ice, g is the acceleration of gravity, ∆T is the temperature
difference between the surface of the ice shell, which is held in our models at Ts = 110K,
and the melting temperature of ice, Tm = 260 K. In the definition of the Rayleigh
number, D is the thickness of the layer, κ is the thermal diffusivity, and η is the viscosity
of the ice. Convection can occur in the ice shell if the Rayleigh number exceeds a critical
value (Racr), which depends on the wavelength of initial temperature perturbation
issued to the layer, the geometry of the layer, and the rheology of the fluid.
Here, we summarize the results of Chapter 3 describing the conditions required to
trigger convection in an initially conductive, basally heated ice I shell with the Goldsby
and Kohlstedt (2001) composite rheology for ice and uniform grain size. We charac-
terized the critical Rayleigh number for convection to occur if triggered from an initial
temperature field of form:
T (x, z) = Ts −z∆T
D+ δT cos
(2πD
λx
)
sin
(−zπ
D
)
(5.2)

135
where δT and λ are the amplitude and wavelength of the temperature perturbation,
and z = −D at the warm base of the ice shell. For a given initial condition, we run a
series of convection simulations with decreasing values of Rao, and Racr is defined as
the minimum value of Rao where the system convects for a given initial condition.
The wavelength at which the critical Rayleigh number is minimized for all grain
sizes of ice is found to be λcr = 1.75D. Figure 5.2 illustrates the variation in Rayleigh
number as a function of wavelength for ice shells with uniform grain size of 0.1 mm and
1.0 mm.
In Chapter 3, we determined a relationship between the critical Rayleigh number,
amplitude of temperature perturbation (δT ), and grain size of ice (d), for λ = λcr,
Racr(δT, d) = exp
[
−0.129(ln d)3 −2.98(ln d)2 −22.96(ln d)−42.7
]( δT
∆T
)−0.243. (5.3)
Equation (5.3) can be combined with the definition of the Rayleigh number to obtain
an expression for the critical ice shell thickness as a function of perturbation amplitude
and the grain size of ice:
Dcr =
[
κηo
ρgα∆Texp
[
− 0.129(ln d)3 − 2.98(ln d)2 − 22.96(ln d) − 42.7]( δT
∆T
)−0.243]1/3
,
(5.4)
where the reference viscosity is defined as:
ηo =d2
Aexp
( Q∗v
RTm
)
, (5.5)
where d is the grain size of ice, A is the pre-exponential parameter for volume diffusion
with Tm = 260 K, Q∗v is the activation energy for volume diffusion, and R is the gas
constant. Thermal and physical parameters used for the ice shells are summarized in
Table A.1.
Figure 5.3 illustrates the critical ice shell thickness for convection in the icy
Galilean satellites, given a temperature perturbation with λ = 1.75D and amplitude
between 3 and 30 K. For grain sizes of ice 1-10 mm, the critical shell thickness for con-
vection is close to the maximum permitted shell thickness in the satellites. For grain

136
2.00
2.25
2.50
Ra c
r
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50
Ra c
r
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50
Ra c
r
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
2.00
2.25
2.50
Ra c
r
1.2 1.4 1.6 1.8 2.0 2.2 2.4Wavelength (λ/D)
x 106
d=0.1 mm
d=1.0 mm
Figure 5.2: Determination of critical wavelength for ice with grain sizes 0.1 mm and1.0 mm. In both cases, the critical Rayleigh number is weakly dependent upon thewavelength of perturbation, varying by 5% as λ is changed from 1.2D to 2.4D. Theminimum critical Rayleigh number for both grain sizes of ice occurs at a wavelength ofλ = 1.75D.

137
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
Dmax = 170 km
Europa
Dmax = 170 km
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)
10-4 10-310-3 10-2 10-1
d (m)
Dmax = 170 km
Ganymede
Dmax = 160 km
1
1010
100
Dcr
(km
)10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)10-4 10-310-3 10-2 10-1
d (m)
1
1010
100
Dcr
(km
)10-4 10-310-3 10-2 10-1
d (m)
Dmax = 160 km
Callisto
Dmax = 180 km
Figure 5.3: Critical ice shell thickness for convection as a function of grain size in Europa(left panel), Ganymede (middle panel), and Callisto (right panel). The critical shellthickness for convection varies by a factor of ∼ 1.25 as the temperature perturbation isvaried from 3 K (bold line) to 30 K (thin line).
138
sizes larger than 10 mm, the critical shell thickness decreases due to the low viscosities
in the ice shell when deformation is accommodated by dislocation creep. For grain sizes
smaller than 1 mm, the critical shell thickness is small because volume diffusion accom-
modates deformation during the onset of convection and results in low viscosities near
the base of the ice shell.
5.5 Convective Recycling of the Ice Shell
In Chapter 4 we used numerical simulations of convection in ice I with a composite
Newtonian and non-Newtonian rheology to characterize how the efficiency of convective
heat transport varied as a function of grain size and ice shell thickness. Here we extend
the analysis to describe the time scale over which mass is transported across the ice
shell, the thickness of the stagnant lid, and the mass flux delivered to the base of the
stagnant lid by convection.
To begin to characterize the behavior of the ice shells as a function of grain size
and thickness with a composite Newtonian and non-Newtonian rheology, we perform
a limited, but systematic search of the parameter space of grain sizes and ice shell
thickness. We use values of shell thickness of 20 to 100 km, and ice grain sizes of 0.1- 30
mm. Each simulation is started from a uniform initial condition given by equation (5.2).
If convection could not occur with δT =7.5 K, an additional simulation is performed with
δT=37.5 K. In most cases where convection did not initiate from an initial temperature
perturbation of 7.5 K, convection did not initiate from the larger perturbation either.
When D = 60 km, and d = 1.0 mm, Rao ∼ Racr, and convection is triggered in the
shell with a perturbation of 37.5 K, but not from the smaller 7.5 K perturbation. In
this case, convection is extremely sluggish, confined to the bottom 40% of the shell.
We have implemented the composite rheology for ice in the finite-element convec-
tion model Citcom (Moresi and Gurnis, 1996; Zhong et al., 1998, 2000), which solves
the governing equations of thermally-driven convection in an incompressible fluid. Our

139
simulations are run in 2D Cartesian geometry, and free-slip boundary conditions are
used on the surface (z = 0), base (z = −D), and side walls (x = 0, xmax) of the domain.
The simulations used to characterize the convective heat flux and used for analysis
in this section are performed in a domain with 64 x 64 elements, chosen to allow sufficient
numerical resolution across the rheological boundary layer between the stagnant lid and
convecting interior for simulations where Ra ≫ Racr. To ensure numerical stability,
the values of viscosity are not permitted to fall below 10−7ηo or exceed 107ηo. In the
vast majority of cases, the upper limit is reached near the cold surface of the ice shell,
but the lower limit of viscosity is not reached. All simulations are run until the Nusselt
number converges to within 0.01% per time step.
Figure 5.4 illustrates the parameter space explored, and which parameter sets
resulted in convection. The scaling relationship between the critical ice shell thickness
for convection and the grain size of ice (equation 5.4) for δT = 7.5 K is shown for
comparison. For large shell thickness D ≥ 100 km and grain sizes d ≤ 3 mm and d ≥ 30
mm, the effective Rayleigh number of the ice shell is greater than 109, which did not
permit solutions to be found given the numerical resolution used.
5.5.1 Geophysical Descriptive Parameters
Figure 5.5 illustrates the convective temperature field with superimposed velocity
vectors, time evolution of the dimensonless heat flux (Nusselt number, Nu), and plots
of the total viscosity, effective viscosity due to volume diffusion, grain boundary sliding
and basal slip (collectively, grain size-sensitive, or GSS creep), and dislocation creep for
a sample simulation in our study with 0.3 mm in an ice shell 85 km thick. With a small
grain size, deformation in the ice shell is controlled by volume diffusion, which yields
small viscosities in the convecting sub-layer of the ice shell and vigorous convection.
Figure 5.6 shows a similar plot, for convection in ice with a grain size of 30 mm in an ice
shell 85 km thick. For this value of grain size, deformation in the ice shell is controlled

140
largely by dislocation creep, which is highly non-Newtonian. In both cases, convective
motion is confined beneath a stagnant lid which occupies the top 25% of the ice shell,
and the horizontal structure of the flow fields are similar.
The middle panel of Figure 5.7 demonstrates the definition of stagnant lid thick-
ness from the profile of the magnitude of velocity, consistent with the definition of
Solomatov and Moresi (2000). The thickness of the stagnant lid depends on grain size,
and increases as a function of grain size from 0.1 mm - 1 mm as GSS creep is activated
and the ice becomes more viscous. When the grain size of ice is between 3 and 10 mm,
convection does not occur and the entire ice shell remains essentially motionless.
When the grain size is increased to 30 mm, ice shells thinner than 100 km are
able to convect and the thickness of the stagnant lid is of order 30-50% of the shell
thickness. Figure 5.8 illustrates the variation in stagnant lid thickness as a function of
grain size for several values of ice shell thickness.
The left panel of Figure 5.7 illustrates the internal convective temperature based
on the temperature profile in the convecting ice shell, consistent with the definition
of Solomatov and Moresi (2000). The internal convective temperature is given by the
maximum horizontally averaged temperature above the bottom thermal boundary layer.
Beneath the stagnant lid, the ice shell warms to a temperature close to its melting point,
between 250 and 252 K, which is essentially independent of grain size.
The viscosity of the ice shell in the convecting interior is typically of order 1013
Pa s when the grain size of ice is small, 0.1 mm - 0.3 mm and volume diffusion controls
flow. For larger grain sizes the viscosity in the convecting interior is of order 1014 to
1015 Pa s, and convection is sluggish.
5.5.2 Astrobiologically Relevant Parameters
The mass flux of ice delivered to the base of the stagnant lid is calculated from
the mean value of the magnitude of vertical velocity beneath the stagnant lid, (〈vz〉). To

141
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
20
40
60
80
100
D (
km)
10-410-4 10-3 10-2 10-1
d (m)
Figure 5.4: Parameter space of grain size (d) and ice shell thickness (D) explored in thisstudy. Crosses indicate that convection did occur, triggered from an initial temperatureperturbation of 7.5 K. Filled squares indicate that convection did not occur in the iceshell, even when the temperature perturbation is 37.5 K. When D=60 km and d=10−3
m, Ra ∼ Racr, and convection initiated from a temperature perturbation of 37.5 K, butnot from the smaller 7.5 K perturbation.

142
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
a)
120
140
160
180
200
220
240
260T (K)
1
2
3
4
Nu
0 50 100
t (Myr)
b)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
c)
13141516171819202122
log η (Pa s)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)d)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)e)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)f)
Figure 5.5: Convection in an ice shell 85 km thick with a grain size of 0.3 mm. (a)Convective temperature field with superimposed velocity vectors, (b) time evolution ofthe dimensionless heat flux, or Nusselt number (Nu). (c) The total viscosity, (d) effectiveviscosity due to volume diffusion, (e) GSS creep, and (f) dislocation creep. Convectionis confined beneath a stagnant lid approximately 22 km thick, and the Nusselt numberis 3.03, corresponding to a heat flux of 17.64 mW m−2. Deformation in the ice shellis controlled by volume diffusion, which predicts the smallest viscosities of the fourmechanisms. The effective viscosity due to dislocation creep is much greater than 1022
Pa s, indicating that the contribution to the total strain rate from dislocation creep isnegligible in the ice shell under these conditions. Contours of constant viscosity, whereeach contour line represents a factor of 10 increase in viscosity, are shown for dislocationcreep to illustrate that the viscosity field mirrors the temperature field, even when theviscosity is strongly stress-dependent.

143
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
a)
120
140
160
180
200
220
240
260T (K)
1
2
3
4
Nu
0 50 100
t (Myr)
b)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
-80
-60
-40
-20
0
Dep
th (
km)
0 20 40 60 80
X (km)
c)
13141516171819202122
log η (Pa s)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)d)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)e)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
-80
-60
-40
-20
Dep
th (
km)
20 40 60 80
X (km)
13141516171819202122
log η (Pa s)f)
Figure 5.6: Similar to Figure 5.5, but the grain size of ice is 30 mm. Convection is stillconfined beneath a stagnant lid approximately 22 km thick, but here, deformation iscontrolled by dislocation creep (n = 4), which predicts the smallest viscosities of thefour mechanisms. Slight fluctuations to the total viscosity at the 1% level are introducedby GSS creep. The heat flux across the ice shell is 16.67 mW m−2, corresponding to aNusselt number of 2.88.
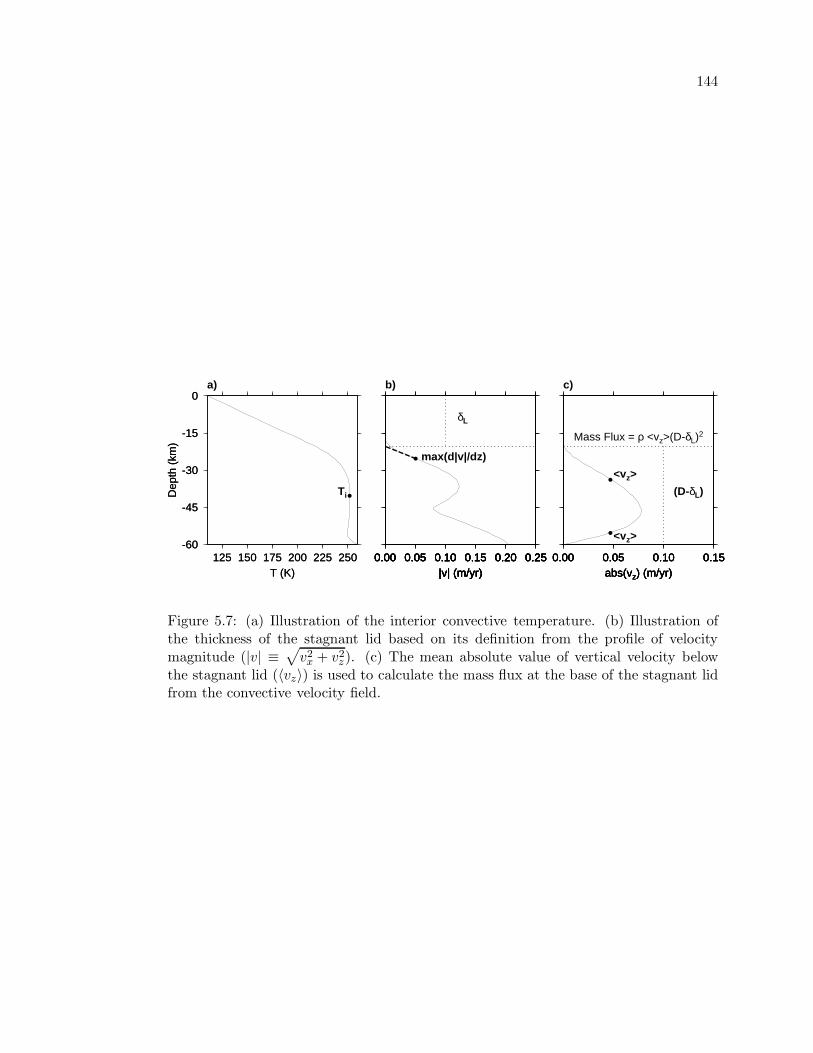
144
-60
-45
-30
-15
0
Dep
th (
km)
125 150 175 200 225 250T (K)
-60
-45
-30
-15
0
Dep
th (
km)
125 150 175 200 225 250T (K)
Ti
a)
0.00 0.05 0.10 0.15 0.20 0.25|v| (m/yr)
0.00 0.05 0.10 0.15 0.20 0.25|v| (m/yr)
max(d|v|/dz)
b)
0.00 0.05 0.10 0.15 0.20 0.25|v| (m/yr)
0.00 0.05 0.10 0.15 0.20 0.25|v| (m/yr)
0.00 0.05 0.10 0.15 0.20 0.25|v| (m/yr)
δL
0.00 0.05 0.10 0.15abs(vz) (m/yr)
0.00 0.05 0.10 0.15abs(vz) (m/yr)
0.00 0.05 0.10 0.15abs(vz) (m/yr)
<vz>
<vz>
c)
0.00 0.05 0.10 0.15abs(vz) (m/yr)
(D-δL)
Mass Flux = ρ <vz>(D-δL)2
Figure 5.7: (a) Illustration of the interior convective temperature. (b) Illustration ofthe thickness of the stagnant lid based on its definition from the profile of velocitymagnitude (|v| ≡
√
v2x + v2
z). (c) The mean absolute value of vertical velocity belowthe stagnant lid (〈vz〉) is used to calculate the mass flux at the base of the stagnant lidfrom the convective velocity field.

145
0
25
50
75
δ L (
km) D=85 km
0
25
50
75
δ L (
km)
0
25
50
75
δ L (
km)
No Convection
0
25
50
75
δ L (
km) D=75 km
0
25
50
75
δ L (
km)
0
25
50
75
δ L (
km)
No Convection
0
25
50
δ L (
km) D=60 km
0
25
50
δ L (
km)
0
25
50
δ L (
km)
No Convection
0
25
δ L (
km)
10-410-4 10-3 10-2 10-1
d (m)
D=35 km
0
25
δ L (
km)
10-410-4 10-3 10-2 10-1
d (m)
0
25
δ L (
km)
10-410-4 10-3 10-2 10-1
d (m)
No Convection
Figure 5.8: Variation in the thickness of the stagnant lid (δL) with grain size of ice(d). For grain sizes less than 3.0 mm, as the grain size of ice is increased, GSS creep isactivated, causing the ice to stiffen, resulting in sluggish convection and an increase instagnant lid thickness with grain size. For intermediate grain sizes 3 − 10 mm, the iceis too stiff to convect. When dislocation creep is activated in ice with a grain size of 30mm, convection can occur, resulting in a relatively thin stagnant lid.

146
calculate the mass flux, we average the absolute value of the vertical velocity (abs(vz))
beneath the stagnant lid and multiply by the density of ice and thickness of the con-
vecting sub-layer to obtain a mass flux,
M = ρ〈vz〉(D − δL)2, (5.6)
where by multiplying by (D− δL)2 we have implicitly assumed that the structure of the
flow field in the third unused y dimension is the same as the x dimension. The right
panel of Figure 5.7 demonstrates the definition of the mass flux. Figure 5.9 illustrates
the variation in mass flux as a function of grain size for various values of shell thickness.
When convection does not occur, the mass flux is zero.
When convection occurs, the mass flux delivered to the base of the stagnant lid
is of order 109 to 1013 kg yr−1, and is strongly dependent on the grain size of ice, which
controls the vigor of convection. Assuming 1 cell cm−3, as estimated by Chyba and
Phillips (2002) is sustained in Europa’s ocean due to equilibration of surface ices, and
the efficiency of entrainment of oceanic microbes in the ice shell is 100%, 1021 to 1025
cell yr−1 could be delivered to the base of the stagnant lid each year, where endogenic
resurfacing events would be required to deliver them to the surface.
The time scale to recycle the convecting sub layer of the ice shell can be calculated
from the mean vertical velocity,
τrecyc =(D − δL)
〈vz〉. (5.7)
Figure 5.10 illustrates the variation in recycling time scale as a function of grain size for
a variety of ice shell thicknesses. When convection does not occur, the recycling time
scale for the ice shell is essentially infinite, and is not displayed on the plot.
When convection occurs, cycling of the material beneath the stagnant lid within
the ice shell is fast, and occurs on time scales less than the 107 yr surface age of Europa.
The recycling time scales are 105 to 107 yr, which indicates that sufficient chemical

147
109
10101010
1011
1012
1013
M (
kg y
r-1)
109
10101010
1011
1012
1013
M (
kg y
r-1)
109
10101010
1011
1012
1013
M (
kg y
r-1) D=85 km
No Convection
109
10101010
1011
1012
1013M
(kg
yr-1
)
109
10101010
1011
1012
1013M
(kg
yr-1
)
109
10101010
1011
1012
1013M
(kg
yr-1
) D=75 km
No Convection
109
10101010
1011
1012
1013
M (
kg y
r-1)
109
10101010
1011
1012
1013
M (
kg y
r-1)
109
10101010
1011
1012
1013
M (
kg y
r-1) D=60 km
No Convection
109
10101010
1011
1012
1013
M (
kg y
r-1)
10-410-4 10-3 10-2 10-1
d (m)
109
10101010
1011
1012
1013
M (
kg y
r-1)
10-410-4 10-3 10-2 10-1
d (m)
109
10101010
1011
1012
1013
M (
kg y
r-1)
10-410-4 10-3 10-2 10-1
d (m)
D=35 km
No Convection
Figure 5.9: Mass flux of ice delivered to the base of the stagnant lid through convectivecirculation as a function of grain size of ice, for ice shell thicknesses from 85 km (toppanel) to 35 km (bottom panel). The mass fluxes are of order 109 to 1013 kg yr−1. Whenconvection does not occur, the mass flux is zero and is not displayed on the graph.

148
105
106106
107
τ rec
yc (
yr)
105
106106
107
τ rec
yc (
yr)
105
106106
107
τ rec
yc (
yr) D=85 km
No Convection
105
106106
107τ r
ecyc
(yr
)
105
106106
107τ r
ecyc
(yr
)
105
106106
107τ r
ecyc
(yr
) D=75 km
No Convection
105
106106
107
τ rec
yc (
yr)
105
106106
107
τ rec
yc (
yr)
105
106106
107
τ rec
yc (
yr) D=60 km
No Convection
105
106106
107
τ rec
yc (
yr)
10-410-4 10-3 10-2 10-1
d (m)
105
106106
107
τ rec
yc (
yr)
10-410-4 10-3 10-2 10-1
d (m)
105
106106
107
τ rec
yc (
yr)
10-410-4 10-3 10-2 10-1
d (m)
No Convection
D=35 km
Figure 5.10: Time scale (τrecyc) to recycle the convecting sublayer of the ice shell definedin equation (5.7). The recycling time scales are of order 105 to 107 years, however,resurfacing events are likely required to permit exchange of materials across the stagnantlid.

149
energy can be delivered to the ocean to permit the possibility of a biosphere powered by
decay of 40K, which is generated within the ice shell and can be delivered by convection
alone. The thick stagnant lid present at the surface of the ice shell prevents convective
motions from reaching the surface, so a biosphere powered by radiation products from
the surface of Europa, requires resurfacing events to breach the stagnant lid. Resurfacing
events are also required to deliver microbes or interesting ocean chemistry directly to
the surfaces of the satellites.
5.6 Endogenic Resurfacing Events on Europa
Regardless of which deformation mechanism acommodates convective strain in
the ice shell, the viscosity of ice is strongly temperature dependent, leading to the
formation of a thick stagnant lid of cold ice near the surface of the ice shell. However,
the presence of abundant endogenic resurfacing on Europa and Ganymede suggests that
convective motions can breach the stagnant lid.
Here we discuss two methods of surface/sub-surface exchange that could enable
material from the convecting zone to reach the relatively shallow subsurface where
ocean chemistry and potentially, microbial life, could be sampled by a lander, or permit
radiation products from the surface to reach the convecting sub-layer. We focus on
the role of extrusive domes on Europa and the formation of double ridges, which are
features that have been addressed in studies performed in conjunction with this thesis.
5.6.1 Domes
A large number of circular and quasi-circular pits, spots, and domes, collectively
referred to as “lenticulae,” have been observed on Europa. The sizes of these features
range from 1-10’s of km with a mean diameter of ∼ 7 km (Spaun, 2001), and uplifts
of order 100 m. Based on their morphologies and similarity in size and spacing, it has
been suggested that they form due to thermal convection in an ice shell 10’s of km thick

150
(Pappalardo et al., 1998). Dynamic topography from our convection models appropriate
for Europa’s ice shell indicate that uplifts due to thermal convection alone are of order 10
m (Figure 5.11), consistent with results from Newtonian convection models (Showman
and Han, 2004).
Domes on Europa may represent diapiric upwellings of relatively salt-free ice in a
water ice plus hydrated salt ice shell, where compositional and thermal buoyancy act in
concert to form uplifts of 100’s of meters with percentage-level differences in composition
(Pappalardo and Barr , 2004). Density differences due to compositional variations in
the ice shell that drive diapiric rise can easily exceed the density differences due to
thermal buoyancy. The maximum convective stress in the ice shell is (McKinnon, 1998;
Pappalardo and Barr , 2004):
σmax ∼ 0.1ρigα∆TD (5.8)
where ρi is the density of pure water ice. The maximum thermal available to drive
thermal convection is
∆ρconv ∼ 0.1ρiα∆T, (5.9)
which is approximately 1.4 kg m−3 if the density of ice is 930 kg m−3. The density
difference between salt-free ice and ice doped with salt is
∆ρcompositional ∼ φ(ρle − ρi) (5.10)
where φ is the volume fraction of low-eutectic salts that will melt out of the ice shell
upon heating, and ρle is the density of the low-eutectic salt (Pappalardo and Barr ,
2004). The density difference due to compositional variations in the ice shell will exceed
the density difference due to thermal expansion when
φ >0.1ρiα∆T
(ρle − ρi). (5.11)
If the density of the low-eutectic salts is 1500 kg m−3 (Pappalardo and Barr , 2004),
compositional buoyancy dominates over thermal buoyancy for φ > 0.003. Therefore,

151
-50
-25
0
25
50
h top
o (m
)
-50
-25
0
25
50
h top
o (m
)
-50
-25
0
25
50
h top
o (m
)
-50
-25
0
25
50
h top
o (m
)
-50
-25
0
25
50
h top
o (m
)
-50
-25
0
25
50
h top
o (m
)
D=85 km D=75 km
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
-50
-25
0
25
50
h top
o (m
)
10-410-4 10-3 10-2 10-1
d (m)
D=60 km
10-410-4 10-3 10-2 10-1
d (m)10-410-4 10-3 10-2 10-1
d (m)10-410-4 10-3 10-2 10-1
d (m)10-410-4 10-3 10-2 10-1
d (m)10-410-4 10-3 10-2 10-1
d (m)10-410-4 10-3 10-2 10-1
d (m)
D=35 km
Figure 5.11: Dynamic topography from convection on Europa for D = 85 km (top, left),D = 75 km (top, right), D = 60 km (bottom, left) and D = 35 km (bottom, right).Filled squares indicate the maximum and minimum topography in meters. The surfaceof the convecting layer is drawn down by up to 50 meters, and upwellings are limitedto 10’s of meters.

152
a difference in volumetric salt content > 0.3 % can provide more driving stress for
the formation of domes on Europa than thermal buoyancy. Driven by compositional
buoyancy, diapirs responsible for dome formation may be able to extrude onto the
surface of Europa, or in some cases stall in the shallow subsurface to form an uplifted
plateau.
The approximate volume of ice erupted onto the surface during a dome formation
event is approximately πr2h ∼ 3×1015 cm 3 for a dome with a radius of 3.5 km and height
of 100 m. If the material contained in the dome is transported directly from the ocean
without dilution, up to 3×1015 cells (assuming the concentration of microbes predicted
by Chyba and Phillips (2002)) or 3 × 1021 cells (assuming the microbe concentration
predicted by Chyba and Hand (2001)) could be contained within the erupted diapir
head. Detecting such microbes would require drilling to a depth of greater than 1
meter, beneath the layer of surface ice that has been chemically modified by particles
and radiation.
5.6.2 Ridges
The most common features on Europa’s surface are double ridges, which consist of
ridge pairs each separated by a central trough (Greeley et al., 1998). Ridges are typically
a few kilometers wide and up to several hundred kilometers long; many exhibit signs
of strike-slip faulting with offsets of ∼ 1 to 10 km (Hoppa et al., 1999). One proposed
method of ridge formation suggests that double ridges form in response to frictional
heating of the ice crust as fault blocks slide past one another in response to tidal flexing
of the shell (Nimmo and Gaidos, 2002). Friction between the moving fault blocks causes
localized heating due to viscous dissipation along the fault plane, local thinning of the
brittle lithosphere, and thermally driven upwelling, which may form the uplifted ridge
structure (Nimmo and Gaidos, 2002). If melting occurs along the fault zone and can
drain vertically into the convecting portion of the ice shell, it could become incorporated

153
into a convective downwelling and potentially drain to the ocean, providing a means by
which surface material could be buried on geologically short time scales (Barr et al.,
2002).
5.7 Ocean Stability
The results of Chapter 4 indicate that when convection occurs, efficient convective
heat transfer across the shell can lead to freezing of the internal oceans in the satellites.
When convection occurs, the ice shells thicken by meters per year, which over geological
time scales can cause the vigor of convection to increase, leading to runaway freezing of
the ocean. Furthermore, the present heat flux from radiogenic heating in the interiors
of a Ganymede- and Callisto-like satellite cannot provide enough heat to maintain an
internal liquid water ocean in the absence of tidal heating, even if the ice shell cannot
convect. Oceans are marginally stable beneath non-convecting ice shells 1.5 billion years
ago when radiogenic heat fluxes were twice their present values. Tidal dissipation may
play a role in providing additional heat to the ice shells to offset efficient heat transport
by convection, however, the details of the interaction between tidal dissipation and
convection are not well-constrained. The presence of liquid water oceans in Callisto
today suggests that some non-water-ice material is present to depress the freezing point
of the ice shell. The presence of a liquid water ocean in Ganymede at present suggests
that the freezing point of the shell is depressed, or that remnant energy from passage
through a tidal resonance or cooling of Ganymede’s core is maintaining the ocean at
present. Therefore, even if the oceans of the satellites are habitable, tidal flexing of the
ice shells or non-water-ice materials may be required to prevent the oceans from freezing
and permit biological activity.

154
5.8 Summary
Under what conditions can convection occur? The critical ice shell thickness for
convection is a strong function of the grain size of ice and the amplitude and wavelength
of temperature perturbation issued to the ice shell. For small grain sizes (d < 1 mm)
the critical shell thickness for convection is < 30 km, because convective strain is ac-
commodated by volume diffusion and the viscosity at the base of the ice shell is small.
For large grain sizes (d > 10 mm), the critical shell thickness for convection is also
small, because strain is accommodated by dislocation creep, permitting low viscosities
at the base of the ice shell. For intermediate grain sizes, the critical shell thickness for
convection maximizes at 130 km.
When convection occurs, the stagnant lid thickness, convective heat flux, and
vigor of the convection are critically dependent on the grain size of ice. When convection
occurs, it provides swift and efficient recycling of the material beneath the stagnant lid.
The mass flux of ice delivered to the base of the stagnant lid is of order 109 - 1013 kg
yr−1, and the time scale for recycling of ice between the base of the shell and the base
of the stagnant lid is of order 105 to 107 yr.
However, resurfacing events are required to breach the stagnant lid to bring po-
tential microbes to the relatively shallow subsurface where they might be detected by
landed spacecraft. We view domes and double ridges on Europa as potential sites where
interesting ocean chemistry may be entrained in the shallow subsurface, either directly,
by extrusive cryovolcanism, or indirectly through passive thermal uplift.

Chapter 6
Conclusions and Future Work
6.1 Answers to the Key Questions
In this thesis, the following questions have been addressed:
What are the conditions required to initiate convection in an initially
conductive ice I shell with a non-Newtonian rheology?
The convective stability of a non-Newtonian ice shell can be judged by comparing
the Rayleigh number of the shell to a critical value. Previous studies suggest that the
critical Rayleigh number for a non-Newtonian fluid depends on the initial conditions
in the fluid layer, in addition to the thermal, rheological, and physical properties of
the fluid. We seek to extend the existing definition of the critical Rayleigh number
for a non-Newtonian, basally heated fluid by quantifying the conditions required to
initiate convection in an ice I layer initially in conductive equilibrium. The critical
Rayleigh number for the onset of convection in ice I varies as a power (-0.6 to -0.5)
of the amplitude of the initial temperature perturbation issued to the layer, when the
amplitude of perturbation is less than the rheological temperature scale. For larger
amplitude perturbations, the critical Rayleigh number achieves a constant value. The
critical Rayleigh number is characterized as a function of surface temperature of the
satellite, melting temperature of ice, and rheological parameters so that the results
presented here may be extrapolated for use with other rheologies and for a generic large
icy satellite. The values of critical Rayleigh number imply that triggering convection

156
from a conductive equilibrium in a pure ice shell less than 100 km thick in Europa,
Ganymede, or Callisto requires a large, localized temperature perturbation of 1-10’s K
to soften the ice, and therefore may require tidal dissipation in the ice shell.
How do the conditions required to trigger convection in an ice I shell
change if a composite Newtonian and non-Newtonian rheology for ice I is
used?
When a composite Newtonian and non-Newtonian rheology for ice I is used, the
critical Rayleigh number for convection varies as a power (−0.2) of the amplitude of ini-
tial temperature perturbation, for perturbation amplitudes between 3 K and 30 K. The
critical Rayleigh number depends strongly on the grain size of ice, which governs the
transition stresses between the Newtonian and non-Newtonian deformation mechanisms.
The critical ice shell thickness for convection in all three satellites is < 30 km if the ice
grain size is <1 mm. In this case, the relatively low thermal stresses associated with
plume growth are not sufficient to activate weakly non-Newtonian grain-size-sensitive
(GSS) creep, so plume growth is controlled by Newtonian volume diffusion. The critical
shell thickness is <30 km for grain sizes >1 cm, where thermal stresses can activate
strongly non-Newtonian dislocation creep, and the ice softens as it flows. For interme-
diate grain sizes (1-10 mm), weakly non-Newtonian grain-size-sensitive creep controls
plume growth, yielding critical shell thicknesses close to the maximum permitted shell
thickness for each of the Galilean satellites. Regardless of the rheology that controls
initial plume growth, a finite amplitude temperature perturbation is required to soften
the ice to permit convection, and this may require tidal dissipation.
Given a composite rheology for ice I, are oceans beneath a layer of
ice I thermodynamically stable against heat transport by convection and
conduction?
Basally heated shells 20 - 100 km thick with assumed uniform grain size of ≤ 0.3
mm convect vigorously with heat fluxes between 30-40 mW m−2 because Newtonian

157
volume diffusion accommodates convective strain and results in low ice viscosities in
the convecting sub-layer. If the ice has a grain size ≥ 30 mm, dislocation creep accom-
modates strain, convection is sluggish, and convective heat fluxes are 15 - 20 mW m−2.
When convection occurs in the absence of tidal dissipation, the heat flux across an ice
shell can exceed the radiogenic heat flux, casuing the ice shell to thicken by meters per
year. If the ice shell has a grain size of 3-10 mm, it cannot convect if < 100 km thick,
permitting internal oceans to be thermodynamically stable in a Ganymede/Callisto-like
satellite in the absence of tidal dissipation or non-water-ice materials, given chondritic
heating rates appropriate for 1.5 billion years ago. If the melting point of the ice shell
is depressed due to the presence of non-water-ice materials such as sulfuric acid hydrate
or ammonia, oceans may be stable beneath conductive ice shells. If tidal dissipation
occurs in the ice I shell, additional heat may be supplied to balance efficient heat trans-
port, and may permit oceans to be thermodynamically stable. If tidal dissipation is
capable of changing the mode of heat transport across the ice I shell, the tidal and
convective/conductive heat fluxes are linked quantities. More detailed modeling of tidal
dissipation is necessary to clarify how tidal heat is spatially localized in the ice shell,
and to investigate whether a feedback between tidal heating and convection occurs.
Does convection play a role in enhancing the habitability of the internal
oceans of the icy satellites?
If convection occurs in an ice I layer, fluid motions are confined beneath a thick
lid of immobile ice, approximately 30 to 50% of the thickness of the ice shell. The
thickness of the stagnant lid is dependent on the grain size of ice. Convective motions
deliver 109 to 1013 kg yr−1 of ice to the base of the stagnant lid where resurfacing events
such as the formation of domes or ridges on Europa may deliver the ice onto the surface.
Triggering convection in an initially conductive ice I shell requires modest amplitude (a
few to 10’s K) temperature anomalies to soften the ice to permit convection, which may
require tidal dissipation. Therefore, tidal and compositional effects may be required to

158
permit communication between the surfaces and oceans of the satellites.
6.2 Future Work
6.2.1 Grain Size Evolution
Conclusions regarding the convective stability and heat flux of the ice shells drawn
from this study are strongly dependent on the grain size of ice. A uniform grain size has
been assumed in all models of the ice shells presented in this thesis. However, the grain
size of ice in the shells of the satellites likely changes as a function of depth, temperature,
total accumulated convective strain, strain rate, and impurity content in the ice shell.
By analogy with terrestrial ice sheets, ice shelves, and the Earth’s mantle, a
complex suite of processes is likely to occur within the ice shells of the satellites to
cause grain sizes to evolve as the temperature and velocity field in the shells change.
If grain growth or destruction occurs in ice, the change in grain size may cause the
controlling deformation mechanism to change, changing the rheology of ice.
Flow by certain microphysical deformation mechanisms may cause the grain size
of the ice to change. For example, flow by dislocation creep is likely to lead to smaller
grain sizes, whereas flow by grain boundary sliding or diffusional flow is likely to lead
to grain growth (e.g. De Bresser, et al., 1998). Based on laboratory observations
using a metallic rock analog that deforms by diffusional flow and dislocation creep, De
Bresser et al. (1998) argue for a scenario wherein the grains of the material dynamically
recrystallize as the material strains. At each temperature and stress, the material has
a grain size such that the strain rates from dislocation creep and diffusional flow are
equal. A similar effect could be occurring in ice, wherein the grain size dynamically
evolves such that the strain rates from GSS creep and dislocation creep are equal. The
grain size that results in equal strain rates from each mechanism would depend on the
temperature of the ice, and would increase as the temperature decreased.

159
In future modeling efforts, the initial conditions in the ice shell, the evolution of
grain size and grain orientation, and the role of tidal flexing of the ice shell (McKinnon,
1999), and heating by tidal dissipation in changing the grain size of ice will factor into
the behavior of the ice shell, both at the onset of convection, and in convecting ice
shells. Therefore, we advocate using a more realistic grain size model in future work,
by allowing grain size to evolve dynamically as the ice flows.
6.2.2 Tidal Dissipation
Although estimates of the tidal dissipation rates exist for the Galilean satellites,
the details of how tidal dissipation occurs and where it is concentrated within the
satellites are unknown. The role that tidal heating may play in modifying the behavior
of the ice I shells depends on the rheology of ice and a detailed description of the physical
processes responsible for tidal dissipation.
Tidal dissipation could modify the mode of heat transport within the outer ice
I shells of the satellites, by potentially triggering convection in an initially motionless
conductive shell, or squelching convection by generating heat fluxes in excess of the
maximum convective heat flux, resulting in melting at the base of the ice shell. If tidal
heating changes the mode of heat transport in the ice shells, a detailed description of
tidal dissipation must be included in any study of the thermodynamic stability of oceans
in tidally heated satellites. Although the details of tidal heating are not known, some
insight into how tidal dissipation may change the behavior of the ice shells can be gained
by estimating the total amount of heat that may be deposited in the ice shells satellites.
Tidal dissipation must be horizontally localized on length scales similar to λcr ∼
1.75D to generate initial temperature perturbations capable of triggering convection in
the ice I shells of the Galilean satellites. Several models of tidal dissipation in the ice
shell of Europa have been proposed in the literature, each of which predicts a different
spatial pattern of tidal dissipation in the ice shell. The likelihood that tidal dissipation

160
will become spatially localized in the ice shell to generate temperature perturbations to
the ice shell similar to the perturbations used in Chapters 2 through 4 is discussed here.
Tidal effects on the Galilean satellites have endured over geologically long time
scales due to the Laplace resonance between Io, Europa, and Ganymede. Secular per-
turbations on the system due to the resonance among the satellites causes the forced
component of their orbital eccentricities to be replenished on a time scale much shorter
than the eccentricity damping time scale. The persistent non-zero orbital eccentricities
of the satellites results in ongoing dissipation of orbital energy in their interiors, which
undoubtedly drives volcanism on Io (Peale et al., 1979), and may play a role in forming
the interesting geology on the surfaces of Europa and Ganymede discussed in Chapter
1.
As discussed in Chapters 1 and 4, the rate of energy dissipation within a satellite
in eccentric orbit around Jupiter is given by (Peale and Cassen, 1978):
E =21
2
k
Q
R5sGM2
Jne2
a6, (6.1)
where k is the Love number describing the response of satellite’s gravitational to the
applied tidal potential, Rs is the radius of the satellite, G is the gravitational constant,
MJ is the mass of Jupiter, n is the satellite’s mean motion, e is the orbital eccentricity,
Q is the tidal quality factor describing the fractional orbital energy dissipated per cycle,
and a is the semi-major axis of the satellite’s orbit about Jupiter.
The strong 1/a6 dependence in equation (6.1) indicates that dissipation of energy
in the Galilean satellite system will be highest in Io, which is closest to Jupiter, and
the amount of energy dissipation in Europa and Ganymede will be smaller. Also, the
eccentricity of the satellite’s orbit appears as e2, so increasing the eccentricity of the
satellite’s orbit can have profound effects on the thermal state of its interior. In the case
of Ganymede, a tenfold increase in its orbital eccentricity can cause widespread melting
in the interior provided kQ changes on a longer time scale (Showman and Malhotra,

161
1997).
The value of Love number k and the tidal quality factor Q are shorthand for
a tremendous amount of physics that describes the deformation occurring within a
viscoelastic satellite in response to the applied tidal force. An upper bound on k of 0.25
can be obtained assuming the satellite has an essentially zero rigidity, and exhibits a
hydrostatic response to the applied tidal potential. A satellite with a thin floating ice
shell might exhibit such a response (Moore and Schubert , 2000). If the satellite does
not have an internal ocean, and the ice I layer is rigidly coupled to the rock or ice
layers within the satellite, k becomes very small. For example, if Ganymede does not
have an ocean, k ∼ 0.02 (Murray and Dermott , 1999). Because the tidal dissipation is
proportional to k, and k ∼ 0 for a satellite without an internal water ocean, it is likely
that tidal dissipation in an icy satellite can only help to maintain an ocean, not create
an ocean.
The tidal quality factor, Q, expresses the fractional energy dissipated per cycle:
Q =2πEo∮
Edt(6.2)
where Eo is the orbital energy of the satellite. Values of the tidal quality factor are
not well constrained for any satellite in the solar system other than Earth’s moon, but
Q ∼ 100 is commonly assumed for the icy satellites (Murray and Dermott, 1999 and
references therein.) The value of Q for the satellite depends on the amount of non-
recoverable viscous deformation that occurs within the satellite over a single orbital
cycle. For a viscoelastic satellite, the Love number k is complex, and the amount of
energy lost per cycle is proportional to the imaginary part of k (Segatz et al., 1988):
E =21
2Im(k)
(nRs)5
Ge2. (6.3)
In the Galilean satellites, tidal dissipation serves as an important heat source in the
outer ice shells because the viscosity of ice I near its melting point is potentially small

162
enough to permit a significant amount of non-recoverable viscous deformation in the ice
shell over each orbital cycle of the satellite. The value of Im(k) will depend critically
on the rheology of the ice shell. Because the viscosity of the ice is strongly temperature-
dependent, the overall temperature structure of the ice shell could affect the value
Im(k). A thick convecting ice shell with a convective sub-layer warmed to near its
melting point could be a more dissipative state than a cold conductive ice I shell. In a
convective shell, the sub-layer of the shell could undergo appreciable viscous deformation
due to tidal flexing of the shell over a single orbital cycle, causing the total amount of
tidal dissipation could increase. In this way, the heat flux across the ice shell (Fc), which
depends on whether convection occurs or not, and the tidal heat flux (Ftidal) are linked
quantities.
Simple estimates of the rate of energy dissipation given assumed values of k and
Q can shed some light on the role that tidal dissipation might play in modifying the
behavior of the outer ice I shells of the satellites. Energy dissipation rates can be
compared to estimates of the radiogenic heating from the interiors of the satellites to
gain insight into the relative importance of tidal and radiogenic heating in their interior
evolution.
The surface heat flux from tidal dissipation is given by:
Ftidal =E
4πR2s
=21
8π
R3sGM2
Jne2
a6(6.4)
Using k ∼ 0.25 and Q ∼ 100, the surface heat flux from tidal dissipation at present
in Ganymede given its present eccentricity of 0.0015 (Murray and Dermott , 1999) is
approximately 0.15 mW m−2, a factor of 20 less than radiogenic heat fluxes at present,
and a factor of 50 less than radiogenic heat fluxes 1.5 billion years ago (see Table 4.2).
However, if Ganymede experienced a period of increased orbital eccentricity dur-
ing passage through resonances with Europa and Io, e ∼ 0.01, assuming a Q for Jupiter
of 3 × 105 (Showman and Malhotra, 1997). During this time, the surface heat flux due

163
to tidal dissipation would have been 6.75 mW m−2, comparable to the chondritic heat
flux appropriate for 1.5 billion years ago. Using values of k ∼ 0.25, Q ∼ 100, and
e ∼ 0.01 for Europa, (see Table 4.2), its surface heat flux due to tidal dissipation is
approximately 50 mW m−2, a factor of 10 larger than the present chondritic heat flux
of ∼ 5 mW m−2 (Spohn and Schubert , 2003).
If an ice shell is convecting, and tidal dissipation begins to warm its interior, it is
not known whether an equilibrium between dissipation in the ice shell and the convective
heat flux exists. If the tidal heat flux is greater than the maximum convective heat flux,
which is determined by the rheology of the ice, the ice shell will thin and convection will
cease. If the tidal heat flux is less than the convective heat flux the ice shell will thicken.
If the ice shell is thick, but conductive initially, and tidal heating may be able to trigger
convection in the shell, then the evolution of the ice shell and ocean will depend on the
existence of an equilibrium between tidal heating and the convective heat flux.
The rate of energy dissipation defined by equation (6.1) represents a global total
and does not describe how tidal dissipation actually occurs, or where it takes place
within the satellites. To effectively trigger convection in the satellites in the manner
described in Chapters 2 and 3, tidal dissipation must be capable of generating tempera-
ture perturbations on horizontal length scales ∼ λcr. If tidal dissipation is concentrated
on horizontal length scales much larger thanλcr, the critical Rayleigh number would
increase. The critical Rayleigh number for convection under the composite rheology de-
scribed in Chapter 3 is only weakly dependent on the wavelength of initial perturbation,
varying by only 5% for 1.2D < λ < 2.2D. Unfortunately, direct extrapolation of the
Racr(λ) curves from Chapter 3 to wavelengths of 2400 km (∼ 25D to ∼ 100D) can not
yield useful constraints on the critical Rayleigh number for λ ≫ λcr. By analogy with
the shape of the stability curve for an isoviscous fluid (Turcotte and Schubert , 1982), and
for a single non-Newtonian rheology calculated in Chapter 2, the slope of the stability
curve for λ ≫ λcr cannot be assumed to be the same as the slope for λ ∼ λcr. Therefore,

164
the applicability of the Racr values calculated in this thesis to tidally-triggered convec-
tion are dependent upon whether tidal dissipation can become localized on horizontal
length scales ∼ λcr.
Tidal dissipation results from the rapid tidal flexing of the inner three Galilean
satellites. In an ice shell with a laterally homogeneous viscosity structure (i.e. the
ice shell is in conductive equilibrium everywhere), the rapid deformation caused by
the tidal flexing of the ice shell is distributed on relatively long wavelengths λtidal ∼
2πREuropa/4 ∼ 2400 km (Ojakangas and Stevenson, 1989). Several methods have been
recently proposed to localize tidal dissipation in an ice shell. Each model makes a
different prediction about the distribution of tidal dissipation in the ice shell.
The landmark study of Ojakangas and Stevenson (1989) sought to determine the
equilibrium thickness of Europa’s ice shell by equating the heat flux due to tidal dissi-
pation within the ice shell to the conductive heat flux. In this model, tidal dissipation
is expressed by a volumetric dissipation rate that depends on the strain rate of the ice
shell and the Maxwell quality factor, which is explicitly evaluated as a function of the
temperature-dependent viscosity and rigidity of the ice shell. The volumetric dissipation
rate within the ice shell is:
q =2µ〈εij〉
ω
ωτM
1 + (ωτM )2(6.5)
for a Newtonian rheology, where ω = 2π/TEuropa. The time averaged tidal strain rate
(〈εij〉) is evaluated as a function of latitude and longitude at every location on Europa.
The quantity τM = η/µ is the Maxwell time, expressed by the ratio of the viscosity
of the ice to the rigidity of ice. Because the viscosity of ice is strongly temperature-
dependent, the volumetric dissipation rate is a strong function of temperature. The
ice shell is assumed to be thin compared to the radius of the satellite and to behave
as a largely elastic body over the time scale of the tidal forcing. As a result, the tidal
strain rate within the ice shell is assumed to be constant as a function of depth, so tidal

165
dissipation is localized as a function of temperature only. In a conductive ice shell, the
dissipation is therefore a function of depth, and is constant as a function of horizontal
coordinate. On Europa, the maximum dissipation occurs near the melting point of ice I
for reasonable values of melting point viscosity (∼ 1013 − 1015 Pa s) and shear modulus
(µ ∼ 1010Pa). Therefore, the layer of maximum dissipation is likely to be near the base
of the shell, where T ∼ Tm, and is not horizontally localized.
The Ojakangas and Stevenson (1989) model is 1-dimensional, so lateral heat flow
by convection and conduction and potential variations in the tidal strain rate due to
viscosity heterogeneities in the ice shell are not considered. Therefore, interactions
between the geometry of the temperature field within the ice shell and the tidal forcing
function are not considered.
Recent calculations by Tobie et al. (2003) and Showman and Han (2004) imple-
ment a heat source similar to equation (6.5) in 2D Cartesian convection simulations to
provide some intuition as to how convection and tidal dissipation might interact. The
specific form of volumetric heating rate used in these studies is:
H(T ) =Ho
η(T )ηo
+ ηo
η(T )
(6.6)
where ηo is a reference viscosity evaluated at a reference temperature To, chosen so
that τMaxwell ∼ τEuropa (Wang and Stevenson, 2000; Tobie et al., 2003; Showman and
Han, 2004; Tobie et al., 2004). In this formulation, tidal heating is concentrated as
a strong function of the 2-dimensional, heterogeneous temperature field. The extent
to which the tidal heating pattern mirrors the temperature distribution is controlled
by the activation energy in the ice flow law. Such heat sources are currently used
only in Newtonian convection models, because the form of H(T ) comes from equation
(6.5), which is based on a Newtonian rheology for ice (Ojakangas and Stevenson, 1989;
Wang and Stevenson, 2000). The value of Ho is used to scale the total amount of heat
dissipated in the ice shell, and is calculated by different methods in each study that

166
employs such a heat source. As convection begins in an ice shell with internal heating
distributed according to equation (6.6), the base of the ice shell warms to near its
melting point, and the total amount of tidal dissipation in the ice shell increases. If Ho
is small, tidal dissipation does not substantially modify the behavior of the convecting
ice shell. If Ho is large, the heat generated in the ice shell exceeds the heat transported
by convection, and the ice shell melts.
Whether equation (6.6) is applicable to tidal dissipation in an ice I shell with
a highly heterogeneous viscosity structure is not known, and is a matter of debate
in the icy satellites community. Although equation (6.6) may provide a reasonable
approximation of the behavior tidally-heated convection, some have argued that it over-
simplifies the complex interaction between tidal forcing and an ice shell with a highly
heterogeneous viscosity field (Moore, 2001). If the tidal strain rate is uniform over
horizontal spatial scales similar to the width of a convective upwelling, tidal heating
should perhaps be a function of depth only. However, if viscosity heterogeneities in the
ice shell are capable of localizing tidal strain, tidal dissipation may become localized in
low viscosity zones in the ice shell.
The volumetric dissipation defined by equation (6.6) cannot generate horizontally
localized temperature changes in a purely conductive ice shell. Because the tidal dissi-
pation is a function of temperature only, small horizontal temperature fluctuations in
the ice shell may become amplified by tidal dissipation as defined by equation (6.6). In
an initially purely conductive ice shell, equation (6.6) will deposit all tidal dissipation
in a uniform horizontal layer where T = To, likely ∼ Tm. It is impossible for tidal dis-
sipation as described by the Wang and Stevenson (2000) and models built upon their
results to generate perturbations in the ice shell with λ ∼ λcr in a purely conductive
ice shell. Instead, tidal heating described by equation (6.6) must serve only to amplify
existing temperature fluctuations in the ice shell.
Tidal dissipation could be concentrated on λ ∼ 1.75D in Europa if tidal heating

167
is concentrated along ridges. As described in Chapter 5, double ridges on Europa may
form from thermal buoyancy generated by shear heating due to rapid, cyclical strike-slip
motion driven by tidal forcing of the ice shell (Nimmo and Gaidos, 2002). Ridges are
ubiquitous on Europa, and if multiple ridges are active at a given time, a substantial
amount of energy may be dissipated in the shell as a result of ridge formation. However,
this energy is deposited at shallow depths, in the upper, brittle region of the ice shell.
It is not known whether the a heat pulse issued to the upper surface of the ice shell
could trigger convection.
The two methods of tidal dissipation discussed here, acting in concert, might
generate large temperature fluctuations that are spatially localized in the ice shell.
Small horizontal temperature fluctuations in the ice shell generated beneath ridges could
become amplified by tidal dissipation described by equation (6.6). If these two processes
occur at the same time, and the heat pulse generated near the surface of the ice shell
by shear heating can be amplified and propagated to the shell’s interior by a heat
source described by equation (6.6), the critical Rayleigh number for the ice I shells
calculated in this thesis could potentially apply to Europa. However, on other icy
satellites, this process would not work unless other geological processes could drive
temperature fluctuations which could be amplified by a heat source given by equation
(6.6) to trigger convection in the ice shell. If tidal dissipation cannot become localized
horizontally on length scales similar to λcr, the critical shell thickness for convection
may be much larger than described here. Unfortunately, uncertainties in the shape of
the stability curve for λ ≫ λcr preclude making quantative statements about how Racr
and Dcr might change.
The total amount of tidal dissipation and the localization of dissipation in the
ice shell is critically dependent on the rheology of the ice shell. Therefore, the models
described in this thesis serve as a necessary first step toward constructing geophysically
self-consistent models of tidal dissipation in the icy Galilean satellites. A logical next

168
step would include calculation of the volumetric dissipation rate in the ice shell as a
function of depth and horizontal distance, assuming that tidal dissipation occurred as
a result of viscous dissipation in the ice shells of the satellites. Such a heating function
could be incorporated in a numerical convection model to allow a solution of the tidal
heating and convection problems in a self-consistent manner.
Without further data from spacecraft, the validity of any tidal dissipation model
can only be tested by determining whether the model accurately predicts the types of
surface features that form as a result of tidal heating and potentially convection that are
inferred on the satellites. Therefore, the task of constructing tidal dissipation models
for the satellites must encompass both a viscous flow model to address the interaction
between tidal forcing and convection, and a sophisticated model of the viscoelastic
behavior of the lithosphere to model surface feature formation.
6.2.3 Premelting in Ice
The specific rheology of Goldsby and Kohlstedt (2001) was adopted for models
presented in this thesis to decrease the number of free parameters in the convection
calculations. However, the laboratory experiments and measurements of creep rates in
terrestrial glaciers suggest that creep rates in ice deforming by grain boundary sliding
and dislocation are enhanced within a few degrees of the melting point due to pre-
melting along grain boundaries (Goldsby and Kohlstedt , 2001). The alternate set of
creep parameters applicable at high temperatures (T ∼ Tm) are summarized in Table
6.1. (The activation energy for high-temperature dislocation creep is reported as 18
kJ mol−1 in Table 5 of Goldsby and Kohlstedt (2001), but should be 181 kJ mol−1,
as reported in a precursor abstract (Goldsby et al., 2001)). For consistency with the
laboratory experiments, a melting temperature of Tm = 273 K is assumed here, which
requires calculating a new value of Adiff , the pre-exponential parameter for diffusional
flow (Adiff = (42VmDo,v/RTm)). When Tm=273 K, Adiff = 3.3 × 10−10, which differs

169
Table 6.1: Rheological parameters for T∼ Tm from Goldsby and Kohlstedt (2001)
Rheology A mp Pan s−1 n p Q∗ kJ mol−1
Grain Boundary Sliding (T < 255 K) 6.2 × 10−14 1.8 1.4 49Grain Boundary Sliding (T > 255 K) 4.8 × 1015 1.8 1.4 ∼ 192
Dislocation Creep (T < 258 K) 4.0 × 10−19 4.0 0 60Dislocation Creep (T > 258 K) 6.0 × 104 4.0 0 ∼ 181
from the value used in Chapters 2 through 5 by only 5%.
Figures 6.1 and 6.2 show deformation maps for ice I with 180 < T < 273, with
grain sizes between 0.1 mm to 10 cm. In this temperature regime and range of stresses
appropriate for warm sub-layers of the ice I shells of the outer three Galilean satellites,
(10−4 MPa < σ < 10−2 MPa) the high-temperature softening terms lower the melting
point viscosity due to grain boundary sliding and dislocation creep by a factor of ∼ 10.
Accordingly, the transition stress between GBS and volume diffusion decreases by a
factor of 102 − 104 when the high-temperature creep enhancement is included in the
rheology. The large activation energies for GBS in this regime result in transition stresses
between GBS and volume diffusion that are very strongly dependent on temperature,
decreasing to 10−5 to 10−3 MPa, depending on the grain size of ice.
As a result of its decreased viscosity for T ∼ Tm, grain boundary sliding should
play an increased role in accommodating convective strain during the onset of convection
when the high-temperature softening is included in the rheology. As the grain size
increases, the role of GBS becomes more important, and when the grain size is 10 cm,
volume diffusion should play a minimal role in accommodating convective strain during
initial plume growth, and dislocation creep becomes dominant. When dislocation creep
accommodates strain during plume growth, the viscosities for ice near its melting point
will be much smaller when the high temperature creep enhancement is included.
Figure 6.3 illustrates the composite viscosity as a function of stress, with and
without high-temperature creep enhancement. A constant temperature of 265 K is

170
used, to demonstrate the behavior of the rheology near the base of the ice shell. When
the high temperature creep enhancement is included, GBS accommodates convective
strain during initial plume growth in T = 265 K ice for all grain sizes. This occurs
because the high temperature creep enhancement causes the transition stress to GBS to
decrease to values lower than the thermal stresses during the onset of convection (10−4
to 0.1 MPa). Without the high temperature creep enhancement, volume diffusion plays
a role in accommodating convective strain during initial plume growth for grain sizes
up to 3 mm.
The change in governing parameters for grain boundary sliding will likely affect
the critical wavelength for convection and the value of critical Rayleigh number in the ice
shell when grain boundary sliding accommodates strain during the onset of convection.
As discussed in section 2.4.1 and the studies by Solomatov (1995), the critical Rayleigh
number depends on the variation in viscosity with respect to temperature near the base
of the ice shell. For a single non-Newtonian rheology (cf. Solomatov, 1995):
−∂ ln η
∂T
∣∣∣∣Tm
= γ∆T =Q∗∆T
nRT 2m
(6.7)
Figure 6.4 illustrates the viscosity as a function of temperature for several different
grain sizes, with and without the high temperature creep enhancement included. The
abrupt change in the slope of η(T ) for T > 255 K is demonstrated in the left-hand
panels of Figure 6.4. When the high-temperature creep enhancement is included in the
rheology, the value of γ∆T for GBS increases by a factor of 4, but does not change when
T < 255K. For dislocation creep, γ∆T increases by a factor of 3. The physics of the
onset of convection in a basally-heated ice shell is largely controlled by the behavior of
the base of the ice shell. Therefore, a change in rheological parameters near the base of
the ice shell will likely change the critical wavelength and critical Rayleigh number.
The vast majority of scaling laws between λcr, Racr, and γ∆T in the terrestrial
and icy satellite literature are generated using a single rheology for the material in the

171
-4
-2
0
2lo
g 10
σ (M
Pa)
180 200 220 240 260
-4
-2
0
2lo
g 10
σ (M
Pa)
180 200 220 240 260
-4
-2
0
2lo
g 10
σ (M
Pa)
180 200 220 240 260
-4
-2
0
2lo
g 10
σ (M
Pa)
180 200 220 240 260
-4
-2
0
2lo
g 10
σ (M
Pa)
180 200 220 240 260
Disl
GBS
Diff
d=1 mm
180 200 220 240 260180 200 220 240 260180 200 220 240 260
Disl
GBS
Diff
d=1 mm
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
Disl
GBS
Diff
d=0.1 mm
180 200 220 240 260T (K)
180 200 220 240 260T (K)
Disl
GBS
Diff
d=0.1 mm
Figure 6.1: (top panels) Deformation maps for ice I with grain size of 1 mm, and(bottom panels), 0.1 mm. (left panels) Deformation maps with high temperature creepenhancement included. (right panels) Deformation maps without high temperaturecreep enhancement. When the creep enhancement is included in the rheology, grainboundary sliding should play a larger role in accommodating convective strain in warmice near the base of the ice shell (T > 250 K) during initial plume growth.

172
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260
Disl
GBS
d=10 cm
180 200 220 240 260180 200 220 240 260180 200 220 240 260180 200 220 240 260
Disl
GBS
d=10 cm
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
-4
-2
0
2
log 1
0 σ
(MP
a)
180 200 220 240 260T (K)
Disl
GBS
Diff
d=1 cm
180 200 220 240 260T (K)
180 200 220 240 260T (K)
180 200 220 240 260T (K)
180 200 220 240 260T (K)
Disl
GBS
Diff
d=1 cm
Figure 6.2: Same as Figure 6.1, with (top panels) grain sizes of 10 cm and (bottompanels) 1 cm.

173
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=10 cm d=10 cm
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=1 cm d=1 cm
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=1 mm d=1 mm
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
5
10
15
20
25
log 1
0 η
(Pa
s)
-4 -2 0 2
log10 σ (MPa)
d=0.1 mm
-4 -2 0 2
log10 σ (MPa)
-4 -2 0 2
log10 σ (MPa)
-4 -2 0 2
log10 σ (MPa)
-4 -2 0 2
log10 σ (MPa)
-4 -2 0 2
log10 σ (MPa)
-4 -2 0 2
log10 σ (MPa)
d=0.1 mm
Figure 6.3: Left panels: Composite Newtonian and non-Newtonian viscosity for ice I asa function of stress for grain sizes of 10 cm (top), 1 cm, 1 mm and 0.1 mm (bottom)with high temperature creep enhancement included. Green lines show the viscosityfor diffusional flow alone, blue shows grain boundary sliding, red shows basal slip, andorange shows dislocation creep. The full composite rheology is shown in the bold blackline, which follows a single constituent mechanism. Right panels: Composite viscosityfor ice I as a function of stress for grain sizes of 10 cm - 0.1 mm without the hightemperature creep enhancement included. A constant temperature of 265 K and meltingtemperature of Tm = 273 K is used.

174
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=10 cm d=10 cm
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=1 cm d=1 cm
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
5
10
15
20
25
log 1
0 η
(Pa
s)
d=1 mm d=1 mm
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
5
10
15
20
25
log 1
0 η
(Pa
s)
180 200 220 240 260
T(K)
d=0.1 mm
180 200 220 240 260
T (K)
180 200 220 240 260
T (K)
180 200 220 240 260
T (K)
180 200 220 240 260
T (K)
180 200 220 240 260
T (K)
180 200 220 240 260
T (K)
d=0.1 mm
Figure 6.4: (left panels) Composite Newtonian and non-Newtonian viscosity for ice Ias a function of temperature for grain sizes of 10 cm (top), 1 cm, 1 mm and 0.1 mm(bottom) with high temperature creep enhancement included. Green lines show theviscosity for diffusional flow alone, blue shows grain boundary sliding, red shows basalslip, and orange shows dislocation creep. The full composite rheology is shown in thebold black line, which follows a single constituent mechanism. (right panels) Compositeviscosity for ice I as a function of temperature for grain sizes of 10 cm - 0.1 mm withoutthe high temperature creep enhancement included. A constant stress of 0.05 MPa andmelting temperature of Tm = 273 K is used.
175
convecting layer, and a single activation energy (which controls γ∆T ) for material in
all parts of the domain. As discussed in Chapter (3), the behavior of the ice shell with
a composite rheology is different from the behavior of the ice shell with a single non-
Newtonian rheology. For example, Racr is a strong function of wavelength when a single
non-Newtonian term is used, whereas Racr is a weak function of wavelength when the
composite rheology is used.
Therefore, use of existing scaling laws to predict the behavior of the ice shell as
γ∆T changes may not be appropriate. However, some qualitative insight into how the
behavior of the ice shell near the onset of convection might change due to inclusion of
high temperature creep enhancement can be gained by assuming that the rheology of
the ice shell near its base will be governed solely by either GBS or dislocation creep.
Based on the results of Chapter 3, it is clear that this is not strictly valid, since the
behavior of the shell did not transition to purely Newtonian when the grain size was 0.1
mm, or purely n = 4 dislocation creep behavior when the grain size was increased to 10
cm.
In well-developed convection, large values of γ∆T lead to the development of
a thick stagnant lid of immobile fluid near its cold surface. The resulting convection
pattern beneath the stagnant lid has an aspect ratio of approximately (D−δL×D−δL),
where δL is the thickness of the stagnant lid, which is proportional to γ∆T (Solomatov ,
1995). From the viewpoint of a growing convective plume, the effective thickness of the
fluid layer is decreased, because the top portion of the layer is too stiff to participate
in convection. Although this line of reasoning holds for well-developed convection,
the behavior of the ice shell is likely similar during the onset of convection, when initial
plume growth is retarded by thermal diffusion and the high viscosity of overlaying colder
fluid. As a result, the critical wavelength for convection will be inversely proportional
to γ∆T , and should decrease when the high-temperature creep enhancement terms are
included, and GBS or dislocation creep accommodate convective strain. Because grain

176
boundary sliding will play an increased role in accommodating the strain from initial
plume growth when the creep enhancement is considered, it is likely that the critical
wavelength will decrease for all values of grain size, except possibly 0.1 mm, where
volume diffusion might accommodate convective strain at extremely low stresses.
The value of critical Rayleigh number will also change if the high temperature
creep enhancement terms are included in the rheology. Based on the analysis in Chapter
2 and the scaling laws of Solomatov (1995), the critical Rayleigh number for convection
in non-Newtonian ice is a strong function of γ∆T . If grain boundary sliding or disloca-
tion creep play an increased role in accommodating deformation during plume growth,
the increase in γ∆T near the base of the ice shell could cause the critical Rayleigh
number to increase. However, rheological parameters for high-temperature creep en-
hancement yield low viscosities due to GBS and dislocation creep near the base of the
ice shell, which would cause the critical Rayleigh number to decrease. The net change
in critical Rayleigh number will depend on the balance between these two competing
effects.
If the value of critical Rayleigh number changes, the value of critical shell thickness
for convection will also change. The reference viscosity used to evaluate Dcr for the
composite rheology in Chapter 3 is defined by volume diffusion, and will not be affected
by the inclusion of high-temperature creep enhancement in the rheology. Therefore, Dcr
can be changed only by a change in the critical Rayleigh number, and will be affected
by the change in γ∆T .
Additional numerical simulations are required to clarify how the change in rheo-
logical parameters near the base of the ice shell due to inclusion of the high temperature
creep enhancement might change λcr and Racr. Specifically, the calculations of Chapter
3 should be repeated with high temperature creep enhancement included, as soon as
the governing rheological parameters are verified by further laboratory experiments. To
provide a complete description of the onset of convection in tidally flexed icy satellites,

177
the dissipation function appropriate for the ice shell should be included in such a model,
to address the role of tidal dissipation in triggering convection.
6.3 Synthesis
The icy Galilean satellites Europa, Ganymede, and Callisto are as geophysically
complex as the terrestrial planets, but the level of sophistication of convection modeling
efforts for icy satellites has only recently begun to approach the level of sophistication
of terrestrial models. The geophysical setting of the icy satellites is quite different from
a terrestrial planet. Unlike terrestrial planets, icy satellites receive additional heat from
tidal dissipation late in their evolutionary histories. Icy satellites also differ from the
terrestrial planets because the behavior of their deep interiors is likely decoupled from
the behavior of the surface by a layer of liquid water. Uncertainty in the rheology of the
materials, the composition of the satellites, and their interior structures has hampered
efforts to judge whether the satellites convect, and if they do convect, what conditions
lead to convective-driven resurfacing.
Laboratory experiments by Goldsby and Kohlstedt (2001) suggest that ice I ex-
hibits a complex rheology at temperature and stress conditions appropriate for the outer
ice I shells of the icy Galilean satellites. The results presented in this thesis suggest that
if a non-Newtonian or composite Newtonian and non-Newtonian rheology is used in
models of the outer ice I shells, a finite-amplitude temperature anomaly is required to
trigger convection in an initially conductive shell. Under the composite rheology, the
melting point viscosity and the viscosities in the convecting sub-layer depend heavily on
the grain size of ice, which determine the deformation mechanisms that accommodate
convective strain in the ice shell. When convection occurs, it is sluggish, and the rela-
tive efficiency of convective heat transport over conduction alone depends heavily on the
grain size of ice. Thus, the efficiency of mass transport by convection and the thickness
of the stagnant lid are also grain size-dependent. The requirement of a finite-amplitude

178
perturbation to soften the ice to trigger convection, coupled with the requirement of
endogenic resurfacing events to breach the stagnant lid, suggest that tidal dissipation,
tidal flexing of the ice shell, and compositional buoyancy may be required to permit
communication between the surfaces and oceans of icy satellites.

Bibliography
Anderson, J. D., E. L. Lau, W. L. Sjogren, G. Schubert, and W. B. Moore (1996),Gravitational constraints on the internal structure of Ganymede, Nature, 384, 541–543.
Anderson, J. D., G. Schubert, R. A. Jacobson, E. L. Lau, W. B. Moore, and W. L. Sjo-gren (1998), Europa’s Differentiated Internal Structure: Inferences from Four GalileoEncounters, Science, 281, 2019–2022.
Anderson, J. D., R. A. Jacobson, T. P. McElrath, W. B. Moore, G. Schubert, andP. C. Thomas (2001), Shape, Mean Radius, Gravity Field, and Interior Structure ofCallisto, Icarus, 153, 157–161.
Barr, A. C., and R. T. Pappalardo (2003), Numerical Simulations of Non-NewtonianConvection in Ice: Application to Europa, in Lunar and Planetary Institute Confer-ence Abstracts, p. 1477.
Barr, A. C., R. T. Pappalardo, and D. J. Stevenson (2001), Rise of Deep Melt intoGanymede’s Ocean and Implications for Astrobiology, in Lunar and Planetary Insti-tute Conference Abstracts, p. 1781.
Barr, A. C., F. Nimmo, R. T. Pappalardo, and E. Gaidos (2002), Rise of Deep Meltinto Ganymede’s Ocean and Implications for Astrobiology, in Lunar and PlanetaryInstitute Conference Abstracts, p. 1545.
Barr, A. C., R. T. Pappalardo, and S. Zhong (2004), Convective Instability in Ice I withNon-Newtonian Rheology: Application to the Icy Galilean Satellites, J. Geophys.Res., in press, doi:10.1029/2004JE002296.
Brooks, A. N. (1981), A Petrov-Galerkin Finite Element Formulation for ConvectionDominated Flows, Ph.D. Thesis.
Carlson, R. W., R. E. Johnson, and M. S. Anderson (1999), Sulfuric Acid on Europaand the Radiolytic Sulfur Cycle, Science, 286, 97–99.
Carlson, R. W., et al. (1999), Hydrogen peroxide on the surface of Europa, Science,283, 2062–2064.
Chandrasekhar, S. (1961), Hydrodynamic and hydromagnetic stability, International Se-ries of Monographs on Physics, Oxford: Clarendon.

180
Christensen, U. (1985), Heat transport by variable viscosity convection II: pressure in-fluence, non-Newtonian rheology and decaying heat sources, Earth Planet. Sci. Lett.,37, 183–205.
Chyba, C. F., and K. Hand (2001), Life Without Photosynthesis, Science, 292, 2026–2027.
Chyba, C. F., and C. B. Phillips (2002), Europa as an Abode of Life, Origins of Lifeand Evolution of the Biosphere, 32, 47–67.
Collins, G. C., J. W. Head, R. T. Pappalardo, and N. A. Spaun (2000), Evaluationof models for the formation of chaotic terrain on Europa, J. Geophys. Res., 105,1709–1716.
Cooper, J. F., R. E. Johnson, B. H. Mauk, H. B. Garrett, and N. Gehrels (2001),Energetic Ion and Electron Irradiation of the Icy Galilean Satellites, Icarus, 149,133–159.
Davaille, A., and C. Jaupart (1994), Onset of thermal convection in fluids withtemperature-dependent viscosity: Application to the oceanic mantle, J. Geophys.Res., 99, 19,853–19,866.
De Bresser, J. H. P., C. J. Peach, J. P. J. Reijs, and C. J. Spiers (1998), On dynamicrecrystallization during solid state flow: Effects of stress and temperature, Geophys.Res. Lett., 25, 3457–3460.
De La Chapelle, S., O. Castelnau, V. Lipenkov, and P. Duval (1998), Dynamic recrys-tallization and texture development in ice as revealed by the study of deep ice coresin Antarctica and Greenland, J. Geophys. Res., 103, 5091–5106.
Dermott, S. F., R. Malhotra, and C. D. Murray (1988), Dynamics of the Uranian andSaturnian satellite systems - A chaotic route to melting Miranda?, Icarus, 76, 295–334.
Durham, W. B., and L. A. Stern (2001), Rheological Properties of Water Ice – Appli-cations to Satellites of the Outer Planets, Ann. Rev. Earth Planet Sci., 29, 295–330.
Durham, W. B., S. H. Kirby, and L. A. Stern (1997), Creep of water ices at planetaryconditions: A compilation, J. Geophys. Res., 102, 16,293–16,302.
Goldreich, P., N. Murray, P. Y. Longaretti, and D. Banfield (1989), Neptune’s story,Science, 245, 500–504.
Goldsby, D. L., and D. L. Kohlstedt (2001), Superplastic deformation of ice: Experi-mental observations, J. Geophys. Res., 106, 11,017–11,030.
Goldsby, D. L., D. L. Kohlstedt, and R. Pappalardo (2001), A Composite Flow Law forWater Ice for Use in Modelling of Glaciers, Polar Caps, and Icy Planetary Interiors,in Lunar and Planetary Institute Conference Abstracts, p. 2067.
Goodman, D. J., H. J. Frost, and M. F. Ashby (1981), The plasticity of polycrystallineice, Philos. Mag. A, 43, 665–695.

181
Goodman, J. C., G. C. Collins, J. Marshall, and R. T. Pierrehumbert (2004), Hydrother-mal plume dynamics on Europa: Implications for chaos formation, J. Geophys. Res.,109, E03008, doi:10.1029/2003JE002073.
Greeley, R., et al. (1998), Europa: Initial Galileo Geological Observations, Icarus, 135,4–24.
Greeley, R., et al. (2000), Geologic mapping of Europa, J. Geophys. Res., 105, 22,559–22,578.
Greenberg, R., G. V. Hoppa, B. R. Tufts, P. Geissler, J. Riley, and S. Kadel (1999),Chaos on Europa, Icarus, 141, 263–286.
Head, J. W., and R. T. Pappalardo (1999), Brine mobilization during lithospheric heat-ing on Europa: Implications for formation of chaos terrain, lenticula texture, andcolor variations, J. Geophys. Res., 104, 27,143–27,155.
Hoppa, G. V., B. R. Tufts, R. Greenberg, and P. E. Geissler (1999), Formation ofcycloidal features on Europa, Icarus, 141, 287–298.
Hughes, T. J. R. (1987), The Finite Element Method: Linear Static and Dynamic FiniteElement Analysis, Dover, Mineola, New York.
Hussmann, H., and T. Spohn (2004), Europa’s Ice Shell Thickness Derived fromThermal-Orbital Evolution Models, in Workshop on Europa’s Icy Shell: Past,Present, and Future, p. 7012.
Jakosky, B. M., and E. L. Shock (1998), The biological potential of Mars, the earlyEarth, and Europa, J. Geophys. Res., 103, 19,359–19,364.
Karato, S., S. Zhang, and H.-R. Wenk (1995), Superplasticity in Earth’s Lower Mantle:Evidence from Seismic Anisotropy and Rock Physics, Science, 270, 458–461.
Kargel, J. S., J. Z. Kaye, J. W. Head, G. M. Marion, R. Sassen, J. K. Crowley, O. P.Ballesteros, S. A. Grant, and D. L. Hogenboom (2000), Europa’s Crust and Ocean:Origin, Composition, and the Prospects for Life, Icarus, 148, 226–265.
Kirk, R. L., and D. J. Stevenson (1987), Thermal evolution of a differentiated Ganymedeand implications for surface features, Icarus, 69, 91–134.
Kivelson, M. G., K. K. Khurana, and M. Volwerk (2002), The Permanent and InductiveMagnetic Moments of Ganymede, Icarus, 157, 507–522.
Korenaga, J., and T. H. Jordan (2003), Physics of multiscale convection in Earth’smantle: Onset of sublithospheric convection, J. Geophys. Res., 108, 2333, doi:10.1029/2002JB001760.
Kundu, P. K. (1990), Fluid Mechanics, Academic Press, New York.
Malevsky, A. V., and D. A. Yuen (1992), Strongly Chaotic Non-Newtonian MantleConvection, Geophys. Astrophys. Fluid Dynamics, 65, 149–171.

182
Matsuoka, K., T. Furukawa, S. Fujita, H. Maeno, S. Uratsuka, R. Naruse, and O. Watan-abe (2003), Crystal orientation fabrics within the Antarctic ice sheet revealed by amultipolarization plane and dual-frequency radar survey, J. Geophys. Res., 108, 2499,doi:10.1029/2003JB002425.
McCollom, T. M. (1999), Methanogenesis as a potential source of chemical energy forprimary biomass production by autotrophic organisms in hydrothermal systems onEuropa, J. Geophys. Res., 104, 30,729–30,742.
McCord, T. B., et al. (1999), Hydrated salt minerals on Europa’s surface from theGalileo near-infrared mapping spectrometer (NIMS) investigation, J. Geophys. Res.,104, 11,827–11,852.
McKinnon, W. (1998), Geodynamics of Icy Satellites, in ASSL Vol. 227: Solar SystemIces, pp. 525–550.
McKinnon, W. B. (1999), Convective instability in Europa’s floating ice shell, Geophys.Res. Lett., 26, 951–954.
McNamara, A. K., P. E. van Keken, and S. Karato (2003), Development of finite strainin the convecting lower mantle and its implications for seismic anisotropy, J. Geophys.Res., 108, 2230, doi:10.1029/2002JB001970.
Molnar, P., G. A. Houseman, and C. P. Conrad (1998), Rayleigh-Taylor instabilityand convective thinning of mechanically thickened lithosphere: effects of non-linearviscosity decreasing exponentially with depth and of horizontal shortening of the layer,Geophys. J. Int, 133, 568–584.
Moore, J. M., et al. (2004), Callisto, in Jupiter: The Planet, Satellites & Magnetosphere,pp. 397–426, Cambridge University Press, New York.
Moore, W. B. (2001), Coupling Tidal Dissipation and Convection, AAS/Division forPlanetary Sciences Meeting, 33, 0.
Moore, W. B., and G. Schubert (2000), NOTE: The Tidal Response of Europa, Icarus,147, 317–319.
Moresi, L., and M. Gurnis (1996), Constraints on the lateral strength of slabs fromthree-dimensional dynamic flow models, Earth Planet. Sci. Lett., 138, 15–28.
Moresi, L.-N., and V. S. Solomatov (1995), Numerical investigation of 2D convectionwith extremely large viscosity variations, Physics of Fluids, 7, 2154–2162.
Murray, C. D., and S. F. Dermott (1999), Solar System Dynamics, Cambridge Univer-sity Press, New York.
Nimmo, F., and E. Gaidos (2002), Strike-slip motion and double ridge formation onEuropa, J. Geophys. Res., 107, 5021, doi:10.1029/2000JE001476.
Nimmo, F., and M. Manga (2002), Causes, characteristics, and consequences of convec-tive diapirism on Europa, Geophys. Res. Lett., 29, 2109, doi:10.1029/2002GL015754.

183
Nimmo, F., B. Giese, and R. T. Pappalardo (2003), Estimates of Europa’s ice shellthickness from elastically-supported topography, Geophys. Res. Lett., 30, 1223, doi:10.1029/2002GL016660.
O’Brien, D. P., P. Geissler, and R. Greenberg (2002), A Melt-through Model for ChaosFormation on Europa, Icarus, 156, 152–161.
Ojakangas, G. W., and D. J. Stevenson (1989), Thermal state of an ice shell on Europa,Icarus, 81, 220–241.
Ozoe, H., and S. W. Churchill (1972), Hydrodynamic Stability and Natural Convectionin Ostwald-de Waele and Ellis Fluids: The Development of a Numerical Solution,American Institute of Chemical Engineers Journal, 18, 1196–1206.
Pappalardo, R. T., and A. C. Barr (2004), The origin of domes on Europa: The roleof thermally induced compositional diapirism, Geophys. Res. Lett., 31, L01701, doi:10.1029/2003GL019202.
Pappalardo, R. T., et al. (1998), Geological evidence for solid-state convection in Eu-ropa’s ice shell, Nature, 391, 365–368.
Pappalardo, R. T., et al. (1999), Does Europa have a subsurface ocean? Evaluation ofthe geological evidence, J. Geophys. Res., 104, 24,015–24,056.
Peale, S. J., and P. Cassen (1978), Contribution of tidal dissipation to lunar thermalhistory, Icarus, 36, 245–269.
Peale, S. J., P. Cassen, and R. T. Reynolds (1979), Melting of Io by tidal dissipation,Science, 203, 892–894.
Peltier, W. R., D. L. Goldsby, D. L. Kohlstedt, and L. Tarasov (2000), Ice-age ice-sheetrheology: constraints from the Last Glacial Maximum form of the Laurentide icesheet, Annals of Glaciology, vol.30, pp.163-176, 30, 163–176.
Pierazzo, E., and C. F. Chyba (2002), Cometary Delivery of Biogenic Elements toEuropa, Icarus, 157, 120–127.
Ramage, A., and A. J. Wathen (1994), Iterative solution techniques for the Stokes andNavier-Stokes equations, Int. J. Numer. Methods Fluids, 19, 67–83.
Ranalli, G. (1987), Rheology of The Earth: deformation and flow processes in geophysicsand geodynamics, Allen & Unwin, Boston.
Reynolds, R. T., and P. M. Cassen (1979), On the internal structure of the majorsatellites of the outer planets, Geophys. Res. Lett., 6, 121–124.
Ruiz, J. (2001), The stability against freezing of an internal liquid-water ocean in Cal-listo, Nature, 412, 409–411.
Schenk, P. M., and R. T. Pappalardo (2004), Topographic variations in chaos onEuropa: Implications for diapiric formation, Geophys. Res. Lett., 31, L16703, doi:10.1029/2004GL019978.

184
Schmidt, K. G., and D. Dahl-Jensen (2004), An Ice Crystal Model for Jupiter’s MoonEuropa, Ann. Glaciology, 37, submitted.
Schubert, G., D. L. Turcotte, and P. Olson (2001), Mantle Convection in the Earth andPlanets, Cambridge University Press, New York.
Segatz, M., T. Spohn, M. N. Ross, and G. Schubert (1988), Tidal dissipation, surfaceheat flow, and figure of viscoelastic models of Io, Icarus, 75, 187–206.
Shoemaker, E. M., B. K. Lucchitta, D. E. Wilhelms, J. B. Plescia, and S. W. Squyres(1982), The geology of Ganymede, in Satellites of Jupiter, pp. 435–520, University ofArizona Press, Tucson.
Showman, A. P., and L. Han (2004), Numerical Simulations of Convection in Eu-ropa’s Ice Shell: Implications for Surface Features, J. Geophys. Res., E01010, doi:10.1029/2003JE002103.
Showman, A. P., and R. Malhotra (1997), Tidal Evolution into the Laplace Resonanceand the Resurfacing of Ganymede, Icarus, 127, 93–111.
Solomatov, V. S. (1995), Scaling of temperature- and stress-dependent viscosity convec-tion, Physics of Fluids, 7, 266–274.
Solomatov, V. S., and L.-N. Moresi (2000), Scaling of time-dependent stagnant lid con-vection: Application to small-scale convection on Earth and other terrestrial planets,J. Geophys. Res., 105, 21,795–21,818.
Spaun, N. A. (2001), Chaos, Lenticulae, and Lineae on Europa, Ph.D Thesis, BrownUniversity.
Spohn, T., and G. Schubert (2003), Oceans in the icy Galilean satellites of Jupiter?,Icarus, 161, 456–467.
Tien, C., H. S. Tsuei, and Z. S. Sun (1969), Thermal Instability of a Horizontal Layerof non-Newtonian Fluid Heated From Below, International Journal of Heat and MassTransfer, 12, 1173–1178.
Tobie, G., G. Choblet, and C. Sotin (2003), Tidally heated convection: Constraints onEuropa’s ice shell thickness, J. Geophys. Res., 108, 5124, doi:10.1029/2003JE002099.
Tobie, G., G. Choblet, J. Lunine, and C. Sotin (2004), Interaction Between the Con-vective Sublayer and the Cold Fractured Surface of Europa’s Ice Shell, in Workshopon Europa’s Icy Shell: Past, Present, and Future, p. 7033.
Turcotte, D. L., and G. Schubert (1982), Geodynamics: Applications of ContinuumPhysics to Geological Problems, John Wiley & Sons, New York.
van den Berg, A. P., P. E. van Keken, and D. A. Yuen (1993), The Effects of a CompositeNon-Newtonian and Newtonian Rheology on Mantle Convection, Geophys. J. Int.,115, 62–78.

185
van den Berg, D. A., P. E. Yuen, and P. E. van Keken (1995), Rheological transitionin mantle convection with a composite temperature-dependent, non-Newtonian andNewtonian rheology, Earth Planet. Sci. Lett., 129, 249–260.
Wang, H., and D. J. Stevenson (2000), Convection and Internal Melting of Europa’s IceShell, in Lunar and Planetary Institute Conference Abstracts, p. 1293.
Wilson, L., and J. W. Head (2001), Lava fountains from the 1999 Tvashtar Catena fissureeruption on Io: Implications for dike emplacement mechanisms, eruption rates, andcrustal structure, J. Geophys. Res., 106 (12), 32,997–33,004.
Zahnle, K., L. Dones, and H. F. Levison (1998), Cratering Rates on the Galilean Satel-lites, Icarus, 136, 202–222.
Zahnle, K. J. (2001), Cratering Rates on Europa, in Lunar and Planetary InstituteConference Abstracts, p. 1699.
Zhong, S., and M. Gurnis (1993), Dynamic Feedback Between a Continentlike Raft andThermal Convection, J. Geophys. Res., 98, 12,219–12,232.
Zhong, S. M., M. Gurnis, and L. Moresi (1998), Role of faults, nonlinear rheology, andviscosity structure in generating plates from instantaneous mantle flow models, J.Geophys. Res., 103, 15,255–15,268.
Zhong, S. M., M. T. Zuber, L. Moresi, and M. Gurnis (2000), Role of temperature-dependent viscosity and surface plates in spherical models of mantle convection, J.Geophys. Res., 105, 11,063–11,082.
Zimmer, C., K. K. Khurana, and M. G. Kivelson (2000), Subsurface Oceans on Europaand Callisto: Constraints from Galileo Magnetometer Observations, Icarus, 147, 329–347.
Zolotov, M. Y., and E. L. Shock (2004), A model for low-temperature biogeochem-istry of sulfur, carbon, and iron on Europa, J. Geophys. Res., 109, E06003, doi:10.1029/2003JE002194.

Appendix A
Thermal, Physical, and Rheological Parameters

187
Table A.1: Thermal and Physical Parameters
Parameter Symbol Value
Density of Ice ρ 930 kg m−3
Acceleration of Gravity gEuropa 1.3 m s−2
Ganymede 1.42 m s−2
Callisto 1.24 m s−2
Coefficient of Thermal Expansion α 10−4 K−1
Surface Temperature Ts 90 - 120 KMelting Temperature Tm 250 - 270 KThermal Diffusivity κ 10−6 m s−2
Gas Constant R 8.314 J mol−1 K−1

188
Table A.2: Rheological Parameters, after Goldsby and Kohlstedt (2001). † for Tm = 260K.
Rheology A (mp Pa−n s−1) n p Q∗ (kJ mol−1)
Volume Diffusion 3.5 × 10−10 † 1 2 59.4Basal Slip 2.2 × 10−7 2.4 0 60Grain Boundary Sliding 6.2 × 10−14 1.8 1.4 49Dislocation Creep 4.0 × 10−19 4.0 0 60

Appendix B
Selected Input Parameters

190
Table B.1: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with GBS rheology (Chapter2).
Run Name Ra1 δT/∆T k n Ts Tm E
l1016 5.90 × 104 0.05 1.667 1.8 110 260 21.83l1030 5.60 × 104 0.05 1.429 1.8 110 260 21.83l1046 5.60 × 104 0.05 1.25 1.8 110 260 21.83l1065 5.80 × 104 0.05 1.111 1.8 110 260 21.83l1085 6.20 × 104 0.05 1 1.8 110 260 21.83l1144 9.60 × 104 0.05 0.667 1.8 110 260 21.83l1104 8.10 × 104 0.05 0.8 1.8 110 260 21.83l1127 8.80 × 104 0.05 0.727 1.8 110 260 21.83l1162 5.50 × 104 0.05 1.379 1.8 110 260 21.83l1173 5.50 × 104 0.05 1.333 1.8 110 260 21.83l1184 5.50 × 104 0.05 1.365 1.8 110 260 21.83l1202 1.60 × 105 0.005 1.365 1.8 110 260 21.83l1207 1.20 × 105 0.01 1.365 1.8 110 260 21.83l1214 7.70 × 104 0.025 1.365 1.8 110 260 21.83l1220 5.50 × 104 0.05 1.365 1.8 110 260 21.83l1225 4.60 × 104 0.075 1.365 1.8 110 260 21.83l1231 4.00 × 104 0.1 1.365 1.8 110 260 21.83l1301 2.00 × 105 0.005 1.365 1.8 100 260 20.46l1312 1.50 × 105 0.01 1.365 1.8 100 260 20.46l1328 9.30 × 104 0.025 1.365 1.8 100 260 20.46l1339 6.70 × 104 0.05 1.365 1.8 100 260 20.46l1349 5.50 × 104 0.075 1.365 1.8 100 260 20.46l1361 4.70 × 104 0.1 1.365 1.8 100 260 20.46l1403 1.60 × 105 0.005 1.365 1.8 110 270 20.46l1413 1.20 × 105 0.01 1.365 1.8 110 270 20.46l1426 7.60 × 104 0.025 1.365 1.8 110 270 20.46

191
Table B.2: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with GBS rheology (continued).
Run Name Ra1 δT/∆T k n Ts Tm E
l1436 5.50 × 104 0.05 1.365 1.8 110 270 20.46l1447 4.50 × 104 0.075 1.365 1.8 110 270 20.46l1458 3.90 × 104 0.1 1.365 1.8 110 270 20.46l1502 2.40 × 105 0.005 1.365 1.8 90 260 19.26l1514 1.80 × 105 0.01 1.365 1.8 90 260 19.26l1522 1.20 × 105 0.025 1.365 1.8 90 260 19.26l1534 7.97 × 104 0.05 1.365 1.8 90 260 19.26l1552 6.50 × 104 0.075 1.365 1.8 90 260 19.26l1561 5.60 × 104 0.1 1.365 1.8 90 260 19.26l1607 1.30 × 105 0.005 1.365 1.8 120 260 23.39l1616 1.00 × 105 0.01 1.365 1.8 120 260 23.39l1630 6.20 × 104 0.025 1.365 1.8 120 260 23.39l1633 4.50 × 104 0.05 1.365 1.8 120 260 23.39l1644 3.70 × 104 0.075 1.365 1.8 120 260 23.39l1656 3.30 × 104 0.1 1.365 1.8 120 260 23.39l1656 3.30 × 104 0.1 1.365 1.8 120 260 23.39l2434 3.10 × 104 0.35 1 1.8 90 260 19.26l2440 2.70 × 104 0.35 1 1.8 100 260 20.46l2442 2.20 × 104 0.35 1 1.8 110 260 21.83l2450 1.90 × 104 0.35 1 1.8 120 260 23.39

192
Table B.3: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with basal slip rheology (Chapter2).
Run Name Ra1 δT/∆T k n Ts Tm E
l1703 3.20 × 104 0.05 1.667 2.4 110 260 20.05l1715 3.10 × 104 0.05 1.429 2.4 110 260 20.05l1726 3.10 × 104 0.05 1.25 2.4 110 260 20.05l1735 3.30 × 104 0.05 1.111 2.4 110 260 20.05l1748 3.60 × 104 0.05 1 2.4 110 260 20.05l1759 4.70 × 104 0.05 0.8 2.4 110 260 20.05l1770 5.80 × 104 0.05 0.667 2.4 110 260 20.05l1781 3.10 × 104 0.05 1.333 2.4 110 260 20.05l1789 3.10 × 104 0.05 1.379 2.4 110 260 20.05l1795 3.10 × 104 0.05 1.29 2.4 110 260 20.05l1801 1.20 × 105 0.005 1.333 2.4 110 260 20.05l1808 8.00 × 104 0.01 1.333 2.4 110 260 20.05l1814 4.60 × 104 0.025 1.333 2.4 110 260 20.05l1819 2.40 × 104 0.075 1.333 2.4 110 260 20.05l1826 2.00 × 104 0.1 1.333 2.4 110 260 20.05l1842 1.80 × 105 0.005 1.333 2.4 90 260 17.69l1847 1.20 × 105 0.01 1.333 2.4 90 260 17.69l1855 6.60 × 104 0.025 1.333 2.4 90 260 17.69l1858 4.30 × 104 0.05 1.333 2.4 90 260 17.69l1865 3.30 × 104 0.075 1.333 2.4 90 260 17.69l1872 2.80 × 104 0.1 1.333 2.4 90 260 17.69l1903 1.50 × 105 0.005 1.333 2.4 100 260 18.79l1913 1.00 × 105 0.01 1.333 2.4 100 260 18.79

193
Table B.4: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with basal slip rheology (con-tinued).
Run Name Ra1 δT/∆T k n Ts Tm E
l1925 5.60 × 104 0.025 1.333 2.4 100 260 18.79l1939 3.70 × 104 0.05 1.333 2.4 100 260 18.79l1950 2.80 × 104 0.075 1.333 2.4 100 260 18.79l1961 2.40 × 104 0.1 1.333 2.4 100 260 18.79l2002 1.00 × 105 0.005 1.333 2.4 120 260 21.48l2015 6.60 × 104 0.01 1.333 2.4 120 260 21.48l2030 3.80 × 104 0.025 1.333 2.4 120 260 21.48l2038 2.60 × 104 0.05 1.333 2.4 120 260 21.48l2048 2.00 × 104 0.075 1.333 2.4 120 260 21.48l2058 1.70 × 104 0.1 1.333 2.4 120 260 21.48l2101 1.20 × 105 0.005 1.333 2.4 110 250 21.48l2108 8.00 × 104 0.01 1.333 2.4 110 250 21.48l2113 4.70 × 104 0.025 1.333 2.4 110 250 21.48l2122 3.10 × 104 0.05 1.333 2.4 110 250 21.48l2125 2.40 × 104 0.075 1.333 2.4 110 250 21.48l2134 2.00 × 104 0.1 1.333 2.4 110 250 21.48l2403 9.80 × 103 0.35 1 2.4 110 260 20.05l2407 1.40 × 104 0.35 1 2.4 90 260 17.69l2414 1.20 × 104 0.35 1 2.4 100 260 18.79l2418 8.30 × 103 0.35 1 2.4 120 260 21.48

194
Table B.5: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with composite rheology (Chap-ter 3).
Run Name Rao δT/∆T k d (m)
gk2053 7.32 × 103 0.02 1.143 2 × 10−2
gk2057 7.16 × 103 0.025 1.143 2 × 10−2
gk2063 6.82 × 103 0.035 1.143 2 × 10−2
gk2027 6.30 × 103 0.05 1.143 2 × 10−2
gk2072 5.57 × 103 0.075 1.143 2 × 10−2
gk2078 5.01 × 103 0.1 1.143 2 × 10−2
gk1943 3.17 × 102 0.02 1.143 3 × 10−2
gk1951 3.11 × 102 0.025 1.143 3 × 10−2
gk1954 2.97 × 102 0.035 1.143 3 × 10−2
gk1931 2.74 × 102 0.05 1.143 3 × 10−2
gk1960 2.42 × 102 0.075 1.143 3 × 10−2
gk1966 2.17 × 102 0.1 1.143 3 × 10−2
gk1824 2.08 × 10−2 0.025 1.143 10−1
gk1836 1.82 × 10−2 0.05 1.143 10−1
gk1853 1.61 × 10−2 0.075 1.143 10−1
gk1874 2.11 × 10−2 0.02 1.143 10−1
gk1869 1.97 × 10−2 0.035 1.143 10−1
gk1722 2.45 × 105 0.025 1.143 10−2
gk1190 2.13 × 105 0.05 1.143 10−2
gk1738 1.91 × 105 0.075 1.143 10−2
gk1741 1.74 × 105 0.1 1.143 10−2
gk1752 2.57 × 105 0.02 1.143 10−2
gk1763 2.29 × 105 0.035 1.143 10−2
gk1773 1.46 × 105 0.2 1.143 10−2
gk1202 2.53 × 106 0.025 1.143 10−3
gk1365 2.19 × 106 0.05 1.143 10−3
gk1208 1.93 × 106 0.075 1.143 10−3
gk1212 1.75 × 106 0.1 1.143 10−3
gk1227 2.77 × 106 0.02 1.143 10−4
gk1219 2.49 × 106 0.035 1.143 10−4
gk1232 1.50 × 106 0.2 1.143 10−4
gk1616 2.66 × 106 0.025 1.143 10−4
gk1620 2.30 × 106 0.05 1.143 10−4
gk1626 2.03 × 106 0.075 1.143 10−4
gk1633 1.82 × 106 0.1 1.143 10−4
gk1639 2.77 × 106 0.02 1.143 10−4
gk1644 2.49 × 106 0.035 1.143 10−4
gk1652 1.48 × 106 0.2 1.143 10−4

195
Table B.6: Selected input parameters for simulations used to determine the criticalRayleigh number and wavelength for convection in ice I with composite rheology (Chap-ter 3), continued.
Run Name Rao δT/∆T k d (m)
gk1013 1.85 × 10−2 0.05 1.333 10−1
gk1040 1.83 × 10−2 0.05 1.25 10−1
gk1052 1.82 × 10−2 0.05 1.176 10−1
gk1062 1.82 × 10−2 0.05 1.111 10−1
gk1067 1.89 × 10−2 0.05 0.909 10−1
gk1083 1.83 × 10−2 0.05 1.052 10−1
gk1087 1.85 × 10−2 0.05 1 10−1
gk1100 2.20 × 105 0.05 1.428 10−2
gk1114 2.17 × 105 0.05 1.333 10−2
gk1128 2.14 × 105 0.05 1.25 10−2
gk1140 2.13 × 105 0.05 1.176 10−2
gk1190 2.13 × 105 0.05 1.143 10−2
gk1151 2.13 × 105 0.05 1.111 10−2
gk1198 2.15 × 105 0.05 1 10−2
gk1156 2.19 × 105 0.05 0.909 10−2
gk1300 2.25 × 106 0.05 1.428 10−3
gk1309 2.22 × 106 0.05 1.333 10−3
gk1312 2.20 × 106 0.05 1.25 10−3
gk1319 2.19 × 106 0.05 1.176 10−3
gk1365 2.19 × 106 0.05 1.143 10−3
gk1325 2.19 × 106 0.05 1.111 10−3
gk1377 2.20 × 106 0.05 1.052 10−3
gk1372 2.21 × 106 0.05 1 10−3
gk1503 2.37 × 106 0.05 1.428 10−4
gk1508 2.33 × 106 0.05 1.333 10−4
gk1516 2.31 × 106 0.05 1.25 10−4
gk1518 2.30 × 106 0.05 1.176 10−4
gk1524 2.30 × 106 0.05 1.111 10−4
gk1534 2.31 × 106 0.05 1.052 10−4
gk1539 2.32 × 106 0.05 1 10−4
gk1545 2.37 × 106 0.05 0.909 10−4

196
Table B.7: Weighting values for the composite rheology for ice I used in Chapters 3, 4,and 5.
d (m) βdisl βGBS βbs
1 × 10−1 1.48 × 1020 2.01 × 10−13 2.09 × 10−22
3 × 10−2 9.71 × 1015 2.84 × 10−12 6.77 × 10−20
2 × 10−2 3.79 × 1014 6.94 × 10−12 4.74 × 10−19
1 × 10−2 1.48 × 1012 3.19 × 10−11 1.32 × 10−17
3 × 10−3 9.71 × 107 4.50 × 10−10 4.27 × 10−15
1 × 10−3 1.48 × 104 5.05 × 10−9 8.33 × 10−13
3 × 10−4 9.71 × 10−1 7.14 × 10−8 2.69 × 10−10
1 × 10−4 1.48 × 10−4 8.00 × 10−7 5.26 × 10−8

197
Table B.8: Input parameters from simulations used to determine the convective heatflux and mass flux in Chapters 4 and 5.
Run Name Shell Thickness (km) d (m) δT/∆T Rao Time Step
a996 20 10−4 0.05 5.882 × 106 60000a963 20 3 × 10−4 0.05 6.536 × 105 N/Aa962 20 3 × 10−4 0.25 6.536 × 105 N/Aa995 20 10−3 0.05 3.102 × 106 25000a994 20 10−3 0.25 9.191 × 105 N/Aa974 20 3 × 10−3 0.05 6.536 × 103 N/Aa973 20 3 × 10−3 0.25 6.536 × 103 N/Aa989 20 10−2 0.05 5.882 × 102 N/Aa988 20 10−2 0.25 5.882 × 102 N/Aa981 20 3 × 10−2 0.05 6.536 × 101 N/Aa980 20 3 × 10−2 0.25 6.536 × 101 N/Aa970 35 10−4 0.05 3.153 × 107 55000a971 35 3 × 10−4 0.25 3.503 × 106 25000a969 35 3 × 10−2 0.05 3.503 × 102 25000a997 50 10−4 0.05 9.191 × 107 75000a967 50 3 × 10−4 0.05 1.021 × 107 50000a993 50 10−3 0.05 9.191 × 105 N/Aa992 50 10−3 0.25 5.882 × 104 N/Aa987 50 10−2 0.05 9.191 × 103 N/Aa986 50 10−2 0.25 9.191 × 103 N/Aa979 50 3 × 10−2 0.05 1.021 × 103 40000

198
Table B.9: Input parameters from simulations used to determine the convective heatflux and mass flux in Chapters 4 and 5 (continued).
Run Name Shell Thickness (km) d (m) δT/∆T Rao Time Step
a956 60 10−4 0.05 1.588 × 108 75000a955 60 3 × 10−4 0.05 1.765 × 107 45000a961 60 10−3 0.05 1.588 × 106 N/Aa959 60 10−3 0.25 1.588 × 106 15000a960 60 3 × 10−2 0.05 1.765 × 103 75000a998 75 10−4 0.05 3.102 × 108 75000a968 75 3 × 10−4 0.05 3.447 × 107 55000a991 75 10−3 0.05 5.882 × 104 N/Aa985 75 10−2 0.05 3.102 × 104 N/Aa984 75 10−2 0.25 3.102 × 104 N/Aa977 75 3 × 10−2 0.05 3.447 × 103 50000a965 85 10−4 0.05 4.516 × 108 N/Aa958 85 3 × 10−4 0.05 5.017 × 107 75000a957 85 10−3 0.05 4.516 × 106 N/Aa964 85 3 × 10−2 0.05 5.017 × 103 70000a999 100 10−4 0.05 7.353 × 108 N/Aa978 100 3 × 10−4 0.05 8.170 × 103 N/Aa976 100 3 × 10−4 0.05 8.170 × 107 75000a990 100 10−3 0.05 7.353 × 106 30000a975 100 3 × 10−3 0.05 8.170 × 105 N/Aa972 100 3 × 10−3 0.25 8.170 × 105 N/Aa983 100 10−2 0.05 7.353 × 104 N/Aa982 100 10−2 0.25 7.353 × 104 N/Aa966 150 3 × 10−3 0.05 2.757 × 106 N/A