controlo - institute for systems and...
TRANSCRIPT
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
1
CONTROLO DIGITAL
CONTROLO3º ano – 2º semestre – 2005/2006
Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC)
Departamento de Engenharia Electrotécnica e de Computadores (DEEC)
Transparências de apoio às aulas teóricas
Cap. 8 - Controlo Digital
Eduardo Morgado
Abril 2002
Revisto em Outubro 2003
Todos os direitos reservados Estas notas não podem ser usadas para fins distintos daqueles para que foram
elaboradas (leccionação no Instituto Superior Técnico) sem autorização do autor
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
2
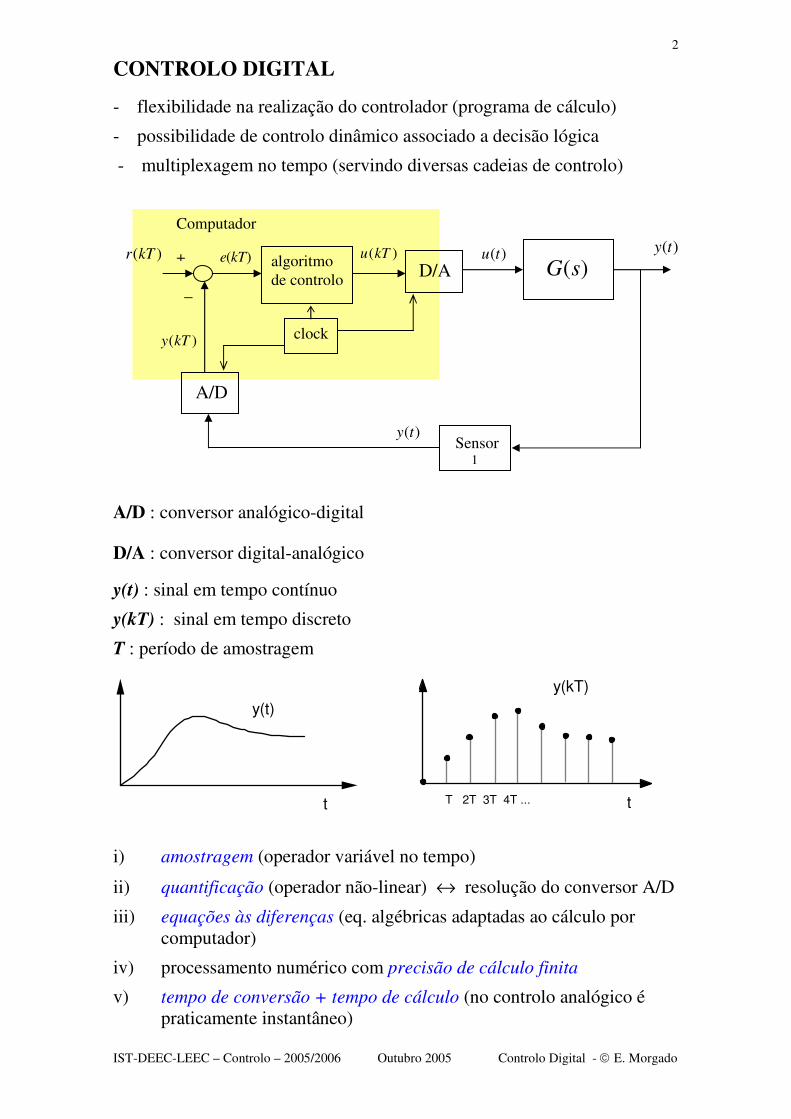
CONTROLO DIGITAL
- flexibilidade na realização do controlador (programa de cálculo)
- possibilidade de controlo dinâmico associado a decisão lógica
- multiplexagem no tempo (servindo diversas cadeias de controlo)
A/D : conversor analógico-digital
D/A : conversor digital-analógico
y(t) : sinal em tempo contínuo
y(kT) : sinal em tempo discreto
T : período de amostragem
i) amostragem (operador variável no tempo)
ii) quantificação (operador não-linear) ↔ resolução do conversor A/D
iii) equações às diferenças (eq. algébricas adaptadas ao cálculo por
computador)
iv) processamento numérico com precisão de cálculo finita
v) tempo de conversão + tempo de cálculo (no controlo analógico é
praticamente instantâneo)
)(kTr
Computador
algoritmo
de controlo
A/D
clock
D/A )(sG
)(kTe )(kTu
)(kTy
)(tu )(ty
Sensor 1
)(ty
+
−
y(t)
t t
y(kT)
T 2T 3T 4T ...

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
3
QUANTIFICAÇÃO
Erro de quantificação na conversão A/D ↔ resolução finita do conversor
M : tensão máxima representável
n : número de bits do conversor
Resolução (variação mínima detectável no sinal de entrada): n
Mr
2=
erro de quantificação (supondo arredondamento): 1222
1
+=
=
nn
MMq
operação não-linear � pode originar oscilações de ciclo limite
� ruído de quantificação
resolução dos conversores actuais comuns : 12 – 14 bit
Consideraremos:
Níveis de
quantificação
111
110
101
100
011
010
001
000
Sinal analógica de entrada
Característica entrada-saída de um conversor A/D de 3 bits
erro de quantificação (resolução do A/D) e
erro de arredondamento (precisão finita) amplitude dos sinais
<<
Analisaremos os efeitos do período de amostragem T

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
4
AMOSTRAGEM - Amostrador ideal
Amostragem impulsiva ou modulação por impulsos
∑∑+∞
−∞=
+∞
−∞=−=−=
kkkTtkTxkTttxtx )()()()()(* δδδδδδδδ
Seja:
{ } )()( ωωωωXtxTF = { } )()( ** ωωωωXtxTF =
deduz-se que:
Ts
ππππωωωω
2= : frequência de amostragem
Será possível recuperar o sinal x(t) a partir do sinal amostrado x*(t)?
Sim ...:
i) se x(t) for de banda limitada
ii) se se utilizar um filtro passa-baixo ideal
Teorema da amostragem
x(t) x*(t)
t
x*(t)
T 2T 3T ...
T
o espectro do sinal x*(t) resultante da amostragem impulsiva de x(t), é a sobreposição
de um conjunto infinito de réplicas do espectro de x(t) distanciadas na frequência de
ωs = 2π/T.
∑∞+
−∞=−=
kskX
TX )(
1)(* ωωωωωωωωωωωω

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
5
TEOREMA DA AMOSTRAGEM
Um sinal x(t) de banda limitada é inteiramente definido pelas suas amostras
x(nT), n = 0, ± 1, ± 2,..., se a frequência de amostragem T
s
ππππωωωω
2= for pelo
menos duas vezes superior à frequência máxima do sinal Mωωωω :
O sinal x(t) poderá ser reconstruído a partir das amostras obtidas por
amostragem impulsiva x*(t) utilizando um filtro passa-baixo ideal de
ganho T e largura de banda ωc:
ωM <ωc< (ωs - ωM )
Ms ωωωωωωωω 2>
x(t)x(t)
∑ δ (t-kT)
H(ω) x*(t)
ω
T
H(j ω )
ω c − ω c
X*( ω )
ω s ω s -
aliasing !
X(ω)
X*(ω)
ω sω s ω s ω s -
2
-
2
- ωM ωM

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
6
Resposta impulsiva do filtro passa-baixo ideal:
(com Tsc /2/ ππππωωωωωωωω == )
{ }
== −
T
t
Tt
HTFthππππ
ππππωωωω sen
1)()( 1
⇔ não-causal !
sinal à saída de H(ω):
∑∞+
−∞=
−=∗=
k T
kTtsinckTxtxthtx
)()()()()( * ππππ
A função sinc faz a interpolação das amostras

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
7
RETENTOR DE ORDEM ZERO (ZOH – Zero Order Hold)
xh(t) provém da retenção do valor das amostras durante o intervalo de amostragem T
Função de transferência: { }s
ethTLsH
Ts−−==
1)()(
{ } [ ]
[ ])()()(
)()()()()()()(*
TkTtukTtukTx
kTxTtututxthtx
k
kh
−−−−∑=
=∫ ∑ −−−−−=∗=
∞+
−∞=
+∞
∞−
∞+
−∞=ττττδδδδττττττττττττ
Interpolação das amostras x(kT) por polinómio de ordem zero
Os conversores D/A mais utilizados funcionam no modo ZOH
x(t) x*(t)
T
ZOHx h (t)
t
x h (t)
T 2T 3T ...
x(t)
ZOH(jω)
T
ωs-ωs 2ωs-2ωs
Não é filtro passa-baixo ideal
ZOH T
1
00
δ(t)
Resposta ao impulso: h(t) = u(t) – u(t-T)

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
8
TRANSFORMADA Z
Seja )(* tx o sinal resultante da aplicação do amostrador ideal ao sinal causal )(tx
∑ −∑ =−=∞+
=
∞+
= 00
* )()()()()(kk
kTtkTxkTttxtx δδδδδδδδ
e tome-se a respectiva transformada de Laplace )(* sX :
skT
k
st ekTxdtetxsX −∞+
=
∞+−
∑∫ == )()()(00
**
definindo a variável z como: sTez = , vem:
∑==∞+
=
−
= 0
* )()()(k
ksT
ezzkTxzXsX
Na variável tempo discreto k, escreve-se:
[ ]∑=∞+
=
−
0
)(k
kzkxzX
que é a Transformada-Z unilateral da sequência x[k].
Algumas Propriedades:
- teorema do valor inicial: [ ] )(lim0 zXxz +∞→
=
- teorema do valor final: [ ] )()1(limlim1
1
zXzkxzk
−
→+∞→−=
⇒ ganho estático: 1
)( =zzG
- convolução: [ ] [ ]{ } )()( zYzXkykxZ =∗
- diferença: [ ]{ } )(zXznkxZ n−=− (condições iniciais nulas)

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
9
RELAÇÂO ENTRE OS POLOS DE X(s) E OS POLOS DE X(z)
Exemplo:
sinal analógico: )()( tuetx at−= ⇔ as
sX+
=1
)( ))(:( aseROC −>ℜ
sinal amostrado: )()( kTuekTx akT−= ⇔
⇔ ∑−
=−
==∞+
= −−−−−
011
1)(
kaTaT
kakT
ez
z
zezezX ):( aTezROC −>
donde, entre o polo de X(s), s = -a, no plano-s, e o polo de X(z), z = e-aT
, no
plano-z, observa-se a relação
em que T é o período de amostragem
Esta relação, entre os polos da transformada de Laplace de um sinal em
tempo contínuo e os polos da transformada-Z do sinal resultante da
amostragem com período T, é geral.
Mas não há uma relação geral entre os zeros das transformadas !
t 6T 4T 5T 3T 2T T 0 t
x(t)
x[kT]
sTez =

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
10
ESTABILIDADE
Polos no Semiplano Complexo Esquerdo:
ωωωωσσσσ js ±= com 0<σσσσ
Correspondentes no plano-z:
TjT eesTez ωωωωσσσσ ±== ( T > 0)
Donde: 0<σσσσ ⇔ 1<= ze Tσσσσ
Condição de estabilidade (assimptótica) para sistemas causais em tempo
discreto descritos por funções de transferência racionais em z:
⇔ todos os polos no interior do círculo unitário no plano-z
Conhecemos a relação:
localização de polos no plano-s � resposta transitória em tempo
contínuo
através da aplicação sT
ez = inferimos a relação:
localização de polos no plano-z � resposta transitória em tempo
discreto
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
11
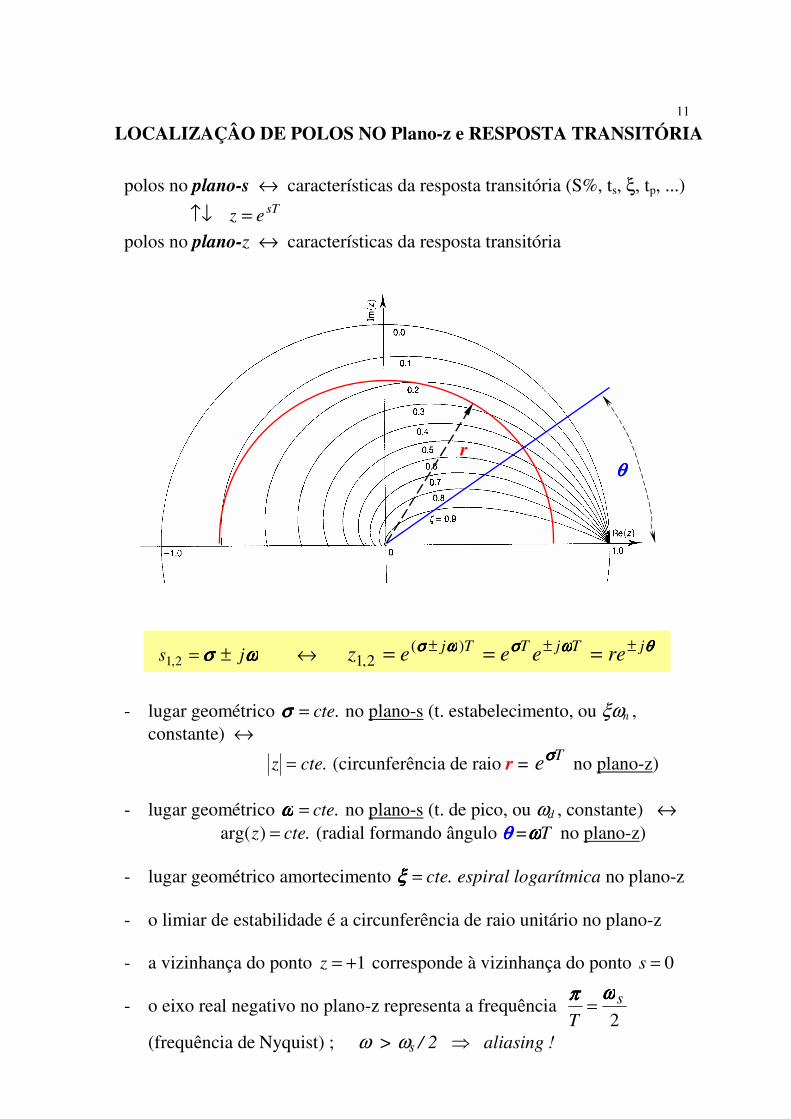
LOCALIZAÇÂO DE POLOS NO Plano-z e RESPOSTA TRANSITÓRIA
polos no plano-s ↔ características da resposta transitória (S%, ts, ξ, tp, ...)
↑↓ sTez =
polos no plano-z ↔ características da resposta transitória
- lugar geométrico .cte=σσσσ no plano-s (t. estabelecimento, ou ξωn ,
constante) ↔
.ctez = (circunferência de raio r = T
eσσσσ
no plano-z)
- lugar geométrico .cte=ωωωω no plano-s (t. de pico, ou ωd , constante) ↔
.)arg( ctez = (radial formando ângulo θθθθ = Tωωωω no plano-z)
- lugar geométrico amortecimento .cte=ξξξξ espiral logarítmica no plano-z
- o limiar de estabilidade é a circunferência de raio unitário no plano-z
- a vizinhança do ponto 1+=z corresponde à vizinhança do ponto 0=s
- o eixo real negativo no plano-z representa a frequência 2
s
T
ωωωωππππ=
(frequência de Nyquist) ; ω > ωs / 2 ⇒ aliasing !
r θθθθ
ωωωωσσσσ js ±=2,1 ↔ θθθθωωωωσσσσωωωωσσσσ jTjTTj
reeeez±±± === )(
2,1
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
12
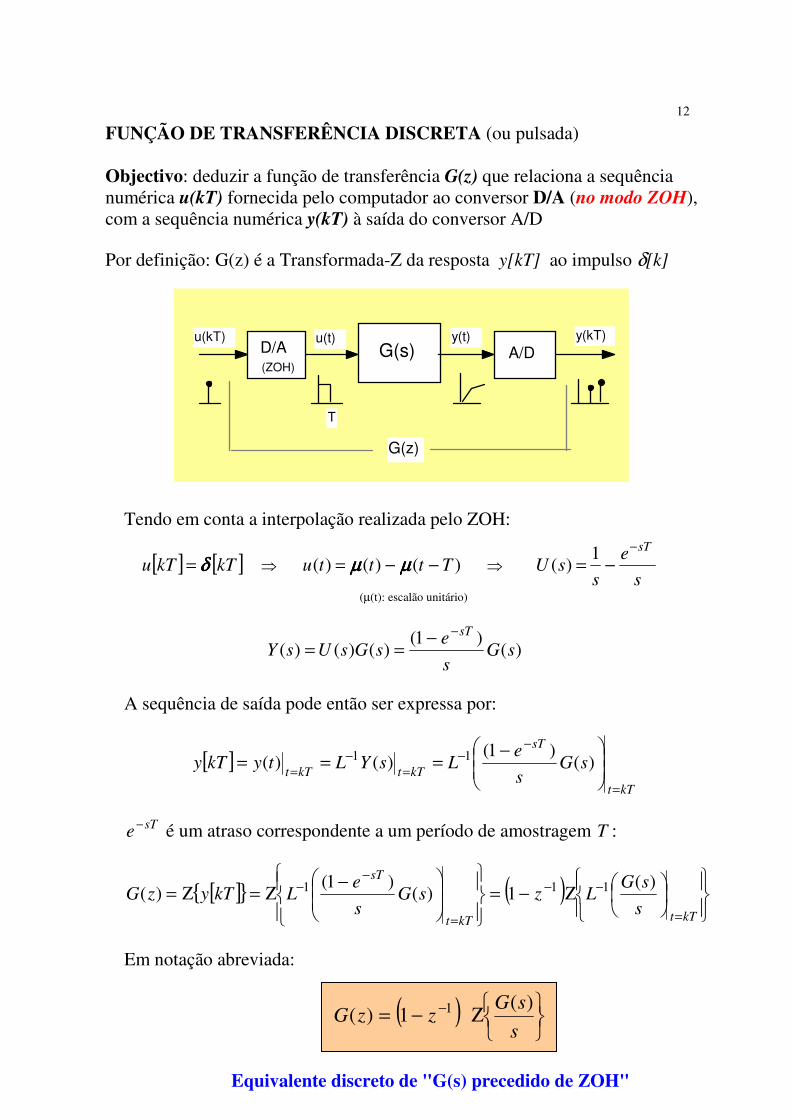
FUNÇÃO DE TRANSFERÊNCIA DISCRETA (ou pulsada)
Objectivo: deduzir a função de transferência G(z) que relaciona a sequência
numérica u(kT) fornecida pelo computador ao conversor D/A (no modo ZOH),
com a sequência numérica y(kT) à saída do conversor A/D
Por definição: G(z) é a Transformada-Z da resposta y[kT] ao impulso δ[k]
Tendo em conta a interpolação realizada pelo ZOH:
[ ] [ ]kTkTu δδδδ= ⇒ )()()( Ttttu −−= µµµµµµµµ ⇒ s
e
ssU
sT−
−=1
)(
(µ(t): escalão unitário)
)()1(
)()()( sGs
esGsUsY
sT−−==
A sequência de saída pode então ser expressa por:
[ ]kTt
sT
kTtkTtsG
s
eLsYLtykTy
=
−−
=−
=
−=== )(
)1()()( 11
sTe− é um atraso correspondente a um período de amostragem T :
[ ]{ } ( )
Ζ−=
−Ζ=Ζ=
=
−−
=
−−
kTtkTt
sT
s
sGLzsG
s
eLkTyzG
)(1)(
)1()( 111
Em notação abreviada:
Equivalente discreto de "G(s) precedido de ZOH"
( )
Ζ−= −
s
sGzzG
)(1)( 1
D/A(ZOH)
A/DG(s)u(kT) u(t) y(t) y(kT)
T
G(z)

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
13
EXEMPLO:
Controlo Analógico
as
asG
+=)( lei de controlo: [ ])()()()( tytrKtKetu −==
)(1
)(
)(
)(
sKG
sKG
sR
sY
+=
Controlo Digital
i) - Cálculo do equivalente discreto de G(s) precedido do ZOH –
modelo do sistema “visto” pelo computador nos instantes de amostragem
( )
Ζ−= −
s
sGzzG
)(1)( 1
as
asG
+=)(
assass
a
s
sG
+−=
+=
11
)(
)(
)()()(1 tet
s
sGL at µµµµµµµµ −− −=
)(tµµµµ : escalão unitário (para não confundir
com o sinal de comando )(tu )
D/A
A/D
G(s)Computador
r(kT) u(kT) y(t)
y(kT)
(ZOH)
u(t)
x
plano s
-a eℜ
mℑ
)(ty
)(sG K
)(tu )(te +
−
)(tr

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
14
O correspondente sinal amostrado é: )()( kTekT akT µµµµµµµµ −−
Então:
( ) { }( )
aT
aT
aT
aT
aT
akT
ez
e
ze
zez
zezz
kTekTzzG
−
−
−−
−−−
−−−−
−−
−
−=
−
−=
−−
−−=
=−Ζ−=
1
11
1
1
11
)()(1)(
1
11
11
1
1 µµ
ii)- Lei de controlo proporcional: [ ])()()()( kTykTrKkTKekTu −==
)(1
)(
)(
)(
zKG
zKG
zR
zY
+=
Notar que:
- as regras de construção do root-locus no plano-z são idênticas às
utilizadas no plano-s; a interpretação é que é diferente
- o valor do polo de G(z) depende do período de amostragem
- o sistema de 1ª ordem em tempo discreto não é estável para todo o K>0,
ao contrário do seu análogo em tempo contínuo
)(kTr )(kTy
)(zGK
)(kTu)(kTe +
−
eℜ x
1-1
plano z
e -aT
mℑ

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
15
Detalhes do Root-Locus
Análise do polo em malha fechada
)1(
)1(
)(
)1(1
)(
)1(
)(1
)(
)(
)(
aTaT
aT
aT
aT
aT
aT
ekez
ek
ez
ek
ez
ek
zKG
zKG
zR
zY
−−
−
−
−
−
−
−+−
−=
−
−+
−
−
=
=+
=
)1(
0)1(
−+=⇒
=−+−−−
−−
aTaT
aTaT
ekez
ekez
eℜ x
1 -1
plano z
e -aT
mℑ
fechadamalhaem
instávelésistemaz
kkpara critico
⇒−<
>
1
,

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
16
PROJECTO DO CONTROLADOR DIGITAL (Algoritmo)
Problema: Determinar a equação às diferenças (ou a correspondente
função de transferência C(z) ) a programar no computador para obter o
comportamento desejado do sistema em malha fechada
Duas vias:
I - Obter o modelo discreto da “plant” G(s) � G(z) e projectar o
controlador no plano-z � PROJECTO DIRECTO
(projecto no plano-z precedido da discretização do sistema)
II - Projectar o controlador no plano-s, C(s), e determinar um “equivalente”
no plano-z: C(s) � C(z) � PROJECTO POR EMULAÇÂO
(projecto no plano-s seguido da discretização do controlador)
(ZOH) G(s) � G(z) = (1-z-1) Z
s
sG )(
Especificações � polos no plano-s (dominantes ...)
polos no plano-z
Projecto no
plano-z → = sTez
C(z)
G(s)
Especificações � polos no plano-s (dominantes ...)
Projecto no plano-s
C(s)
- método de Tustin - mapeamento polos e
zeros
- .............
C(z)
escolha de T

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
17
EXEMPLO:
as
asG
+=)( com a = 0,5
especificações da resposta ao escalão :
- erro em regime permanente nulo
- Sobreelevação ≈ 16 %
- Tempo de estabelecimento ( 5 %) ≈ 10 seg
Objectivo: Dimensionar um controlador digital )(
)()(
ββββαααα
−−
=z
zKzC
por forma a cumprir aquelas especificações
-------------------------------------------------------------------------------------------------------------------------------
PROJECTO DIRECTO
Dados: G(s) e especificações da resposta temporal em tempo contínuo
Etapas do projecto:
i) G(s) �
Ζ
−−=
s
sGzzG
)(11)(
(para conversor D/A no modo ZOH)
iii) especificações �
� polos desejados no plano-s →= sTez polos desejados no plano-z
iii) escolha e dimensionamento do controlador )(zC
iv) simulação e ajuste de parâmetros
via adequada a: sistema “rápido” – processador “lento”
(frequência de amostragem limitada pelo processador)
)(kTr
Computador
algoritmo
de controlo
A/D
D/A (ZOH)
)(sG )(kTe )(kTu
)(kTy
)(tu )(ty
+
−

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
18
é dado o período de amostragem: T = 1 seg
i) ( )607,0
393,01...
)(1)( 1
−=
−
−==
Ζ−=
−
−−
zez
e
s
sGzzG
aT
aT
(determinado anteriormente)
ii) S = 16 % ⇒ ξ = 0,504
ts (5%) = 10 seg = 3/ ξ ωn ⇒ ξ ωn = 0,3
ωd = 0,51
polos desejados no plano-s (supostos dominantes) : s1,2 = - 0,3 ±±±± j 0,51
polos desejados no plano-z :
z = esT = e
- 0,30T e± j 0,51T
= e- 0,30T
[cos (0,51 T) ± j sen (0,51 T)] =
= 0,647 ±±±± j 0,362
iii) erro em regime permanente nulo para entrada escalão ⇒ β = 1
Controlador Proporcional Integral (PI) discreto
)1(
)()(
−−
=z
zKzC
αααα
(mostre que o denominador (z -1) anula o erro estático ao escalão)
PROJECTO DIRECTO
(projecto no plano-z, precedido da discretização do sistema)

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
19
iv) dimensionamento do controlador
)()(1
)()(
)(
)(
zGzC
zGzC
zR
zY
+=
equação característica: 0)607,0(
393.0.
)1(
)(1 =
−−−
+zz
zK
α
0393,0)()607,0)(1( =−+−− αzKzz
polinómio característico desejado:
z = 0,647 ± j 0,362 ⇒ z2 – 1,294 z + 0,550
por identificação dos polinómios característicos, calcula-se:
⇒ K = 0,796 αααα = 0,182
equação às diferenças a implementar no computador:
)1(
)182,0(796,0
)(
)(
−−
=z
z
zE
zU
)(145,0)(796,0)()( zEzzEzUzzU −=−
donde:
)(145,0)1(796,0)()1( nenenunu −+=−+
ou:
)(zR )(zY
)(zG)(zU)(zE+
−
)(zC
)1(
)182,0(796,0)(
−−
=z
zzC
)1(145,0)(796,0)1()( −−+−= nenenunu

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
20
resposta ao escalão y(kT): 550,0294,1
0569,0313,0
)(
)(
2 +−
−=
zz
z
zR
zY
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec.)
Am
plit
ude
Step Response
projecto directo
T= 1 seg
Resposta ao escalão em tempo discreto
Root-locus - f.t.malha aberta: 607.0607.1
182.0
)607.0)(1(
393.0)182.0(796.02 +−
−=
−−
−
zz
zK
zz
z
-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.5
0
0.5
1
Root Locus
Real Axis
Imagin
ary
Axis
projecto directo
plano-z
Root-locus – notar a circunferência unitária, os polos e zero da malha
aberta e os polos projectados da malha fechada

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
21
Voltando à equação às diferenças resultante do projecto:
)1(145,0)(796,0)1()( −−+−= nenenunu
... a saída u depende da entrada e no mesmo instante de amostragem ...
Impossível de realizar, porque existe um tempo finito de latência para o cálculo de u(n)!
dois procedimentos possíveis:
a) - Conversores A/D e D/A não sincronizados - O conversor D/A
espera pelo resultado do cálculo. Se o tempo de cálculo (“tempo
de latência”) << T (~1/20) aquela equação às diferenças é uma
boa aproximação do processo real.
b) - Conversores A/D e D/A sincronizados - Introduz-se um atraso
unitário z-1
correspondente a um período de amostragem (ou seja,
“ataca-se” directamente o facto de haver um período de
latência), � polo adicional do controlador em z = 0.
Adoptando este último procedimento (atraso unitário):
11 .
)1(
)(
)(
)()( −
−−
== zz
zK
zE
zUzC
αααα
haverá, então, que refazer o dimensionamento:
equação característica: 0)607,0(
393.0.
)1(
)(1 =
−−−
+zzz
zK
α
0393,0)()607,0)(1( =−+−− αzKzzz
)(zR )(zY
)(zG)(zU)(zE+
−
)(zC 1−z

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
22
polinómio característico desejado:
z = 0,647 ± j 0,362 ⇒ (z2 – 1,294 z + 0,550)(z – x)
notar que o polinómio característico é de 3º grau � além dos polos
projectados (desejados) existe um terceiro polo z = x.
se n – m ≥ 2 ⇒ ∑ polos da malha aberta = ∑ polos da malha fechada
temos: n–m = 2
0+1+0,607 = 0,647 + j 0,362 + 0,647 – j 0,362 + x ⇒ x = 0,313
(z2 – 1,294 z + 0,550)(z – 0,313)
por identificação dos polinómios característicos, calcula-se:
⇒ K = 0,885 αααα = 0,495
equação às diferenças a implementar no computador:
)1(
)495,0(885,0
)(
)(
−
−=
zz
z
zE
zU
)(128,0)(885,0)()(2 zEzzEzzUzUz −=−
donde:
)(128,0)1(885,0)1()2( nenenunu −+=+−+
ou:
assim, a saída do filtro digital no instante de amostragem n resulta de dados
de entrada referentes a instantes de amostragem anteriores.
)1(
)495,0(885,0)(
−−
=zz
zzC
)2(128,0)1(885,0)1()( −−−+−= nenenunu

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
23
resposta ao escalão y(kT): 172,0955,0607,1
172,03478,0
)(
)(
23 −+−
−=
zzz
z
zR
zY
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec.)
Am
plit
ude
Step Response
projecto directo
T= 1 seg
(c/ atraso unitário)
Root-locus - f. t. malha aberta: zzz
zK
zzz
z
607.0607.1
495.0
)607.0)(1(
393.0)495.0(885.023 +−
−=
−−−
-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.5
0
0.5
1
Root Locus
Real Axis
Imagin
ary
Axis
projecto directo
plano-z

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
24
Dados: G(s) e especificações da resposta temporal em tempo contínuo
Etapas do projecto:
iv) Especificações � polos desejados no plano-s � escolha e
dimensionamento do controlador )(sC
v) escolha do período de amostragem T
vi) controlador digital “equivalente” C(z)
iv) simulação e ajuste de parâmetros
No EXEMPLO presente, recordando:
sistema (plant): 5,0
5,0)(
+=
ssG
especificações da resposta ao escalão :
- erro em regime permanente nulo
- Sobreelevação ≈ 16 %
- Tempo de estabelecimento (5 %) ≈ 10 seg
PROJECTO POR EMULAÇÃO (projecto no plano-s, seguido da discretização do controlador)
)(kTr
Computador
algoritmo
de controlo
A/D
D/A (ZOH)
)(sG
)(kTe
)(kTu
)(kTy
)(tu
)(ty
+
−
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
25
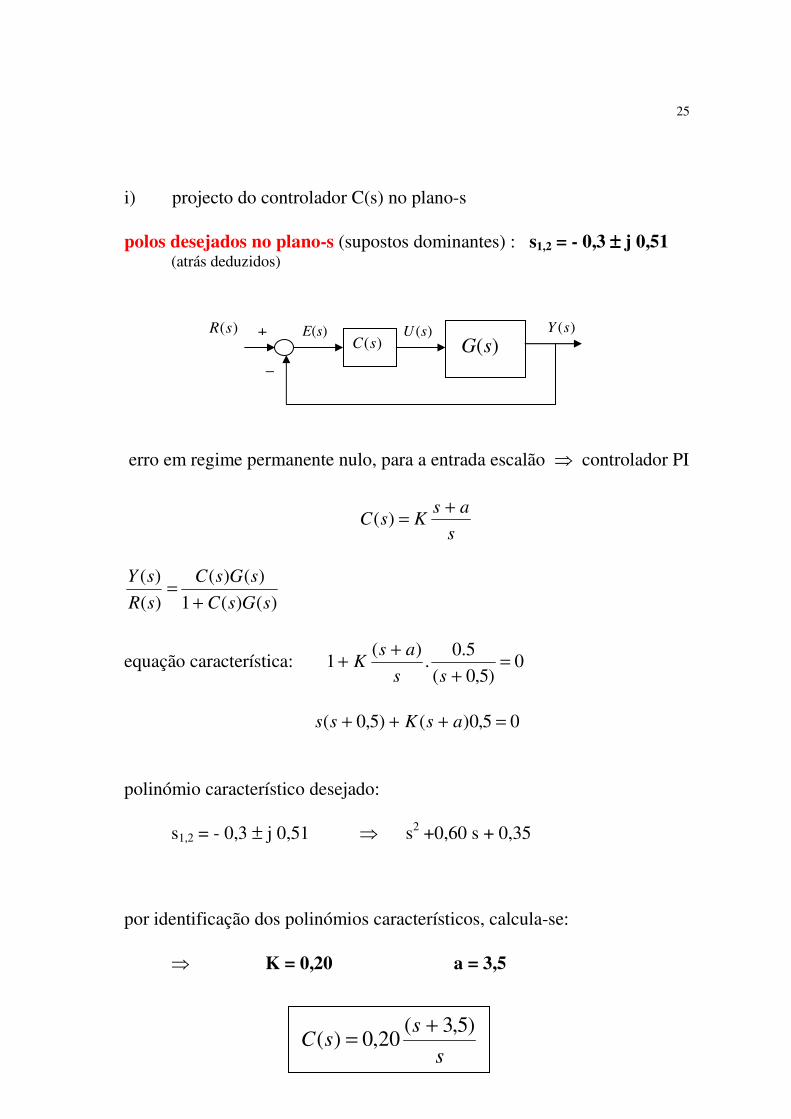
i) projecto do controlador C(s) no plano-s
polos desejados no plano-s (supostos dominantes) : s1,2 = - 0,3 ±±±± j 0,51 (atrás deduzidos)
erro em regime permanente nulo, para a entrada escalão ⇒ controlador PI
s
asKsC
+=)(
)()(1
)()(
)(
)(
sGsC
sGsC
sR
sY
+=
equação característica: 0)5,0(
5.0.
)(1 =
+
++
ss
asK
05,0)()5,0( =+++ asKss
polinómio característico desejado:
s1,2 = - 0,3 ± j 0,51 ⇒ s2 +0,60 s + 0,35
por identificação dos polinómios característicos, calcula-se:
⇒ K = 0,20 a = 3,5
)(sR )(sY
)(sG)(sU)(sE+
−
)(sC
s
ssC
)5,3(20,0)(
+=
IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
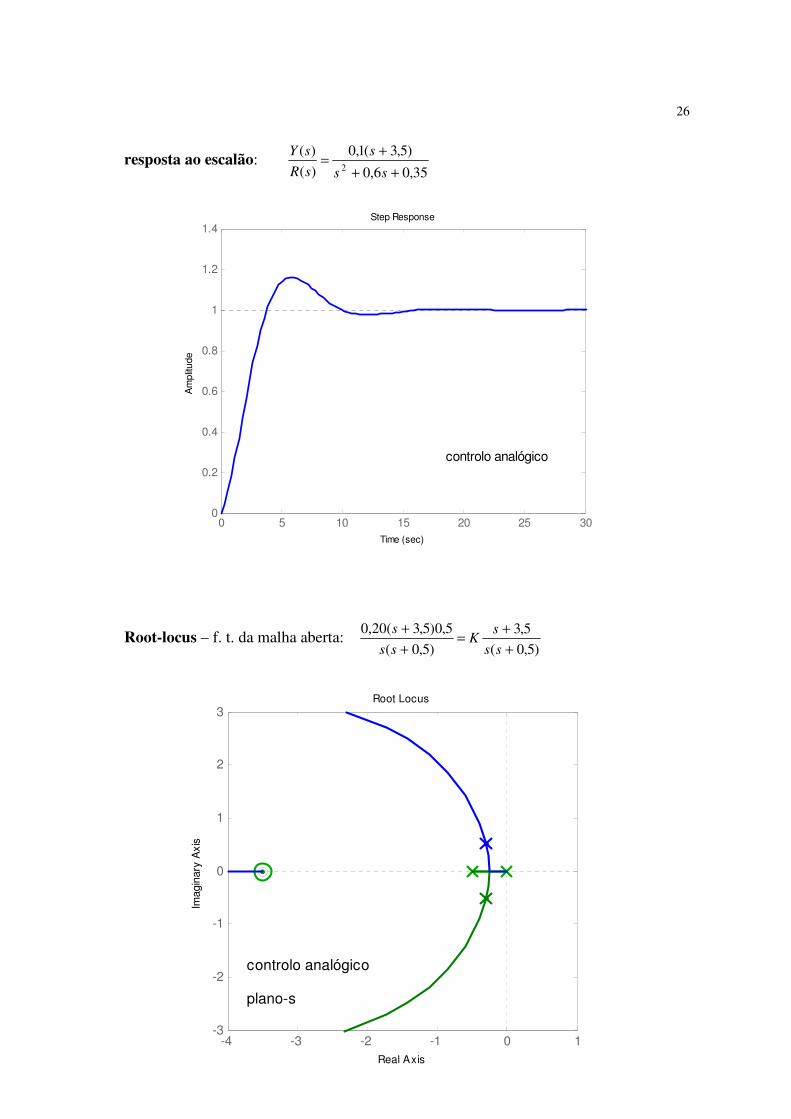
26
resposta ao escalão: 35,06,0
)5,3(1,0
)(
)(2 ++
+=
ss
s
sR
sY
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ude
controlo analógico
Root-locus – f. t. da malha aberta: )5,0(
5,3
)5,0(
5,0)5,3(20,0
+
+=
+
+
ss
sK
ss
s
-4 -3 -2 -1 0 1-3
-2
-1
0
1
2
3Root Locus
Real Axis
Imagin
ary
Axis
controlo analógico
plano-s

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
27
------------------------------------------------------------------------------------------
Problema 1: Dado C(s) qual o controlador equivalente C(z) ? (i.e., como
obter o equivalente discreto de um filtro contínuo ?)
Não há uma solução exacta ! porque C(z) tem acesso apenas às amostras do
sinal de entrada nos instantes de amostragem, enquanto C(s) processa
continuamente no tempo.
Referimos dois métodos (entre outros ...) necessariamente aproximados
I - Mapeamento dos polos e dos zeros
- os polos de C(z) e de C(s) relacionam-se como z = esT
.
- os zeros de C(z) e de C(s) relacionam-se como z = esT
.
- ganhos estáticos iguais: C(s)s=0 = C(z)z=1
é atraente pela simplicidade
II - Método de Tustin ou da transformação bilinear
baseia-se numa aproximação numérica da integração:
seja o integrador: s
sCsE
sU 1)(
)(
)(== ∫= t
detu0
)()( ττττττττ
ou ∫ −+−= kTTkT
dtteTkTukTu )()()(
aproximando aquele integral no intervalo T pela área de um trapézio
(integração trapezoidal) :
[ ])()(2
)()( kTeTkTeT
TkTukTu +−+−=

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
28
aproximando aquele integral no intervalo T pela área de um trapézio
(integração trapezoidal) :
[ ])()(2
)()( kTeTkTeT
TkTukTu +−+−=
na transformada-Z :
)(1
1
2)(
)(1
1
zCz
zT
zE
zU=
−
+=
−
−
↔ s
sCsE
sU 1)(
)(
)(==
donde, aquela aproximação numérica corresponde à relação:
+−
=
+
−=
−
−
1
12
1
12
1
1
z
z
Tz
z
Ts (transformação bilinear)
------------------------------------------------------------------------------------------
Problema 2: como escolher o período de amostragem T ?
×≥= 202
Ts
ππππωωωω Largura de Banda (-3dB) da malha fechada
[G.F.Franklin,J.D.Powell,M.L.Workman,DigitalControl of Dynamic Systems, Addison-Wesley]
(note-se que, adoptando a via do Projecto Directo no plano-z podem utilizar-se
frequências de amostragem ωs menores com resultados aceitáveis)
------------------------------------------------------------------------------------------
s z
10
e(t)
tkT-T kT

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
29
Retomando o EXEMPLO de projecto por emulação:
vii) escolha do período de amostragem T
L.B. (-3dB) da malha fechada:
( ) )0(
)0(.
2
1
35,06,0
)5,3(1,0
)(
)(2
R
Y
jj
j
jR
jY=
++
+=
ωω
ωωω
⇒ ωLB ≈ 0,75 rad/s
ωs ≥ 20× 0,75 = 15 rad/s ⇒ T ≈≈≈≈ 0,4 seg
iii) controlador digital “equivalente” C(z)
utilizando o método de Tustin (ou da transformação bilinear):
s
ssC
)5,3(20,0)(
+= (resultante do projecto no plano-s)
+−
=
+
−=
−
−
1
12
1
12
1
1
z
z
Tz
z
Ts T = 0,4 seg
obtem-se: ( )
1
176,0340,0)(
−−
=z
zzC
viii) simulação
para simular teremos de achar o modelo discreto do sistema, G(z),
para T = 0,4 seg :
( )819,0
181,01...
)(1)(
1
−=
−
−==
Ζ−=−
−−
zez
e
s
sGzzG
aT
aT

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
30
resposta ao escalão: 808,0758,1
0109,00615,0
)(
)(
2 +−
−=
zz
z
zR
zY
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec.)
Am
plit
ude
Step Response
Método de Tustin
T= 0.4 seg
O que acontecerá se na escolha do período de amostragem nos desviarmos
do critério ×≥= 202
Ts
ππππωωωω Largura de Banda (-3dB) da malha fechada ?
Seja T = 1seg :
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec.)
Am
plit
ude
Step Response
Método de Tustin
T= 1 seg
666,0391,1
059,0216,0
)(
)(
2 +−
+=
zz
z
zR
zY
607,0
393,0)(
−=
zzG
( )1
273,0550,0)(
−
+=
z
zzC

IST-DEEC-LEEC – Controlo – 2005/2006 Outubro 2005 Controlo Digital - E. Morgado
31
Com T = 1 seg. observa-se uma degradação da resposta dinâmica face à
escolha de T = 0,4 seg, com afastamento significativo das especificações
(recorde-se contudo que na via Projecto Directo fez-se T = 1 seg com bons
resultados !)
As modificações na resposta temporal estão associadas à dependência da
localização dos polos no plano-z com o valor do período de amostragem.
(calcule os polos da malha fechada para os dois casos anteriores, T = 0,4 e
T = 1, e justifique as alterações observadas na resposta ao escalão)
Nas respostas temporais obtidas, verificou-se sempre que as especificaçõe
dinâmicas nunca eram rigorosamente satisfeitas; tal deve-se ou às
aproximações inerentes à conversão plano-s/plano-z ou aos polos
projectados (de 2ª ordem) não serem suficientemente dominantes
� o passo seguinte do projecto seria o ajuste dos parâmetros do
controlador em simulação na vizinhança dos valores calculados.