control of electric vehicles using a model predictive
TRANSCRIPT

CONTROL OF ELECTRIC VEHICLES USING A MODEL PREDICTIVE CONTROLLER WITH CLOSED FORM SOLUTION
Milad Jalaliyazdi University of Waterloo
Waterloo, Ontario, Canada
Amir Khajepour University of Waterloo
Waterloo, Ontario, Canada
Shih-Ken Chen R&D General Motors
Warren, MI, USA
ABSTRACT In this paper, the problem of vehicle stability control using
model predictive technique is addressed. The vehicle under
consideration is an electric vehicle with an electric motor
driving each wheel independently. For the purpose of stability
control, it is required that the vehicle tracks a desired yaw rate
at all times therefore, extending the linear range of the vehicle
dynamics. The desired yaw rate is defined based on vehicle
speed, steering wheel angle and road surface friction.
The vehicle stability control system considered in this paper
consists of a high-level controller that compares the current
states of the vehicle with its desired states to determine the
required forces and moments at the center of mass, and a low-
level controller to track those C.G. forces and moments by
adjusting the motor torques on each wheel. It will be shown
that a non-predictive low-level controller can have a closed
form solution. In order to avoid saturation of the tires, the low-
level controller has a penalty function that increases
exponentially when the tire forces are close to the limits of
saturation to reduce tire forces to keep them within the tires
force capacity.
In this paper, a model predictive controller is designed as the
low-level controller to predict the tire forces and the yaw
moment at the C.G. to minimize the tracking error of desired
C.G. forces and moments. To keep the tire forces within the
tires capacity limit, a penalty function is used at each sample
time to penalize control actions that result in excessive tire
forces. This adds a level of anticipation to the low-level
controller to detect in advance when tires are about to saturate
and to choose control actions to prevent that from happening.
Since tire capacity limit is treated with an analytical penalty
function, it is still possible to find a closed form solution for the
model predictive low-level controller. The proposed controller
is tested with simulations and the results are compared with a
similar non-predictive controller.
Alireza Kasaeizadeh University of Waterloo
Waterloo, Ontario, Canada
Bakhtiar Litkouhi R&D General Motors
Warren, MI, USA
Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014
November 14-20, 2014, Montreal, Quebec, Canada
IMECE2014-38316
1 Copyright © 2014 by ASME and General Motors
NOMENCLATURE Table 1 Nomenclature
C.G. Center of Gravity
Reff Effective wheel radius
Li Distance from C.G. to front (i=F) or rear (i=R) axle
L Wheel base
w Track width
u Vehicle C.G. forward velocity
v Vehicle C.G. lateral velocity
r Vehicle yaw rate
𝛼𝑖𝑗 Slip angle of tire ij
𝐶𝛼𝑖𝑗 Cornering stiffness of tire ij
𝑘𝑢𝑠 Understeer gradient
𝛿𝑓 Wheel steering angle
𝜇 Road adhesion factor
INTRODUCTION Traffic accidents are one of the major reasons for driver fatality.
In Canada, 2227 lost their lives in traffic accidents in 2010
([1]). These accidents typically happen in unfavorable driving
conditions such as high vehicle speeds, low surface friction,
sudden change in road conditions, etc. In these situations, the
behavior of the vehicle is quite different from what normal
drivers are used to in everyday normal driving. This highlights
the need for vehicle safety systems that can assist the driver in
such situations. Vehicle stability systems such as ABS (Anti-
lock Braking System), TCS (Traction Control System) and ESC
(Electronic Stability Control) are very effective in assisting
drivers from losing control of the vehicle. However, further
development of additional active safety systems is still needed
to reduce traffic accidents. Furthermore, new types of vehicle
such as hybrid electric and fully electric vehicles have emerged
over the past decade prompting the need for developing
systems that are tailored for these particular types of vehicles.
Common to all the actuation methods is the fact that they have
limited actuation capacity, which in the control theory, leads to
a constraint. A controller is normally designed for an
unconstrained system, and when the actuation demand reaches
the capacity limit, it is reduced to the limit. This approach,
however, can lead to oscillatory responses and also raise the
question of optimality of the control approach.
The model predictive control (MPC) technique has the ability
of explicitly considering the actuator and state constraints. In
the MPC approach, not only the constraints are satisfied, their
information is used to find an optimal solution. These
properties make model predictive control a unique technique
for vehicle control systems.
The essential component of the MPC is the prediction model.
The overall performance of the controller greatly depends on
the accuracy of the prediction model. Nonlinear models are an
attractive choice because unlike linear models, they are often
accurate in a much broader range of vehicle operation.
Therefore, they can provide a better description of the global
dynamics of the system. A few authors have tried nonlinear
model predictive control (NLMPC) in their work. For instance,
Borreli et al [2] studied active steering of autonomous vehicle
systems using model predictive control. They used a nonlinear
bicycle model along with the Pacejka tire model as the system
model, and the actuation was active front steering. Using
nonlinear MPC, they tried to find optimal control actions to
perform path tracking. For NLMPC, the commercial code
NPSOL ([3]) was used to solve the nonlinear programming
problem. They showed the controller effectiveness in a double
lane change maneuver with increasing entry speeds during
vehicle coasting (i.e. no traction torque or brakes).
In spite of excellent performance of NLMPC controllers, their
practical use is very limited. This is because using a nonlinear
model as the prediction model for a MPC controller leads to a
nonlinear optimization problem that needs to be solved at each
sampling time. Although there exists nonlinear programming
solvers (e.g. [3, 4]), using a nonlinear model is generally
unfavourable due to implementation difficulties. Therefore,
many researchers start by a nonlinear model of the system, and
use successive linearization of that model to avoid nonlinear
programming. This approach gives a sub-optimal controller.
For example, Palmieri et al [5] used a linear time-varying
(LTV) MPC method to stabilize a vehicle during harsh
maneuvers such as high-speed double-lane change. They used a
full vehicle model for prediction. The model was linearized at
each time step, thus leading to a LTV-MPC problem which is
much easier to tackle. Falcone et al [6] used a linearized
version of the nonlinear vehicle model for the purpose of
designing a model predictive controller for path tracking of an
autonomous vehicle. The controlled variables were the front
steering angle and active braking/active differential. They
investigated the tracking performance of the proposed
controller in a double lane change maneuver on a slippery road
with computer simulations. Similar technique is used in [7-10].
Although linearization is performed at each sample time, it is
only valid for small changes in the variables throughout the
prediction window. If the changes are not small, then modelling
inaccuracy can result in performance degradation. Another
approach for having an accurate yet not so complex prediction
model is using hybrid dynamic models (see [11-13] for more
details). In this approach, the nonlinearity of the model is
approximated by piece-wise affine (PWA) functions. Based on
the state of the system, one of the affine functions is activated
at each instant of time. The index of the active function(s) is
one of the variables of the system, thus forming a hybrid
system model or mixed integer dynamic systems. Using a
hybrid prediction model leads to a mixed integer quadratic (or
linear) programming (MIQP or MILP) that can be solved using
available solvers (e.g. [14]).
2 Copyright © 2014 by ASME and General Motors
Hybrid model predictive control (hMPC) has received some
attention recently. Borrelli et al [15] used a mixed logical
dynamic model of the combined vehicle and tire system to
capture the main behavior of the internal combustion engine
and the wheel. The force developed in the tire contact patch is
approximated with a piece-wise affine function in terms of the
coefficient of friction and slip. The control problem is
augmented with constraints on engine torque and engine torque
gradient. The hybrid system consists of a continuous
vehicle/wheel model and an auxiliary binary variable which
indicates the region in the tire characteristic curve that is active
(tire characteristic curve is divided into two regions). Their goal
was to regulate the engine torque (by spark timing) so that the
wheel slip remains in the target zone where the traction force is
maximal.
The computational cost of MPC is an important factor that
limits its usage. In the explicit MPC, the programming problem
is solved offline for the initial states of the system using multi-
parametric programming (see [16]). In the final control law, the
control law is looked up from memory and control action is
calculated at each time step based on measurement of the
system states. Even though using explicit MPC greatly reduces
the online computational effort, it still requires considerable
memory space to store the offline solution. Some authors have
experimented with explicit version of MPC. For example,
Tondel and Johansen [17] used multi-parametric nonlinear
programming to solve the control allocation problem. They
assumed a high-level controller to produce the required yaw
moment based on the difference between the desired and actual
yaw rates. The control allocation unit then generates the
required torque by using brakes on individual wheels.
In this paper, a method is proposed to find an analytical closed
form solution for the designed MPC controller. The novelty of
this paper is that penalty functions are used to enforce the tire
force capacity constraints. The penalty function is embedded in
the objective function and becomes the dominant term in the
cost function when tires are about to slip. As a result, no
additional inequality constraints are required to enforce actuator
capacity.
This approach provides the opportunity to perform the
optimization task analytically. Therefore, a closed-form
solution can be obtained to eliminate any implementation
complexities. The performance of the designed model
predictive controller is compared with a similar non-predictive
controller numerically. The results show that model predictive
control can result in better performance during harsh driving
conditions where tire saturations occur.
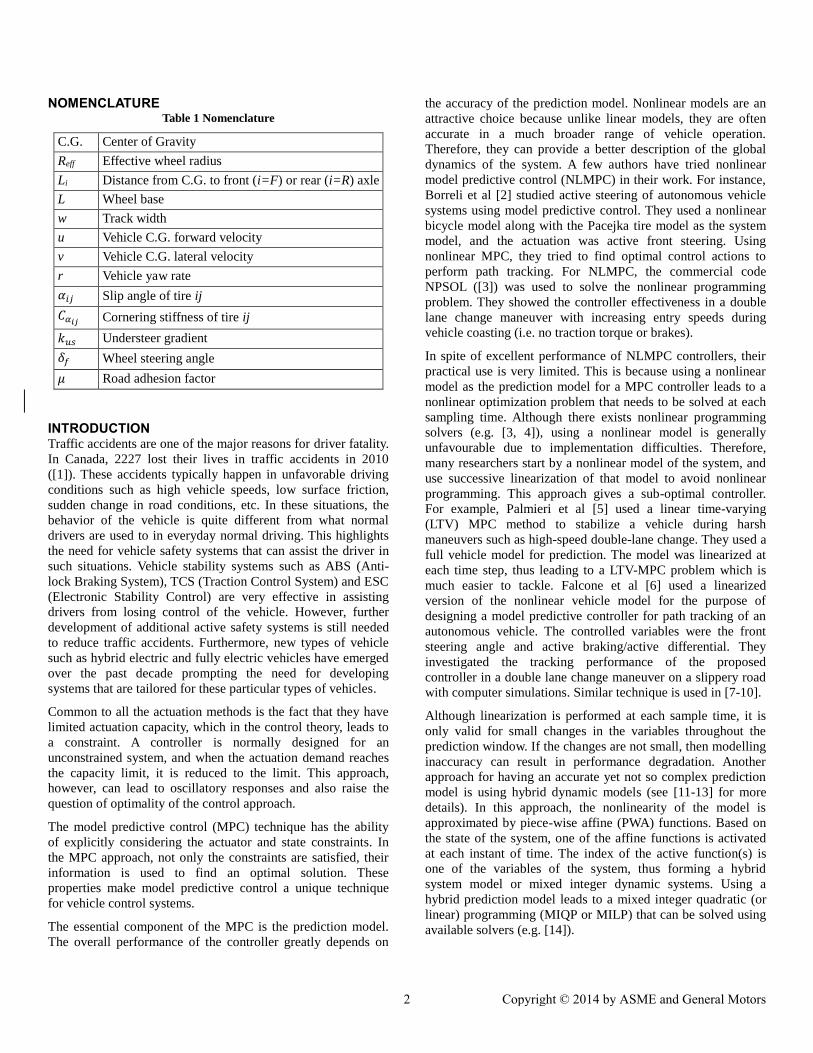
CONTROL STRUCTURE For a vehicle stability control system, a multi-layer control
structure is used. The control structure is shown in Figure 1. In
this figure, driver inputs are fed to the high-level controller.
This controller also receives information about the current
states of the vehicle and determines the target C.G. forces and
moments, F*CG, that can stabilize the vehicle. F*
CG is then
compared with the actual C.G. forces and moment, FCG, and the
optimal control action that minimizes the error E= F*CG -FCG is
determined in the low-level controller. The optimal control
action depends on the available actuators. In this study, it is
assumed that the only means of actuation is torque vectoring in
a four wheel drive vehicle. However, with only minor changes,
the controller can be applied to front/rear wheel drive vehicles.
Figure 1 Structure of the control loop.
CONTROLLER DESIGN
Non-Predictive Controller In the non-predictive low-level controller, the following
objective function is defined:
𝐽 = (𝑬 − 𝑨𝑓𝛿𝑭)𝑇
𝑾𝐸(𝑬 − 𝑨𝑓𝛿𝑭) + 𝛿𝑭𝑇𝑾𝑑𝑓𝛿𝑭
+ (𝑭 + 𝛿𝑭)𝑇𝑾𝐹(𝑭 + 𝛿𝑭) (1)
In Equation (1), E is the difference between the target and
actual C.G. forces and moments:
𝑬 = 𝑭𝑪𝑮∗ − 𝑭𝑪𝑮 = {
𝐹𝑥∗
𝐹𝑦∗
𝐺𝑧∗
} − {
𝐹𝑥
𝐹𝑦
𝐺𝑧 } (2)
Af is the Jacobian matrix that relates the change in tire forces to
the change in C.G. forces and moments. It can be defined as:
𝑨𝑓 = [
𝜕𝐹𝑥/𝜕𝐹𝐹𝐿 𝜕𝐹𝑥/𝜕𝐹𝐹𝑅
𝜕𝐹𝑦/𝜕𝐹𝐹𝐿 𝜕𝐹𝑦/𝜕𝐹𝐹𝑅
𝜕𝐺𝑧/𝜕𝐹𝐹𝐿 𝜕𝐺𝑧/𝜕𝐹𝐹𝑅
𝜕𝐹𝑥/𝜕𝐹𝑅𝐿 𝜕𝐹𝑥/𝜕𝐹𝑅𝑅
𝜕𝐹𝑦/𝜕𝐹𝑅𝐿 𝜕𝐹𝑦/𝜕𝐹𝑅𝑅
𝜕𝐺𝑧/𝜕𝐹𝑅𝐿 𝜕𝐺𝑧/𝜕𝐹𝑅𝑅
] (3)
F denotes tire longitudinal forces and δF stands for the change
in tire forces and moments:
𝑭 = [
𝐹𝐹𝐿
𝐹𝐹𝑅
𝐹𝑅𝐿
𝐹𝑅𝑅
] , 𝛿𝑭 = [
𝛿𝐹𝐹𝐿
𝛿𝐹𝐹𝑅
𝛿𝐹𝑅𝐿
𝛿𝐹𝑅𝑅
] (4)
WE and Wdf in Equation (1) are the weight matrices that are
tuned based on the trade-off between the tracking performance
(FCG*-FCG) and control effort (𝛿𝑭). The third term in Equation
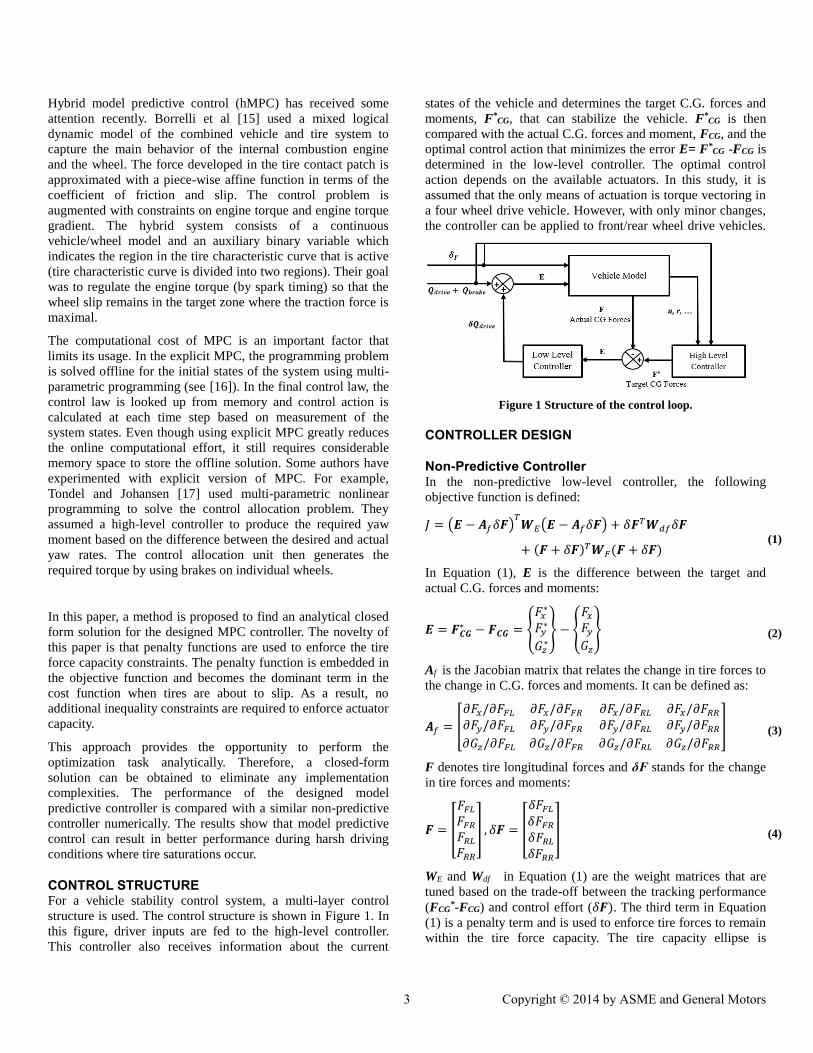
(1) is a penalty term and is used to enforce tire forces to remain
within the tire force capacity. The tire capacity ellipse is
3 Copyright © 2014 by ASME and General Motors
illustrated in Figure 2. The radii of the ellipse are the maximum
force that the tire can generate in its longitudinal and lateral
directions and are approximated by:
𝐹𝑥 = 𝜇𝑥𝐹𝑧, 𝐹𝑦 = 𝜇𝑦𝐹𝑧 (5)
In this study, it is assumed that a separate estimation scheme is
available to provide estimates of the tire forces and the friction
coefficient at each tire.
Figure 2 Tire force capacity ellipse.
The weight matrix WF depends on actual tire forces and relative
margin to the borders of the capacity ellipse in Figure 2. The
goal is to ensure WF remains small when tire forces are well
within the tire capacity, and it grows when the tire is about to
saturate. To this aim, the variable ρij is defined as:
𝜌𝑖𝑗2 = (
𝐹𝑥,𝑖𝑗
𝐹𝑥𝑚𝑎𝑥
)2
+ (𝐹𝑦,𝑖𝑗
𝐹𝑦𝑚𝑎𝑥
)
2
(6)
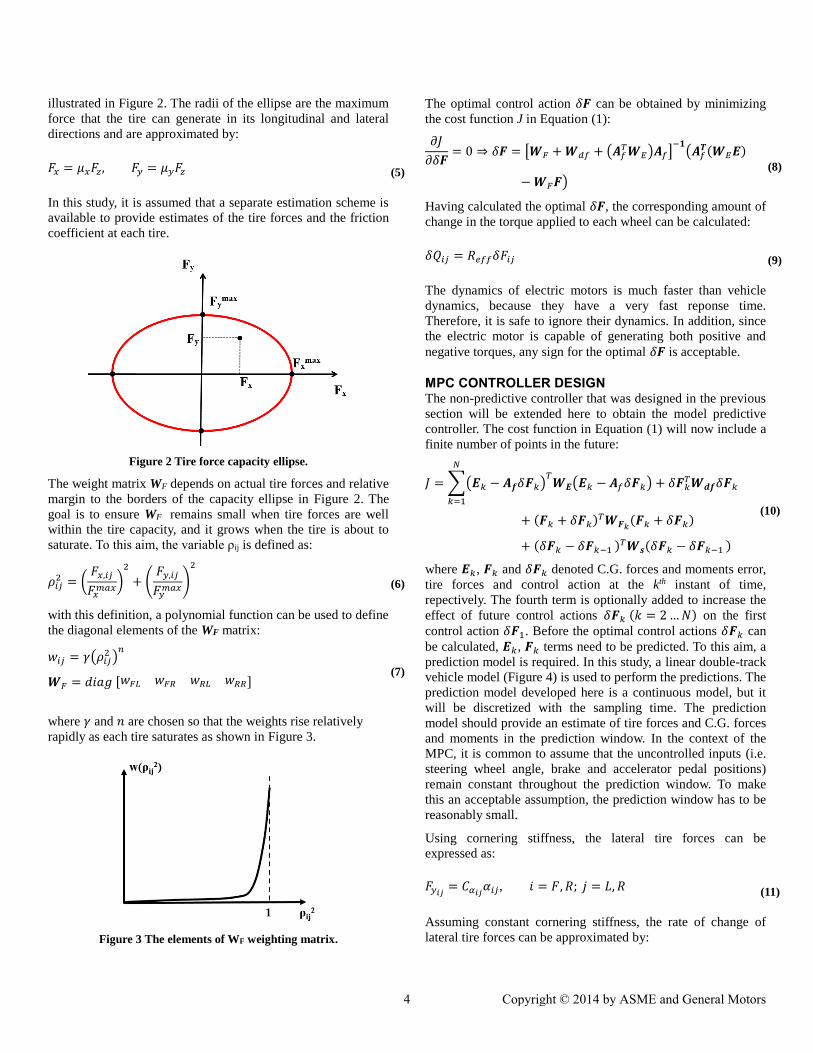
with this definition, a polynomial function can be used to define
the diagonal elements of the WF matrix:
𝑤𝑖𝑗 = 𝛾(𝜌𝑖𝑗2 )
𝑛
𝑾𝐹 = 𝑑𝑖𝑎𝑔 [𝑤𝐹𝐿 𝑤𝐹𝑅 𝑤𝑅𝐿 𝑤𝑅𝑅] (7)
where 𝛾 and 𝑛 are chosen so that the weights rise relatively
rapidly as each tire saturates as shown in Figure 3.
Figure 3 The elements of WF weighting matrix.
The optimal control action 𝛿𝑭 can be obtained by minimizing
the cost function J in Equation (1):
𝜕𝐽
𝜕𝛿𝑭= 0 ⇒ 𝛿𝑭 = [𝑾𝐹 + 𝑾𝑑𝑓 + (𝑨𝑓
𝑇𝑾𝐸)𝑨𝑓]−𝟏
(𝑨𝑓𝑻(𝑾𝐸𝑬)
− 𝑾𝐹𝑭) (8)
Having calculated the optimal 𝛿𝑭, the corresponding amount of
change in the torque applied to each wheel can be calculated:
𝛿𝑄𝑖𝑗 = 𝑅𝑒𝑓𝑓𝛿𝐹𝑖𝑗 (9)
The dynamics of electric motors is much faster than vehicle
dynamics, because they have a very fast reponse time.
Therefore, it is safe to ignore their dynamics. In addition, since
the electric motor is capable of generating both positive and
negative torques, any sign for the optimal 𝛿𝑭 is acceptable.
MPC CONTROLLER DESIGN The non-predictive controller that was designed in the previous
section will be extended here to obtain the model predictive
controller. The cost function in Equation (1) will now include a
finite number of points in the future:
𝐽 = ∑(𝑬𝑘 − 𝑨𝒇𝛿𝑭𝑘)𝑇
𝑾𝑬(𝑬𝑘 − 𝑨𝑓𝛿𝑭𝑘) + 𝛿𝑭𝑘𝑇𝑾𝒅𝒇𝛿𝑭𝑘
𝑁
𝑘=1
+ (𝑭𝑘 + 𝛿𝑭𝑘)𝑇𝑾𝑭𝑘(𝑭𝑘 + 𝛿𝑭𝑘)
+ (𝛿𝑭𝑘 − 𝛿𝑭𝑘−1 )𝑇𝑾𝒔(𝛿𝑭𝑘 − 𝛿𝑭𝑘−1 )
(10)
where 𝑬𝑘, 𝑭𝑘 and 𝛿𝑭𝑘 denoted C.G. forces and moments error,
tire forces and control action at the kth instant of time,
repectively. The fourth term is optionally added to increase the
effect of future control actions 𝛿𝑭𝑘 (𝑘 = 2 … 𝑁) on the first
control action 𝛿𝑭1. Before the optimal control actions 𝛿𝑭𝑘 can
be calculated, 𝑬𝑘, 𝑭𝑘 terms need to be predicted. To this aim, a
prediction model is required. In this study, a linear double-track
vehicle model (Figure 4) is used to perform the predictions. The
prediction model developed here is a continuous model, but it
will be discretized with the sampling time. The prediction
model should provide an estimate of tire forces and C.G. forces
and moments in the prediction window. In the context of the
MPC, it is common to assume that the uncontrolled inputs (i.e.
steering wheel angle, brake and accelerator pedal positions)
remain constant throughout the prediction window. To make
this an acceptable assumption, the prediction window has to be
reasonably small.
Using cornering stiffness, the lateral tire forces can be
expressed as:
𝐹𝑦𝑖𝑗= 𝐶𝛼𝑖𝑗
𝛼𝑖𝑗, 𝑖 = 𝐹, 𝑅; 𝑗 = 𝐿, 𝑅 (11)
Assuming constant cornering stiffness, the rate of change of
lateral tire forces can be approximated by:
4 Copyright © 2014 by ASME and General Motors

�̇�𝑦𝑖𝑗= 𝐶𝛼𝑖𝑗
�̇�𝑖𝑗 (12)
Considering only the effect of change in vehicle yaw rate, the
time rate of tire slip angles can be found as:
�̇�𝑖𝑗 =±
𝐿𝑖
𝑢
1 + (𝑣 ± 𝐿𝑖𝑟
𝑢)
2 �̇� (13)
Combining Equations (12) and (13), the change rate of tire
lateral forces can be found:
�̇�𝑦𝑖𝑗= 𝐶𝛼𝑖𝑗
±𝐿𝑖
𝑢
1 + (𝑣 ± 𝐿𝑖𝑟
𝑢)
2 �̇� (14)
Figure 4 Double-track vehicle model.
Therefore, having the current tire lateral forces (from a separate
estimation scheme), and calculating their time rate of these
forces using Equation (14), the future values of these forces can
be predicted.
Longitudinal tire forces are approximated as:
𝐹𝑥𝑖𝑗=
𝑄𝑖𝑗
𝑅𝑒𝑓𝑓
(15)
where Qij is the total torques exerted on the wheel ij. Writing
the balance of the moments acting on the vehicle gives:
(−𝑤
2𝑐𝑜𝑠𝛿𝑓 + 𝐿𝑓𝑠𝑖𝑛𝛿𝑓) 𝐹𝑥𝐹𝐿
+ (𝑤
2𝑠𝑖𝑛𝛿𝑓 + 𝐿𝑓𝑐𝑜𝑠𝛿𝑓) 𝐹𝑦𝐹𝐿
+
(𝑤
2𝑐𝑜𝑠𝛿𝑓 + 𝐿𝑓𝑠𝑖𝑛𝛿𝑓) 𝐹𝑥𝐹𝑅
+ (−𝑤
2𝑠𝑖𝑛𝛿𝑓 + 𝐿𝑓𝑐𝑜𝑠𝛿𝑓) 𝐹𝑦𝐹𝐿
+
−𝑤
2𝐹𝑥𝑅𝐿
− 𝐿𝑟𝐹𝑦𝑅𝐿+
𝑤
2𝐹𝑥𝑅𝑅
− 𝐿𝑟𝐹𝑦𝑅𝑅= 𝐼𝑧 �̇�
(16)
Equation (16) can be used to find the future values of vehicle
yaw rate and yaw moment.
Prediction of 𝑬𝑘 requires knowledge of 𝑭𝐶𝐺,𝑘∗ (i.e. future
outputs of the high-level controller). If this information is not
available, constant 𝑭𝐶𝐺,𝑘∗ assumption can be used. However,
estimation of 𝑭𝐶𝐺,𝑘∗ can significantly improve the performance
of the predictive controller.
In this study, since yaw stability is the main focus, 𝐺𝑧∗ is
predicted while 𝐹𝑥∗ and 𝐹𝑦
∗ are assumed constant in the
prediction window. A simple example of high-level control law
for yaw control is a proportional controller:
𝐺𝑧∗ = 𝑃(𝑟 − 𝑟𝑑) (17)
where P is the proportional gain and rd is the desired yaw rate
and is defined below:
𝑟∗ = 𝛿𝑓
𝑢
𝐿 + 𝑘𝑢𝑠𝑢2/𝑔
𝑟𝑑 = {
𝜇𝑔/𝑢 𝑟∗ > 𝜇𝑔/𝑢
𝑟∗ |𝑟∗| ≤ 𝜇𝑔/𝑢
−𝜇𝑔/𝑢 𝑟∗ < −𝜇𝑔/𝑢
(18)
The optimal control actions 𝛿𝑭𝑘∗ can be obtained by minimizing
the cost function in Equation (10) as:
𝜕𝐽
𝜕𝛿𝑭𝑘
= 0 ⇒
−𝑾𝑠𝛿𝑭𝑘−1 + (𝑨𝑓𝑇𝑾𝐸𝑨𝑓 + 𝑾𝑑𝑓 + 𝑾𝐹𝑘
+ 2𝑾𝑠)𝛿𝑭𝑘
− 𝑾𝑠𝛿𝑭𝑘+1 = 𝑨𝑓𝑇𝑾𝐸𝑬𝑘 − 𝑾𝐹𝑘
𝑭𝑘
(19)
Equation (19) comprises a set of linear algebraic equations that
can be solved to obtain 𝛿𝑭𝑘(𝑘 = 1 … 𝑁). Afterwards, 𝛿𝑭1 is
applied to the vehicle (using Equation (9)) and the rest are
discarded. This process is repeated at the next instant of time
with new measured signals. It can be seen that since penalty
functions are used to satisfy system constraints, no in-the-loop
optimization is required to find the optimal control action. This
significantly reduces the load on the processor.
SIMULATION RESULTS In this section, computer simulations in MATLAB Simulink
[18] are performed to evaluate the performance of the
predictive controller developed above. For the purpose of
simulation, CarSim software [19] is used to model a SUV
vehicle with properties listed in Table 2. The control loop
structure is the same as Figure 1, with the low-level controller
now being model predictive. The performance of the MPC and
Non-MPC controllers will be compared in two driving
maneuvers.
5 Copyright © 2014 by ASME and General Motors
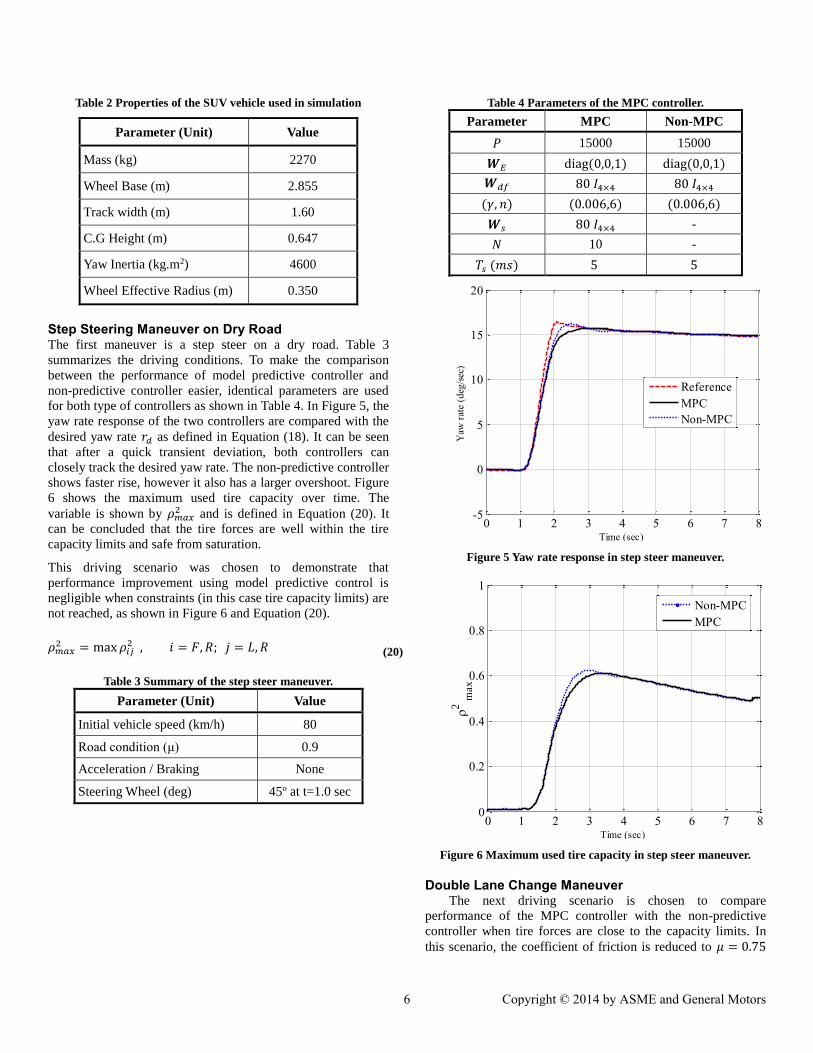
Table 2 Properties of the SUV vehicle used in simulation
Parameter (Unit) Value
Mass (kg) 2270
Wheel Base (m) 2.855
Track width (m) 1.60
C.G Height (m) 0.647
Yaw Inertia (kg.m2) 4600
Wheel Effective Radius (m) 0.350
Step Steering Maneuver on Dry Road The first maneuver is a step steer on a dry road. Table 3
summarizes the driving conditions. To make the comparison
between the performance of model predictive controller and
non-predictive controller easier, identical parameters are used
for both type of controllers as shown in Table 4. In Figure 5, the
yaw rate response of the two controllers are compared with the
desired yaw rate 𝑟𝑑 as defined in Equation (18). It can be seen
that after a quick transient deviation, both controllers can
closely track the desired yaw rate. The non-predictive controller
shows faster rise, however it also has a larger overshoot. Figure
6 shows the maximum used tire capacity over time. The
variable is shown by 𝜌𝑚𝑎𝑥2 and is defined in Equation (20). It
can be concluded that the tire forces are well within the tire
capacity limits and safe from saturation.
This driving scenario was chosen to demonstrate that
performance improvement using model predictive control is
negligible when constraints (in this case tire capacity limits) are
not reached, as shown in Figure 6 and Equation (20).
𝜌𝑚𝑎𝑥2 = max 𝜌𝑖𝑗
2 , 𝑖 = 𝐹, 𝑅; 𝑗 = 𝐿, 𝑅 (20)
Table 3 Summary of the step steer maneuver.
Parameter (Unit) Value
Initial vehicle speed (km/h) 80
Road condition (μ) 0.9
Acceleration / Braking None
Steering Wheel (deg) 45o at t=1.0 sec
Table 4 Parameters of the MPC controller.
Parameter MPC Non-MPC
𝑃 15000 15000
𝑾𝐸 diag(0,0,1) diag(0,0,1)
𝑾𝑑𝑓 80 𝐼4×4 80 𝐼4×4
(𝛾, 𝑛) (0.006,6) (0.006,6)
𝑾𝑠 80 𝐼4×4 -
𝑁 10 -
𝑇𝑠 (𝑚𝑠) 5 5
Figure 5 Yaw rate response in step steer maneuver.
Figure 6 Maximum used tire capacity in step steer maneuver.
Double Lane Change Maneuver The next driving scenario is chosen to compare
performance of the MPC controller with the non-predictive
controller when tire forces are close to the capacity limits. In
this scenario, the coefficient of friction is reduced to 𝜇 = 0.75
0 1 2 3 4 5 6 7 8-5
0
5
10
15
20
Time (sec)
Yaw
rat
e (d
eg/s
ec)
Reference
MPC
Non-MPC
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
Time (sec)
2 m
ax
Non-MPC
MPC
6 Copyright © 2014 by ASME and General Motors

and the CarSim driver model is used to perform the double lane
change maneuver. The driving conditions for this scenario are
summarized in Table 5.
Table 5 Summary of the double lane change maneuver
Parameter (Unit) Value
Entry speed (km/h) 95
Road condition (μ) 0.75
Acceleration / Braking None
Steering Wheel Controlled by
driver
Driver preview time (sec) 1.50
Driver lag time (sec) 0.0
The yaw rate and side slip angle responses of the vehicle are
shown in Figure 7. In the upper graph, it can be seen that the
MPC controller (solid curve) is able to closely track the desired
yaw rate (dashed curve), while with the non-predictive
controller (dotted curve), vehicle becomes unstable after 𝑡 =5.5 𝑠𝑒𝑐. In the lower graph, the side slip angle of the vehicle is
shown. It can be observed that when the controller is not
predictive (dotted curve), the vehicle exhibits much larger side
slip angles especially after the second lane change. When MPC
controller is active, the side slip angle remains smaller than 4
degrees (𝛽 < 4𝑜).
Figure 7 Yaw rate and side slip angle in double lane change
maneuver.
In Figure 8, the maximum used tire capacity for each controller
is shown. Comparison between the two curves reveal that the
model predictive controller can keep the tire forces within the
capacity limits of the tires, whereas the non-predictive
controller is not able to avoid tire saturation. This is because the
MPC controller is able to anticipate the tire saturation in
advance and choose the proper control action so that the tire
saturation (and consequently vehicle skid) is avoided. Figure 9
shows the trajectory of the vehicle C.G. in each case. It can be
seen that the vehicle using non-predictive controller becomes
unstable after the second lane change.
Figure 8 Maximum used tire capacity in double lane change
maneuver.
Figure 9 Vehicle path in double lane change maneuver.
CONCLUSION In this paper, a model predictive controller was designed to
control the stability of electric vehicles. The designed controller
can be easily applied to front/rear and all wheel drive vehicles.
To obtain a closed-form solution for the MPC problem, tire
capacity limits were treated as a penalty function. A linear
double-track vehicle model was used to predict the vehicle yaw
rate and yaw moment as well as tire forces in the prediction
window. The performance of the designed controller was
compared with a similar but non-predictive controller. Through
computer simulations, it was observed that the performance of
0 1 2 3 4 5 6 7 8-40
-20
0
20
40
60
Yaw
rat
e (d
eg/s
)
0 1 2 3 4 5 6 7 8-30
-20
-10
0
10
Time (sec)
(
deg
)
Reference
MPC
Non-MPC
MPC
Non-MPC
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
Time (sec)
m
ax 2
MPC
Non-MPC
0 50 100 150 200 250-3
-2
-1
0
1
2
3
4
5
6
X (m)
Y (
m)
Non-MPC
MPC
Reference
7 Copyright © 2014 by ASME and General Motors
the MPC controller is better than the non-predictive controller
in driving maneuvers that most of the tire force capacity is
needed.
ACKNOWLEDGMENTS The authors would like to acknowledge the financial support of
Automotive Partnership Canada, Ontario Research Fund, and
financial and technical support of General Motors.
REFERENCES
[1] Transport Canada, 2010, "Canadian Motor Vehicle Traffic
Collision Statistics," .
[2] Borrelli, F., Falcone, P., Keviczky, T., 2005, "MPC-Based
Approach to Active Steering for Autonomous Vehicle
Systems," International Journal of Vehicle Autonomous
Systems, 3(2) pp. 265-291.
[3] Gill, P., Murray, W., Saunders, M., 1998, "NPSOL–
Nonlinear Programming Software," Mountain View, CA, .
[4] Gill, P. E., Murray, W., and Saunders, M. A., 2002,
"SNOPT: An SQP Algorithm for Large-Scale Constrained
Optimization," SIAM Journal on Optimization, 12(4) pp. 979-
1006.
[5] Palmieri, G., Barbarisi, O., Scala, S., 2009, "A preliminary
study to integrate LTV-MPC Lateral Vehicle Dynamics Control
with a Slip Control," Decision and Control, 2009 held jointly
with the 2009 28th Chinese Control Conference. CDC/CCC
2009. Proceedings of the 48th IEEE Conference on,
Anonymous IEEE, pp. 4625-4630.
[6] Falcone, P., Tufo, M., Borrelli, F., 2007, "A linear time
varying model predictive control approach to the integrated
vehicle dynamics control problem in autonomous systems,"
Decision and Control, 2007 46th IEEE Conference on,
Anonymous pp. 2980-2985.
[7] Turri, V., Carvalho, A., Tseng, H., 2013, "Linear Model
Predictive Control for Lane Keeping and Obstacle Avoidance
on Low Curvature Roads," .
[8] Barbarisi, O., Palmieri, G., Scala, S., 2009, "LTV-MPC for
Yaw Rate Control and Side Slip Control with Dynamically
Constrained Differential Braking," European Journal of
Control, 15(3) pp. 468-479.
[9] Falcone, P., Borrelli, F., Tseng, H. E., 2008, "Linear
Time‐ varying Model Predictive Control and its Application to
Active Steering Systems: Stability Analysis and Experimental
Validation," International Journal of Robust and Nonlinear
Control, 18(8) pp. 862-875.
[10] Anwar, S., 2005, "Generalized Predictive Control of Yaw
Dynamics of a Hybrid Brake-by-Wire Equipped Vehicle,"
Mechatronics, 15(9) pp. 1089-1108.
[11] Camacho, E.F., and Alba, C.B., 2013, "Model predictive
control," Springer, .
[12] Morari, M., Baotic, M., and Borrelli, F., 2003, "Hybrid
Systems Modeling and Control," European Journal of Control,
9(2) pp. 177-189.
[13] Borrelli, F., Bemporad, A., and Morari, M., 2011,
"Predictive Control for Linear and Hybrid Systems," Prepation,
Draft Available at Http://Www.Me.Berkeley.Edu/Frborrel, .
[14] Cplex, I., 2007, "11.0 User’s Manual," ILOG SA,
Gentilly, France, .
[15] Borrelli, F., Bemporad, A., Fodor, M., 2006, "An
MPC/Hybrid System Approach to Traction Control," Control
Systems Technology, IEEE Transactions On, 14(3) pp. 541-
552.
[16] Pistikopoulos, E.N., Georgiadis, M.C., and Dua, V., 2007,
"Multi-parametric programming: theory, algorithms, and
applications," Wiley-VCH, .
[17] Tondel, P., and Johansen, T., 2005, "Control allocation for
yaw stabilization in automotive vehicles using multiparametric
nonlinear programming," Proceedings of the American Control
Conference, Anonymous Citeseer, 1, pp. 453.
[18] The Mathworks Inc., 2012, "MATLAB and Simulink
Toolbox," .
[19] Mechanical Simulation, 2011, "CarSim Users Manual," .
8 Copyright © 2014 by ASME and General Motors