constant-time lca retrieval presentation by danny hermelin, string matching algorithms seminar,...
TRANSCRIPT
Constant-Time LCA Retrieval
Presentation by Danny Hermelin,
String Matching Algorithms Seminar,
Haifa University.
The Lowest Common Ancestor In a rooted tree T, a node u is an ancestor
of a node v if u is on the unique path from the root to v.
In a rooted tree T, the Lowest Common Ancestor (LCA) of two nodes u and v is the deepest node in T that is the ancestor of both u and v.
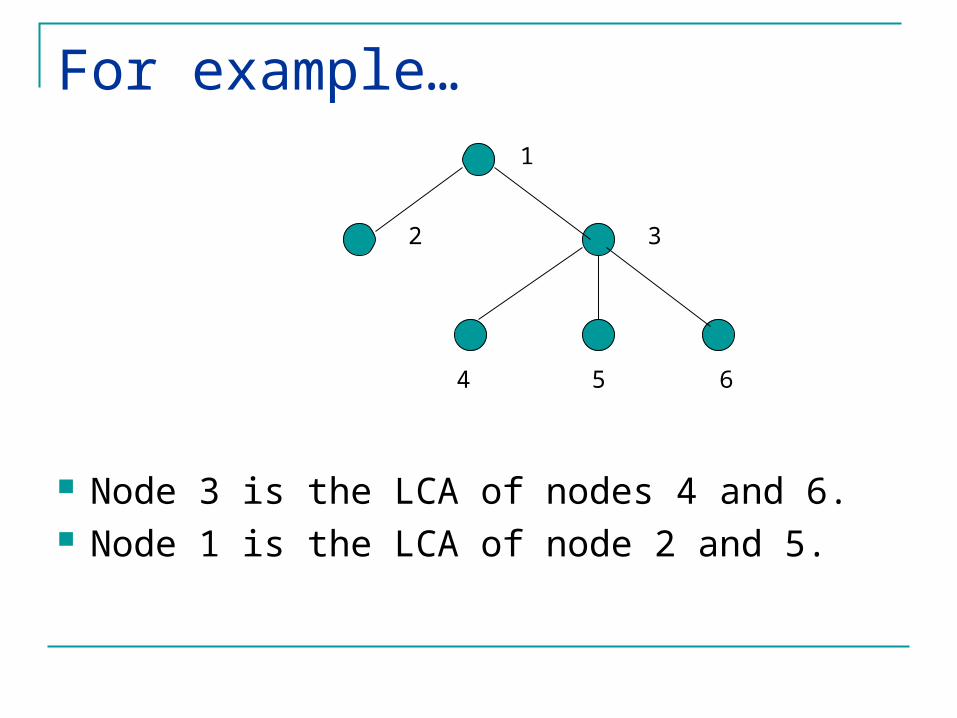
For example…
Node 3 is the LCA of nodes 4 and 6. Node 1 is the LCA of node 2 and 5.
1
2 3
4 5 6
The LCA problem is then, given a rooted tree T for preprocessing, preprocess it in a way so that the LCA of any two given nodes in T can be retrieved in constant time.
In this presentation we shall present a preprocessing algorithm that requires no more then linear time and space complexity.
The LCA Problem
The assumed machine modelWe make the following two assumptions on our computational model.
Let n denote the size of our input in unary representation:
All arithmetic, comparative and logical operations on numbers whose binary representation is of size no more then logn bits can be done in constant time.
We assume that finding the left-most bit or the right-most bit of a logn sized number can be done in constant time.
The first assumption is a very reasonable straightforward assumption considering most machines on the market today.
The second seems less reasonable but can be achieved with the help of a few (constant numbered) tables of size O( n ).
These assumptions helps our discussion focus on the more interesting parts of the algorithm solving the LCA problem.
The Simple case:Complete Binary Tree
Our discussion begins with a particularly simple instance of the LCA problem, LCA queries on complete binary trees.
We will use our knowledge of solving the LCA problem on complete binary trees and expand it later on, to solve the LCA problem on any arbitrary rooted tree T.
Let B denote a complete binary tree with n nodes.
The key here is to encode the unique path from the root to a node in the node itself. We assign each node a path number, a logn bit number that encodes the unique path from the root to the node.
The Path NumberFor each node v in B we encode a path number in the following way:
Counting from the left most bit, the i’th bit of the path number for v corresponds to the i’th edge on the path from the root to v.
A 0 for the i’th bit from the left indicates that the i’th edge on the path goes to a left child, and a 1 indicates that it goes to a right child.
Let k denote then number of edges on the path from the root to v, then we mark the k+1 bit (the height bit) of the path number 1, and the rest of the logn-k-1 bits 0.
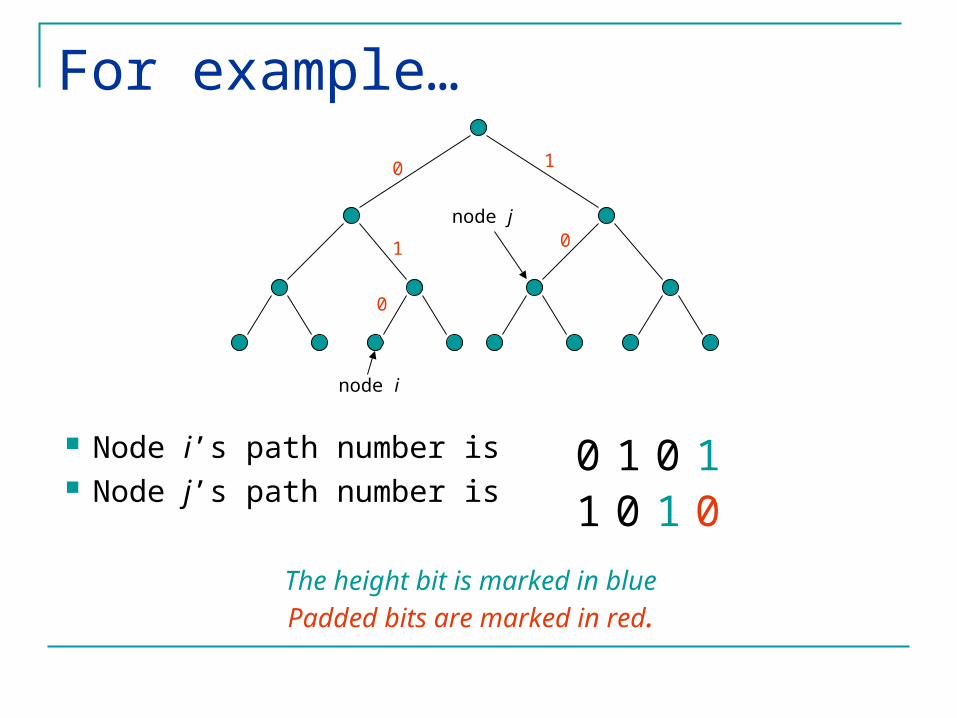
For example…
Node i’s path number is Node j’s path number is
node i
1
node j
0 01
10 1 0
The height bit is marked in bluePadded bits are marked in red.
0
0
1 0
1
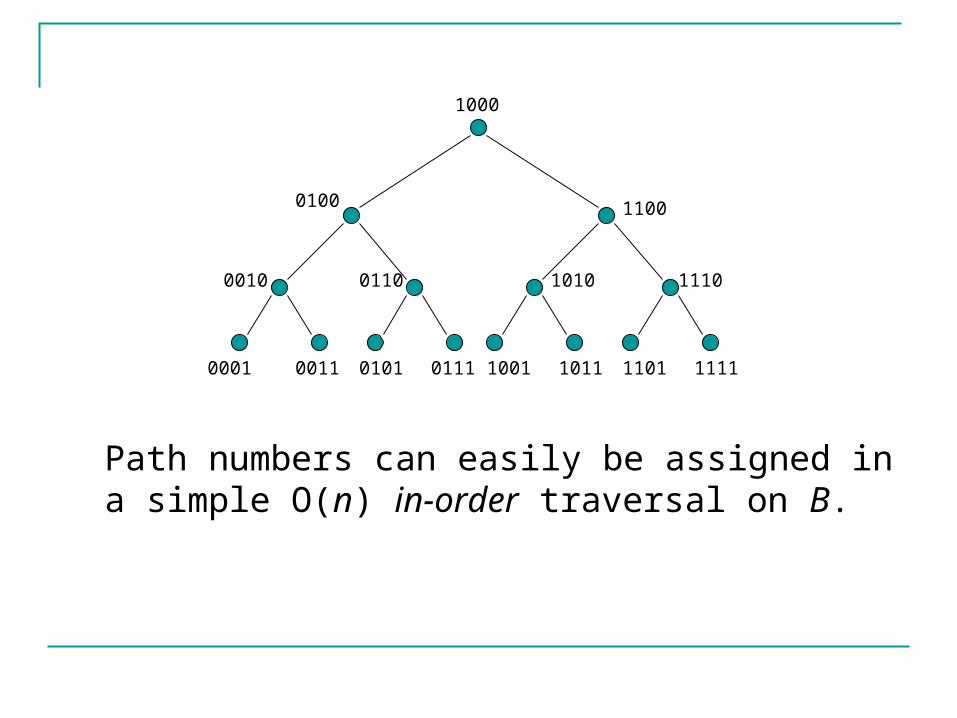
Path numbers can easily be assigned in a simple O(n) in-order traversal on B.
0001 0011
0010
0101
1000
0100
0111
0110
1001
1010
1011
1100
1101
1110
1111
How do we solve LCA queries in B Suppose now that u and v are two nodes in B, and
that path(u) and path(v) are their appropriate path numbers.
We denote the lowest common ancestor of u and v as lca(u,v).
We denote the prefix bits in the path number, those that correspond to edges on the path from the root, as the path bits of the path number.
First we calculate path(u) XOR path(v) and find the left most bit which equals 1.
If there is no such bit than path(u) = path(v) and so u = v, so assume that the k’th bit of the result is 1.
If both the k’th bit in path(u) and the k’th bit in path(v) are path bits, then this means that u and v agree on k-1 edges of their path from the root, meaning that the k-1 prefix of each node’s path number encodes within it the path from the root to lca(u,v).
0010
0100
0111
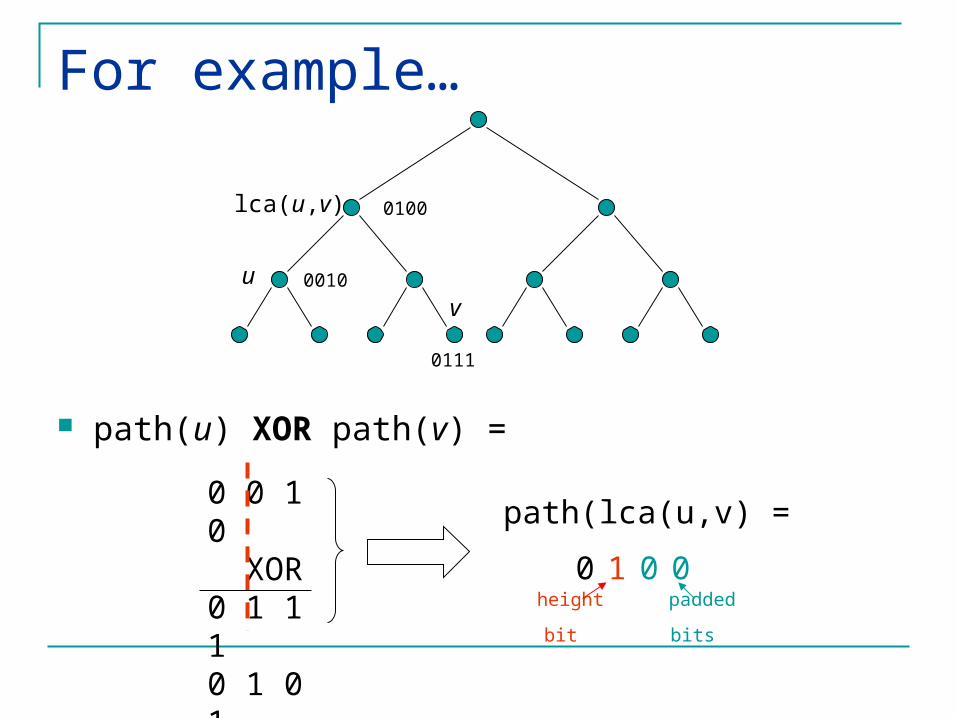
For example…
path(u) XOR path(v) =
uv
lca(u,v)
0 0 1 0 XOR0 1 1 1 0 1 0 1
path(lca(u,v) =
0 1 0 0height bit padded bits
1001
1010
1011
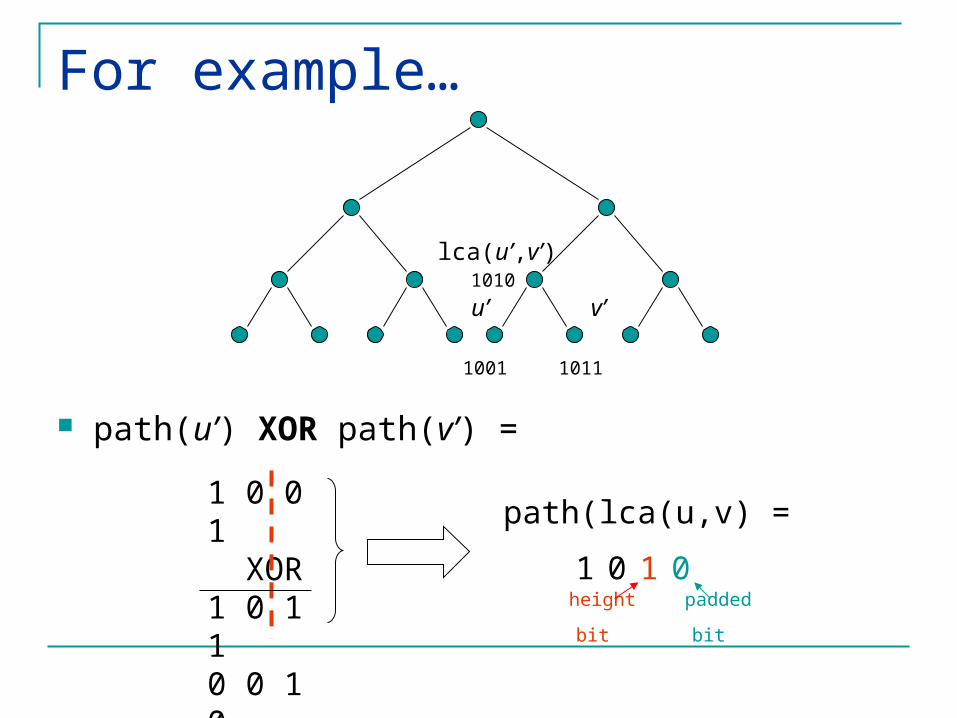
For example…
path(u’) XOR path(v’) =
u’ v’
lca(u’,v’)
1 0 0 1 XOR1 0 1 1 0 0 1 0
path(lca(u,v) =
1 0 1 0height bit padded bit
This concludes that if we take the prefix k-1 bits of the result of path(u) XOR path(v), add 1 as the k’th bit, and pad logn-k 0 suffix bits, we get path(lca(u,v)).
If either the k’th bit in path(u) or the k’th bit in path(v) (or both) is not a path bit then one node is ancestor to the other, and lca(u,v) can easily be retrieved by comparing path(u) and path(v)’s height bit.
The general LCA algorithm
The following are the two stages of the general LCA algorithm for any arbitrary tree T:
First, we reduce the LCA problem to the Restricted Range Minima problem. The Restricted Range Minima problem is the problem of finding the smallest number in an interval of a fixed list of numbers, where the difference between two successive numbers in the list is exactly one.
Second, we solve the Restricted Range Minima problem and thus solve the LCA problem.
The Reduction Let T denote an arbitrary tree Let lca(u,v) denote the lowest common ancestor
of nodes u and v in T. First we execute a depth-first traversal of T to label
the nodes in the depth-first order they are encountered.
In that same traversal we maintain a list L, of nodes of T, in the same order that they were visited.
The only property of the depth-first numbering we need is that the number given to any node is smaller then the number given to any of it’s descendents.
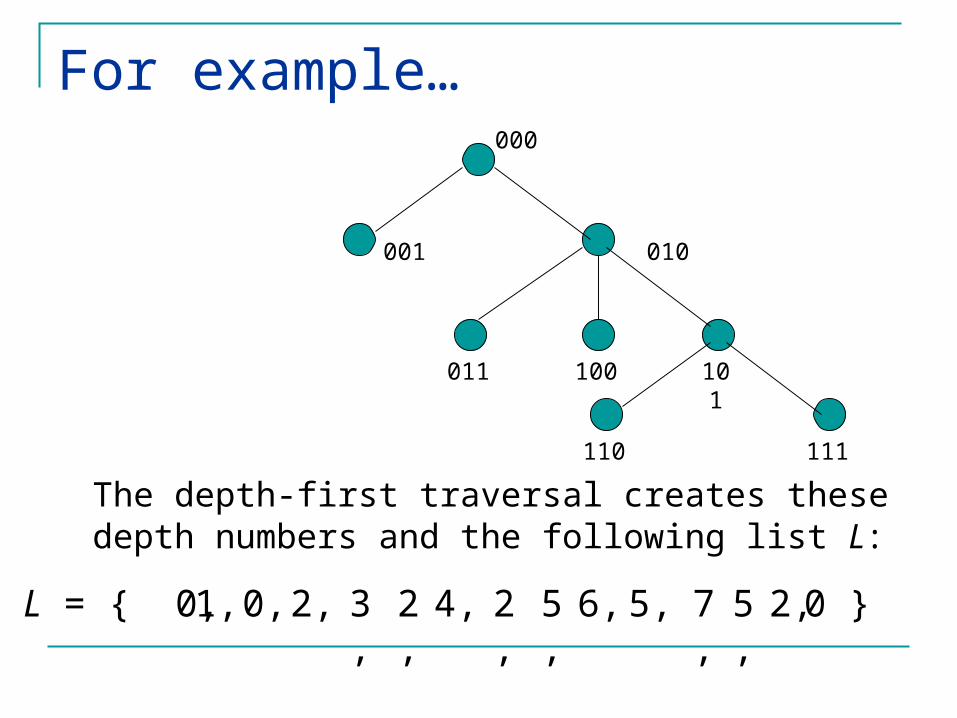
The depth-first traversal creates these depth numbers and the following list L:
For example…000
001 010
011 100 101
111110
L = { 0, 1, 0, 2, 3, 2, 4, 2, 5, 6, 5, 7, 5, 2, 0 }
Now if want to find lca(u,v), we find the first occurrence of the two nodes in L, this defines an interval I in L.
Suppose u occurs in L before v. Now, I describes the part of the traversal, from the point we first discovered u to the point we first discovered v.
lca(u,v) can be retrieved by finding the minimum number in I.
This is due to the following two simple facts:
If u is an ancestor of v then all those nodes visited between u and v are in u’s subtree, and thus the depth-number assigned to u is minimal in I.
If u is not an ancestor of v, then all those nodes visited between u and v are in lca(u,v)’s subtree, and the traversal must visit lca(u,v). Thus the minimum of I is the depth-number assigned to lca(u,v).
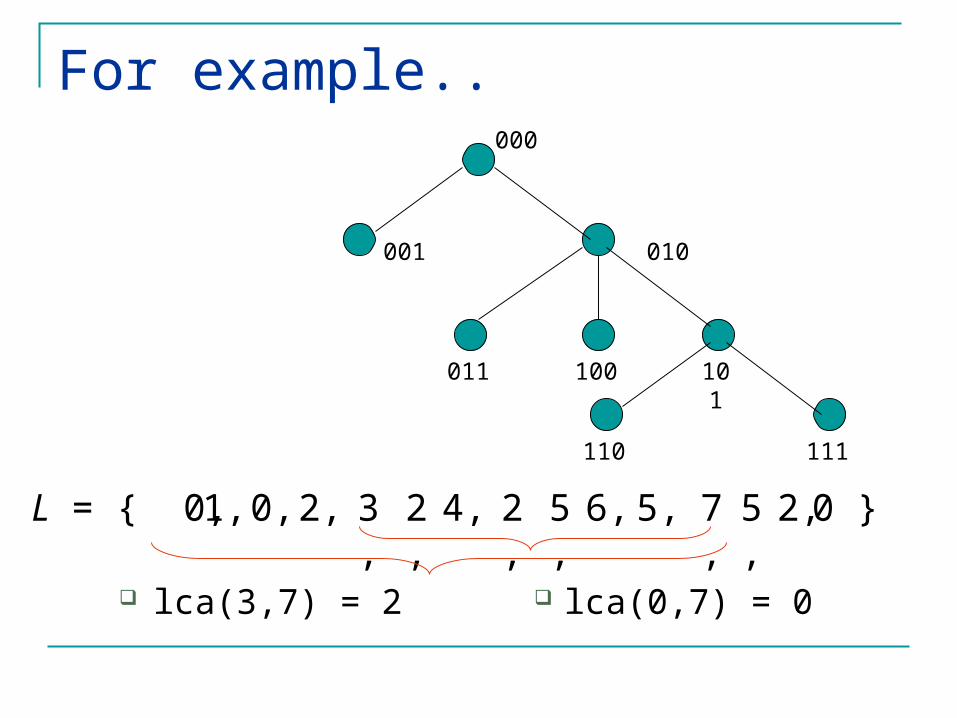
lca(3,7) = 2
For example..000
001 010
011 100 101
111110
L = { 0, 1, 0, 2, 3, 2, 4, 2, 5, 6, 5, 7, 5, 2, 0 }
lca(0,7) = 0
The Restricted Reduction
So far we’ve shown how to reduce the LCA problem to the range minima problem. This next step shows how to achieve reduction to the restricted range minima problem.
Denote level(u) as the number of edges in the unique path from the root to node u in T.
If L = { l1, l2, … , lz } then we build the following list :
L’={level(l1),level(l2),…level(lz)}.
We use L’ in the same manner we used L in the previous reduction scheme.
This works because in every interval I = [u,v] in L, lca(u,v) is the lowest node in I for the same reasons mentioned earlier.
The difference between two adjacent elements in L’ is exactly one.
This completes the reduction to the restricted range minima problem.
The reduction complexity.
Denote n as the number of nodes in T.
Depth-first traversal can be done in O( n ) space and time complexity.
L is of size O( n ) and thus it’s creation and initialization can be done in O( n ) space and time complexity.
To find lca(u,v) we need the first occurrence of u and v in L. This could be stored in a table of size O( n ). Thus the creation and initialization of this table can be done in O( n ) space and time complexity.
The total space and time complexity of the reduction is then O( n ).
The Range Minima Problem
The Range Minima problem is the problem of finding the smallest number in an interval of a fixed list of numbers.
The Restricted Range Minima problem is an instance of the Range Minima problem where the difference between two successive numbers is exactly one.
More Formally…
The Restricted Range Minima problem is stated formally in the following:
Given a list L = { l1 , l2 , … , ln } of n real numbers, where for each i = 1… n-1 : | li - li+1 | = 1, preprocess the list so that for any interval [ li , li+1 , … , lj ] ,
1 i < j n, the minimum over the interval can be retrieved in constant time.
Two preprocessing methods for the Range Minima Problem…
The algorithm for solving the Range Minima problem uses two preprocessing methods:
Procedure I uses no assumptions regarding the difference between adjacent elements, and requires O(nlogn) space and time complexity.
Procedure II uses the restricted assumption regarding adjacent elements, and requires exponential space and time complexity.
Procedure I
Suppose that our list L is of size n, and for convenience purposes suppose n is a power of 2.The procedure has two main stages:
First, build a complete binary tree B of size 2n-1 with n leaves. Then for i from 1 to n, record the i’th element of L at leaf i.
Second, for each internal node (not a leaf) in B, maintain a suffix-list and a prefix-list containing all prefix minima and suffix minima with respect to the leaves in it’s subtree.
A prefix list of an internal node v in B is a list of size equal to the number of leaves in v’s subtree. The k’th entry in the list is then the smallest number among the numbers represented by the first consecutive k leaves in v’s subtree.
Likewise, a suffix list of v has the same size and the k’th entry in it contains the smallest number among the numbers represented by the last consecutive |Lv| - k +1 leaves in v’s subtree.
Let |Lv| denote the number of nodes in the subtree rooted by node v which is internal in B.
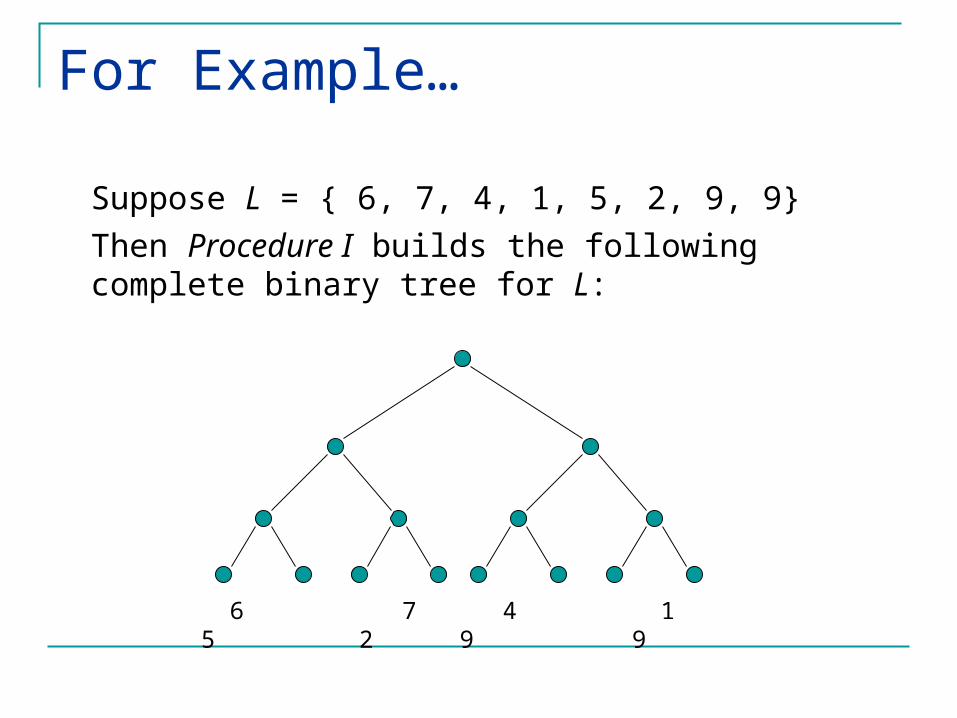
For Example…
Suppose L = { 6, 7, 4, 1, 5, 2, 9, 9}
Then Procedure I builds the following complete binary tree for L:
6 7 4 1 5 2 9 9
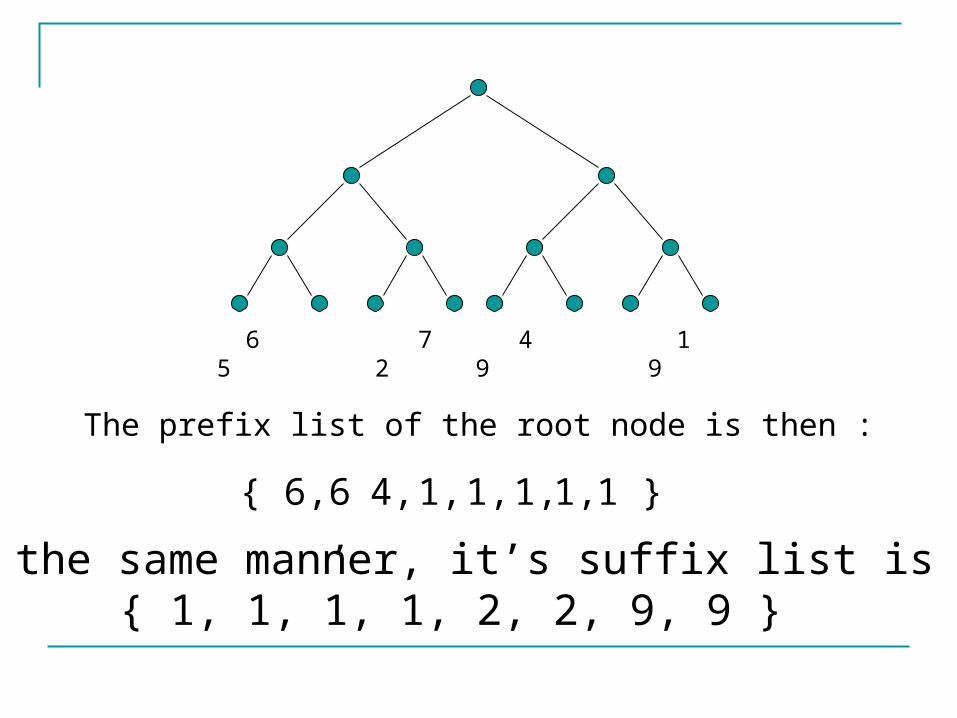
The prefix list of the root node is then :
6 7 4 1 5 2 9 9
{ 6, 6, 4, 1, 1, 1, 1, 1 }
In the same manner, it’s suffix list is :{ 1, 1, 1, 1, 2, 2, 9, 9 }
After the preprocessing stages are complete, the smallest number in any interval [u,v] can be found in constant time as follows:
First find the LCA of u and v and call it z. Recall, we already know how to answer LCA quarries in complete binary trees, in constant time.
The minima is then the minimum between the value of z’s left child’s suffix list at entry u, and z’s right child’s prefix list at entry v.
Finding the Range Minima
For Example…
Suppose I = { 4, 1, 5, 2 }.
The endpoints of I, 4 and 2, are leaves in B who’s LCA is the root node.
Denote the root’s left son as left and the root’s right son as right.
Leaf 4 is then,the third leaf from the left in left’s subtree and leaf 2 is the second leaf from the left in right’s subtree.
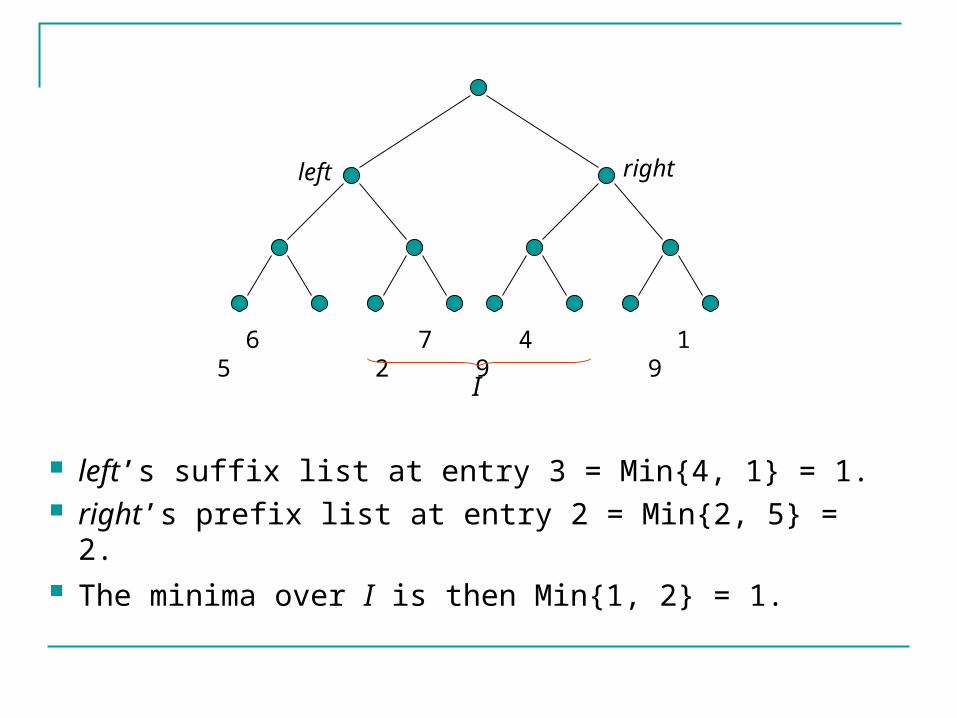
left’s suffix list at entry 3 = Min{4, 1} = 1. right’s prefix list at entry 2 = Min{2, 5} = 2. The minima over I is then Min{1, 2} = 1.
6 7 4 1 5 2 9 9
left right
I
Procedure I clearly requires O(nlogn) time and space complexity. This is a result of these two simple facts:
The total size of all the prefix and suffix lists of all the internal nodes of B is O(nlogn).
Each entry in these list requires constant time to calculate if we use simple dynamic programming techniques.
Procedure II
Procedure II use’s the assumption that the difference between any two adjacent elements of L is exactly one. We assume without loss of generality that the first element of L is zero (since, otherwise, we can subtract from every element in L the value of the first element, and then add it to the range-minima result).
The procedure runs in two main stages:
First, a table is built with 2n-1 entries in it. Each entry in this table represents a valid instance of L, and is a reference to a particular subtable.
Second, in each subtable we store the answer to each of the n(n-1)/2 possible range queries.
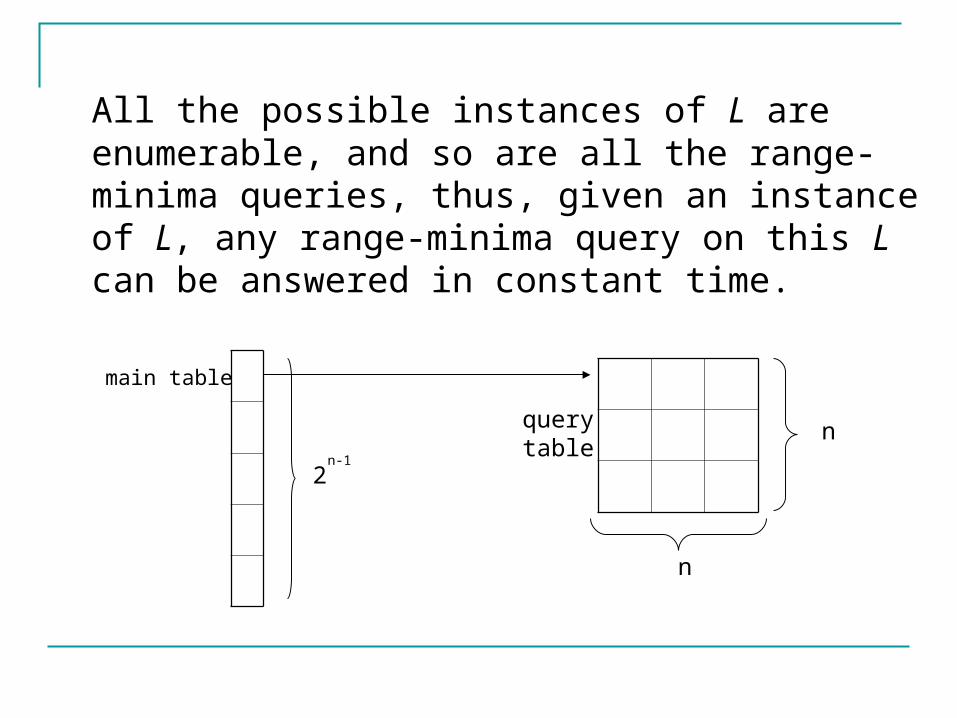
All the possible instances of L are enumerable, and so are all the range-minima queries, thus, given an instance of L, any range-minima query on this L can be answered in constant time.
2n-1
n
n
main table
querytable
It is easy to see then, that Procedure II uses O( ) space and time complexity.2
nn 2
We shall now demonstrate how with the useof Procedure I and Procedure II we achieve linear time and space preprocessing in order to answer all range-minima queries on L.
The Restricted Range-Minima preprocessing algorithm
Our algorithm runs in three stages:
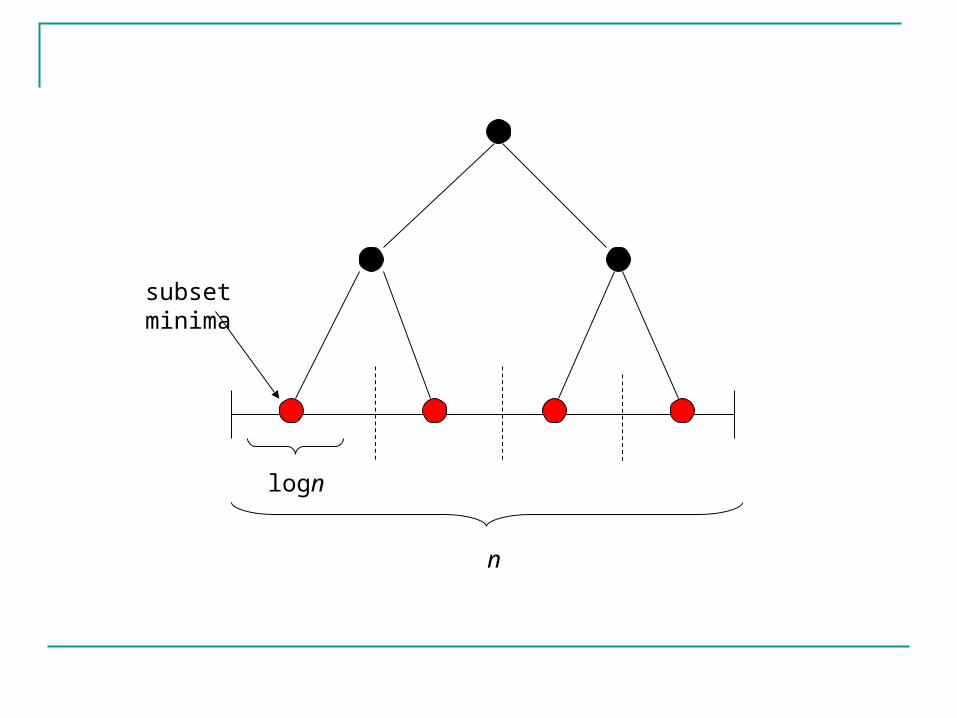
1. First we partition L into logn sized subsets, giving us a total of n/logn subsets of this kind. We apply Procedure I to an array of all the minimums of these subsets.
logn
subset minima
n
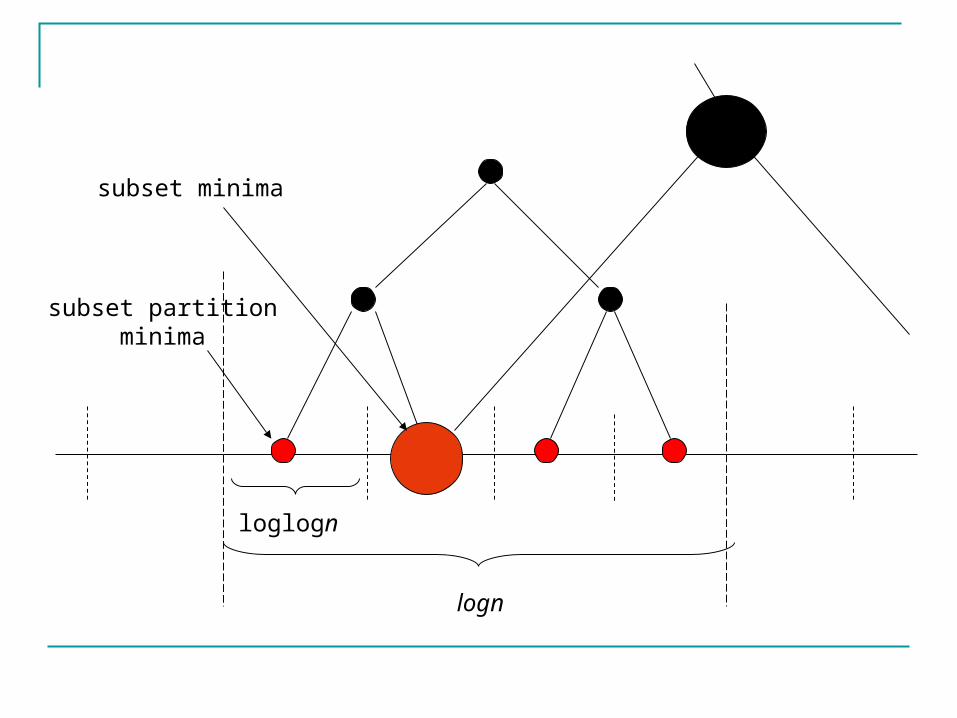
2. Furthermore, each subset of size logn we partition into smaller subsets of size loglogngiving us logn/loglogn partitions in each subset. Again we apply Procedure I to an array of all the minimums of these loglogn partitions.
loglogn
logn
subset partitionminima
subset minima
3. Finally, we run Procedure II to build the table required for any array of size loglogn. For each subset partition we identify it’s proper entry in our table.
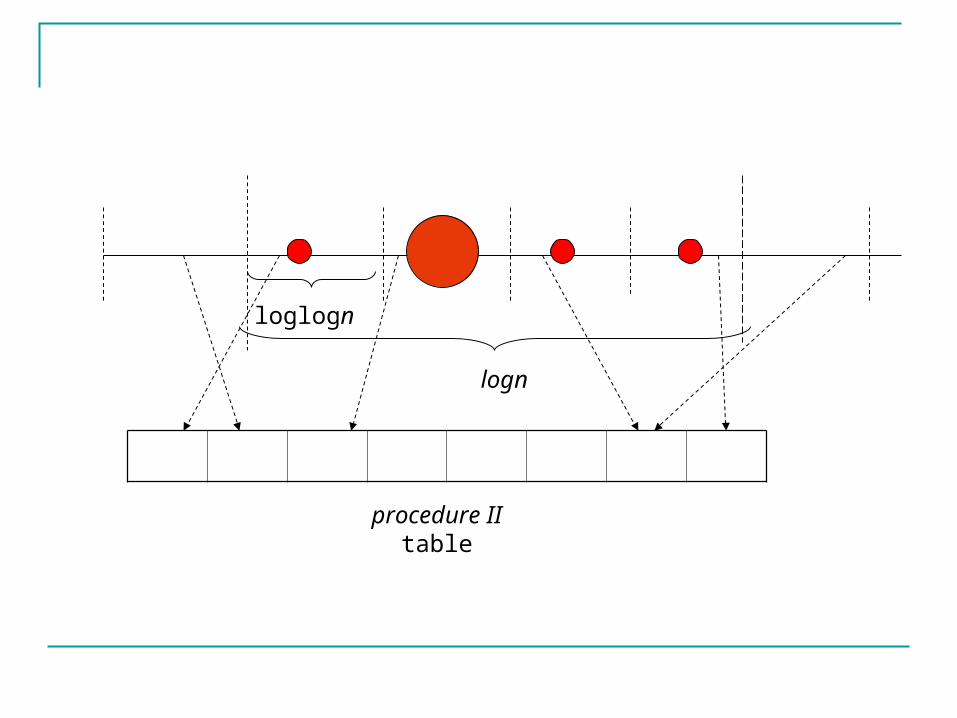
loglogn
logn
procedure IItable
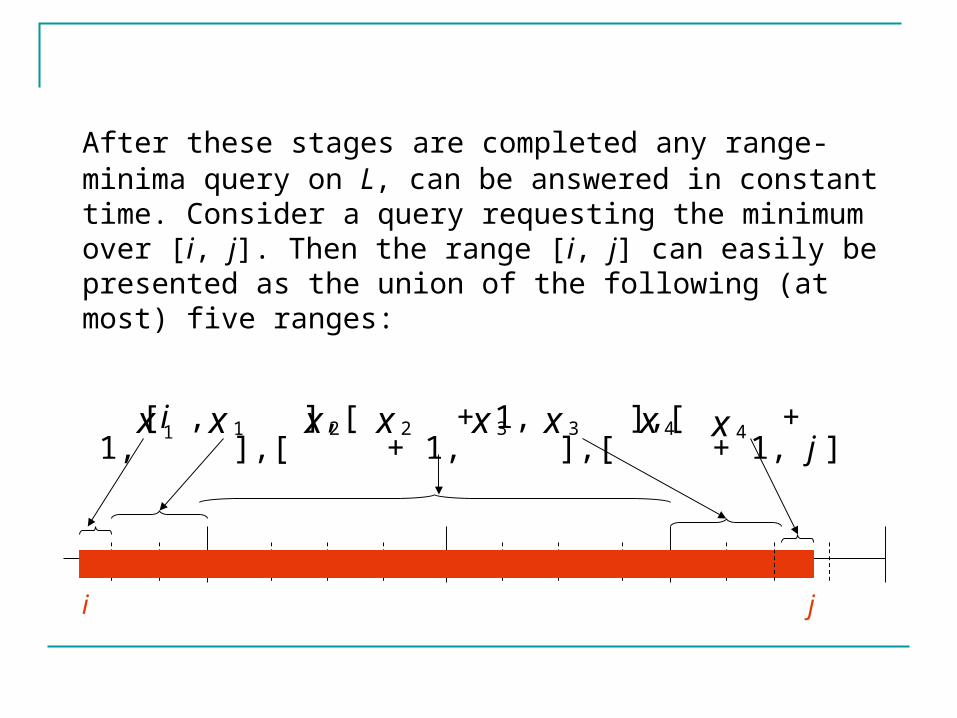
After these stages are completed any range-minima query on L, can be answered in constant time. Consider a query requesting the minimum over [i, j]. Then the range [i, j] can easily be presented as the union of the following (at most) five ranges:
xx 1 2 x3x1 x2 x3 x4
i j
[i , ],[ + 1, ],[ + 1, ],[ + 1, ],[ + 1, j ]x4
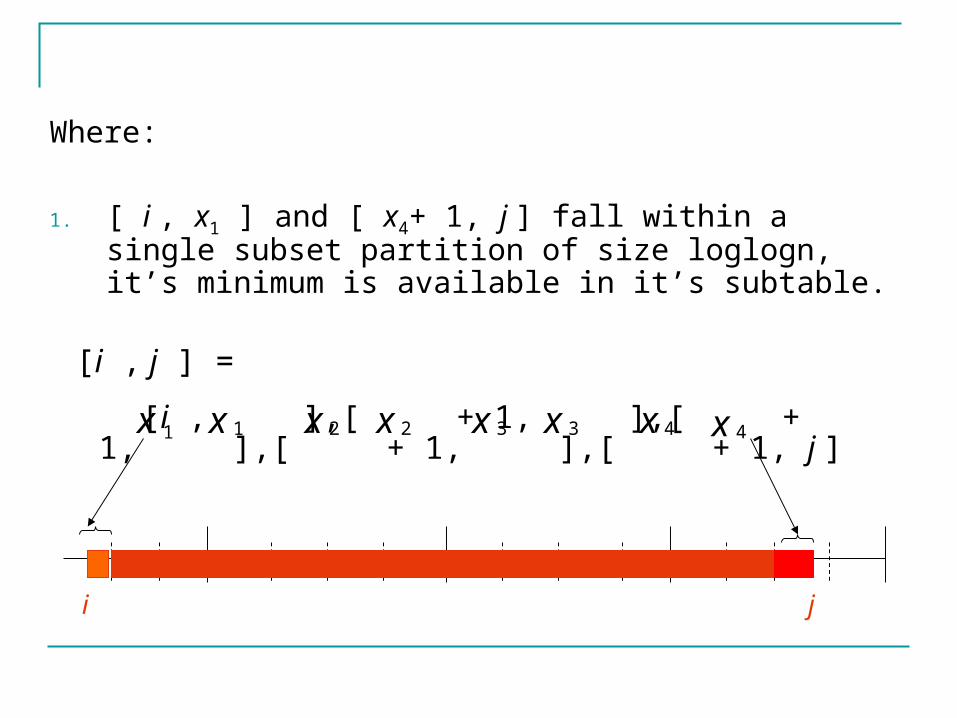
Where:
1. [ i , x1 ] and [ x4+ 1, j ] fall within a single subset partition of size loglogn, it’s minimum is available in it’s subtable.
xx 1 2 x3x1 x2 x3 x4
i j
[i , ],[ + 1, ],[ + 1, ],[ + 1, ],[ + 1, j ]x4
[i , j ] =
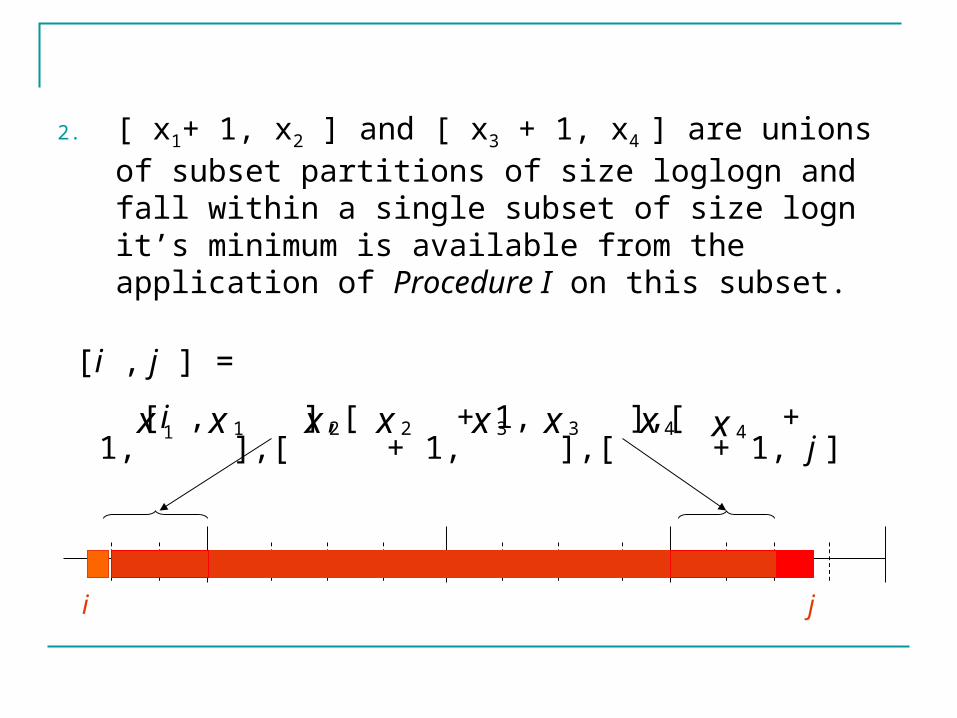
2. [ x1+ 1, x2 ] and [ x3 + 1, x4 ] are unions of subset partitions of size loglogn and fall within a single subset of size logn it’s minimum is available from the application of Procedure I on this subset.
xx 1 2 x3x1 x2 x3 x4
i j
[i , ],[ + 1, ],[ + 1, ],[ + 1, ],[ + 1, j ]x4
[i , j ] =
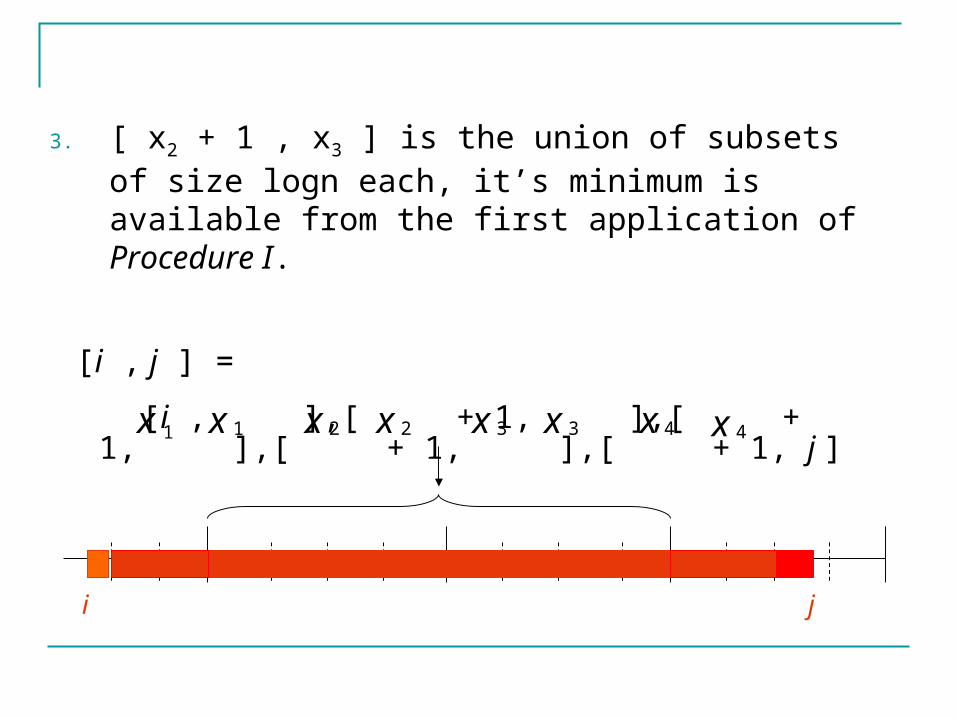
3. [ x2 + 1 , x3 ] is the union of subsets of size logn each, it’s minimum is available from the first application of Procedure I.
xx 1 2 x3x1 x2 x3 x4
i j
[i , ],[ + 1, ],[ + 1, ],[ + 1, ],[ + 1, j ]x4
[i , j ] =
Space and Time Complexity
Did we archive linear space and time complexity, as promised? let’s check.
Recall our preprocessing algorithm runs in three stage. We’ll check each stage separately.
Denote n as the size of our input list L.
We assume n is a power of 2 for convenience purposes.
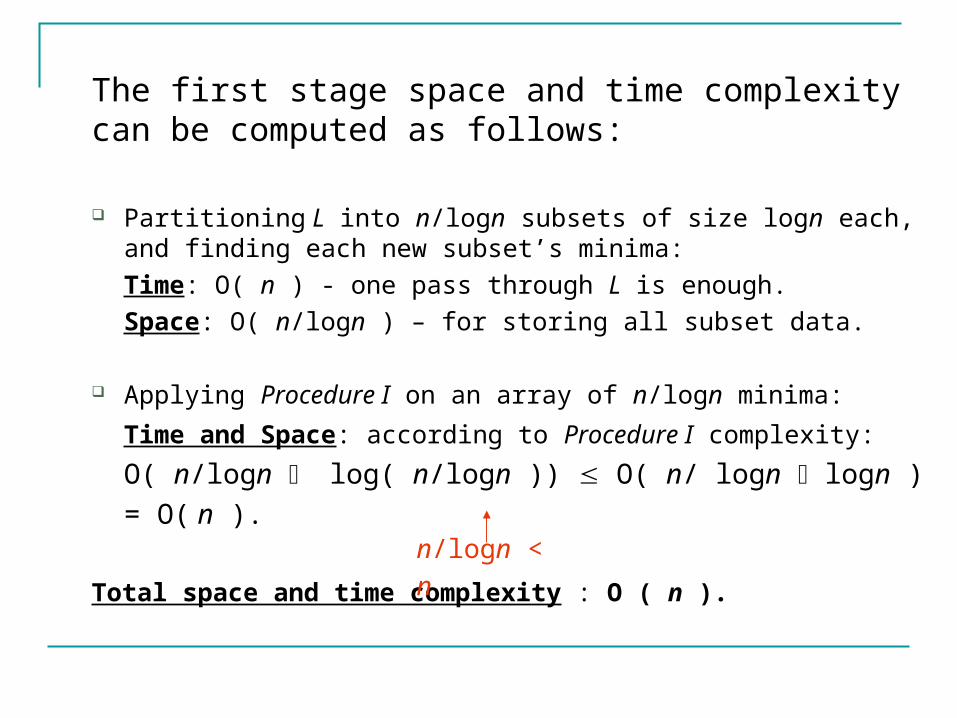
The first stage space and time complexity can be computed as follows:
Partitioning L into n/logn subsets of size logn each, and finding each new subset’s minima:
Time: O( n ) - one pass through L is enough.
Space: O( n/logn ) – for storing all subset data.
Applying Procedure I on an array of n/logn minima:
Time and Space: according to Procedure I complexity:
O( n/logn log( n/logn )) O( n/ logn logn )
= O( n ).
Total space and time complexity : O ( n ).
n/logn < n
The second stage space and time complexity can be computed as follows:
Partitioning each n/logn subset, into smaller subsets of size loglogn each and finding each new subset’s minima:
Time: O( n ) - one pass through L is enough.
Space: O( n/loglogn ) – for storing all subset data.
Applying Procedure I on n/logn arrays of logn/loglogn minima:
Time and Space: according to Procedure I complexity:
n/logn O( logn/loglogn log( logn/loglogn ))
n/logn O( logn/ loglogn loglogn ) = O( n ).
Total space and time complexity : O ( n ).
logn/loglogn < logn
The third stage simply runs Procedure II on inputs of size loglogn. So the space and time complexity of the third stage of the algorithm can be computed as
follows :
Time and Space: according to Procedure II complexity:
O ( 2loglogn log2logn ) = O( logn log2logn ) O ( log2n )
Total space and time complexity : O ( log2n ). log2logn < logn
Total space and time
complexity = O (n)
Aftermath
How much did we really gain by reducing the LCA problem to the restricted range-minima problem?
Can we be satisfied by just reducing to the range-minima problem?
If you recall, the restricted range-minima reduction allows us to use Procedure II which assumes input of restricted nature. We used Procedure II to answer range queries of size on subsets of size equal or smaller then loglogn.
We can instead apply Procedure I to each of these loglogn subset which would total the space and time complexity of the whole algorithm to O( nloglogn ).
If we choose to further partition these subset into subsets of size logloglogn, we would reach O(nlogloglogn). We can continue in this fashion for as much as we like, improving our algorithm’s complexity along the way.
If k is the number of partition stages our algorithm applied, then it’s space and time complexity equals O(nloglog … logn).
k
The space and Time complexity of our preprocessing algorithm for the un-restricted range minima problem is then : O(nlog*n) !
For practical applications the un-restricted range minima reduction is enough then, considerably simplifying the implementation process.
The restricted range minima reduction is needed mostly for theoretical purposes.
Bibliography