computer graphics & visualization key frame interpolation
TRANSCRIPT

computer graphics & visualization
Simulation and Animation
Key frame Interpolation

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Keyframe AnimationDraw one keyframe after another
Results in “rough” animation instead of a smooth transition from frame to frame

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Keyframe Interpolation
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Keyframe Interpolation
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Keyframe Interpolation

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Simple TranslationsLinear Interpolation is fine here
But what about rotations?
1000
000
000
000
)(z
y
x
t
t
t
tR
1000
)(z
y
x
tihg
tfed
tcba
tR

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Linear Interpolation of Rotations
K = (1-a) A + a B (linear interpolation: lerp)
Introduces non linear behavior on the arc

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
SLERPApproach by means of slerp = spherical linear interpolation
with
it follows
AP
BBAP
cos
cos
1||
PA
BA
P
BAP
sin
sin
sin
)sin(

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Quaternion Power Operator
[ cos(q/2), sin(q /2) * A] a
[cos(aq/2), sin(aq /2) * A] q a rotates to q orientation as a goes
from 0 to 1
=
Quaternions: q = (qbqa-1) a qa (slerp)
q = slerp(qa,qb, a)

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Curves• So far: smooth linear interpolation along a line
(or along an arc on the circle)
• Now extend the idea so that interpolation follows a given path, a curve
• In the following: description of curves
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
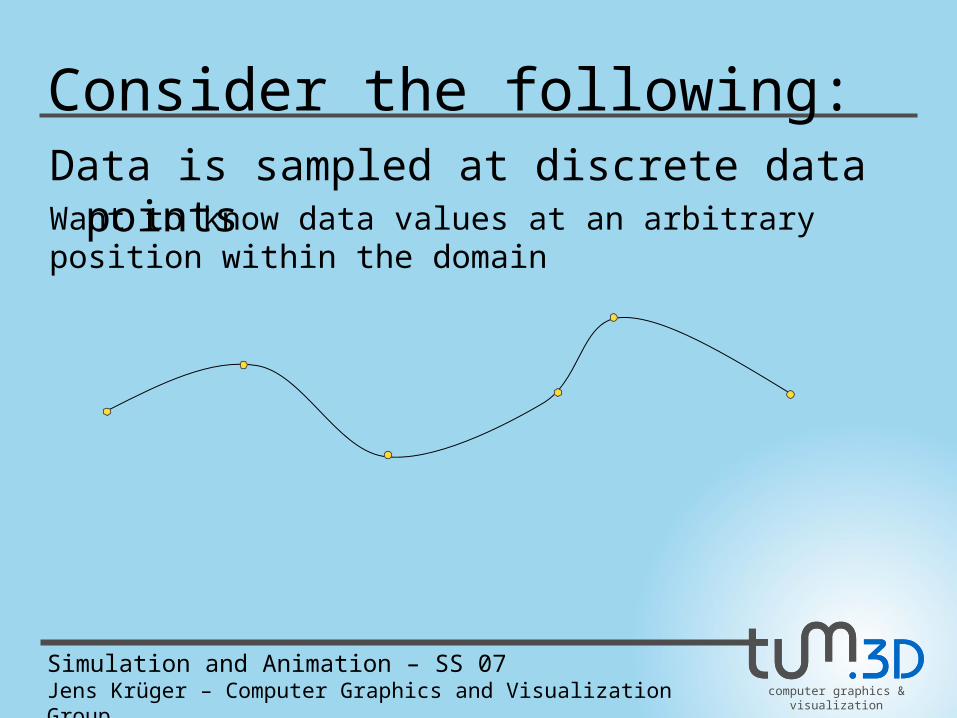
Consider the following:Data is sampled at discrete data pointsWant to know data values at an arbitrary position within the domain

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
The simple way• From n+1 known data samples construct a n-
dimensional polynomial• n+1 Samples → n+1 knows• n-dimensional polynomial has n+1
unknowns
011
1)( cxcxcxcxp nnn
nn
leads to system of n+1 linear equations

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
The simple way (cont.)• system of equations can be rewritten as matrix
1
2
1
1
2
1
11
11
1
21
22
11
11
1
1
1
1
n
n
n
n
nn
nnn
nn
nnn
nn
nn
y
y
y
y
c
c
c
c
xxx
xxx
xxx
xxx
Vandermonde Matrix

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Polynomial for approximation
21
1)(
xxf

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
How to handle multiple x values?
• do not use a single approximation function but use n (=dimension of the domain) functions and a new parameter t from 0 to 1
• x(t)=x, y(t)=y, z(t)=z …
x
yy(t)
x(t)

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
multiple x-values (cont.)leads to multiple polynomials
zzzz
yyyy
xxxx
dtctbtatz
dtctbtaty
dtctbtatx
23
23
23
)(
)(
)(
can be rewritten in matrix form
CTtztytxtQ ,,
zyx
zyx
zyx
zyx
ddd
ccc
bbb
aaa
C
1,,, 23 tttT

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Matrix notation
C can be split up into M (basis matrix)G (geometry matrix)
GM
ddd
ccc
bbb
aaa
C
zyx
zyx
zyx
zyx
M is fixed for a given approachG depends on the specific curve to fit
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Building M• derive a Matrix M for the Hermite approach • Hermite uses polynomials of degree 3 to a fit 2
points• it is an interpolation
→ 2 conditions• derivatives at the endpoints are given
→ 2 conditions
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
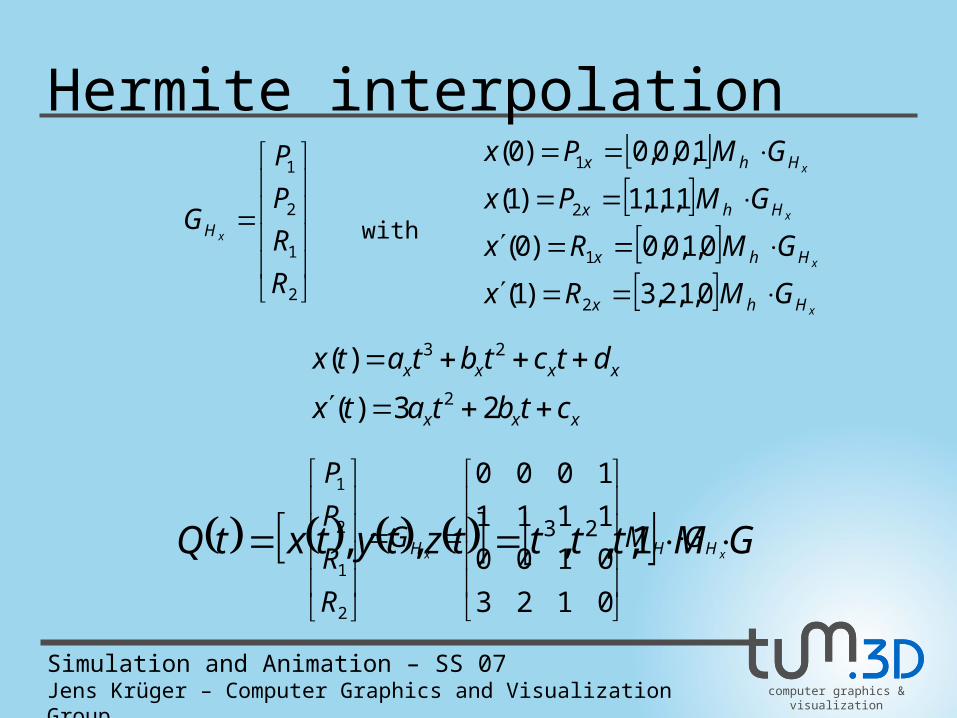
Hermite interpolation
2
1
2
1
R
R
P
P
GxH
x
x
x
x
Hhx
Hhx
Hhx
Hhx
GMRx
GMRx
GMPx
GMPx
0,1,2,3)1(
0,1,0,0)0(
1,1,1,1)1(
1,0,0,0)0(
2
1
2
1
with
xx HHH GMG
R
R
P
P
0123
0100
1111
1000
2
1
2
1
GMttttztytxtQ 1,,,,, 23
xxx
xxxx
ctbtatx
dtctbtatx
23)(
)(2
23

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Hermite interpolation (cont.)
223
123
223
123 1232132)( RttRtttPttPtttx
xx HHH GMG
R
R
P
P
0123
0100
1111
1000
2
1
2
1
0001
0100
1233
1122
HM
2
1
2
1
23
0001
0100
1233
1122
1,,,)(),(),()(
R
R
P
P
ttttztytxtQ

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Hermite interpolation• Cubic Hermite-Polynoms:
30H
33H
31H
32H
233
232
231
230
)23()(H
)1()(H
)1()(H
)21()1()(H
ttt
ttt
ttt
ttt
Charles Hermite (1822-1901)

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Hermite interpolation• Example:

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Hermite interpolation• Properties:– Neither affine invariant with respect to control
points nor with respect to vectors – No local control– Difficult to find tangent vectors– Curve segments can be attached continuously – Interpolation between points with tangents, e.g. for
Keyframe-Animation with given position and velocity
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
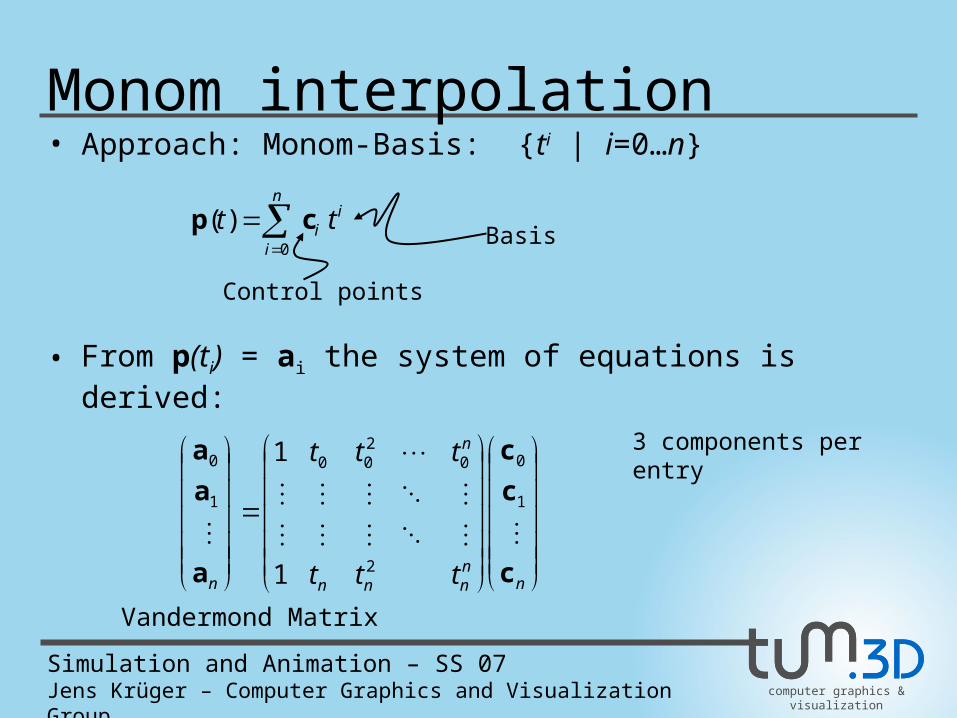
Monom interpolation• Approach: Monom-Basis: {ti | i=0…n}
• From p(ti) = ai the system of equations is derived:
Vandermond Matrix
n
i
ii tt
0
)( cpBasis
Control points
nnnnn
n
n ttt
ttt
c
c
c
a
a
a
1
0
2
0200
1
0
1
1 3 components per entry

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Curves• Idea: tangent vectors defined by first and last two points:
– b0 and bn will be interpolated
– bi will be approximated– Relation to Hermite-Interpolation:
b0
b2b1
b3(degree)3with)()1(
)()0(
)1(
)0(
23
01
3
0
nn
n
bbp
bbp
bp
bp
cubic Bézier-Curve
Example: cubic Bezier-Curve

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Curves• … and Hermite-Interpolation
• And for the curve:
BHBH GM
b
b
b
b
p
p
p
p
G
3
2
1
0
1000
3300
0033
0001
)1(
)1(
)0(
)0(
Geometry vectorfor Bézier
Matrix forBézier to Hermite
BMBTM
BHBMHTM
HMHTMt
GMB
GMMB
GMBp
)(
0001
0033
0363
1331
MBMwith

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Curves • The cubic Bézier-Curve:
• Bernstein-Polynoms of degree n:
with domain [0,1]
3with)(B
)1(3)1(3)1()(
0
33
22
12
03
nt
ttttttt
i
n
i
ni b
bbbbp
Bézier-Control-PointsBernstein-Polynoms
inini tt
i
nt
)1()(B
)!(!
!
ini
n
i
n
with
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
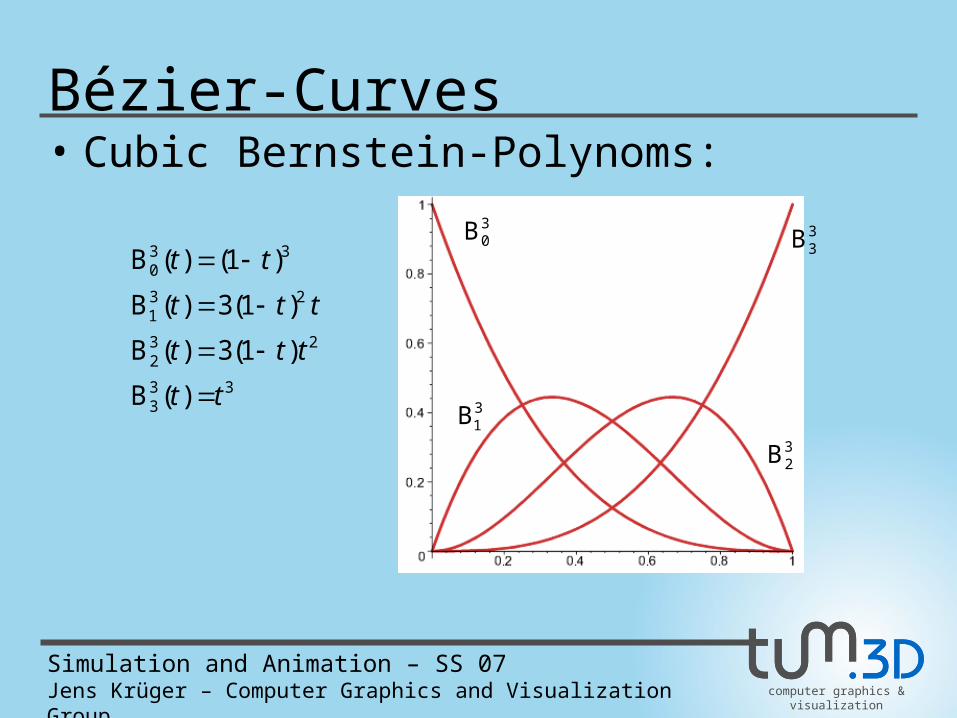
Bézier-Curves• Cubic Bernstein-Polynoms:
30B 3
3B
31B
32B
333
232
231
330
)(B
)1(3)(B
)1(3)(B
)1()(B
tt
ttt
ttt
tt

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Curves• Of degree n = 1: linear interpolation
• Of degree n = 2:
10101
110
10 )1()(B)(B)( bbbbbp ttttt
222
21
220 )(B,)1(2)(B,)1()(B ttttttt
20
11
10
2110
2110
22
102
)1(
))1(())1)((1(
)1()1()1)(1(
)1(2)1()(
bbb
bbbb
bbbb
bbbp
tt
tttttt
tttttttt
ttttt
iterated linear interpolation

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Curves• Iterated linear interpolation for degree 2:
20
11
10)1()( bbbp ttt
0b
1b
2b
10b
11b
20b
Example fort = 0,4
http://www.vis.uni-stuttgart.de/~kraus/LiveGraphics3D/
computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bezier Interpolation of Quaternions
De Casteljau

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
p1 slerp(qn ,an, 13)p2 slerp(an ,bn1, 13)p3 slerp(bn1,qn1, 13)p12 slerp(p1, p2, 13)p23 slerp(p2, p3, 13)pslerp(p12, p23, 13)
Spherical Linear Interpolation

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
For u = 1/4
tempslerp(qn ,an, 12)qn anp1 slerp(qn ,temp, 12)qn temptempslerp(an ,bn1, 12)an bn1p2 slerp(qn , temp, 12)qn temptempslerp(bn1,qn1, 12)bn1 qn1p3 slerp(bn1,temp, 12)bn1 temptempslerp(p1, p2, 12)p1 p2p12 slerp(p1, temp, 12)p1 temptempslerp(p2, p3, 12)p2 p3p23 slerp(p2,temp, 12)p2 temptempslerp(p12, p23, 12)p12 p23p23 slerp(p12,temp, 12)p12 temp
Repeated mid-point interpolation

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Spline-Curves• Problem so far: polynom degree depends on number
of control points• Idea: – Multiple segments with low degree instead of one segment
of high degree– Segments can be of arbitrary type:
• Hermite-Curves• Quadrics• Bézier-Curves
– Important is smooth transition between segments

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Spline-Curves• Spline: – A thin flexible rod used for the construction of ships– Deutsch: Straklatte, Strakfunktionen– A spline of n-th degree consists of polynomial
segments of max degree n – A cubic Spline describes the shape of a thin rod that
is fixed at start and end point

computer graphics & visualization
Simulation and Animation – SS 07Jens Krüger – Computer Graphics and Visualization Group
Bézier-Splines• Spline-Segments i:
• Spline s(u) ist sum of segments
n
jji
nji ut
0,)(B)( bs
bi,3 = bi+1,0
ui
ui+1bi,0
bi,1bi,2
bi+1,1