computational aeroelasticity - metu | aerospace …yyaman/avt086/kolonay/ray_kolo… · ·...
TRANSCRIPT
Kolonay 1
CRD
Computational Aeroelasticity
The Cultural and Convention CenterMETU
Inonu bulvariAnkara, Turkey
Sponsored by:RTA-NATO
The Applied Vehicle Technology Panel
presented byR.M. Kolonay Ph.D.
General Electric Corporate Research & Development CenterAnkara, Turkey Oct.. 1-5, 2001

Kolonay 2
CRD
• Introduction- Fluid-Structure Interactions
•Aeroelasticity- Aeroelastic analysis/design in an MDA/MDO Environment
• Static Aeroelasticity
• Dynamic Aeroelasticity
• Commercial Programs with Aeroelastic Analysis/DesignCapabilities
Presentation Outline
Kolonay 3
CRD
Dynamic Aeroelastic Phenomena
• Dynamic Response
• Limit Cycle Oscillations (LCO)
• Buffet
• Flutter
Dynamic Aeroelasticity
Solutions found in time, frequency, and Laplace domain usuallywith generalized coordinates
Kolonay 4
CRD Dynamic Aeroelasticity
Dynamic Response
Transient response due to a rapidly applied load.
• Atmospheric Turbulence- Continuous random- Discrete random (gust)
• Landing loads
• “Snap” maneuvers
• Store Separation

Kolonay 5
CRD Dynamic Aeroelasticity
Limit Cycle Oscillations
Typically caused by shock induced oscillations on a surface or flow/shocks attaching/detaching from a surface trailing edge.
• Panel Flutter
• Control Surface “Buzz”
• Store/Wing configurations
Reduces structural life
Usually requires nonlinear flow conditions and possibly nonlinearstructures (cs hinge stiffness)
Kolonay 6
CRD Dynamic Aeroelasticity
Buffet
Response due to time-dependentseparated flows (usually vortical)impinging on structural surfaces.
• Bluffed bodies on horizontal and vertical surfaces
• Wings, strakes etc.. on vertical tails (often a twin tail prob-lem)
Reduces structural life
Requires nonlinear aerodynamics to capture phenomena

Kolonay 7
CRD Dynamic Aeroelasticity
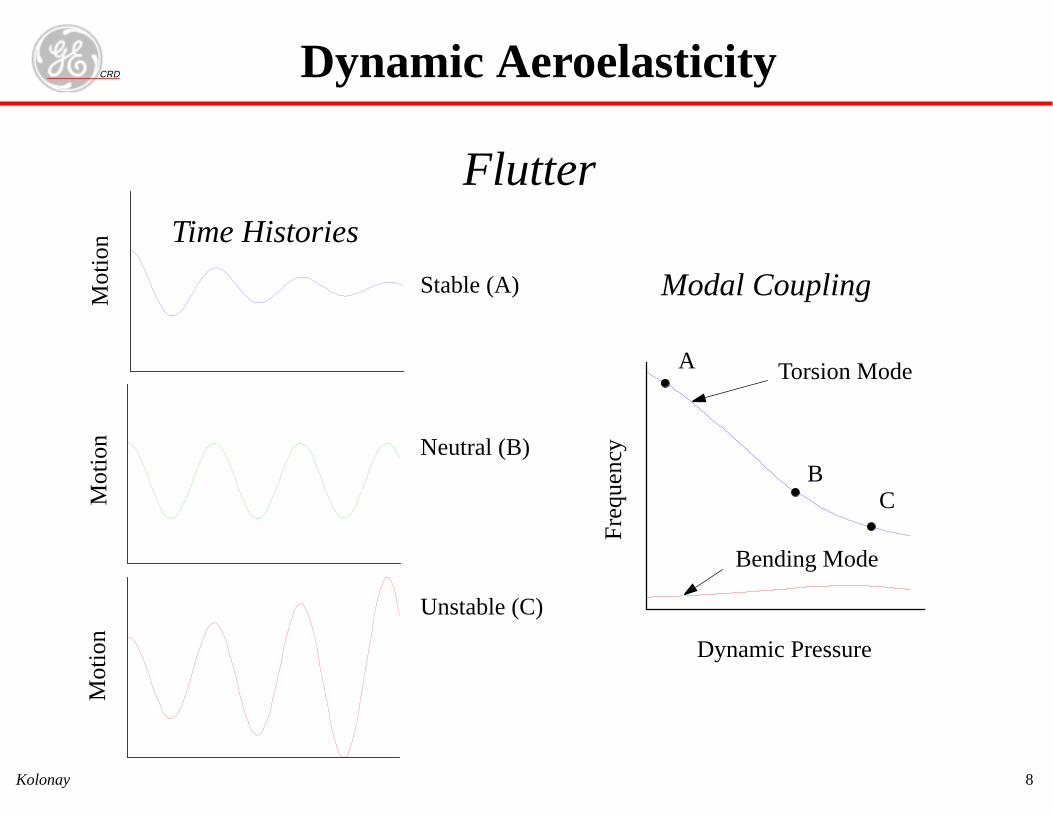
Flutter
Dynamic instability where-by the system extracts energy from thefree stream flow producing a divergent response.
• Usually resultant of coupling of 2 or more structural modes- Wing bending and torsion- Wing bending control surface hinge torsion- Wing torsion fuselage bending- Horizontal or vertical tail and fuselage
Divergent behavior can occur within a few cycles and be cata-strophic
Theodore Von Karman is said to have remarked that
“some men fear flutter because they do not understand it, whileothers fear it because they do”[8]
Kolonay 8
CRD
Mot
ion
Mot
ion
Mot
ion
Stable (A)
Neutral (B)
Unstable (C)F
requ
ency
A
BC
Torsion Mode
Bending Mode
Dynamic Aeroelasticity
FlutterTime Histories
Modal Coupling
Dynamic Pressure

Ko 9
D Dynamic Aeroelasticity
ro(20)
t
(21)
h forcesq.
(22)
or me initial state.(23)
t( )
3 igenvalue problem
lonay
CR
F
le
WE
F
(2
Flutterm the aeroelastic EOM
ere represents motion independent external (20) can be written as
stability solve the homogenous equation from so
Mu̇̇ Ku+ F u u̇ u̇̇ t, , ,( )=
F u u̇ u̇̇ t, , ,( ) F u u̇ u̇̇, ,( ) F t( )+=
F t( )
Mu̇̇ Bu̇ Ku+ + Q1[ ] u̇̇ Q2[ ]u̇ Q3[ ]u F+ + +=
Mu̇̇ Bu̇ Ku+ + Q1[ ] u̇̇ Q2[ ]u̇ Q3[ ]u+ +=
) can be solved by time integration or as an e

Ko 10
D
ra ssume that the
ns ments
(24)
ss and synchronous
(25)
it ubstituting into
4
(26)
0
0
Dynamic Aeroelasticity
lonay
CR
T
u
A
W
(2
Eigenvalue Solutionsnsform (23) to modal coordinates and a
teady aerodynamics depend only on displace
ume that the structural response is separable
h independent of time and .S
) gives
uh{ }
Mhhuh˙̇ Buh
˙ Khhuh12---ρV
2Qhh[ ]uh–+ + =
uh{ } qh{ }est
=
qh{ } s σ iω+=
Mhhs2
Bhhs Khh12---ρV
2Qhh–+ + q h{ } =
Ko 11
D
n
aeroelastic stiff-
causing roots
es
h amplitude and
Dynamic Aeroelasticity
lonay
CR
• Eq. (26) is the basic flutter eigenvalue equatio
• All matrices can be expressed as real but the
ness matrix is unsymmetric
to be complex conjugate pairs.
• - Generalized unsteady aerodynamic forc
- Often assumed harmonic cast in frequency domain witphase
- Doublet Lattice, CPM, Mach Box, Strip Theory
• Several solutions exist for solving (26)- Method
- Method
- Method
- Method- State space
Khh12---ρV
2Qhh–
Qhh
KK E–P K–P

Ko 12
D
ca ecomes
(27)
- s
- re
,
- fre
- re
- e
- da
0=
k(≡
hh
h =
–
Dynamic Aeroelasticity
lonay
CR
s
V
b
p
M
Qh
ρ
k
qh
γ
i ≡
P-K Flutter Solution
n be expressed as . (26) b
elected freestream speed
ference semi-chord
- complex response frequency and eigenvalue
, generalized mass, damping, stiffness matrices
- generalized aerodynamic matrix
estream density
duced frequency,
igenvector of modal coordinates
mping factor
sVkb
------ γ i+( ) Vb---- p= =
Vb----
2p
2Mhh
Vb---- pBhh Khh
ρV2
2----------Q k( )hh–+ + qh
γ i+ )Bhh Khh
QR
iQI
+[ ]
kωbV
-------=
1

Kolonay 13
CRD
P-K Method Comments
• Matrices are real but non-symmetric yielding complex roots.
• Flutter equation only “true” when , an estimate elsewhere
• Mode switching often occurs making results interpretation difficult
• depends on Mach number and reduced frequency
• Solution requires to be a continuous function of .
- Results in curve fitting which can cause errors
• Above formulation does not allow
• User responsible for determining “match point solutions”
γ 0=
Qhh Qhh M k,( )
Qhh k
Qhh
k 0=
Dynamic Aeroelasticity
Kolonay 14
CRD
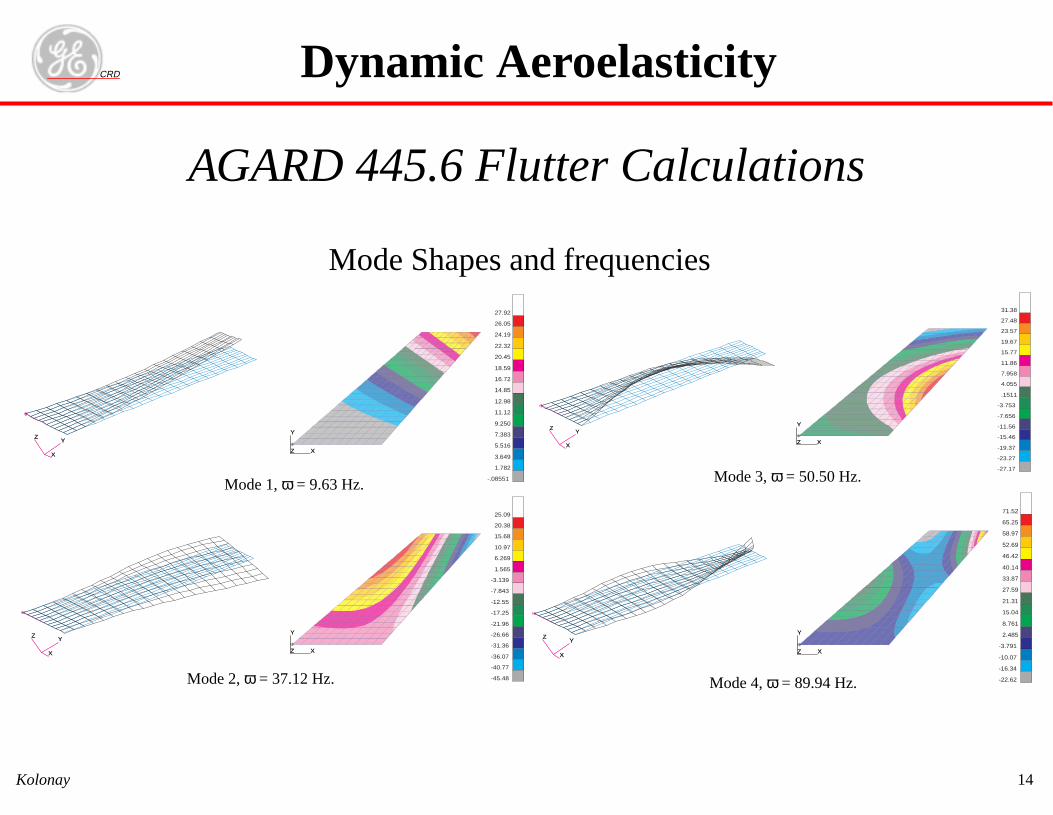
AGARD 445.6 Flutter Calculations
X
Y
Z
31.38
27.48
23.57
19.67
15.77
11.86
7.958
4.055
.1511
-3.753
-7.656
-11.56
-15.46
-19.37
-23.27
-27.17
X
Y
ZX
YZ
X
YZ
Dynamic Aeroelasticity
X
Y
Z
71.52
65.25
58.97
52.69
46.42
40.14
33.87
27.59
21.31
15.04
8.761
2.485
-3.791
-10.07
-16.34
-22.62
X
Y
ZX
YZ
X
YZ
Mode 4,ω = 89.94 Hz.
X
Y
Z
25.09
20.38
15.68
10.97
6.269
1.565
-3.139
-7.843
-12.55
-17.25
-21.96
-26.66
-31.36
-36.07
-40.77
-45.48
X
Y
ZX
YZ
X
YZ
Mode 2,ω = 37.12 Hz.
X
Y
Z
27.92
26.05
24.19
22.32
20.45
18.59
16.72
14.85
12.98
11.12
9.250
7.383
5.516
3.649
1.782
-.08551
X
Y
ZX
YZ
X
YZ
Mode Shapes and frequencies
Mode 3,ω = 50.50 Hz.Mode 1,ω = 9.63 Hz.
Kolonay 15
CRD Dynamic Aeroelasticity
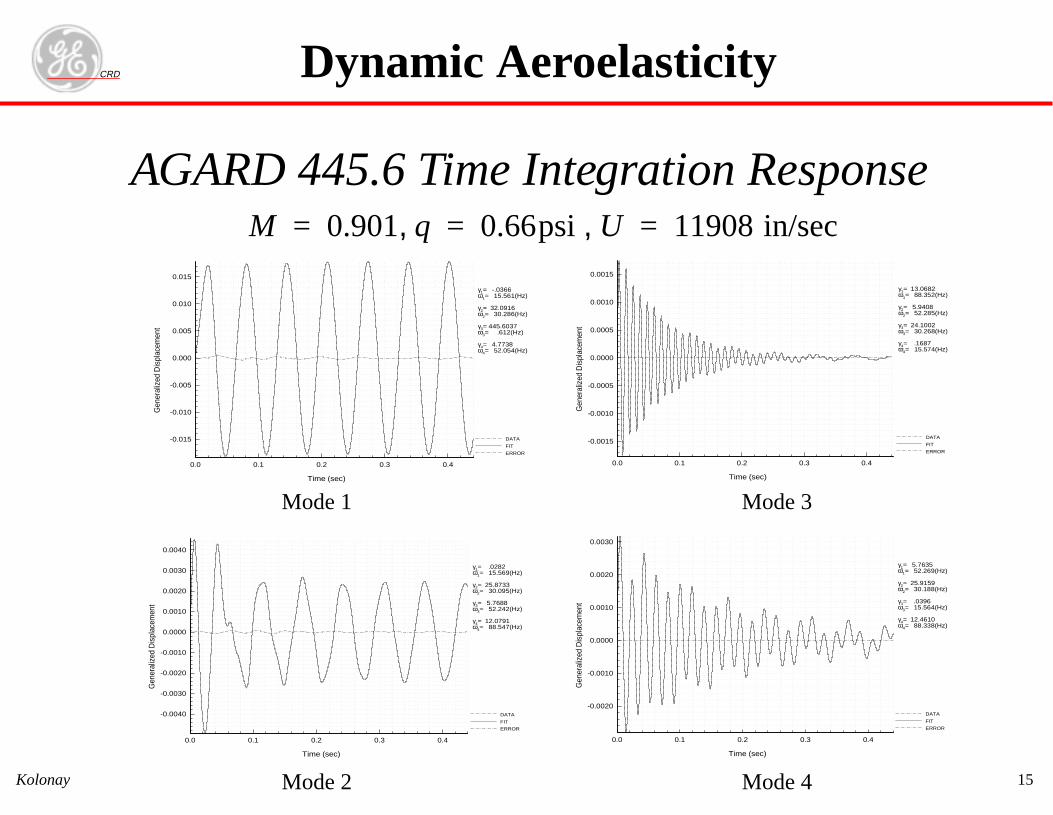
AGARD 445.6 Time Integration Response
0.0 0.1 0.2 0.3 0.4
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= 13.0682ω1= 88.352(Hz)
γ2= 5.9408ω2= 52.285(Hz)
γ3= 24.1002ω3= 30.268(Hz)
γ4= .1687ω4= 15.574(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= -.0366ω1= 15.561(Hz)
γ2= 32.0916ω2= 30.286(Hz)
γ3= 445.6037ω3= .612(Hz)
γ4= 4.7738ω4= 52.054(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= 5.7635ω1= 52.269(Hz)
γ2= 25.9159ω2= 30.188(Hz)
γ3= .0396ω3= 15.564(Hz)
γ4= 12.4610ω4= 88.338(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.0040
-0.0030
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
0.0040
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= .0282ω1= 15.569(Hz)
γ2= 25.8733ω2= 30.095(Hz)
γ3= 5.7688ω3= 52.242(Hz)
γ4= 12.0791ω4= 88.547(Hz)
DATA
FIT
ERROR
Mode 1 Mode 3
Mode 2 Mode 4
M 0.901 q, 0.66psi U, 11908 in/sec= = =
Kolonay 16
CRD Dynamic Aeroelasticity
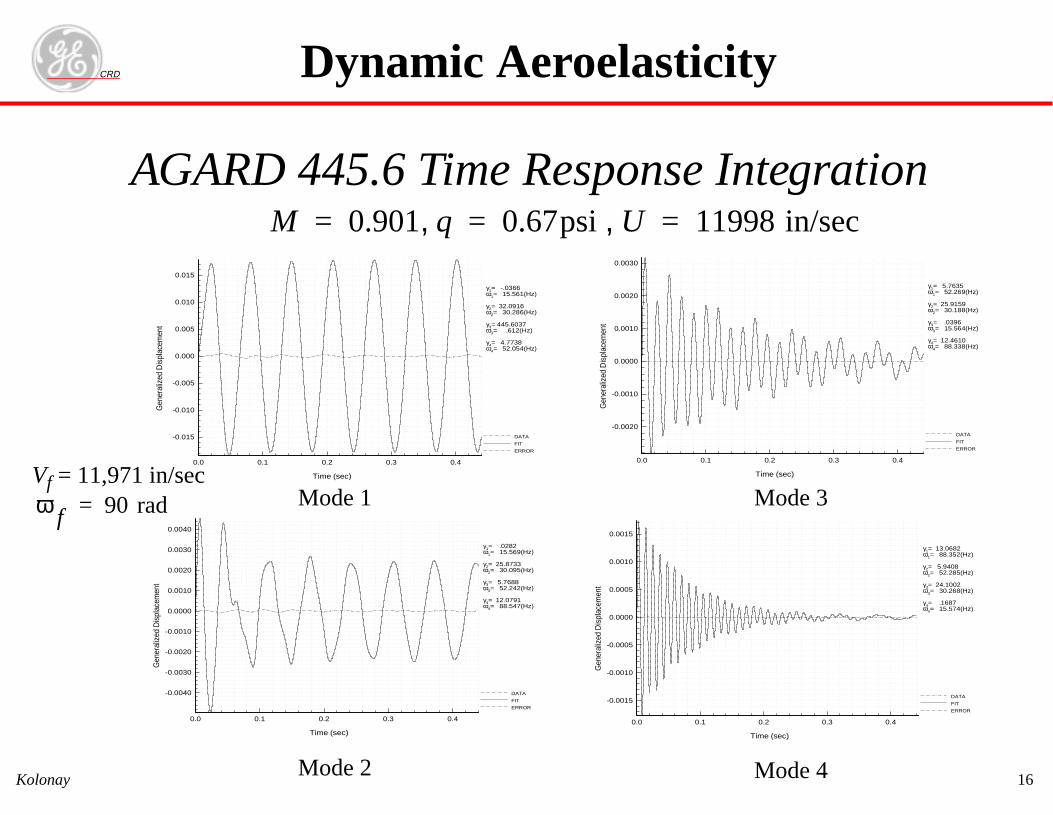
AGARD 445.6 Time Response Integration
0.0 0.1 0.2 0.3 0.4
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= 5.7635ω1= 52.269(Hz)
γ2= 25.9159ω2= 30.188(Hz)
γ3= .0396ω3= 15.564(Hz)
γ4= 12.4610ω4= 88.338(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= 13.0682ω1= 88.352(Hz)
γ2= 5.9408ω2= 52.285(Hz)
γ3= 24.1002ω3= 30.268(Hz)
γ4= .1687ω4= 15.574(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.0040
-0.0030
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
0.0040
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= .0282ω1= 15.569(Hz)
γ2= 25.8733ω2= 30.095(Hz)
γ3= 5.7688ω3= 52.242(Hz)
γ4= 12.0791ω4= 88.547(Hz)
DATA
FIT
ERROR
0.0 0.1 0.2 0.3 0.4
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
Time (sec)
Gen
eral
ized
Dis
plac
emen
t
γ1= -.0366ω1= 15.561(Hz)
γ2= 32.0916ω2= 30.286(Hz)
γ3= 445.6037ω3= .612(Hz)
γ4= 4.7738ω4= 52.054(Hz)
DATA
FIT
ERROR
M 0.901 q, 0.67psi U, 11998 in/sec= = =
Mode 1
Mode 4Mode 2
Mode 3Vf = 11,971 in/sec
radω f 90=

Kolonay 17
CRD
AGARD 445.6 P-K Flutter Solution
6000 8000 10000 12000 14000
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
MODE 1MODE 2MODE 3MODE 4
Dynamic Aeroelasticity
Dam
ping
rat
io (g
)
Velocity (V in/sec)
Velocity vs. Damping
Vf =1181 in/sec

Kolonay 18
CRD
AGARD 445.6 P-K Flutter Solution
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2
100
200
300
400
500
MODE 1MODE 2MODE 3MODE 4
445.6 Wing Damping Ratio versus Frequency
(M= .901, α = 0.00°, ρ∞ = 9.307E-09 slugs/ in )
Dynamic Aeroelasticity
Fre
quen
cy (
radi
ans)
Damping ratio (g)
Velocity Root Locus
radω f 96=

Kolonay 19
CRD Dynamic Aeroelasticity
AGARD 445.6 P-K Flutter Solution
6000 8000 10000 12000 14000
100
200
300
400
500
MODE 1MODE 2MODE 3MODE 4
Velocity vs. FrequencyF
requ
ency
(ra
dian
s)
Velocity (V in/sec)

Kolonay 20
CRD Aeroelastic Software
Global Aeroelastic Software Developments• MSC/NASTRAN (U.S.)
• UAI/ASTROS (recently bought by MSC) (U.S.)
• UAI/NASTRAN (U.S.)
• ELFINI (France, Dessault)
• LAGRANGE (Germany, formerly MBB)
• STARS (Great Britain, RAE)
• OPTSYS (Sweden, SAAB)
• COMPASS (China)
• ARGON (Russia, Central Aerohydrodynamic Institute)

Ko 21
D Aeroelastic Software
lonay
CR
MSC/NASTRAN• Steady Aerodynamics
- Subsonic•Doublet Lattice (k=0)•3-D panel Method (available in the near future)•Bypass option for any AIC
- Supersonic•ZONA51•Bypass option for any AIC•Aerodynamic database•Import/export loads data
• Unsteady Aerodynamic- Subsonic
•Doublet Lattice with body interference•Strip Theory
- Supersonic•Mach Box

Ko 22
D
stability derivativesIC
lonay
CR
•Piston Theory•ZONA51
• Structural Modeling- Very rich selection of FE
• Static Aeroelastic Analysis- 5 DOF trim (no drag/thrust trim)- Flexible increment analysis- Computes rigid, restrained and unrestrained flexible- Able to add experimental load correction factors to A- Divergence of restrained vehicle- Slender body models- Multiple set selectable aerodynamic models- Aeroelastic database- Import/export loads data
Aeroelastic Software

Ko 23
D
ality in PATRAN envi-
lonay
CR
• Dynamic Aeroelasticity- Frequency response analysis- Random analysis- Transient analysis- Gust (random and discrete 1-d)- Flutter P-K, K, K-E (K-E allowsk=0)
- curve fits cubic through all points
• F-S Interface- Infinite plate spline- Thin plate spline- Finite plate spline- Beam spline- Rigid load Transfer
• Pre-Post Processing- Extensive Flight Loads pre/post processing function
ronment
Q M k,( )
Aeroelastic Software

Ko 24
D Aeroelastic Software
bilities
lonay
CR
UAI/ASTROS Aeroelastic Capa• Steady Aerodynamics
- Subsonic•USSAERO (Woodward Aerodynamics, flat panel)•QUADPAN (Lockheed Martin, 3-D panel)•Bypass option for any AIC•Multiple set selectable aerodynamic models
- Supersonic•USSAERO (flat panel)•QUADPAN (3-D panel)•Bypass option for any AIC
• Unsteady Aerodynamic- Subsonic
•Doublet Lattice- Supersonic
•Constant Pressure Method (Apa, Northrop)

Ko 25
D
Quadrilateral Plates,
rivatives
lonay
CR
• Structural Modeling- Membrane type FEM (Rods, Beams, Shear panels,
Composites)
• Static Aeroelastic Analysis- Full 6 DOF Trim- Computes rigid and four types of flexible stability de- User defined loads- Trim Optimization
• Dynamic Aeroelasticity- Gust Response- Flutter P-K (computes flutter velocity)
- Several choices for curve fits
• F-S Interface- Infinite Plate spline
Q M k,( )
Aeroelastic Software

Ko 26
D
nd tailor the sys-
lonay
CR
- 3-D surface spline- Beam spline- Rigid load Transfer
• Very easy to add user defined functionality atem
Aeroelastic Software

Ko 27
D
. B ations, Addison-Wes-y P
. W ty”, Purdue Universitycho .
. S ional Flutter Theory toircr
. N cements, Vol III-ST
. B ts for Time-Accurateero , Aeroelasticity, Flow-du
. Fa ARD-R807, October995
. M P-221(01), April,971
. I.E aft Flutter,” Journal ofircr
References
isplinghoff, Ashley and Halfman “Aeroelasticity”, Dover Publicublishing Company, Inc., 1995.
eisshaar, “Fundamentals of Static and Dynamic Aeroelasticiol of Aeronautics and Astronautics, West Lafayette, IN 1992
milg, B. and Wasserman, L. S., “Application of Three Dimensaft Structures”, USAAF TR 4798, 1942.
eill, D.J., Herendeen, D.L., Venkayya, V.B., “ASTROS EnhanROS Theoretical Manual”, WL-TR-95-3006.
endiksen, Oddvar O., “Fluid-Structure Coupling Requiremenelastic Simulations”, AD-Vol.53-3, Fluid-Structure Interactionced Vibration and Noise, Volume III ASME, 1997.
rhat, C., “Special course on Parallel Computing in CFD”, AG.
acNeal, R. H., “The NASTRAN Theoretical Manual,” NASA-S.
. Garrick and W.H. Reed, III “Historical Development of Aircraft, Vol. 18, No. 11, November 1981.
lonay
CR
1le
2S
3A
4A
5AIn
61
71
8A

Ko 28
D
. G for Flutter and Strengthna ry and Application,”,FF
0. H Flutter Equation byete er 1971, pp. 885-889.
1. N MacNeal-Schwendlerorp 1999.
lonay
CR
9AA
1D
1C
rumman Aerospace Corporation, “An Automated Procedure lysis and Optimization of Aerospace Vehicles Volume I. TheoDL-TR-75-137.
assig, H.J., “An Approximate True Damping Solution of the rminant Iteration,” Journal of Aircraft, Vol. 8, No. 11, Novemb
eill, D.J., “MSC/Flight Loads and Dynamics Training,”, The oration, 815 Colorado Boulevard, Los Angeles, CA, August
References