compatibility of the iers earth rotation representation and its relation to the nro conditions...
TRANSCRIPT
Compatibility of the IERS earth rotation representationand its relation to the NRO conditions
Athanasios Dermanis
Department of Geodesy and SurveyingThe Aristotle University of Thessaloniki
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
C C C C1 2 3[ ]e e ee
T T T T1 2 3[ ]e e ee
C C C1 2 3( , )O e e e
T T T1 2 3( , )O e e e
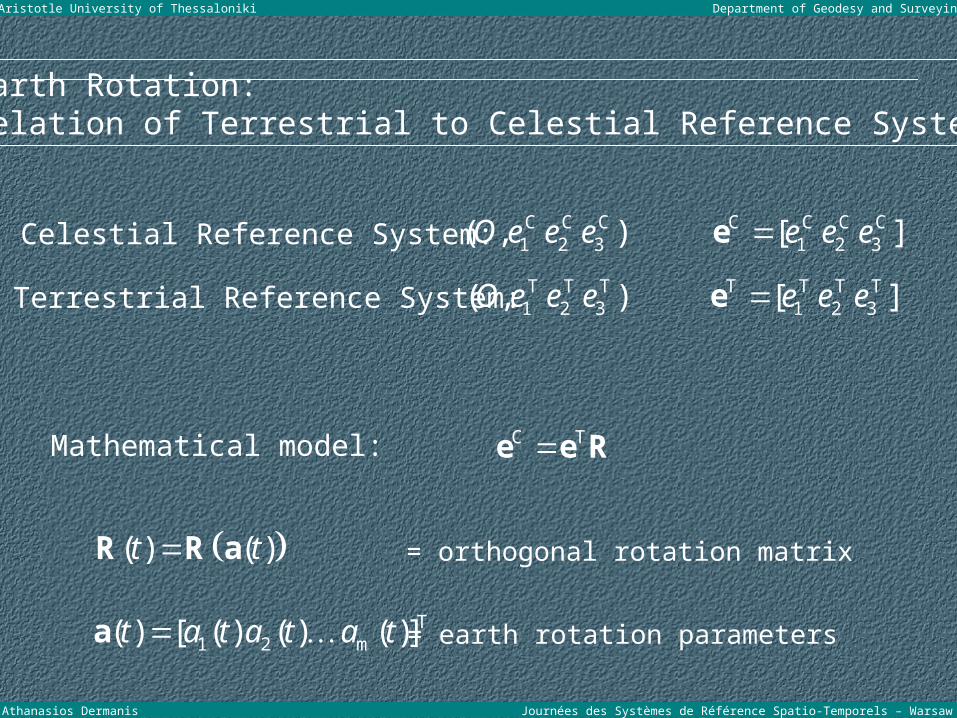
Earth Rotation:Relation of Terrestrial to Celestial Reference System
Celestial Reference System:
Terrestrial Reference System:
Mathematical model: C Te e R
( ) ( )t tR R a = orthogonal rotation matrix
T1 2 m( ) [ ( ) ( ) ( )]t a t a t a ta = earth rotation parameters
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
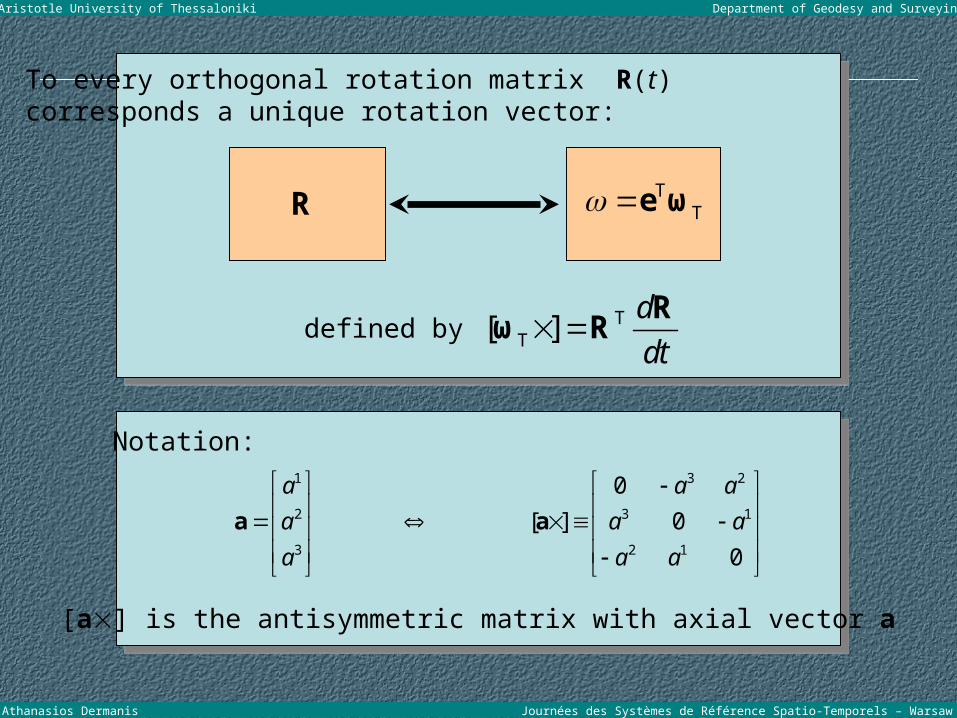
To every orthogonal rotation matrix R(t) corresponds a unique rotation vector:
TT e ω
defined by TT[ ]
d
dt
Rω R
R
Notation:3 2
3 1
2 1
0
[ ] 0
0
a a
a a
a a
a
1
2
3
a
a
a
a
[a] is the antisymmetric matrix with axial vector a
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
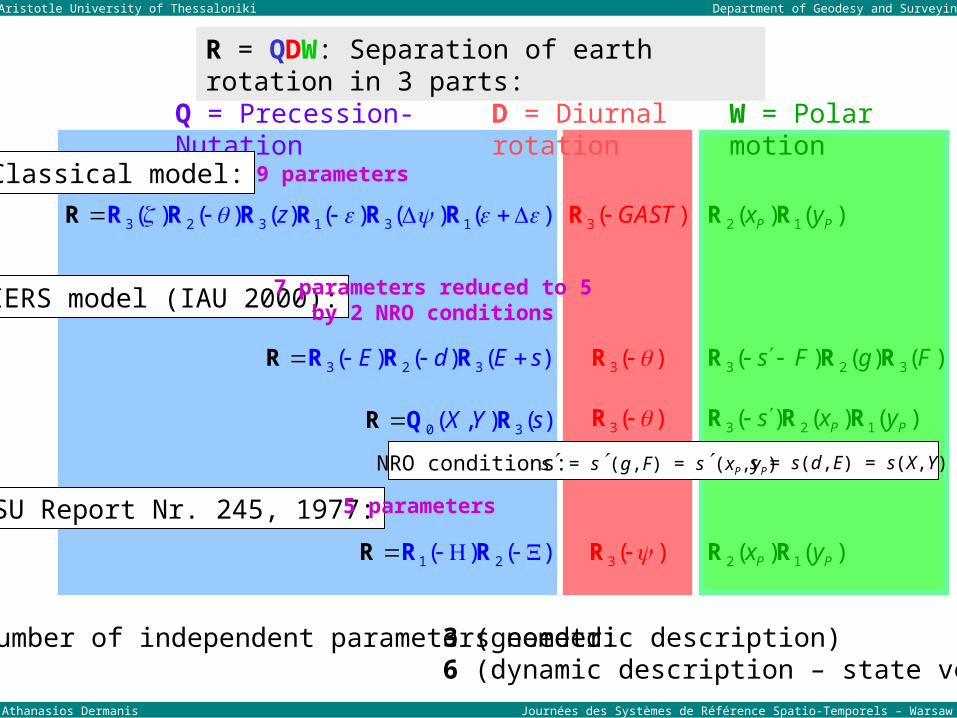
R = QDW: Separation of earth rotation in 3 parts:
3( )GASTR
3( )R
3( )R
3( )R
D = Diurnal rotation
Number of independent parameters needed: 3 (geometric description)6 (dynamic description – state vector)
9 parameters
NRO conditions:
3 2 3 1 3 1( ) ( ) ( ) ( ) ( ) ( )z R R R R R RR
3 2 3( ) ( ) ( )E d E s R R RR
0 3( , ) ( )X Y s RR Q
1 2( ) ( ) R R R
Q = Precession-Nutation
s = s (g,F) = s (xP,yP) s = s(d,E) = s(X,Y)
Classical model:
IERS model (IAU 2000):
2 1( ) ( )P Px yR R
3 2 3( ) ( ) ( )s F g F R R R
OSU Report Nr. 245, 1977:
2 1( ) ( )P Px yR R
3 2 1( ) ( ) ( )P Ps x yR R R
W = Polar motion
5 parameters
7 parameters reduced to 5by 2 NRO conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
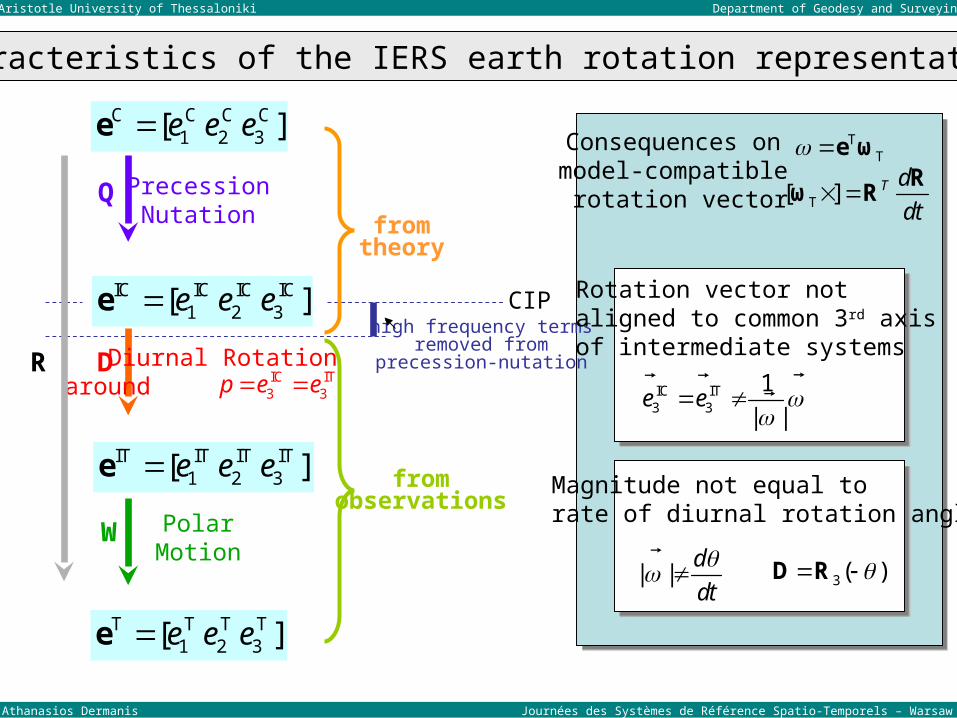
Characteristics of the IERS earth rotation representation
C C C C1 2 3[ ]e e ee
T T T T1 2 3[ ]e e ee
IC IC IC IC1 2 3[ ]e e ee
IT IT IT IT1 2 3[ ]e e ee
Q
D
W
PrecessionNutation
Diurnal Rotationaround
PolarMotion
fromtheory
fromobservations
R
high frequency termsremoved from
precession-nutation
CIP
Consequences on model-compatible
rotation vector
TT e ω
T[ ] T d
dt
Rω R
IC IT3 3
1
| |e e
Rotation vector not aligned to common 3rd axis of intermediate systems
Magnitude not equal torate of diurnal rotation angle
| |d
dt
3( ) D R
IC IT3 3p e e
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Objective: Construct a compatible representation with a 3 part separation Objective: Construct a compatible representation with a 3 part separation
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
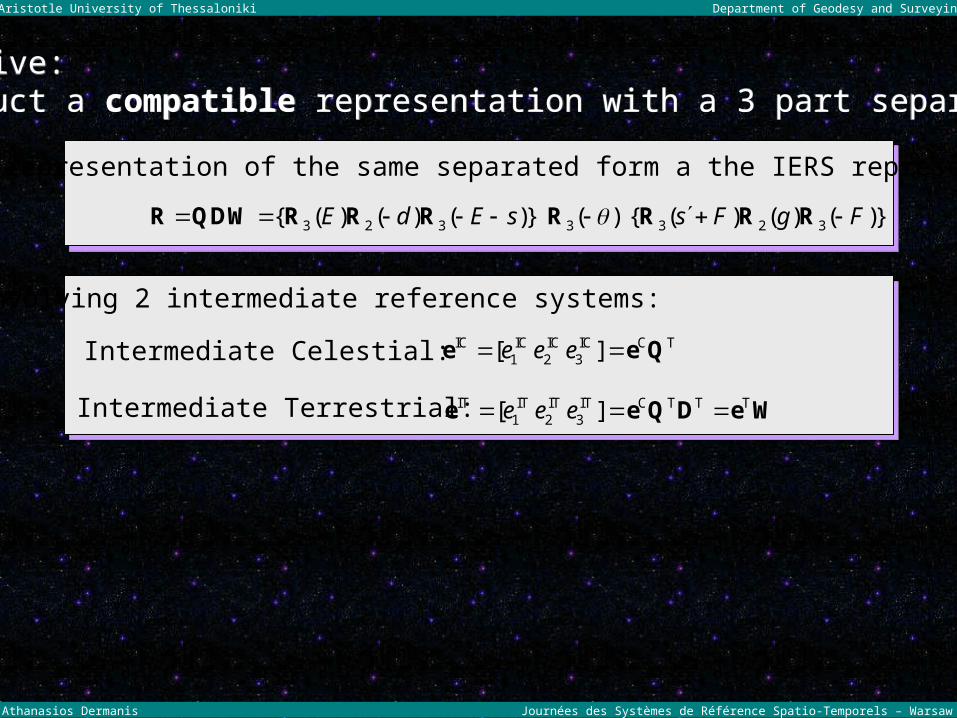
Objective: Construct a compatible representation with a 3 part separation Objective: Construct a compatible representation with a 3 part separation
3 2 3 3 3 2 3{ ( ) ( ) ( )} ( ) { ( ) ( ) ( )}E d E s s F g F R QDW R R R R R R R
Involving 2 intermediate reference systems:
Find a representation of the same separated form a the IERS representation
IC IC IC IC C T1 2 3[ ]e e e e e Q
IT IT IT IT C T T T1 2 3[ ]e e e e e Q D e W
Intermediate Celestial:
Intermediate Terrestrial:
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
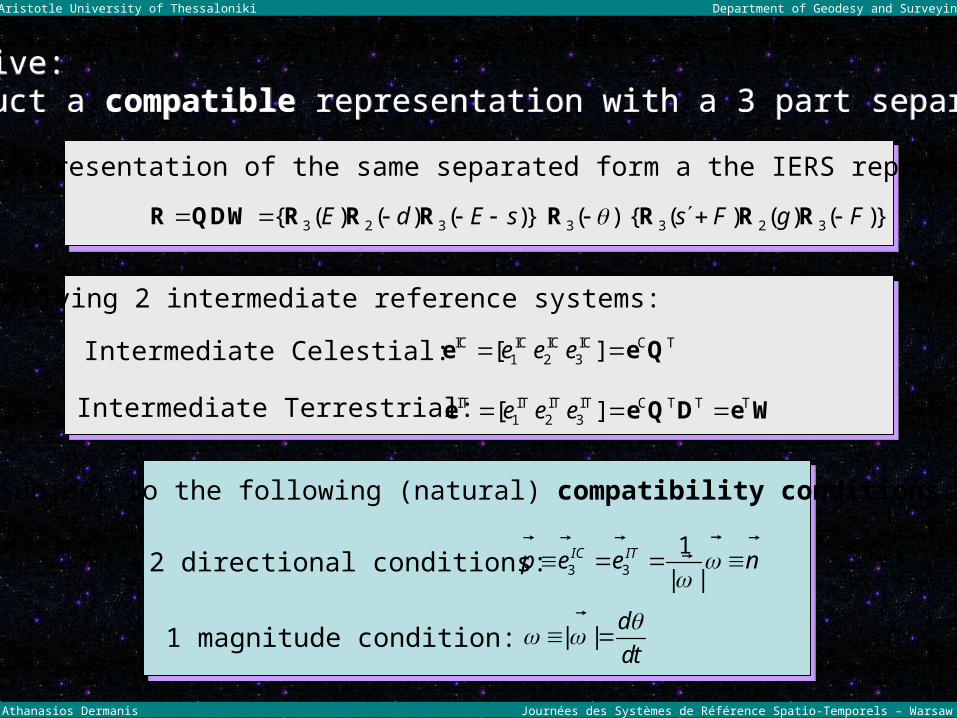
Objective: Construct a compatible representation with a 3 part separation Objective: Construct a compatible representation with a 3 part separation
3 2 3 3 3 2 3{ ( ) ( ) ( )} ( ) { ( ) ( ) ( )}E d E s s F g F R QDW R R R R R R R
Involving 2 intermediate reference systems:
Find a representation of the same separated form a the IERS representation
Subject to the following (natural) compatibility conditions:
3 3
1
| |IC ITp e e n
| |d
dt
Intermediate Celestial:
Intermediate Terrestrial:
2 directional conditions:
1 magnitude condition:
IC IC IC IC C T1 2 3[ ]e e e e e Q
IT IT IT IT C T T T1 2 3[ ]e e e e e Q D e W
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
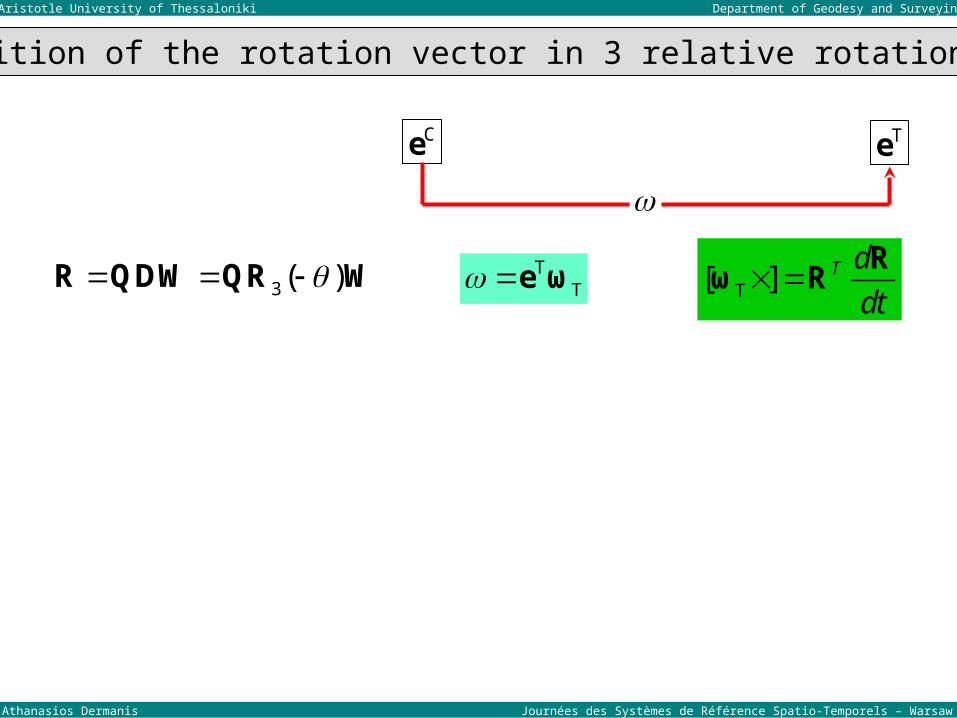
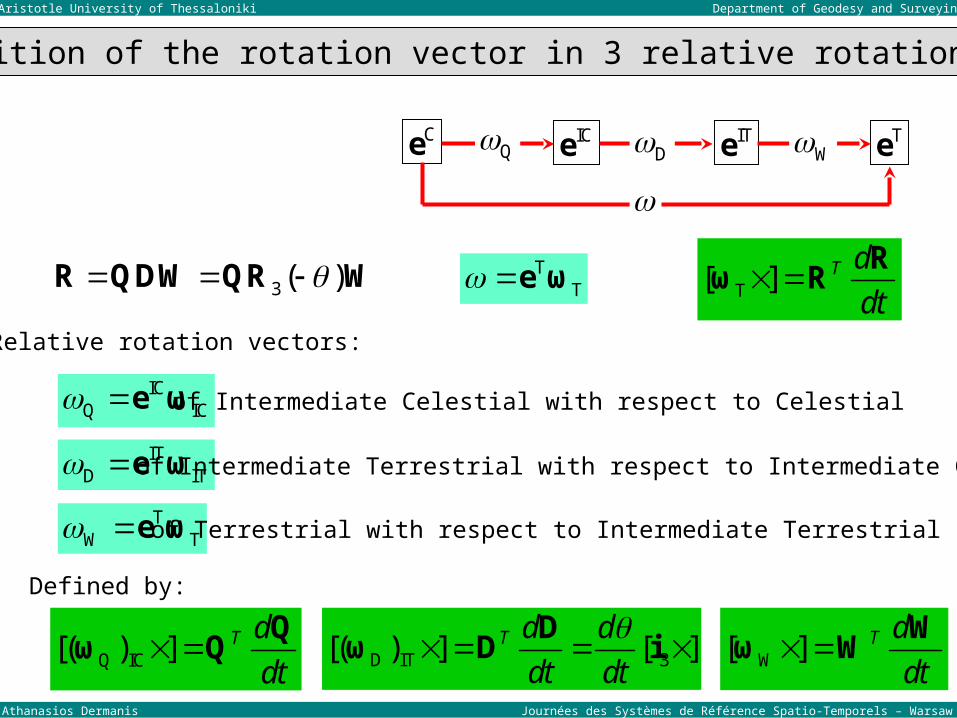
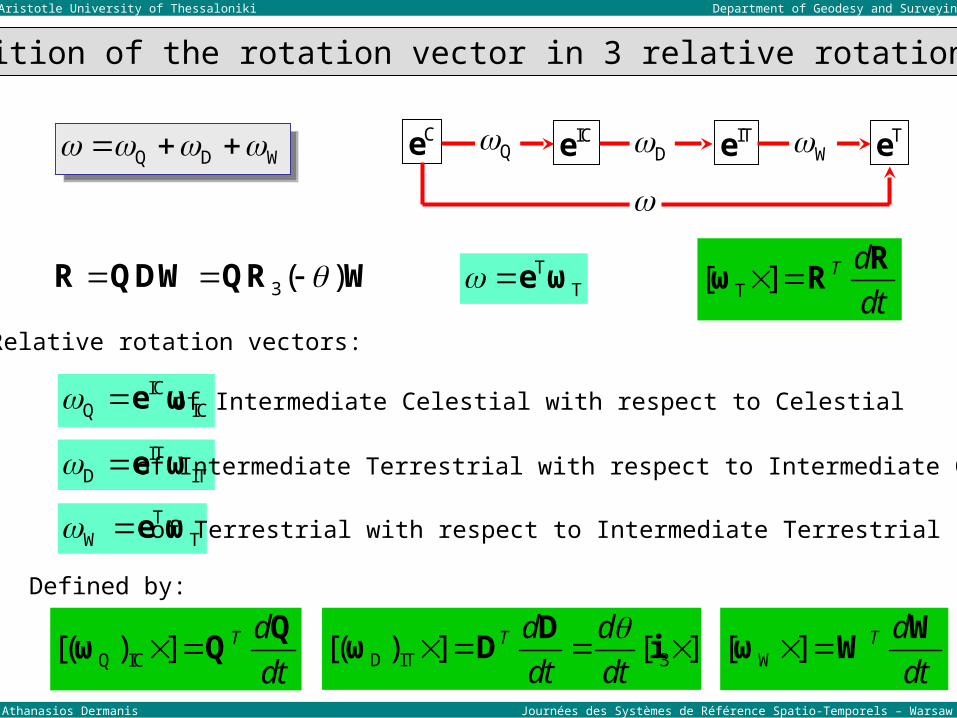
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W T[ ] T d
dt
Rω RT
T e ω
Ce Te
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
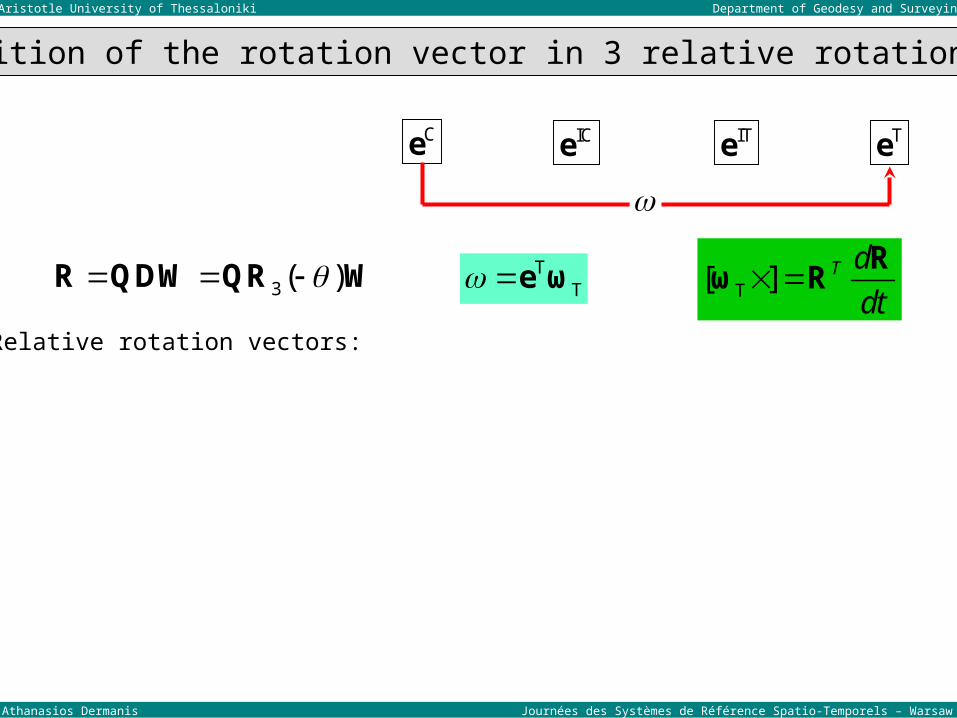
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W
Relative rotation vectors:
T[ ] T d
dt
Rω RT
T e ω
Ce ICe
ITe Te
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
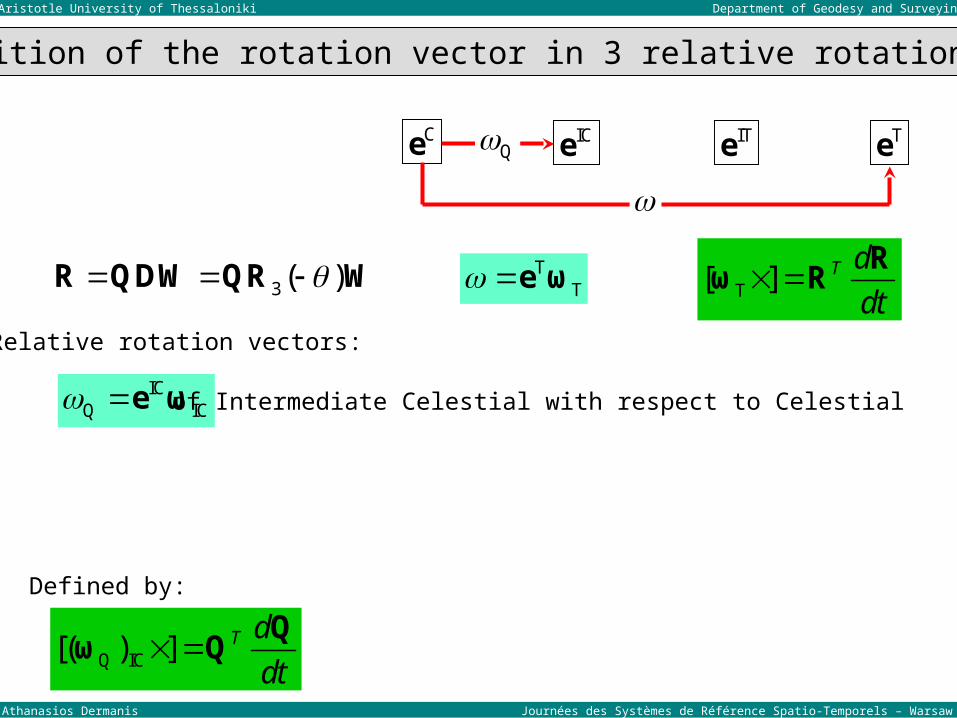
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W
Q IC[( ) ] T d
dt
Qω Q
ICQ IC e ω
of Intermediate Celestial with respect to Celestial
Relative rotation vectors:
Defined by:
T[ ] T d
dt
Rω RT
T e ω
Ce ICe
ITe Te
Q
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
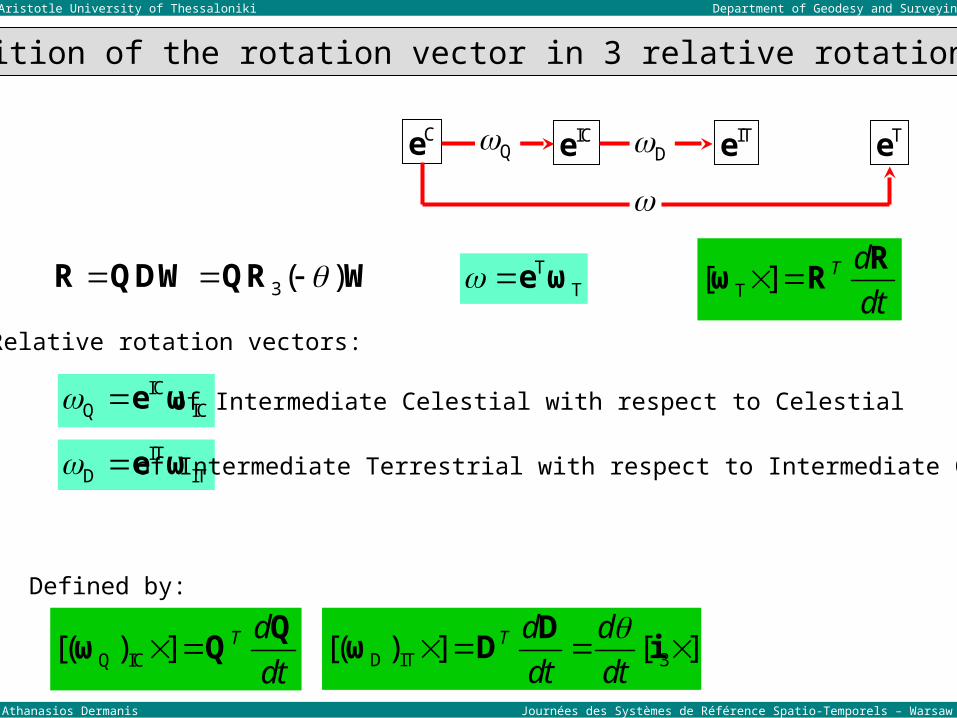
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W
Q IC[( ) ] T d
dt
Qω Q D IT 3[( ) ] [ ]T d d
dt dt
Dω D i
ICQ IC e ω
of Intermediate Celestial with respect to Celestial
Relative rotation vectors:
ITD IT e ω
of Intermediate Terrestrial with respect to Intermediate Celestial
Defined by:
T[ ] T d
dt
Rω RT
T e ω
Ce ICe
ITe Te
Q
D
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W
Q IC[( ) ] T d
dt
Qω Q D IT 3[( ) ] [ ]T d d
dt dt
Dω D i W[ ] T d
dt
Wω W
ICQ IC e ω
of Intermediate Celestial with respect to Celestial
Relative rotation vectors:
ITD IT e ω
of Intermediate Terrestrial with respect to Intermediate Celestial
TW T e ω
of Terrestrial with respect to Intermediate Terrestrial
Defined by:
T[ ] T d
dt
Rω RT
T e ω
Ce ICe
ITe Te
Q
D W
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Decomposition of the rotation vector in 3 relative rotation vectors
3( ) R QDW QR W
Q D W
Q D W
Q IC[( ) ] T d
dt
Qω Q D IT 3[( ) ] [ ]T d d
dt dt
Dω D i W[ ] T d
dt
Wω W
ICQ IC e ω
of Intermediate Celestial with respect to Celestial
Relative rotation vectors:
ITD IT e ω
of Intermediate Terrestrial with respect to Intermediate Celestial
TW T e ω
of Terrestrial with respect to Intermediate Terrestrial
Defined by:
T[ ] T d
dt
Rω RT
T e ω
Ce ICe
ITe Te
Q
D W
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
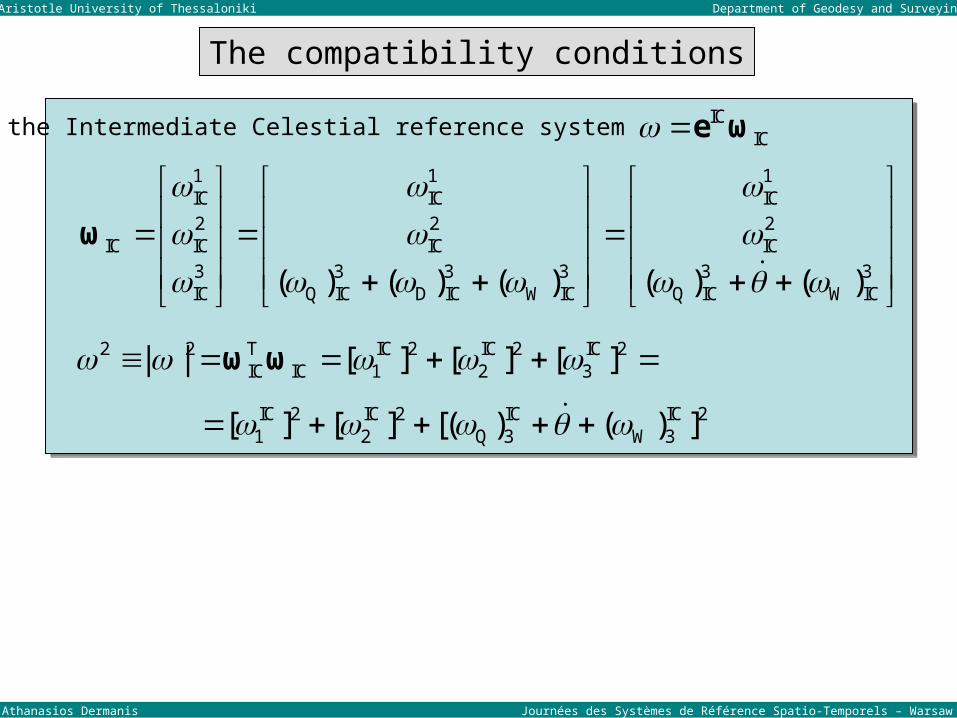
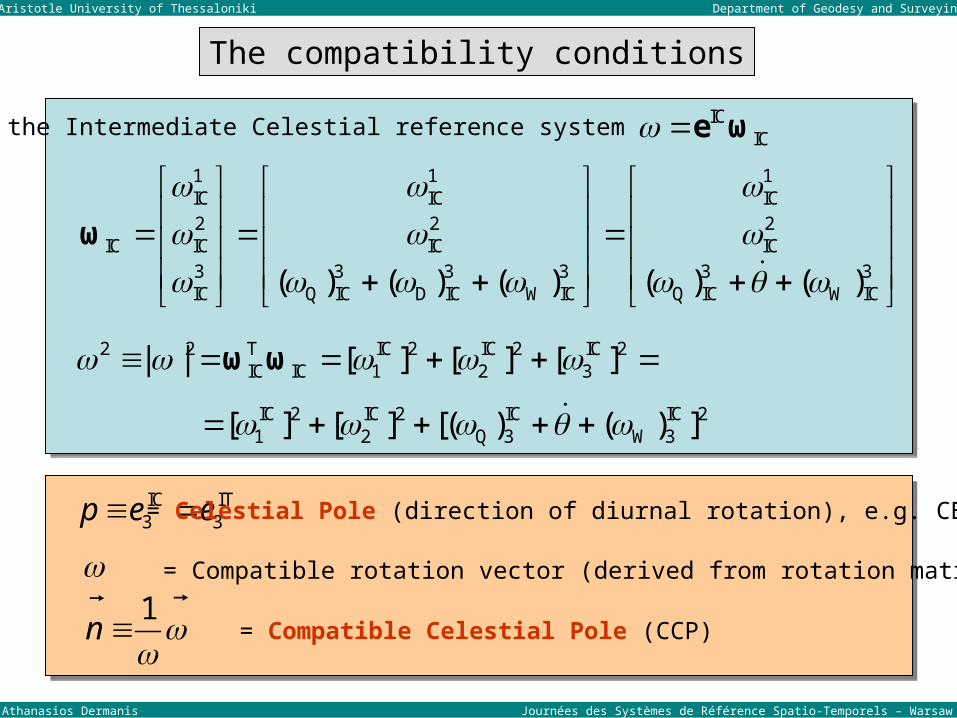
In the Intermediate Celestial reference system ICIC e ω
1 1 1IC IC IC2 2 2
IC IC IC IC3 3 3 3 3 3IC Q IC D IC W IC Q IC W IC( ) ( ) ( ) ( ) ( )
ω
2 2 T IC 2 IC 2 IC 2IC IC 1 2 3| | [ ] [ ] [ ] ω ω
IC 2 IC 2 IC IC 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
IC IT3 3p e e
In the Intermediate Celestial reference system
= Celestial Pole (direction of diurnal rotation), e.g. CEP, CIP
ICIC e ω
1 1 1IC IC IC2 2 2
IC IC IC IC3 3 3 3 3 3IC Q IC D IC W IC Q IC W IC( ) ( ) ( ) ( ) ( )
ω
2 2 T IC 2 IC 2 IC 2IC IC 1 2 3| | [ ] [ ] [ ] ω ω
IC 2 IC 2 IC IC 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
1n
= Compatible Celestial Pole (CCP)
= Compatible rotation vector (derived from rotation matrix R)
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
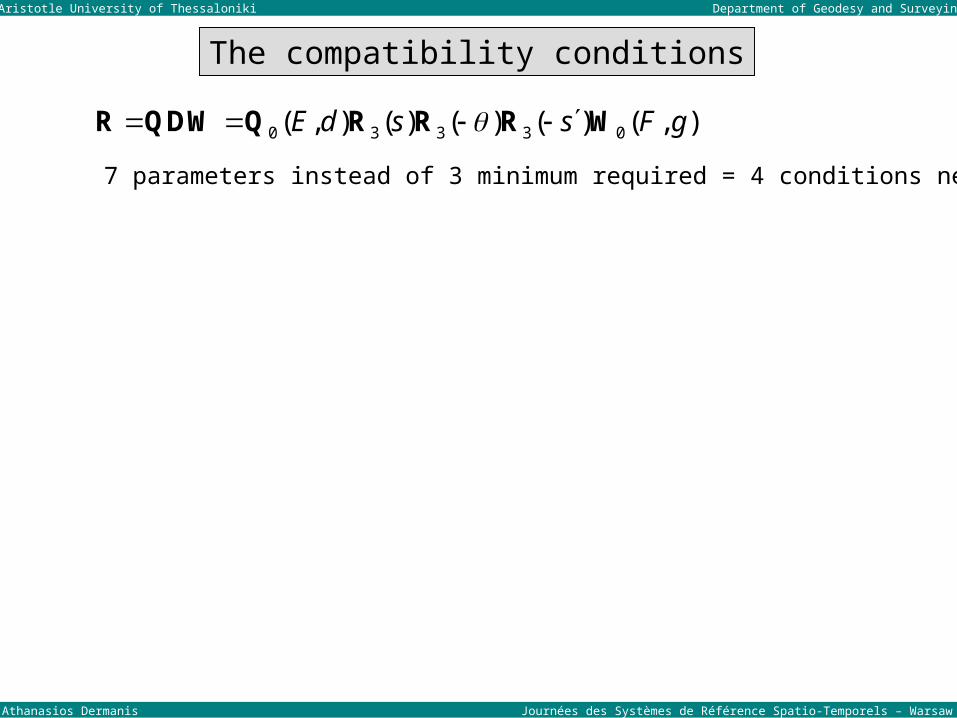
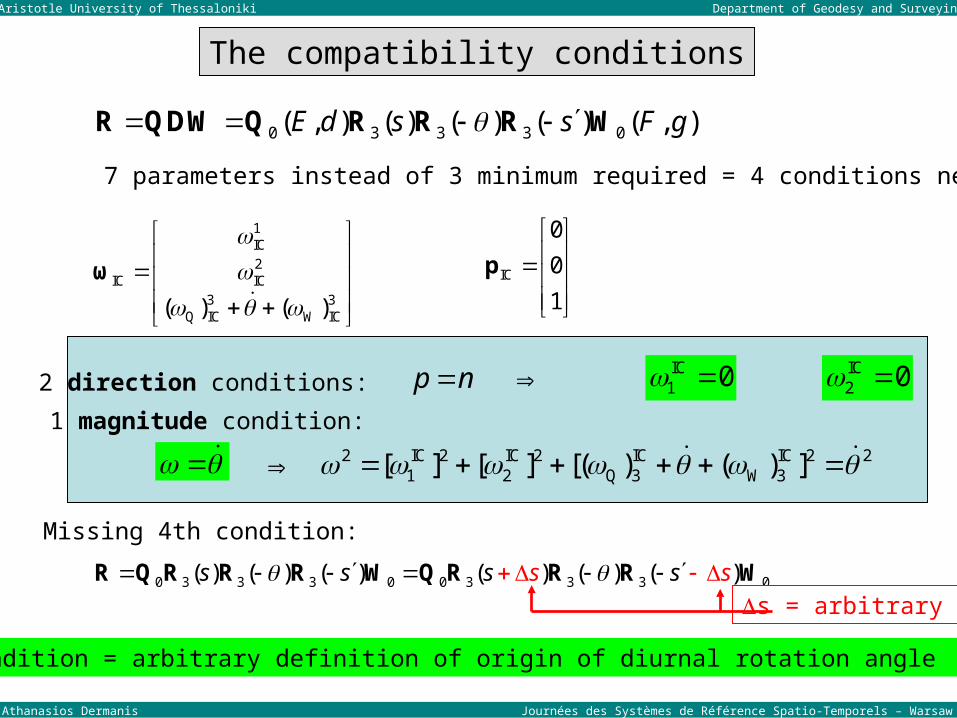
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
7 parameters instead of 3 minimum required = 4 conditions needed !
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
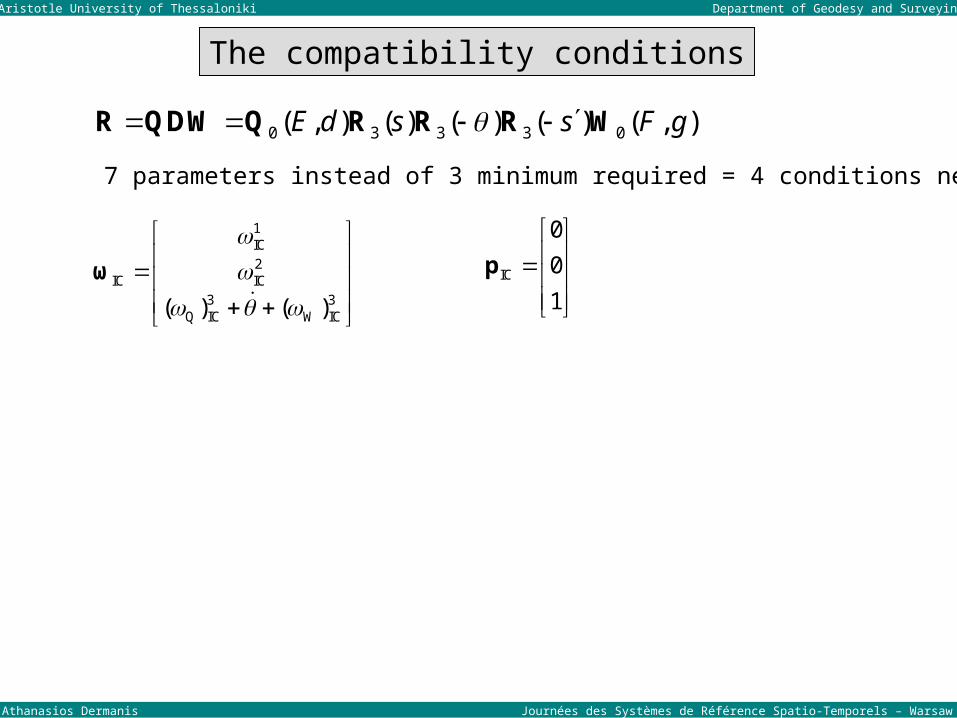
1IC2
IC IC3 3
Q IC W IC( ) ( )
ω
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
7 parameters instead of 3 minimum required = 4 conditions needed !
IC
0
0
1
p
The compatibility conditions

The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
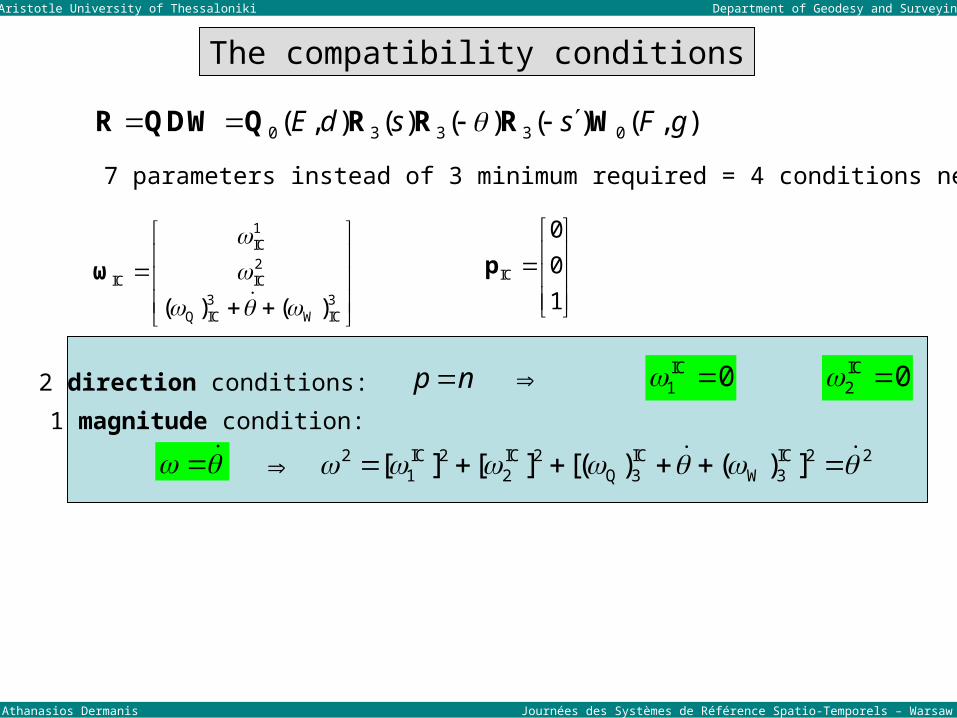
p n
1IC2
IC IC3 3
Q IC W IC( ) ( )
ω
2 direction conditions:IC1 0 IC
2 0
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
7 parameters instead of 3 minimum required = 4 conditions needed !
IC
0
0
1
p
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
p n
1IC2
IC IC3 3
Q IC W IC( ) ( )
ω
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:IC1 0 IC
2 0 1 magnitude condition:
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
7 parameters instead of 3 minimum required = 4 conditions needed !
IC
0
0
1
p
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
p n
1IC2
IC IC3 3
Q IC W IC( ) ( )
ω
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:IC1 0 IC
2 0 1 magnitude condition:
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
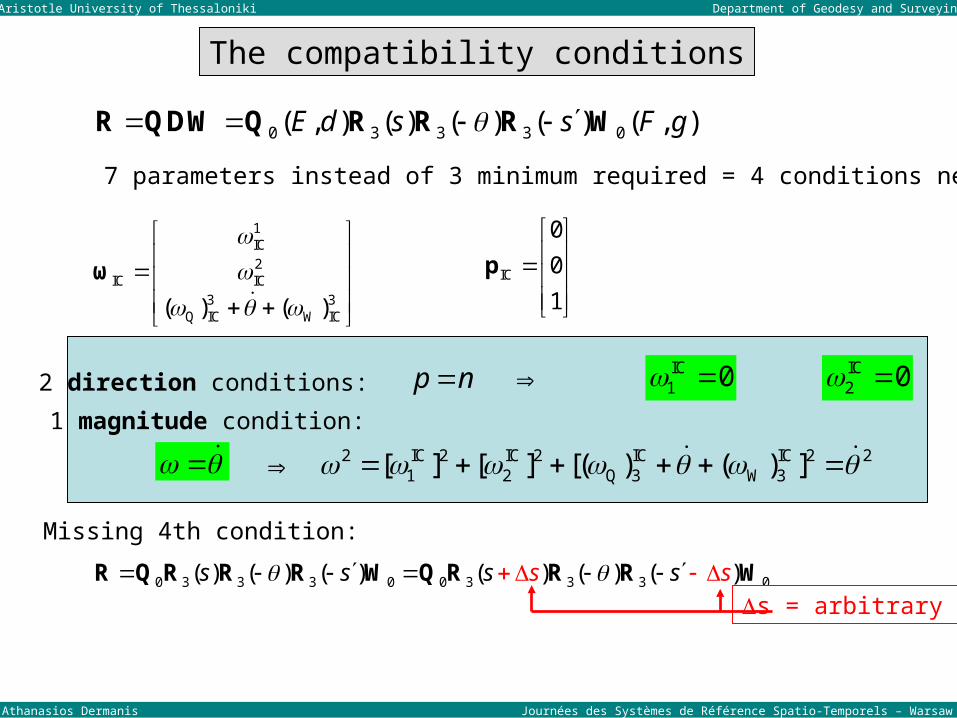
Missing 4th condition:
7 parameters instead of 3 minimum required = 4 conditions needed !
0 3 3 3 0 0 3 3 3 0( ) ( ) ( ) ( ) ( ) ( )ss s ss s R Q R R R W Q R R R W
IC
0
0
1
p
s = arbitrary !
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
p n
1IC2
IC IC3 3
Q IC W IC( ) ( )
ω
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:IC1 0 IC
2 0 1 magnitude condition:
0 3 3 3 0( , ) ( ) ( ) ( ) ( , )E d s s F g R QDW Q R R R W
Missing 4th condition:
7 parameters instead of 3 minimum required = 4 conditions needed !
0 3 3 3 0 0 3 3 3 0( ) ( ) ( ) ( ) ( ) ( )ss s ss s R Q R R R W Q R R R W
IC
0
0
1
p
s = arbitrary !
4th condition = arbitrary definition of origin of diurnal rotation angle
The compatibility conditions
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
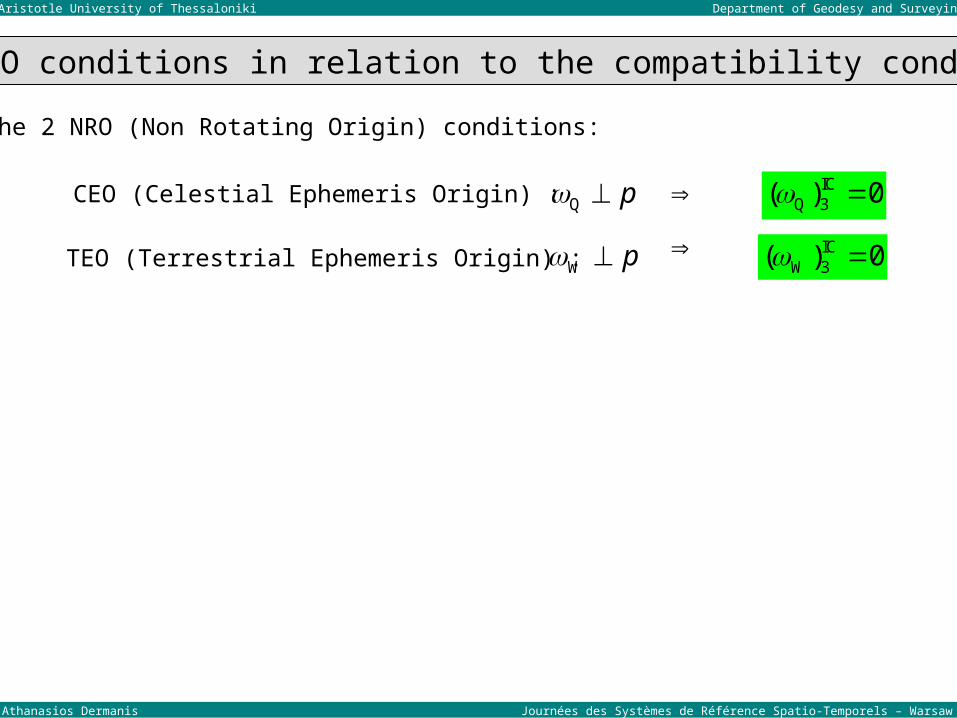
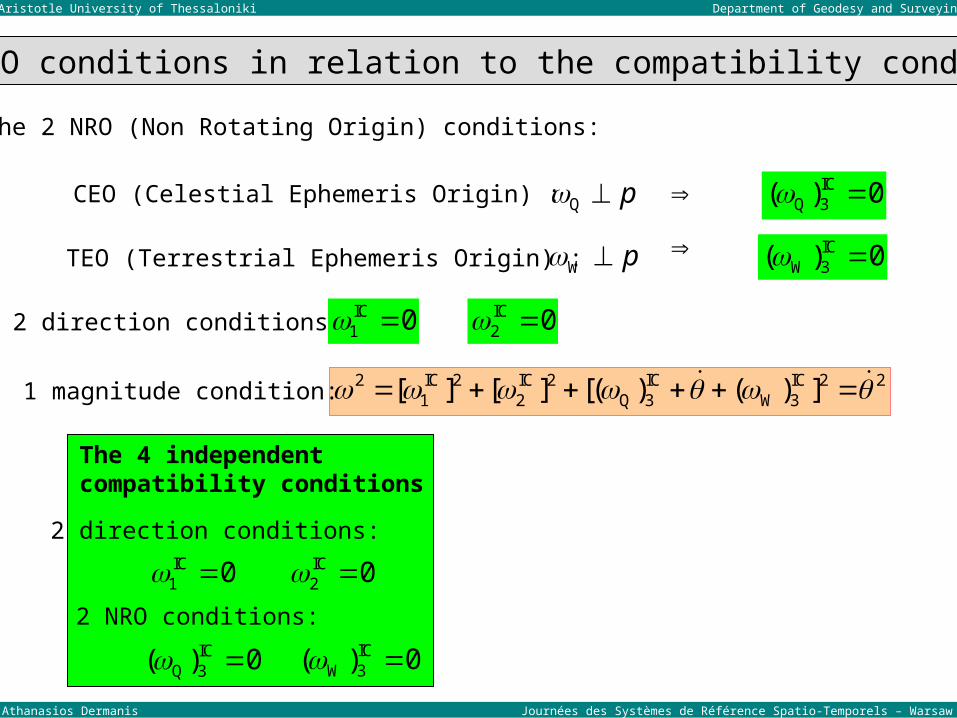
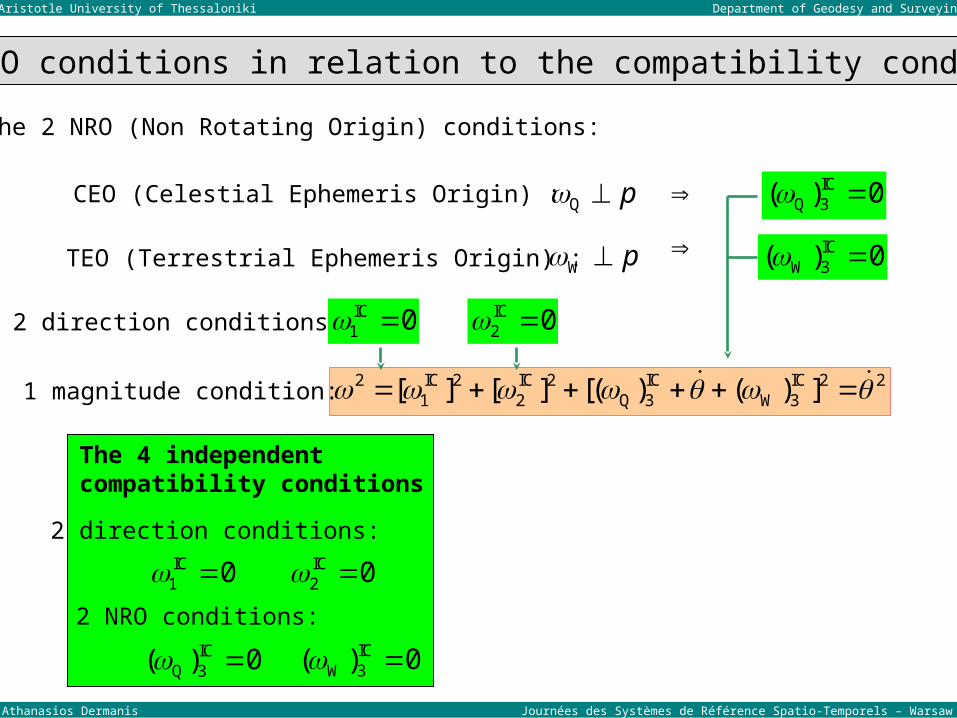
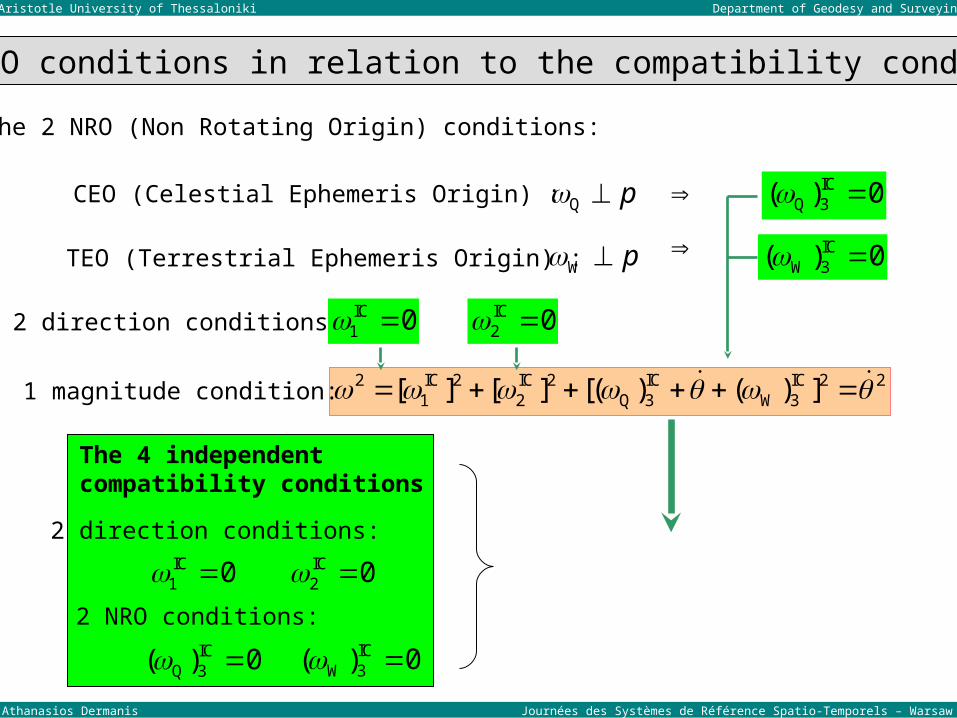
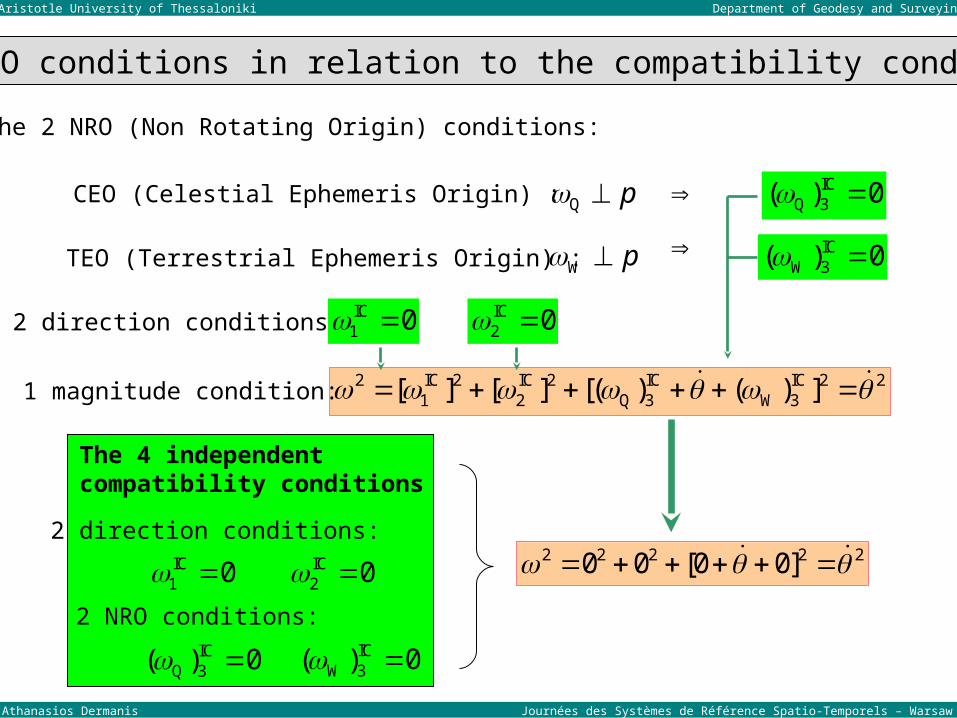
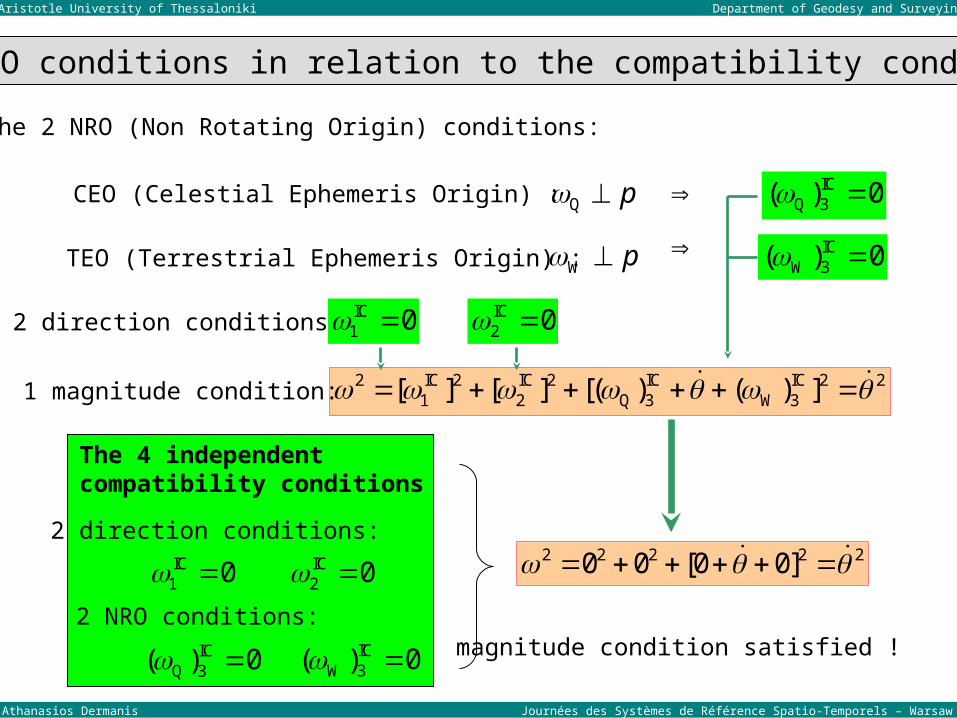
The NRO conditions in relation to the compatibility conditions
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
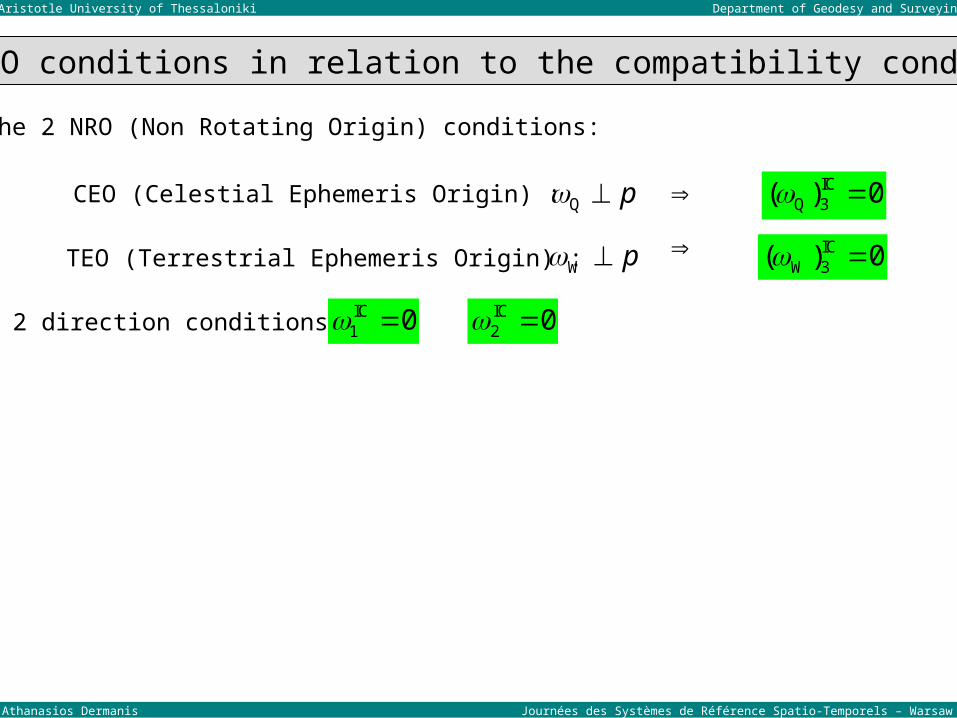
The NRO conditions in relation to the compatibility conditions
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
2 direction conditions:IC1 0 IC
2 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
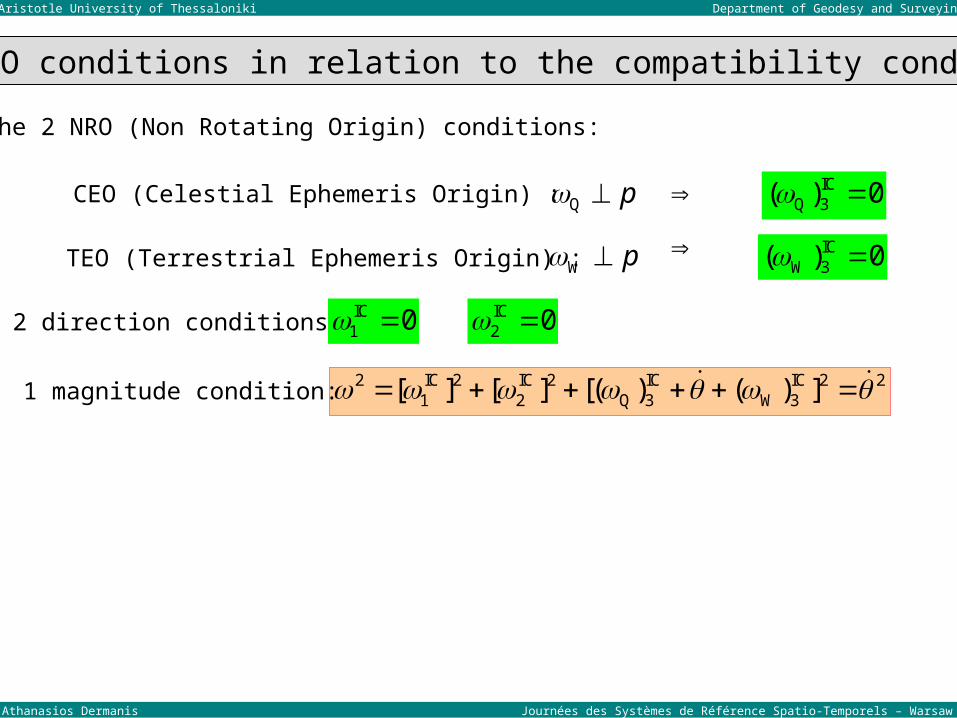
The NRO conditions in relation to the compatibility conditions
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
The NRO conditions in relation to the compatibility conditions
IC1 0 IC
2 0
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The 4 independent compatibility conditions
2 direction conditions:
2 NRO conditions:IC
Q 3( ) 0 ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
The NRO conditions in relation to the compatibility conditions
IC1 0 IC
2 0
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The 4 independent compatibility conditions
2 direction conditions:
2 NRO conditions:IC
Q 3( ) 0 ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
The NRO conditions in relation to the compatibility conditions
IC1 0 IC
2 0
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The 4 independent compatibility conditions
2 direction conditions:
2 NRO conditions:IC
Q 3( ) 0 ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
The NRO conditions in relation to the compatibility conditions
IC1 0 IC
2 0
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The 4 independent compatibility conditions
2 direction conditions:
2 NRO conditions:IC
Q 3( ) 0 ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
2 2 2 2 20 0 [0 0]
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
The NRO conditions in relation to the compatibility conditions
IC1 0 IC
2 0
The 2 NRO (Non Rotating Origin) conditions:
Q p
CEO (Celestial Ephemeris Origin) :
W p
TEO (Terrestrial Ephemeris Origin) :
ICQ 3( ) 0
ICW 3( ) 0
The 4 independent compatibility conditions
2 direction conditions:
2 NRO conditions:IC
Q 3( ) 0 ICW 3( ) 0
2 IC 2 IC 2 IC IC 2 21 2 Q 3 W 3[ ] [ ] [( ) ( ) ]
2 direction conditions:
1 magnitude condition:
IC1 0 IC
2 0
2 2 2 2 20 0 [0 0]
magnitude condition satisfied !
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
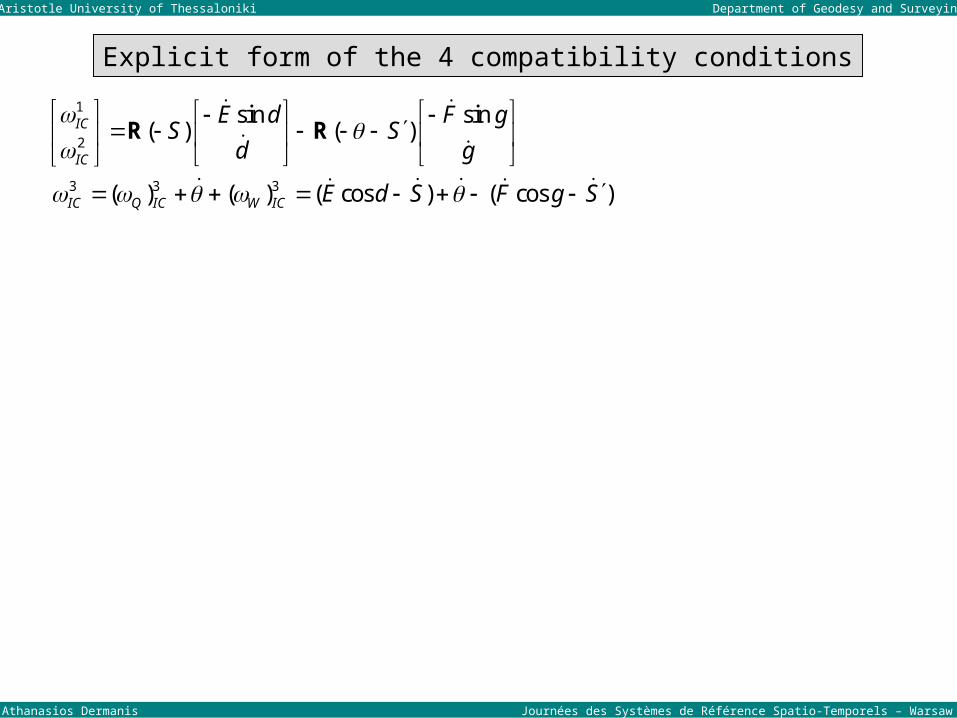
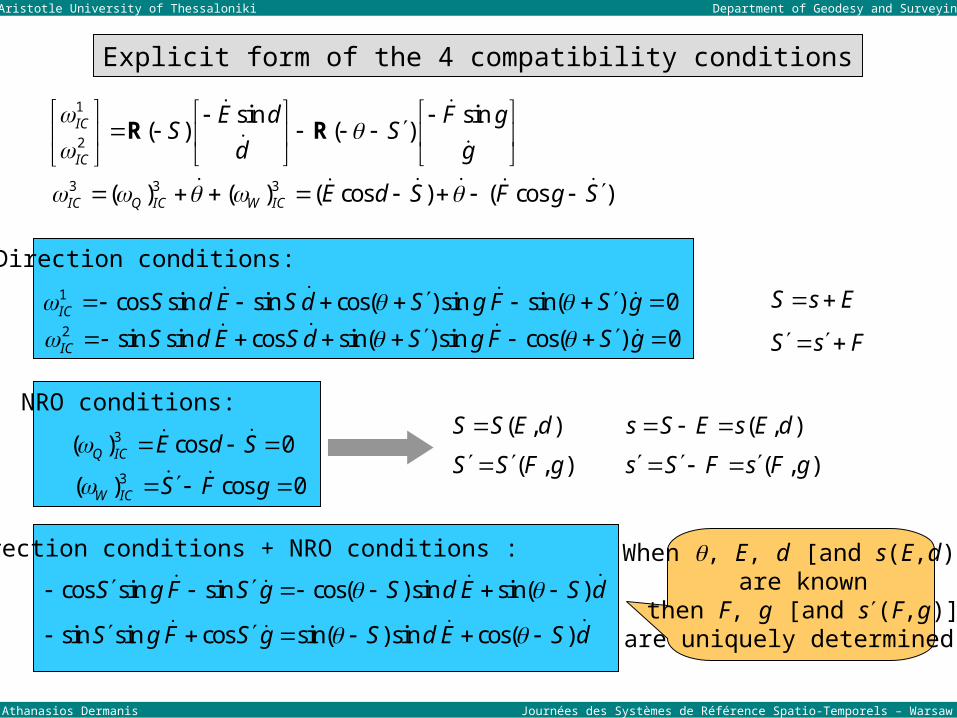
Explicit form of the 4 compatibility conditions
1
2
sin sin( ) ( )IC
IC
E d F gS S
d g
R R
3 3 3( ) ( ) ( cos ) ( cos )IC Q IC W IC E d S F g S
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
S s E
S s F
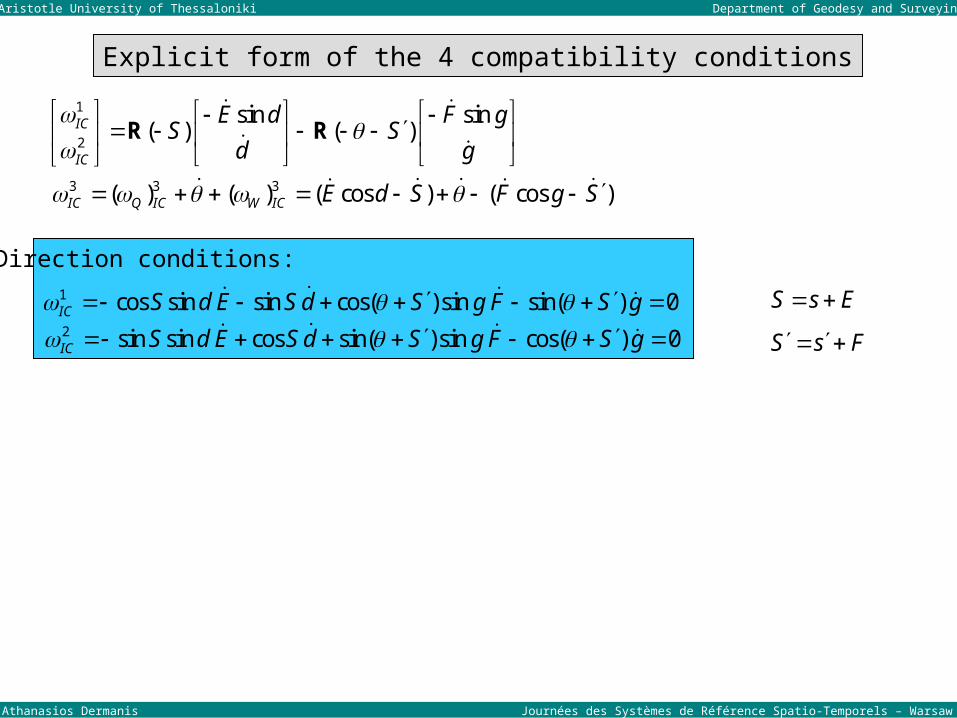
Explicit form of the 4 compatibility conditions
1 cos sin sin cos( )sin sin( ) 0IC S d E S d S g F S g
1
2
sin sin( ) ( )IC
IC
E d F gS S
d g
R R
2 sin sin cos sin( )sin cos( ) 0IC S d E S d S g F S g
Direction conditions:
3 3 3( ) ( ) ( cos ) ( cos )IC Q IC W IC E d S F g S
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
S s E
S s F
Explicit form of the 4 compatibility conditions
1 cos sin sin cos( )sin sin( ) 0IC S d E S d S g F S g
1
2
sin sin( ) ( )IC
IC
E d F gS S
d g
R R
2 sin sin cos sin( )sin cos( ) 0IC S d E S d S g F S g
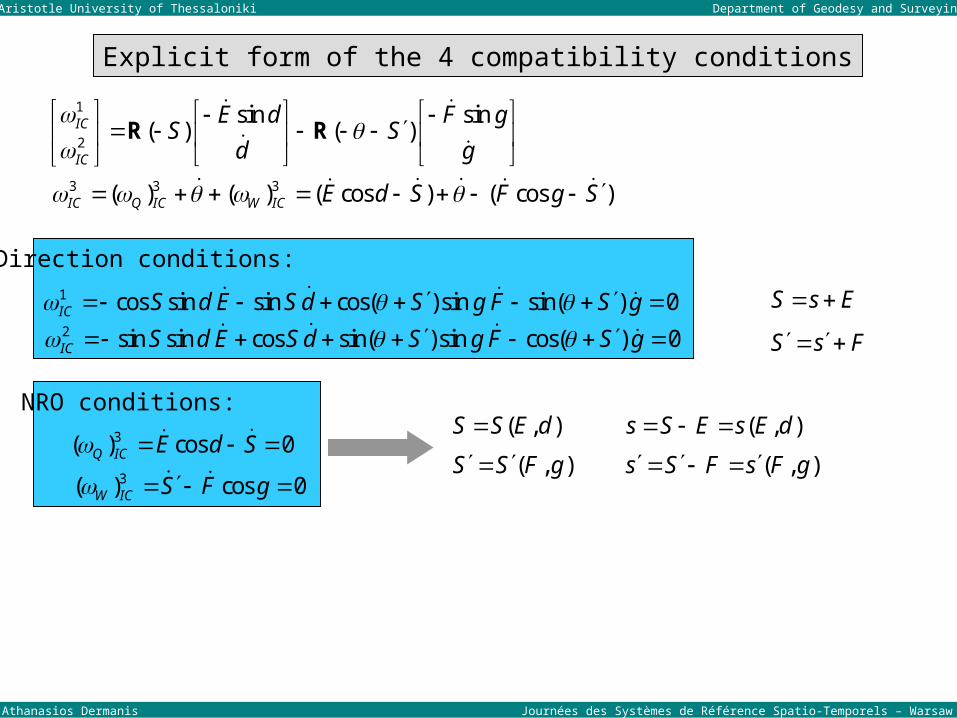
3( ) cos 0Q IC E d S NRO conditions:
Direction conditions:
3 3 3( ) ( ) ( cos ) ( cos )IC Q IC W IC E d S F g S
3( ) cos 0W IC S F g
( , )S S E d
( , )S S F g
( , )s S E s E d
( , )s S F s F g
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
S s E
S s F
Explicit form of the 4 compatibility conditions
1 cos sin sin cos( )sin sin( ) 0IC S d E S d S g F S g
1
2
sin sin( ) ( )IC
IC
E d F gS S
d g
R R
2 sin sin cos sin( )sin cos( ) 0IC S d E S d S g F S g
3( ) cos 0Q IC E d S NRO conditions:
Direction conditions:
3 3 3( ) ( ) ( cos ) ( cos )IC Q IC W IC E d S F g S
3( ) cos 0W IC S F g
cos sin sin cos( )sin sin( )S g F S g S d E S d
Direction conditions + NRO conditions :
( , )S S E d
When , E, d [and s(E,d)] are known
then F, g [and s(F,g)]are uniquely determined !
( , )S S F g
( , )s S E s E d
( , )s S F s F g
sin sin cos sin( )sin cos( )S g F S g S d E S d
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
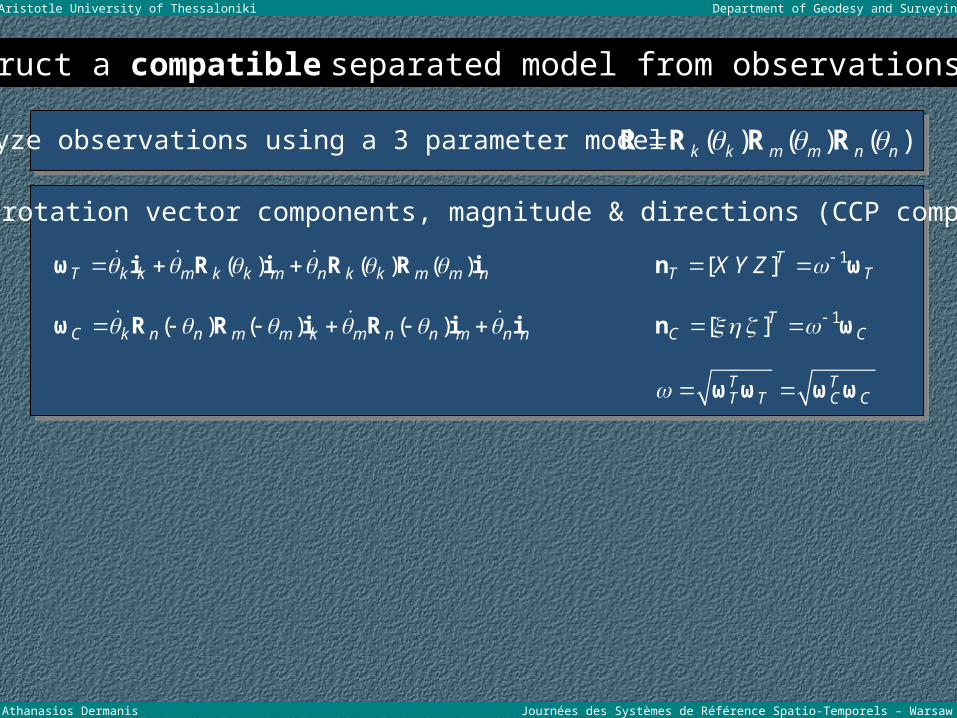
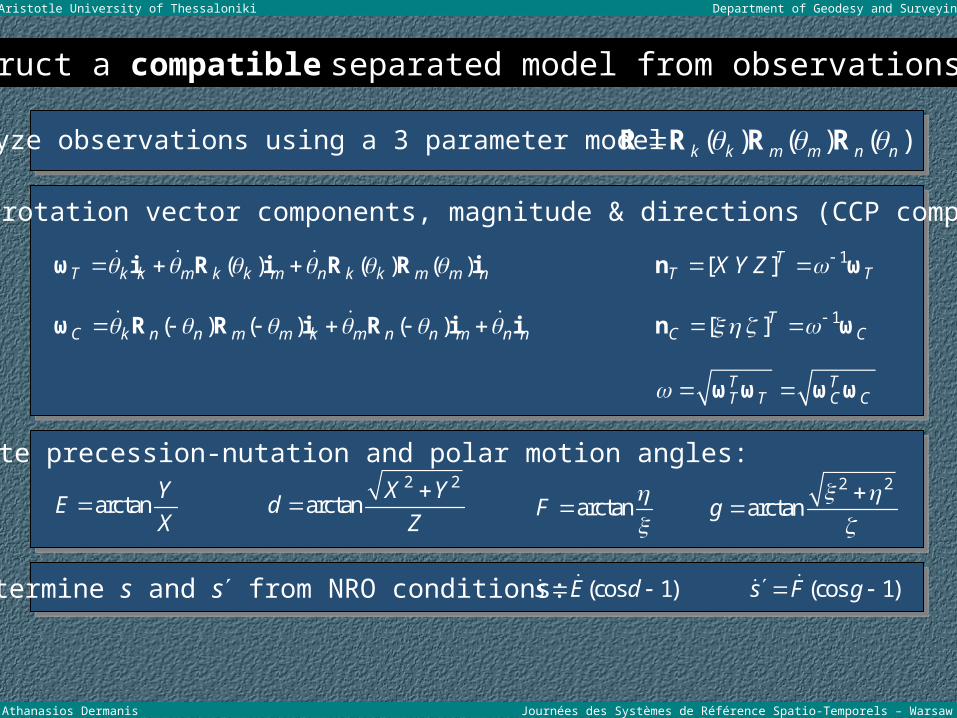
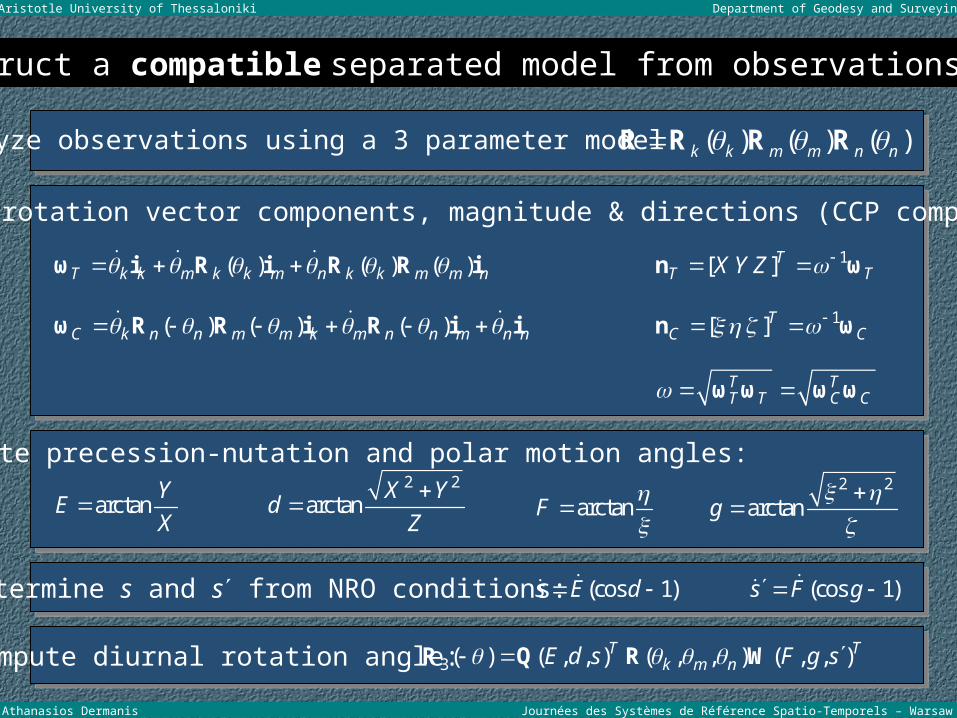
Construct a compatible separated model from observations only
( ) ( ) ( )k k m m n n R R R RAnalyze observations using a 3 parameter model:
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Construct a compatible separated model from observations only
( ) ( ) ( )k k m m n n R R R RAnalyze observations using a 3 parameter model:
( ) ( ) ( )T k k m k k m n k k m m n ω i R i R R i
T TT T C C ω ω ω ω
1[ ]TT TX Y Z n ω
( ) ( ) ( )C k n n m m k m n n m n n ω R R i R i i 1[ ]TC C n ω
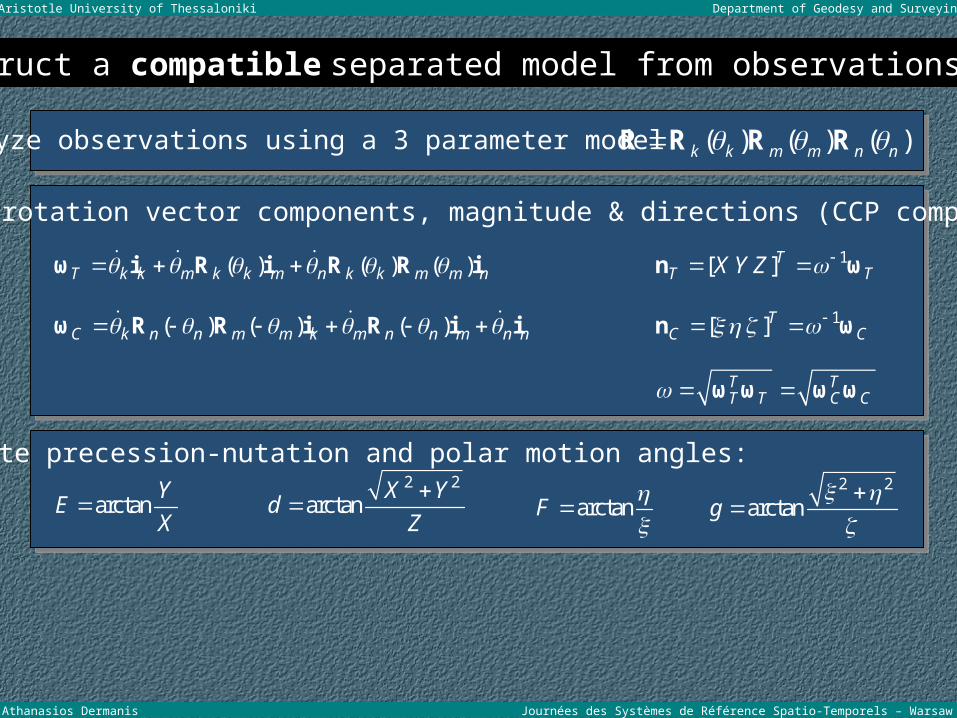
Compute rotation vector components, magnitude & directions (CCP components):
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Construct a compatible separated model from observations only
( ) ( ) ( )k k m m n n R R R RAnalyze observations using a 3 parameter model:
( ) ( ) ( )T k k m k k m n k k m m n ω i R i R R i
T TT T C C ω ω ω ω
1[ ]TT TX Y Z n ω
( ) ( ) ( )C k n n m m k m n n m n n ω R R i R i i 1[ ]TC C n ω
Compute rotation vector components, magnitude & directions (CCP components):
Compute precession-nutation and polar motion angles:
arctanY
EX
2 2
arctanX Y
dZ
arctanF
2 2
arctang
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Construct a compatible separated model from observations only
( ) ( ) ( )k k m m n n R R R RAnalyze observations using a 3 parameter model:
( ) ( ) ( )T k k m k k m n k k m m n ω i R i R R i
T TT T C C ω ω ω ω
1[ ]TT TX Y Z n ω
( ) ( ) ( )C k n n m m k m n n m n n ω R R i R i i 1[ ]TC C n ω
Compute rotation vector components, magnitude & directions (CCP components):
Compute precession-nutation and polar motion angles:
arctanY
EX
2 2
arctanX Y
dZ
arctanF
2 2
arctang
Determine s and s from NRO conditions: (cos 1)s E d (cos 1)s F g
The Aristotle University of Thessaloniki Department of Geodesy and Surveying
Athanasios Dermanis Journées des Systèmes de Référence Spatio-Temporels – Warsaw 2005
Construct a compatible separated model from observations only
( ) ( ) ( )k k m m n n R R R RAnalyze observations using a 3 parameter model:
( ) ( ) ( )T k k m k k m n k k m m n ω i R i R R i
T TT T C C ω ω ω ω
1[ ]TT TX Y Z n ω
( ) ( ) ( )C k n n m m k m n n m n n ω R R i R i i 1[ ]TC C n ω
Compute rotation vector components, magnitude & directions (CCP components):
Compute precession-nutation and polar motion angles:
arctanY
EX
2 2
arctanX Y
dZ
arctanF
2 2
arctang
Compute diurnal rotation angle: 3 ( ) ( , , ) ( , , ) ( , , )T Tk m nE d s F g s R Q R W
Determine s and s from NRO conditions: (cos 1)s E d (cos 1)s F g