characterization of mems deformable mirrors for wavefront control in extreme adaptive optics center...
TRANSCRIPT

Characterization of MEMS Deformable Mirrors for Wavefront Control in
Extreme Adaptive Optics
Center for Adaptive OpticsUniversity of California , Santa CruzLaboratory for Adaptive Optics
Layra RezaResearch Advisor: Scott Severson, Ph.D.
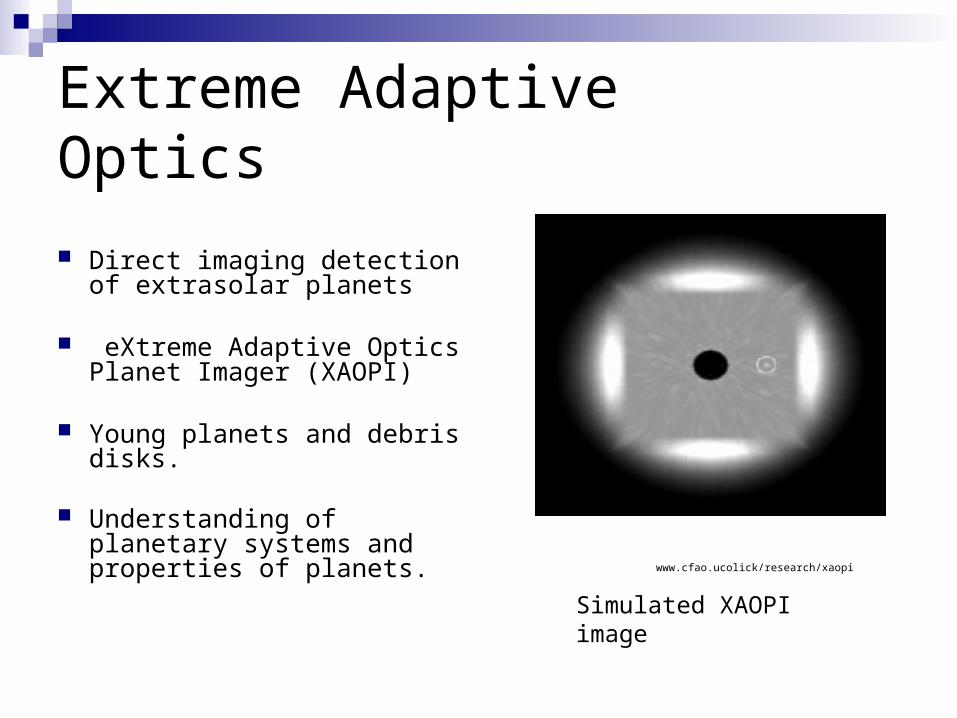
Extreme Adaptive Optics
Direct imaging detection of extrasolar planets
eXtreme Adaptive Optics Planet Imager (XAOPI)
Young planets and debris disks.
Understanding of planetary systems and properties of planets.
www.cfao.ucolick/research/xaopi
Simulated XAOPI image

ExAO Testbed Achieving a contrast level of 107
Wavefront control and low Wavefront RMS error
Characterization of a 1024-actuator MEMS (Micro-Electro-Mechanical-System) deformable mirror

Science Case
2 nm
1 nm
0 nm
5 Jupiter Mass Planet
500 MYr old (Cooling)
15 minute integration on Keck.
Bruce Macintosh

Project Goals•Characterize performance of the 1024 Actuators.
• Use different bias voltages to check for repeatability.
•Find the different types of response.
•Find how the different types of actuators affect wavefront control and error.
http://bifano.bu.edu/tgbifano/Web/BMC_Mirror_Files/13_JSTQE.pdf
http://bifano.bu.edu/tgbifano/Web/BMC_Mirror_Files/24_Electrostatic_effects.pdf
Daren Dillon
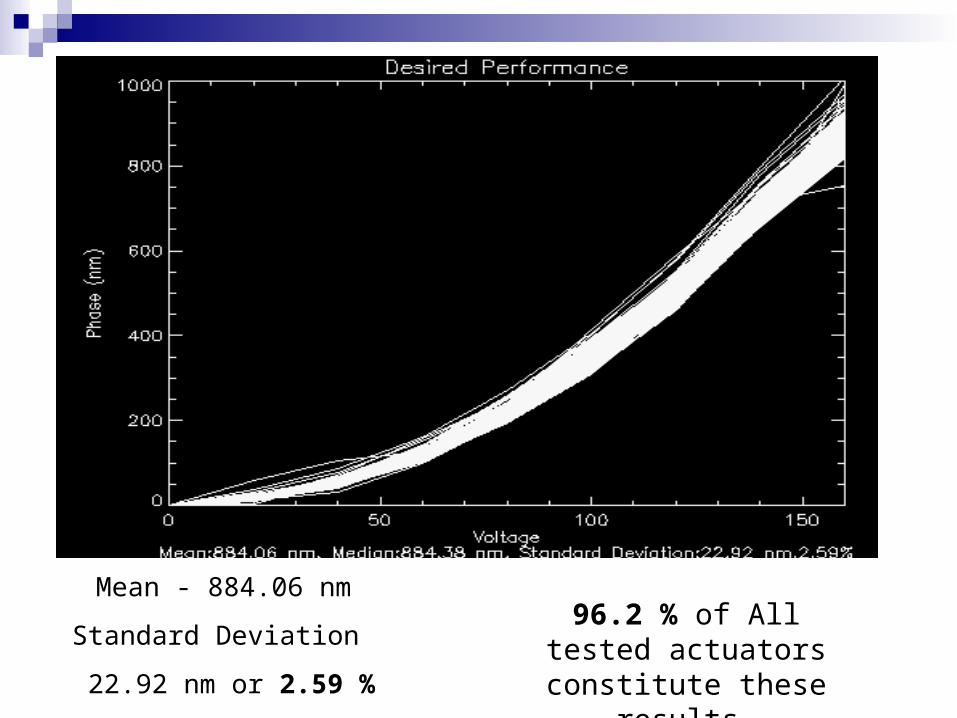
Mean - 884.06 nm
Standard Deviation
22.92 nm or 2.59 %
96.2 % of All tested actuators constitute these
results.

3.8 % of the actuators do not have an adequate performance.
78 % of these are pairs.
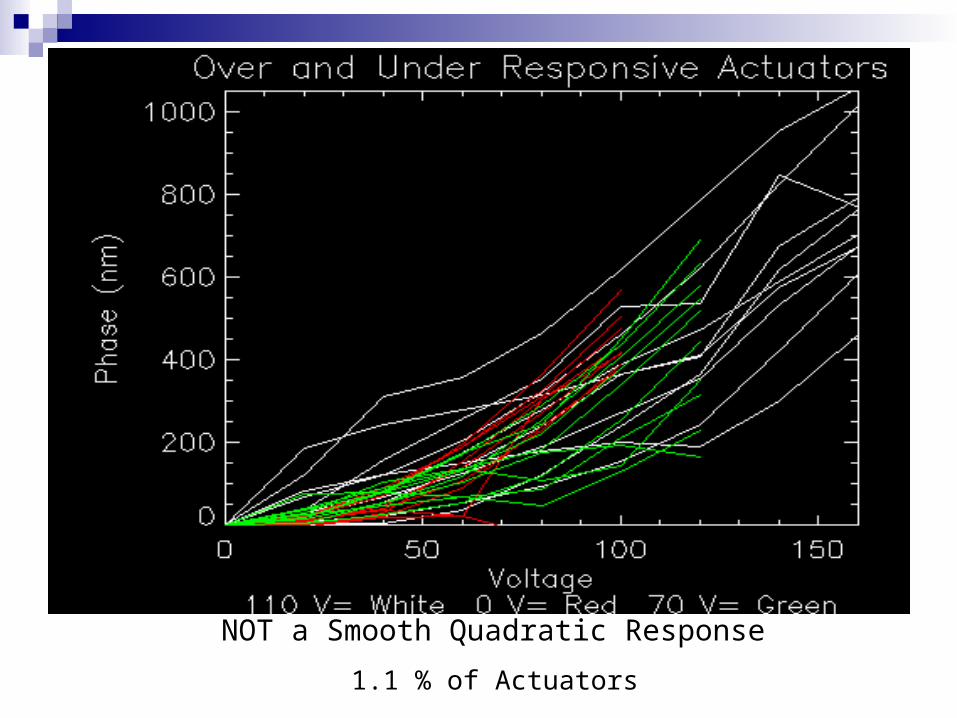
NOT a Smooth Quadratic Response
1.1 % of Actuators
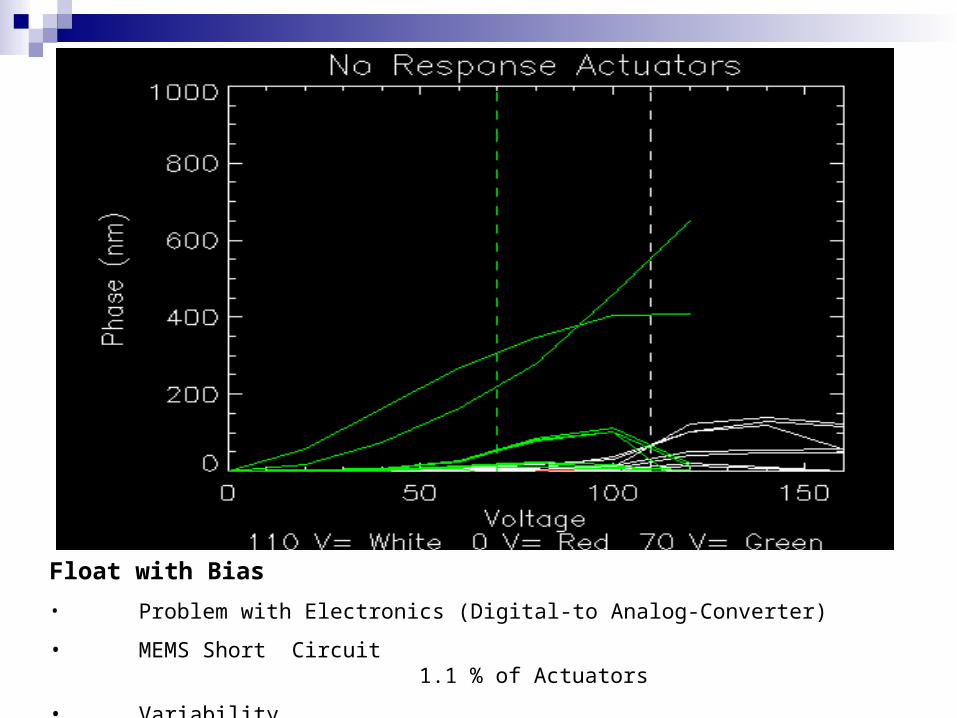
Float with Bias
• Problem with Electronics (Digital-to Analog-Converter)
• MEMS Short Circuit 1.1 % of Actuators
• Variability

Actuators do not move beyond the surface level
• Does the Bias determine the maximum voltage?
• Mechanical Problem 1.6 % of actuators

Wavefront Error
Benefits of Using the Exact Fit for every Actuator
• Fewer Steps to flatten the MEMS DM to within 1 nm
• Smooth Curve

Conclusions There have been 3 different types of misbehaving
actuators identified. Over and Under Responsive No Response No Response after Bias Voltage
Using the exact fit for every actuator makes the flattening of the mirror a faster process.
The next step is to find how every type affects wavefront control and why the different types of bad actuators occur and why they do it in pairs.

Acknowledgements The Laboratory for Adaptive Optics Scott Severson, Ph.D. Katie Morzinski
Darren DillonJulia Wilhelmsen
The Center for Adaptive OpticsMalika BellHilary O'Bryan Lisa Hunter
Emily De La Garza Oscar Azucena Carlos Cabrera
National Science Foundation (Grant #AST-987683)