chapter 4 non-dominated sorting genetic algorithm-ii...
TRANSCRIPT

111
CHAPTER 4
NON-DOMINATED SORTING GENETIC ALGORITHM-II
BASED ROUTE OPTIMIZATION
4.1 OVERVIEW OF NSGA-II
NSGA methodology discussed in Section 3.1 suffers from three
weaknesses: computational complexity, non-elitist approach and the need to
specify a sharing parameter. An improved version of NSGA known as
NSGA-II, which resolved the above problems and uses elitism to create a
diverse Pareto-optimal front, has been subsequently presented (Deb et al
2002). The main features of NSGA-II are low computational complexity,
parameter less diversity preservation, elitism and real valued representation.
NSGA-II implements elitism for multi-objective search, using an
elitism-preserving approach. Elitism is introduced by storing all non-
dominated solutions discovered so far, beginning from the initial population.
Elitism enhances the convergence properties towards the Pareto-optimal set.
A parameter-less diversity preservation mechanism is adopted. Diversity and
spread of solutions are guaranteed without the use of sharing parameters,
since NSGA-II adopts a suitable parameter-less niching approach. It uses the
crowding distance, which estimates the density of solutions in the objective
space, and the crowded comparison operator, which guides the selection
process towards a uniformly spread Pareto-frontier (Basu 2008).

112
In NSGA-II, the offspring population Qt is first created by using the
parent population P t, of size Z. However, instead of finding the non-
dominated front of Qt, the two populations are combined together to form Rt
of size 2Z. Then, non-dominated sorting is used to classify the entire
population Rt. The new population is filled by solutions of different non-
dominated fronts, one at a time. The filling starts with the best non-dominated
front and continues with solutions of the second non-dominated front,
followed by the third, and so on. Since the overall population size of Rt is 2Z,
not all fronts may be accommodated in Z slots available in the new
population. All fronts which could not be accommodated are simply deleted.
When the last allowed front is being considered, there may exist more
solutions in the last front than the remaining slots in the new population.
Instead of arbitrarily discarding some members from the last front, a niching
strategy is used to choose the members from the last front, which reside in the
least crowded region in the front. The algorithm ensures that niching will
choose a diverse set of solutions from this set. When the entire population
converges to the Pareto-optimal front, the continuation of this algorithm will
ensure a better spread among the solutions. The schematic representation of
NSGA-II procedure is shown in Figure 4.1.
Figure 4.1 Schematic of the NSGA-II procedure
P t
Qt
F1
F2
F3
P t+1
Non-dominated
sorting
Crowding
distance sorting
Rejected
Rt

113
4.2 IMPLEMENTATION OF NSGA-II IN ROUTING PROBLEM
A general NSGA-II procedure to be implemented in routing
problem is presented in the following steps:
Step 1: Create a random parent population, P t of size Z.
Step 2: Sort the random parent population based on non-domination.
Step 3: For each non-dominated solution, assign a fitness (rank) equal to its
non-domination level (1 is the best level, 2 is the next best level,
and so on).
Step 4: Create an offspring population, Qt of size Z using binary
tournament selection, recombination, and mutation operators.
Step 5: From the first generation onwards, creation of each new generation
constitutes the following steps:
a) Create the mating pool Rt, of size 2Z by combining the
parent population, Pt and the offspring population, Qt.
b) Sort the combined population, Rt, according to the fast
non-dominated sorting procedure to identify all non-
dominated fronts (Fr1, Fr2, . . . ,Frl).
c) Generate the new parent population, P t+ 1 of size Z by
adding non-dominated solutions starting from the first ranked
non-dominated front, Fr1. When the total non-dominated
solutions exceed the population size Z, reject some of the
lower ranked non-dominated solutions. This is achieved
through a sorting procedure which is done according to the
crowded comparison operator based on the crowding distance.
d) Perform the selection, crossover and mutation operations
on the newly generated parent population, P t+1 to create the
new offspring population, Qt+1 of size Z.
Step 6: Repeat Step 5 until the maximum number of iterations is reached.

114
The flowchart for NSGA-II is shown in Figure 4.2.
Figure 4.2 Flowchart of NSGA-II
Start
No
Selection
Rank population
Evaluation of objective
functions
Evaluation of objective
functions
Stopping criteria met?
Report solution and
stop
Initialize population
(size = Z)
Combine parent and offspring
populations, rank population
Select Z individuals
Yes
Crossover
Mutation

115
4.3 NSGA-II BASED UNICAST ROUTING
4.3.1 Population Initialization
The priority based encoding scheme that is explained in
Section 3.3.1.2 is used to create an initial population P t, of size Z.
4.3.2 Identification of Non-dominated Set
Kung et al’s efficient method is used to identify the non-dominated
solution present in the initial population. Since this method has lesser number
of computations, this method is suitable to find the non-dominated solutions
in the initial population. A detailed explanation about Kung et al’s method is
given in Section 3.3.2.1.
4.3.3 Fitness Assignment
In single-objective optimization, elites are easier to be identified.
They are the better solutions in a population pool. The best elite is the
solution with the best objective value. Since there are many objective
functions in MOO, it is not straightforward, like that in the single objective
case to identify the elites. In such situations, the non-domination ranking is
used. Thus, each member is assigned a fitness (rank) equal to its non-
domination rank, 1 is the best level, 2 is the next best level, and so on.
4.3.3.1 Fast non-dominated sorting approach
NSGA-II uses an explicit diversity-preserving mechanism. In order
to sort a population of size Z according to the level of non-domination, each
solution must be compared with every other solution in the population to find
if it is dominated. First, for each solution, two entities are calculated:
1) y, the number of solutions which dominate the solution y
2) y, the set of solutions, that solution y dominates.

116
The points which have y = 0 is first identified, and placed in a list
Fr1. Fr1 is called the current front. Now, for each solution in the current front,
each member in its set y is visited and its count is reduced by one. In doing
so, for any member, if the count becomes zero, it is put in a separate list H.
When all members of the current front had been checked, the members in the
list Fr1 is declared as members of the first front. Then this process is continued
using the newly identified front H as the current front. The fast non-
dominated sorting procedure which when applied on a population Z returns a
list of the non-dominated fronts Fr. Once the non-dominated sorting is over,
the new population is filled by solutions of different non-dominated fronts,
one at a time. The filling starts with the best non-dominated front and
continues with solutions of the second non-dominated front, followed by the
third and so on. Since overall population is 2Z in Rt, all fronts cannot be
accommodated in Z slots in the new population. All fronts which could not be
accommodated are simply deleted.
4.3.5 Fast Crowded Distance Estimation Procedure
To get an estimate of the density of solutions surrounding a
particular solution in the population, the average distance of two solutions on
either side of a particular solution i along each of the objectives is calculated.
This quantity serves as an estimate of the perimeter of the cuboid formed by
using the nearest neighbours as the vertices. This is called crowding distance,
idistance. In Figure 4.3, the crowding distance of ith
solution in its front (marked
with solid circles) is the average side length of the cuboid (shown by box).
The crowding distance computation requires sorting the population according
to each objective function value in ascending order of magnitude. Thereafter,
for each objective function, the boundary populations are assigned an infinite
distance value. All other intermediate populations are assigned a distance
equal to the absolute normalized difference in the function values of two

117
adjacent populations. This calculation is continued with other objective
functions. The overall crowding distance value is calculated as the sum of
individual distance values corresponding to each objective. Each objective
function is normalized before calculating the crowding distance. The
crowding distance calculation is shown in Figure 4.3.
Figure 4.3 The Crowding distance calculation
The algorithm used to calculate the crowding distance of each point
in the set Fu is given below:
Step 1: The number of solutions in Front Fr is called as v. For each solution
in the set, first assign crowding distance as 0.
Step 2: For each objective function fm, m =1, 2,..., M, sort the set in worse
order of fm or, find the sorted indices vector, Fm = sort (fm, >).
Step 3: For m = 1, 2,..., M, assign a large distance to the boundary
solutions, 1 is the first solution in the front and l is the last solution
in the front, or ml
mFF
dd1
, and for all other solutions j = 2 to (l
– 1), assign:
minmax
)()( 11
1
mm
F
m
F
m
FF ff
ffdd
mv
mv
mv
mv
(4.1)
f2
f1
i + 1
i – 1
i
0
l

118
)( 1m
vF
mf is the m
th objective function value of the (v+1)
th individual in
the set Fr
)( 1m
vF
mf is the m
th objective function value of the (v–1)
th individual in
the set Fr
max
mf is the population-maximum of the mth
objective function
min
mf is the population-minimum of the mth
objective function.
NSGA-II performs a non-dominated sorting of the combined parent
and offspring population. Elitism is introduced by maintaining the best non-
dominated solutions in fronts until all Z population slots are filled. A crowded
distance-based niching strategy is used to find solutions from the last front
that are to be carried over to the next generation.
4.3.6 Crowded-comparison Operator
The crowded-comparison operator guides the selection process at
various stages of the algorithm towards a uniformly spread out Pareto-optimal
front. Every individual in the population has two attributes: non-domination
rank, irank and crowding distance, idistance. A partial order can be defined as
if (irank < jrank ) or ((irank = jrank ) and (idistance = jdistance )) (4.2)
Between two populations with differing non-domination ranks, the
population with the lower rank is preferred. If both populations pertain to the
same front, then the population with larger crowding distance is preferred.
4.3.7 Tournament Selection
Selection mechanism’s role is important in improving the average
quality of the population by passing the high quality chromosomes to the next

119
generation. The individual with the lowest front number is selected if the two
individuals are from different fronts. The individual with the highest
crowding distance is selected if they are from the same front. A higher fitness
is assigned to individuals located on a sparsely populated part of the front. In
each iteration, the existing Z parents generate Z new offspring. Both parents
and offspring compete with each other for inclusion in the next iteration.
4.3.8 Crossover
PMX scheme is used for crossover operation. The reason for doing
so is given in Section 3.3.4.2 of the previous chapter.
4.3.9 Mutation
Mutation is done by single point mutation method, where the
mutation point is selected at random and a random number is replaced at that
particular point.
4.3.10 Stopping Criteria
If the number of iterations exceeds its maximum preset limit of 100
then the algorithm stops.
4.4 EXPERIMENTS AND RESULTS
In order to investigate the capability of NSGA-II algorithm in
solving the QoS routing problem, unicast routing was considered at first,
where the same 20 node sample network shown in Figure 3.3 is taken up for
study. Initially, NSGA-II was applied to minimize two objective functions
cost and delay simultaneously. The algorithm was implemented and 100
simulation runs were conducted to test the effectiveness of the routing
algorithm. For all the runs, the sender was always the first node and the

120
receiver was the twentieth node since that would give the largest number of
possible paths in the network. Table 4.1 shows the set of control parameters
selected after conducting several experiments.
Table 4.1 Control parameters selected for NSGA-II algorithm
Parameter Set value
Population size, Z 30
Number of generations 100
Cross over probability Pc 0.8
Mutation probability Pm 0.1
4.4.1 Pareto-optimal Set
For the sample 20 node network problem shown in Figure 3.3,
NSGA-II was also able to find the 23 non-dominated solutions shown in
Table 3.1, in a single run. This Pareto-optimal set was obtained by taking only
the two objectives cost and delay. The minimum value of cost returned by
NSGA-II was 158 and the minimum delay was 120 seconds.
Further the algorithm was implemented on various network
topologies and various network sizes to test the performance in finding the
Pareto-optimal solutions, the RO, the ET and the scalability. As done in the
previous chapter, the entire group of different networks was split into smaller
size networks (20 to 100 nodes) and larger size networks (200 to 1000 nodes).
The ranges of cost, delay and bandwidth of the links were assumed to be the
same values as in Chapter 3. After performing 100 simulation runs, the best
results achieved by NSGA-II were recorded and they are shown in Tables 4.2
and 4.3 respectively for smaller and larger size networks.
121
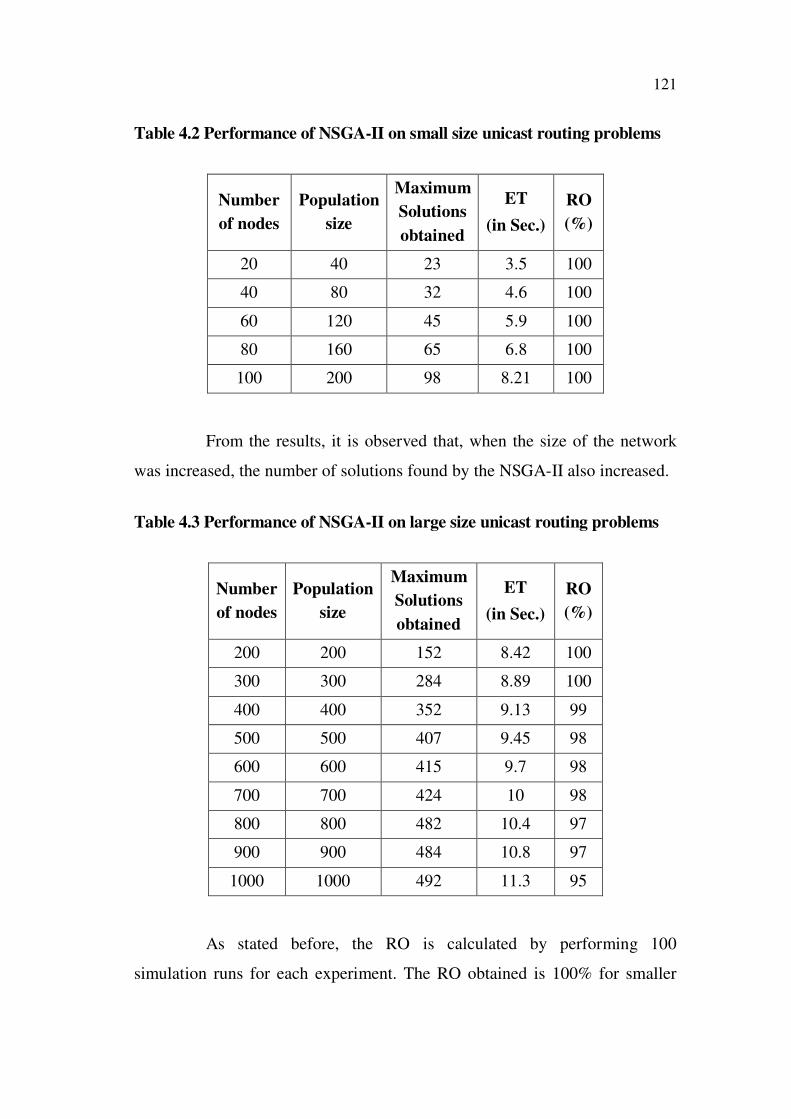
Table 4.2 Performance of NSGA-II on small size unicast routing problems
Number
of nodes
Population
size
Maximum
Solutions
obtained
ET
(in Sec.)
RO
(%)
20 40 23 3.5 100
40 80 32 4.6 100
60 120 45 5.9 100
80 160 65 6.8 100
100 200 98 8.21 100
From the results, it is observed that, when the size of the network
was increased, the number of solutions found by the NSGA-II also increased.
Table 4.3 Performance of NSGA-II on large size unicast routing problems
Number
of nodes
Population
size
Maximum
Solutions
obtained
ET
(in Sec.)
RO
(%)
200 200 152 8.42 100
300 300 284 8.89 100
400 400 352 9.13 99
500 500 407 9.45 98
600 600 415 9.7 98
700 700 424 10 98
800 800 482 10.4 97
900 900 484 10.8 97
1000 1000 492 11.3 95
As stated before, the RO is calculated by performing 100
simulation runs for each experiment. The RO obtained is 100% for smaller

122
size networks that could be noted from Table 4.2. Even up to 300 nodes, the
RO obtained by NSGA –II was 100%, i.e. in all the simulation runs carried
out, the Pareto-optimal solutions were obtained. When the network size
becomes larger, the RO tends to get reduced. Obviously, for the 1000 node
network case, it is only 95%. Figure 4.4 shows the variation of RO with
increase in number of nodes.
Figure 4.4 RO by NSGA-II in large size unicast routing problems
Tables 4.2 and 4.3 give the ET needed by the CPU to identify the
Pareto-optimal set. Its variations against the number of nodes are presented in
Figures 4.5 and 4.6.
200 400 600 800 100092
93
94
95
96
97
98
99
100
101
Number of nodes
Ro
ute
Op
tim
ali
ty
NSGA-II

123
Figure 4.5 ET by NSGA-II in small size unicast routing problems
Figure 4.6 ET by NSGA-II in large size unicast routing problems
200 400 600 800 10005
6
7
8
9
10
11
12
13
14
Number of nodes
Exec
uti
on
Tim
e (s
eco
nd
s)
NSGA-II
20 40 60 80 100 1200
2
4
6
8
10
Number of nodes
Exec
uti
on
Tim
e (s
econ
ds)
NSGA-II

124
When the number of nodes in the network was 20, the ET was 3.5
seconds and when the size of the network was increased, the ET also
increased. For a 100 node network the ET was found to be 8.21 seconds.
When increasing the number the nodes further, it was observed that the ET
also increased. When the maximum network size was taken to be 1000, the
maximum ET was found to be 11.3 seconds. The ET for various network
sizes is plotted in Figure 4.5 and Figure 4.6.
The maximum number of trade-off solutions obtained by the
NSGA-II was found to be 98 when the size of the network had 100 nodes. In
the case of 800 node network, the number of solutions obtained by NSGA-II
is 482 and the number of solutions obtained by NSGA for the same 800 node
network is 475, thus outperforming the latter. For 1000 node network case
too, more number of solutions were identified by NSGA-II, than NSGA.
It could be observed that the improved version of NSGA is a
superior multi-objective optimization tool than NSGA, as far as the quality of
solutions and execution time is concerned. The increase in number of
solutions with respect to the increase in number of nodes is shown in Figure 4.7.
Figure 4.7 Solutions of unicast routing problem identified by NSGA-II
0
100
200
300
400
500
600
Nu
mb
er o
f S
olu
tion
s
Number of nodes
NSGA-II

125
4.5 NSGA-II BASED MULTICAST ROUTING
4.5.1 Population Initialization, Crossover and Mutation
Similar to unicast routing, PBE technique is used here for
population generation. Since flow crossover method is found to be better
when compared to tree crossover, it is used in NSGA-II. Mutation is done by
single point mutation method.
4.6 EXPERIMENTS AND RESULTS
This section analyzes the performance of the NSGA-II in terms of
number of non-dominated solutions identified, the RO, the ET and the
scalability in multicast routing problems. The same simulation environment
was maintained with MATLAB 7.4, software package. The range of cost was
varied from 10 to 250 and the range of delay from 5 to 300. All links were
assumed to have 1.5 Mbps of bandwidth capacity. Control parameters such as
crossover probability and mutation probability were chosen as 0.8 and 0.1
respectively. The multicast group size was fixed as 5 and the maximum
number of iterations was set as 100. Each experiment was conducted 100
times and the average ET and RO are recorded in Table 4.4 and Table 4.5.
Table 4.4 Performance of NSGA-II on small size multicast routing problems
Number
of nodes
Maximum
Solutions
obtained
ET
(in Sec.)
RO
(%)
20 32 9.7 100
40 41 11.4 100
60 53 13.9 100
80 65 15.3 100
100 74 16.2 99

126
Figure 4.8 RO by NSGA-II in small size multicast routing problems
From the results that are tabulated in Table 4.4, it is clear that the
RO obtained by NSGA-II was 100% when the size of the network was varied
from 20 to 80 nodes.
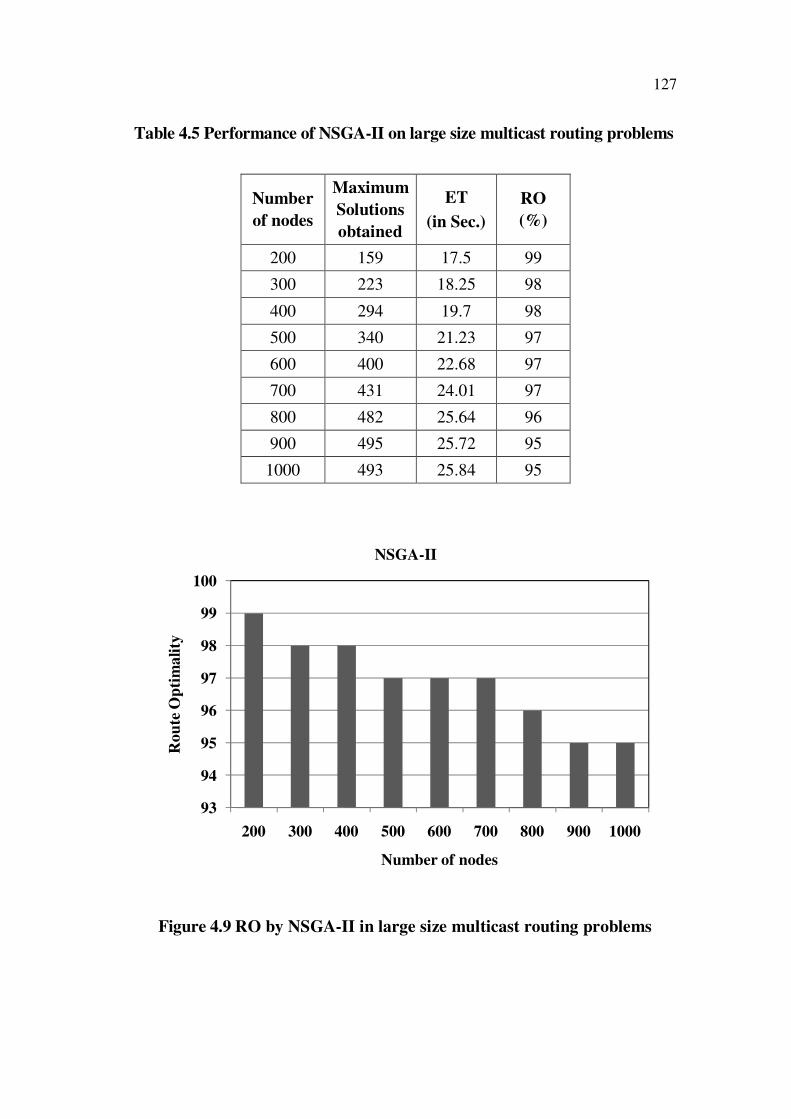
When the number of nodes in the network was increased from 100
to 1000 the RO decreased from 99% to 95%. The worst route optimality
obtained was 95% when the size of the network had maximum number of
nodes considered in this thesis. The variation of RO with increase in number
of nodes is shown in Figure 4.8 and Figure 4.9 for the two groups, smaller and
larger sizes separately.
The ET required by the NSGA-II to obtain the Pareto-optimal set
when the number of nodes in the network was varied from 20 to 100 is given
in Table 4.4. Figure 4.10 shows the ET required by the NSGA-II for various
network sizes. When the number of nodes in the network was increased above
100 up to 1000 nodes the ET required by the NSGA-II to obtain the Pareto-
optimal set is shown in Table 4.5. When the number of nodes in the network
was 20, the ET was 9.7 seconds only.
98.5
99
99.5
100
20 40 60 80 100
Ro
ute
Op
tim
ali
ty
Number of nodes
NSGA-II
127
Table 4.5 Performance of NSGA-II on large size multicast routing problems
Number
of nodes
Maximum
Solutions
obtained
ET
(in Sec.)
RO
(%)
200 159 17.5 99
300 223 18.25 98
400 294 19.7 98
500 340 21.23 97
600 400 22.68 97
700 431 24.01 97
800 482 25.64 96
900 495 25.72 95
1000 493 25.84 95
Figure 4.9 RO by NSGA-II in large size multicast routing problems
93
94
95
96
97
98
99
100
200 300 400 500 600 700 800 900 1000
Ro
ute
Op
tim
ali
ty
Number of nodes
NSGA-II

128
Figure 4.10 ET by NSGA-II in small size multicast routing problems
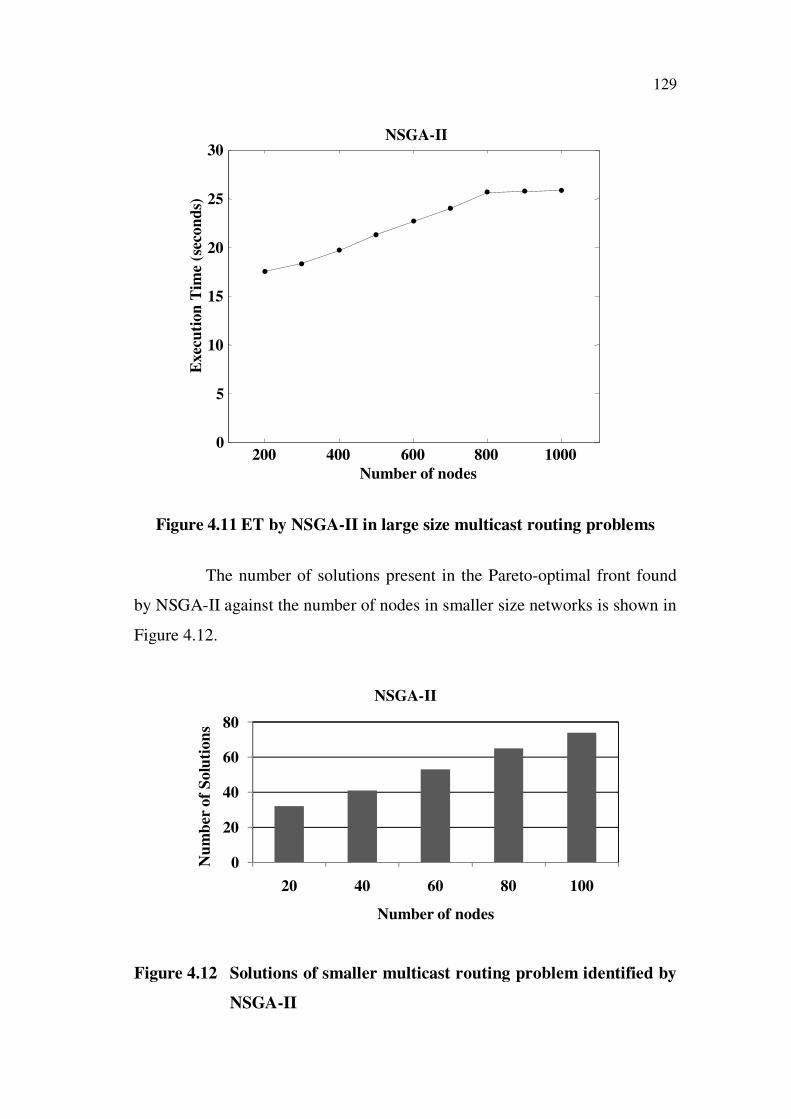
The ET for various network sizes when the number of nodes in the
network was varied from 20 to 100 is plotted in Figure 4.10. Similarly, the ET
for various network sizes when the number of nodes in the network was
varied from 100 to 1000 is plotted in Figure 4.11. From Figures 4.10 and
4.11, it is observed that when the number of nodes in the network is
increased, the ET increases almost exponentially. The maximum ET was
25.84 seconds when the number of nodes in the network was made 1000.
When the number of nodes in the network was equal to 20 in
multicast transmission, the number of Pareto-optimal solutions obtained by
NSGA-II is 32, and when the size of the network was increased till 100 nodes,
the maximum number of solutions identified by NSGA-II also varied till 74
non-dominated solutions, which is evident from Table 4.4.
20 40 60 80 100 1200
5
10
15
20
Number of nodes
Exec
uti
on
Tim
e(s
eco
nd
s)
NSGA-II
129
Figure 4.11 ET by NSGA-II in large size multicast routing problems
The number of solutions present in the Pareto-optimal front found
by NSGA-II against the number of nodes in smaller size networks is shown in
Figure 4.12.
Figure 4.12 Solutions of smaller multicast routing problem identified by
NSGA-II
0
20
40
60
80
20 40 60 80 100
Nu
mb
er o
f S
olu
tio
ns
Number of nodes
NSGA-II
200 400 600 800 10000
5
10
15
20
25
30
Number of nodes
Exec
uti
on
Tim
e (s
econ
ds)
NSGA-II

130
The experiment was repeated by increasing the number of nodes
from 200 to 1000 and the number of solutions obtained by the NSGA-II is
shown in Table 4.5.
Figure 4.13 Solutions of larger multicast routing problem identified by
NSGA-II
4.6.1 Execution Time as a Function of Group Size
In this section the scalability of the algorithm is investigated when
the number of destination nodes (group size) in the network was changed.
When the group size is increased, it increases the traffic in the network routes.
The number of nodes in the network was varied from 20 to 1000 and the
multicast group size was varied as 25%, 35%, 45% and 50% of the total
network size. This experiment also intended to study the performance of the
algorithm in terms of execution time when the destination group sizes were
increased.
The ET required by the NSGA-II to obtain the Pareto-optimal
solutions for various network sizes is given in Table 4.6. When the size of the
network and the size of the multicast group were increased, the ET of NSGA-
II also increased.
0
100
200
300
400
500
600
200 300 400 500 600 700 800 900 1000
Nu
mb
er o
f S
olu
tio
ns
Number of nodes
NSGA-II

131
Table 4.6 Execution Time variation of NSGA-II with different group size
problems
Number
of nodes
ET (in sec.) for Group size
25% 35% 45% 50%
100 16.2 18.6 19.7 22.1
200 17.01 19.4 20.1 23.2
300 18.25 20.21 21.5 25.2
400 19.68 21.43 23.2 27.3
500 21.23 22.65 24.8 28.9
600 22.89 23.78 26.1 29.5
700 23.52 24.36 28.2 33.3
800 25.64 24.98 30.4 35.7
900 29.82 28.1 34.3 39.1
1000 33.48 32.2 38.2 43.8
Figure 4.14 Execution Time variation of NSGA-II with different group
size problems
0 200 400 600 800 1000
10
20
30
40
50
60
Number of nodes
Ex
ecu
tio
n t
ime (
seco
nd
s)
NSGA-II
Group size 25%
Group size 35%
Group size 45%
Group size 50%

132
The Figure 4.14 shows the ET required by NSGA-II to obtain the
Pareto-optimal solutions when the number of nodes in the network and the
multicast group size were also increased. When the ET required by NSGA-II
to find the optimal set is compared with the ET required by NSGA, it is found
that NSGA-II requires lesser time.
4.7 CONCLUSION
In this chapter, NSGA-II approach has been proposed which
optimizes the same four objectives cost, delay, hop count and MLU of QoS
routing problem with flow constraints. The problem has been simulated
separately for unicast transmission and multicast transmission. Using the
control parameters determined in the previous chapter simulation experiments
were conducted to investigate the capability of the algorithm’s problem
solving qualities in terms of quality of solution, route optimality, execution
time and scalability. Numerous experiments were conducted to obtain
sufficient results to compare each other with other MOEAs studied in this
thesis.