chapter 3 segmentation using modified fuzzy c-means...
TRANSCRIPT
45
CHAPTER 3
SEGMENTATION USING MODIFIED FUZZY C-MEANS
CLUSTERING WITH A GENETICALLY OPTIMIZED
APPROACH
3.1 INTRODUCTION
Spatial intensity inhomogeneity in MRI is a major problem in the
computer analysis of MRI data. Intensity inhomogeneity (also termed as the
intensity nonuniformity, the bias field, or the gain field in the literature) arises
from the imperfections of the image acquisition process and manifests itself
as a smooth intensity variation across the image. Because of this
phenomenon, the intensity of the same tissue varies with the location of the
tissue within the image. Although intensity inhomogeneity is in general
hardly noticeable to a human observer, many medical image analysis
methods, such as segmentation and registration, are highly sensitive to the
spurious variations of image intensities.
In this chapter, a novel approach is proposed for fuzzy
segmentation of MRI data in the presence of intensity inhomogeneities. The
proposed method simultaneously estimates the bias field while segmenting
the image. The algorithm is formulated by modifying the objective function of
the standard FCM algorithm to compensate for such inhomogeneities. This
allows the labeling of a pixel to be influenced by the labels in its immediate
neighborhood. The neighborhood effect acts as a regularizer and biases the
solution towards piecewise-homogeneous labeling: such regularization is
46
useful in segmenting scans corrupted by salt and pepper noise. Clustering
algorithms such as FCM, which use calculus-based optimization methods, can
be trapped by local extrema in the process of optimizing the clustering
criterion. They are also very sensitive to initialization. The proposed
algorithm uses GA to optimize the cluster centers in the modified fuzzy ( Jm )
c-means function to avoid local extrema. The performance of the algorithm is
evaluated on simulated and real MR images of the brain.
3.2 MODEL OF INTENSITY INHOMOGENEITY
The observed MRI signal is modeled as a product of the true signal
generated by the underlying anatomy, and a spatially varying factor called the
gain field
k k kY X G k 1, 2,.....N (3.1)
where kX and kY are the true and observed intensities at the kth pixel,
respectively. kG is the gain field at the kth pixel, and N is the total number of
pixels in the MR image.
The application of a logarithmic transformation to the intensities
allows the artifact to be modeled as an additive bias field.
k k ky x k 1,2,.....N (3.2)
where kx and ky are the true and observed log-transformed intensities at the
kth pixel, respectively. k is the bias field at the kth pixel. If the gain field is
known, then it is relatively easy to estimate the tissue class by applying a
47
conventional intensity-based segmenter to the corrected data. Similarly, if the
tissue classes are known, then the gain field can be estimated, but it may be
problematic to estimate either without the knowledge of the other. The tissue
classes and the gain field can be estimated by using an iterative algorithm
based on fuzzy logic.
3.3 FUZZY C-MEANS CLUSTERING
The FCM clustering algorithm assigns a fuzzy membership value to
each data point based on its proximity to the cluster centroids in the feature
space. FCM is a clustering algorithm, but the resulting partition is fuzzy. The
input feature vectors are not assigned exclusively to a single class, but
partially to all classes. If a single class must be chosen, the data point chosen
should be in the class with the higher membership grade. This is called
defuzzification and yields a crisp label. The FCM algorithm assumes that the
number of clusters c is known and minimizes the objective function to find
the best set of cluster centers. The standard FCM objective function for
partitioning 1
Nk k
x
into c clusters is given by
2
1 1
c N pJ u x viik ki k
(3.3)
where 1
ci i
v
are the prototypes of the clusters and the array [ iku ] = U
represents a partition matrix, U u , namely
u 0,1iku 1
1 c
iki
u k
and 0 < 1
N
ikk
u < N i (3.4)

48
The parameter p is a weighing exponent on each fuzzy membership
and determines the amount of fuzziness of the resulting classification. The
FCM objective function is minimized when high membership values are
assigned to pixels whose intensities are close to the centroid of its particular
class, and low membership values are assigned when the pixel data are far
from the centroid.
Given a partition, the cluster centers are calculated using
1
1
, 1
Np
ik kk
i Np
ikk
u xv i c
u
(3.5)
The iteration is then completed by calculating the new partition:
12 / 1
1, 1 , 1
pc
k iik
j k j
x vu i c k N
x v (3.6)
The FCM algorithm for segmenting the image into different
clusters can be summarized in the following steps.
Step1 : Fix c (2…..c<n) and select a value for parameter p and
initialize the cluster centers 1
ci i
v
.
Step2 : Calculate the partition matrix U using equation (3.6).
Step 3 : Update the c centers 1
ci i
v
for each step using
equation (3.5).

49
Step4 : Repeat Step 2-3 till termination. The termination
criterion is as follows:
V Vnew old (3.7)
where . is the Euclidean norm, V is a vector of cluster centers, and is a
small number that can be set by the user.
3.4 BIAS CORRECTED FUZZY C-MEANS (BCFCM)
OBJECTIVE FUNCTION
The standard FCM objective function given in equation (3.3) is
modified by introducing a term that allows the labeling of a pixel to be
influenced by the labels in its immediate neighborhood (Ahmed et al 1999).
The neighborhood effect acts as a regularizer and biases the solution towards
piecewise- homogeneous labeling. Such regularization is useful in segmenting
scans corrupted by salt and pepper noise. The modified objective function is
given by
22
1 11 1 r k
m r ix NR
c N c Np pJ u x v uiik k iki ik kx v
N
(3.8)
where kN stands for the set of neighbors that exist in a window around kx ,
and RN is the cardinality of Nk. The effect of the neighbor’s term is controlled
by the parameter . The relative importance of the regularizing term is
inversely proportional to the SNR of the MRI signal. Lower SNR would
require a higher value of the parameter . Substituting equation (3.2) into
equation (3.8).

50
2 2
1 11 1
c N c Np pJ u y v u y vm r ri iik k k ikN y Ni ik k rR k
(3.9)
Formally, the optimization problem comes in the form
1 1
min , subject to
, ,m
c Ni ki k
J U
U v
u
(3.10)
3.5 PARAMETER ESTIMATION
The objective function mJ can be minimized in a fashion similar to
the standard FCM algorithm. Taking the first derivatives of mJ with respect to
iku , iv and k , and setting them to zero results in three necessary but not
sufficient conditions for mJ to be at a local extrema. In the following
subsections, these three conditions are derived.
3.5.1 Membership Evaluation
The constrained optimization in equation (3.10) is solved using one
Lagrange multiplier
( ) (1 )1 11
c N cp pF u D u um iNik ik ik iki ik R
(3.11)
where, 2
ik ik kD y v and 2
(r k
i y N r r iy v
. The first
derivative of mF with respect to iku is taken and the result is set to zero, for
p >1

51
*
1 0ik ik
p pmik ik ik i
ik R u u
F ppu D uu N
(3.12)
Solving for iku
1( 1)
*
( )
p
ik
ik iR
up D
N
(3.13)
Since 1
1c
jkj
u
k
1( 1)
11
( )
p
c
jjk j
R
p DN
(3.14)
11( 1)
1
1
( )
p
p
c
jjk j
R
p
DN
(3.15)
Substituting into equation (3.13), the zero-gradient condition for
the membership estimator can be rewritten as
1( 1)
1
1ik
p
ik icR
jjk j
R
u
DN
DN
(3.16)

52
3.5.2 Cluster Prototype Updating
The following derivation, uses the standard Euclidean distance. The
derivative of mF with respect to iv is taken and the result is set to zero.
*1 1
0r k i i
N Np p
ik k k i ik r r ik k y NR v v
u y v u y vN
(3.17)
1
11
r k
Np
ik k k r rk y NR
Nip
ikk
u y yN
uv
(3.18)
3.5.3 Bias-Field Estimation
In a similar fashion, the derivative of mF with respect to k is taken
and the result is set to zero
*
2
1 10
k k
c Npik k k i
i kk
u y v
(3.19)
Since only the kth term in the second summation depends on k ,
the equation (3.19) is written as
*
2
10
k k
cpik k k i
i k
u y v
(3.20)
Differentiating the distance expression,
*
1 1 10
k k
c c cp p p
k ik k ik ik ii i i
y u u u v
(3.21)
53
Thus, the zero gradient condition for the bias field estimator is
expressed as
1
1
cp
ik ii
k ckp
iki
u vy
u
(3.22)
3.5.4 BCFCM Algorithm
The BCFCM algorithm for correcting the bias field and segmenting
the image into different clusters can be summarized in the following steps.
Step1 : Select initial class prototypes 1
ci i
v
. Set 1
Nk k
to equal
and very small values (e.g. 0.01).
Step2 : Update the partition matrix using equation (3.16).
Step3 : The prototypes of the clusters are obtained in the form of
weighted averages of the patterns using equation (3.18).
Step 4 : Estimate the bias term using equation (3.22).
Step5 : Repeat Step 2-4 till termination. The termination
criterion is as follows:
V Vnew old (3.23)
where . is the Euclidean norm, V is a vector of cluster centers, and is a
small number that can be set by the user.
54
3.6 GENETICALLY GUIDED CLUSTERING
Initialization has a significant effect on the final partitions obtained
by iterative c-means clustering approaches. The genetically guided clustering
attempts to achieve both avoidance of local extrema and minimal sensitivity
to initialization. On datasets with several local extrema, the GA approach
always avoids the less desirable solutions. In any generation, element i of the
population is Vi, a c s matrix of cluster centers in FCM. The cluster centers
and features are represented by c and s respectively. The initial population of
size P is constructed by a random assignment of real numbers to each of the s
features of the c cluster centers. The initial values are constrained to be in the
range of the feature to which they are assigned, but are otherwise random.
Since only the V’s will be used within the GA it is necessary to reformulate
the objective functions in equations (3.3) and (3.9) for optimization.
Case 1: FCM
To work only with V’s in FCM, equation (3.3) can be rewritten by
substitution for U. Substituting equation (3.6) into equation (3.3) and
rearranging gives the reformulated FCM function (Hall et al 1999).
11/(1 )
( )1 11
ppN cR V Dikik
(3.24)
where 2
ik ikD x v for 1 i c and 1 k N
55
Case 2: BCFCM
To work only with V’s in BCFCM the equation (3.9) can be
rewritten by substitution for U. Substituting equation (3.16) into
equation (3.9), results in the reformulated BCFCM function
11(1 )
1 1( )
p
N c p
m ik ik i R
R V DN
(3.25)
The local (V) minimizers of mR and U at (3.25) produce local
minimizers of mJ , and conversely, the V part of local minimizers of mJ yields
local minimizers of mR .The function mR is optimized with genetically guided
algorithm.
The genetically guided algorithm (GGA) is shown in Figure 3.1. It
consists of selecting parents for reproduction, performing crossover with the
parents and applying mutation to the bits of the children. Crossover is applied
to each cluster center to move quickly towards an extremum thereby
minimizing the required number of generations. An elitist strategy of passing
the two fittest population members to the next generation is used. This
guarantees that the fitness never declines from one generation to the next,
which is often a desirable property in clustering and is useful in tracking
population improvement.
Roulette wheel selection is used to select the parents. Each feature
vij of a cluster center is a real number. To perform crossover, the feature value
is converted into an integer, which captures a three decimal places of
precision and then to a binary string. Two-point crossover is applied to each

56
of the cluster centers of the mating parents generating two offspring. After
every crossover, each bit of the children is considered for mutation, with a
mutation probability pm. Mutation consists of flipping the value of the chosen
bit from 1 to 0 or vice versa.
Step1: Choose p and c.
Step2: Randomly initialize P sets of c cluster centers. Constrain the initial
values to be within the space defined by the vectors to be clustered.
Step3: Calculate R1 or mR using equation (3.24) or (3.25) for each
population member.
Step4: For 1i to number of generations do
Use Roulette wheel selection to select parents for reproduction.
Do two-point crossover and bit wise mutation on each feature of
the parent pairs.
Calculate R1 or Rm using equation (3.24) or (3.25) for each
population member.
Create the new generation of size P from the 2 best members of
the previous generation and the best children that resulted from
crossover and mutation.
Figure 3.1 The genetically guided algorithm
3.7 RESULTS AND DISCUSSION
The simulated and real MR brain images are used for validating the
segmentation methods. The 20 simulated brain images are obtained from
Brainweb database at the Mc Connell Brain Imaging Center of the Montreal
Neurological Institute, McGill University (Cocosco et al 1997, Kwan et al
1999, Collins et al 1998). This site also provides the ground-truth that enables
57
one to obtain a quantitative assessment of the performance of the algorithm.
This database contains a set of realistic MRI data volumes produced by an
MRI simulator. It provides full 3-dimensional data volumes using three
sequences (T1-, T2-, and proton-density- (PD-) weighted) and a variety of
slice thicknesses, noise levels, and levels of intensity non-uniformity. These
data are available for viewing in three orthogonal views (transversal, sagittal,
and coronal). T1 weighted MR brain images in axial view are used in this
work for segmentation.
The cerebrum is extracted from the brain images using
morphological image processing techniques before applying the clustering
algorithm. In the implementation of BCFCM, parameter is set as 0.7, p=2,
NR =9 (3 3 window centered around each pixel) and ε =0.01. For low SNR
images is set as 0.85. The FCM/BCFCM algorithm gets trapped in local
extrema when initial clusters are not properly chosen. In 50 runs of
FCM/BCFCM with random initializations of cluster centers, all of them
apparently result in degenerate partitions consisting of just one class. To
obtain some nondegenerate partitions a different type of less random
initialization is used. In this initialization scheme, the cluster centers are
constrained to be in the range of the feature to which they are assigned. This
forces each cluster center to be distinct.
The GGA is used to optimize FCM and BCFCM. A population of
twenty chromosomes is randomly generated. Each center is represented in
8 bits. Roulette wheel selection method is used to select the mating pool,
which holds the parents that generate offspring. Two point crossover is
applied to the cluster centers of the mating parents generating two offspring
with a crossover probability pc=0.9. After every crossover, each bit of the
children is considered for mutation with a mutation probability pm=0.01.

58
The fitness function is inverse of R1(V) in case of GGFCM and inverse of
Rm(V) in case of GGBCFCM. The number of generations is used as the
stopping criteria for GGA.
The segmentation algorithms are run for various levels of noise and
intensity inhomogeneity. The Gaussian noise in the simulated images has
Rayleigh statistics in the background and Rician statistics in the signal regions.
The “percent noise” number represents the percent ratio of the standard
deviation of the white Gaussian noise versus the signal for a reference tissue
(white matter). For a 20% level of intensity inhomogeneity, the multiplicative
field has a range of values of 0.90 … 1.10 over the brain area. For other
intensity inhomogeneity levels, the field is linearly scaled accordingly (for
example, to a range of 0.80 … 1.20 for a 40% level).
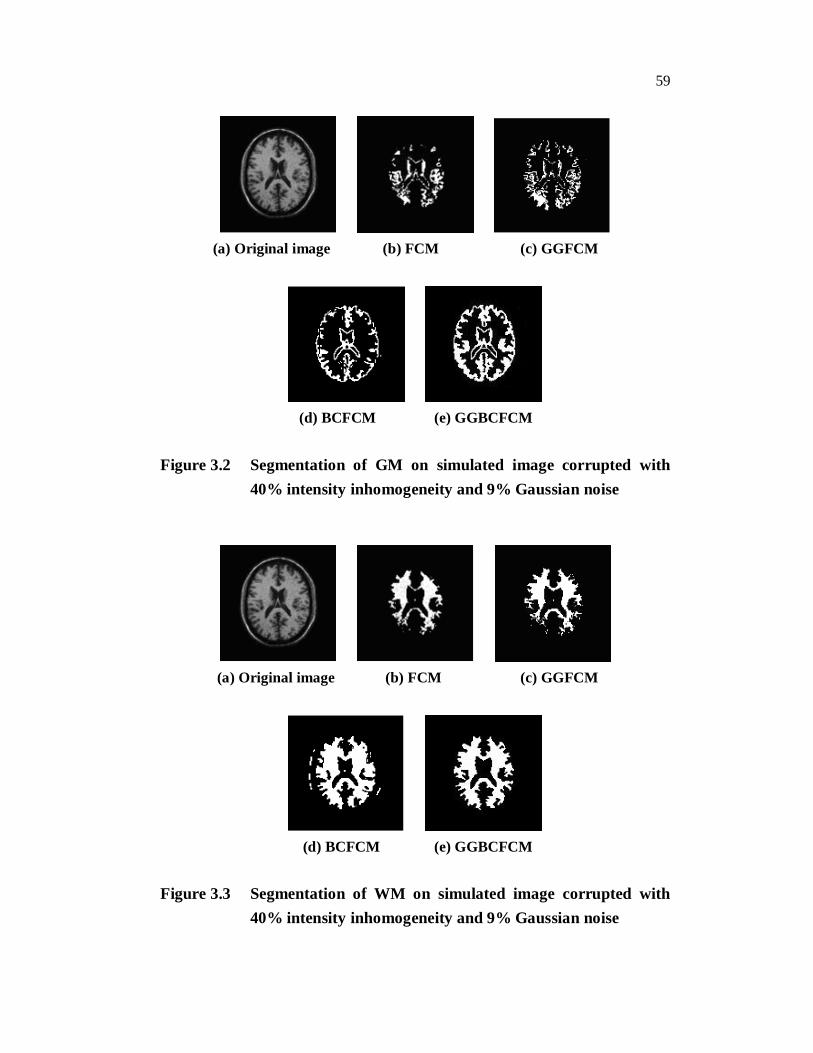
The segmentation results of FCM, GGFCM, BCFCM and
GGBCFCM when applied on T1 weighted simulated MR image corrupted
with 40% intensity inhomogeneity and 9% Gaussian noise are presented in
Figures 3.2 to 3.5. The clustering algorithms segment the image into four
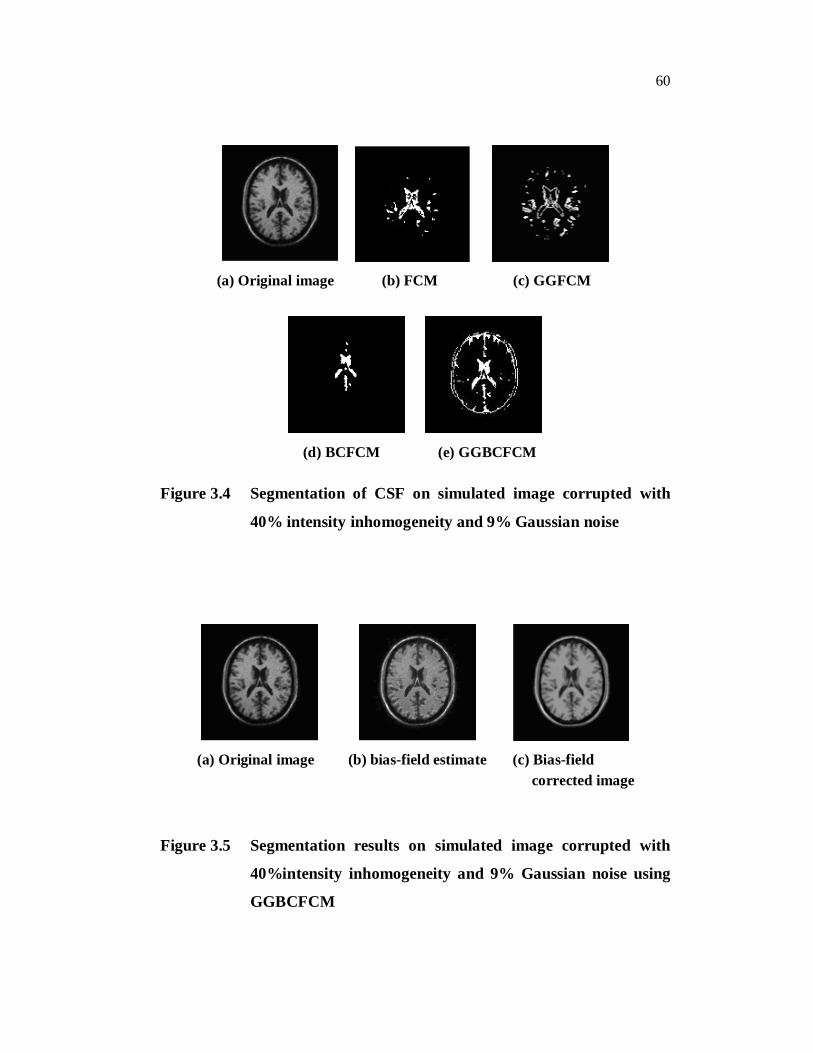
classes corresponding to GM, WM, CSF, and background. Figure 3.5(b)
shows the estimate of the multiplicative gain. This image was obtained by
scaling the values of the bias field from one to 255. Figure 3.5(c) depicts the
corrected image.
59
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM Figure 3.2 Segmentation of GM on simulated image corrupted with
40% intensity inhomogeneity and 9% Gaussian noise
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM Figure 3.3 Segmentation of WM on simulated image corrupted with
40% intensity inhomogeneity and 9% Gaussian noise
60
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM
Figure 3.4 Segmentation of CSF on simulated image corrupted with
40% intensity inhomogeneity and 9% Gaussian noise
(a) Original image (b) bias-field estimate (c) Bias-field corrected image
Figure 3.5 Segmentation results on simulated image corrupted with
40%intensity inhomogeneity and 9% Gaussian noise using
GGBCFCM
61
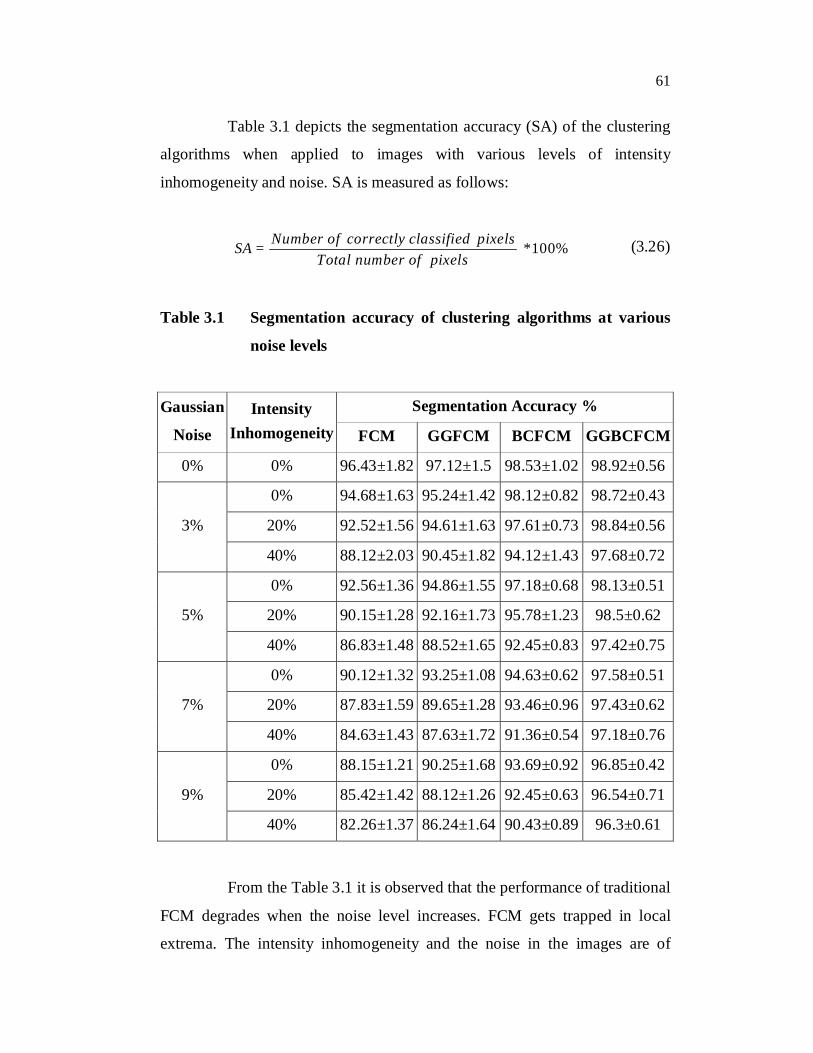
Table 3.1 depicts the segmentation accuracy (SA) of the clustering
algorithms when applied to images with various levels of intensity
inhomogeneity and noise. SA is measured as follows:
*100%Number of correctly classified pixelsSA =Total number of pixels
(3.26)
Table 3.1 Segmentation accuracy of clustering algorithms at various
noise levels
Gaussian
Noise Intensity
Inhomogeneity
Segmentation Accuracy %
FCM GGFCM BCFCM GGBCFCM
0% 0% 96.43±1.82 97.12±1.5 98.53±1.02 98.92±0.56
3%
0% 94.68±1.63 95.24±1.42 98.12±0.82 98.72±0.43
20% 92.52±1.56 94.61±1.63 97.61±0.73 98.84±0.56
40% 88.12±2.03 90.45±1.82 94.12±1.43 97.68±0.72
5%
0% 92.56±1.36 94.86±1.55 97.18±0.68 98.13±0.51
20% 90.15±1.28 92.16±1.73 95.78±1.23 98.5±0.62
40% 86.83±1.48 88.52±1.65 92.45±0.83 97.42±0.75
7%
0% 90.12±1.32 93.25±1.08 94.63±0.62 97.58±0.51
20% 87.83±1.59 89.65±1.28 93.46±0.96 97.43±0.62
40% 84.63±1.43 87.63±1.72 91.36±0.54 97.18±0.76
9%
0% 88.15±1.21 90.25±1.68 93.69±0.92 96.85±0.42
20% 85.42±1.42 88.12±1.26 92.45±0.63 96.54±0.71
40% 82.26±1.37 86.24±1.64 90.43±0.89 96.3±0.61
From the Table 3.1 it is observed that the performance of traditional
FCM degrades when the noise level increases. FCM gets trapped in local
extrema. The intensity inhomogeneity and the noise in the images are of
62
sufficient magnitude and cause the distributions of signal intensities
associated with the tissue classes to overlap significantly. GGFCM slightly
improves the performance of FCM. BCFCM which uses the neighborhood
effect is better than GGFCM.
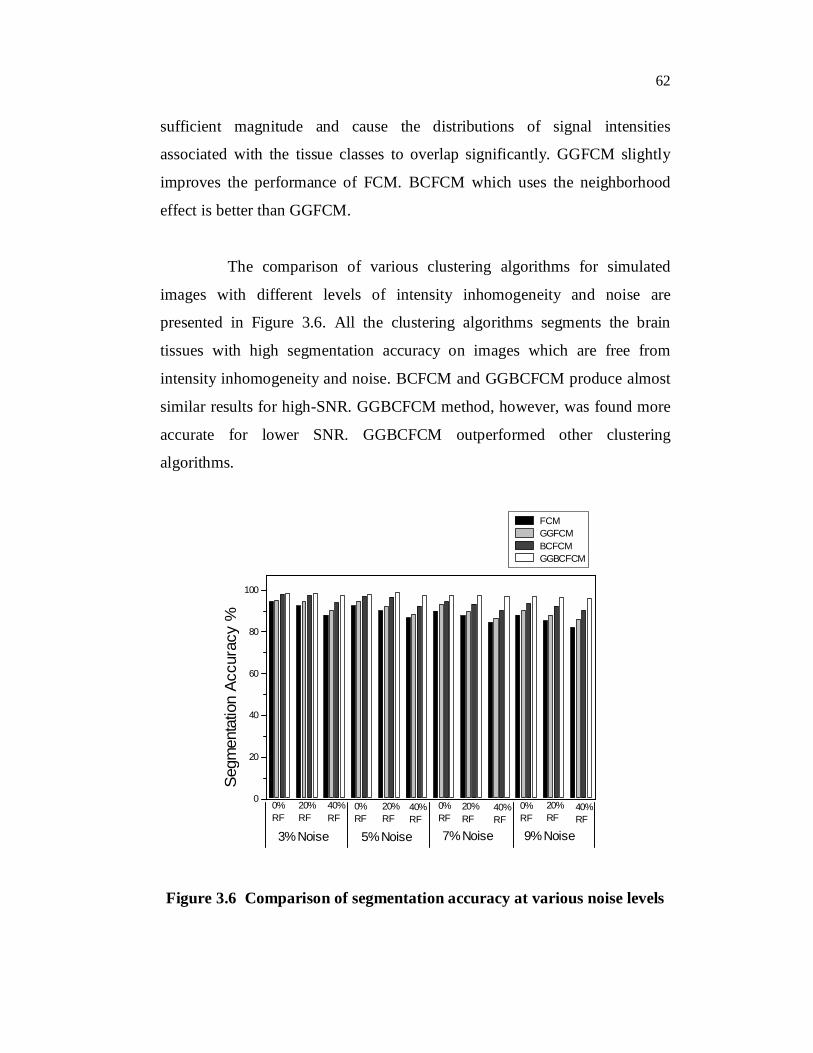
The comparison of various clustering algorithms for simulated
images with different levels of intensity inhomogeneity and noise are
presented in Figure 3.6. All the clustering algorithms segments the brain
tissues with high segmentation accuracy on images which are free from
intensity inhomogeneity and noise. BCFCM and GGBCFCM produce almost
similar results for high-SNR. GGBCFCM method, however, was found more
accurate for lower SNR. GGBCFCM outperformed other clustering
algorithms.
0
20
40
60
80
100
9% Noise7% Noise5% Noise3% Noise
40% RF
20% RF
0% RF
40% RF
20% RF
0% RF
40% RF
20% RF
0% RF
40% RF
20% RF
0% RF
Segm
enta
tion
Accu
racy
%
FCM GGFCM BCFCM GGBCFCM
Figure 3.6 Comparison of segmentation accuracy at various noise levels
63
The 20 real MRI brain data sets and their manual segmentation are
obtained from the Internet Brain Segmentation repository (IBSR) (IBSR
2004) of the Center for Morphometric Analysis at Massachusetts General
Hospital. The coronal three-dimensional T1-weighted spoiled gradient echo
MRI scans were performed on two different imaging systems. Ten Fast low-
angle shot (FLASH) scans on four males and six females were performed on a
1.5 tesla Siemens Magnetom MR System with the following parameters: TR
= 40 msec, TE = 8 msec, flip angle = 50 degrees, field of view = 30 cm, slice
thickness = contiguous 3.1 mm, matrix = 256 256. Ten scans on six males
and four females were performed on a 1.5 tesla General Electric Signa MR
System, with the following parameters: TR = 50 msec, TE = 9 msec, flip
angle = 50 degrees, field of view = 24 cm, slice thickness = contiguous
3.0mm, matrix = 256 256. Several researchers have used the Brainweb and
IBSR database as benchmark to validate their segmentation methods (Kapur
et al 1996, Cocosco et al 2003, Peng et al 2005, Ferreira da silva 2007).
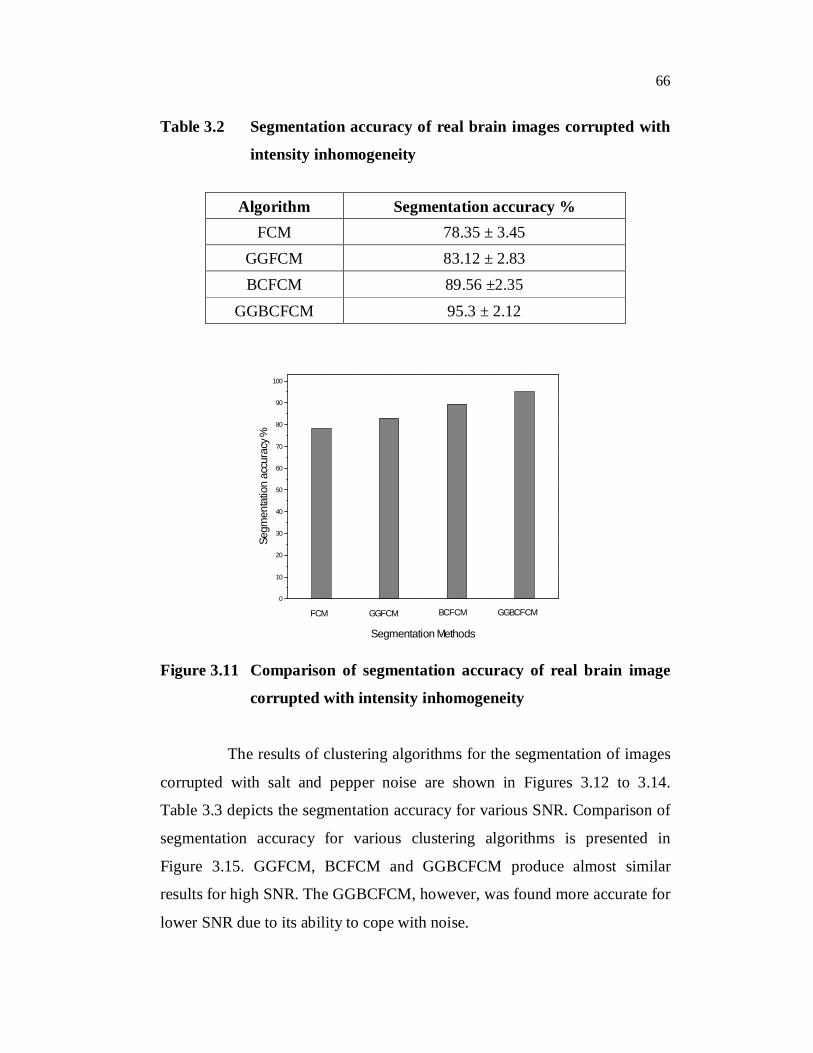
Figures 3.7 to 3.10 show the results of applying the various
clustering algorithms to segment a real MR image. Table 3.2 depicts the
segmentation accuracy and the results of various clustering algorithms are
compared in Figure 3.11. GGBCFCM is found to be more accurate than
BCFCM and GGFCM.

64
(a) Original image (b) Extracted (c) FCM cerebrum image
(d) GGFCM (e) BCFCM (f) GGBCFCM
Figure 3.7 Segmentation of GM on real brain image corrupted with intensity inhomogeneity
(a) Original image (b) Extracted (c) FCM cerebrum image
(d) GGFCM (e) BCFCM (f) GGBCFCM Figure 3.8 Segmentation of WM on real brain image corrupted with
intensity inhomogeneity
65
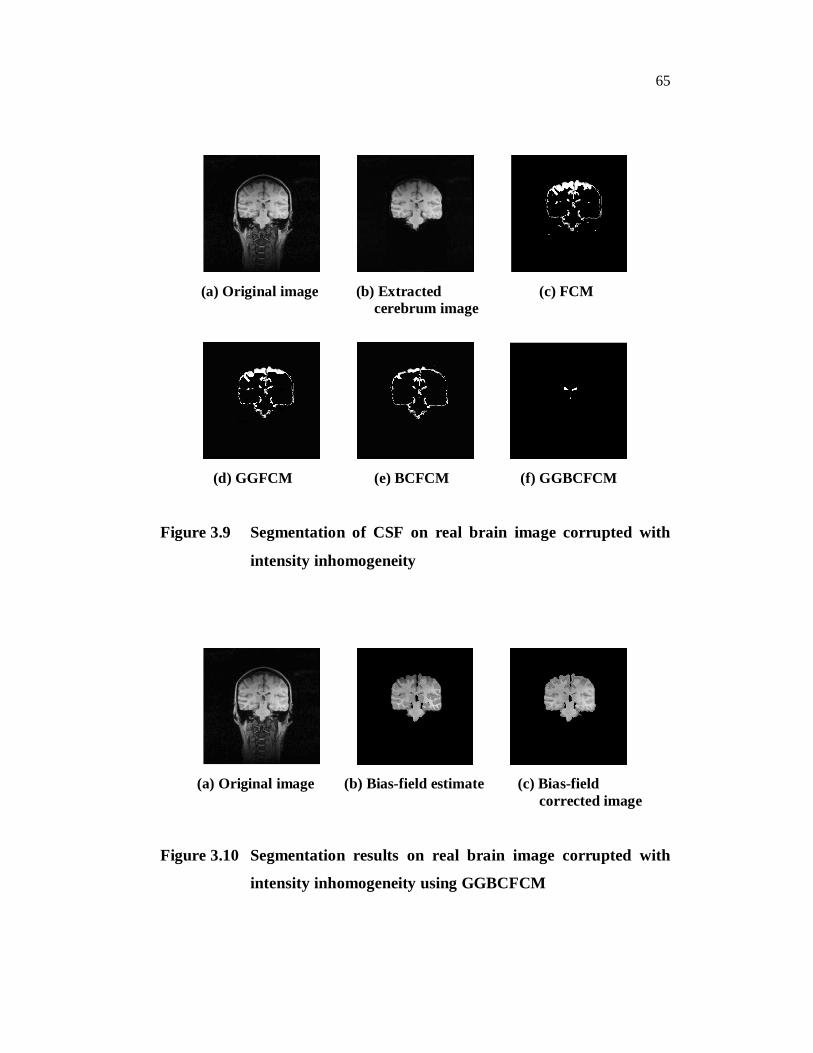
(a) Original image (b) Extracted (c) FCM cerebrum image
(d) GGFCM (e) BCFCM (f) GGBCFCM
Figure 3.9 Segmentation of CSF on real brain image corrupted with
intensity inhomogeneity
(a) Original image (b) Bias-field estimate (c) Bias-field corrected image
Figure 3.10 Segmentation results on real brain image corrupted with
intensity inhomogeneity using GGBCFCM
66
Table 3.2 Segmentation accuracy of real brain images corrupted with
intensity inhomogeneity
Algorithm Segmentation accuracy % FCM 78.35 ± 3.45
GGFCM 83.12 ± 2.83 BCFCM 89.56 ±2.35
GGBCFCM 95.3 ± 2.12
0
10
20
30
40
50
60
70
80
90
100
GGBCFCMBCFCMGGFCMFCM
Segm
enta
tion
accu
racy
%
Segmentation Methods
Figure 3.11 Comparison of segmentation accuracy of real brain image
corrupted with intensity inhomogeneity
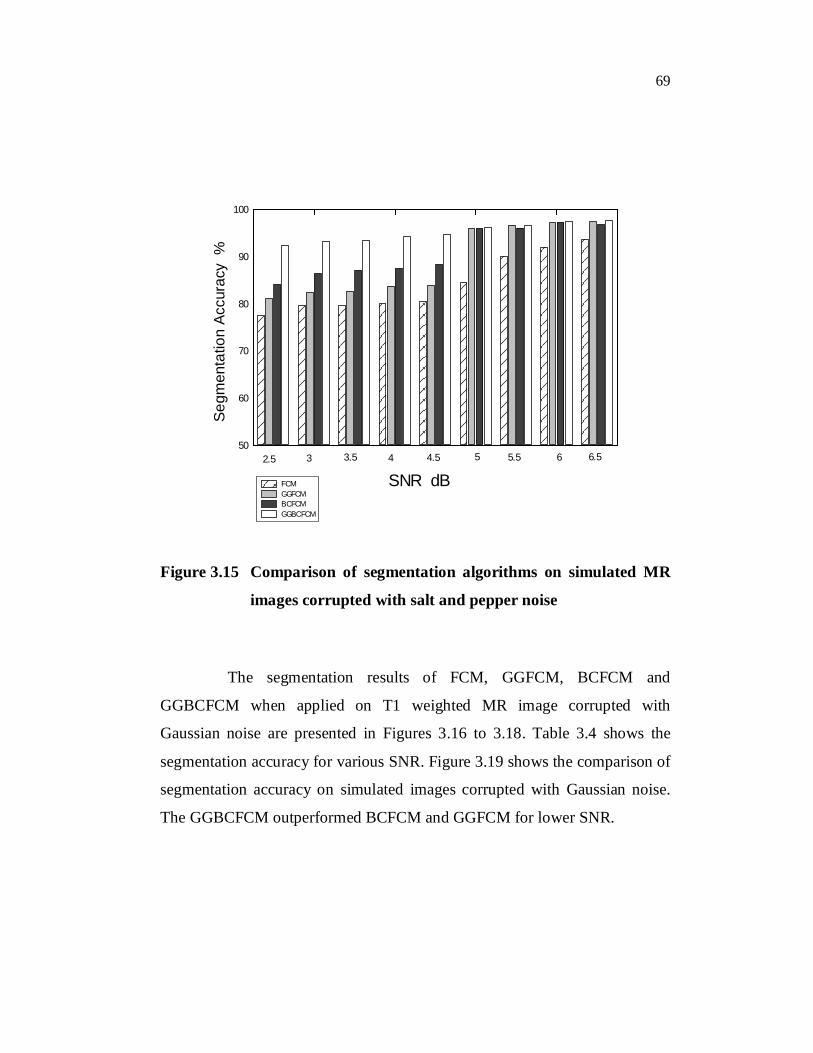
The results of clustering algorithms for the segmentation of images
corrupted with salt and pepper noise are shown in Figures 3.12 to 3.14.
Table 3.3 depicts the segmentation accuracy for various SNR. Comparison of
segmentation accuracy for various clustering algorithms is presented in
Figure 3.15. GGFCM, BCFCM and GGBCFCM produce almost similar
results for high SNR. The GGBCFCM, however, was found more accurate for
lower SNR due to its ability to cope with noise.
67
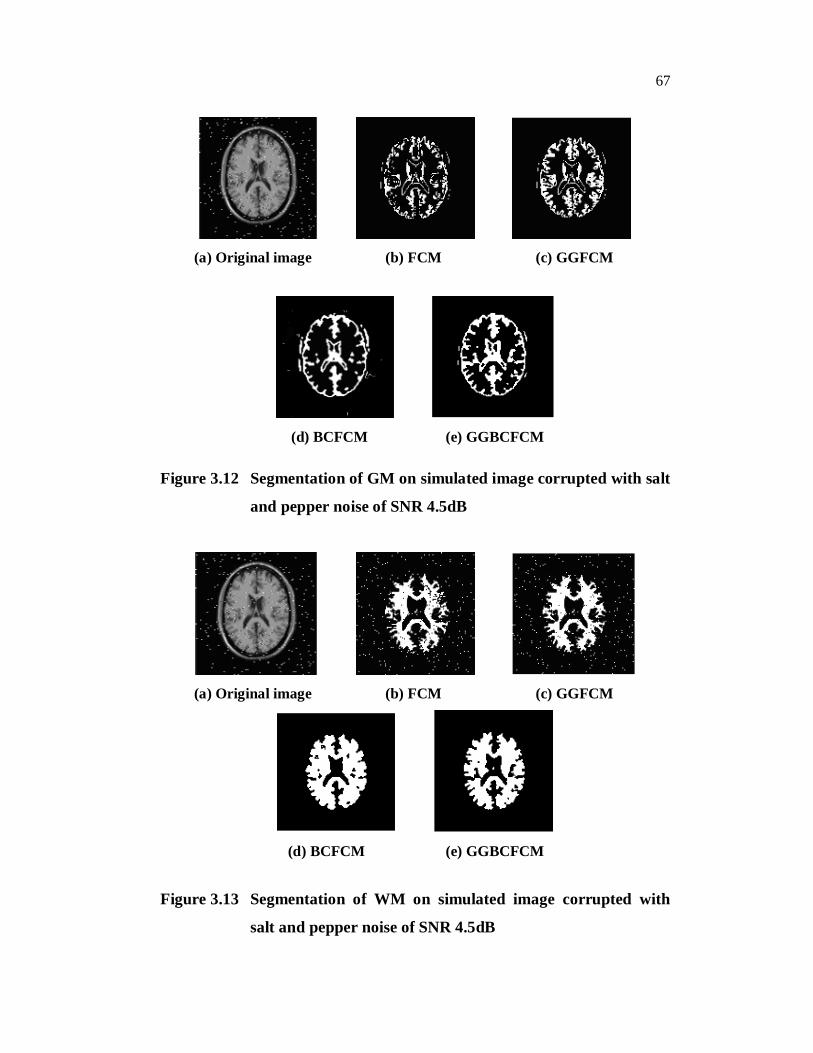
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM
Figure 3.12 Segmentation of GM on simulated image corrupted with salt
and pepper noise of SNR 4.5dB
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM
Figure 3.13 Segmentation of WM on simulated image corrupted with
salt and pepper noise of SNR 4.5dB
68
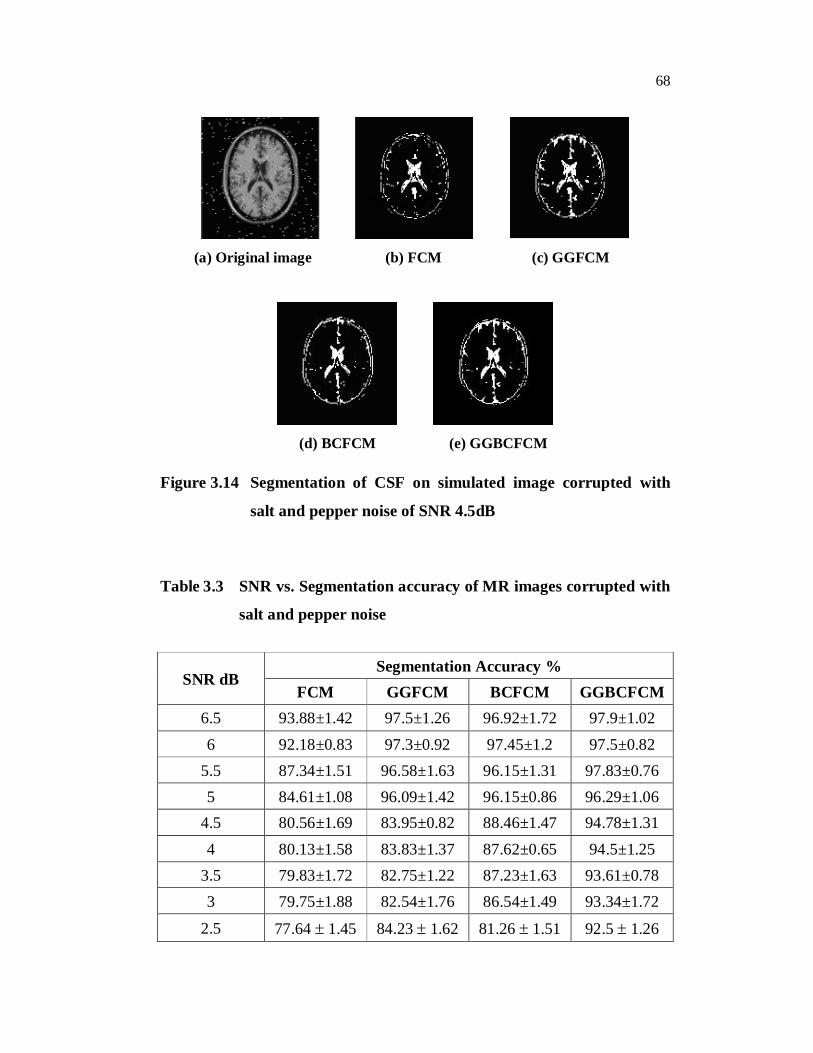
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM
Figure 3.14 Segmentation of CSF on simulated image corrupted with
salt and pepper noise of SNR 4.5dB
Table 3.3 SNR vs. Segmentation accuracy of MR images corrupted with
salt and pepper noise
SNR dB Segmentation Accuracy %
FCM GGFCM BCFCM GGBCFCM 6.5 93.88±1.42 97.5±1.26 96.92±1.72 97.9±1.02 6 92.18±0.83 97.3±0.92 97.45±1.2 97.5±0.82
5.5 87.34±1.51 96.58±1.63 96.15±1.31 97.83±0.76 5 84.61±1.08 96.09±1.42 96.15±0.86 96.29±1.06
4.5 80.56±1.69 83.95±0.82 88.46±1.47 94.78±1.31 4 80.13±1.58 83.83±1.37 87.62±0.65 94.5±1.25
3.5 79.83±1.72 82.75±1.22 87.23±1.63 93.61±0.78 3 79.75±1.88 82.54±1.76 86.54±1.49 93.34±1.72
2.5 77.64 1.45 84.23 1.62 81.26 1.51 92.5 1.26
69
50
60
70
80
90
100
6.565.554.543.532.5
Segm
enta
tion
Accu
racy
SNR dB FCM GGFCM BCFCM GGBCFCM
Figure 3.15 Comparison of segmentation algorithms on simulated MR
images corrupted with salt and pepper noise
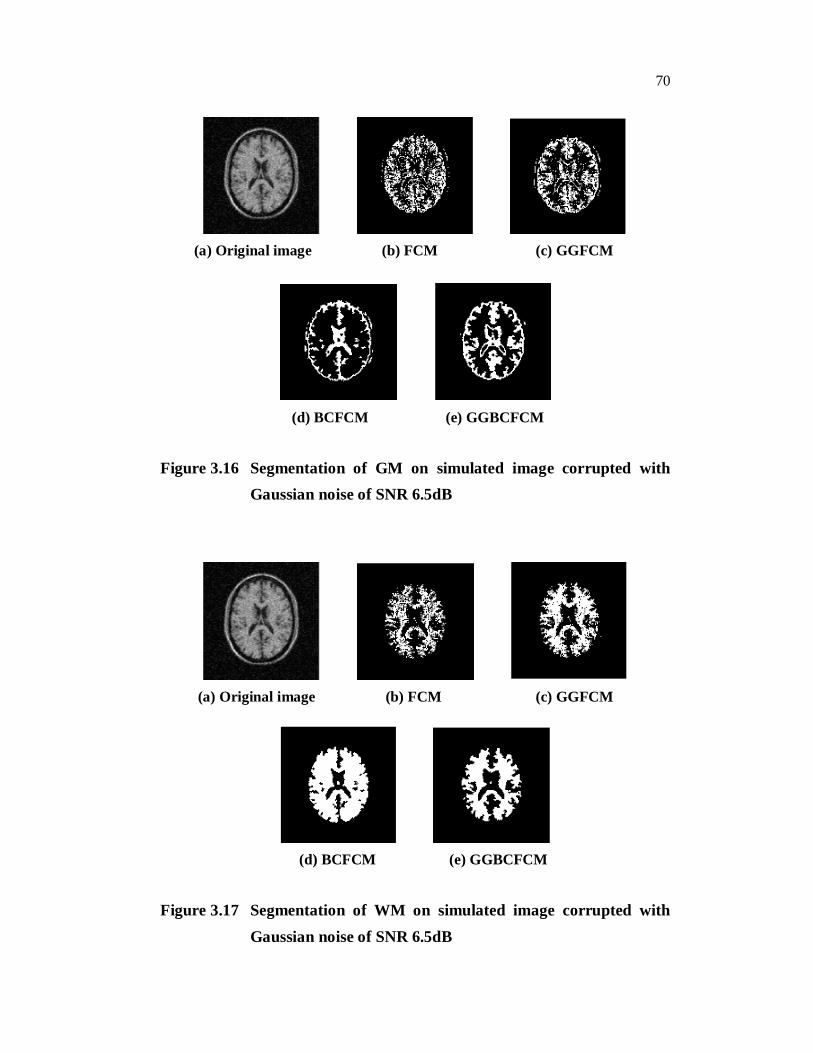
The segmentation results of FCM, GGFCM, BCFCM and
GGBCFCM when applied on T1 weighted MR image corrupted with
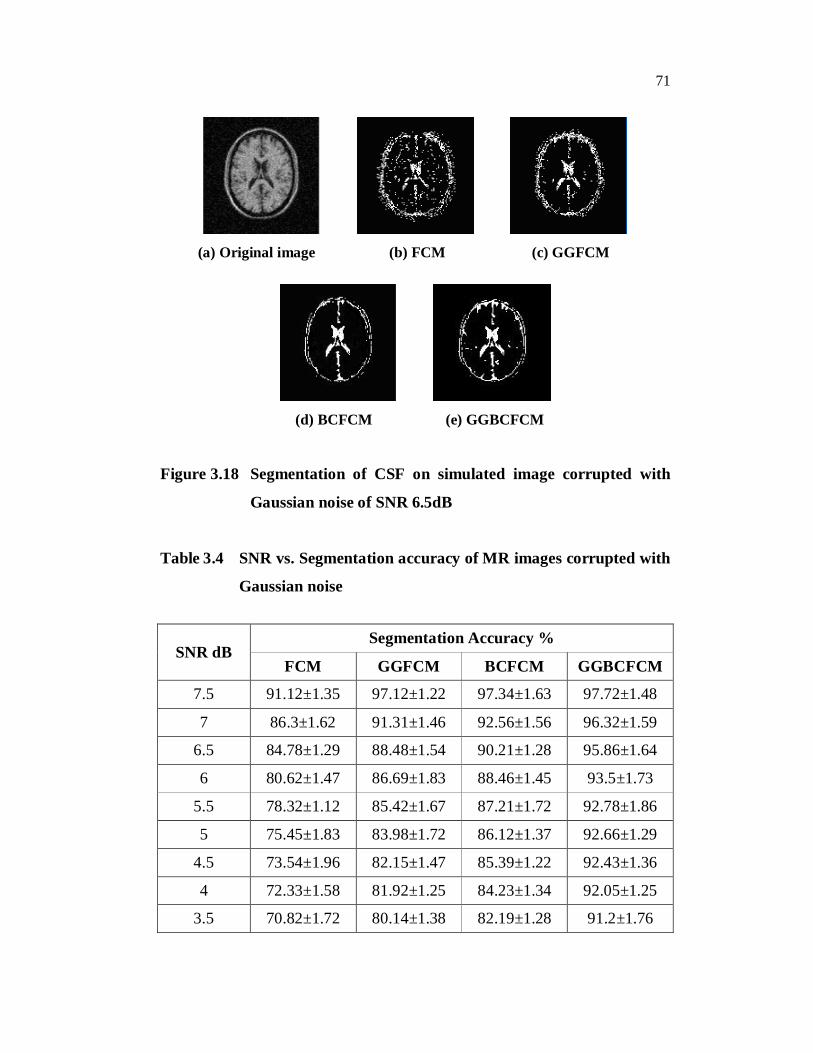
Gaussian noise are presented in Figures 3.16 to 3.18. Table 3.4 shows the
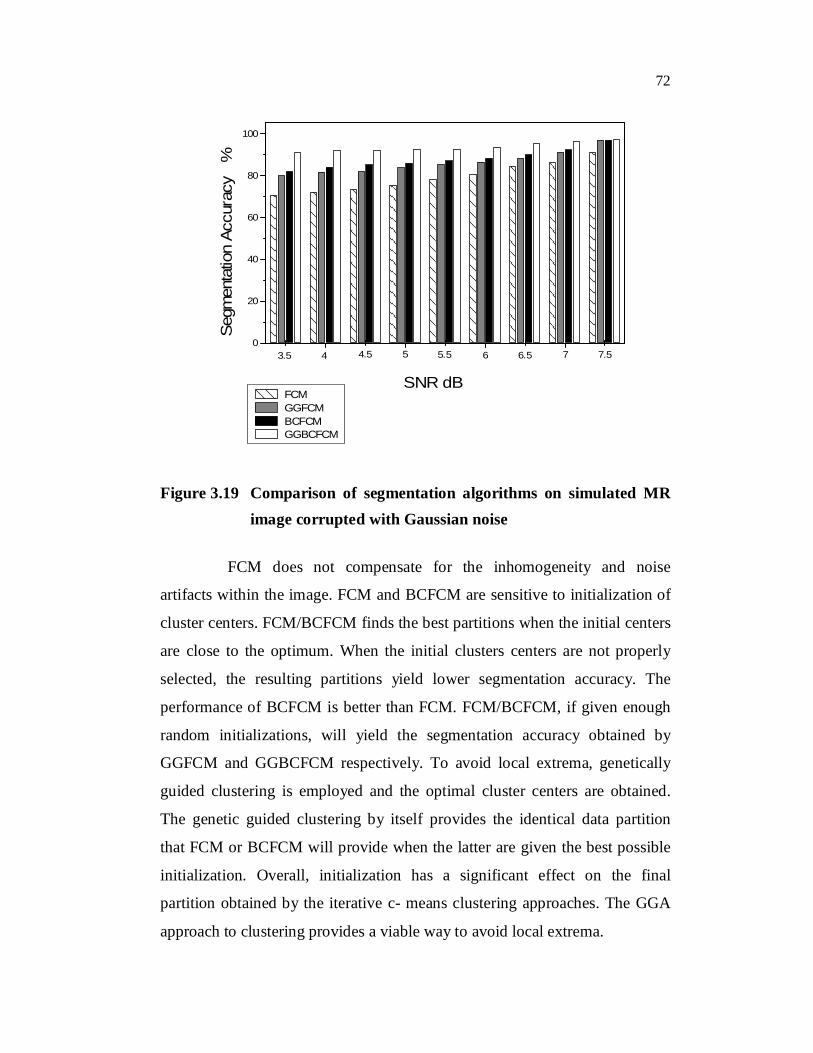
segmentation accuracy for various SNR. Figure 3.19 shows the comparison of
segmentation accuracy on simulated images corrupted with Gaussian noise.
The GGBCFCM outperformed BCFCM and GGFCM for lower SNR.
Segm
enta
tion
Accu
racy
%
70
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM Figure 3.16 Segmentation of GM on simulated image corrupted with
Gaussian noise of SNR 6.5dB
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM Figure 3.17 Segmentation of WM on simulated image corrupted with
Gaussian noise of SNR 6.5dB
71
(a) Original image (b) FCM (c) GGFCM
(d) BCFCM (e) GGBCFCM
Figure 3.18 Segmentation of CSF on simulated image corrupted with
Gaussian noise of SNR 6.5dB
Table 3.4 SNR vs. Segmentation accuracy of MR images corrupted with
Gaussian noise
SNR dB Segmentation Accuracy %
FCM GGFCM BCFCM GGBCFCM
7.5 91.12±1.35 97.12±1.22 97.34±1.63 97.72±1.48
7 86.3±1.62 91.31±1.46 92.56±1.56 96.32±1.59
6.5 84.78±1.29 88.48±1.54 90.21±1.28 95.86±1.64
6 80.62±1.47 86.69±1.83 88.46±1.45 93.5±1.73
5.5 78.32±1.12 85.42±1.67 87.21±1.72 92.78±1.86
5 75.45±1.83 83.98±1.72 86.12±1.37 92.66±1.29
4.5 73.54±1.96 82.15±1.47 85.39±1.22 92.43±1.36
4 72.33±1.58 81.92±1.25 84.23±1.34 92.05±1.25
3.5 70.82±1.72 80.14±1.38 82.19±1.28 91.2±1.76
72
0
20
40
60
80
100
7.576.565.554.543.5
Segm
enta
tion
Accu
racy
%
SNR dB FCM GGFCM BCFCM GGBCFCM
Figure 3.19 Comparison of segmentation algorithms on simulated MR image corrupted with Gaussian noise
FCM does not compensate for the inhomogeneity and noise
artifacts within the image. FCM and BCFCM are sensitive to initialization of
cluster centers. FCM/BCFCM finds the best partitions when the initial centers
are close to the optimum. When the initial clusters centers are not properly
selected, the resulting partitions yield lower segmentation accuracy. The
performance of BCFCM is better than FCM. FCM/BCFCM, if given enough
random initializations, will yield the segmentation accuracy obtained by
GGFCM and GGBCFCM respectively. To avoid local extrema, genetically
guided clustering is employed and the optimal cluster centers are obtained.
The genetic guided clustering by itself provides the identical data partition
that FCM or BCFCM will provide when the latter are given the best possible
initialization. Overall, initialization has a significant effect on the final
partition obtained by the iterative c- means clustering approaches. The GGA
approach to clustering provides a viable way to avoid local extrema.
73
In this work, genetically guided bias corrected fuzzy c-means
algorithm is proposed for segmentation of MR images. This method
simultaneously estimates the bias field while segmenting the image. The
segmentation algorithms are run for various levels of intensity inhomogeneity
and Gaussian noise. The performance of FCM, GGFCM, BCFCM and
GGBCFCM is compared. For various noise levels, GGBCFCM segments the
brain tissues with higher degree of accuracy and estimates the bias field
accurately. The results using simulated MR and real brain images show that
intensity variations across patients, scans and equipment changes have been
accommodated in the estimated bias field without the need for manual
intervention.