chapter 3 artificial neural networks and...
TRANSCRIPT

46
CHAPTER 3
ARTIFICIAL NEURAL NETWORKS AND
LEARNING ALGORITHM
3.1 ARTIFICIAL NEURAL NETWORKS
3.1.1 Introduction
The notion of computing takes many forms. Historically, the term
‘computing’ has been dominated by the concept of ‘programmed computing’
than neural computing. In programmed computing, algorithms are designed
and subsequently implemented using the currently dominant architecture,
whereas in neural computing, learning replaces a priori program development.
The neural computing offers a potential solution to many currently unsolved
problems in conventional computing. Artificial neural networks provide new
tools and new foundations for solving practical problems in prediction,
decision and control, signal separation, state estimation, pattern recognition,
data mining, etc. Traditional statistics tries to collect a huge library of
different methods for different tasks, but the brain is a living proof that one
system can do it all, if there is data. It proves that a system can manage
millions of variables without being confused. Nowadays, engineers and
scientists are trying to develop intelligent machines. Artificial Neural Systems
(ANS) are examples of such machines that have greater potential to further
improve the quality of human life.
Artificial neural networks are collections of mathematical models that
emulate some of the observed properties of biological nervous systems and
47
draw on the analogies of adaptive biological learning. They are capable of
developing their behavior through learning. They learn through experiences
like human brain. They are dynamical systems in the learning/training phase
of their operation and convergence is an essential feature. There are different
types of ANNs. Some of the popular models include the BPN which is
generally trained with the Generalized Delta Rule (GDR), Learning Vector
Quantization (LVQ), Radial Basis Function (RBF), Hopfield, Adaptive
Resonance Theory (ART) and Kohonen’s Self-Organizing Feature Map
(SOM) networks. Some ANNs are classified as feedforward while others are
recurrent (i.e., implement feedback) depending on how data is processed
through the network.
The synaptic weight update of ANNs can be carried out by
supervised methods, or by unsupervised methods, or by fixed weight
association network methods. In the case of the supervised methods, inputs
and outputs are used, whereas, in the unsupervised methods, only the inputs
are used. In the fixed weight association network methods, inputs and outputs
are used along with pre-computed and pre-stored weights. Artificial Neural
Networks are used where
• a conventional process is not suitable.
• the conventional method cannot be easily delivered.
• the conventional method cannot fully capture the complexity
in the data and the stochastic behavior is important.
• an explanation of the network’s decision is not required.
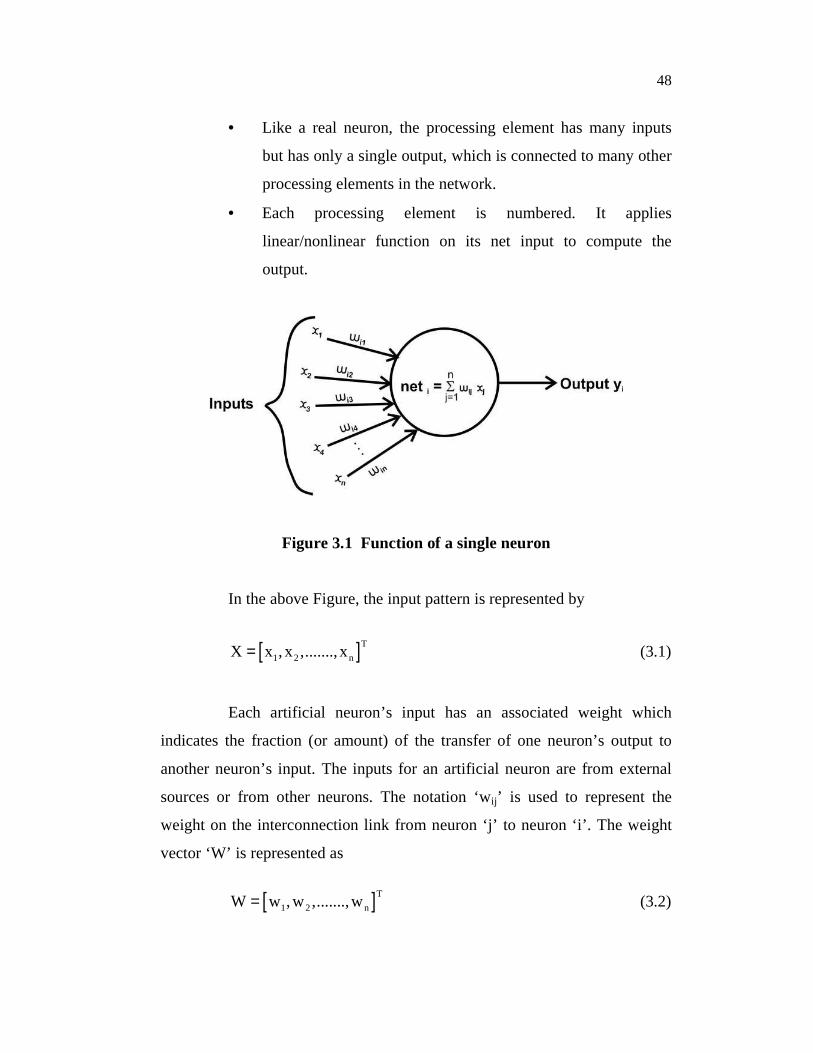
The function of a single neuron in an ANN is shown in Figure 3.1.
• Each neuron receives inputs from other neurons and/or from
external sources.
48
• Like a real neuron, the processing element has many inputs
but has only a single output, which is connected to many other
processing elements in the network.
• Each processing element is numbered. It applies
linear/nonlinear function on its net input to compute the
output.
Figure 3.1 Function of a single neuron
In the above Figure, the input pattern is represented by
[ ]T
1 2 nX x ,x ,......., x= (3.1)
Each artificial neuron’s input has an associated weight which
indicates the fraction (or amount) of the transfer of one neuron’s output to
another neuron’s input. The inputs for an artificial neuron are from external
sources or from other neurons. The notation ‘wij ’ is used to represent the
weight on the interconnection link from neuron ‘j’ to neuron ‘i’. The weight
vector ‘W’ is represented as
[ ]T
1 2 nW w ,w ,.......,w= (3.2)

49
The net input value of a single neuron is determined by the
weighted sum of inputs as given by
i i1 1 i2 2 in nnet(i) net w x w x ............ w x= = + + + (3.3)
= n
ik kk 1
w x=∑ (3.4)
where ‘n’ is the number of inputs. A neuron (or unit) fires, if the sum of its
inputs exceeds some threshold value. If it fires, it produces an output, which
has been sent to the next layer neurons.
In vector notation, the net input value is given by
Tinet W X= (3.5)
The output value of a single neuron is obtained as
io(i) f (net )= (3.6)
The objective of neural network design is to determine an optimal
set of weights w*. Therefore, the artificial neurons involve two important
processes.
(i) Determine the net input value by combining the inputs.
(ii) Mapping the net input value into the neuron’s output. This
mapping may be as simple as using the identity function or as
complex as using a nonlinear function.
3.1.2 Backpropagation Neural Network
The area of speech signal separation and recovery of original signals
from a mixed signal is a challenging domain for information and system
processing. Continued attempt of using artificial neural network in speech

50
signal separation is taking place (Cichocki and Unbehauen 1996; Amari and
Cichocki 1998; Meyer et al 2006). They have ensured the separation of
extremely weak or badly scaled stationary signals, as well as a successful
separation even if the mixing matrix is very ill-conditioned.
The Backpropagation (BPN) neural network is a multilayer
supervised neural network which uses steepest descent method to update
weights. Its architecture as given in Figure 3.2 has an input layer with ‘I’
nodes and an output layer with ‘K’ nodes and one hidden layer with ‘J’ nodes.
Each neuron in the hidden layer has its own input weights and the output of a
neuron in a layer goes to all neurons in the next layer.
Figure 3.2 Architecture of backpropagation neural network
The initial weight values are randomly generated by the Matlab function
rand(). The input layer does not process the mixture input. It just distributes
the input samples to all the neurons in the hidden layer. The output of each
hidden layer neuron is obtained by applying the sigmoid function to its net
51
input value. Each hidden neuron output is fed to all the neurons in the output
layer. Each neuron in the output layer, first calculates the net input value and
then it applies nonlinear function on the net input to produce an output value
‘m’.
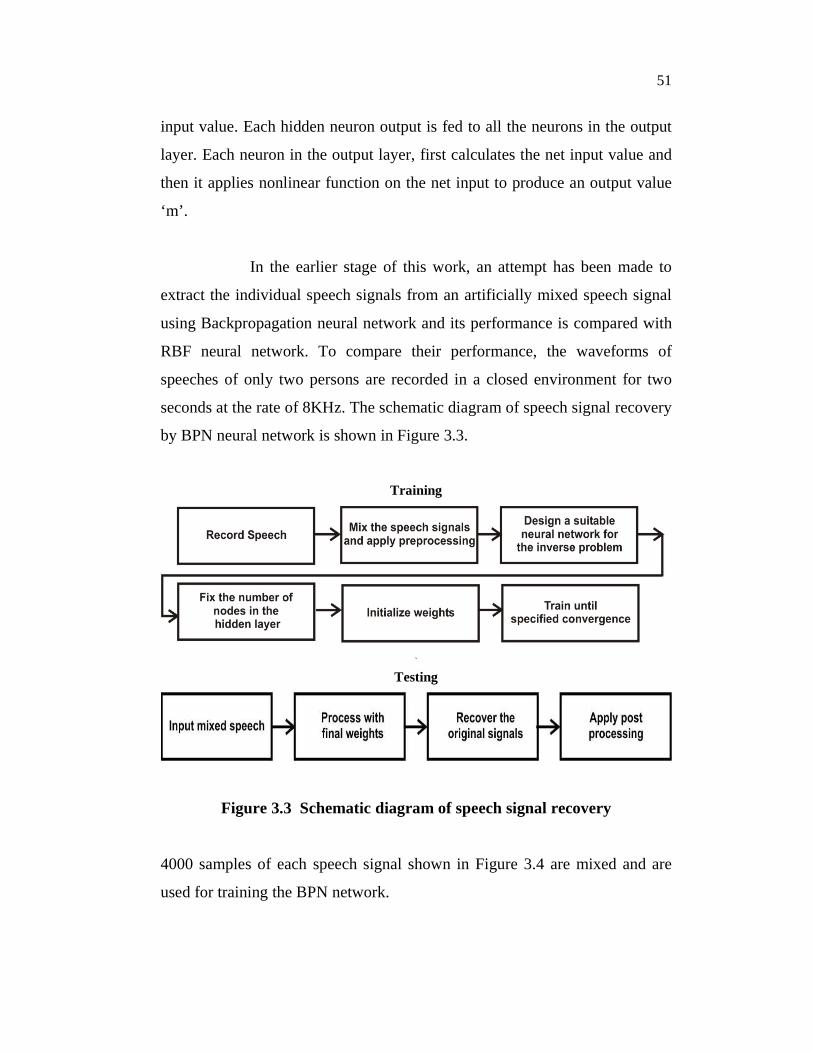
In the earlier stage of this work, an attempt has been made to
extract the individual speech signals from an artificially mixed speech signal
using Backpropagation neural network and its performance is compared with
RBF neural network. To compare their performance, the waveforms of
speeches of only two persons are recorded in a closed environment for two
seconds at the rate of 8KHz. The schematic diagram of speech signal recovery
by BPN neural network is shown in Figure 3.3.
Training
`
Testing
Figure 3.3 Schematic diagram of speech signal recovery
4000 samples of each speech signal shown in Figure 3.4 are mixed and are
used for training the BPN network.

52
(a) Speech signals of two persons
(b) Mixed speech signal
Figure 3.4 Two speech signals and mixed signal
(a) Recovery of speech 1 (b) Recovery of speech 2
Figure 3.5 Recovery of speech signals by BPN neural network
(a) Recovery of speech 1 (b) Recovery of speech 2
Figure 3.6 Recovery of speech signals by RBF neural network
53
From the simulation result shown in Figure 3.5, it has been observed that the
recovered signals by BPN are distorted with poor quality of speech for limited
number of iterations (at which RBF neural network is converged). The BPN
network which has 15 hidden neurons, takes 65 minutes to reduce the error to
0.01. The computational load is more since the weights between input and
hidden layer and weights between hidden and output layer are updated.
The major limitation of the backpropagation neural network is
its slow convergence time (i.e. more training time) and it has ended up with
local minima. Moreover, there is no proof of convergence, although it seems
to perform well in practice. Due to stochastic gradient descent on a nonlinear
error surface, it is likely that most of the time the result may converge to some
local minimum on the error surface. Another major limitation is the problem
of scaling and when the complexity of the problem is increased, there is no
guarantee that good generalization would result. So, the network size, such as
the number of hidden layers has to be increased. This results in heavy burden
on the computation and network complexity. So the RBF neural network is
trained with the same data and from Figure 3.6, it is observed that
recovered signals by RBF network are obtained without distortion. The RBF
network which has two hidden neurons, takes 52 sec to reduce the error to
0.01. The computational load is less since only the weights between hidden
and output layer are updated.
3.1.3 Training Strategy of Backpropagation Neural Network
For the network to learn patterns, the weight updating algorithm,
Unsupervised Stochastic Gradient Descent Algorithm (USGDA) has been
used. The present work involves modification of weights to extract the

54
independent signals from mixed signals. The function of the network is based
on an unsupervised learning strategy.
The inputs of a pattern are presented and the output of the network
in the output layer is computed and the weights in the output layer and hidden
layer are updated by the weight update equation and compared with the
previous weight value. The total error i.e., the difference between the previous
weight value and the current weight value is determined. The total error for all
patterns presented is calculated and if this total error is greater than zero, the
learning rate parameter is varied by the Equation (4.1) and the weights are
updated by the weight update Equations (3.7) and (3.8). At each iteration, this
process decreases the total error of the network for all the patterns presented.
To minimize the total error to zero, the network is presented with all the
training patterns many times. This procedure is repeated until the error
becomes 0.01.
As given in Figure 3.2, ‘R’ is the weight matrix between input and
hidden layer. ‘Z’ is the weight matrix between the hidden and output layer.
The weight value zkj on the interconnection from neuron ‘j’ to neuron ‘k’ is
updated by the weight update equation
( ) ( ) ( ) ( )( ) Tkj kj 1 2 pz t 1 z t lrp d t d t O+ = + × − × + ε (3.7)
where ‘t’ - time step,
lrp - learning rate parameter, = 0.99,
ε - constant parameter, = 0.05
d1(t) = inv(det(Z(t))
( ) 3 5 7 9 11
2 k k k k k
13 15k k
d t [3m 4m 2.92m 5m 3.417m
0.78m 0.056m ]
= − + − +
− +

55
TpO - Transpose of mixture signal ‘p’
Similarly, all the remaining weights between hidden and output
layer are updated by the Equation (3.7). The weight value rji on the
interconnection from neuron ‘i’ to neuron ‘j’ is updated by the weight update
equation
( ) ( ) ( ) ( )( )( ) ( ) ( ) 1Tji ji 1 2 p kj pjr t 1 z t lrp d t d t O z t 1 exp( net
−+ = + × − × + ε × × + −
(3.8)
Similarly, all the remaining weights between input and hidden layer are
updated by the Equation (3.8).
To implement this algorithm, the speeches of two persons are
recorded in a closed environment for two seconds at the rate of 4 KHz. Like
this, 25 speeches of males and 25 speeches of females are recorded and stored
as .wav files. Fifty combinations (one male and one female; two males; two
females) of different speech waveforms (S1 and S2) are mixed artificially by
multiplying the speech signals with various coefficients as given by
O1 = 0.3×S1+0.7×S2 (3.9)
500 samples of each mixture signal are preprocessed by the
technique, normalization so that the inputs to the nodes of the input layer are
between zero and one. 40 mixture signals are used for training both BPN and
RBF neural networks by the unsupervised stochastic gradient descent
algorithm and 10 mixture signals are used for testing the networks. From
Figure 3.7, it is found that after certain number of iterations (no. of
iterations=2223, at which the RBF network is converged), the BPN network is
able to converge to only some extent. The network is found to convergence
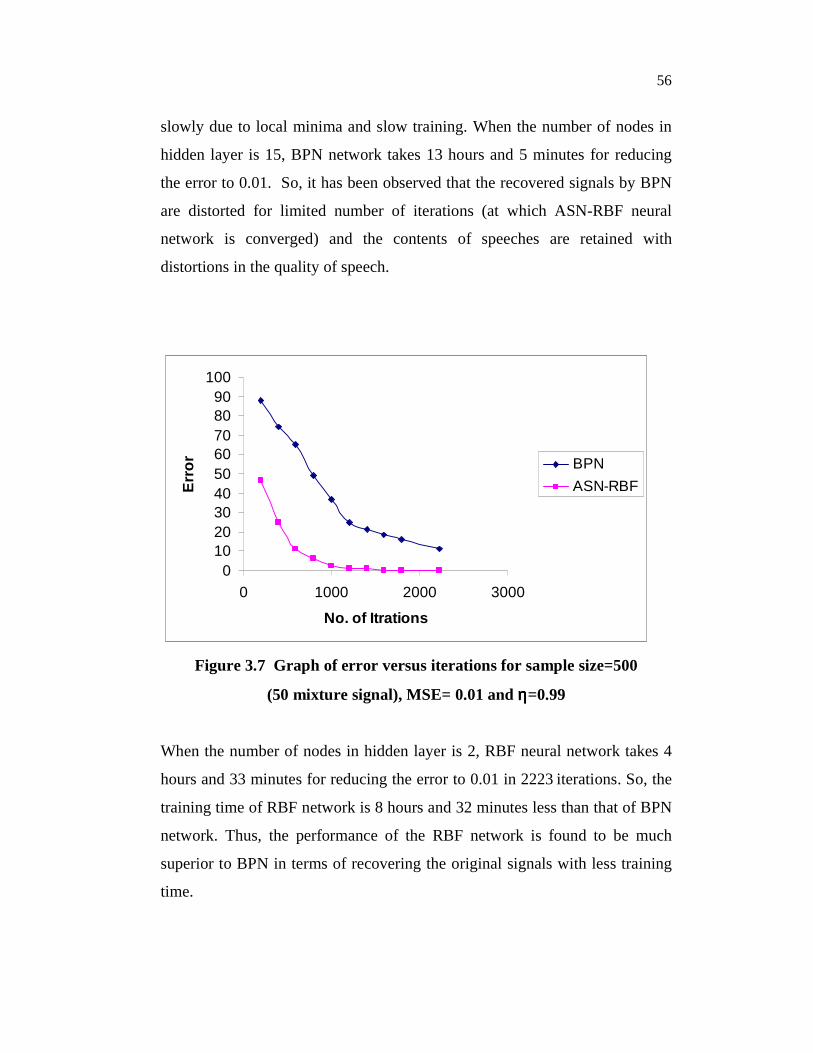
56
slowly due to local minima and slow training. When the number of nodes in
hidden layer is 15, BPN network takes 13 hours and 5 minutes for reducing
the error to 0.01. So, it has been observed that the recovered signals by BPN
are distorted for limited number of iterations (at which ASN-RBF neural
network is converged) and the contents of speeches are retained with
distortions in the quality of speech.
0102030405060708090
100
0 1000 2000 3000
No. of Itrations
Err
or BPN
ASN-RBF
Figure 3.7 Graph of error versus iterations for sample size=500
(50 mixture signal), MSE= 0.01 and ηηηη=0.99
When the number of nodes in hidden layer is 2, RBF neural network takes 4
hours and 33 minutes for reducing the error to 0.01 in 2223 iterations. So, the
training time of RBF network is 8 hours and 32 minutes less than that of BPN
network. Thus, the performance of the RBF network is found to be much
superior to BPN in terms of recovering the original signals with less training
time.
57
3.1.4 Adaptive Self-Normalized Radial Basis Function (ASN-RBF)
Neural Network
In recent years, there has been an increasing interest in using Radial
Basis Function neural network for many problems. Like Backpropagation and
Counter propagation neural networks, it is a feedforward neural network that
is capable of performing nonlinear relationship between the input and output
vector spaces. RBF and BPN are both universal approximators. i.e., when
they are designed with enough hidden layer neurons, they approximate any
continuous function with arbitrary accuracy (Girosi and Poggio 1989;
Hartman et al 1990). This is a property they share with other feedforward
networks having one hidden layer of nonlinear neurons. Hornik et al (1989)
have shown that the nonlinearity need not be sigmoid and it can be any of a
wide range of functions. It is therefore not surprising to find that there always
exists an RBF network capable of accurately mimicking a specified BPN or
vice-versa.
The RBF network is found to be suitable for BSS problem since it has
the following characteristics.
1. It has faster learning capability and it is good at handling
nonlinear data.
2. It finds input to output mapping using local approximators and
they require fewer training samples.
3. It provides smaller interpolation errors, higher reliability and a
more well-developed theoretical analysis than BPN

58
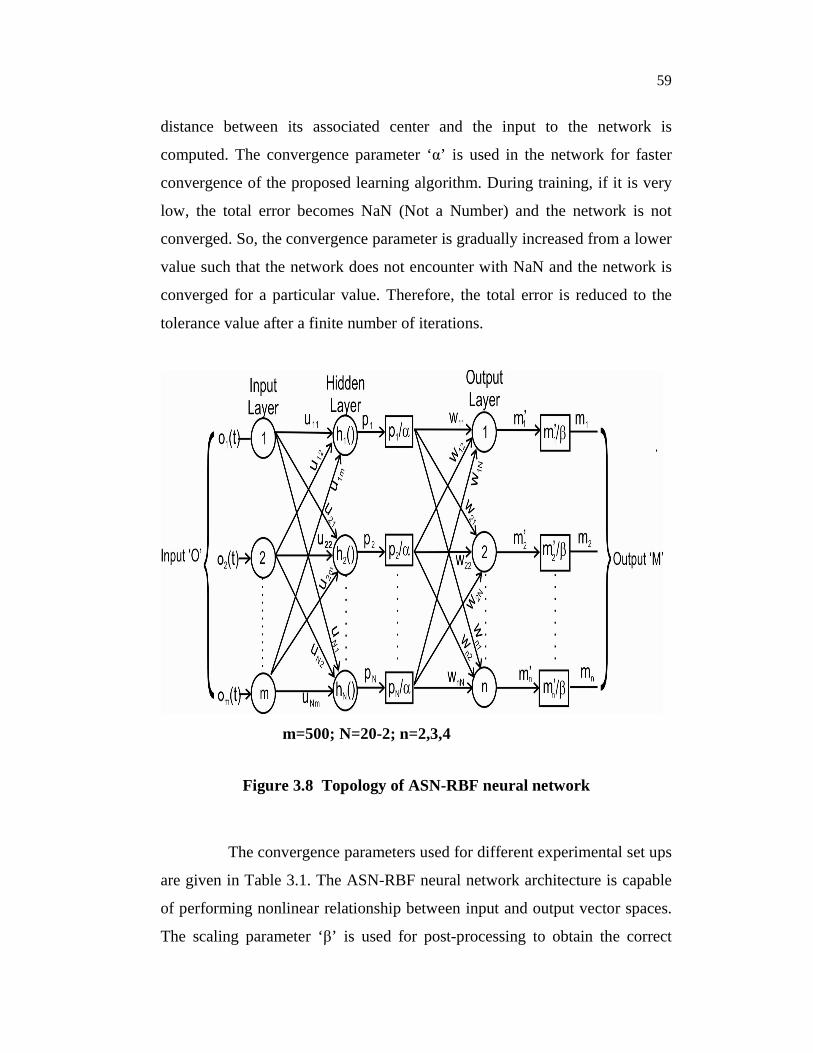
As shown in Figure 3.8, the ASN-RBF neural network consists of three
layers: an input layer with 500 neurons, a single layer of nonlinear processing
neurons and an output layer with 2, 3 or 4 neurons depending on the number
of sources. In Backpropagation neural network, the weights between hidden
layer and output layer and also the weights between hidden and input layer
are updated during training. But, in RBF neural network, only the weights
between hidden and output layer are updated. The RBF network does not end
up with local minima and the outputs of the hidden layer neurons are
calculated by
( ) ( ) ( )k
m mp f o u o,c u o ci i ik k k ik k
k 1 k 1= = ϕ = ϕ −∑ ∑
= =
for i 1,2,...., N= (3.10)
and the outputs of output layer neurons are calculated by
N
ji ii 1
j
w .pm =
= β
∑ where
1β =α
(3.11)
where ip is the output of the hidden neuron ‘i’, ‘α’ is the convergence
parameter used in the network, n 1o R +∈ is an input vector and ( )k .ϕ is a radial
basis function which is given by ( )2 2iexp( D ) 2− λ , where
( ) ( )T2i ji jiD O W O W= − − and ‘λ’ is the spread factor which controls the
width of the radial basis function, ikU is the weight matrix between input and
hidden layer, jiW is the weight matrix between hidden and output layer, ‘N’ is
the number of neurons in the hidden layer and N 1kc R ×∈ are the RBF centers
in the input vector space. For each neuron in the hidden layer, the Euclidean
59
distance between its associated center and the input to the network is
computed. The convergence parameter ‘α’ is used in the network for faster
convergence of the proposed learning algorithm. During training, if it is very
low, the total error becomes NaN (Not a Number) and the network is not
converged. So, the convergence parameter is gradually increased from a lower
value such that the network does not encounter with NaN and the network is
converged for a particular value. Therefore, the total error is reduced to the
tolerance value after a finite number of iterations.
m=500; N=20-2; n=2,3,4
Figure 3.8 Topology of ASN-RBF neural network
The convergence parameters used for different experimental set ups
are given in Table 3.1. The ASN-RBF neural network architecture is capable
of performing nonlinear relationship between input and output vector spaces.
The scaling parameter ‘β’ is used for post-processing to obtain the correct
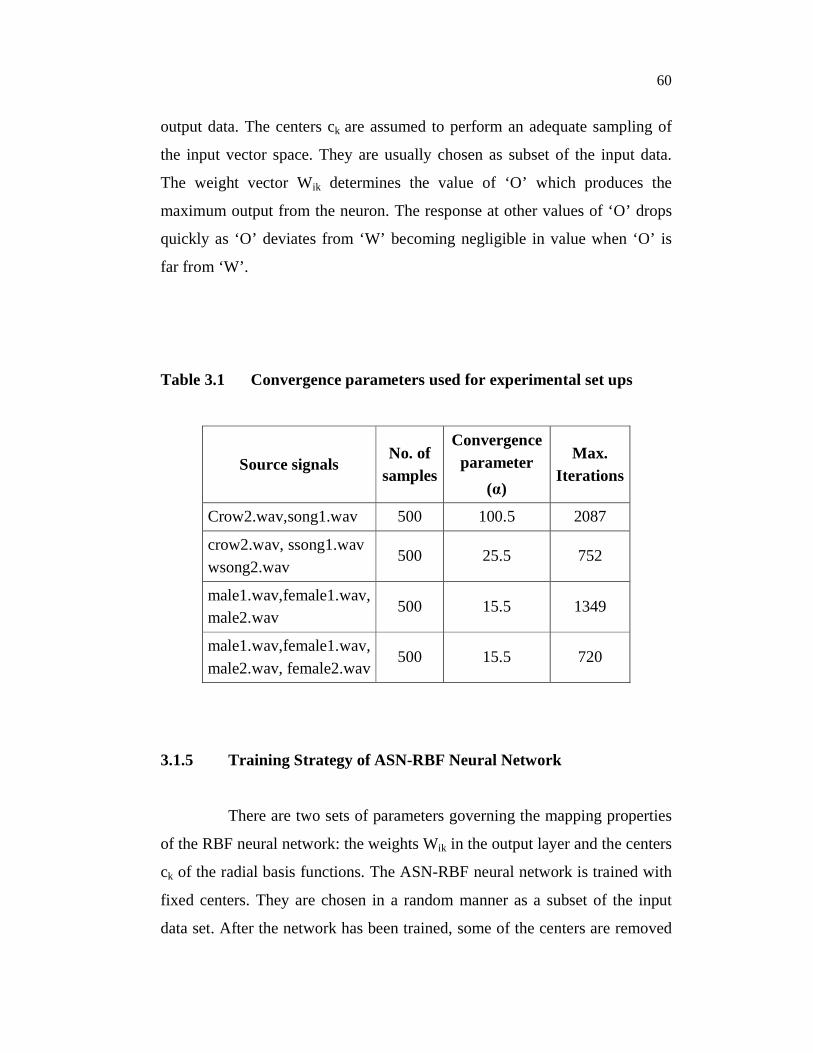
60
output data. The centers ck are assumed to perform an adequate sampling of
the input vector space. They are usually chosen as subset of the input data.
The weight vector Wik determines the value of ‘O’ which produces the
maximum output from the neuron. The response at other values of ‘O’ drops
quickly as ‘O’ deviates from ‘W’ becoming negligible in value when ‘O’ is
far from ‘W’.
Table 3.1 Convergence parameters used for experimental set ups
Source signals No. of
samples
Convergence parameter
(α)
Max. Iterations
Crow2.wav,song1.wav 500 100.5 2087
crow2.wav, ssong1.wav wsong2.wav
500 25.5 752
male1.wav,female1.wav, male2.wav
500 15.5 1349
male1.wav,female1.wav, male2.wav, female2.wav
500 15.5 720
3.1.5 Training Strategy of ASN-RBF Neural Network
There are two sets of parameters governing the mapping properties
of the RBF neural network: the weights Wik in the output layer and the centers
ck of the radial basis functions. The ASN-RBF neural network is trained with
fixed centers. They are chosen in a random manner as a subset of the input
data set. After the network has been trained, some of the centers are removed
61
in a systematic manner without significant degradation of the system
performance. The location of the centers of the receptive fields is a critical
issue and there are many alternatives for their determination. In the learning
algorithm, the center and corresponding hidden layer neuron are located at
each input vector in the training set. The diameter of the receptive region,
determined by the value of the spread factor ‘λ’ is set at 0.01, has a profound
effect upon the accuracy of the system. The objective is to cover the input
space with receptive fields as uniformly as possible. If the spacing between
centers is not uniform, it is necessary for each hidden neuron to have its own
value of ‘λ’.
100 inputs (birds voices) are used for this proposed network. Out of
these, 80 inputs are used for training the ASN-RBF neural network and 20
inputs are used for testing the network. Each input corresponds to different
combinations of birds voices downloaded from the website
http://www.nhl.nl/~ribot/english/sounds1.html. Different combinations of the
birds voices are artificially mixed and preprocessed by the technique,
Normalization so that the inputs to the nodes of input layer are between zero
and one. The preprocessed input is fed to the network in the form of 500
samples, corresponding to 500 neurons in the input layer. The number of
source signals is varied from two to four. The ASN-RBF neural network is
also trained and tested for separation of speech signals which are recorded for
about 2 sec in a closed environment at the rate of 8 KHz. The proposed ASN-
RBF neural network and learning algorithm perform well under non-
stationary environments and when the number of source signals is unknown
and dynamically changed.

62
3.2 UNSUPERVISED STOCHASTIC GRADIENT DESCENT
LEARNING ALGORITHM
To separate independent components from the observed signal, an
objective function is required. The objective function is chosen such that it
gives original signals when it is minimized. During training of the ASN-RBF
neural network, one of the free parameters i.e., the interconnection weights
between hidden layer and output layer are adjusted to minimize the objective
function. In signal processing (Taleb and Jutten 1998), when the components
of the output vector become independent, its joint probability density function
factorizes to marginal pdfs, given by
( ) ( )i
k
M M ii 1
f M,W f m ,W=
= ∏ (3.12)
where )W,m(f iM i is the marginal pdf of Mi , mi is the ith component of the
output signal ‘M’ and ‘k’ is the number of source signals. The Equation (3.12)
is a constraint imposed on the learning algorithm. The joint pdf of ‘M’
parameterized by ‘W’ is written as
( )( )
M
f Oof M,W
B= (3.13)
where B is the determinant of the Jacobian matrix ‘B’. It is defined as
1 1 1
1 2 k
2 2 2
1 2 k
k k k
1 2 k
m m m...
o o o
m m m...
o o oB
... ... ... ...
m m m...
o o o
∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂=
∂ ∂ ∂∂ ∂ ∂
(3.14)

63
Referring to Equation (1.4), each element in Equation (3.14) is
represented interms of ‘w’ as
iij
j
mw
o
∂ =∂
(3.15)
Therefore, Equation (3.14) is written as
11 12 1k
21 22 2k
k1 k2 kk
w w ... w
w w ... wW
... ... ... ...
w w ... w
= (3.16)
Now, Equation (3.13) is written as
( )( )
M
f Oof M,WW
= (3.17)
To extract independent components from the observed signal, the
difference between the joint pdf and the product of marginal pdfs is
determined. When the components become independent, the difference
becomes zero (i.e. the joint pdf becomes equal to the product of marginal pdfs
of the separated signals). It is expressed as
( ) ( )i
k
M M ii 1
f M,W f m ,W 0=
− =∏ (3.18)
Since the logarithm provides computational simplicity, it is taken
on both sides of Equation (3.18) and it becomes,
( ) ( )( )i
k
M M ii 1
log(f M,W) log f m ,W=
=∑ (3.19)

64
Substituting the value of ( )Mf m,W from Equation (3.17) in
Equation (3.19),
( ) ( )( )
i
ko
M ii 1
f Olog log f m ,W
W =
=
∑ (3.20)
Because the pdf of the input vector is independent of the parameter
vector ‘W’, the objective function for optimization becomes
( ) ( )i
k
M ii 1
(W) log W log f (m ,W)=
Φ = − −∑ (3.21)
Now, the Edgeworth series has been used to expand the second
term in Equation (3.21). The edgeworth series expansion of the random
variable ‘M’ about the Gaussian approximate α(m) is given by
( )( ) ( ) ( ) ( )
2M i 3 34
3 4 6
f m k 10kk1 H m H m H m .........
m 3 4 6= + + + +
α ! ! ! (3.22)
where α(m) denotes the probability density function of a random variable ‘M’,
normalized to zero mean and unit variance, ki denotes the cumulant of order
‘i’ of the standardized scalar random variable ‘M’ and Hi denotes the Hermite
polynomial of order ‘i’. The third and fourth order cumulants and Hermite
polynomials are given by
k3=c3 (3.23)
H3(m) = m3-3m (3.24)
H4(m)=m4-6m2+3 (3.25)
k4=c4-3c22 (3.26)

65
The cumulants are expressed interms of moments. The rth order
moment of ‘m’ is given by
ri,r ic E m = (3.27)
rn
ir ir 1
E w .O=
= ∑ (3.28)
Substituting the values of the cumulants and Hermite polynomials
from Equations (3.23), (3.24), (3.25) and (3.26) in Equation (3.22) and taking
logarithm on both sides, it becomes
( )( )
4 6 8 10 12M i
14 16
f mlog 0.75m 0.67m 0.365m 0.5m 0.285m
m
0.06m 0.0035m
= − + − + −α
+ +
(3.29)
Differentiating Equation (3.29) with respect to wik,
( )( )
M i
3 5 7 9 11 13 15i i i i i i i k
ik
f mlog
m3m 4m 2.92m 5m 3.417m 0.78m 0.056m O
w
∂α
= − + − + − + − ∂ (3.30)
Therefore, the optimization function becomes
( ) 3 5 7 9 11 13 15i i i i i i i im (t) 3m 4m 2.92m 5m 3.417m 0.78m 0.056m Ψ = − + − + − +
(3.31)
After simplification, the gradient descent of Equation (3.21) now becomes
( ) ( )W T TW m OW
∂Φ − − = − Ψ ∂
(3.32)
The stochastic gradient descent algorithm for weight update is
written as
66
( ) ( )WW t 1 W(t)
W
∂Φ+ = − η
∂ (3.33)
Substituting the gradient of the cost function from Equation (3.32)
in Equation (3.33), the weight update rule is written as
( ) ( ) ( ) ( )( ) ( )T TW t 1 W t t W m t O t− + = + η − Ψ (3.34)
The Edgeworth series is used for the approximation of probability
density functions since its coefficients decrease uniformly and the error is
controlled, so that it is a true asymptotic expansion. On the other hand, the
terms in the Gram-Charlier expansion do not tend uniformly to zero from the
view point of numerical errors; i.e., in general, no term is negligible compared
to a preceding term.
3.2.1 Algorithm Description
Once the centers and spread factors have been chosen, the output
layer weight matrix ‘W’ is optimized by unsupervised learning using
stochastic gradient descent technique. The training process consists of the
following sequences as given in Figure 3.9.
Step 1 : Initialize the parameters.
a) Assign weights between input and hidden layer.
b) Assign weights between hidden and output layer.
c) Set η=0.99, λ=0.09, 0.05ε = and set M(t)=O(t).
Step 2 : Read input signals.
Step 3 : Generate mixing matrix A.
Step 4 : Obtain the observed mixture signal ‘O’.
Step 5: Preprocess (i.e., normalize) the mixture signals.
67
Step 6 : Recover source signals.
(i) Apply the observed signal to the input layer neurons.
% Forward operation
% For each pattern in the training set
a) Find the Hidden layer output.
b) Find inputs to nodes in the output layer.
c) Compute the actual output of output layer
neurons.
d) Determine delta ∆W.
e) Update the weights between hidden and output
layer.
f) If the difference between previous weight value
and current weight value is not equal to zero,
then
go to step 5
else
stop training
Step 7: Postprocess (i.e., Denormalization) the output data.
Step 8: Store and display the separated signals.
Thus, the development of this algorithm involves
maximization of the statistical independence between the output vectors
‘M’. It is equivalent to minimizing the divergence between the two
distributions:
(i) Joint probability density function fM(m,W) parameterized
by W.

68
(ii) Product of marginal density function of Mi,
( )n
M iii 1
f m ,W=
∏ .
Figure 3.9 Block diagram of source signal recovery
3.2.2 Implementation of USGDA
Step 1: Get Source 1.
[s1,srate,no_bits]=wavread('nukeanthem');
% Returns the sample rate in Hertz and the
number of bits per sample (NBITS) used to
encode the data in the file.
s1=wavread('nukeanthem.wav',num_samples);
69
sources(1,:)=s1;
Step 2: Get Source 2.
s2=wavread('dspafxf.wav',num_samples);
% Returns only the first N samples from each
channel in the file.
sources(2,:)=s2;
Step 3: Get Source 3.
s3=wavread('UTOPIA.wav',num_samples);
sources(3,:)=s3;
Step 4 : Initialize the parameters.
a) Assign weights between input and hidden layer.
b) Assign weights between hidden and output layer.
c) Set η=0.99, λ=0.09, 0.05ε = and set M(t)=O(t).
Step 5: Generate mixing matrix A.
A=rand(num_mixtures,num_sources);
Step 6: Obtain the observed mixture signal ‘O’ by
O = sources * A;
Step 7: Preprocess the mixture signal.
Step 8: Recover source signals.
%Forward operation
% For each pattern in the training set
(i) Find h (Hidden layer output).
for j =1:p
dis=0;
for k=1:il
x=O(j,k);
c=center(i,k);
diff = x-c; dis = dis + diff.^2;
70
end
phi(j)=exp((-dis)/(2*sig^2));
output_of_hiddenn(j)=phi(j);
end
(ii) Find inputs to nodes in the output layer.
input_to_outputn=output_of_hiddenn*hou;
(iii) Compute the actual output (for output layer
neurons)
for b = 1:ol
output_of_outputn(b)=(input_to_outputn(b)/α);
end
(iv) Find the difference between previous weight
value and current weight value.
(v) If the difference is equal to zero, stop training, else
find the weight update value i.e., delta
( )( )1d inv det hou _ old ;=
for k=1:output_neurons
( ) 3 5 7 9 11
2 k k k k k
13 15k k
d k [3m 4m 2.92m 5m 3.417m
0.78m 0.056m ]
= − + − +
− +
end
T1 2deloutput (d d ) O= − × ;
(vi) Update the weights between hidden and output
layer by the equation
W(t 1) W(t) lrp deloutput (t) ;+ = + × + ε
Step 9: Evaluate M(t) and postprocess it to obtain the original
signals.
Step 10: Repeat steps 8 and 9 until the difference between the
previous weight value and the current weight value
is not equal to zero.
71
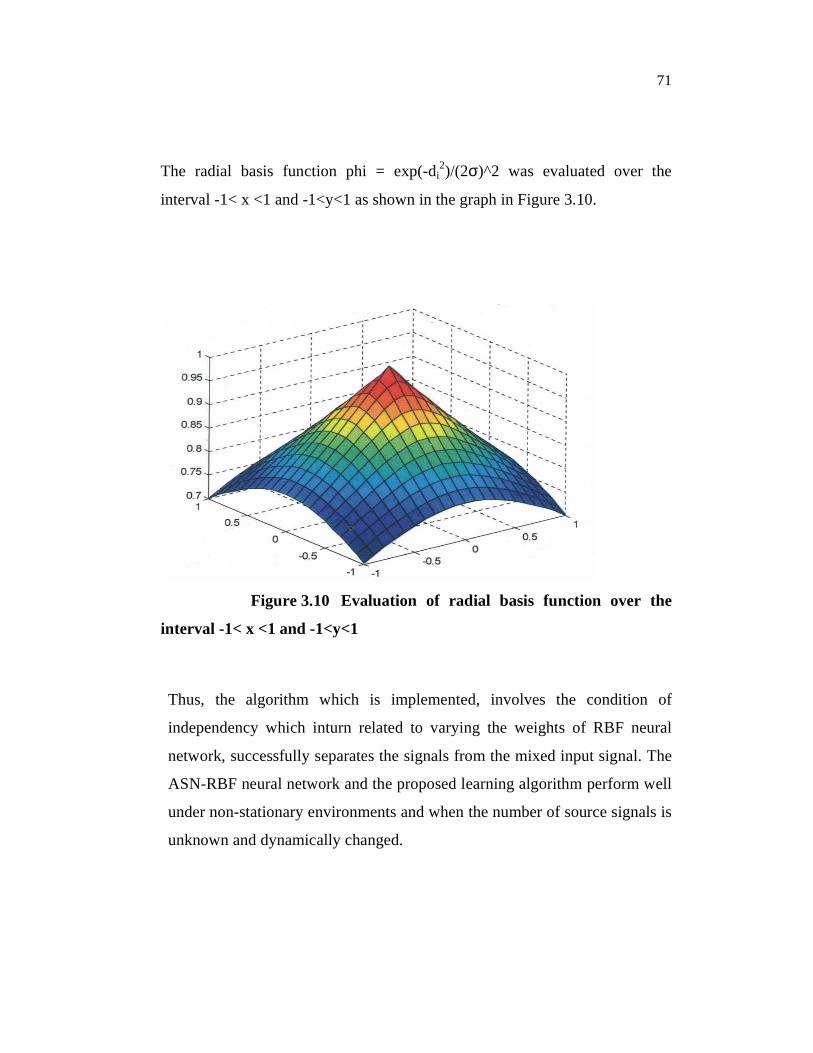
The radial basis function phi = exp(-di2)/(2σ)^2 was evaluated over the
interval -1< x <1 and -1<y<1 as shown in the graph in Figure 3.10.
Figure 3.10 Evaluation of radial basis function over the
interval -1< x <1 and -1<y<1
Thus, the algorithm which is implemented, involves the condition of
independency which inturn related to varying the weights of RBF neural
network, successfully separates the signals from the mixed input signal. The
ASN-RBF neural network and the proposed learning algorithm perform well
under non-stationary environments and when the number of source signals is
unknown and dynamically changed.