chapter 32011).pdf · ¥ vector notation ¥ when handwritten ... ¥ continue drawing the ......
TRANSCRIPT

1
Chapter 3
Vectors
Prof. Raymond Lee,revised 9-2-2010

2
• Coordinate systems
• Used to describe a point’s position in space
• Coordinate system consists of• fixed reference point called origin
• specific axes with scales & labels
• instructions on how to label a point relative toorigin & axes

3
• Cartesian coordinate system
• Also called rectangularcoordinate system
• x- & y- axes intersect atorigin
• Points are labeled (x,y)
(compare Fig. 3-9, p. 41)

4
• Polar coordinate system
• Origin & reference line arenoted
• Point is distance r from originin direction of angle ! that’s
CCW from reference line
• Points are labeled (r,!)
(compare Fig. 3-8, p. 41)

5
• Polar to Cartesian coordinates
• Based on forming righttriangle from r & !
• x = r cos !
• y = r sin !
(compare figure on p. 43)

6
• Cartesian to polar coordinates
• r is hypotenuse & ! an angle
• ! must be CCW from +x axisfor these equations to bevalid

7
• Cartesian example
• Cartesian coordinates of apoint in xy plane are (x,y) =(-3.50, -2.50) m, as shown infigure. Find this point’s polarcoordinates.
• Solution: From Eq. 3-6,
•
•
(SJ 2008,p. 54)

8
• Vectors & scalars
• A scalar quantity is completely specifiedby a single value with an appropriateunit & has no direction.
• A vector quantity is completelydescribed by a number & appropriateunits + a direction.

9
• Vector notation
• When handwritten, use a tilde underscore: A
• When printed, vector will be in boldface: A
• When dealing with just the vector magnitude inprint, use italics: A or |A|
• Vector magnitude has physical units & is always a+ number
~
10
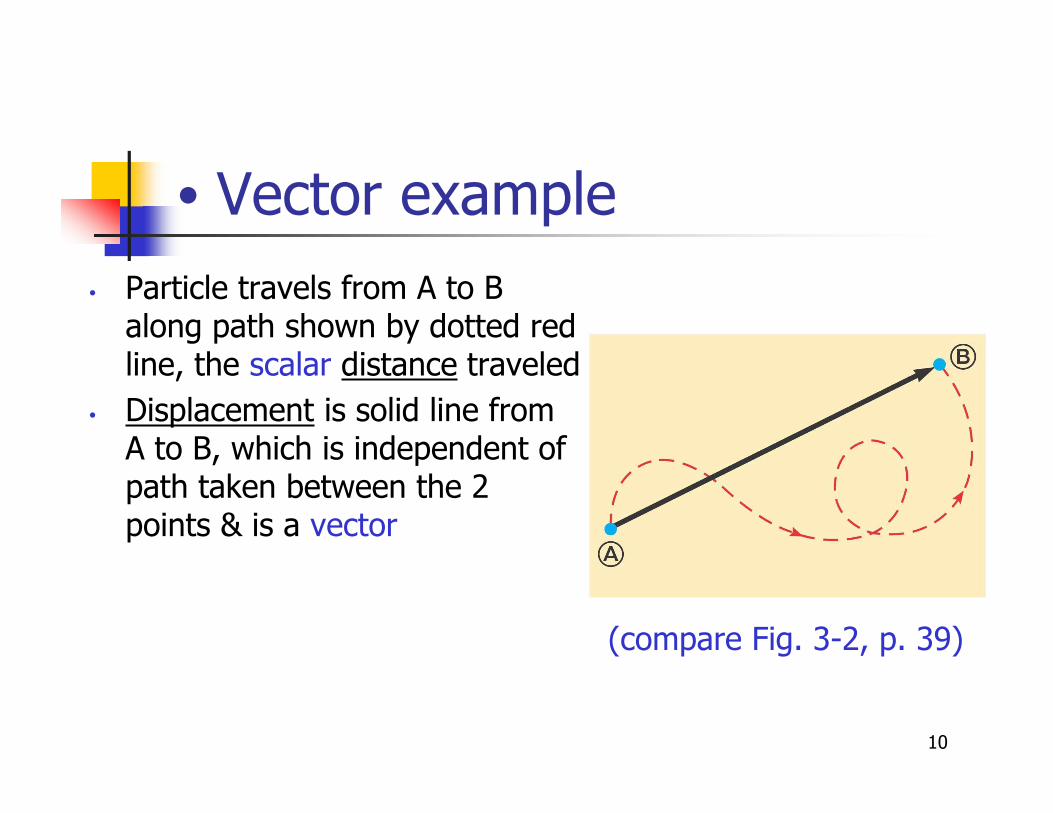
• Vector example
• Particle travels from A to Balong path shown by dotted redline, the scalar distance traveled
• Displacement is solid line fromA to B, which is independent ofpath taken between the 2points & is a vector
(compare Fig. 3-2, p. 39)
11
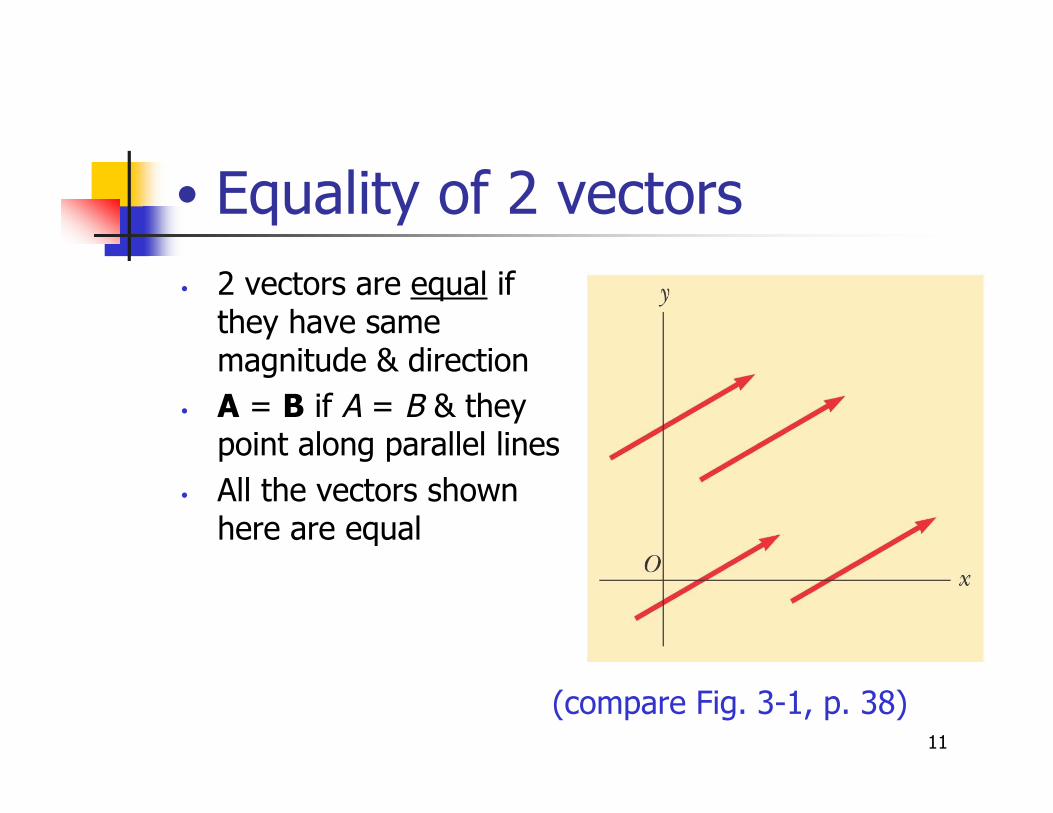
• Equality of 2 vectors
• 2 vectors are equal ifthey have samemagnitude & direction
• A = B if A = B & theypoint along parallel lines
• All the vectors shownhere are equal
(compare Fig. 3-1, p. 38)

12
• Adding vectors
• When adding vectors, must take into accounttheir directions; units must be the same
• Graphical Methods• Use scale drawings
• Algebraic Methods• More convenient

13
• Adding vectors graphically
• Choose a scale
• Draw 1st vector A with appropriate length &in direction specified w.r.t. a coordinatesystem
• Draw 2nd vector with appropriate length &in direction specified w.r.t. a coordinatesystem whose origin is end of vector A & is|| to coordinate system used for A

14
• Adding vectors graphically, 2
• Continue drawing thevectors “tip-to-tail”
• Resultant is drawn fromtail of A to tip of lastvector
• Measure length of R &its angle• Use scale factor to
convert R’s length toactual magnitude
(compare Fig. 3-3, p. 39)

15
• Adding vectors graphically, 3
• If have many vectors,repeat process until allare included
• Resultant is still drawnfrom origin of 1st vectorto end of last vector
(compare Fig. 3-4, p. 39)

16
• Adding vectors, rules
• When we add 2 vectors,sum is independent oforder of addition.• This is commutative law of
addition
• A + B = B + A
(compare Fig. 3-8, p. 39)

17
• Adding vectors, rules 2
• When adding ! 3 vectors, sum is independent of theway in which individual vectors are grouped• This is called associative property of addition
• (A + B) + C = A + (B + C)
(Fig. 3-3, p. 39)

18
• Adding vectors, rules 3
• When adding vectors, all vectors musthave same units
• All vectors must measure same physicalquantity (e.g., can’t add a displacementto a velocity)

19
• Negative of a vector
• Negative of a vector is defined as vectorthat, when added to original vector, !resultant of zero• Represented as –A
• A + (-A) = 0
• – vector has same magnitude, butpoints in opposite direction

20
• Subtracting vectors
• Special case of vectoraddition
• If A – B, then use A+(-B)
• Continue with standardvector addition procedure
(compare Fig. 3-6, p. 40)

21
• Multiplying or dividing vector by a scalar
• Result of multiplication or division is a vector
• Vector’s magnitude is multiplied or divided byscalar
• If scalar > 0, direction of result is same as oforiginal vector
• If scalar < 0, direction of result is oppositethat of the original vector

22
• Vector components
• A component is a part wholevector & is most useful withrectangular components
• Shown are projections ofvector along the x- & y-axes
(compare Fig. 3-8, p. 41)
23
• Vector components
• Ax & Ay are component vectors of A
• They are vectors & follow all rules for vectors
• Ax & Ay are scalars & are called thecomponents of A

24
• Vector components, 2
• Vector’s x-component is its projectionalong x-axis
• y-component is vector’s projectionalong y-axis
• Then which gives

25
• Vector components, 3
• y-component is moved to endof x-component
• Valid since any vector can bemoved || to itself withoutbeing affected• This movement completes
triangle
(compare Fig. 3-8, p. 41)

26
• Vector components, 4
• Previous equations are valid only if ! ismeasured with respect to the x-axis
• Components are legs of right triangle whosehypotenuse is A
• May still have to find " w.r.t. + x-axis

27
• Vector components, 5
• Components can be +or – & will have sameunits as original vector
• Components’ signsdepend on angle !
(Fig. 3.13, p. 60)

28
• Unit vectors
• Unit vector is dimensionless vector withmagnitude = 1.
• Use unit vectors to specify a direction &have no other physical significance

29
• Unit vectors, 2
• Symbols
represent unit vectors
• They form a set ofmutually perpendicular(#) vectors
kand,j,i
(compare Fig. 3-13, p. 44)
30
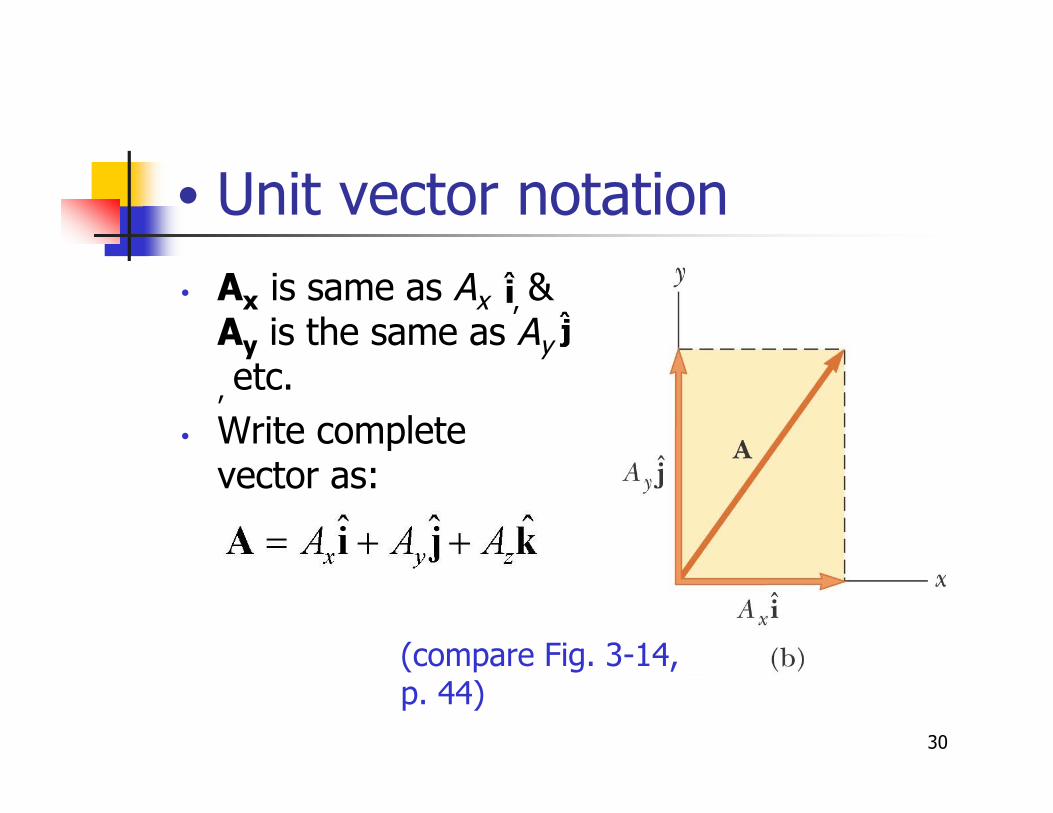
• Unit vector notation
• Ax is same as Ax , &Ay is the same as Ay
, etc.
• Write completevector as:
(compare Fig. 3-14,p. 44)

31
• Adding vectors using unit vectors
• Using R = A + B
• Then
• & so Rx = Ax + Bx & Ry = Ay + By
32
• Trig function warning
• Component equations {Ax = A cos(!) & Ay =A sin(!)} apply only when angle is measured
w.r.t. x-axis (preferably CCW from + x-axis).
• Resultant angle {tan(") = Ay/Ax} gives angle
w.r.t. x-axis.• Think of triangle being formed & corresponding !;
then use appropriate trig functions

33
Adding vectors with unit vectors(SJ 2008 Fig. 3.16, p. 61)
34
• Adding vectors using 3D unit vectors
• Using R = A + B
• Rx = Ax + Bx , Ry = Ay + By & Rz = Az + Bz
• etc.

35
• Example: Taking a hike
• A hiker starts a trip by first walking 25.0 kmSE from her car. She stops & sets up her tentfor the night. On 2nd day, she walks 40.0 kmin a direction 60.0° N of E, at which point shediscovers a forest ranger’s tower.
{SJ 2008, p. 63}

36
• hiking example, p. 2
• (A) Determine components ofhiker’s displacement for each day.
Solution: We conceptualize problem by drawing asketch as in figure above. If we denote displacementvectors on 1st & 2nd days by A & B respectively, & usecar as coordinate origin, we get vectors shown in figure.Drawing resultant R, we can now categorize this problemas an addition of 2 vectors.

37
• hiking example, p. 3
• Analyze this problem using vectorcomponents. Displacement A hasmagnitude = 25.0 km & is directed45.0° below +x axis.
From Eq. 3-5 (p. 41), its components are:
– value of Ay indicates that hiker walks in –y direction on 1stday. Signs of Ax & Ay also are evident from figure above.

38
• hiking example, p. 4
• 2nd displacement B has amagnitude = 40.0 km & is60.0° N of E.
Its components are:

39
• hiking example, p. 5
• (B) Determine the components ofthe hiker’s resultant displacementR for the trip. Find an expressionfor R in terms of unit vectors.
Solution: The resultant displacement for the trip R = A + Bhas components given by Eqs. 3-10 & 3-11 (p. 44):
Rx = Ax + Bx = 17.7 km + 20.0 km = 37.7 km
Ry = Ay + By = -17.7 km + 34.6 km = 16.9 km
In unit-vector form, we can write the total displacement as
R = (37.7 + 16.9 ) kmji

40
• hiking example, p. 6
• Using Eq. 3-6 (p. 42), we find thatvector R has a magnitude = 41.3km & points 24.1° N of E.
Now finalize. Units of R are km, which is reasonable for adisplacement. From graphical representation in figure, estimatethat hiker’s final position ~ (38 km, 17 km), consistent withcomponents of R in final result. Also, both components of R > 0,putting final position in 1st quadrant of coordinate system, alsoconsistent with figure.

41
• Problem-solving strategy: Adding vectors
• Select a coordinate system
• Try to select a system that minimizes # ofcomponents you must deal with
• Draw a sketch of vectors & label each

42
• Problem-solving strategy: Adding vectors, 2
• Find x & y components of each vector & x & ycomponents of resultant vector
• Find z components if necessary
• Use Pythagorean theorem to get resultant’smagnitude & tangent function to get itsdirection
• Other appropriate trig functions may be needed