chapter 10 image segmentation. preview segmentation subdivides an image into its constituent regions...
Post on 19-Dec-2015
224 views
TRANSCRIPT
Chapter 10
Image Segmentation
PreviewSegmentation subdivides an image into its constituent regions or objects.Level of division depends on the problem being solved.Image segmentation algorithms generally are based on one of two basic properties of intensity values: discontinuity (e.g. edges) and similarity (e.g., thresholding, region growing, region splitting and merging)
Chapter OutlineDetection of discontinuitiesEdge linking and boundary detectionThresholdingRegion-based segmentationMorphological watershedsMotion in segmentation
Detection of Discontinuities
Define the response of the mask:
Point detection:
9
1iii zwR
TR
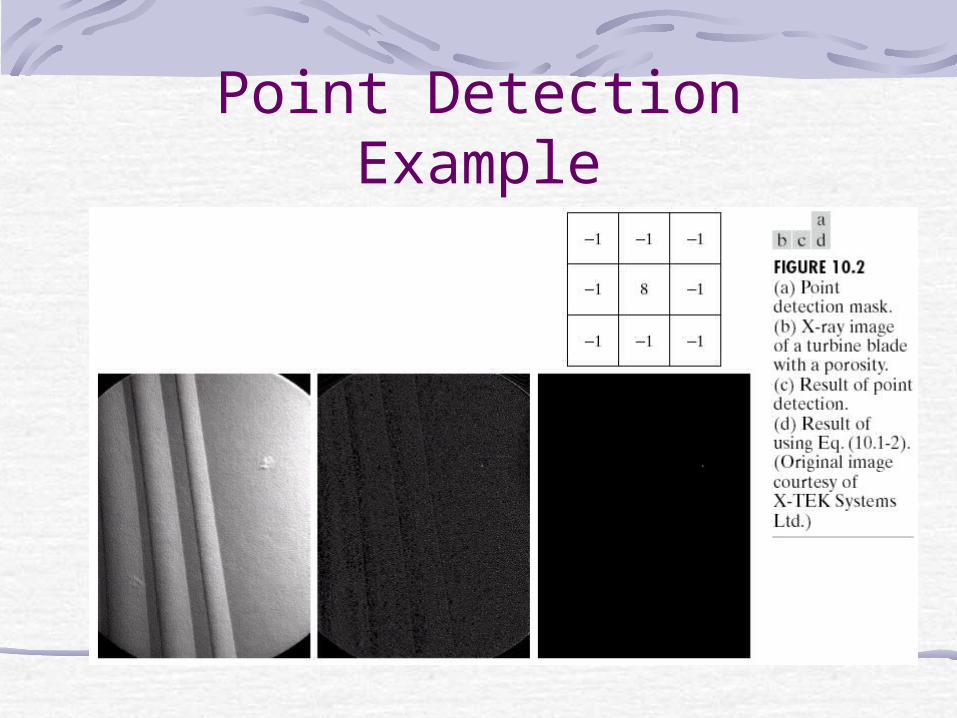
Point Detection Example
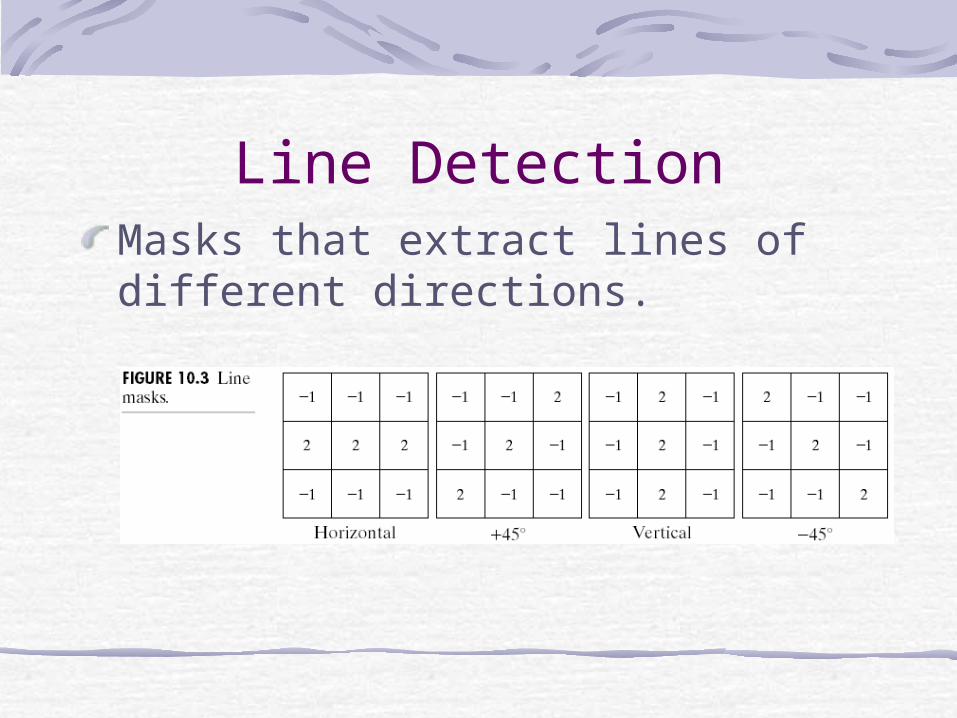
Line DetectionMasks that extract lines of different directions.
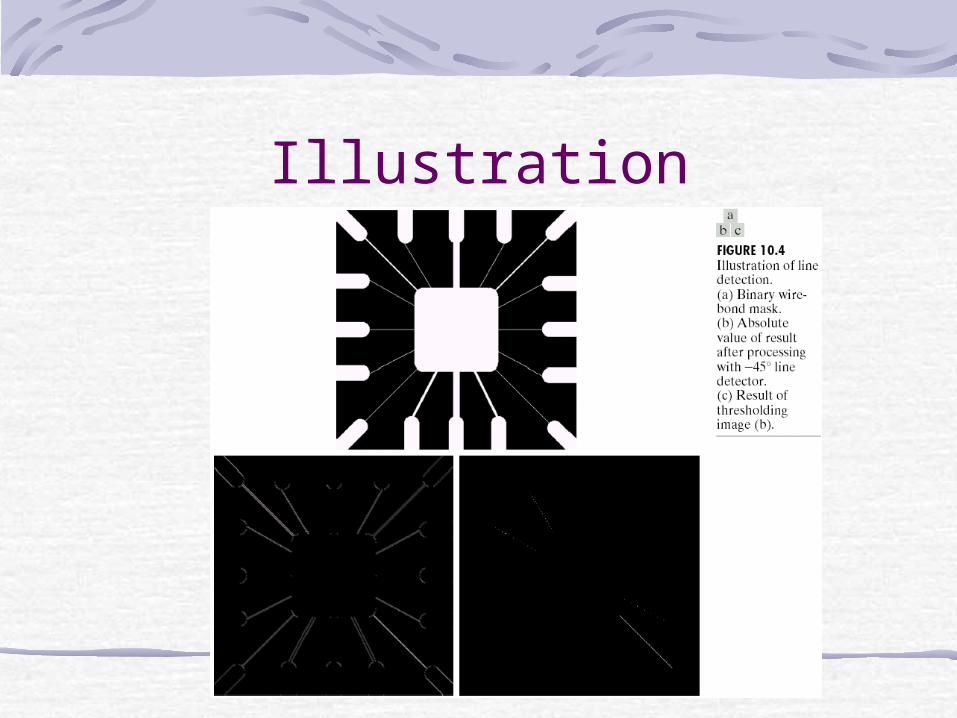
Illustration
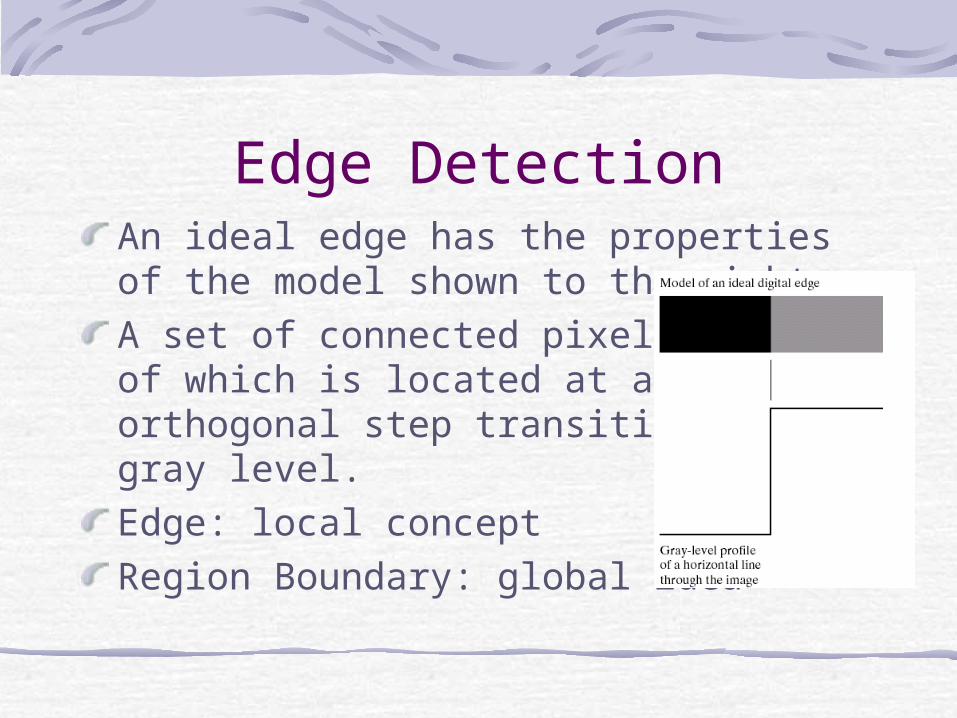
Edge DetectionAn ideal edge has the properties of the model shown to the right: A set of connected pixels, each of which is located at an orthogonal step transition ingray level.Edge: local conceptRegion Boundary: global idea
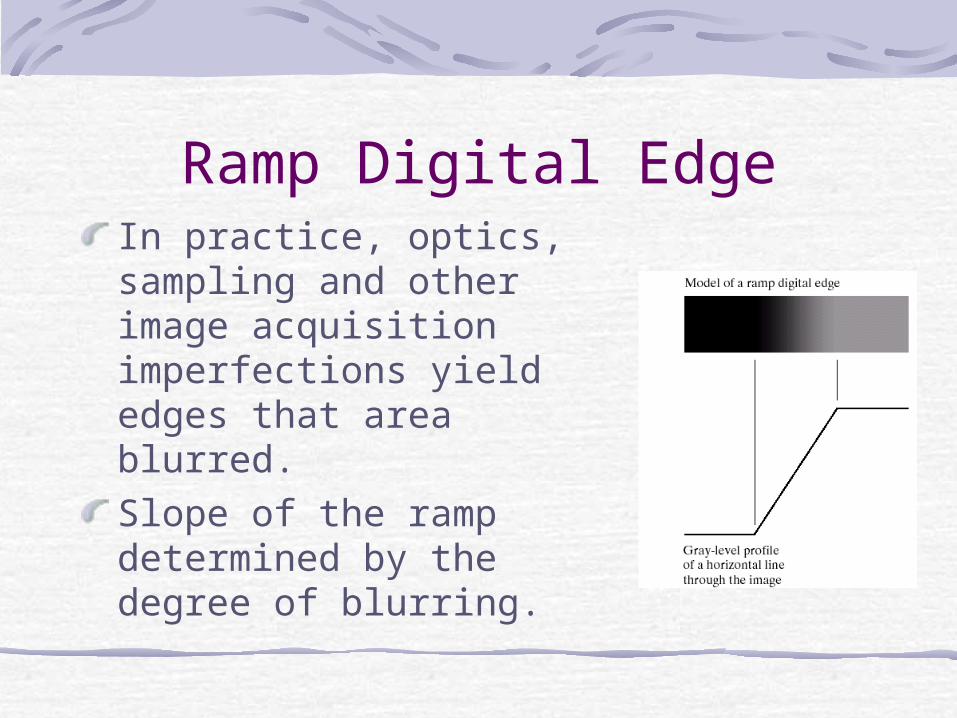
Ramp Digital EdgeIn practice, optics, sampling and other image acquisition imperfections yield edges that area blurred. Slope of the ramp determined by the degree of blurring.
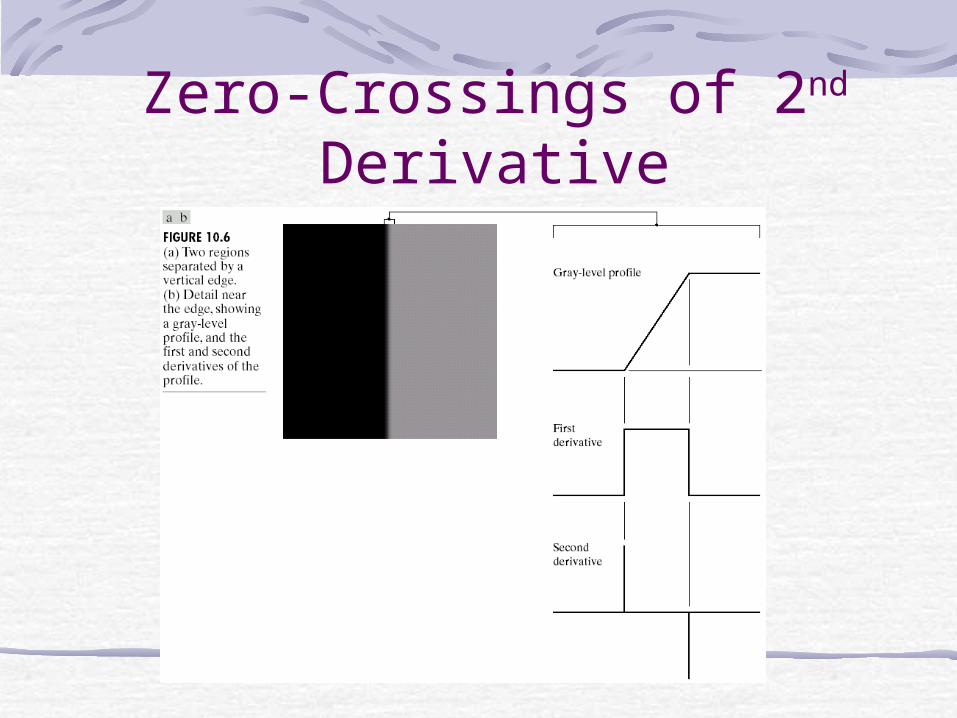
Zero-Crossings of 2nd Derivative

Noisy Edges: Illustration

Edge PointWe define a point in an image as being an edge point if its 2-D 1st order derivative is greater than a specified threshold.A set of such points that are connected according to a predefined criterion of connectedness is by definition an edge.
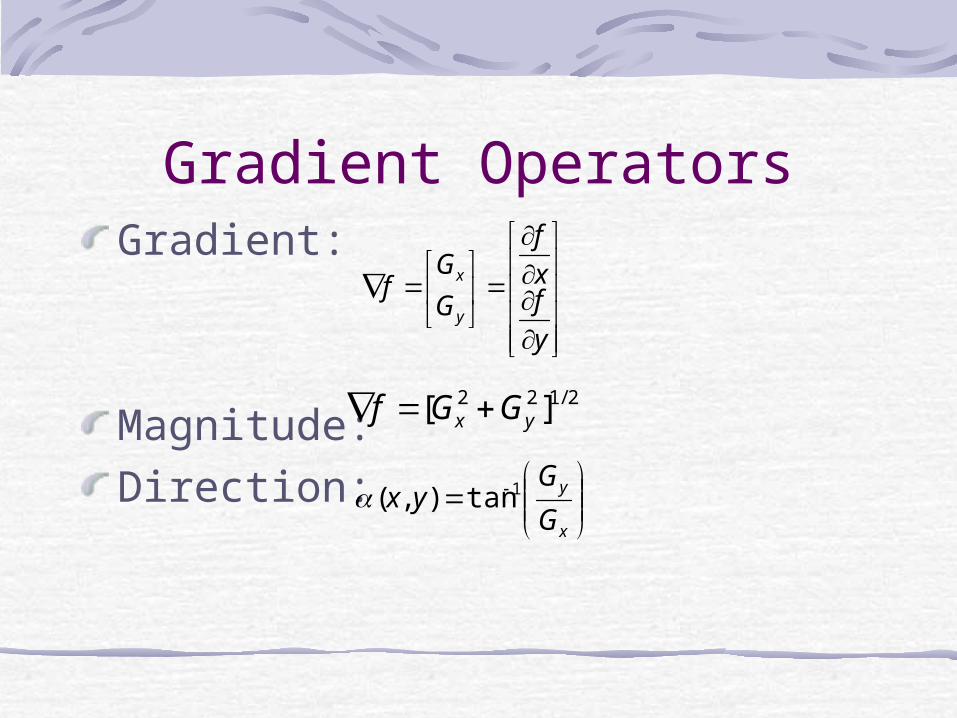
Gradient OperatorsGradient:
Magnitude: Direction:
y
fx
f
G
Gf
y
x
2/122 ][ yx GGf
x
y
G
Gyx 1tan),(
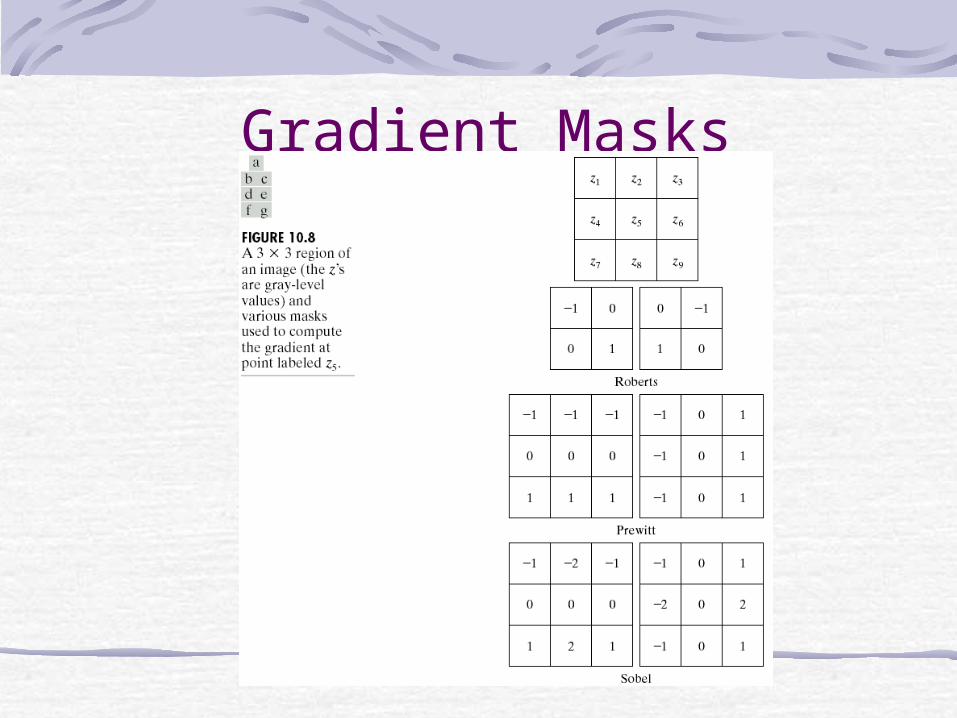
Gradient Masks
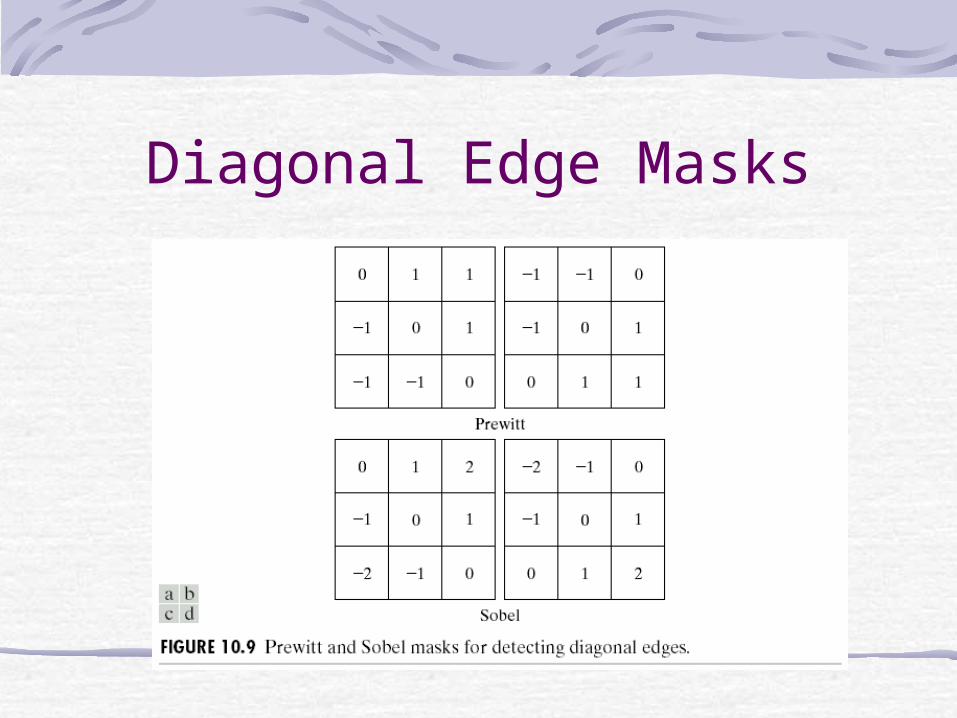
Diagonal Edge Masks
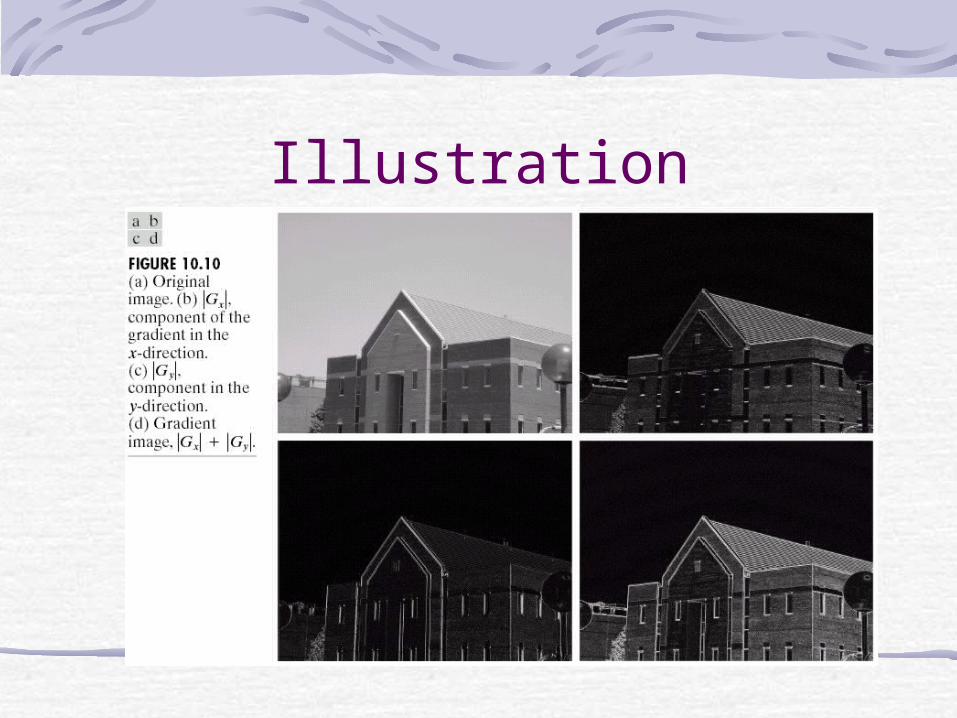
Illustration

Illustration (cont’d)
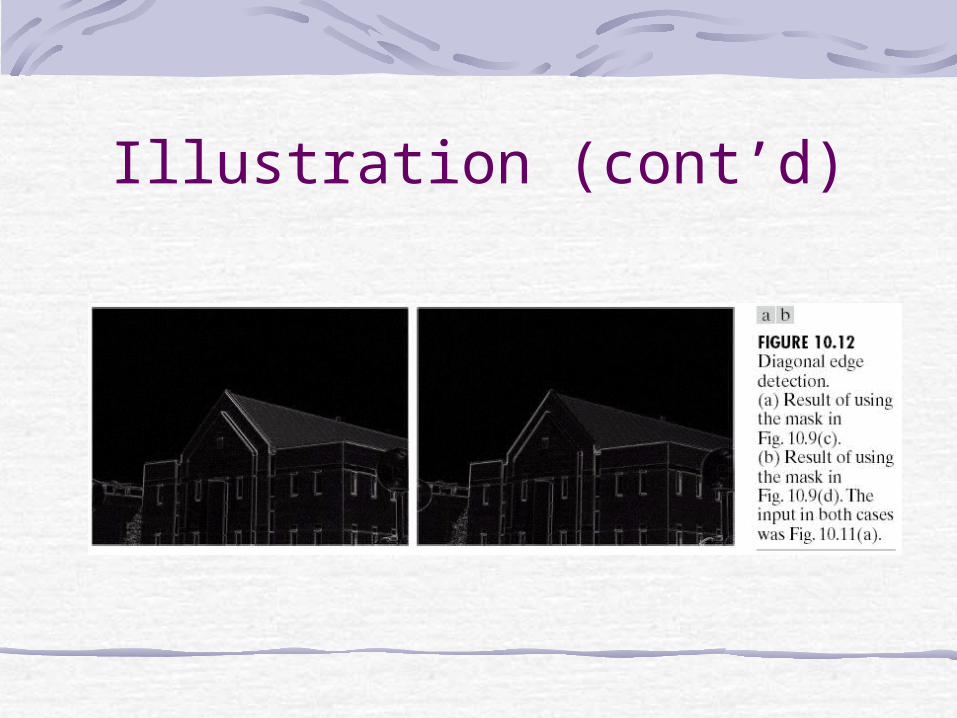
Illustration (cont’d)

The LaplacianDefinition:
Generally not used in its original form due to sensitivity to noise.Role of Laplacian in segmentation:
Zero-crossingsTell whether a pixel is on the dark or light side of an edge.
2
2
2
22
y
f
x
ff

Laplacian of GaussianDefinition:
)2/exp()(
)2/exp()(
224
222
22
rr
rh
rrh
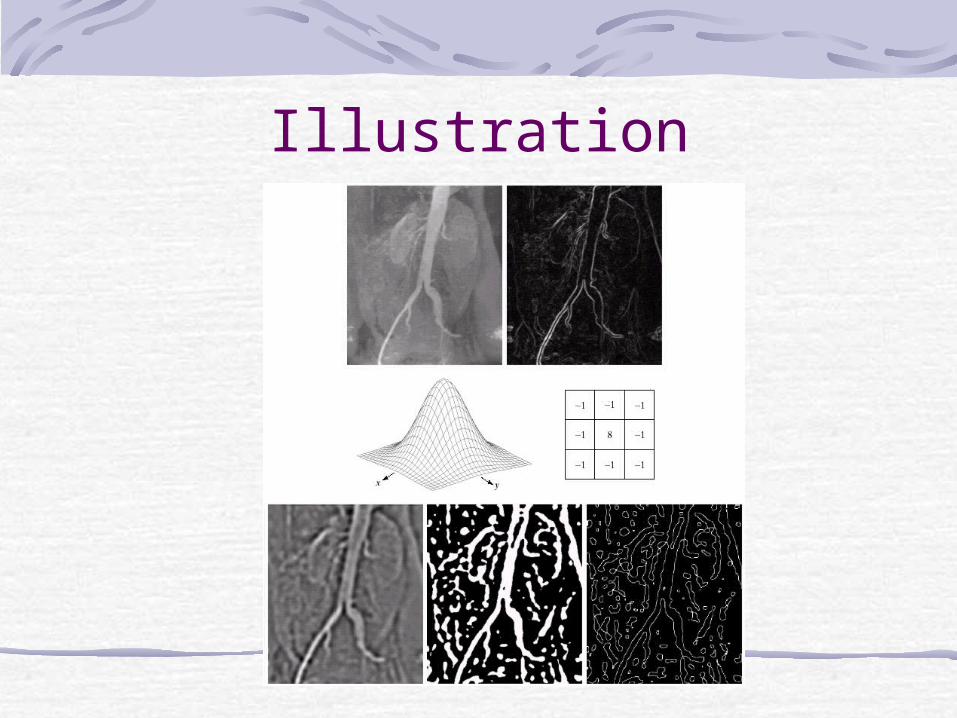
Illustration
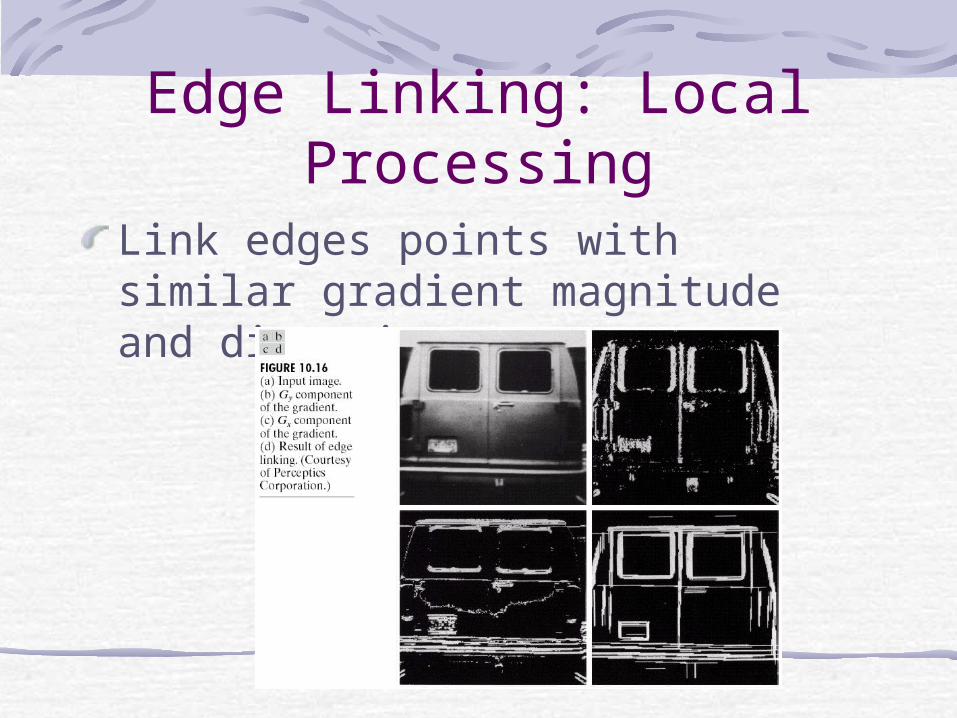
Edge Linking: Local Processing
Link edges points with similar gradient magnitude and direction.
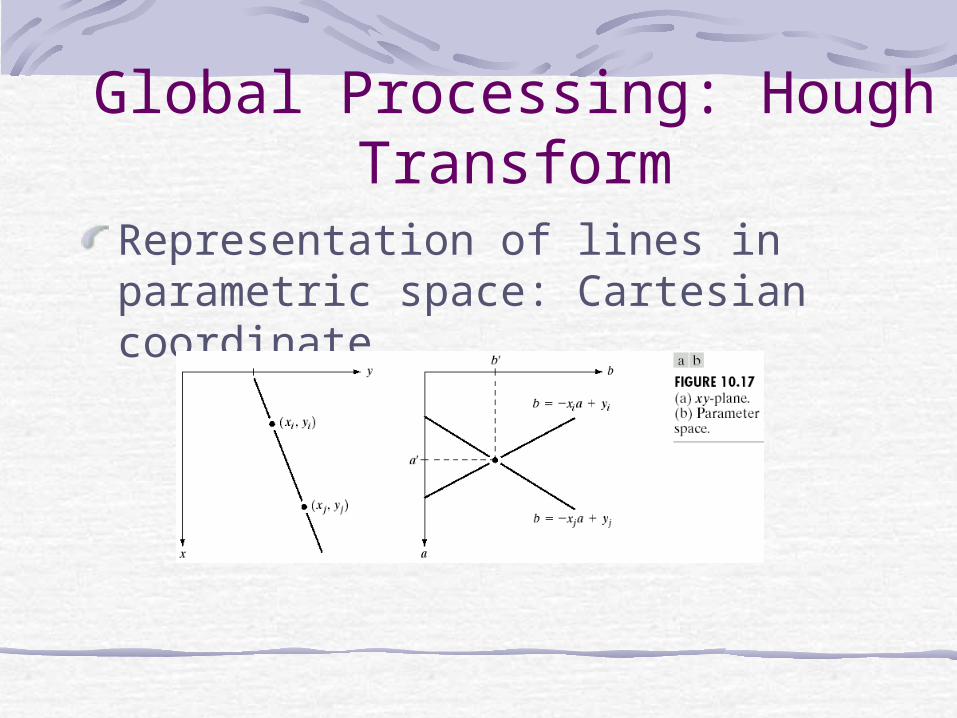
Global Processing: Hough Transform
Representation of lines in parametric space: Cartesian coordinate
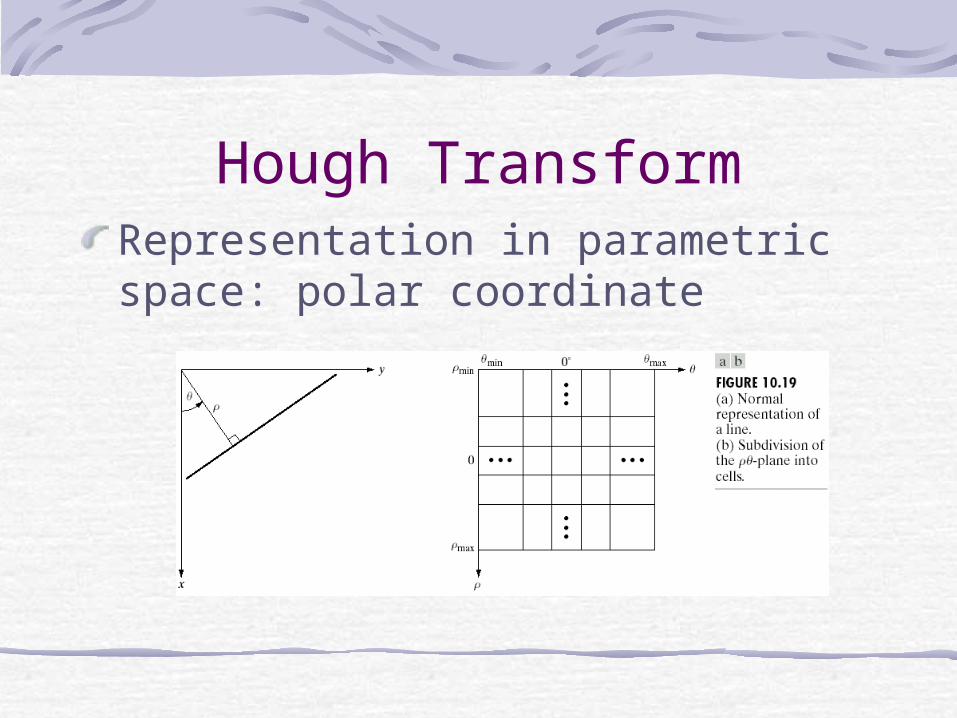
Hough TransformRepresentation in parametric space: polar coordinate

Illustration

Illustration (cont’d)

Graphic-Theoretic Techniques
Minimal-cost path ),(2
1 i
k
ii nncc
)]()([),( qfpfHqpc

Illustration

Example
ThresholdingFoundation: background point vs. object point The role of illumination: f(x,y)=i(x,y)*r(x,y)Basic global thresholdingAdaptive thresholdingOptimal global and adaptive thresholdingUse of boundary characteristics for histogram improvement and local thresholdingThresholds based on several variables
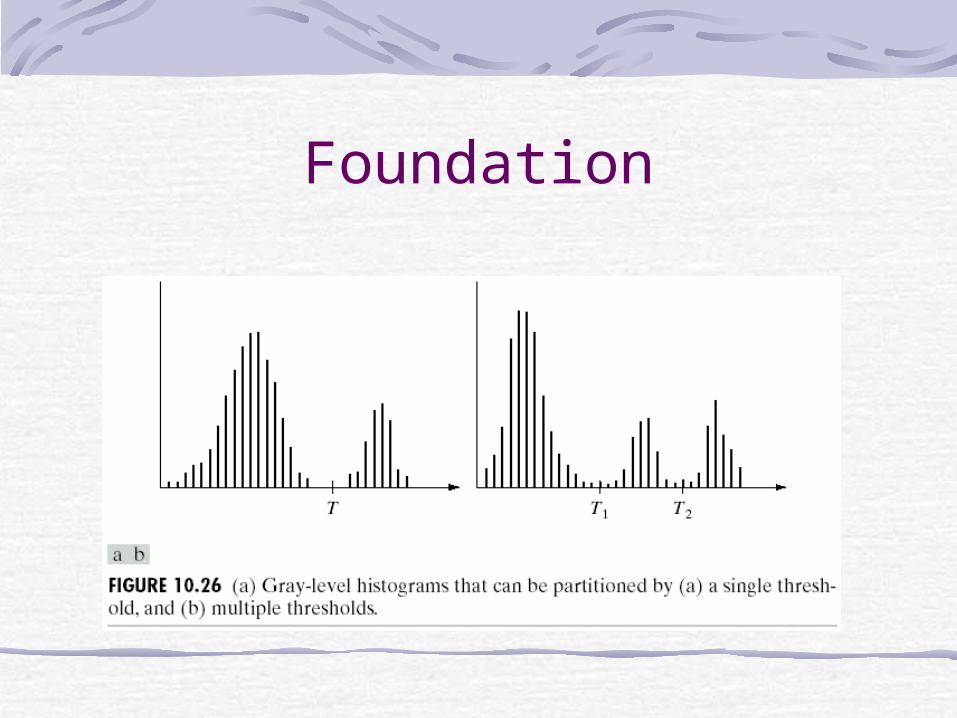
Foundation
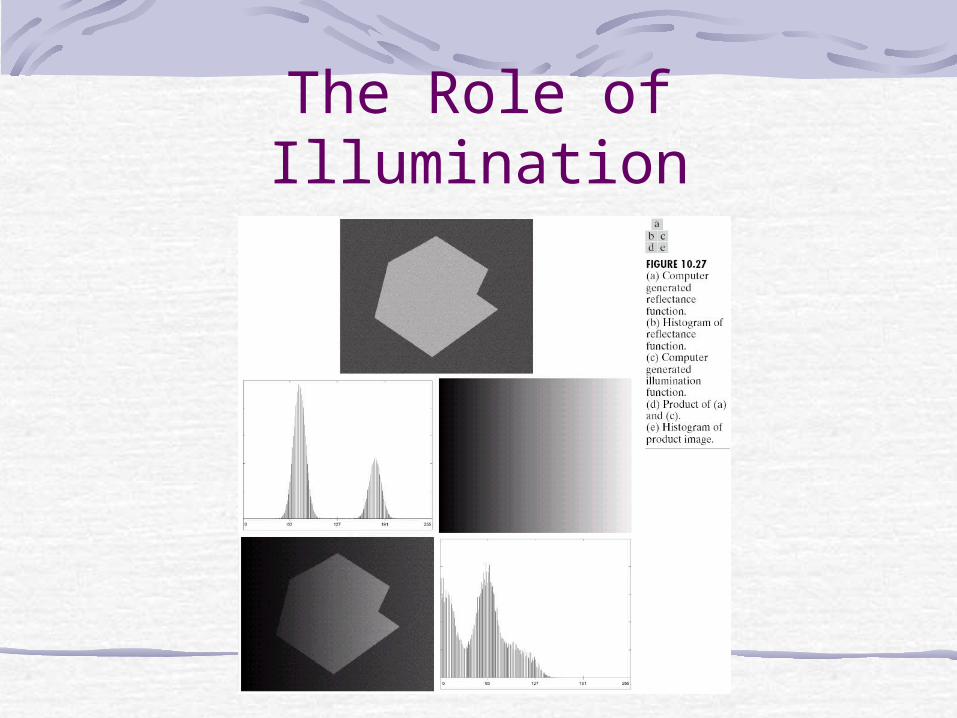
The Role of Illumination

Basic Global Thresholding
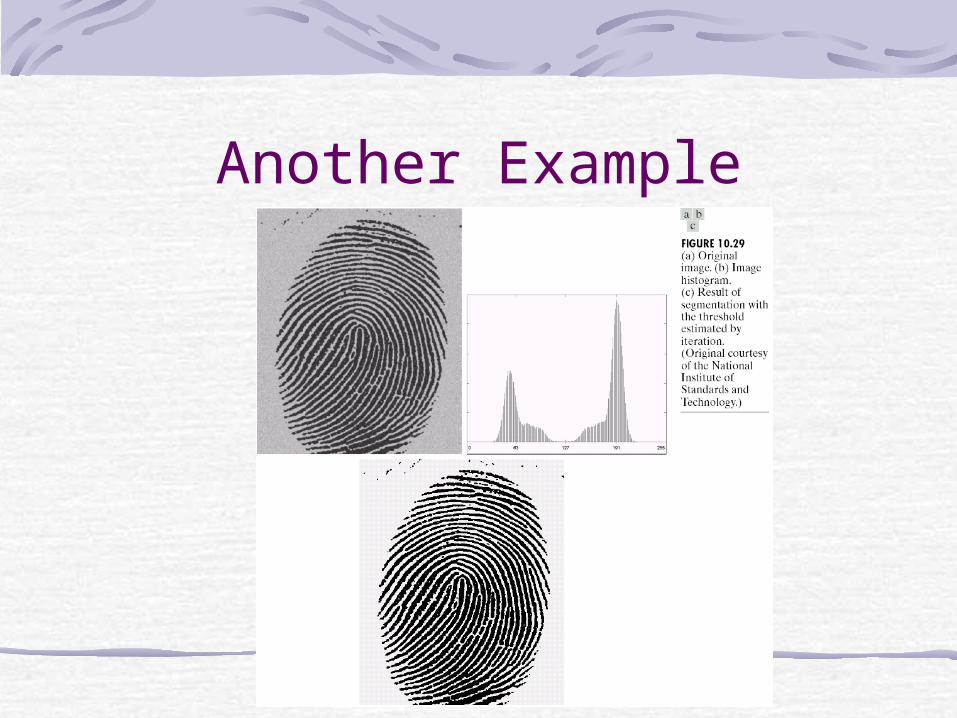
Another Example
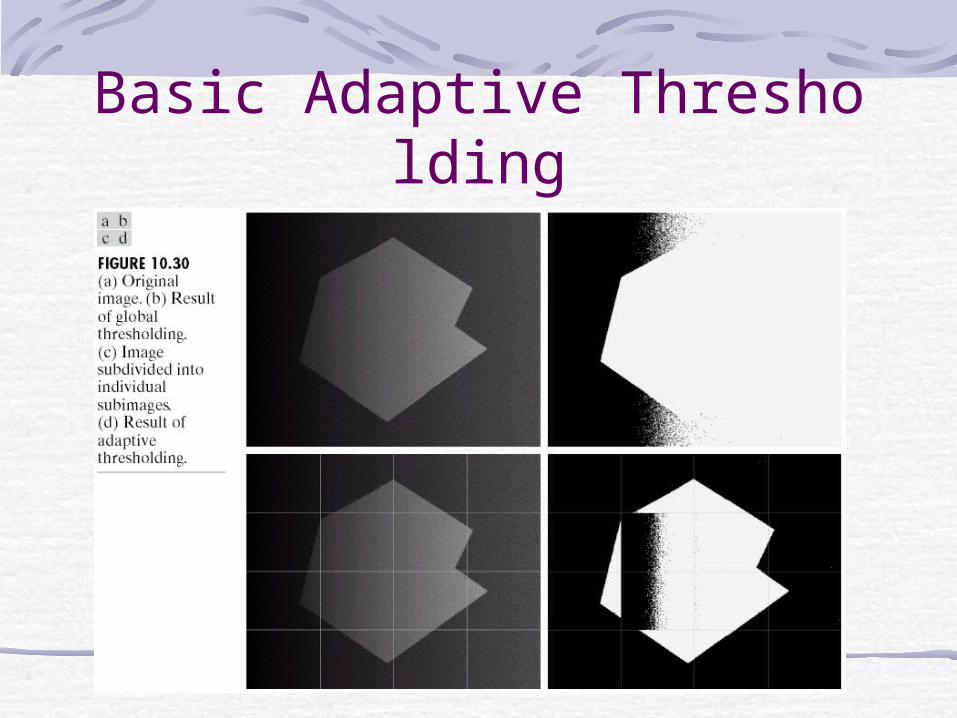
Basic Adaptive Thresholding

Basic Adaptive Thresholding (cont’d)
Optimal Global and Adaptive Thresholding
Refer to Chapter 2 of the “Pattern Classification” textbook by Duda, Hart and Stork.
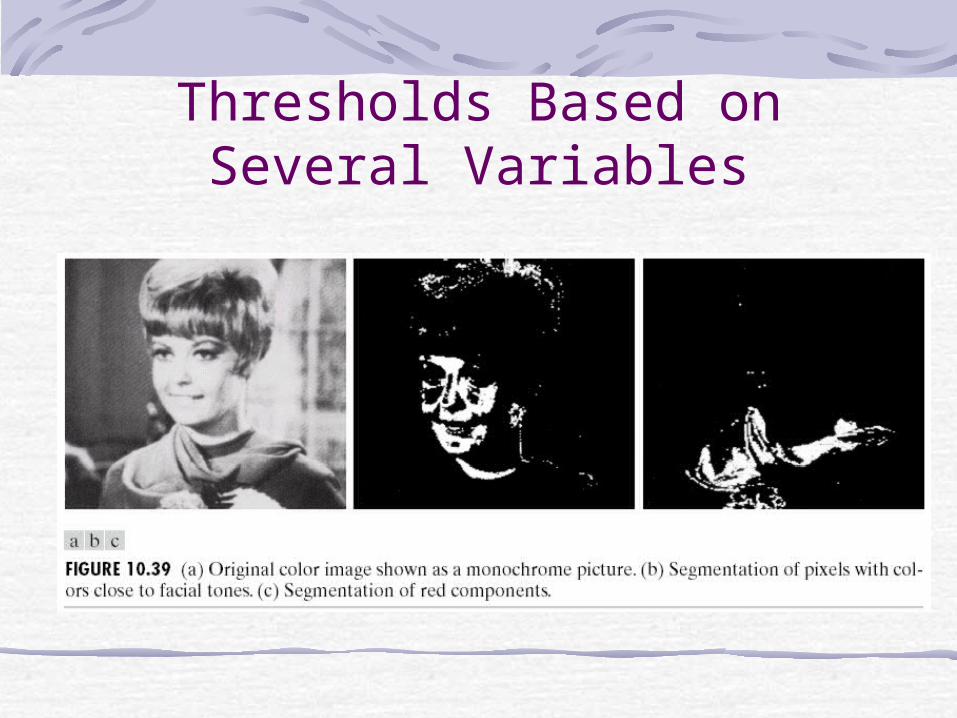
Thresholds Based on Several Variables

Region-Based Segmentation
Let R represent the entire image region. We may view segmentation as a process that partitions R into n sub-regions R1, R2, …, Rn such that:
(a)(b) Ri is a connected region(c)(d) P(Ri)= TRUE for i=1,2,…n(e) P(Ri U Rj)= FALSE for i != j
RRn
ii
1
ji RR
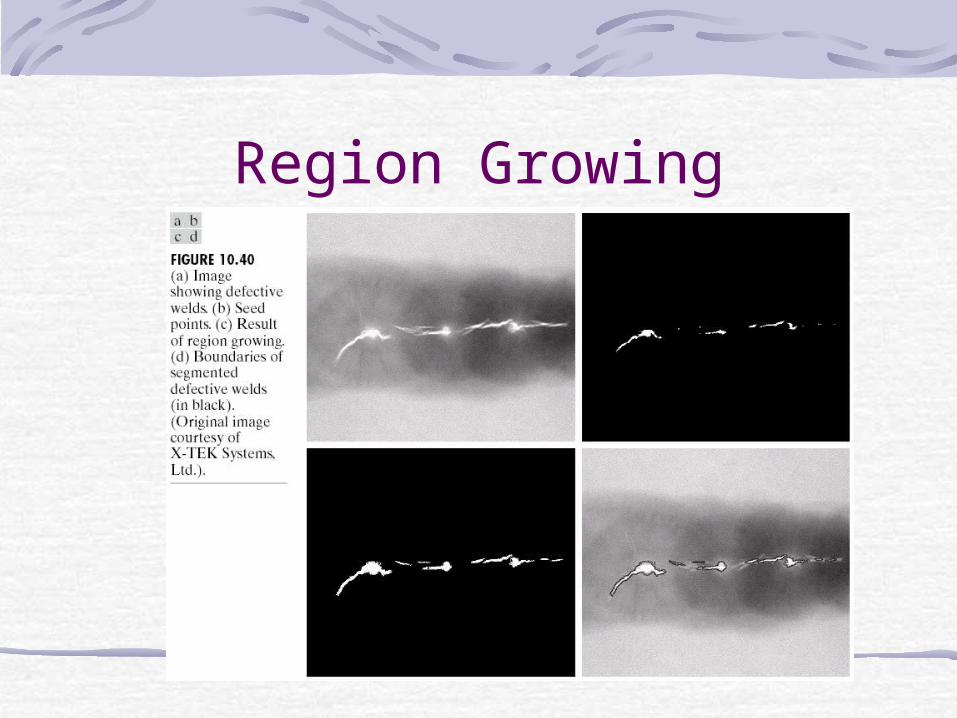
Region Growing
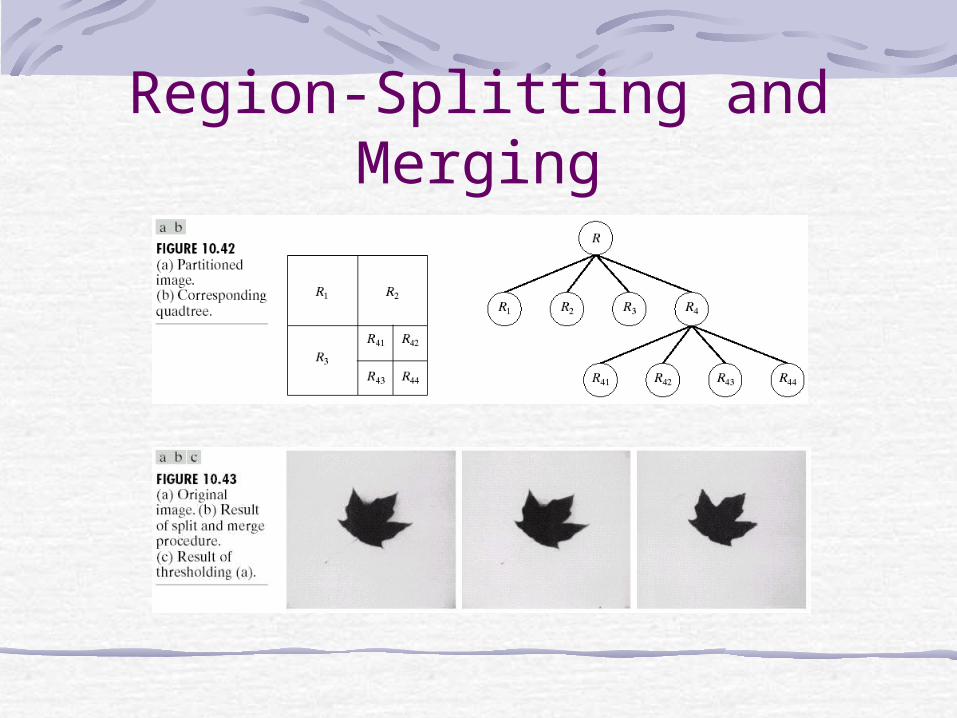
Region-Splitting and Merging
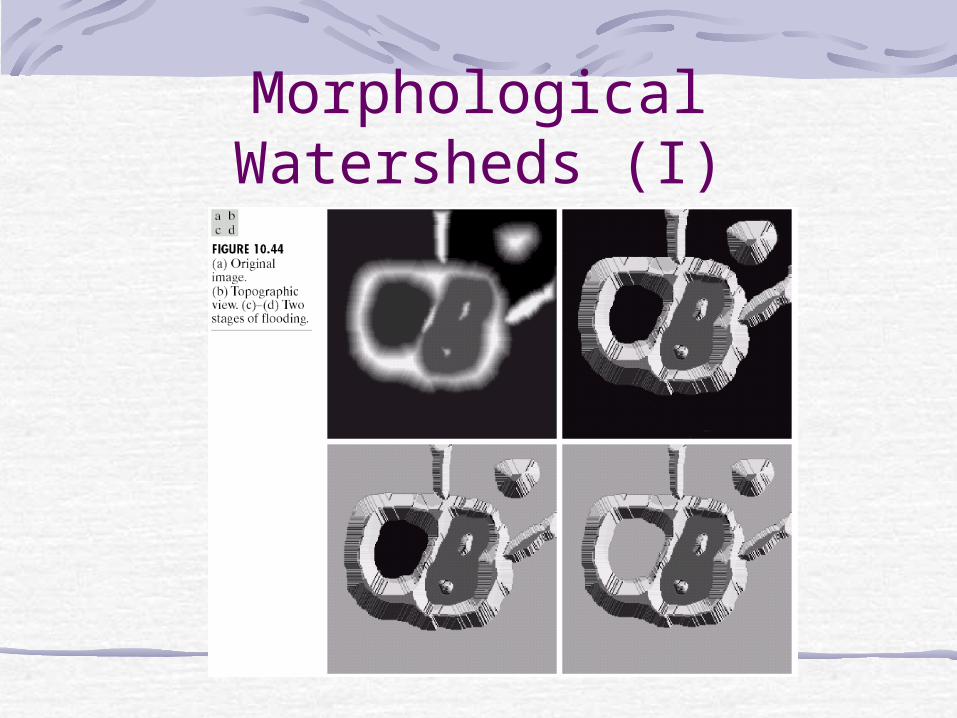
Morphological Watersheds (I)
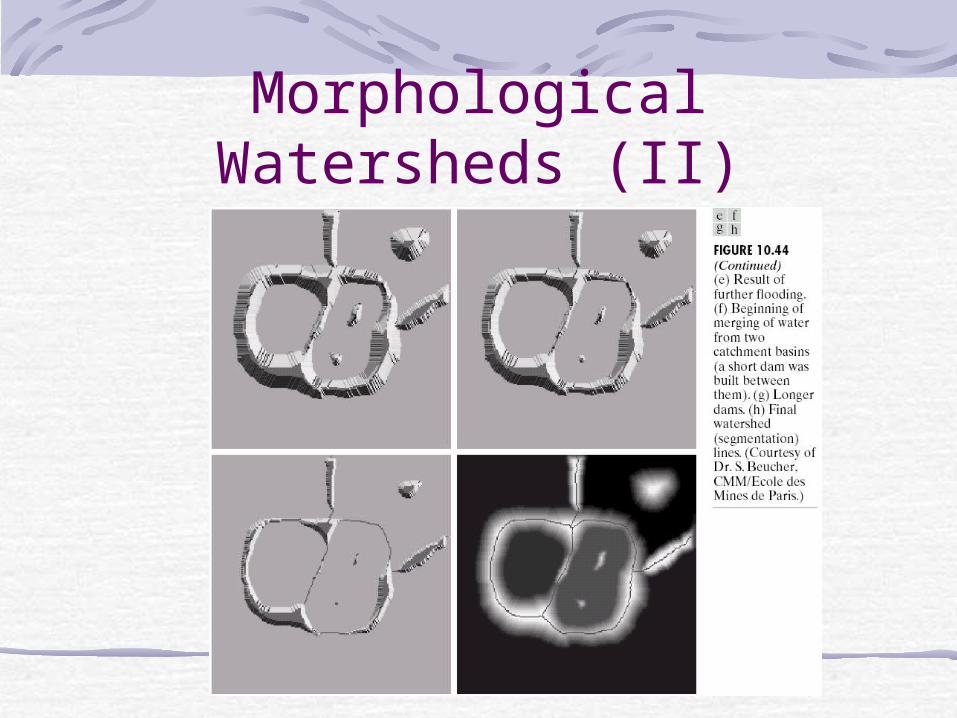
Morphological Watersheds (II)
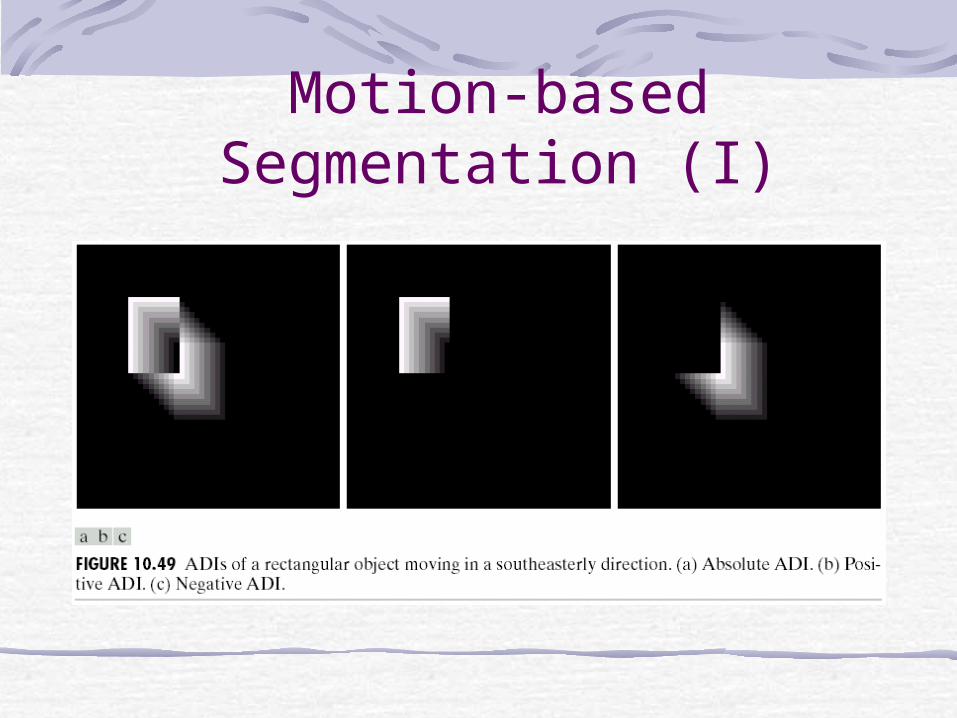
Motion-based Segmentation (I)
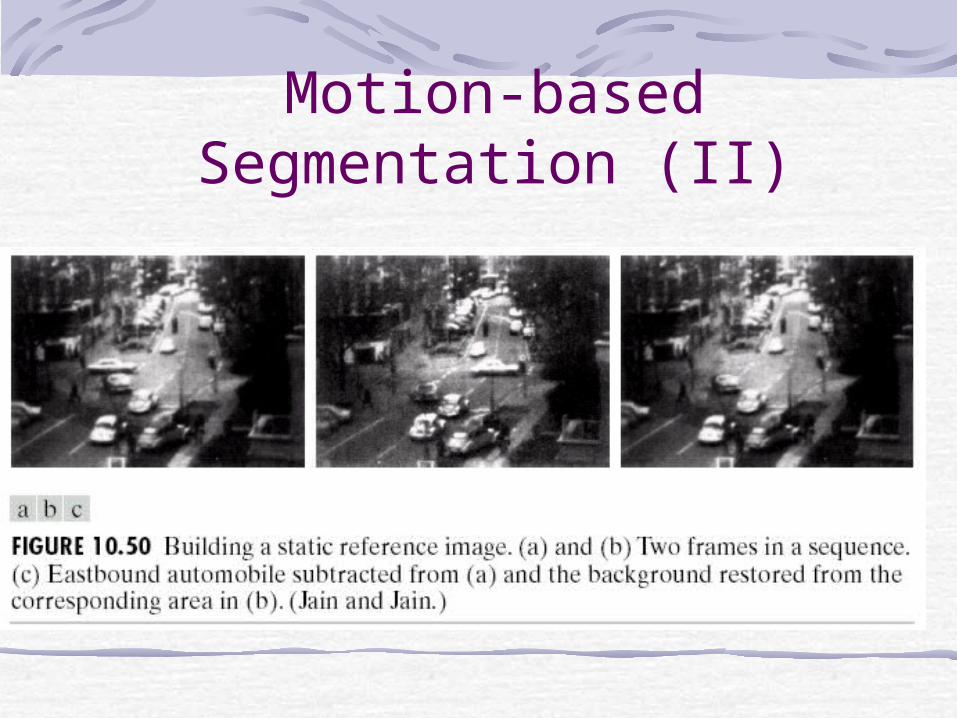
Motion-based Segmentation (II)