cenídef - cenidet · sistema nacional de institutos tecnologicos centro nacional, ... rl pwm an,...
TRANSCRIPT

- .
S. E. P. 'S.E.I.T. D.G.I.T. -
CENTRO NACIONAL DE INVESTIGACIÓN
Y DESARROLLO TECNOL~GICO
cenídef " NUEVA ESTRUCTURA DE INVERSOR BASADO EN EL
CONVERTIDOR CDKD TIPO ELEVADOR "
- - _ _ - - -- T E S I S
QUE PARA OBTENER ELGRADO DE MAESTRO EN CIENCIAS EN INGENIEI~A ELECTR~NICA P R E S E N T A:
NIMROD VÁZQUEZ NAVA C~~~~~ OE INFORMACIO',
' C t N l D E T
DIRECTORES DE TESIS: SEP 'p
DR. JAIME E. ARAU ROFFIEL DR. JAIME ÁLVAREZ GALLEGOS
CUERNAVACA, MOR NOVIEMBRE 1997. Fr lk' !k

S . E. P. S.E.I.T. D.G.I.T.
I CENTRO NACIONAL DE INVESTIGACI~N i Y DESARROLLO TECNOL~GICO
cenidef " NUEVA ESTRUCTURA DE INVERSOR BASADO EN EL
CONVERTIDOR CD/CD TIPO ELEVADOR "
TESIS QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN I-NGENIERÍA ELECTR~NICA
P R E S E N T A :
_l__--_l- NLMROD -S!ÁZQUEZ_NAVA Ingeniero en electrónica por el
Instituto Tecnológico de Celaya
- Directores de tesis:
c DR.JAIME E. ARAU ROFFIEL DR. JAIME ÁLVAREZ GALLEGOS
- Jurado Calificador:
Presidente Dr. Abraham Claudio Sánchez Secretario M.C. Alberto Campos Violante 1" vocal 2" vocal
MC. Domingo Cortés Rodríguez Dr. Jaime Alvarez Gallegos
1 CUERNAVACA, MOR NOVIEMBRE 1997.
I
r ' '! .

S.E.P. S.E.1.T S.N.1.T
CENTRO NACIONAL DE INVESTIGACI~N Y DESARROLLO TECNOLOGICO
ACADEMIA DE LA MAESTR~A EN ELECTR~NICA
cenidei
FORMA RII ACEPTACION DEL TRABAJO DE TESIS
Cuernavaca. Mor. a lode octubre de 1997.
Dr. Juan Manuel Ricaño Castillo Director del cenider Presente
At’n. Dr. Jaime E. Arau Roffiel Jefe del Depto. de Electrónica
Después de haber revisado el trabajo de tesis titulado: “Nueva Estructura de Inversor Basado en el Convertidor cd/cd Tipo Elevador”, elaborado por el alumno Nimrod Vázquez Nava, bajo la dirección del Dr. Jaime Arau Roffiel y el Co-director Dr. Jaime Alvarez Gallegos, el trabajo presentado se ACEPTA para proceder a su impresión.
A T EN EYj T E I L
f m W L L 6 ’ T.ECI~BlOGIC0 -tM MM1IIiKA C.C.P.: M.C. Javier Meneses Ruíz I Pdte. de la Academia de Electrónica
Ing. Dav,id Chávez Aguilar / Jefe del Depto. de Servicios Escolares - .Expediente.
lntcrior Internado Palmira SR.I C.P. 62490
Tels. (73) 18-77-41 y 12-76-13. Fax. 12-24-34 Apartado Postal 5-164. C.P. 62050, Cuernavaca Mor., MCsico cenidet/

SISTEMA NACIONAL DE INSTITUTOS TECNOLOGICOS
CENTRO NACIONAL, DE INVESTIGACION Y DESARROLLO TECNOLOGICO
Cuernavaca, Morelos a 5 de Noviembre de 1997.
Ing. Nimrod Vázquez Nava Candidato al grado de Maestro en Ciencias en Ingeniería Electrónica Presente
Después de haber sometido a revisión su trabajo final de tesis titulado: “NUEVA ESTRUCTURA DE INVERSOR BASADO EN EL CONVERTIDOR C D X D T P O ELEVADOR”, y habiendo cumplido con todas las indicaciones que el jurado revisor de tesis le hizo, le comunico, se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
I ,‘ __I- _-
C.C.P.: Jefe de Servicios Escolares Expediente
Interior internado Palrnira SIN C.P. 62490
Tels. (73) 18-77-41 y 12-76-13, Fax 12-24-34 Apartado Postal 5-161. C.P. 62050. Cuemavaca Mor.. México cenídet/

DEDICO
Especialmente a Dios
Quien nunca me ha dejado solo
A mi esposa . . ~.. I ~~ - l__-.l_l_- - -
~. . . ~
. . . ..~ . ~
.. ~. . . ~~
Quien siempre me ha apoyado . . ..~ ~
I
mi tesis, que con esfuerzo y dedicacih realicé.

AGRADEZCO
A mis asesores
Quienes me apoyaron e impulsaron para realizar este trabajo
A DavidAbud
Que sin su cámara y sus sugerencias, no habría
terminado la maestría
A mis amigos y compañeros de generación . -_ - __
. - -~
Quienes me apoyaron y ayudaron
-
Al personal del Cenidet
Que sin su ayuda, no hubiera terminado este trabajo.
AI CONACYT
Que sin su apoyo económico no habría realizado mis
estudios
TABLA DE CONTENIDO Simbología.
Lista de tablas y figuras.
introducción.
... 111
V
vii
CAPÍTULO 1
ESQUEMAS TRADICIONALES DE INVERSORES
1.1 Introducción. 1 1.2 Panorama general. 2 1.3 Esquemas tradicionales. 4 1.4 Estrategias de control tradicionales. 7 1.5 Solución propuesta. . 10
CAPÍTULO 2
TEORÍA DE OPERACI~N Y ANÁLISIS TEÓRICO
DE LA SOLUCIÓN PROPUESTA. . .. .. .
~
~~ ~ ~ ~~ -
. .~ ~ ~~ ~ ~ - - . . . . . . ~ . ~ , . . . . . . .
~_ ._____
- 12 . ~~~ ~. -~ ~ . . 2.1 .Introducción. 2.1.1. El inversor tradicional. 2.1.2. El inversor elevador. 2.1.3. Extensiones a otro tipo de convertidores.
2.2.1. Modo I de operación. 2.2.2. Modo I1 de operación.
El control por modos deslizantes. 2.4.1. Superficie de deslizamiento. 2.4.2. Existencia del modo de deslizamiento. 2.4.3. Estabilidad dentro de la superficie de deslizamiento
2.2. inversor elevador.
2.3. Modelo del inversor elevador. , 2.4.
CAPITULO 3 _ .
ASPECTOS CR~TICOS DE DISENO 3.1 in&oducción. 3.2 Especificaciones del convertidor propuesto. 3.3 La etapa de potencia.
3.3.1 Diseño para el modo I de operación.
13 15 15 17 18 22 25 26 28 29 30
3 1 32 32 32
i

3.3.2 Diseño para el modo I1 de operación. 3.3.3 Aspectos a considerar en el diseño del inductor y capacitor. El controlador por modos deslizantes. 3.4.1 Diseño del controlador por modos deslizantes. 3.4.2 Implementación fisica. 3.4.3 Referencias. 3.4.4 Limiiadores de fiecuencia. 3.4.5 Diseño del inversor considerando al controlador. El inversor elevador controlado por modos deslizantes.
3.4
3.5 I
CAPÍTULO 4
RESULTADOS OBTENIDOS. 4.1 Introducción. 4.2 Prototipo desarrollado. 4.3 Simulaciones del inversor elevador. 4.4 Resultados experimentales. 4.5 Comparación del inversor con otros esquemas
35 37 38 38 41 42 43 45 47
49 50 51
- 54 59
. Conclusiones. 61 Referencias. 63 Apéndice A. Circuitos esquemáticos. 1 P;péndice-BrPro'gram~s~~~ülacion -( S-~.oñ)T-- IV
~~~~ -~ . .
.. 11
SIMBOLOGÍA
ca
cd
S A I
SF UPS
THD
rl PWM
an, bn
UN
Vin
vo
Comente alterna
Comente directa
Sistema de alimentación inintempible
Sistema fotovoltaico
Sistema de alimentación inintempible, por sus siglas en inglés
Distorsión armónica total, por sus siglas en inglés
Eficiencia
Modulación de anchura de pulso, por sus siglas en inglés
Coeficientes de la sene de Fourier
hgulos de conmutación
Tensión de entrada
Tensión de salida
- -.. - . .
L C
R D
DInm MCC ton
toff
SMC
Va, Vb
IL
VOP
inductancia
Capacitancia
Resistencia
Ciclo de trabajo Ciclo de trabajo máximo
Modo conducción continua
Tiempo de encendido Tiempo de apagado
Control por modos deslizantes, por sus siglas en inglés
Tensión en un capacitor del inversor elevador Comente en el inductor
Valor pico de la tensión de salida
.~
. . .- _ -
... 111

.
I ILP
Gm
Vdc
u
Valor máximo de la tensión del capacitor Valor máximo de la comente del inductor
Ganancia máxima del convertidor
Componente continua de la tensión del capacitor.
Ley de control ( interruptor )
Variables de estado
Derivadas de las variables de estado
Superficie de deslizamiento
Derivada de la superficie de deslizamiento
Parámetros del controlador
Variables de error: variables de estado menos referencias
Control equivalente
Ley de control real Tensión en el inductor
incremento en el tiempo
-
-_I__
Av Rizo de tensión
Ai Rizo de comente
Po Potencia de salida -
Io Comente de salida
fs Frecuencia de conmutación
f Función igual a: s,xz - six,
T Periodo
iv
Capítulo 1 Figura 1.1
I Figura 1.2 Figura 1.3 Figura 1.4 Figura 1.5 Figura 1.6 Figura 1.7 Figura 1.8 Figura 1.9 Figura 1.10 Figura 1.1 1 Figura 1.12 Figura 1.13 Capítulo 2 Figura 2.1 Figura 2.2 Figura 2.3
Diagrama de bloques de un SAi con capacidad de corrección del factor de potencia (CFP). a) Opción con transformador de baja fiemencia b) Opción con etapa elevadora con o sin aislamiento galvánico. Carga no lineal de un SAi. Típica entrada de un equipo electrónico Inversor de onda cuadrada (Ferroresonante). Inversor de onda cuasicuadrada. Inversor de onda escalonada. Inversor P W M con transformador en baja frecuencia. Inversor P W M con enlace en CD. Inversor PWM con convertidor cdcd elevador. Forma de la tensión de salida para una técnica PWM programado. Onda triangular y senoidal para generar el P W . Regulación de tensión del inversor utilizando un compensador PI. Inversor elevador. Inversor elevador: dos convertidores cdcd elevadores.
Inversor puente completo. . Función de ganancia del inversor reductor
2
3 4 5 5 6 6 1 7 9 9
10 11
13 13
~~
Diagrama de bloques de un inversor. ~~ ~~ ~ .14 ' -
Ii&EZZ?f--CoLvx5¿¡or cd/cd reductor, a) unidireccional, b) bidireccional en 14
Figura 2.5 Figura 2.6
Figura 2.7 Figura 2.8 Figura 2.9 Figura 2.10 Figura 2.1 1 Figura 2.12 Figura 2.13 Figura 2.14 Figura 2.15 Figura 2.16 Figura 2.17 Figura 2.18 Figura 2.19 Figura 2.20 Figura 2.21 Figura 2.22 Figura 2.23
. ~. ~~~ .~~ -. ... .. . ...... ~ úmiente. ~
Inversor reductor Convertidor cd/cd- elevador, a) unidireccional, b) bidireccional en comente. Inversor elevador. Inversor derivado del convertidor cdcd reductoríelevador. Inversor derivado del convertidor cdícd cuk. Inversor derivado del convertidor cdcd sepic. Inversor derivado del convertidor cdícd zeta.
Señal de control para el interruptor. ~ - Inversor elevador operado en modo I. Función de transferencia del inversor elevador modo Y. Tensión de salida del inversor.
Comente en el inductor (modo I de operación. ) Tensión deseada en el capacitor (modo I1 de operación). Función de transferencia (modo 11) Comente en el inductor (modo 11 de operación. ) Circuito simplificado del inversor elevador. Plano de fase para a.
.. - ~~ ~~~ ~ ~ ~ . ~ ~ .
Convertidor cd/cd elevador. .~
Tensión en un capacitor (modo I de operación. . . ) . ~- ..
14 15
15 16 16 16 17 17 18 18 19 20 21 21 22 23 24 25 27
v
., .. ,
Figura 2.24 Figura 2.25
Figura 3.1 Convertidor d c d elevador. figura 3.2 Figura 3:3 Tensión del capacitor. Figura.3.4 Figura 3.5 Figura 3i6 Figura3.7
Figura 3.8 Banda de histéresis. Figura 3.9 Retardo. Figura 3.10 Tiempo de encendido constante. Figura 3.. 11 Ley de control. Tabla 3.1 Efectos en la existencia del modo deslizante al cambiar las
especificaciones. Capítulo 4 Figura 4.1 Diagrama del circuito implementado Figura 4.2 Tensión del capacitor con sI = 4 y s2 = 1. Figura 4.3 Plano de fase con sI = 4 y s2 = 1. Figura 4.4 Tensión del capacitor con sI = 1 y s2 = I . Figura 4.5 Plano de fase con's1 = 1 y s2 = 1.
.___i_.Eigura4.6-Tension de1,capacitorcon sl.=.0.26~y s2-=-l-:--- Figura 4 . 7 ~ ~ Plano de fase con SI = 0.26 y s2 = 1. Figura 4.8 Ley de control (u) con SI = 1 y s2 = 1. Figura 4.9 Tensión del capacitor. Figura 4.10 Simulación con cambio de carga. Figura 4.1 1 Voltaje en el capacitor, P0=200W. Figura 4.12 Comente en el inductor, Po=2OOW. Figura 4.13 Tensión y comente de salida, P0=200W. Figura 4.14 Tensión y comente de entrada, Po=2OOW. Figura 4.15 Tensión de salida sin carga. Figura 4.16 Gráfica de THD contra potencia de salida. Figura 4.17 Gráfica de eficiencia contra potencia de salida. Figura4.18 Tensión y comente de salida ante carga no lineal, Po= 144VA
C=liOpF R=240 R. Figura4.19 Tensión y comente de salida ante carga no lineal, Po= 133VA
C=220pF R=240 R. Figura 4.20 Tensión y comente de salida ante cambio de carga de P0=200W a
Po=iOOW y viceversa. Figura 4.21 Tiempo de recuperación ante el cambio de carga. Figura 4.22 Tensión y comente de salida de un inversor tradicional ante carga no
lineal. Tabla 4.1 Lista de componentes.
Plano de fase para u Plano de fase con el control SM
Capítulo 3
Gráfica de la función f con sI = s2 = I .
Gráfica de la función f con sI = 0.2 y s2 = 1. Diagrama de bloques del SMC. Generación de la superficie de deslizamiento. Diagrama para generar la superficie de deslizamiento con el filtro pasa altas.
-. .,
27 21
34 40 40 40 41 42 43
44 44 45 46 48
50 51 5 1 52 52
'52- 53 53 53 54 5 5 5 5 55 56 56 57 51 57
58
58
59 59
50
vi

a electrónica de potencia estudia los diferentes tipos de conversión de energía L eléctrica utilizando dispositivos de estado sólido. Dichas conversiones son de comente alterna a comente directa (cdcd), de comente directa a comente directa (cdcd), de comente alterna a comente alterna (cdca) y de comente directa a comente alterna (cdca ). - _
Actualmente la tecnología de los dispositivos de estado sólido se ha desarrollado considerablemente, lo que ha permitido que la electrónica de potencia haya tomado importancia en numerosas aplicaciones, como lo son los controladores de calor, los controles de iluminación, el control de motores, fuentes de alimentación, sistemas de alimentación inintenumpible, etc. En especial, la conversión cdicd ha tenido grandes y nuevos avances que se han extendido a la conversión cdcd. Hoy en día dichos avances se pueden extender no sólo a la conversión cdcd sino tambien a la conversión cdca con una nueva forma de conceptualizar dicha conversión.
EFICIENCIA EN LA CONVERSI~N CDKA.
, :
.~ ..
En todo tipo de conversión la eficiencia es relevante, debido a que nos indica ,
qué_tanto_se.apra~cha-la-energiaen-la-<Jonversión~~l~roducir-energ~a~~~~st~~o, . . .~ ~ por .
lo que ahomárla es siempre una ventaja apreciable. .. ~~~ - ~~~ -
En la conversión cdca (o inversión) la eficiencia es siempre deseable, ya sea como parte de un sistema de alimentación inintenumpible ( S A I ) o cualquier otro. La eficiencia se vuelve aún más importante cuando se utiliza como fuente primaria un sistema fotovoltaico (SF), ya que la producción de la energía eléctrica es aún mas costosa.
Normalmente la inversión, en aplicaciones como los SA1 y los SF, se ha realizado en dos etapas: una que efectúa el trabajo propio del inversor (conversión cdca) y otra que eleva la tensión. Los inversores tradicionales (que se pueden construir a partir de un convertidor cdcd reductor) son incapaces de obtener una tensión de salida superior a la de entrada y en los SAI, así como en los SF, la fuente primaria de alimentación va de los 12V a los IOOV, por lo que se requiere de una etapa elevadora de tensión que permita entregar como salida 120 V,. ~
Es lógico pensar que un convertidor que utiliza dos etapas en la inversión es menos eficiente si se compara con otro que pueda realizar la misma conversión en una sola etapa, debido a que las pérdidas totales sólo se deberían a una sola etapa y no a la
vii

suma de las dos. Esto conduce a una pregunta importante: ¿se podrá construir un convertidor que eleve tensión, además de invertir, todo esto en una sola etapa?.
RESPUESTA D I N h I C A .
Cuando un sistema está expuesto a cambios repentinos en la carga, como es el caso de un S A i , su forma de operación se ve afectada ocasionando sobretensiones, tensión baja, distorsiones en la forma de onda de salida, etc., lo que trae como resultado destnicción o fallas en el funcionamiento de la carga como lo pueden ser: apagado, reencendido y comportamientos no deseados. Además de lo anterior, los equipos electrónicos que se conectan a un S A i representan para é1 una carga no lineal. Dicha carga (puente rectificador más capacitor) provoca una distorsión en la tensión de salida de manera periódica, llegando a producir una distorsión armónica en la tensión de salida superior al 5%.
Para resolver los problemas anteriores la tensión de salida entregada por un SA1 debe estar libre de distorsiones. Por ello es deseable que el S A i tenga la capacidad de responder rápidamente ante perturbaciones (buena respuesta dinámica) y no se modifique su forma de operación (robustez). Tanto la respuesta dinámica como la robustez de un sistema dependen de la estrategia de control utilizada.
Las técnicas actuales de modulación permiten una salida senoidal con una r a z o ñ a b l e c a l i ~ ~ d ~ ~ ~ i s t ~ s i ó ~ o n i c a t o t a l - i n f a l 5'%<mbajzdo con cargas lineales, aunque la distorsión armónica ante cargas no lineales está muy por encima del 5%.
LO anterior nos indica la necesidad de estudiar estrategias de control que introduzcan robustez y buena respuesta dinámica de los inversores. Una estrategia de control que proporciona buenas características al respecto es el control por modos deslizantes.
Con el panorama antes mencionado, en cuanto a eficiencia y respuesta dinámica, es importante estudiar nuevas estructuras de inversor que puedan elevar tension por sí mismas, así como nuevas estrategias de control con las que se puedan obtener buenos resultados en eficiencia y respuesta dinámica.
En la presente tesis se propone una nueva topología de inversor que se basa en un convertidor cd/cd del tipo elevador para aplicaciones como SA1 y SF con el propósito de mejorar la eficiencia en estos sistemas, así como también se describe y analiza uná estrategia de control por modos deslizantes con el propósito de obtener robustez y una buena respuesta. Durante el trabajo se construyó un prototipo de laboratorio de dicho inversor controlado por modos deslizantes.
... M11

El trabajo está organizado de la siguiente manera: en el capítulo 1 se describe el panorama general de los sistemas de alimentación inintempible y sistemas fotovoltaicos en cuanto a eficiencia y respuesta dinámica, identificándose el problema y proponiéndose una solución. En el capítulo 2 se analiza la solución propuesta: un convertidor y una estrategia de control que presentan buenas características. En el capítulo 3 se presenta el diseño del convertidor y los aspectos de diseño del controlador. En el capítulo 4 se presentan los resultados obtenidos, tanto por simulación como experimentales, del inversor - elevador controlado por modos deslizantes.
Cabe señalar que este trabajo forma parte de un proyecto de colaboración con la Universidad Federal de Santa Catarina, Florianópolis, Brasil, en donde se investigan también otras topologías que puedan elevar e invertir tensión al mismo tiempo.
.
ix

ESQUEMAS TRADICIONALES DE INVERSORES
1.1 Introducción
En este capítulo se describe el panorama general de los sistemas de alimentación inintemunpible y los sistemas fotovoltaicos, así como los problemas que presentan las topologías tradicionales en cuanto a eficiencia y respuesta dinámica. Por último se propone un nuevo esquema de inversor basado en el convertidor cdícd del tipo elevador y el uso de una estrategia de control por modos deslizantes.
I

, ESQUEMAS TRADICIONALES
1.2 Panorama General
En nuestros dias el considerar estrategias encaminadas al ahorro de energía se ha vuelto muy importante, puesto que tal ahorro repercute en la economía nacional. La electrónica de potencia tiene como uno de sus objetivos estudiar las formas en que los equipos sean más eficientes. Aplicaciones como sistemas de alimentación inintempibles [SAI o UPS por sus siglas en inglés) y sistemas fotovoltaicos (SF) tienen una eficiencia baja debido a que están constihidas por varias etapas en cascada y, precisamente en este tipo de aplicaciones donde la alimentación de respaldo se obtiene de una batería, es necesario que las etapas involucradas tengan una eficiencia excelente.
Una de las etapas que conforman a un SAI, mostrada en la figura 1.1, es la de inversión, la que generalmente se realiza mediante el uso de dos bloques. La tensión de batería de entrada oscila entre los 12 y los 48 volts y la salida es una tensión senoidal con valor pico de 12&. Como la topología inversora tradicional no puede elevar tensión, por ser una topología denvada del convertidor reductor (buck), es necesario agregar un bloque que pueda elevar tensión.
La inclusión de la capacidad de elevación en el inversor se puede realizar básicamente de dos maneras: la primera es utilizar un transformador a la salida del
-inversor-(Fig.-l. 1 .a),-el-cualse-diseña-a-baJa-~ecuencia-(6O-~)~-resu~~ando-en-una opción muy poco atractiva debido a que el transformador es voluminoso y pesado; la segunda es utilizar un convertidor elevador con o sin aislamiento de acuerdo a los requerimientos especificados (Fig. 1.l.b); pero por tener dos etapas en cascada la eficiencia se ve reducida debido a que la eficiencia total (qT ) es el producto de las eficiencias de cada etapa.
i 1 i x i12 TI3 x f l4 = T T
I
BATERiA I I- I I INVERSOR
ELEVADOR t b) I ;Etapa cargadora I
I
_ _ _ _ _ _ _ _ _ _ _ - _ _ _ _ _ _ I I
I Etapa inversora
Figura 1 1 Diagrama de bloques de un SAi con capacidad de corrección del factor de potencia (CFP). a) Opción con transformador de baja frecuencia b) Opción con etapa eievadora con o sin aislamiento galvánico.
I I
_ _ - - _ - _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ ~ _ ~ _ l
2

’L *”*
ESQIJEWS TRADICIONALES
La eficiencia del sistema se vena considerablemente aumentada si el inversor pudiera elevar tensión por sí mismo, sin necesidad de incluir dos etapas.
Por otra parte, la carga típica de un inversor en este tipo de aplicaciones de alimentación a cargas críticas son equipos electrónicos que tiene en su entrada, como convertidor cdcd, un puente rectificador y un capacitor conectado, como se muestra en la figura 1.2. Este tipo de equipos es una carga no lineal para el S A I [I].
Este tipo de carga ocasiona una deformación en la tensión de salida del S A I , provocando un incremento de la distorsión armónica total (THD por sus siglas en inglés) en dicha tensión superior al 5%. Cuando los equipos electrónicos sensibles son alimentados con una tensión distorsionada no operan correctamente, por ello para resolver este problema se necesita un control que no permita que la tensión de salida se distorsione.
Los técnicas de modulación tradicionales como son la modulación de anchura de pulso (FWM por sus siglas en inglés) senoidal y programado, no pueden resolver el problema antes mencionado debido a que el esquema de regulación toma varios ciclos de linea; esto se debe a que se reguia el voltaje promedio o efectivo [Z]. Para poder evitar la distorsión de la tensión de salida es necesario hacer una compensación lo más rápida posible, lo cual se puede lograr con un controlador que proporcione una mayor
_ _ _ _. - robustez y una rapida regulación. - - - ..
~ , ......................................... -~ ._ . : 1-1 ~~ sA+-i + Jri Convertidor :
CD/CD :
Carga no lineal ..........................................,
Figura 1.2 Carga no lineal de un SAi. Típica entrada de un equipo electrónico
Los sistemas fotovoltaicos presentan la misma problemática en la etapa de inversión, en cuanto a eficiencia y respuesta dinámica, ya que los voltajes de alimentación y de salida así como la carga, son los mismos que los de un SAI.
3

1.3 asquemas tradicionales
, ESQUEMAS TRADICIONALES
. .
Como se mencionó anteriormente, __ etapa inversora en los esquemas tradicionales en un S A I consta de varias etapas en cascada, resultando un equipo volUminoso ylo con una baja eficiencia. Uno de los esquemas para esta etapa consiste en utilizar un inversor y un transformador en baja frecuencia, dentro de este esquema se pueden diferenciar varias topologías [3]:
Onda cuadrada ( ferroresonante ). Onda casi-cuadrada. Onda escalonada. inversor PWM con transformador en baja frecuencia.
Onda cuadrada.
Este esquema es el más sencillo (Fig. 1.3). La tensión de entrada se conmuta cada medio ciclo de la fiecuencia de salida, por lo que la tensión de salida del inversor tiene una forma cuadrada. Esta forma de onda tiene un alto contenido armónico, por io que se requiere de un filtro de tamaño considerable para producir una tensión senoidal a la salida. Tradicionalmente se utiliza un transformador ferroresonante para el filtrado, que además por su diseño posee una regulación inherente. Este filtro se utiliza debido a
__l__l_ que-el inyersor. no puede regular-la-tensión-de-salida,-dado que-es-una onda cuadrada de- frecuencia constante. _. - - -~ -
Transformador Ferroresonante
Inversor - a
deCA
Figura 1.3 Inversor de onda cuadrada (Ferroresonante)
~ Onda casi-cuadrada.
Este'tipo de esquemas produce una tensión de salida del tipo cuadrado, la diferencia, con el esquema anterior, consiste en que el inversor produce durante un intervalo de tiempo un voltaje cero en la salida; este tiempo se modula con el propósito
4

-
’ ESQIJEEMAS TU3ICIONALES
de regular la tensión de salida. Ai igual que en el esquema anterior, se necesita un filtro considerablemente grande para producir una tensión de salida senoidal.
Y-- inversor I I
Figura 1.4 Inversor de onda cuasicuadrada.
Onda escalonada.
Se utilizan vanos inversores con salida cuadrada para generar un patrón combinado en la tensión de salida, por ejemplo una onda casi-cuadrada. El tamaño del filtro de salida se reduce significativamente en comparación con el utilizado para una onda cuadrada, pero a h es grande. Mientras más inversores con salida cuadrada se utilicen se reduce mis el tamaño del filtro de salida, pero aumenta el costo y disminuye la confiabilidad. Este esquema se utiliza en aplicaciones de aka potencia (cientos de kw). . . ~- .. . ~ ... .. ~
- .- ~ - - , - ~, . ~ . __ ~
. - - . ~. _. . .. ---~- . .. . . . . ~
. . ~~ -. ~. - -_
. . ~. . . ~ I
Entrada de CD -
Figura 1.5 Inversor de onda escalonada
Inversor PK%í con irans-rtnador en baja frecuencia. .. Este tiPo de inversores trabaja con un patrón del tipo PWM, es decir que el
Patrón de conmutación contiene p u h x de anchura variable sobre un ciclo de trabajo; este tipo de esquema reduce considerablemente el tamaño del filtro de salida. En este Caso el transformador que se utiliza para elevar tensión aún resulta una opción pesada y volminos% Puesto que Se diseña a baja frecuencia debido a que el ciclo de histiresis se cumple cada 60Hz
c

. ESQUEMAS TRADICIONALES
Figura 1.6 Inversor P W M con transformador en baja frecuencia.
Las opciones anteriores tienen una gran desventaja: el transformador que utilizan se diseña a baja ffecuencia y por lo tanto resulta pesado y voluminoso. Otro esquema para desarrollar la etapa inversora de un S A I , que reduce significativamente el volumen, consiste en utilizar un convertidor cdcd, con o sin aislamiento, y un inversor. Entre estas opciones se encuentran:
o Inversor PWM con enlace en CD. Inversor PWM con convertidor cdcd elevador.
Inversor PiKU con enlace en CD
Este esquema utiliza un convertidor cdcd puente completo donde el transformador se diseña a alta ffecuencia, por lo que el volumen se reduce en comparación con __ las ____ técnicas ____ anteriores. Así mismo se utiliza un-inxgpor-tWMpxa- reducir el tamaño del filtro de salida. Este esquema tiene muchas etapas en cascada por lo que la eficiencia se reduce considerablemente.
_--_..-
Figura 1.7 Inversor P W M con enlace en CD
Inversor PWM con convertidor c&cd elevador.
Otra opción que tampoco tiene un volumen grande y presenta la ventaja de disminuir el número de etapas en cascada, es utilizar el inversor con un convertidor cdcd elevador. El convertidor ccücd es utilizado para elevar la tensión de las baterías. Esta opción incrementa la eficiencia en comparación con los esquemas anteriores, pero aún es pobre por tener dos etapas en cascada.
6

ESQUEMS TRADICIONALES
Pbtíkí programado.
Figura 1.8 inversor P W M con convertidor cdcd elevador.
Como se describió, todos los esquemas tradicionales o bien resultan en un diseño voluminoso, puesto que se utiliza un transformador de baja &emencia, o bien en una baja eficiencia por tener varias etapas en cascada.
1.4 Estrategias de control tradicionales Las estrategias de control tradicionales se basan en la modulación de anchura de
pulso (PWM). Dicha modulación tiene como objetivo generar un patrón de conmutación para los intemptores del inversor, de manera que éste produzca una tensión de salida con un bajo contenido armónico; reduciéndose así el tamaño del fileo. El esquema con el cual se regula la tensión es independiente de la técnica de modulación, como se verá más adelante. Existen dos maneras de generar una señal PWM:
I
I Fiara 1.9 Forma de la tensión de salida para una técnica P W M programado.

- ESQUEMAS TRADICIONALES
Para ejemplificar como se calculan 10s ángulos de conmutación se utilizará d a técnica que produce una tensión de salida bipolar, con simetría de cuarto de ciclo como se muestra en la figura 1.9. Los coeficientes de Fourier de la función P W M (Fig. 1.9) para esta técnica están dados por [4]:
bm = O
, I
donde: n = 1,3,5,7 ,..., cc N =Número de ángulos de conmutación. aN = hgulos de conmutación.
Si se desean eliminar N-1 armónicos (como 3, 5, 7, etc.) se debe resolver el siguiente sistema de ecuaciones no lineales con N incógnitas:
- - I .- cos a, ,: cos a2 + ..'. +(-I)"'cos a, cos 3a, - cos 3a, + ... +(-i)N+' cos 3a,
c, Aa, - cos Aa, + ~ T ~ ' ' Y o s A a , ~ .. . ~ . . . ~ ~ . . L . . . ~
(1.3) "1 O
. . donde: . A = 2 N - 1 . 7 . ,
- 1 u, = Magnitud de la componente fundamental.
Una vez calculados los ángulos de conmutación se programan en una memoria. Si se desea controlar la magnitud .de la tensión de salida, es necesario calcular para cada magnitud de la fundamental los ángulos de conmutación y utilizar bancos de memoria adicionales o bien seccionar la memoria. El control de la tensión.de salida se hace cada medio ciclo, cambiándose de banco de memoria. - -
! ?I
Como se puede observar, esta estrategia de control es muy lenta por .lo que distorsiones en tiempos muy cortos, como las provocadas por una carga no lineal, no
*- . . . podría compensarlas. 1 ~~
8

.- ESQUEMAS TRADICIONALES
Para ejemplifícar como se calculan los ángulos de conmutación se utilizará una técnica que produce una tensión de salida bipolar, con simetria de cuarto de ciclo como se muestra en la figura 1.9. Los coeficientes de Fourier de la función PWh4 (Fig. 1.9) para esta técnica están dados por 141:
be = O
donde: n = 1,3,5,7 ,..., N =Número de ángulos de conmutación. aN = h g u l o s de conmutación.
Si se desean eliminar N-1 armónicos (como 3, 5, 7, etc.) se debe resolver el siguiente sistema de ecuaciones no lineales con N incógnitas:
cos a, - cos a2 + ... COS aN cos 3a, - cos 3a2 + ... COS 3a,
~~ ~ ~. . .. . .. . . . . ~ . ... . . +(-T)"'COsAaN .. . l=l]' - o ~- (1.3) - -
- donde: A = 2 N - 1 a, = Magnitud de la componente fundamental.
Una vez calculados los ángulos de conmutación se programan en una memoria. Si se desea controlar Ia magnitud de la tensión de salida, es necesario calcular para cada magnitud de la fundamental los ángulos de conmutación y utilizar bancos de memoria adicionales o bien seccionar la memoria. El control de la tensión de salida se hace cada medio ciclo, cambiándose de banco de memoria.
Como se puede observar, esta estrategia de control es muy lenta por lo que distorsiones en tiempos muy cortos, como las provocadas por una carga no lineal, no podría compensarlas.
. .
8

L
ESQUEMAS TRADICIONALES
N E R S O R PI
pki%í senoidal.
El PWM senoidal, para generar los ángulos de conmutación, se basa en comparar una onda triangular (portadora) y una onda senoidal (referencia) (Fig. 1.10). Existen Vanantes dentro de esta técnica, ya sea cambiando la forma de la portadora o de la referencia [5,6].
Una variante es utilizar como portadora una señal triangular por partes denominada PWh4 senoidal modificado. La otra variante consiste en variar la forma de la señal de referencia sumándole componentes armónicos a la senoidal, a lo que se le denomina PWM senoidal con inyección de armónicos. Estas variantes permiten tener una mayor amplitud en la tensión de salida, o cancelar cierto número de armónicos más fácilmente.
2/ P
t"
Eigura-lAO Onda-triangular y senoidal-para generar el PWM - -
La regulación de la tensión de salida se hace tradicionalmente con un compensador PI, lo cual hace que el sistema tenga una respuesta lenta. Aunado a ello la tensión que se regula es un voltaje promedio o efectivo, con esto el sistema es aún más lento, ya que el cálculo de dicho voltaje también está basado en una integración (ver figura 1.11).
Referencia
I 1 1 vo I I l l I
de Vo u
Figura 1 . 1 1 Regulación de tensión del inversor utilizando un compensador PI,
9

v , ESQUEMAS TRADICIONALES
Dicho esquema pofia mejorar bastante su respuesta dinámica si la frecuencia de la portadora se incrementara, pero debido a que se utiliza un compensador PI y se regula u11 voltaje promedio o efectivo, resulta en un sistema con una dinámica muy pobre, por lo que las distorsiones causadas por una carga no lineal no pueden ser compensadas [2].
1.5 Solución propuesta Como se planteó anteriormente, los esquemas tradicionales de un S A i presentan,
entre otros, dos problemas importantes: uno en cuanto a eficiencia, y otro en cuanto a respuesta dinámica.
Para mejorar la eficiencia en los esquemas de inversores se propone utilizar una nueva topología de inversor: el inversor elevador [7]. Para mejorar la respuesta dinámica se propone utilizar una estrategia de control por modos deslizantes [8].
El inversor elevador.
Se propone utilizar el inversor elevador puesto que reduce significativamente el número de etapas con las que se realiza el proceso de inversión en un SA1 o SF, por lo que la eficiencia se mejora notablemente, ya que no se tienen dos o más etapas en cascada para realizar esta función. Otra ventaja adicional, debida a esta reducción de e t a p a s ; - e s - q u e - e l n ú m ~ r o ~ ~ ~ m ~ n t ~ e ~ d ~ y ~ l ~ - ~ ~ ~ i n u y e en ei costo. ' ~ - -
~ .- .
~ - . ~ ~~
I .. . .- ... . . . . . ~ . El inversor propuesto, mostrado en la figura 1.12, presenta muy buenas
características como son elevar e invertir tensión al mismo tiempo y en una sola etapa (un inversor tradicional no puede elevar tensión, sólo invertir). Siendo por esto posible la reducción en el número de etapas con las que se construye un SAI. o SF.
Carga
Figura 1.12 Inversor elevador.
10

- ESQUEh4AS TRADICIONALES
Este convertidor está formado por dos convertidores cdcd del tipo elevador bidireccionales en comente, ambos convertidores se operan de manera que produzcan una tensión senoidal montada en una componente de cd, las tensiones senoidales generadas por cada convertidor deben estar defasadas 180 grados una con respecto a la otra (Modo ii de operación, descrito en el capítulo 2), con el propósito de maximizar la excursión del voltaje de salida (Figura 1.13) [7].
Figura 1.13 Inversor elevador dos convertidores cd/cd elevadores
El control por modos deslizantes.
_ _ - Se-propone-una~~tt~i~dcontrólpormodos-ddeslizantes(ShiIC por sus siglas en inglés) por dos razones fundamentales: primero, se necesita una buena respuesta dinámica debido a que la carga típica del inversor es no lineal y provoca una distorsión en la tensión de salida del inversor, por io que la única solución es utilizar una estrategia de control que pexmita una mejor respuesta dinámica que las estrategias tradicionales. Segundo, el inversor elevador está compuesto por convertidores cd/cd elevadores que tienen un comportamiento no lineal, por io que sería adecuado un control apto para sistemas no lineales.
Adicionalmente, es conveniente hacer notar que un convertidor elevador tiene una estructura variable determinada por los dispositivos de conmutación; por io tanto un control por modos deslizantes, que está basado en la teoría de sistemas de esmictura variable, es propio y prometedor para este tipo de sistemas.
El control por modos deslizantes comparado con el control convencional tiene mejores características, ya que produce una mejor respuesta dinámica y estabilidad del sistema en lazo cerrado para variaciones gandes de carga y fuente[8-10].

- TEORÍA DE OPERACI~N Y ANÁLISIS TEÓRICO DE LA SOLUCI~N PROPUESTA
2.1 Introducción
~ En este capítulo se presenta la teoría de operación del convertidor propuesto. Se explica de dónde nace la idea del inversor elevador y se extrapola a otro tipo de topologías. Se presentan los modos de operación del inversor elevador y se obtiene el modelo del mismo, así como el funcionamiento de la estrategia de control por modos deslizantes y sus pasos de diseño.

TEORh DE OPERACIÓN Y ANkISIS TEÓRICO
reductores, se puede deducir la topología de un inversor elevador a partir de dos convertidores cdcd del tipo elevador.
2.1.2 El inversor elevador.
El inversor elevador, como su nombre lo indica, puede elevar e invertir tensión ai mismo tiempo, la capacidad de elevación se limita, al igual que un convertidor cdcd elevador [I 11, por sus elementos parásitos.
El inversor elevador se puede construir siguiendo los pasos mencionados en la sección anterior: primero, el convertidor cdcd elevador (en este caso) de un cuadrante (figura 2.6.a) se convierte en un converíidor bidireccional en comente (Fig. 2.6.b); segundo, se colocan ambos convertidores como lo muestra la figura 2.3, obteniéndose el circuito de la figura 2.7, en este caso dicho circuito no puede simplificarse, por lo que queda como lo muestra la figura 2.7.
~ " . -. ~ . . . .. .~ ~. . . .
Figura 2.6 Convertidor cdcd elevador, a) unidireccional, b) bidireccional en comente
Carga
Figura 2.7 Inversor elevador.
2.1.3 Exlensiones a otro lip0 de convertidores.
Como se vio anteriormente, un inversor se puede construir a partir de dos convertidores cdcd bidireccionales en comente. Se enfatizó en la construcción tantq del inversor tradicional como del inversor propuesto (el inversor elevador); pero dicha
I 15

-I.._ . I _ . i;
T E ~ R ~ A DE QPERACI~N Y ANALISIS ~ ~ ó i c o . ,
idea de construir un inversor se puede extrapolar a cualquier convertidor cdícd como lo puede ser el convertidor reductoríelevador, cuk, sepic y zeta [7].
En las figuras 2.8, 2.9, 2.10 y 2.11 se muestran las topologías de los inversores que se obtendrían con los convertidores cdcd respectivos, aplicando la misma idea de utilizar dos convertidores como lo muestra la figura 2.3. I
' Figura 2.8 Inversor derivado del convertidor cdkd reductor/elevador I
- Figura 2.9 Inversor derivado del convertidor cdkd cuk
L L
I Carga
Figura 2.10 Inversor derivado del convertidor cdcd sepic.
16

Los convertidores cdcd elevadores dentro del inversor elevador (Fig. 2.7), puesto que son bidirecciondes en comente, operan sólo en modo conducción continua (MCC). El convertidor cdcd elevador (Fig. 2.12) en MCC tiene las siguientes funciones de ganancia, utilizando el concepto de ciclo de irabajo (D) [ 1 1 1:
El ciclo de trabajo (D) se defme como el tiempo de encendido del interruptor (ton) entre tiempo de encendido más el tiempo de apagado ( ton + toff ). Si el convertidor es operado a una frecuencia constante, el periodo es ton + toff (Figura 2.13).
Figura 2.12 Convertidor cd/cd elevador
17

- TEORÍA DE OPERACIÓN Y ANALiSiS TE~RICO.
-1 : L i
__ -1 D -4 D’
C __ _- Vin ~ - I -- ,-
Señal para el interruptor
t
c : __ __
Figura 2.13 Señal de control para el interruptor.
La obtención de (2.1) y (2.2) supone una máxima transferencia de energía y que el sistema está en estado estacionario, además de que los interruptores son ideales. Para hacer uso de estas fórmulas se debe considerar una frecuencia de conmutación alta, para nuestro caso como se debe generar una tensión de salida con una frecuencia de 60Hz, la fiewencia de conmutación de los interruptores debe ser mucho mayor que esta fiecuencia.
El inversor elevador se puede operar de dos maneras: la primera es utilizar la misma señal de control para todos los interruptores, a esta forma la llamaremos modo I de operación; y la segunda es utilizar dos señales de control independientes, una para cada rama de interruptores, a la cual llamaré modo I1 de operación. A continuación se
- -describirá-cada-una de-ellas.
2.2. I Modo I de operación.
Esta forma de operación utiliza una señal de control que sirve de base para generar las señales de encendido y apagado para los cuatro interruptores. Para el análisis del convertidor se utilizan (2.1) y (2.2) que se basan en el concepto de ciclo de trabajo (D).
Convertidor B
, . Convertidor A
................................... ...................................
Figura 2.14 Inversor elevador operado en modo I.

---
-~ OR DE ÓPERACI~N Y ANALISIS T E ~ ~ U C O .
Sabiendo que e1 inversor elevador esta constituido por dos convertidores cdcd elevadores, se toma este hecho para hacer su análisis. Un convertidor cd/cd se utiliza como base, considerando que éste tiene un ciclo de trabajo D; el otro convertidor se opera con un ciclo de trabajo D’= 1 - D ( Fig. 2.14 ).
La tensión de salida del inversor es la diferencia de los voltajes generados por cada convertidor cd/cd elevador de donde se puede obtener la función de ganancia entradakaIida[7].
1 1- D D
Vin - -Vin 1 v, = va - vb = - V 0 - 2 0 - 1 --
Vin D ( 1 - D )
(2.3)
(2.4)
Grafícando esta función de ganancia se obtiene la gráfica de la figura 2.15. Como se puede apreciar este convertidor tiene ganancias superiores a la unidad, por lo que puede elevar e invertir al mismo tiempo.
. ..
Figura 2.15 Función de transferencia del inversor elevador modo I.
Como se puede ver en la figura 2.15, el convertidor tiene un comportamiento no lineal. Mientras se trabaje en la región cercana a D = 0.5 ,el sistema puede ser considerado como sistema lineal, puesto que esa región es casi lineal; haciendo esto, el análisis del convertidor se puede simplificar considerablemente.
Despejando de (2.4) el ciclo de trabajo se obtiene:
1 2 f l j 4 +( ;)* D=-- vo
2- Vin
2
19

c
i j TEorriA DE OPERACIÓN Y ANALISIS TEÓRICO.
Se requiere que la tensión de salida del inversor sea senoidai (Vo = Vop Sen(wr) ,
~
!
Fig. 2.16), por lo que para generar una tensión de salida de este tipo, el ciclo de trabajo es variable (función del tiempo).
voltaje da wlid. (VO)
Figura 2.16. Tensión de salida del inversor. I
Como se puede ver (2.5) tiene dos raíces, la raíz correspondiente al signo positivo no es válida puesto que resulta en ciclos de trabajo negativos (el ciclo de trabajo, por definición, debe ser siempre positivo), por lo que la raíz con un verdadero sentido fisico es la correspondiente.al signo negativo. De esta ecuación se define el ciclo de trabajo máximo (D- ) como:
(2.6) . . ~ . - 1 2-/=- . .
VOP Dma =---= - -
2- 2 Vin-- .--
~~
. -. .dónde: Vop = Valor pico de la tensión de salida.
.~
En (2.5) se puede ver que el ciclo de trabajo tiene una forma no lineal, pero si se opera en la región cercana a D = 0.5, como ya se mencionó, esta ecuación puede simplificarse, resultando que :
!
1 2
D = - + A , Sen(wt)
dónde: 1 A , = D -- 2 m m
De (2.2), (2.4) y sabiendo que Io = vp/R resulta que:
(2.7)
d
2 0 - 1 Vin ._ I, = D(1-D)’ R
dónde: R = Resistencia de carga.
20

-. .. ..
TEORh DE OPEUCIÓN Y ANAI.ISIS TEÓRICO
El valor pico de la comente en el inductor (I, ) se obtiene sustituyéndole el ciclo de trabajo máximo:
2D,,-i Vin Iu = .- D-(l-D-)’ R
D e (2.1) se puede obtener el valor pico máximo de la tensión en uno de los capacitores si se le sustituye el ciclo de trabajo máximo:
Vin 1 vap =
1- o,, (2.10)
De (2.1) y junto con la ecuación del ciclo de trabajo (2.7) se puede obtener la forma de la tensión en los capacitores, de (2.7) y (2.8) se puede obtener la forma de la comente en el inductor para este modo de operación. Ambas formas de onda son en estado estacionario.
En la figura 2.17 se muestra la forma de la tensión en uno de los capacitores, en la figura 2.18 se muestra la forma de la comente en el inductor, ambos en el modo I de
_c_._I_-I- - - ---- - - - operación. <- .
o! O 0.01 0.02 O b 3 ‘
Figura 2.17 Tensión en un capacitor (modo I de operación. )
O 0.01 0.02 0.93
Figura 2.18 Comente en el inductor (modo I de operación. )
21

- DE OPERACI~N Y ANÁLISIS TE~RICO.
I 2.2.2 Modo ZZ de operación.
I Esta forma de operación utiliza dos señales de control para los cuatro
intemptores, una para cada rama. Al igual que en el modo I de operación para el análisis del convertidor se utilizan (2.1) y (2.2) que se basan en el concepto de ciclo de trabajo (D), y consideran a los intemptores ideaIes.
Cada convertidor cdcd del inversor elevador es controlado de manera independiente, considerando al otro convertidor como una fuente de voltaje, la señal de control debe ser tal que el voltaje de salida sea una tensión senoidal ( 60 hz ) montada en una componente continua denominada Vdc (Fig. 2.19).
VcñajccneiCdpadtor(Va) 'T
. . .- -
A I
VaP
I _. 0.02 , -. 0.03
.... < _ . . Figura -2,19--Tensión-deseada en el capacitor (modo-11-de opem5on). . . ~~ .~~ ~
Aun cuando los controles trabajan independientemente, la tensión de salida que produzcan debe tener un defasamiento de 180' en la componente senoidal, con el propósito de maximizar la tensión de salida. . .
Un convertidor cdcd elevador no puede generar tensiones inferiores al voltaje .de entrada (Vin), es por ello que en este modo de operación se debe tener cuidado para escoger Vdc. Este valor debe ser escogido de manera que permita generar la tensión de salida. Para ello se define una ganancia máxima como:
dónde: Vop = Valor pico de la tensión de salida
(2.11)
Con este ecuación se define el valor de Vdc:
(2.12)
22

E O R h DE OPERACIdN Y ANALISIS TE6RICO.
La tensión de salida del inversor, ya que la tensión senoidal de cada capacitor está defasada 180' y la componente continua es la misma, es el doble de la tensión senoidal de uno de los convertidores cdícd elevadores sin la componente de continua. Por lo tanto, la función de transferencia entraddsalida para este modo de operación, junto con (2.1) y (2.12), se obtiene como:
(2.13) 2 vm 1-D
V, = 2 Va - 2 Vdc=- - 2 Vm - G m Vm
- _ vo 2 2- Gm Vin 1-D
(2.14)
La figura 2.20 muestra la gráfica de la función de transferencia entradaísalida contra el ciclo de trabajo; se puede observar, a diferencia de la otra forma de operación, que se limita la capacidad de elevación, la cual depende del valor de la componente continua con que se diseñe.
. -..I-. - . . __
. ~~
D . .- 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Figura 2.20 Función de transferencia (modo 11)
Por definición, del modo I1 de operación, la tensión en uno de los capacitores es:
VOP Va = Vdc + - sen (o t ) 2
A partir de (2. I) y (2.15) se puede obtener la forma del ciclo de trabajo:
Vin
Vdc + - sen (ai) D = 1-
2 De aquí, el ciclo de trabajo máximo es:
~~
(2.15)
(2.16) r

T E O ~ DE OPZXACIÓN Y ANALISIS TEÓRICO.
Utilizando (2.2), (2.14) y sabiendo que lo = vp/R resulta que:
2 D - G m ( l - D ) Vin ZL = .- (1 - D)' R
R = Resistencia de carga. donde:
(2.18)
El valor pico de la comente en el inductor se obtiene sustituyéndole el ciclo de trabajo máximo:
2D,, - Gm (1 - D-) Vin I , = .- (1 - Dm)* R '(2.19)
De (2.15) se puede obtener el valor pico máximo de la tensión en uno de los capacitores:
z - (2.20)
En la figura 2.19 se mostró la forma de la tensión en uno de los capacitores, en la figura 2.21 se muestra la forma de la comente en el inductor para el modo 11 de operación que se obtiene de (2. 18) y (2.16).
__
O o o1 O 0 2 Ob3 '
Figura 2.21 Comente en el inductor (modo I1 de operación. )
El presente análisis defme, para cada modo de operación, la evolución de la tensión en el capacitor y la comente en el inductor en estado estacionario. Dicho análisis, como se verá en el capítulo 3, sirve para determinar los valores de capacitancia (C) e inductancia (L) del convertidor, así como también para dimensionar los interruptores y diseñar los inductores.
24

TEOlÚA DE OPERACIbN Y khrALISiS TEÓRICO.
2.3 Modelo del inversor elevador
El inversor evador se modeló pensando en que se trabaja en el modo I1 de operación (en este odo de operación cada convertidor cdcd se controla de manera independiente) y baj la suposición de que uno de los convertidores cdcd elevadores del inversor elevado está funcionando correctamente y en estado estacionario, por lo que dicho convertido cdcd se sustituye por una fuente de tensión ideal; además se ha considerado a los temptores ideales. Con estas consideraciones el circuito del inversor se simpiific (Fig. 2.22), la fuente de tensión ideal (Vb) debe producir una
operación.
\ tensión senoidal mont 3 da en una componente de cd, según la d e f ~ c i ó n del modo I1 de
I R u=-1
\ I I
I - .. -Figura b.22 CifCiiifoSimplificado del inversor elevador. ____-=I - figura 2.22, el interruptor ( u ) defme dos eshucturas,
del interruptor (1 y -1). Como se puede ver el
. ..
Las ecuaciones del bistema asociadas a cada posición del interruptor son:
Parau=l: 2, = b
Parall=-1: 2, =¿I
donde 1 1 Vin Vb
' b = J ¿ ' R E ' w1=- RC
Las ecuaciones del sist ma en su forma matricial son: 1 - w o P XI [:I = [.),2 -w, I[ J + [ -;,* "f ][ x:) + [:I
(2.21) (2.22)
(2.23) (2.24)
(2.25)
25

r , TE0Rf.A DE OPERACI6N Y A N ~ I S I S T E ~ ~ J C O .
o bien x = Ax + BXU + c (2.26)
Como se puede apreciar en (2.26), el inversor elevador es un sistema no lineal, que posee una estructura variable por lo que utilizar estrategias de control tradicional (para sistemas lineales) no sería lo más adecuado. Además el inversor debe presentar buenas características de robustez y buena respuesta dinámica, como se describió en el capítulo 1, con el propósito de evitar que los equipo electrónicos (carga) operen incorrectamente. Por ello se propone utilizar un control por modos deslizantes que proporciona dichas características al inversor elevador; esta estrategia de control es apta para sistemas no lineales; además, su forma de operación está basada en la teona de estructura variable que es el tipo de estnictura que presenta el inversor elevador.
2.4 El control por modos deslizantes
El control por modos deslizantes permite que el sistema retroalimentado presente Características tales como robustez, buena respuesta dinámica, estabilidad ante variaciones grandes de la carga y de la fuente, entre otras. Una de sus desventajas es la complejidad de la teoría involucrada.
~ , . ~.
- .El control ‘por .modos deslihtes, a partir de la definición ‘de una superficie
denominada de deslizamiento “atrae” al sistema hacia eIlajJace-queelLsisterna peyma4e,-iGlíí;ll~do al sistema ai . punto . . .. . . . de operación deseado F a vez que se llega a la superficie definida. Para facilitar la comprensión del~fwiciona&ento se utilizará un
. ejemplo[ . . 81: ... .
. .. Sea el sistema: - -
Xi = x2 X2 = -a2 - bx, + U (2.27)
donde la ley de control u es de la forma: u=-1( /x , (2.28)
Se propone una superficie denominada superficie de deslizamiento:
- . -- (2.29) - s = CX, + x, = o
Para completar la ley de control se propone:
a x,S> O v = -a x,Sd O
(2.30)
26

- TEO& DE OPEPACI~N Y APJALISIS TC~RICO
El sistema definido presenta dos estructuras de acuerdo con la ley de control, una asociada con a y la otra con -a. Supongamos que el valor de a es tal que los planos de fase para cada situación son los que se muestran en las figuras 2.23 y 2.24.
Figura 2.23 Plano de fase para a Figura 2.24 Plano de fase para u
Como se puede observar en dichos planos, ambas estructuras conducen a sistemas inestables; sin embargo, el control por modos deslizantes tiene la capacidad de que, aunque las dos estructuras del sistema sean inestables, se puede garantizar estabilidad para el sistema combinado (el control por modos deslizantes se puede aplicar, no importando-el-tipo de-estnicturas, ya sean sistemas estables o inestables). -
La-ley-de control-permite-lograr estabilidad aun- cuando para-cada-estructl sistema no lo sea. El sistema estará cambiando de una estnictura a otra de manera que se llegue al punto de equilibrio, el sistema conmuta tomando en cuenta, en este caso, dos superficies, x, = O y S = O (superficie de deslizamiento).
El plano de fase asociado al movimiento con el control por modos deslizantes propuesto es el mostrado en la figura 2.25. En cualquier punto de operación en el que se encuentre el sistema, el control aplicará un estado tal que obligue al sistema a llegar y a permanecer en la superficie de deslizamiento, una vez ahí el sistema es llevado al punto de equilibrio, en este caso cero.
Figura 2 25 Plano de fase con el control SM
2 1
” . . ‘i.,; i. ,.., .
.i
TEOR~A DE QPERACIÓN Y ANALISIS TE~NCO.
Con base en el funcionamiento del control por modos deslizantes, los pasos de diseño pueden ser enlistados:
Obtener el modelo del sistema. Proponer una superíície de deslizamiento. Verificar la existencia del modo de deslizamiento. Verificar la estabilidad dentro de la superficie.
I
El modelo del sistema se obtuvo en la sección 2.3, por lo que sólo se desarrollan los úitimos tres puntos.
2.4. I Supeflcie de deslizamiento.
La supeñicie de deslizamiento propuesta es una combinación lineal de las variables de estado y las referencias:
a=SX-SX,=SeX=O - (2.31)
S = [ s,
X = [x,
donde: 3 ] ; si y s, = constantes de diseño,
x2IT ; Y, yx, = variables de estado, T
. ~ ~~
X, = [x,, x2,] ; r,, y xz, = referencia de las variables de estado, .-.. . . . . . ~. eX=[ex, exZ IT= [x , - x , , x,-x2,1T. . ’ . ~ ~ . ” .. .- .-- -
~ ~~ .~ . ~
- En la teoría del control por modos deslizantes, Utkin [SI, se define una herramienta conocida como control equivalente (u,), esta herramienta es utilizada para conocer el comportamiento del sistema una vez que llega y permanece dentro de la superficie. El control equivalente es un “promedio” entre los valores de la ley de control real (sólo 1 y -I), dicho control no se implementa físicamente, es un “artificio” matemático que nos ayuda en el análisis.
El control equivalente puede ayudamos también para verificar la existencia del modo deslizante, dependiendo de como se defina la ley de control [12]. Con este propósito se propone una ley de control compuesta de dos términos, uno de éstos es el control equivalente:
1t = llep +- u, .. .- - ~.
donde: ueq = Conirol equivalenfe
UN = - s g n a
(2.32)
28

L”
TEOm 3E OPERACI6N Y A N h I S I S TE~R:CO.
El primer t é d o es válido sólo en la superficie de deslizamiento (u, ) y el segundo asegura la existencia del modo de deslizamiento, este término es la ley de control real con la que se implementa el controlador.
La ley de control propuesta, ecuación (2.32), se aplica para analizar la existencia del modo deslizante. Dicha ley sólo asegura la existencia del modo deslizante de manera locai, es decir que únicamente hay existencia del modo deslizante en los puntos que están en la fiontera de la superficie de deslizamiento.
De la ley de control propuesta (2.32), para analizar el comportamiento del sistema dentro de la superficie sólo se utiliza el control equivalente, dicha ley de control es válida cuando se está en la superficie deslizante, esto implica que o = O y por lo tauto ir =O. El conirol equivalente se obtiene de ir = O [8] , resuitando : ,
= - [ SBX] -’ [ SAX+SC-SX, ] (2.33)
I 2.4.2 Existencia del modo de deslizamiento.
Existen diversos métodos para comprobar la existencia del modo de deslizamiento [12-131, una de estas alternativas es satisfacer la condición:
Encontrando C? resulta: -
(2.35) -
& = S [ AX+BXu, +C - Xr ] +SBXu,
Sustituyendo (2.33) en (2.35) se elimina el primer término, resultando:
u = SBXu, (2.36)
Por lo tanto la condición que hay que cumplir para que haya existencia del modo deslizante, sustituyendo (2.36) en (2.34) se obtiene que:
oC?=SBX[ - ~ s g i i o ] ( O (2.37)
Pero como el término -u cgn O es siempre negativo, la condición se reduce a:
(2.38)
(2.39)
29 -

- TEOIÚA DE OPERACICIN Y ANALISIS TE~RICO.
2.4.3 Estabilidad dentro de la superficie de deslizamiento.
Para comprobar la estabilidad del sistema dentro de la superficie de deslizamiento se utiliza el control equivalente (ucg ) ecuación (2.33):
ttq=-[SBX]-’[SAX+SC-SX,] (2.40)
Ca condición SBX # O se debe satisfacer para evitar singularidades en el control equivalente.
Es importante notar que el control equivalente es un “promedio” entre los dos posibles valores del control real (1 y -1) por io que siempre el control equivalente estará entre 1 y -1, pero nunca tomará los valores 1 y -1.
1 > > -1 (2.41)
Para determinar la estabilidad dentro de la superficie se debe sustituir el control equivalente en el modelo del sistema, y hacer el análisis de estabilidad bajo esta condición. Este anáiisis no se hizo en el presente trabajo, debido a que al sustituir el control equivalente el sistema resultante es no lineal y bastante complicado de analizar, dicho estudio constituiría por sí solo un trabajo de tesis. En su lugar se hicieron extensas pruebas de simulación_y_expenmentaies..del inversor-controlado -por-modos
. . . . .. .~ . . ~ .. -- __- ~ - ~ ’ deslizantes, los cuales se describen en el capitulo 4. .. _ _ -~ . ~ . - . .. .. ~ - ~.
30
.. . .
. . ~. . . . . - . .. . ~ -. .~
. . .. ... . .~ - , . . . ~ ~~. - . . . .. ~ . .
~ ~ ~
-~ . . ~.
~ ~~ ASPECTOS CRÍTICOS ... DE DISEÑO .. . .
:. , .
3.1 Introducción
En este capítulo se presenta el diseño del convertidor propuesto, y el del controlador por modos deslizantes. Se explican los aspectos críticos de diseño en la
.física del controlador, mencionando las diferentes alternativas para su realización. implementación del prototipo de laboratorio, así como los aspectos . .. de implementación
31

ASPECTOS DE DISENO.
3.2 Especificaciones del Convertidor propuesto
Con el propósito de comprobar el funcionamiento del convertidor propuesto se diseñó un prototipo experimental con las siguientes especificaciones:
Tensión de saiida ( Vo ). Frecuencia de la tensión de salida. Tensión de enirada (Vin). Potencia de salida (Po). Frecuencia de conmutación máxima.
120Vac. 60Hz 48Vdc. 3OOWatts. 30KHz.
La tensión de salida debe ser igual a la que proporciona el suministro de energía, que es 120 Vac con una fiecuencia de 60 Hz. Se escogió una tensión de entrada de 48V ya que es un valor utilizado en los sistemas de alimentación inintenumpible, donde además se mostrará la capacidad de elevación del convertidor.
La frecuencia de conmutación de los interruptores se limitó a 30 Khz debido a que se utilizarán IGBT’s que operan a una ftecuencia de conmutación relativamente baja.
. . . , .. .
~ .~ , ~ ~ . , ~ - ~ ~ ~ .. ~ ~ ~ ~
.. ~. . . .~ .~~ .~
.- ~- ~~ ~ . ~ ~~ ~.~~ - 3.3 La etapa de-patencia . . .. .. ~. . ,~
. ~ ~ ~ ~ l ~ _ ~- ~. . ~ -~ -
Es importante realizar un buen diseño del inversor elevador ya que, de lo contrario, el convertidor puede tener una muy mala capacidad de elevación, así como una baja eficiencia. La pérdida de ambas Características se debe a la misma causa: pérdidas por elementos parásitos. Como ya se mencionó, el convertidor cdcd elevador tiene una limitante en elevación que se debe a los elementos parásitos del convertidor, por lo que se debe diseñar tratando de minimizar los efectos de los elementos parásitos.
El inversor elevador, como se vio en el capítulo anterior, puede ser operado en dos modos. A continuación se presenta el diseño del convertidor para cada modo de operación.
3.3. I Diseño para el modo I de operación. . - . .
El modo I de operación utiliza sólo una señal de control para todos los interruptores. En el capítulo 2 se obtuvieron las ecuacionec que describen el comportamiento del convertidor para este modo de operación.
32

ASFECTOS DE 9ISEÑO.
El ciclo de trabajo máximo para este modo de operación está determinado por (2.6):
1 2 - J4 + (2) O,=--
VOP 2- 2 Vin
El inversor elevador se diseñará con una tensión de salida de 120 Vac, esto significa una tensión pico (Vop) de aproximadamente 170 V. La tensión de entrada del convertidor será de 48 V. Por lo tanto:
O,, = 0.7918 = 0.8 I I Haciendo una aproximación según (2.7) se obtiene que la forma del ciclo de
trabajo está determinada por:
1 2
D=-+0 .3 S e n ( o r ) - (3.2)
La comente milxima del inductor está determinada por la ecuación 2.9 p-ara este - .. _-
- modo-de-operaciór
ZD,, - 1 Vin I , = .- D-(I-D-)’ R (3.3)
.
Por io tanto resulta que el valor máximo de la comente, sabiendo que la carga es R = Voz I Po, para una potencia Po de 300 W es:
I , = 18.75 Amp
La tensión máxima del capacitor está determinada por la ecuación 2.10:
Vin 1 vap = 1 - Dmm
~ -
Por io tanto resulta:
Y ¿ = 240 V
(3.4)
33

i "L"
ASPECTOS DE a~smó.
Para el cálculo del inductor se parte de la ecuación que describe SU comportamiento: -
Al Ai
L = -vL (3.5)
Analizando uno de los convertidores cdcd elevadores de los que está constituido el inversor elevador (Fig. 3.1), se puede ver que cuando el interruptor está encendido (ton) el voltaje aplicado ai inductor es Vin, por lo que para calcular L sólo falta definir el valor de rizo deseado en el inductor. ;--TI;; 4
Vin + - - -1. -
-
Figura 3.1 Convertidor cdícd elevador.
. . . . . - El rizo de comente se ___ escogió del 20 YO de la comente,.maxim.a_deljnductor..-Si- - ~. ~ se trasaja a una frecuencia constante el tiempo de encendido se puede sustituir por:. .
I ~~ ~ . . . . .
- . . donde: D., = Ciclo de trabajo máximo. fs = Frecuencia de conmutación.
Por lo tanto, utilizando (3.5) y (3.6) con un nzo del 20%, el valor de la inductancia se puede calcular con:
Sustituyendo, con una frecuencia de conmutación de 30Khz, resulta:
L = 341 .33pH = 3 4 0 , u H
34

c
ASPECTOS DE DISEÑO.
De igual manera que para el inductor, para el cálculo del capacitor se parte de la ecuación que describe su comportamiento:
Como se puede ver en la figura 3.1, cuando el interruptor está encendido (ton) y no conduce el diodo, la comente del capacitor es la comente de la carga (Io), por lo que para calcular C sólo falta defhir el valor de rizo deseado en el capacitor.
El rizo de tensión se escogió del 2 % de la tensión máxima del capacitor. Utilizando (3.6) y ( 3 . Q el valor de la capacitancia se puede calcular con:
C = D., IOP
fs (0.02 Vap) (3.9)
donde: 2Po lop = - = Comente pico de salida máxima. VOP
Sustituyendo, con una frecuencia de conmutación de 30Khz; resulta:
. ..
. ... - ~ ~ C =J%G~~~FL~!I~ F
3.3.2 Diseño para el modo II de operación. - ~ ..
~~ ~ . ~ ~ . ~ .~~ ~~ ~ .:- . . ~ ~. ~
~~ ~ . ..
El modo ii de operación utiliza dos señales de control, una para cada rama de interruptores. En el capítulo 2 se obtuvieron las ecuaciones que describen el comportamiento del convertidor para este modo de operación. Se debe definir la tensión continua denominada Vdc, ya que este valor define los valores de comente y tensión del convertidor. En el capítulo 2 se obtuvo la ecuación (2.12):
GmVin Vdci%+Vin= 1 1 i V i n
L L
donde: VOP Gm=- Vin
(3.10)
.- ~ . --
El inversor elevador se diseñará con una tensión de salida de 120 Vac, por lo tanto Vop es aproximadamente 170 V. La tensión de entrada del convertidor es 48 V Por lo tanto:
Vdc 2 133 V
35
ASPECTOS DE DISEÑO
El valor de Vdc es preferible que sea superior a 133V, ya que de lo contrario el diseño sena demasiado holgado, por lo que se escogerá Vdc = 150 V. Este incremento no se consideró en el análisis del capítulo 2, pero este aspecto de diseño se incluye fácilmente si se considera que:
Gm Vin 2
V ¿ = + Vin+ Holgura (3.11)
donde: H Vin Holgura = -
2 Como se puede ver en (3.11), el término H se puede incluir en Gm,
considerando que Gm' = Gm + H, por lo que las ecuaciones obtenidas en el capítulo 2 se pueden seguir utilizando, con un cambio muy pequeño, Gm' en vez de Gm.
El valor de Gm' se puede obtener con:
2(Vdc - Vin) Vin
Gm' = (3.12)
donde: Vdc= Es valor de Vdc que incluye la holgura.
Sustituyendo, Vdc=150 en la ecuación 3.12 se obtiene: . - . ~~ .~ ~~
~ . .~ . ~. ~ .. ~~.~ .. ~ ~~~ - . . . ~. ~ .~ ~~ ~ . ~ ~ ~ . .~ ..~ ~ ~ ~~
.~ .. .. .~ ~~- -. -. Gm' = 4.25
- El ciclo de trabajo máximo para esta forma de operación está determinado por
(2.17) del capítulo 2: -
Vin D-=i- VOP Vdc t -- a
(3.13)
L Por lo tanto:
. . . ._ D- = 0.7957 o 0.8
La comente máxima del inductor, para este modo de operación, está determinada por (2.19), pero se debe utilizar Gm':
2D,, - Gm' (1 - Dma) Vin zLp = .- (1 - Dma)2 R
(3.14)
36

- ASPECTOS DE DISEÑO. .
Por io tanto resulta que el valor máximo de la comente, sabiendo que la carga es R = Voz I Po, para una potencia Po de 300 W es:
I, = 18.75 Amp
La tensión máxima del capacitor está determinada por la ecuación (2.20):
Por io tanto resulta:
Vap = 235 Y
(3.15)
El cálculo de la inductancia y la capacitancia se hace con (3.7) y (3.9) previamente obtenidas para el modo I de operación, resultando para una fiecuencia de conmutación de 30Khz:
L = 341.33,uH = 3 4 0 p H , y -
~. . ~. c = 20.02pF FJ 22pF . .
-El diseño para ambos modos de operación hasta ahora ha considerado un análisis tradicional para la etapa de potencia, es decir una frecuencia de conmutación constante; pero el control por modos deslizantes opera de manera natural a frecuencia variable. Una vez que se aborde la etapa de control se dará un ejemplo de diseño tomando en cuenta el controlador utilizado.
. . . ~ ~
. . ~ . ~.
. ..
- ". -~
3.3.3 Aspectos a considerar en el diseño del inductor y capacitor
La construcción del inductor y la selección del capacitor se vuelven puntos críticos en el diseño del inversor elevador, ya que de ellos depende que el inversor tenga una buena capacidad de elevación y una alta eficiencia. La construcción del inductor debe hacerse preferentemente con varios hilos con el propósito de reducir la resistencia sene equivalente. El capacitor se debe seleccionar con una resistencia sene equivalente baja o bien utilizar varios de menor capacidad en paralelo con el fin de reducir la misma. ~ - ~ ~-
37

3.4. El controlador por modos
L
ASPECTOS DE DISEÑG
deslizantes
. . . . .. . .. ... .. - ... . .
' . ~
.~ ~.
Donde u es la ley de control y establece cuando el interruptor está encendido o apagado. Se propuso una superficie de deslizamiento lineal:
. ~. ~. - .cr=SX-SXr = (3.17)
Los parámetros del controlador se definen en esta superficie y son s, y s2 , los
Los pasos de diseño que leterminan los valores de los parámetros del controlador son los dos últimos. Cod10 se vio en ei capítulo 2 (ecuación (2.39)), para
..
cuales muitipiican a ia corriente y tenlsión respectivamente.
que haya existencia del modo desliza te se debe cumplir la siguiente desigualdad.
En el capítulo anterior se este capítulo se hará énfasis en controlador. Los pasos de diseño son:
i) Obtener el modelo del U) Proponer una superficie
(3.18) -
enumeraron y se desarrollaron los pasos de diseño, en la obtención del valor de los parámetros del
sistema. de deslizamiento.
La tensión en el capacitor, repiesentada por la x2 siempre es positiva, ya que es la tensión de salida de un convertidor 'cd/cd elevador. Por ello, como primera condición para que haya existencia del modo dehzante SI debe ser positiva.
I
38

ASPECTOS DE DISEÑQ
La comente del inductor, representada por XI , puede ser tanto positiva como negativa (capítulo 2), por lo que para asegurar la existencia el término SI x2 debe ser mayor que el téxmino s2 xI . Por ello para asegurar la condición de existencia se puede hacer sI > s2 ; esto no es una condición obligada, ya que la condición de existencia (3.18) no sólo depende de s1 y s2 sino también de XI y x2, pero sí nos indica qué se debe hacer en caso de no cumplir la condición de existencia.
Para determinar los valores de SI y s2 se grafica la función:
(3.19)
Los valores de x1 y x2 están determinados por el modo de Operación, modo I1 en este caso. Se proponen valores a sI y s2 (tentativamente 1 y 1), si la función es positiva en todo momento, la condición de existencia del modo deslizante se cumple. En caso de que la función sea negativa en instantes, se debe incrementar s1 hasta que la función sea positiva con un cierto margen.
Para ejemplificar el procedimiento, se tomarán los valores de inductancia y capacitancia obtenidos en este capítulo para el modo I1 de operación, para la misma potencia de salida. De (2.15),y (2.18) se obtiene la forma de la tensión y comente:
. . ~. . . .
~ Vu.=Vdc.+.--sen VOP -(u 1)---- (-3,203- - ~ ~~ 2 .. -
.. ~
~ .. ~-
2 0 - G m ( 1 - D ) Vin . _ I , = (1 - D)’ R -
(3.21)
-
Como se vio en el capítulo anterior en la sección del modelado del inversor:
Proponiendo, primero s, = s2 = 1. Se obtiene la gráfica de la figura 3.2 para la funciónf; donde se puede apreciar que dicha función es positiva en todo momento, y por lo tanto hay existencia del modo deslizante. En la figura 3.3 también se graficó la tensión del capacitor, para ver como evoluciona la funciónfde acuerdo a la tensión de capacitor.
~ . -
39

ASPECTOS DE DISENO.
0.81
0.4:
0.6:
02-
4.2
0 . 4 O 0.01 0.02 O b 3
Figura 3.2 Gráfica de la función f con SI = s2 = 1
Y o O 0.01 0.02 0.03 ' -
Figura 3.3 Tensión del capacitor.
Para mostrar el efecto de la pérdida de existencia del modo deslizante, s, se hará igual a 0.2. En la figura 3.4 se aprecia que la función f se vuelve negativa en algunos intervalos, por lo que ya no hay existencia del modo deslizante en esos instantes. Como se aprecia en las figuras 3.3 y 3.4, la existencia se pierde cuando la tensión del capacitor es mayor.
-
Por lo tanto un valor adecuado para los parámetros del controlador son s, = s2 = 1. Se puede utilizar un valor mas pequeño para SI sin que se pierda la existencia, pero el modelo de ecuaciones obtenido en el capítulo 2 no toma en cuenta los elementos
40

ASPECTOS DE DISENO.
parásitos, por lo que el diseño debe estar holgado para evitar que se pierda la condición de existencia.
El valor de los parámetros, que están en el limite de la condición de existencia, se puede calcular con la fórmula:
(3.22)
donde: XiP = I L P A x2,, = VapJc
Se supone sI igual a 1 y se puede encontrarel valor de SI para el cual se está al borde de no cumplir la condición de existencia. Haciendo esto, para este caso resulta que s, = 0.3136.
Nose hizo un análisis formal de la estabilidad dentro de la superficie de deslizamiento en el desarrollo de la tesis, pero para asegurar estabilidad y obtener la forma de tensión deseada en el capacitor, los.valores de los parámetros SI y s2 deben ser ambos positivos.
! .~
.. ~~ ~ ~ _ _ .. ~:4~2-Implementmión-jTsica. . ~.
~ ~ . .. . . .~..-. . . ..
. . ~ ~. -.
El controlador por modos deslizantes se puede construir una vez definidos sus pa&metros. En la figura 3.5 se muestra el diagrama de bloques para la implementación fisica.
Figura 3.5 Diagrama de bloques del SMC.
41

ASPECTOS DE D:SEÑO.
En el caso del inversor elevador, que está constituido por dos convertidores cdcd elevadores y se trabaja con el modo ii de operación, se utilizan dos controladores, uno para cada convertidor cdcd. Como lo muestra la figura 3.5 se mide la comente del inductor ( ILI ), se compara con su referencia ( IL, ) y se multiplica con el parámetro del controlador comespondiente; de igual manera con la tensión del capacitor. Esta señal se suma para generar la superficie de deslizamiento según (3.17). Posteriormente la suma debe pasar por un bloque limitador de fiecuencia, ya que los interruptores no tienen una fiecuencia de conmutación infinita como io supone el análisis del controlador. Estos limitadores se explicarán posteriormente.
De un divisor detensión - vc
Vr
De un sensor de efecto hail - I1
Ilr
i - .
Figura 3.6 Generación de la superficie de deslizamiento.
----Para la medición de la tensión se utilizó un divisor de tensión resistivo, esta señal se debe comparar con h a referencia utilizando un amplificador operacional en configuración de restador, posteriormente se pasa por 'un amplificador. Para la medición de la comente se utiliza un sensor de efecto Hall, a ésta se le debe hacer el mismo proceso que a la tensión, para posteriormente sumar ambas señales y generar así la superficie de deslizamiento ts (Fig. 3.6).
3.4.3 Referencias.
La figura 3.6 muestra como se implementa fisicamente la superficie de deslizamiento, pero existe un inconveniente en dicho esquema: no es fácil generar físicamente la referencia de comente para utilizarla en el controlador. Como se vio en el capítulo 2, la comente del inductor en cualquiera de los modos de operación tiene una forma no convencional.
En [9] se'propone utilizar un filtro pasa altas para generar la señal de error de comente, es decir la resta entre la comente del inductor y su referencia, por lo que el diagrama de la figura 3.6 se cambia por la figura 3.7.
. . . .~
42

ASPECTOS DE DISEÑO.
detensi6n -vC De un divisor
De un sensor de efedohail -
- -
Figura 3.7 Diagrama para generar la superficie de deslizamiento con el filtro pasa altas.
El filtro que se utilizó es un filtro Butterworth de primer orden, la función de este filtro es eliminar las componentes de baja frecuencia y quedarse sólo con el rizo de alta frecuencia, de manera que se emule la resta entre la comente del inductor y su referencia
Es muy importante la selección de la frecuencia de corte de dicho filtro; ya que se deben eliminar las componentes de baja frecuencia y dejar pasar el rizo de alta f?ecuencia sin que se distorsione. Por lo que se debe escoger una frecuencia de corte relativamente alta, pero mucho menor que la frecuencia de conmutación.
. . ~ .
. . . . . . .~ . . .- - . ~~~ . . 3,4,4-Limitadores-defrecueneia. -. ~ ~~ . - . . . . . . . . .- .... . . . . ~~ . .~ ~ ....
ER los esquemas que utilizan un controlador por modos deslizantes, existen diversos métodos para limitar la frecuencia de conmutación [8,9,14], algunos de ellos
. . . son: ....... 1 / 1 . . . . . . , . ~~ -. ~ ~- .............. . . . 0 Utilizar un comparador con histéresisl ...
Hacer un retardo en la ley de control. Mantener un tiempo de encendido constante.
Comuarador con banda de histéresis.
Este método propone utilizar un comparador con una banda de histéresis. En la figura 3.8 se esquematiza como funciona esta idea. La ley de control (u) está determinada por la banda de histéresis delimitada por BH y BL, cuando la superficie de deslizamiento (o) denotada por la señal triangular pasa por encima de la banda (BH) la ley de control conmuta a -1; la ley de control cambiará nuevamente sólo cuando la función o pasa por debajo de la banda (BL).
Determinar la frecuencia de conmutación del convertidor tiene un cierto grado de incertidumbre, lo cual es una desventaja ya que pueden dañarse los interruptores. En
43

ASPECTOS DE DISEÑO.
estado estacionario se puede hacer un análisis para determinar la frecuencia de conmutación, dicho análisis es complicado. La frecuencia de conmutación se puede controlar con el ancho de la banda de histéresis.
A 0
Figura 3.8 Banda de histéresis.
Existen variantes de esta técnica que evitan que la ftecuencia de conmutación sea variable, lo que tiene la ventaja de poder eliminar fácilmente problemas de ruido e interferencia electromagnética [9,15,16].
I
~. Otra técnica para limitar la frecuencia de conmutación es retardar la ley de control (Fig. 3.9). Idealmente cuando la función de deslizamiento pasa por cero, la ley de control debe cambiar instantáneamente; esta técnica retarda un tiempo 6 el cambio de la ley de control. Cuando la función de deslizamiento se hace positiva la ley de control debe cambiar a -1 y cuando se hace negativa debe cambiar a 1.
O * W t
Figura 3.9 Retardo
44

c
ASPECTOS DE DISENO.
En esta técnica se ha planteado un análisis matemático para saber si hay existencia del modo deslizante y estabilidad [SI. No se ha hecho todavía un análisis para determinar la fkecuencia de conmutación, pero es obvio que ésta depende del tiempo de reíardo 6. Este análisis es igual de complicado que la técnica anterior.
Tiemoo de encendido constante. 1 Una técnica diferente a las anteriores consiste en mantener el tiempo de
encendido del interruptor constante (ley de control u=l). Cuando la función de deslizamiento cruza por cero haciéndose negativa, la ley de control cambia y se mantiene en ese estado un tiempo constante, la duración del tiempo de apagado se determina cuando la función vuelve a hacerse negativa (Fig. 3.10).
La frecuencia de conmutación está limitada por el tiempo de encendido y el análisis para determinar la fkecuencia de conmutación en estado estacionario se facilita considerablemente. Esta técnica es la que se implementó para el controlador por modos deslizantes.
-4 ton A-
u L
Figura 3.10 Tiempo de encendido constante
3.4.5 Diseño del inversor considerando al controlador (frecuencia variable).
En la sección 3.3 del presente capítulo se presentó la forma de calcular la inductancia y la capacitancia del inversor elevador considerando una frecuencia constante, pero como ya se mencionó el inversor elevador opera a frecuencia de conmutación variable, por lo que en esta sección se abordará la forma de diseñarlo considerando esta característica.
El controlador por modos deslizantes utilizará un limitador de frecuencia que mantiene un tiempo de encendido (ton) constante (descrito en la sección 3.4.4), de
45

ASPECTOS DE DISEÑO.
donde se parte para el diseño del inversor. También se tomarán los datos obtenidos en la sección 3.3.2 de este capítulo para el modo I1 de operación.
En la figura 3.11 se muestra la forma general de la ley de control (ciclo de trabajo), la fiecuencia de dicha señal es el inverso de su periodo:
1 f”=T (3.22)
Figura 3.1 1 Ley de control.
La fkecuencia máxima de operación para el convertidor es de 30 Khz, por lo tanto el periodo es:
. . ,~ ~
~~ .~ . --T=3333p~S . . . . ~
. .. . -. . . ~~ . ~ ~~
. . .
Como se vio, en estado estacionario el convertidor opera con un ciclo de trabajo máximo de 0.8 aproximadamente. El ciclo de trabajo máxüno permitido, para que el interruptor no se quede encendido, debe ser superior a 0.8; en este caso se propone 0.85 aunque no hay una regla para proponer ese valor,’sÓlo que debe ser superior al de estado estacionario.
De [i i] se sabe que el ciclo de trabajo es:
ton D = - T
(3.23)
Por lo tanto despejando y sustituyendo se obtiene que:
-~ . ~ . ~ ~ .. ~. ton = 2 8 3 3 ~ S ~~
Estableciendo este tiempo de encendido para el interruptor como constante, la frecuencia de conmutación en estado estacionario nunca excederá los 30 Khz; la inductancia y capaciíancia se deben calcular también con este tiempo.
46
ASPECTOS DE DISEÑO.
Retomando (3.5) y considerando un rizo del 20% de la comente se puede obtener que:
Vin L = - ton O.U,
(3.24)
. El valor de ILp que se obtuvo anteriormente es 18.75 y Vin=48. Por lo que resuita :
L = 362,uH
De (3.8) y considerando un rizo del 2% de la tensión se puede obtener que: I ton
C= IOP 0.02vap (3.25)
El valor de Vap que se obtuvo anteriormente es 235 e 1 0 ~ ~ 3 . 5 3 Por lo que resulta :
C = 2128.uF
. .~ ...... .. .- 3.S.Eljnv_eiso.r-elevadorcontrolado. por-modos .deslizantes ~. ~ .~ ~.
.. .- . . . .~ . . ~ .
~ ~~
Para realizar un diseño del inversor elevador utilizando un controlador por modos deslizantes es necesario primero conocer las especificaciones de potencia de salida, tensión de entrada, tensión de salida. Con estos datos se calculan los valores de -inductancia (L) y capacitancia (C) del inversor elevador (sección 3 . 4 3 , posteriormente se calculan los parámetros del controlador sI y s2 (sección 3.4. I).
Si se cambia alguna de las especificaciones, el valor de inductancia y capacitancia cambiará, y por lo tanto también hay que volver a encontrar los valores para los parámetros del controlador. Esto se debe a que al cambiar las especificaciones, el límite para cumplir la condición de existencia es distinto, debido a que las variables de estado (xi y xi) son dependientes de las especificaciones del convertidor.
Si se modificaron las especificaciones y ya no se cumple la condición de existencia, lo que se debe hacer es mantener a s2 constante e incrementar el valor de s, , haciendo esto se asegura que se cumpla la condición de existencia, pero el sistema se hace lento. Si a i cambiar las especificaciones se cumple la condición de existencia todavía el'sistema se puede tratar de hacer más rápido disminuyendo el valor s, , manteniendo a s2 constante.
47

- ASPECTOS DE DISEÑO
I
esta manera poder hacer el ajuste pertinente a s, , manteniendo a s2 constante.
incrementa Disminuye Existencia del Ajuste en Existencia del Ajuste en
modo deslizante SI modo deslizante SI
Se pierde Incrementar No se pierde Decrementar Potencia de Salida
Tensión de No se pierde Decrementar Se pierde incrementar entrada
Se pierde Incrementar No se pierde Decrementar Tensión de saiida *
* Al variar la tensión de saiida la condición de existencia pr;icticamente no se afecta (desprecihdose los elementos parásitos).
Tabla 3.1 Efectos en la existencia del modo deslizante al cambiar las especificaciqnes

r - . . .. :, . ??. <,,
RESULTADOS OBTENIDOS.
4.1 Introducción.
En este capítulo se presentan los resultados, tanto por simulación como experimentales, obtenidos en el desarrollo de la tesis. Se presentan simulaciones del sistema ante cambios de los parámetros de controlador y ante cambio de carga. Se presentan resultados experimentales del inversor elevador utilizando el controlador por modos deslizantes ante carga resistiva, cargas no lineales y cambio de carga. Se muestran también greficas de eficiencia y THD. Por Último se comparan los resultados obtenidos contra un esquema convencional
49

RESULTADOS OBTE?~DOS.
4.2 Prototipo desarrollado.
Con el propósito de comprobar el funcionamiento del convertidor propuesto se construyó un prototipo experimental con las siguientes especificaciones:
Tensión de salida ( Vo ). Frecuencia de la tensión de salida. Tensión de entrada (Vh). Potencia de salida (Po). Frecuencia de conmutación maxima.
12OVac. 6OHz 48Vdc. 3OOWatts. 3OKHz.
El diagrama del circuito que se implementó se muestra en la figura 4.1, y la lista del material que se utilizó se muestra en la tabla 4.1
Carga
~.
.. ..
Figura 4.1 Diagrama del circuito implementado
Tabla 4.1 Lista de componentes.
50

RESULTADOS OBTENIDOS.
4.3 Simulaciones del inversor elevador.
Con el propósito de comprobar y verificar el correcto funcionamiento del inversor elevador controlado por modos deslizantes se hicieron las simulaciones correspondientes. Las primeras se hicieron con el propósito de mostrar el funcionamiento del sistema ante un cambio de los parámetros del controlador (s, y s2 ), y una úitima simulación se hizo con el propósito de mostrar el comportamiento del sistema ante un cambio de carga.
El sistema retroalimentado fue simulado utilizando como parámetros del controlador s, = 4 y s2 = 1. En la figura 4.2 se puede ver como el sistema trata de seguir a la referencia de tensión, pero no la alcanza ya que el primero tiene una respuesta muy lenta. En el plano de fase asociado (Fig. 4.3) se observa como el sistema alcanza la superficie de deslizamiento y se mantiene dentro de ella.
Tensibn en el capacitor.
o 0.01 0.02 0.03
Figura 4.2 Tensión del capacitor con SI = 4 y s2 = 1. -~
Plano de fase. up1 I
.............._...
4.1 I , , e s 4s 4.5 4.4 4.1 42 4.1 o 0.1 0.2
Figura 4.3 Plano de fase con SI = 4 y s2 = 1.
El sistema fue simulado con los parámetros SI = 1 y s2 = 1, esta simulación se hace con el propósito de mostrar el comportamiento del sistema cuando s1 se hace más pequeña manteniendo constante s2. Como se puede ver en la figura 4.4 el sistema tiene una respuesta más rápida. En el plano de fase (Fig. 4.5) respectivo se puede ver que en
51

RESULTADOS OBTENIDOS.
el transitorio de arranque no se cumple la condición de existencia, pero el sistema se estabiliza.
Tensi6n en el capacitor. 254
O ! t 0.01 0.02 0.03 o ~~~.
Figura 4.4 Tensión del capacitor con s1 = 1 y s2 = 1.
. .
~- ~ - Figura 4.5 Plano de fase con SI = 1 y s2 = 1.
~ Otra simulación se hizo con los parámetros st =0.26 y s2 = I , donde ahora sI se hizo aún más pequeña manteniendo constante s2. En la figura 4.6 se puede apreciar como la tensión del capacitor se distorsiona en los momentos en que no se cumple la condición de existencia. En el piano de fase (Fig. 4.7) se puede apreciar claramente como ya no se cumple la condición de existencia del modo deslizante.
O ! t 0.02 0.03 O 0.01
Figura 4.6 Tensión del capacitor con SI = 0.26 y s2 = 1.
52

RESULTADOS OBTENIDOS.
plana de fare.
Figura 4.7 Plano de fase con s, = 0.26 y s2 = 1.
Con las tres simulaciones anteriores se puede llegar a una conclusión importante: existe un gran compromiso entre la rapidez del sistema y la condición de existencia del modo deslizante: es importante que se cumpla la condición de existencia pero no en demasía, ya que el sistema sería lento.
La fonna de la ley de control está cambiando entre los valores de 1 y -1, es decir se conmuta de una estructura a otra de acuerdo al modelo del inversor elevador. Para la segunda simulación (SI = 1 y s2 = 1) se muestra la forma de la ley de control en la figura 4.8. Se grafica nuevamente la tensión del capacitor, con el propósito de ver la - . evolución de la ley de control de acuerdo con dicha tensión. rngUraA.9)
_.
1'. t
Figura 4.8 Ley de control (u) con s, = 1 y s2 = 1. O 0.01 0.02 0.03
t O 0.01 0.02 0.03
Figura 4.9 Tensión del capacitor.
53

. RESULTADOS OBTENIDOS.
Es importante notar que la forma de la ley de control mostrada en la figura 4.8 todo el tiempo está conmutando. En algunas partes da la impresión de que no conmuta, pero esto se debe a que la frecuencia con la que está conmutando la ley de control es muy elevada en comparación con la fiecuencia de la tensión del capacitor (Figura 4.9), por lo que el paquete @cador no lo puede mostrar.
I
Para verificar la respuesta dinámica del convertidor se hizo una simulación con cambio de carga que muestra la rapidez y robustez del sistema ante este tipo de perturbaciones. La carga cambió de R=48 R a R=IOOO R y viceversa en los instantes t l y t2 respectivamente ( Fig. 4.10 ); para esta simulación los parámetros del controlador fueron s1 = 1 y sz = 1. Como se puede ver, el sistema tiene una buena respuesta dinámica.
I
Tensión en e l capador
-
~0 0.bl 0.82 O.&
. ~. .~ . .. . . . - . ~ ~
. . . . . .. . . .. . -~ ~~ ~~ . .. -
, ~~ .~ .. . __ -. . Figura 4.10 Simulación con cambio de carga. - . ~ ~ - - -
4.4 Resultados experimentales.
Con el propósito de comprobar y verificar el correcto funcionamiento del inversor elevador controlado por modos deslizantes se implementó un prototipo de laboratorio. Los primeros resultados experimentales que se muestran son tensión en el capacitor, comente en el inductor, tensión de salida, tensión y comente de entrada gráficas de THD y eficiencia. Por Último se muestran resultados del inversor ante carga no lineal y cambio de carga.
En las figuras 4.11 y 4.12 se muestran la tensión del capacitor y la comente del inductor obtenidas para una carga resistiva que demanda una potencia de 200 watts. Como se puede apreciar, la forma de onda coincide con lo obtenido en el capítulo 2: la tensión del capacitor (Fig. 4.11) es una tensión senoidal montada en una componente de cd y la cómente del inductor (Fig. 4.12) tiene una forma no convencional.
54

RESULTADOS OBTENIDOS. . .
- Figura 4.1 1 Voltaje en el capacitor, P0=200W.
Figura 4.12 Comente en el inductor, P0=200W ..
En la figura 4.13 se muestran la tensión y la comente de salida del convertidor ante la misma condición de carga. Se aprecia la forma senoidal de la tensión y comente de salida. La distorsión armónica total en este caso es de 1.1%
Figura 4.13 Tensión y comente de salida, P0=200W.
55

RESULTADOS OBTENIDOS.
I
I
I
!
.-
En la figura 4.14 se muestra la tensión y comente de entrada ante las mismas condiciones de carga. Se aprecia que la tensión de entrada es continua y la comente de entrada tiene una forma senoidal del doble de la frecuencia de la tensión de salida montada en una componente continua. Esto se debe a que la potencia de salida ( que es igual a la potencia de entrada ) es el producto de dos señales senoidales, es decir que la potencia de entrada del convertidor es un seno cuadrado y como la tensión de entrada es continua, entonces, por lo tanto, la comente es un seno cuadrado ( un seno cuadrado por identidades trigonométricas es una senoide del doble de la kecuencia más una componente continua ).
1- ISV/div 2- 3Aldiv
Ei~ra4.1.4_Tensión-y-comente.de.en~a~ ~ P ~ 2 0 0 W . . .. .
.~ ~ ~.~ ~ . .-
En la figura 4.15 se muestra la tensión de salida del convertidor sin carga. En i este caso la distorsión armónica total es de 0.7 YO. .~ I
~ . . . . . . . .
Figura 4.15 Tensión de salida sin carga.
En la figura 4.16 se muestra una gráfica de la distorsi6n armónica total (THD) contra potencia de salida, donde se puede apreciar como la distorsión annónica no supera el 2 %.
56

RESULTADOS OBTENIDOS.
; . . . , - . THD % . ... : ... . . 1 :
0 . 6 1 : : : : , 0.4 0.2
O o so 100 150 200 2JO 300
Potencia de salida Figura 4.16 Gráfica de THD contra potencia de saiida.
En la figura 4.17 se muestra una gráfica de eficiencia contra potencia de salida, donde se puede apreciar que el convertidor tiene una buena eficiencia: 90% a plena carga.
Eficiencia ( q ) 9s '1
! _. .* , .,.... . . . 1
- -~ Figura 4.17 Gráfica deeficiencia contra potencia de salida.
En la figura 4.18 y 4.19 se muestran los resultados del sistema ante carga no hea l . La primera figura muestra tensión y comente de salida del convertidor que demanda una potencia aparente de 144 VA con un factor de potencia de -0.62. La carga no h e a l consiste en un capacitor de llOpF, con un rizo de tensión del 30%, y una resistencia de 240Cl. En este caso la distorsión armónica total es de 3.12 %.
.- ~
/
i
Figura4.18 Tensión y comente de salida ante carga no lineal, Po= 144VA C=110 pF R=240 R.
57

RESULTADOS OBTENIDOS.
La figura 4.19 muestra tensión y comente de salida del convertidor ante una carga no lineal que demanda una potencia aparente de 133 VA con un factor de potencia de -0.67. La carga no lineal consiste en un capacitor de 220pF, con un rizo de tensión del is%, y una resistencia de 24022. En este caso la distorsión armónica total es de 3.61 %.
I
1- 85Vldiv 2- 3Aldiv 5msidiv
I Figura4.19 Tensión y comente de salida ante carga no lineal, Po= 133VA C=220 pF R=240 R.
En la figura 4.20 se muestran los resultados del sistema ante una cambio de
.y comente de salida del inversor, donde se puede apreciar el cambio de la carga (comente) y la distorsión ocasionada en la tensión de salida, la cual es muy pequeña.
~
~~ ~~ . - carga, la cual varió de 200 a lOOW - y viceversa. En ~ dicha f i g u r a - s e - m u e s t r a n l a s i ó ~ . .
~.
1 . ~ . . ~ . .. . . ~~ ~- -
Figura 4.20 Tensión y corriente de salida ante cambio de carga de P0=200W a Po=iOOW y viceversa.
En la figura 4.21 se puede apreciar el tiempo de recuperación del sistema ante el cambio de carga. El tiempo de recuperación para el cambio de carga de 200W a lOOW es de 760p y el tiempo de recuperación para el cambio de carga de IOOW a 200W es de 98Op.

i ! 1
. s
.
i
1 ... , ~
. .., .. .. , .
RESULTADOS OBTENIDOS.
, . . . . ’ ” ’ T’.
Figura 4.21 Tiempo de recuperación ante el cambio de carga.
4.5 Comparación del inversor con otros esquemas.
Con el propósito de comparar los resultados obtenidos con el inversor elevador controlado por modos deslizantes con las estrategias tradicionales, se acudió a los resultados obtenidos en i161.
. _I _____ . .. ~ ~ . . --- - ~ . -
_ _
I ~. - - . ~ ~,
I I
. ~~
- . - .~ . . .- . . ~ . . .
~ -. .~ ~ . . ~~
~~
En esa tesis se presenta resultados de un kvGsor tra&cion& utilizando una eshrategia de control PWM programado ante-carga no lineal. En la figura 4.22 se muestran dichos resultados, la carga no iined~demanda un potencia de 205Watts (el inversor estaba diseñado a IKW), donde obtuvo una distorsión armónica total del i 1%. ~~
, . ~- -- - . - . ~. - . ~~ . .
Figura 4.22 Tensión y comente de salida de un inversor tradicional ante carga no lineal.
Tesis de mestria desarrollada también en cenidet.
e i
i 1
I
I.
! I

. -
RESULTADOS OBTENIDOS.
En la figura 4.18 se muestran los resultados del inversor elevador controlado por modos deslizantes, que considera aproximadamente el mismo rizado de tensión para la carga no lineal que la de la figura 4.22. Los resultados de THD son mejores del 1 I% al 3.12%.
Por otra parte la eficiencia de la etapa de inversión realizada por dos etapas o más &e eficiencia del 80% o inferiores. Cada etapa puede tener una eficiencia muy buena *(go%), pero al estar en cascada ésta se reduce considerablemente, al contrario del inversor elevador, que tiene una sola etapa, donde la eficiencia no se reduce.
.. . . -
. - . . .. . -.

i j .-
CONCLUSIONES.
a tesis presentó una nueva topología de inversor (convertidor caca), con el L propósito de mejorar la eficiencia en aplicaciones como sistemas de alimentación inintexmmpible y sistemas fotovoltaicos. Los esquemas tradicionales poseen Vanas etapas en cascada por la que la eficiencia es pobre; el esquema propuesto reduce el número de etapas, por lo que no tan sólo la eficiencia se beneficia, sino también el costo.
El inversor propuesto es un inversor elevador que, a diferencia de los inversores tradicionales, puede además de invertir elevar tensión. Dicho esquema está constituido por dos convertidores cd/cd elevadores, lo que le da dicha característica. Se estudiaron sus formas de operación presentándose una metodología de diseño.
El inversor fue simulado e implementado experimentalmente, lo cual valida la idea de hacer la inversión y elevación en una sola etapa; el prototipo se alimentó con 48V para obtener una salida de 12OVac. El sistema tiene una buena eficiencia: 90% a plena carga que, comparada con las estrategias tradicionales que andan por debajo del SO%, es muy buena.
__ -
Así mismo se estudió una estrategia de c o n t r a 2 control por modKde*antes, que proporciona mejores características de respuesta dinámica y estabilidad del sistema retroalimentado ante Vanaciones grandes de carga que las estrategias de control tradicionales. E1 propósito de utilizar esta estrategia de control es poder suministrar una tensión de salida-senoidal con una mínima distorsión posible sin .importar el tipo de carga que se le presente.
La estrategia de control por modos deslizantes está basada en la teoría de estructura variable, por Io que lo hace aún más apto para los convertidores de electrónica de potencia que tienen estructuras variables determinadas por los interruptores (IGBT's). -
El controlador, junto con el inversor elevador, fue simulado e implementado experimentahente. Las simufaciones muestran el compromiso que hay entre la rapidez del sistema y la condición de existencia que se debe cumplir según la teoría del control por modos deskmtes.
El prototipo experimental se probó con carga no lineal, resultando una distorsión armónica baja (3.21), que a diferencia de las estrategias tradicionales que tiene un THD por encima del 5%, resulta ser muy buena.
61

La presente tesis dio lugar a varias publicaciones, entre ellas un artículo en el congreso más importante en electrónica de potencia a nivel internacional (IEEE Power Electronics Especialists Conference PESC’97) que fue celebrado en Saint Louis, Missouri en junio de 1997.
Es importante mencionar que la tesis forma parte de un proyecto de colaboración conjunta con la UFSC, Florianópolis, Brasil en donde se investigan también otry topologías que puedan elevar tensión e invertir al mismo tiempo.
Trabajos futuros.
Dentro de la misma línea de investigacibn existen aún ramas de estudio; la forma de consiruir el inversor elevador da origen a diversas topologías de inversores, por lo que estudiarlas y compararlas entre ellas sería de gran interés con el propósito de saber qué topología tiene las mejores prestaciones. Además la idea se puede extrapolar a sistemas trifásicos.
A todas las topologías se les puede implementar la misma estrategia de control con el propósito de homogeneizar la pruebas, así mismo se pueden estudiar oúas estrategias de control que permitan tener también buenas características de respuesta dinámica y estabilidad y hacer una comparación entre las diferentes estrategias de
.. -__ -. ._ c Aún no esta concretado ÜÜ&ílisisde estabilidad para el inversor elevador
controlado por modos deslizantes. Además se pueden utilizar diferentes superíícies de deslizamiento para tratar de obtener mejores resultados. Se puede operar ai convertidor en el modo I de operación y controlarlo por modos deslizantes, ya que sólo se modeló para el modo II de operación.
Se puede incluir en el convertidor conmutación suave, lo que hace que el sistema tenga una mayor eficiencia y que pueda ser operado a una frecuencia de conmutación mayor (este incremento en frecuencia se puede traducir en una mejor respuesta dinámica, además de disminuir el tamaño del convertidor ).
62

i !
Referencias. [I] Richard Redl, Andre S . Kislovski. “ Telecom Power Supplies And Power Quality”,
Proceedings of ZJJTUC’95. pp 13-21. [2] M. Carpita, M. Marchesoni, “Experimental Study of a Power Conditioning Using Sliding
Mode Control”, IEEE Transactions on Power Electronics, vol. 11 No. 5, Sept. 1996, pp.
[3] G. P. Hicks, A Review of AC UPS T&hnoIom (Final Report), Electrical Engineering Centre, July 1992.
[4] Prasad N. Enjeti, Phoivos D. Ziogas, James F. Lindsay. “Programed PWM Techniques.to ’ Eiiinate Harmonics: A Critical Evaluation”, ZEEE Transaction on Zndusw Applicatioh,
[5] Michael A. Boost, Phoivos D. Ziogas. “State-of-theArt Carrier PWM Techniques: A Critical Evaluation”. ZEEE Transaction on Zndusby AppIications, Vol. 24, ‘No. 2,
[6] S.C. Bansal, M.E. and U.M. Rao, M. Tech. “Evaluation of P.W.M. Inverter Schemes”. Proc. ZZX, Vol. 125, No. 4, April 1978, pp 328-334.
[7] Ramón O. Cáceres e Ivo Barbi. “Estudo De Urna Familia De Conversores%C-CA, Derivados Dos Conversores CC-CC Fundamentais”, Projeto de tese de doutorado, Florianapolis (SC) Brasil, Noviembre de 1995.
[8] V.1 Utkin, Sliding Modes And Their Auoíication In Variable Structure Svstems, MiR Publishers, Moscow, 1974.
[9] P. Mattavelli, L. Rossetto, G. Spiazzi, “General Purpose~Slidmg Mode Controller For - D d D c - C o n v e ~ ~ p ~ - ~ ~ ~ ; - Z E E E - ~ o w r ~ e c ~ o n ~ c s pecia isis Conference ,, - ~ ~~
1
731 - 742.
Vol. 26, NO. 2, Mmh /April 1990, pp 302-3 16. /
..... . M~cWApril 1988, pp 271-280.
I
Mode dc-to-dc Power Supplies”, Transaciions on Circuits And Sysiems, vol. 35 No. 10,~
[1 l]Mohan, Undeland, Robbins. Power Electronics: Converters: Applications and Desimi. Ed.
[12]R. A. DeCarlo, S. Zak, G. P. Matthews, ‘“Variable Structure Control of Nonlinear Multivariable Systems: A Tutorial”, Proceedings of the IEEE, vol. 76 No. 3, March 1988,
[13]J. Y. Hung, W. Gao, J. C. Hung, “Variable Structure Control: A Survey”, ZEEE Transactions on InchstriaalElectronics, vol. 40, No. 1, Feb. 1993, pp. 2 - 18.
[14]B. J. Cardoso, A F. Moreira, B.R.. Menezes, P.C .Cortizo. “Analysis of Switching Frequency Reduction Methods Applied to Sliding Mode Controlled DC-Dc Converters”. IEEE AppIiedPnver Electronics Conference and Exposition - APEC’92 . pp 403-410.
PWM Inverters”. ZEEE Power Electronics SpecialistsTonference -PEE ’93, pp. 623 - 629.
[ 161 Ciro A. Nuñez. “Análisis de Altemativas para la Implementación del Filtro de Potencia con Alta Eficiencia, Aplicado a Convertidores CDKA Utilizados en Sistemas de Alimentación no Convencionales”. Cenidet, Cuemavaca, México, febrero 1997 (Tesis de Maestría).
Oct. 1988, pp. 1291 - 1298. . . .
John Wiley & Sons, 1989.
pp. 212 - 232. i
~.
[ 151 J Fernando, Sonia S . Paulo. “ Fixed Frequency Sliding Mode Modulator for Current Mode . ..
63

APÉNDICE A. Circuitos esquemáticos.
El circuito esquemático de la etapa de potencia se muestra en la figura A. 1, los componentes se encuentran listados en la tabla A. 1.
Carga
Figura A 1 Diagrama de la etapa de potencia. L
~ _- .. .. ~
. . . -~.. .
~~~
Tabla A. 1 Lista de componentes.
El circuito esquemático del controlador por modos deslizantes se muestra en la figura A.2, los componentes se encuentran listados en la tabla A.2.
I
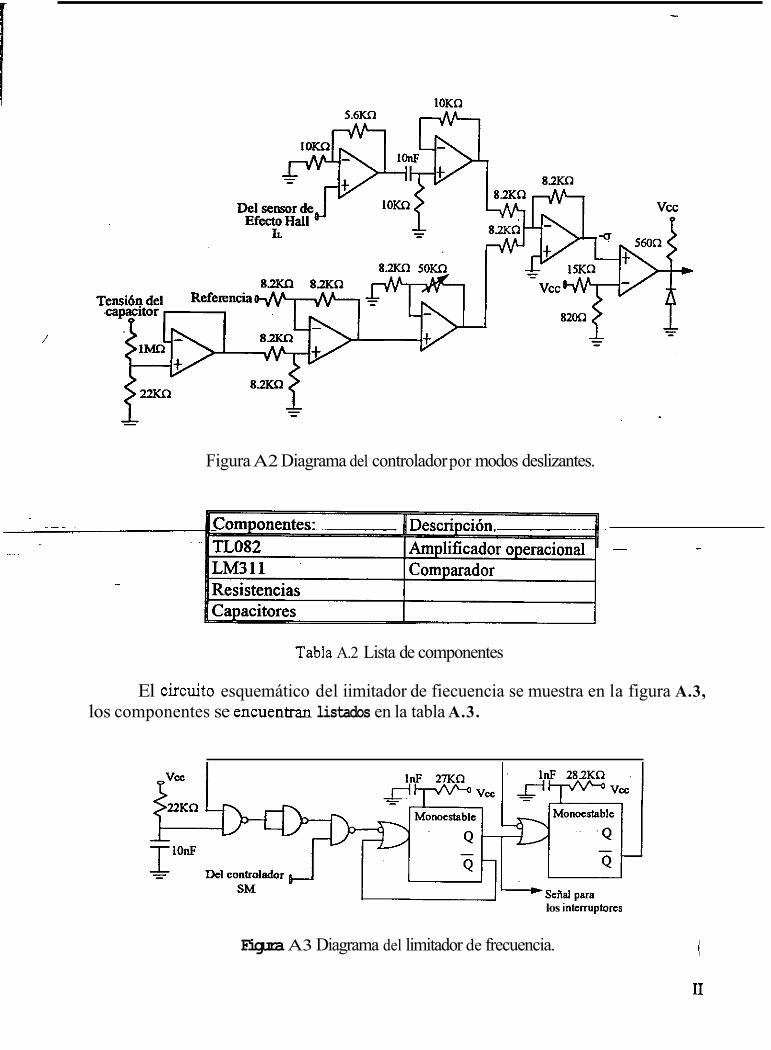
- i
Figura A2 Diagrama del controlador por modos deslizantes.
~ -
-
Tabla A.2 Lista de componentes
El circdo esquemático del iimitador de fiecuencia se muestra en la figura A.3, los componentes se encuenírau listados en la tabla A.3.
los intcrruptorcs
Figura A3 Diagrama del limitador de frecuencia. I/
I1

Tabla A.3 Lista de componentes.
I I11

.-
APÉNDICE B. Programas de simulación. El inversor elevador y el controlador fueron simulados en Simnon, que es un
paquete computational especial para simulación de sistemas no lineales. El paquete trabaja a través de módulos, por lo que se tiene un programa para cada módulo de la simulación.
Módulo del modelo del inversor:
i C0"üOUS SYSTEM INVER
" Inputs and outputs: I N P U T U
i
OUTPUT sxi sx2 n v c
" States, derivates and time: STATE x l x2 DER dxl dx2 TIMEt
" Equations: w=2*pi*f
w l=l/(R*C) b=Vin/sqrt(L) vdc=150 vb=vdc+(vo/2)*sin(w*t+pi) d=Vb/(R*sqrt(C))
dxl=-(wo*x2/2)+(wo*X)*u+b
wo=l/sqrt(L*C)
d x 2 = ( ~ 0 * ~ 1 / 2 ) - ~ 1 * X ~ - ( W O * X ~ / ~ ) * U + ~
sxl=xl SX2* n=Xi/sqrt(q Vc=Xz/sqrt(C)
IV
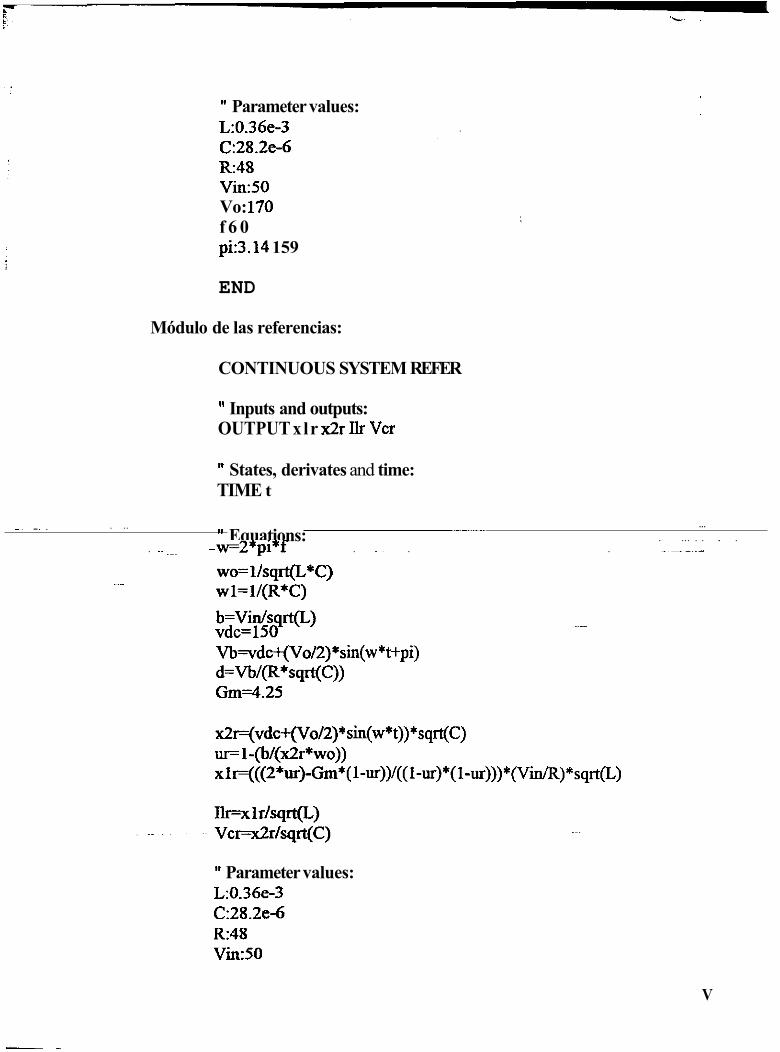
" Parameter values: L:0.36e-3 C:28.2e-6 R:48 Vin:50 Vo: 170 f 6 0 pk3.14 159
END
Módulo de las referencias:
CONTINUOUS SYSTEM REFER
" Inputs and outputs: OUTPUT xlr x2r Ilr Vcr
" States, derivates and time: TIME t
... -I__ ~~
" Equations: . . . . . . . .
wo=l/sqrt(L*C) wl=l/(R*C) b=Vin/sqrt(L) ~~
vdc=150 Vb=vdc+(Vo/2)* sin(w* t+pi) d=Vb/(R*sqrt(C)) Gm4.25
. .. ~~. . .- - ~ .~
. .__.1 ~ ~ . .. ~~~~ -w=2*pi*f . .~ .
x21=(vdc+(Vo/2)* sin(w*t))*sqrt(C) UI= i-(ó/(x2r*wo)) xll=(((2*ur)-Gm*( l-ur))/(( I-ur)*( I-ur)))*(VidR)*sqrt(L)
" Parameter values: L0.36e-3 C:28.2e-6 R:48 V k 5 0
V

V0=170 f60 pk3.14159
END
Módulo del controlador:
C0"üOUS STEM INVERC
" inputs and outputs: INPUT xl x2 xlr x2r OUTPUT uc sigma
" States, derivates and time: TIMEt
" Equations: exl=(xl-xlr) ex2=(x2-x2r) sigma= s 1 *(xi-xlr)+s2*(~2-x2r) uc=-sign(sigma) ~.
. . . .~
. . .~ ~. ..I ..
. .. . . . . ~~ ~ - ~~ .. . .
" Parameter values: s l : l s2: 1
-
END
Módulo del conector entre bloques:
CONNECTING SYSTEM INVECON
" Connections: xl[inverco]=sxl [inver] x2[inverco]=sx2[inver]
._ - x lr[inverco]=x lrrrefer] x2r[inverco]dr[refer] u[inver]=uc[inverco]
VI

Módulo "macro" (Corredor de la simulación):
MACRO INVERM
" Enter commands here: syst inver refer inverco invecon store Vc I1 Vcr iir ex1 ex2 error le-6 newplot
simu O 33.3e-3 switch color black area 1 1 axes h O 33.3e-3 v O 300 show Vc Vcr text 'Voltaje en el capacitor' area2 1 axes h -0.6 0.2 v -0.1 0.6 show exl(ex2) text 'Plano de fase'
split2 1
c
i w