catoms and claytonics: an approach to smart world
TRANSCRIPT

8/20/2019 CATOMS AND CLAYTONICS: AN APPROACH TO SMART WORLD
http://slidepdf.com/reader/full/catoms-and-claytonics-an-approach-to-smart-world 1/4
International Journal of Scientific Research Engineering & Technology (IJSRET)Volume 2 Issue 11 pp 724-727 February 2014 www.ijsret.org ISSN 2278 – 0882
IJSRET @ 2014
CATOMS AND CLAYTONICS: AN APPROACH
TO SMART WORLD
Jatin Chhabra
Student (B.Tech) Department of Computer Science and EngineeringDronacharya College of Engineering, Gurgaon-123506, India
Ravi Ahuja
Student (B.Tech 4th
sem) Department of Electronics and Computers EngineeringDronacharya College of Engineering, Gurgaon-123506, India
Aman Jain
Student (B.Tech 4th
sem) Department of Electronics and Computers EngineeringDronacharya College of Engineering, Gurgaon-123506, India
ABSTRACTThis paper reviews the worldwide increasing technology
of Claytronics which have overcome nanotechnology in
some fields. This technology produces very small nano
scale computers known as Catoms or Claytronics atoms.
In the current edition these catoms perform the basic
function such as color changing and performing
calculations using high power LEDs and LCD displays.
In the future edition, researchers are planning to
implement the technology of catoms to programmable
matter i.e. replicas of the surrounding matter in which
the basic building block that are catoms are programmed
in such a way that they can change their shape and size
according to the requirements. In order to achieve this
kind of complexity we have to discover some new type
of programming languages and not depend on the basic
ones i.e. C++ and Java, therefore the researchers at the
CMU developed two types of languages known as Meld
and Locally Distributed Predicates (LDP).
Keywords: programmable matter, catoms, claytronics,
LDP, Meld, nanotechnology.
1. INTRODUCTIONTill now almost all of us are familiar with the smart
phones. The phrase “smart” can be assigned to anyelectronic gadget if it can perform many functions at any
time and all these functions can be applied in a single,compact and easy to use device. Smart phone is a single
device that can act as a way of communication, a way
locator, a gaming parlor or even a music system. The
concept of being smart is now taken to a bigger level
which is now-a-days known as Smart Homes. The basic
or the smallest unit of a smart home is known as Catom(or Claytronics atom). The electronics which deals with
the manufacturing and application of the catoms is
known as Claytronics. By the use of Claytronics the
matter or the so called programmable matter can be
mould into any shape and size according to our
requirements. The properties of this kind of electronic
gadgets will match the properties of clay therefore the
name is given as “Claytronics”.
2. CATOMSDeveloped and named by Carnegie Mellon University
US by the two great minds of research Seth Goldstein
and Todd Mowry in June 2002, catoms is known to be
one of the best innovations in the history of electronics
and computers.
According to researchers at CMU “Programmable
matter” is described as:
“ An ensemble of material that contains sufficient loca
computation, actuation, storage, energy, sensing and
communication which can be programmed to form
interesting dynamic shapes and configurations.”[2]
In other words programmable matter is defined to be the
collection of those devices that can interact with other
through computers, sensors and communication so that
they can be transformed into different shapes and sizeThe technology that is used to design the programmable
matter from this tiny ‘catoms’ is known as“Claytronics”.

8/20/2019 CATOMS AND CLAYTONICS: AN APPROACH TO SMART WORLD
http://slidepdf.com/reader/full/catoms-and-claytonics-an-approach-to-smart-world 2/4
International Journal of Scientific Research Engineering & Technology (IJSRET)Volume 2 Issue 11 pp 724-727 February 2014 www.ijsret.org ISSN 2278 – 0882
IJSRET @ 2014
In the preliminary designs, each catoms is a self
contained unit that comprises of:
• A CPU.
• An energy store such as onboard battery.
•
A network device.• A video output device such as LCD or LED.
• Sensors like pressure sensors and photo sensors.
• A means of locomotion
• A mechanism for adhering to other catoms.
Figure 1: The side and top views of a partially assembled
Planar prototype Catom.
3. IMPLEMENTATION OF CATOMS:
3.1 BLINKY BLOCKSThe most realistic and practical application of Catoms
that have been developed today is the blinky blocks.
Though it is the most basic design in the field of
claytronics, it will surely lead the way towards the dream
future of the shape and size changing programmablematter.
A Blinky Blocks system is a modular distributed
execution environment composed of centimeter-size
blocks that are attached to each other using magnets.
Each block, roughly a 40mm cube, has sufficientprocessing, communication (serial link with up to 6
neighbors), and storage capabilities to implement a wide
variety of distributed tasks. Every block contains
powerful LEDs and various sensors like photo sensor or
pressure sensor. Color change is the basic operation itperforms along with several other capabilities such as
capturing and playing sounds and detecting impulses
such as shaking and tapping.
One of the prototypes of these blinky blocks could be as
follows:
There are four blocks connected magnetically each
having four LEDs and an infrared light sensor that can
sense the frequency of the incoming light. There is amicrocontroller which controls the working and the
function of these four blocks. Suppose there is a specific
pattern in which the LEDs are working say red, green
yellow and blue which is being programmed. There is a
switch on the first block which can alter the color of the
LED of the first block, such that if we switch the color
of the first block from red to yellow, the programmed
pattern allow the rest of the blocks to change color i.e
yellow, blue, red, green. The pressure sensor allows the
block to change colors by just tapping it.
4. NANOMETER SCALE CATOMSIn our basic design each catom is few millimeter in size
however to achieve the final destination of the replica
of human and real time object, the catoms need to be of
nanometer scale range or less like the atoms in the
surrounding matter. However manufacturing nanoscale
catoms is not an easy job to do, it needs immense as wel
as highly favorable conditions to handle these types of
tiny particles.
4.1 Manufacturing of the nanoscale catomsThese catoms consist of a tube that is fabricated as a
double layer planar structure in 2D using standard
techniques of photolithography and a high voltage self
contained CMOS device that is fabricated separately andthen manually wired bonded to the tube.
Figure 2: Motion generation in nanoscale catoms.
This CMOS device includes an AC-DC converter, a
storage capacitor, a simple logic unit, and output buffers
The catom moves on a power grid (the stator) tha
contains rails which carry high voltage AC signalsThrough capacitive coupling, an AC signal is generated
on the coupling electrodes of the tube, which is then
converted to DC power by the CMOS chip. The powered
chip then generates voltage on the actuation electrodes
8/20/2019 CATOMS AND CLAYTONICS: AN APPROACH TO SMART WORLD
http://slidepdf.com/reader/full/catoms-and-claytonics-an-approach-to-smart-world 3/4
International Journal of Scientific Research Engineering & Technology (IJSRET)Volume 2 Issue 11 pp 724-727 February 2014 www.ijsret.org ISSN 2278 – 0882
IJSRET @ 2014
sequentially, creating electric fields that push the tube
forward.
The difference in thermal stress created in the layers
during the fabrication processes causes the 2D structures
to bend into 3D tubes upon release from the substrate.The tubes have electrodes for power transfer and
actuation on the perimeter. [2]
5. TOWARDS THE FUTURE: SHAPE
CHANGING CATOMS
In the distant future, researchers tend to extend thetechnology of catoms to a higher level from color
changing to modifying its shape and size. This could be
done by the theory of crystal structure according towhich matter have definite shape and strength according
to their hybridization and inter atomic force between
their corresponding atoms.
Similarly in the case of catoms when the crystal of
catom is distorted or when corner most catom of a
particular replica experience some physical change then
atomic spacing between the corner-most catom and its
surrounding varies accordingly. This tends to the change
in atomic spacing of all the catoms in the programmable
matter. This movement of catoms along with the other is
done by electromagnetic force of attraction betweenthese catoms which is achieved by a series of ring
shaped electromagnets along the perimeter of the
cylindrical catoms.
It depends on two factors:
1. If the physical change on the corner catoms is unable
to affect the atomic spacing/ inter atomic force of the
surrounding catoms then your replica regain its
shape.
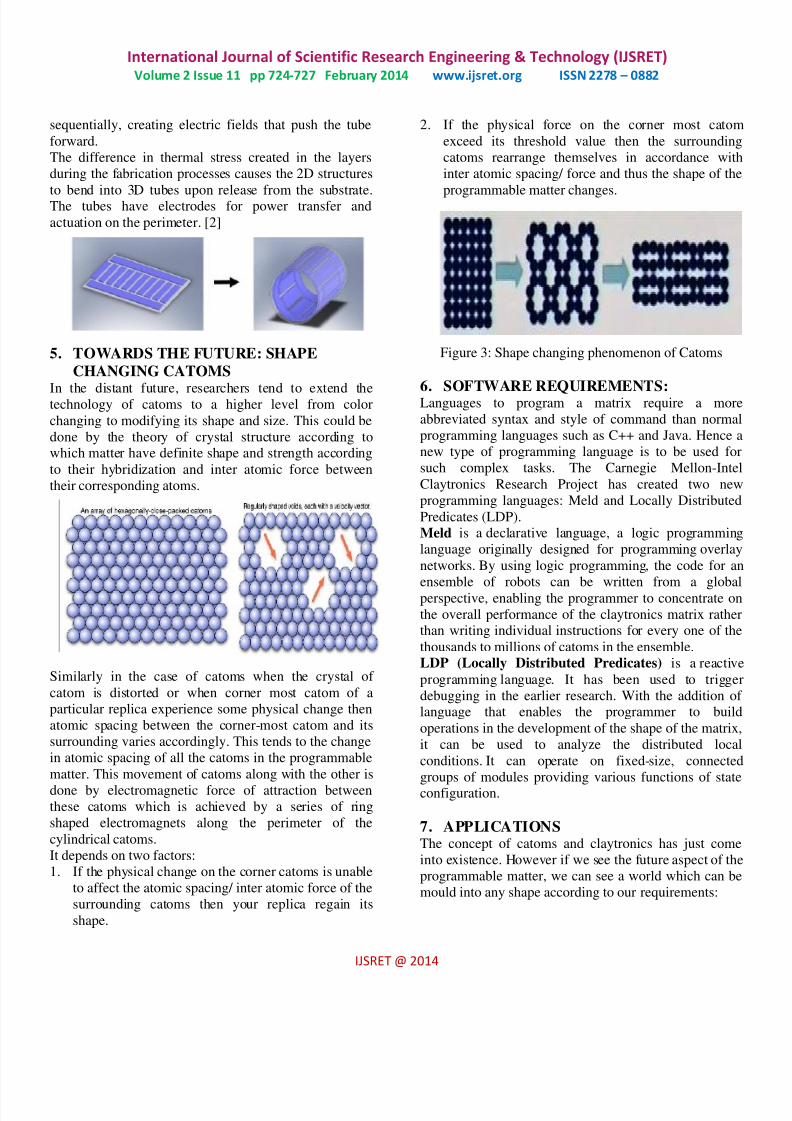
2. If the physical force on the corner most catom
exceed its threshold value then the surrounding
catoms rearrange themselves in accordance with
inter atomic spacing/ force and thus the shape of the
programmable matter changes.
Figure 3: Shape changing phenomenon of Catoms
6. SOFTWARE REQUIREMENTS:Languages to program a matrix require a more
abbreviated syntax and style of command than normal
programming languages such as C++ and Java. Hence a
new type of programming language is to be used for
such complex tasks. The Carnegie Mellon-Intel
Claytronics Research Project has created two new
programming languages: Meld and Locally Distributed
Predicates (LDP).
Meld is a declarative language, a logic programming
language originally designed for programming overlay
networks. By using logic programming, the code for an
ensemble of robots can be written from a global
perspective, enabling the programmer to concentrate on
the overall performance of the claytronics matrix ratherthan writing individual instructions for every one of the
thousands to millions of catoms in the ensemble.
LDP (Locally Distributed Predicates) is a reactive
programming language. It has been used to trigge
debugging in the earlier research. With the addition oflanguage that enables the programmer to build
operations in the development of the shape of the matrix
it can be used to analyze the distributed local
conditions. It can operate on fixed-size, connected
groups of modules providing various functions of stateconfiguration.
7. APPLICATIONSThe concept of catoms and claytronics has just come
into existence. However if we see the future aspect of the
programmable matter, we can see a world which can be
mould into any shape according to our requirements:

8/20/2019 CATOMS AND CLAYTONICS: AN APPROACH TO SMART WORLD
http://slidepdf.com/reader/full/catoms-and-claytonics-an-approach-to-smart-world 4/4
International Journal of Scientific Research Engineering & Technology (IJSRET)Volume 2 Issue 11 pp 724-727 February 2014 www.ijsret.org ISSN 2278 – 0882
IJSRET @ 2014
1. Dynamic Physical Rendering: When you use a
replica of a particular thing, after you finished of its
purpose you can transform into any other thing. In
this way, human life could become much easier with
a single thing that can perform the functions of manymore.
2. Medicine: A replica of your physician could appear
in your living room and perform an exam. The
virtual doctor would precisely mimic the shape,
appearance and movements of your “real” doctor,who is performing the actual work from a remote
office.
3. Disaster relief: Human replicas could serve as stand-
ins for medical personnel, firefighters, or disaster
relief workers. Objects made of programmable
matter could be used to perform hazardous work and
could morph into different shapes to serve multiple
purposes.
4. 3D Modeling: Using claytronics, you could reshape
or resize a model car or home with your hands. As
you manipulated the model directly, aided by
embedded software that’s similar to the drawingtools found in office software programs, the
appropriate computations would be carried out
automatically.
This process consists of three steps:
1. Capture 3D object
2. Encode 3D model
3. Transmit data
8. CONCLUSION:The technology around us is advancing very rapidly with
passing of time. From where we start we don’t evenknow how to manufacture things that we are using today
so easily to the time when we are able to make things
that can change or reconstruct themselves. This is just
the start to the distant future which our today’s science isdreaming of. On this way, the computers and electronics
technology will be of great use. Ever imagine a world
that is connected to each other on every corner or
connected to us. We would be able to communicate with
our house, our office and everything that we can think
of. This technology was initiated with the revolution ofnanotechnology, which may be overcome with the
technology in the distant future. Forget about Nanotech
think Claytronics.
REFERENCES[1] H. Abelson, et al. Amorphous Computing.
Communications of the ACM, 43(4):74 – 82, May 2000.
[2] Claytronics project website
http://www.cs.cmu.edu/claytronics/.
[3] M. Fromherz, et al. Distributed adaptive constrained
optimization for smart matter systems. InAAAI Spring
Symp. for Intelligent Dist. and Embedded Systems2002.
[4] M. Sitti, et al. Synthetic gecko foot-hair micro/nano-
structures as dry adhesives. Journal of Adhesion Science
and Technology, 17(8):1055 – 1074, 2003.
[5] D. Systems. http://www.3dsystems.com.
[6] M. Yim, et al. Polybot: a modular reconfigurablerobot. In Proc. of the IEEE Int. Conf. on Robotics and
Automation, pp. 514 – 520, April 2000.[7] "A Modular Robotic System Using Magnetic Force
Effectors," In Proceedings of the IEEE International
Conference on Intelligent Robots and Systems (IROS
'07), Kirby, Aksak, Campbell, Hoburg, Mowry, Pillai
Goldstein, October 2007.
[8] "Hierarchical Motion Planning for SelfreconfigurableModular Robots," In IEEE/RSJ International Confernce
on Intelligent Robots and Systems(IROS), Preeth
Srinivas Bhat, James Kuffner, Seth Copen Goldstein
and Siddhartha S. Srinivasa, October 2006.
[9] S. Murata, A. Kamimura, H. Kurokawa, E.i YoshidaK. Tomita, and S. Kokaji. Self-reconfigurable robots
Platforms for emerging functionality. In Lecture Notes
in Artificial Intelligence, volume 3139, pages 312 – 330
Springer-Verlag, 2004.
[10] W.-M. Shen, M. Krivokon, M. Rubenstein, C.HChiu, J.E., and J.B. Venkatesh. Multimode locomotion
via superbot reconfigurable robots, Autonomous Robots20(2):165 – 177, 2006.