car-mechatronics introduction to advanced driver ... summer school 2011 - advanced driver assistance...
TRANSCRIPT

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 1 -
CAR-Mechatronics
Introduction to Advanced Driver Assistance Systems
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 2 -
CAR-Mechatronics
Topics
Vehicle Stability Control (ESP)
Intersection Assistance

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 3 -
CAR-Mechatronics
Vehicle Stability Control - Necessity
ESP`99
Typischer Unfallablauf: Seitenkollision
Unfallbeteiligter: geringe Verletzungen
Unfallverursacher: tödliche Verletzungen
Unfallverursacher ist am Ende des Überholvorganges ins Schleuderngeraten
Unfallbeteiligter
Unfallstelle
Bild 13b
Loss of control after overtaking

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 4 -
CAR-Mechatronics
Vehicle Stability Control – Detection of unstable situation (1)
A
B
C
β
BewegungsrichtungFahrzeugschwerpunkt
Fahrzeuglängs-
achse
v y vF
v x
yaw-ratesteering-angle
slip-angle(should be < 5° !!!)
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 5 -
CAR-Mechatronics
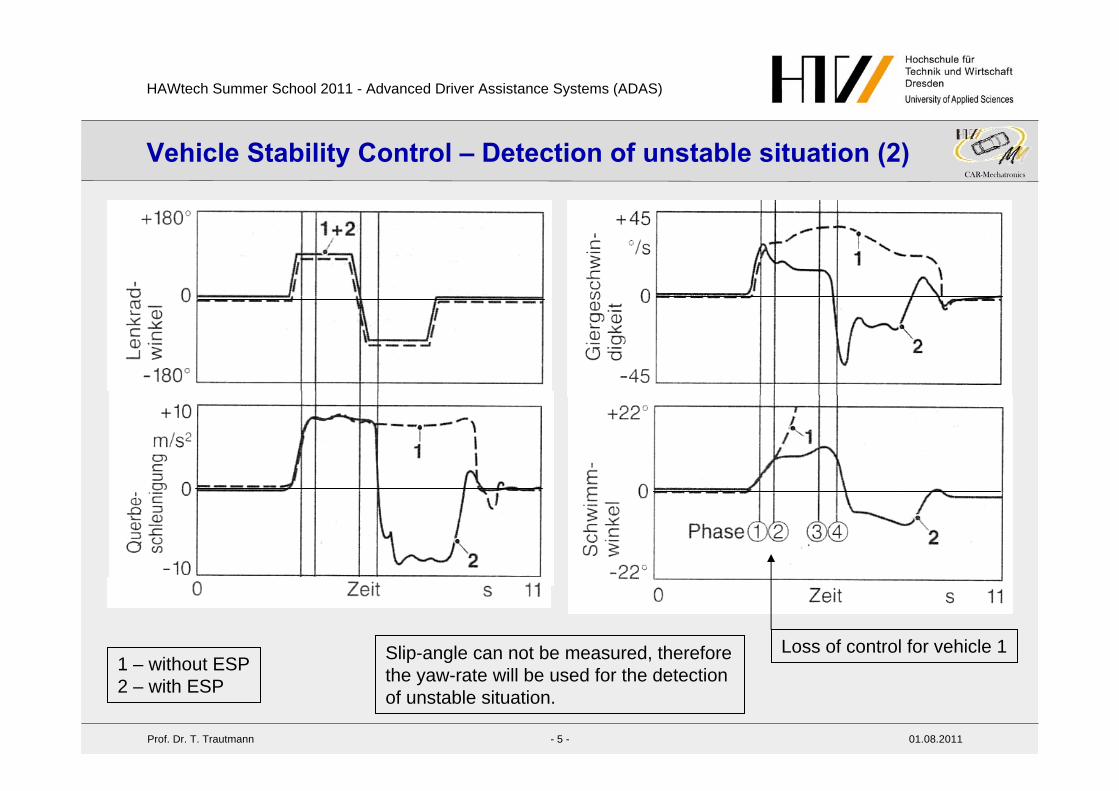
Vehicle Stability Control – Detection of unstable situation (2)
1 – without ESP2 – with ESP
Loss of control for vehicle 1Slip-angle can not be measured, thereforethe yaw-rate will be used for the detectionof unstable situation.
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 6 -
CAR-Mechatronics
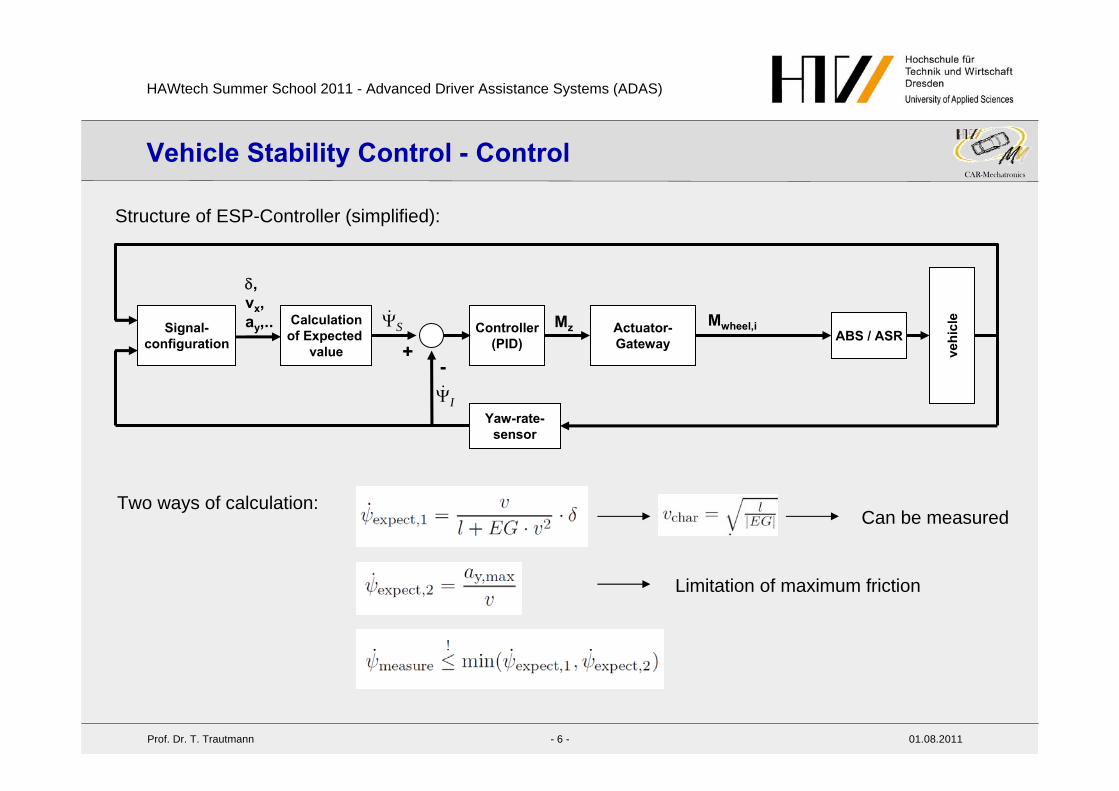
Vehicle Stability Control - Control
Controller(PID)+
-
Calculationof Expected
value
Actuator-Gateway ABS / ASR
vehi
cleMwheel,iMzSignal-
configuration
Yaw-rate-sensor
S
I
,vx,ay,..
Structure of ESP-Controller (simplified):
Two ways of calculation:Can be measured
Limitation of maximum friction

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 7 -
CAR-Mechatronics
Vehicle Stability Control – Calculation of yaw-rate
0 5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Fahrzeuggeschwindigkeit / m/s
Gie
rge
schw
indi
gke
it / 1
/s
Maximal mögliche Querbeschleunigung(Reibwertbegrenzung,Im Beispiel ay = 0.9g)
= 30°
= 60°
= 90°
ay = 0.3g
ay = 0.6g
ay = 1.0g
vchar at maximum yaw-rate

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 8 -
CAR-Mechatronics
Vehicle Stability Control - Elements
Drehzahlfühler
Lenkradwinkel-sensor Gierraten-
sensor
Hydraulikblock
Hydraulikaggregatmit Steuergerät
Steuergerät

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 9 -
CAR-Mechatronics
Vehicle Stability Control - Results

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 10 -
CAR-Mechatronics
Intersection Assistance - Necessity
Failure to yield the right of way is frequently involved. A key underlying cause is the complexity of the traffic situation and hence the substantial increase in the burden on the driver's attention at intersections.
Traffic signal and right-
of-way assistanceTurning and entering
assistance
Approximately 60 % of accidents in city traffic and 28% of all accidents occur at intersections.
Here, driver assistance systems capable of reducing the driver burden and providing timely hazard warnings offer a considerable potential for preventing accidents.

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 11 -
CAR-Mechatronics
Intersection Assistance - Example
Strehlener Straße
Fran
klin
stra
ße
source: EUSKA
Number and sortof accidents in year 2005 at an intersection in Dresden nearuniversity
Car-Motorbike
Car-CarCar-bicycle
Drink-driving

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 12 -
CAR-Mechatronics
Intersection Assistance – Basic principle
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 13 -
CAR-Mechatronics
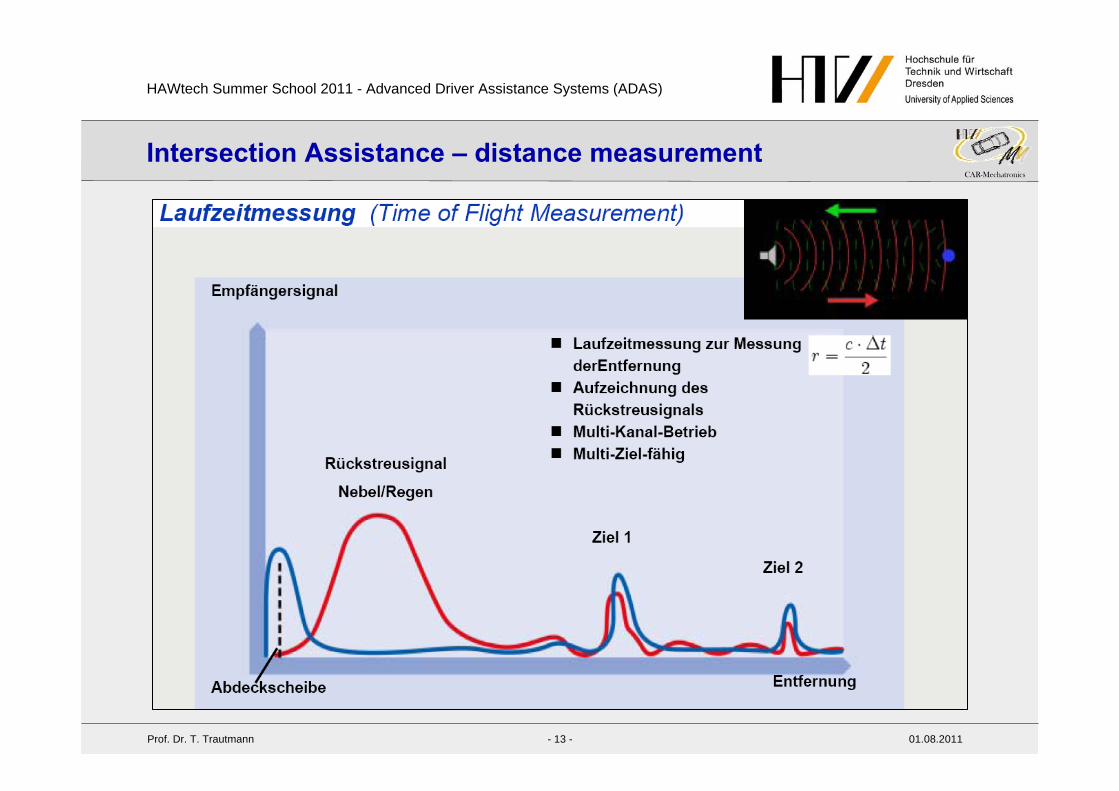
Intersection Assistance – distance measurement

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 14 -
CAR-Mechatronics
Intersection Assistance – Complexity of Situation
ca. 5s ca. 58 s

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 15 -
CAR-Mechatronics
Intersection Assistance – High-Resolution Scanner
Laserscanner
Fahrerkamera Außenkamera
Zentrale Messtechnik
Laserscanner
Fahrerkamera Außenkamera
Zentrale Messtechnik
ID 1
ID 3 ID
4ID 5 ID
6
ID 13
ID 7
ID 9ID
10ID 11
ID 15
ID 2
ID 8
ID 14
ID 12
ID 3
ID 16
ID 18
ID 17
ID 19
ID 20ID
21
ID 1
ID 3 ID
4ID 5 ID
6
ID 13
ID 7
ID 9ID
10ID 11
ID 15
ID 2
ID 8
ID 14
ID 12
ID 3
ID 16
ID 18
ID 17
ID 19
ID 20ID
21
1 measurement:
80ms240° field of view0,25° resolution2 objects per channel4 layers
>>> 7680 points @ 80ms>>> 96000 points @ 1s !!!
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 16 -
CAR-Mechatronics
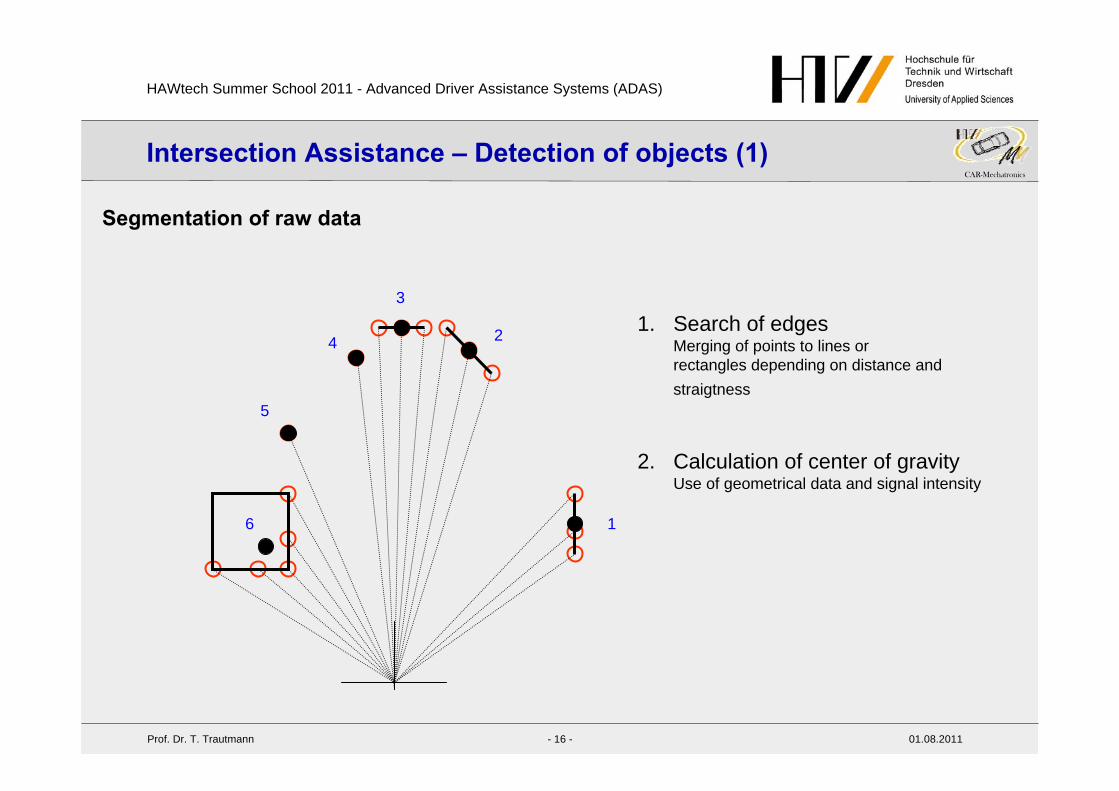
Intersection Assistance – Detection of objects (1)
1
2
3
4
5
6
Segmentation of raw data
1. Search of edgesMerging of points to lines orrectangles depending on distance and straigtness
2. Calculation of center of gravityUse of geometrical data and signal intensity

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 17 -
CAR-Mechatronics
Intersection Assistance – Detection of objects (2)
1. Segmentation
FusObj_new_Pos(40 x 8)
4.6.
SegDat(40 x 4)1.SensDat
(91 x 4)
(Dis0, Amp0) (Dis1, Amp1)
(x, y, Amp, Anz)
FusObj(40 x 8)
5.
SensDat_rest(40 x 4)
2.
new_Obj(40 x 8)3.
2. Assoziation of objects and segments
3. Find new objects4. Fusion and ordering of objects
5. Return of current objects and survive objects
6. Prediction
Parameters

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 18 -
CAR-Mechatronics
Intersection Assistance – Detection limits (1)
Rmin1 = B/2 / (tan(/2)) - v·(0.06s·Z)
Rmin2 = B/2 / (tan()) - v·(0.06s·Z) B
v
Rmin1
D = v*0.06s*Z

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 19 -
CAR-Mechatronics
Intersection Assistance – Detection limits (2)
Maximum possible speed for oncoming vehicles
0
10
20
30
40
50
60
70
80
90
100
110
120
130
0,8 1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3 3,2 3,4 3,6 3,8
Winkelauflösung [°]
max
. Ges
chw
indi
gkei
t [km
/h] LKW
PKW
Angle [°]
Vel
ocity
v [k
m/h
]
Detection time: 300 ms (5 cycles)
max. deceleration (truck, b = 2.55m): 5m/s²max. deceleration (passenger car, b = 1.8m): 8m/s²
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 20 -
CAR-Mechatronics
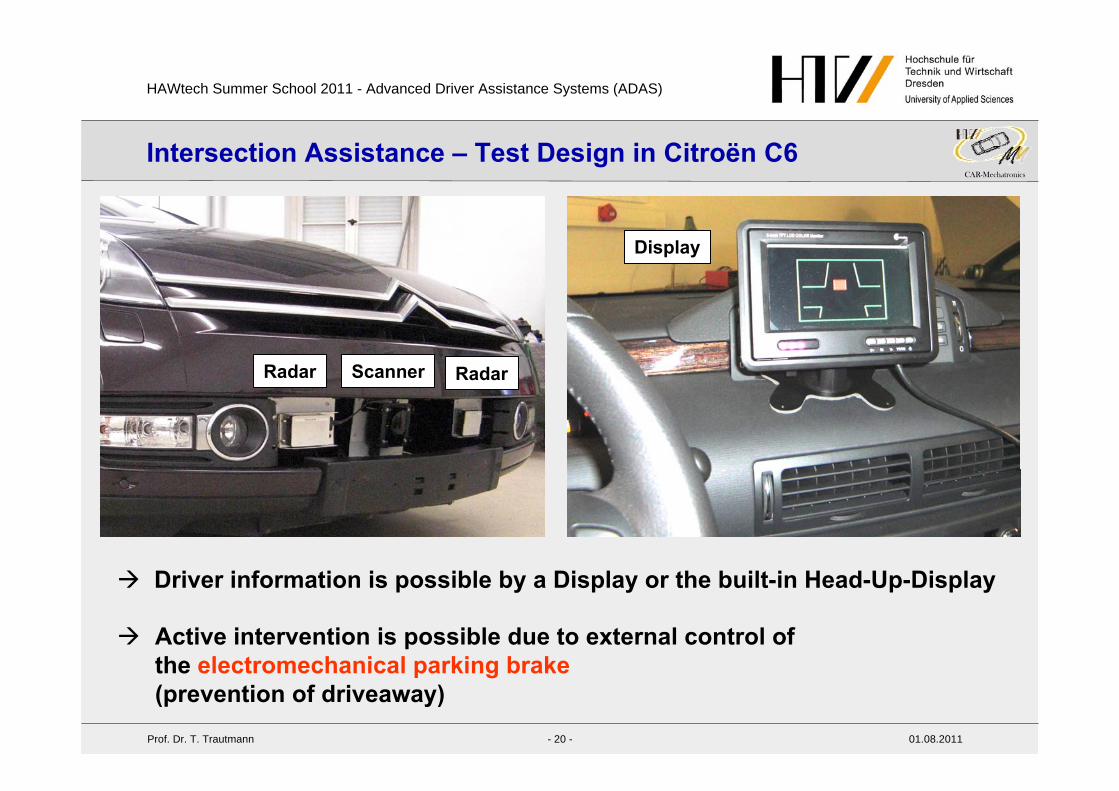
Intersection Assistance – Test Design in Citroën C6
Radar RadarScanner
Display
Driver information is possible by a Display or the built-in Head-Up-Display
Active intervention is possible due to external control of the electromechanical parking brake(prevention of driveaway)

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 21 -
CAR-Mechatronics
Intersection Assistance – Test Design in Citroën C6
P

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 22 -
CAR-Mechatronics
Intersection Assistance – Accident example (1)
source: EUSKA
source: GIDAS

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 23 -
CAR-Mechatronics
Intersection Assistance – Accident example (1)
two traffic signs
meanwhile traffic light installed

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 24 -
CAR-Mechatronics
Intersection Assistance – Accident example (1)
16,58m
Detection Distance:
Rmin = 21.8 m
Braking Distances:
s_br1 = 8.0 ms_br2 = 44.0 m
5,25m
Resolution Laserscanner: 3.6°
Driver-information too late – accident not avoidable
!

HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 25 -
CAR-Mechatronics
Intersection Assistance – Accident example (2)
36,16m
11,45m
Driver-information on time - accident avoidable
!
Resolution Laserscanner: 1.8°
Detection Distance:
Rmin = 48.6 m
Braking Distances:
s_br1 = 8.0 ms_br2 = 44.0 m
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 26 -
CAR-Mechatronics
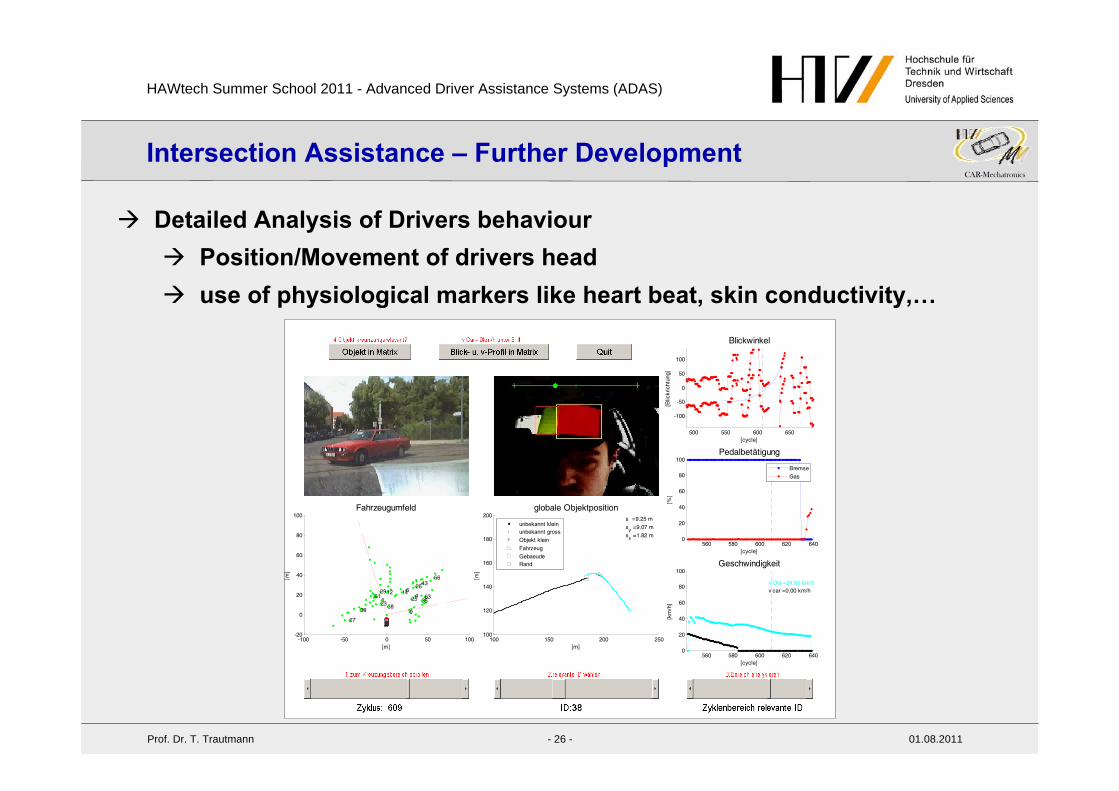
Intersection Assistance – Further Development
Detailed Analysis of Drivers behaviour Position/Movement of drivers head use of physiological markers like heart beat, skin conductivity,…
100 150 200 250100
120
140
160
180
200
[m]
[m]
globale Objektposition
sx =1.82 m
sy =9.07 m
s =9.25 munbekannt kleinunbekannt gross
Objekt klein
Fahrzeug
GebaeudeRand
-100 -50 0 50 100-20
0
20
40
60
80
100
[m]
[m]
Fahrzeugumfeld
12
234
389
6325
4326
61
56
27
6
1
29 14
39
35
560 580 600 620 6400
20
40
60
80
100
[cycle]
[%]
Pedalbetätigung
Bremse
Gas
560 580 600 620 6400
20
40
60
80
100
[cycle][k
m/h
]
Geschwindigkeit
v Obj =24.05 km/hv car =0.00 km/h
500 550 600 650
-100
-50
0
50
100
[cycle]
[Blic
kric
htun
g]
Blickwinkel
HAWtech Summer School 2011 - Advanced Driver Assistance Systems (ADAS)
Prof. Dr. T. Trautmann 01.08.2011- 27 -
CAR-Mechatronics
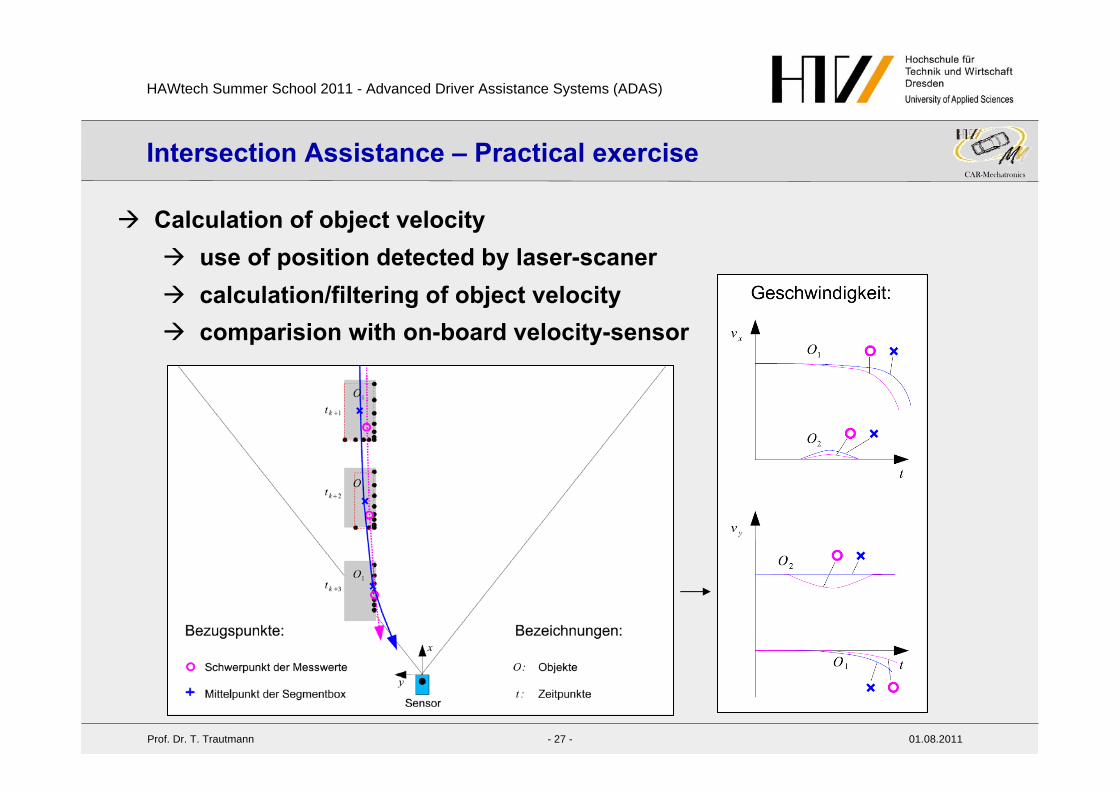
Intersection Assistance – Practical exercise
Calculation of object velocity use of position detected by laser-scaner calculation/filtering of object velocity comparision with on-board velocity-sensor