c marine engineering and management comem
TRANSCRIPT

ERASMUS MUNDUS MSC PROGRAMME
COASTAL AND MARINE ENGINEERING AND MANAGEMENT COMEM
COMPOSITE SEAWALL FOR WAVE ENERGY CONVERSION
Delft University of Technology June 2010
Abul Bashar Mohammed Khan Mozahedy
1550284

The Erasmus Mundus MSc Coastal and Marine Engineering and Management is an integrated programme organized by five European partner institutions, coordinated by Delft University of Technology (TU Delft). The joint study programme of 120 ECTS credits (two years full-time) has been obtained at three of the five CoMEM partner institutions: Norges Teknisk- Naturvitenskapelige Universitet (NTNU) Trondheim, Norway Technische Universiteit (TU) Delft, The Netherlands City University London, Great Britain Universitat Politècnica de Catalunya (UPC), Barcelona, Spain University of Southampton, Southampton, Great Britain The first year consists of the first and second semesters of 30 ECTS each, spent at NTNU, Trondheim and Delft University of Technology respectively. The second year allows for specialization in three subjects and during the third semester courses are taken with a focus on advanced topics in the selected area of specialization: Engineering Management Environment In the fourth and final semester an MSc project and thesis have to be completed. The two year CoMEM programme leads to three officially recognized MSc diploma certificates. These will be issued by the three universities which have been attended by the student. The transcripts issued with the MSc Diploma Certificate of each university include grades/marks for each subject. A complete overview of subjects and ECTS credits is included in the Diploma Supplement, as received from the CoMEM coordinating university, Delft University of Technology (TU Delft). Information regarding the CoMEM programme can be obtained from the programme coordinator and director Prof. Dr. Ir. Marcel J.F. Stive Delft University of Technology Faculty of Civil Engineering and geosciences P.O. Box 5048 2600 GA Delft The Netherlands

FACULTY OF ENGINEERING, SCIENCE AND MATHEMATICS
SCHOOL OF CIVIL ENGINEERING AND THE ENVIRONMENT
Composite seawall for wave energy conversion
Abul Bashar Mohammed Khan Mozahedy
June, 2010

i
UNIVERSITY OF SOUTHAMPTON
FACULTY OF ENGINEERING, SCIENCE AND MATHEMATICS
SCHOOL OF CIVIL ENGINEERING AND THE ENVIRONMENT
Composite seawall for wave energy conversion
Abul Bashar Mohammed Khan Mozahedy
“A dissertation submitted to the School of Civil Engineering and the Environment, University of
Southampton in partial fulfilment of the degree of M.Sc. in Coastal and Marine Engineering and
Management (CoMEM) by instructional course.”
June, 2010

ii
Summary
Detrimental impacts of fossil fuels and its foreseen scarcity are encouraging research for the
development of the renewable energy as alternatives. A newly developed composite seawall
concept could be a vitally important technique for wave energy conversion. A 3-D model of
composite seawall has been simulated to comprehend its hydraulic performance.
Composite seawall is a dual-purpose overtopping type of coastal shoreline device and wave
energy conversion is considered as by-product of the seawall. Overtopped water generates
hydraulic head convertible to electricity by means of low head hydro-power generator.
A 3-D physical model of composite seawall has been developed and tested for both normal and
oblique waves in this study. Fraude scale laws (geometric scale 1:50) are followed in the model
scaling. Total 72 simulations are conducted, and overtopping and hydraulic power generated at
the crest of the ramp of the composite seawall for each simulated wave parameters are
recorded. Hydraulic performances are measured based on the input wave parameters and
results. Wave breaker screen is also modeled and tested (by 12 simulations) to measure its
suitability as outfall.
Results show that maximum achievable hydraulic efficiency of the composite seawall is about
33.6 % and average hydraulic efficiencies are about 26.6%, 18.6%, 15.9% and 11.1% for the
freeboard of 0.5 m, 1.0 m, 1.5 m and 2.0 m respectively. Hydraulic performance decreases for
oblique wave approaches. Average hydraulic efficiency of a composite seawall (having 1.0 m
freeboard) is about 20% in case of 1.0 m tidal variation. Composite seawall is not suitable option
for high tidal variations and low wave heights. Wave breaker screen is a suitable outfall option
but it decreases hydraulic head generated in the composite sea walls up to 12.5%.
Composite sea walls for wave energy extraction could be suitable option in such a remote place
such as Islands, where conventional energy supply would be highly expensive and rarely
possible.

iii
Acknowledgement
The author wishes to express profound thanks to Dr. Gerald Muller, Senior Lecturer, School of
Civil Engineering and the Environment, University of Southampton for kindly supervising of such
an interesting and innovating research study. The author is indebted to him for the time, efforts
and supports, which he has given in the whole process of the research.
The author thanks to Mr. Rhys Jenkins for his valuable guidance and supports during the
physical modeling in the Hydraulics Laboratory.
The author thanks to all officials and PhD students of this University, who has helped in the
research study.
The author expresses thanks to relatives and friends for their supports and blessing.
Abul Bashar Mohammed Khan Mozahedy
Southampton, United Kingdom

iv
Contents
Summary ii Acknowledgement iii Contents iv List of figures vi List of tables vii List of abbreviations viii Chapter I: Introduction 1
1.1 Background 1 1.2 Objectives of the study 2 1.3 Scopes of the study 2 1.4 Methodology 2 Chapter II: Literature review 3
2.1 Wave energy 3 2.2 Linear wave theory 3 2.3 Wave transformations 6 2.4 Wave overtopping 8
2.5 Wave energy conversion 10 2.6 Overtopping WECs: Wave dragon and SSG 12 2.7 Composite seawall 14 2.8 Hydrostatic Pressure Wheel (HPW) 15 2.9 Physical modeling of coastal structures 17 2.10 Scaling and similitude 18 2.11 Scale effects 20 2.12 Laboratory effects 21 2.13 Outfall 21
Chapter III: Theory and Experiments 24
3.1 Experimental setup 24 3.2 Scaling of parameters 26 3.3 Wave overtopping prediction 27 3.4 Overtopping performance 29 3.5 Performance comparison with oblique waves 30

v
3.6 Power performance 30 3.7 Performance optimization against tidal variation 31
3.8 Outfall designing 31 3.9 Observations 32
Chapter IV: Results and discussion 33
4.1 Overtopping performance with normal waves 33 4.2 Hydraulic performance with normal waves 37 4.3 Overtopping performance at oblique waves 40 4.4 Hydraulic performance at oblique waves 42 4.5 Performance optimization with tidal variations 48 4.6 Outfall design 50 4.7 Simple experimental observations 52 4.8 Market potential of composite seawall for WECs 53
Chapter V: Conclusion 54
5.1 Conclusions 54 5.2 Further study 55
References 56 Appendix I: Sample calculations of wave analysis and overtopping 60 Appendix II: Sample prediction calculations of overtopping 61 Appendix III: Sample calculations of hydraulic performance 62 Appendix IV: Sample calculations of outfall design: wave breaker screen 63 Appendix V: Sketch of the designed outfall: wave breaker screen 64

vi
List of figures Figure 2.1: Ocean waves 3 Figure 2.2: Basic parameters of a monochromatic propagating wave 4 Figure 2.3: Wave reflection and standing waves 8 Figure 2.4: Overtopping of sloped coastal structures 9 Figure 2.5: Green and White water overtopping 9 Figure 2.6: Recently developed WECs 12 Figure 2.7: Wave dragon and its working principle 13 Figure 2.8: SSG and its working principle 13 Figure 2.9: High mound composite seawall, constructed at Mori port in Japan 14 Figure 2.10: Composite seawall for energy conversion 15 Figure 2.11: Schematic diagram of HPW and its theoretical efficiency 16 Figure 2.12: Submarine outfall system 22 Figure 2.13: flushing gate and its working principle 22 Figure 3.1: Composite seawall model of 1:50 scale 24 Figure 3.2: Wave tank 25 Figure 3.3: Model of the outfall 32 Figure 4.1: Measured overtopping with wave heights at different freeboard conditions 35 Figure 4.2: Comparisons of measured overtopping with predictions (Freeboard 1.0 m) 36 Figure 4.3: Comparisons of measured overtopping with predictions (Freeboard 1.5 m) 36 Figure 4.4: Hydraulic performance at significant wave height 39 Figure 4.5: Hydraulic efficiency of the seawall at significant wave heights 39 Figure 4.4: Overtopping at different angles (Freeboard 1.0 meter) 41 Figure 4.5: Overtopping at different angles (Freeboard 1.5 meters) 41 Figure 4.6: Wave period dependence of overtopping (Freeboard 1.5 meters) 42 Figure 4.7: Hydraulic power at different angles (Freeboard 1.0 meter) 46 Figure 4.8: Hydraulic power at different angles (Freeboard 1.5 meters) 46 Figure 4.9: Hydraulic efficiency at different angles (Freeboard 1.0 meter) 47 Figure 4.10: Hydraulic efficiency at different angles (Freeboard 1.5 meters) 47 Figure 4.11: Hydraulic performance with Hs/Rc ratios 49 Figure 4.12: Funnelling effect at oblique waves of 300 53
vii
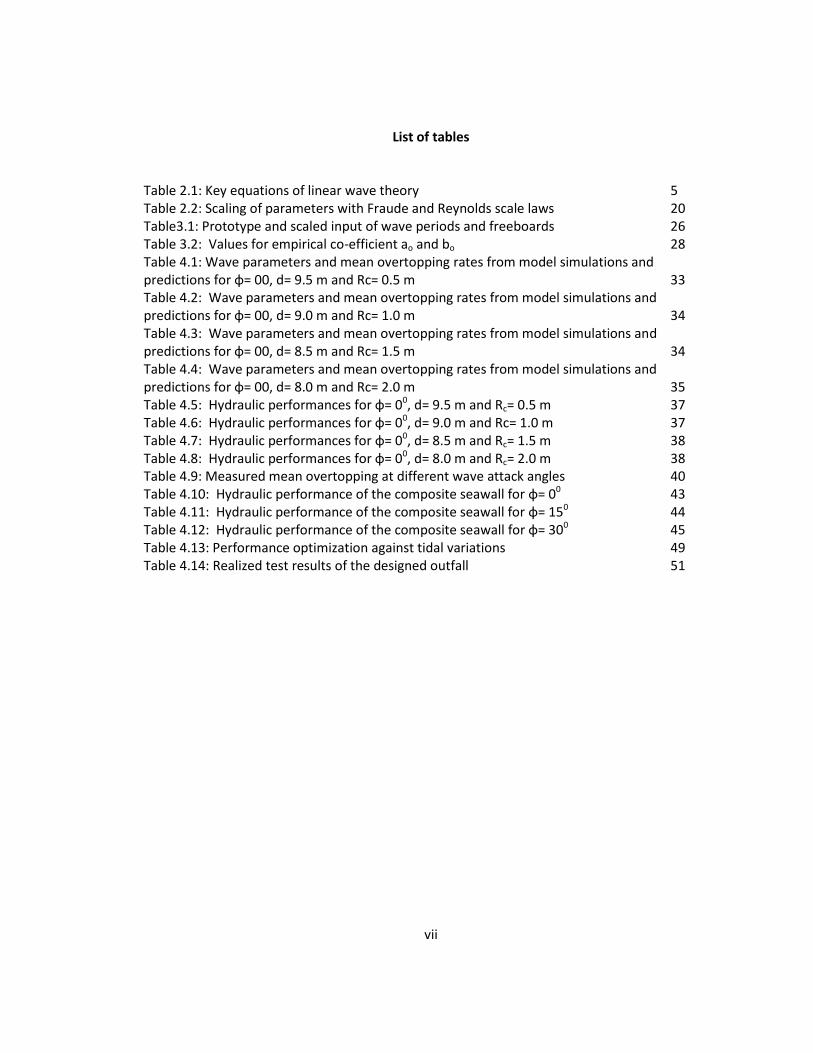
List of tables Table 2.1: Key equations of linear wave theory 5 Table 2.2: Scaling of parameters with Fraude and Reynolds scale laws 20 Table3.1: Prototype and scaled input of wave periods and freeboards 26 Table 3.2: Values for empirical co-efficient ao and bo 28 Table 4.1: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 9.5 m and Rc= 0.5 m 33 Table 4.2: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 9.0 m and Rc= 1.0 m 34 Table 4.3: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 8.5 m and Rc= 1.5 m 34 Table 4.4: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 8.0 m and Rc= 2.0 m 35 Table 4.5: Hydraulic performances for φ= 00, d= 9.5 m and Rc= 0.5 m 37 Table 4.6: Hydraulic performances for φ= 00, d= 9.0 m and Rc= 1.0 m 37 Table 4.7: Hydraulic performances for φ= 00, d= 8.5 m and Rc= 1.5 m 38 Table 4.8: Hydraulic performances for φ= 00, d= 8.0 m and Rc= 2.0 m 38 Table 4.9: Measured mean overtopping at different wave attack angles 40 Table 4.10: Hydraulic performance of the composite seawall for φ= 00 43 Table 4.11: Hydraulic performance of the composite seawall for φ= 150 44 Table 4.12: Hydraulic performance of the composite seawall for φ= 300 45 Table 4.13: Performance optimization against tidal variations 49 Table 4.14: Realized test results of the designed outfall 51

viii
List of abbreviations HPW Hydrostatic Pressure Wheel HHWL Higher High Water Level HWL High Water Level LLWL Lower Low Water Level LWL Low Water Level MWL Mean Water Level OWC Oscillating Water Column SSG Sea Slot-cone Generator UK United Kingdom WEC Wave Energy Converter 2-D Two Dimensional 3-D Three Dimensional

1
Chapter I
Introduction
1.1 Background
Carbon emission to the atmosphere causes global warming. Uses of fossil fuel have brought
detrimental changes to the global climate during last decades. Moreover, world reserve of the
fossil fuel (mainly oil and gas) is depleting at an accelerating rate due to tremendous
dependence on them. Hence, development of renewable energies is a growing demand as an
alternative source of energy.
Among the renewable energies, wave energy is vitally important, although considerable
progress is not achieved yet. Sometimes, composite sea walls consist of obstacles in front of it to
enhance wave energy dissipation and to reduce wave loadings and related damages. This type
of composite seawall is constructed recently at Mori port in Japan and research shows that 15%
construction cost is reduced in the composite seawall compared to the conventional Japanese
seawall (Mori, 2008).
A composite seawall with narrow reservoir along its length has been developed at Southampton
University to convert wave energy into potential energy. Muller (2009) has pointed out that
main advantage of this seawall is its cost-effectiveness, as it is a dual purpose structure,
providing protection and energy generation. Water is collected in the reservoir through
overtopping to create head difference. A Wave Energy Converter (WEC) has been developed
using Hydrostatic Pressure Wheel (HPW), which is found potentially very effective for very low
head differences.
Muller (2009) described the HPW as a very simple and cost-effective hydropower converter
which can tolerate large variations in flow rate. The combination of a very low head (less than 1
meter) hydropower source with this converter could result in an overall cost-effective system.
Maravelakis (2009) measured efficiencies of the composite seawall for WEC in 2-D physical
model tests and found that maximum hydraulic efficiencies are about 32% in 1/50 scale model
and about 28% in 1/23 scale model.
Sea states are random and obviously it is three dimensional (3-D) in nature. Hydraulic
performance mainly depends on the collection of water in the reservoir. Water collection
depends on the wave height and its consistency with time. 3-D physical model testing will lead

2
to determine hydraulic performance of the system. Parallel waves and oblique waves may give
different results in collecting water, which will be compared in this project.
The outfall of the composite seawall is very important as the HPW will be installed at outlet. It
should be free from wave actions to ensure smooth functioning of the HPW and to have easy
passage of water return to the sea. Suitable outfall designs will be developed and tested in this
project, considering various factors involved such as random wave attack and fluctuations of the
water surface.
1.2 Objectives of the study
The aims of the research study are to develop realistic performance prediction tools and design
details for composite seawalls as WEC. Specific objectives of the study are as follows:
1. Hydraulic performance of a composite seawall in 3-D physical model.
2. Performance comparison for oblique waves with regular waves.
3. Detailing of suitable outlets based on model study results.
1.3 Scope of the study
Main scopes of the study are the availability of physical modelling facilities in the hydraulic
laboratory at Southampton University. The facilities include 3-D wave basin, wave generating
and monitoring devices and composite seawall (scale 1:50).
1.4 Methodology A 3-D physical model of composite seawall will be constructed in the 3-D wave basin of the
hydraulic laboratory. Waves will be produced by wave generating devices at different angles and
magnitudes. Water will be collected in the reservoir of the composite seawall through
overtopping. The model will be tested in the laboratory to determine hydraulic performance of
the system. Model results will be converted into the prototype results for analysis and better
understanding. Suitable outfall will be designed and tested in the model.

3
Chapter II
Literature Review
2.1 Wave energy
Ocean waves are caused by the wind stress while wind blows over the water surface. Waves are
sinusoidal fluctuations (ups and downs) of the water surface in the sea. Wave gets energy from
wind stress and becomes a powerful source of renewable energy.
Figure 2.1: Ocean waves (OCS, 2010 and Muller, 2009)
2.2 Linear Wave Theory
Among the regular wave theories, linear wave theory, proposed by Sir George Airy (1801-1892)
for two dimensional and freely propagating periodic gravity waves, is appropriate only for waves
of small steepness (small H/L). Steeper waves become progressively more non-linear as the
limiting condition (Chaplin, 2009). Linear wave theory is used in this thesis to calculate and
analyze wave parameters as it is easy to apply and extensively used in wave analysis. Important
and relevant literary descriptions of linear wave theory are taken from Chaplin (2009). Basic
parameters of a monochromatic propagating wave are shown in the figure 2.2.

4
Figure 2.2: Basic parameters of a monochromatic propagating wave (Chaplin, 2009)
In the above figure 2.2, the reference frame (x, z) is fixed in space and on the free surface, the
value of z is a function of x and t so that z= η(x, t). Wave parameters are discussed as follows:
L= Wave length, is the linear distance between two successive identical points (for example
crests or troughs) on the wave.
T= Wave period, time difference between two successive identical points (wave length).
H= Wave height, vertical distance between two successive crest and trough.
d= Water depth, from the Mean Water Level (MWL).
f= Wave frequency= 1/T (in Hz).
ω= Wave frequency = 2π/T (in radians/sec).
k= Wave number= 2π/L
a= Wave amplitude= H/2.
H/L= Wave steepness.
d/L= Relative depth.
C=Wave celerity= L/T.
At any arbitrary point, the velocity of the water particle has both horizontal and vertical
components (u, w), which are function of x, z and t. Shape of the water particle movement
depends on the relative depth (d/L) of water. This shape is circular in deep water and diminishes

5
along the depth, whereas it becomes horizontally elliptical in shallow water and diminishes
along depth until it touches the bottom. Conditions of deep and shallow waters are as follows:
Deep water depth when d/L>1/2.
Shallow water depth when d/L<1/20.
Intermediate water depth when 1/20≤d/L≤1/2.
Basics assumptions (and conditions for solution) of linear wave theory:
Wave steepness (H/L) is small.
Surface tension is unimportant and negligible.
The fluid is homogeneous, incompressible and fluid viscosity is negligible.
The flow is irrotational. Shearing forces are neglected.
Sea bottom is impermeable meaning vertical particle velocity at the bottom is zero.
Pressure at the free surface is atmospheric.
Motion of the free surface is compatible with motion of the water.
Useful key equations of the linear wave theory are given the following table 2.1:
Table 2.1: Key equations of linear wave theory (Chaplin, 2009)
Wave parameter
Deep water (d/L>1/2)
Intermediate water (1/20≤d/L≤1/2)
Shallow water (d/L<1/20)
Surface elevation
Wave length
L= T.(gd)1/2
L=1.56.T2
Celerity
C= (gd)1/2
C=1.56.T
Group celerity
Cg= C/2
Cg= C
Energy density
E= ρg H2/8
E= ρg H2/8
E= ρg H2/8
Wave power
P= ECg
P= ECg
P= ECg

6
In the table 2.1,
ρ= Density of water
g= Gravitational acceleration
C= Celerity or velocity of wave
Cg= Group velocity
E= Energy density, average energy per unit area of sea surface
P= Power propagated by wave per unit width
(Other wave parameters are defined in the previous paragraphs)
2.3 Wave Transformations
Wave parameters change due to changes in water depth, seabed geometry and contours while
it travels towards the shore. Superimposition of reflected and incidence waves and any
obstructions on its way also cause changes in wave parameters. Four important causes and their
consequences (based on Chaplin, 2009) are described below for better understanding of the
physical modelling effects.
Shoaling
Wave shoaling is the changes in wave length and wave height due to reducing water
depth (assuming that wave period (T) and wave power (P) remain unchanged), when the
wave crests are parallel to the seabed contours while travel towards the shore. Generally
wave height increases when wave crest travels from deep water to shallow water.
Shoaling co-efficient (KS) relates the changes in wave height in the following way.
(2.1)
Where
KS is shoaling co-efficient
H0 is wave height in deep water
H is wave height at shallow water depth (d)
L is the wave length at shallow water depth (d)

7
Refraction
When wave crest travels at an oblique angle with the seabed contours, it tries to be
parallel and hence change occurs in wave height (assuming no power travels sideways
along the crest). Eventually refraction reduces wave height while travelling towards the
shore. Refraction co-efficient (KR) relates changes in wave heights and angles of approach
in the following way.
(2.2)
Where
KR is refraction co-efficient
H0 is wave height in deep water depth
α0 is angle of wave approach in deep water depth
H is wave height at shallow water depth (d)
α is angle of wave approach in shallow water depth (d)
Diffraction
When there are rapid changes in the wave height along the wave crests, power travels
sideways. This phenomenon is called wave diffraction. Diffraction happens when wave
encounters obstructions (like breakwater, groin, spar etc) in its way to the shore.
Reflection
When wave reflects upon vertical or inclined wall, the reflected wave collides with the
incoming incidence wave and superimpose together to form a new wave changing wave
length and height. The newly formed wave is standing wave. Phenomena of wave
reflection and standing waves are shown in the figure 2.3.

8
Figure 2.3: Wave reflection and standing waves (Chaplin, 2009)
Reflection co-efficient (Rreff) is as follows:
(2.3)
Where
Hmax is maximum wave height at the anti-node of the standing wave
Hmin is minimum wave height at the node of the standing wave
2.4 Wave overtopping
The main purpose of the coastal structures (seawall, dike, revetment, breakwater etc) is to
protect land and properties from the wave attack, still storm waves cause overtopping of these
structures and endanger lives and coastal infrastructures. Lots of research and experimental
investigation has been done during the last 50 years to understand overtopping phenomena and
guidelines has been derived to design coastal structures in order to minimise overtopping
damages. Concept of the coastal wave overtopping is shown in the figure 2.4.
Wave reflection and superimposition
Perfect standing wave
Imperfect standing wave

9
Figure 2.4: Overtopping of sloped coastal structures (EurOtop, 2007 and HR Wallingford, 2010)
During stormy conditions, wave approaches up the face of a sloped structure and passes over
the crest as like as a sheet of water, which is called green water overtopping. White water
overtopping or impulsive overtopping occurs when waves hit the face of the coastal structures
(like seawall) with tremendous pressure and mixed with air, then push this aerated water
vertically up of the structure. These two types of overtopping are shown in the figure 2.5.
Figure 2.5: Green and White water overtopping (Soliman, 2003 and Muller, 2009)

10
Overtopping discharges vary up to several orders of magnitude from one wave to another under
random wave conditions, meaning that it is a non-linear function of wave height and wave
period. Overtopping depends not only on wave parameters such as wave height, wave period,
wave length, water level but also on geometric layout and material properties of the structure
(Soliman, 2003).
However many researchers have been trying to develop methods and formulas in order to
predict overtopping discharges of coastal structures on certain possible conditions. These
prediction formulas are widely varying and results in wide variations.
Most of the prediction methods and formulas for mean overtopping rate are derived from
numerical and physical modelling in the laboratory facilities, which leads to develop empirical
relationship of overtopping discharge rate with wave parameters, basin geometry and material
properties of the structures. Renowned prediction methods and formals are derived by Owen
(1980, 1982), Brudbury and Allsop (1988), Pedersen and Burchartch (1992), Van der Meer and
Janssen (1995) and Goda (2000). All of the prediction formulas are derived for sloping coastal
structures (with or without rocked armour and crown wall) of more or less generally
impermeable, smooth or rough, straight or bermed sloped seabed geometry (ibid).
Moravelakis (2009) has found Owen (1980) to be unsuitable for the predictions of wave
overtopping over a composite seawall in 2-D wave basin and the prediction results by Van der
Meer and Janssen (1995) and Goda (2000) are more ordered than that of Owen (1980).
Among the above overtopping prediction formulas, Owen (1980) and Van der Meer and Janssen
(1995) are used to predict overtopping rates of the 3-D physical model in this thesis. Details of
these two prediction methods are described in the chapter III.
2.5 Wave energy conversion
Fossil fuel causes detrimental changes in the environment due to CO2 emissions. Moreover,
extensive use of fossil fuel is depleting rapidly the reserves of oil, coal and gas. Wave energy
conversion from renewable energy sources can be an alternative solution of the fossil fuel.
Among the renewable energy resources, exploitation of wave energy has been studied during
last decades, although considerable progress has not been achieved yet to compete with other
energy sources in the market. The main hindrance is that it is hardly possible to harness this
energy in economically viable way and convert it into electricity in large amounts. Kine (2005)
11
opined that there have been many attempts taken to harness the power of the ocean waves
over the last century, some showing limited short-term success but ultimately failing due to
technical or economic reasons. However, research continues to find out potential Wave Energy
Converter (WEC).
The already existed WECs can be distinguished into two categories: offshore WECs and shoreline
WECs. Offshore WECs are floating or submerged devices in deep water and anchored to the
seabed. Exploited energy is transferred to the shore by means of cables placed on the seabed.
Shoreline WECs are generally placed along the shore in shallow water and sometimes, can be
integrated with shoreline defenses (Maravelakis, 2009).
Offshore WECs may exploit huge potential of high wave energy density environment but they
suffer from extreme wave loadings, costly underwater cable connection for electricity
transmission, and difficulty in maintenance works. Shoreline WECs has relatively low potential of
wave energy as energy dissipated into the shallow waters. However, they may be cost-effective
due to low initial and maintenance costs and greater accessibility. Shoreline WECs can be
constructed in combination with shoreline defenses, which will eventually reduce production
costs too (ibid).
Among the WECs, Oscillating Water Column (OWC), Pelamis, Wave dragon, Oyster etc. are
prominent and recently developed devices (shown in the figure 2.6).
The existing WECs are differed in their working principles too. OWCs are chambers where water
level rises and falls with the wave fluctuations, causes air movement, which regulates air
turbine. Pelamis is a buoyant moored device developed by Ocean Power Delivery Ltd, which is
moved by the waves and energy is extracted from this motion. Oyster is a recent development
of WECs suitable in shallow water depth and still under research (ibid).

12
Figure 2.6: Recently developed WECs (Maravelakis, 2009 and Muller, 2009)
2.6 Overtopping WECs: Wave dragon and SSG
Overtopping devices are water reservoir, which collect water through wave overtopping and
generate potential hydraulic head. This hydraulic head drives a turbine to produce electricity.
Wave dragon is an overtopping device, which is usually installed in offshore. Waves run over the
ramp of the device and the water is stored in a reservoir. As more water enters the reservoir, an
equal amount of water is forced out through the turbine in the centre, causing it to rotate and
generate electric power (Kine, 2005). A simple wave dragon and its working principle are shown
in the figure 2.7.
OWC
OWC
Pelamis
Oyster

13
Figure 2.7: Wave dragon and its working principle (Wave dragon, 2005)
Sea Slot-cone Generator (SSG) is another overtopping device, which is placed along the shore
and integrated with shoreline defence systems like breakwater or rock cliff. There are multiple
reservoirs placed on top of each other, in which water from incoming waves is stored and then
runs multi-stage turbine to produce electricity. Multiple reservoirs utilize different heights of
water head and hence result in a high overall efficiency (Kofoed, 2005). A SSG and its working
principle are shown in the figure 2.8.
Figure 2.8: SSG and its working principle (Wave energy, 2005 and Leonard energy, 2007)

14
2.7 Composite seawall
Seawall is normally constructed along the coastline to protect land and property. However,
extreme waves cause overtopping of the seawall and endanger lives and properties during
storm and hence seawall has been gone through several modifications such as curved top etc. in
order to minimise overtopping. Recently a high mound composite seawall has been developed
and constructed at Mori port, Japan. Research shows that 15% construction cost is reduced in
the composite seawall compared to the conventional Japanese seawall (Mori, 2008). This
composite seawall has an armoured slope and a curtain of vertical piles in the front of the actual
seawall. The curtain dissipates wave energy and therefore, it reduces wave loads on the seawall.
A sketch composite seawall is shown in the figure 2.9.
Figure 2.9: High mound composite seawall, constructed at Mori port in Japan (Mori, 2008).
Southampton University, UK is currently developing an overtopping type composite seawall for
wave energy conversion. The curtain is replaced by an impermeable ramp to create a water
reservoir, which is shown in the figure 2.10. Overtopping water is collected into the reservoir to
create hydraulic head for energy conversion. However the generated hydraulic head is very
small (about 1.0 meter), and hence Hydrostatic Pressure Wheel (HPW), a potentially very
effective converter for low head differences, has been developed in the hydraulic laboratory
(Muller, 2009).

15
Figure 2.10: Composite seawall for energy conversion (Muller, 2009)
Muller (2009) has pointed out main advantage of this seawall as its cost-effectiveness. It is a
dual purpose structure, providing coastal protection and energy generation, but it is
incompatible in the tidal coastal waters.
2.8 Hydrostatic Pressure Wheel (HPW)
Composite seawall creates hydraulic head difference in the order of 1.0 meter. Low head
hydropower converter is needed to exploit wave energy of overtopping type composite seawall
in a cost-effective way. Wave dragon and SSG use low head water Kaplan turbines, but it is
rarely considered as economically viable. Southampton University has developed a special type
of Hydrostatic Pressure Wheel (HPW), which is very effective in conversion of low head
differences (Muller, 2009).
HPW is usually installed at the end (outlet of the reservoir water) of the composite seawall and
the vanes rotate around its axis due to hydraulic head difference, when water passes through it.
A schematic diagram of HPW is shown in the figure 2.11.

16
Figure 2.11: Schematic diagram of HPW and its theoretical efficiency (Muller, 2009) In figure 2.11, HPW consists of a wheel of radius R, whose blades act as like as weir, creating
head difference (d1-d2). The hydrostatic pressure force (F=F1-F2) between upstream and
downstream acts on the blades. Muller (2009) assumes that blades move with the velocity of
the upstream water flow (v1). Hence, the power generated by the HPW is P= F × v1= (F1-F2) × v1.
Available Hydraulic power: (2.4)
Hydrostatic force on the blade: (2.5)
Hence theoretical efficiency of the HPW: (2.6)
(Muller, 2009)
For average wave heights of 1 m and a head difference of 0.9 m, a hydraulic power of 1.2 to 2
KW/m wall can be expected, provided that the energy converter has an estimated efficiency of
65% (hydraulic to electric), giving an overall efficiency of 17 to 28 % (Muller, 2009).
Maravelakis (2009) has measured maximum hydraulic efficiencies of the composite seawall in 2-
D physical model tests and found these efficiencies are about 32% in 1/50 scale model and
about 28% in 1/23 scale model.

17
2.9 Physical modelling of coastal structures
Physical modeling is an important tool of testing and validation for coastal engineers. Physical
models help to understand the complex hydrodynamic behavior of coastal structures, which
provide reliable and economic engineering design solutions (Hughes, 1993). Hughes (1993)
defines physical model as physical system reproduced at a reduced size so that the major
dominant forces acting on the system are represented in the model in the correct proportion to
the actual physical system.
Svendsen (1985) identifies three objectives of physical modeling in coastal engineering:
understanding insight of a physical phenomenon, verification of theoretical results and
obtaining measurements of complicated phenomena, which is inaccessible by theoretical
approaches. Dalrymple (1985), Le Mehaute (1976) and Kampphuis (1991), all have pointed out
major advantages and disadvantages of physical modeling study in coastal engineering. Main
advantages are no assumptions or omissions for simplification required, smaller size of the
model compared to the prototype makes easy acquisition of desired data, gives immediate
qualitative impression of the physical coastal processes and helps decision making process in
easy, quick and cost effective manner. Main disadvantages include scale effects and laboratory
effects during physical modeling study (Hughes, 1993).
Two types of physical modeling are found in the coastal engineering to study near shore coastal
physical characteristics. Fixed bed models are used to study propagation of waves and currents
in the coastal region. Fixed bed models can be either wave flume (2-D) or wave basin (3-D),
where evolution of waves can be studied over non-uniform bed geometry to observe physical
processes like refraction, diffraction, shoaling, breaking etc. Movable bed models are used to
study effects of water motion on deposition and transport of sediments. Physical modeling can
be either short term (hours to days) or long term (day to years), whereas short term modeling is
more practical to conduct in coastal engineering. Keulegan (1966) has pointed out two
requirements for success in physical modelling, which are equivalence between prototype and
model must be met to the extent possible under the constraints of the study and model data
must be properly interpreted in view of the known model shortcomings (ibid).
In the present study, fixed bed and short term physical model is used to study wave
propagations and to derive desired data of wave parameters and overtopping discharge.

18
2.10 Scaling and similitude
A prototype is the situation, which is being modelled, either in the same size or more often at
reduced scale. Scaling is fundamental in order to predict the processes of the prototype under
investigation. Scale ratio is the basis of correspondence tool of input parameters and results
between prototype and model. Le Mehaute (1976) has pointed out few criteria of a scale model.
Scale model must be exact in reproducing the phenomena under study, must be consistent in
producing results, must be sensitive and economical and must be of reasonable size within
reasonable time interval.
Scaling of a model in coastal engineering can be done by dimensional analysis. Hughes (1993)
has given details of methods of dimensional analysis in scaling of coastal physical models. Scale
ratio (Nx) is the ratio of the value of a parameter in the prototype (Xp) to the value of the same
parameter in the model (Xm). The reciprocal of this definition is also true.
Nx= Xp/Xm (2.7)
Similarity and similitude requirements should be met to reproduce a good model to a prototype.
Similitude is achieved when all the factors are in proportion between the prototype and the
model and the factors that are not in proportion should be so small as to be insignificant in the
process (Hughes, 1993).
There are three types of similarities in the hydraulic engineering: geometric similarity, kinematic
similarity and dynamic similarity. Geometric similarity means model is geometrically similar with
the prototype. Kinematic similarity means that all the motions (velocity, acceleration etc.) acting
on the model is similar with that of the prototype. Dynamic similarity means that the forces in
the model remain in the same relative (in proportion) magnitude as in the prototype (Hughes,
1993 and Dalrymple, 1985).
Dynamic similitude requires careful consideration of the forces acting on the system according
to their relative importance. Scale laws are simplified dynamic similitude of two interplayed
major forces. Scale criterion is the ratio between the inertia force to any other force, required to
be same in the model as in the prototype (Hughes, 1993).

19
Froude criterion: Froude number (Fr) is the square root of the ratio of inertia force to the gravity
force. Fraude number must be same in the model as in the prototype for dynamic similitude,
where gravity dominates over inertia. It is dimensionless and it can be simplified in the following
way:
(2.8)
Where, Fr= Froude number
u= Velocity
g= Gravitational acceleration
L= Length
Equation (2.8) is the Froude model criterion in which inertia is balanced by gravity, which is very
important for most flows with free surface. Hence, Froude criterion is widely used in the
hydraulic and coastal engineering model design (ibid).
Reynolds criterion: Reynolds number (Re) is the ratio of inertia force to the viscous force.
Reynolds number must be same in the model as in the prototype for dynamic similitude, if
viscous force dominates over the inertia. It is dimensionless and it can be simplified in the
following way:
(2.9)
Where, Re= Reynolds number
u= Velocity
ρ= Density of the fluid
μ= dynamic viscosity
L= Length
Forces related to the surface tension and elasticity are so small that they can be neglected from
the scaling a model in coastal engineering problems. Both Reynolds criterion and Froude
criterion are very important for designing the scaling of a specific model in coastal engineering,
but both can not be used at the same time. So it has to be determined which force between
gravity and viscous is dominating in the system (ibid).

20
Fraude criterion is used for the scaling of the model parameters in this study. The scaling of
several parameters is illustrated according to Fraude and Reynolds scale laws in the table 2.2.
Table 2.2: Scaling of parameters with Fraude and Reynolds scale laws (Hughes, 1993)
Parameter Unit Fraude scaling Reynolds scaling
Length m NL NL
Area m2 NA=NL2 NA=NL
2
Volume m3 NV=NL3 NV=NL
3
Time s Nt=NL1/2 Nt=NL
2/NV
Velocity m/s Nu=NL1/2 Nu=NV/NL
Overtopping rate m3/s/m Nq=NL3/2 Nq=NV
2.11 Scale effects
Hughes (1993) defines scale effects in the physical modelling as the differences between
prototype and model response that arise from the inevitably to simulate all the relevant forces
in the model at the proper scale dictated by the scaling (similitude) criteria. Le Mehaute (1976)
identifies scale effects as the error occurred due to unsatisfactory reproductions of some
phenomena in the smaller scale of the model compared to the prototype. Use of Fraude scale
law in the physical modelling incorrectly scaled forces related to viscosity and surface tension.
Similarly use of Reynolds scale law incorrectly scaled forces related to gravity and surface
tension in the model.
Le Metaute (1976) shows that scale effect of surface tension in wave propagation is less than 1%
if wave period and water depth are greater than 0.35 s and 2 cm respectively. Hughes (1993) has
pointed out that although surface tension produces insignificant scale effects, air entrainment in
breaking waves is affected since the size of the bubbles is determined by surface tension. The
content of the air bubbles is relatively small and less in number in the model.
Wave attenuation is the scale effect occurs by friction (both internal and bottom boundary
frictions) arising from viscosity of water due to neglecting Reynolds scale laws in hydraulic
physical modelling. Viscosity becomes important on wave run up and overtopping, which are
eventually decreased due to thinning of water layer in case of small overtopping rates (ibid).

21
2.12 Laboratory effects
Hughes (1993) defines laboratory effects as the differences occurred in the physical modelling
between prototype and model response due to limitations of the laboratory facilities such as
wave and flow generation techniques, solid model boundaries etc.
Incorrect reproduction of the prototype due to limitation of the model structure, geometry,
model boundaries etc. leads to laboratory effects in the physical modelling study. Sides of the
wave basin may affect the wave propagation by developing cross waves and wave damping
(Kortenhaus et al, 2005). Svendsen (1985) shows that a decrease of about 26% in wave height is
expected 30 m away from the wave maker in the flume.
Reflection of waves on the wave maker is another laboratory effect, which generates perfect or
imperfect standing waves and changes wave properties in the physical modelling results in the
flume or tank. Wave absorbers may reduce reflection and absorb unwanted reflected wave
energy (Hughes, 1993).
Use of tap water instead of seawater is another laboratory error in the coastal engineering
physical modelling study. Le Mehaute (1976) shows that 3% difference in density of water could
lead to 10-15% error on minimum weight of armour stones in the breakwater stability design
studies.
Influence of wind is an important laboratory effect of wave overtopping test, error occurs as
effects of wind transport are not considered in the coastal physical modelling study (kortenhaus
et al, 2005).
EurOtop (2007) noticed that position of the tray in the flume affect overtopping volume of
water, is another laboratory effects.
2.13 Outfall
Sea outfalls are normally used to discharge urban and industrial waste water and thermal water
from power plants. These outfalls are designed to facilitate mixing of the waste water over a
large volume of water in order to dilute waste and thermal water very quickly (Kumer, 1990).
Position of outfall and methods of discharging depends on types of the pollutants and their
processing (dilution, bio-degradation etc.) in the sea water. Based on pollutant types, physical

22
and environmental considerations, types of the receiving water body etc., outfalls can be
submarine, sub-surface or outlet at rivers, estuaries etc.
Submarine outfall: This type of outfall is usually suitable for thermal waste (also used for
industrial and urban) water disposal at deep sea or river bed. Waste water is conveyed by a
pipe, which is placed beneath seabed or riverbed. The main purpose is environmentally viable
disposal and proper mixing of waste water over a large water body (figure 2.12).
Figure 2.12: Submarine outfall system (Elmosa, 1989)
Flushing outlet: This outlet allows one way passage of the waste water discharge. This gate is
widely used for agricultural drainage against tidal variation. Gate becomes open during ebb tide
to allow drainage and remains close during flood tide (BWDB, 1988). Flushing outlet is also used
for urban sewerage outfalls at sea. A flushing gate and its working principle are shown in the
figure 2.13.
Figure 2.13: flushing gate and its working principle (ACU-GATE, 2003)

23
Wave breaker and breakwater: Breakwater is usually built to break waves and to keep water
calm inside the harbor. Revetments are used to break waves and to protect banks from erosion.
Rock, tetrapod, accropod, dolos, cube etc. are placed as armor units on the breakwaters or
revetments in single or multiple layers (Kamphuis, 2002). Mori (2008) used screen of vertical
piles in front of the seawall as a primary wave breaker. The curtain dissipates wave energy and
therefore, reduces wave loads on the seawall (figure 2.9).

24
Chapter III
Theory and Experiments
3.1 Experimental set up
Physical model study of a composite seawall for wave energy conversion has been conducted at
the Hydraulic Laboratory of the Southampton University, UK. A model of composite seawall
(about 1.2 m long) has been developed in a geometric scale of 1:50 for the present study, which
is shown in the figure 3.1.
Figure 3.1: Composite seawall model of 1:50 scale
The composite seawall was placed at a rectangular wave tank (length 3.0 m, width 1.5 m and
height 0.32 m), which is shown in the figure 3.2. The wave tank was equipped with wave peddle
and wave probes. The waves peddle and wave probes were connected with the computer
systems for wave generation and recording of wave parameters. Waves of specific parameters
were generated by the wave peddle systems. Software used in this system to generate waves
was ‘OWEL Drive and Collect’, which was a batch data taker and collect program. The wave
probes were used to collect water level fluctuations with time, which was measured through the
changes in the electric capacitance occurred due to water level fluctuations. The wave probes

25
were calibrated each day before going for model simulations. The software ‘COLLECT32’ was a
John’s 32-channel data collection program (1.01ASCII), which was used to calibrate the wave
probes to establish a relationship between water level fluctuations and changes in electric
capacitance. The data recordings were processed in tables and graphs to find out the realized
wave parameters with Microsoft Excel 2007. Wave parameters such as significant wave height,
wave period etc. were collected from the recording.
Figure 3.2: Wave tank
Simulations have been conducted for three positions of the composite seawall with respect to
the wave attack, which were normal wave attack (00 angle) and oblique wave attacks (150 and
300 angles). The study was conducted for unbroken waves only. The volume of water entered
into the water reservoir through overtopping was measured by water level gauge (area of the
reservoir was known) and mean overtopping rates were calculated. All model input data and
results were converted into prototype input data and results for analysis.

26
3.2 Scaling of parameters
Scaling of the model dimensions, wave parameters (height, period and wave length) and
overtopping rates were scaled following the Fraude scale laws (table 2.2). According to the
Fraude scale laws, geometric scale of the model was chosen as 1:50 for an imaginary prototype.
So, time scale and volumetric scale of the model became 1:7.07 and 1:125000 respectively.
Prototype and scaled input of wave periods (time scaling) and freeboards (geometric scaling) are
shown in the table 3.1. Composite seawall concepts for wave energy conversion are suitable
only for areas of low tidal ranges such as Mediterranean Sea and therefore, wave parameters
and freeboards are chosen accordingly.
Table3.1: Prototype and scaled input of wave periods and freeboards
Wave period Freeboard
Prototype, sec Model, sec Prototype, m Model, mm
4 0.57 0.5 10
6 0.85 1.0 20
8 1.13 1.5 30
2.0 40
Frequency of the wave peddle movements was calculated from the chosen wave period and
corresponding amplitude was set from observations of the model simulation results by trial and
error basis to set it for a specific significant wave height (Hs) generation.
Three wave heights were chosen to generate in simulation of each wave period, ranged from 0.5
to 2.5 m (10 to 50 mm in the model scale). But realized wave periods and significant wave
heights of the model simulations were collected from recording after each simulation. Wave
length has been calculated from the simulation results and water depth. All model results were
converted into full scale prototype results for analysis.
In each simulation, model overtopping rate (qm) was measured in m3/sec/m and then this was
converted into prototype overtopping rate (qp) according to Fraude scale laws (table 2.2) in the
following way.
qp= 501.5× qm (3.1)

27
3.3 Wave overtopping prediction
Overtopping of the 3-D physical model has been predicted by Owen (1980) and Van der Meer
and Jassen (1995) and compared with the measured overtopping rates. Aims of these formulas
are to minimise the overtopping of the sloped coastal structures while aims of composite
seawall are to maximise the overtopping in order to create hydraulic head as high as possible for
energy conversion. Both of the formulas predict wave overtopping rates at slopping coastal
structures, which are described below.
Owen (1980)
Owen (1980) proposes an overtopping formula of dimensionless overtopping rate (q) and
dimensionless freeboard (Rc) for simple smooth impermeable and simply sloped seawall. This
formula is originated based on extensive data set from model tests of sloped structures (Torch,
2004).
Owen (1980) overtopping formula reads (as in ibid):
(3.2)
Which is valid only when
(3.3)
Where
q is mean overtopping discharge rate per meter of width of the structure
Rc is the freeboard of the structure
Yr is surface roughness (Yr= 1.0 for smooth surface)
Tm is the mean wave period at the toe of the structure
g is gravitational acceleration
Hs is the significant wave height at the toe of the structure
In Owen (1980) method, wave height is considered as post breaking wave height. Besley (1999)
clarified the post breaking wave height as the significant wave height for correct overtopping
based on physical model tests (Soliman, 2003).

28
Goda (2000) suggested that the wave height in the near shore should be considered as the wave
height at the toe of the structure. Franco et al. (2009) measured the wave height in the field 220
meters seaward of the structure and in the corresponding scaled distance in the model studies
(Maravelakis, 2009).
ao and bo are two dimensionless empirically derived co-efficient in this methods, whose values
depend on the slope. Owen (1980) proposes values for different slopes, which are shown in the
table 3.2. Intermediate values were calculated by linear interpolation in this study.
Table 3.2: Values for empirical co-efficient ao and bo (Besley, 1999)
Slope of the seawall Values of ao Values of bo
1:1 0.00794 20.1
1:1.5 0.00884 19.9
1:2 0.00939 21.6
1:2.5 0.0103 24.5
1:3 0.0109 28.7
1:3.5 0.0112 34.1
1:4 0.0116 41.0
Besley (1999) (based on soliman, 2003) recommended that Owen (1980) is applicable for
smooth, simply slopping bermed seawall around UK coastline. Therefore he proposed
modification of the Owen (1980) formula for oblique waves, bermed slopes and surface
roughness.
Equations (3.2) and (3.3) were used to calculate overtopping rate (qOwen) as Owen prediction for
a specific significant wave height (Hs), wave period (Tm) and freeboard (Rc) of the structure in the
present study. The overtopping predictions were calculated for smooth bed, straight slope and
normal wave attack only.
Van der Meer and Janssen (1995)
Van der meer and Janssen (1995) proposes different overtopping formulas for non-breaking and
breaking waves on slopping structures, which has gone through minor changes from time to
time. The new set of formulae relates to breaking waves and is valid up to a maximum which is

29
in fact a non- breaking region. The rewritten overtopping formulas (Van der meer, 2002) for
dikes are as follows.
(for <2) (3.4)
With a maximum (non-breaking condition)
(for >2) (3.5)
Where
q is overtopping rate per meter width of the structure
Rc is the freeboard of the structure
is the average slope of the structure and the approaching seabed.
Hm0 is significant wave height based on the spectrum
g is the gravitational acceleration
уb, уf, уβ and уv are correction factors for the presence of a berm, surface roughness, oblique
wave attack and presence of a vertical wall on the slope respectively.
is the breaker parameter, the above equations are valid for <5.0.
is the wave steepness.
Lo is the wave length in deep water.
Waves generated in the present physical model study were non-breaking type; therefore
equation (3.5) was used to calculate overtopping rates as Van der Meer and Janssen prediction
for a specific significant wave height (Hs) and freeboard (Rc) of the structure. The values of the
reduction factors in the equation (3.5) were set as 1.0 as the model was smooth and
impermeable and overtopping rates were predicted for normal wave attack only.
3.4 Overtopping performance
Mean overtopping rates were measured for each model simulation in m3/s/m and converted
into full scale prototype mean overtopping rates using the equation (3.1). Mean overtopping
rates were predicted by Owen (1980) formulas using equation (3.2) and (3.3) and by Van der

30
Meer and Janssen (1995) formula using equation (3.5). Graphs were plotted for mean
overtopping rates against significant wave heights (Hs). Characteristics of the mean overtopping
against wave height and period has been evaluated and measured mean overtopping was
compared with overtopping predictions.
3.5 Performance comparison of oblique waves
Mean overtopping was measured for the composite seawall positions at 00, 150 and 300 angles
with the incoming wave attack in the 3-D wave basin. Measured mean overtopping rates (qM)
were plotted against significant wave heights (Hs) for different positions of the composite
seawall. Changes of the measured mean overtopping from normal wave approach to oblique
wave approach were evaluated carefully in the analysis.
3.6 Power performance
It was assumed that the water reservoir of the composite seawall always remains full during
operation. Power of the wave (PW) was determined by the equations given in the table 2.1.
Hydraulic power of the water collected over the crest (Pcr) of the composite seawall was
calculated by the following equation.
Pcr= qM Rc ρ g (3.6)
Where
qM= Measured mean overtopping rates in m3/s/m
Rc= Freeboard in m
ρ= Density of water in Kg/m3
g= Gravitational acceleration in m2/s
Hydraulic efficiency of the composite seawall was calculated by the following equation in
percentage.
Ηhyd= Pcr/PW ×100 % (3.7)

31
Hydraulic power generated and calculated hydraulic efficiencies were presented in the tables.
Graphs were plotted to evaluate hydraulic power generated and hydraulic efficiency of the
composite seawall against significant wave heights (Hs) for different freeboard conditions.
3.7 Performance optimisation against tidal variation
Composite seawall for wave energy conversion is suitable for such a place where there will be
waves of relatively high wave heights and tidal variation will be absent or negligible. However it
is very difficult to find such a place in the world oceans without or little tidal variation. The
smallest tidal ranges occur in the Mediterranean, Baltic and Caribbean Seas. Mediterranean Sea
has average tidal range of 0.3 m with maximum of about 1.0 m, which is nominal in the world
(Wikipedia, 2010). An analysis of performance optimisation of the composite seawall was done
against tidal variation of 1.0 m during neap tide and 2.0 m during spring tide.
3.8 Outlet designing
Uninterrupted passage of the overtopped water from the reservoir to the sea is very important
for smooth functioning of the HPW. Literature has been reviewed to look at the existing
drainage discharge outfall at the sea surface conditions to design a suitable outfall for the
composite seawall WEC. The initial design (conceptual) of the outfall was made in combination
with rouble mound breakwater and pile screen. Armor rock of the outfall was design like Rubble
mound breakwater following the Hudson formula (Kamphuis, 2002). The Hudson formula for
armor rock design is given below.
(3.8)
This conceptual design was built in the model to observe its performance of stabilizing water in
the area around outfall, which is shown in the figure 3.3. A weir was used in the model instead
of the HPW.

32
Figure 3.3: Model of the outfall
Simulations of the model gave swelling of the water level and its fluctuations in the outfall at
various wave periods and significant wave heights. The design was finalised based on the model
test results.
3.9 Observations
A Composite seawall for WEC has been modeled physically in the Hydraulic Laboratory of the
Southampton University. The physical model has been simulated to an imaginary prototype
condition and coastal characteristics. The model behaviors were closely and carefully observed
during simulations. The physical characteristics of the model simulations such as reflection,
refraction and shoaling of waves in the wave basin, impacts of the wave period and wave height
on the overtopping, types and patterns of overtopping, swelling of the water in the wave basin
due to oblique wave approaches, effects of the sides of the wave basin and length of the seawall
compared to the width of the basin, etc were observed during simulations and evaluated based
on the (imaginary) prototype situations.

33
Chapter IV
Results and Discussion
The 3-D physical model of the composite seawall for wave energy conversion has been validated
and tested in the hydraulic laboratory of the Southampton University. Model results are
converted into full scale prototype results in the presentable form, which are discussed in this
chapter.
4.1 Overtopping performance with normal waves
Realized wave parameters and measured mean overtopping rates and corresponding
predictions for normal wave approach are shown in the tables 4.1 to 4.4. Sample calculations
regarding wave parameters and overtopping rates are shown in the appendix I-II. There are
three realized sets of wave periods (around 4, 6 and 8 sec) and corresponding wave lengths
(around 25, 45 and 65 meters) for each freeboard conditions. The realized significant wave
height ranges from 0.5 meter to 2.5 meters. The wave generator and wave basin performed
good in producing desired wave parameters.
Table 4.1: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 9.5 m and Rc= 0.5 m
Wave period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Predicted mean overtopping rates by
Owen and Besley formulas (qOwen)
m3/sec/m
Predicted mean overtopping rates by
Van Der Meer formulas (qVDM)
m3/sec/m
7.52
64.3
0.5 0.091 0.2 0.031
0.6 0.196 0.261 0.049
1.05 0.327 0.604 0.2
5.62
43.4
0.5 0.107 0.11 0.031
0.75 0.227 0.204 0.086
1.15 0.333 0.387 0.251
4.16
26.2
0.65 0.119 0.09 0.060
0.95 0.224 0.159 0.156
1.3 0.356 0.255 0.342

34
Table 4.2: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 9.0 m and Rc= 1.0 m
Wave period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean overtopping rates
(qM) m3/sec/m
Predicted mean overtopping rates by
Owen and Besley formulas (qOwen)
m3/sec/m
Predicted mean overtopping rates by Van Der Meer formulas (qVDM)
m3/sec/m
7.54
63.3
0.5 0.028 0.1 0.016
0.9 0.117 0.241 0.068
1.05 0.195 0.304 0.1
5.87
45.5
0.7 0.044 0.1 0.036
0.95 0.085 0.158 0.078
1.2 0.202 0.225 0.14
4.26
27.4
0.85 0.058 0.071 0.059
1.2 0.161 0.11 0.14
1.65 0.345 0.191 0.31
Table 4.3: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 8.5 m and Rc= 1.5 m
Wave period (T) sec
Wave length (L) m
Sig. Wave Height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Predicted mean overtopping rates by
Owen and Besley formulas (qOwen)
m3/sec/m
Predicted mean overtopping rates by
Van Der Meer formulas (qVDM)
m3/sec/m
7.92
65.2
0.9 0.018 0.177 0.045
1.15 0.149 0.256 0.084
1.6 0.268 0.420 0.191
6.08
46.7
0.6 0 0.057 0.016
1 0.032 0.122 0.059
1.2 0.112 0.161 0.093
4.10
25.5
0.75 0.022 0.036 0.029
1.25 0.144 0.078 0.103
1.8 0.318 0.134 0.257

35
Table 4.4: Wave parameters and mean overtopping rates from model simulations and predictions for φ= 00, d= 8.0 m and Rc= 2.0 m
Wave period (T) sec
Wave length (L) m
Sig. Wave Height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Predicted mean overtopping rates by
Owen and Besley formulas (qOwen)
m3/sec/m
Predicted mean overtopping rates by
Van Der Meer formulas (qVDM)
m3/sec/m
7.35
58.1
1.4 0.027 0.222 0.103
1.8 0.134 0.324 0.193
2.15 0.275 0.423 0.3
6.15
46.6
1.35 0.016 0.147 0.094
1.75 0.08 0.217 0.18
2.1 0.218 0.286 0.283
3.96
23.7
1.1 0 0.045 0.056
1.9 0.15 0.102 0.221
2.5 0.365 0.154 0.438
Tables 4.1 to 4.4 give overtopping performance of the composite seawall, but it is difficult to
compare the results with predictions to get a generalized conclusion from such tables. Figures
4.1 to 4.3 show general trends of overtopping and validate suitability of the prediction formulas.
General trends of the figure 4.1 give idea that overtopping increases with increasing wave
heights, while it is decreasing with increasing freeboard. It is also notable that minimum wave
height is required for overtopping, which increases as the freeboard increases.
Figure 4.1: Measured overtopping with wave heights at different freeboard conditions

36
Figure 4.2 and 4.3 show the wide range of performance of the prediction formulas. Owen (1980)
prediction varies widely, which can be due to over emphasis given on wave period in the
equations (3.2-3.3). Van der Meer (1995) prediction seems to be more ordered and realistic,
although it ignores wave period in the prediction equation (3.5) of non-breaking and green type
of overtopping. It is notable (from table 4.1 to 4.4 and figure 4.2 to 4.3) that Owen (1980)
predicts relatively higher overtopping than the measured overtopping, whereas Van der Meer
(1995) predicts relatively lower overtopping than the measured overtopping.
Figure 4.2: Comparisons of measured overtopping with predictions (Freeboard 1.0 meter)
Figure 4.3: Comparisons of measured overtopping with predictions (Freeboard 1.5 meters)

37
4.2 Hydraulic performance with normal waves
Tables 4.5 to 4.8 show hydraulic performances of the composite seawall with realized wave
parameters and measured mean overtopping rates. Sample calculations of hydraulic
performances are given in the appendix III.
Table 4.5: Hydraulic performances for φ= 00, d= 9.5 m and Rc= 0.5 m
Time period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Wave power (Pw)
KW/m
Hydraulic power at crest (Pcr)
KW/m
Hydraulic efficiency
(Pcr/Pw)×100 in %
7.52
64.3
0.5 0.091 2.15 0.46 21.4
0.6 0.196 3.09 0.99 32
1.05 0.327 9.46 1.64 17.3
5.62
43.4
0.5 0.107 1.64 0.54 33
0.75 0.227 3.69 1.14 30.9
1.15 0.333 8.69 1.67 19.2
4.16
26.2
0.65 0.119 1.84 0.6 32.6
0.95 0.224 3.93 1.13 28.8
1.3 0.356 7.37 1.79 24.3
Table 4.6: Hydraulic performances for φ= 00, d= 9.0 m and Rc= 1.0 m
Time period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean
overtopping rates (qM) m3/sec/m
Wave power (Pw)
KW/m
Hydraulic power at crest (Pcr)
KW/m
Hydraulic efficiency
(Pcr/Pw)×100 in %
7.54
63.3
0.5 0.028 2.13 0.28 13.1
0.9 0.117 6.91 1.18 17.1
1.05 0.195 9.4 1.96 20.9
5.87
45.5
0.7 0.044 3.38 0.44 13
0.95 0.085 6.23 0.85 13.6
1.2 0.202 9.95 2.03 20.2
4.26
27.4
0.85 0.058 3.31 0.58 17.5
1.2 0.161 6.6 1.62 24.5
1.65 0.345 12.48 3.47 27.8

38
Table 4.7: Hydraulic performances for φ= 00, d= 8.5 m and Rc= 1.5 m
Time period (T) sec
Wave length (L) m
Sig. Wave Height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Wave power
(Pw) KW/m
Hydraulic power at crest (Pcr)
KW/m
Efficiency (Pcr/Pw)×100
in %
7.92
65.2
0.9 0.018 7.01 0.27 3.9
1.15 0.149 11.45 2.25 19.7
1.6 0.268 22.16 4.04 18.2
6.08
46.7
0.6 0 2.56 0 0
1 0.032 7.12 0.48 6.7
1.2 0.112 10.26 1.69 16.5
4.10
25.5
0.75 0.022 2.48 0.33 13.3
1.25 0.144 6.88 2.17 31.5
1.8 0.318 14.27 4.8 33.6
Table 4.8: Hydraulic performances for φ= 00, d= 8.0 m and Rc= 2.0 m
Time period (T) sec
Wave length (L) m
Sig. Wave Height (Hs) m
Measured mean overtopping
rates (qM) m3/sec/m
Wave power (Pw)
KW/m
Hydraulic power at crest (Pcr)
KW/m
Efficiency (Pcr/Pw)×100
in %
7.35
58.1
1.4 0.027 16.02 0.54 3.4
1.8 0.134 26.48 2.7 10.2
2.15 0.275 37.79 5.53 14.6
6.15
46.6
1.35 0.016 13.1 0.32 2.5
1.75 0.08 22.02 1.61 7.3
2.1 0.218 31.7 4.38 13.8
3.96
23.7
1.1 0 5.12 0 0
1.9 0.15 15.27 3.02 19.8
2.5 0.365 26.44 7.34 27.8
The measured maximum hydraulic efficiency of the composite seawall is 33.6 % (from table 4.7).
Average hydraulic efficiencies are about 26.6%, 18.6%, 15.9% and 11.1% for the freeboard of
0.5m, 1.0m, 1.5m and 2.0m respectively.
Figure 4.4 shows the general trends of the realized hydraulic power at the crest. It shows that
hydraulic power increases with increasing wave heights and decreases with increasing
freeboard. Minimum wave heights required for hydraulic power generation are about 0.4m,
0.6m, 0.8m and 1.2m for freeboard 0.5m, 1.0m, 1.5m and 2.0m respectively.

39
Figure 4.4: Hydraulic performance at significant wave height Figure 4.5 shows that hydraulic efficiency decreases with increasing wave heights in case of
freeboard 0.5m, while hydraulic efficiency increases with increasing wave heights in case of
others freeboards. General trend of the hydraulic efficiency is that it decreases with increasing
freeboards. Hydraulic efficiencies at 1.0 m and 1.5 m freeboards are more ordered and
consistent than that at other freeboards.
Figure 4.5: Hydraulic efficiency of the seawall at significant wave heights

40
4.3 Overtopping performance at oblique waves
Measured mean overtopping at 00, 150 and 300 angles of wave approach to the composite
seawall are shown in the table 4.9 for the freeboard of 1.0m and 1.5m. From the model results,
overtopping clearly depends on freeboards, wave periods and significant wave heights.
Table 4.9: Measured mean overtopping at different wave attack angles
Fre
ebo
ard
, m
Normal waves Waves at angle 15 deg. Waves at angle 30 deg.
Wav
e p
erio
d, s
ec
Sign
ific
ant
wav
e
he
igh
t, m
Me
asu
red
mea
n
ove
rto
pp
ing
rate
s,
qM
, m3 /s
ec/m
Wav
e p
erio
d, s
ec
Sign
ific
ant
wav
e
he
igh
t, m
Me
asu
red
mea
n
ove
rto
pp
ing
rate
s,
qM
, m3 /s
ec/m
Wav
e p
erio
d, s
ec
Sign
ific
ant
wav
e
he
igh
t, m
Me
asu
red
mea
n
ove
rto
pp
ing
rate
s,
qM
, m3 /s
ec/m
1.0
7.54
0.5 0.028 7.76
0.8 0.025 7.74
0.85 0.114
0.9 0.117 1.25 0.127 1.15 0.216
1.05 0.195 1.65 0.24 1.4 0.356
5.87
0.7 0.044 5.92
1.25 0.032 6.02
1 0.082
0.95 0.085 1.5 0.116 1.4 0.229
1.2 0.202 1.75 0.224 1.8 0.408
4.26
0.85 0.058 3.91
1.3 0.057 4.0
1.4 0.16
1.2 0.161 1.9 0.283 1.95 0.356
1.65 0.345 2.5 0.475 2.4 0.516
1.5
7.92
0.9 0.018 7.76
1.1 0.045 7.74
0.9 0.095
1.15 0.149 1.5 0.134 1.25 0.197
1.6 0.268 1.9 0.336 1.6 0.349
6.08
0.6 0 5.80
1.25 0 6.17
1.15 0.056
1 0.032 1.5 0.06 1.6 0.127
1.2 0.112 2 0.165 1.9 0.247
4.10
0.75 0.022 3.91
1.75 0.067 3.91
1.7 0.101
1.25 0.144 2.3 0.356 2.25 0.314
1.8 0.318 2.75 0.756 2.65 0.553
Van der Meer (1995) shows that overtopping decreases as the angle of wave approach increases
and incorporates a reduction factor for oblique waves in the prediction formula. However, it is
shown that effects of oblique waves are nominal up to 300 angle of approach and sets reduction
factor as 1.0.
41
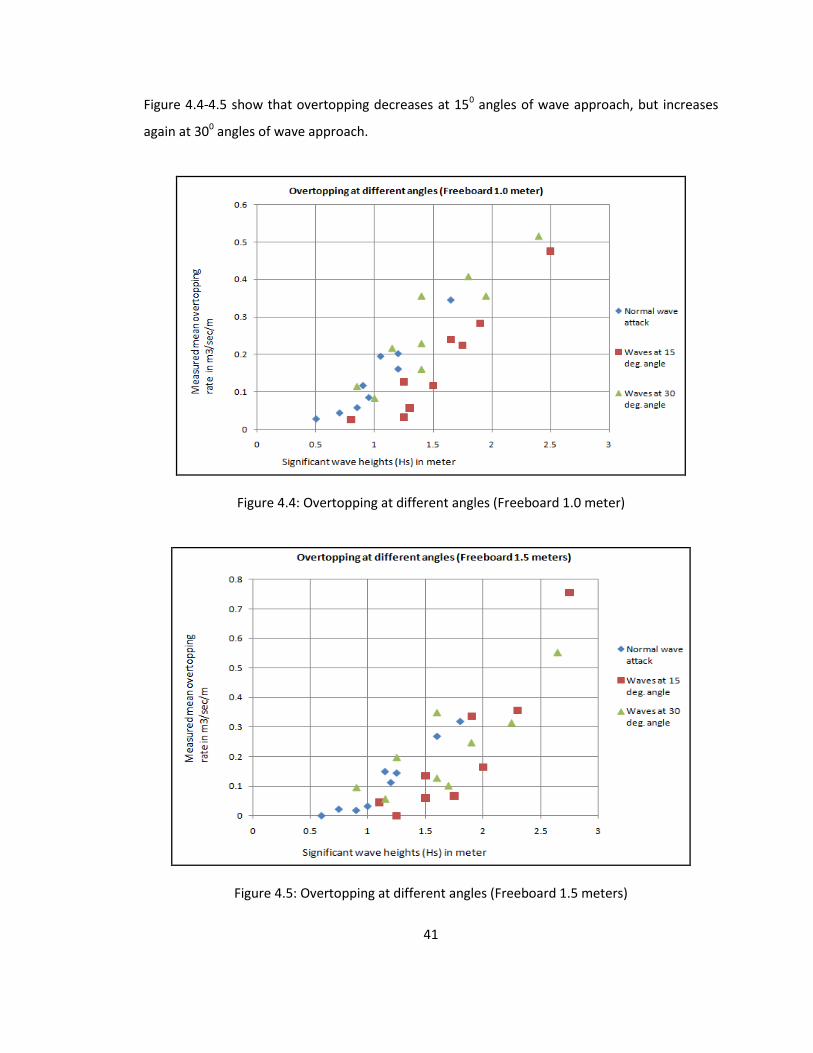
Figure 4.4-4.5 show that overtopping decreases at 150 angles of wave approach, but increases
again at 300 angles of wave approach.
Figure 4.4: Overtopping at different angles (Freeboard 1.0 meter)
Figure 4.5: Overtopping at different angles (Freeboard 1.5 meters)

42
Overtopping depend not only significant wave heights and angles of wave approach, but also on
the wave periods (Figure 4.6). Higher wave period increases overtopping. Owen (1980) includes
wave period in the prediction calculation (but seem to be over emphasized) and Van der Meer
(1995) ignores wave period in non-breaking wave overtopping prediction. This is a reason of
wide variations of performances of the overtopping prediction formulas (figure 4.2-4.3).
Figure 4.6: Wave period dependence of overtopping (Freeboard 1.5 meters) 4.4 Hydraulic performance at oblique waves
Hydraulic performances of the composite seawall at 00, 150 and 300 angles of wave approach are
given in the tables 4.10 to 4.12. Hydraulic performances are presented here for 1.0m and 1.5m
freeboards in order to look at the differences at different angles of wave approach. Maximum
hydraulic efficiencies are measured about 36.5 %, 33.6% and 28.8% at 150, 00 and 300 angle of
wave attack respectively.

43
Table 4.10: Hydraulic performance of the composite seawall for φ= 00.
Free board
(Rc) m
Time period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean
overtopping rates (qM) m3/sec/m
Wave power (Pw)
KW/m
Hydraulic power at crest (Pcr)
KW/m
Hydraulic efficiency
(Pcr/Pw)×100 in %
1.0 (d=9.0m)
7.54
63.3
0.5 0.028 2.13 0.28 13.1
0.9 0.117 6.91 1.18 17.1
1.05 0.195 9.4 1.96 20.9
5.87
45.5
0.7 0.044 3.38 0.44 13
0.95 0.085 6.23 0.85 13.6
1.2 0.202 9.95 2.03 20.2
4.26
27.4
0.85 0.058 3.31 0.58 17.5
1.2 0.161 6.6 1.62 24.5
1.65 0.345 12.48 3.47 27.8
1.5 (d=8.5m)
7.92
65.2
0.9 0.018 7.01 0.27 3.9
1.15 0.149 11.45 2.25 19.7
1.6 0.268 22.16 4.04 18.2
6.08
46.7
0.6 0 2.56 0 0
1 0.032 7.12 0.48 6.7
1.2 0.112 10.26 1.69 16.5
4.10
25.5
0.75 0.022 2.48 0.33 13.3
1.25 0.144 6.88 2.17 31.5
1.8 0.318 14.27 4.8 33.6

44
Table 4.11: Hydraulic performance of the composite seawall for φ= 150
Free board
(Rc) m
Time period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean
overtopping rates (qM) m3/sec/m
Wave power
(Pw) KW/m
Hydraulic power at crest (Pcr)
KW/m
Hydraulic efficiency
(Pcr/Pw)×100 in %
1.0 (d=9.0m)
7.76
65.6
0.8 0.025 5.56 0.25 4.5
1.25 0.127 13.57 1.28 9.4
1.65 0.24 23.65 2.41 10.2
5.92
46.1
1.25 0.032 10.9 0.32 2.9
1.5 0.116 15.7 1.17 7.5
1.75 0.224 21.36 2.25 10.5
3.91
23.8
1.3 0.057 6.95 0.57 8.2
1.9 0.283 14.84 2.85 19.2
2.5 0.475 25.7 4.78 18.6
1.5 (d=8.5m)
7.76
64.2
1.1 0.045 10.4 0.68 6.5
1.5 0.134 19.33 2.02 10.5
1.9 0.336 31.02 5.07 16.3
5.80
44
1.25 0 10.67 0 0
1.5 0.06 15.37 0.91 5.9
2 0.165 27.32 2.49 9.1
3.91
23.5
1.75 0.067 12.65 1.01 8
2.3 0.356 21.86 5.37 24.6
2.75 0.756 31.25 11.4 36.5

45
Table 4.12: Hydraulic performance of the composite seawall for φ= 300
Free board
(Rc) m
Time period (T) sec
Wave length (L) m
Sig. Wave height (Hs) m
Measured mean
overtopping rates (qM) m3/sec/m
Wave power
(Pw) KW/m
Hydraulic power at crest (Pcr)
KW/m
Hydraulic efficiency
(Pcr/Pw)×100 in %
1.0 (d=9.0m)
7.74
65.6
0.85 0.114 6.28 1.15 18.3
1.15 0.216 11.49 2.18 19
1.4 0.356 17.03 3.58 21
6.02
47.2
1 0.082 7.09 0.82 11.6
1.4 0.229 13.9 2.31 16.6
1.8 0.408 23 4.1 17.8
4.0
24.6
1.4 0.16 8.26 1.61 19.5
1.95 0.356 16.03 3.58 22.3
2.4 0.516 24.28 5.19 21.4
1.5 (d=8.5m)
7.74
63.8
0.9 0.095 6.94 1.43 20.6
1.25 0.197 13.38 2.97 22.2
1.6 0.349 21.93 5.26 24
6.17
47.8
1.15 0.056 9.57 0.84 8.8
1.6 0.127 18.53 1.92 10.4
1.9 0.247 26.13 3.73 14.3
3.91
23.4
1.7 0.101 11.9 1.52 12.8
2.25 0.314 20.85 4.74 22.7
2.65 0.553 28.92 8.34 28.8
Figure 4.7-4.8 show the hydraulic power generated at the crest of the seawall at different angles
of wave approach for freeboards 1.0 m and 1.5 m. Hydraulic power increases with the increasing
wave heights in both freeboards. Hydraulic power generated decreases at 150 angle of wave
approach, but increases at 300 angle of wave approach. The data of the hydraulic power at 300
angle of wave approach are more scattering and this scattering is increased at 1.5 m freeboard
(figure 4.8).

46
Figure 4.7: Hydraulic power at different angles (Freeboard 1.0 meter)
Figure 4.8: Hydraulic power at different angles (Freeboard 1.5 meters)

47
Figures 4.9-4.10 are graphical presentations of the realized hydraulic efficiencies at various
significant wave heights of 00, 150 and 300 angles of wave attack for freeboards 1.0m and 1.5m.
These two graphs are rather more scattered, but the general trend is that hydraulic efficiency
decreases with increasing angle of wave approach.
Figure 4.9: Hydraulic efficiency at different angles (Freeboard 1.0 meter)
Figure 4.10: Hydraulic efficiency at different angles (Freeboard 1.5 meters)

48
4.5 Performance optimization with tidal variations
Tidal variations are very important for performance measurements of composite seawall of
WEC. Higher water level during high tide increases hydraulic (overtopping) performance while it
reduces effective hydraulic head, meaning that it reduces energy production. During high tide, if
water level reaches at the crest of the ramp (meaning freeboard becomes zero), overtopping is
maximum, but there is no energy production because it does not generate hydraulic head.
Similarly during low tide, increased freeboard reduces overtopping. If overtopping is sufficient to
keep the water reservoir full, then it increases energy production due to increased hydraulic
head. But after certain freeboard increased, energy production reduces due to insufficient
hydraulic head caused by insufficient overtopping. Hence it can be concluded that this type of
composite seawall for WECs is especially suitable for the places in which tidal ranges are very
low (about 1.0 m or less), compared with the significant wave heights.
An analysis of performance optimisation of the composite seawall is made against tidal
variations of 1.0 m during neap tide and 2.0 m during spring tide based on the following
conditions. Results of the analysis are shown in the table 4.13.
Considering tidal range= 2 m (during spring tide) and tidal range =1 m (during neap tide) Tidal period =12 hours 25.2 minutes =12.42 hours Flood tidal period=6.21 hours Ebb tidal period=6.21 hours Average range of the significant wave height = 0.5 m to 2.5 m Angle of wave attack generally remains normal to the structure. Considering mean water level (MWL) at 0.0 meter, this means 1.0 meter free board. Different stages of tidal variations are as follows. Freeboard = 0.0 meter during Higher High Water Level (HHWL) Freeboard = 0.5 meter during High Water Level (HWL) Freeboard = 1.0 meter during Mean Water Level (MWL) Freeboard = 1.5 meter during Low Water Level (LWL) Free board =2.0 meter during Lower Low Water Level (LLWL)

49
Table 4.13: Performance optimization against tidal variations
Wat
er
leve
l
Fre
ebo
ard
(R
c), m
Ave
rage
sig
. w
ave
hei
ght
(Hs)
, m
Rat
io,
(Hs/
Rc)
Ave
rage
mea
sure
d
ove
rto
pp
ing
rate
,
(q M
), m
3 /sec
/m
Ave
rage
Hyd
rau
lic
po
wer
at
cres
t.
(Pcr
), K
W/m
Ave
rage
Hyd
rau
lic
effi
cien
cy, i
n %
HHWL 0 - - - - -
HWL 0.5 0.76 1.52 0.216 1.11 26.6
MWL 1.0 1.0 1.0 0.109 1.38 18.6
LWL 1.5 1.1 0.73 0.097 1.78 15.9
LLWL 2.0 1.78 0.89 0.101 2.83 11.1
Average overtopping rate during neap tide= 0.128 m3/sec/m Average hydraulic power during neap tide = 1.41 KW/m Average annual power production (for given wave climate and tidal range) = 12.35 MWh/m Average hydraulic efficiency during neap tide= 19.7 % Average hydraulic performances of the composite seawall against the average ratio of the
significant wave height and freeboard (Hs/Rc) are shown in the figure 4.11. Overtopping
increases with increasing ratio, while achievable hydraulic power at crest decreases. Optimized
overtopping and hydraulic power at the crest level are found at the ratio of about 0.75.
Hydraulic efficiency increases with the increasing the ratio with a maximum of about 27%.
Figure 4.11: Hydraulic performance with Hs/Rc ratios

50
4.6 Outfall design
Reservoir of composite seawall collects water from wave overtopping and creates hydraulic
head. HPW converts this head into power and release the collected water. The released water
needs a suitable outfall to return to the sea. Main design purposes are to protect the outfall
from wave action and maximize energy production. Three types of outfalls can be considered in
these purposes.
Submarine outfall: Pipe outfall can be placed at deepwater, which will be free from wave
motion. As outfall will be free from wave action, it will provide calm water level inside the pipe
and hence it will maximize the power production (figure 2.12). Submarine outfall could be costly
to install and mouth of the outfall is subject to siltation and hence regular maintenance could be
required. Frictional losses could be involved due to pipe length. Costs of installation and
maintenance and frictional losses can be reduced by optimizing the length of the pipe and depth
of water against wave effects.
Sub-surface outfall: Passage of water will be controlled by a flushing gate at the sub-surface
outfall. This outfall will allow one way passage of water. This gate becomes open during
recession of wave (at trough) and remains close when wave hits (at crest) on the gate. The gate
is widely used to prevent saline water intrusion during high tide into agricultural field (figure
2.13). It could be very efficient and less costly for composite seawall. But, tidal cycle is about
12.5 hours whereas wave cycle is a matter of few seconds. Hence, main disadvantages could be
wear and abrasion, which requires regular maintenances like greasing of the moving parts.
Wave breaker screen: A screen of vertical pile can be installed in front of the surface outfall.
Vertical piles can be supported by armor rocks in front of it like breakwaters. There should be
gap between vertical piles and outfall for easy release of the discharge. This type of outfall will
be easy for construction and maintenance and relatively cheap. Outfall discharge will be
affected by flow of water, when wave crest hits the screen and hence energy production may be
disrupted and reduced.

51
An initial design of this type of outfall has been done in the project. Model of the designed
outfall was built and tested in the wave basin (figure 3.3). Results of the model test simulations
(converted into prototype results) are shown in the table 4.14.
Table 4.14: Realized test results of the designed outfall
Free board
(m)
Wave period, Tm,
(sec)
Sig. wave height, Hs,
(m)
Swelling of water level at the outfall, (m)
Decrease of the hydraulic
head, %
Fluctuation range of the water level at the outfall, (m)
1.0
7.71
1.0 0.025 2.5 0.15
1.25 0.05 5 0.2
5.73
2.0 0.1 10 0.3
2.5 0.125 12.5 0.35
3.96
1.5 0.05 5 0.15
2.25 0.1 10 0.3
1.5
8.0
0.75 0.025 1.7 0.15
1.25 0.05 3.3 0.2
6.01
1.5 0.125 8.3 0.3
2.25 0.175 11.7 0.35
4.03
0.5 0.05 3.3 0.2
1.25 0.1 6.7 0.3
Table 4.14 shows that the designed wave breaker screen decreases effective hydraulic head of
the composite seawall up to 12.5%. Fluctuation range of the water level at the outfall of the
composite seawall becomes up to 35 cm. Swelling of the water level at the outfall due to water
discharge and wave action reaches up to 17.5 cm above MWL. Higher wave heights create
higher swelling and water level fluctuation range.
It could be concluded based on the model test results shown in the table 4.14 that the design
wave breaker screen is effective and suitable for composite seawall WEC. Detail calculations of
the wave breaker screen design are shown in the appendix-IV. Armor rocks are designed
following rubble mound breakwater design (Hudson formula) methods (Kamphuis, 2002). A
sketch of the designed outfall layout is shown in the appendix- V.

52
4.7 Simple experimental observations
The interactions between waves and the structure have been carefully observed during the
simulation experiments. The water depth in the wave basin was neither shallow nor deep
considering wave parameters. Overtopping was green type and non-breaking and it was not
uniformly distributed over the length of the ramp, especially in case of oblique wave
approaches.
Wave-structure interactions: Wave shoaling occurs on the slope of the structure and wave
reflection on the ramp of the composite seawall creates reflected waves while overtopping over
the ramp. Reflected waves interact with the incoming waves and generate standing waves.
Properties of the standing waves (either perfect or imperfect) depend on the wave periods and
position of the composite seawall with respect to incoming waves. After 4-5 cycles of wave (as
distance between wave peddle and ramp of the seawall is about 2.0 m), the reflected waves
again reflect on the wave peddle and thus the whole wave basin becomes fully random.
Sloshing: While overtopping of the waves over the ramp and water enters into the reservoir,
sloshing of the reservoir water occurs. Relatively higher waves reflect on the vertical seawall
behind the ramp after overtopping, which generates irregular movement of the reservoir water.
This reflection causes spilling of the reservoir water back into the wave basin, especially when
reservoir is full.
Funnelling effects: Positions of the composite seawall in the wave basin are set at angles of 00,
150 and 300 with the incoming waves. Oblique positions of the composite seawall along with the
side of the wave basin look like a funnel shape. Waves converge in this funnel shape portion and
create swelling of the water surface, which increases wave height in the narrow portion of the
wave basin (figure 4.12). This funnelling effect becomes very important in overtopping and it
causes bulk overtopping at the corner of the composite seawall. Oblique wave approach
normally reduces overtopping in the real sea state, while funnelling effect increases overtopping
in the 3-D physical model. These effects become vivid at 300 angle of wave approach and are the
main cause of increasing overtopping performance and hydraulic power performance of the
composite seawall, while it should be decreasing (figure 4.4-4.5 and figure 4.7-4.8).
The funnelling effect occurs because of errors in model set up; length of the composite seawall
(1.2 m long) is very large compared to the width of the wave basin (1.5 m wide). Although the
model is set for 3-D conditions, it seems acting as 2-D model and producing funnelling effects.

53
To reflect the 3-D physical modelling of a real sea state condition, the length of the composite
seawall should be smaller than the used one. Because of that there is no barrier like sides of the
wave basin in real sea state and hence oblique waves do not create funnelling effects in the real
sea state conditions.
Figure 4.12: Funnelling effect at oblique waves of 300 4.8 Market potential of composite seawall for WECs
Ocean wave energy is an important source of renewable energy. Rapid depletion of fossil fuel
and increasing concern of environmental consequences has forced world community to develop
suitable techniques to extract renewable energy in a cost effective way. Although considerable
improvement has been made during last decades, renewable energies are not ready yet to
compete with other conventional energies.
Composite seawall for WECs can be developed as a dual purpose structure, for both sea
defenses and energy production. It cannot compete in the energy market alone with fossil fuel
due to high production costs and low conversion efficiencies (about 15-20%). However, it can be
cost effective only if it is considered as byproduct of the seawall. Composite seawall for WECs
could be suitable in such a remote place (usually Islands), where conventional energy supply
would be highly expensive and nearly impossible.

54
Chapter V
Conclusion
5.1 Conclusions
From analysis of the model simulation results, the following conclusions can be made:
Overtopping Prediction formulas (Owen (1980) and Van der Meer (1995)) are widely
varying in predictions. However, Van der Meer (1995) is found more ordered and
relatively good than Owen (1980) in predictions.
Maximum hydraulic efficiency of the composite seawall is about 37 %. Average hydraulic
efficiencies are about 26.6%, 18.6%, 15.9% and 11.1% for the freeboard of 0.5m, 1.0m,
1.5m and 2.0m respectively. Hydraulic power (generated at the crest of the ramp)
increases with increasing wave heights and decreases with increasing freeboard.
Minimum wave heights required for hydraulic power generation are about 0.4 m, 0.6 m,
0.8 m and 1.2 m for freeboard 0.5 m, 1.0 m, 1.5 m and 2.0 m respectively. Hydraulic
efficiencies at 1.0 m and 1.5 m freeboards are more ordered and consistent than that at
other freeboards for given Mediterranean Sea climatic conditions.
Both overtopping and generated hydraulic power decrease at oblique waves. Maximum
hydraulic efficiencies are measured about 33.6%, 36.5% and 28.8% at 00, 150 and 300
angle of wave attack respectively.
Average hydraulic efficiency of a composite seawall (having 1.0 m freeboard) is about
20% in case of 1.0 m tidal variation. Composite seawall for WECs is not suitable for high
tidal variations and low wave heights. Average annual power production of composite
seawall in Mediterranean Sea climatic conditions is about 12.35 MWh per meter of
seawall width.

55
Hydraulic efficiency of the composite seawall increases with increasing the ratio of wave
height and freeboard (Hs/Rc), while achievable hydraulic power at crest decreases.
Optimized overtopping and hydraulic power at the crest level are found at the ratio of
about 0.75.
Wave breaker screen (which is designed and model) is found suitable at the outfall.
However, wave breaker screen decreases hydraulic head of the composite seawall up to
12.5%.
5.2 Further study
Further study is proposed by repeating the 3-D physical model experiments with a
shorter composite seawall compared to the width of the wave basin. Shorter composite
seawall for WECs might avoid funnelling effects in the model study and might give more
reliable performance prediction for oblique wave approaches.
A composite seawall for WECs can be built as a case study based on the model study
results. Prototype study results might give actual energy production potentiality of this
type of coastal structure.

56
References
ACU-GATE, (2003), Grade water management systems: http://www.grandeinc.com/ACU-
GATE%20Page.htm, date accessed 12/05/2010
BWDB, (1988), Standard design manual, Vol.-1: Standard design criteria, Standard design
manual committee, Bangladesh Water Development Board, Office of the Chief Engineer
(Design), BWDB, Dhaka
Besley, P., (1999), Wave overtopping of seawalls: design and assessment manual, Hydraulics
Research Wallingford, R &D Technical Report, W178, ISBN 1 85705 069 X
Canning, A., (2009), Investigation into the use of composite seawalls for power generation and
energy dissipation in extreme conditions, School of Civil Engineering and the Environment,
University of Southampton
Chaplin, J., (2009), Notes on linear wave theory and wave transformations, lecture notes, School
of Civil Engineering and the Environment, University of Southampton
Dalrymple, R.A., (1985), Introduction to physical models in coastal engineering, in physical
modeling in coastal engineering, edited by Dalrymple R.A., pp.3-9
Elmosa, (1989), Seawater intake systems and sea outfalls: http://www.amecosys.com/elmosa/,
date accessed 12/05/2010
EurOtop, (2007), Wave overtopping of sea defences and related structures: assessment manual,
Environmental Agency, UK: www.overtopping-manual.com, date accessed 15/03/2010
Energy resources, (2010), Wave power: http://home.clara.net/darvill/altenerg/wave.htm, date
accessed 18/02/2010

57
Hughes, S.A. (1993), Physical models and laboratory techniques in coastal engineering, World
Scientific, Singapore, 1993
HR Wallingford, (2010), Wave overtopping calculation tool: http://www.overtopping-
manual.com/calculation_tool.html, date accessed 03/02/2010
Kumer, P.R.D. and Sarma, R.V., (1990), Physical oceanographic investigation procedure for a sea
outfall project, A paper presented at all India seminar on “Sea Outfalls”, September 1990
Kamphuis, J.W., (2002), Introduction to Coastal Engineering and Management, World Scientific,
Singapore
Kane, M., (2005), California small hydropower and ocean wave energy resources, staff paper
presented at California Energy Commission, Sacramento, California, May 2005.
Kofoed, J. P., (2005), Model testing of the wave energy converter Sea wave Slot-Cone Generator,
Hydraulics and Coastal Engineering No. 18, ISSN: 1603-9874, Dept. of Civil Eng., Aalborg
University, 2005
Kortenhaus, A., Van der Meer, J., Burcharth, H.F., Geeraerts, J., Pullen, T., Ingram, D., and Troch,
P., (2005), CLASH workpakage 7: Quantification of measurement errors: model and scale effects
related to wave overtopping, Leichtweib Institute for Hydraulics, Germany
Le Mehaute B., (1976), Similitude in coastal engineering, Journal of the waterways, harbors and
coastal engineering division, 102, WW3, pp.317-335
Ludwig, R.G., (1988), Environmental Impact Assessment: Siting and design of submarine outfalls,
Rio de Jenerio, 1988
Leonard energy, (2007), Energy technology: sea slot-cone generator: http://www.leonardo-
energy.org/seawave-slot-cone-generator-ssg, date accessed 22/04/2010

58
Mori, M., Yamamoto, Y. and Kimura, K., (2008), Wave force and stability of upright section of
high mound composite seawall, ICCE, Hamburg, September 2008.
Maravelakis, N., (2009), Experimental investigation of a novel composite seawall for wave
energy conversion, School of Civil Engineering and the Environment, University of Southampton,
October, 2009
Muller, G., Canning, A., Magagna, D., Stagonas, D., Warbrick, D., (2009), Composite seawalls for
wave energy conversion, School of Civil Engineering and the Environment, University of
Southampton, 2009
Muller, G., (2009), Notes on Maritime Energy and Coastal Engineering, Lecture presentations,
School of Civil Engineering and the Environment, University of Southampton, 2009
OCS, (2010), OCS Alternative Energy and Alternate Use Programmatic EIS:
http://ocsenergy.anl.gov/guide/wave/index.cfm, date accessed 03/02/2010
Pelamis wave power, (2010), http://www.pelamiswave.com/, date accessed 22/05/2010
Rise, (2008), Wave power: http://www.rise.org.au/info/Tech/wave/index.html, date accessed
18/02/2010
Svendsen, I.A., (1985), Physical modeling of water waves, in physical modeling in coastal
engineering, edited by Dalrymple R.A., pp.13-47
Soliman, A., (2003), Numerical study of irregular wave overtopping and overflow, PhD thesis,
School of Civil Engineering, University of Nottingham, November 2003
Steinhardt, J. and Hommer, B., (2006), Basics of hydro-self flushing system in rectangular tanks,
round tanks and tunnel sewers, Taunusstuin, Germany, September 2006

59
Troch, P., Geeraerts, J., Walle, B.V., Rouck, J.D., Damme, L.V., Allsop, W., and Franco, L., (2004),
Full-scale overtopping measurements on the Zeebrugge rubble mound breakwater, Journal of
Coastal Engineering, Vol: 51 (2004) P. 609-628, June 2004
Van der Meer, J.W., (1993), Conceptual design of rubble mound breakwaters, The Netherlands
Van der Meer, J.W. and others, (2002), Technical report: wave run-up and wave overtopping at
dikes, Technical advisory committee on flood defence, Delft, May 2002
Wave dragon, (2005), Wave dragon technology: www.wavedragon.net, date accessed
24/03/2010
Wave energy, (2005), Technology: http://www.waveenergy.no/WorkingPrinciple.htm, date
accessed 22/04/2010
Wikipedia, (2010), Wave power: http://en.wikipedia.org/wiki/Wave_power, date accessed
18/02/2010
Wikipedia, (2010), Mediterranean Sea: http://en.wikipedia.org/wiki/Mediterranean_Sea and
http://en.wikipedia.org/wiki/Tidal_range, date accessed 27/05/2010

60
Appendix I Sample calculations of wave analysis and overtopping Angle = 0 deg., Freeboard 10mm (0.5 m in prototype) Deep water depth= 190 mm (9.5 m in prototype) Shallow water depth= 135 mm (6.75 m in prototype) Both depths are compared with d/L ratio, and both are found transitional water depths. Significant wave height and wave period are collected from simulations results using Excel spreadsheets. Definition of significant wave height is followed in the wave analysis. Wave height and wave period are converted into full scale prototype. Wave height in model = 10 mm (Measured from Excel spreadsheet results of the model simulation) Hence, wave height in prototype = 10×50/1000 m =0.5 m (Geometric scale 1:50) Wave period in model =1.064 sec (Measured from Excel spreadsheet results of the model simulation) Hence, wave period in prototype= 1.064×7.07 sec =7.52 sec (Time scale 1:7.07) Wave length is measured by trial and error method from the following equation (table 2.1) of the transitional water depth.
Hence, Wave length (L) in prototype for T=7.52 sec and d= 9.5 meter is 64.3 m Water depth is checked by d/L ratio and it is transitional water depth. Surface area of the water reservoir in the seawall = 1200×160 mm2= 0.192 m2
Collected water in the model =0.00132 m3 (for T=1.064 sec and Hdeep= 10 mm in the model simulation) No of cycles in each simulation = 4 Simulation time = 4×1.064=4.256 sec (Model) Simulation time = 4.256×7.07 =30.09 sec (Prototype) Measured overtopping rate in the model =0.00132/ (1.064×4)/1.2= 0.000258 m3/s/m (Length of the model is 1.2 meters) Collected water in prototype (Measured mean overtopping rate) qM= 0.00132×125000/30.09=3.905 m3/sec =0.091 m3/sec/m (Volumetric scale= 1:125000, Length of the prototype = 60 m) Using equation 3.1, qM= 0.000258×501.5= 0.091 m3/s/m

61
Appendix II
Sample prediction calculations of overtopping Owen and Besley predictions Owen (1980) overtopping formula reads (Equations 3.2 and 3.3):
Which is valid only when
Slope of the structure = 1:1.75 From table 3.2, ao=0.009115, b0=20.75 (By linear interpolation) Smooth seabed, уr =1.0 When Freeboard, Rc= 0.5 m and Time period, Tm=7.52 sec, Significant wave height, Hs= 0.5 m (These values are taken from model simulations) g= 9.81 m2/sec R*=0.03, (This is within the range of 0.05 and 0.30) (equation 3.3) Putting these values in the prediction equation (3.2) Hence, predicted overtopping rate, qOwen = 0.2 m3/sec/m Van Der Meer predictions Non-breaking and green type of overtopping occurs in the model simulations (from observations). Therefore, maximum overtopping rate is calculated from the following equation (3.5):
Freeboard, Rc = 0.5 m
Significant wave height, Hm0 = 0.5 m (from model simulation) g =9.81 m2/sec Surface roughness factor, Yf=1.0 (smooth seabed) Factor for oblique wave attack, yβ=1.0 (normal wave attack) Putting these values in the equation (3.5) Predicted overtopping rate, qVDM=0.036 m3/s/m
Slope of the seawall
Values of ao
Values of bo
1:1 0.00794 20.1
1:1.5 0.00884 19.9
1:2 0.00939 21.6
1:2.5 0.0103 24.5
1:3 0.0109 28.7
1:3.5 0.0112 34.1
1:4 0.0116 41.0

62
Appendix III
Sample calculations of hydraulic performance Angle = 0 deg., Freeboard 10mm (0.5 m in prototype) Deep water depth= 190 mm (9.5 m in prototype) Wave length is measured by trial and error method from the following equation (table 2.1) of the transitional water depth.
Hence, Wave length (L) in prototype for T=7.52 sec and d= 9.5 meter is 64.3 m Hence, d/L= 9.5/64.3 =0.148, Water depth is checked by d/L ratio and it is transitional water depth. Celerity of the corresponding wave is determined by the following equation (table 2.1)
C= 8.56 m/sec Group velocity is determined by the following equation (table 2.1)
n= 0.797 Cg= 0.797×8.56 =6.83 m/sec Energy density is determined (table 2.1) by E=ρgH2/8 Sea water density ρ=1025kg/m3 Gravitational acceleration g=9.81 m2/sec Wave height H= 0.5 meter Hence, wave power Pw= ECg= Cg× ρgH2/8 =6.83×1025×9.81×0.52/8 =2146 Watt/meter of width So, Pw= 2.15 KW/m Measured mean overtopping rate, qM= 0.091 m3/sec/m. Hydraulic power related to wave height at crest, Pcr= qM Rc ρg=0.091×0.5×1025×9.81/1000=0.46 KW/m (equation 3.6) Therefore, Hydraulic efficiency of the seawall= 0.46/2.15 ×100= 21.4%

63
Appendix-IV
Sample calculations of outfall design: Wave breaker screen
Considering design wave height = 3.0m
And considering design storm wave height= 4.0m (for armor rock design only)
Height of the vertical piles= 3.0m above MWL
Length of the vertical pile screen = 5.0m
Diameter of pile = 0.4m
Gap between two piles= 0.2m
No of piles required = 8
Width of the outfall mouth= 1.0m, centrally position behind the pile screen
Height of the outfall mouth = 1.0m above MWL
Gap between pile screen and outfall mouth= 1.0m
Primary armor layer: Two layers of rock armor on the slope in front of the vertical pile screen
Slope of the armor layer=1:2
Density of seawater =1025 kg/m3
Density of the rock= 2650 kg/m3
Damage co-efficient for quarry rock= 4.0
Mass of the primary armor rock (following Hudson formula):
Ma= 5320 kg= 5 tons
Diameter of the primary rock armor= 0.8m
Thickness of the primary rock armor layer=1.6m
Primary armor rock will be placed up to 3.0m below LLWL
Width of the armor layers= 5.0m
Filter layer: Two layers of rock beneath the primary armor layers
Mass of filter rock (Ma/10) = 0.5 tons
Diameter of the filter rock = 0.1m
Thickness of the filter rock layer=0.2m

64
Appendix V
Sketch of the designed outfall: Wave breaker screen A
Composite seawall for WEC HPW Seawall CCo weir/gate Ramp Wave overtopping Piles and armor rocks A Plan and top view of the outfall Pile (round) arrangement (Pile dia @0.4m and gap 0.2m)
3.0 m above MWL
Primary armor
3.0 m 1.0m
5.0 m MWL
LLWL 1.0m weir/ gate
Filter layer
1:2
Cross-section of the outfall (Section A-A)