bellringer compare and explain in complete sentences and formulas how using the newton’s three...
TRANSCRIPT

Bellringer
Compare and explain in complete sentences
and formulas how using the Newton’s three
laws of motion find the resultant force.

HOMEWORK
SUBMIT YOUR PROJECT (50%), ALL 3
COMPONENTS

Force System Force System ResultantResultant
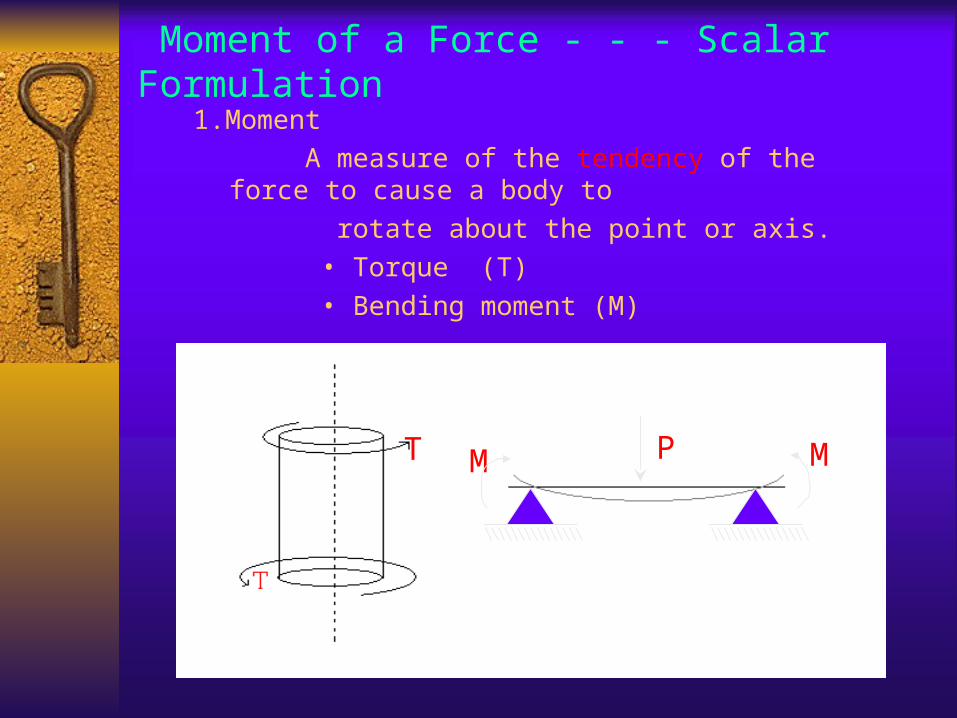
1.Moment
A measure of the tendency of the force to cause a body to
rotate about the point or axis.
• Torque (T)
• Bending moment (M)
M MPT
Moment of a Force - - - Scalar Formulation

2. Vector quantity
do
Lime of action (sliding vector)
(1) Magnitude ( N-m or lb-ft) Mo = Fd d = moment arm or perpendicular distance from point O to the line of action of force.
(2) Direction Right-Hard rule A. Sense of rotation ( Force rotates about Pt.O) Curled fingers B. Direction and sense of moment Thumb
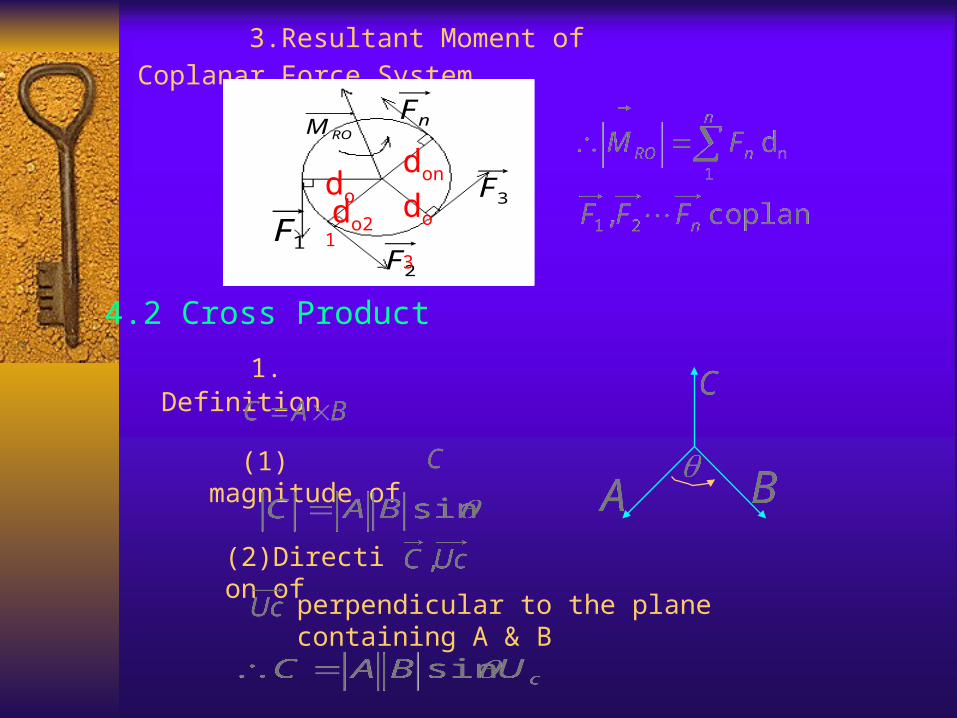
3.Resultant Moment of Coplanar Force System
ROM nF
3F
1F2F
do1do2
do3
don
1. Definition
(1) magnitude of
4.2 Cross Product
(2)Direction of
perpendicular to the plane containing A & B

2. Law of operation
(1)
(2)
(3)
3. Cartesian Vector Formulation
(1) Cross product of Cartesian unit vectors.
jikikj
kkjiji
kkjjii
;
90sin
0
ji

(2) Cross product of vector A & B in Cartesian vector form
k)BAB(A
jBABAi)B-AB(A
jkBAikBAjkBA
jiBAkjBAjiBA
kBjBiBkAjAiABA
kBjBiBB
kAjAiAA
xyyx
xzxzyzzy
yzyzzy
xyzxyx
zyxzyx
zyx
zyx
)(
)()(
kBB
AAj
BB
AAi
BB
AA
BBB
AAA
kji
BA
kAjAiAA
yx
yx
zx
zx
zy
zy
zyx
zyx
zyx

4.3 Moment of a Force – Vector Formulation
F d
o
(1) Magnitude
Mo=|Mo|=| r x F | =| r|| F | sinθ=F r sinθ
=F d
(2) Direction
Curl the right-hand fingers from r toward F (r cross F ) and the thumb is perpendicular to the plane containing r and F.
1. Moment of a force F about pt. O
Mo= r x F
where r = A position vector from pt. O to any pt. on the line of action of force F .

4.4 Principle of moments
Varignon’s theorem
The moment of a force about a point is equal to the sum of the moment of the force’s components about the point .
r
o
F1
F2
Mo=r x F
F = F1+F2
Mo= r x (F1+F2)
= r x F1+ r x F2
= MO1+MO2
F
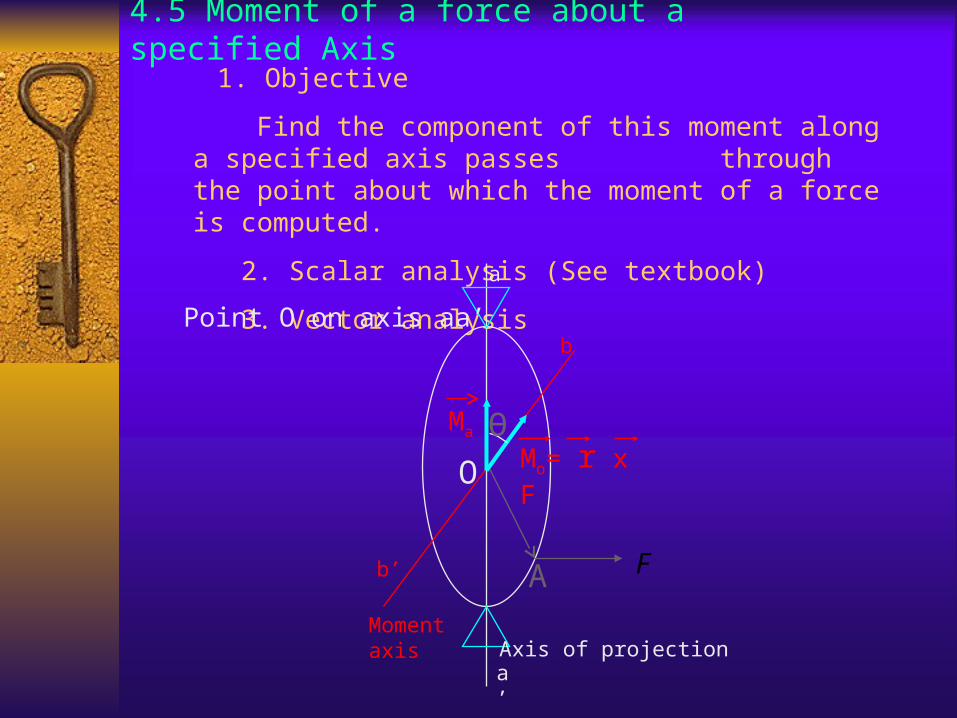
1. Objective
Find the component of this moment along a specified axis passes through the point about which the moment of a force is computed.
2. Scalar analysis (See textbook)
3. Vector analysis
4.5 Moment of a force about a specified Axis
Moment axis
b’
b
Ө
a’
a
A
Ma
Mo= r x F
F
O
Axis of projection
Point O on axis aa’

(1) Moment of a force F about point 0
Mo= r × F
Here, we assume that bb’ axis is the moment axis of Mo
(2) Component of Mo onto aa´ axis
Ma = Ma ua
Ma=Mo cosθ
=Mo ●ua=( r × F ) ● ua
=trip scalar product
Here
Ma=magnitude of Ma
ua= unit vector define the direction of aa´ axis
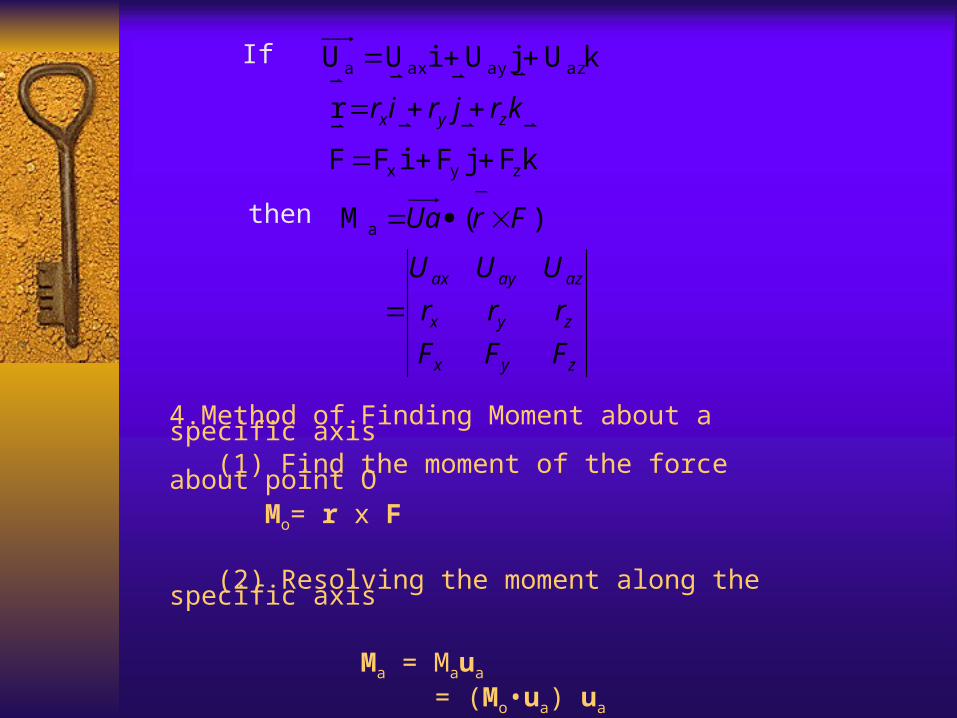
4.Method of Finding Moment about a specific axis (1) Find the moment of the force about point O Mo= r x F
(2) Resolving the moment along the specific axis
Ma = Maua
= (Mo•ua) ua
=[ua •( r x F )]ua
zyx
zyx
azayax
FFF
rrr
UUU
FrUa
)(Ma
kFjFiFF
r
kUjUiUU
zyx
azayaxa
krjrir zyx
If
then

d
4.6 moment of a couple
3. Vector Formulation
Fθr
dF
M= r x F
|M|=M=|r x F |=r F sinθ
=F d
1. Definition ( couple) 偶力矩
Two parallel forces have the same magnitude, opposite distances, and are separated by a perpendicular distance d.
2. Scalar Formulation
(1) Magnitude M=Fd
(2) Direction & sense (Right-hand rule)
•Thumb indicates the direction
•Curled fingers indicates the sense of rotation

(1) The couple moment is equivalent to the sum of the moment of both couple forces about any arbitrary point 0 in space.
Br A
F
-F
rB
rAo
Mo= rAx( -F )+ rB x F
=(-rA+rB) x F
=r x F= M
(2) Couple moment is a free vector which can act at any point in space.
o’o
B
A
-FF
rMo=Mo’= r x F=M
Remark:Remark:

4. Equivalent Couples The forces of equal couples lie either in the same plane or in planes parallel to one another.
5. Resultant couple momentApply couple moment at any point p on a body and add them vectorially.
AB
M1
M2
M1
M2
MR=ΣM=Σ r x F
A
B
F-F
-FF
plane A // plane BF-Fd
d
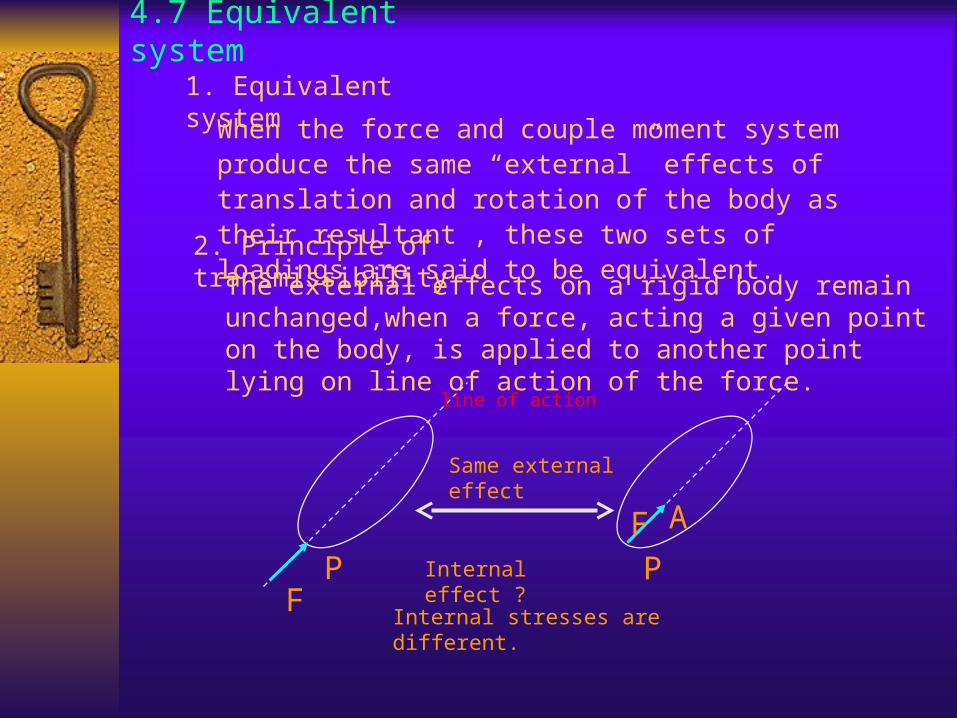
4.7 Equivalent system
1. Equivalent system
When the force and couple moment system produce the same “external” effects of translation and rotation of the body as their resultant , these two sets of loadings are said to be equivalent.
2. Principle of transmissibility
The external effects on a rigid body remain unchanged,when a force, acting a given point on the body, is applied to another point lying on line of action of the force.
PF
PF A
line of action
Same external effect
Internal effect ?
Internal stresses are different.
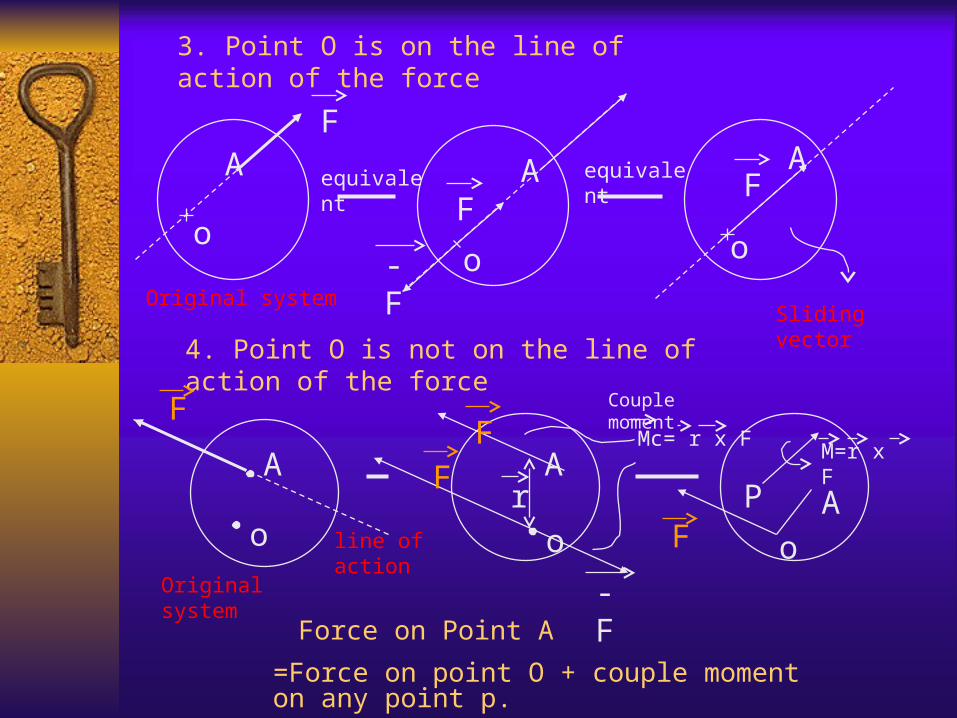
3. Point O is on the line of action of the force
A equivalent F
-F o
A
o
A
Sliding vector
4. Point O is not on the line of action of the force
o
A
Original system
line of action
ro
-F
FF
Couple moment
oAP
M=r x FMc= r x F
Force on Point A
=Force on point O + couple moment on any point p.
Original system
o
F
Fequivalent
F
A
F

Example:
AA
F Fo o
AA
FF
o o X Pd
Mo= F d
M= F d (Free vector)
Point O is on the line of action of the force
Point O is not on the line of action of the force

4.8 Resultant of a force & couple system
1. Objective
Simplify a system of force and couple moments to their resultants to study the external effects on the body.
2. Procedures for Analysis
(1)Force summations
FR=F1+F2+……+ΣF
(2)Moment summations
MR0= ΣMC+r1o*F1+r2o*F2= ΣMC+ ΣM0
MC:Couple moment in the system
Mo:Couple moment about pt.O of the force in the system.

4.9 Further Reduction of a force & couple system
1. Simplification to a single Resultant Force
(1)Condition
FR MR0 or FR*MR0 = 0
(2)Force system
A. Concurrent Force system
B.Coplanar Force System
F2 F1 FR
Equivalent
P =
System
Fn no couple moment
y F1,F2,F3 on xy plane
F3 M1&M2:z direction MR0=ΣMC+ Σr * F P MR0
F2 x => => d=
FR
F1 FR=ΣF

z z FR z
F1 r2 F2 MR0 FR= ΣF
r1 y = y = y
M1 p o
r3 F3 x x MR0
x M2 d = --------------
|FR|d=|MR0| FR
C. Parallel Force System
1. F1 // F2 //……// Fn
2. MR0 perpendicular to FR , MR0=ΣM+ Σr*F
2. Reduction to a wrench
(1) Condition: FR MR0
MR0=M +M//
M = moment component FR
M// = moment component // FR

(2) Wrench (or Screw)
An equivalent system reduces a simple resultant
force FR and couple moment MR0 at pt.0 to a
collinear force FR and couple moment M// at pt.
o
oo
a
aa
a
a
a
b
b
b
bb
b
FRMRo
FRFR
pp
M//
M//