basic robot design. 3 steps design build program drawing and thinking of ideas using your design to...
TRANSCRIPT

Basic Robot Design
3 Steps
Design
Build
Program
Drawing and thinking of ideas
Using your design to make a robot
Telling your robot what to do

Design Ideas• K.I.S.S. – Keep It Simple, Silly– Don’t try to make a huge contraption– Simple robots work more efficiently– You only have 3 days to make your robot– It’s not rocket science!

Design Ideas• Have a strong robot– Have a strong base that you can attach
other parts to– Try to have at least 2 points of
connection for each part of your robot
• Your robot won’t be able to do anything if it falls apart!
Design Ideas• Think about the end– Think about the challenge while
designing your robot• Will it be able to move to the goal?• Will it be able to pick up the pieces?
– Think of all the things your robot will need to do

Design Ideas• Draw, Draw, Draw!– It’s easier to remember ideas, and show
them to your team if you draw them out– You have notebooks, use them!

What Does Your Robot Need to Do?
• Think of everything, even something as basic as moving
• Task:– Step 1:– Step 2:– Step 3:– Step 4:

What do you have?• NXT Brick – The brain of the robot• Motors – The limbs of the robot• Various sensors– Light Sensor– Touch Sensor– Ultrasonic Sensor
• Wires – How everything communicates

NXT Brick• The brain of the robot• Receives input from the sensors and
tells the motors what to do based on this
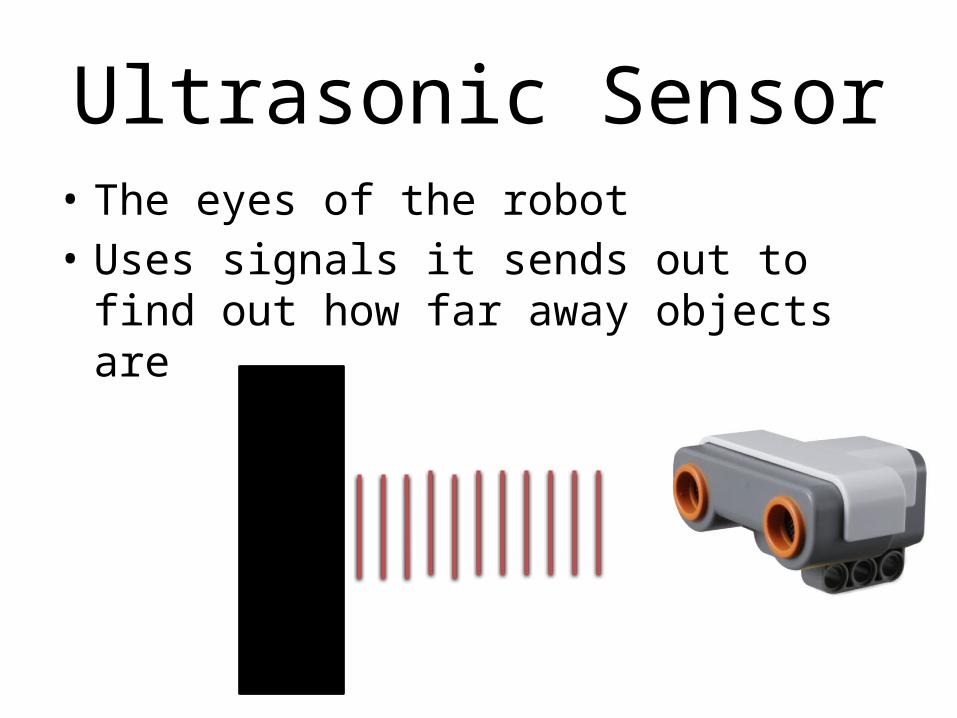
Ultrasonic Sensor• The eyes of the robot• Uses signals it sends out to find out
how far away objects are

Light Sensor• Used to tell if the robot is on a line• Can help guide the robot• Uses the same mechanics as the
ultrasonic sensor

Touch Sensor• Tells the robot when it hits something• Used to trigger movements to pick
something up or move away from the object that it hit
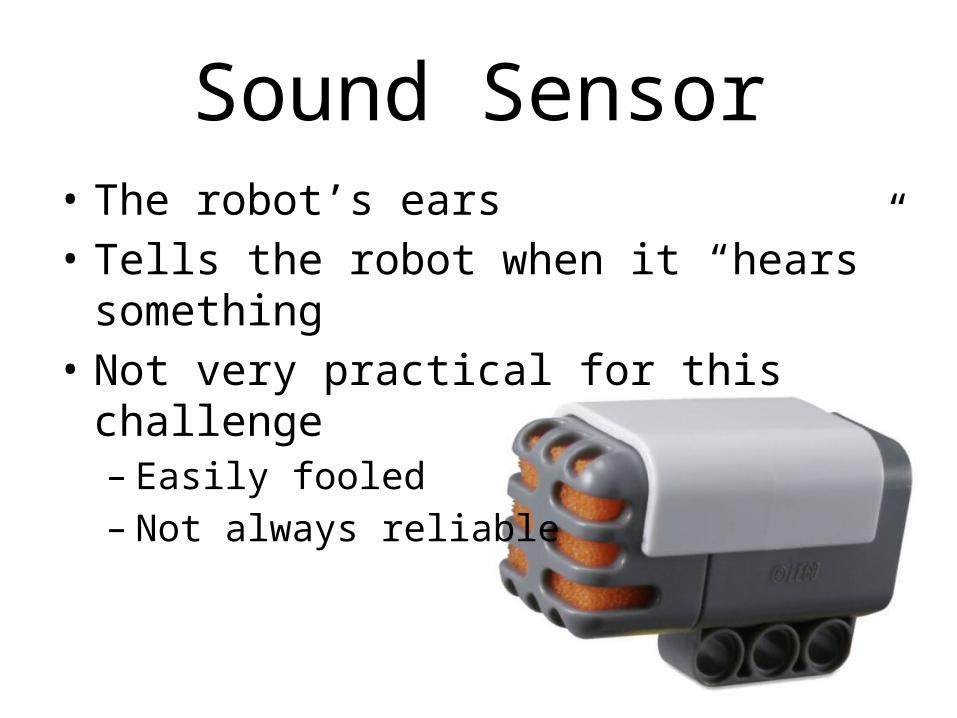
Sound Sensor• The robot’s ears• Tells the robot when it “hears”
something• Not very practical for this challenge– Easily fooled– Not always reliable

Motors• Move forward and backward• Instead of sending out information,
they receive it– This information tells them what to do
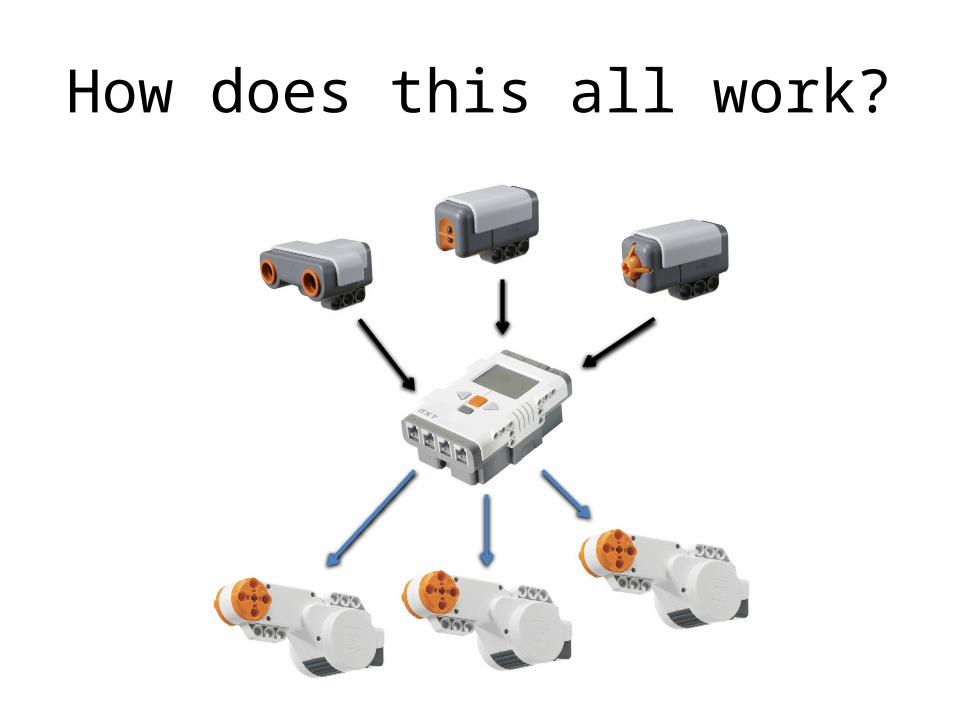
How does this all work?