autonomous navigation for a dynamical hexapod robot...
TRANSCRIPT

Available online at www.sciencedirect.com
SciVerse ScienceDirect
Procedia Engineering
ELSEVIER Procedia Engineering 38 (2012) 330 — 341 www.elseviencom/locate/procedia
International Conference on Modeling Optimisation and Computing
Autonomous Navigation for a Dynamical Hexapod Robot using Fuzzy Logic Controller
*Mohd Tarmizi Ibrahima, Dirman Hanafib, Ruzlaini Ghoni a
'Faculty of Electrical Automation Engineering Technology, TATiUC, Terengganu 24000, Malaysia
bFaculty of Electrical and Electronic Engineering, UTHM, Batu Pahat 86400, Malaysia
Abstract
Single guidance of autonomous robot tends to have limitation with certain conditions which limits the robot movement. Meanwhile, not all surface areas are suitable for the line navigation method such as the application of the coloured line on a high traffic area may cause the line to become dirty. The second method known as wall navigation also has its drawback in which not all paths are located on the wall. This condition will lead in robot's false reading which misinterpreted it is as the obstacle. This paper proposes a combination of both methods into the hexapod robot which compensate the lack in each navigation method. The fuzzy logic controller is applied to create a smooth response rather than the logic programming. The fuzzy rules are embedded in the PIC16F877A. The wall and line following method are done in separate rules but share the same output with either method triggered at one time. The experimental results verified the feasibility of the proposed method.
© 2012 Published by Elsevier Ltd. Selection and/or peer-review under responsibility of Noorul Islam Centre for Higher Education.
Keywords: Hexapod robot; Wall navigation; Line follower; Fuzzy logic
1. Introduction
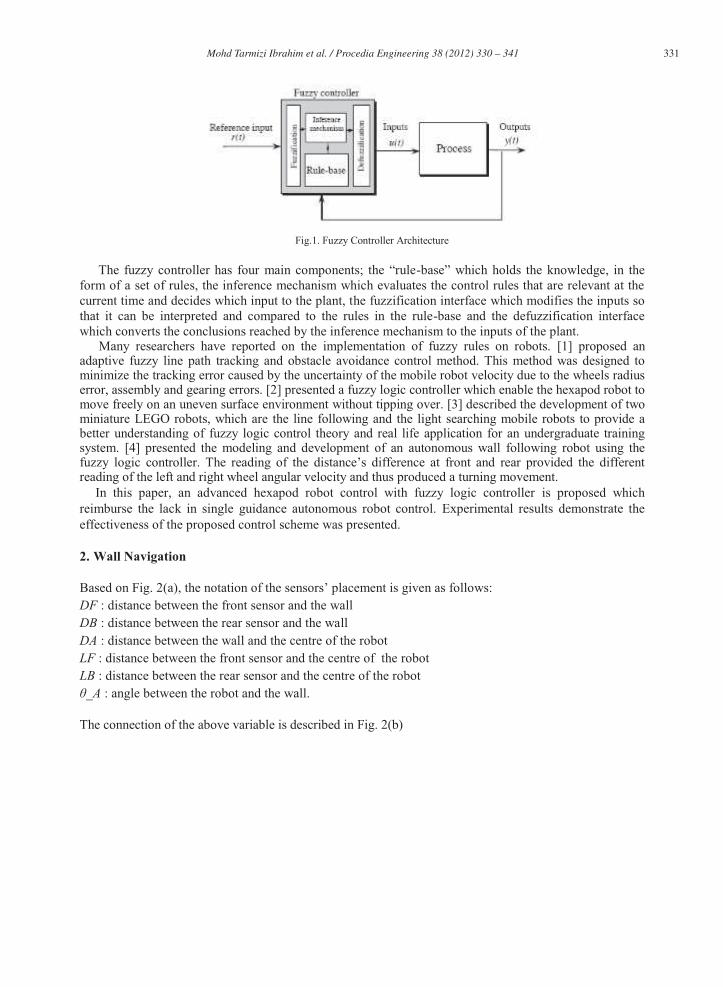
Fuzzy control provides a formal methodology for representing, manipulating, and implementing a human's heuristic knowledge on controlling a system. The fuzzy controller block diagram is given in Fig. 1, where a fuzzy controller embedded in a closed-loop control system. The plant outputs is denoted by y(t), and inputs is denoted by u(t),while the reference input to the fuzzy controller is denoted by r(t) [3].
*Corresponding author. Tel.: +-060179789530 E-mail address: [email protected] .
1877-7058 © 2012 Published by Elsevier Ltd. doi:10.1016/j.proeng.2012.06.042
331 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
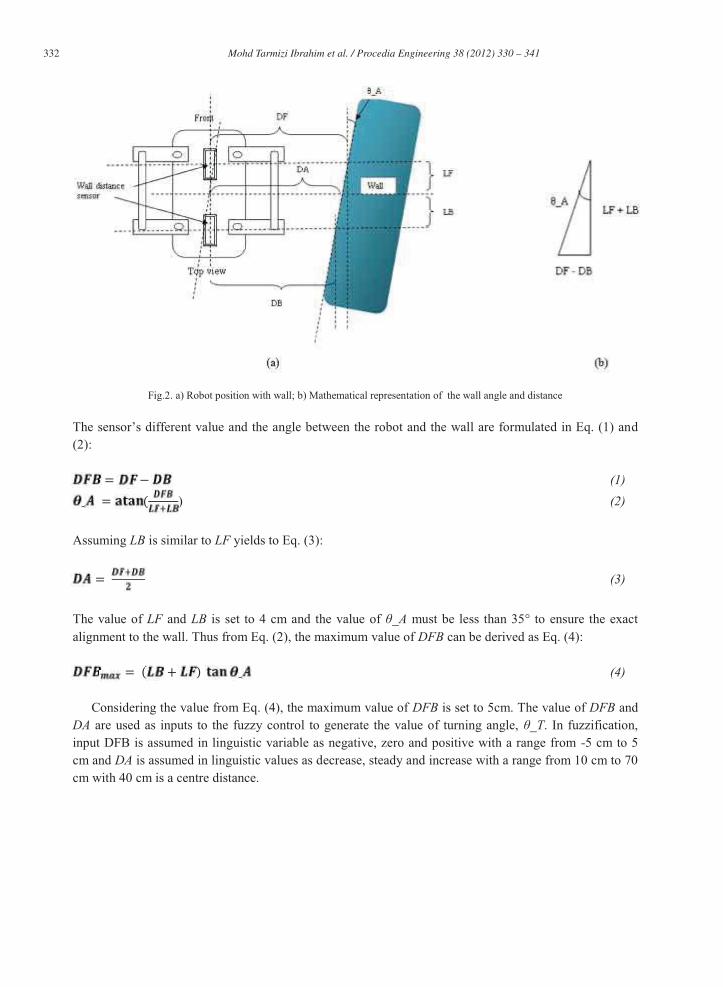
332 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
= −_ = (=
= ( + ) _
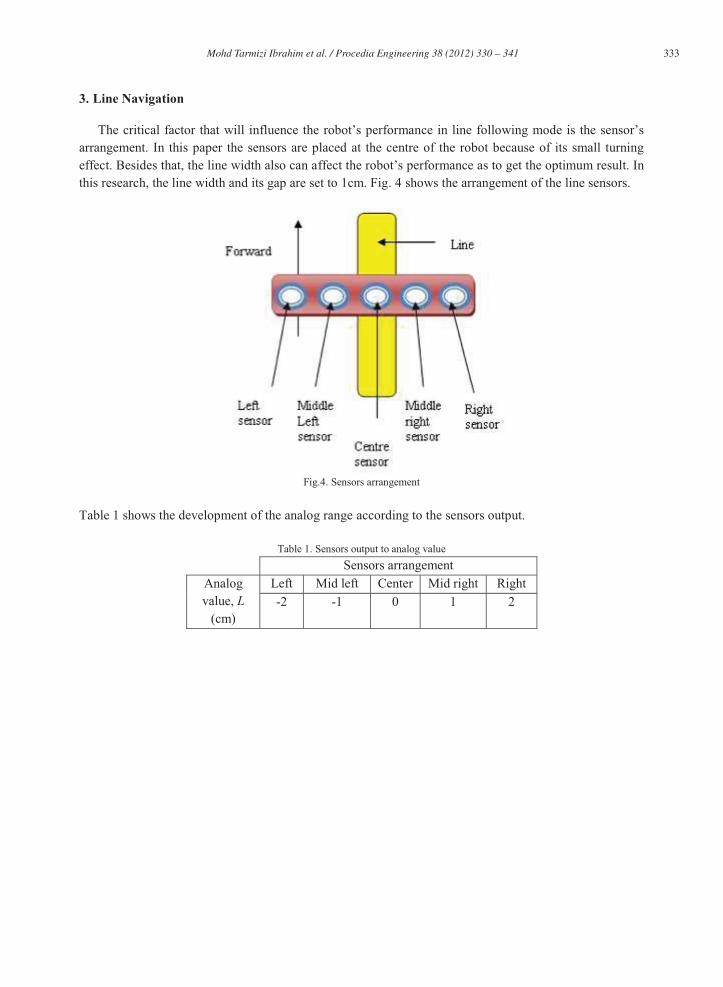
333 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341

334 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341

335 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
_ = × ( × _ )_ = × ( × _ )
( _ − _ ) _ ×( _ − _ ) = × _
_ − _ = _
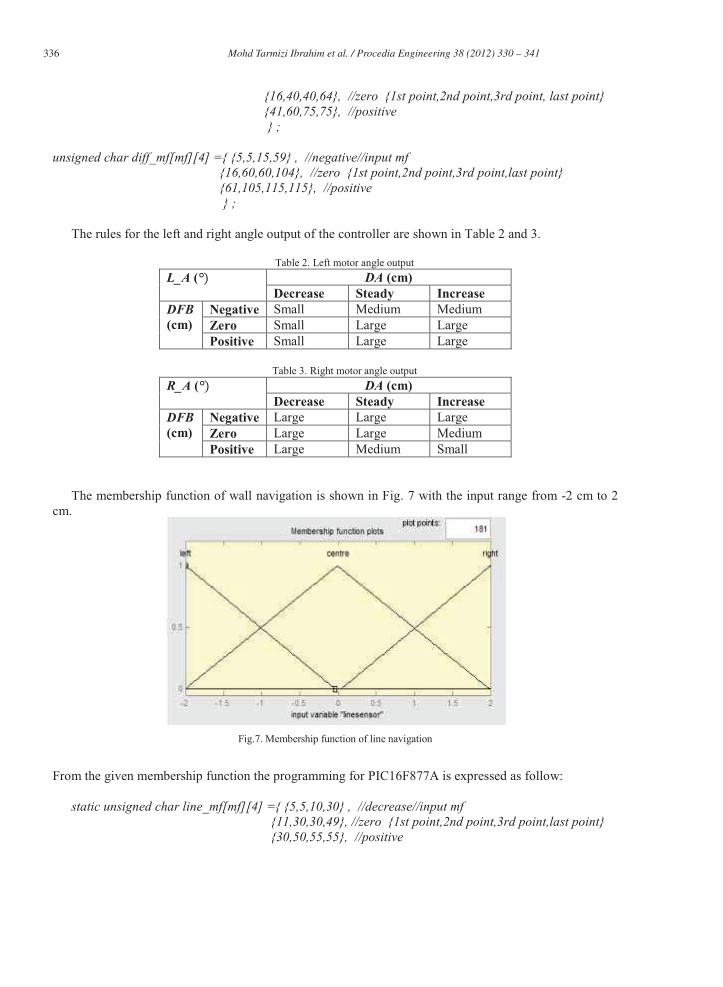
336 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
)
)
337 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
°) °)

338 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341

339 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341

340 Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 ( 2012 ) 330 – 341
Mohd Tarmizi Ibrahim et al. / Procedia Engineering 38 (2012) 330 — 341 341
Table 6. Steps taken for wall navigation
Distance from wall (cm)
Robot angle to the wall (degree) -30° -20° -10° 0 10° 20° 30°
20 13 15 15 16 17 18 20 30 4 5 6 6 8 9 11 40 2 2 1 0 1 2 3 50 10 9 8 5 5 4 4 60 20 18 17 15 13 13 12
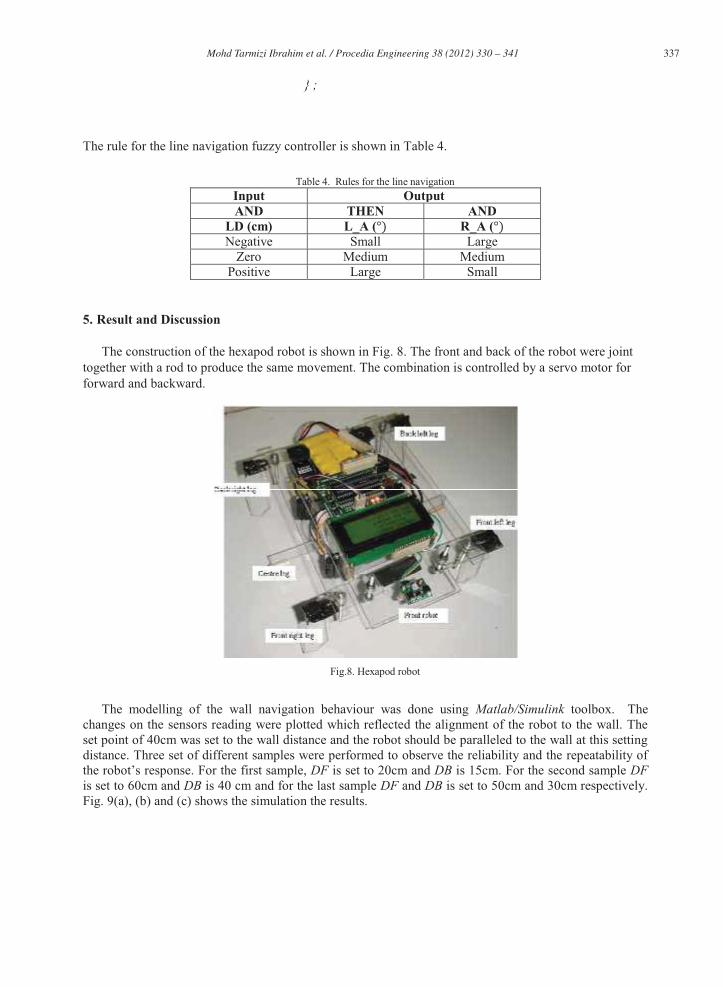
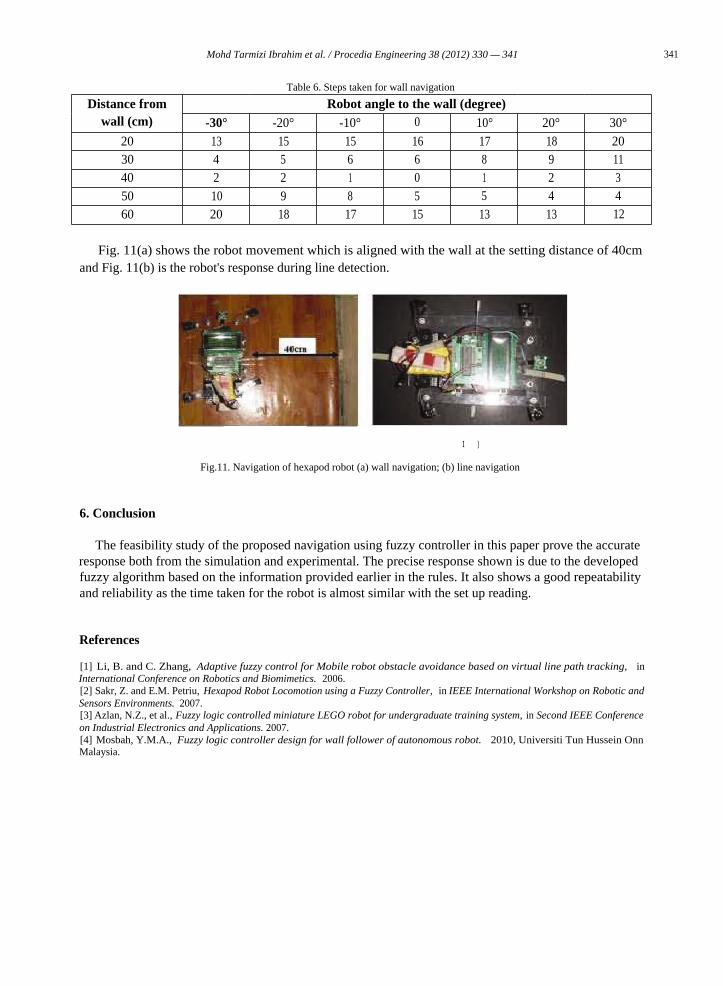
Fig. 11(a) shows the robot movement which is aligned with the wall at the setting distance of 40cm and Fig. 11(b) is the robot's response during line detection.
I. )
Fig.11. Navigation of hexapod robot (a) wall navigation; (b) line navigation
6. Conclusion
The feasibility study of the proposed navigation using fuzzy controller in this paper prove the accurate response both from the simulation and experimental. The precise response shown is due to the developed fuzzy algorithm based on the information provided earlier in the rules. It also shows a good repeatability and reliability as the time taken for the robot is almost similar with the set up reading.
References
[1] Li, B. and C. Zhang, Adaptive fuzzy control for Mobile robot obstacle avoidance based on virtual line path tracking, in International Conference on Robotics and Biomimetics. 2006. [2] Sakr, Z. and E.M. Petriu, Hexapod Robot Locomotion using a Fuzzy Controller, in IEEE International Workshop on Robotic and Sensors Environments. 2007. [3] Azlan, N.Z., et al., Fuzzy logic controlled miniature LEGO robot for undergraduate training system, in Second IEEE Conference on Industrial Electronics and Applications. 2007. [4] Mosbah, Y.M.A., Fuzzy logic controller design for wall follower of autonomous robot. 2010, Universiti Tun Hussein Onn Malaysia.