autonomous motion planning using neural network · pdf fileautonomous motion planning using...
TRANSCRIPT
AUTONOMOUS MOTION PLANNING USING NEURAL NETWORK Presented by: Debasish Sahu University of Hamburg, Department of Informatics 27-10-2014
1
Overview
¨ Introduction ¨ Related Works ¨ Why RBF ¨ System Architecture ¨ Digital Map Generation ¨ RBF Network ¨ RBF Function ¨ Further Issues ¨ Regularization ¨ Design of Learning Algorithm ¨ Simulations ¨ Comparison ¨ Conclusions ¨ References ¨ Questions
2
Introduction
Objective- ¨ Generate a smooth feasible
path to reach goal
Challenges- ¨ Unstructured Environment ¨ Limited Sensing Capability ¨ Non holonomic constraint of
vehicle
3
Related Works
¨ Heuristic Approaches - Dijkstra, A*, D*, ARAs
¨ Probabilistic Approaches
¨ Single query planners
¨ EST, RRT, Path directed subdivision trees
¨ Clearance based shortest path planner
¨ Voronoi diagram based
¨ SVM
4
Why RBF
¨ Universal Approximator
¨ Can approximate any non linear function
¨ Generated smoothness can be executed easily
¨ Fast learning rate
¨ Insensitive to environment
5
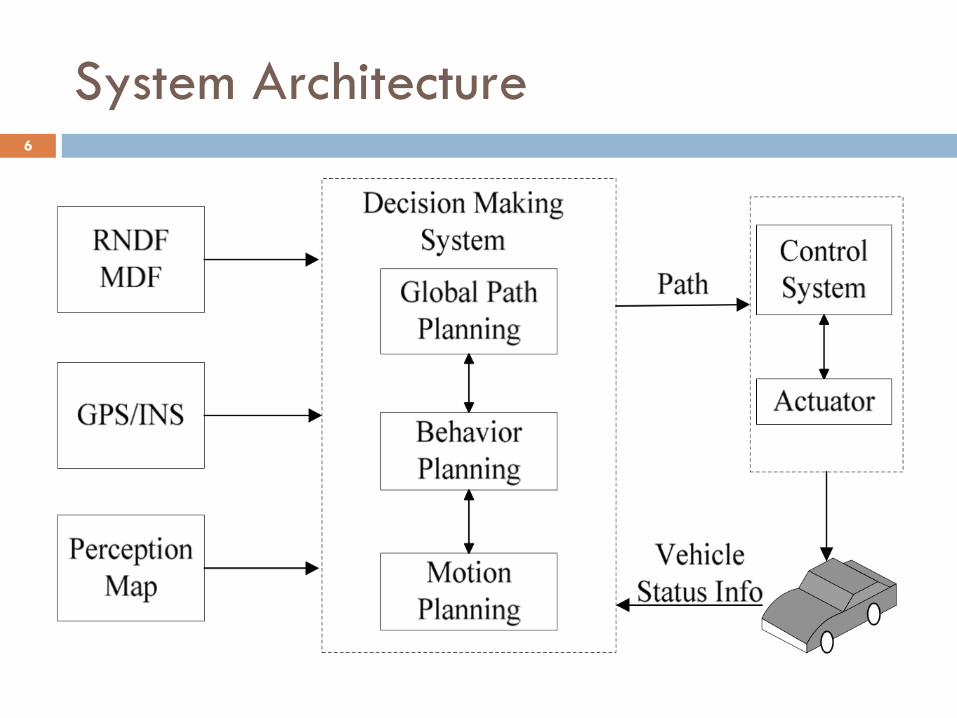
System Architecture 6
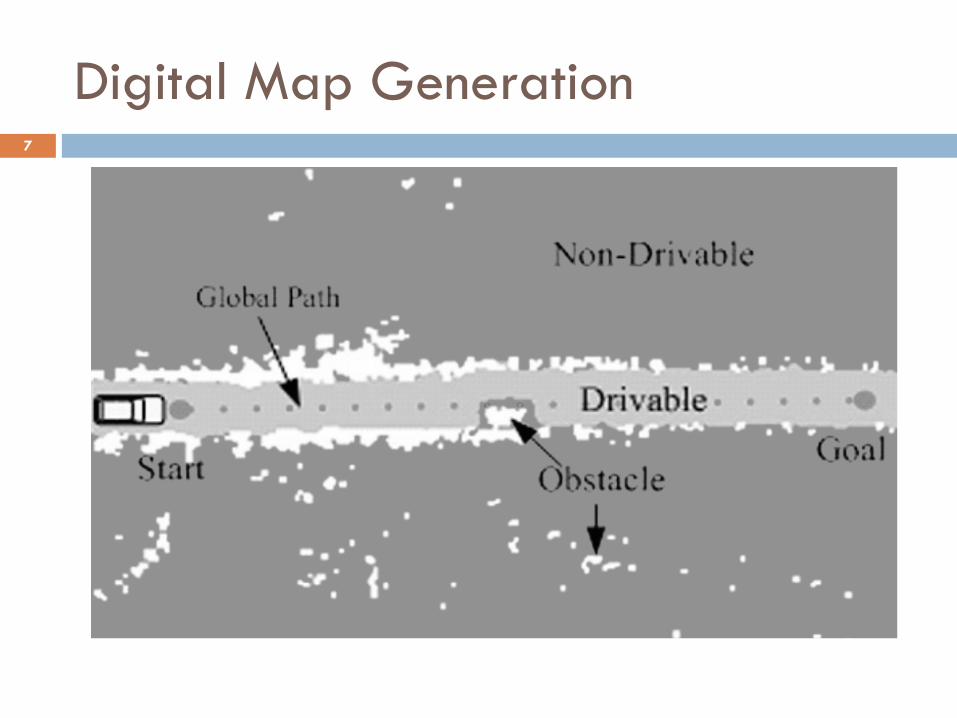
Digital Map Generation 7
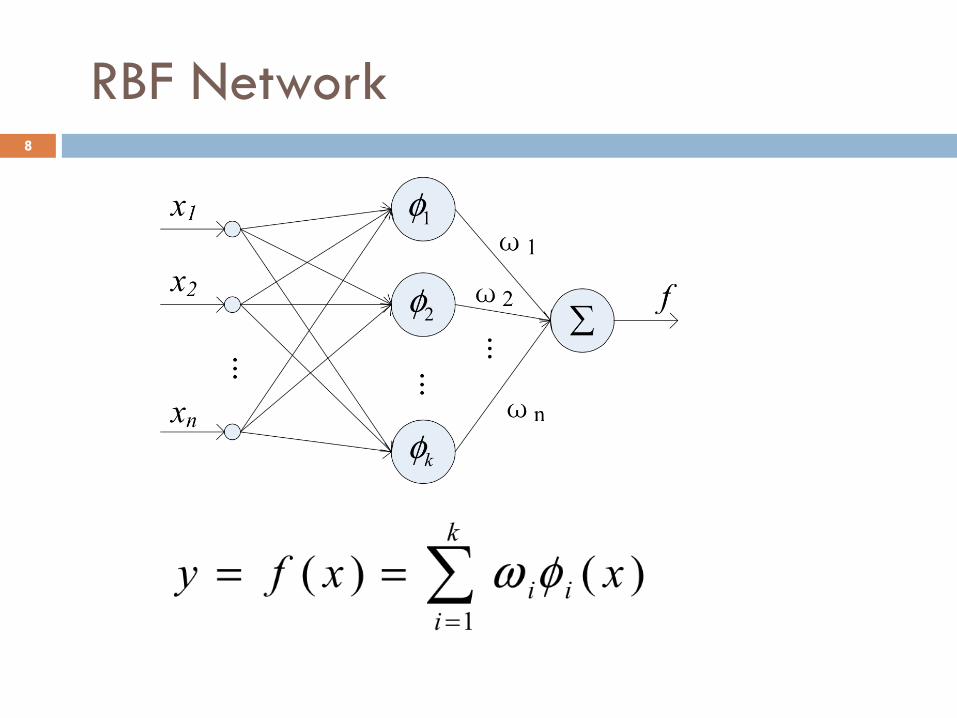
RBF Network 8
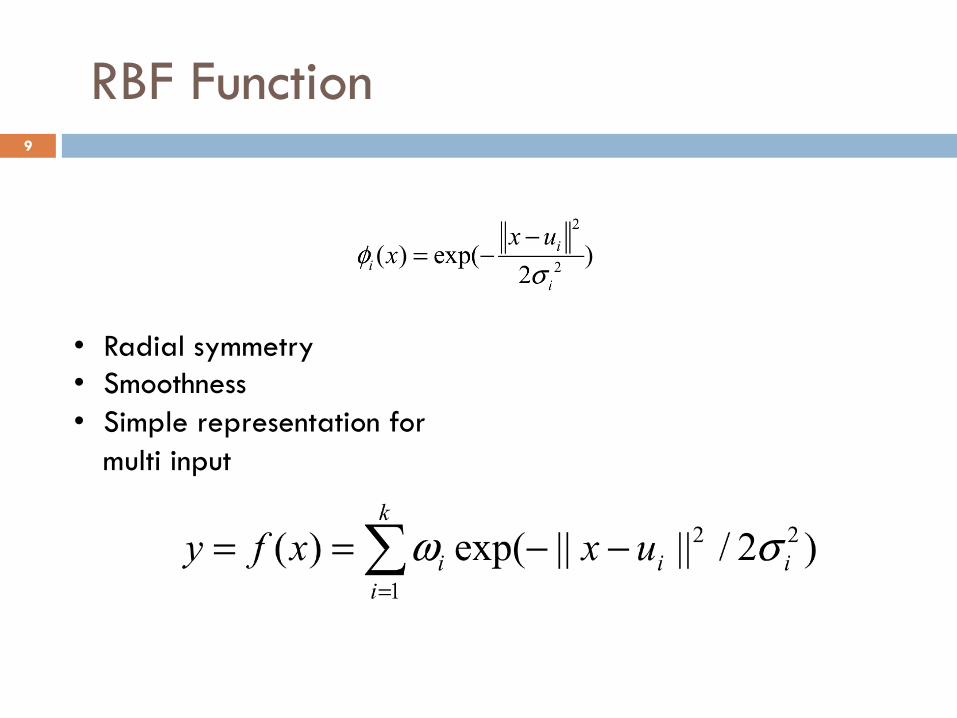
RBF Function
• Radial symmetry • Smoothness • Simple representation for
multi input
9
Further issues!
¨ Unstable solution of matrix inverse function
¨ Oversampling due to noise
Solution:
¨ Use regularization network
10
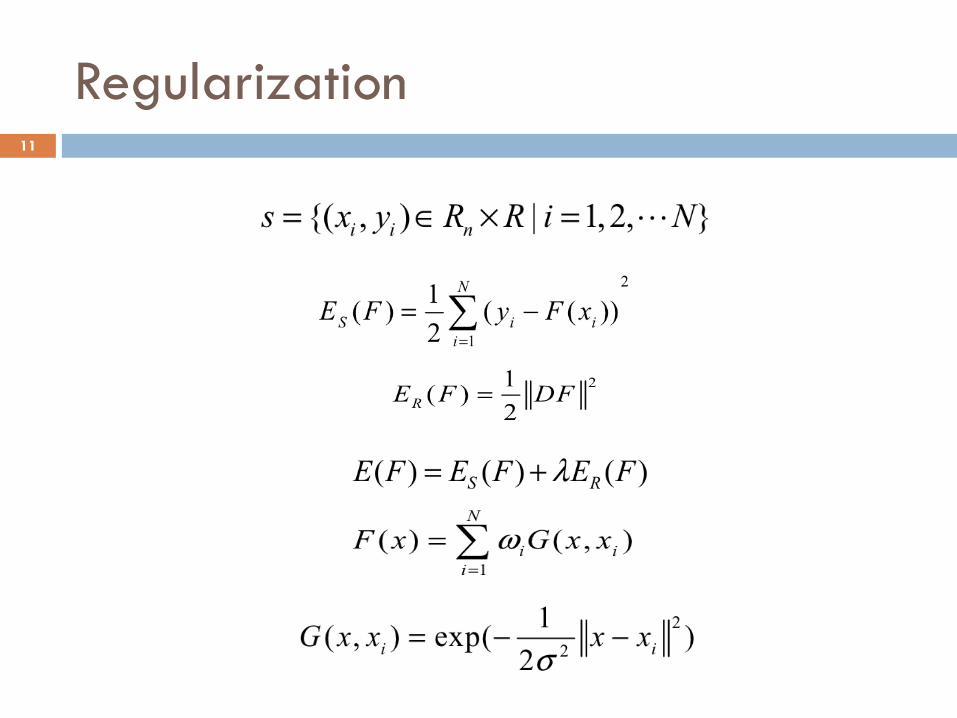
Regularization 11
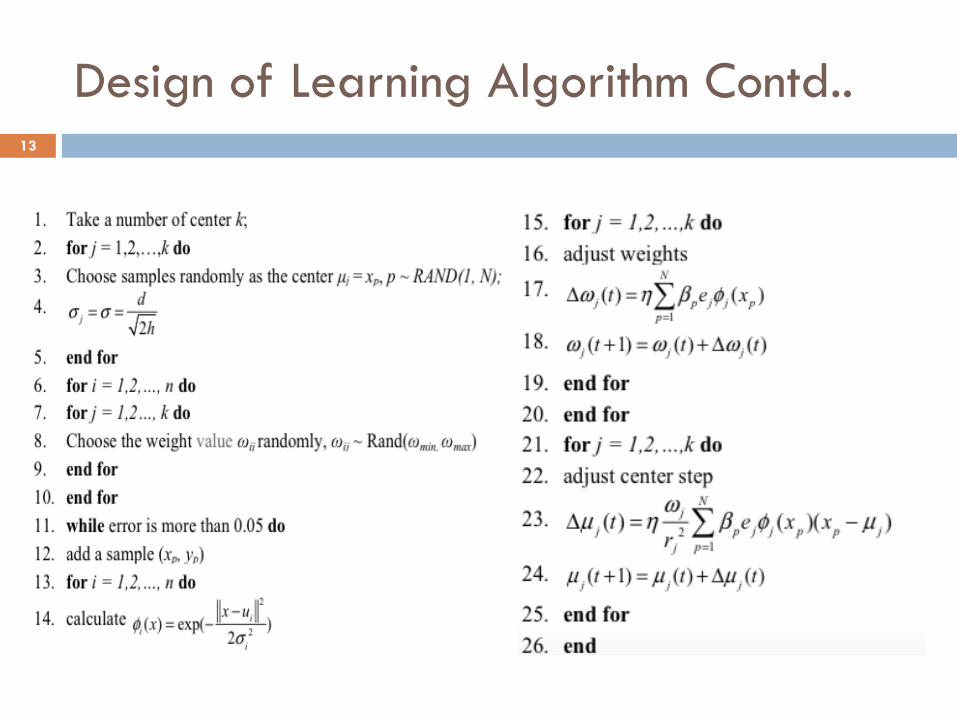
Design of Learning Algorithm
¨ Computing the width
¨ Adjusting centers
¨ Adjusting weights
12
Design of Learning Algorithm Contd.. 13
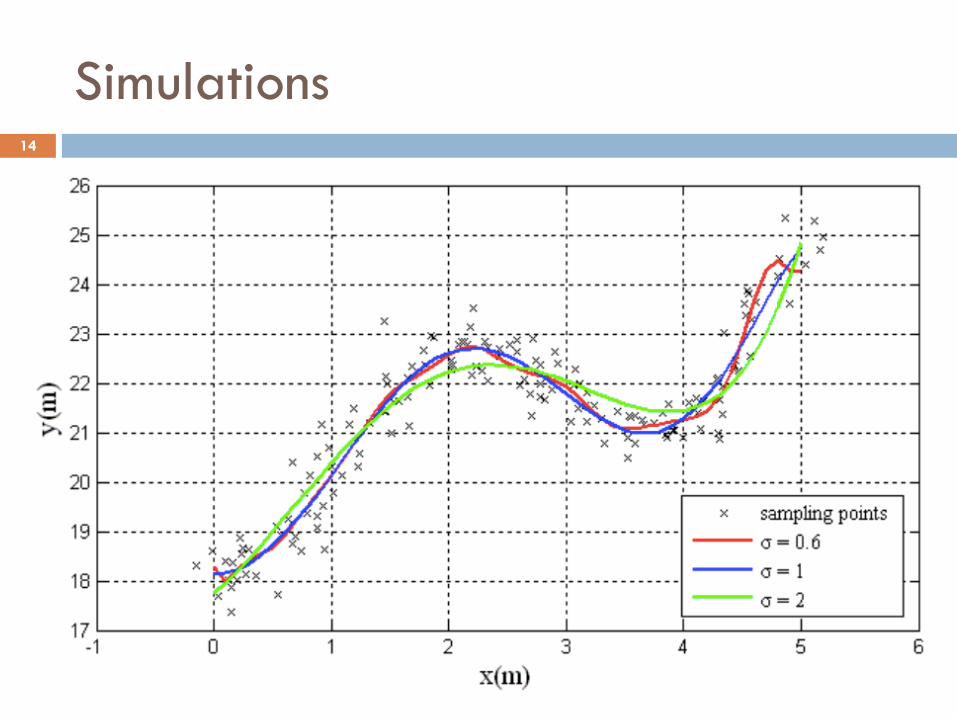
Simulations 14
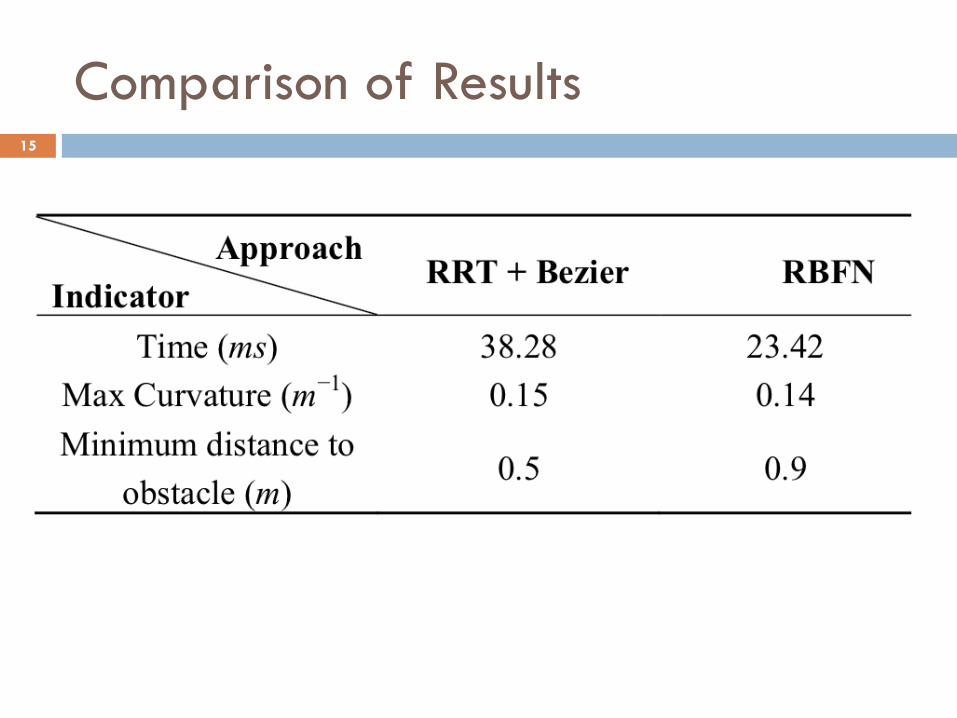
Comparison of Results 15
Conclusion
¨ Smooth and stable collision free path
¨ Satisfy vehicle kinematic constraints
¨ Easy computations
16
References
1. Ferguson, D.; Likhachev M.; Stentz A. A Guide to Heuristic-based Path Planning 2. Touretzky D.; Thompson E. Cognitive Robotics CMU 3. Wilfong, G.T. Motion planning for an autonomous vehicle. In Autonomous Robot Vehicles;
Springer: New York, NY, USA, 1990; pp. 391–395. 4. Bruce, J.; Veloso, M. Real-Time randomized path planning for robot navigation. Intell. Robot.
Syst. IEEE RSJ Int. Conf. 2002, 3, 2383–2388. 5. Gindele, T.; Jagszent, D.; Pitzer, B.; Dillmann, R. Design of the planner of Team AnnieWAY’s
autonomous vehicle used in the DARPA Urban Challenge 2007. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, Holland, 4–6 June 2008; pp. 1131–1136.
6. Garrido,S.;Moreno,L.;Blanco,D.Voronoidiagramandfastmarchingappliedtopathplanning. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 3049–3054.
7. Pomerleau, D.A. Alvinn: An Autonomous Land Vehicle in a Neural Network. In Advances in Neural Information Processing Systems 1; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1989; pp. 305–313.
8. Yang, S.X.; Meng, M. An efficient neural network approach to dynamic robot motion planning. Neural Netw. 2000, 13, 143–148.
17
Questions and Discussion
Thank You.
18