automatic aerial target recognition by using bispectrum ...molchano/hrrp_ticsp.pdf · automatic...
TRANSCRIPT
Slide1 / 20
Automatic Aerial Target Recognition by Using Bispectrum-Based Radar Data
Processing
Tampere University of Technology, Tampere, FinlandNational Aerospace University, Kharkov, Ukraine
Prof. Totsky A.V.Prof. Egiazarian K.O.Prof. Astola J.T.Molchanov P.O.
For further information please contact by email: [email protected]
Slide2 / 20
Goal: Improvement the performance of Radar Automatic Target Recognition (ATR) system by using new information features containing in radar high-resolution range profiles (HRRP).
We suggest to implement object recognition by new bispectrum-based radar signatures (bispectrum is the Fourier transform of third-order moment function of observation) : the samples located in the main modified diagonal of bispectrum.
The classifier strategy under consideration:- the geometrical classifier using all samples in radar signatures;- the using “majority voting” concept;- the maximum likelihood (ML) rule using Gaussian Mixture Model (GMM)
The HRRPs studied: Tu-16 and B1-B bomber aircrafts; Mig-21 tactical fighter aircraft, combat aircraft Tornado, and GLCM cruise missile.
Slide3 / 20
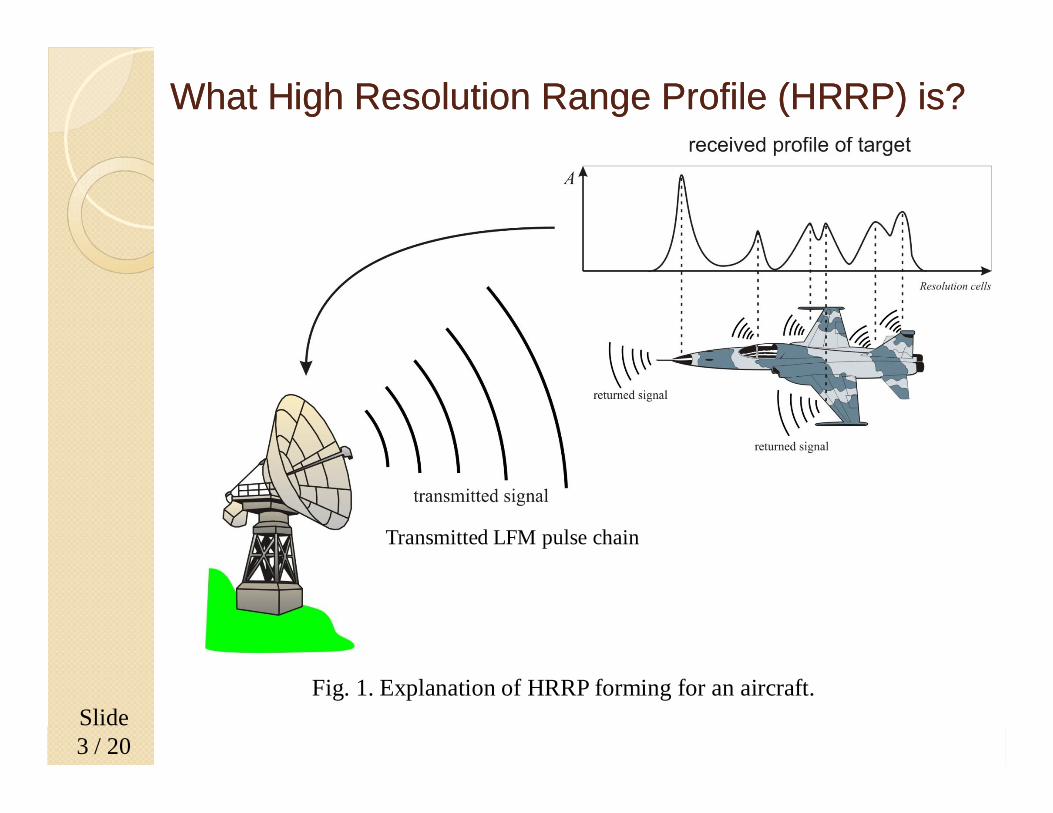
What High Resolution Range Profile (HRRP) is?What High Resolution Range Profile (HRRP) is?
Fig. 1. Explanation of HRRP forming for an aircraft.
Transmitted LFM pulse chain
Slide4 / 20
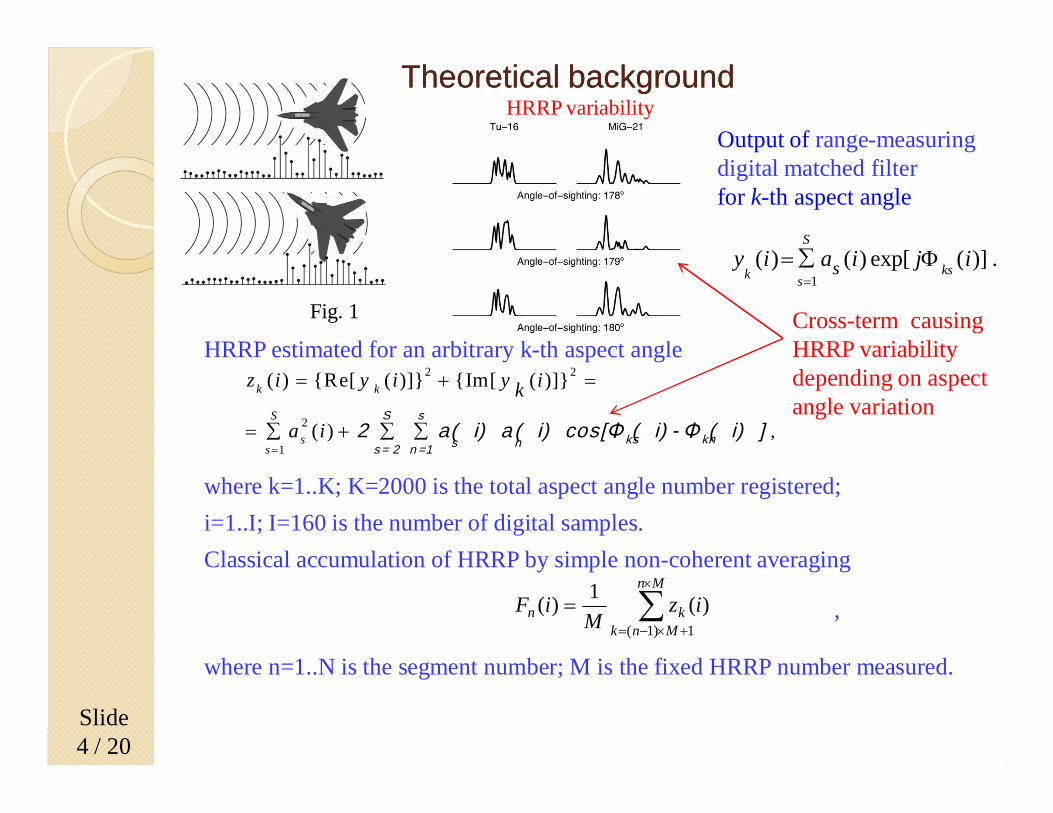
HRRP estimated for an arbitrary k-th aspect angle
where k=1..K; K=2000 is the total aspect angle number registered;i=1..I; I=160 is the number of digital samples.Classical accumulation of HRRP by simple non-coherent averaging
,
where n=1..N is the segment number; M is the fixed HRRP number measured.
Theoretical backgroundTheoretical background
Mn
Mnkkn iz
MiF
1)1(
)(1)(
1( ) ( ) exp[ ( )] .
S
ksk ssy i a i j i
Output of range-measuringdigital matched filterfor k-th aspect angle
HRRP variability
2 2
2
1,
( ) {Re[ ( )]} {Im[ ( )]}
( )
k k
S
ss
z i y i y ik
a iS s
ks kns ns = 2 n =12 a( i) a ( i) cos[ ( i) - ( i) ]
Cross-term causingHRRP variability depending on aspect angle variation
Fig. 1
Slide5 / 20
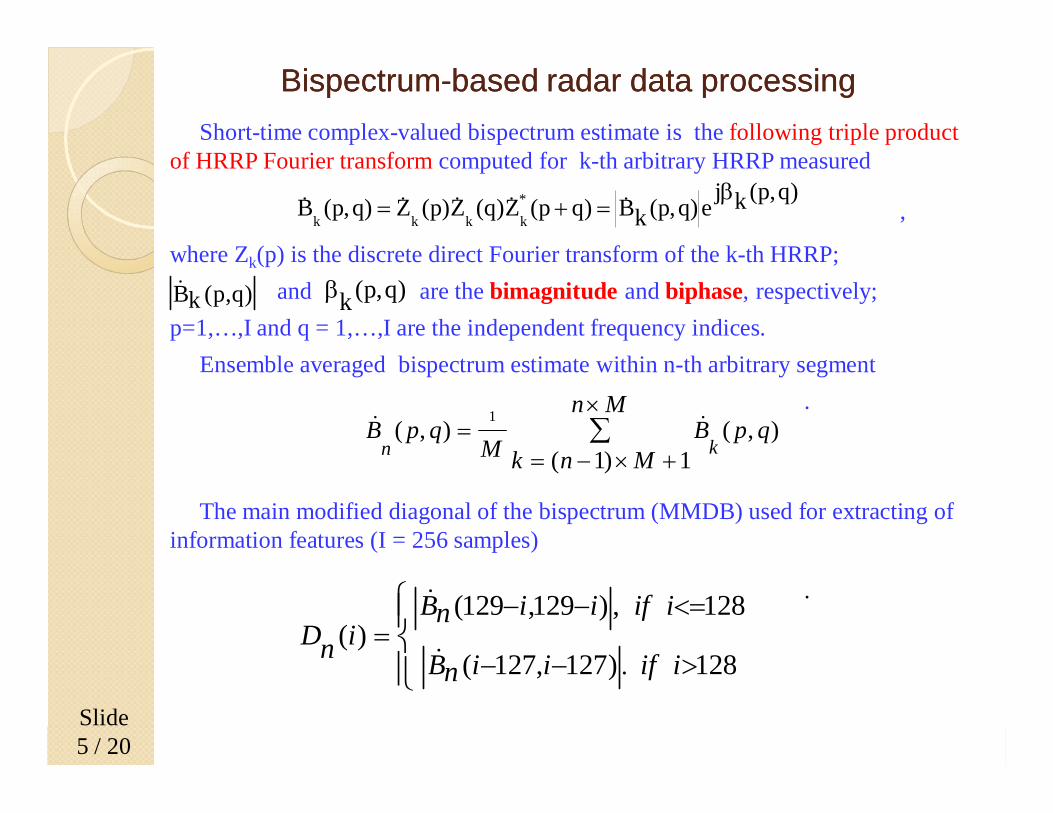
Short-time complex-valued bispectrum estimate is the following triple product of HRRP Fourier transform computed for k-th arbitrary HRRP measured
,
where Zk(p) is the discrete direct Fourier transform of the k-th HRRP; and are the bimagnitude and biphase, respectively;
p=1,…,I and q = 1,…,I are the independent frequency indices.Ensemble averaged bispectrum estimate within n-th arbitrary segment
.
The main modified diagonal of the bispectrum (MMDB) used for extracting of information features (I = 256 samples)
.
BispectrumBispectrum--based radar data processing based radar data processing
)q,p(kje)q,p(kB)qp(Z)q(Z)p(Z)q,p(B *
kkkk
Mn
MnkqpB
MqpB
kn 1)1(),(),(
1
.
(129 ,129 ) , 128( )
( 127, 127) 128
B i i if inD in B i i if in
B (p,q)k (p,q)k
Slide6 / 20
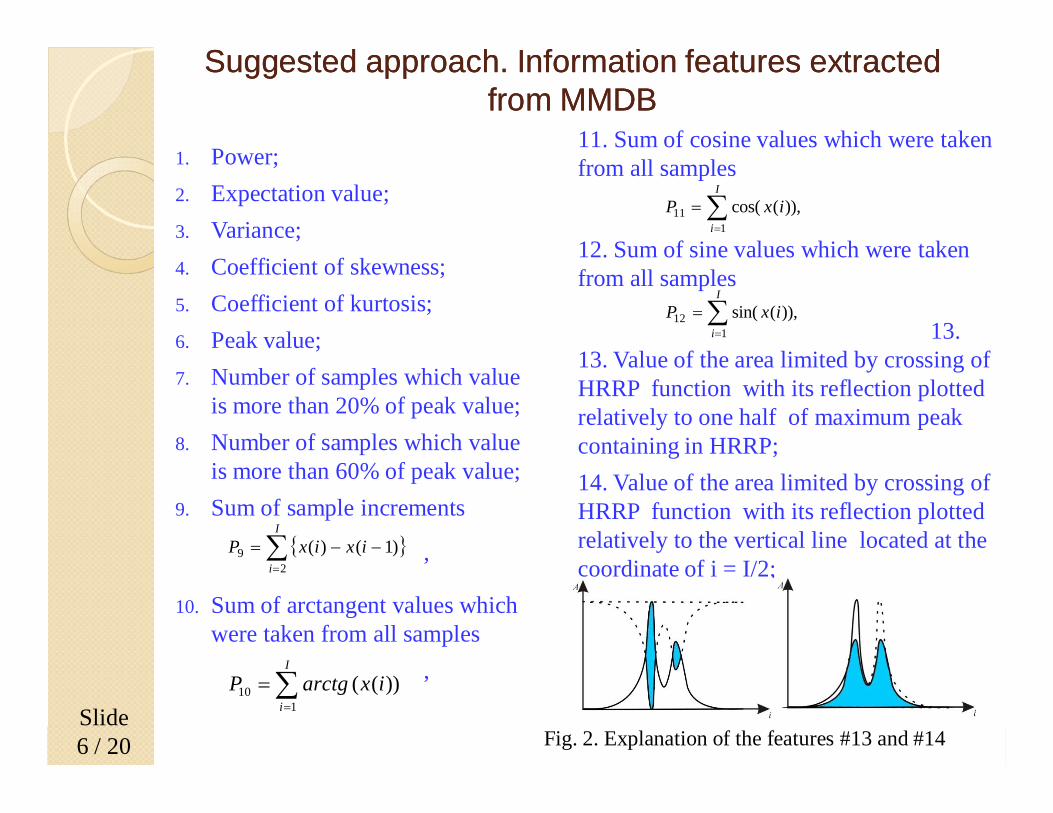
1. Power;2. Expectation value;3. Variance;4. Coefficient of skewness;5. Coefficient of kurtosis;6. Peak value;7. Number of samples which value
is more than 20% of peak value;8. Number of samples which value
is more than 60% of peak value;9. Sum of sample increments
,
10. Sum of arctangent values which were taken from all samples
,
Suggested approach. Information features extracted Suggested approach. Information features extracted from MMDBfrom MMDB
11. Sum of cosine values which were taken from all samples
12. Sum of sine values which were taken from all samples
13. 13. Value of the area limited by crossing of HRRP function with its reflection plotted relatively to one half of maximum peak containing in HRRP;14. Value of the area limited by crossing of HRRP function with its reflection plotted relatively to the vertical line located at the coordinate of i = I/2;15. The sum of first 8 coefficients in Taylor series.
Fig. 2. Explanation of the features #13 and #14
I
iixixP
29 )1()(
I
iixarctgP
110 ))((
I
i
ixP1
11 )),(cos(
I
i
ixP1
12 )),(sin(
Slide7 / 20
Information feature efficiency estimationInformation feature efficiency estimation
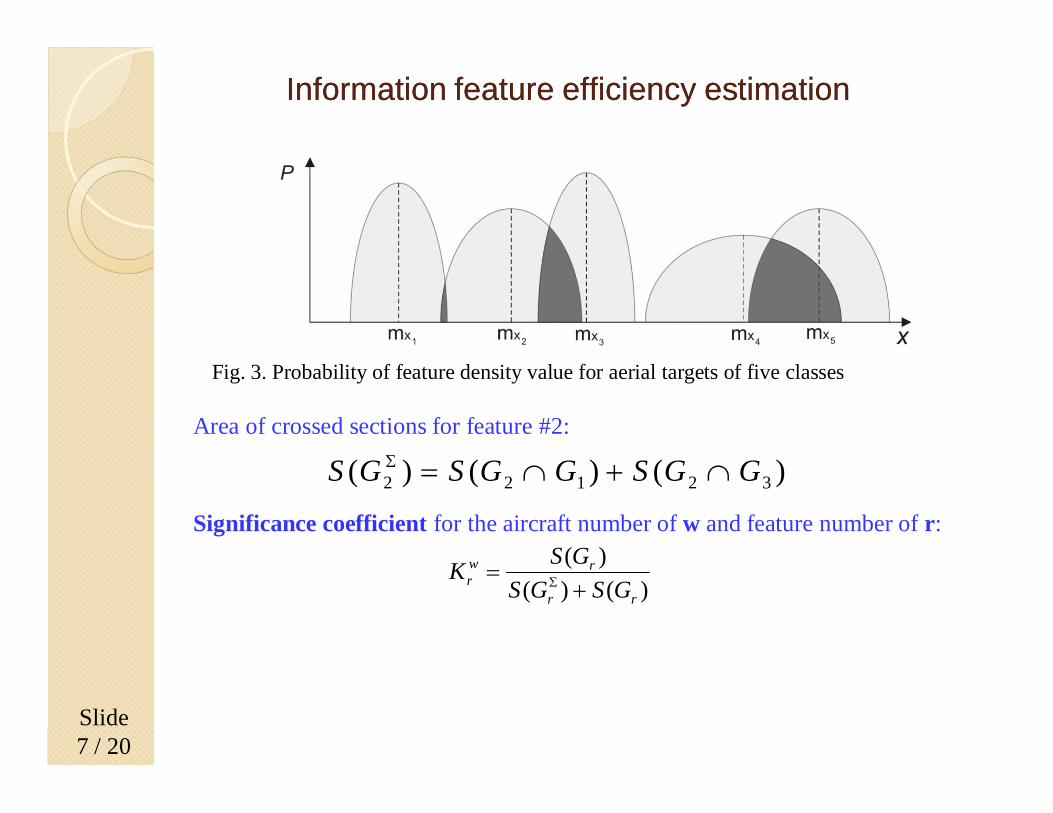
Fig. 3. Probability of feature density value for aerial targets of five classes
)()()( 32122 GGSGGSGSArea of crossed sections for feature #2:
Significance coefficient for the aircraft number of w and feature number of r:
)()()(
rr
rwr GSGS
GSK
Slide8 / 20
Assessment of the information feature efficiencyAssessment of the information feature efficiency
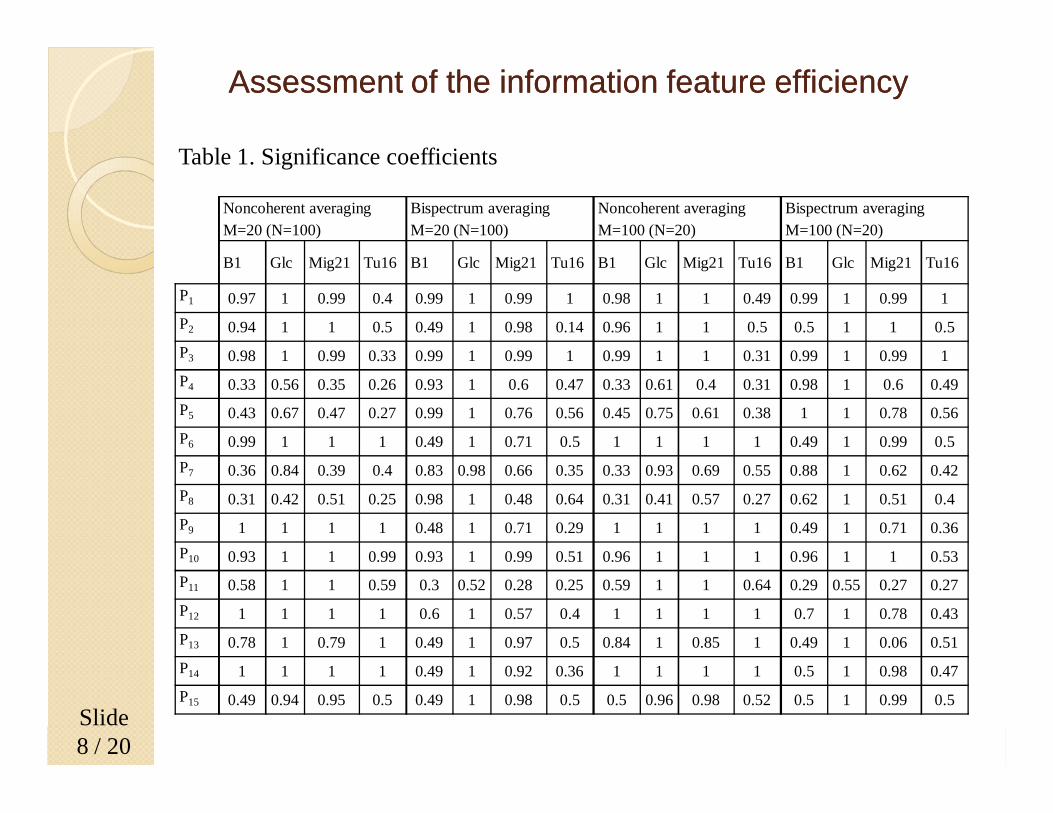
Table 1. Significance coefficients
Noncoherent averaging M=20 (N=100)
Bispectrum averaging M=20 (N=100)
Noncoherent averaging M=100 (N=20)
Bispectrum averaging M=100 (N=20)
B1 Glc Mig21 Tu16 B1 Glc Mig21 Tu16 B1 Glc Mig21 Tu16 B1 Glc Mig21 Tu16
P1 0.97 1 0.99 0.4 0.99 1 0.99 1 0.98 1 1 0.49 0.99 1 0.99 1P2 0.94 1 1 0.5 0.49 1 0.98 0.14 0.96 1 1 0.5 0.5 1 1 0.5P3 0.98 1 0.99 0.33 0.99 1 0.99 1 0.99 1 1 0.31 0.99 1 0.99 1P4 0.33 0.56 0.35 0.26 0.93 1 0.6 0.47 0.33 0.61 0.4 0.31 0.98 1 0.6 0.49P5 0.43 0.67 0.47 0.27 0.99 1 0.76 0.56 0.45 0.75 0.61 0.38 1 1 0.78 0.56P6 0.99 1 1 1 0.49 1 0.71 0.5 1 1 1 1 0.49 1 0.99 0.5P7 0.36 0.84 0.39 0.4 0.83 0.98 0.66 0.35 0.33 0.93 0.69 0.55 0.88 1 0.62 0.42P8 0.31 0.42 0.51 0.25 0.98 1 0.48 0.64 0.31 0.41 0.57 0.27 0.62 1 0.51 0.4P9 1 1 1 1 0.48 1 0.71 0.29 1 1 1 1 0.49 1 0.71 0.36P10 0.93 1 1 0.99 0.93 1 0.99 0.51 0.96 1 1 1 0.96 1 1 0.53P11 0.58 1 1 0.59 0.3 0.52 0.28 0.25 0.59 1 1 0.64 0.29 0.55 0.27 0.27P12 1 1 1 1 0.6 1 0.57 0.4 1 1 1 1 0.7 1 0.78 0.43P13 0.78 1 0.79 1 0.49 1 0.97 0.5 0.84 1 0.85 1 0.49 1 0.06 0.51P14 1 1 1 1 0.49 1 0.92 0.36 1 1 1 1 0.5 1 0.98 0.47P15 0.49 0.94 0.95 0.5 0.49 1 0.98 0.5 0.5 0.96 0.98 0.52 0.5 1 0.99 0.5
Slide9 / 20
Recognition and Classification rules Recognition and Classification rules
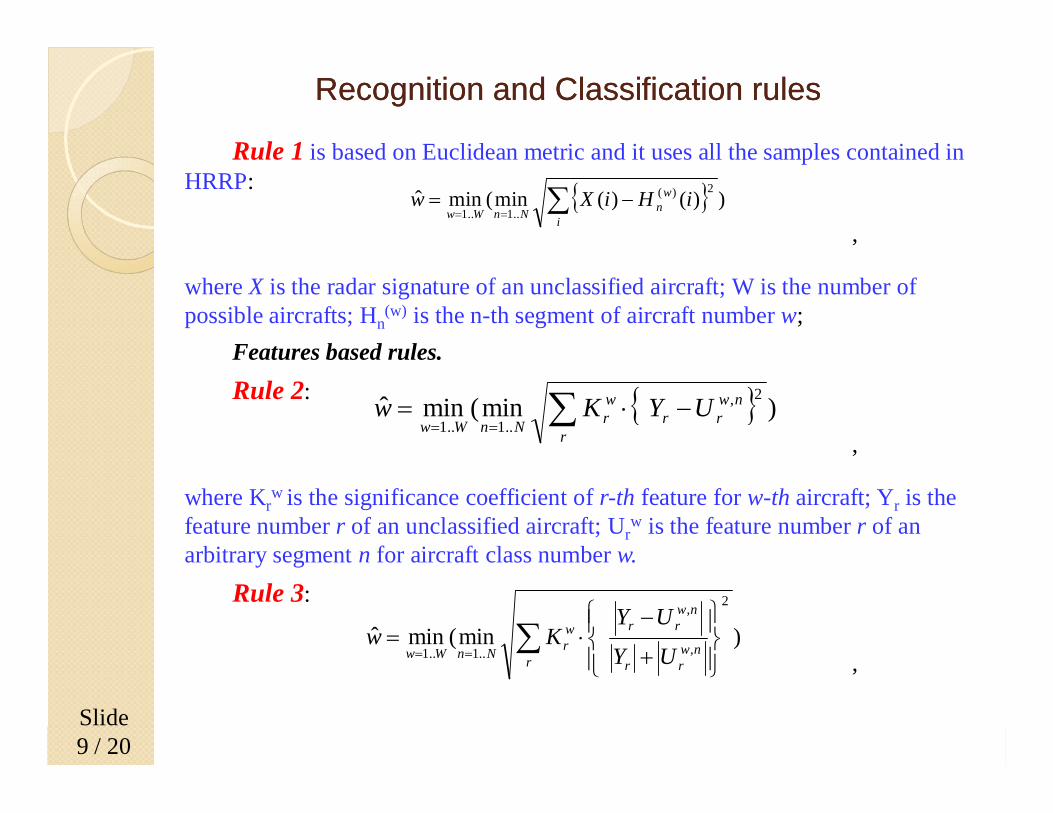
Rule 1 is based on Euclidean metric and it uses all the samples contained in HRRP:
,
where X is the radar signature of an unclassified aircraft; W is the number of possible aircrafts; Hn
(w) is the n-th segment of aircraft number w; Features based rules.Rule 2:
,
where Krw is the significance coefficient of r-th feature for w-th aircraft; Yr is the
feature number r of an unclassified aircraft; Urw is the feature number r of an
arbitrary segment n for aircraft class number w.Rule 3:
,
))()(min(minˆ 2)(
..1..1 i
wnNnWw
iHiXw
)min(minˆ 2,
..1..1 r
nwrr
wrNnWw
UYKw
)min(minˆ2
,
,
..1..1 rnw
rr
nwrrw
rNnWw UY
UYKw
Slide10 / 20
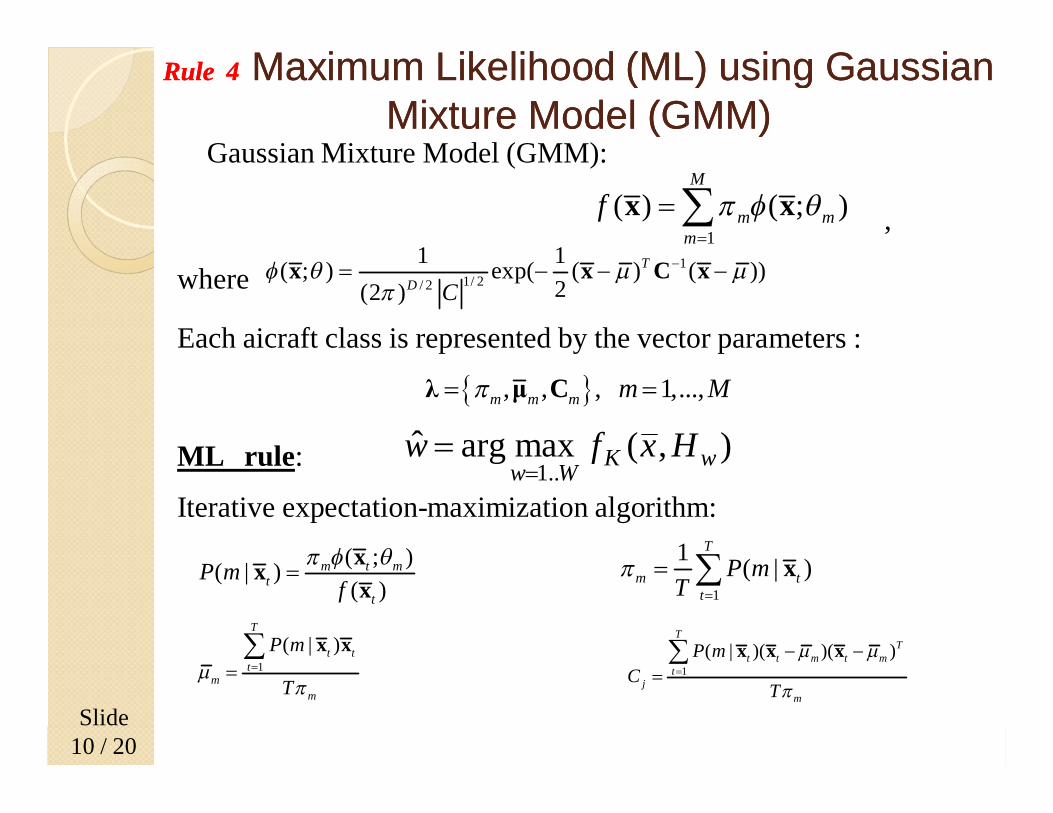
RuleRule 44 Maximum Likelihood (ML) using Gaussian Maximum Likelihood (ML) using Gaussian Mixture Model (GMM)Mixture Model (GMM)
Gaussian Mixture Model (GMM):
,
where
Each aicraft class is represented by the vector parameters :
ML rule:
Iterative expectation-maximization algorithm:
1( ) ( ; )
M
m mm
f x x
11/ 2/ 2
1 1( ; ) exp( ( ) ( ))2(2 )
TD C
x x C x
, , , 1,...,m m m m MC
( ; )( | )( )
m t mt
t
P mf
xxx 1
1 ( | )T
m tt
P mT
x
1
( | )T
t tt
mm
P m
T
x x1
( | )( )( )T
Tt t m t m
tj
m
P mC
T
x x x
),(maxargˆ..1 wKWw
Hxfw
Slide11 / 20
The initial data used in computer simulationsThe initial data used in computer simulations
- Angle-of-sight is varied from 180 degrees (aerial target nose-on aspect) to 170 degrees for each aerial target studied;
- LFM signal of Gaussian shape with pulse duration and repetition of 10 s and 1000 Hz, respectively;
- central wavelength of 3 cm and frequency bandwidth of f = 80 MHz;
- range resolution is equal to r = c/2 f = 1.875m;- horizontal polarization;- length of the window (range cell) for target tracking in range
of 80 m and equidistant range profile sample step of 0.5 m;- constant aerial target angle of bank equal to 2 degrees and
constant angle of pitch equal to 3 degrees.
11
Slide12 / 20
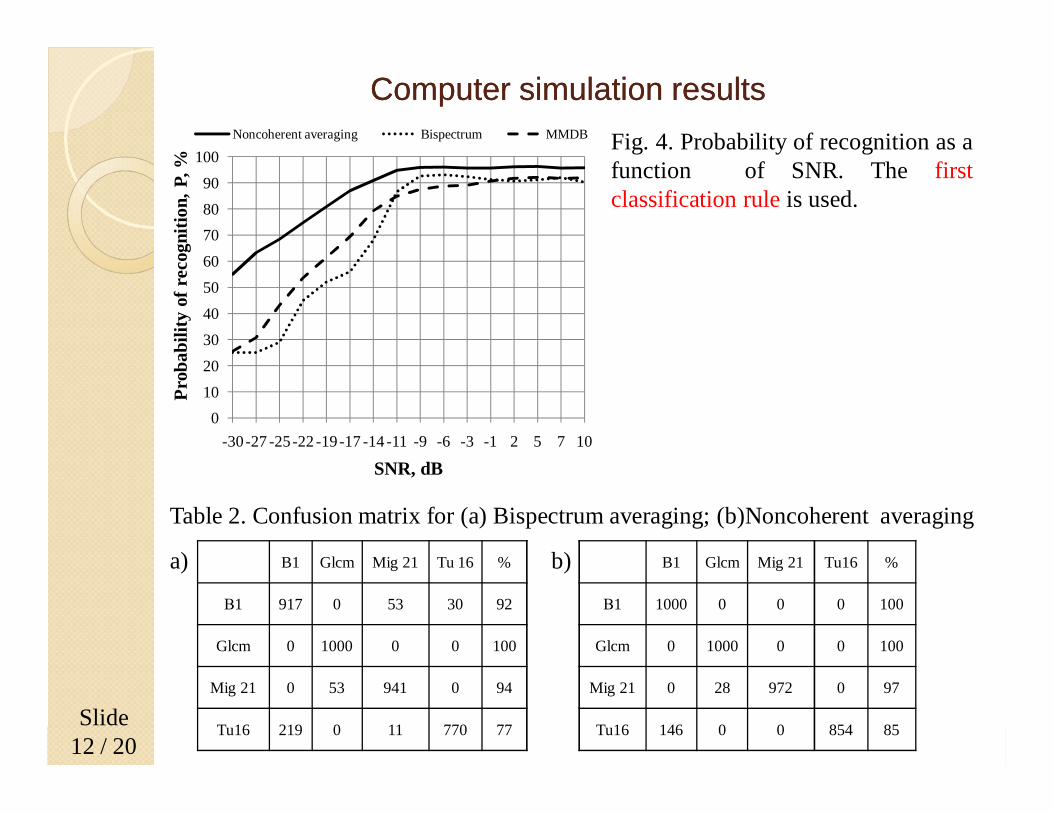
Computer simulation resultsComputer simulation results
B1 Glcm Mig 21 Tu 16 %
1 917 0 53 30 92
Glcm 0 1000 0 0 100
Mig 21 0 53 941 0 94
Tu16 219 0 11 770 77
B1 Glcm Mig 21 Tu16 %
1 1000 0 0 0 100
Glcm 0 1000 0 0 100
Mig 21 0 28 972 0 97
Tu16 146 0 0 854 85
Table 2. Confusion matrix for (a) Bispectrum averaging; (b)Noncoherent averaging
Fig. 4. Probability of recognition as afunction of SNR. The firstclassification rule is used.
0102030405060708090
100
-30-27 -25-22 -19-17 -14 -11 -9 -6 -3 -1 2 5 7 10
Prob
abili
ty o
f rec
ogni
tion,
P, %
SNR, dB
Noncoherent averaging Bispectrum MMDB
a) b)
Slide13 / 20
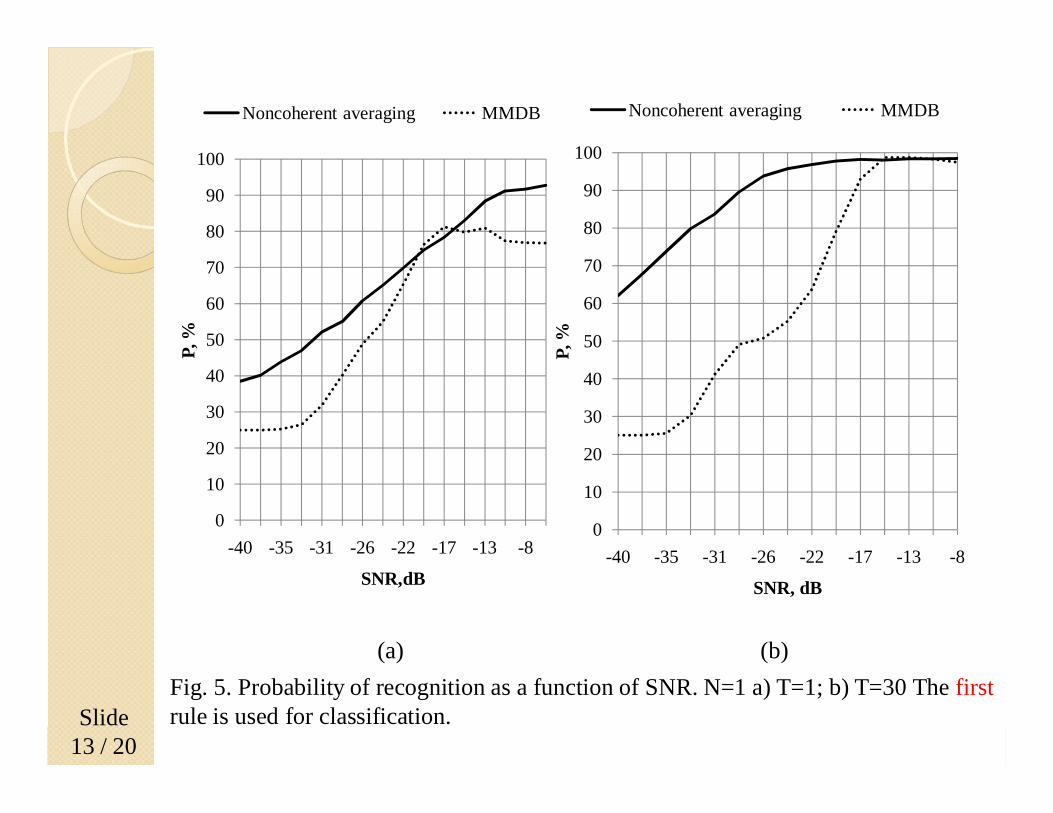
(a) (b)Fig. 5. Probability of recognition as a function of SNR. N=1 a) T=1; b) T=30 The firstrule is used for classification.
0
10
20
30
40
50
60
70
80
90
100
-40 -35 -31 -26 -22 -17 -13 -8
P, %
SNR,dB
Noncoherent averaging MMDB
0
10
20
30
40
50
60
70
80
90
100
-40 -35 -31 -26 -22 -17 -13 -8P,
%SNR, dB
Noncoherent averaging MMDB
Slide14 / 20
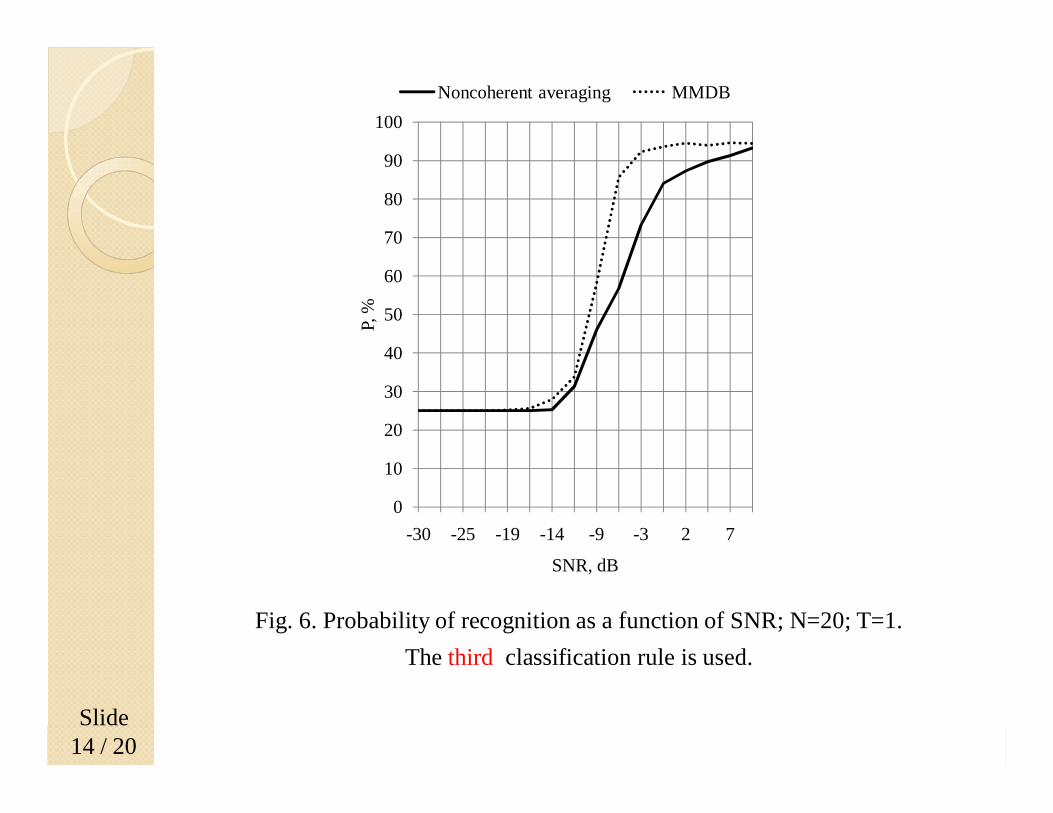
Fig. 6. Probability of recognition as a function of SNR; N=20; T=1.The third classification rule is used.
0
10
20
30
40
50
60
70
80
90
100
-30 -25 -19 -14 -9 -3 2 7
P, %
SNR, dB
Noncoherent averaging MMDB
Slide15 / 20
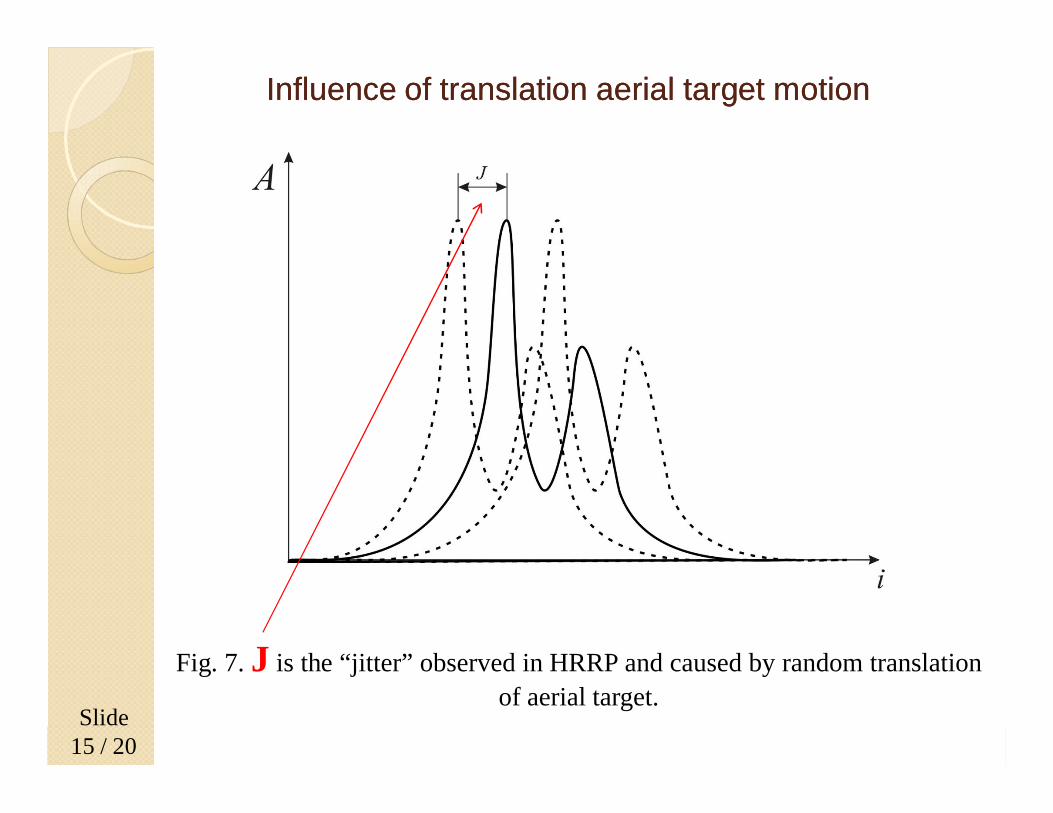
Fig. 7. J is the “jitter” observed in HRRP and caused by random translation of aerial target.
Influence of translation aerial target motionInfluence of translation aerial target motion
Slide16 / 20
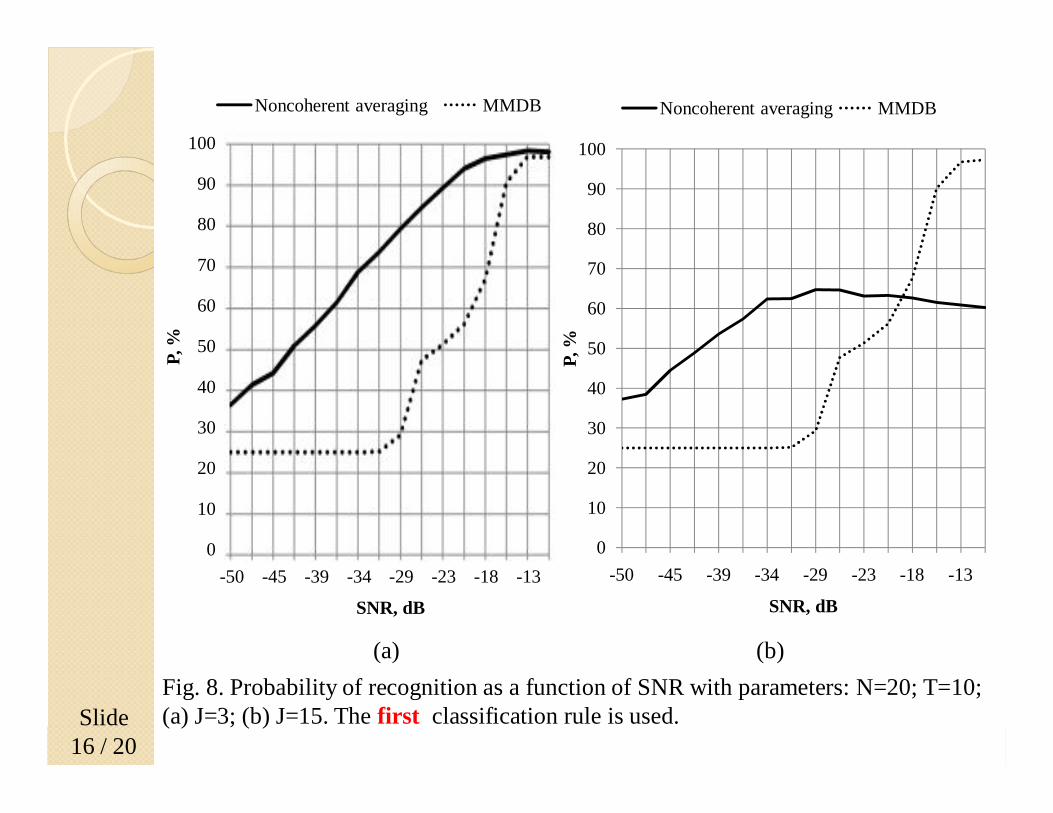
(a) (b)Fig. 8. Probability of recognition as a function of SNR with parameters: N=20; T=10; (a) J=3; (b) J=15. The first classification rule is used.
0
10
20
30
40
50
60
70
80
90
100
-50 -45 -39 -34 -29 -23 -18 -13
P, %
SNR, dB
Noncoherent averaging MMDB
0
10
20
30
40
50
60
70
80
90
100
-50 -45 -39 -34 -29 -23 -18 -13P,
%
SNR, dB
Noncoherent averaging MMDB
Slide17 / 20
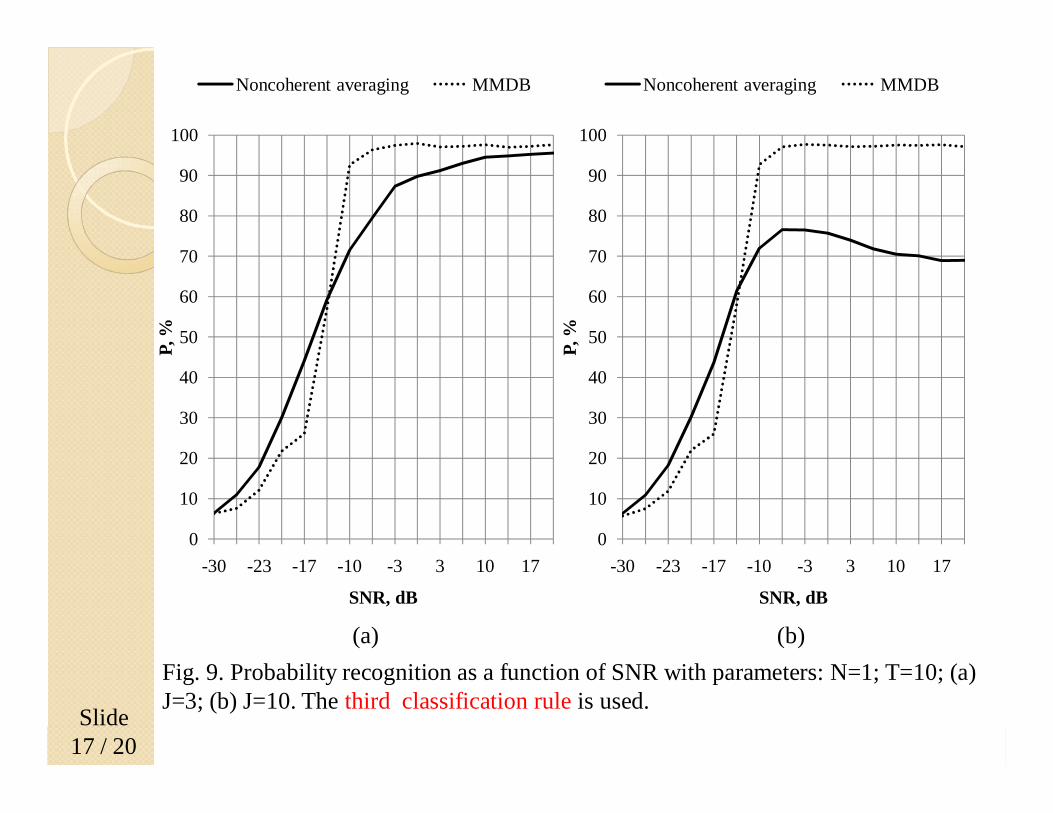
(a) (b)Fig. 9. Probability recognition as a function of SNR with parameters: N=1; T=10; (a) J=3; (b) J=10. The third classification rule is used.
0
10
20
30
40
50
60
70
80
90
100
-30 -23 -17 -10 -3 3 10 17
P, %
SNR, dB
Noncoherent averaging MMDB
0
10
20
30
40
50
60
70
80
90
100
-30 -23 -17 -10 -3 3 10 17P,
%SNR, dB
Noncoherent averaging MMDB
Slide18 / 20
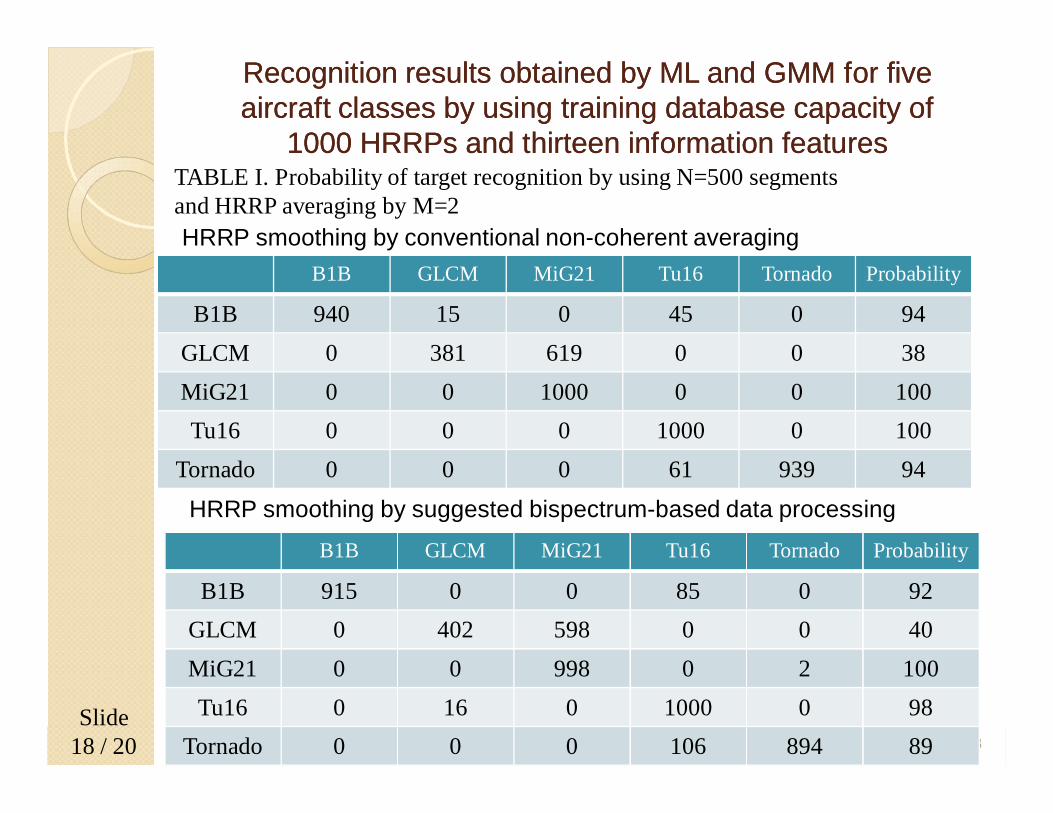
Recognition results obtained by ML and GMM for five Recognition results obtained by ML and GMM for five aircraft classes by using training database capacity of aircraft classes by using training database capacity of
1000 HRRPs and thirteen information features1000 HRRPs and thirteen information features
18
B1B GLCM MiG21 Tu16 Tornado Probability
B1B 940 15 0 45 0 94GLCM 0 381 619 0 0 38MiG21 0 0 1000 0 0 100Tu16 0 0 0 1000 0 100
Tornado 0 0 0 61 939 94
TABLE I. Probability of target recognition by using N=500 segments and HRRP averaging by M=2HRRP smoothing by conventional non-coherent averaging
B1B GLCM MiG21 Tu16 Tornado Probability
B1B 915 0 0 85 0 92GLCM 0 402 598 0 0 40MiG21 0 0 998 0 2 100Tu16 0 16 0 1000 0 98
Tornado 0 0 0 106 894 89
HRRP smoothing by suggested bispectrum-based data processing
Slide19 / 20 19
B1B GLCM MiG21 Tu16 Tornado Probability
B1B 835 45 0 120 0 84GLCM 0 271 729 0 0 27MiG21 0 0 1000 0 0 100Tu16 0 781 0 219 0 22
Tornado 0 50 4 120 826 83
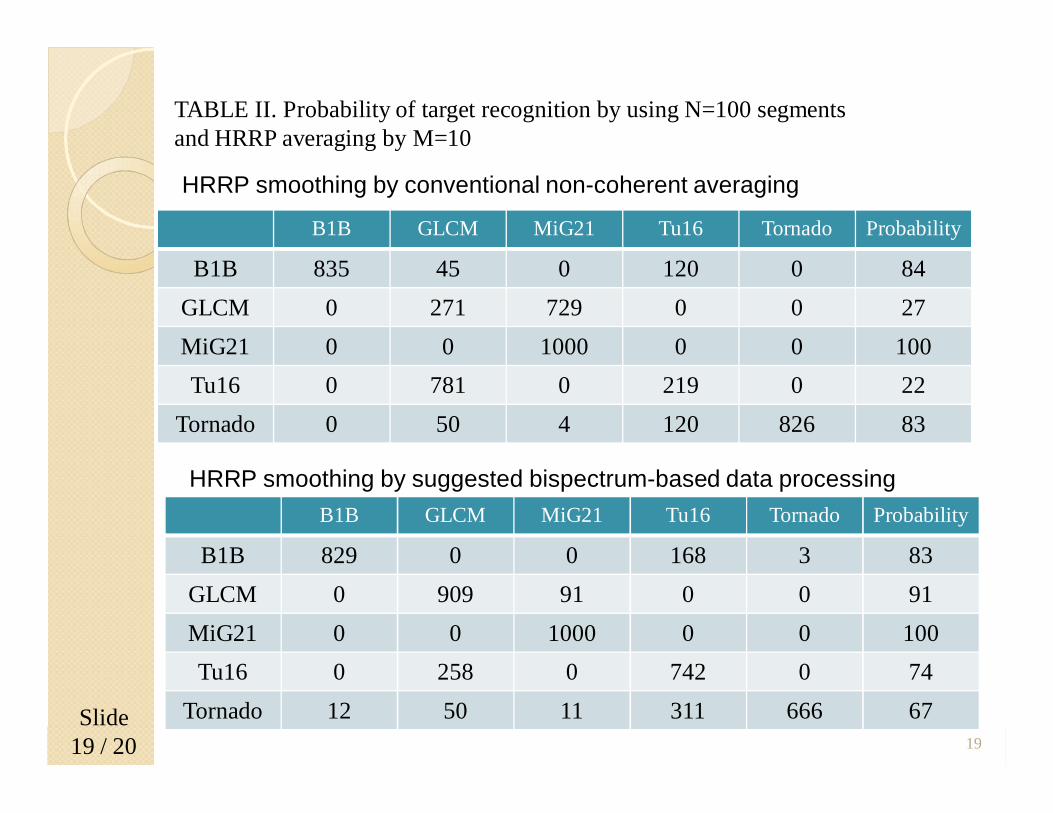
TABLE II. Probability of target recognition by using N=100 segments and HRRP averaging by M=10
HRRP smoothing by conventional non-coherent averaging
B1B GLCM MiG21 Tu16 Tornado Probability
B1B 829 0 0 168 3 83GLCM 0 909 91 0 0 91MiG21 0 0 1000 0 0 100Tu16 0 258 0 742 0 74
Tornado 12 50 11 311 666 67
HRRP smoothing by suggested bispectrum-based data processing
Slide20 / 20
ConclusionsConclusionsProbability of aerial target recognition and classification has been studiedfor two kinds of information features extracted from known non-coherentaccumulation of HRRPs and suggested bispectrum-based HRRPprocessing techniques in additive Gaussian noise, random translations ofaerial target environment, and in range ambiguity.In case of absence of random translation of aerial target and rangeambiguity, probability performance provided by known non-coherentaccumulation of HRRPs exceeds the performance of suggestedbispectrum-based technique for the first and second classification rulesconsidered. At the same time, information features extracted from themain modified diagonal of bispectrum (MMDB) provide the benefit inSNR equal to 8 dB for fixed probability of recognition equal to 90%.Invariance property of bispectrum-based approach to random translationsof aerial target and radar range ambiguity has been demonstrated.Maximum value of probability of recognition for bispectrum-basedtechnique overcomes known technique approximately per 30% even forrandom HRRP spatial shift equal to 2% of HRRP total length.Recognition tends to decreasing from 85% to 63% with increasing ofaveraged number M of HRRPs from M=2 to M=10 for informationfeatures extracted from smoothed HRRPs by noncoherent averaging.Probability of target recognition varies insignificantly from 84% to 83%with the mentioned increasing of number M. This result can be explainedby low sensitivity to HRRP variability for bispectrum-based dataprocessing and, hence, more robust properties of proposed informationfeatures.