automated port handling systems - gacc · pdf fileautomated port handling systems ahk...
TRANSCRIPT

WWW.iSAM-AG.DE
Automated Port Handling SystemsAHK Symposium, 04. April 2017, Houston USA
Dr. Jürgen Hellmich, CEO iSAM AG

WWW.iSAM-AG.DE
About the Company
90+ employees (group), mostly engineers, physicists and software developers
More than 30 years experience
Globally operating, main customers in Europe, South-East Asia, Russia, North America and Australia
Leading supplier of advanced port automation systems in Europe and North America
Offering the full range of automation systems including field equipment, electrical cabinets, PLC and Level 2 systems
2
iSAM AG - WE DELIVER SOLUTIONS
iSAM AGAlexanderstraße 4645472 Mülheim an der RuhrGermany
iSAM North America Corp.500 Broadcast DriveMobile, Alabama 36606USA
iSAM Asia Pacific Pty LtdLevel 21, Riverside Centre 123 Eagle StBrisbane, QLD 4000Australia
iSAM Automation Canada Corp.# 1601 - 290 Newport DrivePort Moody, British ColumbiaV3H 5N2Canada
WWW.iSAM-AG.DE
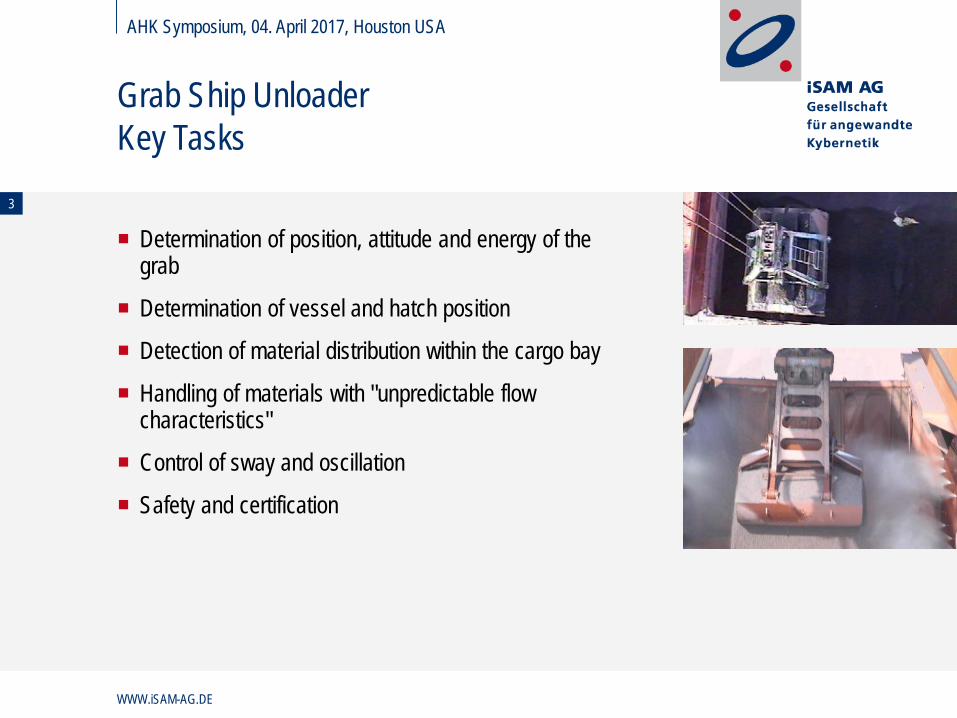
Grab Ship UnloaderKey Tasks
Determination of position, attitude and energy of the grab
Determination of vessel and hatch position
Detection of material distribution within the cargo bay
Handling of materials with "unpredictable flow characteristics"
Control of sway and oscillation
Safety and certification
3
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
Grab Ship UnloaderTechnology
3D laser scanner to determine simultaneously position of grab, vessel, hatch and material
Real-time image processing to extract cables and grab from 3D scan data and accurately determine sway angle and grab attitude (rotation)
RTK-GNSS to determine accurate crane position
Multiple strategy modules for different materials
Redundant evaluation with PC and PLC to create safe areas for movement of personnel on the ship
4
AHK Symposium, 04. April 2017, Houston USA
WWW.iSAM-AG.DE
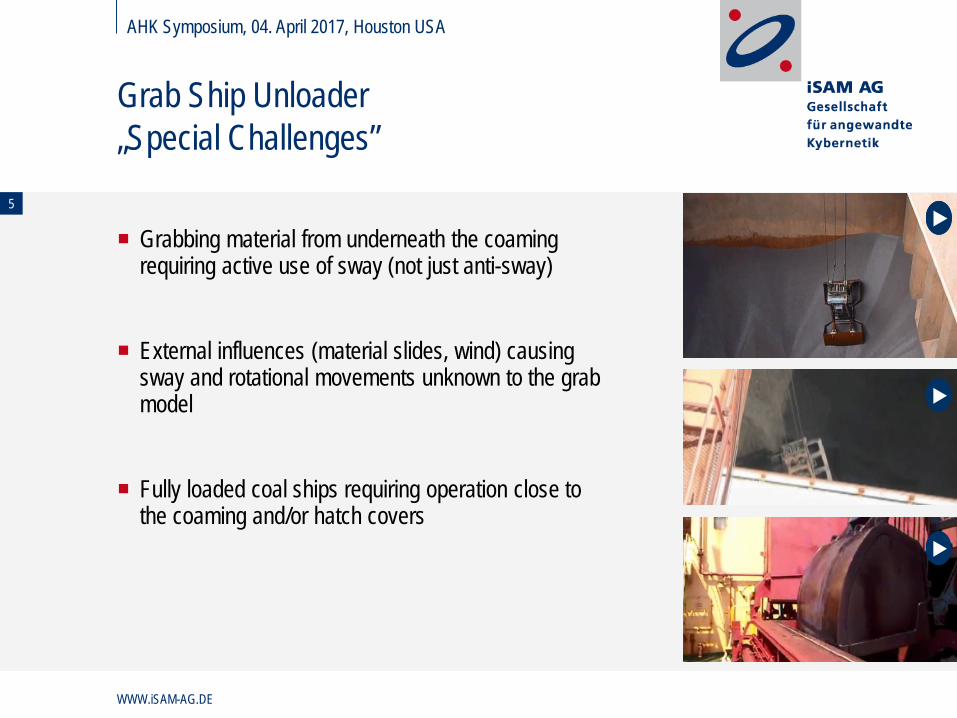
Grab Ship Unloader„Special Challenges”
Grabbing material from underneath the coaming requiring active use of sway (not just anti-sway)
External influences (material slides, wind) causing sway and rotational movements unknown to the grab model
Fully loaded coal ships requiring operation close to the coaming and/or hatch covers
5
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
First 3D Laser Measurement taken by iSAMat a Container STS Crane
6
3D scanner mounted to operator cabin of STS crane
Field of view allowing for scanning containers on shore and on ship
Spreader and ropes are visible in scan image at all times allowing for real-time image processing to extract cables and spreader from 3D scan data and accurately determine sway angle and attitude (rotation)
Distance between spreader / container and “surface” below can be automatically determined
AHK Symposium, 04. April 2017, Houston USA
WWW.iSAM-AG.DE
7
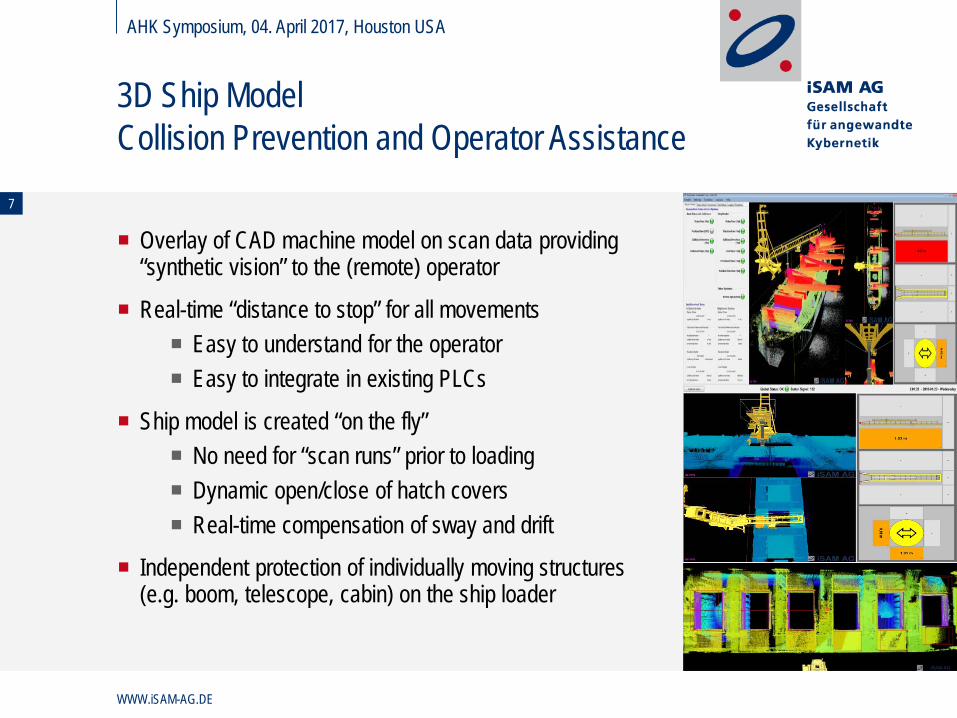
3D Ship ModelCollision Prevention and Operator Assistance
Overlay of CAD machine model on scan data providing “synthetic vision” to the (remote) operator
Real-time “distance to stop” for all movements Easy to understand for the operator Easy to integrate in existing PLCs
Ship model is created “on the fly” No need for “scan runs” prior to loading Dynamic open/close of hatch covers Real-time compensation of sway and drift
Independent protection of individually moving structures (e.g. boom, telescope, cabin) on the ship loader
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
8
Unmanned Automation (UA)Ship Loader Process Technology
„True“ automation without operator intervention
Continuous measurement of ship attitude and cargo distribution
Pre-set loading plans and patterns with automatic adaption to actual load
Optional remote control on the ship for better integration of the stevedores Changes in hatch loading sequence Final trim phase in cooperation with the ship
officers System remains in auto mode with full
protection during trimming
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
9
UA for Export TerminalsImplementation for Seagoing Vessels
Multi-stage approach 3D ship model based manual remote control + Automatic hatch loading + Automatic relocation + Automatic loading below the coaming (coal only) + Semi-automatic trimming
Automatic control of all machine movements for even product distribution and roll control
Automatic shortest / fastest path calculation for hatch relocation Prediction for required product gap on feeding belts can be optimized
Positioning logic gets split into control system and machine PLC Positioning commands calculated by control system based on model data Positioning itself gets implemented in and executed by the PLC
AHK Symposium, 04. April 2017, Houston USA
WWW.iSAM-AG.DE
10
AHK Symposium, 04. April 2017, Houston USA
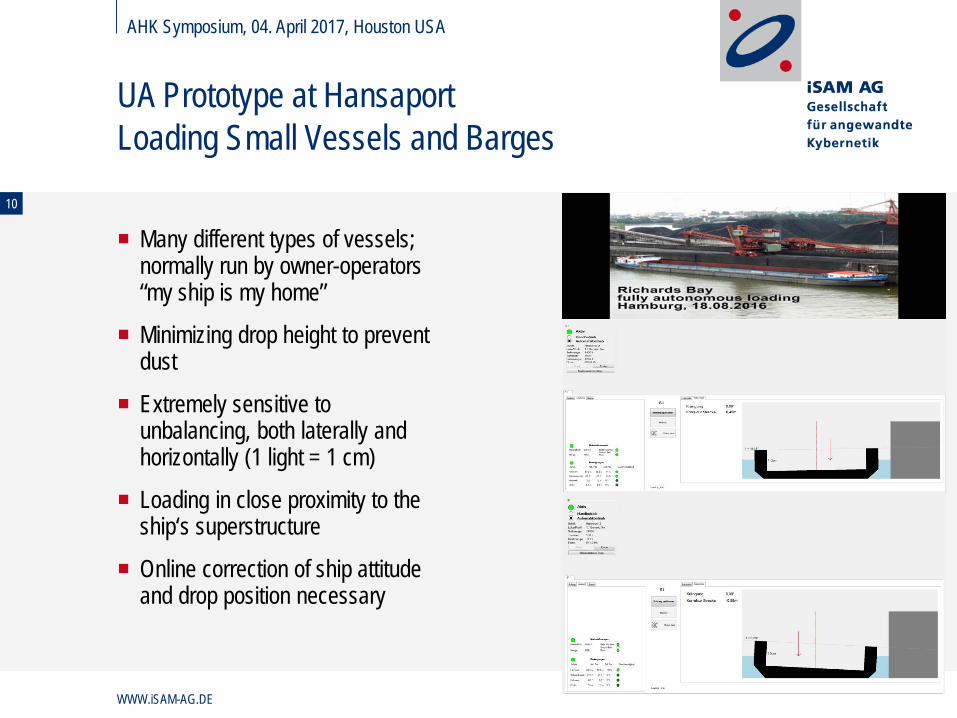
UA Prototype at HansaportLoading Small Vessels and Barges
Many different types of vessels; normally run by owner-operators“my ship is my home”
Minimizing drop height to prevent dust
Extremely sensitive to unbalancing, both laterally and horizontally (1 light = 1 cm)
Loading in close proximity to the ship‘s superstructure
Online correction of ship attitude and drop position necessary
WWW.iSAM-AG.DE
11
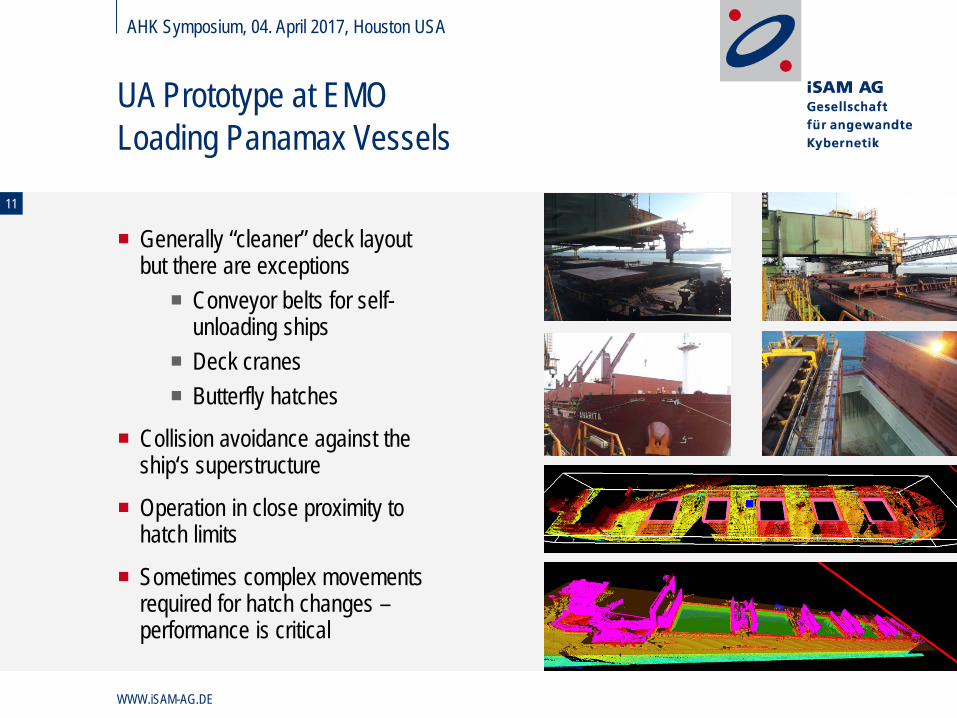
UA Prototype at EMOLoading Panamax Vessels
Generally “cleaner” deck layout but there are exceptions Conveyor belts for self-
unloading ships Deck cranes Butterfly hatches
Collision avoidance against the ship‘s superstructure
Operation in close proximity to hatch limits
Sometimes complex movements required for hatch changes –performance is critical
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
Performances and return of invest
AHK Symposium, 04. April 2017, Houston USA
12

WWW.iSAM-AG.DE
Performances and return of invest
AHK Symposium, 04. April 2017, Houston USA
13
[t] brutto t/h netto t/h
E0 – Auto 37299,35 28:47:02 1296 24:47:56 1504
E0 – Hand 13587,65 12:11:57 1114 10:04:50 1348
E1 – Auto 34846,21 25:51:17 1348 23:39:48 1473
E1 – Hand 10806,75 9:02:41 1195 7:58:56 1354
E2 – Auto 23876,27 18:19:17 1303 16:27:57 1450
E2 – Hand 7577,86 6:37:02 1145 6:04:04 1249
Zeitraum: 05.03.2011 – 07.03.2011E0/E1: Sa 06:30 – Mo 13:00E2: Sa 13:20 – Mo 12:40 Material: S.O. PelletsAbmessungen: 282 m x 45 mEntladung: 75 % Automatik, 25 % HandZeit: 52 h für 135.534 t mit 3 Brücken => 2.606 t/h
Prozentuale Steigerung von Hand auf Automatikbetrieb: E0 -> 16% brutto / 12% nettoE1 -> 12% brutto / 9% nettoE2 -> 13% brutto / 16% netto

WWW.iSAM-AG.DE
14
Goals
Market analysis for interests and demands in the states of Texas and Louisiana
Meetings and discussions with potential clients within the states to talk about their needs, their demands and future outlook in terms of automation
Meetings and discussions with potential cooperation partners for the utilization of network sharing experience as well as finding help in terms of sales and projects
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DEiSAM AG · ALEXANDERSTRASSE 46 · D-45472 MÜLHEIM AN DER RUHR · FON +49 (0) 208 49 585-0 · FAX +49 (0) 208 49 585-49 · WWW.iSAM-AG.DE
Thank youfor your attention

WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA
WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA

WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA
WWW.iSAM-AG.DE
AHK Symposium, 04. April 2017, Houston USA