automated image registration using morphological region of interest feature extraction antonio plaza...
TRANSCRIPT

Applied Information SciencesAutomated Image Registration Using Morphological Region of
Interest Feature Extraction
Antonio PlazaUniversity of Extremadura. Caceres, Spain
Jacqueline Le MoigneNASA Goddard Space Flight Center, USA
Nathan NetanyahuBar-Ilan University, Israel & University of Maryland, USA

Automatic Multiple Source
Integration
Prediction Models
Satellite, Aircraft and Field Data
Improved Data Sets
Validation & Verification
Feedback
Design of FutureIntelligent
Sensor Webs
Earth Science Data Integration

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 3
What is Image Registration ?
• Navigation or Model-Based Systematic Correction– Orbital, Attitude, Platform/Sensor Geometric Relationship,
Sensor Characteristics, Earth Model, ...
• Image Registration or Feature-Based Precision Correction– Navigation within a Few Pixels Accuracy– Image Registration Using Selected Features (or Control Points)
to Refine Geo-Location Accuracy
• 2 Approaches:(1) Image Registration as a Post-Processing (Taken here)(2) Navigation and Image Registration in a Closed Loop

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 4
Image Registration Challenges
• Multi-Resolution / Mono- or Multi-Instrument• Multi-temporal data• Various spatial resolutions• Various spectral resolutions
• Sub-Pixel Accuracy• 1 pixel misregistration=> 50% error in NDVI computation
• Accuracy Assessment• Synthetic data• "Ground Truth" (manual registration?)• Use down-sampled high-resolution data• Consistency ("circular" registrations) studies

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 5
Image to Image Registration
Incoming Data Image Characteristics(Features) Extraction
• Multi-Temporal Image Correlation• Landmarking• Coregistration
FeatureMatching
Compute Transform

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 6
Image to Map Registration
Input Data
Map
Masking andFeature Extraction
Feature Matching
Compute Transform
Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 7
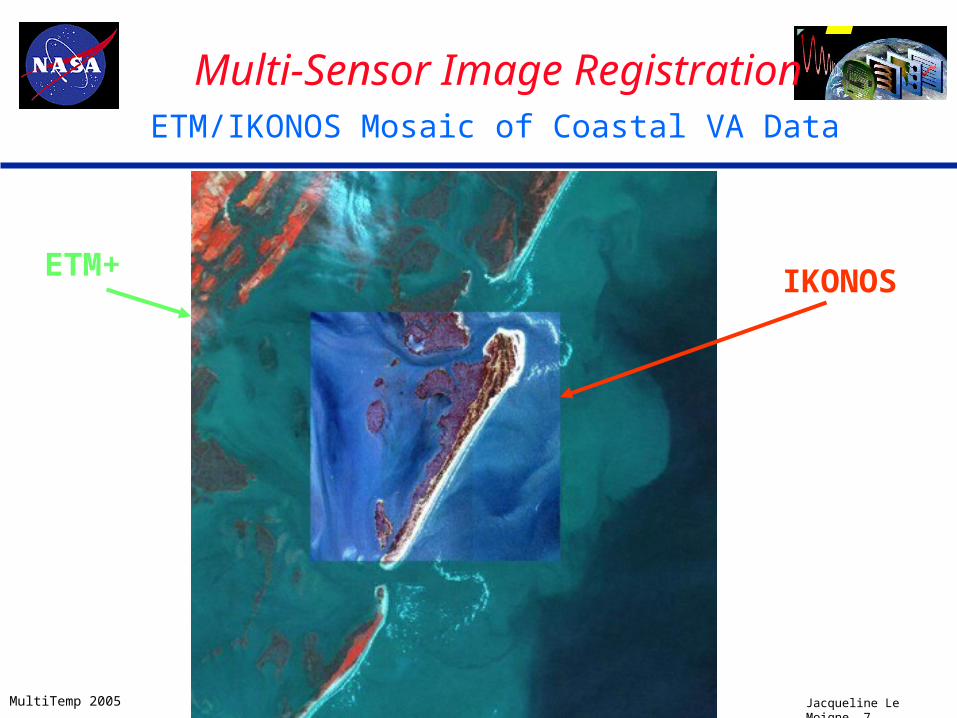
Multi-Sensor Image RegistrationETM/IKONOS Mosaic of Coastal VA Data
IKONOSETM+

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 8
Image Registration Components
0 Pre-Processing• Cloud Detection, Region of Interest Masking, ...
1 Feature Extraction (“Control Points”)• Edges, Regions, Contours, Wavelet Coefficients, ...
2 Feature Matching• Spatial Transformation (a-priori knowledge)• Search Strategy (Global vs Local, Multi-
Resolution, ...)• Choice of Similarity Metrics (Correlation, Optimization
Method, Hausdorff Distance, ...)
3 Resampling, Indexing or Fusion

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 9
Image Registration Subsystem Based on a Chip Database
LandmarkChip
Database
UTM of 4 Scene Corners Known from Systematic Correction
Correct UTM of
4 Chip Corners
Input Scene(1) Find Chips that Correspond to the Incoming Scene(2) For Each Chip, Extract Window from Scene, Using UTM of: - 4 Approx Scene Corners - 4 Correct Chip Corners(3) Register Each (Chip,Window) Pair and Record Pairs of Registered Chip Corners(4) Compute Global Registration from Multiple Local Ones(5) Compute Correct UTM of 4 Scene Corners of Input Scene

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 10
Image Registration Subsystem Based on Automatic Chip Extraction
UTM of 4 Scene Corners Known from Systematic Correction
Input Scene
(1) Extract Reference Chips and Corresponding Input Windows Using
Mathematical Morphology
(2) Register Each (Chip,Window)
Pair and Record Pairs of Registered Chip Corners (refinement step)
(3) Compute Global Registration
from Multiple Local Ones
(4) Compute Correct UTM of 4 Scene Corners of Input Scene
Reference Scene
Advantages:• Eliminates Need for Chip Database• Cloud Detection Can Easily be Included in Process• Process Any Size Images• Initial Registration Closer to Final Registration => Reduces Computation Time and Increases Accuracy.

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 11
Step 1: Chip-Window Extraction Using
Mathematical MorphologyMathematical Morphology (MM) Concept: • Nonlinear spatial-based technique that provides a framework.
• Relies on a partial ordering relation between image pixels.
• In greyscale imagery, such relation is given by the digital value of image pixels
Structuring element
Dilation
3x3 structuring elementdefines neighborhood aroundpixel P
Erosion
Max Min
P
Original image
Dilation
3x3 structuring element defines neighborhood around pixel P
Erosion
Max Min
P
Original image
Original image
Erosion
K K
Dilation
(4-pixel radius Disk SE)
Greyscale MM Basic Operations:

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 12
Step 1 (Cont.)
Structuring element
Binary Erosion
Structuring element
Structuring element

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 13
Step 1 (Cont.)
Structuring element
Binary Dilation
Structuring element
Structuring element

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 14
K
Greyscale Morphology: Combined Operationse.g., Erosion + Dilation = Opening
Step 1 (Cont.)

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 15
Step 1: Chip-Window Extraction Using
Mathematical Morphology• Scale-Orientation Morphological Profiles (SOMP): From Openings
and Closings with SEs=Line Segments of Different Orientations – SOMP = Feature Vector D(x,y) at each Pixel (various scales & orientations) – Entropy of D(x,y) = H(D(x,y))
• Algorithm:a. Compute D(x,y) for each (x,y) in reference sceneb. Extract reference chip centered around (x’,y’) with Max[H(D(x’,y’))], e.g.
256x256c. Compute D(X,Y) for each (X,Y) in search area input scene centered (e.g.,
1000x1000) around location (x’,y’)d. Compute RMSE(D(X,Y),D(x’,x’)) for all (X,Y) in search areae. Extract input window centered around (X’,Y’) with Min(RMSE)f. Return to step 2. until predefined number of chips is extracted
Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 16
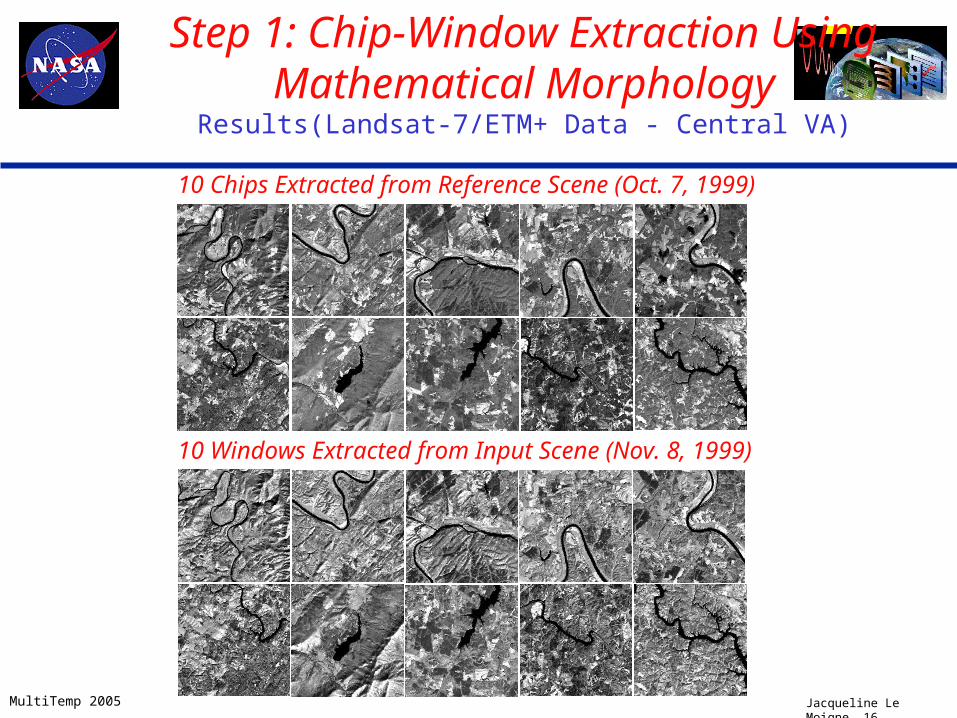
Step 1: Chip-Window Extraction Using
Mathematical MorphologyResults(Landsat-7/ETM+ Data - Central VA)
10 Chips Extracted from Reference Scene (Oct. 7, 1999)
10 Windows Extracted from Input Scene (Nov. 8, 1999)

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 17
Step 2: Chip-Window RefinedRegistration Using Robust Feature Matching
Reference Chip
Input Window
WaveletDecomposition
WaveletDecomposition
Robust Feature Matching (RFM)
UsingHausdorff Distance
MaximaExtraction
MaximaExtraction
Choice ofBest
Transformation
At EachLevel ofDecomposition{
• Overcomplete Wavelet-type Decomposition: Simoncelli Steerable Pyramid• “Maxima” Extraction: Top 5% of Histogram
Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 18
Step 2: Robust Feature Matching Using Hausdorff Distance
• Search Transformation Space through Hierarchical Spatial Subdivisions
• Perform Monte Carlo Sampling of Control Points
• Compute Robust Similarity Measure- k-th smallest squared distance to nearest neighbors, i.e., partial
Hausdorff DistancePartial Hausdorff Distance:
Hk(A, B) = Kth a in A minb in B dist (a,b)
(1≤ k ≤ |A|; Kth is the kth smallest element of set; dist(a,b): Euclidean distance)
• Prune Search Space by "Range" Similarity Estimates
• Iterate and Refine on each Level of Wavelet Decomposition

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 19
• From each Local Registration, Window-Chip:• Corrected Locations of Four corners of Each Window• i.e.: for each chip-window i, pair correspondences:
– (UL_i_X1,UL_i_Y1) to (UL_i_X2,UL_i_Y2)– (UR_i_X1,UR_i_Y1) to (UR_i_X2,UR_i_Y2)– (LL_i_X1,LL_i_Y1) to (LL_i_X2,LL_i_Y2)– (LR_i_X1,LR_i_Y1) to (LR_i_X2,LR_i_Y2)
• Use of a Least Mean Square (LMS) Procedure to Compute Global Image Transformation (in pixels)
• If n chips, 4n points used for the LMS
=> Step 4: Use Global Transformation to Compute new UTM Coordinates for each of the 4 Corners of the Incoming Scene
Step 3: Compute Global Registrationfrom All Local Registrations

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 20
Table I Registration Results Obtained for Ten Chip-Window Pairs
From Two Landsat Scenes in Central Virginia
Chip-window
Rotation (deg)
Initial Shift x
Initial Shift y Adjusted Shift x
Adjusted Shift y
(a) 0.0 12.0 4.0 14.0 1.0
(b) 0.0 -1.0 0.0 13.0 1.0
(c) 0.0 2.0 -2.0 13.0 1.0
(d) 0.0 0.0 0.0 13.0 1.0
(e) 0.0 -1.0 3.0 13.0 1.0
(f) 0.0 59.0 1.0 14.0 1.0
(g) 0.0 -3.0 -3.0 13.0 1.0
(h) 0.0 0.0 0.0 13.0 2.0
(i) 0.0 36.0 4.0 14.0 2.0
(j) 0.0 2.0 -2.0 13.0 1.0
Results of Global RegistrationOn Landsat-7 VA Test Data

Applied Information Sciences
MultiTemp 2005 Jacqueline Le Moigne, 21
Conclusions
• Fully Automated System for Registration of Multi-Temporal Landsat Scenes of Any Size, Using Mathematical Morphology and Robust Feature Matching Techniques
• MM Chip-Window Extractor Can be Used with Any Other Registration Method
• Eliminates Need of Database
• Provides Close Initial Match => Follow-up Computations Faster and More Accurate
• Further Experimentation On-Going