auslegung eines mehrgängigen planetenkoppelgetriebes in ... · atk 2013 2 1 english abstract zg -...
TRANSCRIPT

Auslegung eines mehrgängigen Planetenkoppelgetriebes
in der FVA-Workbench©
Dimensioning of an multi-speed compound planetary
transmission with the FVA-Workbench©
Dr.-Ing. Christian Wirth
Dipl.-Ing. Dariush Kiani


Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
Inhaltsverzeichnis
1 English Abstract ................................................................................................. 2
2 Einleitung............................................................................................................. 3
3 Planetenkoppelgetriebe ..................................................................................... 3
3.1 Leistungsaufteilung....................................................................................... 4
3.2 Leistungsverzweigung .................................................................................. 6
3.3 Getriebesynthese ......................................................................................... 9
3.4 Zweigängiges, leistungsverzweigtes Schaltgetriebe..................................... 9
4 Auslegung in der FVA-Workbench© ................................................................ 13
4.1 Übersicht .................................................................................................... 13
4.2 Funktionalitäten .......................................................................................... 14
4.2.1 GEAS ............................................................................................ 14
4.2.2 STplus ........................................................................................... 14
4.2.3 RIKOR ........................................................................................... 16
5 Zusammenfassung ........................................................................................... 19
6 Literaturverzeichnis .......................................................................................... 20

ATK 2013
2
1 English Abstract
ZG - Zahnräder und Getriebe GmbH has developed a special computer program for
the gear synthesis of planetary gears. By means of this program a new gear structure
was generated for an electric axle gear drive that is designed for very high output tor-
ques and two speed ratios. It is built up of three coaxial planetary gears sets. The first
stage distributes the input power to the second and third stage. The differential gear is
combined by a common shaft with stage two and three. Hence the output torque of the
axle gear drive is provided by two planetary gear stages. This arrangement leads to
very high output torques and a high power density related to weight and volume.
For this new concept ZG did a feasibility study. The aim was to predict reliably the di-
mensions, the weight and the load capacity of the gear. The load capacity of the bear-
ings and the gear stages is decisive for the whole gear drive. Thus to design these el-
ements the whole gear arrangement was modeled in the FVA-Workbench©.
The FVA-Workbench© is the software solution of the “Forschungsvereinigung Antrieb-
stechnik e.V.” (FVA). It provides the current program versions of the FVA together with
a convenient graphic user interface. The-FVA-Workbench© administers not only the
input and output data of the programs, but provides the data-transfer between the pro-
grams. Results of one program are handed over to the following in an appropriate way.
So far the FVA programs that are substantial for the gear design like STplus, KNplus,
RIKOR, STIRAK and DZP are integrated with their basic functionalities. Rolling ele-
ment bearings can be designed with LAGER2, sliding bearings with ALP3T. It is the
target to integrate gradually all programs provided by FVA into the FVA-Workbench©
and to provide the user with a software solution for the system-design of transmis-
sions.
The actual version of the FVA-Workbench© allows (among other things) the modeling
of single and compounded planetary gear structures. With clutches switchable gear
ratios can be provided. By means of the appropriate kernels the calculation of the
bearing life time is possible as well as the geometry and the load capacity of the gears.
Even flank form modifications can be reliably designed by considering the deflections
and the load distribution in the tooth to tooth contact.
This paper describes firstly the principle of the new gear structure by explaining some
fundamentals of coupled planetary gears. Secondly the functionality of the FVA-
Workbench© regarding planetary gears is explained by some exemplary calculations.

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
2 Einleitung
Die Zahnräder und Getriebe GmbH (ZG) hat mit ihrem Getriebesyntheseprogramm
einen koaxialen, zweigängigen, elektrischen Achsantrieb für Pkw konzipiert. Aufgrund
der im Getriebe vorgesehenen Leistungsteilung zwischen mehreren Planetengetrieben
ist das Getriebe grundsätzlich für sehr hohe Antriebsmomente geeignet. Die Gänge
können über Lamellenbremsen geschaltet werden. Diese können hydraulisch oder
elektromechanisch aktuiert werden.
Im Rahmen einer Machbarkeitsstudie wurde das Potential des Getriebes näher unter-
sucht. Im Fokus stand dabei die mögliche Leistungsdichte des Getriebes, wenn es für
einen praxisnahen Bauraum und sinnvolle Gangübersetzungen für elektrische Antriebe
ausgelegt wird. Das Getriebe wurde mit einem groben Detaillierungsgrad in 3D-CAD
abgebildet. Um verlässliche Ergebnisse hinsichtlich der Bauteildimensionierung zu er-
halten, wurden die kritisch belasteten Maschinenelemente vergleichsweise detailliert
nachgerechnet. Dies betrifft insbesondere die Verzahnungen und die Lager, da diese
für die Abmaße des Getriebes wesentlich sind.
Zur Auslegung der Verzahnungen und Lager wurde die FVA-Workbench© verwendet.
Da die FVA-Workbench© die Modellierung von Planeten- und Planetenkoppelgetrie-
ben ermöglicht, die über eine oder mehrere Wellen miteinander verbunden sein kön-
nen, konnte die gesamte Getriebeeinheit komfortabel nachgerechnet werden.
Um die Funktionsweise des vorgestellten Getriebes besser nachvollziehen zu können,
wird zunächst auf die Grundlagen gekoppelter und leistungsverzweigter Planetenge-
triebe eingegangen. Im Anschluss daran werden ausgewählte Berechnungsschritte in
der FVA-Workbench© beispielhaft erläutert.
3 Planetenkoppelgetriebe
Planetengetriebe werden aufgrund ihrer koaxialen und in Bezug auf deren Tragfähig-
keit kompakten Bauweise, der Möglichkeit extrem hohe und oder niedrige Übersetzun-
gen in einer oder wenigen Planetenradstufen darstellen zu können, und wegen ihrer
vielfältigen Einsatzmöglichkeiten als Übersetzungs-, Überlagerungs- und Schaltgetrie-
be in vielen Bereichen der Antriebstechnik eingesetzt [VDI2157_12].
Koaxiale elementare Umlaufgetriebe sind Planetengetriebe, die aus genau zwei Zent-
ralrädern und einem Steg bestehen, der mindestens einen Planet enthält über den
beide Zentralwellen verbunden sind.
Elementare Umlaufgetriebe können mit weiteren Umlaufgetrieben oder mit einfachen
Übersetzungsgetrieben mit festen Achsen zu größeren Getriebeeinheiten zusammen-
gesetzt werden [MÜLLER98]. Generell besteht die Möglichkeit, zwei elementare Um-
laufgetriebe über eine oder höchstens zwei Wellen miteinander zu koppeln. Die resul-
tierenden Leistungsflüsse im Getriebeverbund können -je nach Verschaltung und Auf-
ATK 2013
4
bau der Getriebe- unterschieden werden nach „Leistungsaufteilung“ und „Leistungs-
verzweigung“. Diese Begriffe sind im Folgenden erläutert.
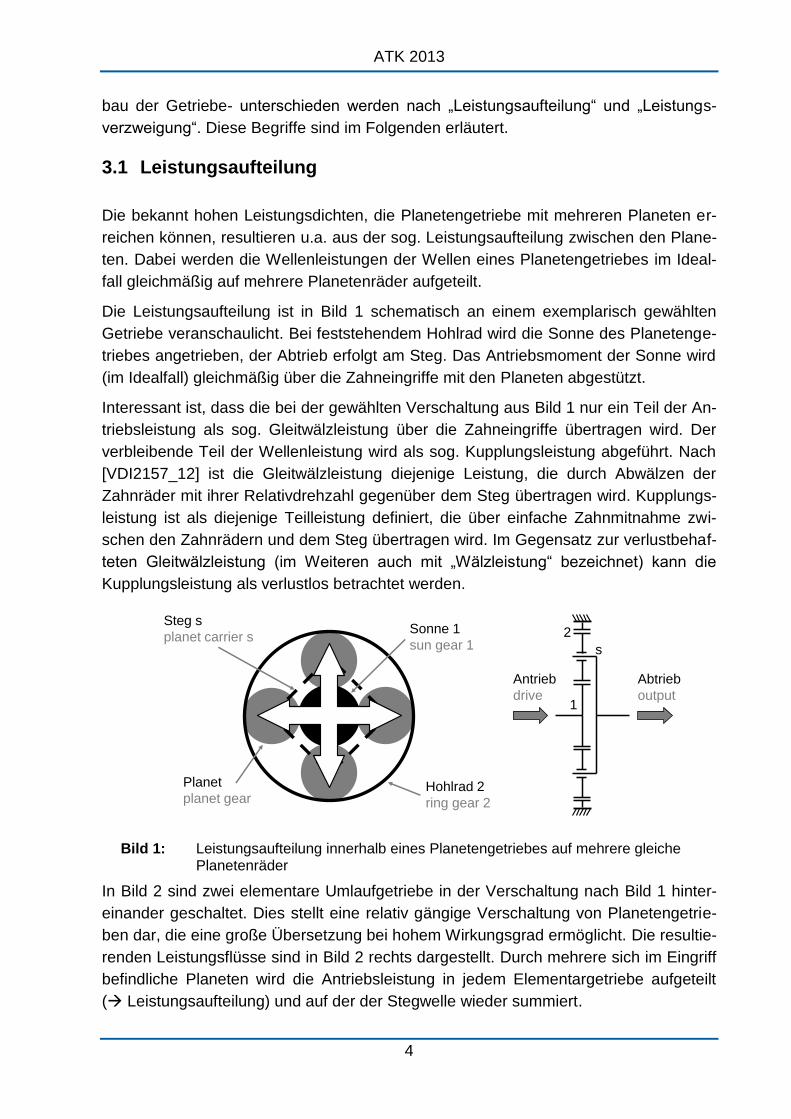
3.1 Leistungsaufteilung
Die bekannt hohen Leistungsdichten, die Planetengetriebe mit mehreren Planeten er-
reichen können, resultieren u.a. aus der sog. Leistungsaufteilung zwischen den Plane-
ten. Dabei werden die Wellenleistungen der Wellen eines Planetengetriebes im Ideal-
fall gleichmäßig auf mehrere Planetenräder aufgeteilt.
Die Leistungsaufteilung ist in Bild 1 schematisch an einem exemplarisch gewählten
Getriebe veranschaulicht. Bei feststehendem Hohlrad wird die Sonne des Planetenge-
triebes angetrieben, der Abtrieb erfolgt am Steg. Das Antriebsmoment der Sonne wird
(im Idealfall) gleichmäßig über die Zahneingriffe mit den Planeten abgestützt.
Interessant ist, dass die bei der gewählten Verschaltung aus Bild 1 nur ein Teil der An-
triebsleistung als sog. Gleitwälzleistung über die Zahneingriffe übertragen wird. Der
verbleibende Teil der Wellenleistung wird als sog. Kupplungsleistung abgeführt. Nach
[VDI2157_12] ist die Gleitwälzleistung diejenige Leistung, die durch Abwälzen der
Zahnräder mit ihrer Relativdrehzahl gegenüber dem Steg übertragen wird. Kupplungs-
leistung ist als diejenige Teilleistung definiert, die über einfache Zahnmitnahme zwi-
schen den Zahnrädern und dem Steg übertragen wird. Im Gegensatz zur verlustbehaf-
teten Gleitwälzleistung (im Weiteren auch mit „Wälzleistung“ bezeichnet) kann die
Kupplungsleistung als verlustlos betrachtet werden.
Bild 1: Leistungsaufteilung innerhalb eines Planetengetriebes auf mehrere gleiche Planetenräder
In Bild 2 sind zwei elementare Umlaufgetriebe in der Verschaltung nach Bild 1 hinter-
einander geschaltet. Dies stellt eine relativ gängige Verschaltung von Planetengetrie-
ben dar, die eine große Übersetzung bei hohem Wirkungsgrad ermöglicht. Die resultie-
renden Leistungsflüsse sind in Bild 2 rechts dargestellt. Durch mehrere sich im Eingriff
befindliche Planeten wird die Antriebsleistung in jedem Elementargetriebe aufgeteilt
( Leistungsaufteilung) und auf der der Stegwelle wieder summiert.
Antrieb
drive
Abtrieb
output
2
s
1
Sonne 1
sun gear 1
Hohlrad 2
ring gear 2
Planet
planet gear
Steg s
planet carrier s

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
Bild 2: Planetenkoppelgetriebe mit Einfachkopplung
Die internen Leistungsflüsse des Getriebes sind im Folgenden erläutert. Für das Be-
rechnungsbeispiel wird für beide Getriebestufen eine Standübersetzung von i0 = -4
angenommen. Die Betrachtung der Leistungsflüsse ist verlustfrei durchgeführt. Die
Drehmomentverhältnisse an den Wellen eines Planetengetriebes sind bei verlustloser
Betrachtung nur von der Standübersetzung abhängig. Dies ist nach [VDI2157_12] die
Übersetzung zwischen den Zentralwellen bei stillstehendem oder stillstehend gedach-
tem Steg. Die sich ergebenden Drehmomentverhältnisse entsprechen Gleichung (1)
und (2).
1
2
1
20
T
T
z
zi (1)
0TTT s21 (2)
i0 [-] Standübersetzung T1 [Nm] Drehmoment an der Sonne
z1 [-] Zähnezahl an der Sonne T2 [Nm] Drehmoment am Hohlrad
z2 [-] Zähnezahl am Hohlrad Ts [Nm] Drehmoment am Steg
Beispielhaft für die erste Getriebestufe des in Bild 2 dargestellten Getriebes können
die Drehmomente an den Wellen nach (3) und (4) berechnet werden. Dabei wird ein
fiktives Antriebsdrehmoment von 10Nm gewählt.
Nm40)Nm10()4(TiT 102 (3)
Nm50)Nm40Nm10()TT(T 21s (4)
Die inneren Leistungsflüsse werden nach (5), (6) und (7) berechnet.
W200s
rad20Nm10ωTP s11,K (5)
W800s
rad20Nm40ωTP s22,K (6)
2
s
1 1‘
s‘
2‘
Antrieb
drive
Abtrieb
output
Abtrieb
output
Antrieb
drive

ATK 2013
6
W800s
rad20
s
rad100Nm10)ωω(TP s111,W
(7)
PK,1 [W] Kupplunsleistung, übertragen von
der Sonne zum Steg
PK,2 [W] Kupplungsleistung, übertragen
vom Hohrad an den Steg
ωs [rad/s] Winkelgeschwindigkeit des Stegs PW,1 [W] Wälzleistung, übertragen von
der Sonne auf das Hohlrad
ω1 [rad/s] Winkelgeschwindigkeit der Sonne
Bild 3: Leistungsflüsse in seriell verschaltetem Planetenkoppelgetriebe
In Bild 3 sind die inneren Leistungsflüsse und Drehmomente des seriell verschalteten
Planetenkoppelgetriebes veranschaulicht. Die (fiktive) Antriebsleistung an der Son-
nenwelle von 1000W wird im 1. Planetengetriebe in Wälzleistung und Kupplungsleis-
tung aufgeteilt. Während 800W über die Relativbewegung der Zahneingriffe von der
Sonne über die Planeten auf das Hohlrad übertragen werden, fließen 200W direkt von
der Sonne als Kupplungsleistung auf den Steg. Aufgrund der Relativdrehzahl zwischen
Hohlrad und Steg werden die 800W, die über Wälzleistung dem Hohlrad zugeführt
worden sind, von diesem mittels Kupplungsleistung auf den Steg zurückgeführt. Gleich
aufgeteilte Leistungsflüsse ergeben sich in der 2. Stufe, da das Verhältnis von Wälz-
zu Kupplungsleistung allein von der Standübersetzung abhängig ist. Von der insge-
samt übertragenen Leistung (1000W) sind damit in beiden Getriebestufen je 800W
verlustbehaftet. Je kleiner das Verhältnis aus Wälz- und Kupplungsleistung ist, desto
höher ist der Getriebegesamtwirkungsgrad.
3.2 Leistungsverzweigung
Wird die Leistung auf zwei oder mehr Leistungspfade innerhalb einer Getriebestruktur
durch Parallelanordnung unterschiedlicher oder gleichartiger Getriebeglieder aufgeteilt,
so findet nach [VDI2157_12] eine sogenannte Leistungsverzweigung statt.
Ein Koppelgetriebe, bei dem die Leistung innerhalb des Getriebes auf zwei Leistungs-
zweige aufgeteilt wird, ist exemplarisch in Bild 4 mit den resultierenden Leistungsflüs-
sen dargestellt. In der 1. Planetenstufe wird die Antriebsleistung verzweigt. Ein Teil der
Leistung fließt über die 2. Planetenstufe, der Rest direkt zur Sonne der 3. Planetenstu-
Kupplungsleistung
Wälzleistung
s‘1‘s1
2 2‘
10 Nm
100 rad/s
1000 W i0 = -4 i0 = -4
800 W 800 W
200 W
1000 W
800 W 800 W
200 W
40 Nm
-50 Nm 50 Nm
200 Nm
250 Nm
4 rad/s
1000 W
10 Nm -250 Nm
Coupling power
Rolling power
Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
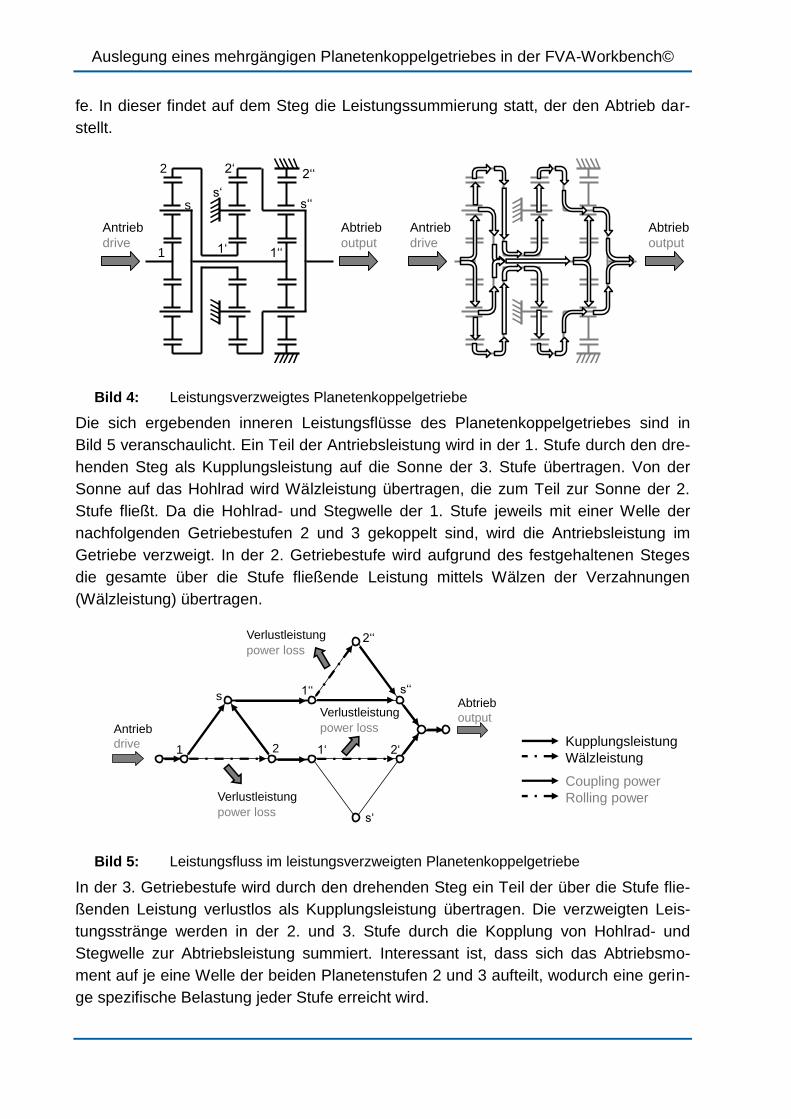
fe. In dieser findet auf dem Steg die Leistungssummierung statt, der den Abtrieb dar-
stellt.
Bild 4: Leistungsverzweigtes Planetenkoppelgetriebe
Die sich ergebenden inneren Leistungsflüsse des Planetenkoppelgetriebes sind in
Bild 5 veranschaulicht. Ein Teil der Antriebsleistung wird in der 1. Stufe durch den dre-
henden Steg als Kupplungsleistung auf die Sonne der 3. Stufe übertragen. Von der
Sonne auf das Hohlrad wird Wälzleistung übertragen, die zum Teil zur Sonne der 2.
Stufe fließt. Da die Hohlrad- und Stegwelle der 1. Stufe jeweils mit einer Welle der
nachfolgenden Getriebestufen 2 und 3 gekoppelt sind, wird die Antriebsleistung im
Getriebe verzweigt. In der 2. Getriebestufe wird aufgrund des festgehaltenen Steges
die gesamte über die Stufe fließende Leistung mittels Wälzen der Verzahnungen
(Wälzleistung) übertragen.
Bild 5: Leistungsfluss im leistungsverzweigten Planetenkoppelgetriebe
In der 3. Getriebestufe wird durch den drehenden Steg ein Teil der über die Stufe flie-
ßenden Leistung verlustlos als Kupplungsleistung übertragen. Die verzweigten Leis-
tungsstränge werden in der 2. und 3. Stufe durch die Kopplung von Hohlrad- und
Stegwelle zur Abtriebsleistung summiert. Interessant ist, dass sich das Abtriebsmo-
ment auf je eine Welle der beiden Planetenstufen 2 und 3 aufteilt, wodurch eine gerin-
ge spezifische Belastung jeder Stufe erreicht wird.
2
s
1
2‘
s‘s‘‘
2‘‘
1‘ 1‘‘
Abtrieb
output
Antrieb
drive
Abtrieb
output
Antrieb
drive
1‘‘
21
ss‘‘
2‘‘Verlustleistung
power loss
1‘ 2‘
s‘
Antrieb
drive
Abtrieb
outputVerlustleistung
power loss
Verlustleistung
power loss
Kupplungsleistung
Wälzleistung
Coupling power
Rolling power

ATK 2013
8
In Bild 6 ist ein Planetenkoppelgetriebe dargestellt, das eine Mehrfachkopplung auf-
weist, d.h. zwei Wellen eines jeden elementaren Umlaufgetriebes sind mit dem jeweils
anderen Planetengetriebe verschaltet. Auch für diese Anordnung ergibt sich eine Leis-
tungsverzweigung. Die Antriebsleistung wird in der 2. Planetenstufe verzweigt, ein Teil
der Leistung fließt direkt zum Abtrieb (Stegwelle), der andere Teil zunächst über die
1. Planetenstufe. Auch hier teilt sich wie im Getriebe nach Bild 4 das Abtriebsmoment
auf je eine Welle der beiden Planetenstufen auf, wodurch wiederum eine geringe spe-
zifische Belastung jeder Stufe erreicht wird.
Bild 6: Leistungsverzweigtes Planetenkoppelgetriebe mit Mehrfachkopplung
Die inneren Leistungsflüsse des oben beschriebenen Planetenkoppelgetriebes sind in
Bild 7 veranschaulicht.
Bild 7: Leistungsflüsse im Planetenkoppelgetriebe mit Mehrfachkopplung
Es ist ersichtlich, dass durch den feststehenden Steg in der 1. Getriebestufe die ge-
samte Leistung durch Wälzen der Verzahnung übertragen wird (Wälzleistung). In der
2. Getriebestufe wird durch die Rotation des Steges ein Teil der Leistung verlustfrei
mittels Kupplungsleistung übertragen.
22‘
1‘1
s
s‘
Abtrieb
output
Antrieb
drive
Abtrieb
output
Antrieb
drive
s
2‘
1‘
1
2
s‘
Verlustleistung
power loss
Kupplungsleistung
Wälzleistung
Coupling power
Rolling power
Abtrieb
output
Antrieb
drive
Verlustleistung
power loss

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
3.3 Getriebesynthese
Die Suche nach Verschaltungen von Planetengetrieben, mit denen eine gewünschte
Funktionalität realisierbar ist, wird als Getriebesynthese bezeichnet. Die Anzahl an
möglichen Getriebeverschaltungen nimmt mit steigender Anzahl an Elementargetrie-
ben (auch unterschiedlicher Bauformen) und Standübersetzungen stark zu. Daher sind
nur relativ einfache Problemstellungen ohne Rechnerunterstützung mit vertretbarem
Aufwand lösbar.
Die ZG-GmbH verfügt über ein Getriebesyntheseprogramm, das Planetenkoppelge-
triebe sowie reduzierte Koppelgetriebe synthetisiert. Der zugrunde liegende Algorith-
mus basiert dabei auf dem Balkenmodell nach [Helfer67]. In diesem Verfahren wird
zunächst ein abstraktes Modell betrachtet, das auf der Äquivalenz zwischen einem
Planetengetriebe und einem Waagebalken beruht. Die Problemstellung (z.B. Überset-
zungsanforderung) wird zunächst anhand dieses abstrakten Modells in ein Teilproblem
zerlegt, das zeitlich relativ schnell auf heutigen Rechnern gelöst werden kann. Im zwei-
ten Schritt werden dem gefundenen Balkenmodell mögliche Planetengetriebe zuge-
ordnet. In Summe können dadurch komplexe Aufgabenstellungen effizient gelöst wer-
den.
Das Getriebesyntheseprogramm verfügt bisher über die folgenden Funktionalitäten:
- Synthese von Koppelgetrieben
- Synthese von reduzierten Koppelgetrieben
- Überprüfung der Baubarkeit anhand der Graphentheorie
- Berechnung von Leistungsflüssen und Wirkungsgrad
- Berechnung der Betriebszustände (Drehmomente, Drehzahlen etc.)
Im Folgenden wird ein zweigängiges Schaltgetriebe vorgeschlagen, das zum Beispiel
als Antrieb einer elektrischen Achse im Pkw eingesetzt werden kann. Das Getriebe
wurde unter Zuhilfenahme des Getriebesyntheseprogramms entwickelt.
3.4 Zweigängiges, leistungsverzweigtes Schaltgetriebe
Elektrische Achsantriebe ermöglichen heute aufgrund der leistungsstarken E-
Maschinen sehr hohe Antriebsmomente. Das vorgeschlagene Planetenkoppelgetriebe
verfügt über eine Leistungsverzweigung und ermöglicht so eine sehr hohe Leistungs-
dichte bezogen auf Bauraum und Gewicht. Zwei Gangstufen ermöglichen auch bei
geringen Fahrzeuggeschwindigkeiten die Ausnutzung der maximalen Antriebsleistung
durch die Bereitstellung einer entsprechend hohen Übersetzung. Die 2. Gangstufe re-
duziert die E-Maschinendrehzahlen und ermöglicht so einerseits hohe Fahrzeugge-
schwindigkeiten sowie andererseits einen Betrieb der E-Maschine im günstigen Kenn-
feldbereich. Der Getriebeaufbau ist in Bild 8 dargestellt.

ATK 2013
10
Bild 8: Aufbau des zweigängigen, leistungsverzweigten Achsantriebes (Halbschnitt)
Der Aufbau des Getriebes entspricht prinzipiell dem in Bild 4. Um die Zweigängigkeit
des Getriebes zu ermöglichen, lassen sich zwei Wellen des Getriebes gegenüber dem
Gehäuse festbremsen. Durch das wahlweise Festsetzen jeweils einer Bremse werden
zwei Gänge realisiert.
Der Leistungsfluss im ersten Gang ist in Bild 9 dargestellt. Durch Schließen der Brem-
se B1 wird der Steg der Stufe 2 gebremst. Es findet eine Leistungsverzweigung in der
1. Stufe auf die Stufen 2 und 3 statt. Im ersten Gang entspricht der Aufbau des Getrie-
bes dem in Bild 4 dargestellten Getriebesystem, und auch die Wirkungsweise ist iden-
tisch.
In Bild 9 sind weiterhin die sich ergebenden Bauteilbelastungen eingetragen, die sich
für ein Abtriebsmoment von 6200Nm (!) ergeben, für das die Verzahnungen des Ge-
triebes dauerfest ausgelegt sind.
Bild 9: Leistungsverzweigter Achsantrieb, Leistungsfluss und Drehmomente im ersten Gang
Es ist ersichtlich, dass keine Welle eines einzelnen (elementaren) Umlaufgetriebes
dieses hohe Drehmoment zu führen braucht. Vielmehr ergibt sich das Abtriebsmoment
durch die Summierung des Hohlradmoments der 2. Stufe mit dem Stegmoment der 3.
Stufe.
Durch Öffnen der Bremse B1 und Schließen der Bremse B2 wird der zweite Gang ge-
St.1 St.2 St.3
i0 = -2 i0 = -2 i0 = -1,8
B1B2
Differential
differential gear
Antriebsmotor
drive engine
500 Nm
-1500 Nm
1000 Nm
1500 Nm
3100 Nm
-4200 Nm
6200 Nm
-1000 Nm
3000 Nm
-2000 Nm
3100 NmSt.1 St.2 St.3
i0 = -2 i0 = -2 i0 = -1,8
Differential
differential gear
B1B2

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
wählt. Der resultierende Leistungsfluss im zweiten Gang ist in Bild 10 gezeigt. Im zwei-
ten Gang gibt es keine Leistungsverzweigung, durch die offene Bremse B2 läuft die
Getriebestufe 2 frei und unbelastet um. Der leistungsführende Getriebeteil entspricht
prinzipiell dem nach Bild 2. Die Drehmomente an den Stufen 1 und 3 bleiben bei kon-
stantem E-Maschinenmoment unverändert.
Bild 10: Leistungsverzweigter Achsantrieb, Leistungsfluss und Drehmomente im zweiten Gang
In Bild 11 ist die Lastaufteilung im ersten Gang dargestellt. Für die gewählten Überset-
zungen wird 1/3 des Achsmoments von Stufe 2 und 2/3 von Stufe 3 erbracht.
Bild 11: Leistungsverzweigter Achsantrieb, Leistungs-/ Drehmomentaufteilung im ersten Gang
Durch die Leistungsverzweigung im ersten Gang ergeben niedrigere Zahnkräfte infol-
ge kleinerer Drehmomente je Zahneingriff. Dies ermöglicht die Wahl kleinerer Moduln,
geringerer Zahnbreiten, kleinerer Durchmesser etc. Daraus ergeben sich folgende Vor-
teile:
- Kleinere Normalmoduln ermöglichen ein günstigeres Anregungsverhalten
(Akustik) durch höhere Überdeckungen.
- Kleine Normalmoduln führen durch kleinere Zahnhöhen zu höheren Verzah-
nungswirkungsgraden.
- Geringere Zahnbreiten führen zu kompakter Bauweise und folglich geringem
Getriebegewicht bzw. hoher Leistungsdichte.
i0 = -2 i0 = -2 i0 = -1,8
500 Nm
-1500 Nm
1000 Nm
-4200 Nm
4200 Nm
2100 Nm2100 NmSt.1 St.2 St.3
Differential
differential gear
1500 Nm
B1B2
B2
St.1 St.2
i0 = -2 i0 = -2
100 %
68 %
32 %
St.3
i0 = -1,8
Differential
differential gear
B1
ATK 2013
12
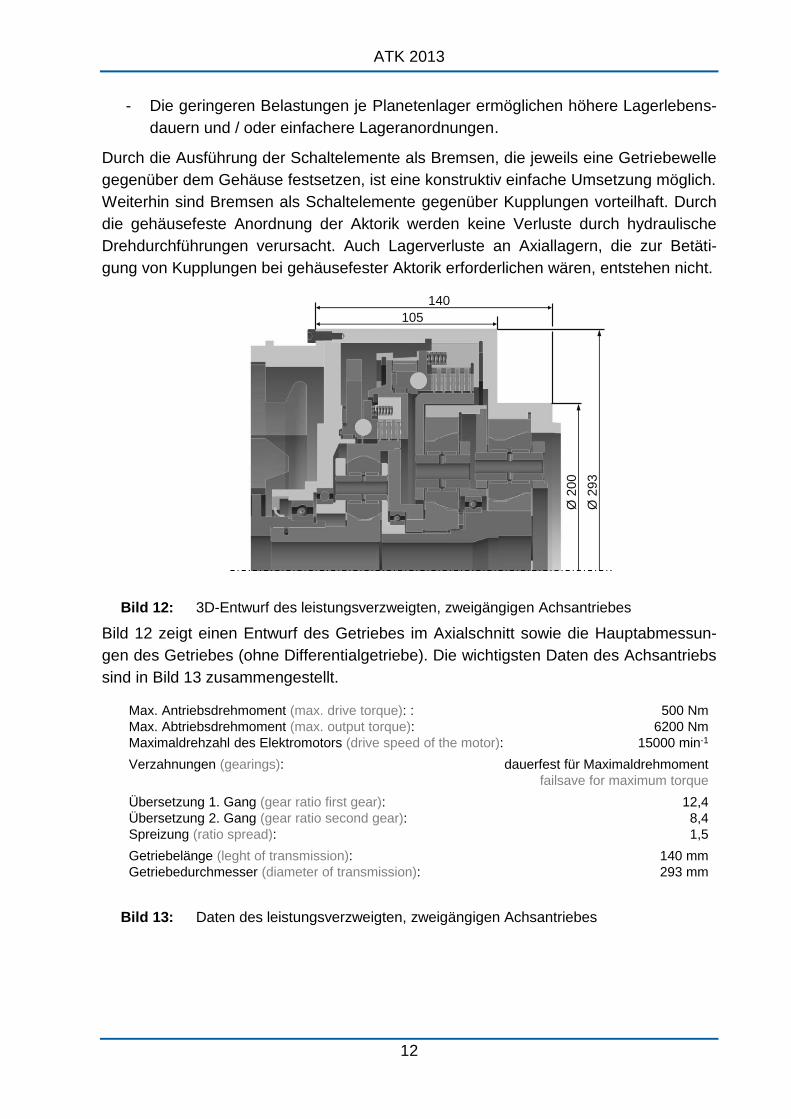
- Die geringeren Belastungen je Planetenlager ermöglichen höhere Lagerlebens-
dauern und / oder einfachere Lageranordnungen.
Durch die Ausführung der Schaltelemente als Bremsen, die jeweils eine Getriebewelle
gegenüber dem Gehäuse festsetzen, ist eine konstruktiv einfache Umsetzung möglich.
Weiterhin sind Bremsen als Schaltelemente gegenüber Kupplungen vorteilhaft. Durch
die gehäusefeste Anordnung der Aktorik werden keine Verluste durch hydraulische
Drehdurchführungen verursacht. Auch Lagerverluste an Axiallagern, die zur Betäti-
gung von Kupplungen bei gehäusefester Aktorik erforderlichen wären, entstehen nicht.
Bild 12: 3D-Entwurf des leistungsverzweigten, zweigängigen Achsantriebes
Bild 12 zeigt einen Entwurf des Getriebes im Axialschnitt sowie die Hauptabmessun-
gen des Getriebes (ohne Differentialgetriebe). Die wichtigsten Daten des Achsantriebs
sind in Bild 13 zusammengestellt.
Bild 13: Daten des leistungsverzweigten, zweigängigen Achsantriebes
Ø 2
00
Ø 2
93
140
105
Max. Antriebsdrehmoment (max. drive torque): :
Max. Abtriebsdrehmoment (max. output torque):
Maximaldrehzahl des Elektromotors (drive speed of the motor):
Verzahnungen (gearings):
Übersetzung 1. Gang (gear ratio first gear):
Übersetzung 2. Gang (gear ratio second gear):
Spreizung (ratio spread):
Getriebelänge (leght of transmission):
Getriebedurchmesser (diameter of transmission):
500 Nm
6200 Nm
15000 min-1
dauerfest für Maximaldrehmoment
failsave for maximum torque
12,4
8,4
1,5
140 mm
293 mm

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
4 Auslegung in der FVA-Workbench©
Die FVA-Workbench© ist eine Softwarelösung, in der die jeweils aktuellen Berech-
nungsprogramme der FVA mittels einer Benutzeroberfläche bedient werden. Mit der
Software werden die Ein- und Ausgabedateien der Berechnungsprogramme verwaltet
und miteinander vernetzt. Die jeweiligen Berechnungsergebnisse der Programme wer-
den dem nachfolgenden Programm übergeben.
In der FVA-Workbench© sind für die Verzahnungsauslegung die FVA-Programme
„STplus“, „KNplus“, „RIKOR“, „Stirak“ und „DZP“ mit deren Basisfunktionen integriert.
Zur Auslegung von Wälzlagern ist in der FVA-Workbench© „Lager2“ enthalten, für die
Berechnung von Gleitlagern steht das Programm ALP3T zur Verfügung [ATZ11].
4.1 Übersicht
Mit der aktuellen Version der FVA-Workbench© lassen sich neben mehrwelligen Stirn-
radgetrieben, wie beispielsweise PKW-Schaltgetriebe, auch Planetengetriebe in Stan-
dardbauweise modellieren, d.h. Planetengetriebe mit dem Aufbau nach Bild 1. Die
Planetengetriebe können über eine oder mehre Wellen miteinander verbunden wer-
den.
Bild 14 zeigt den in der FVA-Workbench© modellierten leistungsverzweigten Achsan-
trieb. Die FVA-Workbench© bietet grundsätzlich die Möglichkeit, Planetenträger in ein-
oder zweiwangiger Ausführung zu modellieren. Die Lagerung der Planeten kann belie-
big ausgeführt werden, im vorliegenden Fall ist die Lagerung über zwei Nadelkränze
pro Planet realisiert. Es sind unter anderem auch angestellte Lagerungen der Planeten
mit Lagern im Planetenträger möglich. Die Schaltelemente können z.B. durch Kupp-
lungselemente modelliert werden. Anhand einer Schaltmatrix können diskrete Gang-
stufen definiert und virtuell zur Berechnung des Getriebes geschaltet werden.
Bild 14: Leistungsverzweigter, zweigängiger Achsantrieb; Darstellung des Gesamtmo-dells zur Berechnung des Getriebes in der FVA-Workbench©
ATK 2013
14
4.2 Funktionalitäten
Im Folgenden werden ausgewählte Funktionalitäten der FVA-Workbench© vorgestellt,
die zur Auslegung des oben beschriebenen Achsantriebs verwendet wurden.
4.2.1 GEAS
GEAS ist ein FVA-Programm zur Berechnung der Leistungsflüsse in beliebigen Ge-
triebesystemen. Mit GEAS werden automatisch die Drehzahlen und Nenndrehmomen-
te an allen modellierten Getriebeelementen bestimmt. Die Verschaltung darf dabei be-
liebig gewählt werden, solange das Getriebesystem statisch und kinematisch bestimmt
ist. Die Ergebnisse des Berechnungsmoduls GEAS werden den in der Berechnungs-
kette nachgelagerten Programmen übergeben.
4.2.2 STplus
Das Programmmodul STplus dient zur Geometrie- und Tragfähigkeitsberechnung von
Evolventen-Stirnradpaarungen und der Paarung Stirnrad-Werkzeug. Die Geometriebe-
rechnungen gehen weit über die Angaben in [DIN3960_87] hinaus. Sie erfassen auch
durch zwei unterschiedliche Werkzeuge bearbeitete Stirnräder sowie Sonderverzah-
nungen. Die Tragfähigkeitsberechnung ist nach den unterschiedlichsten Verfahren
möglich. Erfasst sind die zurzeit gültigen nationalen und internationalen Normen, ihre
vorangegangenen Vorschriften und ältere Vorschriften [STplus10]. Auch die Berech-
nung von Planetengetrieben in Standardbauweise ist in STplus integriert. Sämtliche
Funktionen werden über die Benutzeroberfläche der FVA-Workbench© angesteuert.
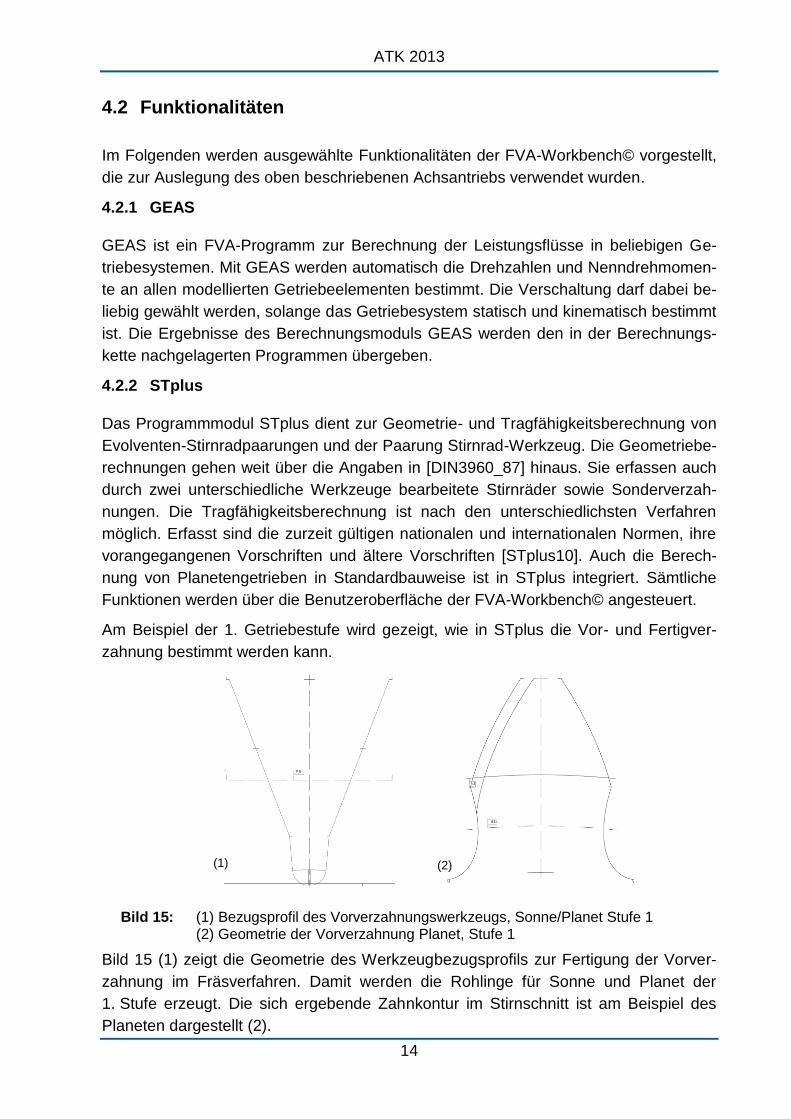
Am Beispiel der 1. Getriebestufe wird gezeigt, wie in STplus die Vor- und Fertigver-
zahnung bestimmt werden kann.
Bild 15: (1) Bezugsprofil des Vorverzahnungswerkzeugs, Sonne/Planet Stufe 1 (2) Geometrie der Vorverzahnung Planet, Stufe 1
Bild 15 (1) zeigt die Geometrie des Werkzeugbezugsprofils zur Fertigung der Vorver-
zahnung im Fräsverfahren. Damit werden die Rohlinge für Sonne und Planet der
1. Stufe erzeugt. Die sich ergebende Zahnkontur im Stirnschnitt ist am Beispiel des
Planeten dargestellt (2).
(1) (2)
Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
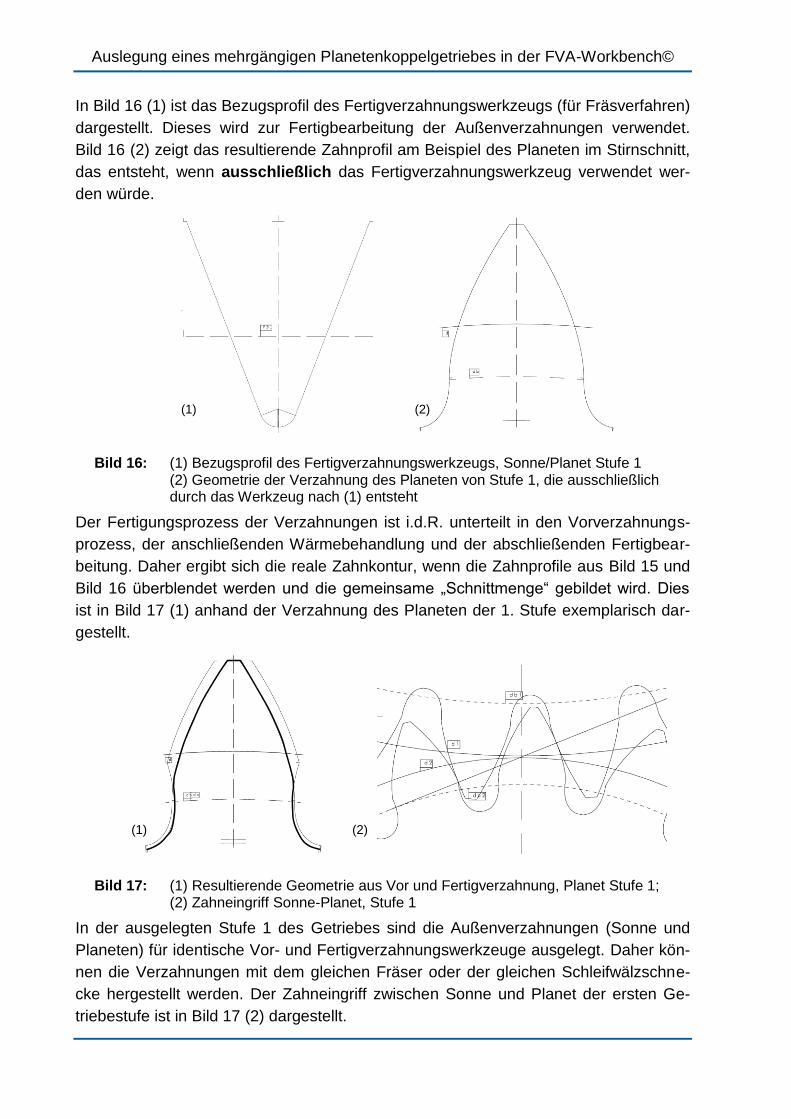
In Bild 16 (1) ist das Bezugsprofil des Fertigverzahnungswerkzeugs (für Fräsverfahren)
dargestellt. Dieses wird zur Fertigbearbeitung der Außenverzahnungen verwendet.
Bild 16 (2) zeigt das resultierende Zahnprofil am Beispiel des Planeten im Stirnschnitt,
das entsteht, wenn ausschließlich das Fertigverzahnungswerkzeug verwendet wer-
den würde.
Bild 16: (1) Bezugsprofil des Fertigverzahnungswerkzeugs, Sonne/Planet Stufe 1 (2) Geometrie der Verzahnung des Planeten von Stufe 1, die ausschließlich durch das Werkzeug nach (1) entsteht
Der Fertigungsprozess der Verzahnungen ist i.d.R. unterteilt in den Vorverzahnungs-
prozess, der anschließenden Wärmebehandlung und der abschließenden Fertigbear-
beitung. Daher ergibt sich die reale Zahnkontur, wenn die Zahnprofile aus Bild 15 und
Bild 16 überblendet werden und die gemeinsame „Schnittmenge“ gebildet wird. Dies
ist in Bild 17 (1) anhand der Verzahnung des Planeten der 1. Stufe exemplarisch dar-
gestellt.
Bild 17: (1) Resultierende Geometrie aus Vor und Fertigverzahnung, Planet Stufe 1; (2) Zahneingriff Sonne-Planet, Stufe 1
In der ausgelegten Stufe 1 des Getriebes sind die Außenverzahnungen (Sonne und
Planeten) für identische Vor- und Fertigverzahnungswerkzeuge ausgelegt. Daher kön-
nen die Verzahnungen mit dem gleichen Fräser oder der gleichen Schleifwälzschne-
cke hergestellt werden. Der Zahneingriff zwischen Sonne und Planet der ersten Ge-
triebestufe ist in Bild 17 (2) dargestellt.
(1) (2)
(1) (2)

ATK 2013
16
4.2.3 RIKOR
Das FVA-Berechnungsprogramm RIKOR [RIKOR_09] ermittelt anhand einer örtlichen
Betrachtungsweise die Beanspruchungen von Zahnflanke- und fuß. Dabei werden zur
Bestimmung der Lastverteilung im Zahneingriff die durch das eingeleitete Drehmoment
verursachten Verformungen und Verlagerungen von Wellen, Lagern und Verzahnun-
gen berücksichtigt [ATZ11].
Verzahnungskorrekturen
Im Zahneingriff von Stirnrädern können die Verdrillung und Durchbiegung der Radkör-
per, die Verformung der Zähne sowie die Verlagerung der Wellen infolge von Wel-
lenelastizitäten, Lagerspielen und Lagerverformungen ein ungleichmäßiges Tragver-
halten bewirken. Durch angepasste Flankenformmodifikationen (Verzahnungskorrektu-
ren) kann der ungleichen Lastverteilung entgegengewirkt werden [RIKOR_09].
Das Ziel von Verzahnungskorrekturen ist eine möglichst gleichmäßige Pressungsver-
teilung über den gesamten Zahneingriff, um die Verzahnung im Randbereich (Stirn-
und Kopfkante) zu entlasten [ATZ11].
Bild 18 (1) zeigt die Pressungsverteilung des Zahnkontakts Sonne-Planet der nicht
korrigierten Verzahnungen der ersten Getriebestufe. Die Verlagerung im Zahneingriff,
resultierend aus Lagerverformung, Wellenverformung und Verzahnungskörperverfor-
mung, ist darin berücksichtigt. Die Pressung ist nicht gleichmäßig über den gesamten
Zahneingriff verteilt, sondern weist teilweise hohe Pressungsspitzen auf, wodurch das
Tragfähigkeitspotential der Verzahnung nicht voll ausgenutzt werden kann.
Bild 18: (1) Pressungsverteilung der unkorrigierten Verzahnung für das max. Dreh-moment, Kontakt Sonne-Planet, Stufe 1; (2) Pressungsverteilung der korrigierten Verzahnung, Kontakt Sonne-Planet, Stufe 1
Im Folgenden wird exemplarisch die Auswirkung einer Kombination aus verschiedenen
und gebräuchlichen Flankenkorrekturen auf die Pressungsverteilung aufgezeigt. Die
Art der Korrekturen sowie deren Korrekturwert sind lediglich überschlägig gewählt um
das Getriebekonzept hinsichtlich dessen Drehmomentkapazität abschätzend beurtei-
Pre
ssung [N
/mm
²]
pre
ssure
pH,max ≈ 1750 N/mm² pH,max ≈ 1400 N/mm²
(1) (2)
Pre
ssu
ng
[N
/mm
²]
pre
ssu
re

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
len zu können. Eine detailliertere Getriebekonstruktion ermöglicht und erfordert eine
genauere Korrekturauslegung, vor allem dann, wenn eine gute Getriebeakustik hoch
priorisiert wird.
Die Topographie einer möglichen Verzahnungskorrektur ist in Bild 19 dargestellt. Die
Kombination aus Höhen- und Breitenballigkeit sowie Kopf- und Fußrücknahme am
Planet ermöglicht ein stabileres Tragbild auch bei größeren Verlagerungen und beugt
Pressungsspitzen vor.
Bild 19: Topographie der Verzahnungskorrektur am Planet, Stufe 1
Die resultierende Pressungsverteilung der korrigierten Verzahnung des Eingriffs Son-
ne-Planet der Getriebestufe 1 ist in Bild 18 (2) dargestellt. Die Pressungsverteilung ist
gleichmäßiger als bei der unkorrigierten Verzahnung und die maximale Pressung wur-
de um ca. 350 N/mm² reduziert.
Lagerberechnung
Die hochbelasteten Planetenlager können mit RIKOR [RIKOR_09] unter Berücksichti-
gung der lokalen Lastverteilung am Wälzkörper nach [DINISO281_03] Beiblatt 4, de-
tailliert betrachtet werden.
In Bild 20 ist die erste Getriebestufe des Achsantriebes mit jeweils unterschiedlichen
Verzahnungsschrägungswinkeln dargestellt. Dies führt bei gleichem Normalmodul und
gleicher Zahnbreite zu unterschiedlich großen Sprungüberdeckungen. Je höher die
Sprungüberdeckung, desto günstiger ist i.d.R. das Anregungsverhalten und die Akustik
der Verzahnung. Durch unterschiedliche Schrägungswinkel ergeben sich jedoch auch
andere Axialkräfte an den Verzahnungen, die zu einem unterschiedlich großem Kipp-
moment am Planeten führen. Dieses ist durch die Lagerung des Planeten abzustützen.
Für die Verzahnung mit größerem Schrägungswinkel resultieren höhere Axialkräfte
und damit größere Kippmomente, die zu einer höhere Wälzkörperbelastung führen.
Für die Lagerung der Planeten sind zwei Nadelkränze pro Planet vorgesehen. In den
folgenden Bildern sind jeweils nur die Ergebnisse des höher belasteten Lagers darge-
stellt.
Hertzsche PressungTo
po
gra
ph
ie [
µm
]
top
og
rap
hy
Fu
ßrü
ckn
ah
me
roo
tre
lief
Breitenballigkeit
helix crowningHöhenballigkeit
profile crowning
Kopfr
ücknahm
e
tip
relie
f

ATK 2013
18
Bild 20: (1) Verzahnung Stufe 1, εβ = 2,1; β = 27,5°, (2) Verzahnung Stufe 1, εβ = 1,05; β = 13,3°
In Bild 21 sind die Pressungsverteilungen am Innenring zusammengestellt, die sich für
die jeweilige Variante ergeben. Wie dem Bild entnommen werden kann, führt ein grö-
ßerer Schrägungswinkel zu deutlich höheren Pressungen an den Wälzkörpern.
Bild 21: Grafikausgabe RIKOR, Pressungsverteilung am Lagerinnenring, (1): für β = 27,5°; (2): für β = 13,3°
Bild 22: Lagerpressung (Planetenlager) für unterschiedliche Schrägungswinkel, maximale Pressung am Lagerinnenring, Getriebestufe 1
εβ = 2,1; β = 27,5° εβ = 1,05; β = 13,3°
(2)(1)
(1) εβ = 2,1; β = 27,5°
pH, max = 3419 N/mm²
(2) εβ = 1,05; β = 13,3°
pH, max = 2519 N/mm²
4000
3500
3000
2500
2000
1500
1000
500
00-1-2-3 1 2 3
pH
[N/m
m²]
Scheiben in u-Richtung [mm]
discs in u-direction
Rolle mit der maximalen Hertzschen Pressung (rolling element with the max. hertzian pressure)
Pressungsverteilung längs der Rolle, Innenring (pressure distribution along the rolling element, inner ring)
εβ = 2,1; β = 27,5° pH,max = 3419 N/mm²
nom. Lebensdauer (nominal lifetime) LH10r = 7,0 h
mod. Lebensdauer (adusted rating life) LnmrH_EP = 2,0 h
TMotor, max (Tdrive_engine) = 500 Nm
nMotor (ndrive_engine) = 4.000 min-1
2x K15x19x10 pro Planet, Stufe 1
2x K15x19x10 per planet, stage 1
εβ = 1,05; β = 13,3° pH,max = 2519 N/mm²
nom. Lebensdauer (nominal lifetime) LH10r = 50,3 h
mod. Lebensdauer (adusted rating life) LnmrH_EP =19,9 h

Auslegung eines mehrgängigen Planetenkoppelgetriebes in der FVA-Workbench©
Für die Position mit der höchsten Belastung des jeweiligen Wälzkörpers sind in Bild 22
die Pressungsverläufe entlang der Wälzkörperachse aufgetragen.
Da die Planetenlager eines elektrischen Achsantriebs meist kritisch hinsichtlich deren
Lebensdauer belastet werden, ist eine iterative Auslegung der Verzahnungsgeometrie
unter Beachtung der sich ändernden Lagerbeanspruchungen erforderlich.
Für das vorgeschlagene Getriebekonzept konnte insgesamt jedoch gezeigt werden,
dass die Lager dem hohen Abtriebsdrehmoment standhalten können.
5 Zusammenfassung
Der vorgeschlagene koaxiale Achsantrieb besteht aus drei elementaren Planetenge-
trieben in Standardbauweise, d.h. jeweils bestehend aus Sonne, Planeten und Hohl-
rad. Bei geschaltetem 1. Gang wird die Antriebsleistung der E-Maschine in der ersten
Planetenstufe aufgeteilt und auf die beiden nachfolgenden Planetenstufen verzweigt.
Mit diesen Getrieben hat der Getriebeabtrieb zum Differential je eine Welle gemein-
sam, auf der die Leistung wieder summiert wird. Die Erzeugung des Abtriebsmoments,
jeweils anteilig in zwei Planetengetrieben, ermöglicht eine effiziente Getriebeausnut-
zung, da kein Planetengetriebe mit einem Drehmoment in der Größe des Achsmo-
ments beansprucht ist. Trotzdem tragen alle drei verbauten Planetengetriebe dazu bei,
die gewünschten Übersetzungen zu erzeugen. Im zweiten Gang findet im Getriebe
keine Leistungsteilung statt, allerdings treten aufgrund der geringeren Übersetzung
keine höheren Beanspruchungen als im ersten Gang auf.
Zum Schalten der Gänge wird je eine Welle gegen das Gehäuse gebremst. Der Vorteil
von Lamellenbremsen gegenüber Lamellenkupplungen ist der geringere konstruktive
Aufwand: Bei hydraulisch betätigen Kupplungen müssen verlustreiche Drehdurchfüh-
rungen vorgesehen werden, bei elektromechanischen Kupplungen mit ruhender Akto-
rik ist die Betätigungskraft über zwei Axiallager mit Relativdrehzahl zu führen. Im Falle
von Bremsen ist eine gehäusefeste Integration der Aktorik problemlos möglich. Die
damit einhergehende Vermeidung von Verlusten ist gerade für elektrische Antriebe
relevant.
Innerhalb einer Machbarkeitsstudie wurde das Getriebe als 3D-CAD-Konstruktion um-
gesetzt. Für eine gesicherte Dimensionierung der Verzahnungen und Lager wurde das
Getriebe in der aktuellen Version der FVA-Workbench© modelliert und nachgerechnet.
So war mit dem in der FVA-Workbench© enthaltenen Stirnradberechnungsprogramm
STplus nicht nur die geometrische Auslegung der Vor- und Fertigverzahnungen mög-
lich, auch der Festigkeitsnachweis nach gängigen Normen wurde erbracht. Verzah-
nungskorrekturen zur Optimierung der Tragfähigkeit wurden mit dem Rechenkern
RIKOR bestimmt. Insbesondere die Lagerberechnung unter Berücksichtigung der loka-
len Lastverteilungen am Wälzkörper nach [DINISO281_03] ermöglichte einen aussa-

ATK 2013
20
gekräftigen Lebensdauernachweis der hochbelasteten Planetenlager. Anhand konkre-
ter Beispiele wurden die jeweiligen Berechnungsschritte dargestellt.
Insgesamt konnte das vermutete Potential des zweigängigen koaxialen Achsantriebs
bestätigt werden. Die mit der Leistungsverzweigung einhergehende hohe Leistungs-
dichte wurde nachgewiesen. Vor allem die häufig sehr kritisch belasteten Wälzlager
profitieren in dieser Getriebeanordnung von den geringeren spezifischen Belastungen
der einzelnen Getriebestufen.
6 Literaturverzeichnis
[ATZ11] Höhn, B.-R.; Wirth, Ch.; Otto, M.; Heider, M: Integrative Be-
rechnung verkürzt geräuschoptimale Auslegung von Getrie-
ben. Automobiltechnische Zeitschrift ATZ, Springer-Vieweg,
Wiesbaden, 08/2011
[DIN3960_87] Deutsches Institut für Normung e. V.: DIN 3960; Begriffe und
Bestimmungsgrößen für Stirnräder (Zylinderräder) und Stirn-
radpaare (Zylinderradpaare) mit Evolventenverzahnung,
Deutsches Institut für Normung e. V., 1987
[DINISO281_03] DIN ISO 281 Beiblatt 4; Wälzlager - Dynamische Tragzahlen
und nominelle Lebensdauer - Verfahren zur Berechnung der
modifizierten Referenz-Lebensdauer für allgemein belastete
Wälzlager, 2003
[Helfer67] Helfer, F.: Eine Analogie zur Untersuchung von Planetenge-
trieben, Automobiltechnische Zeitschrift ATZ 69, Nr. 5, 1967
[MÜLLER98] Müller, H. W.: Die Umlaufgetriebe; Auslegung und vielseitige
Anwendungen. Springer-Verlag Berlin Heidelberg New York,
1998
[RIKOR09] Forschungsvereinigung Antriebstechnik e.V. (FVA) (Hrsg.):
Ritzelkorrektur (RIKOR), Version I, Programmdokumentation,
Forschungsvereinigung Antriebstechnik e.V. (FVA), Frank-
furt/Main, 2009
[STplus10] Steigröver, K.; Fröh, A.: FVA-Stirnradprogramm STplus, Be-
nutzeranleitung, FVA-Forschungsheft Nr. 477, Forschungs-
vereinigung Antriebstechnik e.V. (FVA), Frankfurt/Main, 2010
[VDI2157_12] Verein Deutscher Ingenieure: VDI 2157; Planetengetriebe:
Begriffe, Symbole, Berechnungsgrundlagen. Beuth Verlag
GmbH, Berlin, 2012