aucun titre de diapositive - astrosurf · head lines 1. astronomical needs and timing accuracy...
TRANSCRIPT
Timekeeping Trade-off
Thierry Midavaine, Bernard Christophe, Olivier Dechambre, Jean-Charles Lestel,
Delphine Nguyen, Jean-Marie Vugnon
ESOP XXIII Aug 27-29, 2004

Club Eclipse Paris
Founded in 1978 16 members from Paris area Activities around experimental projects 4 meeting a year at the Paris Observatory Permanent link thanks to our mailing list Missions in Observatories on 60cm class telescopes Transient events
Phemu Occultation by asteroids and satellites
Sensors and acquisition process

Club Eclipse Members

Head Lines
1. Astronomical needs and timing accuracy requirements,
2. Review of the time keeping solutions and their respective accuracies
3. Signal imaging receivers: web cam, video cameras, CCD cameras, image intensifiers. receiver features
4. Recording the image and linking the timing accuratelyRealisation of an artificial variable starThe effective accuracyResults on phemus and star occultations by asteroids.
5. The future

1. Astronomical needs
Phemu and PhesatOccultation timing (moons or astéroids)
Size of asteroidsDouble star detectionAngular size of occulted stars
Shooting starsAstrometry on artificial satellitesPulsar timingPhoton counting

The problem to solve
UTC
report
occultation
prediction
J. Manek

Timing accuracy requirements
Absolute accuracy Earth velocity 30km/s GPS location accuracy ~10m – 25m
=> 0.3ms – 1ms Rise time of the shutter or pixel transfert delay
Relative accuracy Asteroid vs Earth relative speed 15km/s at 2AU 10 mas/sec Acquisition rate from 100ms down to 1ms Exposure time Sensor bandwidth Relative localisation between telescopes

Timing ref
TAI: International Atomic Time The BIPM defines the Atomic Time from a period of the
Cesium133 transition. UT
UT0 (diurnal motion of stars) UT1 (computed from UT0, correct the longitude motion)
UTC: Coordinated Universal Time UTC=TAI+n sec ; UT1-UTC<0.9s
Dynamical Time (replace ephemeris time) Terrestrial time TDT=TAI+32.184s Barycentric Dynamical Time refer to the Solar system
barycentre

2. Time keeping alternates
2.1 The Sky The earth sideral rotation Astronomical events (Jupiter satellite events, Moon position, satellite eclipse… )
2.2 Atomic clock through a communication link 2.21 Speaking Clock through wired phone link 2.22 NTP Tardis, Dimension 4 and SNTP through Internet 2.23 LW emitters:
DCF 77 LW France Inter Allouis emitter (French railway network) MSF in UK …
2.24 GPS
2.3 Quartz clock 2.4 Internal clock from PC

2.1 The sky and Earth rotation
The day length The sideral Earth period: Accy 10-9
Astrometry on stars with an accy of 0.1 arc sec allows a timing accuracy of 0.1/15 s= 7ms
Star drift allows relative timing The turbulence give a timing noise. A seeing of 3 arcsec give a 0.2s
timing accuracy Requires a good knowledge of the observatory coordinates, absolute
line of sight (geo ref.) and accurate Earth ephemerid model The year length
Since 1968 the tropic year length is no longer the timing ref.
Daphne 1999

2.21 Atomic Speaking clock
Advantages Very simple Acoustic interface
Drawbacks Through the wired phone network, nomade incompatible Wireless GSM phone network with lower accuracy limited communication duration (3mn) Could be buzy
Accuracy 10ms accuracy ? (Through phone wired network)

2.22 NTP and SNTP Simple Network Time Protocol
Advantages Free, thanks to internet Simple software Right Time, Tardis or Dimension 4
Drawbacks Limited to PC clocking… Require access to wired network and Internet No direct output Accuracy rely on PC, OS and Soft load
Accuracy PC Local Area Network give a 20ms random error Internet network, node, protocol… increase the error

NTP/NMEA-GPS Comparison(Guillaume Dubos 2003)
Compaq presario celeron 950MHz 256Mo Xppro, 56kb/s Internet access to NTP, Automachon
GPS Garmin Etrex Legend on NMEA input through serial port NMEATime

2.23 LW Emitters
MSF 60kHz Rugby UK
OMS 50kHz Praha Cz
(switch off in the 90’s)
Moscow Ru

LW Emitter Range
Time lag due to time of flight (1ms for 300km)Signal range and SNR
1/R2 for R<300km1/R4 for R>300km
Ionospheric layer complex contributionSignal increase thanks to ionospheric reflexionTime drift and jitter due to multipath lengthSignal decrease due to layer absorption

DCF77 Emitter
Emitter Location in Mainflingen closed to Francfurt N50°01’ E09°00’ Deutsche Telekom AG Carrier frequency 77,5kHz, 30kW Carrier Amplitude Modulation of pulse per second The front edge of the pulse give the second Accuracy 0,3µs The pulse length give the code: 80ms=0 160ms=1 Within each minute you get :
The year, month, day, day of the week, hour, the following minute, The 59th second is missing Legal time of Germany Two bits refer to winter or summer time

DCF77 receivers
NEOL NEOL S.A. Paul REYSER Mouse clock distributed by Radio Spare or Selectronic ref. "Rotronic", code article 220-3942 79 € HT New receiver in developpement in Neol realised by
Jean-Charles Lestel. It integrates an optimal filtering to improve the pulse SNR. Prototype presented at the Francfurt exhibit in november 2004.

DCF77
Advantages PPS signal, embedding one minute code (easy to read), Low cost Indoor compatible Interface outputs: TTL, Serial or parallel port on PC, or USB For PC : very simple software to up-date the PC clock
Drawbacks Coverage limited to Europe (however A. Maury show reception
capability in Chile !) Sensitive to EM field (EM noise from PC !) Time lag according to the wave time of flight from Francfurt Software drive the PC clock 230ms ahead !
Accuracy DCF from 20 to 50ms late vs GPS
(according to the receiver and conditions) 3ms jitter 1σ (or +/- 10ms)

GPS/DCF77 Comparison

Demodulated DCF signal

Allouis Emitter
France Inter TDF Emitter located at Allouis close to Bourges. Covered by TDF agreement.
162kHz Power 1MW and 2MW 1/2h every day 47°10’N 2°12’E phase modulation delivers time code

Allouis Receiver
Bodet manufacture IRO17E a chip « France Inter » receiver which deliver the hour code including mn, h, day, and PPS. Drive the change between winter and summer time.
Deliver PPS Accuracy 1ms Advantage and Drawbacks similar to
DCF. May give a better accy thanks to a better
SNR

Bodet
DCF and Allouis receiver

GPS
EmittersUS Naval Obs atomic clock24 satellites on 6 orbits at 18000kmUS DoD may decide to scramble the signal to
decrease receiver accuracyWide band signal

GPS receivers
GPS master clock Deliver pulses at 1Hz, 10Hz, 100Hz 1kHz Accuracy better than 100ns ?
OEM receivers It requires at least 4 satellites signal to calculate loc and time Deliver NMEA code delivering date, time and position Deliver PPS: 20ms pgm length 5V pulse each second Accuracy 2µs

GPS
Advantages World wide Nomad compatible Low cost (OEM: Laipac 90€) PPS analog TTL output Give the Earth coordinates
Drawbacks Requires outdoor antenna with a wide field of view Dependancy on the US DOD
Accuracy PPS better than 2µs, Better than 100ns ?

2.3 Quartz clock
AdvantageGood relative accuracy 10-6 or better
DrawbackRequires an absolute clock
AccuracyLinked to a PPS give the µs

2.4 PC Internal clock
Low quality : 10-5
Rely on PC soft load.Be surprised to see the clock stopping while
down loading an image, then the clock jump forward wrongly !
However Winscan shows a regular clocking of ST7 camera in driftscan mode at 50ms line rate

3. Signal imaging receivers:
3.1 CCD and CMOS time lines
3.2 webcam, 3.3 video cameras, 3.4 image intensifiers 3.5 digital CCD cameras,
receiver features

3.1 The various CCD time lines 1/2
Full frame CCD with a shutter1. Exposure time controlled by the shutter2. Then read out period before the following exposure
CCD time lines 2/2
Frame transfert CCD1. Exposure time2. Then frame transfert to the memory area (electronic shutter)3. Then read out period while exposure of the following frame
Interline CCD and CMOS focal plane array Snap shot mode
1. Exposure time2. Then pixel transfer to adjacent pixel memory3. Then read out period while exposing the following frame
Progressive scan mode The successive lines are exposed then read out to mimic the
Vidicon and CRT scanning. The frame is scanned line by line. Therefore the exposure period drift through the field of view.

3.2 Webcam
Could be CCD or CMOS detectors in progressive scan mode
The rate is driven by the PCFrom few Hz to 30HzThe rate is noisy and inaccurate

écartTC-DC77
0.00066
0.000665
0.00067
0.000675
0.00068
0.000685
0.00069
0.000695
0.0007
numéro d'image
ecar
t en
frac
tion
de jo
ur
écartTC-DC77
Drift between the 15Hz frame rate of a Web cam and 1Pulse /sec from DCF77

Effective min rate applicationécartTC-DC77
-0.000008
-0.000006
-0.000004
-0.000002
0
0.000002
0.000004
0.000006
numéro d'image
ecar
t en
frac
tion
de jo
ur
écartTC-DC77

3.3 Video Cameras
CCIR 2:1 Interlace: odd and even line ½ frame at
50Hz or 25Hz for a complete frame.

Watec 902H and 902HS
Sony micro-lenses and interline CCD (429ALL EX View super HAD)
Effective sensitivity 2mlux Instead of claimed
0.15mluxWatec 902HS may switch to manual exposure.Power consumption 2WCCIR, 2:1 interlace

E2V TechnologiesL3CCD
Avalanche amplifier CCD
Sensitivity: 0.1 mlux to 0.01mlux
Occultation par Li du 12/04/03 Club Eclipse T60
-50
0
50
100
150
200
010
020
030
040
050
060
070
080
090
010
0011
0012
0013
0014
0015
0016
0017
0018
0019
0020
0021
0022
0023
0024
0025
0026
0027
0028
0029
0030
0031
0032
0033
0034
0035
0036
0037
0038
0039
0040
0041
0042
0043
0044
0045
0046
0047
0048
0049
0050
00
temps
ampl
itude Occultation par Li
Série2

Video rate, Sound and Image comparaison
0
5
10
15
20
251 9 17 25 33 41 49 57 65 73 81 89 97 105
113
121
Time in second
Su
b s
ec f
ram
e n
um
ber
Soundimage

3.4 Image Intensifier
Sensitivity 0.03mlux (3rd gen or 2nd hypergen) Limited by sky backgroundPhosphore decay time less than 1ms (100ns)Power consumption 0.2WAccess to photon countingTo be fitted to electronic imaging sensor.

3.5 CCD Digital Cameras
Window mode (Unsuccessfull at high rate !) Drift scan mode 2ms line rate for 100 pixels line
achieved with Ethernaude (Ethernet port) Drift scan mode on ST7,8,9 parallel port WinXP,
Winscan soft 50ms line rate 768 pixels, 10ms line rate 100pixels
Precision timing require knowing star position in the FOV to correct time lag due to the number of line + blind line on the CCD between the bottom and star.

Test on artificial star in drift scan mode driven by the PC

4. Recording the image and linking the timing accurately
4.1 Optic In using a collimated artificial star driven by the DCF77 in a sub pupill of the acquisition telescope (it could come from a telrad dot)
4.2 AcousticWith a webcamWith a video camera
4.3 Digital

4.2 Acoustic link on a webcam

Acoustic and DCF set

The time on the sound track
❚ The TTL output from DCF drive an oscillator at 800Hz❚ Web cam
❙ The signal is amplified and feed a loudspeaker❙ The acoustic signal is heared by the web cam microphone.❙ The sound track and the image are recorded with Prism5 or the
webcam software.❚ Video
❙ The output is directly recorded on one sound track❚ With the artificial star we checked the good sound to
image synchronisation

Synchronisation test video/sound track
Antenne
Web-cam PC
Microphone
HP
1kHz
Artificial star LED

Image and timing processing
❚ Timing processing with Adobe Premiere LE❙ Allows the reading of the frame number
synchronised to the PPS❚ Photometry processing with IRIS 3.8 using
aperture photometry algorythm❚ Final data process linking timing with
photometry with Excel

Adobe premiere sound track process and frame registering

Data processN° de l'image#VALEUR! frac jour image Heureminutessecondesdixième de secondefraction de jour fraction de jour écartTC-DC77 Flux H UTC Flux filtré 3724.719 delta M
1 7.71605E-07 0.906904306 21 45 56 5.3 0.906904306 0.906209861 0.000694444 3832 21.74903668 3724.7 02 1.54321E-06 0.906905078 0 0.906210633 0.000694444 3556 21.74905519 3724.7 03 2.31481E-06 0.906905849 0 0.906211405 0.000694444 3644 21.74907371 3724.7 04 3.08642E-06 0.906906621 0 0.906212176 0.000694444 3644 21.74909223 3681.5 -0.012671775 3.85802E-06 0.906907392 0 0.906212948 0.000694444 3708 21.74911075 3691.5 -0.00972666 4.62963E-06 0.906908164 0 0.90621372 0.000694444 3708 21.74912927 3697.8 -0.007889927 5.40123E-06 0.906908936 0 0.906214491 0.000694444 3912 21.74914779 3702.3 -0.006569438 6.17284E-06 0.906909707 21 45 57 0 0.906909722 0.906215278 0.000694429 3508 21.74916667 3692.8 -0.009359029 6.94444E-06 0.906910479 0 0.906216049 0.000694429 3524 21.74918519 3711 -0.004006410 7.71605E-06 0.90691125 0 0.906216821 0.000694429 3832 21.7492037 3764 0.0113902511 8.48765E-06 0.906912022 0 0.906217593 0.000694429 3956 21.74922222 3800.5 0.0218680612 9.25926E-06 0.906912794 0 0.906218364 0.000694429 3816 21.74924074 3806.8 0.0236521113 1.00309E-05 0.906913565 0 0.906219136 0.000694429 3896 21.74925926 3787.8 0.0182194814 1.08025E-05 0.906914337 0 0.906219907 0.000694429 3692 21.74927778 3747.5 0.0066203215 1.15741E-05 0.906915108 0 0.906220679 0.000694429 3516 21.7492963 3733.3 0.002483916 1.23457E-05 0.90691588 0 0.906221451 0.000694429 3720 21.74931481 3758.5 0.009802617 1.31173E-05 0.906916652 0 0.906222222 0.000694429 3928 21.74933333 3792 0.0194370418 1.38889E-05 0.906917423 0 0.906222994 0.000694429 3968 21.74935185 3824.5 0.0287028819 1.46605E-05 0.906918195 0 0.906223765 0.000694429 3708 21.74937037 3811.3 0.0249348120 1.54321E-05 0.906918966 0 0.906224537 0.000694429 3756 21.74938889 3775.8 0.0147742921 1.62037E-05 0.906919738 0 0.906225309 0.000694429 3944 21.74940741 3743.3 0.005388322 1.69753E-05 0.90692051 0 0.90622608 0.000694429 3512 21.74942593 3691 -0.0098736723 1.77469E-05 0.906921281 21 45 58 0 0.906921296 0.906226852 0.000694429 3544 21.74944444 3677.8 -0.0137782824 1.85185E-05 0.906922053 0 0.906227623 0.000694429 3840 21.74946296 3684.8 -0.0117137225 1.92901E-05 0.906922824 0 0.906228395 0.000694429 3644 21.74948148 3673.5 -0.0150336826 2.00617E-05 0.906923596 0 0.906229167 0.000694429 3680 21.7495 3678.5 -0.01355688

1 Occ 2 le 13/03/03 Club Eclipse
-0,5
0
21,74 21,76 21,78 21,8 21,82 21,84 21,86 21,88 21,9 21,92
H UTC
delta
Mag
Phemu webcam and sound recording

Video frame and DCF PPSAdobe premiere process

566 Stereoskopia TYC 4970-01009-1
0
5000
10000
15000
20000
25000
30000
35000
400001 36 71 106
141
176
211
246
281
316
351
386
421
456
491
526
561
596
631
666
701
736
771
806
841
876
911
946
981
1016
1051
Numéro Images
Flux
TYC 4970-01009-1
Moy. mobile sur 10 pér. (TYC 4970-01009-1)
25cm telescope, Watec 902HS, 20ms exposure
40ms video rate, mini DV camcorder
PPS from DCF77 clocking (47ms late vs GPS +/-10ms)
Star Mv=10.9 SNR=1.2

4.3 Digital stamping
Video camera with Black box time inserter

Video frequency vs GPS black box inserter
test black box dérive video
y = 0,0287x + 25,142
24
24,5
25
25,5
26
26,5
27
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55
secondes du PPS
mill
isec
onde
incr
usté
e
Série1
Linéaire (Série1)
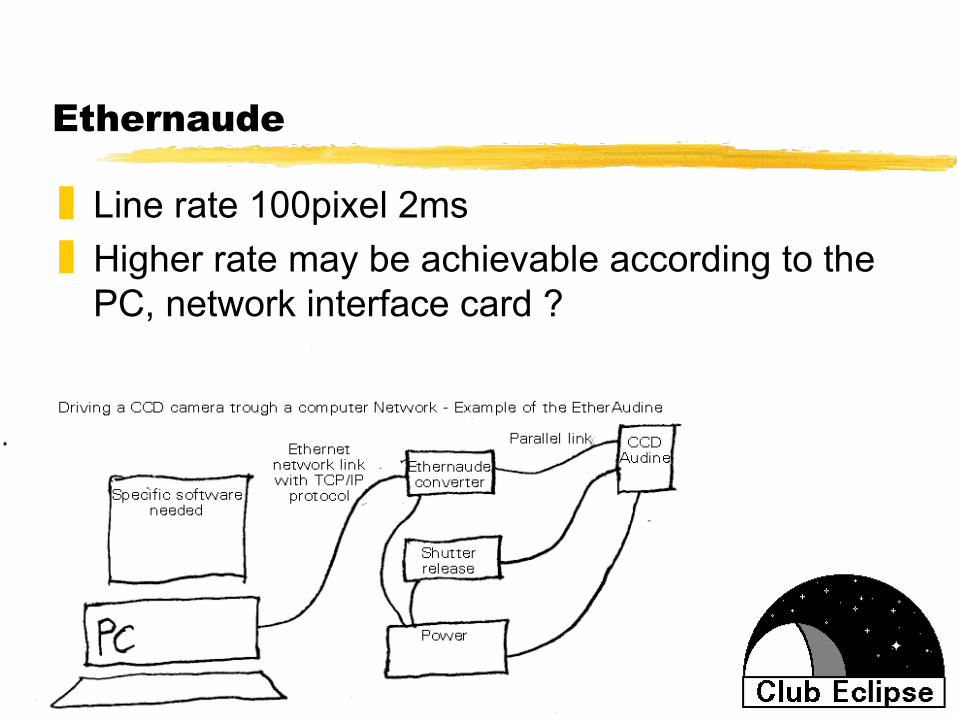
Ethernaude
❚ Line rate 100pixel 2ms❚ Higher rate may be achievable according to the
PC, network interface card ?

Stereoskopia event ethernaude recording
Test read CCD software written by Michel Meunier
20ms line rate
Timing accy 1ms from PPS GPS clocking
60cm telescope SNR 6

Titre du graphique
-10
0
10
20
30
40
50
60
70
80
90
100
0 1000 2000 3000 4000 5000 6000 7000
AmplitudeMoy. mobile sur 5 pér. (Amplitude)
stereoskopia
-20
-10
0
10
20
30
40
50
60
0 200 400 600 800 1000 1200 1400 1600
20ms 50Hz rate
Série1


EventAude
2004 Guy Detienne prototype realisation rely on : GPS receiver output (NMEA+ PPS) Internal Quartz Clock deliver 1ms accy analog TTL signal input or output Terminal software to read the serial port
No PC dependant Deliver digital timing of events to the PC Deliver synchro signal to drive a camera Aude association intends to manufacture it

EventAude

EventAude

EventAude

First EventAude test 31 jul 2004 Ara
-40
-20
0
20
40
60
80
100
120
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Cadence ligne 50ms SL-MLMoy. mobile sur 5 pér. (SL-ML)50ms 100pixels line rate
Cloudy conditions

5. The future
Measure the effective accuracy of low cost GPS receiver output vs TAI or UTC
Improve the accuracy of LW receivers Galileo Low cost availability of Eventaude and Quartz driven drift scan CCD
camera : Aude proposal Direct digital recording on PC from video camera
Through motion capture card Or through high rate bus link: USB2 or IEEE 1394
Digital high rate low light level camera L3CCD EBCCD or EBCMOS
Photon counting high rate digital camera Measure star diameter : 1ms = 10µas

Deconvolution of the edge?
-10
0
10
20
30
40
50
0 10 20 30 40 50 60 70
Série1Série2

Questions and Ref.
http://www.astrosurf.com/club_eclipse/ http://astrosurf.com/aude/ http://ibelgique.ifrance.com/astrophotoccd/EventAude http://perso.wanadoo.fr/julien .picot/astronomie/chronaude/
Rencontres du Ciel et de l’Espace 12-13-14 nov 2004 Paris