arranque industr motores asincronos ocr
DESCRIPTION
ARRANQUE MOTORES ASINCRONOSTRANSCRIPT
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 1/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 2/343
-----
ARRANQUE INDUSTRIALDE MOTORESASINCRONOS
Teoría, cálculo y aplicaciones

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 3/343
-
Serie McGraw-HiII de ElectrotecnologíasMcGraw-HilVIberdrola/Ente Vasco de la Energía
Coordinador de la serie:José María Merino Azcárraga
Doctor Ingeniero Industrial
ASEA BROWN BOVERI (ABB)
Revisión por:Luis Serrano Iribarnegaray
Catedrático de Máquinas Eléctricas
E.T.S. ING. INDUSTRIALES DE VALENCIA
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 4/343
ARRANQUE INDUSTRIALDE MOTORESASINCRONOS
Teoría, cálculo y aplicaciones
José María Merino Azcárraga
Doctor Ingeniero IndustrialIngeniero de Asea Brown Boveri, S. A.
McGraw-Hill
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 5/343
ARRAl QUE 1 DUSTRIAL DE MOTORES ASINCRONOS.
Teoría, cálculo y aplicaciones
No está permitida la reproducción total o parcial de este libro. ni su tratamientoinformático, ni la transmisión de ninguna forma o por cualquier medio, ya seaelectrónico, mecánico, por fotocopia, por registro u otros métodos, sin el permiso previo y por escrito de los titulares del Copyright.
DERECHOS RESERVADOS ©1995, respecto a la primera edición en español, por McGRAW-HILLIINTERAMERICANA DE ESPAÑA, S. A. U.Edificio Valrealty, I. a plantaBasauri, 17
28023 Aravaca (Madrid)
ISBN: 84-481-1633-XDepósito legal: M. 32.981/1999
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 6/343
A Carmen
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 7/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 8/343
CONTENIDO
PROLOGO . xv
INTRODUCCION XVI I
1. NOCIONES BASICAS. UNIDADES ESPECIFICASEMPLEADAS .
1.1. El problema del arranque de un motor asÍncrono 11.2. El sistema unitario, per-unit (PU) o porcentual (%) 5
2. DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO y ANALISIS DE LAS MAGNITUDES FISICASASOCIADAS 9
2.1. Ecuaciones generales que describen el arranque 92.1.1. Ecuaciones generales del movimiento 102.1.2. La generación del par electromagnético 132.1.3. Evolución de la corriente en el estátor y en el rotor. 13
2.2. Las características de arranque de los diversos motores 15
2.2.1. Motor de rotor bobinado o de anillos 192.2.2. Motor de rotor en cortocircuito..................... 212.3. Descripción de las máquinas accionadas por el motor....... 24
2.3.1. Par resistente 242.3.2. Inercia respecto al eje de giro 30
2.4. Cálculo de las magnitudes del arranque 332.4.1. Tiempo de arranque 33
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 9/343
VIII CONTENIDO
3. LOS MODOS DE ARRANQUE CONVENCIONALES 47
3.1. Modos convencionales de arranque para motores de rotor encortocircuito 473.1.1. Arranque directo 483.1.2. Arranque mediante resistencias en serie con el es-
tá tor 493.1.3. Arranque mediante reactancias en serie con el es-
tá to r .. 543.1.4. Arranque con transformador o autotransformador... 56
3.1.5. Arranque mediante conmutación estrella-triángulo... 603.1.6. Arranque mediante bobinado parcial............................ 663.1.7. Arranque con el motor de varias velocidades 673.1.8. Arranque con motor auxiliar 683.1.9. Arranque con bobinado partido 69
3.2. Modos convencionales para los motores de rotor bobinado.... 693.2.1. Arranque mediante resistencia rotórica trifásica 71
3.3. Arranques con dispositivos en la transmisión mecánica 753.3.1. Arranque con acoplamiento centrífugo 76
3.3.2. Arranque con acoplamiento hidráulico 773.3.3. Arranque con acoplamiento electromagnético 79
4. AR RA NCA DO RES ESTA TI COS 81
4.1. Arranque mediante arrancador estático (arrancador suave).... 814.1.1. Posibilidades de aplicación del arrancador estático.. 854.1.2. Otras opciones del arrancador estático 894.1.3. Instalación del arrancador estático 924.1.4. Descripción del arrancador estático 944.1.5. Especificaciones para el arrancador estático 97
4.2. Arranque mediante resistencia rotórica monofásica insertadaa pulsos 100
4.3. Arranque mediante variación de frecuencia estatórica J 02
5. EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO .. 105

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 10/343
CONTENIDO ix
5.4. El comportamiento energético del motor alimentado con
arrancador estático 1135.4.1. Energía disipada en el arranque estrella-triángulo. 1135.4.2. Energía disipada cuando se emplea el arrancador
estático 1155.5. El rendimiento propio del arrancador estático... . . . . . . . . . . . . 1165.6. El arrancador estático para ahorro energético 1185.7. Instalación de condensadores de corrección del factor de
potencia cuando se emplea el arrancador estático 1235.8. Aplicación del arrancador estático para evitar que los moto-
res funcionen largos períodos en vacío 1255.9. La reducción de la potencia eléctrica contratada 126
5.10. Comportamiento del arrancador estático con arranques su-cesivos 126
6. INFLUENCIA DE LA RED EN EL ARRANQUE 129
6.1. Capacidad de la red 1296.2. Características de la red según el nivel de tensión, las poten-
cias de transformadores y las características de las líneas... 1316.2.1. El transformador de alimentación 1316.2.2. Las líneas de alimentación 133
6.3. Problemas y limitaciones de la caída de tensión 1346.4. Cálculo práctico de una red para ver la influencia del arran-
que de motores 1356.5. Métodos de arranque para puntos débiles de la red 1396.6. El arranque del motor asÍncrono contra un alternador de
emergencia o en una red en isla 141
7. DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 145
7.1. Contactores e interruptores 1457.1.1. Elección de un contactor 147
7.2. Fusibles......................................................... 1487.3. Resistencias metálicas 1517.4. Resistencias electrolÍticas 1527.5. Temporizadores 1537.6. Diversos tipos de relés y sensores empleados 156
7.6.1. Relé térmico de protección........................... 1567.6.2. Relés magnéticos 1607.6.3. Relés de frecuencia 1607.6.4. Otros tipos de protecciones.......................... 161
7.7. Bobinas de reactancia 162
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 11/343
x CONTENIDO
7.9.2. Conmutadores, inversores 167
7.9.3. Conmutadores estrella-triángulo..................... 167
8. PROBLEMAS TERMICOS y MECANICOS EN ELARRANQUE 169
8.1. Calentamientos de estátor y de rotor 1708.1.1. Modelo simple de un solo cuerpo 1718.1.2. Modelo de los n cuerpos 1748.1.3. Distribución de temperaturas dentro de un cuerpo
homogéneo 1768.1.4. Temperaturas recomendadas para rotor y estátor... 1808.1.5. Datos prácticos sobre frecuencia de arranque permi-
tida 1818.2. Las solicitaciones mecánicas consecuencia del arranque 181
8.2.1. Fuerzas radiales alternas de las barras en el campomagnético de las ranuras 182
8.2.2. Esfuerzos axiales de dilatación dados por diferenciasde temperaturas 183
8.2.3. Esfuerzos axiales causados por distribución irregular de temperaturas dentro de la barra 184
8.2.4. Estudio del comportamiento de la jaula rotóricafrente a los pares pulsatorios torsionales 184
8.2.5. Generación de esfuerzos tangenciales debidos a laaceleración 185
8.2.6. Otros esfuerzos sobre los roto res 1868.2.7. Detalles constructivos para disminuir las fatigas ana-
lizadas 186
8.2.8. Cálculo detallado de esfuerzos en cabezas de bobina-do de estátor 188
8.2.9. Soluciones constructivas para el estátor 1898.3. Estudio torsional de la línea de ejes entre motor y máquina
accionada 1908.4. La influencia del arranque en la vida del motor 191
8.4.1. Vida de motores críticos por el rotor 1928.4.2. Vida de motores críticos por el estátor 1948.4.3. La mejora de la vida útil de los motores gracias a los
sistemas de arranq ue de intensidad red ucida 1978.5. Ensayos especiales de arranque para cualificar motores 1978.6. Observaciones sobre el análisis de los fenómenos transitorios. 200
9. ESPECIFICACIONES DE LOS COMPONENTES DE LOSEQUIPOS DE ARRANQUE 201
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 12/343
CONTENIDO XI
9.2.1. Elección de contactores 203
9.2.2. Contactores para arranque de motores de cortocir-cuito 204
9.2.3. Contactores para motores de rotor bobinado 2049.2.4. Contactores para conectar autotransformadores de
arranq ue ..... .. .. . .. . .. . . .. .. ... . .. . .. .. .. ... .. . . .. .. . . 2069.3. Características de los arrancadores estrella-triángulo 2079.4. CarasterÍsticas de las resistencias metálicas 2079.5. Características de las reactancias 2089.6. Características de los autotransformadores 208
,10. APLICACIONES Y SELECCION DE LOS MODOS DEARRANQUE 209
10.1. Campos de aplicación de cada tipo de arranque 21010.1.1. Arrancadores para motores de rotor bobinado.. 21210.1.2. Arranque directo 21210.1.3. Arranque estrella-triángulo 21210.1.4. Arranque mediante autotransformador 21210.1.5. Arranque con resistencias en serie con el estátor. 21310.1.6. Empleo del arrancador estático suave 21310.1.7. Algunas aplicaciones concretas de arrancado res
estáticos 21410.1.8. La mejora de la vida en los equipos gracias al
arrancador estático 21610.2. Recapitulación de los modos de arranque 217
10.2.1. Modos más frecuentes para cualquier tipo de mo-tor asíncrono 217
10.2.2. Modos de arranque especiales 21710.3. Cuestionario completo con todos los requisitos para el estu-
dio completo del arranque 21810.3.1. Características ambientales 21810.3.2. Características de la alimentación 21810.3.3. Líneas de alimentación eléctrica 21910.3.4. Transformador de acoplamiento 21910.3.5. Datos complementarios de la planta en la que se
instala el motor 22010.3.6. Condiciones de la máquina accionada 22010.3.7. Motor de accionamiento 220
10.4. Método simple para elegir el modo de arranque 22110.5. Cálculo simplificado de la caída de tensión 22110.6. Especificación de los equipos de arranque 22410.7. La comparación económica entre los diversos modos de
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 13/343
XII CONTENIDO
10.7.3.
10.7.4.10.7.5.10.7.6.
Los costes de mantenimiento 226
Pérdidas de producción 226Costes generales 227Evaluación de atributos varios 227
11. EVOLUCION DE LA TECNOLOGIA y OBSERVACIONESFINALES 229
11.1. Evolución en los modos de arranque 22911.2. Tendencias en las redes eléctricas 23011.3. Evolución en componentes convencionales 2311104. Evolución de los arrancadores estáticos.................... 233
11.4.1. Normalización de arrancado res estáticos 23311.4.2. Evolución previsible en los tiristores 23411.4.3. Evolución en las funciones de control 235
11.5. Observaciones finales 236
APENDICES
A.1. DESARROLLOS TEORICOS COMPLEMENTARIOS 239
A .1.1. Teoría del motor asíncrono 239AJ.2. Teoría del motor asíncrono en régimen estacionario 241A.1.3. El circuito equivalente 245
A.I.3.1. Esquema equivalente del motor de anillos 247A.1.3.2. Esquema equivalente del motor de cortocir-
cuito.. . . . . . .. .. .. . .. .. . . . . . . . . . . .. . . . . .. . . . . . . . .. 248AJA. El diagrama del círculo 249A.I.5. El balance de flujo energético simplificado 250A.l.6. El calentamiento de conductores en régimen adiabático. 251A.1.7. Contenido en armónicos del regulador de tensión alterna. 253
A.I.7.1. Corriente en el circuito controlado por un re-gulador de tensión alterna monofásico 254
A.1.7.2. Corriente en el circuito controlado por un re-gulador trifásico 259
A.1.7.3. Circuito controlado por un regulador trifásicosemicontrolado 261
AJ.8. Los conceptos de potencia activa, reactiva y aparente encorrientes rectificadas 262
A.2. DA TOS TECNICOS 267
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 14/343
CONTENIDO XIII
A.2.3. Datos de contactores de vaCÍo de media tensión para
motores asíncronos 270A.2.4. Clasificación de contactores para corriente alterna 271A.2.5. Características de materiales para resistencias metá-
Iicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272A.2.6. Especificaciones para resistencias 273A.2.7. Cálculo de resistencias de arranque de motores de rotor
de anillos 275A.2.8. Cálculo térmico de las resistencias para arranque de
motores................................................... 276
A.2.9. Resistividad a 18°C de soluciones acuosas para reósta-tos líquidos 276
A.2.10. Características de arrancadores estáticos 277A.2.11. Valores característicos de transformadores de distribu-
ción 285A.2.l2. Valores de referencia para resistencias y reactancias de
líneas aéreas 285A.2.13. Características de motores asíncronos de cortocircuito. 286
A.3. EJEMPLOS COMPLEMENTARIOS 291
A.3.1. Estudio detallado del arranque de un motor asíncrono derotor bobinado calculando sus características con el cir-cuito equivalente 291
A.3.2. Estudio detallado del arranque de un motor asíncrono decortocircuito con resistencias en el estátor 293
A.3.3. Estudio detallado del arranque de un motor asíncrono conautotransformador de dos escalones de tensión 295
A.3.4. Estudio de la aplicación de un arrancador estático 296
AA. DIAGNOSTICO DE AVERIAS DEL ROTOR 301
AS RELACION DE FABRICANTES Y SUMINISTRADORESDE EQUIPOS DE ARRANQUE 303
A.6. NORMALIZACION SOBRE ARRANQUE DE MOTORES
ELECTRICOS 305
A.7. VOCABULARIO Y ACRONIMOS EMPLEADOS 307
A.8. REFERENCIAS BIBLIOGRAFICAS 313
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 15/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 16/343
PROLOGO
En los últimos años parece observarse en España un modesto, pero innega- ble, despliegue cultural de nuestra literatura técnica en el área de la ingenie-
ría eléctrica de potencia. El libro que el lector tiene en sus manos es unacontribución en esa línea que no puedo por menos de saludar con gransatisfacción.
El arranque de los motores eléctricos de inducción, pese a ser un temaya clásico con una importancia práctica y unas repercusiones industrialesfuera de discusión, resulta no obstante un tema que, con frecuencia, no es bien comprendido en todos sus extremos, incluso por ingenieros eléctricos.Su análisis implica una visión panorámica a la vez que integradora de problemas pertenecientes a diferentes ramas de la técnica, destacando sobre
todo los de índole mecánica (por ejemplo, solicitaciones dinámicas), eléctri-ca (por ejemplo, sobrecorrientes de arranque y caídas de tensión) y térmica(por ejemplo, número de arranques consecutivos que no excedan las tempe-raturas límites toleradas), sin olvidar los aspectos económicos, que siempre
juegan un papel destacado en la industria a la hora de elegir la soluciónconsiderada más conveniente.
El libro de José María Merino proporciona, a mi juicio, un tratamientosuficientemente amplio del tema, cubriendo todas las vertientes básicas precisadas, así como otros aspectos complementarios; y tiene el gran mérito
de saber hacerlo en el marco de una exposición clara y didáctica, quecombina armoniosamente el enfoque industrial con la necesaria fundamen-tación teórica de los temas en estudio.
El primer punto queda de manifiesto, entre otras cosas, en la cuantiosainformación técnico-comercial relacionada con el contenido del libro, proce-dente de las principales empresas existentes en el mercado español (lo que
. . .

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 17/343
xvi PROLOGO
autor y recogidos en formas de tablas o gráficas elaboradas por él, contie-
nen información que, posiblemente, sea novedosa e interesante incluso paraingenieros versados en la materia.
En cuanto a las formulaeiones y planteamientos teóricos (imprescindi- bles en todo texto técnico que quiera proporcionar conocimientos sólidos yduraderos, en los cuales radica siempre la capacidad para la resolucióncreativa de problemas) están, en general y en mi opinión, adecuadamentedosificados. Su nivel está trazado de manera que rara vez supera los requisi-tos exigibles a un técnico de grado medio. Para problemas puntuales máscomplejos, objeto de investigaciones modernas, de gran interés industrial
y práctico sobre todo en motores grandes, el autor describe el problema yremite al especialista y al lector interesado, mediante referencias precisas, ala correspondiente bibliografía. Esa breve descripción, por otro lado, permi-te al no especialista adquirir una rápida idea de la investigación en curso enel campo tecnológico tratado en este libro, y ser consciente de la aparición potencial de problemas no muy frecuentes (y quizás por ello desconocidoshasta ahora para él), pero que pueden ser claves en determinadas circuns-tancias.
Por todo lo anterior, estoy convencido de que el libro ha de encontrar
una favorable acogida en muchos miembros de nuestra comunidad técnica, para quienes su lectura resultará de gran interés y utilidad en el campo de suactividad profesional.
Valencia, septiem bre de 1995
LUIS SERRANO IRIBARNEGARAY
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 18/343
INTRODUCCION
Vaya comenzar describiendo el tipo de lector que he considerado al escri- bir el libro. Creo que para un libro técnico es necesario algún comentariosobre el lector potencial. Pretendo que de la lectura de esta obra saquen provecho todos los técnicos interesados en el arranque de los motores eléc-tricos a partir del nivel medio. Espero que los técnicos superiores vean eneste libro cosas interesantes y que también personas que provienen del cam- po de la Formación Profesional extraigan conocimientos prácticos para suaplicación inmediata.
Quisiera que este libro sea también de consulta, por tanto, se ha estruc-turado para que de forma rápida se pueda sacar el dato o la referencia quese ha olvidado. Así, esta información aparecerá en índices o apéndices. Perode todos los modos el libro está escrito para que se pueda leer de seguido.
También me parece oportuno decir algo sobre temática elegida. Elarranque de los motores eléctricos es un viejo clásico, que liga unos cuantosaspectos de la técnica dentro del mismo problema. Así, nos hallaremos conlas ecuaciones de la dinámica que definen la cinemática del arranque.Veremos que hay un problema eléctrico de cálculo de pérdidas en el seno
del motor y de las influencias que el motor origina en la red eléctrica que loalimenta. También aparecen problemas térmicos ligados a la disipación decalor y a su almacenamiento. Incluso es necesario acudir a teorías sobre elenvejecimiento.
Este libro se enmarca en la serie denominada ELECTROTECNOLO-GIAS, destinada a llamar la atención sobre las mejoras que son posibles _1_,,-_._ _.. ." • ....-
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 19/343
XVIII INTRODUCCIO
está su facilidad de ser controlada y su posibilidad de provocar variados
procesos físicos de interés en las aplicaciones industriales.Otra de las ventajas de los arranques más correctos es el incremento
de la vida de los equipos, y en particular los motores y las máquinas ac-cionadas.
El arranque de motores se resuelve con tecnologías maduras y no se prevén evoluciones importantes en las mismas. Ha habido hace algunosaños una entrada importante de los arrancado res electrónicos como unasolución m<:lsa este problema. Se puede esperar alguna reducción de loscostes de estos arraneadores, por lo que se extenderá su empleo. Pero
desgraciadamente los arraneadores no constituyen la solución general paratodos los problemas de arranque de motores eléctricos.
El libro está dedicado, en su totalidad, al estudio del arranque del mo-tor de corriente alterna asíncrono, ya que es el accionamiento más fre-cuente.
Se va a tratar de obtener un libro muy práctico, a partir de un iniciosuficientemente teórico. Se pretende que el lector pueda encontrar el método para solucionar sus problemas. Para ello el autor ha solicitado y obtenidoinformación técnico-comercial de las principales empresas presentes en el
mercado español en la fecha de redacción. La respuesta ha sido muy caluro-sa. Todos estos fabricantes van relacionados al final del libro, en el Apéndi-ce A.5. Desde estas líneas va el mejor de los agradecimientos por su ayuda.Se han empleado algunas de sus fotografías, esquemas, datos e informacio-nes. La inserción de los mismos se ha hecho a juicio del autor. El únicocriterio empleado en la selección ha sido tratar de lograr un libro claro ydidáctico.
Manifiesto también que mi trabajo como autor ha estado presidido por la más absoluta neutralidad a la hora de tratar las informaciones técnico-
comerciales procedentes de los fabricantes; el posible desequilibrio que pu-diera aparecer no es en absoluto deliberado.Como puede haber lectores que precisen aclaración o recordatorio sobre
algunos conceptos, se incluye explicación detallada de los mismos en elApéndice A.l. No es precisa la lectura de los mismos para la comprensióndel libro.
Finalmente deseo dar unas indicaciones sobre la metodología empleadaen la elaboración de este libro. He empleado el ordenador como herramien-ta, prácticamente única, en la realización completa del mismo. Para ello he
tenido la ayuda inestimable de modernos programas de informática deusuario a lo largo de toda mi labor. Así, la obra ha sido tecleada directa-mente en un procesador de textos y se ha minimizado, de una formaimportante, el número de copias sacado por la impresora. En lo que serefiere a figuras y con la excepción de las tomadas de firmas comerciales, elresto han sido generadas directamente en ordenador con una moderna
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 20/343
INTRODUCCION xix
mos ante gráficos «vivos». Para algunos cálculos se ha hecho uso del
analizador analógico TUTSl M(MR).
y para terminar, el agradecimiento a lberdrola, S. A., y al Ente Vasco dela Energía (EVE), con cuyo patronazgo ha sido posible que este libro veala luz.
Bilbao, año de 1995EL AUTOR
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 21/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 22/343
CAPITULO
UNO
NOCIONES BASICAS.UNIDADES ESPECIFICAS EMPLEADAS
En este capítulo vamos a encuadrar el problema del arranque de un motor eléctrico. Como ya se ha advertido en el prólogo, la obra está destinada al
motor asíncrono. También dedicaremos una parte de este capítulo a la des-cripción del sistema de unidades llamado unitario (o per-unil, en la literatu-ra técnica anglosajona). La razón de introducir una explicación de este sis-tema viene dada porque en máquinas eléctricas su empleo es muy frecuente,y como veremos más adelante es muy cómodo.
1.1. EL PROBLEMA DEL ARRANQUE DE UN MOTOR
ASINCRONO
Dentro de los motores asíncronos tenemos dos eJecucIOnes fundamen-tales:
De rotar en cortocircuito o de jaula de ardilla.De rotar bobinado o de anillos rozantes.
Esta explicación introductoria vamos a hacerla tomando como base elmotor de jaula, pues en comparación con el de rotar bobinado, tiene unarranque más difícil y además el arranque de este último es simplemente uncaso particular del primero.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 23/343
2 ARRA QUE INDUSTRIAL DE MOTORES ASI CRONOS
Tiempo
Tiempo
Tiempo
Figura 1.1. Oscilograma que da la variación temporal, durante el arranque deun motor asíncrono de jaula, de: intensidad, par motor, velocidad.
El motor de jaula es un motor robusto y barato, ya que se fabrica en
masa, pero tiene el inconveniente fundamental de que no es regulable; enconsecuencia, una vez elegido da un par motor y una corriente absorbidaque sólo dependen en principio de:
La tensión de alimentación, bastante constante.La velocidad por la que está pasando en cada momento del arranque.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 24/343
NO CION ES BA SICA S. UN IDAD ES ES PECIFICA S EM PLEA DA S 3
Debido a esta baja inercia varían fuertemente todas las magnitudes
durante el arranque, ya que el par electromagnético generado es función dela posición angular entre rotar y estátor en cada momento. Afortunada-mente para motores más grandes, arrancando en carga y con inerciasacopladas más importantes, esta situación en la evolución de la velocidadno se da y se hacen menos patentes las oscilaciones en la variación del par motor. Sin embargo, hemos elegido este ejemplo para ver el problema entoda su generalidad.
Empezaremos por describir la evolución de la intensidad de una fasecualquiera, ya que la de las otras dos es semejante. Vemos que desde el
primer momento asciende a un valor muy alto, varias veces superior alnominal, y oscila a la frecuencia de la red. Además, esta corriente tarda en bajar a valores cercanos al nominal y su magnitud inicial es independientedel par resistente que la carga opone durante la aceleración.
El par motor tiene también al principio unos valores no tan altos, sobretodo si se considera que es producido por corrientes elevadas; además, enlas primeras fases de este arranque es oscilante, por lo que al motor «lecuesta tomar velocidad». Solamente a partir del 40% del inicio hay unazona de par positivo que es el que realmente acelera al motor. En la parte
final, el par motor vuelve a tener una oscilación rápidamente amortiguadaque converge hacia el valor final de par necesario (nulo en nuestro caso por ser un arranque en vacío).
Consecuencia lógica del par motor es la evolución de la velocidad. Asívemos que en la primera fase hay oscilaciones relativamente importantes develocidad, y que hasta que el par motor no tiene un valor medio positivo nose da el incremento más importante de velocidad. Una vez transcurrida estafase hay unas oscilaciones menores y ya más amortiguadas.
Vemos también que el par motor es incontrolable, por lo que puede ser
escaso para una especificación de arranque dada, o puede ser excesivo produciendo inconvenientes en ambos casos.Vamos a volver de nuevo a las altas corrientes. Las corrientes que
aparecen en el registro de la Figura 1.1 son las que el motor absorbe por su bobinado de estátor. Sin embargo, aunque no medibles en motores de jaula,las corrientes de rotar son también muy importantes. A lo largo de la obrase verá la relación que existe entre ambas. Estas corrientes elevadas, unidasa arranques de larga duración, tienen las siguientes consecuencias:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 25/343
4 ARRANQUE INDUSTR1AL DE MOTORES ASINCRONOS
• Fallo prematuro del motor por sobrepasar un componente delica-
do, como el bobinado, la temperatura máxima admisible paraserVICIOseguro.
• Si no hay fallo prematuro, acortamiento de la vida útil esperadadel motor.
• Necesidad de limitar el número de arranques si no se quiere com- prometer la vida del motor.
La incontrolabilidad del par puede dar problemas mecánicos en ciertas
aplicaciones, en las que se desea obtener un gradiente o rampa de velocidaddeterminada.
En el arranque de un accionamiento eléctrico conOuyen dos problemas principales:
- Resolución de las ecuaciones de la dinámica de los cuerpos en rota-ción para verificar el paso entre la situación de rotor parado y la delrotor a plena velocidad, tal como se ve en el registro inferior de laFigura 1.1.
Un problema eléctrico para determinar el par motor producido elec-tromagnéticamente (véase la parte central de la Figura l.l) Y laintensidad (véase la parte superior) en cada instante, dados por:
• Los datos del motor.• Las condiciones de la alimentación.• El control que se realice sobre el motor.
Para finalizar el estudio eléctrico haremos también:
• La determinación de las caídas de tensión en los puntos mássensibles de la red.
Finalmente, ejecutaremos un análisis térmico en base a las pérdidaseléctricas calculadas en la fase anterior, dando como resultados:
• Calor almacenado por los bobinados del motor y, por tanto, latemperatura que alcanzan al final del arranque.
• Calor que disipa el motor al medio ambiente.• Estimación de la cadencia de arranques que puede hacer el motor,
o el descanso que tiene que tomar después de un arranque duro.• Estimación de vida útil expresada en número de arranques en
condiciones determinadas.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 26/343
NOCIONES BASICAS. UNLDADES ESPECIFICAS EMPLEADAS 5
continuación se pasa revista detallada a los modos de arranque para las
diversas aplicaciones, divididos en convencionales y electrónicos. Se descri- ben los componentes de los sistemas de arranque y sus especificaciones básicas. También se atiende a las especificaciones técnicas de los sistemas dearranque más usuales. La capacidad de la red es de importancia fundamen-tal en el estudio del arranque, y a su estudio se destina la extensión necesa-ria con los supuestos principales. Se tiene en cuenta el rendimiento energéti-co de los sistemas de arranque estático, junto con otras prestaciones deestos arrancado res, tales como los armónicos generados y la absorción de potencia reactiva. Los problemas térmicos y mecánicos se cubren a conti-
nuación. Se presentan de forma esquemática las directrices para seleccionar el modo idóneo de arranque. La obra acaba con un capítulo dedicado a la prospección del futuro sobre métodos de arranque y a ciertas observacio-nes finales.
1.2. EL SISTEMA UNITARIO, PER-UNIT (PU)O PORCENTUAL (%)
Se supone que el lector conoce el sistema de unidades empleado habitual-mente en electrotecnia; sin embargo, a la hora de realizar muchos cálculosen este libro se acude al sistema unitario, también denominado per-unit, y
que en el caso de expresar las magnitudes respecto a cien (100) se ledenomina porcentual (%). Este sistema ofrece como ventajas fundamentales:
Una estimación rápida del nivel que está tomando una magnitud con
respecto a los valores que se han fijado como valores base o dereferencia, que normalmente son los nominales del motor o equipo.
- Cada característica importante varía sólo en campos estrechos. Así, podremos comparar máquinas de potencias y tensiones nominalestotalmente diferentes y evaluar de un vistazo su régimen de funciona-miento.En muchos casos las ecuaciones se pueden simplificar de coeficientes. .innecesarIOs.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 27/343
6 ARRANQlJF I DUSTRIAL DF MOTORES ASINCRONOS
ü = N, / N.
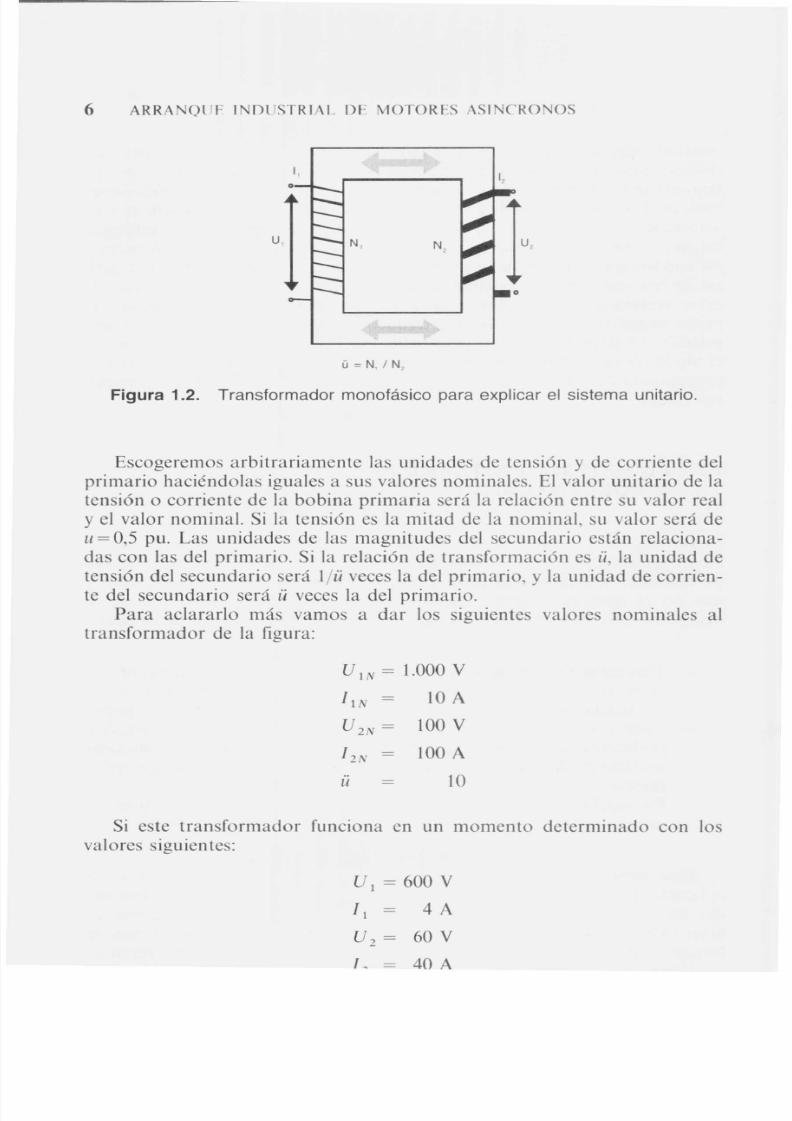
Figura 1.2. Transformador monofásico para explicar el sistema unitario.
Escogeremos arbitrariamente las unidades de tensión y de corriente del primario haeiéndolas iguales a sus valores nominales. El valor unitario de latensión o corriente de la bobina primaria será la relación entre su valor real
y el valor nominal. Si la tensión es la mitad de la nominal, su valor será deu = 0,5 pu. Las unidades de las magnitudes del secundario están relaciona-das con las del primario. Si la relación de transformación es ü, la unidad detensión del secundario será I/ü veces la del primario, y la unidad de corrien-te del secundario será ü veces la del primario.
Para aclararlo más vamos a dar los siguientes valores nominales altransformador de la figura:
U IN = 1.000 V
fIN = 10 A
U2N = 100 V
f 2/1' 100 A
u 10
Si este transformador funciona en un momento determinado con losvalores siguientes:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 28/343
NOCIO ES BASICAS. UNIDADES ESPECIFICAS EMPLEADAS 7
lores base, el régimen de funcionamiento viene expresado de forma más
simple en pu por:
U 1 = u2 = 0,6 pu
i1 =;2 = 0,4 pu
Convencionalmente las magnitudes en pu se expresan con los mismossímbolos literales pero en letras minúsculas.
Hemos visto cómo se opera con tensiones y corrientes; por semejanza setoma como unidad de resistencia de una bobina al valor tal en el que la
unidad de corriente produce una caída de tensión unidad.Al definirse mediante una relación, las magnitudes son adimensionales.El juego de valores de referencia elegido ha de ser coherente, es decir,
que todas unidades de referencia o de base se han de derivar de unas pocasfundamentales de acuerdo con las ecuaciones básicas.
El sistema unitario o porcentual viene definido por la relación entre losvalores reales de una magnitud y los valores que se denominan como de
base o de referencia.
Yalor de la magnitud real- Tanto por uno (p.u.) = ----------Yalor de la magnitud base
Yalor de la magnitud real- Sistema porcentual (%) = dI' d x 100
Yalor e a magnttu base
Para el estudio en régimen permanente del motor eléctrico trifásico delas siguientes características:
P N : Potencia nominal (kW)
U N : Tensión nominal (Y)
YJN : Rendimiento nominal (%)
cos < P N : Factor de potencia nominal (%)
110 : Yelocidad síncrona (r.p.m.)
se toman las siguientes magnitudes base o de referencia:
Base de tensiones : U B = U N
Base de potencias : P B = P N' 10.000/( r ¡ N ' cos < P N)
Base de intensidades : lB = P B ' 1.000/(.)3 . U B )
Base de resistencias e impedancias : Rn = U nlI"

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 29/343
8 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Como los valores base o de referencia pueden ser arbitrarios, también se
pueden usar otros que difieren del conjunto anterior, que está basado en losvalores eficaces. Así, para el caso de análisis transitorios en los que laevolución temporal de las magnitudes es rápida, se suelen referir los valoresrespecto de la amplitud o valor máximo; en este caso se recomiendan lossiguientes:
Base de tensiones : U s = j2. U N
Base de intensidades: Is = j2.PN ·IO.000/( j3·/ lN·CO S<P N· Us)
Base de potencias : P s = m · U s' I sBase de resistencias : R s = U sil s
Base de velocidades : QN = 2· n· 110160
Base de flujos : <D s = j2,U N
I(2'n1N)
Base de tiempos : Is = IIU~' 2· n)
Base de pares : es = P slQN
Las bases de potencias y de intensidades son válidas tanto para susvalores activos como para los reactivos y los aparentes.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 30/343
CAPITULO
DOS
DESCRIPCION GENERAL DEL ARRANQUEDEL MOTOR ASINCRONO y ANALISIS
DE LAS MAGNITUDES FISICAS ASOCIADAS
En este capítulo vamos a explicar los fundamentos teóricos del arranque delmotor asíncrono, con el nivel necesario para la compresión completa del
proceso. Se comienza dando las ecuaciones generales que describen o mode-lizan la generación de par electromagnético, las corrientes de rotor y deestátor, el movimiento y los pares durante el proceso, la energía disipada enestátor y rotor. A continuación, se revisan las características prácticas de par motor y corriente que dan los motores de jaula y los de rotor bobi-nado. Seguidamente, se hace una revisión de las principales característicasde la máquina accionada durante esta fase de arranque. Se continúa elcapítulo con un apartado dedicado al cálculo de características, tales comotiempo de arranque, calentamientos, frecuencia de arranques y balance
energético.
2;1. ECUACIONES GENERALES QUE DESCRIBENEL ARRANQUE
Vamos a comenzar estableciendo la ecuación que rige el movimiento delmotor y de la máquina acoplada en cualquier condición. Se supone que, en
la mayor parte de los casos, la máquina se acopla al motor de forma rígidade modo que se pueden considerar como un volante único de acuerdo conlo esquematizado en la Figura 2.l.
Se estudia únicamente el movimiento de rotación. En el caso de losmotores lineales es necesario el estudio del movimiento de traslación.En accionamientos en los que el movimiento de la máquina es lineal
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 31/343
10 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Angulo giradoCr
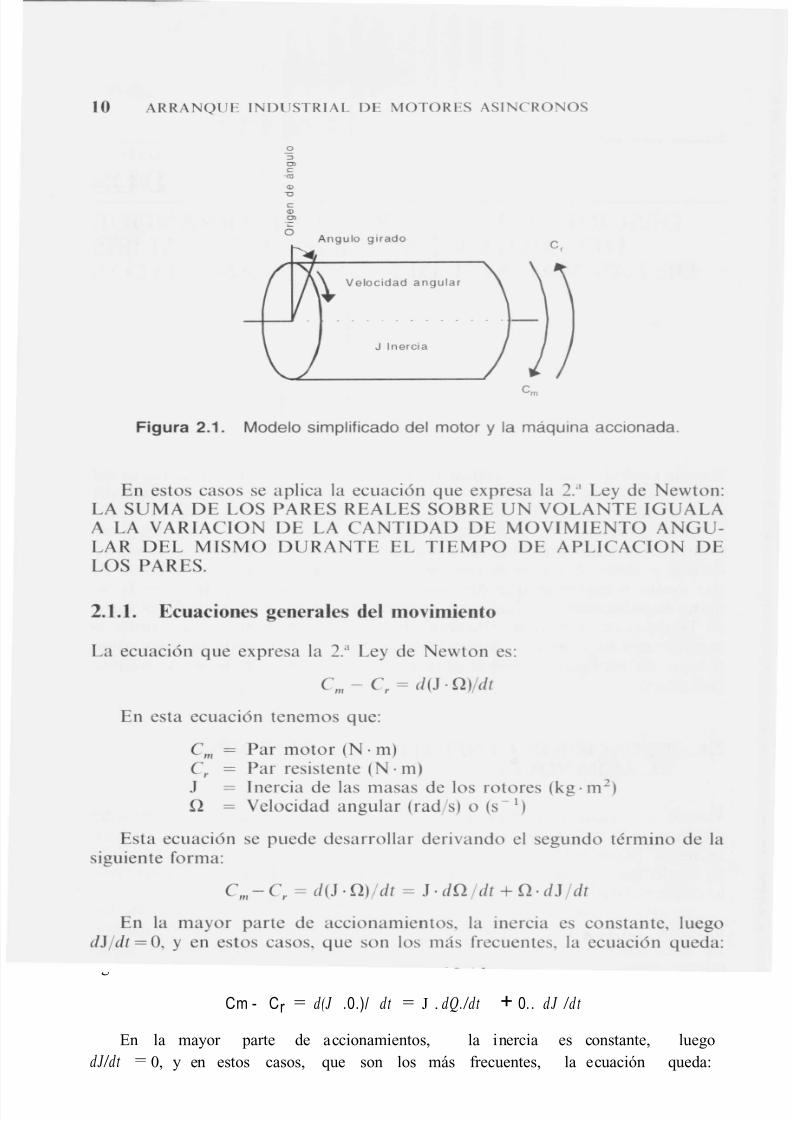
Figura 2.1. Modelo simplificado del motor y la máquina accionada.
En estos casos se aplica la ecuación que expresa la 2." Ley de Newton:LA SUMA DE LOS PARES REALES SOBRE UN VOLANTE IGUALAA LA VARrACION DE LA CANTIDAD DE MOVIMIENTO ANGU-LAR DEL MISMO DURANTE EL TIEMPO DE APLICACION DELOS PARES.
2.1.1. Ecuaciones generales del movimiento
La ecuación que expresa la 2." Ley de Newton es:
Cm - Cr =
d(J ·0.)/dt
En esta ecuación tenemos que:
C m Par motor (N· m)Cr Par resistente (N· m)J r nercia de las masas de los rotores (kg· m 2 )
0. Velocidad angular (rad/s) o (s -1)
Esta ecuación se puede desarrollar derivando el segundo término de lasiguiente forma:
Cm - Cr = d(J .0.)/ dt = J . dQ./dt + 0.. dJ /d t
En la mayor parte de accionamientos, la inercia es constante, luegodJ/dt = 0, y en estos casos, que son los más frecuentes, la ecuación queda:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 32/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 1 1
Sin embargo, existen casos de máquinas accionadas con inercia variable
en los que ya no se cumple dJ/dt=O; esto sucede con robots, accionadores,centrifugadoras, enrolladoras de cable, bobinadoras ... En estas situacioneshay que conocer la ley temporal de variación de la inercia J = f( t) y aplicar laecuación general.
Las otras magnitudes son esencialmente variables y dependen, en gene-ral, de diversas de ellas; así, tendremos que los pares motor Cm y resisten-te C r cumplen en general que:
Cm = f(o., E, t)
Cr = .f'(o., E, t)
siendo:
o . Velocidad angular (rad/s) o (S-I)
E Espacio angular recorrido (rad)t Tiempo (s)
por tanto, la integración de esta ecuación tendría que tener en cuenta estenúmero de variables.
Existen, sin embargo, bastantes casos particulares, tanto para el par motor como para el resistente, en los que la dependencia es únicamente dela velocidad:
Esto sucede para el par motor de motores asíncronos cuando la acelera-ción es suficientemente lenta y no intervienen las variaciones del flujomagnético para las diferentes posiciones relativas del estátor y del rotar.Todos los casos presentados para análisis en el presente libro los podremoshacer con esta forma de función.
En lo que se refiere al par resistente, son muy pocos los casos en los queaparece con la forma C r =.f'(o., E, t), y lo más normal es que siempre tome laexpresión simplificada Cr=.f'(o.).
Existen algunos casos de máquinas accionadas cuyo par resistente es
algo más complejo y corresponde a la expresión:
Son las máquinas alternativas de émbolos y pistones, tales como los

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 33/343
12 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
posible hacer la descripción completa del movimiento. Necesitamos ahora
ecuaciones procedentes de la cinemática, que son las siguientes:o = dE/d I
7. =dOjdt = (¡l E dt 2
en las que:
7. = Aceleración angular (rad/s2)
Estas ecuaciones también se pueden expresar en forma integral del
modo siguien te:O=J7..dt
E = SO·dl
En la integración de estas ecuaciones habrá que considerar los valoresiniciales. Vamos a recordar aquí los dos casos más sencillos.
Movimiento uniforme
7. = O
O = Cte
E =Eo + O· t
Movimiento uniformemente aceLerado
'Y . = Cte
O = 00 + 7..[
E Eo + no ·[ + 1? 7..12
02 = 002 + 2·;·E
Hemos visto a lo largo de toda esta presentación que las unidadesempleadas son las del SI y, de este modo, las fórmulas no necesitan coefi-cientes de conversión. Se recomienda el empleo de este sistema de unidades.En lo que se refiere a la velocidad angular y en aplicaciones técnicas, no estámuy introducido el radián/segundo. A continuación damos sus equiva-
lencias:O(rad/s) = 2· n· 0(r.p.m.)/60 =0,104719· O(r.p.m.)
O(r.p.m.) = 60· 0(rad/s)/(2· n) = 9,54929· O(rad/s)
Que también se pueden expresar simplificada mente como sigue:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 34/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 13
2.1.2. La generación del par electromagnético
Vamos a referimos a la generación del par electromagnético en el motor asíncrono.
En el Apéndice A.1.1 se ve que el par motor se genera electromagnética-mente por interacción del flujo en el entrehierro con la corriente rotórica; sufórmula en roto res sin efecto pelicular es:
Cm = 2/3·Lm·lm[il(t)·(!2(t)·e jE ( t» ) * ]
La anterior es una función que depende de magnitudes de variaclOnrápida, tales como las corrientes y el ángulo relativo entre rotor y estátor.Podemos resumir que el par electromagnético responde a una expresión deltipo:
Cm = f(Q, E, t)
En los casos que encontramos normalmente en la práctica, las compo-nentes que dependen del tiempo se desvanecen a los pocos períodos despuésde la conexión del motor y se puede eliminar la dependencia de la variable t
(tiempo). Algo similar sucede con la influencia del ángulo de posición, y
además el crecimiento de velocidad está, como se verá enseguida, condicio-nado por la inercia total J a acelerar. Si nos volvemos a la Figura 1.1 vemosque lo que importa en todos los arranques es el valor medio de la curva de par con respecto al tiempo, es decir, la integral de esta función. Esta integrales positiva y creciente con el tiempo y, por tanto, el motor arranca, a pesar de las oscilaciones de velocidad de los primeros instantes (no se debe deolvidar que el caso de arranque presentado en la Figura 1.1 es especial talcomo allí se indicó).
En resumen, para aplicaciones normales el par electromagnético depen-de de la velocidad angular:
Cm = f(Q)
y su valor se obtiene o bien en las curvas que dan los fabricantes, o secalcula conociendo las características de resistencias y reactancias del mo-tor, por medio del circuito equivalente, como se indica en el Apéndice A.1.3.
En el Apartado 2.2 detallaremos las características de arranque de losmotores asíncronos.
2.1.3. Evolución de la corriente en el estátor y en el rotor
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 35/343
14 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La corriente rotórica L z es la que origina el par, de modo que para paresnulos esta corriente es nula.
La corriente magnetizan te L " . está condicionada por el estado magnéticodel motor, y depende de las siguientes variables:
- Tensión aplicada al motor. Crece con la tensión.Diseño del motor:
• Es mayor para motores lentos .• Crece con el entrehierro .• Crece para los circuitos magnéticos de baja calidad.
Para un motor dado alimentado con tensión constante, esta corriente permanece prácticamente fija, en régimen estacionario, y sus valores oscilanentre el 10715% I N para motores grandes, rápidos y de buen diseño, y el50 ...:. .60 % 1N para motores pequeños, lentos y de mal diseño.
Si recordamos el circuito equivalente, en su expresión más simplificada(véase Apéndice A.l.3), vemos que para el motor parado el deslizamiento ess = 1. A medida que el motor acelera el deslizamiento decrece hasta losvalores del punto de funcionamiento s = 0,01"':" 0,05. Esto quiere decir que la
resistencia rotórica aparente Rz/s varía mucho desde valores bajos al iniciodel arranque hasta valores que pueden ser entre 100...:..20 veces superiores alvalor inicial, cuando el motor está en su punto de trabajo.
Por tanto, la rama del circuito equivalente por la que circula la corrienterotórica pasa de:
Situación de arranque con s= 1, y baja resistencia que hace que estarama sea muy reactiva y absorba altas corrientes muy desfasadasrespecto de la tensión aplicada.
Situación de funcionamiento con s = 0,01"':" 0,05, y alta resistencia quehace que esta rama sea muy resistiva y absorba bajas corrientes con poco desfase.
En régimen de arranque, con bajo flujo, la corriente L " . es muy baja, por lo que la corriente del estátor L 1 sigue una evolución muy similar a la delrotar.
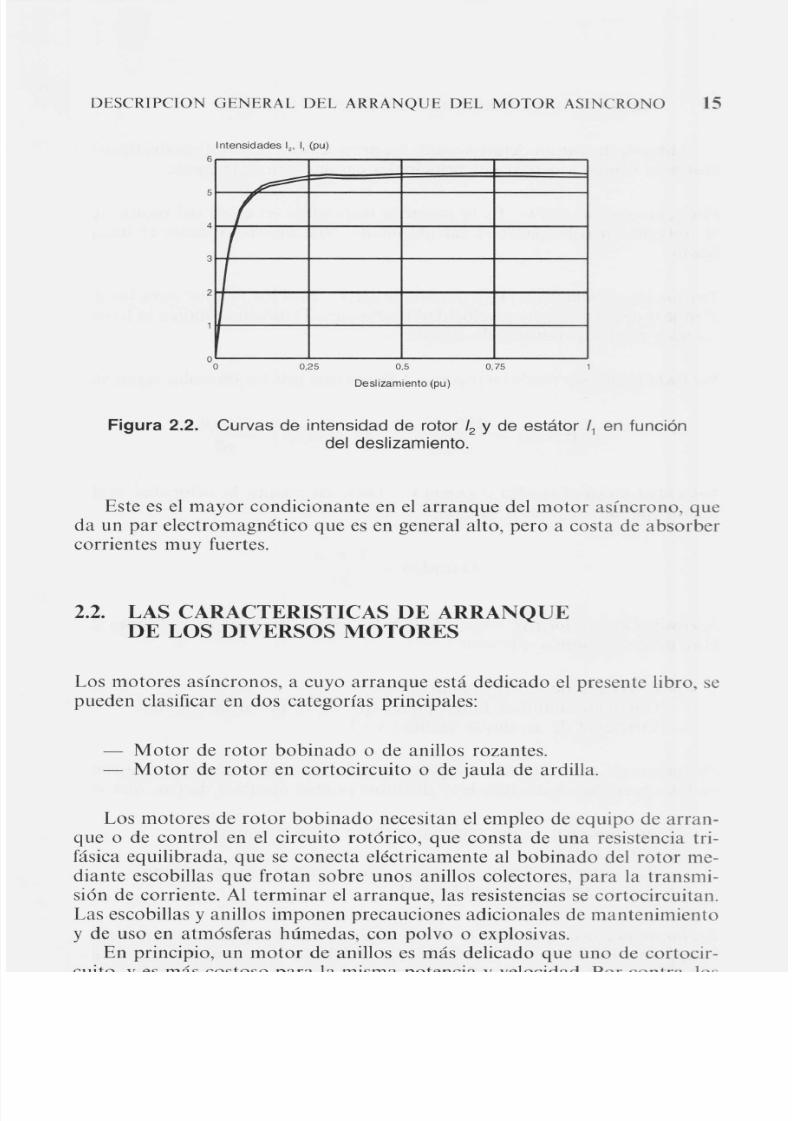
Todo lo que se acaba de indicar se resume en la Figura 2.2, que da lascurvas de intensidad de estátor y de rotar en función de los diferentes
deslizamientos entre s= I (rotar parado) y s=o (rotar girando en vacío sindar par motor).Se ve en estas curvas que en la mayor parte del campo de deslizamientos
las corrientes, expresadas en (pu), tienen valores muy fuertes (con un máxi-mo de 5,5 pu en nuestro caso). En consecuencia, se generan unas pérdidaselevadas por efecto Joule. Así es necesario que el motor arranque en untiempo muy breve para que la energía térmica en la que degeneran las
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 36/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 15
Intensidades 1,. 1 , (pu)
6
¿;:::::::--
(7
oO 0,25 0.5
Deslizamiento (pu)
0,75
Figura 2.2. Curvas de intensidad de rotar ' 2 y de estátor ' 1 en funcióndel deslizamiento.
Este es el mayor condicionan te en el arranque del motor asíncrono, queda un par electromagnético que es en general alto, pero a costa de absorber corrientes muy fuertes.
2.2. LAS CARACTERISTICAS DE ARRANQUEDE LOS DIVERSOS MOTORES
Los motores asíncronos, a cuyo arranque está dedicado el presente libro, se pueden clasificar en dos categorías principales:
Motor de rotor bobinado o de anillos rozantes.Motor de rotor en cortocircuito o de jaula de ardilla.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 37/343
16 ARRANQUE ¡ND STRIAL DE MOTORES ASINCRONOS
Antes de entrar en detalles sobre las prestaciones de los diversos tipos de
motores, vamos a definir sus principales características técnicas.
Potencia nominal (kW). Es la potencia disponible en el eje del motor, quese obtiene sin sobrepasar el calentamiento especificado durante el tiempofijado.
Tensión de alimentación (V) y frecuencia (H~). Son los valores para los queel motor da su potencia y velocidad nominales. También se indica la tensión
ratórica para los motores de anillos.
Velocidad s(ncrona (rad/s) o (r.p.m.). Se obtiene por las fórmulas siguientes:
no ( r. p.m.) Qo (rad/s) 2·7[· no
60
Velocidad nomillal (rad!~) o (r.p.II1.).
menor que la síncrona no (r.p.m.):
Q (rad/s)
Tiene en cuenta la velocidad real n
2 · 7 [ · n
60
Intensidad de estátor (A). Está dada por curvas como las de la Figura 2.2.Hay diversos puntos que son:
Corriente de vacío, cuando s = O.Corriente nominal, la del punto que da la potencia nominal.Corriente de arranque, cuando s= 1.
Par motor (N· m). Sus curvas, para los diferentes tipos de motor, se veránen los apartados siguientes. Hay distintos puntos notables de par, que son:
Par nominal, el del punto que da la potencia nominal.
Par máximo.Par mínimo. Algunos motores dan un acusado par mínimo.Par de arranque, cuando s = l.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 38/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 17
Rendimiento (pu) o (%). Es la relación de la potencia mecánica útil en el
eje, respecto de la eléctrica absorbida en bornas. Evoluciona según la car-ga y suele alcanzar su valor máximo en las inmediaciones del punto no-minal.
Deslizamiento (pu) o (%). Es la desviación de la velocidad mecánica (n,n)
respecto de la velocidad síncrona (no' no) del campo giratorio. Para queaparezca par electromagnético es preciso que el deslizamiento sea diferentea cero. Se define como sigue:
sn o - n
El deslizamiento en motores pequeños tiene valores importantes delorden del 7 - = - 8% en un motor de 1,1 kW, y en los grandes es pequeño,0,3 - = - 0,5% para un motor de 800 kW.
En la Figura 2.3 se dan las características en función de la potencia en eleje para un motor típico.
En la Figura 2.4 están las características típicas de par-deslizamiento (ovelocidad) y de corriente-deslizamiento (o velocidad). Estas curvas son enrégimen permanente. De hecho los constructores cuando las determinanexperimentalmente en sus laboratorios de ensayos mantienen al motor esta- bilizado en el número de puntos suficiente para poder trazar la curva.
El punto de funcionamiento nominal se encuentra en la intersección dela curva de par motor con la curva de par resistente que exige la máquinaaccionada (véase Apartado 2.3.1).
cos ti, 1/1" NIN" Rend. (%)
100
Velocidad
oO 25 50 75 100
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 39/343
18 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Curva par deslizamiento Cu rva de corriente deslizamiento
0,2 0.4 0.6 08
DeslizamIento (pu)
Comente (PU)
6
02 0.4 0.6 0,8
DeslIzamIento (pu)
Par áXlfTlo
r - ...J
"" '- rranque
Sobre r aa no ~ a ¡nesta le
~Plo f u no on m ien t o
) Z o n lineal
~ ' ; . e l adad (p )
Vaao
Par (pu)
3
oO
1,5
0,5
2,5
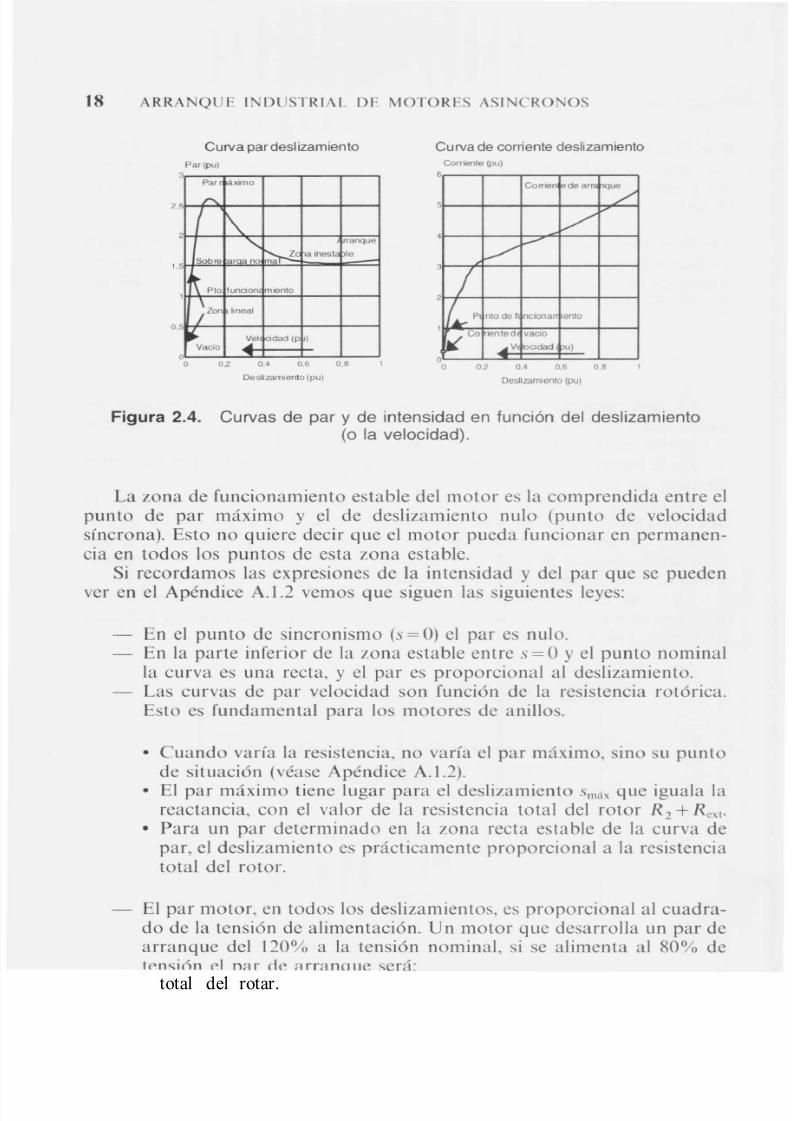
Figura 2.4. Curvas de par y de intensidad en función del deslizamiento
(o la velocidad).
La zona de funcionamiento estable del motor es la comprendida entre el
punto de par máximo y el de deslizamiento nulo (punto de velocidadsíncrona). Esto no quiere decir que el motor pueda funcionar en permanen-cia en todos los puntos de esta zona estable.
Si recordamos las expresiones de la intensidad y del par que se puedenver en el Apéndice A.I.2 vemos que siguen las siguientes leyes:
En el punto de sincronismo (s = O)el par es nulo.En la parte inferior de la zona estable entre s = O Y el punto nominalla curva es una recta, y el par es proporcional al deslizamiento.
Las curvas de par velocidad son funci6n de la resistencia rot6rica.Esto es fundamental para los motores de anillos .
• Cuando varía la resistencia, no varía el par máximo, sino su puntode situaci6n (véase Apéndice A.1.2).
• El par máximo tiene lugar para el deslizamiento Sm'Íx que iguala lareactancia, con el valor de la resistencia total del rotar R2 + Re, ,'
• Para un par determinado en la zona recta estable de la curva de par, el deslizamiento es prácticamente proporcional a la resistenciatotal del rotar.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 40/343
DESCRIPCIO GENERAL DEL ARRANQ E DEL MOTOR ASINCRO O 19
- La corriente absorbida, para todo deslizamiento, es proporcional a la
tensión de alimentación. Si el motor anterior tiene una corriente dearranque del 500% a la tensión nominal, alimentado al 80% detensión la corriente de arranque será:
500% ·0,80 = 400%
Estas dos propiedades son fundamentales a la hora de analizar la mayor parte de los modos de arranque que se verán en este libro.
Otras propiedades de estas curvas son:
- En la zona de trabajo de la curva de par, el deslizamiento varía enforma inversa a la tensión de alimentación.La curva de intensidad tiene un valor no nulo 1 1 /1 ' para el desliza-miento s = O ; ésta es la corriente de vacío y es la causante de la nolinealidad entre corriente y par (o potencia) para bajos deslizamien-tos. En las zonas de alto par esta no linealidad va mejorando.La intensidad es creciente con el deslizamiento, y no presenta un
máximo relativo como la curva de par.
2.2.1. Motor de rotor bobinado o de anillos
Ya hemos indicado en el apartado anterior que este motor tiene la propie-dad fundamental de que sus características se pueden modificar de unaforma importante cambiando la resistencia externa conectada al rotor desdeR ext = O (anillos cortocircuitados) hasta valores elevados. A las curvas obte-nidas con R ex1 = O , las llamaremos características naturales.
Con cada valor que se inserte obtendremos una pareja de curvas de par y de intensidad, de modo que el conjunto de todas ellas forma una familia.
Desde el punto de vista de cálculo es fácil obtener cada curva varian-do el valor de la resistencia insertada en el rotor desde Rz = R z hasta
R z = R z + (Rcxt)máx'
A continuación indicamos la ecuación (véase Apéndice A.1.2) que da el par motor para cada deslizamiento a partir de los valores de diseño de unmotor concreto alimentado a una tensión U Ideterminada:
2CI/I = Cmáx . ( / ) + ( / )S Smáx Smáx S,
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 41/343
20 ARRA QUE INDUSTRIAL DE MOTORES ASI CRONOS
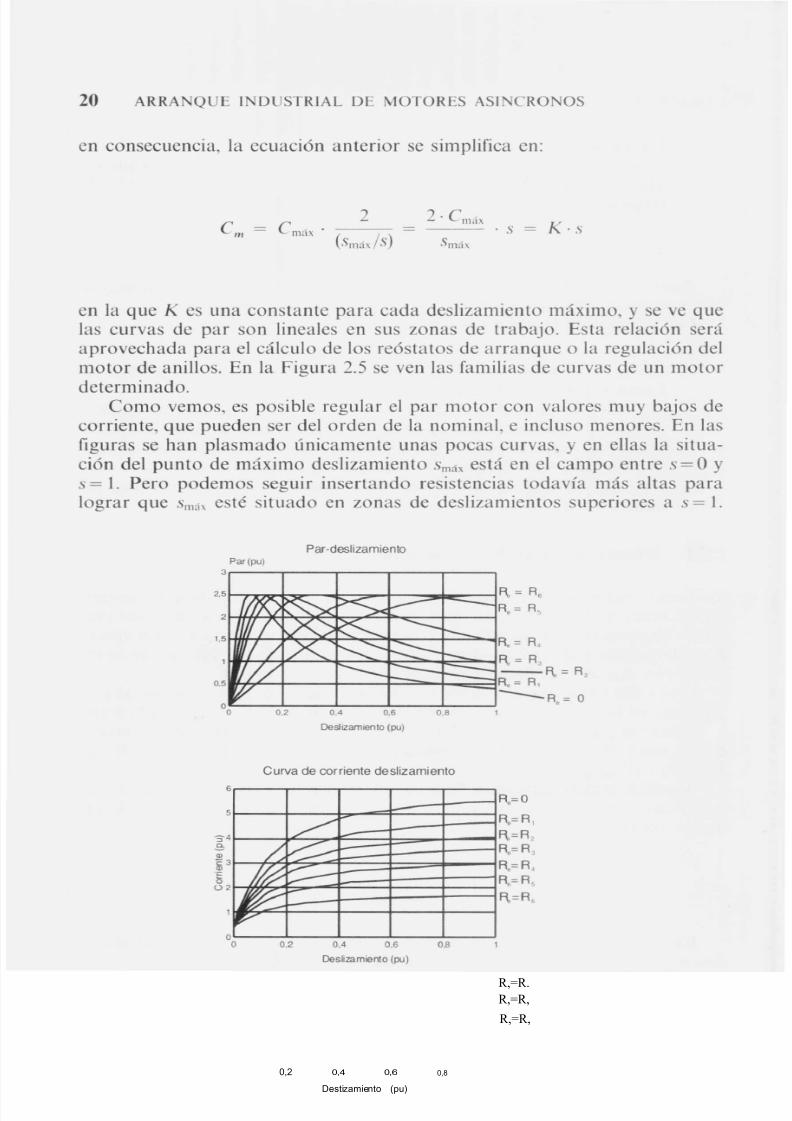
en consecuencia, la ecuación anterior se simplifica en:
Cm C m " x ·2
---·s
Smáx
K ·s
en la que K es una constante para cada deslizamiento máximo, y se ve quelas curvas de par son lineales en sus zonas de trabajo. Esta relación será
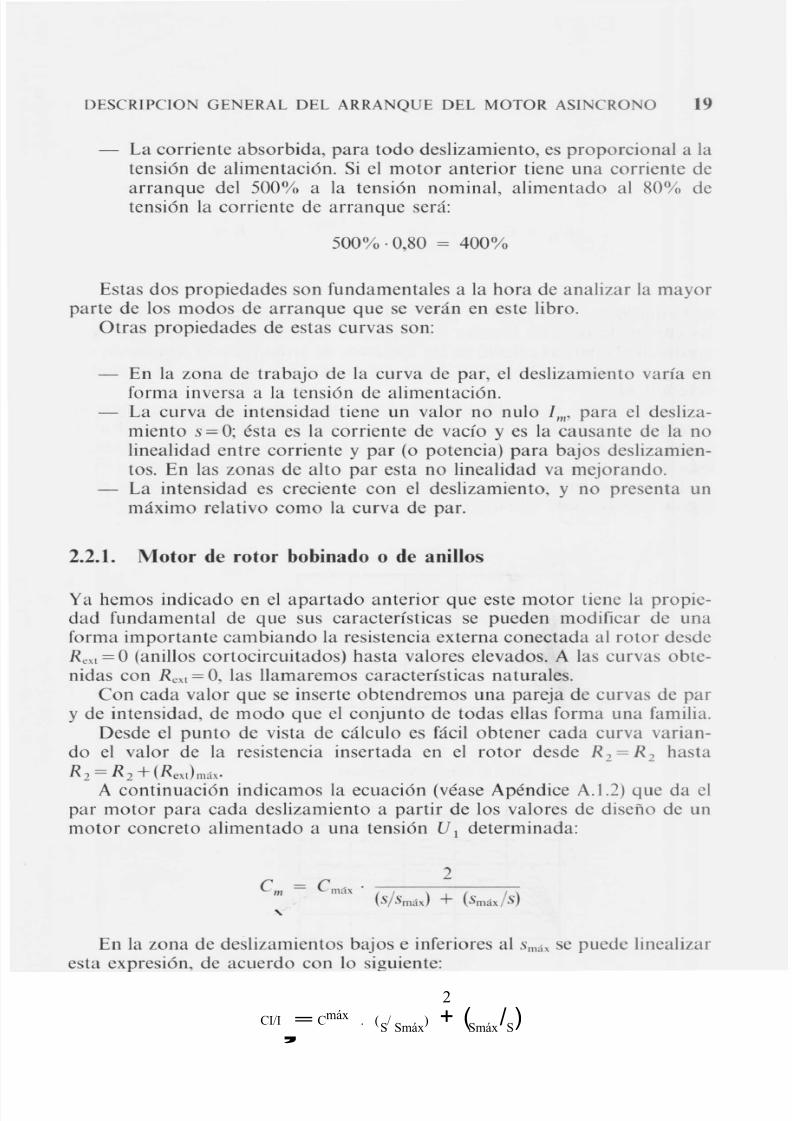
aprovechada para el cálculo de los reóstatos de arranque o la regulación delmotor de anillos. En la Figura 2.5 se ven las familias de curvas de un motor determinado.
Como vemos, es posible regular el par motor con valores muy bajos decorriente, que pueden ser del orden de la nominal, e incluso menores. En lasfiguras se han plasmado únicamente unas pocas curvas, y en ellas la situa-ción del punto de máximo deslizamiento Smáx está en el campo entre s= O ys= l. Pero podemos seguir insertando resistencias todavía más altas paralograr que Sm;Í\ esté situado en zonas de deslizamientos superiores a s = l.
Par-deslizamientoPar(pu)
3
2.5
1,5
0.5
R, = R,
R.= R,
R, = R.
R, = R,--R,= R,
R,= R,--R.= O
0.2 0,4 0,6
Deslozam.",to (pu)
0.8
Curva de corriente deslizamiento
0,2 0,4 0,6
Destizamiento (pu)
0,8
R,=O
R,=R,R,=R,R.=R
R,=R.R,=R,
R,=R,
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 42/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 21
2.2.2. Motor de rotor en cortocircuito
El rotor de este motor tiene su bobinado cerrado sobre sí mismo y sinacceso posible desde el exterior. Por tanto, no existen las posibilidades deregulación de los motores de rotor bobinado o de anillos vistas en elApartado 2.2.1.
Los bobinados rotóricos están constituidos por una o dos jaulas con barras macizas de cobre, aleaciones de cobre, de aluminio o de sus aleacio-nes. Cada ranura tiene una sola barra. Las barras individuales van unidasentre sí, cerrándose el circuito eléctrico, mediante anillos del mismo metalque las barras.
Las barras no están aisladas respecto de la ranura, apareciendo asíciertas corrientes parásitas que dan lugar a pares de la misma naturaleza.
Esta estructura es muy robusta desde el punto de vista mecánico.La ejecución de estos roto res condiciona sus características de par e
intensidad, que por tanto se pueden variar en fase de diseño únicamente.Tenemos tres familias típicas:
Motores de ranuras sencillas no profundas de poca altura.Motores de ranuras profundas.Motores de jaula rotórica doble.
La primera ejecución está destinada, por la mayoría de fabricantes, a losmotores pequeños de sus gamas y da unas prestaciones suficientes de par
pero a costa de intensidades altas durante el arranque.En los motores de ranuras profundas se favorece el fenómeno de despla-
zamiento de corriente, que es muy conveniente para las prestaciones delmotor durante el arranque, ya que tiene los siguientes efectos:
Con altos deslizamientos y, por tanto, frecuencias elevadas en elcircuito del rotor y cercanas a la nominal, la corriente en la barra delrotor se concentra en la parte superior de modo que su resistenciaaumenta y su reactancia disminuye (véase Apéndice A.1.3.2). Estoconlleva:
• Limitación de la corriente durante el arranque.• Aumento del par motor, pues la corriente rotórica está menos
desfasada.Al acelerar el motor y entrar en la zona de bajos deslizamientos confrecuencias de rotor bajas, desaparece el desplazamiento de corrien-tes y la distribución de la misma es más regular, con 10 que:
• La resistencia rotórica es menor y el deslizamiento disminuye.• El bajo deslizamiento limita la intensidad.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 43/343
22 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
y material de cada una de las jaulas, con lo cual el número de grados de
libertad para el diseñador del motor es tal, que se pueden tener variacionesimportantes en las características de:
Par-deslizamiento.1ntensidad-deslizamiento.
y adaptarlas a cada aplicación.
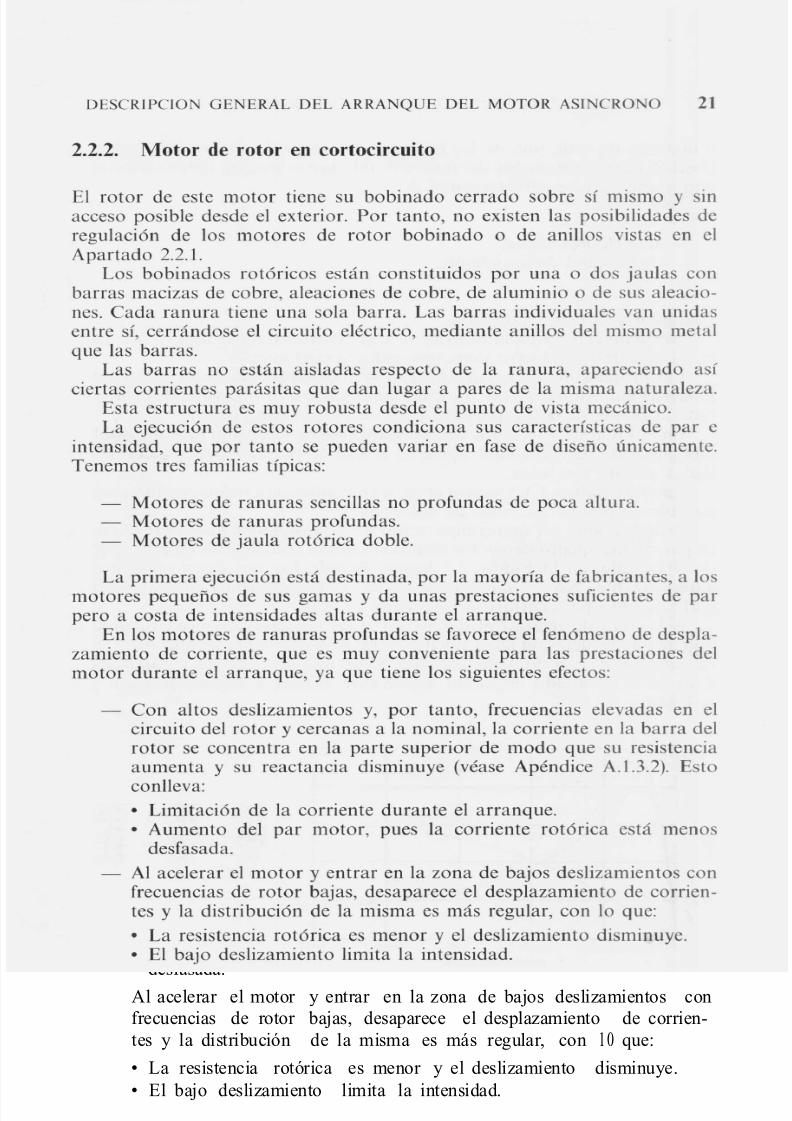
Normalmente la jaula externa se elige de resistividad alta, y por estar más cerca del entrehierro tiene una inductividad inferior.Las propiedades de la jaula interna son opuestas, baja resistividad y alta
inductividad. Ambas jaulas contribuyen al par y a la corriente absorbida entoda la banda de deslizamientos, pero en proporción distinta.
En la Figura 2.6 tenemos tres posibilidades de ejecución de jaula doble yuna curva de par velocidad típica en la que se ven las aportaciones de las
jaulas interna y externa.En el Apéndice A.1.3 vemos el circuito equivalente recomendado para el
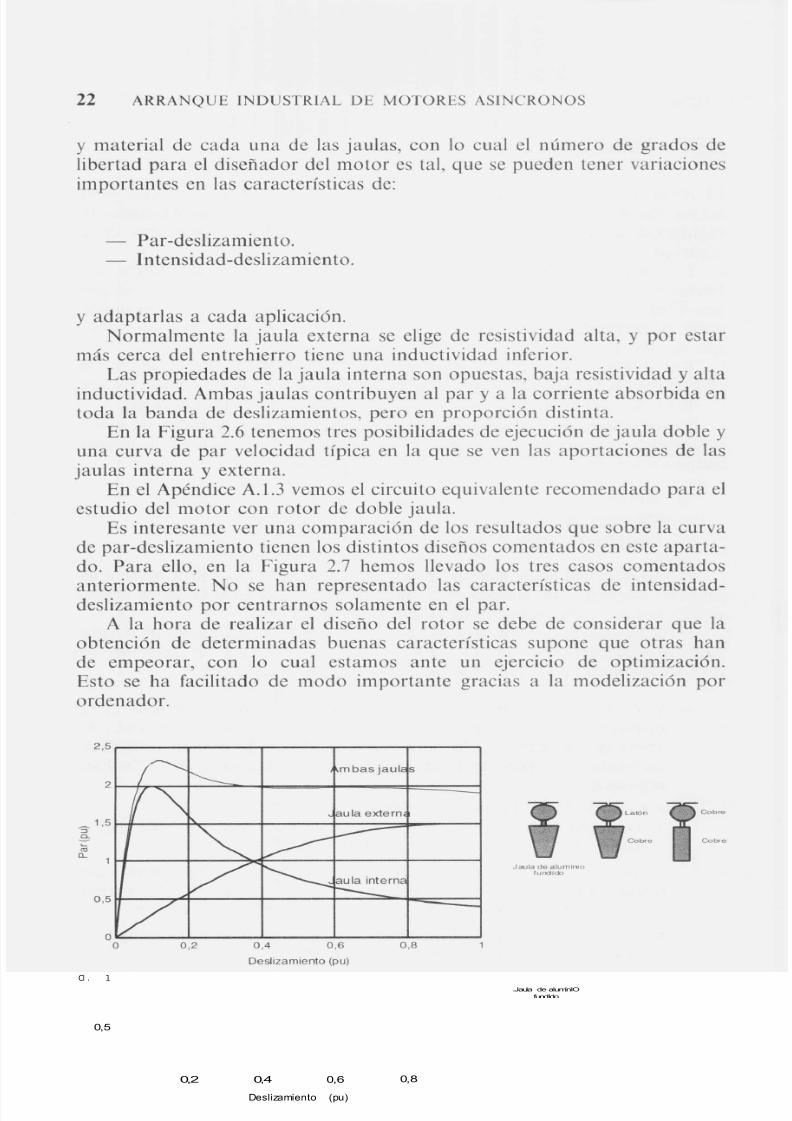
estudio del motor con rotor de doble jaula.Es interesante ver una comparación de los resultados que sobre la curvade par-deslizamiento tienen los distintos diseños comentados en este aparta-do. Para ello, en la Figura 2.7 hemos llevado los tres casos comentadosanteriormente. No se han representado las características de intensidad-deslizamiento por centrarnos solamente en el par.
A la hora de realizar el diseño del rotor se debe de considerar que laobtención de determinadas buenas características supone que otras hande empeorar, con lo cual estamos ante un ejercicio de optimización.
Esto se ha facilitado de modo importante gracias a la modelización por ordenador.
mbas jaul s
Co~.
Q " " "V C o ~ ..Jaula de aluminIO
fundIdo
0,80,60,40,2
2
0,5
S' 1,5
S;¡¡
Cl . 1
2,5
Deslizamiento (pu)
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 44/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 23
Par(pu)
3,5
3
2,5
2
1,5
0,5
oO 0,2 0,4 0,6 0,8
Deslizamiento (pu)
Figura 2.7. Comparación de las curvas de par-deslizamiento para tres diseñosde rotar diferentes.
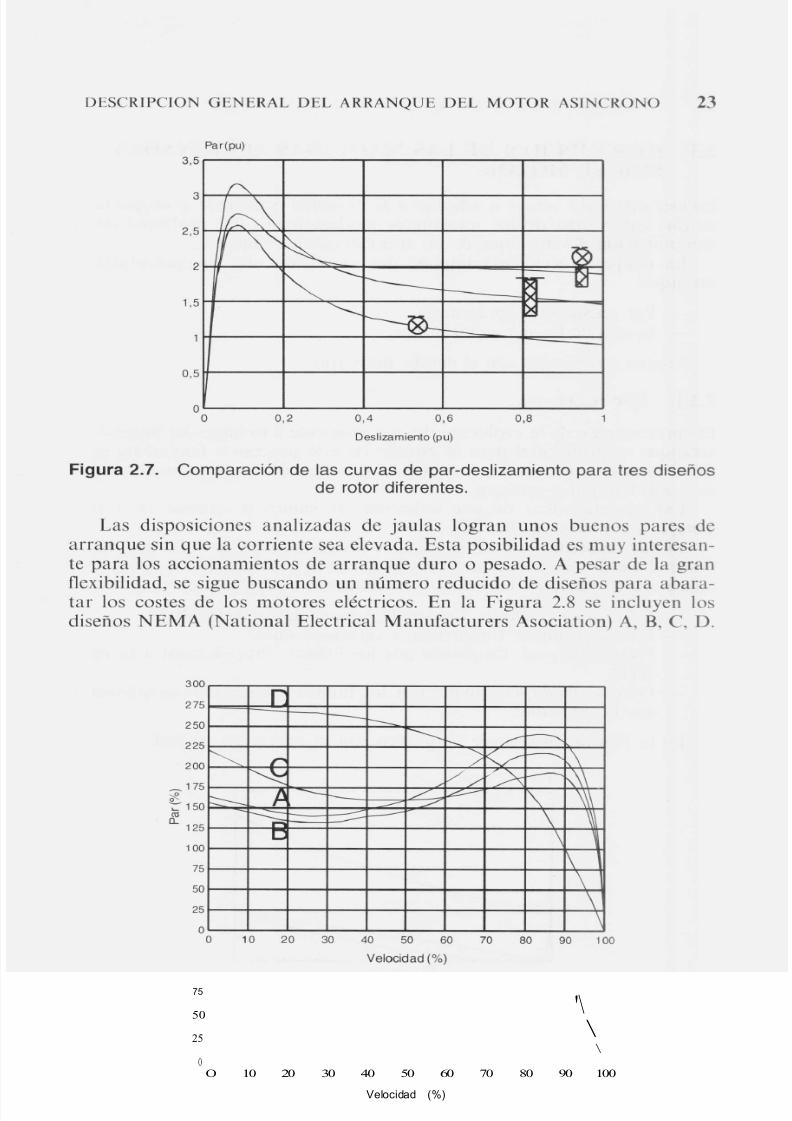
Las disposiciones analizadas de jaulas logran unos buenos pares dearranque sin que la corriente sea elevada. Esta posibilidad es muy interesan-te para los accionamientos de arranque duro o pesado. A pesar de la granflexibilidad, se sigue buscando un número reducido de diseños para abara-tar los costes de los motores eléctricos. En la Figura 2.8 se incluyen losdiseños NEMA (National Electrical Manufacturers Asociation) A, B, e, D.
r -f---.-
~t--. /" - - - - - . . . . . .
r = = : : : : : : : ,. ::1'--./ - - - - - . . . . . .
~ V/ ~ \\1 : : - - - . . . - t • . . • . . . . . . /' r : :z : : : : : : '
\ \ \ \-::::: :.- r.-- \ \~
e \
'\\
\
50
25
OO 10 20 30 40 50 60 70 80 90 100
Velocidad (%)
300
275
250
100
75
225
200
~ 175
' "::- 150g :
125
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 45/343
24 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
2.3. DESCRIPCION DE LAS MAQUI AS ACCIO ADAS
POR EL MOTOR
En este apartado vamos a estudiar a la máquina accionada o acoplada almotor, como otro de los integrantes fundamentales del problema de ladeterminación del arranque de un accionamiento completo.
La máquina accionada impone dos condicionantes fundamentales alarranque:
- Par resistente o antagonista.- Inercia de las masas giratorias.
Vamos a revisarlas con el detalle necesario.
2.3.1. Par resistente
El conocimiento de la evolución del par resistente a lo largo del proceso dearranque es primordial para el estudio de este proceso y finalmente paradeterminar el punto de funcionamiento, que es el que da el régimen estableen velocidad, par y potencia.
Las características de par resistente las vamos a estudiar de formageneral agrupadas por familias.El par resistente está motivado por las resistencias pasivas, que vistas
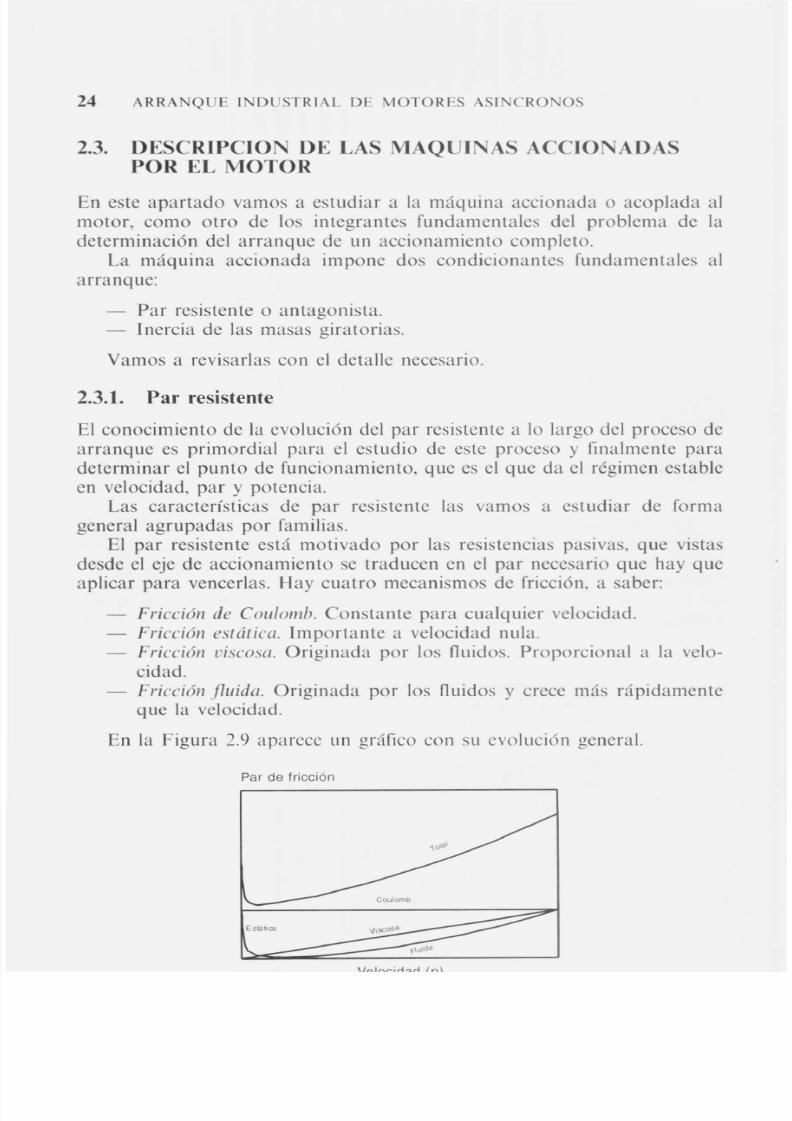
desde el eje de accionamiento se traducen en el par necesario que hay queaplicar para vencerlas. Hay cuatro mecanismos de fricción, a saber:
Fricción de Coulol11b. Constante para cualquier velocidad.Fricción estática. Importante a velocidad nula.Fricción viscosa. Originada por los fluidos. Proporcional a la velo-cidad.Fricción fluida. Originada por los fluidos y crece más rápidamenteque la velocidad.
En la Figura 2.9 aparece un gráfico con su evolución general.
Par de fricción
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 46/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 25
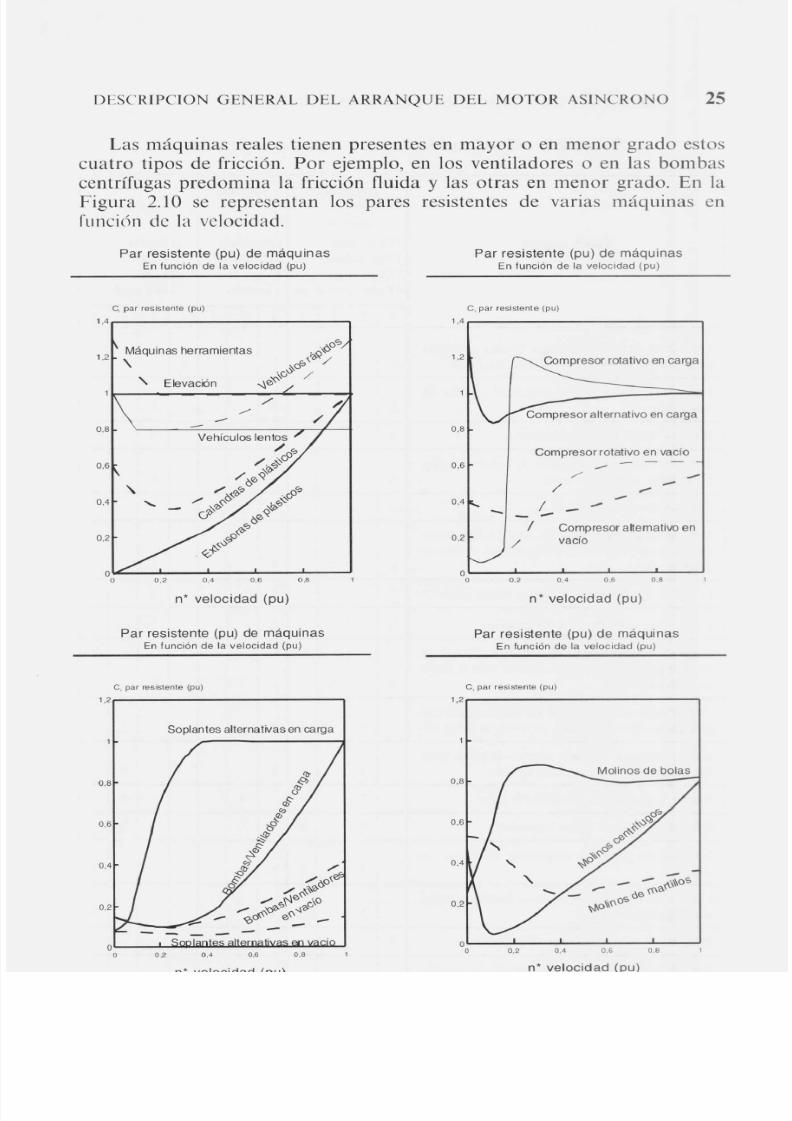
Las máquinas reales tienen presentes en mayor o en menor grado estos
cuatro tipos de fricción. Por ejemplo, en los ventiladores o en las bombascentrífugas predomina la fricción fluida y las otras en menor grado. En laFigura 2.10 se representan los pares resistentes de varias máquinas enfunción de la velocidad.
Par resistente (pu) de máquinasEn función de la velocidad (pu)
Par resistente (pu) de máquinasEn función de la velocidad (pu)
e, par resistente (pu)
1.4
e, par resistente (pul
1,4
Máquinas herramientas1,2 \
'\ Elevación
0.80.6
Compresor attemativo en
vacío
0,4
. • . • . .
Compresor rotativo en carga
Compresor rotativo en vacío
0,2°°
0,2
1,2
0,4
0,6
0.8
0,80,604
0,2
'\
0.4 .•••••
n* velocidad (pu) n* velocidad (pu)
Par resistente (pu) de máquinasEn función de la velocidad (pu)
Par resistente (pu) de máquinasEn función de la velocidad (pu)
e, par resistente (pu)
1,2
e, par resistente (pu)
1.2
Soplantes alternativas en carga
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 47/343
26 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Tabla 2.1. Clasificación de las máquinas accionadas
I rr e gu la r id a d F r e cu en cia
d e p a r d e I n e r c iar e s i s t e n t e a r r a nq ue s
T i pos de m áq u i n a s I P o co o sc il a n te 1 O c a s io na le s I P e qu eñ a
2 M uy os r i l a n l e 2 F r e c u e n t e s 2 ~ I ed i a
3 G o lp e s d e p a r 3 M u y 3 G r a n d e~ F u e r te s g o lp e s d e p a r f r ec u e n t e s 4 ~ l uy g r a nd e
I 2 3 4 I 2 3 I 2 3 4
V e n t il a d o r e s d e p o t e n c ia p e q u e ñ a . b o m b a s c e n t rí fu g a s ,c i n t a s t r a n s p o r t a d o r a s l i g e r a s , e s c a l e r a s m e c á n i c a s X X X
V e n t il a d o r e s , e 1 e v a d o r e s , t u rb o c o m p r e s o re s , c i n ta s a l i-
m en t a do r a s X X X
M áqu i n a s t e x t i l e s l i g e r a s , m e z c l a d o r a s X X X
P r e n s a s r o t a t iv a s . a c c i o n a m i e n t o s d e e j e s d e m { ¡ q u i n a s
h e r r a m i e n t a s , m á q u i n a s d e p a p e l X X X
V e h í c u lo s d e t ra n s p o r te d e p e r s o n a s X X X
M e z c l a d o r a s h o rm i g ó n , t a m b o r e s s e c a d o . b om b a s a l te r -
n a t iv a s , c o m p r e s o re s d e b a j a i rr e g u la r id a d . m o l in o s d e
c em en t o , s i e r r a s X X X X
L a \ a d o r a s . e j e s d e b a r c o s , ew u s o r a s . h o r n o s g i r a t o r io s X X X X
C a m i n o s d e r o d i ll o s d e t r e n e s d e l a m i n a c i ó n X X X X
M ec a n i sm o s d e e l e v a c i ó n y g i r o e n g r ú a s , m a n i p u l a d o r e s .
t r e n e s d e l a m i n a c i ó n r e v e r s i b le s , l ín e a s d e c o r t e d e c h a p a ,
b o b in a d o r a s d e c a b le X X X X
A s t i ll a d o r a s d e m a d e r a , b om b a s a l t e r n a t i v a s d e a l t a i r r c -
g u l a r i d a d , m o l i n o s d e m a r t il lo s . a c c i o n a d o r e s d e v á l v u l a s X X X X
C i li n d r o s d e s e c a d o y a l i s a d o . c a l a n d r a s d e p a p e l . m a r t i -
l l o s , l a m i n a d o r e s d e g om a . s i e r r a s c i r c u l a r e s X X X X
P r e n s a s , m e c a n i s m o s d e t r a n s l a c i ó n d e g r ú a s X X X X
B ob i n a d o r a s d e p a p e l . s i e r r a s t r a n s v e r s a l e s X X X X
M a c h a c a d o r a s d e p i e d ra , c o m p r e s o rc s a l te r n a t iv o s s invo l a n t e X X X X
C a m i n o s d e r o d il lo s p e s a d o s . t re n e s h/oo/llilllj-.I/ahhiIlY.
c e n t r i fu g a d o r a s d e a L ú c a r X X X X
M á q u i n a s d e e n v a s a r . m á q u i n a s d e em b o t e l la r X X X
A c c i o n a m i e n to s d e o o s ic i ó n d e m á u i n a h c r ra m i e n ¡¡ ¡ .
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 48/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 27
En algunas máquinas el par resistente es menor con la máquina en vacío
que en carga; se emplea esta propiedad para aligerar la fase del arranqueque puede ser problemática.
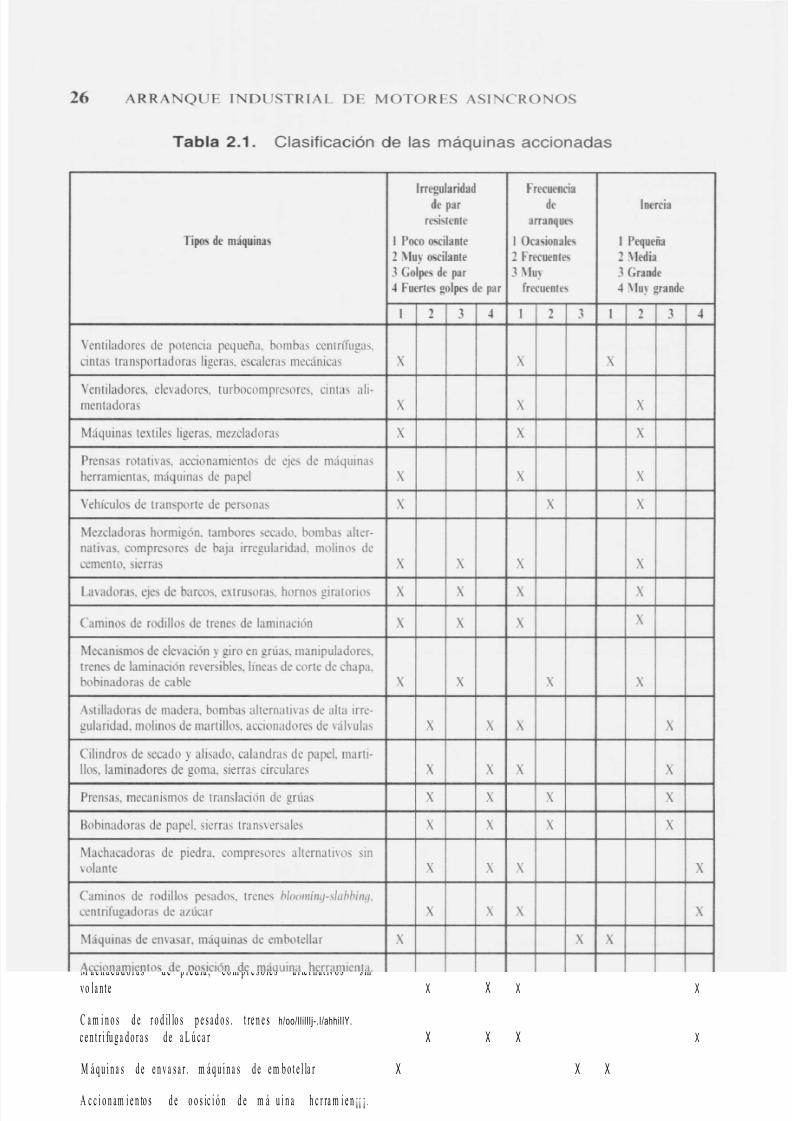
Además de las características de par resistente que se acaban de ver, es preciso referimos a otras que han sido sumarizadas en la Tabla 2.1, en la página 26. Estas propiedades son:
Irregularidad del par resistente. Son las oscilaciones del par resistente refe- ,~" ~ridas al par medio. Esto sucede en las máquinas alternativas. Estas máqui-nas son fuentes potenciales de problemas de resonancia mecánica en la líneade transmisión de potencia mecánica entre motor y máquina accionada.
Frecuencia de arranques. Hay motores con una frecuencia alta de arran-ques por unidad de tiempo, por lo que las solicitaciones propias de esta fasese agravan por acumularse. Estos motores han de estudiarse de formaespecial.
Inercia. Hemos visto en la ecuación dinámica general del arranque (Apar- -
tado 2.1.1) que la inercia condiciona de un modo importante el arran-que. En el Apartado 2.3.2 estudiaremos en detalle su definición y sus conse-cuencIas.
Vamos a dar datos de algunas máquinas accionadas más usuales.
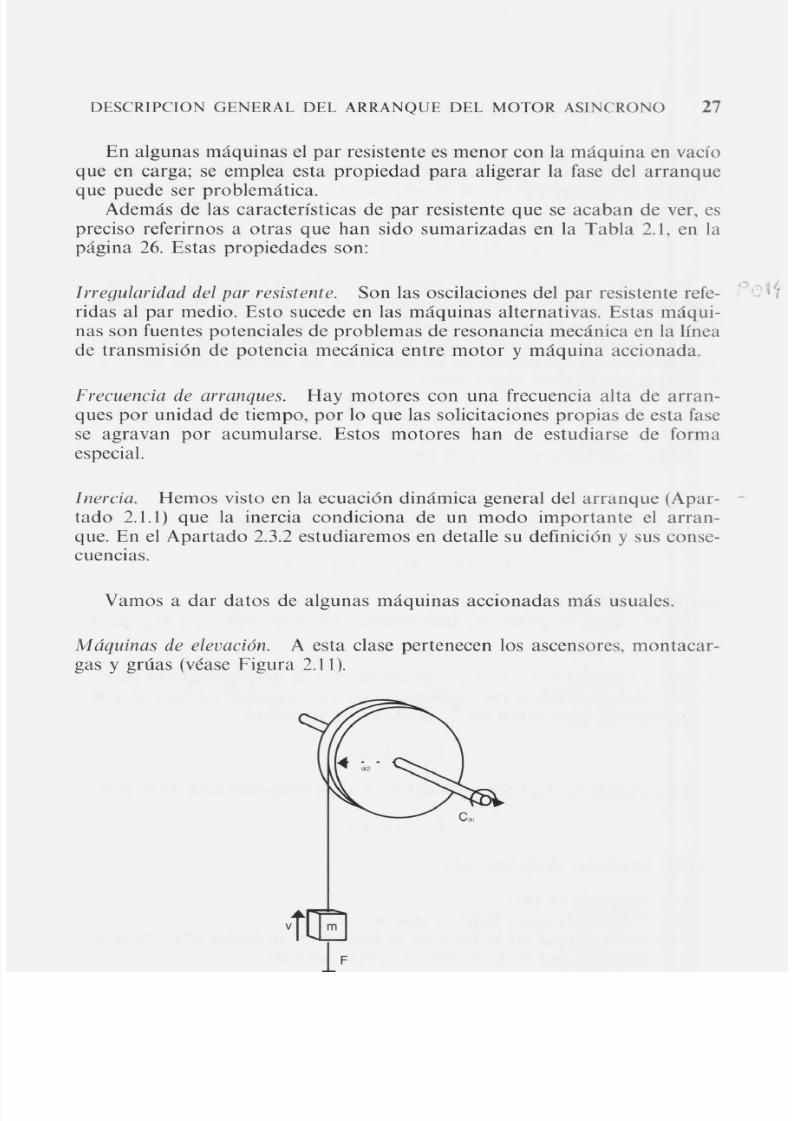
M áquinas de elevación. A esta clase pertenecen los ascensores, montacar-gas y grúas (véase Figura 2.11).

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 49/343
28 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
El par resistente de estas máquinas es prácticamente constante, excep-
tuando el par estático de despegue. Tienen un tambor, polea o disco paraconvertir el movimiento lineal en rotaciona1.
Se cumplen las siguientes ecuaciones de acuerdo con la figura:
v = n·d/2 CI' = 111' g . d /2
En el eje del motor el par resistente es distinto, pues el reductor develocidad lo modifica proporcionalmente, pero su magnitud permanececonstante a lo largo de toda la banda de velocidad.
En ascensores y en montacargas existe un contrapeso de mcp que trata decompensar, para la mayoría de los regímenes de carga, la carga útil m y lade la caja l11u' Se suele elegir como:
El par resistente será en este caso:
La inercia que el ascensor añade a la del motor será:
referida al eje del tambor o polea.En los casos de grúas hay que eliminar los valores de ma y mcp que no
existen.
Bombas y ventiladores. Con excepción del par de despegue (oscila entre el
5 -'- 20% del nominal), el par resistente que estas máquinas oponen al motor es una función parabólica de 2.° grado de la velocidad:
C I' = k·n1
La potencia en régimen nominal de ambas máquinas está dada por:
P = Q. P/fl
con las siguientes designaciones:
P =Potencia en (W).Q = Caudal de agua, Ouido y gas (m3/s).P =Presión total en la boca de la bomba o ventilador (Pa = N/m1
).
fl = Rendimiento de la bomba o ventilador (pu).

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 50/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 29
Bombas. p = h· g . n
h = Altura total que genera la bomba (m. col de l1uido), con pérdidas decarga.
g = Aceleración de la gravedad = 9,81 m/s2•
n = Densidad del l1uido (kg/m3); agua = 1.000 kg/m3
.
Ventiladores. p =g . h
h = Presión total = estática + dinámica (mm. col de agua).
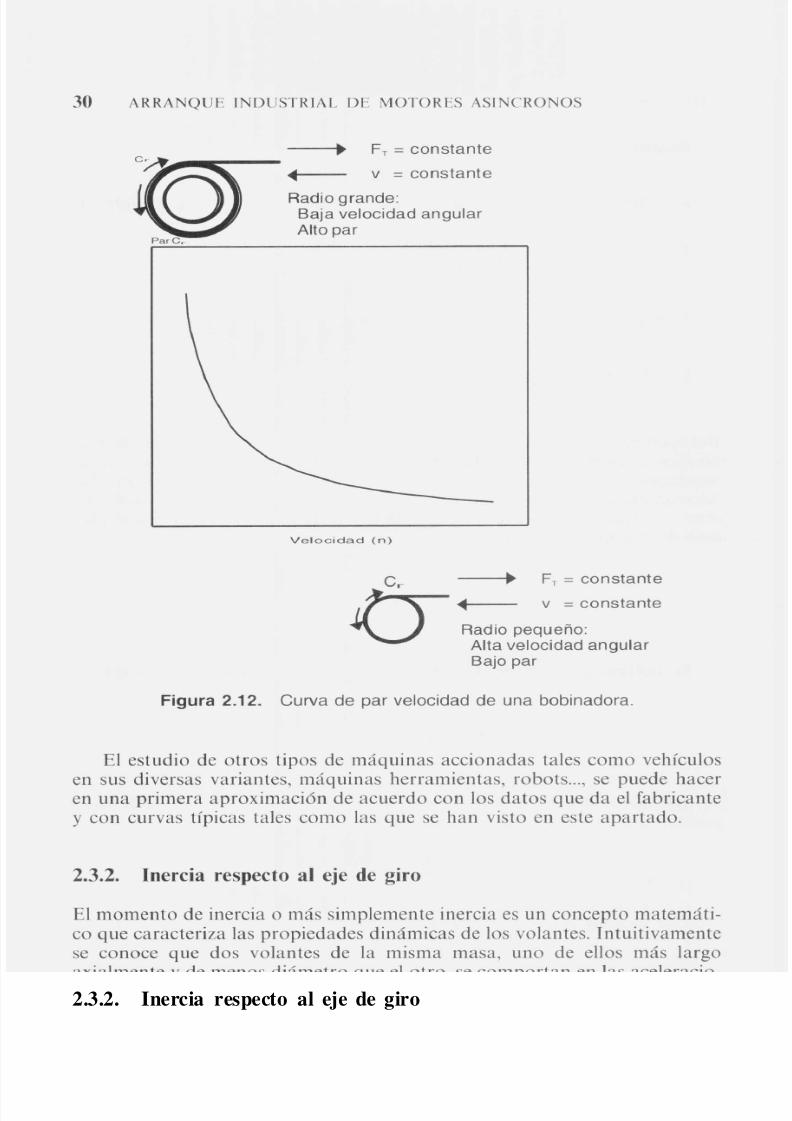
Bobinadoras o arrolladoras. Son máquinas muy diversas, pero todas res- ponden a un patrón general, por el cual el diámetro de la bobina creceregularmente tensado con una fuerza constante, y su velocidad angular decrece, auuque la lineal de arrollado permanece igual. Lo que se acaba decitar corresponde al proceso de arrollado y sucede inversamente en el pro-ceso de desenrollado. En estas máquinas se cumple:
Cr F·D/2 v/(D/2) 2· viD
Si multiplicamos miembro a miembro estas ecuaciones tenemos que:
Cr·Q F·v Constante
ya que la tensión y velocidad lineal de arrollado son fijas durante cada proceso. En estas fórmulas tenemos que:
D = Diámetro de la bobina en un instante dado.F = Tensión de arrollado.v = Velocidad lineal de arrollado.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 51/343
30 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
<9}C/t ~ FT = constante
O < i I v = constante
Radio grande:
Baja velocidad angular
Alto par ParCo
Velocidad (n)
c , . . • FT = constante
IK-o l l v = constante
~ Radio pequeño: Alta velocidad angular
Bajo par
Figura 2.12. Curva de par velocidad de una bobinadora.
El estudio de otros tipos de máquinas accionadas tales como vehículosen sus diversas variantes, máquinas herramientas, robots ..., se puede hacer en una primera aproximación de acuerdo con los datos que da el fabricantey con curvas típicas tales como las que se han visto en este apartado.
2.3.2. Inercia respecto al eje de giro

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 52/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 31
Eje de' giro
Figura 2.13. Determinación de la inercia de un sólido giratorio.
De acuerdo con la Figura 2.13, el cuerpo gira alrededor de su eje convelocidad Q. Al ser el cuerpo rígido, todos sus elementos de masa dm semueven con la misma velocidad angular. En cada elemento de masa secumple la ecuaci6n del par acelerador:
dC m = r·dF m = r·dm·dv/dt = r·dm·r·dQ/dt = r 2·dm·dQ/dt
El par total lo obtendremos por integraci6n extendida a todo el volu-men del s6lido:
C m = J dC m = J r 2. dm· dQ/dt = dQ/dt J r 2. dm = J. dQ/dt
Denominamos inercia másica o momento de inercia de un cuerpo gira-torio a la integral:
f
m
J = r 2. dm
o
La unidad de inercia en el sistema Sl es el kg· m2. Hay otras designacio-nes cuya equivalencia es la siguiente:
PD2 (española, francesa)
G02
(alemana)W r 2 (anglosajona)
J (kg· m2) = PD2/4· g con P02 en kg· m2
J (kg· m2
) = GD2
/4· g con GD2
en kg· m2
J (kg· m2) =Wr 2/g con Wr 2 en lb· ft2

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 53/343
Rueda arrastrada
32 ARRANQUE INDUSTRIAL DE MOTORES ASI CRONOS
to entre engranaje motor y engranaje conducido. En la Figura 2.14 vemos la
disposición esquemática.En el punto de contacto se cumple el equilibrio de fuerzas f, =f2' y
podemos poner las ecuaciones de pares en el piñón y en la rueda arrastrada:
Cm ! - 1",1 , = J¡·d0.¡/dl
1"2..r~ =J 2· d0.2/dl
También se cumple que la velocidad lineal es idéntica en el punto de
contacto:
Eliminando en las ecuaciones anteriores fl ' .f~ y 0.2 resulta que:
Se ve que la inercia J 2 en el eje de velocidad 0.2 se añade a la inercia J,
en el eje de velocidad Ql' pero corregida por la relación:
i= relación de transmisión del sistema de cambio de velocidad usado.Se define la inercia equivalente referida al eje 1, como:
1 , = 1 ,

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 54/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 33
2.4. CALCULO DE LAS MAG ITUDES DEL ARRA QUE
En este apartado vamos a desarrollar, con el detalle necesario, los métodosdc cálculo de las principales magnitudes que cuantifican el proceso dearranque.
2.4.1. Tiempo de arranque
En el Apartado 2.1.1 hemos indicado la ecuación fundamental que rige el proceso; ahora por sencillez adoptaremos el caso más frecuente de iner-cia J constante:
La integración de esta ecuación nos da el tiempo de arranque:
f n=nN J
t a = ---·do.
n=Q C m - C r
En esta integral definida, los límites son respectivamente la . velocidadinicial al comienzo del proceso o . = O, Y la final que normalmente es lanominal del punto de funcionamiento o . =o .N.
Esta integral no es en sí de solución difícil; sin embargo, el mayor problema es que las funciones Cm(o.) y Cr(o.) son de forma complicada.
En los manuales de electrotecnia tradicional se indicaban métodos deintegración gráfica para los casos en los que las funciones de par fuerancomplicadas; actualmente es preferible acudir a métodos de integración por intervalos resueltos con hoja de cálculo.
En el Ejemplo 2.1 que sigue explicamos el método de una manera di-recta.
Para ello dividimos la banda de velocidad en intervalos iguales. Elnúmero de intervalos será tanto mayor cuanto más variables sean las curvasCm(o.) y Cr(o.). Nos hemos de asegurar con esta división que dentro de cada
intervalo la variación de las funciones sea pequeña. En los casos normalesun número de intervalos de 10 como en el ejemplo que presentamos estotalmente suficiente.
Leemos en el centro de cada intervalo los valores de Cm(o.) y Cr(o.). Ladiferencia Ca = C m - Cr es el llamado par acelerador. Si dividimos la inerciatotal J por el par acelerador de cada intervalo, y la multiplicamos por elinr-r m nt" rl \/ l '\l"'it1".lt1 "ht nrlr 1'Ylf"\C inrrp1'Ylpntf'\ rl ti mnf'\ mnl "::'IrlA
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 55/343
34 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
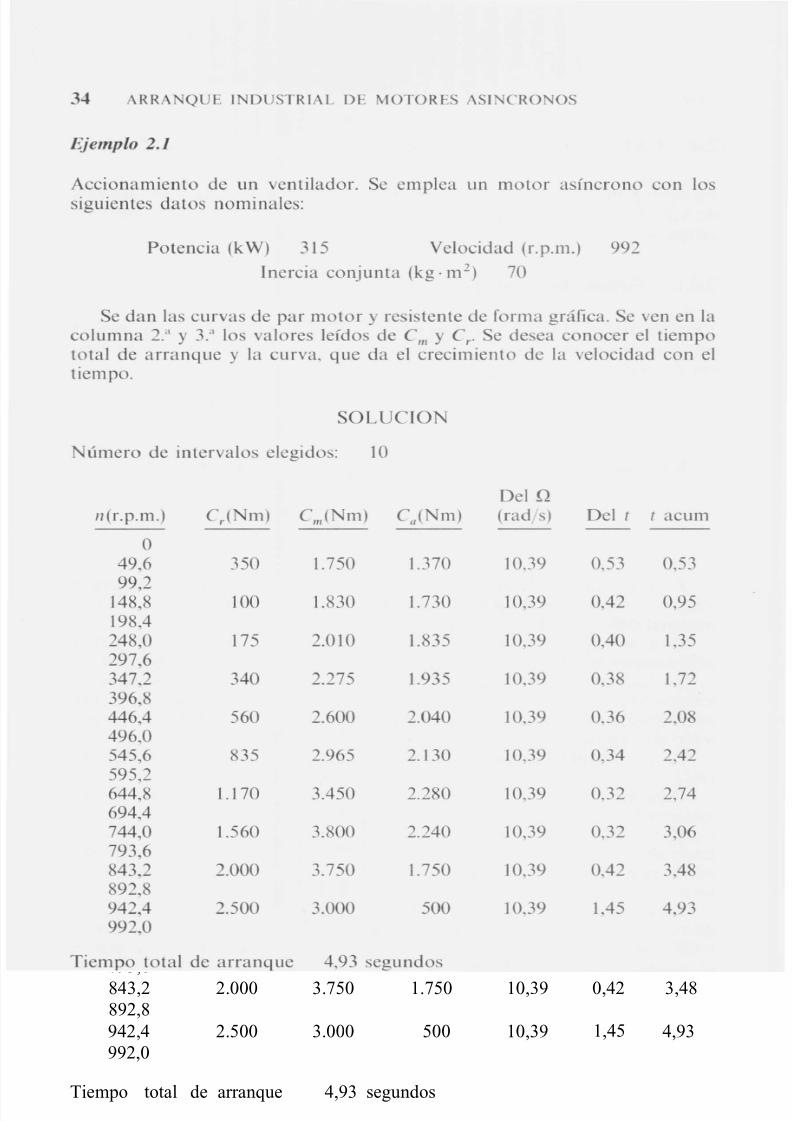
Ejemplo 2.1
Accionamiento de un ventilador. Se emplea un motor asíncrono con lossiguientes datos nominales:
Potencia (kW) 315 Velocidad (r.p.m.) 992
Inercia conjunta (kg· m2) 70
Se dan las curvas de par motor y resistente de forma gráfica. Se ven en la
columna 2." y 3." los valores leídos de Cm Y C r .
Se desea conocer el tiempototal de arranque y la curva, que da el crecimiento de la velocidad con eltiempo.
SOLUCJON
Número de intervalos elegidos: lO
Del Q
n(r.p.m.) Cr(Nm) Cm(Nm) ClI(Nm) (rad s) Del t t acumO
49,6 350 1.750 1.370 10,39 0,53 0,5399,2
148,8 100 1.830 1.730 10,39 0,42 0,95198,4248,0 175 2.010 1.835 10,39 0,40 1,35297,6347,2 340 2.275 1.935 10,39 0,38 1,72396,8446,4 560 2.600 2.040 10,39 0,36 2,08496,0545,6 835 2.965 2.130 10,39 0,34 2,42595,2644,8 1.170 3.450 2.280 10,39 0,32 2,74694,4744,0 1.560 3.800 2.240 10,39 0,32 3,06793,6843,2 2.000 3.750 1.750 10,39 0,42 3,48892,8942,4 2.500 3.000 500 10,39 1,45 4,93992,0
Tiempo total de arranque 4,93 segundos

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 56/343
DESCRIPCION GENERAL DEL ARRA QUE DEL MOTOR ASINCRONO 35
Velocidad (r.p.m.)1.000
750
500
250
oo
liempo(s)
Figura 2.15. Evolución de la velocidad durante el arranque.
La integración de la ecuaClOn que da el tiempo de arranque tiene uncaso particular cuando el par motor tiene la expresión, como se ha visto enel Apartado 2.2.1:
2Cmáx' -------
(S /Smá.) + (smáxls)
el par resistente para este caso particular se toma: C r = O .
La integración directa da para el tiempo de arranque:
Si definimos la constante de tiempo de arranque como:
que se interpreta como el tiempo necesario para arrancar, aplicando duran-te todo el tiempo el par máximo C m áx, entonces el tiempo de arranque será:
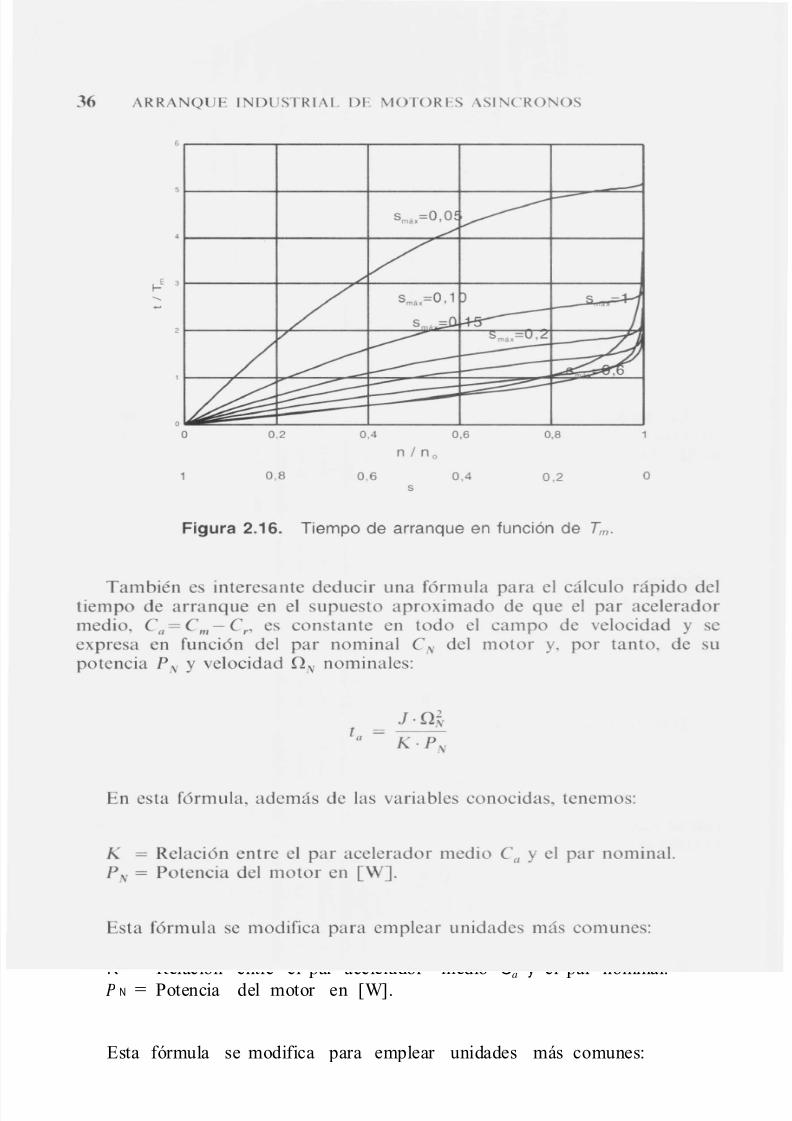
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 57/343
36 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
0,8 0,6s
0,4 0,2 °
Figura 2.16. Tiempo de arranque en función de Tm .
También es interesante deducir una fórmula para el cálculo rápido deltiempo de arranque en el supuesto aproximado de que el par acelerador medio, Ca = C m - Cr , es constante en todo el campo de velocidad y seexpresa en función del par nominal e N del motor y, por tanto, de su potencia P N Y velocidad ºN nominales:
En esta fórmula, además de las variables conocidas, tenemos:
K = Relación entre el par acelerador medio Ca y el par nominal.P N = Potencia del motor en [W].
Esta fórmula se modifica para emplear unidades más comunes:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 58/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 37
En la que:
P N = Potencia del motor en [k W].nN = Velocidad del motor en [r.p. m.].
2.4.2. La energía disipada en rotor y estátor
Se realiza por integración de las pérdidas R12 en rotar y en estátor. Lasdemás pérdidas se deberían de tener en cuenta en la integración, pero sedesprecian por las siguientes razones:
- Las pérdidas RT2 aumentan mucho en la fase de arranque por ser lascorrientes muy altas.
- Su variación temporal también es importante.- Las otras pérdidas surgen en otros componentes del motor, y en
cambio las RT2 están exclusivamente ceñidas a los bobinados derotar y estátor, por lo que su concentración y sus efectos (calenta-mientos y dilataciones) son muy importantes, y además estos compo-nentes son los más delicados del motor y los más expuestos a los
problemas de calentamiento.
La energía perdida en el rotor durante el proceso completo de arran-que es:
it
f '2 '23· 12 ·R2 ·dt
t·1
en la que:
ti = Instante inicial considerado.tI = Instante final considerado.
Según el Apéndice A.1.5, las pérdidas de Joule en el rotor se puedenexpresar a través de la potencia electromagnética y el deslizamiento:
Conocemos también que J. dO'¡dt =C'"- C r , luego tendremos que secumple:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 59/343
38 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Sustituyendo todos estos valores en la integral que da W r y simplifican-do, obtenemos:
f S=S¡ s· ds
Wr =º02.j -----
s=sf (1-Cr/C m)
Esta integral se resuelve en la mayor parte de los casos por el métodonumérico semejante al del Ejemplo 2.1. Para ello habrá de conocer laevolución de las funciones C r Y Cm ' En el caso de un arranque completo, loslímites son s¡=l, sf~O.
Vamos a ver el valor de esta integral de energía disipada en el rotar durante el arranque para el caso particular en el que C r es nulo o muy
pequeño, cualquiera que sea la función de C I'" Estamos en el caso de unarranque completo, con los límites de s¡= 1, sr~O. Aplicando valores resul-ta que:
que coincide exactamente con la energía cinética de las masas del rotar ensu movimiento giratorio.
A continuación vamos a realizar el mismo cálculo para la determinaciónde la energía disipada en el estátor durante un proceso de arranque:
Itf
W e = 3· 112
. R 1 . d I
t¡
es cómodo referir esta integral a la anterior. Despreciaremos la corrientemagnetizan te, ya que en la mayor parte del proceso las corrientes de estátor y de rotar son muy altas y superiores a 1m; por tanto, tendremos que:
Finalmente, haciendo transformaciones parecidas a las anteriormenterealizadas para el rotar, tendremos que:
? f S = S ¡ R 1 s·dsW
e == no -'} -,- -----
s=sf R2 (s ) (1 - Cr/C m)
Vemos que la integral tiene la misma forma que la que calcula la energíadisipada en el rotar, con la diferencia de que está afectada por la expresión:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 60/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 61/343
40 ARRA QUE 1 DUSTRIAL DE MOTORES ASINCRO OS
Potencia almacenada. Función de:
• Masa del bobinado .• Calor específico del bobinado.• Incremento de temperatura.
En la integración de la ecuación diferencial intervienen las condicionesde contorno.
En el capítulo dedicado a problemas térmicos daremos más detalle a la presentación de los métodos para calcular el calentamiento durante elarranque; aquí vamos a presentar un método simplificado.
El arranque es de duración muy corta y los mecanismos de transmisiónde calor, aunque existen desde el principio del proceso, tienen muy pocaimportancia en las primcras fases, ya que la temperatura es baja al princi- pio. Los devanados del motor trabajan en régimen adiabático y el balanceenergético ahora es:
Potencia de pérdidas = Potencia almaccnada en el bobinado
esta igualdad aproximada extendida a todo el ticmpo de arranque es:
Energía de pérdidas = Energía almacenada en el bobinadoEl método, además de ser aproximado, tiene la ventaja de dar una cota
superior del calentamiento.Ahora tendremos que la energía perdida en el rotor W r se invierte en
calentar la jaula rotórica, y que W e calicnta el bobinado estatórico.En el Ejemplo 2.2 desarrollamos el método para un caso práctico.
Ejemplo 2.2
Es un accionamiento que emplea un motor de cortocircuito con los siguien-tes datos nominales:
Potencia (kW) 200 Velocidad (r.p.m.) 586
Inercia conjunta (kg· m2) 95 R I (Ohm) 0,0050
R2' función lineal del deslizamiento para SN 0,0060;
para s = 1 0,0150 Núm. polos 10
El par resistente y el motor se dan en las columnas 2.a y 3.a de la tablaque viene a continuación.
Datos de los bobinadosCobrc de estátor Aluminio de rotor
Masa (kg)40
15
Calor específico (J/kg· 0c)
385,18921,09
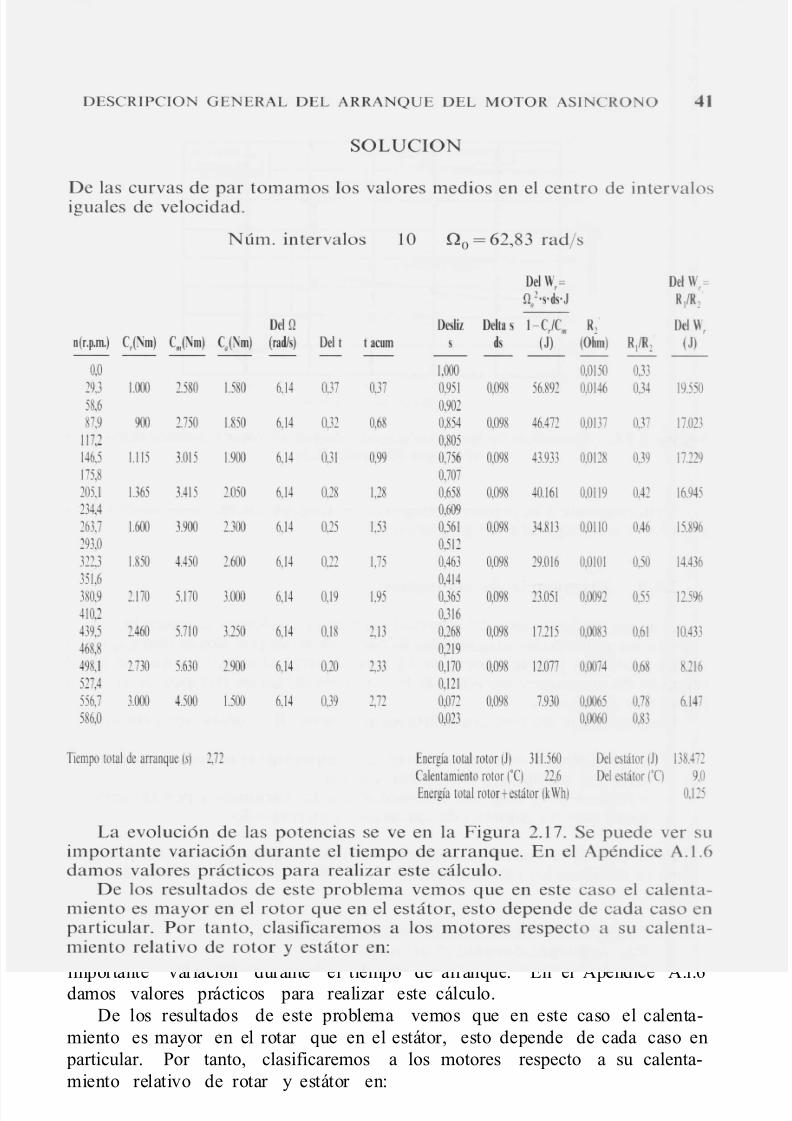
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 62/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 41
SOLUCION
De las curvas de par tomamos los valores medios en el centro de intervalosiguales de velocidad.
Núm. intervalos 10 º o = 62,83 rad/s
D e l W ,= D e l W ,=n /·s ·d s ·J R ¡ lR ,
D e l n D e s l i z D e l t a s I-C ,IC m R , D e l W ,
n ( r .p .m .) C ,( N m ) C m ( N m ) C ,( N m ) ( r a d /s ) D e l t t a r u m s d s ( J ) ( O h m ) R ¡ lR ¡ ( J )-
0 . 0 1 , 0 0 0 0 , 0 1 5 0 0 .3 3
2 9 . 3 1 .0 0 0 2 .5 8 0 1 . 5 8 0 6 . 1 4 0 . 3 7 0 . 3 7 0 , 9 5 1 0 , 0 9 8 5 6 , 8 9 2 0 , 0 1 4 6 0 . 3 4 1 9 . 5 5 0
5 8 . 6 0 , 9 0 2
8 7 ,9 9 0 0 2 ,7 5 0 1 . 8 5 0 6 . 1 4 0 . 3 2 0 , 6 8 0 , 8 5 4 0 , 0 9 8 4 6 . 4 7 2 0 , 0 1 3 7 0 , 3 7 1 7 .0 2 3
1 1 7 ,2 0 ,8 0 5
1 4 6 ,5 1 . 1 1 5 3 . 0 1 5 1 .9 0 0 6 ,1 4 0 .3 1 0 ,9 9 0 , 7 5 6 0 , 0 9 8 4 3 .9 3 3 0 , 0 1 2 8 0 , 3 9 1 7 .2 2 9
1 7 5 ,8 0 ,7 0 7
2 0 5 ,1 1 3 6 5 3 . 4 1 5 2 0 5 0 6 , 1 4 0 , 2 8 1 , 2 8 0 , 6 5 8 0 , 0 9 8 4 0 .1 6 1 0 . 0 1 1 9 0 , 4 2 1 6 .9 4 5
2 3 4 ,4 0 ,6 0 92 6 3 ,7 1 .6 0 0 3 . 9 0 0 2 .3 0 0 6 ,1 4 0 ,2 5 1 ,5 3 0 ,5 6 1 0 . 0 9 8 3 4 . 8 1 3 0 . 0 1 1 0 0 , 4 6 1 5 .8 9 6
2 9 3 ,0 0 ,5 1 2
J 2 2 .3 1 .8 5 0 4 .4 5 0 2 ,6 0 0 6 ,1 4 0 , 2 2 1 , 7 5 0 , 4 6 3 0 , 0 9 8 2 9 . 0 1 6 0 .0 1 0 1 0 , 5 0 1 4 .4 3 6
3 5 1 , 6 0 , 4 1 4
3 8 0 . 9 2 . 1 7 0 5 ,1 7 0 3 .0 0 0 6 . 1 4 0 , 1 9 1 . 9 5 0 .3 6 5 0 ,0 9 8 2 1 0 5 1 0 , 0 0 9 2 0 . 5 5 1 2 . 5 9 6
4 1 0 . 2 0 , 3 1 6
4 3 9 ,5 2 .4 6 0 5 ,7 1 0 3 .2 5 0 6 , 1 4 0 , 1 8 2 . 1 3 0 , 2 6 8 0 , 0 9 8 1 7 ,2 1 5 0 , 0 0 8 3 0 . 6 1 1 0 .4 3 3
4 6 8 ,8 0 ,2 1 9
4 9 8 . 1 2 7 3 0 5 ,6 3 0 2 9 0 0 6 , 1 4 0 .2 0 2 . 3 3 0 , 1 7 0 0 , 0 9 8 1 2 , 0 7 7 0 , 0 0 7 4 0 . 6 8 8 .2 1 6
5 2 7 ,4 0 .1 2 15 5 6 ,7 3 . 0 0 0 4 .5 0 0 1 5 0 0 6 ,1 4 0 .3 9 2 ,7 2 0 .0 7 2 0 ,0 9 8 7 ,9 3 0 0 , 0 0 6 5 0 , 7 8 6 .1 4 7
5 8 6 ,0 0 , 0 2 3 0 , 0 0 6 0 0 , 8 3
T ie m p o to ta l d e a r r a n q u e ( s ) 2 ,7 2 E n e r g ía to ta l r o to r ( J I 3 1 1 .5 6 0 D e l e s tá to r iJ l 1 3 8 .4 7 2
C a le n ta m ie n to r o lo r r C ) 2 2 ,6 D e l e s tá to r ( 'e l 9 , 0
E n e r g ía to ta l r o to r + e s tá to r ( k W h ) 0 ,1 2 5
La evolución de las potencias se ve en la Figura 2.17. Se puede ver su
importante variación durante el tiempo de arranque. En el Apéndice A.l.6damos valores prácticos para realizar este cálculo.De los resultados de este problema vemos que en este caso el calenta-
miento es mayor en el rotar que en el estátor, esto depende de cada caso en particular. Por tanto, clasificaremos a los motores respecto a su calenta-miento relativo de rotar y estátor en:
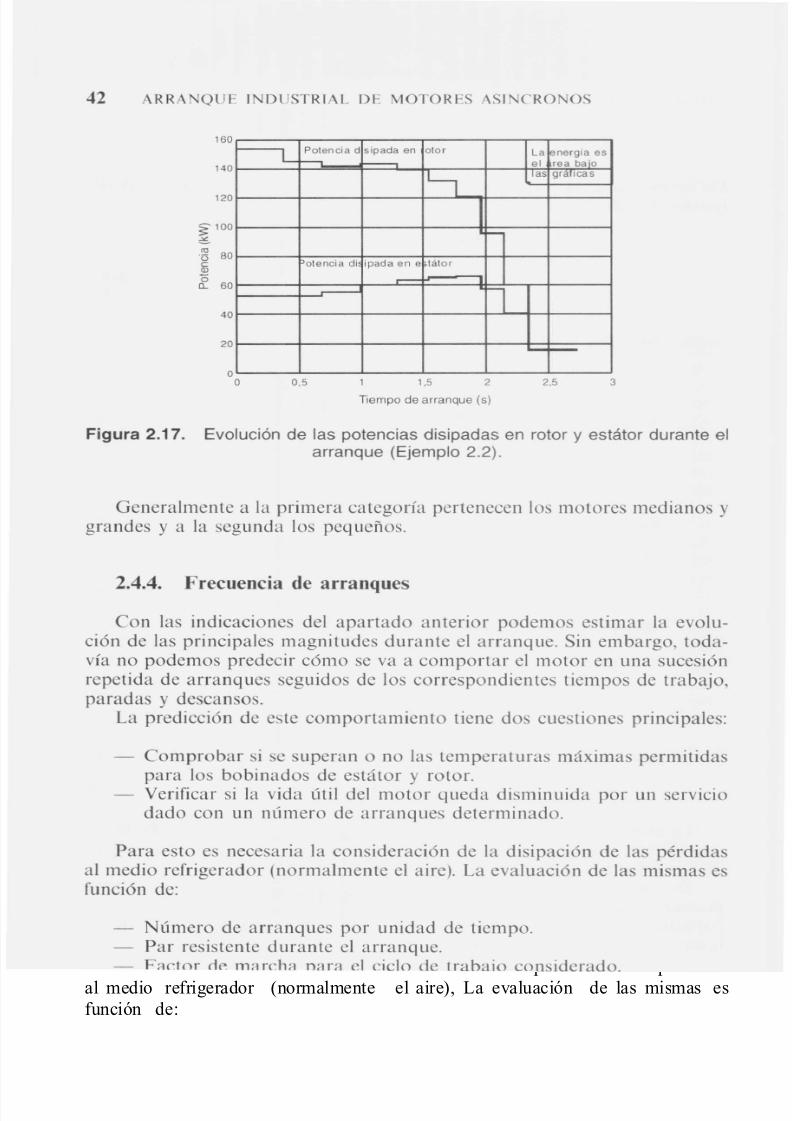
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 63/343
42 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
160
140
120
~ 100
6
'" 80'ü
a lOO- 60
40
20
~ Po ten ci a d s ip ad a en o to r La ~nergía es~
el rea ba"o
~I as graflcas
I-
otencia di i p ad a en e tátor
-1--
oO 0,5 1.5 2
Tiempo de arranque (s)
2,5
Figura 2.17. Evolución de las potencias disipadas en rotor y estátor durante elarranque (Ejemplo 2.2).
Generalmente a la primera categoría pertenecen los motores medianos y
grandes y a la segunda los pequeños.
2.4.4. Frecuencia de arranques
Con las indicaciones del apartado anterior podemos estimar la evolu-ción de las principales magnitudes durante el arranque. Sin embargo, toda-vía no podemos predecir cómo se va a comportar el motor en una sucesión
repetida de arranques seguidos de los correspondientes tiempos de trabajo, paradas y descansos.La predicción de este comportamiento tiene dos cuestiones principales:
Comprobar si se superan o no las temperaturas máximas permitidas para los bobinados de estátor y rotor.Verificar si la vida útil del motor queda disminuida por un serviciodado con un número de arranques determinado.
Para esto es necesaria la consideración de la disipación de las pérdidasal medio refrigerador (normalmente el aire), La evaluación de las mismas esfunción de:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 64/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASTNCRONO 43
Inercia total del motor y de la máquina accionada. Es usual definir elFactor de Inercia (FI) como la relación:
FI Inercia del motor+ Inercia de la máquina
Inercia del motor
Características térmicas del motor considerado y, en particular, el poder de disipación y las constantes de tiempo térmicas.
La solución satisfactoria de este problema, desde el punto de vista práctico, se hace con los datos de fabricantes.
En los apéndices tenemos información sobre arranque frecuente, parados clases diferentes de motores:
A.2.I Frecuencia de arranques permitida para motores pequeños.A.2.2 Frecuencia de arranques permitida para motores medianos y
grandes.
Sin embargo, vamos a hacer un tratamiento simplificado del problema para comprenderlo mejor.
Nos vamos a ceñir a los motores pequeños de hasta 15~ 20 kW, que sonlos normalmente empleados en máquinas herramientas y de elevación, cuyacaracterística principal de servicio es un gran número de arranques y para-das por unidad de tiempo. Los fabricantes suministran estos motores con un
freno mecánico, de construcción monobloque con el motor, de tal modo quelos frenados son mecánicos y así se puede aliviar al motor de las pérdidasdel frenado eléctrico. Apenas se alcanza la velocidad estable de servicio delmotor con la máquina arrastrada.
Las consideraciones que siguen son simplificadas y consisten principal-mente en:
El par motor durante el arranque es constante, y se expresa enfunción del par de arranque C", mediante una constante K, que puede ser mayor o menor que la unidad. La experiencia dice que, para motores pequeños, esta constante se encuentra entre 0,9 y 1,0.El par resistente C r es asimismo constante durante todo el proceso deaceleración; ésta es una situación normal en maquinaria de elevacióny bastante corriente en máquina herramienta.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 65/343
44 ARRANQ E 1 DUSTRIAL DE MOTORES ASINCRONOS
Ca
Cr
P
r t Pmee
Figura 2.18. Representación de las curvas de par-velocidad, velocidad-tiempo
y potencia-tiempo para servicio en motores pequeños.
Durante el arranque se cumple:
dada la constancia de lo pares, tenemos que:
y además la curva velocidad-tiempo es una recta que pasa por el origen, tal
como se ve en la Figura 2.18. Transformando la ecuación resulta que:
ºN·JM1,,= ---
K·C"
FI
Esta ecuación da el tiempo necesario para el arranque en el caso particu-
lar de motor sin acoplar, arrancando sin carga (F 1 = 1, Cr = O):

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 66/343
DESCRIPCION GENERAL DEL ARRANQUE DEL MOTOR ASINCRONO 45
Se podrá expresar el tiempo de arranque en otras condiciones cuales-quiera, mediante este tiempo t"o' de acuerdo con la siguiente ecuación:
Fl
La potencia electromagnética es constante durante el arranque y seasume que la potencia tomada de la red es prácticamente igual a ella. Esta
potencia electromagnética es igual al producto del par motor (K· e " que seha asumido constante durante el proceso) por la velocidad síncrona (quese asume igual a nN):
La potencia tomada se reparte (véase Apéndice A.l.5) del siguientemodo:
Potencia mecánica Plllec
= P elll • (1 - s ).
Potencia eléctrica disipada en el rotor Prol
= P elll· s.
Sus evoluciones se ven en la parte inferior de la Figura 2.18.La energía disipada en el rotor durante el proceso de arranque es el
triángulo sombreado de la figura, y su valor asciende a:
W r = n/·1M·
FI
C r 1---
K·C"
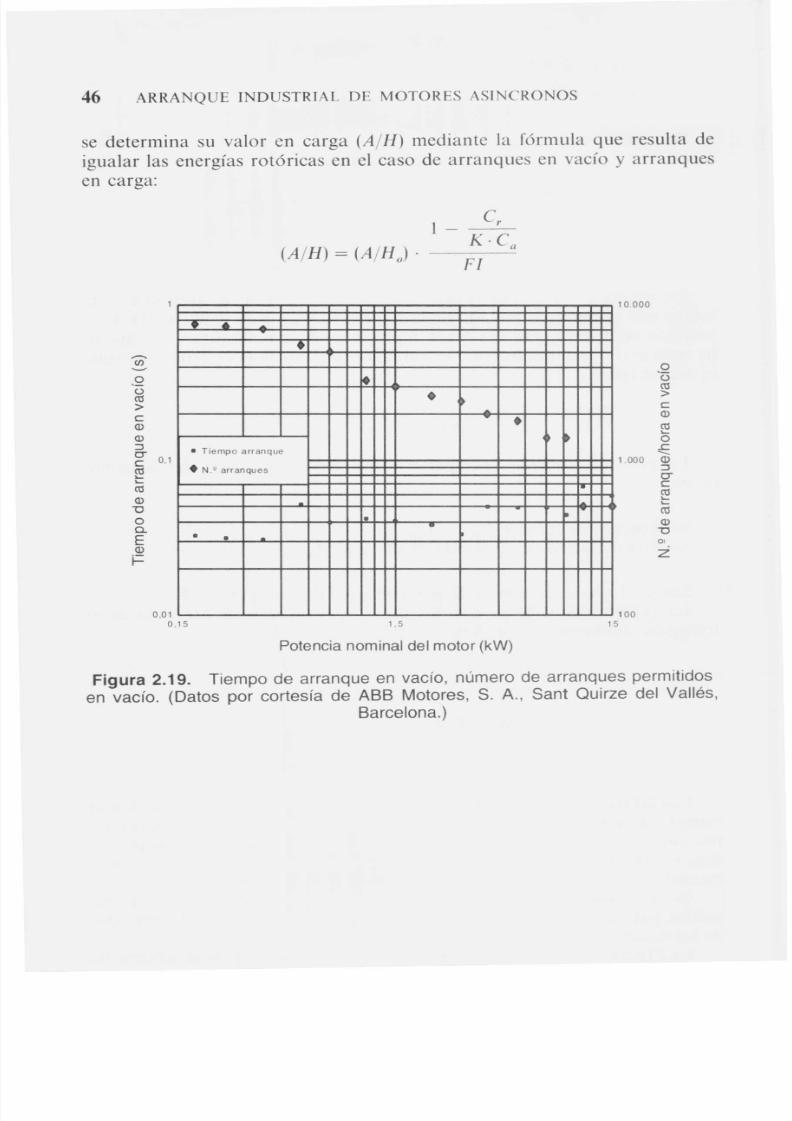
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 67/343
46 ARR ANQ UE INDUSTRIAL DE M OTORES ASINCR ONOS
se determina su valor en carga (A/H) mediante la fórmula que resulta deigualar las energías rotóricas en el caso de arranques en vacío y arranquesen carga:
1 -
(A/H) =(A/H o) .
10.000
0 0 -
,2ut1l
>ealal:: Jg - o . '¡ gt1l
al"O
oD..
Eal¡=
•
•1 6
••
• Tiempo arranque
• N.o arranques
. . . .. .
o'(3
t1l>ealt1l
o~
1.000 W :: Jrr e
¡ gt1l
al"O
0,0'0,15 1,5
Potencia nominal del motor (kW)
'0015
Figura 2.19. Tiempo de arranque en vacío, número de arranques permitidos
en vacío. (Datos por cortesía de ABB Motores, S. A., Sant Quirze del Vallés,Barcelona.)
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 68/343
CAPITULO
TRESLOS MODOS DE ARRANQUE
CONVENCION ALE S
En este capítulo vamos a describir con detalle los modos de arranqueconvencionales existentes para lograr que los accionamientos con motor de
corriente alterna asíncrono cumplan al arrancar requisitos tales como:- Aceleración controlada.- Tiempo de arranque.- Limitación del calentamiento en los bobinados.- Intensidad absorbida y caída de tensión permitida.
Por modos de arranque convencionales designamos a los que recurrena dispositivos de tipo electromecánico o electromagnético. Se excluyen los
dispositivos basados en semiconductores. En este capítulo, además de des-cribir cada modo de arranque, indicaremos las posibilidades que tienen para cumplir con las especificaciones que se establezcan. Además, no existensoluciones únicas para un problema determinado de arranque, ni tampocouno o varios modos de arranque concretos son superiores a los demás. Elcapítulo se divide en cuatro partes que tratan, respectivamente, de:
Modos frecuentes para motores de rotor en cortocircuito.Modos poco empleados para motores de cortocircuito.
Modos convencionales para motores de rotor bobinado.Modos con dispositivos mecánicos en la transmisión.
3.1. MODOS CONVENCIONALES DE ARRANQUEPARA MOTORES DE ROTOR EN CORTOCIRCUITO
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 69/343
48 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
éstos, en los de cortocircuito el problema es mucho más difícil, ya que no se
puede intervenir en el circuito de rotar y, por tanto, las prestaciones de unmodo determinado no son sino un compromiso entre tendencias opuestas para par y corriente.
Al haber sido desarrollados tantos métodos, algunos son de empleo másfrecuente y se han impuesto sobre los demás; son los siguientes:
Arranque directo.Arranque con resistencias en serie con el estátor.Arranque con reactancias en serie con el estátor.Arranque con transformador o autotransformador.Arranque estrella-triángulo.
Desarrollaremos primeramente los citados y, posteriormente, describire-mos los considerados menos frecuentes, tales como:
Arranque con bobinado parcial.Arranque con el motor de varias velocidades.Arranque con motor auxiliar.Arranque con bobinado partido.
3.1.1. Arranque directo
Es el modo más simple, más seguro y más empleado. Todo lo visto en elCapítulo 2 sobre arranque se aplica sin más al estudio del arranque directodel motor de rotor en cortocircuito. El motor toma los valores, que corres- ponden para cada deslizamiento, de las curvas de par e intensidad vistas enel Apartado 2.2.2. La corriente, sobre todo en los primeros instantes, ascien-de a valores que van desde las 4 a las 8 veces de su valor nominal. Este valor
máximo en casos de motores mal diseñados puede llegar a 10 veces. Sinembargo, la continua mejora en las redes de distribución de las empresassuministradoras de energía eléctrica hace que en zonas adecuadas de la redse puedan arrancar en directo los mayores motores asíncronos construidosque superan los 10.000 kW.
En la Figura 3.1 se ve el circuito de potencia para un arranque directode un motor asíncrono mediante contactor. A pesar de las ventajas de estetipo de arranques, y la más importante es la simplicidad, y aunque sedisponga de una red de capacidad suficiente, hay ocasiones en las que no se
puede emplear. Nos referimos a los casos en los que el par motor superatanto al par resistente, que el par acelerador es muy fuerte. Esto tiene quecoincidir con una inercia total de accionamiento baja. En consecuencia lasaceleraciones pueden ser excesivas y producir problemas tales como:
Roturas en los elementos mecánicos de máquina y transmisión.- F~lt~ n ronfort n n r<:on~<:<:i<:Ptr~t~ n v hírlllo<:
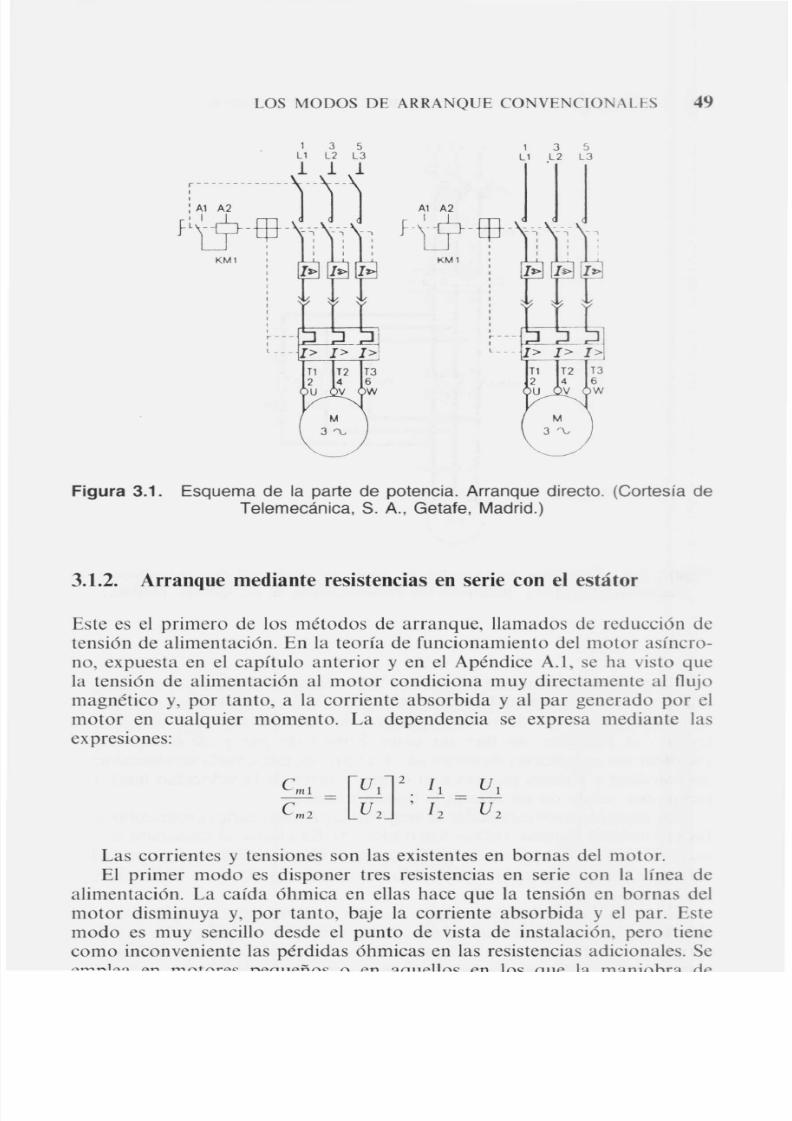
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 70/343
LOS MODOS DE ARRA QUE CONVENCIONALI:S 49
Figura 3.1. Esquema de la parte de potencia. Arranque directo. (Cortesía de
Telemecánica, S. A., Getafe, Madrid.)
3.1.2. Arranque mediante resistencias en serie con el estátor
Este es el primero de los métodos de arranque, llamados de reducción detensión de alimentación. En la teoría de funcionamiento del motor asíncro-no, expuesta en el capítulo anterior y en el Apéndice A.l, se ha visto que
la tensión de alimentación al motor condiciona muy directamente al flujomagnético y, por tanto, a la corriente absorbida y al par generado por elmotor en cualquier momento. La dependencia se expresa mediante lasexpreSIOnes:
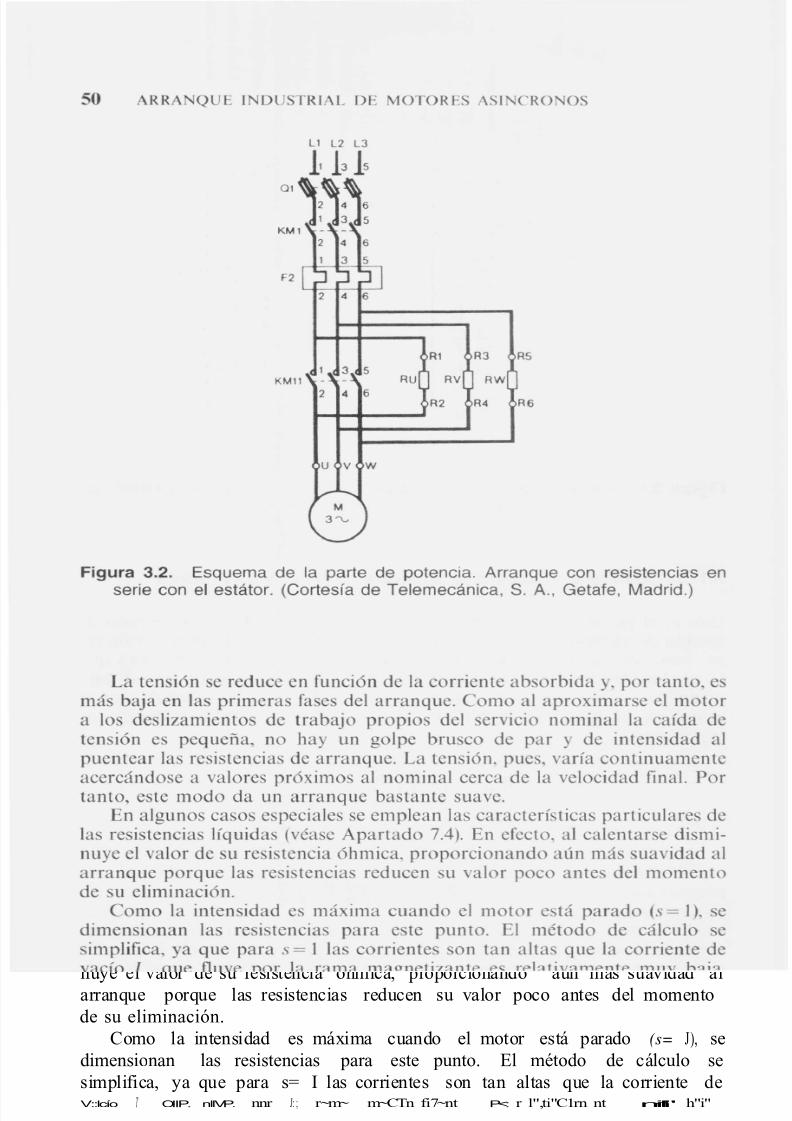
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 71/343
50 ARRANQUE INO STRIAL DE MOTORES ASINCRONOS
Rl R3 RS
RU RV RW
2 4 6
R2 R4 R6
u V W
Figura 3.2. Esquema de la parte de potencia. Arranque con resistencias enserie con el estátor. (Cortesía de Telemecánica, S. A., Getafe, Madrid.)
La tensión se reduce en función de la corriente absorbida y, por tanto, esmás baja en las primeras fases del arranque. Como al aproximarse el motor a los deslizamientos de trabajo propios del servicio nominal la caída detensión es pequeña, no hay un golpe brusco de par y de intensidad al
puentear las resistencias de arranque. La tensión, pues, varía continuamenteacercándose a valores próximos al nominal cerca de la velocidad final. Por tanto, este modo da un arranque bastante suave.
En algunos casos especiales se emplean las características particulares delas resistencias líquidas (véase Apartado 7.4). En efecto, al calentarse dismi-
nuye el valor de su resistencia óhmica, proporcionando aún más suavidad alarranque porque las resistencias reducen su valor poco antes del momentode su eliminación.
Como la intensidad es máxima cuando el motor está parado (s= J), sedimensionan las resistencias para este punto. El método de cálculo sesimplifica, ya que para s= I las corrientes son tan altas que la corriente deV::lcío T OIIP. nllVP. nnr J: ; r~m~ m~CTn fi7~nt P<: r l",ti"C1rn nt mil" h"i"

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 72/343
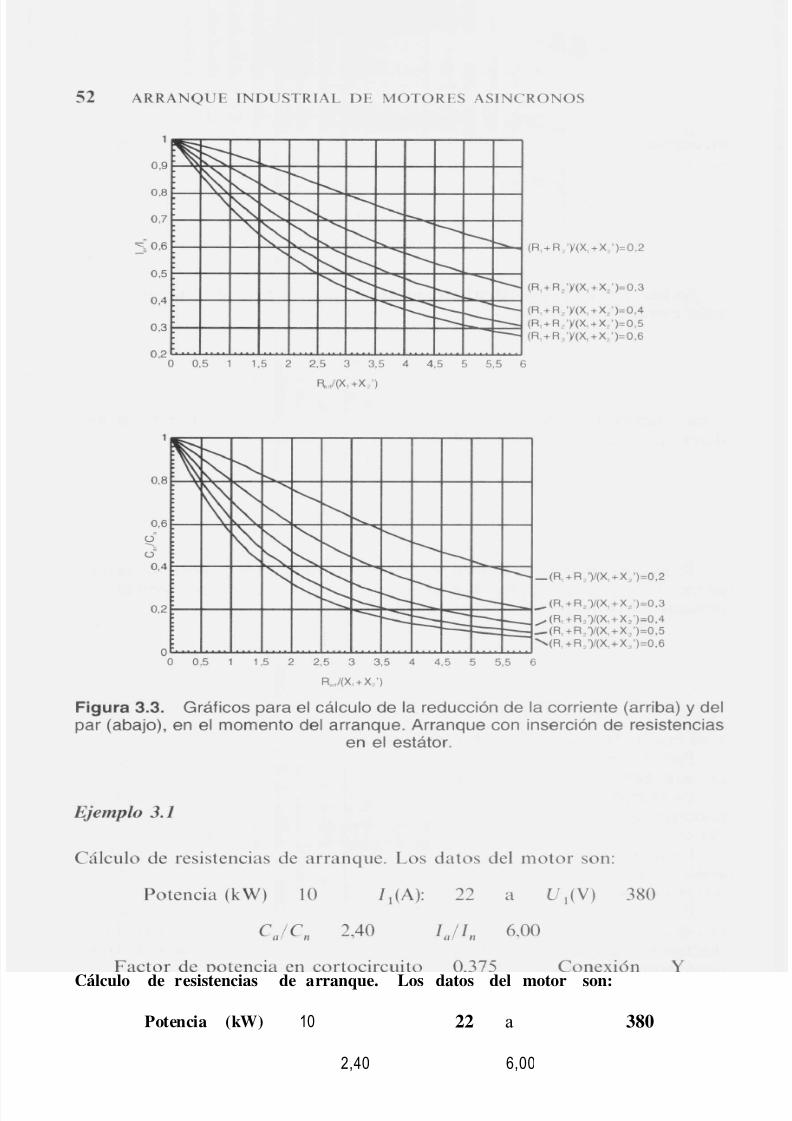
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 73/343
52 ARRANQUE INDUSTRIAL DE M OTORES ASINCRONO S
0,9
0,8
0,7
:) 0,6
O ,S
0,4
0,3
0,2 ° O,S 1 1,S 22,S 33,S 44,S S S,S 6
R,,1(X, +X,')
(R, + R ,'Y(X, + X,' )=0,2
(R, + R, 'Y(X, + X,' )=0,3
(R, + R,'Y(X, + X,')=0,4
(R, + R ,'Y(X, + X,' )=O,S
(R, + R ,'Y(X, + X,' )=0,6
0,6
' ,2 "o'
0,4
0,2
° ° O ,S
_ (R, + R, ')/(X, +X, ')=0,2
_ (R,+R,')/(X,+X,')=0,3
___(R,+R,')/(X,+X,')=0,4
_(R,+R,')/(X,+X,')=O,S
'(R, +R,')/(X,+X,')=0,6
1~ 2 as 3 as 4 ~S S ~S 6
R,,/(X, + X,')
Figura 3.3. Gráficos para el cálculo de la reducción de la corriente (arriba) y del
par (abajo), en el momento del arranque. Arranque con inserción de resistencias
en el estátor.
Ejemplo 3.1
Cálculo de resistencias de arranque. Los datos del motor son:
Potencia (kW) 10
2,40
22 a
6,00
380

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 74/343
LOS MODOS DE ARRANQUE CONVENCIONALES 53
SOLUCION
Z/fase Conexión Y (Ohm) 1,66 la l/la deseado 0,40
Resistencia/fase R1 + R~ (Ohm) 0,62 Del gráfico
Reactancia/fase X ¡+ X~ (Ohm) 1,54 Rad/(R ¡+ R~) 5,25
R¡ +R ~/Xl +X ~ 0,40 Rad(Ohm) 3,27
Los cálculos detallados de este arranque están en el Apéndice A.3.2 y seexpresan gráficamente en la Figura 3.4.
En esta figura se puede observar todo lo dicho antes sobre la evoluciónde los principales parámetros durante el arranque.Cuando se desea únicamente la reducción del par de arranque para
tener aceleraciones más suaves, y no hay problemas de introducir asimetríasen la red, se emplea una resistencia en serie con una cualquiera de las fases.En estos casos la reducción de intensidad es pequeña en la fase en la queestá la resistencia, y en las otras dos hay incluso un pequeño incremento. Ladisminución importante de par se logra, ya que la alimentación está dese-quilibrada y aparece un campo magnético inverso.
Es el caso del arranque que se denomina en la literatura alemana,KUSA (KUrzschluBHiufer-SAnftanlauf), empleado para motores pequeñosque arrancan con pares resistentes muy suaves o casi en vacío. El método esmuy económico en aparellaje. La reducción del par que se logra es funciónde la relación entre la resistencia que se inserta y la impedancia que tiene elmotor a rotar parado (punto de cortocircuito). En el gráfico de la Figu-ra 3.5 se dan los valores reductores para dos valores de factor de potenciadel motor a rotar parado (0,3 y 0,5).
Par motor (pu)2
1,5
0,5
Intensidad (pu)6
4,5
3
1,5
oo 0,2 0,4 0,6
Deslizamiento (pu)
0,8o
1
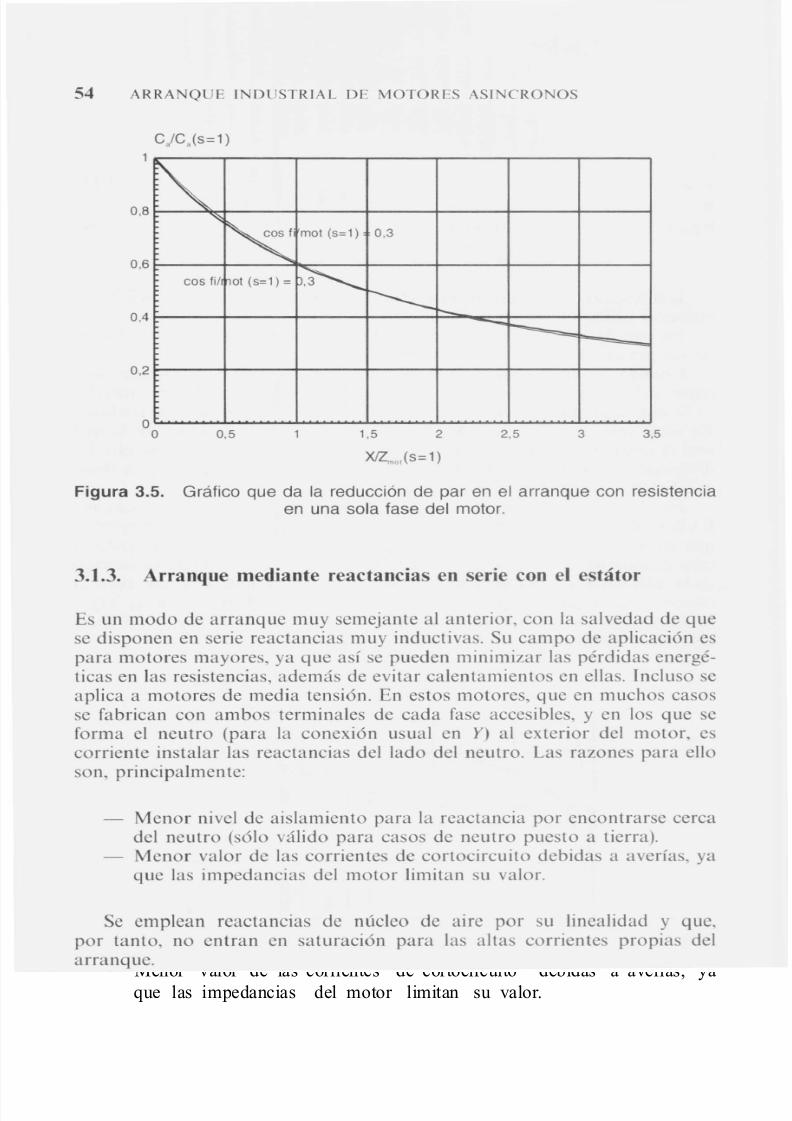
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 75/343
54 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
3,532,521,50,5° °
0,2
C/C,(s=1)1
0,4
0,6
0,8
Figura 3.5. Gráfico que da la reducción de par en el arranque con resistencia
en una sola fase del motor.
3.1.3. Arranque mediante reactancias en serie con el estátor
Es un modo de arranque muy semejante al anterior, con la salvedad de quese disponen en serie reactancias muy inductivas. Su campo de aplicación es para motores mayores, ya que así se pueden minimizar las pérdidas energé-ticas en las resistencias, además de evitar calentamientos en ellas. Incluso seaplica a motores de media tensión. En estos motores, que en muchos casosse fabrican con ambos terminales de cada fase accesibles, y en los que seforma el neutro (para la conexión usual en Y) al exterior del motor, escorriente instalar las reactancias del lado del neutro. Las razones para elloson, principalmente:
Menor nivel de aislamiento para la reactancia por encontrarse cercadel neutro (sólo válido para casos de neutro puesto a tierra).
Menor valor de las corrientes de cortocircuito debidas a averías, yaque las impedancias del motor limitan su valor.
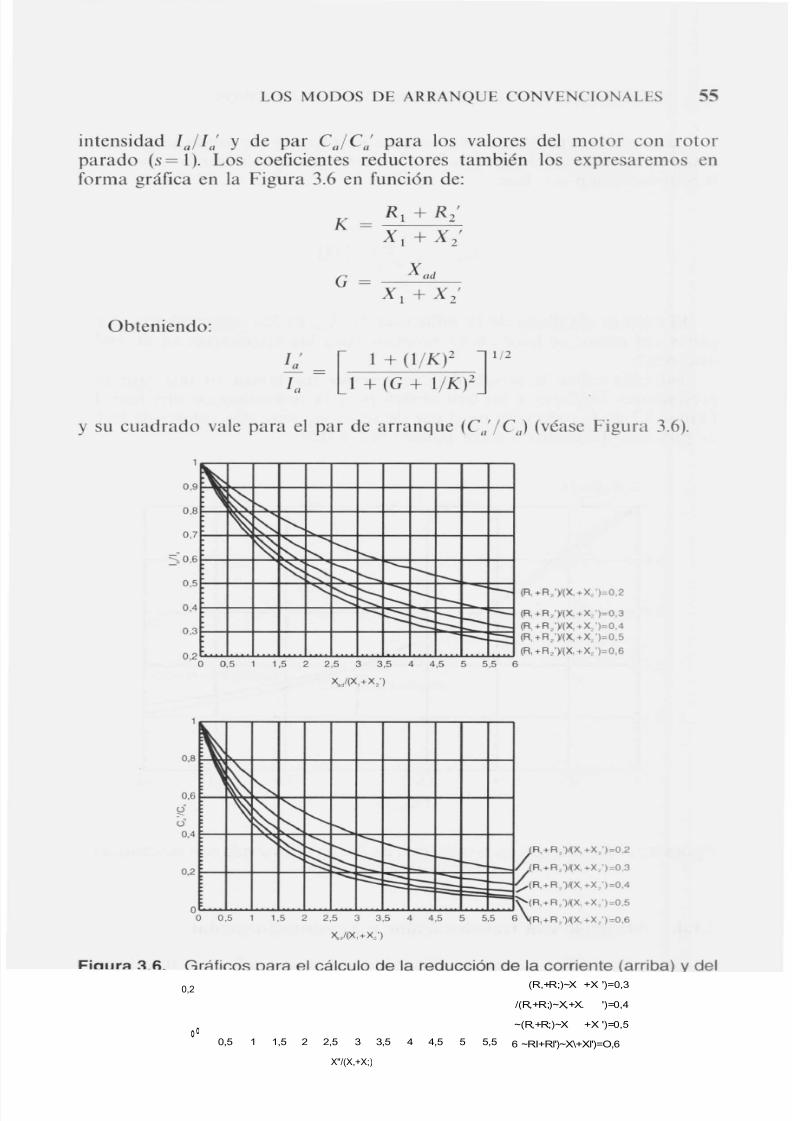
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 76/343
LOS MODOS DE ARRANQUE CONVENCIONALES SS
intensidad la! 1a' y de par C a l C a' para los valores del motor con rotor parado (5 = 1). Los coeficientes reductores tam bién los expresaremos enforma gráfica en la Figura 3.6 en función de:
R l + R2'
K=---
Xl + X2'
G
Obteniendo:
la ' = [ I+ (I/Kf ] l/2
la I + (G + I/K)2
y su cuadrado vale para el par de arranque (C ,,' / C al (véase Figura 3.6).
~,~ i ' . . .
~ ~ " ' -~ : : : : - - " ' - 1 '- - -
~ ~ i"- -r-. . . . . . . . . -" ' - ~ r- t--. . . . . . . • • . . . . • . . -. . . . . . . . : : : : : t:-- ---r--
t--
0,9
0,8
0,7
: : ; 0 , 6
0,5
0,4
0,3
0,5 1 1,5 2 2,5 3 3,5
x,,1(X,+X;)
(R,+R;Y(X,+X ')=0,2
(R,+R;Y(X,+X ')=0,3
(R,+R;Y(X,+X ')=0,4
(R,+R;Y(X,+X ')=0,5
(R,+R;Y(X, +X;)=0,6
4 4,5 5 5,5 6
0,6
Q "
o "0,4
0,2
°° 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5
X"/(X,+X;)
R,+R;)~X, +X ')=0,2
(R,+R;)~X +X ')=0,3
/(R,+R;)~X,+X. ')=0,4
~(R,+R;)~X +X ')=0,5
6 ~RI+Rl')~X\+Xl')=O,6
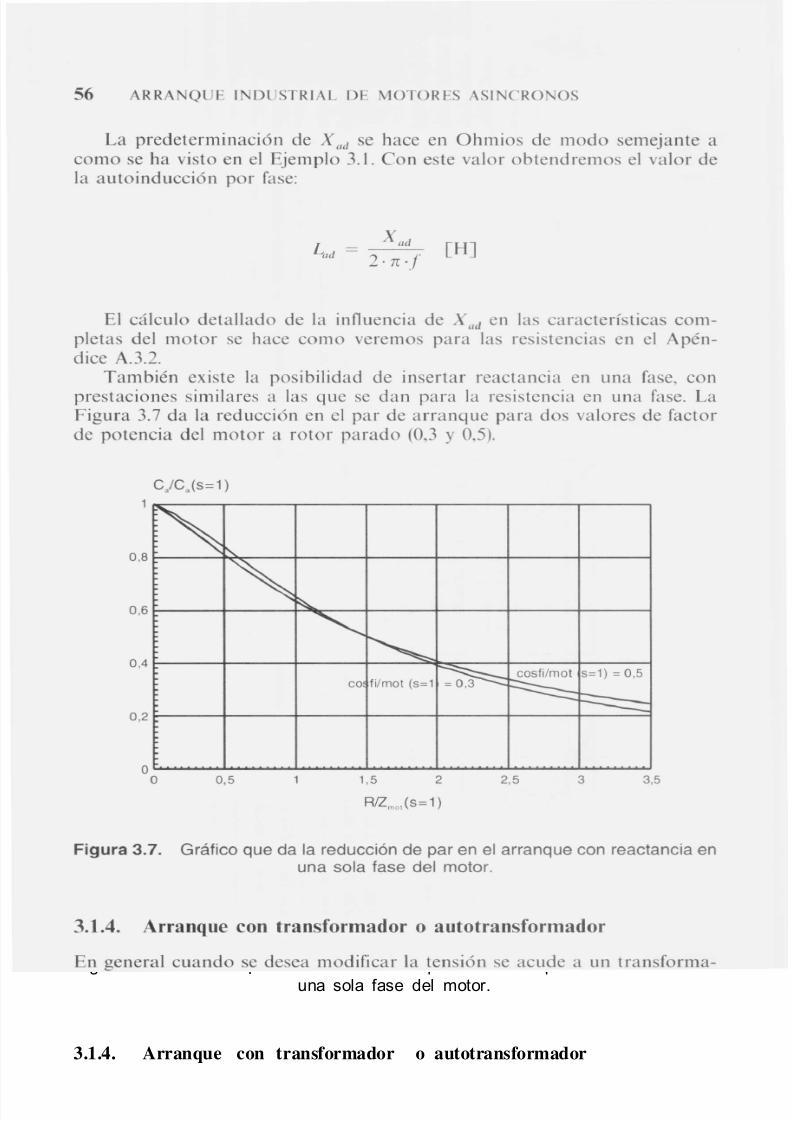
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 77/343
56 ARRANQUE INDUSTRIAL DE MOTORES ASI CRONOS
La predeterminación de Xi/el se hace en Ohmios de modo semejante acomo se ha visto en el Ejemplo 3.1. Con este valor obtendremos el valor dela autoinducción por fase:
X " , 1
2· 7[·f [HJ
El cálculo detallado de la influencia de Xi/el en las características com-
pletas del motor se hace como veremos para las resistencias en el Apén-dice A.3.2.También existe la posibilidad de insertar reactancia en una fase, con
prestaciones similares a las que se dan para la resistencia en una fase. LaFigura 3.7 da la reducción en el par de arranque para dos valores de factor de potencia del motor a rotor parado (0,3 y 0,5).
C/C.(s=1)
1
0,8
0.6
0,4
0,2
° ° 0,5 1,5 2 2,5 3 3,5
Figura 3.7. Gráfico que da la reducción de par en el arranque con reactancia en
una sola fase del motor.
3.1.4. Arranque con transformador o autotransformador
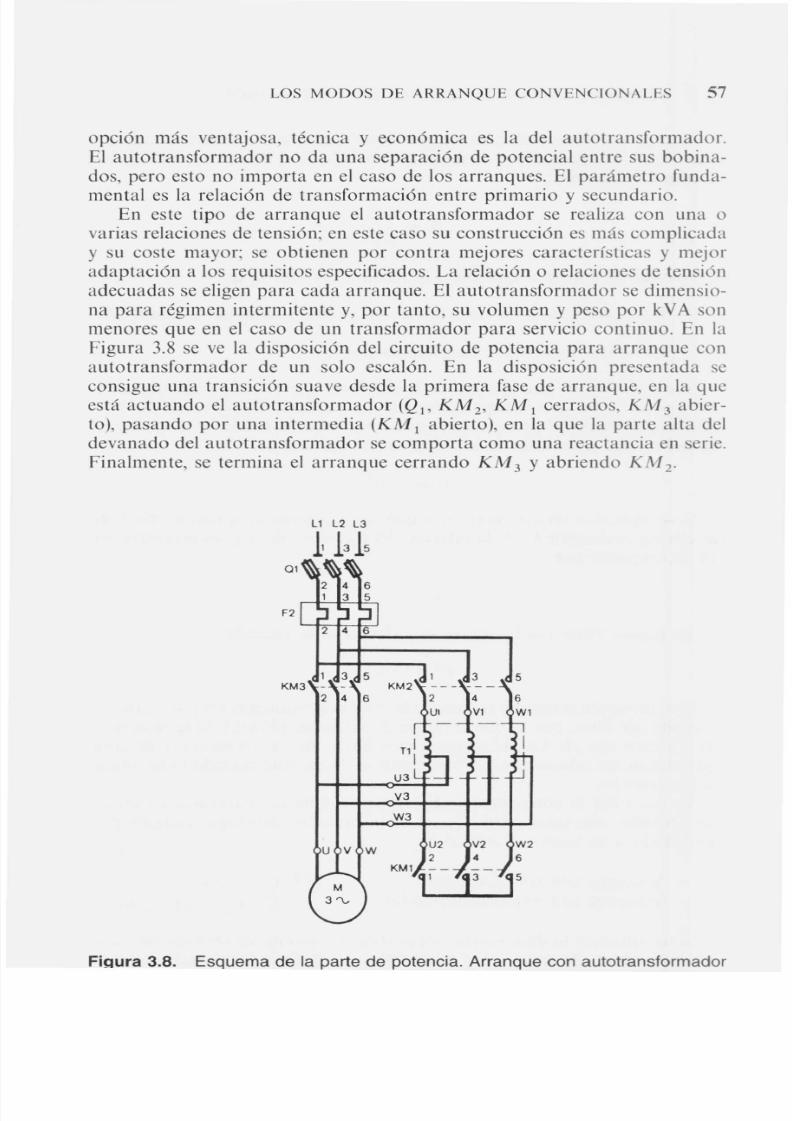
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 78/343
LOS MODOS DE ARRANQUE CONVENCIONALES 57
0pclOn más ventajosa, técnica y económica es la del autotransformador.El autotransformador no da una separación de potencial entre sus bobina-
dos, pero esto no importa en el caso de los arranques. El parámetro funda-mental es la relación de transformación entre primario y secundario.
En este tipo de arranque el autotransformador se realiza con una ovarias relaciones de tensión; en este caso su construcción es más complicaday su coste mayor; se obtienen por contra mejores características y mejor adaptación a los requisitos especificados. La relación o relaciones de tensiónadecuadas se eligen para cada arranque. El autotransformador se dimensio-na para régimen intermitente y, por tanto, su volumen y peso por kVA sonmenores que en el caso de un transformador para servicio continuo. En la
Figura 3.8 se ve la disposición del circuito de potencia para arranque conautotransformador de un solo escalón. En la disposición presentada seconsigue una transición suave desde la primera fase de arranque, en la queestá actuando el autotransformador (Q¡, K M 2' K M ¡cerrados, K M 3 abier-to), pasando por una intermedia (KM 1 abierto), en la que la parte alta deldevanado del autotransformador se comporta como una reactancia en serie.Finalmente, se termina el arranque cerrando KM 3 Y abriendo KM 2'
L1 L2 L3
1 1 3 1 5

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 79/343
58 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Vamos a estudiar el caso de un transformador o autotransformador cuyas tensiones primaria y secundaria son U 1 Y U 2' Por tanto, su relación
de transformación es:
u
Cuando el motor se conecta a la tensión U 2 resulta que:
Las corrientes absorbidas por el motor del secundario se multiplicanpor ü.
Los pares motores se multiplican por ü2.
Sin embargo, lo que interesa es la corriente que el motor absorbe de lared, que es como en todo transformador ü veces el valor absorbido en ellado secundario (siempre que se pueda despreciar la corriente magnetizan-te), por lo que las corrientes de línea se multiplican por:
..". . . ')u·u = u-
Si se especifica un arranquc en el que las intensidades se han de multipli-car por un coeficiente k <1, la relación del transformador o autotransforma-dor se calculará por:
ü =fiYa hemos visto que los pares se reducen en la relación:
Este modo de arranque reduce en la misma proporción los pares que lascorrientes de línea, por lo que el índice de arranque (Nm/kV A) se mantiene.Recordemos que de los arranques vistos hasta ahora los motores de jaulacon resistencias o inductancias lo empeoran, luego este método tiene venta-
jas interesantes.Vamos a dar la potencia aparente que hace falta para arrancar un motor
que absorbe una intensidad 11 " en el instante de arranque cuando está
alimentado a su tensión nominal U 1 :
Arranque con transformador Arranque con autotransformador
Si recordamos lo dicho antes sobre dimensionamiento térmico de auto-transformadores de arranque, y por motivos de facilidad de instalación y de

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 80/343
LOS MODOS DE ARRANQUE CONVENCIONALES 59
Ejemplo 3.2
Transformador para arranque. Los datos principales son:
Potencia del motor (kW) 55
CalC n: 2,40
Se debe de calcular:
I¡ (A ) : 105 a
Ia I In : 6 ,5 0
U ¡(V) 380
1.° Transformador y auto transformador para 1,,/ In:
2.° Transformador y autotransformador para CjC n:
SO LUCIO N
1,90
0,90
1.0
Valor de reducción k
Valor reducido de CjC nk VA transformador kV A autotransformador
2 .°Valor de reducción k
Valor reducido de I a I I n
k VA transformador kV A autotransformador
0,290,70131
60
0,382,44168
65
Relación ü
Tensión en motor U 1"
Relación ü
Tensión en motor U 1"
0,54205
0,61233
Lo más normal es realizar el arranque con autotransformador que tengaun solo escalón y luego puentearlo, tal como se ha visto en la Figura 3.8. Sinembargo, en algunos arranques especiales se puede acudir a autotransfor-madores de dos o más escalones, aunque el mayor número de éstos aumentael coste. Sin embargo, de esta forma el arranque es más flexible. En elApéndice A.3.3 se desarrolla un ejemplo, cuyos resultados traemos aquí deforma gráfica. El motor sobre el que se aplica es de rotar en cortocircuito yde ranuras profundas y sus curvas características se indican en la Figura 3.9.
Como se ve en la Figura 3.10 y se calcula con detalle en el Apéndi-ce A.3.3, se determina la relación de transformación para el primer esca-lón, que es el que más la reduce, tomando el valor de la intensidad dearranque y conforme al Ejemplo 3.2. El motor arranca siguiendo una cur-va de par motor y de corriente en su primer tramo reducido. En cuanto al
par resistente, crece tanto (en esta aplicación tenemos un ventilador), queel par motor le supera en muy poco (punto de deslizamiento s = 0,25 pu);hay que conmutar a otro escalón del autotransformador con tensión másalta, y así idénticamente con el segundo escalón.
1.0" n~re" v c.orriente" ohtenido" se ven en la Fümra 3.10. Vemos ue la
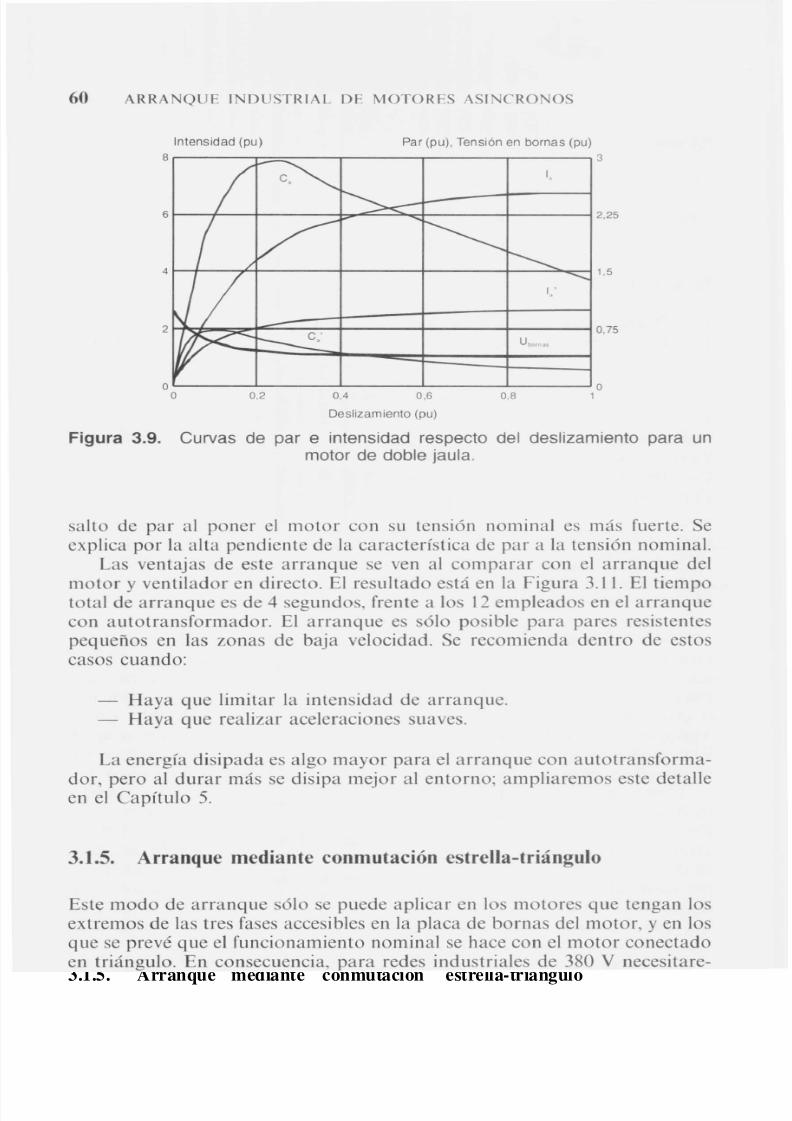
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 81/343
60 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
J.
2,25
1,5
0,75
u~ •
Par (pul. Tensión en bornas (pu)
3
4
2
6
Intensidad (pu)
8
oo 0,2 0,4 0,6 0,8
o1
Deslizamiento (pu)
Figura 3.9. Curvas de par e intensidad respecto del deslizamiento para un
motor de doble jaula.
salto de par al poner el motor con su tensión nominal es más fuerte. Seexplica por la alta pendiente de la característica de par a la tensión nominal.
Las ventajas de este arranque se ven al comparar con el arranque delmotor y ventilador en directo. El resultado está en la Figura 3.11. El tiempototal de arranque es de 4 segundos, frente a los 12 empleados en el arranquecon autotransformador. El arranque es sólo posible para pares resistentes pequeños en las zonas de baja velocidad. Se recomienda dentro de estoscasos cuando:
Haya que limitar la intensidad de arranque.Haya que realizar aceleraciones suaves.
La energía disipada es algo mayor para el arranque con autotransforma-dor, pero al durar más se disipa mejor al entorno; ampliaremos este detalleen el Capítulo 5.
3.1.5. Arranque mediante conmutación estrella-triángulo
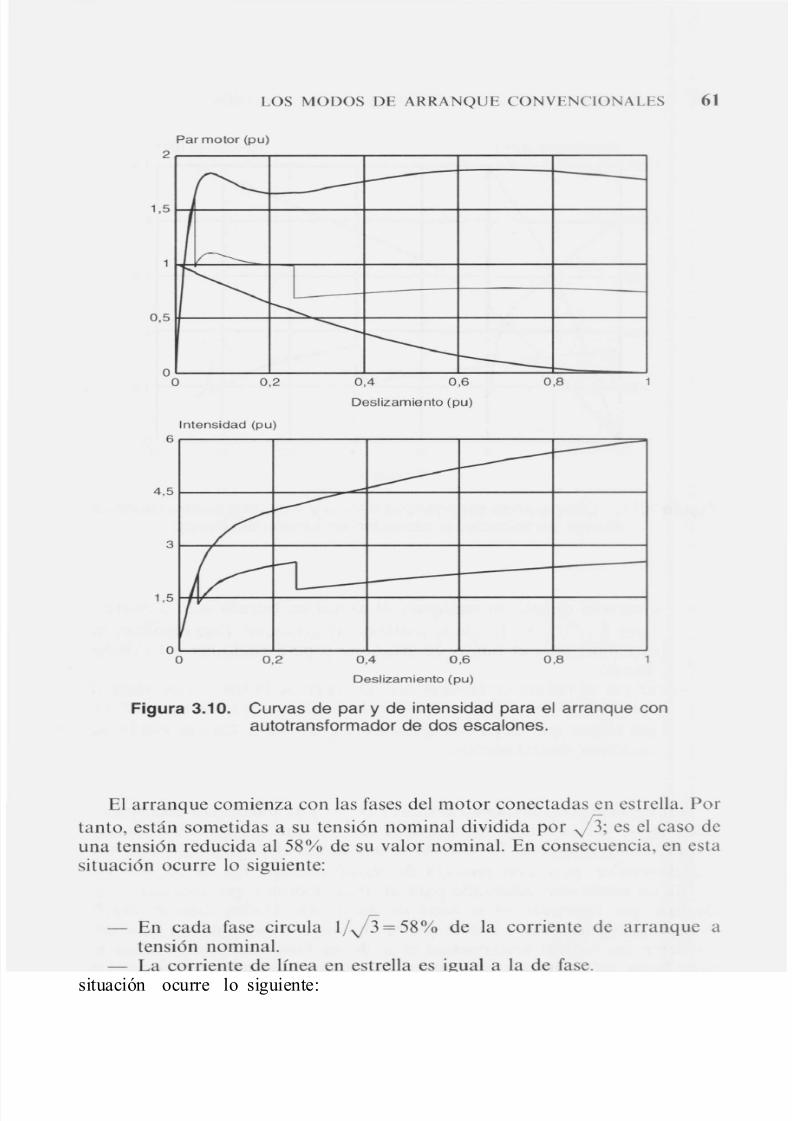
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 82/343
LOS MODOS DE ARRANQUE CONVENCIONALES 61
Par motor (pu)
2
1,5
0,5
Deslizamiento (pu)
Intensidad (pu)
6
4,5
3
1,5
oO 0,2 0,4 0,6 0,8
Deslizamiento (pu)
Figura 3.10. Curvas de par y de intensidad para el arranque conautotransformador de dos escalones.
El arranque comienza con las fases del motor conectadas en estrella. Por
tanto, están sometidas a su tensión nominal dividida por )3; es el caso deuna tensión reducida al 58% de su valor nominal. En consecuencia, en estasituación ocurre lo siguiente:
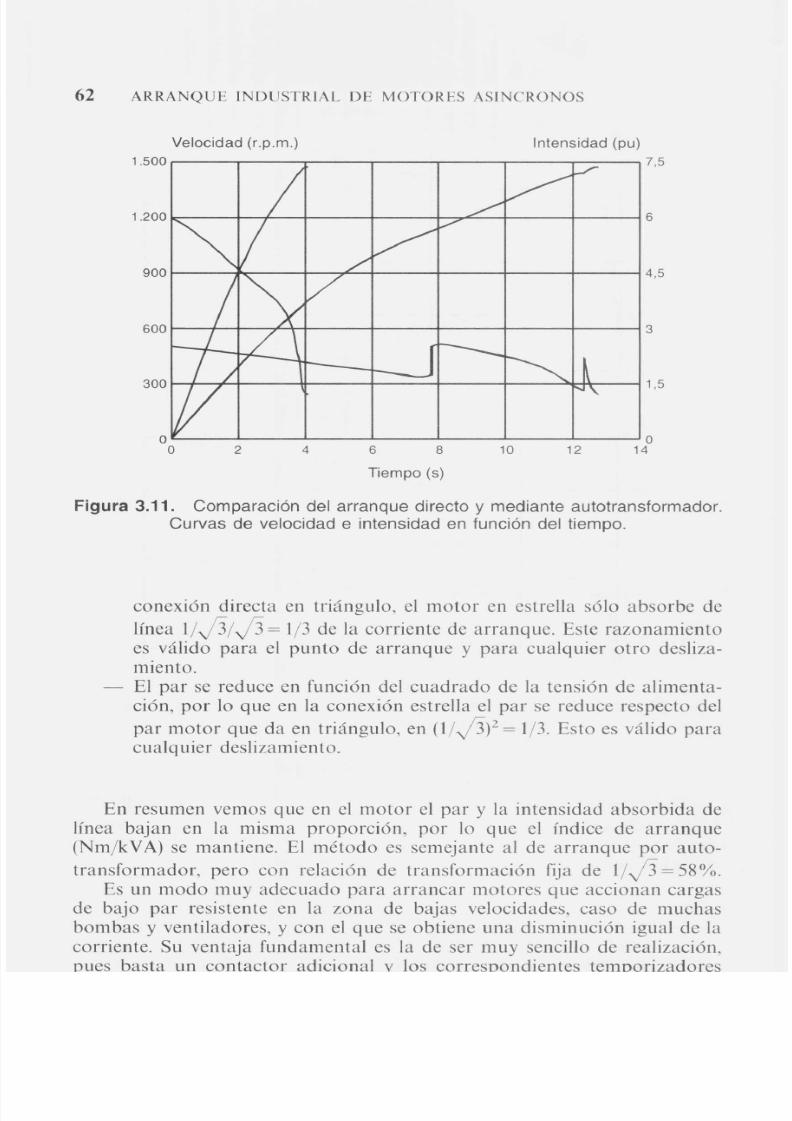
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 83/343
62 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
3
6
4,5
1,5
O1412
Intensidad (pu)
7,5
108642o
O
300
600
900
Velocidad (r.p.m.)
1.500
1.200
Tiempo (s)
Figura 3.11. Comparación del arranque directo y mediante autotransformador.Curvas de velocidad e intensidad en función del tiempo.
conexión directa en triángulo, el motor en estrella sólo absorbe de
línea I/~/~ = 1/3 de la corriente de arranque. Este razonamientoes válido para el punto de arranque y para cualquier otro desliza-miento.
- El par se reduce en [unción del cuadrado de la tensión de alimenta-ción, por lo que en la conexión estrella el par se reduce respecto del
par motor que da en triángulo, en (1/~)2 = 1/3. Esto es válido paracualquier deslizamiento.
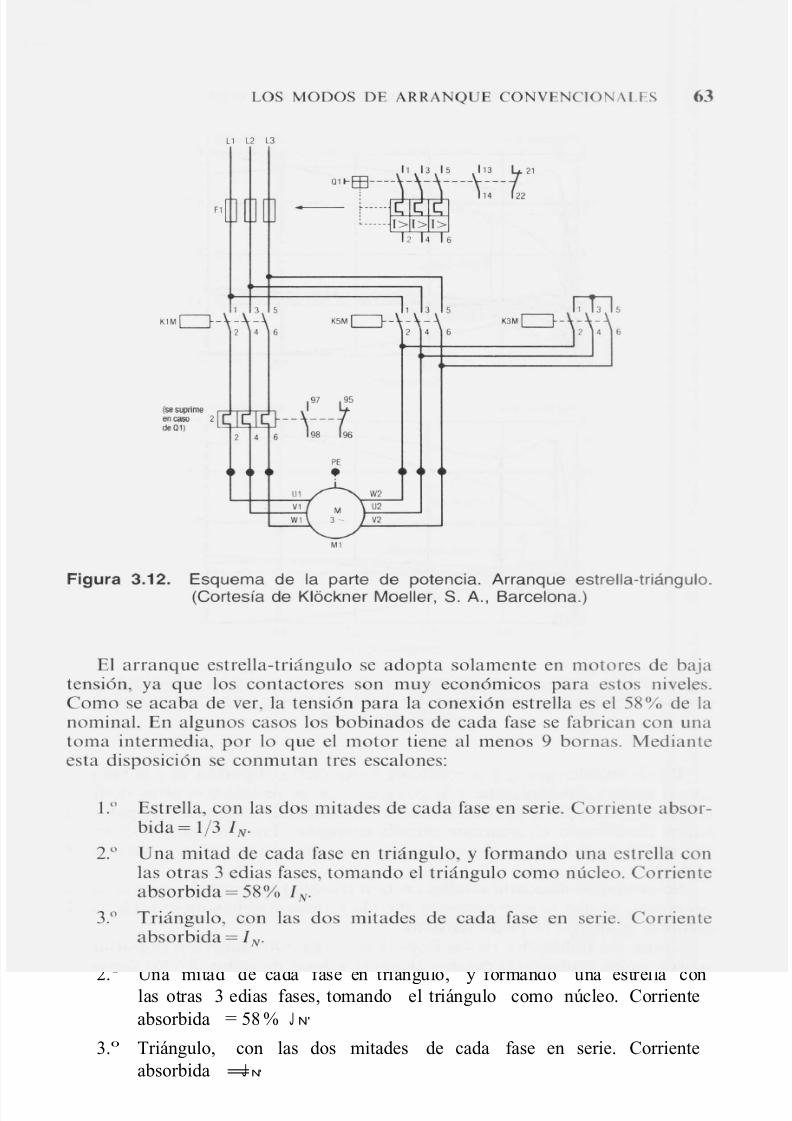
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 84/343
LOS MODOS DE ARRANQUE CONVENCIONALES 63
11 L2 L3
(se su p r im een ca s o<leal)
1 3 5
2 4
K5 M c : : : : : J - -
P E
•
1 3 5
2 4 6
M l
Figura 3.12. Esquema de la parte de potencia. Arranque estrella-triángulo.(Cortesía de Klóckner Moeller, S. A., Barcelona.)
El arranque estrella-triángulo se adopta solamente en motores de baja
tensión, ya que los contactores son muy económicos para estos niveles.Como se acaba de ver, la tensión para la conexión estrella es el 58% de lanominal. En algunos casos los bobinados de cada fase se fabrican con unatoma intermedia, por lo que el motor tiene al menos 9 bornas. Medianteesta disposición se conmutan tres escalones:
1.0 Estrella, con las dos mitades de cada fase en serie. Corriente absor- bida = 1/3 J N'
2.0
Una mitad de cada fase en triángulo, y formando una estrella conlas otras 3 edias fases, tomando el triángulo como núcleo. Corrienteabsorbida = 58 % J N'
3.0 Triángulo, con las dos mitades de cada fase en serie. Corrienteabsorbida =J N'
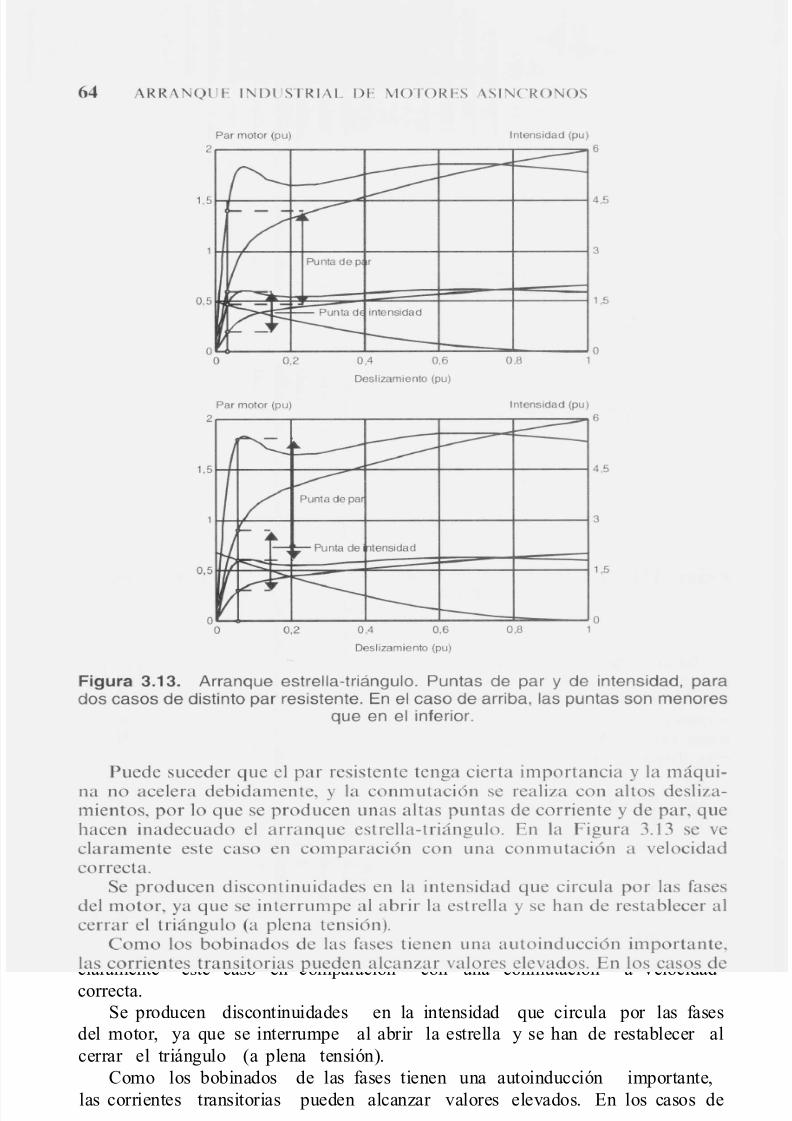
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 85/343
64 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Par motor (pu)
2
1,5
0,5
Punta de p r
Punta d intensidad
Intensidad (pu)
6
4,5
3
1,5
° ° 0,2 0,4 0,6 0,8 °1
Par motor (pu)
2
Deslizamiento (pu)
Intensidad (pu)
6
4,5
3
1,5
° ° 0,2 0,4 0,6 0,8 °1
Deslizamiento (pu)
Figura 3.13. Arranque estrella-triángulo, Puntas de par y de intensidad, parados casos de distinto par resistente. En el caso de arriba, las puntas son menores
que en el inferior.
Puede suceder que el par resistente tenga cierta importancia y la máqui-na no acelera debidamente, y la conmutación se realiza con altos desliza-mientas, por lo que se producen unas altas puntas de corriente y de par, quehacen inadecuado el arranque estrella-triángulo. En la Figura 3.13 se ve
claramente este caso en comparación con una conmutación a velocidadcorrecta.Se producen discontinuidades en la intensidad que circula por las fases
del motor, ya que se interrumpe al abrir la estrella y se han de restablecer alcerrar el triángulo (a plena tensión).
Como los bobinados de las fases tienen una autoinducción importante,las corrientes transitorias pueden alcanzar valores elevados. En los casos de
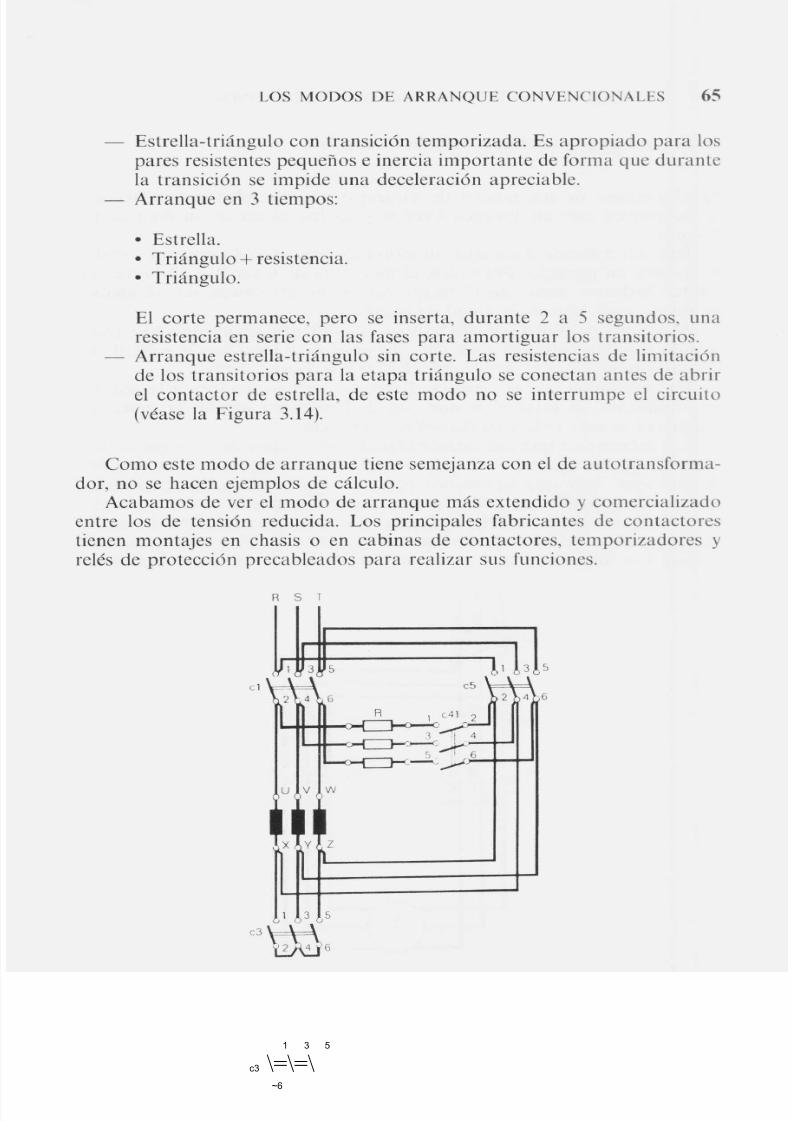
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 86/343
LOS MODOS DE ARRANQUE CONVENCIONALES 65
Estrella-triángulo con transición temporizada. Es apropiado para los pares resistentes pequeños e inercia importante de forma que durantela transición se impide una deceleración apreciable.Arranque en 3 tiempos:
• Estrella.• Triángulo + resistencia .• Triángulo.
El corte permanece, pero se inserta, durante 2 a 5 segundos, una
resistencia en serie con las fases para amortiguar los transitorios.Arranque estrella-triángulo sin corte. Las resistencias de limitaciónde los transitorios para la etapa triángulo se conectan antes de abrir el contactar de estrella, de este modo no se interrumpe el circuito(véase la Figura 3.14).
Como este modo de arranque tiene semejanza con el de autotransforma-dar, no se hacen ejemplos de cálculo.
Acabamos de ver el modo de arranque más extendido y comercializadoentre los de tensión reducida. Los principales fabricantes de contactorestienen montajes en chasis o en cabinas de contactores, temporizadores y
relés de protección precableados para realizar sus funciones.
el
1 3 5
c3 \=\=\~6
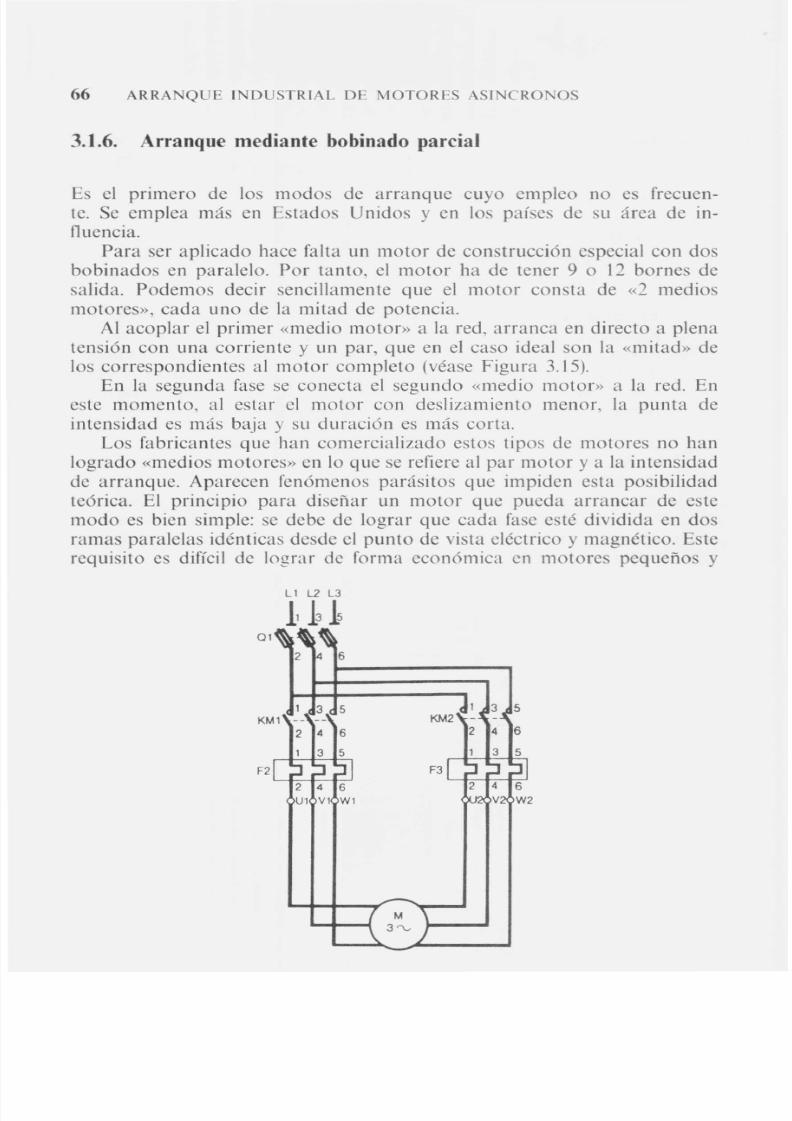
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 87/343
66 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
3.1.6. Arranque mediante bobinado parcial
Es el pnmero de los modos de arranque cuyo empleo no es frecuen-te. Se emplea más en Estados Unidos y en los países de su área de in-f1uencia.
Para ser aplicado hace falta un motor de construcción especial con dos bobinados en paralelo. Por tanto, el motor ha de tener 9 o 12 bornes desalida. Podemos decir sencillamente que el motor consta de «2 mediosmotores», cada uno de la mitad de potencia.
Al acoplar el primer «medio motor» a la red, arranca en directo a plena
tensión con una corriente y un par, que en el caso ideal son la «mitad» delos correspondientes al motor completo (véase Figura 3.15).
En la segunda fase se conecta el segundo «medio motor» a la red. Eneste momento, al estar el motor con deslizamiento menor, la punta deintensidad es más baja y su duración es más corta.
Los fabricantes que han comercializado estos tipos de motores no hanlogrado «medios motores» en lo que se refiere al par motor y a la intensidadde arranque. Aparecen fenómenos parásitos que impiden esta posibilidadteórica. El principio para diseñar un motor que pueda arrancar de estemodo es bien simple: se debe de lograr que cada fase esté dividida en dosramas paralelas idénticas desde el punto de vista eléctrico y magnético. Esterequisito es difícil de lograr de forma económica en motores pequeños y

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 88/343
LOS MODOS DE ARRANQUE CONVENCIONALES 67
medios, cuyo coste ha de ser moderado. En las referencias bibliográficas (1),(2) Y (3) se pueden ampliar detalles sobre este modo de arranque.
Desde el punto de vista de aparellaje de control, este modo de arranquenecesita un contactar adicional con las protecciones correspondientes.
3.1.7. Arranque con el motor de varias velocidades
En el Apartado 2.4 hemos visto que la energía disipada en el rotar duranteel arranque asciende a:
1. Qo
2• J2
en el caso ideal de par resistente Cr = O.Esta energía es tomada de la red por el motor. Además, las partes
giratorias del accionamiento completo almacenan la energía cinética:
1 2- . Q .J2 o
En esta hipótesis de par resistente nulo el motor no realiza trabajo útilsobre la máquina accionada durante esta fase de arranque. Entonces laenergía total tomada de la red es:
La energía cinética no se disipa en calor, y mientras el accionamientoestá girando está almacenada en la inercia y teóricamente es disponible.Sin embargo, su aprovechamiento es cuestionable a efectos prácticos.Además, en cuanto frenamos el motor se disipa en el freno mecánico o eléc-trico.
Sin embargo, sólo nos referiremos a la componente W r
. Para el estudiode este método de arranque vamos a suponer, para simplificar, que el motor es sólo de dos velocidades, que están en la relación 1 a 2; es decir:
Q/2 Y Q

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 89/343
68 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
El accionamiento arranca en dos etapas:
Etapa l. a Desde O hasta 0./2Etapa 2.a Desde 0./2 hasta 0.
y calcularemos la energía rotórica que disipa en ambas etapas:
- Etapa 1." Desde el deslizamiento s = 1 hasta s = O , pues el motor estáen el bobinado de baja velocidad 0.
0= 0./2:
W,' = 0.0
2• J -[ S2
2
] ~ = (0./2f . J . (1/2 - O) = J .0.2
/8
- Etapa 2.a Desde el deslizamiento s= 1/2 hasta s=O, pues el motor está en el bobinado de alta velocidad 0.
0= 0.:
W," = 0.,/. J - [ s ; ] ~/2 = 0.2. J . (1/8 - O) = J. 0.2/8
Si ahora sumamos ambas partes de la energía perdida en el rotor tenemos:
W r = W ,' + W ," = J .0.2/8 + J .0.2/8 = J .0.2/4
Observamos que mediante esta transición por el bobinado de veloci-dad mitad con 2p polos y pasando a continuación al de alta veloci-dad de p polos, sólo se disipa una energía que es justamente la mitadde la que se hubiera dado en un arranque en un motor con lavelocidad alta exclusivamente.
En consecuencia, el ahorro energético es:
J.0.2/4
por cada maniobra de arranque realizada.Estos motores de dos velocidades no son mucho más caros que
los motores normalizados de una velocidad, y la maniobra sólorequiere un contactor adicional y alguna pequeña ampliación en losdispositivos de la cadena de automatismo y de control. Se empleanen ascensores y valen para el frenado.
3.1.8. Arranque con motor auxiliar
Es otro de los modos especiales de arranque, y sólo se ha empleado paramotores muy grandes. Se dispone acoplado mecánicamente al motor princi-
pal un motor de rotor bobinado con 2 polos menos que aquél. Este motor se diseña de forma especial en los siguientes aspectos:
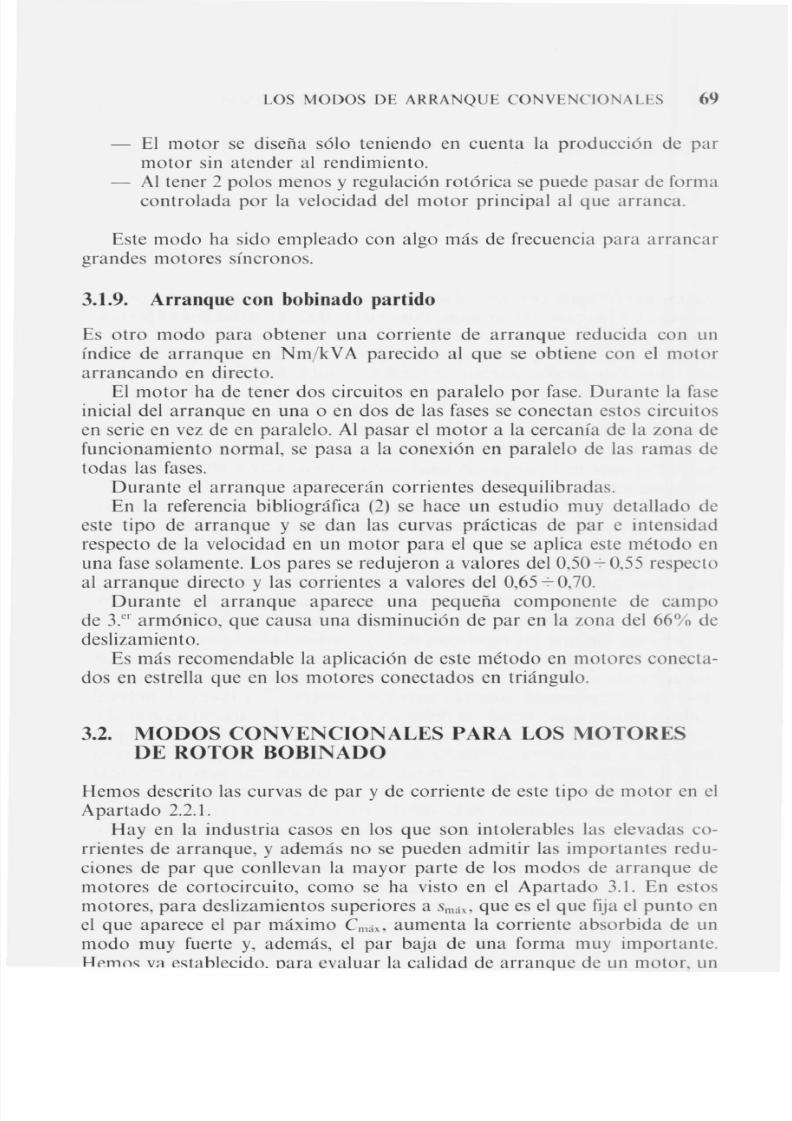
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 90/343
LOS MODOS DE ARRANQUE CONVENCIONALES 69
El motor se diseña sólo teniendo en cuenta la producción de par motor sin atender al rendimiento.Al tener 2 polos menos y regulación rotórica se puede pasar de formacontrolada por la velocidad del motor principal al que arranca.
Este modo ha sido empleado con algo más de frecuencia para arrancar grandes motores síncronos.
3.1.9. Arranque con bobinado partido
Es otro modo para obtener una corriente de arranque reducida con uníndice de arranque en Nm/kY A parecido al que se obtiene con el motor arrancando en directo.
El motor ha de tener dos circuitos en paralelo por fase. Durante la faseinicial del arranque en una o en dos de las fases se conectan estos circuitosen serie en vez de en paralelo. Al pasar el motor a la cercanía de la zona defuncionamiento normal, se pasa a la conexión en paralelo de las ramas detodas las fases.
Durante el arranque aparecerán corrientes desequilibradas.En la referencia bibliográfica (2) se hace un estudio muy detallado de
este tipo de arranque y se dan las curvas prácticas de par e intensidadrespecto de la velocidad en un motor para el que se aplica este método enuna fase solamente. Los pares se redujeron a valores del 0,50 --'--0,55 respectoal arranque directo y las corrientes a valores del 0,65 --'--0,70.
Durante el arranque aparece una pequeña componente de campode 3.cr armónico, que causa una disminución de par en la zona del 66% dedeslizamiento.
Es más recomendable la aplicación de este método en motores conecta-dos en estrella que en los motores conectados en triángulo.
3.2. MODOS CONVENCIONALES PARA LOS MOTORESDE ROTOR BOBINADO
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 91/343
70 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Hemos visto que la situación del par máximo está dada por
Sm:h
que es una fórmula con los valores de resistencia y reactancia del circuitorotórico. En los casos de arranque duro en los que se precisa par importantesería conveniente aumentar el valor de R 2 para desplazar hasta la zona de bajas velocidades los pares máximos y, por tanto, toda la zona de los paresmás altos. Este desplazamiento es también posible hacerla en un motor decortocircuito, pero quedaría para siempre en el rotar, con lo que en laoperación del motor en régimen nominal el deslizamiento sería muy alto y, por tanto, el motor sería muy poco eficiente.
La solución es posible, sin embargo. en el motor de anillos, ya que se puede disponer una resistencia adicional para arrancar y eliminarla poste-riormente en régimen nominal.
La existencia de anillos rozantes y de un bobinado aislado en el rotar hacen que el motor sea más caro y de mantenimiento más delicado. Peroestas desventajas se ven compensadas por el hecho de que se pueden modifi-car sus características desde el exterior. Además, cuando la resistencia ex-terna insertada es mucho más grande que la propia del rotar, la energía perdida en el circuito rotórieo W r se disipa en su mayor parte en un reós-tato externo al motor que es estacionario y más fácil de refrigerar.
Además, durante los regímenes de bajas velocidades (altos deslizamien-tos) el motor es mucho más resistivo y eficaz en la producción de par parauna corriente dada, con lo que su índice de arranque, para una corriente
absorbida determinada, aumenta significativamente. Por tanto, el motor deanillos rozantes sigue siendo la única solución para los arranques con altasexigencias de par de arranque y elevada inercia. Si además la red es de pocacapacidad y no soporta corrientes de arranque fuertes, tenemos otra razón para el empleo de este tipo de motor. Actualmente hay muy pocas redesdébiles. Sin embargo, hay arranques con altos pares y con inercias impor-tantes. Podemos encontrar redes débiles en los casos de productores autó-nomos de electricidad. En algunos casos, que parecen paradójicos, un motor de anillos bien estudiado es una solución más atractiva que un motor de
cortocircuito excesivamente sobredimensionado para vencer unos requisitosduros de arranque. También en los casos de regímenes intermitentes con unalto número de arranques por hora la energía disipada en el circuito rotóri-co W r es tan grande que un reóstato con gran parte de la resistencia rotóricahace que éste absorba la mayor porción de esta energía saeándola del rotar del motor.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 92/343
LOS MODOS DE ARRANQUE CONVE CIONALES 71
3.2.1. Arranque mediante resistencia rotórica trifásica
La Figura 3.16 muestra la disposición esquemática empleada. En el estátor hay un contactor inversor para cambiar el sentido de giro.
Los contactores S I a S 4 conmutan los escalones. Sobre resistenciastrataremos en los Capítulos 7 y 9. El motor trabaja en la zona lineal de lacaracterística de par, tal como se ha visto en el Apartado 2.2.1. Esta simplifi-cación facilita notablemente los cálculos. La Figura 3.17 sirve para com- prender el fundamento de los cálculos de los escalones de resistencia.
Se cumple la siguiente ecuación:
en la que:
SN : Deslizamiento (característica natural) para el par nominal.
s' : Deslizamiento deseado.
R z
: Resistencia rotórica (característica rotórica).
R~ : Resistencia externa adicional.
Si deseamos obtener otro par diferente al nominal y expresado a travésde él mediante K . e N ' la fórmula anterior pasa a ser:
s '
De acuerdo con el esquema de la Figura 3.17, calcularemos las fórmulasque dan las resistencias adecuadas para lograr:
- El número de escalones adecuado.Mantener dentro de unos límites el salto de par al conmutar entredos escalones sucesivos.
Contactor

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 93/343
72 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Escalones sucesivos
42 32 22 12
Par maxlmo C~•.=KC
Pare
d
P ar n o mi n al C. •
"O'
'" '·1 3
: ª .~.~ 'E ,
'"':' .;;;Q) ,
O
Deslizamiento (pu)
Figura 3.17. Características de par con resistencias escalonadas.
Este esquema de la Figura 3.17 vale para calcular las resistencias dearranque con las condiciones siguientes:
Obtener un número prescrito de escalones.Mantener dentro de unas especificaciones el salto de par al conmutar de un escalón a otro.
Las designaciones empleadas en las fórmulas son:
eK·e
SN
: Par motor durante el arranque (pu).
: Par máximo durante el arranque, determina la oscilación.
: Número de escalones.
: Par nominal (pu).
: Deslizamiento nominal (pu).
: Deslizamiento inicial (pu).
: Deslizamientos sucesivos.
: Deslizamiento sobre la curva de par natural.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 94/343
RI /R=21,38 R2 /R= 11,02
R3 /R = 5,45 R4 /R = 2,47 Rs/ R = 0,86
LOS MODOS DE ARRANQUE CONVENCIONALES 73
Las fórmulas que se obtienen son:
S I = so /K
S 2 = s l /K = S o iK 2
S = S /K ( " e s c+ 1)
" o
S N = S , , · C N /C
K = [S oiS N ]( I / (ne sc+ 1))
ClcN
log ( s o is N ) - log (C lC N )l 1
esc = = - - - -- - -- -
log K
R I /R = S l /S N - 1
R2 /R = S 2 / S " - 1
Con el ejemplo que sigue aclaramos el método de cálculo.
Ejemplo 3.3
Un motor de anillos se va a arrancar con un par C/CN(pu) 1,20Deslizamiento inicial So 1,00 Deslizamiento nominal 0,02Oscilación tolerada de par K = 2,00
Se pide calcular número de escalones, deslizamientos al conmutar cadaescalón y relación de resistencias adicionales respecto de la propia del rotor del motor.
SOLUCION
N.O escalones 4,38
Tomamos 5 escalones, con lo que la oscilación es de 1,86
So = 1,0000
SI =0,5371S2 = 0,2884S3 = 0,1549S4 =0,0832
Ss = 0,0447s,,=0,0240
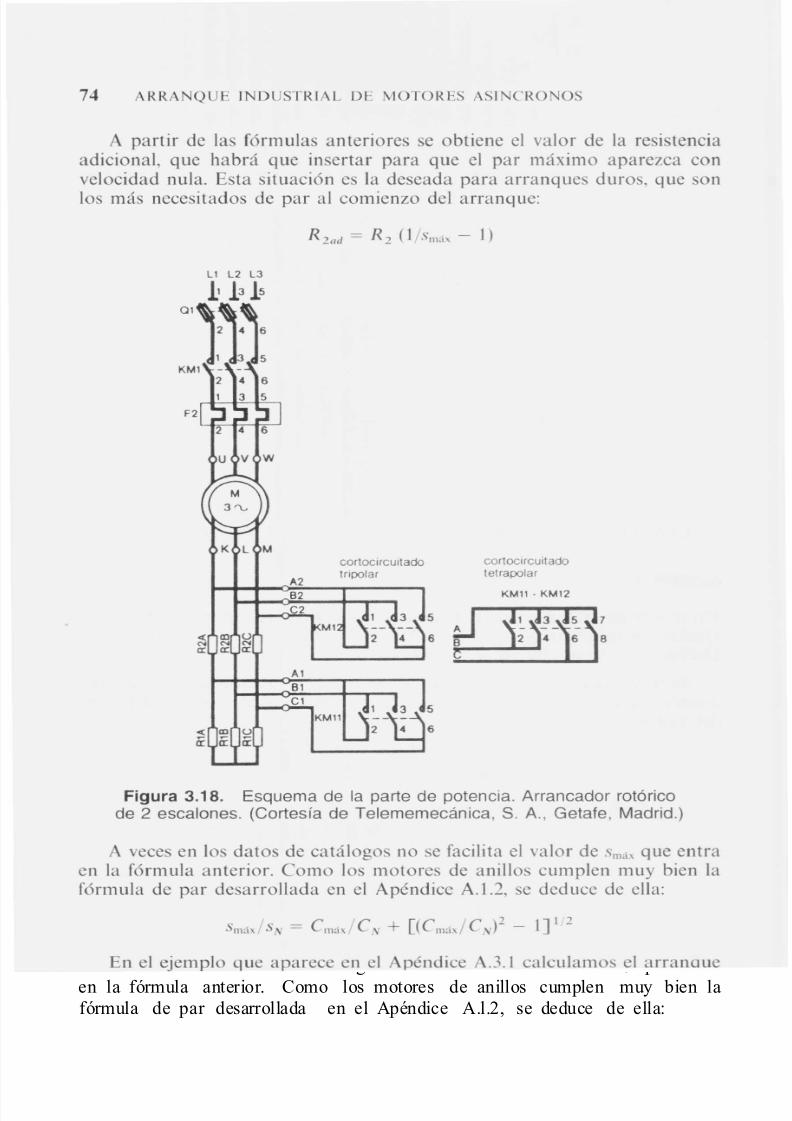
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 95/343
74 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
A partir de las fórmulas anteriores se obtiene el valor de la resistenciaadicional, que habrá que insertar para que el par máximo aparezca convelocidad nula. Esta situación es la deseada para arranques duros, que sonlos más necesitados de par al comienzo del arranque:
R 2(1(/ = R 2 (1 /Sma\ - 1)
K L M
cortoclrcUltado cortoclrcultado
A2 tripolar tetrapolar
B2 KM11· KM12
C25 ~~rl~ti:« ID u 6
N N N
a: a: a:
Al
BlCl
« ID ué l: é l : é l :
Figura 3.18. Esquema de la parte de potencia. Arrancador rotórico
de 2 escalones. (Cortesía de Telememecánica, S. A., Getafe, Madrid.)
A veces en los datos de catálogos no se facilita el valor de Sma, que entraen la fórmula anterior. Como los motores de anillos cumplen muy bien lafórmula de par desarrollada en el Apéndice A.l.2, se deduce de ella:
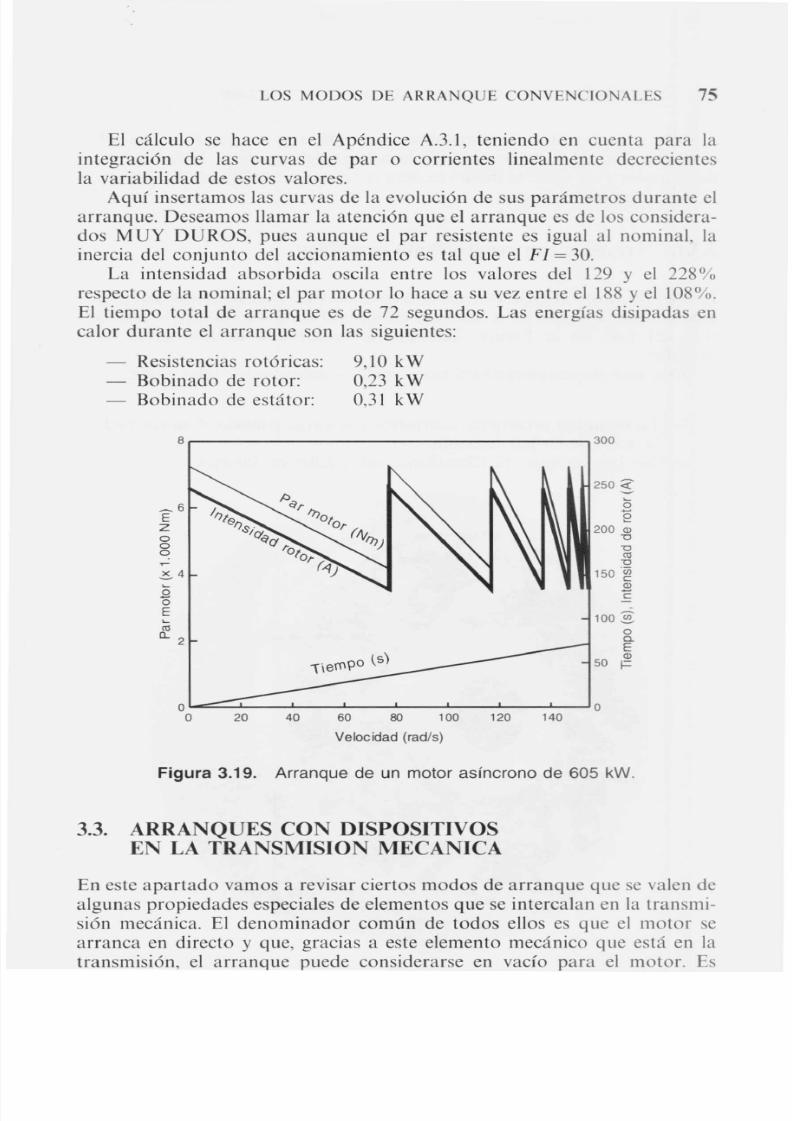
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 96/343
LOS MODOS DE ARRANQUE CONVENCIONALES 7S
El cálculo se hace en el Apéndice A.3.1, teniendo en cuenta para laintegración de las curvas de par o corrientes linealmente decrecientesla variabilidad de estos valores.
Aquí insertamos las curvas de la evolución de sus parámetros durante elarranque. Deseamos llamar la atención que el arranque es de los considera-dos MUY DUROS, pues aunque el par resistente es igual al nominal, lainercia del conjunto del accionamiento es tal que el F 1 = 30.
La intensidad absorbida oscila entre los valores del 129 y el 228%respecto de la nominal; el par motor lo hace a su vez entre el 188 yel 108%.El tiempo total de arranque es de 72 segundos. Las energías disipadas encalor durante el arranque son las siguientes:
Resistencias rotóricas:Bobinado de rotor:Bobinado de estátor:
8
9,10 kW
0,23 kW0,31 kW
300
~6
Ezooo
. 9oE
C ll
a .. 2
oO 20 40 60 80 100
Velocidad (rad/s)
120 140
250 ~
. 9e200 al
"O
"OC ll
"O
150 .~
2e
100 : § :Oa.Eal
50 F
O
Figura 3.19. Arranque de un motor asíncrono de 605 kW.
3.3. ARRANQUES CON DISPOSITIVOSEN LA TRANSMISION MECANICA
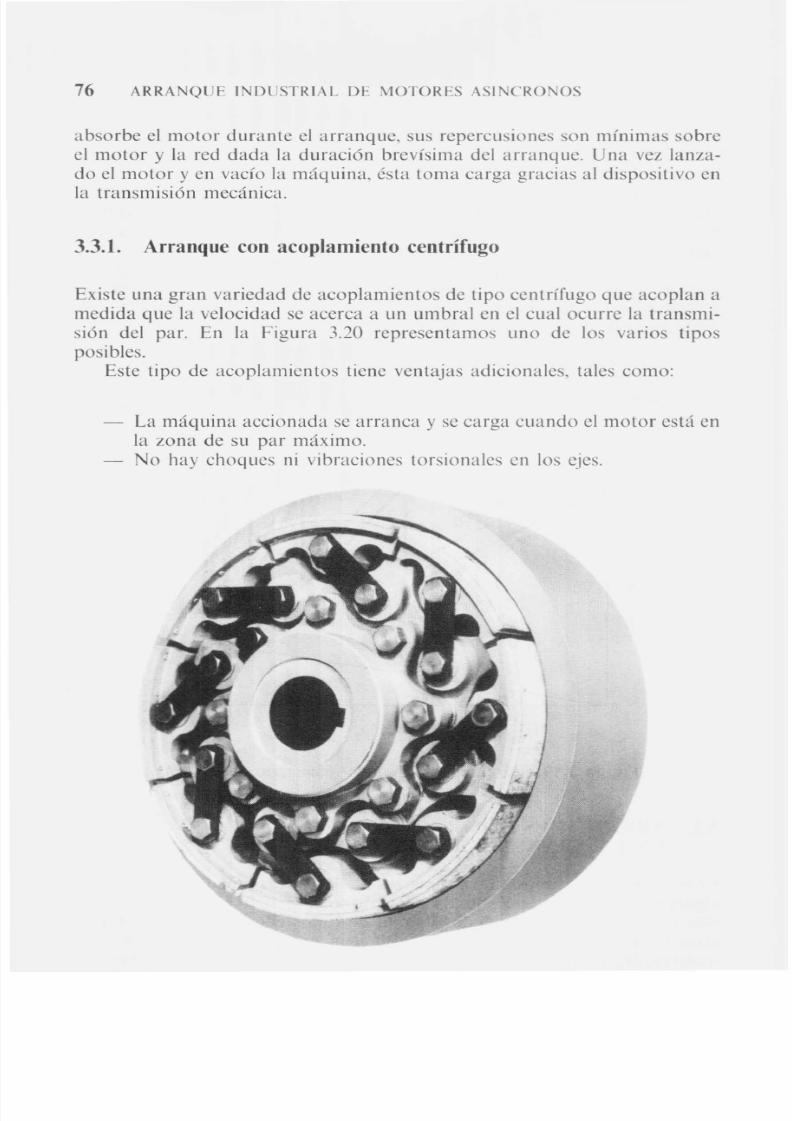
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 97/343
76 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
absorbe el motor durante el arranque, sus repercusiones son mínimas sobreel motor y la red dada la duración brevísima del arranque. Una vez lanza-
do el motor y en vacío la máquina, ésta toma carga gracias al dispositivo enla transmisión mecánica.
3.3.1. Arranque con acoplamiento centrífugo
Existe una gran variedad de acoplamientos de tipo centrífugo que acoplan amedida que la velocidad se acerca a un umbral en el cual ocurre la transmi-sión del par. En la Figura 3.20 representamos uno de los varios tipos posibles.
Este tipo de acoplamientos tiene ventajas adicionales, tales como:
La máquina accionada se arranca y se carga cuando el motor está enla zona de su par máximo.
No hay choques ni vibraciones torsionales en los ejes.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 98/343
LOS MODOS DE ARRANQUE CONVENCIONALES 77
Buen comportamiento ante atascos y sobrecargas.Prácticamente sin pérdidas en servicio nominal, ya que acoplado notiene deslizamiento.Autocontrolable, no necesita subsistemas auxiliares.
3.3.2. Arranque con acoplamiento hidráulico
El acoplamiento consta de dos elementos de paso de potencia (impulsor yrotor conducido). Ambos tienen palas radiales y están dentro de una carca-sa que contiene aceite, que es el fluido hidráulico que transmite la potencia.
El impulsor actúa como bomba centrífuga y recibe la potencia del motor deaccionamiento. Crea una corriente de fluido a presión que pasa a través delrotor conducido y lo arrastra. En la Figura 3.21 podemos ver una disposi-ción en corte.
Cuando el acoplamiento está en reposo se llena de fluido hasta un niveldeterminado. El acoplamiento no realiza una conexión rígida entre ejemotor y arrastrado. Para que haya transmisión de par tiene que haber
T APON F USiBlE,
ENTRADA
DE rUEAZA
>=>--
ACOPLAMIENTO
SALIDA
DE f UEAZ A~
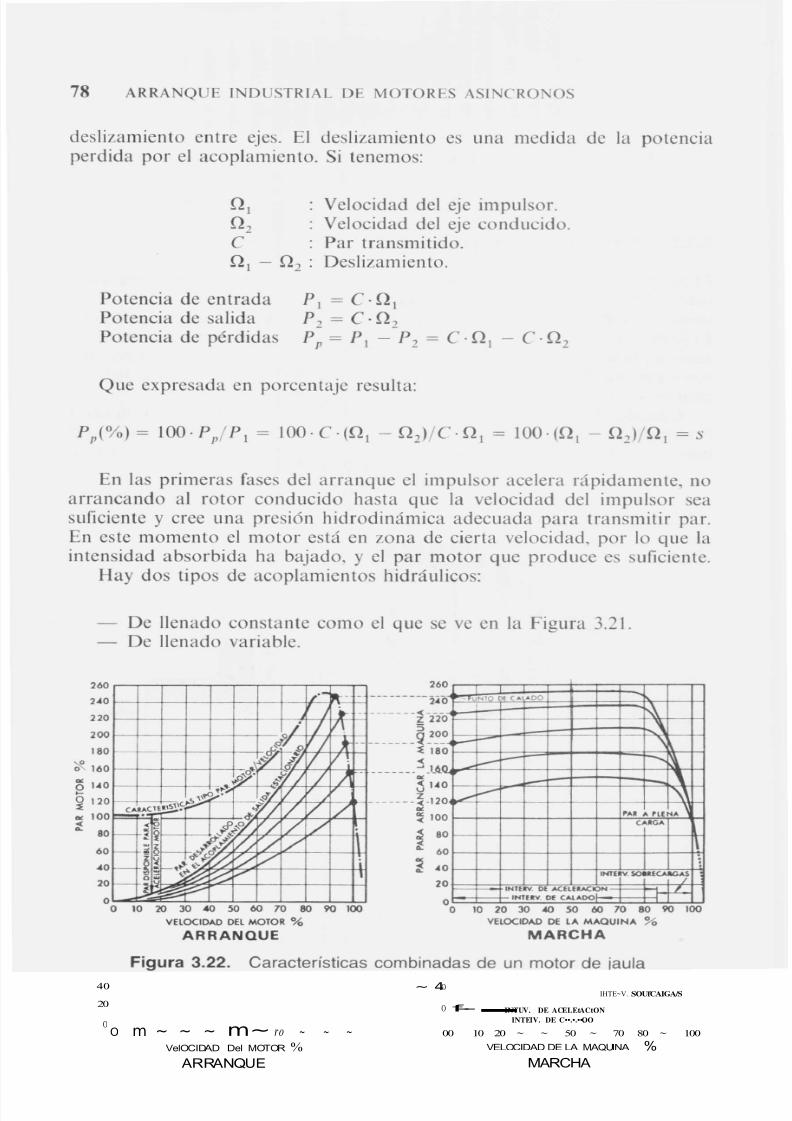
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 99/343
78 ARRA QUE INDUSTRIAL DE MOTORES ASI CRONOS
deslizamiento entre ejes. El deslizamiento es una medida de la potencia perdida por el acoplamiento. Si tenemos:
Velocidad del eje impulsor.Velocidad del eje conducido.Par transmitido.Deslizamiento.
Potencia de entradaPotencia de salida
Potencia de pérdidas
p¡ = C·QI
P2=CQ2
P p = p¡ - P2 = CQ¡ - CQ2
Que expresada en porcentaje resulta:
En las primeras fases del arranque el impulsor acelera rápidamente, noarrancando al rotor conducido hasta que la velocidad del impulsor sea
suficiente y cree una presión hidrodinámica adecuada para transmitir par.En este momento el motor está en zona de cierta velocidad, por lo que laintensidad absorbida ha bajado, y el par motor que produce es suficiente.
Hay dos tipos de acoplamientos hidráulicos:
De llenado constante como el que se ve en la Figura 3.21.De llenado variable.
00 10 20 ~ ~ 50 ~ 70 80 ~ 100
VELOCIDAD DE LA MAQUINA %
MARCHA
oo NI DE e .....'00
I
~'0
.'\. ? . . - '1O -~¡,...--
O \
. - V
"O
O r .•.• A 'lENA
(AJCA
O
O
OIHTE~V. SOUfCAIGA/S
O f---INTUV. DE ACELEtACtON
INTEIV. DE C••.•.••.OO
26- - ---------2~
- -------~--z22
:; 20
-- -------Q--::l: 18~
_______.~.tq
' " j 14
------.~-12
' "~ 10
~ 8
~ 6
~ 4
OO m ~ ~ ~ m~ ro ~ ~ ~
VelOCIDAD Del MOTOR %
ARRANQUE
60
40
20
260
240
220
200
180
~ 160
e ¡ 140
O 120: : l :
'" 100
::. 80
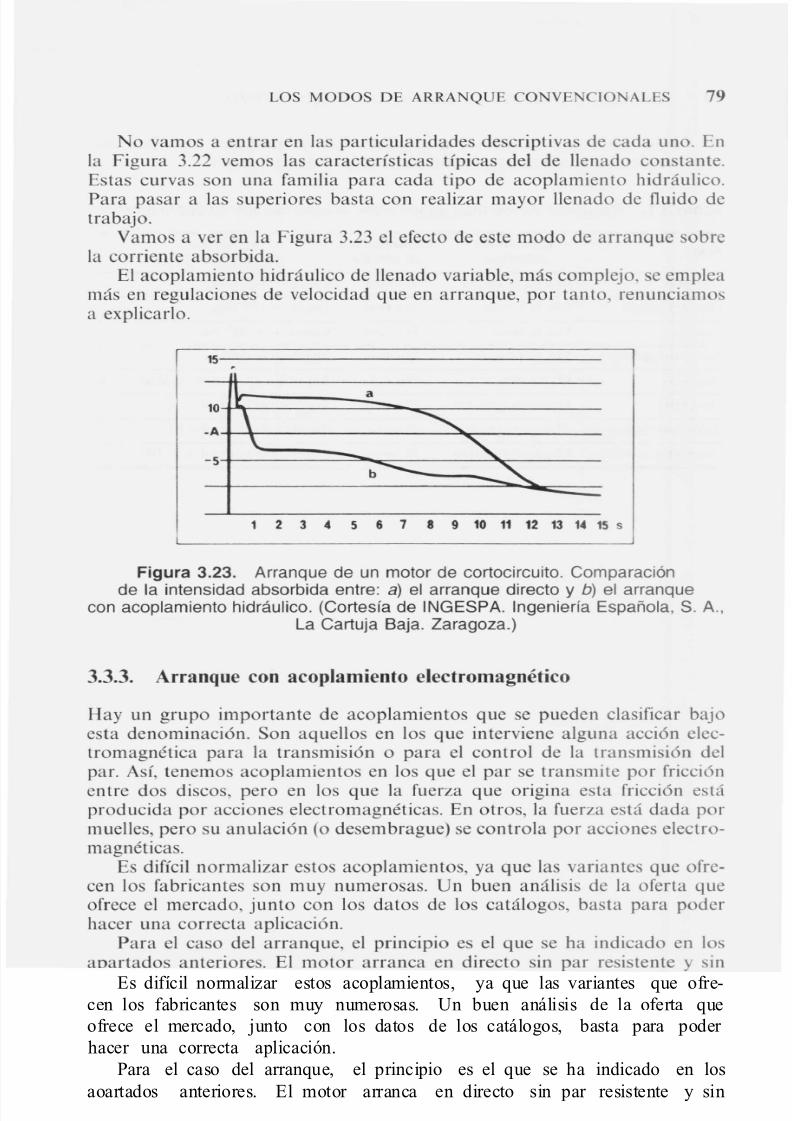
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 100/343
LOS MODOS DE ARRANQUE CONVENCIONALES 79
No vamos a entrar en las particularidades descriptivas de cada uno. Enla Figura 3.22 vemos las características típicas del de llenado constante.Estas curvas son una familia para cada tipo de acoplamiento hidráulico.Para pasar a las superiores basta con realizar mayor llenado de fluido detrabajo.
Vamos a ver en la Figura 3.23 el efecto de este modo de arranque sobrela corriente absorbida.
El acoplamiento hidráulico de llenado variable, más complejo, se empleamás en regulaciones de velocidad que en arranque, por tanto, renunciamosa explicarlo.
a
b
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 s
Figura 3.23. Arranque de un motor de cortocircuito. Comparaciónde la intensidad absorbida entre: a) el arranque directo y b) el arranque
con acoplamiento hidráulico. (Cortesía de INGESPA. Ingeniería Española, S. A.,La Cartuja Baja. Zaragoza.)
3.3.3. Arranque con acoplamiento electromagnético
Hay un grupo importante de acoplamientos que se pueden clasificar bajoesta denominación. Son aquellos en los que interviene alguna acción elec-tromagnética para la transmisión o para el control de la transmisión del par. Así, tenemos acoplamientos en los que el par se transmite por fricciónentre dos discos, pero en los que la fuerza que origina esta fricción está producida por acciones electromagnéticas. En otros, la fuerza está dada por muelles, pero su anulación (o desembrague) se controla por acciones electro-magnéticas.
Es difícil normalizar estos acoplamientos, ya que las variantes que ofre-cen los fabricantes son muy numerosas. Un buen análisis de la oferta queofrece el mercado, junto con los datos de los catálogos, basta para poder hacer una correcta aplicación.
Para el caso del arranque, el principio es el que se ha indicado en losaoartados anteriores. El motor arranca en directo sin par resistente y sin
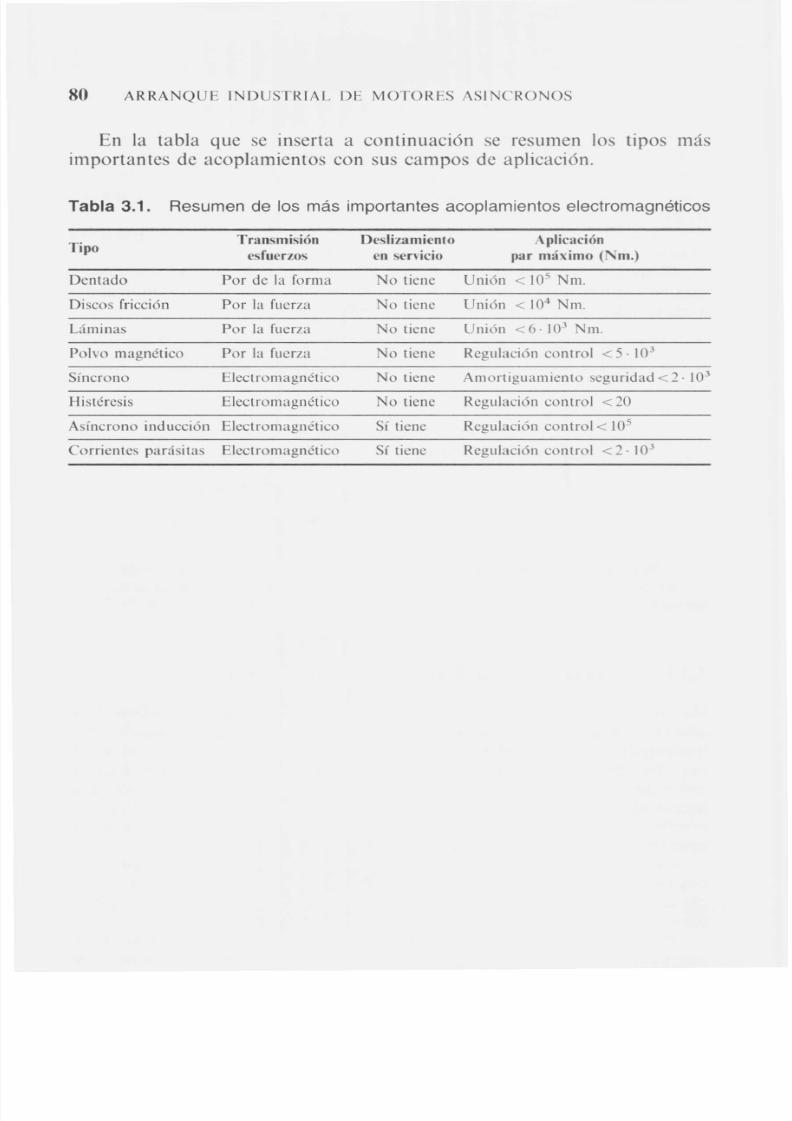
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 101/343
80 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
En la tabla que se inserta a continuación se resumen los tipos másimportantes de acoplamientos con sus campos de aplicación.
Tabla 3.1. Resumen de los más importantes acoplamientos electromagnéticos
Tipo
Dentado
Transmisiónesfuerzos
Por de la forma
Deslizamiento Aplicaciónen servicio par máximo (Nm.)
No tiene Unión <105 Nm.
Asíncrono inducción Electromagnético
Corrientes parásitas Electromagnético
Discos fricción
Láminas
Polvo magnético
Síncrono
Histéresis
Por la fuerza
Por la fuerza
Por la fuerza
Elect romagnét ico
Electromagnético
No tiene
No tiene
Sí tiene
Sí tiene
Unión < 104 Nm.
Unión <6.103 Nm.
Regulación control <5· 103
Amortiguamiento seguridad <2· 103
Regulación control <20
Regulación control < 105
Regulación control <2· 103
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 102/343
CAPITULO
CUATRO
ARRANCADO RES ESTATICOS
La aparición y abaratamiento relativo de los semiconductores de potencia, junto con la posibilidad de preparar algoritmos de control sofisticado en los
modernos microprocesadores, han hecho que la electrónica de estado sólido permita realizar convertidores. Estos convertidores no tienen componentesen movimiento, por lo que se les denomina también convertidores estáticos.
En el área de arranque de motores asíncronos se emplean los siguientesconvertidores electrónicos a base de semiconductores de potencia:
Arrancadores estáticos, llamados también arrancadores suaves.Equipos para insertar de modo pulsante la resistencia rotórica adi-cional de los motores de anillos.
De las dos aplicaciones que se acaban de citar, la primera es con muchola más extendida, y a ella dedicaremos la mayor parte de este capítulo. Lasegunda se emplea muy poco, dado el uso cada día más restringido de losmotores de rotor bobinado. Finalmente, indicamos que también se usa elconvertidor de frecuencia, pero su justificación se hace por la función deregulación de velocidad, siendo la posibilidad de arranque una prestaciónadicional.
4.1. ARRANQUE MEDIANTE ARRANCADOR ESTATICO(ARRANCADOR SUAVE)
Los sistemas que hemos descrito hasta ahora para motores de rotor encortocircuito dan como resultado unas intensidades muy superiores a la

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 103/343
82 ARRANQUE IND STRIAL DE MOTORES AS1NCRONOS
los motores asíncronos de rotor en cortocircuito y a algunos motores sín-
cronos cuando arrancan de modo asíncrono.U n sistema correcto de arranque ha de conseguir que la intensidadabsorbida sea la precisa para vencer al par resistente y producir un excesode par acelerador capaz de vencer a la inercia del motor más su máquinaaccionada en el tiempo requerido. Así, en accionamientos de bombas yventiladores, el par de arranque crece con el cuadrado de la velocidad, por lo que en las primeras fases del proceso de arranquc sobra par motor y sería
posible arrancar con valores menores de la intensidad absorbida.Esta reducción de la intensidad evita esfuerzos y caídas de tensión en los
transformadores y en las líneas de alimentación de los motores, consiguien-do mejorar la calidad del servicio cn la instalación del usuario y en la deotros que están conectados a la misma línea de alimentación.
En la Figura 4.1 se ve la disposición de principio de un arrancador estático suave. Cada línca de fase tiene dos tiristores en antiparalelo, demodo que la tensión aplicada al motor se controla variando el ángulo deconducción de los tiristores. Al comienzo, los tiristores son encendidos conlapsos muy cortos, de modo que el efecto es el de una reducción de tensiónaplicada en las bornas del motor. El motor asÍncrono modifica el par y
la corriente en función de la tensión aplicada.De este modo el par y la intensidad quedan controlados a través de la
tensión aplicada. A medida que el arranque progresa, el sistema de controlva aumentando el ángulo de conducción manteniendo la intensidad dentro
L1 L2 L3Electrónica
Consigna de
corriente
-y6-
Mando
Valor real de
corriente
Señalizaciones
Vigilancias
Ajustes
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 104/343
ARRANCADORES ESTATICOS 83
de las consignas proporcionadas por el control. Actualmente, todos los
sistemas de control se realizan a base de microprocesadores, en los que seintegran funciones de control principal y auxiliares, tales como:
- Control de intensidad.- Rampa de tensi6n aplicada.- Control de tiempo de arranque.
Optimizaci6n del factor de potencia del motor.- Optimizaci6n del rendimiento a bajas potencias.
Monitorizaci6n.- Autodiagn6stico.
En el Apéndice A.1.7 sa detalla el funcionamiento del regulador de ten-si6n alterna con control por fase, que es el nombre del circuito de potenciaformado por dos tiristores en antiparalelo por fase, que constituye el ele-mento principal del circuito de potencia. Allí veremos las posibilidades devariaci6n de tensi6n y de corriente absorbidas por la carga, en nuestro casoun motor asíncrono.
Las ondas de corriente no son senoidales y sus arm6nicos superiores producen en el motor efectos indeseables, tales como:
Pares parásitos.Pérdidas adicionales y calentamiento.Vibraciones.Ruido.
Afortunadamente estos efectos negativos quedan compensados sobrada-
mente por las ventajas del sistema. Realizaremos su descripci6n detallada enel Capítulo 5.Como ya hemos visto al variar la tensi6n aplicada en bornas del motor,
se producen los siguientes efectos:
- El par motor cambia proporcionalmente al cuadrado de la tensi6neficaz.
- La intensidad absorbida es proporcional a la tensi6n eficaz.
Este modo de arranque tiene cierta similitud con algunos de los descri-tos en el Capítulo 3, y pertenece a la categoría de los de tensi6n reducida.Guarda ciertas analogías con el modo de arranque controlado por resisten-cias en el estátor, con diferencias a favor del arrancador suave, ya que ahorala tensi6n aplicada es directamente controlable y en el modo de resistenciasla tensi6n aplicada variaba en funci6n de la corriente absorbida en cada
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 105/343
84 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La variación gradual de la tensión eficaz de salida del arrancador suave
se hace con dos criterios independientes o relacionados:
Rampa de tensión aplicada a partir de un valor mínimo.1ntensidad limitada.
Gracias a ellos obtendremos:
Control de intensidad propiamente dicho.Control dinámico de sobretensiones de forma que, al aparecer lasmismas, el sistema de control reduzca el ángulo de conducción de lostiristores con el fin que la tensión aplicada sea la de consigna.Ahorro de energía. El sistema de control puede medir el factor de potencia del motor y, en consecuencia, reduce la tensión aplicada encuanto el motor está dando potencias inferiores a la nominal. Las pérdidas magnéticas disminuyen mejorando el rendimiento. Sin em- bargo, hay que hacer un análisis correcto, pues el arrancador suaveda incrementos de pérdidas en el motor, como se acaba de indicar anteriormente.Protección térmica del motor, sus cables, del aparellaje y del propioarrancador.Protección mecánica del conjunto motor, máquina accionada, trans-misión y engranajes gracias al control de aceleración que se puedelograr.Control en la fase de frenado.
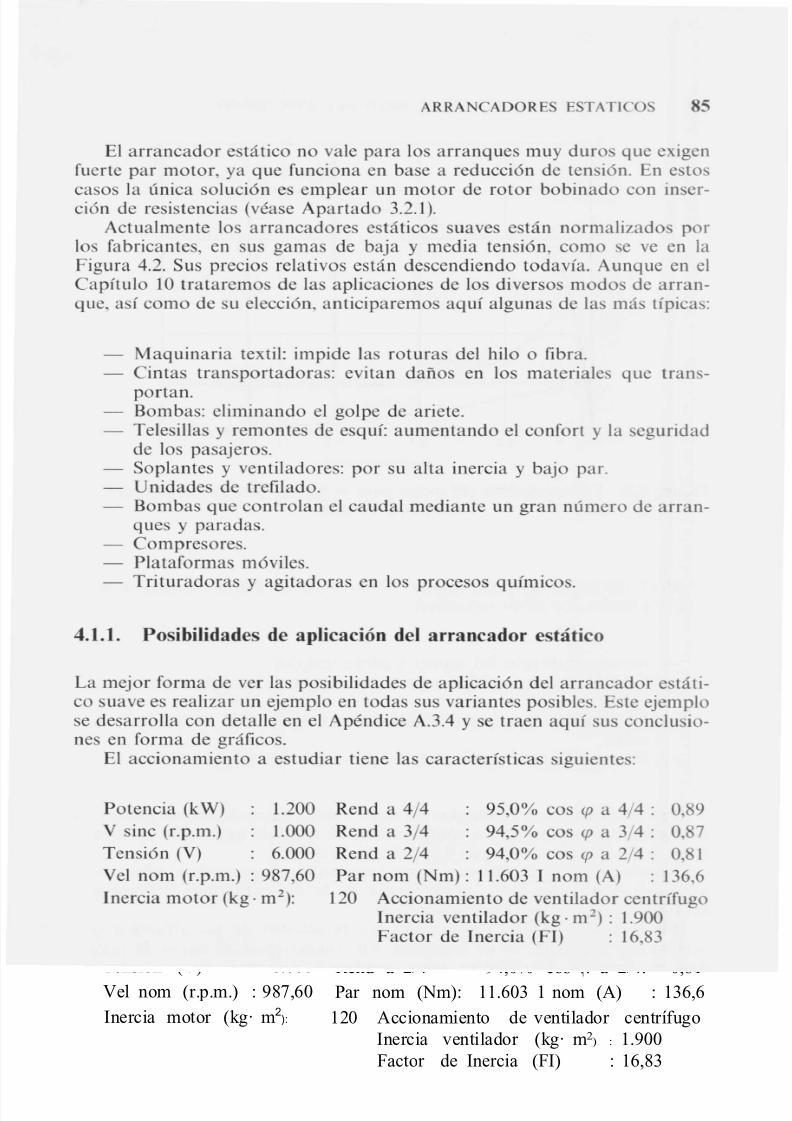
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 106/343
ARRANCADORES ESTATICOS 85
El arrancador estático no vale para los arranques muy duros que exigen
fuerte par motor, ya que funciona en base a reducción de tensión. En estoscasos la única solución es emplear un motor de rotor bobinado con inser-ción de resistencias (véase Apartado 3.2.1).
Actualmente los arrancadores estáticos suaves están normalizados por los fabricantes, en sus gamas de baja y media tensión, como se ve en laFigura 4.2. Sus precios relativos están descendiendo todavía. Aunque en elCapítulo 10 trataremos de las aplicaciones de los diversos modos de arran-que, así como de su elección, anticiparemos aquí algunas de las más típicas:
Maquinaria textil: impide las roturas del hilo o fibra.Cintas transportadoras: evitan daños en los materiales que trans- portan.Bombas: eliminando el golpe de ariete.
- Telesillas y remontes de esquí: aumentando el confort y la seguridadde los pasajeros.Soplantes y ventiladores: por su alta inercia y bajo par.
- U nidades de trefilado.- Bombas que controlan el caudal mediante un gran número de arran-
ques y paradas.- Compresores.- Plataformas móviles.- Trituradoras y agitadoras en los procesos químicos.
4.1.1. Posibilidades de aplicación del arrancador estático
La mejor forma de ver las posibilidades de aplicación del arrancador estáti-co suave es realizar un ejemplo en todas sus variantes posibles. Este ejemplose desarrolla con detalle en el Apéndice A.3.4 y se traen aquí sus conclusio-nes en forma de gráficos.
El accionamiento a estudiar tiene las características siguientes:
Potencia (kW) 1.200
V sinc (r.p.m.) 1.000
Tensión (V) 6.000
Vel nom (r.p.m.) : 987,60
Inercia motor (kg· m2):
Rend a 4/4 95,0% cos q J a 4/4: 0,89
Rend a 3/4 94,5% cos q J a 3/4: 0,87
Rend a 2/4 94,0% cos q J a 2/4: 0,81Par nom (Nm): 11.603 1 nom (A) : 136,6
120 Accionamiento de ventilador centrífugoInercia ventilador (kg· m2
) : 1.900Factor de Inercia (FI) : 16,83

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 107/343
86 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
6
Intensidad
° ° 0,2 0,4 0,6 0,8
Deslizam iento (pu)
Figura 4.3. Características del motor para el que se estudia la aplicación delarrancador estático.
Para ver todas las posibilidades del arrancador suave estudiaremos deforma sucesiva los casos siguientes:
Arranque directo del motor a plena tensión.Empleo del arrancador suave con consigna de aceleración contro-lada.Empleo del arrancador estático con consigna de intensidad cons-tante.Empleo del arrancador suave con rampa de tensión.
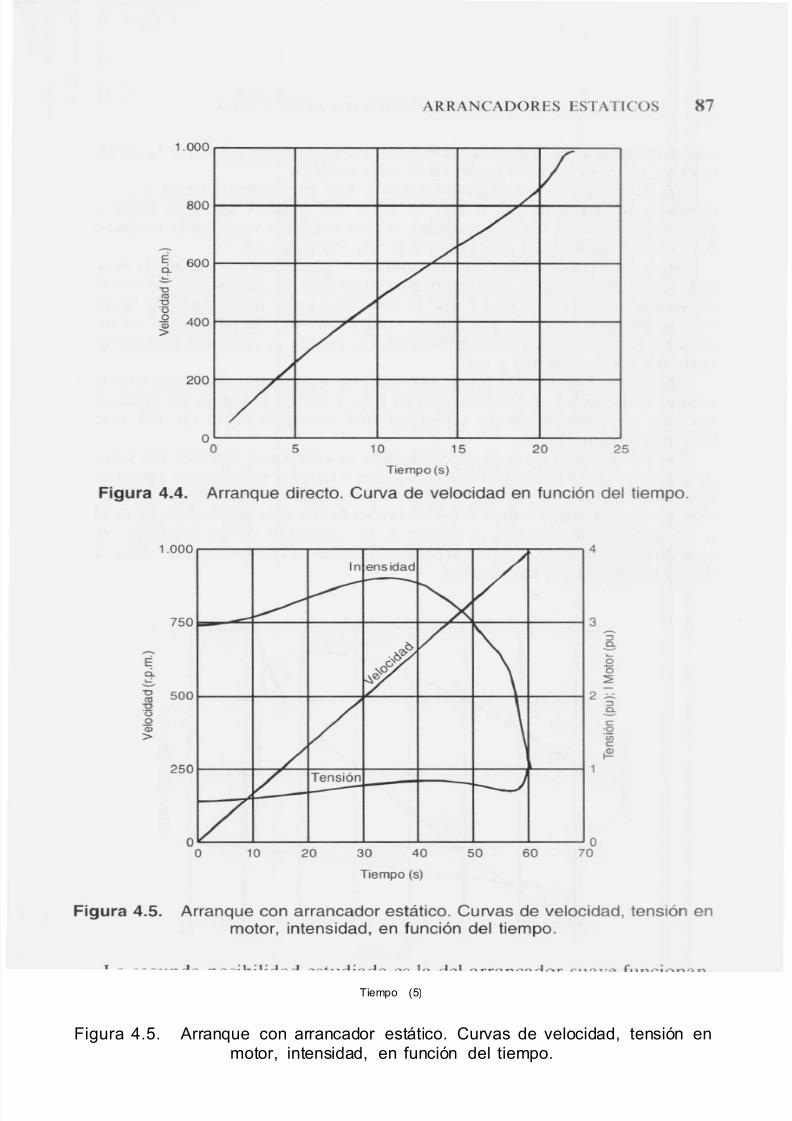
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 108/343
A RR AN CA DO RE S E ST AT IC OS 87
1.000
800
; 600
'O
' "'O'0o~ 400
200
oO 5 10 15 20 25
Tiempo (5)
Figura 4.4. Arranque directo. Curva de velocidad en función del tiempo.
3
:J. e ,. . . . . , .
~Ea.
- : : . ~
-'O 2 , ; . . : : ,
' "'O : : >
'0 . e ,o e
ID '0
> '0 0e
~
Tiempo (5)
Figura 4.5. Arranque con arrancador estático. Curvas de velocidad, tensión enmotor, intensidad, en función del tiempo.
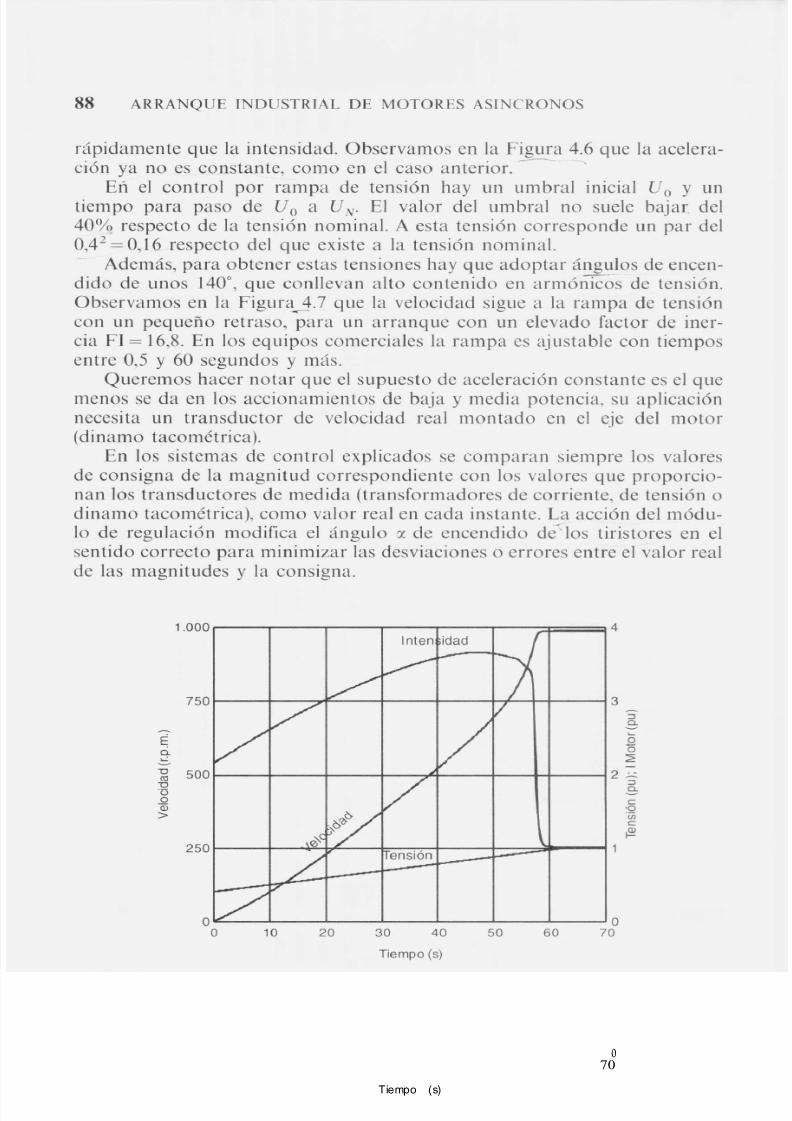
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 109/343
88 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
rápidamente que la intensidad. Observamos en la Figura 4.6 que la acelera-
ción ya no es constante, como en el caso anterior. - - ,Eñ el control por rampa de tensión hay un umbral inicial U o y untiempo para paso de U o a U N" El valor del umbral no suele bajar del40o/q respecto de la tensión nominal. A esta tensión corresponde un par del0,42 = 0,16 respecto del que existe a la tensión nominal.
Además, para obtcner estas tensiones hay que adoptar ángulos de encen-dido de unos 140°, que conllevan alto contenido en armónicos de tensión.Observamos en la Figura~j.7 que la velocidad sigue a la rampa de tensióncon un pequeño retraso, para un arranque con un elevado factor de iner-
cia FI= 16,8. En los equipos comerciales la rampa es ajustable con tiemposentre 0,5 y 60 segundos y más.Queremos hacer notar que el supuesto de aceleración constante es el que
menos se da en los accionamientos de baja y media potencia, su aplicaciónnecesita un transductor de velocidad real montado en el eje del motor (dinamo tacométrica).
En los sistemas de control explicados se comparan siempre los valoresde consigna de la magnitud correspondiente con los valores que proporcio-nan los transductores de medida (transformadores de corriente, de tensión o
dinamo tacométrica), como valor real en cada instante. La acción del módu-lo de regulación modifica el ángulo C / . de encendido de'-Ios tiristores en elsentido correcto para minimizar las desviaciones o errores entre el valor realde las magnitudes y la consigna.
4
o70
3: ; -
" ' "E oo.. (5¿ ~
-"D
2c o : ; -"D
" ' "Go e
Qi -o> " ¡ ¡ ;
e
~
Tiempo (s)
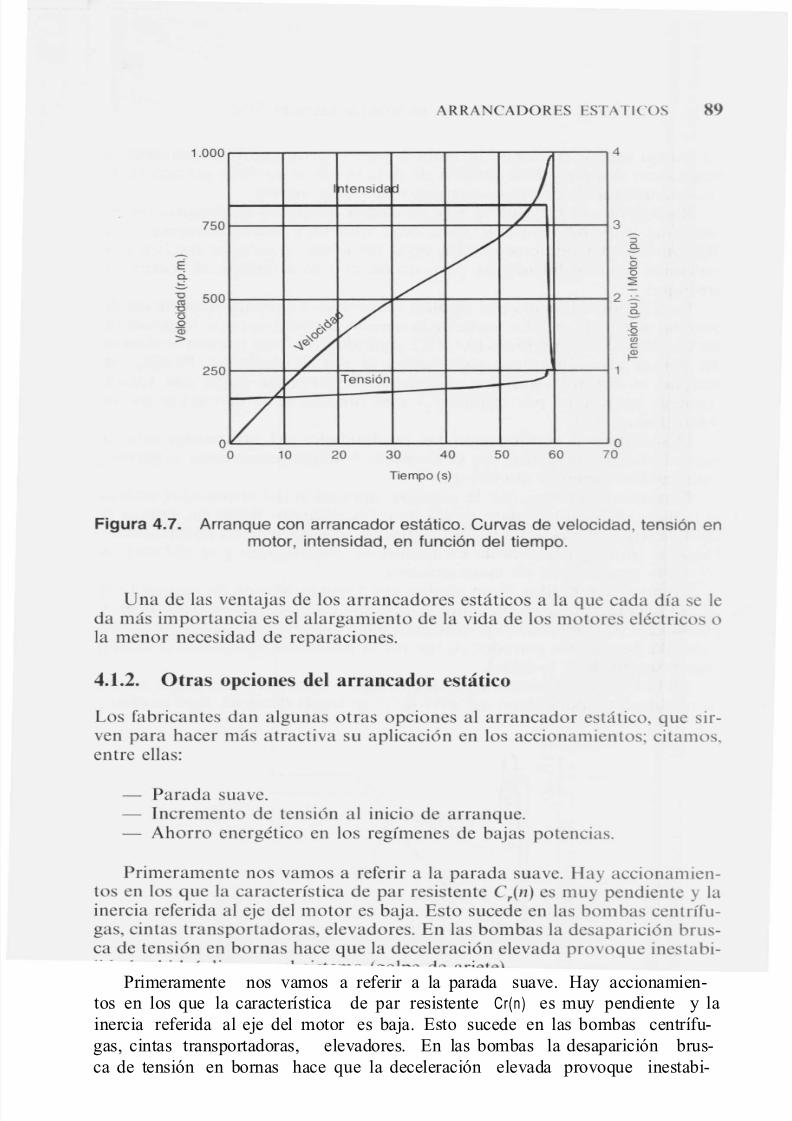
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 110/343
ARRANCADORES ESTATICOS 89
4
o70
750 3:;-s
E ~a. ~- = : -"O 500 2.:-::
' " :J"OS·0
o eQj ·0
> .¡¡;
e~
Tiempo (s)
Figura 4.7. Arranque con arrancador estático. Curvas de velocidad, tensión enmotor, intensidad, en función del tiempo.
Una de las ventajas de los arrancadores estáticos a la que cada día se leda más importancia es el alargamiento de la vida de los motores eléctricos ola menor necesidad de reparaciones.
4.1.2. Otras opciones del arrancador estático
Los fabricantes dan algunas otras opciones al arrancador estático, que sir-ven para hacer más atractiva su aplicación en los accionamientos; citamos,entre ellas:
Parada suave.Incremento de tensión al inicio de arranque.Ahorro energético en los regímenes de bajas potencias.
Primeramente nos vamos a referir a la parada suave. Hay accionamien-tos en los que la característica de par resistente Cr(n) es muy pendiente y lainercia referida al eje del motor es baja. Esto sucede en las bombas centrífu-gas, cintas transportadoras, elevadores. En las bombas la desaparición brus-ca de tensión en bornas hace que la deceleración elevada provoque inestabi-
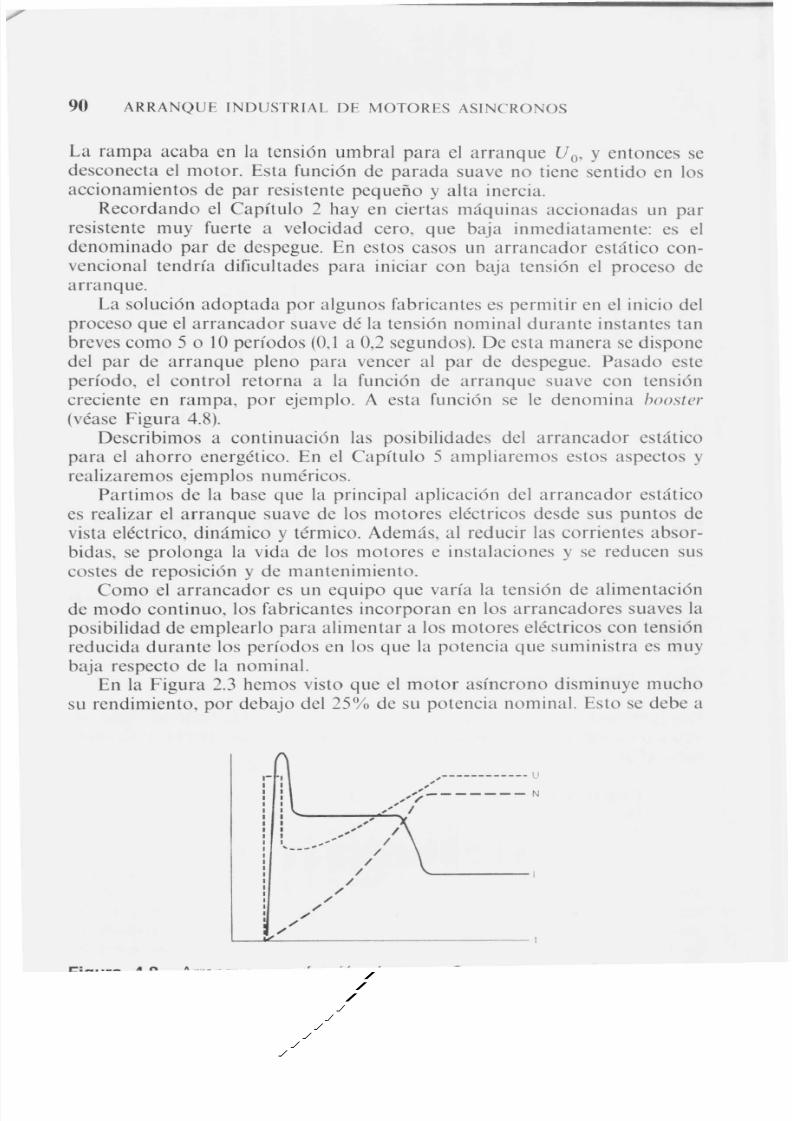
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 111/343
90 ARRANQUE INDUSTRIAL DE M OTORES ASINCRONOS
La rampa acaba en la tensión umbral para el arranque U o' y entonces se
desconecta el motor. Esta función de parada suave no tiene sentido en losaccionamientos de par resistente pequeño y alta inercia.
Recordando el Capítulo 2 hay en ciertas máquinas accionadas un par resistente muy fuerte a velocidad cero, que baja inmediatamente: es eldenominado par de despegue. En estos casos un arrancador estático con-vencional tendría dificultades para iniciar con baja tensión el proceso dearranque.
La solución adoptada por algunos fabricantes es permitir en el inicio del proceso que el arrancador suave dé la tensión nominal durante instantes tan
breves como 5 o 10 períodos (O,l a 0,2 segundos). De esta manera se disponedel par de arranque pleno para vencer al par de despegue. Pasado este período, el control retorna a la función de arranque suave con tensióncreciente en rampa, por ejemplo. A esta función se le denomina booster
(véase Figura 4.8).Describimos a continuación las posibilidades del arrancador estático
para el ahorro energético. En el Capítulo 5 ampliaremos estos aspectos yrealizaremos ejemplos numéricos.
Partimos de la base que la principal aplicación del arrancador estático
es realizar el arranque suave de los motores eléctricos desde sus puntos devista eléctrico, dinámico y térmico. Además, al reducir las corrientes absor- bidas, se prolonga la vida de los motores e instalaciones y se reducen suscostes de reposición y de mantenimiento.
Como el arrancador es un equipo que varía la tensión de alimentaciónde modo continuo, los fabricantes incorporan en los arrancadores suaves la posibilidad de emplearlo para alimentar a los motores eléctricos con tensiónreducida durante los períodos en los que la potencia que suministra es muy baja respecto de la nominal.
En la Figura 2.3 hemos visto que el motor asíncrono disminuye muchosu rendimiento, por debajo del 25% de su potencia nominal. Esto se debe a
.-.: ",'------------ II
: ",'1"------- N
I " /
: ,,': ,'/
~ - - - - - , , ' //
//
/
./././././
./
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 112/343
ARRANCADORES ESTATICOS 91
que las pérdidas magnéticas y mecánicas son fijas y dependientes del cua-
drado de la tensión de alimentación y de la velocidad, respectivamente. Elfactor de potencia disminuye mucho más acusadamente, haciéndolo ya por debajo del 50% de la potencia. Esto es debido a la intensidad magnetizan teo corriente de vacío que depende de la tensión de alimentación del motor.Por tanto, se podrá alimentar al motor con tensión reducida, siempre que el
par exigido sea mucho menor.En este caso:
Disminuyen las pérdidas magnéticas en función del cuadrado de latensión y, por tanto, mejora el rendimiento.Disminuye la intensidad de vacío o magnetizan te, algo más que la bajada de tensión (el motor está magnéticamente en la zona desaturación). En consecuencia, mejora el factor de potencia.
Estas mejoras están parcialmente anuladas por efectos de sentido opues-to, tales como:
- Esta tensión más baja hace que el deslizamiento es superior al quedebería corresponderle. Esto significa un incremento en las pérdidasJoule rotóricas.Las pérdidas Joule del estátor suben algo, pues aunque la potencia esreducida se absorbe de línea con menor tensión.El arrancador estático tiene pérdidas propias, que aunque pequeñas,han de ser consideradas.El motor sufre pérdidas eléctricas y magnéticas adicionales por estar
alimentado con tensión no senoidal.
En consecuencia, la aplicación del arrancador suave para el ahorroenergético con potencias bajas es difícil de justificar por sí sola y solamentese ve razonable si existe alguna de las circunstancias siguientes:
- Muchas horas de servicio con potencias bajas (en torno al 25%).- Cuando se necesite también la función del arranque suave.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 113/343
92 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
En la evaluación dc las ventajas energéticas hay que tener en cuenta la
mejora del factor de penalización por mejor factor de potencia. También sereduce la punta contratada.El control de los arrancadores suaves mide continuamente el factor de
potencia comparando los pasos por cero de las ondas de tensión y de in-tensidad. Mediante los algoritmos de control, busca la optimización del fac-tor de potencia adaptando la mejor tensión de entrada al motor, variando elángulo de encendido de los tiristores. Esta función, que se incluye en losequipos comerciales, no está siempre activada. En los manuales de instruc-ciones se dan indicaciones para ajustarla a los casos en los que haga falta.
Hay una posibilidad de ahorro energético para los motores grandes queaccionan cargas de alta inercia, y los cuales, sin arrancador suave, al tener arranque largo y difícil no pueden arrancar muchas veces, pues aumentansus averías. En estas circunstancias los operadores de estas instalaciones, por seguridad, mantienen los motores en vacío en vez de pararlos. Aquí sítenemos una oportunidad de ahorro energético más clara. En el Aparta-do 5.8 se hace un ejemplo para cuantificar estas ventajas, que son muchomás interesantes.
4.1.3. Instalación del arrancador estático
En lo que se refiere a la integración de los arrancadores estáticos suaves enel esquema de control del motor, existen diversas posibilidades, en funciónde las especificaciones para el accionamiento completo.
Cuando el motor ha de ser para los dos sentidos de giro, el arrancador suave va en cabeza y posteriormente el inversor formado por dos contacto-res. Esta es la disposición empleada, ya que el arrancador suave es sensibleal cambio en la secuencia de fases (véase Figura 4.9).
También en los casos en los que el arrancador suave se prevé sólo paraarrancar, hace falta un contactor que lo puentee durante el servicio normal.El esquema de esta variante se ve en la Figura 4.10.
Finalmente indicaremos las funciones protectoras más salientes que pue-den llevar incorporadas los arrancadores estáticos suaves. El propio arran-cador está protegido con fusibles extrarrápidos; este aspecto se ampliará enel Apartado 7.2.
La alta capacidad de proceso dc información y la posibilidad de progra-mar algoritmos sofisticados en los microprocesadores que controlan el
arrancador suave hace posible transvasar ciertas protecciones del motor almicroprocesador. Así se pueden evitar los guardamotores con protecciónmagnetotérmica. Los arrancadores suaves ofrecen como opción normal protecciones para el motor y el propio arrancador, tales como:
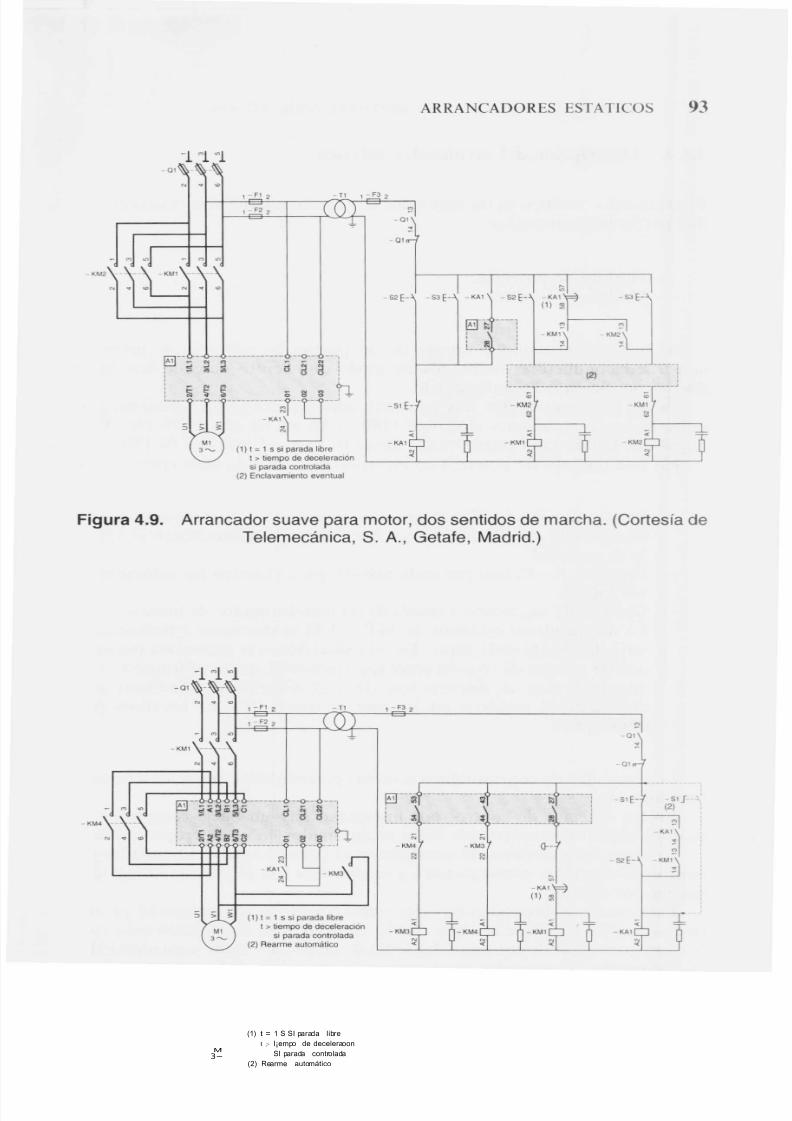
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 114/343
ARRANCADORES ESTATICOS 93
-a'1 F12
1 F22
Tl l-F32
-a'
-al
- K M ' 9 iK M I
- - N '" <el N ••• <D
E ! l - - - - - - - - - - - - - - - - - - -<>- - - -,
t' ~ ~ ~ ¡ ¡ ~ ~ i, ', '
L - - - m ~ - - ~ - ~ ~ [ g 0 _ _ 8 - 8 . f1- " '"
5 ;: ~ ~
M'3 __ _ (1)1= 1 ssipa ra da lJbre
1 > tiempo de deceleraclón
SI parada controlada
(2) EnclavamIento eventual
Figura 4.9. Arrancador suave para motor, dos sentidos de marcha. (Cortesía deTelemecánica, S. A., Getafe, Madrid.)
M'
3~
(1) t = 1 S SI parada libre
t ;> I¡empo de deceleraoon
SI parada controlada
(2) Rearme automático
1 F32
-a'
a'
S'J(2)
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 115/343
94 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
4.1.4. Descripción del arrancador estático
El arrancador estático es un regulador de tensión alterna con tiristores condos partes fundamentales:
Módulo de potencia.Módulo de control.
El módulo de potencia consta de un puente de tiristores de potenciacon 6 semiconductores montados de modo que dentro de cada fase hayados en oposición o en antipara lelo.
En la fase, uno de los dos tiristores conduce un tiempo máximo quecorresponde a 1 T radianes eléctricos (180° o 10 ms en c,a de 50 Hz). Esteángulo de conducción puede variar desde 0° hasta el máximo de 180°.
En este módulo de potencia se incorporan elementos tales como:
Varistores o diodos Zener para la supresión de sobretensiones proce-dentes de la red. Se eligen para que limiten la sobretensión al 150%de la nominal.Circuitos R - C, uno por cada tiristor, para absorber las sobretensio-nes locales.Circuito de encendido a través de un transformador de impulsos. Enlos arrancado res estáticos de MT (6 kV) se disponen 3 tiristores enserie dentro de cada rama. En esta situación son necesarias resisten-cias de reparto de tensión entre los tiristores. Los transformadores de
impulsos para el disparo son de alto aislamiento. También hayarrancadores estáticos en los que se transmiten los impulsos por fibra óptica.
Los módulos de control tienen diversas posibilidades que se describen acontinuación.
En los sistemas de control por intensidad hay un bucle cerrado en elcual los algoritmos adecuados están programados en un microprocesador.
Se ajusta la intensidad de consigna en el panel frontal del regulador detensión mediante un potenciómetro y se compara con la intensidad real quecircula por el motor.
Para medir la intensidad hay dos transformadores de intensidad en dosfases; su salida en c/a se rectifica dando una salida en c/c normalizada, quese compara con la de consigna. La señal de error pasa a un regulador PID,nllP cip:tprmln~ 1~ ("{)rrpr-r-iÁn f'n DI ;; •...•n.. l ...•.,1 ..-...J:..J_ ...J_ 1 __ ~~._: • T""

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 116/343
ARRANCADORES ESTATICOS 95
I real
Figura 4.11. Regulador de tensión con control de intensidad en el motor.
tiene retardos importantes, y su velocidad de respuesta total es del orden de10 ms, equivalente a un semiperíodo.
Este sistema garantiza un buen seguimiento de la consigna en condicio-nes nominales, de arranque, y también en otras tales como las de sobrecargay cortocircuito.
Las consignas se pueden variar para lograr:
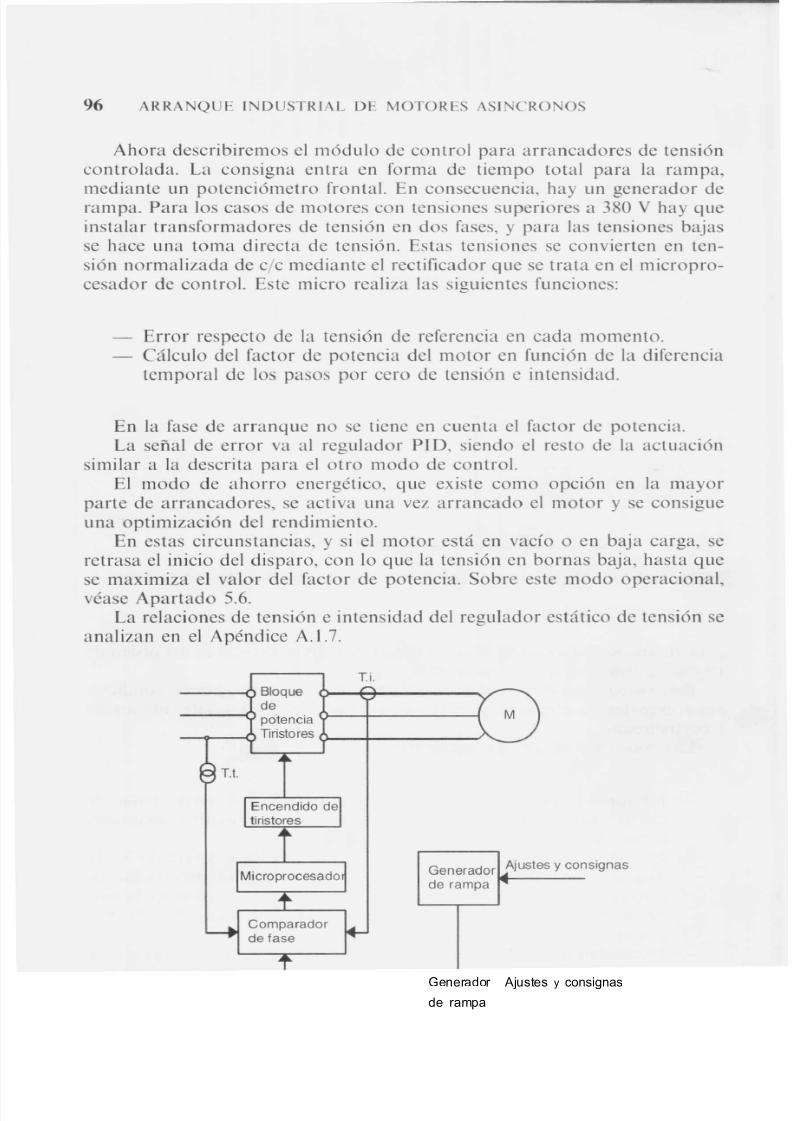
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 117/343
96 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Ahora describiremos el módulo de control para arrancado res de tensión
controlada. La consigna entra en forma de tiempo total para la rampa,mediante un potenciómetro frontal. En consecuencia, hay un generador derampa. Para los casos de motores con tensiones superiores a 380 V hay queinstalar transformadores de tensión en dos fases, y para las tensiones bajasse hace una toma directa de tensión. Estas tensiones se convierten en ten-sión normalizada de c/c mediante el rectificador que se trata en el micropro-cesador de control. Este micro realiza las siguientes funciones:
Error respecto de la tensión de referencia en cada momento.Cálculo del factor de potencia del motor en función de la diferenciatemporal de los pasos por cero de tensión e intensidad.
En la fase de arranque no se tiene en cuenta el factor de potencia.La señal de error va al regulador PID, siendo el resto de la actuación
similar a la descrita para el otro modo de control.El modo de ahorro energético, que existe como opción en la mayor
parte de arrancado res, se activa una vez arrancado el motor y se consigue
una optimización del rendimiento.En estas circunstancias, y si el motor está en vacío o en baja carga, se
retrasa el inicio del disparo, con lo que la tensión en bornas baja, hasta quese maximiza el valor del factor de potencia. Sobre este modo operacional,véase Apartado 5.6.
La relaciones de tensión e intensidad del regulador estático de tensión seanalizan en el Apéndice A.l.7.
Ti.
Bloquede
potencia
Tiristores
Generador Ajustes y consignas
de rampa
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 118/343
ARRANCADORES ESTATICOS 97
4.1.5. Especificaciones para el arrancador estático
Aunque estamos ante un modo de arranque de tecnología bastante introdu-cida, todavía no ha adquirido el grado de normalización de los otrossistemas. Para que el lector tenga la mayor información posible para unaaplicación correcta de equipos, se ha realizado un resumen de especificacio-nes en el Apéndice A.2.10.
En este apartado vamos a dar la relación más amplia posible de caracte-rísticas; en los casos particulares es posible renunciar a varias de las mismas:
Tensión nominal de alimentación.Tensión máxima en régimen permanente.Frecuencia nominal.Intensidad nominal.]ntensidad nominal en régimen de corta duración (60").Potencia del mayor motor que puede arrancar.Modos de arranque:
• Rampa de tensión ajustable mediante potenciómetro, con umbralde tensión inicial y tensión final.
• Limitación de intensidad ajustable mediante potenciómetro .• Impulso de despegue booster durante unos pocos períodos al inicio
del arranque.
Modos de parada:
• Parada libre por corte de alimentación de estátor.• Parada controlada por rampa negativa de tensión.
• Parada por inyección de corriente continua.
Tolerancia al desequilibrio de la carga.- Pérdidas del arrancador para la intensidad nominal J N'
- Temperatura ambiente para funcionamiento.Máxima altura de instalación.Refrigeración del arrancador y de los tiristores.Calentamiento en función del tiempo de conexión.Frecuencia de arranques. Se estudia con la intensidad media cuadrá-
tica según el ciclo temporal de corrientes que tenga; la media cuadrá-tica no debe de superar a la corriente nominal de funcionamiento.Tiempo mínimo entre dos arranques sucesivos.Protecciones integradas del motor y arrancador:
• Sobrecarga moderada.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 119/343
98 ARRANQ E IND STRIAL DE MOTORES ASINCRO OS
• Bloqueo del motor.
Sobreintensidad ajustable. Es la máxima de bloqueo del motor.Depende del motor empleado.
• Protección frente a cortocircuitos. Es la anterior.• Protección contra oscilación de intensidad durante el arranque.• Protección frente a las sobretensiones. Cuando hay aumentos súbi-
tos de tensión de red, el ángulo de conducción de los tiristores sereduce en menos de medio ciclo para disminuir la tensión aplicadaal motor.
Contenido en armónicos en red y en motor.Pilotos para señalar defectos:
• Fuera de servicio.• Defecto interno.• Fallo de refrigeración.• A plena carga.• Fal ta de una fase.• Defecto térmico.
• Sobrecarga.• Otros.
Relés de salida para señalización:
• Número de ellos.• Corriente de empleo.• Tensión de empleo.• Duración mecánica, número de maniobras.
Opciones para mejor aprovechamiento del módulo de potencia. Al-gunos fabricantes ofrecen la posibilidad de usar la conexión triángu-lo para mejorar el empleo de los tiristores de potencia, ya que su
corriente es 1/ j3 de la de línea (véase Figura 4. I3).Descripción del módulo de potencia:
• Puente trifásico de tiristores en antiparalelo.• Impulsos de encendido. Impulsos de conducción:
- Tensión.- Intensidad.
Descripción de los modos de control:
• Coordinación con los dispositivos de protección del cortocircuito.
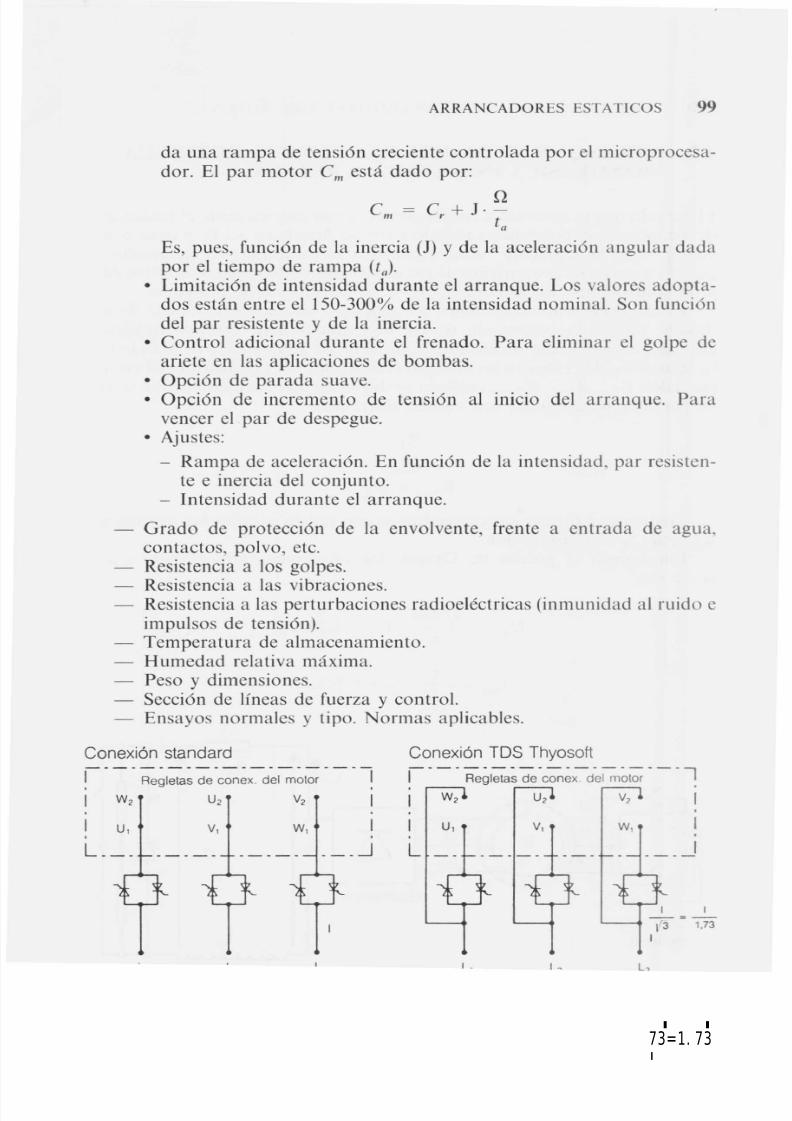
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 120/343
ARRANCADORES ESTATICOS 99
da una rampa de tensión creciente controlada por el microprocesa-
dor. El par motor C m está dado por:
Es, pues, función de la inercia (1) y de la aceleración angular dada por el tiempo de rampa (tJ.
• Limitación de intensidad durante el arranque. Los valores adopta-dos están entre el 150-300% de la intensidad nominal. Son funcióndel par resistente y de la inercia.
• Control adicional durante el frenado. Para eliminar el golpe deariete en las aplicaciones de bombas.• Opción de parada suave .• Opción de incremento de tensión al IniCIO del arranque. Para
vencer el par de despegue.• Ajustes:
- Rampa de aceleración. En función de la intensidad, par resisten-te e inercia del conjunto.
- Intensidad durante el arranque.
Grado de protección de la envolvente, frente a entrada de agua,contactos, polvo, etc.Resistencia a los golpes.Resistencia a las vibraciones.Resistencia a las perturbaciones radioeléctricas (inmunidad al ruido eimpulsos de tensión).
- Temperatura de almacenamiento.Humedad relativa máxima.Peso y dimensiones.
Sección de líneas de fuerza y control.Ensayos normales y tipo. Normas aplicables.
I I
73=1. 73I
Conexión TOS Thyosoft
,- - - Re gleta~de-c-;; '~;-d~¡;;l~¡;;- - - ~
I W2 U2 V2
I
L
Conexión standard
!---~;Ieta~ -; -con~x~d~~~tor - - . ~
I W 2 U 2 V 2 I. .I U , v , w , I. .L.__ .____ ___ ~
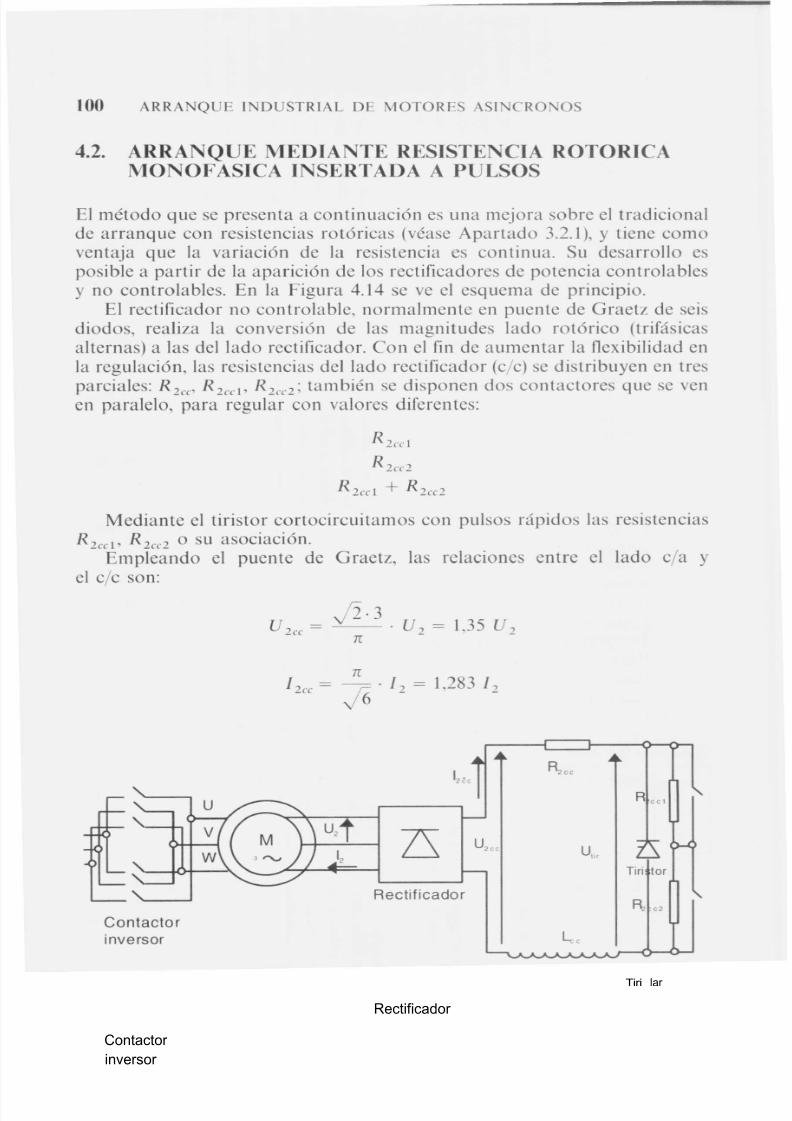
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 121/343
100 ARRANQUE INDUSTRIAL DE MOTORES AS! CRONOS
4.2. ARRA QUE MEDIANTE RESISTE CIA ROTORICA
MONOFASICA INSERTADA A PULSOS
El método que se presenta a continuación es una mejora sobre el tradicionalde arranque con resistencias rotóricas (véase Apartado 3.2.1), y tiene comoventaja que la variación de la resistencia es continua. Su desarrollo es posible a partir de la aparición de los reclificadores de potencia controlablesy no controlables. En la Figura 4.14 se ve el esquema de principio.
El rectificador no controlable, normalmente en puente de Graetz de seisdiodos, realiza la conversión de las magnitudes lado rotórico (trifásicas
alternas) a las del lado rectificador. Con el fin de aumentar la nexibilidad enla regulación, las resistencias del lado rectificador (c/c) se distribuyen en tres parciales: R2w R2ec1 , R2cc2; también se disponen dos contactores que se venen paralelo, para regular con valores diferentes:
R 2C c!
R 2cc2
R2ec1 + R2cc2
Medianle el tiristor cortocircuitamos con pulsos rápidos las resistenciasR 2cc1' R 2cc2 o su asociación.
Empleando el puente de Graetz, las relaciones entre el lado c/a y
el c/c son:
U2cc =
Tiri lar
Rectificador
Contactor
inversor
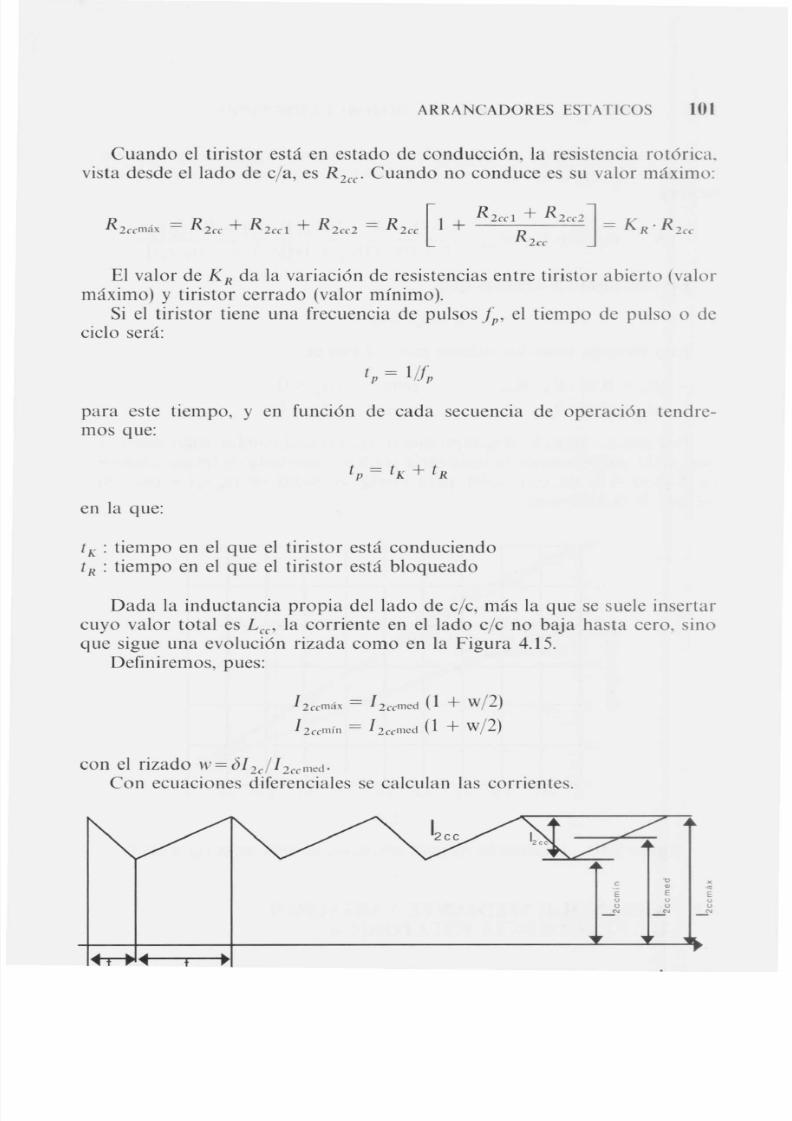
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 122/343
ARRA CADORES ESTATICOS 101
Cuando el tiristor está en estado de conducción, la resistencia rotórica,
vista desde el lado de c/a, es R2cc" Cuando no conduce es su valor máximo:
[
R2ccl + R2CC2 J R2ccmiíx = = R 2cc + R 2cc1 + R 2cc2 = = R 2cc 1 + ------ = = K R·R 2cc
R2cc
El valor de K R da la variación de resistencias entre tiristor abierto (valor máximo) y tiristor cerrado (valor mínimo).
Si el tiristor tiene una frecuencia de pulsos I p , el tiempo de pulso o deciclo será:
para este tiempo, y en función de cada secuencia de operación tendre-mos que:
en la que:
tI\. : tiempo en el que el tiristor está conduciendot R : tiempo en el que el tiristor está bloqueado
Dada la inductancia propia del lado de c/c, más la que se suele insertar cuyo valor total es Lec> la corriente en el lado c/c no baja hasta cero, sinoque sigue una evolución rizada como en la Figura 4.15.
Definiremos, pues:
12ccmáx = 12ccmcd (1 + w /2)
12ccJ1lín = 12ccJ1lcd (1 + w /2)
con el rizado w = (jJ 2 e ! 12ccmed.
Con ecuaciones diferenciales se calculan las corrientes.
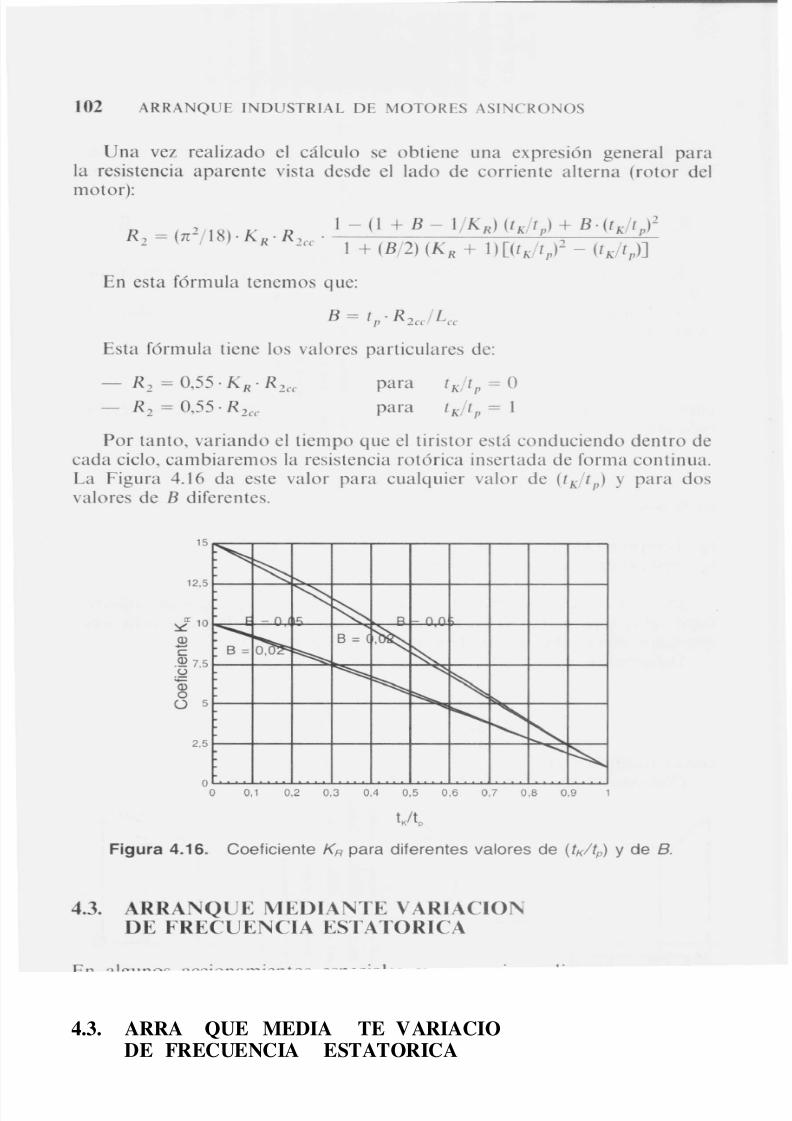
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 123/343
102 ARRANQUE INDUSTRIAL DE MOTORES ASI CRONOS
Una vez realizado el cálculo se obtiene una expreslOn general para
la resistencia aparente vista desde el lado de corriente alterna (rotor delmotor):
R - (7[2/ l 8) . K . R . _ I_-_ (_ I_+_B_-_ I / __K_ R_) _(I_K _ I p _ l _+_B_. ( _ 1 K_/'_pl_2
2 - R 2ee 1+ (B/2) (K R
+ Il[(I K /t p)2 - ( IK/tp)J
En esta fórmula tenemos que:
B =1 1 " R2ecl Lee
Esta fórmula tiene los valores particulares de:
- R2 = 0,55·K R·R2ee
- R2 = 0,55· R2ee
pa ra 1K I 1l' = ° para 1 K / ' l' = l
Por tanto, variando el tiempo que el tiristor está conduciendo dentro decada ciclo, cambiaremos la resistencia rotórica insertada de forma continua.La Figura 4.16 da este valor para cualquier valor de (1 K /1 p ) y para dosvalores de B diferentes.
15
12.5
~CI: 10
(])
e.~ 7,5
U
~oo 5
2,5
° ° 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Figura 4.16. Coeficiente K R para diferentes valores de (tK/tpl Y de B.
4.3. ARRA QUE MEDIA TE VARIACIODE FRECUENCIA ESTATORICA
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 124/343
ARRANCADORES ESTATICOS 103
Si para tales accionamientos se emplean motores de rotor en cortocircui-
to, la mejor forma de cumplir estos requisitos es la alimentación con fre-cuencia variable de valores muy bajos.Este tipo de arranque se emplea en general cuando por otros motivos el
accionamiento tiene un inversor de frecuencia, para obtener velocidad va-riable.
Empleando convertidor de frecuencia se puede regular el par, ya que es posible el control del flujo magnético en el entrehierro, que es la magnitudfísica que genera el par electromagnético.
Desde el punto de vista técnico-económico, la justificación de este modo
de arranque sólo es posible si los requisitos de suavidad de arranque ycontrolabilidad de par no son obtenibles con otros métodos más sencillosy baratos.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 125/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 126/343
CAPITULO
CINCO
EL FUNCIONAMIENTODEL ARRANCADOR ESTATICO
En este capítulo vamos a revisar las características operacionales más im- portantes del arrancador estático, adoptando el punto de vista del usuario.
Los aspectos que se van a cubrir sólo tienen importancia en el caso de queel arrancador quede conectado en permanencia, y son los siguientes:
Armónicos generados.Efecto de los armónicos en las características del motor.Intensidad reactiva y aparente absorbida.El comportamiento energético del motor alimentado por arrancador.Rendimiento propio de los arrancadores estáticos.El arrancador estático y el ahorro energético.
Corrección del factor de potencia cuando hay arrancador estático.El uso del arrancador estático para evitar el funcionamiento de losmotores en vacío.Comportamiento del arrancador estático en arranques sucesivos.
5.1. LOS ARMONICOS GENERADOSPOR LOS ARRANCADORES EST ATICOS
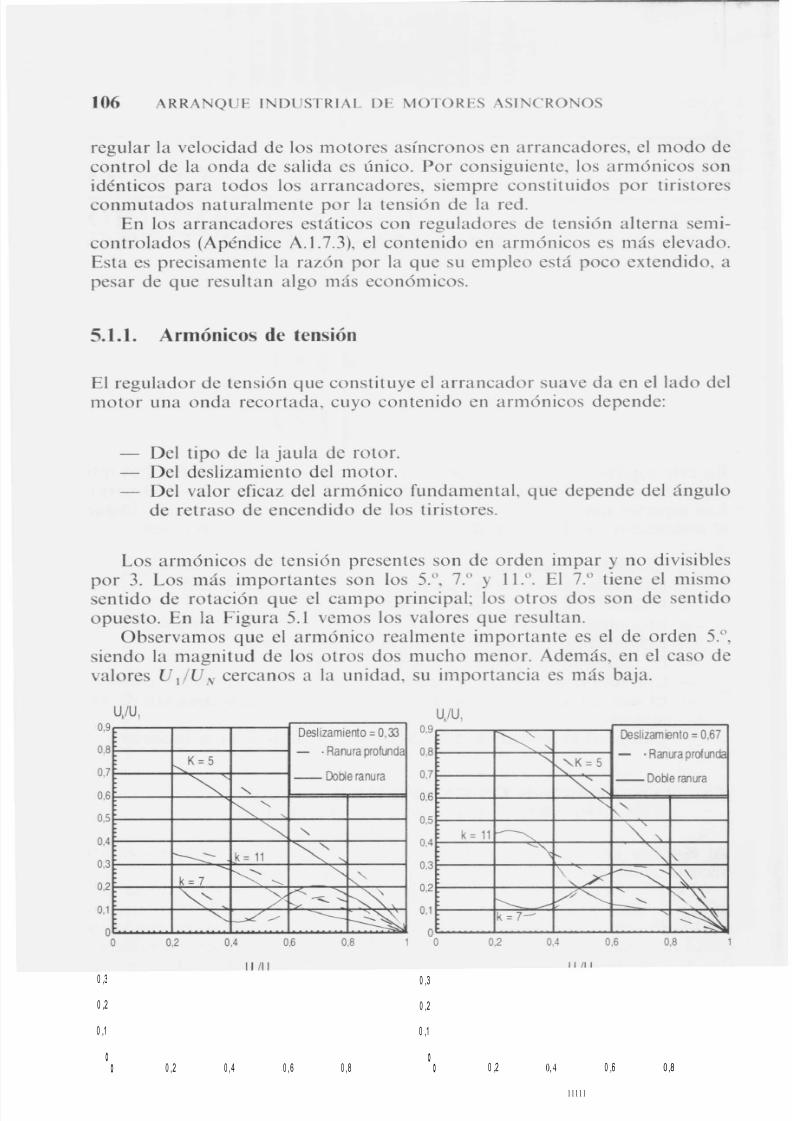
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 127/343
106 ARRA QUE INDUSTRIAL DE MOTORES ASINCRO OS
regular la velocidad de los motores asíncronos en arrancado res, el modo de
control de la onda de salida cs único. Por consiguiente, los armónicos sonidénticos para todos los arrancadores, siempre constituidos por tiristoresconmutados naturalmente por la tensión de la red.
En los arrancadores estáticos con reguladores de tensión alterna semi-controlados (Apéndice A.I.7.3), el contenido en armónicos es más elevado.Esta es precisamentc la razón por la que su empleo está poco extendido, a
pesar de que resultan algo más económicos.
5.1.1. Armónicos de tensión
El regulador dc tensión que constituye el arrancador suave da en el lado delmotor una onda recortada, cuyo contenido en armónicos depende:
Del tipo de la jaula de rotar.Del deslizamiento del motor.Del valor eficaz del armónico fundamentaL que depende del ángulo
de retraso de encendido de los tiristores.
Los armónicos de tensión presentes son de orden impar y no divisibles por 3. Los más importantes son los 5.", 7." Y 11.". El 7." tiene el mismosentido de rotación que el campo principal; los otros dos son de sentidoopuesto. En la Figura 5.1 vemos los valores que resultan.
Observamos que el armónico realmente importante es el de orden 5.",siendo la magnitud de los otros dos mucho menor. Además, en el caso devalores U l /U"~, cercanos a la unidad, su importancia es más baja.
k = 1 1
Desl izamiento = 0 ,67
- . R a nu ra p ro tu n
- D ob le ranu ra
0 ,80 ,60, 40 ,2
U JU ,
Desl izamiento = 0 ,33 0 ,9
- . R anu ra p ro fu1d 0 ,8
_ D ob le ra nu ra 0 ,7
0 ,6
0 ,5
0 ,4
0 ,3
0 ,2
0 ,1
°0 ,6 0 ,8
°
U/U,0 ,9
0 ,8K =5
0 ,7
0 ,6
0 ,5
0 ,4
0 ,3
0 ,2
0 ,1
° ° 0 ,2 0 ,4
11111
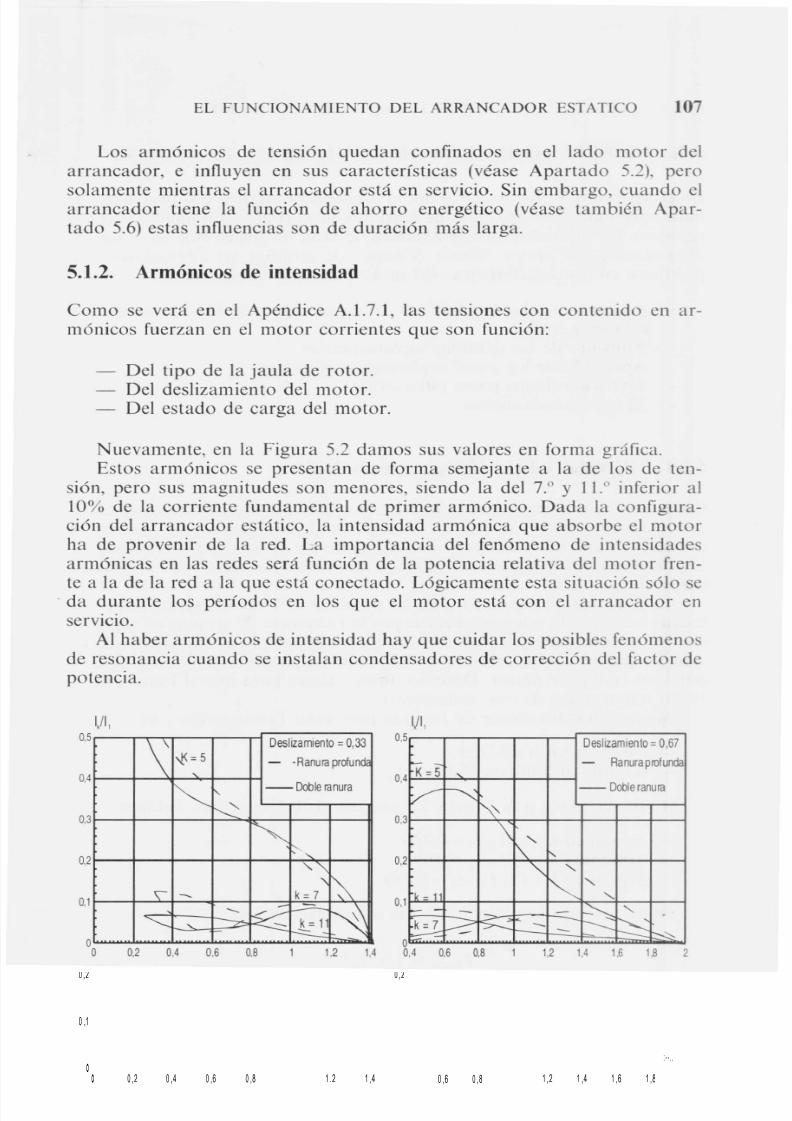
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 128/343
EL FU cro AMIE TO DEL ARRANCADOR ESTATICO 107
Los armónicos de tensión quedan confinados en el lado motor del
arrancador, e influyen en sus características (véase Apartado 5.2), perosolamente mientras el arrancador está en servicio. Sin embargo, cuando elarrancador tiene la función de ahorro energético (véase también Apar-tado 5.6) estas influencias son de duración más larga.
5.1.2. Armónicos de intensidad
Como se verá en el Apéndice A.1.7.1, las tensiones con contenido en ar-mónicos fuerzan en el motor corrientes que son función:
Del tipo de la jaula de rotor.Del deslizamiento del motor.Del estado de carga del motor.
Nuevamente, en la Figura 5.2 damos sus valores en forma gráfica.Estos armónicos se presentan de forma semejante a la de los de ten-
sión, pero sus magnitudes son menores, siendo la del 7.° y 11.° inferior al10% de la corriente fundamental de primer armónico. Dada la configura-ción del arrancador estático, la intensidad armónica que absorbe el motor ha de provenir de la red. La importancia del fenómeno de intensidadesarmónicas en las redes será función de la potencia relativa del motor fren-te a la de la red a la que está conectado. Lógicamente esta situación sólo se
. da durante los períodos en los que el motor está con el arrancador enserVICIO.
Al haber armónicos de intensidad hay que cuidar los posibles fenómenosde resonancia cuando se instalan condensadores de corrección del factor de potencia.
V I , V I ,0 ,5
D e sliz a m ie n to = 0 ,33 0 ,5
D e sliz a m ie n to = 0 ,67
-. R a n u ra p ro fu -R a n u ra p lO f u n d a
0 ,4- D o b l e r a n u r a
0 ,4 K = 5
- D o b l e r a n u r a
0 ,3 0 ,3
0 ,2 0 ,2
0 ,1
: - - . .
° ° 0 ,2 0 ,4 0 ,6 0 ,8 1 .2 1 ,4 0 ,6 0 ,8 1 ,2 1 ,4 1 ,6 1 ,8

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 129/343
108 ARRANQUE INDUSTRIAL DE MOTORES ¡\SINCRONOS
5.2. EL EFECTO DE LOS ARMONICOS EN EL MOTOR
En el Apartado 5.1 hemos visto que el arrancador estático produce determi-nados armónicos en las ondas de tensión y de corrientc. En aquel apartadose vieron los armónicos desde el punto de vista de sus efectos en la red dealimentación del motor. Ahora debemos de estudiar las alteraciones que producen en las características del motor, que son las siguientes:
Aumento de las pérdidas R· 12 en el cobre de los devanados deestátor y rotar.
Aumento de las pérdidas suplementarias.Aparición de los parcs suplementarios parásitos.Aparición de los pares pulsatorios.Mayor calentamiento.
5.2.1. Pérdidas adicionales por efecto Joule
Como se ha visto en el Apartado 5.l.2, por el bobinado de estátor circulancorrientes armónicas superiores. Aunque en el entrehierro existen camposarmónicos superiores, el efecto amortiguador de las jaulas rotóricas es tanimportante que en el circuito rotórico las corrientes armónicas se puedendespreciar.
Para calcular el incremento de las pérdidas R· 12 en el estátor basta ver cuánto aumenta la intensidad eficaz por la existencia de armónicos superio-res. No se considera que crece la resistencia óhmica por el efecto pelicular oskin, ya que los conductores de los bobinados de estátor están muy subdivi-didos en cualquier motor. Daremos unos valores para que el lector pueda
ver la importancia de estc incremento.Supongamos un motor de ranuras profundas funcionando con:
Deslizamiento d = 0,33.Intensidad fundamental 1, = I ,v '
Si nos referimos a la Figura 5.2 obtenemos los siguientes valores:
Armónico k =5, Is/I , =0,220.
Armónico k=7, 17//1 =0,095.Armónico k = 11, J 11 1 1 = 0,040.
Con estos valores calcularemos la intensidad eficaz:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 130/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO 109
Como las pérdidas son función del cuadrado de la intensidad eficaz, en
este caso se verían multiplicadas por:
1,029082 = 1,059
Es decir, incrementadas en un 5,9%. Como un motor asíncrono tieneunas pérdidas R· 12 que oscilan entre el 20 y el 40% de las totales, elincremento supone entre el I y el 2% de las pérdidas totales del motor.
5.2.2. Aumento de las pérdidas suplementarias
Cuando el motor funciona alimentado con tensión senoidal, existen ciertas pérdidas que están causadas por los Oujos dispersos que inciden sobrecomponentes estructurales del motor. Los mecanismos físicos de estas pérdi-das son principalmente:
- Histéresis magnética, si los componentes son ferromagnéticos.
- De corrientes parásitas (Foucault o Eddy) inducidas por estos cam- pos en cualquier elemento metálico que presenta secciones macizasimportantes frente al Oujo disperso.
Estas pérdidas son difíciles de medir y de calcular, incluso con alimenta-ción senoidal, y las normas permiten expresarlas como un porcentaje de la potencia total del motor o de sus pérdidas a plena carga.
Con la alimentación no senoidal propia de los arrancadores estáticosaparecen campos magnéticos de frecuencia superiores (órdenes 5.°, 7.°,11.°, etc.). Estos campos originan aumentos adicionales sobre las pérdidasexistentes con alimentación senoidal. Sin embargo, su medición y cálculoson más difíciles todavía. En consecuencia no se pueden dar expresionessencillas para tenerlas en cuenta.
5.2.3. Generación de pares suplementarios parásitos

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 131/343
110 ARRANQUE INDUSTRIAL DE M OTORES ASINCRONOS
Como estos arm6nicos originan ondas de campo cuya velocidad es
múltiplo 5.",7." Y 11.° de la del campo principal, el motor tiene un desliza-miento frente a estos campos que se expresa por la f6rmula:
1 - s )Sk = l -
k
en la que:
SI : Deslizamiento respecto del campo fundamentalSk : Deslizamiento para el arm6nico k O
k : Orden del arm6nicoSi calculamos los deslizamientos para los arm6nicos que se presentan en
la onda de tensi6n y para el motor a la velocidad síncrona ( s I= O ) y motor parado ( s 1=1), obtenemos:
k
-5 7 -11
SI = O 1 ,2 0,86 1,09
SI = 1 1 1 I
viendo que los valores del deslizamiento para todos los casos difieren muy poco de la unidad. Entonces es más simple realizar el cálculo de los paresmediante las expresiones:
5.° arm6nico C 5 c : : : : - 0,09· (U 5/U y. (U I/UN)2
- 7.° arm6nico C7 c : : : : 0,06·(U7 /U¡)2·(UI/U"Y
El signo (-) indica que el par es antagonista. Los valores para elarm6nico 11.° no se incl uyen, pues son despreciables. Los valores de (U J U 1 )
Y de (U¡jUN) salen de la Figura 5.1.
5.2.4. Generación de pares pulsatorios parásitos
Los pares estudiados en el apartado anterior son constantes en sentido delgiro del campo principal u opucstos a él. Además de ellos existen otros denaturaleza pulsatoria o alterna. Están generados por la interacci6n de losarm6nicos superiores de la tensi6n de alimcntaci6n de 6rdenes k diferentes.Estos arm6nicos superiores tienen un valor medio nulo y oscilan en torno a
él con frecuencias definidas por la expresi6n:
f · = f ' ( k - 1 ) ,p ,

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 132/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATlCO 111
Considerando los valores k = - 5, 7 obtendremos que:
j~=6..r
Es decir, la frecuencia pulsatoria que nos encontraremos en redes de50 Hz será 300 Hz.
La amplitud simple del par pulsante está dada por la expresión aproxi-mada:
Los valores de 1k/ 11, 11 /1 N se sacan de la Figura 5.2. Aplicando este par pulsatorio a la ecuación general de las masas rotatorias (véase Aparta-do 2.1.1), obtenemos la oscilación de velocidad:
en la que:
nmü x : Amplitud simple de la oscilación de velocidadJ T : Inercia total del motor y de la máquina acoplada
En la mayor parte de los casos la amplitud de esta oscilación de veloci-dad es despreciable.
5.2.5. Incremento del calentamiento
M ientras el empleo del arrancador sea sólo para su función fundamental, elefecto de las mayores pérdidas, por las causas expresadas en los apartadosanteriores, ocurre durante breves lapsos de tiempo y en consecuencia suimpacto en el calentamiento del motor es despreciable.
Sin embargo, si el arrancador se usa para el ahorro energético enmotores funcionando con baja potencia, hay que tener en cuenta estosefectos en el calentamiento. La mayor parte de ellos, además, se concentraen los componentes más cargados y delicados del motor, tales como los bobinados. Como gran parte de estos efectos negativos son de evaluacióndifícil, es usual incrementar las pérdidas en funcionamiento senoidal con unvalor fijo que está en torno al 3710% de la pérdidas totales del motor para
cada régimen.Hemos de indicar, además, que ante el empleo más acentuado cada día
de arrancadores y de convertidores de frecuencia para alimentar motores,los fabricantes introducen mejoras para minimizar pérdidas de tipo parási-to. Entre ellas citaremos:
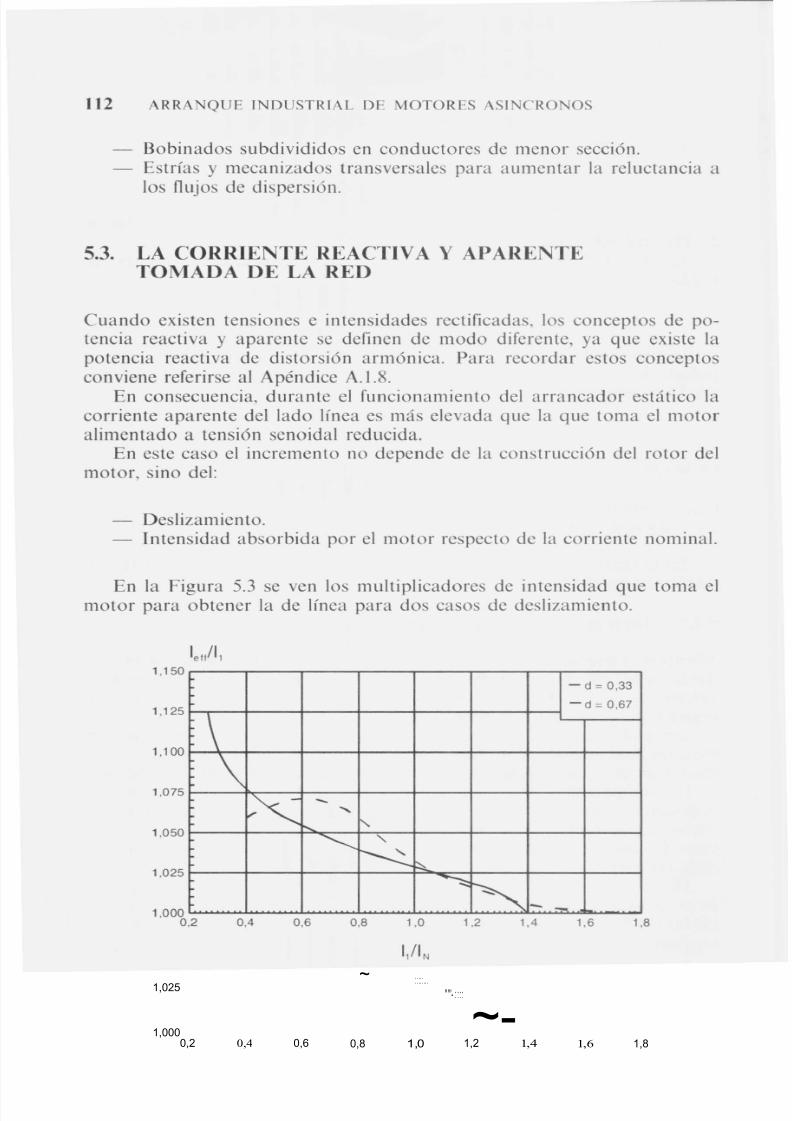
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 133/343
112 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Bobinados subdivididos en conductores de menor sección.
Estrías y mecanizados transversales para aumentar la reluctancia alos Ilujos de dispersión.
5.3. LA CORRIENTEREACTIVA y APARENTETOMADA DE LA RED
Cuando existen tensiones e intensidades rectificadas. los conceptos de po-
tencia reactiva y aparente se definen de modo diferente, ya que existe la potencia reactiva de distorsión armónica. Para recordar estos conceptosconviene referirse al Apéndice A.1.8.
En consecuencia, durante el funcionamiento del arrancador estático lacorriente aparente del lado línea es más elevada que la que toma el motor alimentado a tensión scnoidal reducida.
En este caso el incremento no depende de la construcción del rotor delmotor, sino del:
Deslizamiento.Intensidad absorbida por el motor respecto de la corriente nominal.
En la Figura 5.3 se ven los multiplicadores de intensidad que toma elmotor para obtener la de línea para dos casos de deslizamiento.
- d = 0,33-d = 0,67
\\
- > ~ . • . • . .
. . . . • .
" -~ " -
~ : : : : : . . ." " '- : : : :
~-
1,125
1,100
1,075
1,050
1,025
1,0000,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 134/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO 113
Se repiten las mismas observaciones de los apartados anteriores, por lo
quc este aumento de intensidad sólo está presente durante las fases dearranque y las de funcionamiento del arrancador con la opción de ahorroenergético.
5.4. EL COMPORTAMIENTO ENERGETICO DEL MOTORALIMENTADO CON ARRANCADOR EST ATICO
La eficiencia energética durante los procesos de arranque no proporciona
unos ahorros importantes en términos absolutos ni relativos, dada la breve-dad de la fase de arranque frente al tiempo en servicio permanente delmotor.
Sin embargo, el estudio del balance energético tiene interés, ya que laenergía disipada en los bobinados se invierte en su mayor parte en calentar-los. Esto sí es realmente decisivo, pues las altas temperaturas que eventual-mente se pueden alcanzar en los bobinados influyen en las averías y en lavida útil de estas partes entre reparaciones sucesivas.
El arrancador estático tiene en algunos casos la posibilidad de emplearsecomo controlador de tensión permanente de alimentación del motor, y asísirve para los casos en los que el motor funciona durante largos períodos detiempo dando muy bajas potencias. Esta posibilidad sí da algo mejor efi-ciencia energética.
En los Apartados 2.4.2 y 2.4.3 se estudió la disipación energética en los bobinados de rotor y estátor durante el arranque. Allí se indicó, además, larazón para estudiar el calentamiento en ellos de forma adiabática.
También es conveniente recordar que el estudio de la energía disipada esmás sencillo que el del calentamiento. El calentamiento del motor durante elarranque se estudiará en el Capítulo 8. Por otro lado, analizando las ener-gías disipadas, se puede obtener una aproximación superior del valor de lastemperaturas si se admite que el calentamiento es adiabático. Los cálculosque se realizaron en los apartados que se acaban de citar eran para elarranque directo, pero con pequeñas modificaciones en los mismos se trans- portará su validez para cualquier tipo de arranque de los presentados en losCapítulos 3 y 4, desde el punto de vista de la energía disipada. Para ello bastará simplemente ver cuánto se reduce el par motor a consecuencia delmétodo de arranque escogido y aplicar las mismas fórmulas.
Seguiremos la pauta del Ejemplo 2.2 y, además, emplearemos el mismo
motor con el fin de comparar los resultados. Vamos a aplicarla primera-mente y como referencia para un arranque estrella-triángulo y posterior-mente para el arrancador estático.
5.4.1. Energía disipada en el arranque estrella-triángulo

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 135/343
114 ARRANQUE INDUSTRIAL DE MOTORES ASI CRONOS
valor a tensión nominal, hemos estudiado este tipo de arranque para pares
resistentes constantes inferiores al 25% del nominal.Por claridad en las representaciones no se indican las pérdidas delestátor, pero su evolución es paralela a la del rotor.
Observando los valores de la figura anterior podemos concluir lo si-guiente:
Cuando el par resistente es nulo, la energía disipada en el rotor esigual para ambos casos de arranque. Este supuesto ya se consideró
en el Apartado 2.4.2 y la energía no tiene que ver con el tiempo dearranque y es igual siempre a:
1.º02. J
2
Para los demás casos de par resistente, la energía W r crece en propor-ción al tiempo de arranque. En consecuencia, la potencia mediadurante el arranque permanece constante. Ciertamente hay más con-sumo energético, pero al durar el arranque más tiempo la disipaciónmejora y la temperatura que alcanzan los bobinados es más baja.
20 1.000
.•. ta Directo - Wr Directo *ta Y-O ~ Wr y-O
15: § :
Q)
: : ; )o-e
~' "Q) 10
"O
oQ.
EQ)
¡=
-"5
750: : ; -2S
oée
500 Q)
.~E'Q)
eW
~.
250
OO 0,05 0,1 0,15 0,2
O0,25
Par resistente constante (%)

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 136/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO 115
5.4.2. Energía disipada cuando se emplea el arrancador estático
Es interesante ver el comportamiento disipando energía rotórica de un mo-tor con arrancador suave. Los casos que se presentan lo son para el supuestode intensidad controlada. Como este tipo de arrancador tiene la posibilidadde control, indicamos la inOuencia de las diferentes intensidades de consigna.
El ejemplo que se presenta en la Figura 5.5 es para par resistente decaracterística parabólica, como el que tienen las bombas y ventiladores.
En la figura citada hemos presentado los mismos datos de dos formasdistintas para facilitar su comprensión por parte del lector. En la gráfica dela izquierda se expresan los datos en función de la intensidad límite para lacual se ajusta el arrancador. En la de la derecha se presentan en función deltiempo de arranque. Observamos lo siguiente:
Con intensidades de consigna bajas, el tiempo de arranque se alargay también se incrementa la energía disipada en el rotor.En este caso el crecimiento de la energía rotórica W r es más lento queel del tiempo total de arranque. De este modo la potencia mediarotórica
p = W r
r t a
disminuye a medida que los arranques se hacen más lentos. Esto dauna ventaja innegable para el motor desde el punto de vista decalentamiento, ya que además de bajar la potencia media a disipar se posibilitan mejores refrigeraciones.Por debajo de la intensidad de 1.250 A, la reducción de par es tangrande que no es posible el arranque.
En la Figura 5.6 presentamos los resultados del análisis hecho con paresresistentes constantes del 25. 33 y 50°;;) del nominal del motor.
18 00 0 1.200~ t • . rarque +Wr ~I 11 P r( k l'1 l
16 B OO
14 70090 0
12 60 0
10 50060 0
40 0
30 030 0
20 0
10 0
o o O
1 20 0 1 .3 00 1 .4 00 1 .5 00 1 .6 00 1 .70 0 1 .8 00 1 .9 00 O
l im l le 00 I n te n s H i:ld de es takH (A)
o10 15
T iem p o d e a r ran q u e (5 )

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 137/343
116 ARRA QUE INDUSTRIAL DE MOTORES ASINCRONOS
1.500
S 1.000~oeeQ)
.~Ol
I De
W 500
/
O/O 5 10
Tiempo de arranque (5)
15
Figura 5.6. Arrancador estático aplicado a motor accionando carga de par
resistente constante.
Para ver la disminución de potencia media a medida que crece l" se hatrazado la recta de proporcionalidad tiempo/energía o recta de potenciadisipada constante.
Se podrían haber analizado otros casos del control del arrancador estático, tales como el de rampa de tensión o el de aceleración constante.
Los resultados, aunque distintos, marcarían las mismas tendencias que seacaban de señalar.
5.5. EL RE DIMIENTO PROPIO DEL ARRANCADORESTATICO
Existe muy poca información sobre valores prácticos del rendimiento de losarrancadores estáticos. Nos referimos a la información técnica comercialque se resume en el Apéndice A.2.] O. De ella extractamos los siguientesvalores:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 138/343
EL FUNCIONAMIENTO DEL ARRA CADOR ESTATICO 117
Si relacionamos estos tres valores a la intensidad nominal I" resultan,
respectivamente:
3,51 W/A3,00 W/A2,86 W/A
Vemos que las tres cifras son bastante parecidas y, en consecuencia,recomendamos emplear para las evaluaciones energéticas un valor referidoa la intensidad eficaz que circula de:
3,00 W/A
Para comprender los mecanismos de pérdidas en los arrancadores está-ticos recordamos que sus componentes más importantes son:
Pérdidas en los tiristores, que se desglosan en:
• Pérdidas por conducción.• Pérdidas por encendido .• Pérdidas por apagado.
Pérdidas en los embarrados o cables del arrancador.Pérdidas en componentes auxiliares, tales como:
• Pérdidas en transformadores auxiliares de medida e impulso.• Pérdidas en condensadores.• Pérdidas en circuitos de control.
De todas estas pérdidas la más importante es la de pérdidas por conduc-ción en los tiristores.
Es interesante conocer la ley que da la variación de estas pérdidas enfunción del estado de conducción de los tiristores. Para ello se recomiendaacudir al libro de referencia (4), Apartado 3.3.3.
En él encontramos la siguiente fórmula:
en la que:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 139/343
118 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Al aplicar esta fórmula vemos que la variación de las pérdidas con la
carga del arrancador no es lineal, tal como se ha expresado con el valor aproximado de:
3,00 W/A
No obstante, y para estimaciones, basta emplear esta ley lineal, ya quelas complicaciones del cálculo más exacto no merecen la pena.
5.6. EL ARRA CADOR ESTATICO PARA AHORRO
ENERGETlCO
Ya hemos indicado en apartados anteriores que la principal aplicación delarrancador estático es la que indica su nombre, y su justificación se realiza por la mejora que facilita en el arranque, desde los puntos de vista eléctrico,dinámico y térmico. También al reducir la intensidad absorbida prolongala vida de los motores e instalaciones, minimizando los costes de manteni-miento y de reposición de equipos. Como el arrancador estático puede mo-dificar su tensión de salida de una forma continua, la mayor parte de los
fabricantes ofrecen la posibilidad de emplearlo para alimentar a los motoresdurante los períodos largos en los que funcionen con potencia muy baja.En esta situación, cuando la tensión de alimentación es la nominal, el
motor tiene un exceso de capacidad para generar par, y mientras tanto sus pérdidas magnéticas y corriente magnetizante permanecen fijas.
En estas condiciones de alimentación con tensión más baja sucede que:
- El motor es capaz de dar el par requerido por la máquina accionada.- Las pérdidas magnéticas disminuyen muy rápidamente en función
del cuadrado de la tensión de alimentación.La corriente magnetizante disminuye más rápidamente que la ten-sión, ya que el motor funciona saturado. En consecuencia, mejora elfactor de potencia del motor y la corriente tomada de línea.
Estas ventajas, interesantes sin duda, están contrarrestadas por los si-guientes efectos de sentido contrario:
El deslizamiento crece, pues hay que suministrar el mismo par o muysimilar.
Las pérdidas de Joulc rotóricas se incrementan por la subida deldeslizamiento
P jo1l2
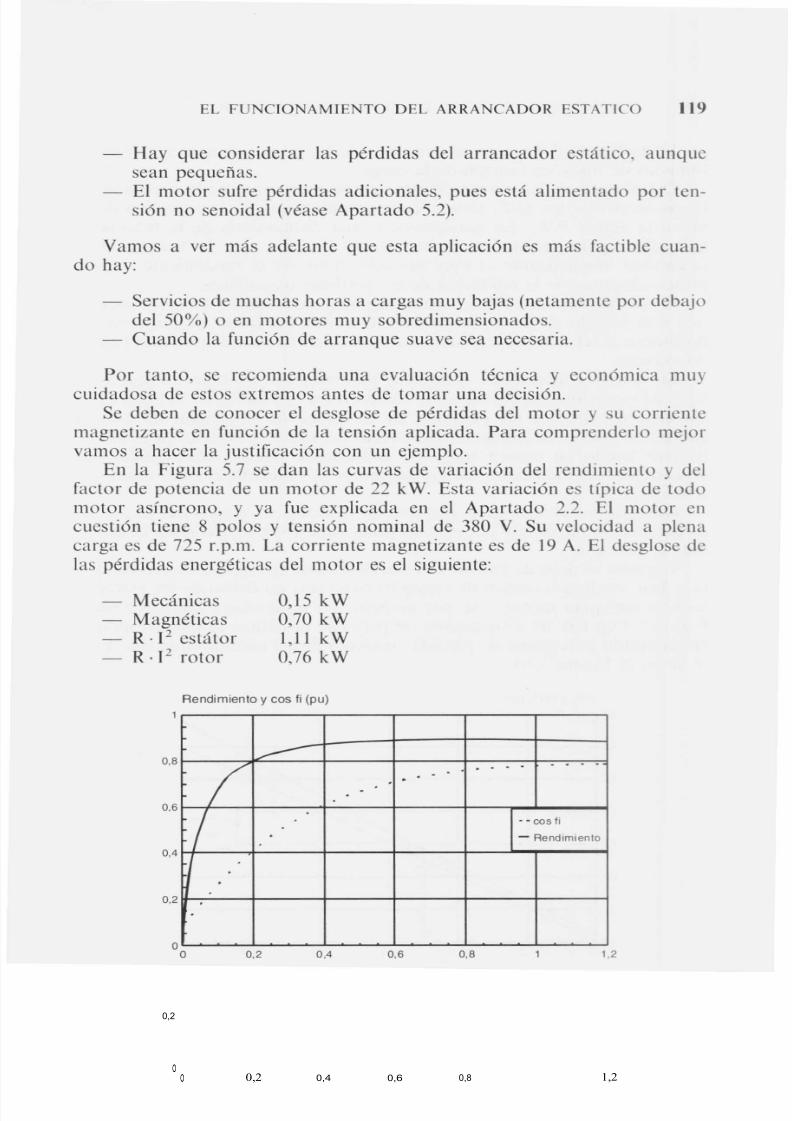
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 140/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO 119
Hay que considerar las pérdidas del arrancador estático, aunque
sean pequeñas.El motor sufre pérdidas adicionales, pues está alimentado por ten-sión no senoidal (véase Apartado 5.2).
Vamos a ver más adelante que esta aplicación es más factible cuan-do hay:
- Servicios de muchas horas a cargas muy bajas (netamente por debajodel 50%) o en motores muy sobredimensionados.
- Cuando la función de arranque suave sea necesaria.Por tanto, se recomienda una evaluación técnica y económica muy
cuidadosa de estos extremos antes de tomar una decisión.Se deben de conocer el desglose de pérdidas del motor y su corriente
magnetizan te en función de la tensión aplicada. Para comprenderlo mejor vamos a hacer la justificación con un ejemplo.
En la Figura 5.7 se dan las curvas de variación del rendimiento y delfactor de potencia de un motor de 22 k W. Esta variación es típica de todomotor asíncrono, y ya fue explicada en el Apartado 2.2. El motor encuestión tiene 8 polos y tensión nominal de 380 V. Su velocidad a plenacarga es de 725 r.p.m. La corriente magnetizan te es de 19 A. El desglose delas pérdidas energéticas del motor es el siguiente:
MecánicasMagnéticasR·12 estátor R. [2 rotor
0,15 kW0,70 kW1,11 kW0,76 kW
Rendimiento y cos ti (pu)
0,8
0,6
0,4
- - - -í
.
I l ' - cos fi- Rendimiento
0,2
° ° 0,2 0,4 0,6 0,8 1,2
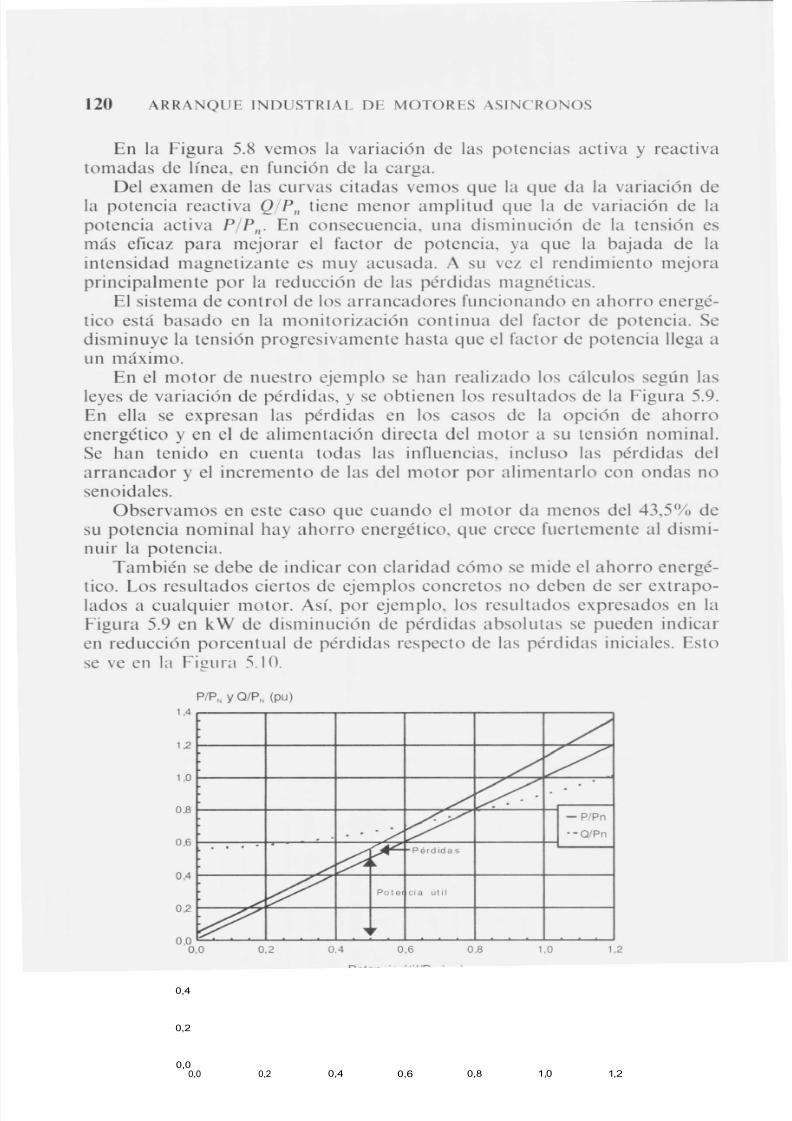
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 141/343
120 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
En la Figura 5.8 vemos la variación de las potencias activa y reactiva
tomadas de línea, en función de la carga.Del examen de las curvas citadas vemos que la que da la variación dela potencia reactiva Q / P
II tiene menor amplitud que la de variación de la
potencia activa P/PII• En consecuencia, una disminución de la tensión es
más eficaz para mejorar el factor de potencia, ya que la bajada de laintensidad magnetizan te es muy acusada. A su vez el rendimiento mejora principalmente por la reducción de las pérdidas magnéticas.
El sistema de control de los arrancadores funcionando en ahorro energé-tico está basado en la monitorización continua del factor de potencia. Se
disminuye la tensión progresivamente hasta que el factor de potencia llega aun máximo.En el motor de nuestro ejemplo se han realizado los cálculos según las
leyes de variación de pérdidas, y se obtienen los resultados de la Figura 5.9.En ella se expresan las pérdidas en los casos de la opción de ahorroenergético y en el de alimentación directa del motor a su tensión nominal.Se han tenido en cuenta todas las inOuencias, incluso las pérdidas delarrancador y el incremento de las del motor por alimentarlo con ondas nosenoidales.
Observamos en este caso que cuando el motor da menos del 43,5% desu potencia nominal hay ahorro energético, que crece fuertemente al dismi-nuir la potencia.
También se debe de indicar con claridad cómo se mide el ahorro energé-tico. Los resultados ciertos de ejemplos concretos no deben de ser extrapo-lados a cualquier motor. Así, por ejemplo, los resultados expresados en laFigura 5.9 en kW de disminución de pérdidas absolutas se pueden indicar en reducción porcentual de pérdidas respecto de las pérdidas iniciales. Estose ve en la Figura 5.10.
1,21,00,80,60,40,20,0
0,0
0,2
P/PN Y Q/PN (pU)
1,4
0,4
0,6
0.8
1,0
1,2
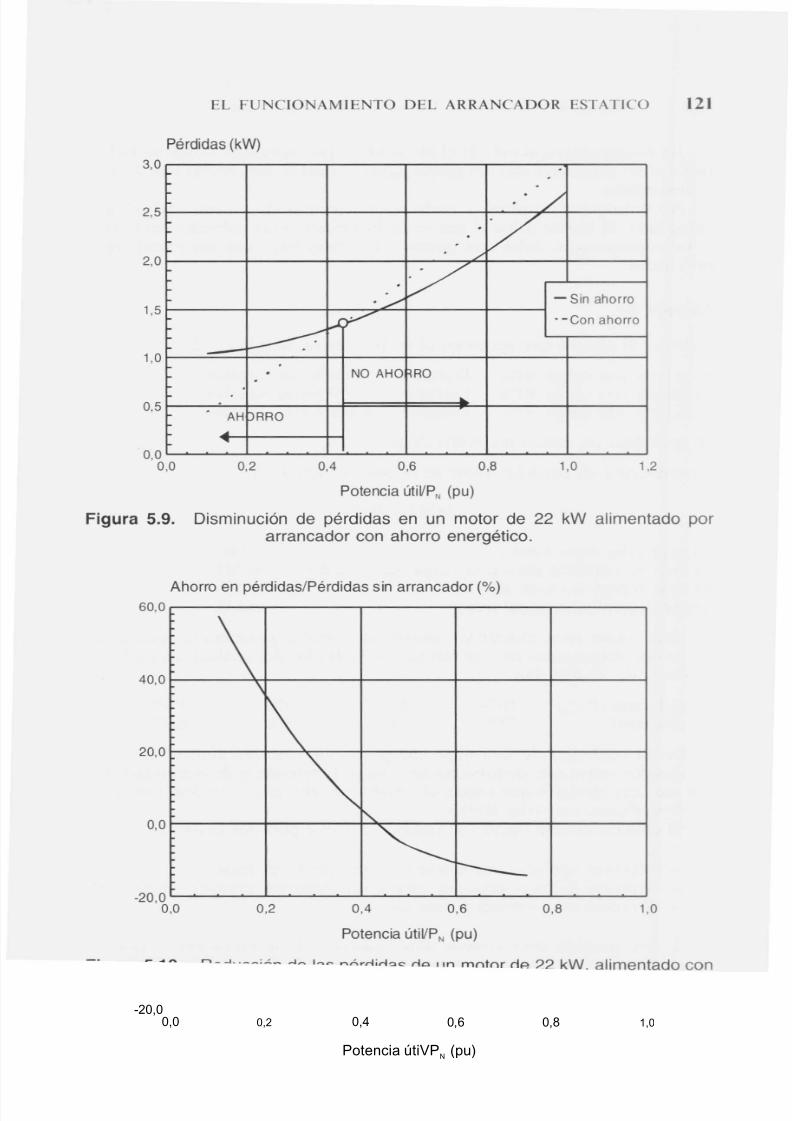
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 142/343
EL FUNCIONAMIENTO DEL ARRA CADOR ESTATICO 121
/
//'
../V - Sin ahorro
,J.r . -Con ahorro
-~
NO AHO RO
AH )RRO
2,0
0,5
2,5
1,0
Pérdidas (kW)
3,0
1,5
1,21,00,2
0,0
0,0 0,4 0,6 0,8
Potencia útiVPN (pu)
Figura 5.9. Disminución de pérdidas en un motor de 22 kW alimentado por arrancador con ahorro energético.
Ahorro en pérdidas/Pérdidas sin arrancador (%)
60,0
40,0
20,0
0,0
-20,00,0 0,2 0,4 0,6 0,8 1,0
Potencia útiVPN
(pu)
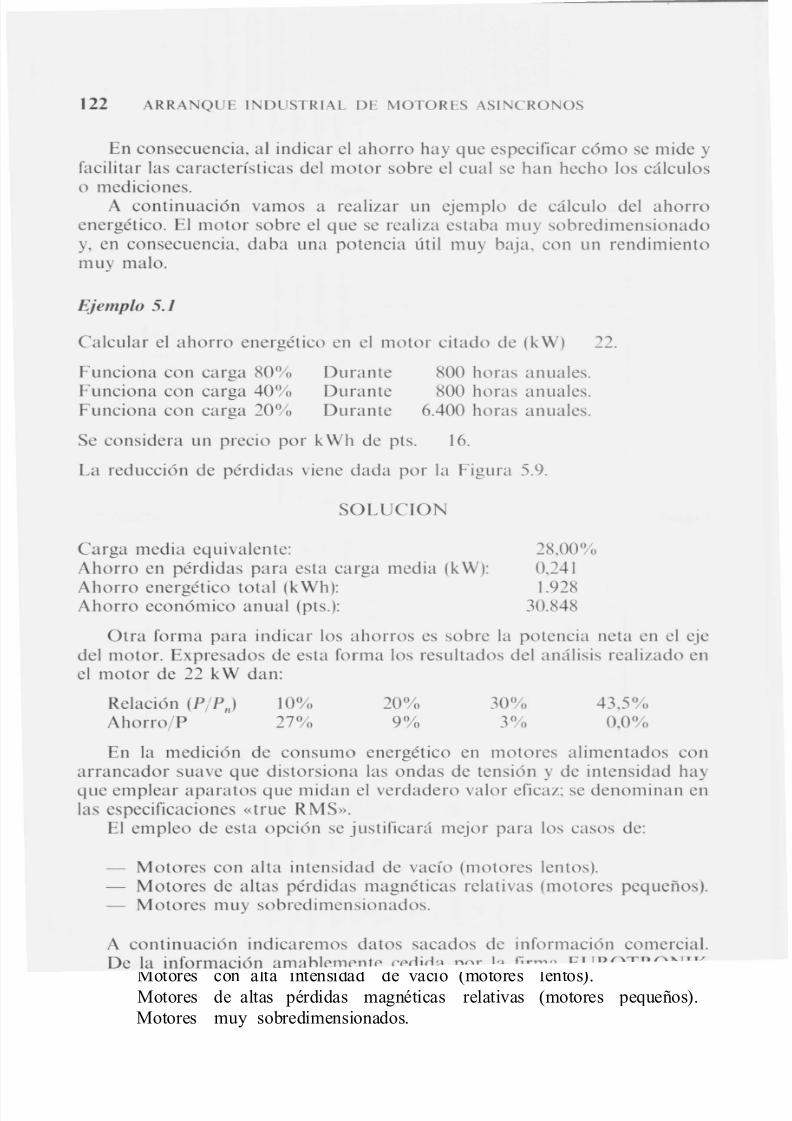
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 143/343
122 ARRA QUE 1 DUSTRIAL DE MOTORES ASI CRONOS
En consecuencia, al indicar el ahorro hay que especificar cómo se mide y
facilitar las características del motor sobre el cual se han hecho los cálculoso mediciones.A continuación vamos a realizar un ejemplo de cálculo del ahorro
energético. El motor sobre el que se realiza estaba muy sobredimensionadoy, en consecuencia, daba una potencia útil muy baja, con un rendimientomuy malo.
Ejemplo 5.1
Calcular el ahorro energético en el motor citado de (kW) 22.Funciona con carga 80%Funciona con carga 40%Funciona con carga 20%
DuranteDuranteDurante
800 horas anuales.800 horas anuales.
6.400 horas anuales.
Se considera un precio por kWh de pts. 16.
La reducción de pérdidas viene dada por la Figura 5.9.
SOLUCION
Carga media equivalente:Ahorro en pérdidas para esta carga media (kW):Ahorro energético total (kWh):Ahorro económico anual (pts.):
28,00%0,2411.928
30.848
Otra forma para indicar los ahorros es sobre la potencia neta en el ejedel motor. Expresados de esta forma los resultados del análisis realizado enel motor de 22 k W dan:
Relación (P/PII
)
Ahorro/P10%27%
20%9%
30%3%
43,5%0,0%
En la medición de consumo energético en motores alimentados conarrancador suave que distorsiona las ondas de tensión y de intensidad hayque emplear aparatos que midan el verdadero valor eficaz; se denominan enlas especificaciones «true RMS».
El empleo de esta opción se justificará mejor para los casos de:
Motores con alta intensidad de vacío (motores lentos).Motores de altas pérdidas magnéticas relativas (motores pequeños).Motores muy sobredimensionados.
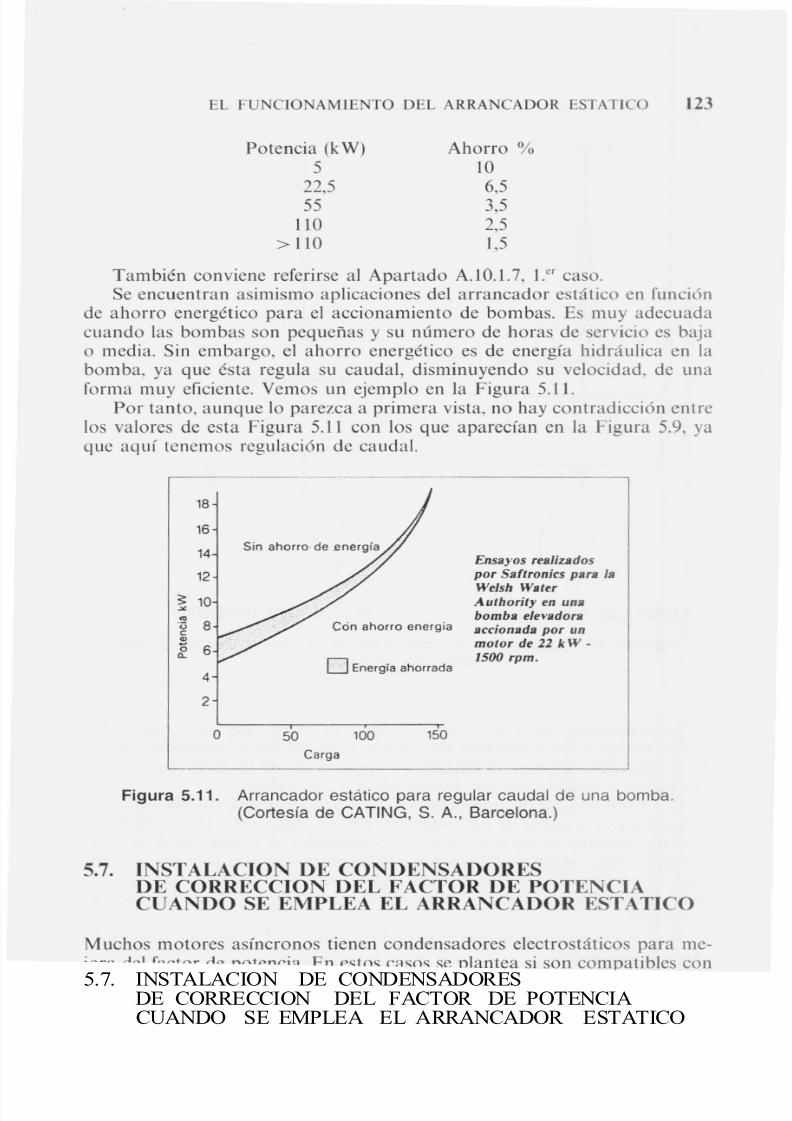
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 144/343
EL FUNClO AMIE TO DEL ARRANCADOR ESTATICO 123
Potencia (kW)
522,5
55
110
> 110
Ahorro %
106,53,52,5
1,5
También conviene referirse al Apartado A.IO.1.7, 1.er caso.Se encuentran asimismo aplicaciones del arrancador estático en función
de ahorro energético para el accionamiento de bombas. Es muy adecuadacuando las bombas son pequeñas y su número de horas de servicio es baja
o media. Sin embargo, el ahorro energético es de energía hidráulica en la bomba, ya que ésta regula su caudal, disminuyendo su velocidad, de unaforma muy eficiente. Vemos un ejemplo en la Figura 5.11.
Por tanto, aunque lo parezca a primera vista, no hay contradicción entrelos valores de esta Figura 5.11 con los que aparecían en la Figura 5.9, yaque aquí tenemos regulación de caudal.
Cón ahorro energia
DEnergía ahorrada
18
16
14
12
~ 10x
' " 8'0e~
6oa..
4
2
O 50
Carga
100 150
Ensa)'os realizados por Saftronics para laWelsh Water
Authority en unabomba elevadoraaccionada por unmotor de 22 kW·1500 rpm.
Figura 5.11. Arrancador estático para regular caudal de una bomba.(Cortesía de CATING, S. A., Barcelona.)
5.7. INSTALACION DE CONDENSADORESDE CORRECCION DEL FACTOR DE POTENCIACUANDO SE EMPLEA EL ARRANCADOR ESTATICO
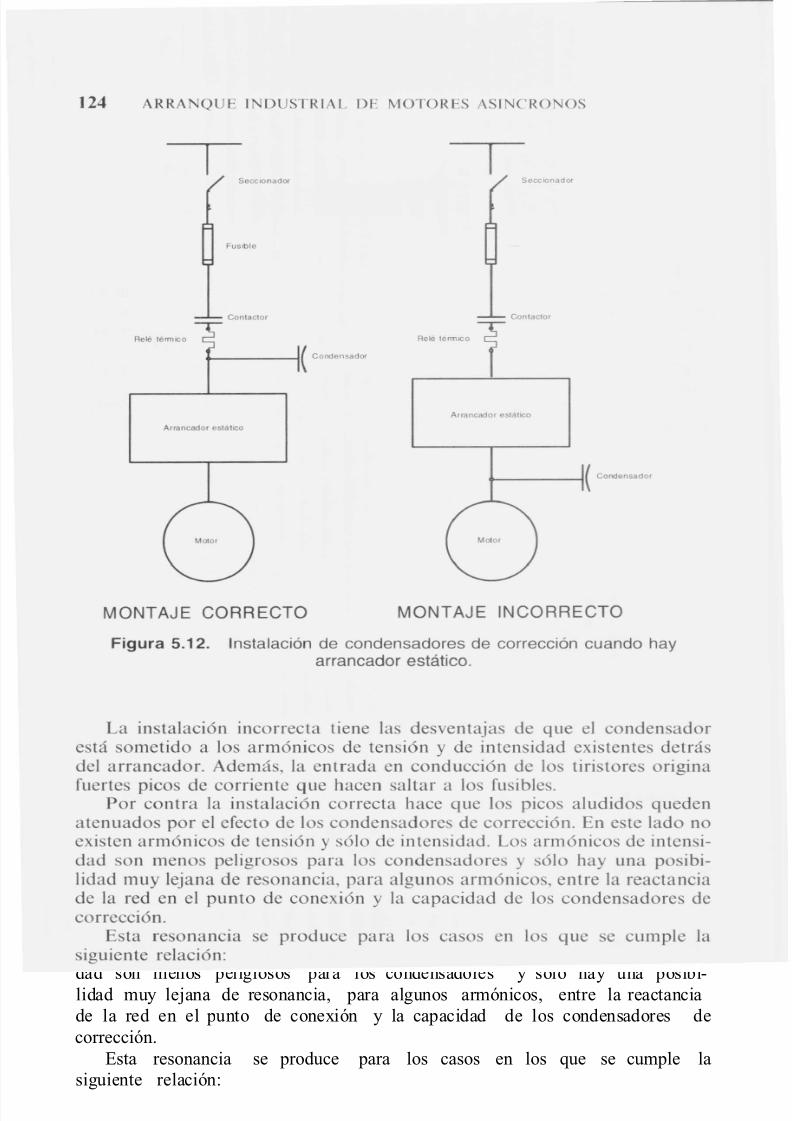
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 145/343
124 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Seccionador
Contactar
Arr ancado r estatl Co
Arr ancado r estahc o
MONTAJ E CORRECTO MONTAJ E I NCORRECTO
Figura 5.12. Instalación de condensadores de corrección cuando hay
arrancador estático.
La instalación incorrecta tiene las desventajas de que el condensador está sometido a los armónicos de tensión y de intensidad existentes detrásdel arrancador. Además, la entrada en conducción de los tiristores originafuertes picos de corriente que hacen saltar a los fusibles.
Por contra la instalación correcta hace que los picos aludidos quedenatenuados por el efecto de los condensadores de corrección. En este lado noexisten armónicos de tensión y sólo de intensidad. Los armónicos de intensi-
dad son menos peligrosos para los condensadores y sólo hay una posibi-lidad muy lejana de resonancia, para algunos armónicos, entre la reactanciade la red en el punto de conexión y la capacidad de los condensadores decorrección.
Esta resonancia se produce para los casos en los que se cumple lasiguiente relación:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 146/343
EL FUNCIONAMIENTO DEL ARRANCADOR ESTATICO 125
en la que:
k : Orden de la corriente armónica considerada.S k : Potencia de cortocircuito en el punto de conexión (kVAr).Q " : Potencia reactiva de la batería (kVAr).
Los valores de estas magnitudes que se encuentran usualmente son talesque no existe peligro de resonancia para las corrientes armónicas de órde-nes 5.0
, 7.° Y 11.° Sin embargo, si hay dudas, se debe de hacer la verificaciónque se acaba de indicar.
5.8. APLICACION DEL ARRANCADOR ESTA TIC OPARA EVITAR QUE LOS MOTORES FUNCIO ELARGOS PERIODOS EN VACIO
Hay accionamientos en los que los problemas del arranque sobre la red osobre el propio motor son tan importantes, que los usuarios minimizan losarranques no parando el motor nada más que una o dos veces al día, y permitiendo que el motor funcione en vacío en las pausas más cortas del
ciclo diario de producción. En instalaciones de grandes hornos que funcio-nan en plantas de proceso hay ventiladores que tienen este modo de opera-ción. Para estos casos el empleo del arrancador estático permite arrancar y parar muchas más veces, evitando el desperdicio de energía del motor y dela máquina funcionando en vacío. En el Ejemplo 5.2 veremos la justificaciónde los ahorros que son muy importantes.
Ejemplo 5.2
Ahorro energético en el ventilador de un horno.
Potencia del motor (kW): 560Consumo del motor con el ventilador cerrado (kW): 90Se considera un precio de kWh de pts.: 12 N úmero de ciclos diarios: 12Horas por ciclo: 1,50Parte del ciclo con ventilador cerrado (h): 0,40El ventilador se arranca únicamente al principio de la jornadaDías de producción anuales: 300
SOLUCION
Al adoptar el arrancador estático se arranca en todos los ciclos.
Tiempo de trabajo con ventilador cerrado (h):r_~_~:A Ah~rr"rl" (lrU(h\·
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 147/343
126 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
5.9. LA REDUCCIO DE LA POTENCIA ELECTRICA
CONTRATADA
Hemos visto que los arrancadores estáticos en sus diversos modos de con-trol reducen la intensidad absorbida de línea a valores que son mucho me-nores que los que absorbe el motor arrancando en directo a plena tensión.
La potencia eléctrica contratada tiene una importancia relevante en lafactura de muchos usuarios industriales. Esta circunstancia se da cuandoaparecen una o varias de las situaciones siguientes:
Hay unos pocos motores de potencia comparable a la del resto de lainstalación.Estos motores arrancan a plena tensión con bastante frecuencia.Los arranques tienen duración media o larga (5" a 60").Ciertos motores grandes han de arrancar simultáneamente.
Los maxímetros que emplean las compañías suministradoras de elec-tricidad para medir la potencia máxima tienen un tiempo de integraciónde 15', y si los arranques de ciertos motores grandes son de larga duración pueden influir en los valores obtenidos.
En consecuencia, el empleo de arrancadores estáticos ayuda a controlar el valor de la potencia máxima absorbida haciendo que se pueda disminuir el coste energético por reducción de la potencia contratada.
5.10. COMPORTAMIENTO DEL ARRANCADOR ESTATICOCON ARRANQUES SUCESIVOS
El arrancador estático tiene tiristores en los que se producen pérdidas
energéticas que incrementan su temperatura. tal como se ha visto en elApartado 5.5. El calentamiento es función de la corriente que circula y deltiempo de conexión. Durante un arranque depende de la intensidad dearranque y de la duración del mismo. Los tiristores se calientan rápida-mente, ya que son de poca masa y, en consecuencia, tienen constantes detiempo muy cortas, si las comparamos con las de los motores. Si lostiristores se calientan mucho hay que esperar a su enfriamiento antes deiniciar el nuevo arranque. Caracterizaremos el arranque mediante los valo-res siguientes:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 148/343
EL FU CIO AMIE TO DEL ARRANCADOR ESTATICO 127
En la Figura 5.13 se da el gráfico con el perfil de temperaturas en los
tiristores.A continuación, en la Figura 5.14, se incluyen nomogramas facilitados por un fabricante para un arrancador estático de 800 A nominales.
El manejo del nomograma es necesario para dos cuestiones princi- pales:
Determinar la duración de las pausas.Comprobar que el arrancador puede soportar un servicio.
Los arrancado res medianos y grandes tienen refrigeración forzada de lostiristores mediante ventiladores; en consecuencia, los nomogramas contem- plan esta posibilidad, como se aprecia en la figura.
Veamos un ejemplo de cálculo para ambas posibilidades en un arranca-dor de 800 A, cuyo nomograma térmico está en la Figura 5.14.
Sea un motor de 400 kW a 380 V Yque a plena carga absorbe 725 A; suintensidad de arranque directo es de 4.350 A.
Se desea verificar la pausa del arrancador en el caso de funcionamientosin la ventilación. El arrancador limita la punta a 3.000 A Y realiza el arran-
que en 30 segundos. En la parte 2 de la derecha se traza la recta que une3.000 A con 30 segundos, cortando a (jTm'íX en 0,845. Este valor se trans- porta a la escala de la parte Ia y se traza la recta que une la intensidadnominal del motor, 725 A, con 0,845, dando el tiempo de pausa de 3.200 se-gundos.
Finalmente verificaremos si una pausa de 700 segundos con la ventila-ción funcionando es posible. Sobre 1b se traza la recta entre la intensidadnominal de 725 A Y esta pausa de 700 s. Corta a (jTm;\x en 0,95. Este valor se lleva a la parte 2 del nomograma y se une con el tiempo de arranque
T
L lTm a x
L IT
68
85
Tamb
100%
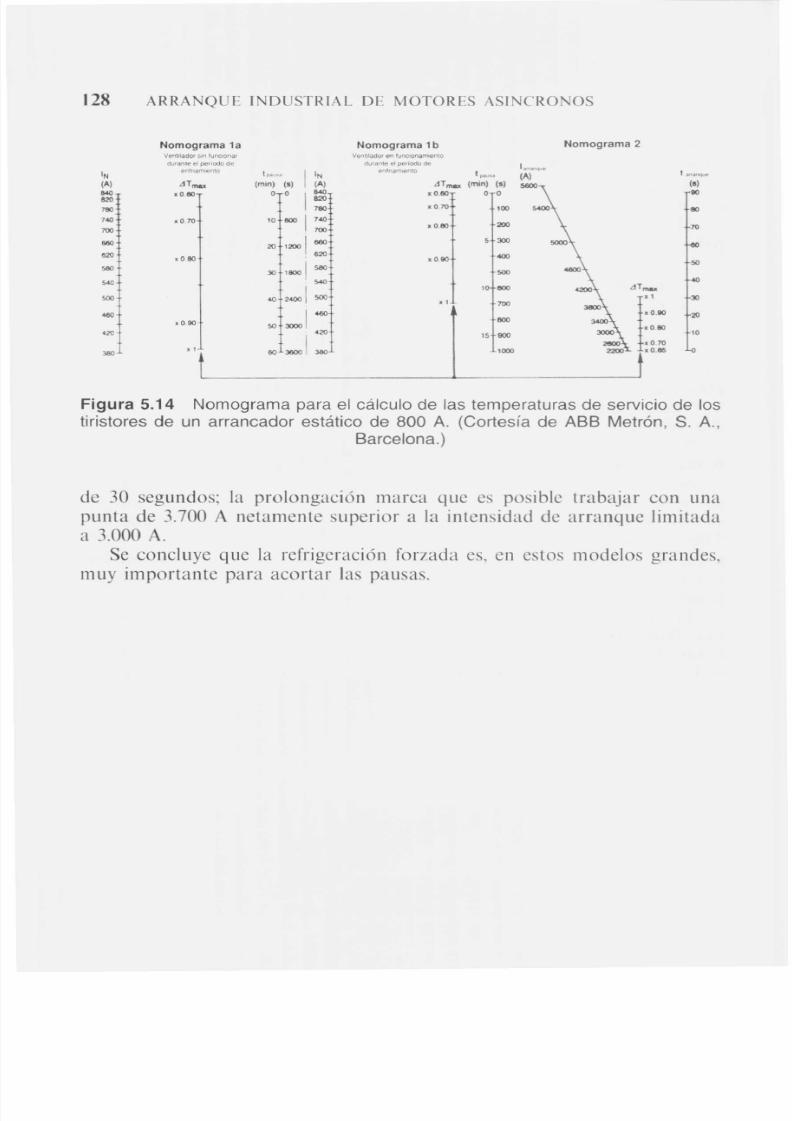
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 149/343
128 ARRANQUE I DUSTRIAL DE MOTORES ASINCRONOS
No mo gr am a l a Nomograma 1b No mo gr am a 2
VentriaOors,ntUlloonar Ventlladol e/1tUrlCronam'cnlO
dVfilnle el pellodo de durante el Pól"odo de
1 " , • . • " " " "IN enl"am,.mlo 1",",'"
1
IN enlf1am,emo l~~ (A)
,--lA) dT •••• (mln) (s) (A) .dT mu (min) (5) 5600 (1)
• • • ,oeo ° ° 1 : l I :oeo
° ° 00
120
780 '0'" '00 00
740 ,070 '0 e o o l : 200700
.000 70
680 1200 1 6605 300
20
620 .oeo 620,000 400
1800 1 58050
580:lO 500
540 540 40
2400 1 500
1 eo o dT••••
500 40
r
:lO,1 700
«lO
: lOOO1
«lO
1
.0.10 20.090- eo o
50 ,000'20
~I: 15 000 10
,070J80 "
t 60 1000 ( lO
Figura 5.14 Nomograma para el cálculo de las temperaturas de servicio de los
tiristores de un arrancador estático de 800 A. (Cortesía de ABB Metrón, S. A.,
Barcelona.)
de 30 segundos; la prolongación marca que es posible trabajar con una
punta de 3.700 A netamente superior a la intensidad de arranque limitadaa 3.000 A.
Se concluye que la refrigeración forzada es, en estos modelos grandes,muy importante para acortar las pausas.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 150/343
CAPITULO
SEIS
INFLUENCIA DE LA REDEN EL ARRANQUE
Hasta ahora hemos considerado las características de par y corriente delmotor asíncrono para el caso de tensión en bornas constante, y así dan estascaracterísticas los catálogos o especificaciones de motores. Para poder con-siderar la tensión como constante es preciso que la red de alimentacióntenga una potencia o capacidad muy alta frente a la corriente del motor aconectar y, en consecuencia, las corrientes absorbidas en el punto de cone-xión no inl1uyen sobre la red y no se producirán caídas de tensión aprecia- bles. Sin embargo, en la mayoría de los casos el motor se alimenta con unared de capacidad finita o limitada.
6.1. CAPACIDAD DE LA RED
La capacidad de una red en un punto determinado de la misma es una propiedad que dependerá de su topología mirada desde ese punto, y de lasimpedancias desde el mismo a través de las diversas ramas que llevan hastalos generadores. Las capacidades, pues, son diferentes en los distintos pun-tos de una red interconectada, como la que existe en la mayoría de los países avanzados. La capacidad de la red en un punto será tanto mayor cuanto mayor sea la potencia de los alternadores que la alimentan, cuantomenores sean las caídas de tensión propias de aquellos generadores y cuan-to menores sean las caídas de tensión que existen entre los alternadores y el
punto considerado.Por tanto, en las redes de transporte de los países avanzados (200 kV y
más), las caídas de tensión son pequeñas, pues existen pocos transformado-res interpuestos, ya que las corrientes que circulan por ellas son pequeñas.Por ello podremos afirmar que la capacidad en puntos de la red de trans--~_.~ " '~"" nI.,> t<>nc;Án PC ITlIIV plpv::ln::l P o inclllSO. a falta de datos, se toma
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 151/343
130 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Sin embargo, a medida que nos acercamos ya en la red de distribución
a tensiones medias o bajas, empezamos a tener las caídas de tensión delos transformadores de los diversos escalones de tensión junto con la de laslíneas que los unen.
Estas caídas de tensión hacen que en cuanto el receptor de energíaeléctrica (motor asíncrono en nuestro caso) absorbe corriente, la tensión en bornas ya no es la nominal sino menor. Como las caídas de tensión enlíneas y transformadores son proporcionales a la corriente que circula, serepresentan mediante reactancias lineales, ya que en estos componentes lacaída óhmica es despreciable frente a la inductiva y, además, está en cua-
dratura.La capacidad de una red en puntos específicos de la misma es un valor que lo puede dar la compañía suministradora. Es un valor aproximado yvariable que depende de la configuración topológica de la red y de losgeneradores y cargas conectados en cada momento.
La capacidad de una red en un punto dado se expresa en MVA (Mega-voltamperios) y se define como la potencia aparente en MV A que produci-ría en él una disminución de tensión del 100%; es decir, que la tensiónen ese punto caería al valor cero. Se la denomina también capacidad de
cortocircuito. Esta última designación viene de que en un cortocircuito latensión cae a cero. Se puede expresar también en kVA, pero el empleo dela unidad M VA es porque las potencias de cortocircuito son altas.
La capacidad es más alta en los puntos de la red de transporte y más baja en los de las redes de distribución disminuyendo a medida que nosalejamos de las redes de más alta tensión.
Presentemos un ejemplo sencillo. Si se conecta en un punto de una redcon capacidad de 200 M VA y tensión de 30.000 V, una carga de 1.000 kVA,la caída de tensión será:
1.000 kVA---- x 30.000 V200 MVA
1.000 kVAx 30.000 V
200.000 kVA 150 V
Como el fenómeno es lineal, una carga diez veces mayor daría lugar auna caída de tensión diez veces mayor.
La capacidad de la red se modeliza, pues, por una reactancia lineal puesta en serie con el circuito equivalente del motor, y que tendrá el valor:
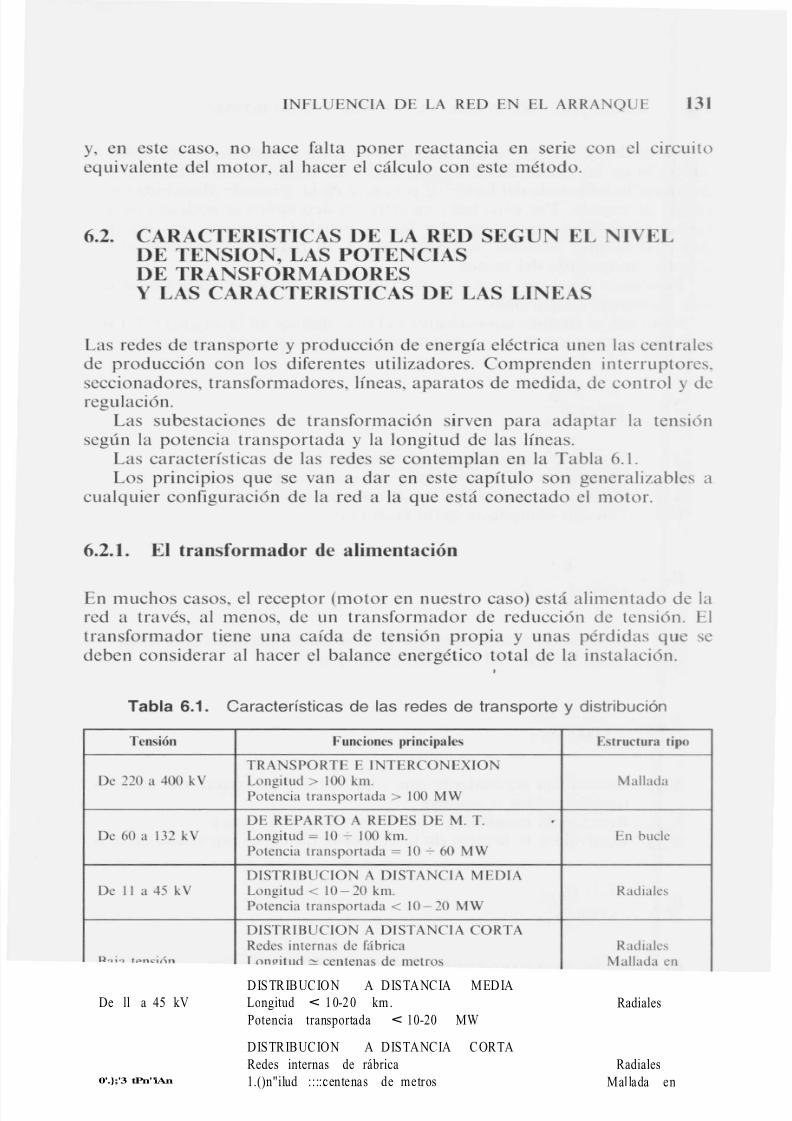
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 152/343
[ FLUENCIA DE LA R ED EN EL ARRANQUE 131
y, en este caso, no hace falta poner reactancia en serie con el circuito
equivalente del motor, al hacer el cálculo con este método.
6.2. CARACTERISTICAS DE LA RED SEGUN EL NIVELDE TENSION, LAS POTENCIASDE TRANSFORMADORESY LAS CARACTERISTICAS DE LAS LI EAS
Las redes de transporte y producción de energía eléctrica unen las centralesde producción con los diferentes utilizadores. Comprenden interruptores,seccionadores, transformadores, líneas, aparatos de medida, de control y deregulación.
Las subestaciones de transformación sirven para adaptar la tensiónsegún la potencia transportada y la longitud de las líneas.
Las características de las redes se contemplan en la Tabla 6.l.
Los principios que se van a dar en este capítulo son generalizables acualquier configuración de la red a la que está conectado el motor.
6.2.1. El transformador de alimentación
En muchos casos, el receptor (motor en nuestro caso) está alimentado de lared a través, al menos, de un transformador de reducción de tensión. Eltransformador tiene una caída de tensión propia y unas pérdidas que sedeben considerar al hacer el balance energético total de la instalación.
Tabla 6.1. Características de las redes de transporte y distribución
Tensión Funciones principales Estructura tipo
T RA NSP ORTE E IN TERC O EX ION
De 220 a 400 kV Longitud> 100 km. Mallada
Potencia t ransportada> 100 MW
DE REPARTO A REDES DE M. T.
Dc 60 a 132 kV Longitud = 10 -'- 100 km. En bucle
Potcncia transportada = 10760 MW
D IS TR IB UC IO N A D IS TA NC IA M ED IA
De ll a 45 kV Longitud < 1 0-2 0 km . Radiales
Potencia transportada < 10-20 MW
DISTRIBUCION A DISTANCIA CORTA
Redes internas de rábrica Radiales0'.};'3 tPn"iAn 1.()n"ilud :::::centenas de metros Mallada en

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 153/343
132 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La caída de tensión la estudiaremos de forma simplificada mediante la
adopción de la reactancia de cortocircuito del transformador. Este estudiodesprecia la inf1uencia del factor de potencia de la corriente absorbida en lascaídas de tensión. Por otro lado, en estudios detallados se podrán conside-rar las pérdidas del transformador fijas o variables, mediante dos resisten-cias equivalentes situadas, respectivamente, en paralelo y en serie con elcircuito equivalente del motor.
Podremos tener en cuenta la corriente de vacío del transformador conuna reactancia en paralelo.
Visto así, el circuito cquivalente es el que aparece en la Figura 6 .1 . En él
se definen las reactancias y resistencias características del siguiente modo:
u2. X TR
1.000,STR
: Reactancia equivalente (Ohmios): Reactancia de cortocircuito del transformador (p.u.): Potencia aparente del transformador (kVA)
: Tensión compuesta entre fases (V)
u 2
1.000· STR' P F TR
RF Resistencia equivalente que representa las pérdidas fijas (Ohmios)PFTR: Pérdidas fijas del transformador (p.u.)
u2. X MR
1.000· S T R
X MT : Rcactancia equivalente que representa la corriente de vacío deltransformador (Ohmios)
X M R : Rcactancia magnetizante del transformador (p.u.)X M R : Equivale a la inversa de la corriente de vacío expresada en (p.u.)
U 2 ,PVTR
1.000· STR
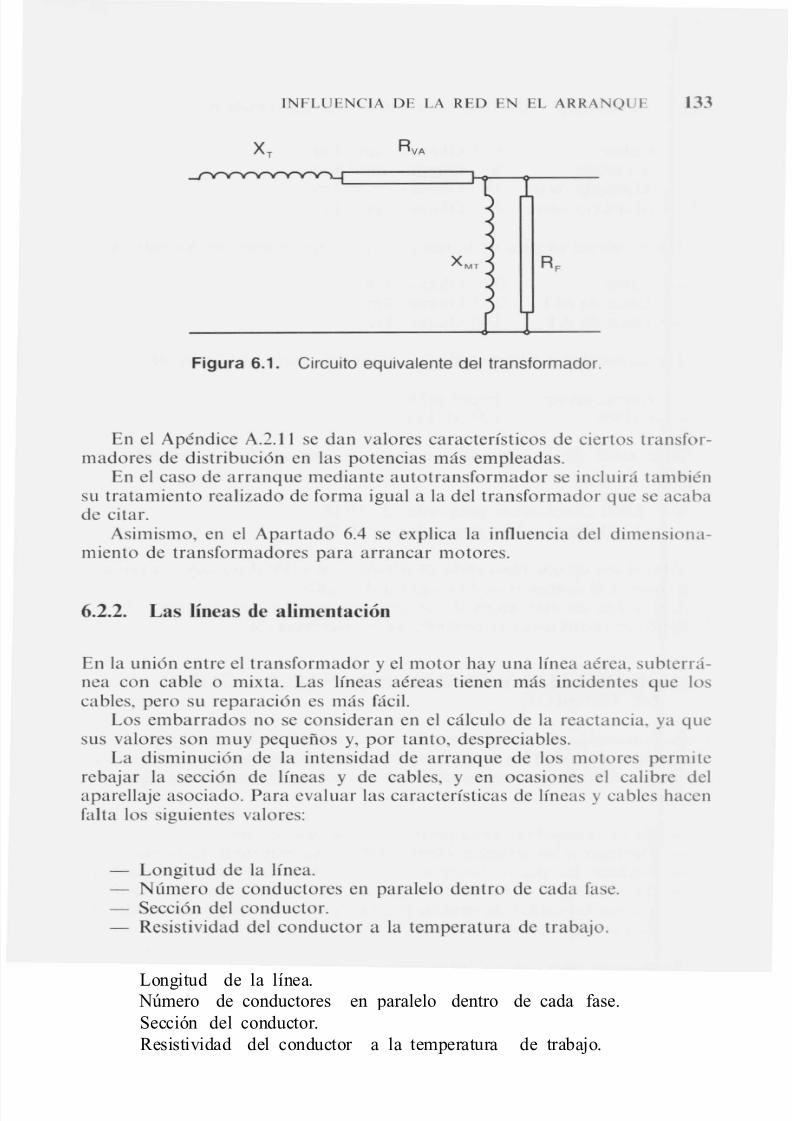
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 154/343
INFLUENCIA DE LA R ED EN EL ARRANQUE 133
Figura 6.1. Circuito equivalente del transformador.
En el Apéndice A.2.11 se dan valores característicos de ciertos transfor-madores de distribución en las potencias más empleadas.
En el caso de arranque mediante autotransformador se incluirá tambiénsu tratamiento realizado dc forma igual a la del transformador que se acaba
de citar.Asimismo, en el Apartado 6.4 se explica la influencia del dimensiona-miento de transformadores para arrancar motores.
6.2.2. Las líneas de alimentación
En la unión entre el transformador y el motor hay una línea aérea, subterrá-nea con cable o mixta. Las líneas aéreas tienen más incidentes que loscables, pero su reparación es más fácil.
Los embarrados no se consideran en el cálculo de la reactancia, ya quesus valores son muy pequeños y, por tanto, despreciables.
La disminución de la intensidad de arranque de los motores permiterebajar la sección de líneas y de cables, y en ocasiones el calibre delaparellaje asociado. Para evaluar las características de líneas y cables hacenfalta los siguientes valores:
Longitud de la línea. Número de conductores en paralelo dentro de cada fase.Sección del conductor.Resistividad del conductor a la temperatura de trabajo.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 155/343
134 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Cobre
AluminioAluminio duroAluminio-acero
18,5 Ohmios· mm2/km
30 Ohmios· mm2
/km33 Ohmios· mm2/km36 Ohmios· mm2/km
U nos valores medios de la reactancia por fase suelen ser los siguientes:
CableLínea de MTLínea de AT
O,IOOhmios/km0,35 Ohmios/km0,40 Ohmios/km
Las capacidades transversales o en paralelo por fase suelen ser:
Líneas aéreasCables
despreciable0,20 ¡LF/km
Este valor de la capacidad conduce a una reactancia capacitiva en paralelo de:
16.000 Ohmios/km para redes de 50 Hz13.200 Ohmios/km para redes de 60 Hz
Al tratarse de una reactancia en paralelo, su valor disminuye en propor-ción inversa al aumento de la longitud del cable.
Los datos de este apartado se complementan en el Apéndice A.2.12.También se recomienda la consulta de la referencia (5).
6.3. PROBLEMAS Y LIMITACIO ES DE LA CAlDADE TENSION
Otros consumidores conectados a la red se ven afectados por las caídas detensión que provocan los motores al arrancar. Las compañías distribuidorasde energía eléctrica limitan las caídas de tensión en atención a los siguientesreq uisi tos:
Evitar maniobras intempestivas de los contactores.Proteger a los sistemas electrónicos de su mal funcionamiento.Reducir los efectos nocivos y de falta de confort en el alumbrado.Tratar de que otros motores que están en funcionamiento no sufran,ya que las caídas de tensión producen más deslizamiento, absorciónde corriente y calentamiento.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 156/343
INFLUENCIA DE LA RED EN EL ARRANQUL 13 5
permanece constante durante la caída de tensión, por lo que las intensidades
evolucionan en función inversa de la tensión.Como en el arranque hay altas corrientes inductivas en retraso, no hay peligro de autoexcitaciones originadas por los bancos de condensadoresinstalados para corregir el factor de potencia, bien sea global o en bornasdel motor.
La mayor parte de los motores grandes, que son los candidatos poten-ciales a dar arranques difíciles, están en fábricas importantes. Se conectan, por tanto, en escalones de tensión que tienen potencia de cortocircuitosuficien te.
En los estudios simplificados, los diversos elementos de la red (líneas,transformadores, otros motores ...) se consideran como inductivos sin efectode resistencia.
A continuación damos las caídas de tensión admitidas por Electricité deFrance en sus redes.
Tabla 6.2. Valores máximos de las caídas de tensión brusca admitidas en el
punto de conexión de un usuario
Caída máxima respecto a la Máximo número de caídastensión nominal bruscas por hora
5,00% 94,00% 203,00% 502,20% 100
En el caso de motores grandes, las medidas principales para evitar lascaídas de tensión son:
Elevar la tensión secundaria de los transformadores de alimentación,siempre que los otros aparatos lo toleren.Aplicar modos de arranque con corriente reducida.Conectar estos motores a los niveles de tensión más altos quesean posibles. En España existe el escalón normalizado de tensiónen 6 kV. Sin embargo, conviene saber que con algo de sobreprecio es posible obtener motores asíncronos en tensiones de 11-13,8 kV.
6.4. CALCULO PRACTICO DE UNA RED PARA VER LA INFLUENCIA DEL ARRANQUE DE MOTORES

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 157/343
136 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
CargaC
30 kV
Línea A
Potencia de
cortocircUito 45 MVA
líneaS
Carga D
TransfoF
400V
Sistema de.
arranque 6 ' . . .
Motor E
Figura 6.2. Esquema de la red para el estudio del arranque.
Los datos de cálculo est~ln dados por el Ejemplo 6.1.
Ejemplo 6.1
Estudio del arranque del motor en la red de la Figura 6.2.
FICHA DE DATOS DE LOS EQUIPOS
Potencia cortocircuito del sistema (M VA) 45U1ill(V) 30.000 U",or(V) 400Línea A· X (Ohm) 6,50Línea B· X (Ohm) 2,20
Carga C 2.700 kW cos < p 0,850Carga D 280 kW cos < p 0,900Motor E de 400 kW cos < p 0,910Rendimiento 95,30% /aI/N 6,30 C a l C N 1,2CI1l,h/C N 2,50 cos < p arranque 0,20Acciona ventilador 62.50 k Q · m2 P:u op<:n ()?<:; nn
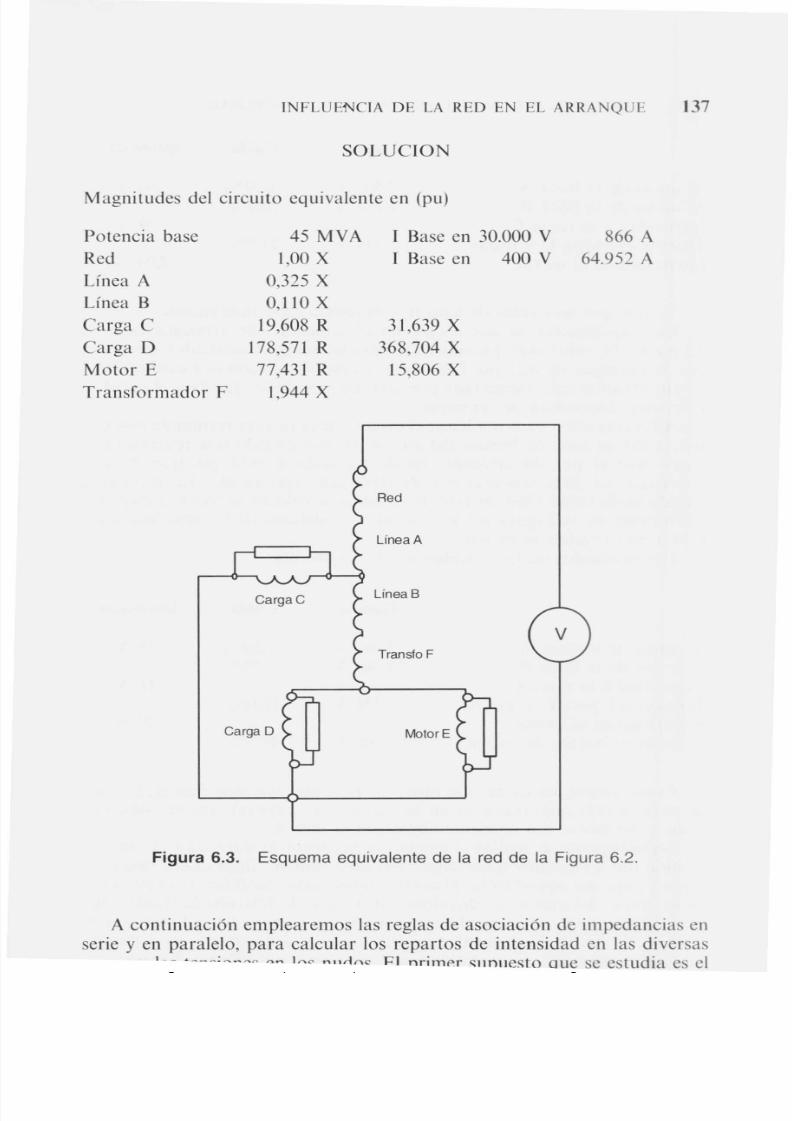
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 158/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 159/343
138 ARRANQUE ¡ND STRIAL DE MOTORES ASINCRO OS
Tensión Caída Intensidad
Al inicio de la línea A 27.507 V 8,31% 86 AAl inicio de la línea B 26.718 V 10,9%Intensidad a la rama e 39 ATensión BT para D y motor 314 V 21,5%Intensidad en el motor 4,94 pu
Vemos que las caídas de tensión son muy altas e inadmisibles.En consecuencia, el par motor en el momento de arranque baja de
1,2 pu a 0,74, valor más que suficiente para arrancar al ventilador, que exige par de despegue de 0,25 pu. Las fuertes caídas de tensión son inadmisibles,ya que el motor está alimentado por una red muy débil, que hace el papel dereactancia limitadora de arranque.
A continuación vamos a hacer el cálculo de la mejora resultante con unareactancia en serie en bornas del motor. Hemos elegido una reactancia demodo que el par de arranque quede reducido a 0,32 pu, que da unacobertura del 28% sobre el par de despegue especificado. La reactanciaelegida es de 0,035 Ohmiosjfase. Para hacer el cálculo se toma el esquema
equivalente de la Figura 6.3 y se añade por delante de la impedancia delmotor esta reactancia en serie.Los resultados de los cálculos son los siguientes:
Tensión Caída Intensidad
Al inicio de la línea A 27.997 V 6,68% 73 AAl inicio de la línea B 27.365 V 8,78%Intensidad a la rama
e 41 A
Tensión BT para D y motor 336 V 16,0%Intensidad en el motor 3,25 puTensión en bornas de motor 206 V 48,5%
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 160/343
INFL U E C IA D E L A R ED EN EL A RR AN QU E 139
Tensión Caída Intensidad
Al inicio de la línea A 28.398 V 5,34% 65 AAl inicio de la línea B 27.898 V 7,00%Intensidad a la rama C 45 ATensión BT para D y motor 354 V 11,5%Intensidad en el motor 1,88 puTensión en bornas de motor 206 V 48,5%
Como vemos, las caídas son mucho menores y admisibles tratándose deuna red tan débil. La baja tensión aplicada al motor lo es gracias al efecto
del autotransformador. La corriente total absorbida es bastante menor y, por contra, la aplicada a la rama C sigue creciendo, con lo cual su potenciase acerca a la nominal para esta rama.
Para terminar analizamos el empleo de un arrancador estático. Segui-mos con el mismo par de arranque como objetivo, lo que nos conduce a quela tensión inicial de salida del arrancador ha de ser L i = 0,61 de la existenteen bornas de entrada al arrancador. El arrancador modifica la impedanciadel motor dividiéndola por L i.
Los resultados de los cálculos son los siguientes:
Tensión Caída Intensidad
Al inicio de la línea A 28.004 V 6,65% 74 AAl inicio de la línea B 27.376 V 8,75%Intensidad a la rama C 42 ATensión BT para D y motor 336 V 16,0%Intensidad en el motor 3,23 puTensión en bornas de motor 206 V 48,5%
Observamos que los valores de caídas de tensión y las corrientes absor- bidas no son tan buenos como en el caso de autotransformador. Sin embar-go, se puntualiza que el cálculo de las corrientes y de las caídas de tensión essólo un aspecto, aunque importante, del problema. Así, por ejemplo, se hanvisto otras propiedades en el Apartado 4.1.5; entre ellas indicamos que losarrancadores estáticos varían la tensión continuamente. Esto no lo hace elautotransformador, uno con dos escalones, muy costoso y complicado, nollega a las prestaciones de regulación de tensión del arrancador estático.
6.5. METODOS DE ARRANQUE PARA PUNTOSDEBILES DE LA RED
1 ~- - •• ~.~~ rl6h;lp~ t1P b<: rp.nes. con caDacidad de cortocircuito insuficiente,
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 161/343
140 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
evaluar la potencia aparente de un motor en el momento del arranquehabrá que realizar el cálculo siguiente:
en la que:
Sarranquc
P'(Ia!IN)
/]. cos < P
Sarranquc: Potencia aparente del motor en arranque (kVA)
P Potencia nominal del motor (kW)la! I N Relación de corriente de arranque a la nominal (pu)/] Rendimiento nominal del motor (pu)cos < p Factor de potencia nominal del motor (pu)
En estas situaciones, tal como se ha visto en el Apartado 6.4, las caídasde tensión son tan importantes que conllevan reducciones adicionales de par motor y el arranque se hace de gran duración, llegando a ser imposible.Para solucionarlo tenemos las siguientes alternativas:
Caso de par resistente despreciable. Es la mejor situación y podre-mos, mediante la aplicación de métodos de reducción de tensión en
bornas de tensión, disminuir la intensidad de arranque. De entreestos métodos señalamos los siguientes:
Autotransformador. La disminución de par y de corriente sonsemejantes; por tanto, el índice de arranque se mantiene. Por con-tra tiene la desventaja de su poca capacidad de regulación .
• Estrella-triángulo. Idéntico al anterior, y mantiene el índice dearranque, pero la relación es fija 1/3 para la disminución de par eintensidad.
• Arraneador estático. En este caso el par disminuye más rápida-mente que la intensidad y puede que su bajada sea tan importanteque no pueda arrancar a la carga. El índice de arranque baja. Es,sin embargo, de regulación continua durante el proceso.
Caso de par resistente despreciable y altas inercias. Estamos ante unasituación similar a la citada arriba.Caso de par resistente importante. Ahora es necesario que el índicede arranque mejore. Las únicas soluciones posibles en este caso son:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 162/343
I FL U ENCIA D E L A R ED EN EL A R R ANQU E 141
6.6. EL ARRANQUE DEL MOTOR ASINCRONO
CONTRA UN ALTERNADOR DE EMERGENCIAO EN UN A RED EN ISLA
En los casos en los que una planta con generadores de emergencia quedadesconectada de la red pública de suministro eléctrico, y cuando se precisaarrancar ciertos motores eléctricos, estamos ante dificultades importantes.La potencia de cortocircuito es muy reducida frente a la potencia aparentedel motor que se va a arrancar. Además, existe la circunstancia de que la potencia mecánica de los motores o turbinas que accionan los alternadores
de emergencia es también limitada; en consecuencia, se produce una dismi-nución de velocidad de estos grupos con la consiguiente bajada de frecuen-cia. Los reguladores que corrigen el punto de funcionamiento de las turbi-nas tienen constantes de tiempo del orden de algunos segundos, y resultanexcesivas frente a la duración del arranque del motor.
En estos casos hay que proceder a un análisis dinámico del sistemacompleto desde las turbinas a los motores que se van a arrancar y sus má-quinas accionadas. En este análisis son decisivas las características diná-micas de:
Los reguladores de potencia-velocidad de las turbinas o motores queaccionan a los alternadores de emergencia.Los reguladores de tensión y equipos de excitación de estos alterna-dores.
Adcmás las inercias rotacionales (véase Apartado 2.3.2) de todo el siste-ma mecánico de turbinas, generadores, motor a arrancar y máquina accio-nada juegan un papel primordial. Así pues, durante la deceleración suminis-
tran potencia mecánica al sistema y dan tiempo a actuar a los reguladoresde potencia-velocidad.
Este análisis se sale del marco de este libro. En la referencia (6), el lector puede encontrar el método de simulación.
Hay un cálculo simplificado que estudia el primer instante del arranquey cuya aplicación conduce a estimaciones conservadoras de la posibilidadde arranque de motores determinados en una planta aislada de la red con potencia proporcionada por generadores de emergencia. El método estádesarrollado en la referencia (7).
Es preciso conocer las características eléctricas de los generadores deemergencia y de los motores a arrancar, y la de otras cargas eléctricas pre-sentes en la planta.
Para la representación del generador se recurre a su reactancia subtran-sitoria X / o El concepto de esta reactancia se explica en cualquier libro quetnltp rip m:óÍnllinas síncronas rvéase referencia (8)]. Indicaremos qué es la
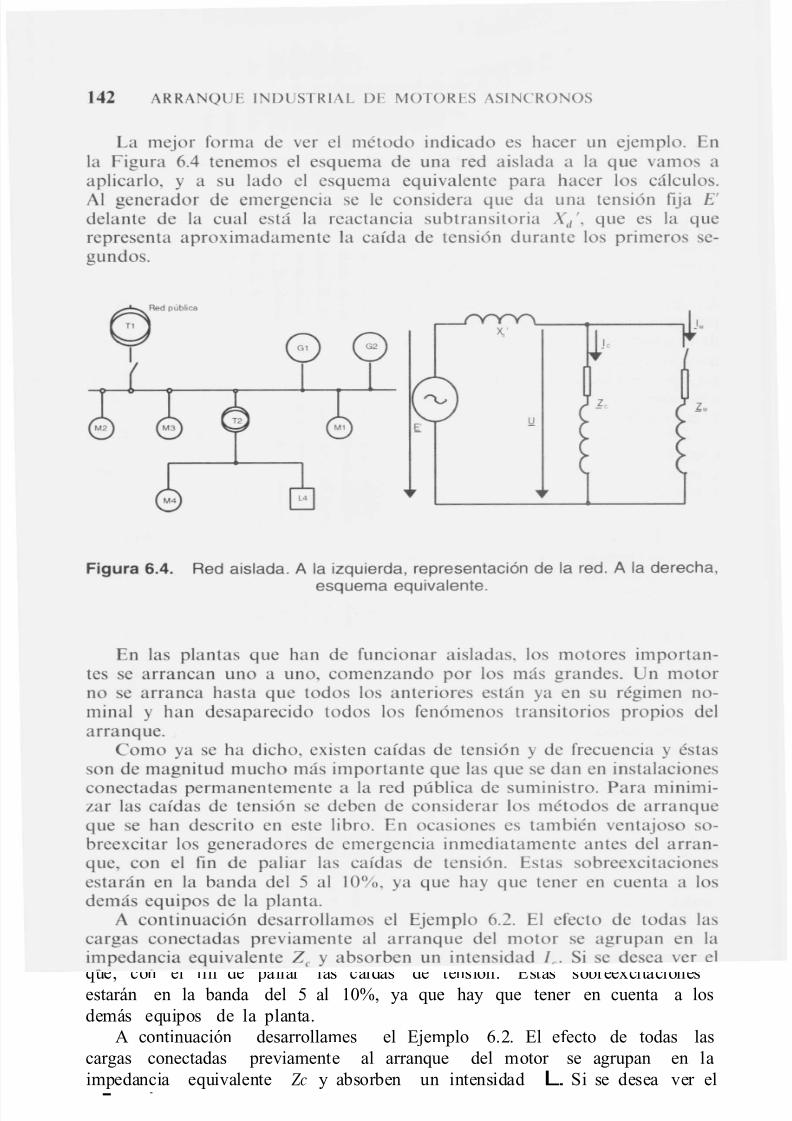
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 163/343
142 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La mejor forma de ver el método indicado es hacer un ejemplo. Enla Figura 6.4 tenemos el esquema de una red aislada a la que vamos aaplicarlo, y a su lado el esquema equivalente para hacer los cálculos.Al generador de emergencia se le considera que da una tensión fija E'
delante de la cual está la rcactancia subtransitoria Xd', que es la querepresenta aproximadamente la caída de tensión durante los primeros se-gundos.
ARedPubhca
~ I
Figura 6.4. Red aislada. A la izquierda, representación de la red. A la derecha,esquema equivalente.
En las plantas que han de funcionar aisladas, los motores importan-tes se arrancan uno a uno, comenzando por los más grandes. U n motor
no se arranca hasta que todos los anteriores están ya en su régimen no-minal y han desaparecido todos los fenómenos transitorios propios delarranque.
Como ya se ha dicho, existen caídas de tensión y de frecuencia y éstasson de magnitud mucho más importante que las que se dan en instalacionesconectadas permanentemente a la red pública de suministro. Para minimi-zar las caídas de tensión se deben de considerar los métodos de arranqueque se han descrito en este libro. En ocasiones es también ventajoso so- breexcitar los generadores de emergencia inmediatamente antes del arran-
que, con el fin de paliar las caídas de tensión. Estas sobreexcitacionesestarán en la banda del 5 al 10%, ya que hay que tener en cuenta a losdemás equipos de la planta.
A continuación desarrollames el Ejemplo 6.2. El efecto de todas lascargas conectadas previamente al arranque del motor se agrupan en laimpedancia equivalente Zc y absorben un intensidad L. Si se desea ver el
. -
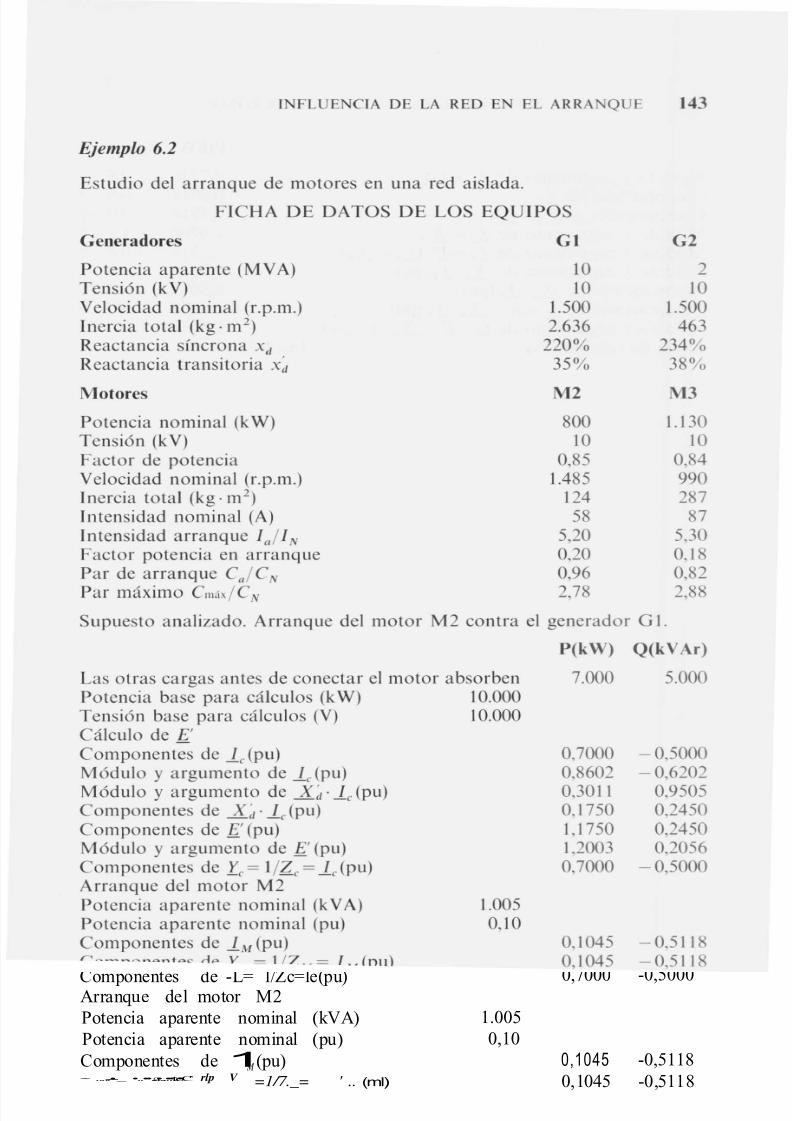
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 164/343
lNFLUE ClA DE LA RED EN EL ARRA QUE 143
Ejemplo 6.2
Estudio del arranque de motores en una red aislada.
Potencia aparente (MV A)Tensión (kV)Velocidad nominal (r.p.m.)Inercia total (kg· m 2 )
Reactancia síncrona xd
Reactancia transitoria x~
Generadores
FICHA DE DATOS DE LOS EQUIPOS
Gl
10
101.5002.636
220%35%
G2
2
101.500
463
234%38%
Motores
Potencia nominal (kW)Tensión (kV)Factor de potenciaVelocidad nominal (r.p.m.)]nercia total (kg· m 2 )
]ntensidad nominal (A)1ntensidad a rranq ue 1a l 1 N
Factor potencia en arranquePar de arranque Ca/C NPar máximo C m jx /C N
M2
80010
0,851.485
124
585,200,200,962,78
M3
1.13010
0,84990287
875,300,180,822,88
Supuesto analizado. Arranque del motor M2 contra el generador G 1.
P(kW) Q(kVAr)
Las otras cargas antes de conectar el motor absorben 7.000 5.000
Potencia base para cálculos (kW) 10.000Tensión base para cálculos (V) 10.000Cálculo de ¡ ; ¡ 'Componentes de le (pu) 0,7000 -0,5000Módulo y argumento de L.(pu) 0,8602 -0,6202Módulo y argumento de X~· le (pu) 0,3011 0,9505Componentes de X;¡· le(pu) 0,1750 0,2450Componentes de ¡ ; ¡ ' (pu) 1,1750 0,2450Módulo y argumento de ¡ ; ¡ ' (pu) 1,2003 0,2056
Componentes de -L= l/Zc=le(pu) 0,7000 -0,5000Arranque del motor M2Potencia aparente nominal (kVA) 1.005Potencia aparente nominal (pu) 0,10Componentes de1 M (pu) 0,1045 -0,5118~ .....•---_ •..••..•...•a .•...•toC' rlp V =1/7._= ' .. (ml) 0,1045 -0,5118
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 165/343
144 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Módulo y argumento de Z"["= 1IXIComponentes de Z"["Componentes de Z"["+X~
Módulo y argumento de Zr+ X~
Módulo y argumento de 1."["= [/I(Z"[" + X,¡ jMódulo y argumento de X ; / 0 LI' (pu)Componentes de X~olT(pu)
Componentes de U = Ji ' - X ; / o L r (pu)Módulo y argumento de U = Ji ' - X;¡OlT(pu)
Caída de tensión (%) 13,22%
P(kW)
0,77360,48140,48141,07001,12180,39260,30720,86780,8678
Q(kYAr)
0,89910,60550,95551,1041
-0,89850,67230,24450,00050,0006
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 166/343
CAPITULO
SIETEDESCRIPCION DE LOS EQUIPOS
DE ARRANQUE
Vamos a dedicar este capítulo a la descripción de los equipos empleados enlos diferentes modos de arranque estudiados en el capítulo anterior. Losequipos son muy variados y cada uno de ellos está formado por una
asociación más o menos compleja de componentes que coordinadamenterealizan las funciones que corresponden a los distintos modos de arranque.En la mayor parte de los casos éstos se repiten en unos y otros equipos dearranque. Por esta razón vamos a realizar una descripción a nivel decomponentes, dedicando menor espacio al final del capítulo a los conjuntosque son poco numerosos. En realidad, el técnico encargado del diseño yrealización de un modo de arranque determinado para un accionamientohace una especificación de todos y cada uno de los componentes, y losmismos se instalan de tal forma que puedan cumplir las funciones que elmodo de arranque requiere.
Este capítulo no pretende ser exhaustivo, y para su redacción se hahecho uso profuso de la documentación técnica y comercial de las firmasofertantes en este campo. El técnico que desee estar al día en arranque demotores deberá de conseguir un buen banco de datos técnicos y económicos
para poder especificar los sistemas. Asimismo, procurará que la informaciónse mantenga al día, para poder aplicar siempre las soluciones más ventajo-sas. No olvidemos que la mayor parte de los componentes son de tecnologíamadura, salvo los arrancado res estáticos, aunque éstos dentro de poco se
podrán considerarlos también.
7.1. CONT ACTORES E INTERRUPTORES
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 167/343
146 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Las condiciones de diseño y elección de interruptores para motores son:
]ntensidad de conexión.Intensidad de desconexión.Duración prevista para el aparato.Duración prevista para los contactos del aparato.
En los motores de media tensión (3; 4,16; 6; 1 1 kV) se emplean ventajosa-mente los siguientes tipos de interruptores:
De arco soplado magnéticamente.De arco en vacío.De arco en hexaOoruro de azufre (SF(JDe arco en cámaras de pequeño volumen de aceite.
Las versiones de arco en vacío y en SF 6 son las más usadas actualmente.Vamos a centramos en el empleo de interruptores de baja tensión; sin
embargo, en el Apéndice A.2.3 se tabulan las características más usuales decontactores de media tensión para motores.
En baja tensión adoptamos exclusivamente contactores. El contactor esun interruptor mecánico accionado por un electroimán que adopta las posiciones de abierto O cerrado en función de la desexcitación o excitación
del electroimán. En el momento en el que el electroimán se desexcita se abre por la acción de resortes antagonistas. Los contactores tienen las propieda-des siguientes:
Apertura de corrientes altas mediante un circuito auxiliar de controlrecorrido por una corriente pequeña.
Puede funcionar en servicio intermitente o continuo.Actúa a distancia simplificando el cableado de fuerza.Robusto y de fácil mantenimiento.El circuito de mando admite tolerancia muy alta de tensión.Abre cuando hay cortes momentáneos de tensión y, por tanto, esseguro frente a arranques intempestivos.Facilita la implantación de enclavamientos y de múltiples pulsadores
para paradas de emergencia.Protege frente a la tensión menor de un umbral determinado al
abrirse por debajo del mismo.Se puede integrar en una red de automatismo.Son modulares permitiendo diversas funciones tales como:
• Protecciones.• Más polos principales .• 'Q. Ah ; nt " " l C' "'¡o ~: •..•_ •...••.."" •..••...•.•..•..•.
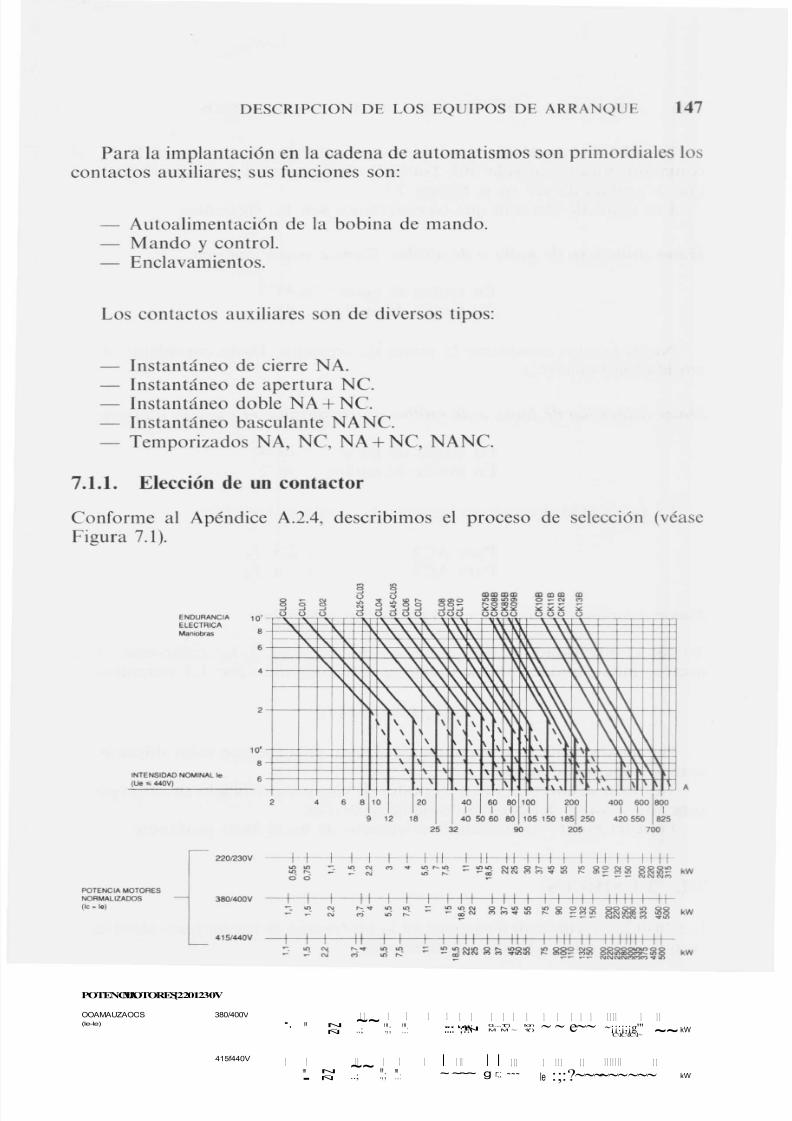
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 168/343
DESCRlPCION DE LOS EQUIPOS DE ARRANQUE 147
Para la implantación en la cadena de automatismos son primordiales los
contactos auxiliares; sus funciones son:
Autoalimentación de la bobina de mando.Mando y control.Enclavamientos.
Los contactos auxiliares son de diversos tipos:
Instantáneo de cierre NA.Instantáneo de apertura NCInstantáneo doble NA + NCInstantáneo basculante NANCTemporizados NA, NC, NA + NC, NANC
7.1.1. Elección de un contactor
Conforme al Apéndice A.2A, describimos el proceso de selección (véaseFigura 7.1).
ENOURANCIA
ELECTAICA
ManIObras
§ § 910' U (.) U
" -'\
10' --
\
\ \\ \
\ \ \ \ \
\
'\ '\
,\ \
\\ \'
~\\\'~\
\'~ \\ \\ \ \\
I NT EN SI DA D N OM IN AL l e
(1Ie '" 440V) - ,
6 8 1 10 L , 1 . 2 0 1 1 X l! ! 1 ~ ! s , L , r s r l 4 : L r l !
25 32 90 205 700
A
POTENCIAMOTORES{2201230V
OOAMAUZAOOS 380/400V(le-le)
415f440V
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1- . ' " N ~~' " ' " '" "'N
0,...,1(') Ion ~ ~ e~~ ~¡¡:¡;¡g'" ~~ kWÑ ..; ., ; . . . : . . . . ';?N M M ~ 1(')
C\lC\lC\l~
1 1 1 1 1 1 1 I 1 1 1 I I 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
'" N ~~ ' " '" ~ ~~~ g r; ; ~ ~ ~ le :;:?~~~~~~~~~ kW- Ñ ..; ., ; . . . :

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 169/343
14 8 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Se debe de considerar el número de maniobras que es capaz de dar el
contactor durante su vida útil. Todos los fabricantes dan gráficas como lasque se acaban de ver en la Figura 7.1.Los casos de elección que consideramos son los siguientes:
Motor asíncrono de jaula o de anillos. Corte a motor lanzado
En motor de jaula AC3En motor de anillos AC2
No es preciso considerar la punta de arranque. Basta considerar la in-tensidad nominal (1.\').
Motor asíncrono de jaula o de anillos. Corte durante el frenado o arranque
En motor de jaula AC4En motor de anillos AC2
La intensidad de corte es importante, y se considerarán:
Para AC2Para AC4
Motor asíncrono arrancado con resistencias estatóricas
Tomar la intensidad de arranque si es, por ejemplo, 5· Ix ; como este valor decrece muy rápidamente, se divide el valor obtenido por 1,3, obteniendo:
Hemos de verificar si el contactor elegido soporta este valor durante untiempo superior al exigido.
También se comprobará si el poder de cierre especificado en catálogo essuperior al valor del corriente calculado arriba.
Para terminar, verificaremos el número de maniobras resultante.
7.2. FUSIBLES
Los fusibles se emplean muy poco en la protección de los motores eléctricos,ya que poseen las siguientes limitaciones:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 170/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 149
Si se adopta un fusible ajustado a la intensidad nominal del motor, al
paso de la corriente de arranque ( 5 . . . : . . . 7 l N ) el tiempo de fusi6n esdemasiado corto.
- Si en la situaci6n anterior se adopta un calibre superior, la protec-ci6n contra sobrecargas moderadas de corta duraci6n resulta impo-sible.
1 ncluso si se logra la elecci6n, el tiempo de fusi6n es una característicaque presenta una dispersi6n elevada respecto de sus valores nominales.
Sin embargo, para protecci6n de los tiristores del circuito de potenciadel arrancador estático se emplean fusibles extrarrápidos en serie con cadatiristor.
Estos fusibles corresponden a la designaci6n aR de las normas. Laelecci6n de estos fusibles es delicada y, en consecuencia, el usuario debe derespetar las indicaciones del fabricante sobre la coordinaci6n entre tiristor yel fusible que le protege, absteniéndose de emplear fusibles que parecieranequivalentes.
Estos fusibles protegen al arrancador de la pérdida de la capacidad de
bloqueo de un tiristor, de los fallos en la conmutaci6n y de los cortocircui-tos externos al a1·rancador, y que pueden ocurrir en las conexiones entre elarrancador y el motor. La elecci6n se realiza en base a los siguientescriterios:
- Características t = f((ell N ) del fusible, que dan el tiempo hasta sudesconexi6n.
- Posibilidad que tiene el arrancador para funcionar con sobrecargasmayores.
- Tensi6n de cortocircuito de los transformadores hasta la alimenta-ci6n del motor.
- Capacidad de cortocircuito de la red.- Tensi6n de arco al producirse la actuaci6n del fusible.
Aunque se emplean mucho los fusibles extrarrápidos para la protecci6nde tiristores, tienen ciertas desventajas:
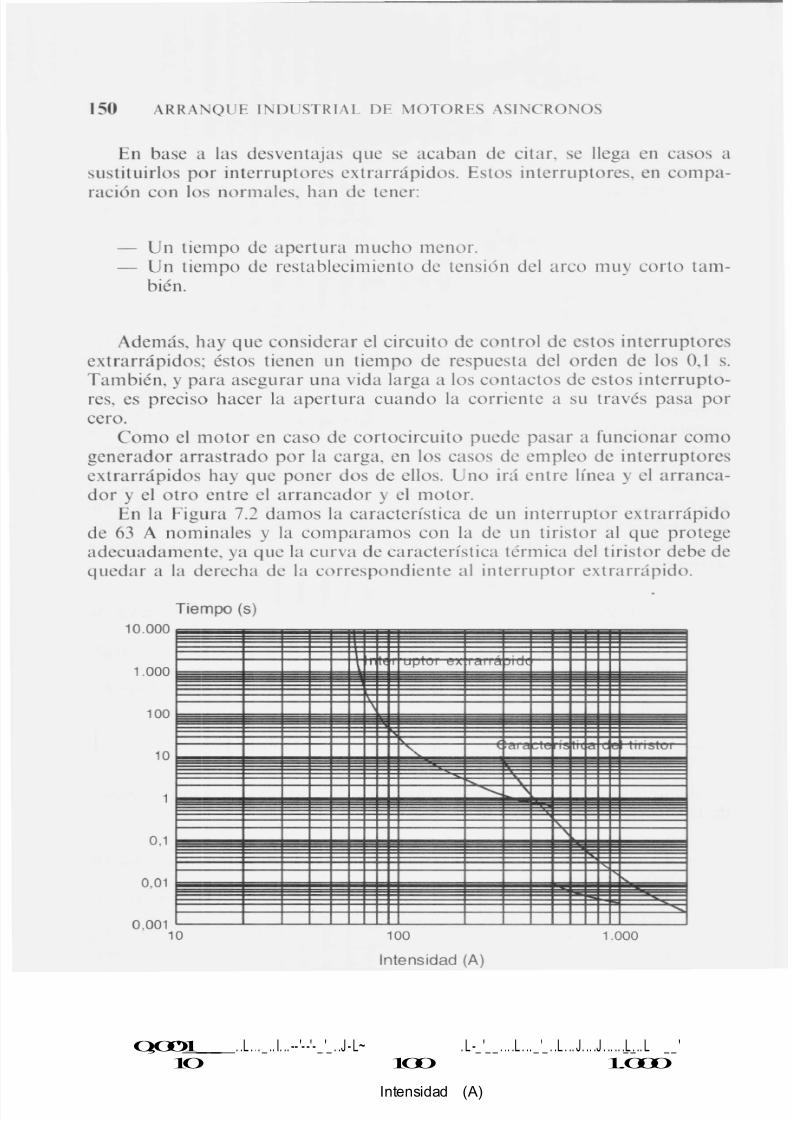
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 171/343
150 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
En base a las desventajas que se acaban de citar, se llega en casos a
sustituirlos por interruptores extrarrápidos. Estos interruptores, en compa-ración con los normales, han de tener:
Un tiempo de apertura mucho menor.Un tiempo de restablecimiento de tensión del arco muy corto tam-
bién.
Además, hay que considerar el circuito de control de estos interruptoresextrarrápidos; éstos tienen un tiempo de respuesta del orden de los 0,1 s.También, y para asegurar una vida larga a los contactos de estos interrupto-res, es preciso hacer la apertura cuando la corriente a su través pasa por cero.
Como el motor en caso de cortocircuito puede pasar a funcionar comogenerador arrastrado por la carga. en los casos de empleo de interruptoresextrarrápidos hay que poner dos de ellos. Uno irü entre línea y el arranca-dar y el otro entre el arrancador y el motor.
En la Figura 7.2 damos la característica de un interruptor extrarrápidode 63 A nominales y la comparamos con la de un tiristor al que protegeadecuadamente, ya que la curva de característica térmica del tiristor debe dequedar a la derecha de la correspondiente al interruptor extrarrápido.
Tiempo (5)
10.000~~~~~~~~m~!~~~~~!~i~
100~_.
10~
0,001'____ . .L . .. _ .. I. .. -- '- -'- _ '_ . .J - L~ . L -_ '_ _ . .. .L . .. _ '_ . .L . .. J. .. .J . .. .. .L . .. L _ _ __ '10 100 1.000
Intensidad (A)
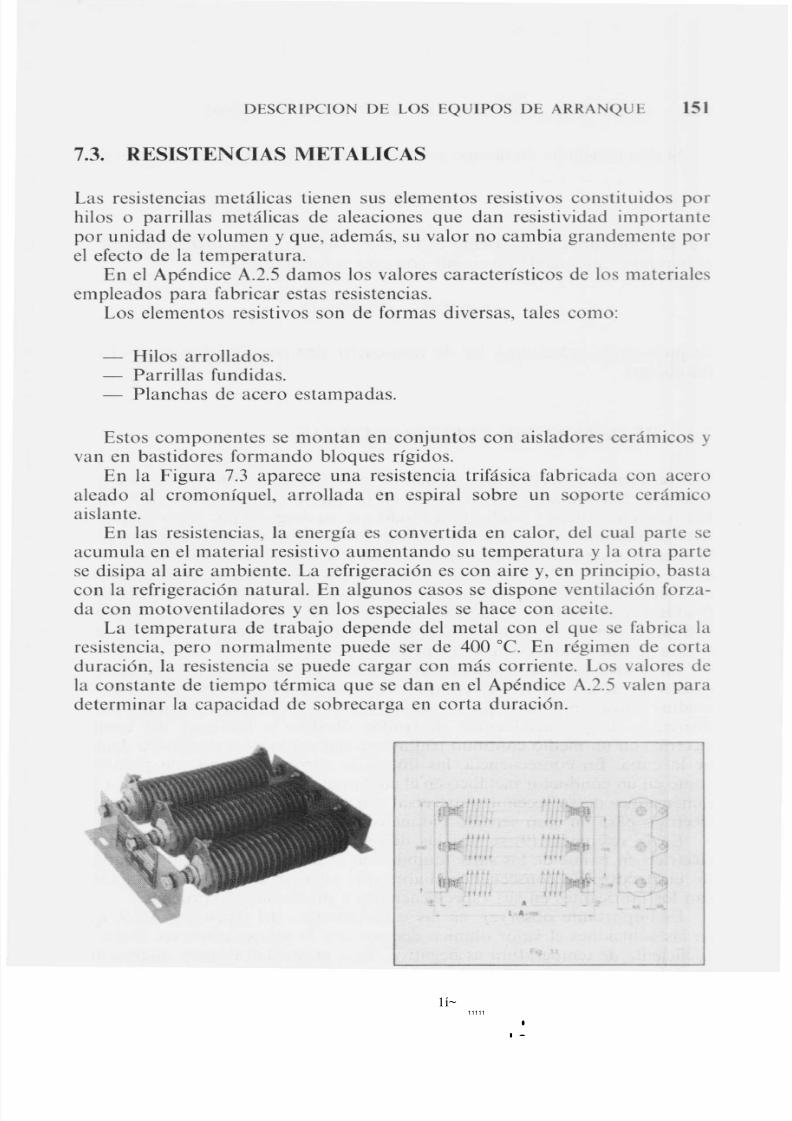
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 172/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 15 1
7.3. RESISTENCIAS METALICAS
Las resistencias metálicas tienen sus elementos resistivos constituidos por hilos o parrillas metálicas de aleaciones que dan resistividad importante por unidad de volumen y que, además, su valor no cambia grandemente por el efecto de la temperatura.
En el Apéndice A.2.5 damos los valores característicos de los materialesempleados para fabricar estas resistencias.
Los elementos resistivos son de formas diversas, tales como:
Hilos arrollados.Parrillas fundidas.Planchas de acero estampadas.
Estos componentes se montan en conjuntos con aisladores cerámicas y
van en bastidores formando bloques rígidos.En la Figura 7.3 aparece una resistencia trifásica fabricada con acero
aleado al cromoníquel, arrollada en espiral sobre un soporte cerámica
aislante.En las resistencias, la energía es convertida en calor, del cual parte seacumula en el material resistivo aumentando su temperatura y la otra partese disipa al aire ambiente. La refrigeración es con aire y, en principio, bastacon la refrigeración natural. En algunos casos se dispone ventilación forza-da con motoventiladores y en los especiales se hace con aceite.
La temperatura de trabajo depende del metal con el que se fabrica laresistencia, pero normalmente puede ser de 400 0 c . En régimen de cortaduración, la resistencia se puede cargar con más corriente. Los valores de
la constante de tiempo térmica que se dan en el Apéndice A.2.5 valen paradeterminar la capacidad de sobrecarga en corta duración.
1í~11111
•I •
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 173/343
152 ARRA QUE I DUSTRIAL DE MOTORES ASINCRONOS
Si esta constante de tiempo es T, y si el tiempo de servicio 1 cumple que:
t < T
y si la sobrecarga en corriente es 1= k· I N ' siendo ¡!I' la corriente nominal,el tiempo t' que puede funcionar con esta sobrecarga es:
después de la sobrecarga ha de transcurrir tiempo suficiente para el en-friamiento.
7.4. RESISTE CIAS ELECTROLITICAS
Las resistencias electrolíticas tienen el medio resistente formado por unasolución determinada y homogénea en la que se sumergen los electrodos.
Estos son metéllicos y se eligen de modo que su desgaste por efecto eleetrolí-tico sea mínimo. Más adelante veremos los diversos sistemas que hay parala variación de la resistencia, que es continua. Las soluciones son diversas;en el Apéndice A.2.9 se dan los valores para distintas concentraciones delas soluciones más empleadas. La m,ls frecuente es la del 10-15% de sosa( aOH). Las pérdidas se dan en el interior del fluido, que es el elementoresistente; por tanto, es fácil integrar en el diseño del reostato el intercam- biador térmico para evacuar las pérdidas R. ¡2.
En contra de lo que sucede para las resistencias metálicas, el cálculo y
diseño de estos reóstatos es complicado y sólo los fabricantes disponen demedios teórico-prácticos para hacerlo. Es debido a que el reparto de ladiferencia de potencial entre electrodos obedece a las leyes del campoeléctrico en un medio continuo tridimensional como es el electrólito dentrode la cuba. En consecuencia, las líneas de corriente ya no son paralelascomo en un conductor metálico en el cual predomina la longitud frente a lasdimensiones de su sección transversal. En la Figura 7.4 vemos este campoeléctrico para un caso sencillo bidimensional.
En la referencia (9) se ven las dificultades para el cálculo del campo
eléctrico en baños de las sales fundidas en el sentido de la profundidad delos electrodos. En consecuencia, habrá que referirse a los valores que indi-can los fabricantes en sus especificaciones y protocolos de pruebas.
Es importante observar, en las características del Apéndice A.2.9. queen las soluciones el valor óhmico decrece con la temperatura; en efecto, elcoeficiente de temperatura es negativo. Esta propiedad es muy interesante,••.....• ~ •• ~ ~1 ~._.t:_"'-_L __ 0 • ,.. -
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 174/343
DESCRIPClON DE LOS EQUIPOS DE ARRANQUE 153
Figura 7.4. Campo eléctrico entre dos electrodos iguales.
se emplea para arranque por resistencias estatóricas (véase Apartado 3.1.2)
o arranque con resistencias rotóricas del motor de anillos (véase Apar-tado 3.2.1).
También hay diseños en los que se fuerza la aparición de la fase vapor en el electrólito, el vapor da un efecto de disminución de resistencia. A éste yal anterior tipo de reóstatos se les denomina termovariables.
Los tres tipos de diseño que aparecen en el mercado son los siguientes:
Reóstatos líquido vapor, para potencias < 750 kW.Reóstatos con electrodos anulares móviles. La profundidad de
los mismos está gobernada por motorreductor. Tienen un campoimportante de variación de resistencia, se emplean para potencias>300 kW.
- Reóstatos con variación de nivel en la cuba mediante una pequeñamotobomba.
Todos los reóstatos electrolíticos se ajustan en fábrica y sus característi-cas se incluyen en el protocolo de ensayos.
El reóstato electrolítico es un equipo caro y complejo, con problemas de
mantenimiento; su empleo está sólo justificado en casos muy especiales.
7.5. TEMPORIZADORES
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 175/343
154 ARRANQUE INDUSTRIAL DE MOTORES AS! CRONOS
sido sustituidos por los de tipo electrónico mucho más baratos, sencillos de
ajustar y fiables al no tener partes móviles.Son muy fáciles de integrar en los automatismos de arranque y, por tanto, su empleo está muy extendido.
Se hace notar que controlar la marcha del arrancador en tiempos prede-terminados no es lo más correcto desde el punto de vista de control, pero eslo más factible desde el punto de vista técnico-económico, dado el pococoste de los temporizadores. Así, en un arrancador estrella-triángulo, comose verá más adelante, la conmutación de la estrella al triángulo se hace bajoel control de un temporizador tras un lapso predeterminado, y esto en
principio es suficiente. Pero si la aceleración durante la fase estrella esmenor debida a algún imprevisto (caída de tensión, atasque de la máquinaaccionada ...), podría suceder que el temporizador conmutara a triángulocuando todavía la velocidad no es suficiente. Aun así, esta circunstancia seda pocas veces.
Los temporizadores corresponden a diversas ejecuciones y sus tiem- pos de actuación se ajustan fácilmente en márgenes que van desde los0,5 segundos hasta las 60 horas, aunque los empleados en arranque demotores están normalmente en la banda de hasta los 60 segundos.
Los temporizadores se clasifican, desde el punto de vista general, cn lassiguientes clases:
De retardo al cierrc.De retardo a la apertura.De intermitencia.Multifunción.Para arrancadores estrella-triángulo.Para controlar el rearranque de motores.
En la Figura 7.5 se ve el esquema funcional de un temporizador paraarrancado res estrella-triángulo; también se indican sus características deconexión en función del tiempo.
En este temporizador, al aplicar la tensión de alimentación, el contactoque alimenta a la bobina del contactor de la estrella cierra durante untiempo regulable entre 0,5 y 60 segundos. Al cabo del tiempo prefijado, abree inicia una pausa breve que suele ser de 100 ms en la mayor parte de loscasos y alimenta a la bobina del contactor del triángulo.
Presentamos también en la Figura 7.6 el ejemplo del temporizador para
controlar el rearranque de motores. Realiza las funciones convencionales demarcha y paren/a. Tiene un sistema de detección de fallo en la tensión dealimentación, que permite restituir la condición de marcha cuando la dura-ción del fallo no supera un tiempo ajustable (normalmente entre 0,2 y2 segundos). En la Figura 7.6 la tensión de alimentación del temporizador se conecta a las bornas A l Y A2. Entre las bornas Y l e Y2 se deben poner Ir'\~"'l"\nt~f"'tAC' rI¡:3 r'\-::.rA nClof'oOC''"l •...:••.....•..• c , )..- __ '1" ~ '-'1 1_- .• I
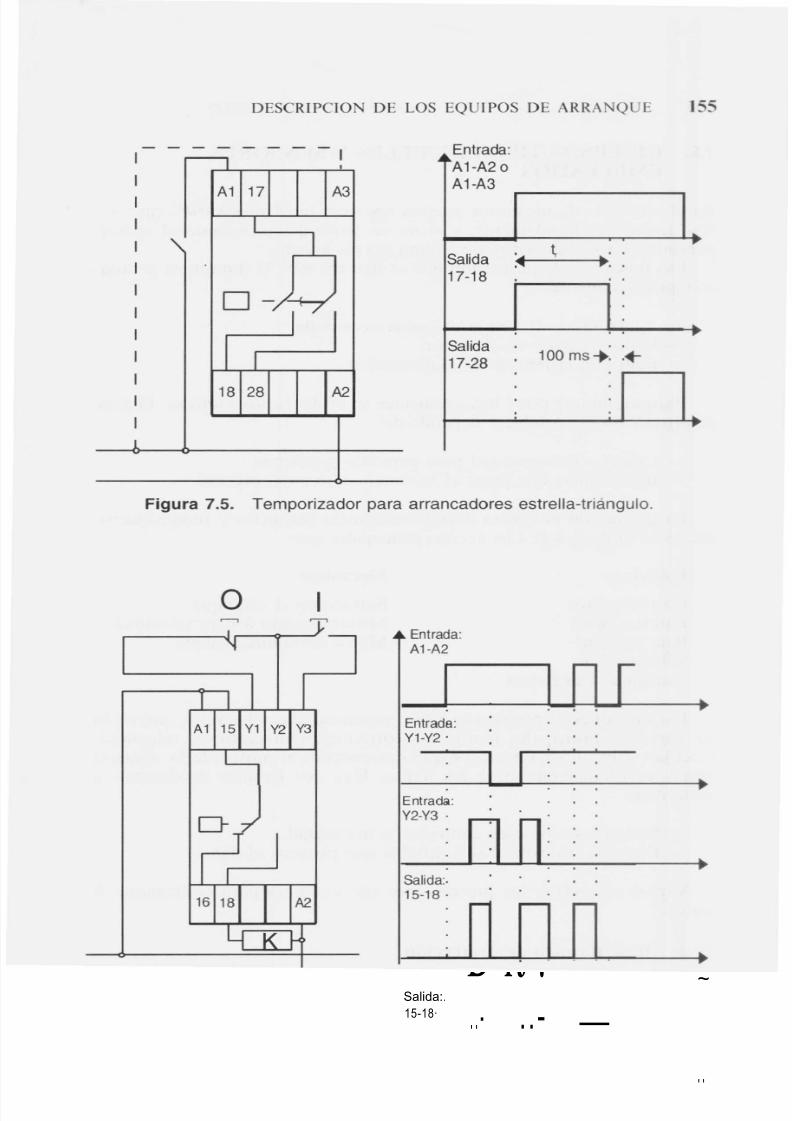
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 176/343
DESCRIPCIO DE LOS EQUIPOS DE ARRANQUE 155
Entrada:
A1-A2 o A1-A3
Salida :.
17-18
Salida17-28
100 ms.... .•..
Figura 7.5. Temporizador para arrancadores estrella-triángulo.
oEntrada:
A1-A2
.J Llli ~Entrada:
Y1-Y2 .
U, ,
~Entrada:
Y2-Y3
D lJ : ~
Salida:.
15-18· . . - . . - -
. .

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 177/343
156 ARRANQUE INDUSTRIAL DI-, MOTORES ASINCRONOS
7.6. DIVERSOS TIPOS DE RELES y SENSORES
EMPLEADOS
En el arranque de un motor pueden aparecer incidentes varios, que si noson detectados rápidamente, y si no se actúa desconectando al motor y parando al accionamiento, ocasionan graves averías.
Las funciones de protección que se han de realizar durante el arranqueson. principalmente:
Agarrotamientos en la máquina accionada.
Fallos internos en el motor.Fallos en la tensión de alimentación.
Para minimizar estos inconvenientes se protegen los motores. El gradode protección es variable y depende de:
Criterios de seguridad para personas y equipos.Importancia que juega el accionamiento en el proceso.
La protección es contra averías mecánicas (cojinetes y rodamientos) oeléctricas (bobinados). Las averías principales son:
Eléctricas
CortocircuitosFallos a masaBaja tensiónSobretensiónTensiones asimétricas
Mecánicas
Retraso en el arranqueMotor girando a baja velocidadMotor permanece calado
Las funciones de protección están encomendadas a los relés, que vigilanlas variables principales (tensiones, corrientes, temperaturas, velocidad ...)y actúan sobre los contactores que desconectan al motor de la alimenta-ción y eventualmente sobre los frenos. Hay dos familias de sistemas de protección:
Indirectos a base de controlar la intensidad.Directos controlando la variable que provoca el daño.
Vamos a describir las protecciones más comunes para el arranque delmotor.
7.6.1. Relé térmico de protección
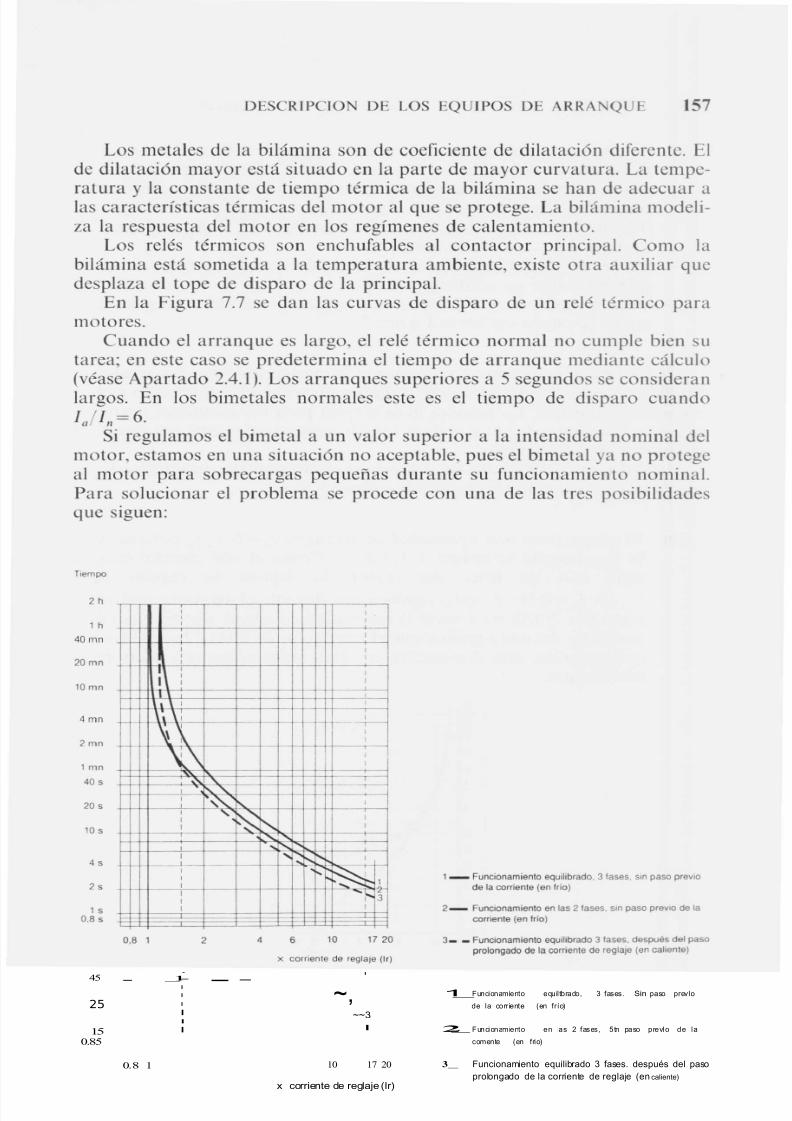
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 178/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 157
Los metales de la bilámina son de coeficiente de dilatación diferente. El
de dilatación mayor está situado en la parte de mayor curvatura. La tempe-ratura y la constante de tiempo térmica de la bilámina se han de adecuar alas características térmicas del motor al que se protege. La bilámina modeli-za la respuesta del motor en los regímenes de calentamiento.
Los relés térmicos son enchufables al contactor principal. Como la bilámina está sometida a la temperatura ambiente, existe otra auxiliar quedesplaza el tope de disparo de la principal.
En la Figura 7.7 se dan las curvas de disparo de un relé térmico paramotores.
Cuando el arranque es largo, el relé térmico normal no cumple bien sutarea; en este caso se predetermina el tiempo de arranque mediante cálculo(véase Apartado 2.4.1). Los arranques superiores a 5 segundos se consideranlargos. En los bimetales normales este es el tiempo de disparo cuandoIjIII=6.
Si regulamos el bimetal a un valor superior a la intensidad nominal delmotor, estamos en una situación no aceptable, pues el bimetal ya no protegeal motor para sobrecargas pequeñas durante su funcionamiento nominal.Para solucionar el problema se procede con una de las tres posibilidades
que siguen:
TIempo
2h
1 h
40 mn
20 mn
lOmn
4 mn
2 mn
1 mn
405
205
105
45
25
150.85
, ,, ,,I I
I I
I I,I
II
I I
.~
,1
_L-I
..~\ \; f-f---
I
'\ I
I
\\ I
~I
,I . , " " , - I
I ,;~
I--f--I t " - .
I
I I
," I
I I
- _1- - -
~,I
I
I
I ~~3I
I I
1_ Funcionamiento equiltbrado, 3 fases. Sin paso prevIo
de la corriente (en frío)
2_ F un cion amie nt o e n la s 2 f ases, 5 tn pa so p re vI o d e la
comente (en frio)
0.8 1 10 17 20
x corriente de reglaje (Ir)
3__ Funcionamiento equilibrado 3 fases. después del paso
prolongado de la corriente de reglaje (en caliente)
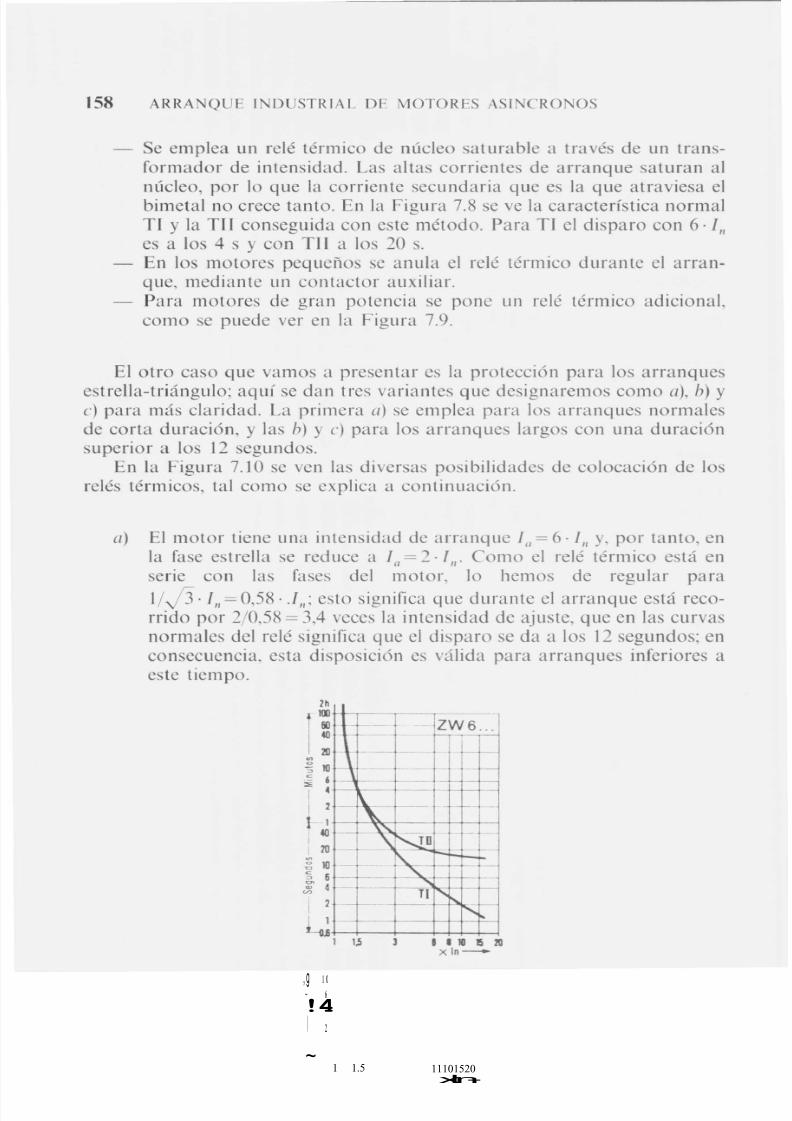
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 179/343
158 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Se emplea un relé térmico de núcleo saturable a través de un trans-
formador de intensidad. Las altas corrientes de arranque saturan alnúcleo, por lo que la corriente secundaria que es la que atraviesa el bimetal no crece tanto. En la Figura 7.8 se ve la característica normalTI y la TII conseguida con este método. Para TI el disparo con 6· /"es a los 4 s y con TII a los 20 s.En los motores pequeños se anula el relé térmico durante el arran-que, mediante un contactar auxiliar.Para motores de gran potencia se pone un relé térmico adicional,como se puede ver en la Figura 7.9.
El otro caso que vamos a presentar es la protección para los arranquesestrella-triángulo; aquí se dan tres variantes que designaremos como a), b) y
e) para más claridad. La primera a) se emplea para los arranques normalesde corta duración, y las b) y e) para los arranques largos con una duraciónsuperior a los 12 segundos.
En la Figura 7.1O se ven las diversas posibilidades de colocación de losrelés térmicos, tal como se explica a continuación.
a) El molar tiene una intensidad de arranque (, = 6· /" y, por tanto, enla fase estrella se reduce a /" =:2 '/". Como el relé térmico está enserie con las fases del motor, lo hemos de regular para
1 / J 3 . / " = 0,58· ./,,; esto significa que durante el arranque está reco-rrido por 2/0,58 = 3,4 veces la intensidad de ajuste, que en las curvasnormales del relé significa que el disparo se da a los 12 segundos; enconsecuencia, esta disposición es válida para arranques inferiores aeste tiempo.
2h
f 1 0 0
6 Il
1 :: 1 0
~ 6
I 4
I 2
t 14 ( 1
2 l I -
, g 1 0
~ 6
!4
I 2
~1 1.5
ZW6 ...
11101520xln-
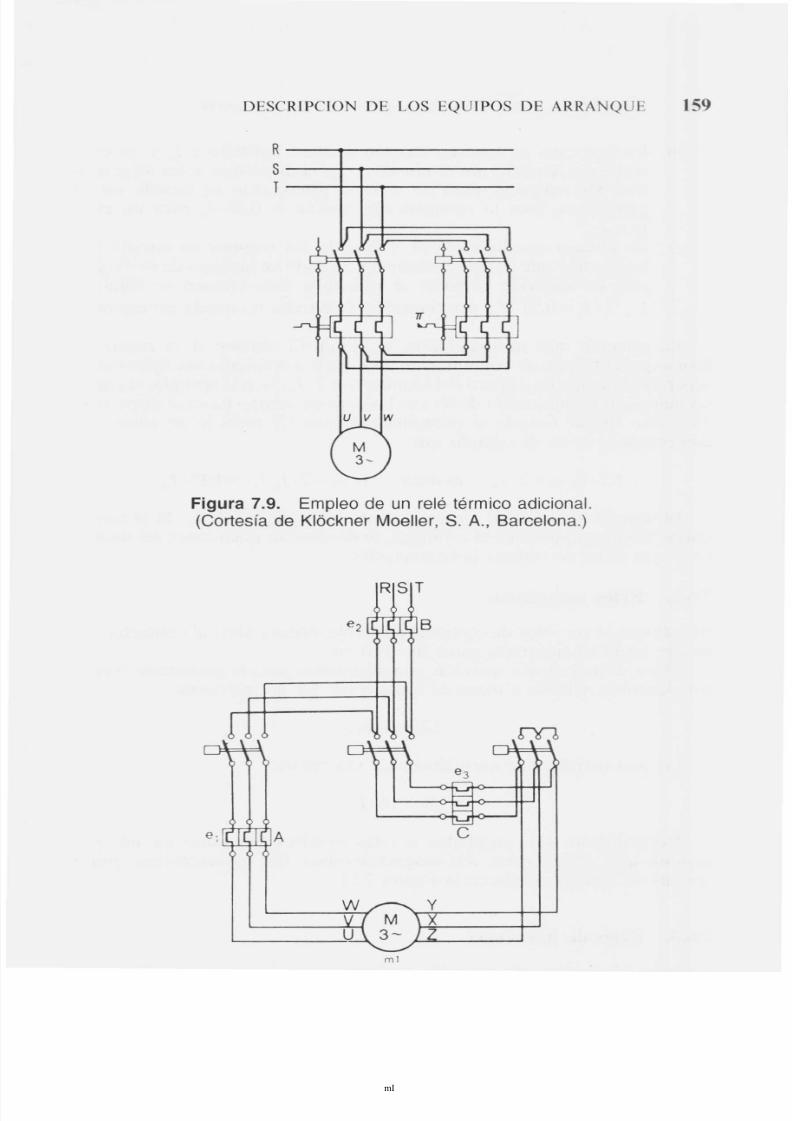
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 180/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 159
R
ST
Figura 7.9. Empleo de un relé térmico adicional.
(Cortesía de Klbckner Moeller, S. A., Barcelona.)
RST
A e
mI
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 181/343
160 ARRANQUE INDUSTRIAL DE MOTORES ¡\SINCRONOS
h) En este caso se pone un térmico en línea ajustado a 1" y, en con-
secuencia, cuando por él circula 2·1", el disparo es a los 40 segun-dos. Sin embargo, para un servicio prolongado en estrella no da proteceión, pues la corriente que circula es 0,58·1" para un ajus-te a Iw
e) En el caso estudiado en hl, y cuando los tiempos en estrella sonlargos, hay que poner un térmico e situado en las fases de modo quesólo es recorrido al pasar al triélngulo. Este térmico se regula a
1 /J3 . 1" = 0,58· .1", pero entonces la estrella no queda protegida.
La solución méls aconsejable es la al + el. El térmico r1 se regula deforma que el tiempo de conmutación de estrella a triélngulo sea ligeramentesuperior al tiempo de disparo del térmico con 2,1". Si, por ejemplo, tenemosun tiempo de conmutación de 60 s se buscarélun tiempo hasta el disparo de55 s; esto sucede cuando la intensidad alcanza 1.7 veces la de ajuste. Enconsecuencia, se ha de cumplir que:
1,7· 1.II , , , , c = 2·1" es decir I a " ,, 'e = 2 . 1 " 1,7 = 1, 18 . 1 "
El térmico e se ha de ajustar para la intensidad 0,58·1". Si el motor queda bloqueado durante el arranque. se desconecta poco antes del tiempoen el que se ha de realizar la conmutación.
7.6.2. Relés magnéticos
Al sobrepasar un valor de corriente ajustable. ordena abrir al contactar delmotor; tarda en ejecutarse entre 50 . . . : . . . 150 ms.
Al ser de tan rápida reacción. son adecuados para la protección contra
cortocireuitos y faltas a masa. El ajuste suele ser normalmente:
2.25 . 1arra"que
Lo cual corresponde normalmente a valores de:
8 ...:...16·1"
ormalmente van acoplados a relés térmicos biláminas en un solo
aparato que se denomina relé magnetotérmico. Sus características, juntocon las del térmico, estéln en la Figura 7.11.
7.6.3. Relés de frecuencia
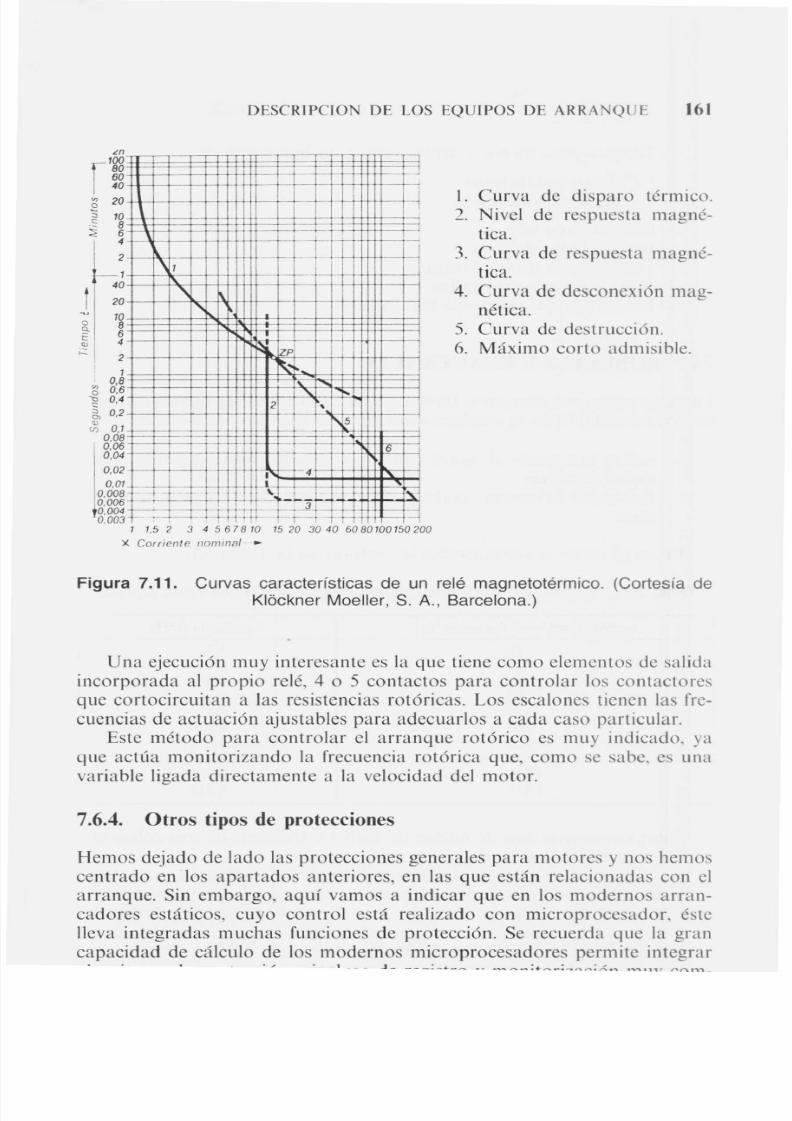
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 182/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 161
.J
iI
1-~--l-
' 1 -- r.
'\. • . .
p
,~" -2 ,
-5
,6
: 4
-1"
- í~- " . . . . . . . ,,--,.--- ~n-\~ ~
¿n
100
806040
e l 20:; 10
~ ~4
2
140
20
10o 8Q 6
~ 4. : : : 2
1'" 0,8 o 0,6
" 0,4g , 0,2
~ 0,10,08 0,06 0,04
0,02
0,01
0,008 0,006 0,0040,003
1 1,5 2 3 4 5 678 10 15 20 30 40 6080100150200
)( Corriente nommal •.
l. Curva de disparo térmico.2. Nivel de respuesta magné-
tica.3. Curva de respuesta magné-
tica.4. Curva de desconexión mag-
nética.5. Curva de destrucción.
6. Máximo corto admisible .
Figura 7.11. Curvas características de un relé magnetotérmico. (Cortesía deKI6ckner Moeller, S. A., Barcelona.)
Una ejecución muy interesante es la que tiene como elementos de salida
incorporada al propio relé, 4 o 5 contactos para controlar los contactoresque cortocircuitan a las resistencias rotóricas. Los escalones tienen las fre-cuencias de actuación ajustables para adecuarlos a cada caso particular.
Este método para controlar el arranque rotórico es muy indicado, yaque actúa monitorizando la frecuencia rotórica que, como se sabe, es unavariable ligada directamente a la velocidad del motor.
7.6.4. Otros tipos de protecciones

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 183/343
162 ARRANQUE INDUSTRIAL DE MOTORES ASI CRONOS
Térmica para motor y arrancador. Con indicación de:
• Calentamiento lento.• Calentamiento nípido.
Falta de una fase.Desequilibrio de fases.Temperatura de los tiristores.Tiristores cortocircuitados.Fallo en el encendido dc los tiristorcs.
7.7. BOBI AS DE REACTA CIA
Las reactancias son elementos limitadores de la corriente en ciertos métodosde arranque; también se emplean para otras situaciones tales como:
Evitar quc pasen al motor con su arrancador sobretensiones o ten-siones parásitas.Evitar las inOucncias mutuas entre equipos conectados a la misma
línea.
En estos casos se recomiendan los valores dc la Tabla 7.1.
Tabla 7.1. Valores de reactancias para evitar influencias de otros equipos
Intensidad nominal del motor (1\) Reactancia (mH)
15 1,730 0.840 0,6
70 0.35150 0,17250 0.10325 0,075530 0.045
1.025 0,0241.435 0,016
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 184/343
DESCRIPCION DE LOS EQUIPOS DE ARRA QUE 163
Si el arranque a estudiar necesita una reactancia determinada X, este
valor Xred será deducido de X.Las bobinas de reactancia responden a dos tipos fundamentales:
Reactancias de núcleo al aire, estrictamente lineales.Reactancias con núcleo de hierro, solamente lineales si trabajan en lazona anterior al codo de saturaci6n.
Las primeras tienen la desventaja de su mayor tamaño, frente a lassegundas, que, al tener un circuito magnético, llevan más flujo magnético
por unidad de volumen. Para el cálculo detallado de reactancias se reco-mienda la referencia (10) y, en particular, sus Capítulos 12, «Cálculo de bobinas y transformadores», y 13, «CAD para bobinas y transformadores».
Aquí insertamos las f6rmulas más sencillas para su determinaci6n.
Bobina de núcleo al aire. Se bobina por espiras continuas, dejando regular-mente espacios que forman los canales de ventilaci6n para la evacuaci6n desus pérdidas. En su montaje en cabinas o cuadros deben de estar suficiente-mente alejadas de chapas de acero para evitar pérdidas suplementarias y
calentamientos en estas chapas por los efectos de la histéresis y de lascorrientes parásitas de Foucault. La f6rmula más sencilla para las de geo-metría cilíndrica es:
X = Il o I N 2. h· Lnep(de/d¡) en Ohmios
En esta f6rmula tenemos:
d i : Diámetro interior (m)d e : Diámetro exterior (m)h : Longitud axial de la bobina (m)J-lo: Permeabilidad del vacío 4· n · 10-7 (H/m)J : Frecuencia de la red N : Número de espiras
Bobinas de núcleo con hierro. Gracias al hierro se logra disminuir su ta-maño, para que sean lineales; es decir, que su valor de la autoinducci6n L,
o su valor de la reactancia inductiva X, no disminuyan con las altas co-rrientes, propias del arranque, se dispone de entrehierros tal como se ve enla Figura 7.12. El valor del entrehierro es crítico y está dado por la f6rmulasiguiente:
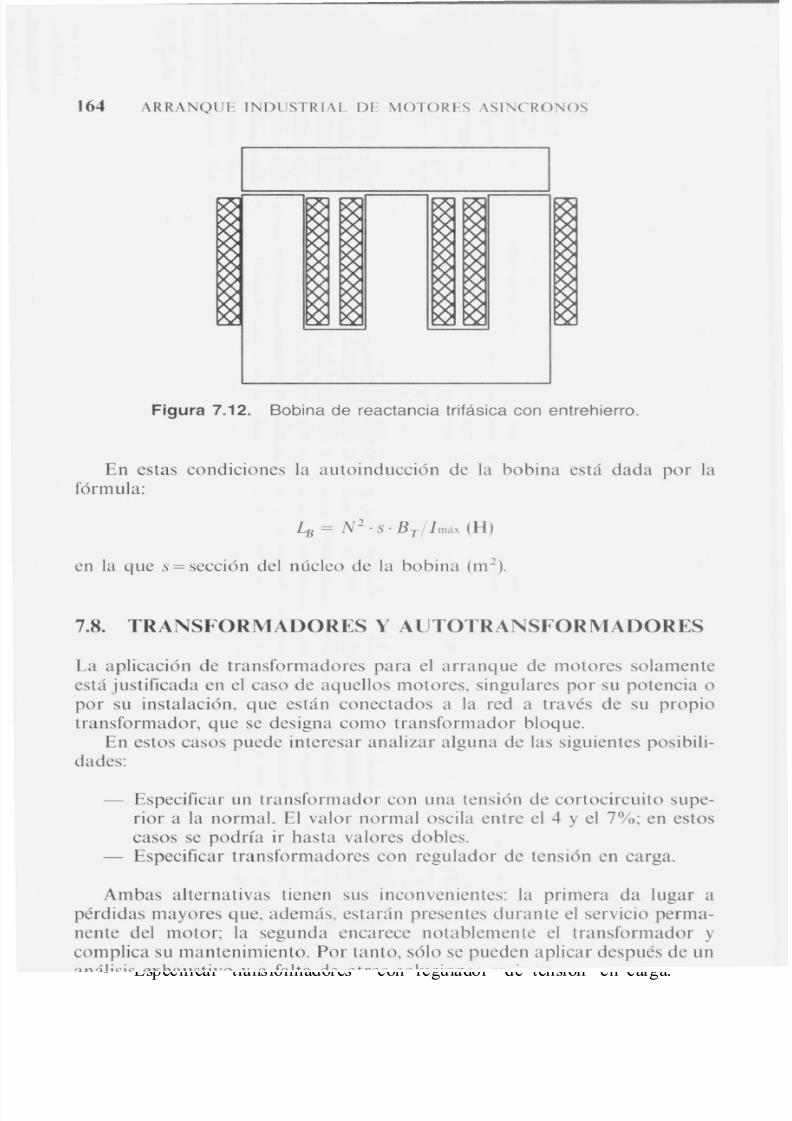
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 185/343
16 4 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
R? <
8
Figura 7.12. Bobina de reactancia trifásica con entrehierro.
En estas condiciones la autoinducción de la bobina está dada por lafórmula:
en la que s = sección del núcleo de la bobina (m2).
7.8. TRANSFORMADORES Y AUTOTRANSFORMADORES
La aplicación de transformadores para el arranque de motores solamente
está justificada en el caso de aquellos motores, singulares por su potencia o por su instalación, que están conectados a la red a través de su propiotransformador, que se designa como transformador bloque.
En estos casos puede interesar analizar alguna de las siguientes posibili-dades:
- Especificar un transformador con una tensión de cortocircuito supe-rior a la normal. El valor normal oscila entre el 4 y el 7%; en estoscasos se podría ir hasta valores dobles.
- Especificar transformadores con regulador de tensión en carga.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 186/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 165
relevante para el arranque, ya que es un régimen ocasional. El autotransfor-
mador consta de un solo bobinado, y ésta es la razón de su economía.Además, se puede dimensionar térmicamente para tiempos de conexión cor-tos. Los parámetros de cálculo para un autotransformador de arranque demotores son los siguientes:
Tensión de línea. Número de tomas de arranque.Relación de transformación para cada toma de arranque prevista.Intensidad de arranque del motor a plena tensión.
Duración del arranque. Número de arranques por hora.Período de reposo entre arranques.Posibilidad de quedar conectado a la tensión después del arranque.
En lo que se refiere al tipo constructivo, y por razones de seguridad enlas instalaciones, se emplean exclusivamente los autotransformadores secos, por evitar el aceite. Dentro de esta familia nos encontraremos con dos tipos:
Transformadores secos encapsulados.Transformadores secos impregnados al vacío y presión.
En la Figura 7.13 se ve un autotransformador seco encapsulado. Es muyconveniente montarlos dentro de cabinas o celdas protegidas por razones deseguridad.
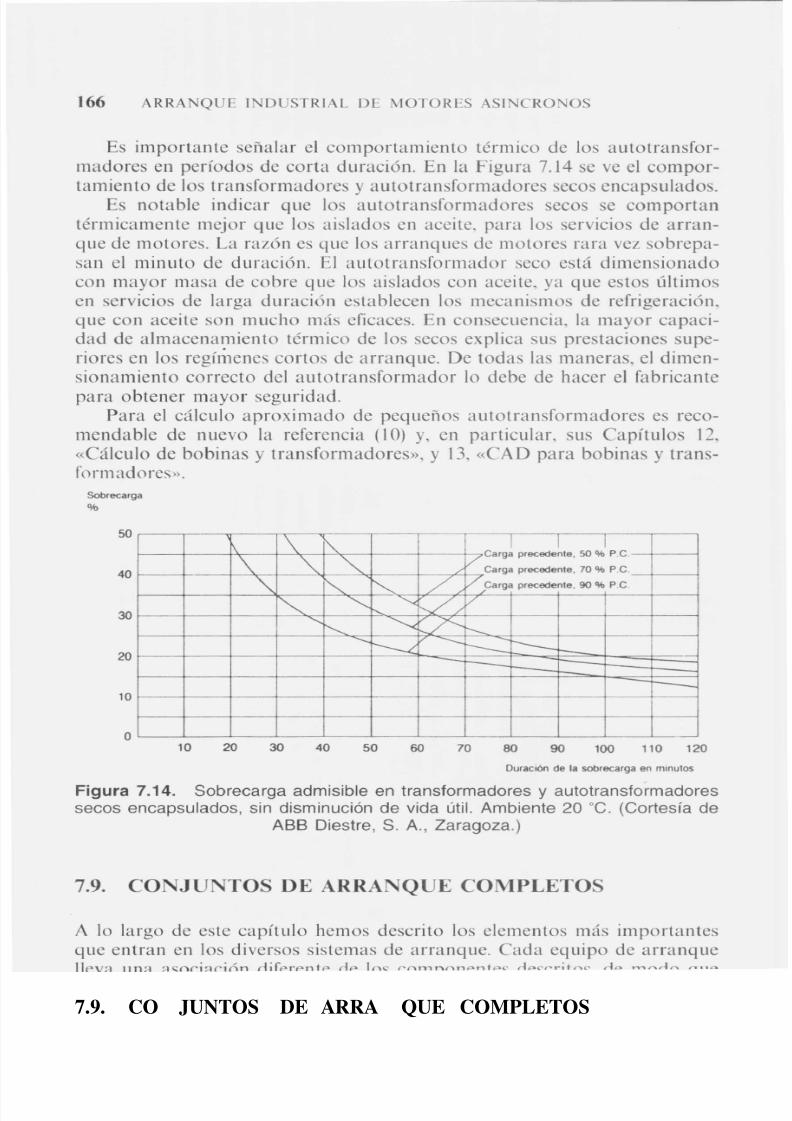
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 187/343
16 6 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Es importante señalar el comportamiento térmico de los autotransfor-
madores en períodos de corta duración. En la Figura 7.14 se ve el compor-tamiento de los transformadores y autotransformadores secos encapsulados.Es notable indicar que los autotransformadores secos se comportan
térmicamente mejor que los aislados en aceite, para los servicios de arran-que de motores. La razón es que los arranques de motores rara vez sobrepa-san el minuto de duración. El autotransformador seco está dimensionadocon mayor masa de cobre que los aislados con aceite, ya que estos últimosen servicios de larga duración establecen los mecanismos de refrigeración,que con aceite son mucho más eficaces. En consecuencia, la mayor capaci-
dad de almacenamiento térmico de los secos explica sus prestaciones supe-riores en los regímenes cortos de arranque. De todas las maneras, el dimen-sionamiento correcto del autotransformador lo debe de hacer el fabricante para obtener mayor seguridad.
Para el cálculo aproximado de pequeños autotransformadores es reco-mendable de nuevo la referencia (10) y, en particular, sus Capítulos 12,«Cálculo de bobinas y transformadores», y 13, «CAD para bobinas y trans-formadores».
Sobrecarga
%
50
40
30
20
10
\ '\. I I I
\ " " '" "'" Carga precedente, 50 % P.C
Carga precedente, 70 % P.C.
" " " " ~ /' ""'/Carga precedente, 90 % P.C
~ "" " "
J."- " ' - . . . . ~ ./'-- . . . . . .
. . . . • •~ - - - - - - - - - - --
-- -r--
o10 20 30 40 50 60 70 80 90 100 110 120
Duraóón de la sobrecarga en minutos
Figura 7.14. Sobrecarga admisible en transformadores y autotransformadoressecos encapsulados, sin disminución de vida útil. Ambiente 20 °C. (Cortesía de
ABB Diestre, S. A., Zaragoza.)
7.9. CO JUNTOS DE ARRA QUE COMPLETOS
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 188/343
DESCRIPCION DE LOS EQUIPOS DE ARRANQUE 16 7
tienen sus especificaciones en cualquier manual o incluso en los catálogos de
los fabricantes.En el otro extremo están ciertos conjuntos que se comercializan comple-tos; cerraremos este capítulo describiendo los más conocidos.
7.9.1. Interruptores guardamotores
Es una asociación que reúne dentro de la mIsma caja los elementos SI-
guientes:
Pulsadores locales de marcha y parada.Contacto adicional para autoalimentación de la bobina.Relé térmico que protege al motor contra las sobrecargas y la pérdi-da de fase.
7.9.2. Conmutadores, inversores
Las aplicaciones principales son:
Conmutar la polaridad del motor. Para el caso de motores de 2 omás velocidades. Cumplen la función de energizar los diferentes bobinados en el caso de bobinados independientes, o para realizar laconexión Dahlander.Conmutar entre las dos partes del bobinado, para los casos dearranque por bobinado parcial.Invertir entre sí dos fases de la línea de alimentación para cambiar elsentido de giro.
7.9.3. Conmutadores estrella-triángulo
Los fabricantes disponen conjuntos con los dos contactores precisos, tem- po rizador, protector térmico, pulsadores y los bloques de contactos auxilia-res necesarios para la realización completa del arranque. Se presentan sobre
perfil normalizado, sobre placa perforada o montados en cofre con los pulsadores al exterior. Están totalmente cableados en las partes de fuerza yde control. M uchos fabricantes los ofrecen en potencias relativamente altas,
que pueden llegar hasta los mayores motores que se fabrican en baja ten-sión (500 a 700 kW).Los conjuntos descritos en este apartado se conectan únicamente a la
línea de alimentación, por una parte, y, por la otra, a las bornas correspon-dientes del motor. En lo que se refiere al control, habrá que realizar elconexionado en serie o en paralelo de los contactos auxiliares, para integrar
I . '------ -. __ 1 ~~_~'-: ....__ ..... . . . . J • • . • . I __ ................•.•.........n-~ •.•••a •.••.••1 Ot"\ al 1"1110131 "'At"r h<.l J1p

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 189/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 190/343
CAPIT LO
OCHOPROBLEMAS TERMICOS y MECANICOS
EN EL ARRANQUE
En los Capítulos 2, 3, 4 Y5 de este libro hemos realizado evaluaciones de lascaracterísticas energéticas y mecánicas del motor que está en proceso de
arranque.Desde la perspectiva térmica se ha calculado la energía disipada en los bobinados de rotor y estátor, y con ella se han estimado los valores delcalentamiento de estos componentes mediante la hipótesis de que el calor permanece en los bobinados. Se trata de un cálculo conservador del calenta-miento, que es suficiente en la mayoría de los casos. Sin embargo, en cuantoel servicio que se demanda al motor contiene un número alto de arranques por unidad de tiempo, son precisos métodos más exactos. Los cálculos ci-tados, denominados adiabáticos, llevarían a sobredimensionamiento no
económico del motor y de sus sistemas de arranque. Es preciso, pues, afinar mucho más las estimaciones. Estas se pueden hacer por cálculo, contrastán-dolo posteriormente con ensayos.
Si nos referimos al aspecto mecánico, se han calculado los pares motor y resistente y, en consecuencia, la aceleración del accionamiento completo.Sin embargo, hemos visto que hay pares parásitos de menor importancia.A pesar de esto, ciertas disposiciones de motor y máquina accionada, sonresonantes a determinadas frecuencias. Así se explica que pares parásitos nomuy elevados han ocasionado problemas mecánicos que han llevado al
accionamiento incluso a roturas. Por ello se debe de analizar el comporta-miento torsional de ciertos accionamientos críticos.Los calentamientos durante el arranque dejan de ser homogéneos y se
producen dilataciones diferenciales con la consiguiente aparición de fi-suras que se convierten en grietas o pérdidas de continuidad de la jaularotórica.
'T.,,,,,hi6n 1roe' r.,lpnt<>mipnt,....c inrirlpn pn 1 " ] hohin;Jcio ;Jisl;Jcio rlel estátor

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 191/343
170 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
renciales, ya que está formado por materiales de diferente coeficiente de
dilatación.Cerraremos el capítulo con algunas indicaciones sobre métodos de en-sayo especiales, necesarios para comprobar los cálculos teóricos.
8.1. CALE TAMIENTOS DE ESTATOR y DE ROTOR
El calentamiento se ha evaluado por el método adiabático en el Aparta-do 2.4.3. En la mayor parte de los casos, da un valor conservador, pero
suficiente para las comprobaciones de un solo arranque. El problema surgecuando el número de arranques es alto o cuando hay que arrancar unmotor cuyo rotar o estátor están calientes debido al servicio o arranquesinmediatamente anteriores. Entonces hay que considerar aspectos talescomo:
La disipación térmica juega un papel más importante a medida quese alarga el arranque e incluso en los períodos de descanso.El motor no es homogéneo y está formado por diversos componen-
tes, en los cuales son muy diferentes:
• La generación de pérdidas energéticas.• La evacuación de las mismas.• La capacidad de almacenamiento térmica.
Esta falta de homogeneidad se refiere en primera aproximación a loscomponentes fundamentales tales como:
• Bobinado de estátor.
• Paquete magnético de estátor.• Jaula o bobinado de rotar.• Paquete magnético de rotar.
Pero en una aproximación de algo más de detalle, necesaria paramotores grandes, se necesita subdividir más los elementos anteriores.Llegamos a tener que separar:
• Parte recta y cabezas de bobinas de estátor.• Barras de la jaula de rotar y anillos de cortocircuito.• Jaula superior e inferior.• Diversas secciones de la barra de una jaula de ranuras profundas.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 192/343
P RO BL EM A S T ER MIC OS y M ECA NICO S EN EL A RRA NQUE 171
8.1.1. Modelo simple de un solo cuerpo
Es válido para el estudio del calentamiento, teniendo en cuenta la disipa-ción, y es suficiente, en bastantes casos, para representar la evolución detemperaturas. Se puede aplicar al motor como conjunto, o a un componentecomo el bobinado de rotor.
En este modelo la temperatura es única para todo el motor. Las pérdi-das se originan distribuidas regularmente por toda su masa y tiene en todosu volumen la misma capacidad de almacenamiento térmico. No hay con-ducción interna, ya que la temperatura es homogénea y la disipación es
uniforme a través de su superficie hacia el exterior.Vamos a adoptar las siguientes notaciones:
A : Superficie de refrigeración (m2)
C , e : Capacidad térmica (JtC)
O : Temperatura homogénea ("C)
P l' 1 : Potencia de pérdidas generadas (W)
P p2: Potencia disipada (W)
rJ. : Coeficiente global de transmisión superficial (W1m 2tC)
00 : Temperatura ambiente ("C)
t : Tiempo transcurrido (s)
Planteamos las siguientes ecuaciones:
Balance energético entre potencias generada, disipada y almacenada:
P 1'1 • d t = P 1'2 . d I + C ,e· dO- Calor emitido:
Pp2 = rJ.·A ·(O - 00)
Si hacemos que (O- 00) = 110, tendremos una ecuación diferencialtemporal que integrada en el tiempo da:
110(t) = 110( 00)· [L - e -' iT]
En esta ecuación hemos definido las dos siguientes constantes:• Constante de tiempo térmica: T= C,elrJ.· A .
• Temperatura de equilibrio térmico: 110(oo)=P p1 /rJ.·A o tambiénllamada temperatura de estabilización.
Cuando se alcanza la temperatura de equilibrio térmico se cumple
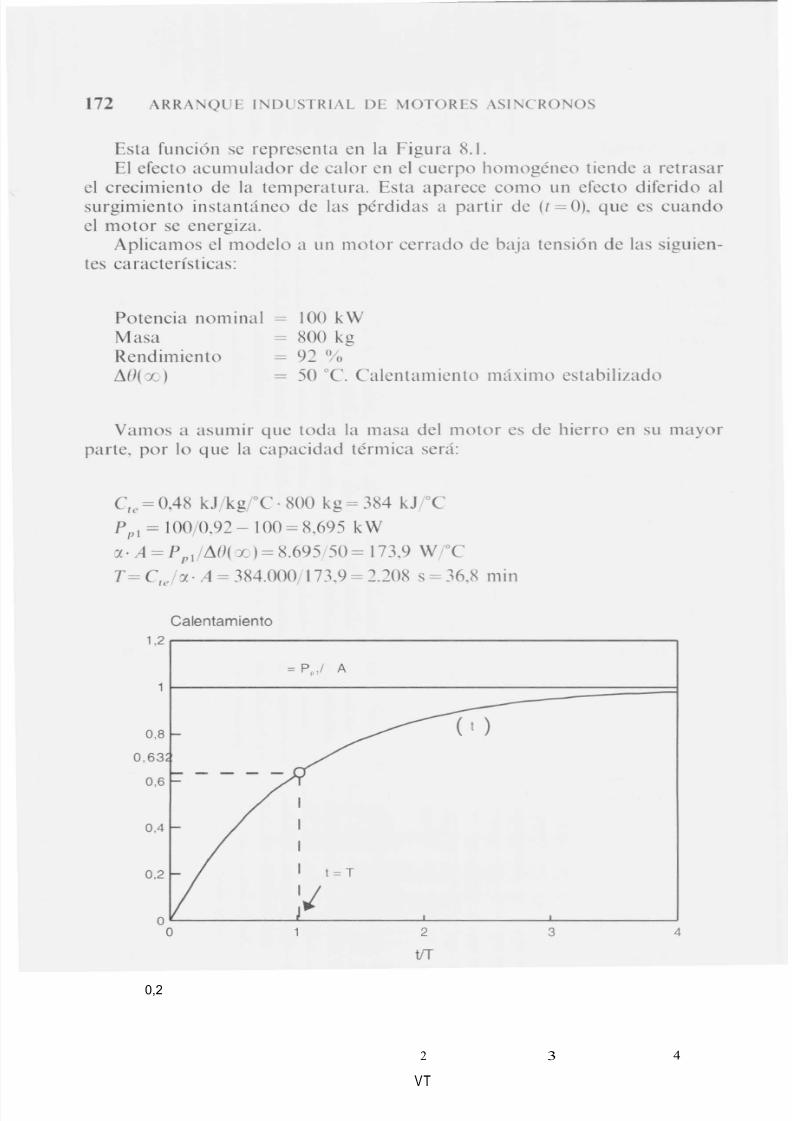
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 193/343
172 ARRA QUE INDUSTRIAL DE MOTORES ASI CRONOS
Esta función se representa en la Figura 8.1.
El efecto acumulador de calor en el cuerpo homogéneo tiende a retrasar el crecimiento de la temperatura. Esta aparece como un efecto diferido alsurgimiento instantáneo de las pérdidas a partir de (1 = O ) . que es cuandoel motor se energiza.
Aplicamos el modelo a un motor cerrado de baja tensión de las siguien-tes características:
Potencia nominal
MasaRendimiento~()(x)
100 kW
800 kg92 %50 T. Calentamiento máximo estabilizado
Vamos a asumir que toda la masa del motor es de hierro en su mayor parte. por lo que la capacidad térmica será:
Cre
= 0,48 k J kg¡OC· 800 kg = 384 k J , o e
?pJ = 100/0,92-100=8,695 kW
Y.·A=PI'1/~()(:x,)=8.695 50= 173.9 W °eT= C re Y.. A = 384.000 173.9 = 2.208 s = 36,8 min
Calentamiento
1,2
= Pp,! A
0,8
0,63
0.6
0,4
0,2
2
VT
3 4
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 194/343
PROBLEMAS TERMICOS y MECA ICOS E EL ARRANQUE 173
Vemos que tenemos todas las constantes para caracterizar la evolución
del calentamiento. Cuando t =T= 2.208 s, la temperatura del motor tendráel valor de:
0(t=T) = 50·(1 - e-1) = 50·0,632 = 31,6 °C
Vemos que cuando el proceso ha avanzado hasta llegar a un instanteigual a la constante térmica T, su temperatura alcanza el 63,2% de la tem-
peratura final.Los valores de (J . dependen mucho de la velocidad del aire de refrigera-
ción. Sus valores típicos están en la banda de:
Las barras de rotar de motores de jaula de ardilla grandes, fabricadascon cobre o sus aleaciones, tienen valores de constante de tiempo térmicadel orden de:
T = 0,5 ..:..10 s
Dentro de este apartado vamos a ver la utilidad del empleo del simula-dor analógico TUTSIM(MR), para el estudio de los regímenes que se modeli-zan mediante un solo cuerpo homogéneo, en los que hay variación de lasconstantes a lo largo del tiempo. Esta situación aparece en el estudio delos regímenes intermitentes variables en los que:
Las pérdidas son variables cíclicamente.La disipación es variable en función de la velocidad del motor.
Lo emplearemos para resolver el caso de un ciclo S5, en el cual aparecela influencia de los arranques y los frenados eléctricos.
Los datos son los siguientes:
Potencia del motor Pérdidas nominalesCapacidad caloríficaCoeficiente total de disipaciónTemperatura ambientePérdidas en el arranq ueDuración del arranquePérdidas en el frenadoDuración del frenadoDuración del ciclo completoT;pmnn "¡prnnpyión
100kW
8 kW360.000 J¡OC
]00 W ¡ O C
40°C32 kW
4 s24 kW
3 s500 s300 s

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 195/343
174 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
El coeficiente de disipación durante el arranque y la parada evolucionalinealmente entre los valores 30 y 100 W
te.En la Figura 8.2 se ve la evolución de las temperaturas para una du-ración total de servicio de 3 horas. Al final de este tiempo la temperatura delmotor es de 64,3 0 e .
8.1.2. Modelo de los n cuerpos
El método simple del cuerpo homogéneo no vale para modelizar el calen-tamiento de un motor eléctrico complejo. Los diversos componentes delmotor tienen diferencias importantes en:
- Pérdidas generadas por unidad de volumen.- Constante de almacenamiento térmico.- Coeficiente de transmisión.
P L O T 1 : P E R D
8 .8 8 8 8 8 8
1 . 8 8 8 8 8 E + 5P L O T 2 : n i A
8 .8 8 8 8 8 8
1 . 8 8 8 8 8 E + 2
8 .8 8 8 8 8 8 T I M E 1 . 8 B 8 8 8 E + 4

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 196/343
P RO BL EM A S T ER MIC OS y MECA ICOS EN EL A RRANQUE 175
Se ve que si modelizamos a la máquina con un número creciente de
componentes simples, la evolución de su calentamiento es mucho más cerca-na a la realidad. Cada uno de los n cuerpos sigue por separado las leyesdel cuerpo homogéneo, pero queda sometido a las influencias de los demásque están físicamente próximos a él.
Si lo que interesa es la representación de la evolución de la temperaturade un solo componente, que está sometido a la influencia de los demás, basta emplear para la representación térmica dos cuerpos, en la mayoría delos casos.
En estos casos lo que se recomienda es hacer un registro experimental de
temperaturas y ajustar los resultados a las ecuaciones matemáticas corres- pondientes a los calentamientos de dos cuerpos o tres cuerpos, por ejem- plo. El método para realizar el ajuste se puede ver en el Apéndice 7.5 de lareferencia (11). La función que representa el calentamiento de un sistemaque se puede representar por dos cuerpos es:
El significado de los valores es:
0(1 ) : Calentamiento en el instante t
01 : Calentamiento final del primer cuerpoT¡ : Constante de tiempo térmica del primer cuerpoO 2 : Calentamiento final del segundo cuerpoT2 : Constante de tiempo térmica del segundo cuerpoO li :Calentamiento inicial del primer cuerpoO 2; : Calentamiento inicial del segundo cuerpo
Indicamos, sin embargo, que no es posible dar el significado físico de lasconstantes anteriores en este caso.
Realmente para la aplicación del modelo de los n cuerpos es precisa lasubdivisión necesaria para que sus resultados valgan para la representaciónde las temperaturas. En la Figura 8.3 se incluye el modelo, de cinco cuerpos, para un motor cerrado de rotor fundido, con ventilación externa por car-casa.
Este modelo sigue la analogía térmico eléctrica de la siguiente forma:
Pérdidas (W) ----+ IntensidadesResistencias térmicas rC/W) ----+ ResistenciasCalentamientos rC) ----+ TensionesCapacidades caloríficas (J¡OC) ----+ Capacidades
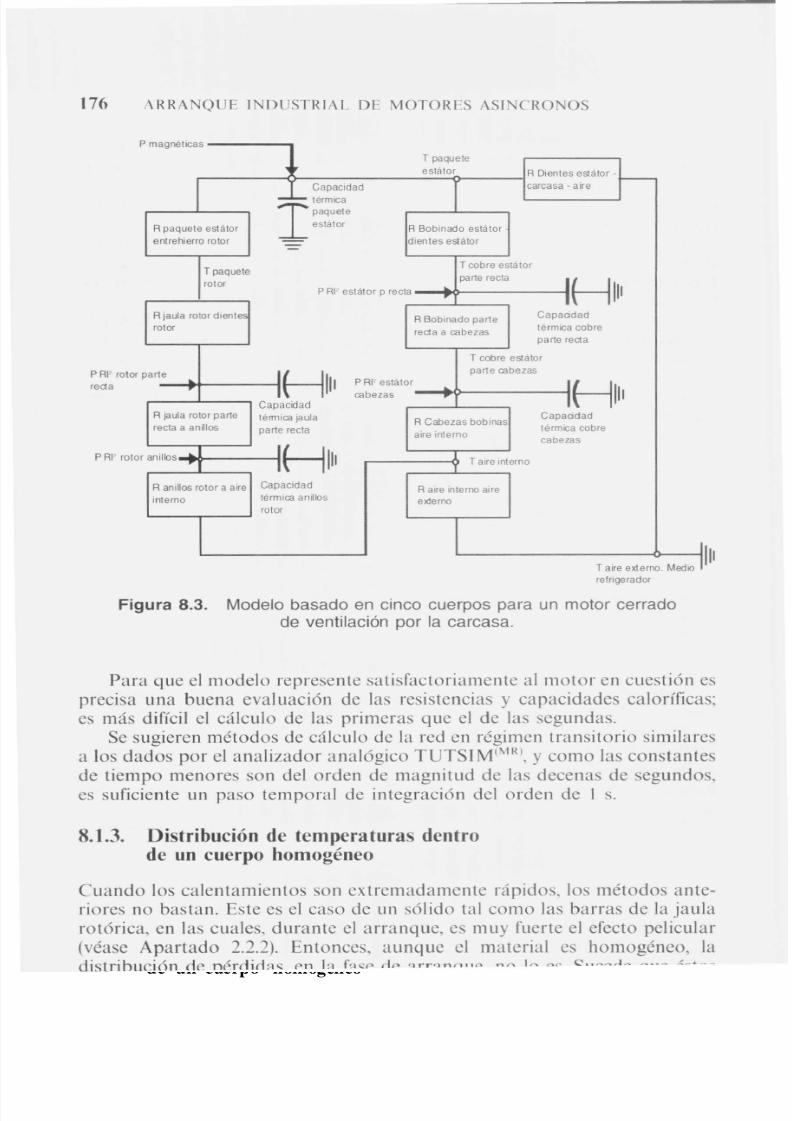
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 197/343
176 ARRANQUE INDUSTRIAL DE MOTORES ¡\SINCRONOS
P magnétICas
HIII
Capaedad
t e rm K : a c o b r e
cabezas
I I 1T a i re e xt ern o . Medio
refngerador
Capaedad
lermlCa c o b r e
parte reda
T c o b r e e s ta l or
parte cabezas
T a I r e mte r n o
T co b re está lar
p a r t e re ct a
P RI eslálor cabezas
P RI! estálor p recta
HIII
Capacidad
termlCa
1paquete
estatar
PRI
P RI- rolor parte
reda
Figura 8.3. Modelo basado en cinco cuerpos para un motor cerradode ventilación por la carcasa_
Para que el modelo represente satisfactoriamente al motor en cuestión es precisa una buena evaluación de las resistencias y capacidades caloríficas;es más difícil el cálculo de las primeras que el de las segundas.
Se sugieren métodos de cálculo de la red en régimen transitorio similaresa los dados por el analizador analógico TUTSI M(MRI. y como las constantesde tiempo menores son del orden de magnitud de las decenas de segundos,es suficiente un paso temporal de integración del orden de I s.
8.1.3. Distribución de temperaturas dentro
de un cuerpo homogéneo

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 198/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 177
conductor. A continuación describimos el método empleado para calcular la
distribución irregular de temperaturas en el interior de la barra de rotor.La distribución de la corriente en lo alto de la sección de la barra de
rotor no es uniforme. Sin embargo, esta densidad variable es calculable enfunción de:
Geometría de la barra de rotor.Resistividad del material de la barra de rotor.Frecuencia de la corriente en el circuito rotórico, que es, a su vez:
• Directamente proporcional al deslizamiento en cada instante.
En resumen, esta densidad es expresable con la función:
(J : Densidad en un punto determinado.(J o: Densidad para una distribución uniforme en la sección de la barra.J~ : Frecuencia de la red.
x : Distancia radial del punto considerado a la parte de barra máscercana al entrehierro.s : Deslizamiento.
A continuación se integra paso a paso la ecuación que rige el arranquedel motor:
J (dn/dt) = C m - Cr
en la que:
J : Inercia total del motor más su máquina accionada.o . : Velocidad angular en un instante dado.C m : Par motor.C r : Par resistente.
Para convertir velocidad a deslizamiento tenemos que:
o . = no (1 - s)
n o : Velocidad síncrona.
Operando así se determinará la función:
s = J(t)
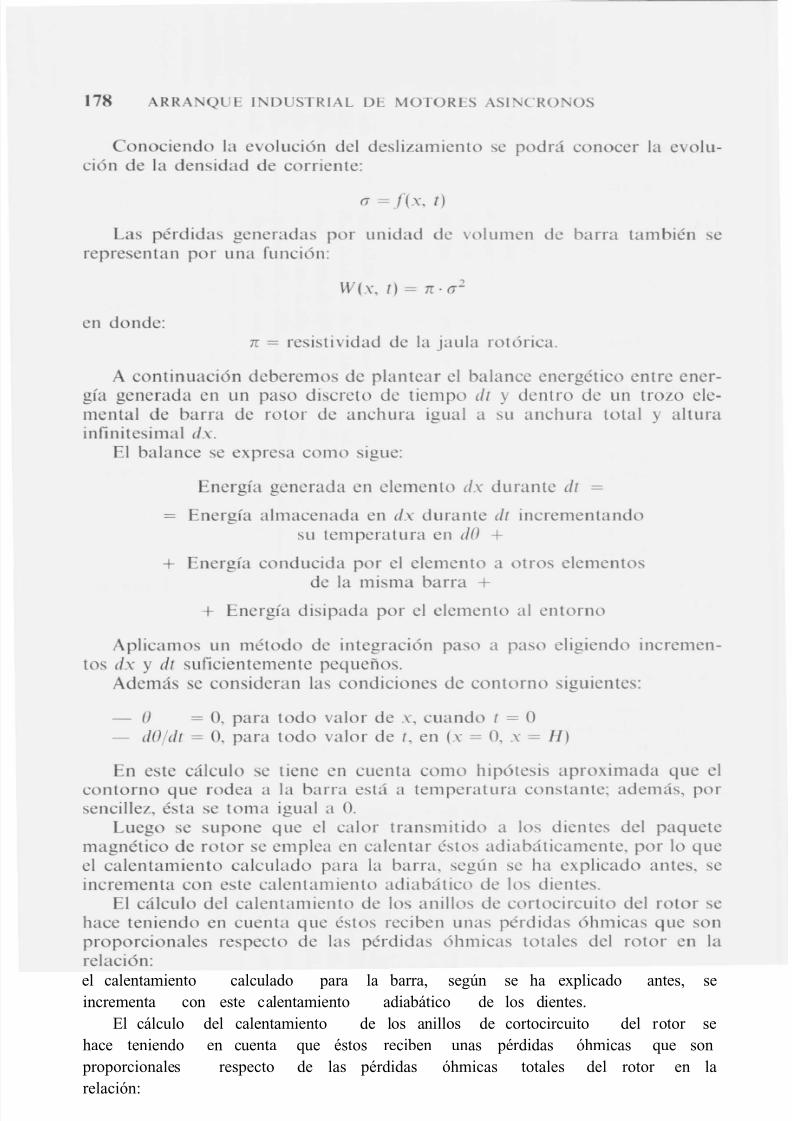
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 199/343
178 ARRA QUE I DUSTRIAL DE MOTORES ASINCRO OS
Conociendo la evolución del deslizamiento se podrá conocer la evolu-
ción de la densidad de corriente:
(J = f(x, t)
Las pérdidas generadas por unidad de volumen de barra también serepresentan por una función:
en donde:
n = resistividad de la jaula rotórica.
A continuación deberemos de plantear el balance energético entre ener-gía generada en un paso discreto de tiempo d i y dentro de un trozo ele-mental de barra de rotor de anchura igual a su anchura total y alturainfinitesimal dx.
El balance se expresa como sigue:
Energía generada en elemento dx durante di
Energía almacenada en dx durante dt incrementandosu temperatura en d O +
+ Energía conducida por el elemento a otros elementosde la misma barra +
+ Energía disipada por el elemento al entorno
Aplicamos un método de integración paso a paso eligiendo Incremen-tos dx y di suficientemente pequeños.
Además se consideran las condiciones de contorno siguientes:
O = O, para todo valor de x, cuando t = O- dO/dI = O, para todo valor de 1, en (x = O, x = H )
En este cálculo se tiene en cuenta como hipótesis aproximada que elcontorno que rodea a la barra está a temperatura constante; además, por sencillez, ésta se toma igual a O.
Luego se supone que el calor transmitido a los dientes del paquetemagnético de rotor se emplea en calentar éstos adiabáticamente, por lo que
el calentamiento calculado para la barra, según se ha explicado antes, seincrementa con este calentamiento adiabático de los dientes.
El cálculo del calentamiento de los anillos de cortocircuito del rotor sehace teniendo en cuenta que éstos reciben unas pérdidas óhmicas que son
proporcionales respecto de las pérdidas óhmicas totales del rotor en larelación:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 200/343
P RO BL EM AS T ER MIC OS y M ECA NICO S EN EL A RRA NQUE 179
Los anillos normalmente tienen diseño menos crítico, por lo que se cal-
culan adiabáticamente.En la Figura 8.4 se dan los resultados del cálculo del calentamiento en elarranque de un motor de 700 kW, 6 kV, 3.000 r.p.m. y 6,5 kg· m2 de inercia.
El arranque se realiza accionando un volante de alta inercia, de cuyofactor de inercia es:
FI = 1 0
Sin embargo, no se considera par resistente durante el arranque, por lo
que la energía total que aparece en la jaula rotórica durante el arranquees de:
Se puede ver que la evolución de las temperaturas es muy distinta paralos diferentes puntos de la barra. Precisamente en esta falta de homogenei-dad está basada la aparición de muchas fisuras que acaban en roturas de lasmismas. Si vemos las curvas anteriores cuando t = 2,5 s, hay unos 40 °e de
Calentamiento de la barra de rotar (QC)
200
Puntos de medida
•••.Fondo +x = 0,75 *x = 0,50 O x = 0,25 X Alto
150
100
50
o 2,5 5
Tiempo (5)
7,5 10

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 201/343
180 ARRA QUE INDUSTRIAL DE MOTORES ASI CRONOS
diferencia entre dos puntos de la barra distantes 0,25 de la altura total
(10 mm en nuestro caso de una barra de 40 mm de profundidad). Estegradiente térmico de:
dTldx = 40 10 = 4 °C mm
es el causante de muchas roturas y fallos mecánicos de la jaula rotórica.
8.1.4. Temperaturas recomendadas para rotor y estátor
Recordamos que en el Apartado 2.4.3 se clasificaron los motores en:
Críticos por el estátor.Críticos por el rotor.
Los motores pequeños son críticos por el estátor y los medianos y gran-des por el rotar. Los motores pequeños tienen jaulas de aluminio fundido ylas de los grandes son soldadas.
Si nos referimos al rotor, vemos que es más interesante analizar los de
los motores medianos y grandes, que son los problemáticos. Desde la ópticadel usuario de motores, es muy difícil realizar cálculos tales como los que sehan expuesto en los Apartados 8.1.2 y 8.1.3, principalmente debido a la nodisponibilidad de datos para modelizar el motor. Por eso sólo se empleael método adiabático que ha sido detallado en el Apartado 2.4.3 y en elEjemplo 2.2.
Los valores de referencia de la temperatura máxima que puede alcanzar la jaula rotórica en régimen adiabático tendrán en cuenta que la jaula estácaliente o no como resultado de otro arranque anterior o de funcionamiento
permanente en régimen nominal estabilizado. A esta temperatura de partidahabrá que sumar la obtenida adiabáticamente.
Los valores máximos en °C más usuales que hemos encontrado en laliteratura técnica, véase referencia (12), son:
Anillos de cortocircuitoBarras em bebidas en paq ueteSaliente de barras en aire
Jaulas decobre o dealeaciones
15 0
275250
Jaulas dealuminiosoldadas
14 0
200180
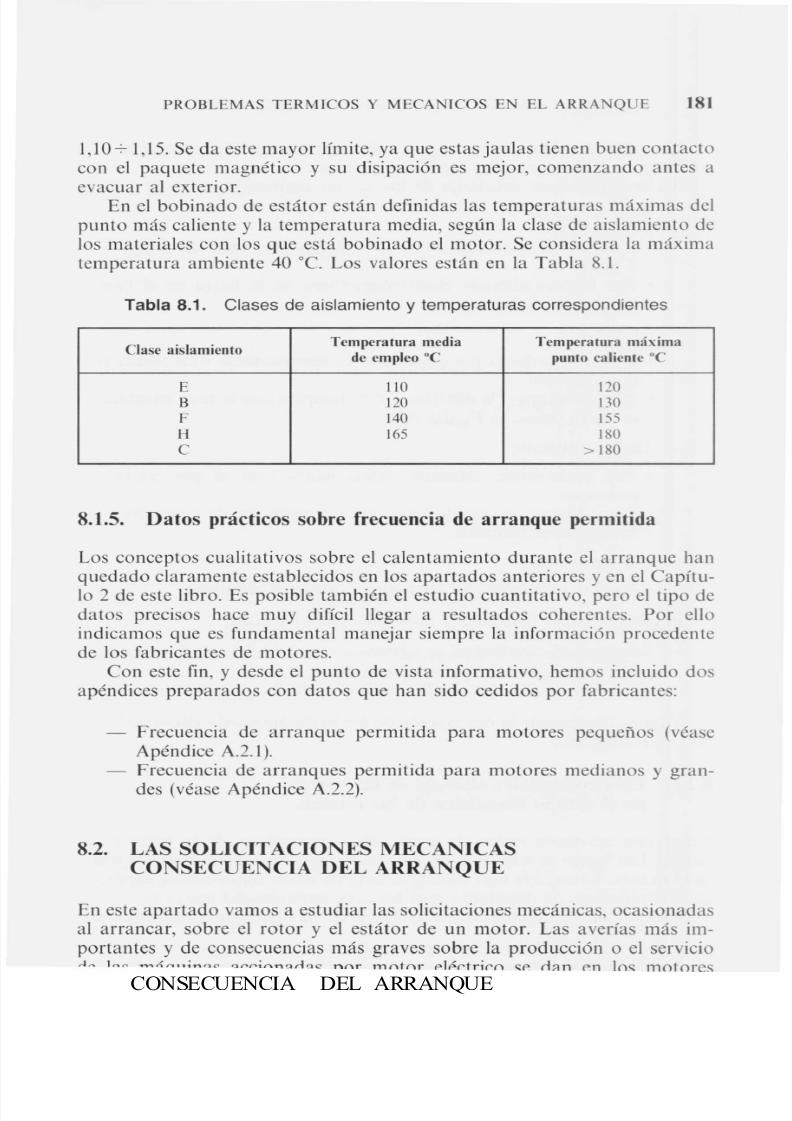
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 202/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 181
1,10-'- 1,15. Se da este mayor límite, ya que estas jaulas tienen buen contacto
con el paquete magnético y su disipación es mejor, comenzando antes aevacuar al exterior.En el bobinado de estátor están definidas las temperaturas máximas del
punto más caliente y la temperatura media, según la clase de aislamiento delos materiales con los que está bobinado el motor. Se considera la máximatemperatura ambiente 40°C. Los valores están en la Tabla 8.1.
Tabla 8.1. Clases de aislamiento y temperaturas correspondientes
Clase aislamiento Temperatura media Temperatura máximade empleo"C punto caliente "C
E 1 1 0 1 2 0B 1 2 0 1 3 0F 1 4 0 1 5 5H 1 6 5 1 8 0C > 1 8 0
8.1.5. Datos prácticos sobre frecuencia de arranque permitida
Los conceptos cualitativos sobre el calentamiento durante el arranque hanquedado claramente establecidos en los apartados anteriores y en el Capítu-lo 2 de este libro. Es posible también el estudio cuantitativo, pero el tipo dedatos precisos hace muy difícil llegar a resultados coherentes. Por elloindicamos que es fundamental manejar siempre la información procedentede los fabricantes de motores.
Con este fin, y desde el punto de vista informativo, hemos incluido dos
apéndices preparados con datos que han sido cedidos por fabricantes:
Frecuencia de arranque permitida para motores pequeños (véaseApéndice A.2.l).Frecuencia de arranques permitida para motores medianos y gran-des (véase Apéndice A.2.2).
8.2. LAS SOLICITACIONES MECANICASCONSECUENCIA DEL ARRANQUE
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 203/343
182 ARRANQUE INDUSTRIAL DE MOTORES ¡\SINCRONOS
En todos los rotores cxisten las solicitaciones siguientes, aunque sólo
son importantes en motores medianos y grandcs.Así la jaula estará solicitada de los modos siguientes:
Radialmente:
• Por fuerzas centrífugas que sólo tienen relevancia en motores de2 polos.
• Por fuerzas alternas electromagnéticas dc la barra en el campomagnético de la ranura.
Axialmente:
• Por fuerzas dadas por diferencias en temperaturas y en coeficientesde dilatación.
• Por curvatura si la distribución dc temperatura es muy irregular cnla barra (véase la Figura 8.4).
Tangencialmente:
• Por aceleración, esfuerzos relacionados con el par medio dearranque.
• Por esfuerzos originados por parcs transitorios de conexión.• Por parcs pulsatorios.
Por construcción:
• Fatigas residuales por soldaduras de jaulas rotóricas.
El estátor estará sometido a las siguientes inOuencias:
Esfuerzos electrodinámicos vibratorios en los bobinados, producidos por la intensidad durantc el arranque.
Esfuerzos axiales que producen exfoliación en aislamientos.Vamos a comenzar la descripción de los fenómenos más importantes de
entre los señalados.
8.2.1. Fuerzas radiales alternas de las barrasen el campo magnético de las ranuras
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 204/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 183
Para realizar el cálculo se expresa la variación de la energía magnética
de la barra debida a su desplazamiento en el campo magnético de la ranura.Los cálculos han logrado determinar una fuerza sobre una barra de 5 mmde ancho de 12,5· 10- 5 N/(m· A 2 ).
La frecuencia de la fuerza es el doble de la frecuencia rotórica. A rotar parado son 100 Hz, pero puede pasar durante el arranque por algún puntode resonancia.
El fenómeno se controla ajustando la barra a la ranura, como lo hacenmuchos fabricantes. La anchura circunferencial de la barra reduce las fuer-zas, pero el diseño electromagnético no da libertad para cambiarla fácil-
mente.Algunos fabricantes han impregnado los rotores de corto con resinas osales no conductoras para reducir el juego barra-ranura, de esta forma se persIgue:
- Minimizar pérdidas suplementarias en régimen permanente.- Reducir el juego barra-ranura.
Sin embargo estas soluciones no se han impuesto.Indicamos que las vibraciones barra-ranura cuando pasan de un umbral
producen chispas que destruyen el metal agrandando el juego y acelerandoel mecanismo de vibración hasta la completa destrucción de la barra.
8.2.2. Esfuerzos axiales de dilatación dados por diferenciasde temperaturas
Este fenómeno se da a la vez en rotores y estátores y sus consecuencias sonsimilares.
En estátores, las dilataciones axiales que producen exfoliación del ais-
lamiento son proporcionales al aumento de temperatura y al coeficiente dedilatación. En rotores ocasionan roturas en barras, anillos y soldaduras barra-anillo.
La más grave es la dilatación diferencial en la transición entre materialesde coeficiente de dilatación diferente. En bobinados de estátor existe latransición de cobre a aislamiento y a hierro del paquete magnético. En losmotores de paquete magnético largo el fenómeno es más serio.
Las solicitaciones axiales tienen también importancia en los motores dedoble jaula, ya que ambas alcanzan temperaturas muy diferentes. A veces
las barras de rotor expansionan axialmente de modo no uniforme; esto dañalas soldaduras entre barras y anillos de cortocircuito.Las roturas de las barras de las jaulas se localizan principalmente en las
uniones de las barras con los anillos de cortocircuito y aparecen en motoresde accionamiento, principalmente en las siguientes circunstancias:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 205/343
18 4 ARRANQ E INDUSTRIAL DF MOTORES ASINCRO OS
La rotura de barras, o la desoldadura, hacen que la jaula cambie sus
características eléctricas y el motor se comporta peor para generar par motor. Las barras abiertas se detectan por el batimiento de amperímetroscon baja frecuencia o por equipos de diagnóstico que analizan armónica-mente este batimiento descubriendo unas frecuencias laterales a la de desli-zamiento. La apertura parcial de barras de la jaula es una avería grave: unavez que se detecta hay que parar el motor y repararlo (véase Apéndice 4).
8.2.3. Esfuerzos axiales causados por distribuciónirregular de temperaturas dentro de la barra
En la Figura 8.4 hemos presentado un caso en el que la diferencia de tem- peraturas entre los cantos superior e inferior de la barra asciende a unos100 0 c . Si la barra tiene una longitud de 700 mm. esto representará diferen-cia de alargamientos. El coeficiente de dilatación lineal del cobre es de17· 10- 6 '0 c . En consecuencia, tendremos que:
Diferencia de alargamiento
17·1O-6
'OC·100 °C·700 mm = L2 mm
8.2.4. Estudio del comportamiento de la jaula rotóricafrente a los pares pulsatorios torsionales
Apareeen a la frecuencia de la red al inieio del arranque. El rotar es unsistema oscilante formado por la inercia del paquete magnético y las de los
dos anillos de cortocircuito. Los anillos extremos están unidos al eentral por resortes que son los salientes de las barras entre anillos y paquetes.Es un sistema con tres grados de libertad. Sus frecuencias naturales son:
II=[K·(2 ·J.1+J R) (J A·J Rll]12(2·n)
.f~ = [KjJil] l 2/(2·n)
Si el par excitador es:
C(t) = Cm:;\' sen (2· n·( t)
La máxima deformación angular entre el anillo de un lado y paqueteresulta:
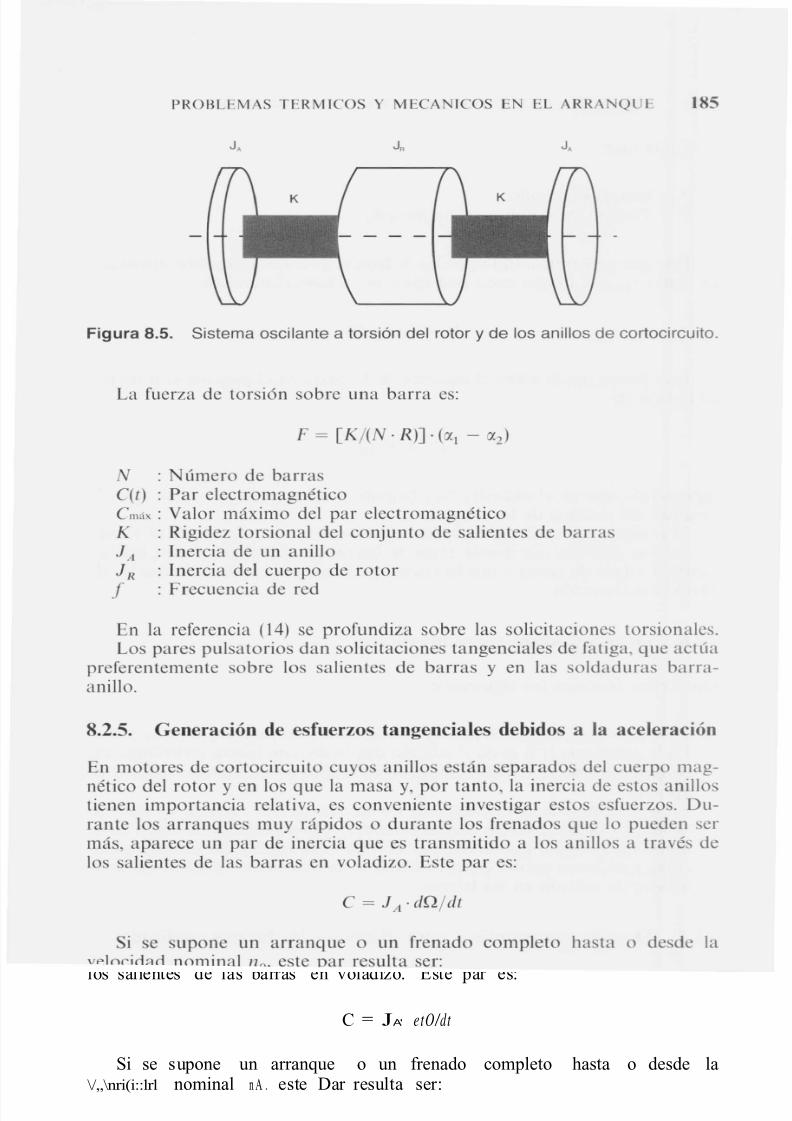
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 206/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 185
Figura 8.5. Sistema oscilante a torsión del rotar y de los anillos de cortocircuito.
La fuerza de torsión sobre una barra es:
F = [K/(N· R)J· ((X , - (X 2)
N : N úmero de barrasC(t) : Par electromagnético
Cmáx : Valor máximo del par electromagnéticoK : Rigidez torsional del conjunto de salientes de barrasJ A : 1nercia de un anilloJ R : Inercia del cuerpo de rotor . r : Frecuencia de red
En la referencia (14) se profundiza sobre las solicitaciones torsionales.Los pares pulsatorios dan solicitaciones tangenciaIes de fatiga, que actúa
preferentemente sobre los salientes de barras y en las soldaduras barra-
anillo.
8.2.5. Generación de esfuerzos tangencia les debidos a la aceleración
En motores de cortocircuito cuyos anillos están separados del cuerpo mag-nético del rotor y en los que la masa y, por tanto, la inercia de estos anillostienen importancia relativa, es conveniente investigar estos esfuerzos. Du-rante los arranques muy rápidos o durante los frenados que 1 0 pueden ser más, aparece un par de inercia que es transmitido a los anillos a través de
los salientes de las barras en voladizo. Este par es:
C = J A' etO/dt
Si se supone un arranque o un frenado completo hasta o desde la\/,,\nri(i::lrl nominal n A . este Dar resulta ser:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 207/343
186 ARRANQUE IND STRIAL DE MOTORES ASINCRONOS
En la que:
J A : Inercia del anilloT : Tiempo de arranque o de frenado
Este par está transmitido por las N barras de rotar, que están situadas aun radio r B , por lo que cada una sufre un esfuerzo lateral de:
F = C/(r B· N )
Esta fuerza actúa sobre el encastre de la barra en el paquete con un par de flexión de:
suponiendo que en el encastre hay empotramiento perfecto, y que l B es la
longitud del saliente de las barras.El módulo resistente de la barra respecto a este par flector es el menor de los dos posibles que puede tener la barra, ya que el par actúa lateral-mente. Fatigas de cierta consideración aparecen sobre todo en frenados demuy corta duración.
8.2.6. Otros esfuerzos sobre los rotores
Entre ellos tenemos los siguientes:
- Esfuerzos centrífugos. Sólo son considerados en motores de dos polos.En la referencia (15) se da el cálculo detallado, con fuerza centrífuga, delconjunto barras-anillo con adopción de anillos de zunchado calados conaprieto.Fatigas residuales por soldadura. La referencia (16) informa de las ten-siones residuales que los métodos incorrectos de soldadura dejan en launión barra-anillo por soldadura. Son debidas tanto a las durezas indu-
cidas, que hacen perder características al material base, como al debilita-miento de sección en las barras.
8.2.7. Detalles constructivos para disminuir las fatigas analizadas

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 208/343
PR OB LE MA S T ER MIC OS y MECANICOS EN EL ARRA QUE 187
T TyM t TyM
M \_,
Barras Vista frontal
T. Grietas térm icas
M. Grietas mecánicas
T M
M
Vista superior del anillo y algunas
barras
Figura 8.6. Rotor de cortocircuito, en construcción soldada. Lugares másposibles de aparición de averías.
También indicamos algunas soluciones, sin pretender ser exhaustivos, pues es un tema ligado a las diferentes tecnologías que emplean los fabrican-tes. No existe por otro lado una norma o práctica común para los ro-tores de cortocircuito. Nos referimos obviamente a motores críticos por elrotor.
En la construcción de rotores con solicitaciones mecánicas y térmicaselevadas se emplean aleaciones de cobre especiales, tales como:
Cobre al cadmio que tiene una conductividad del 85% respecto delIACS y se emplea hasta 250 "C de temperatura.Cobre al cromo cuya conductividad baja un poco más, hasta 82%IACS, pero se puede emplear hasta 350°C de temperatura.Cuproníquel 70/30. La aleación 70/30 Cu/Ni se emplea para altastemperaturas 300°C, pero su conductividad es del 5% IACS, por lo
que se emplea para rotores muy especiales de alto deslizamiento.
Para zunchar el rotor es muy conveniente emplear la fibra de vidriocontinua con aglomeran te epoxy O poliéster. A unas buenas característicasmecánicas une su baja densidad (1,7 kg/m3
) y sus inherentes aislamiento
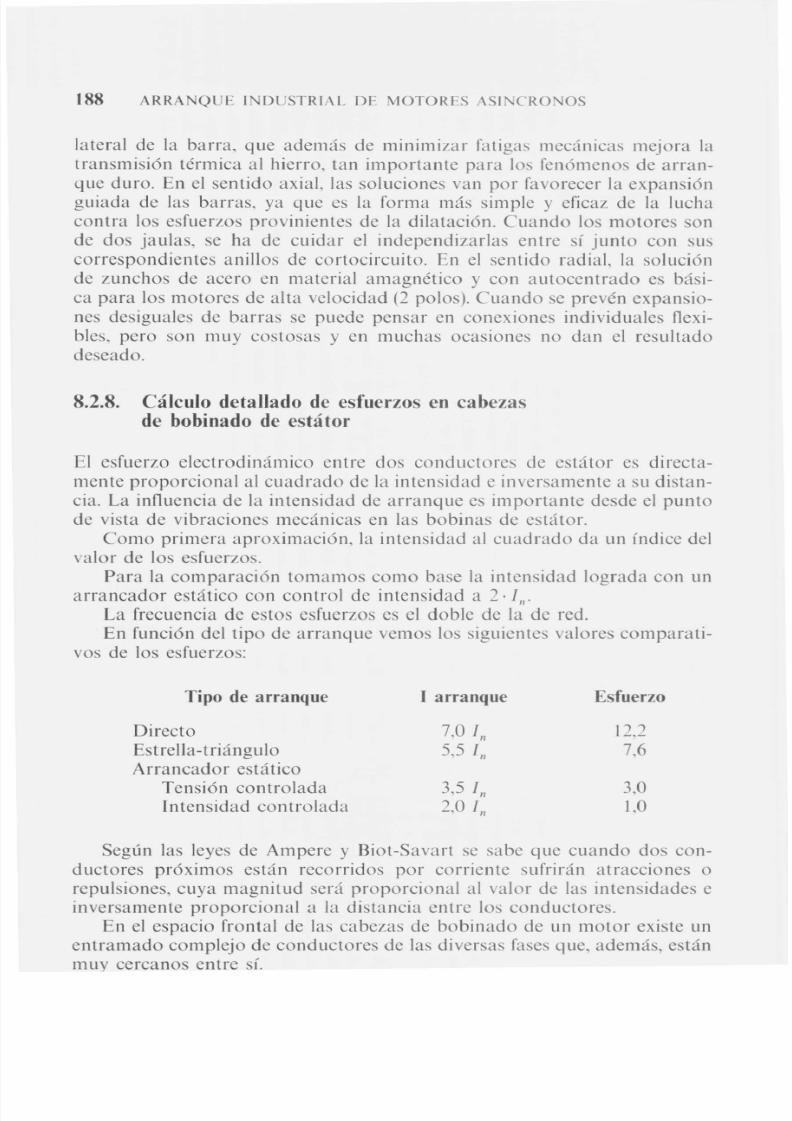
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 209/343
18 8 ARRANQUE ¡ND STRIAL DE MOTORES ASINCRONOS
lateral de la barra, que además de minimizar fatigas mecánicas mejora la
transmisión térmica al hierro, tan importante para los fenómenos de arran-que duro. En el sentido axial, las soluciones van por favorecer la expansiónguiada de las barras, ya que es la forma más simple y eficaz de la luchacontra los esfuerzos provinientes de la dilatación. Cuando los motores sonde dos jaulas, se ha de cuidar el independizarlas entre sí junto con suscorrespondientes anillos de cortocircuito. En el sentido radial, la soluciónde zunchos de acero en material amagnético y con autocentrado es bási-ca para los motores de alta velocidad (2 polos). Cuando se prevén expansio-nes desiguales de barras se puede pensar en conexiones individuales nexi-
bles, pero son muy costosas y en muchas ocasiones no dan el resultadodeseado.
8.2.8. Cálculo detallado de esfuerzos en cabezasde bobinado de estátor
El esfuerzo electrodinámico entre dos conductores de estátor es directa-mente proporcional al cuadrado de la intensidad e inversamente a su distan-cia. La innuencia de la intensidad de arranque es importante desde el punto
de vista de vibraciones mecánicas en las bobinas de estátor.Como primera aproximación, la intensidad al cuadrado da un índice del
valor de los esfuerzos.Para la comparación tomamos como base la intensidad lograda con un
arrancador estático con control de intensidad a 2· /1/'
La frecuencia de estos esfuerzos es el doble de la de red.En función del tipo de arranque vemos los siguientes valores comparati-
vos de los esfuerzos:
Tipo de arranque 1 arranque Esfuerzo
Directo 7,0 / 1 / 12,2Estrella -triángulo 5,5 / 1 / 7,6Arrancador estático
Tensión controlada 3,5 1 1 / 3,0Intensidad controlada 2,0 / 1 / 1,0
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 210/343
P RO BL EM AS T ER MIC OS y M ECA NICO S EN EL A RR ANQ UE 189
las bobinas pudiendo llegar al agrietamiento de los aislamientos que las
protegen.Para evitar estos problemas, todos los constructores de motores introdu-cen diversos tipos de refuerzos constructivos en esta zona.
La explicaci6n completa de este fen6meno mecánico y el método detalla-do de cálculo se encuentran en la referencia (17).
En el cálculo se hacen las siguientes simplificaciones, las cuales, desde el punto de vista de la construcci6n de la máquina, dan los criterios normalesde seguridad mecánica:
Hilos de corriente infinitamente delgados en vez de conductores desecci6n finita. Esta simplificaci6n da un error pequeño para los casosusuales de distancias entre conductores.Sustitución de la forma ligeramente c6nica de las cabezas de bobina-do por la forma cilíndrica desarrollada en plano.Concentraci6n de las corrientes rot6ricas en los anillos de cortocir-cuito.
Se calculan las inducciones magnéticas que genera un hilo de corriente 1
de longitud finita en el lugar de coordenada x mediante la ley de Biot-Savart.El cálculo produce los siguientes resultados:
Fuerzas horizontales entre cabezas. Número de puntos de apoyo o anillos recomendados.Acción de la capa superior de bobinas sobre el anillo.Acción de la capa inferior de bobinas sobre el anillo.Fuerza vertical sobre el anillo de amarre por paso polar.
Las potencias unitarias crecientes de grandes motores y su dimensiona-miento eléctrico cada día más apretado, están llevando a unos esfuerzosespecíficos más elevados en su espacio frontal del bobinado de estátor.
En los motores asíncronos la solicitación más elevada, incluso que elarranque, resulta en el proceso de conmutaci6n entre 2 sistemas de tensiónseparados o en el de reconexi6n brusca cuando se realiza en oposici6n defase con una tensi6n residual del 0,4 VII' En este caso la corriente deconexión normal del motor se incrementa con el campo residual.
8.2.9. Soluciones constructivas para el estátor
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 211/343
190 ARRANQUE INDUSTRIAL DE MOTORES AS! CRONOS
que determina las solicitaciones sobre los salientes de bobinas que en la
parte de cabezas son de dirección tangencia!'Las soluciones para el estátor son la fijación de las cabezas por medio deentrelazados de fibra de vidrio endurecida al impregnarse en el métodoglobal VPI (Impregnación Vacío Presión). Se ponen entre cabezas tacos defieltro que hacen de contretes al ser saturados por la resina y luego endure-cidos al curar por el calor. De este modo las cabezas se ayudan entre sí yforman un cesto de extremada rigidez.
En el pasado se unían las cabezas independientemente a uno o a variosanillos que tenían que resistir la suma de todos los esfuerzos. El acuñado
radial en las ranuras da mayor rigidez a todo el conjunto; para que adquierala máxima fijación se insertan lateral y radialmente fieltros que luego sesaturarán de resina y endurecerán al curar.
Estos sistemas han aumentado la fiabilidad de un modo muy importan-te, disminuyendo drásticamente el número de averías en los estátores.
También ha disminuido la facilidad de reparación, pero se ha visto queésta ya no es tan necesaria dada la mejora en la calidad, que ha alejado lasaverías.
8.3. ESTUDIO TORSIONAL DE LA LI EA DE EJESENTRE MOTOR Y MAQUINA ACCIONADA
En el campo de los accionamientos por motores de grandes potencias, y enlos que la conexión mecánica entre motor y máquina es larga y compleja, puede haber problemas potenciales. Las líneas de ejes de estas característi-cas tienen constantes elásticas tales que, en ocasiones, son resonantes conalgunos pares parásitos procedentes del motor. Estos pares aparecen más
frecuentemente en los casos en los que el motor está alimentado por conver-tidores de frecuencia o arrancadores estáticos. En las referencias (18) y (19)se amplían detalles sobre este tema.
Los acoplamientos pueden ser de las categoría siguientes:
Rígidos.Elásticos:
• Lineales. El par transmitido es función lineal del ángulo de defor-
mación existente entre los extremos de entrada y salida del acopla-miento:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 212/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 191
Viscoelásticos, en los cuales hay un fenómeno de amortiguamiento
función de la diferencia de velocidades relativas entre ambos extre-mos. Su par se da por:
C = K I ·( < P I - < P 2 ) + cI .( 0 1 - O 2 ) = KI .< 5< p + cI · (< 50 )
Las inercias de las distintas partes del acoplamiento se deben de tener encuenta en la modelización que se realice.
Si tenemos un acoplamiento viscoelástico entre motor y máquina accio-nada, se aplica el siguiente sistema de ecuaciones diferenciales para suestudio:
JM·dOM/dt = CM - KI ·(<PM - < p1 ll , ¡q ) - el ·(OM - O l l láq)
J l l l áq . dO I l l 'í q / dt = K I . (< p M - < p l l láq ) + C I . (OM - O l ll á q ) - Cres
Si tenemos un sistema de transmisión mecánica de más complejidad, lamodelización se hace subdividiéndolo en escalones. Cuando intervienen ejeslargos de acero, la constante elástica está dada por la fórmula:
en las que:
de : Diámetro externo del eje (m)d i : Diámetro interno del eje (m)teje: Longitud del eje (m)
En ocasiones en las que la máquina accionada está formada por variosescalones o etapas, hay que subdividir su rotor para analizar bien estas posi bles resonancias torsionales.
También en la referencia (20), y en el Apartado 2.6.3.4, se estudia el pro- blema del arranque de volantes con elevada inercia arrastrados a través deacoplamientos de elasticidad determinada, en los cuales el acoplamiento a lamáquina se hace con un embrague deslizante. Es uno de los casos en los que pueden aparecer regímenes torsionales oscilantes.
8.4. LA INFLUENCIA DEL ARRANQUE EN LA VIDADEL MOTOR
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 213/343
192 ARRANQ E INDUSTRIAL DE MOTORES ASINCRONOS
Las condiciones de vida del bobinado del motor eléctrico est<ln dadas
para servicios ideales en los aislamientos. Sin embargo, un bobinado estélsometido a solicitaciones de naturaleLa varia que contribuyen a la reducciónde los valores ideales. Entre éstas, los arranques son los más decisivos.Extraemos los siguientes datos de la estadística de fallos de motores media-nos y grandes, de 6 k V de tensión, que accionan servicios auxiliares encentrales térmicas.
Los fallos han sobrevenido en las siguientes fases del servicio:
Servicio normal con motor arrancado
Arranque del motor Al hacer el ensayo de sobretensiónCa usas varias
8.4.1. Vida de motores críticos por el rotor
62%
24°'03%1 1 ( Y c ,
La fatiga es acumulativa y, en los casos de arranques suceSIVOS, hay quedisminuir los límites de fatiga mecünica y térmica.
En la Figura 8.6 se han visto los lugares de aparición de las roturas detipo mecünico y térmico en rotores de grandes motores.
La vida media de los motores de potencia media y alta y de mediatensión. que tienen jaulas soldadas de cobre o aluminio o de sus aleaciones,es usualmente de 100.000 horas o veinte años.
Consideraremos arranque duro de motores críticos por el rotar cuandose alcanza en un arranque, calculado adiabáticamente, valores del 80-85%de los indicados para los rotores en el Apartado 8.1.4. En el cülculo adiabü-tico influyen:
Caraeterísticas del motor.Inercia total expresada por el factor de inercia (FIl.Masa de la jaula.Material de la jaula y su calor específico.Par resistente:
• Sin par resistente .• Con par resistente cuadrático.
• Con par resistente constante.
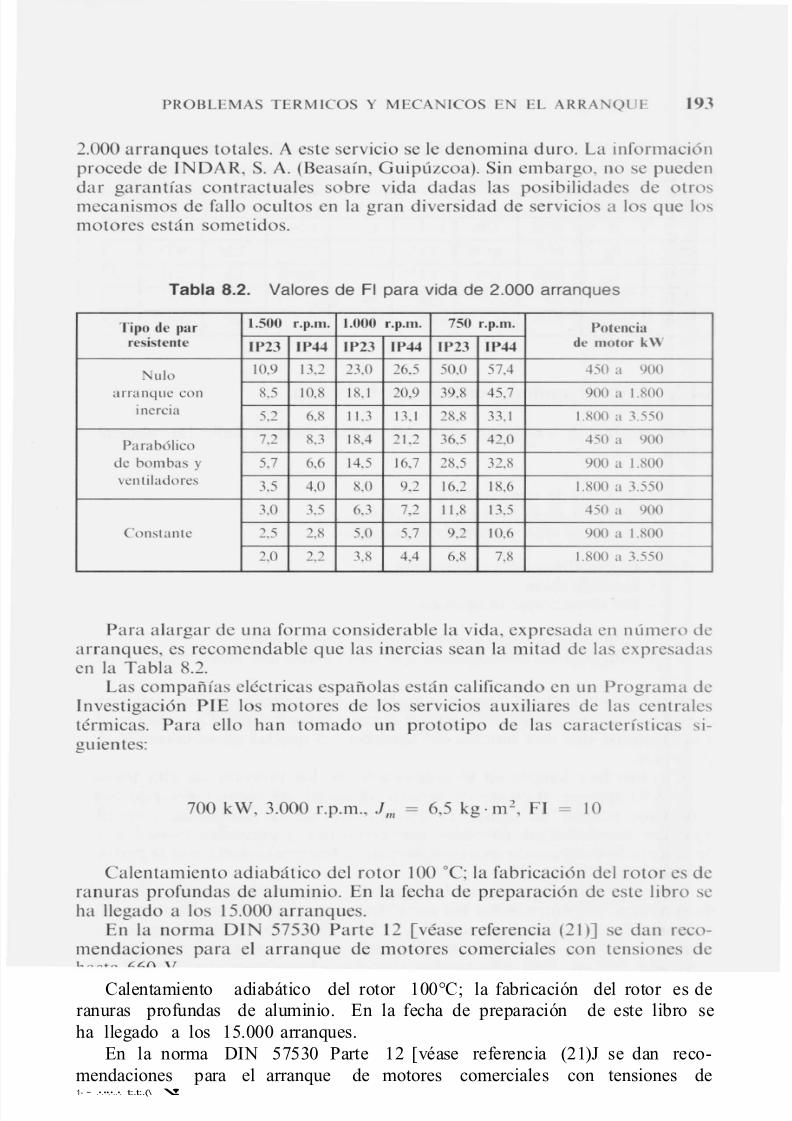
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 214/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 193
2.000 arranques totales. A este servicio se le denomina duro. La información
procede de INDAR, S. A. (Beasaín, GuipÚzcoa). Sin embargo, no se puedendar garantías contractuales sobre vida dadas las posibilidades de otrosmecanismos de fallo ocultos en la gran diversidad de servicios a los que losmotores están sometidos.
Tabla 8.2. Valores de FI para vida de 2.000 arranques
Tipo de par 1.500 r.p.m. 1.000 r.p.m. 750 r.p.m. Potencia
resistente IP23 IP44 IP23 IP44 IP23 IP44 de motor kW
Nulo 10.9 13,2 23.0 26,5 50.0 57,4 450 a 900
arranquc con 8,5 10,8 18,1 20,9 39,8 45,7 900 a 1.800ltlerCla 5,2 6,8 11,3 13,1 28,8 33.\ 1.800 a 3.550
Parabólico 7,2 8,3 18,4 21,2 36,5 42,0 450 a 900
de bombas y 5,7 6,6 14.5 16,7 28,5 32,8 900 a 1.800vcntiladorcs 3,5 4,0 8,0 9,2 16,2 18,6 1.800 a 3.550
3,0 3,5 6,3 7,2 11,8 \3,5 450 a 900Constante 2,5 2,8 5,0 5,7 9,2 10,6 900 a 1.800
2,0 2,2 3,8 4,4 6,8 7,8 1.800 a 3.550
Para alargar de una forma considerable la vida, expresada en número dearranques, es recomendable que las inercias sean la mitad de las expresadasen la Tabla 8.2.
Las compañías eléctricas españolas están calificando en un Programa deInvestigación PIE los motores de los servicios auxiliares de las centralestérmicas. Para ello han tomado un prototipo de las características si-guientes:
700 kW, 3.000 r.p.m., Jm ] 0
Calentamiento adiabático del rotor 100°C; la fabricación del rotor es deranuras profundas de aluminio. En la fecha de preparación de este libro seha llegado a los 15.000 arranques.
En la norma DIN 57530 Parte 12 [véase referencia (21)J se dan reco-mendaciones para el arranque de motores comerciales con tensiones de1- ~ .•.••.•..•. t:.t:.(\ \!
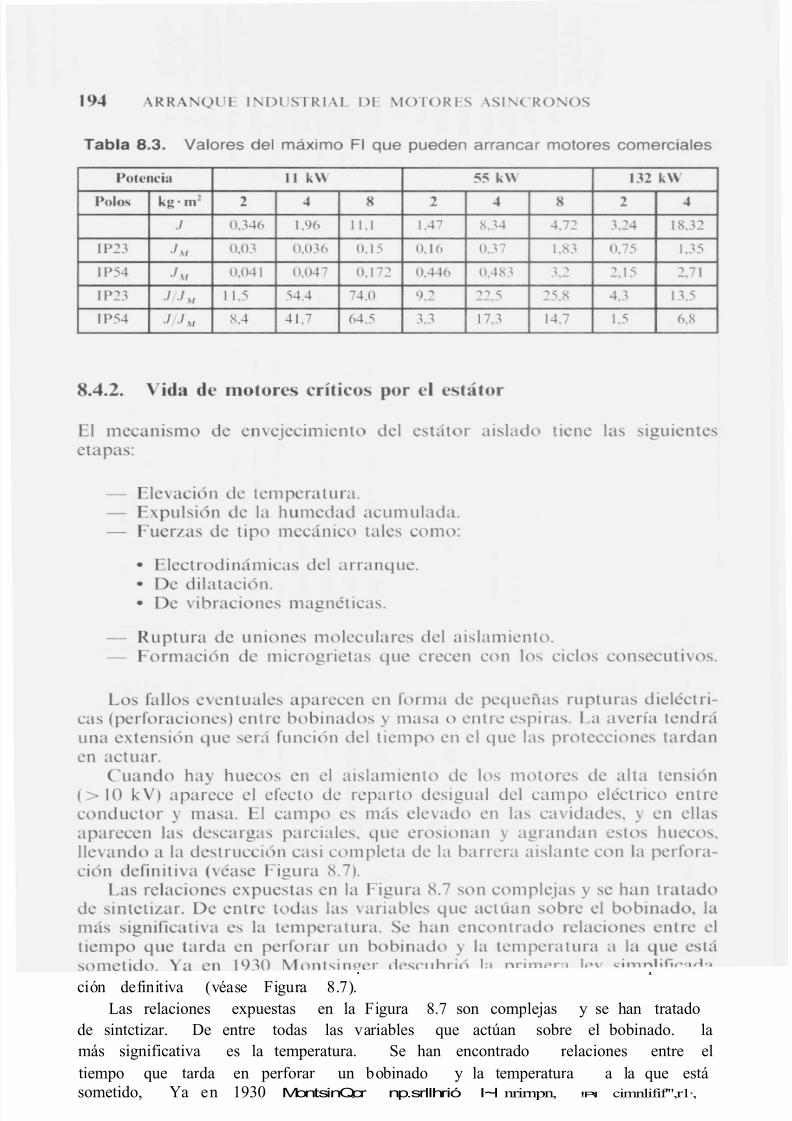
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 215/343
194 ARRANQUE I DUSTRIAL DE MOTORES ASINCRONOS
Tabla 8.3. Valores del máximo FI que pueden arrancar motores comerciales
Potencia 11 kW 55 kW 132 kW
Polos kg'm' 2 4 8 2 4 8 2 4
J 0,346 1,96 11,1 IA7 8,34 4,72 3,24 18,32
IP23 J It 0,03 0,036 0,15 0,16 0,37 1,83 0,75 1,35
IP54 J,/ 0.041 0,047 0.172 OA46 OA83 3,2 2.15 2.71
IP23 J J It 11.5 54,4 74,0 9.2 22,5 25,8 4,3 13.5
IP54 J/J M 8A 41,7 64,5 3,3 17,3 14,7 1,5 6,8
8.4.2. Vida de motores críticos por el estátor
El mecanismo de envcjecimiento del estátor aislado tiene las siguientesetapas:
Elevación de tcmperatura.
Expulsión de la humedad acumulada.Fuerzas de tipo mecánico tales como:
• Electrodinámicas del arranque.• De dilatación.• De vibraciones magnéticas.
Ruptura de uniones moleculares del aislamiento.Formación dc microgrietas que crecen con los ciclos consecutivos.
Los fallos evcntuales aparecen en forma de pequcñas rupturas dieléctri-cas (perforaciones) entre bobinados y masa o entre espiras. La avería tendráuna extensión que sed función del tiempo en el que las protecciones tardanen actuar.
Cuando hay huecos en el aislamiento de los motores de alta tensión(> 10 kV) aparece el efecto de reparto desigual del campo eléctrico entreconductor y masa. El campo es méls elevado en las cavidades. y en ellasaparecen las descargas parciales, que erosionan y agrandan estos huecos.llevando a la destrucción casi completa dc la barrera aislante con la perfora-ción definitiva (véase Figura 8.7).
Las relaciones expuestas en la Figura 8.7 son complejas y se han tratadode sintctizar. De entre todas las variables que actúan sobre el bobinado. lamás significativa es la temperatura. Se han encontrado relaciones entre eltiempo que tarda en perforar un bobinado y la temperatura a la que estásometido, Ya en 1930 MontsinQcr np.srllhrió I~l nrirnpn, !P\I cimnlifif'",r1·,
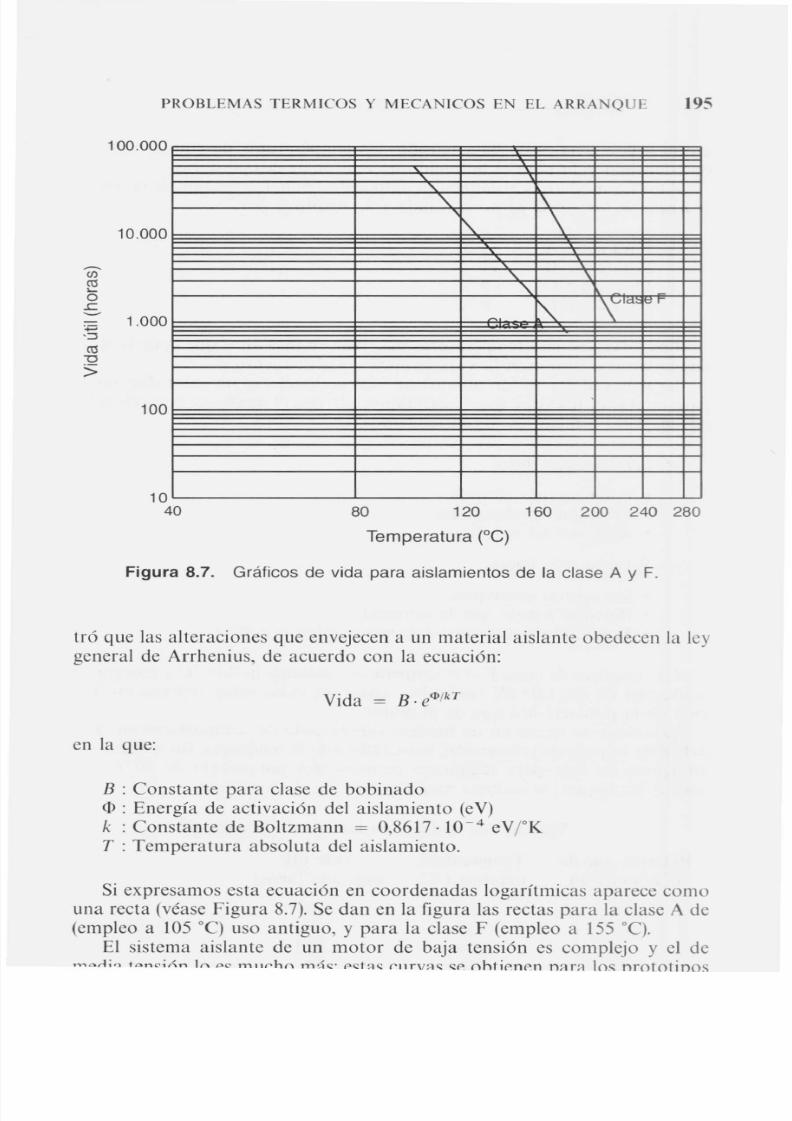
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 216/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 195
100.000
10.000
íilCil• . . .o
..c- 1.000: " 3Cil
"O
: >
100
"~ \
r\. \
"'\.
-, \. r \V id ~
10
40 80 120 160 200 240 280Temperatura (0C)
Figura 8.7. Gráficos de vida para aislamientos de la clase A y F.
tr6 que las alteraciones que envejecen a un material aislante obedecen la leygeneral de Arrhenius, de acuerdo con la ecuaci6n:
Vida = B· e<D/kT
en la que:
B : Constante para clase de bobinado<1>: Energía de activaci6n del aislamiento (eV)k : Constante de Boltzmann = 0,8617.10-4 eVrK T : Temperatura absoluta del aislamiento.
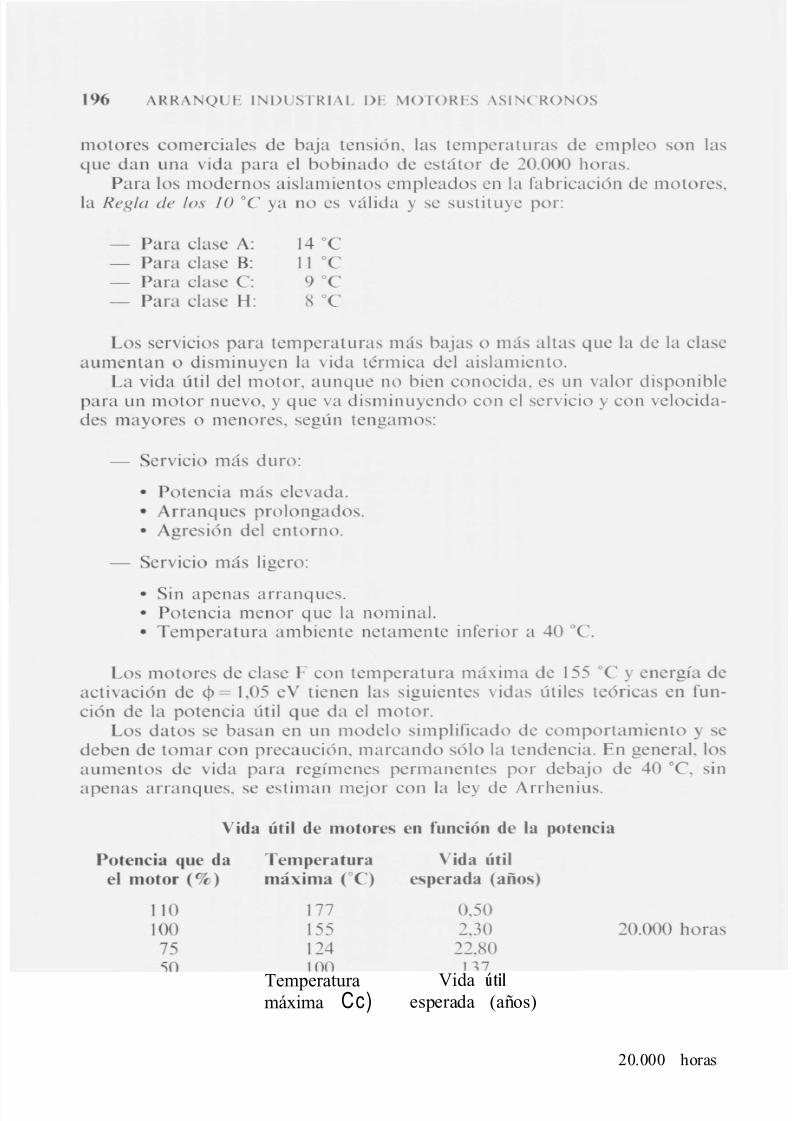
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 217/343
196 ARRANQ E IND STRIAL DE MOTORES ASINCRONOS
motores comerciales de baja tensión, las temperaturas de empleo son las
que dan una vida para el bobinado de estátor de 20.000 horas.Para los modernos aislamientos empleados en la fabricación de motores,la Regla de los lO °e ya no es válida y se sustituye por:
Para clase A:Para clase B:Para clase C:Para clase H:
14°eIloe
9°egoe
Los servicios para temperaturas más bajas o más altas que la de la claseaumentan o disminuyen la vida térmica del aislamiento.
La vida útil del motor, aunque no bien conocida, es un valor disponible para un motor nuevo, y que va disminuyendo con el scrvicio y con velocida-des mayores o menores, según tengamos:
Servicio más duro:
• Potencia más elevada.
• Arranques prolongados.• Agresión del entorno.
Servicio más ligero:
• Sin apenas arranqucs.• Potencia menor que la nominal.• Temperatura ambiente netamente inferior a 40°e.
Los motores de clase F con temperatura máxima de 155 °e y energía deactivación de < p = 1,05 e V tienen las siguientes vidas útiles teóricas en fun-ción de la potencia útil que da el motor.
Los datos sc basan en un modelo simplificado de comportamiento y sedeben de tomar con precaución, marcando sólo la tendencia. En general, losaumentos de vida para regímenes permanentes por debajo de 40 °e , sinapenas arranques, se estiman mejor con la ley de Arrhenius.
Vida ú til de motores en función de la potencia
Temperaturamáxima Cc)
Vida ú tilesperada (años)
20.000 horas
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 218/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRANQUE 197
En la mayor parte de los casos, los motores funcionan con temperaturas
ambiente inferiores a 40°C. La potencia media de utilización está en tornoal 75% en muchos servicios. Esto hace que la vida de muchos motoresalcance las decenas de años. En general se admite que la vida útil de unmotor comercial de baja tensión está en la banda de las 20.000 -'-30.000horas, siempre que funcione en condiciones nominales y sin arranquesduros.
En los motores de media tensión de plantas de proceso que accionanservicios de importancia, la práctica común es fabricarlos con clase F(155°C) Y emplearlos con calentamientos de clase B (130°C). Gracias a
esta medida, que no es costosa, los valores de vida útil que se manejan es-tán en torno a las 100.000 horas, siempre que no se consideren los arran-ques. Pero estos motores, normalmente críticos por el rotor, tienen lalimitación de su vida en el número de arranques permitidos para el rotor yen su dureza (véase Apartado 8.4.1).
8.4.3. La mejora de la vida útil de los motores graciasa los sistemas de arranque de intensidad reducida
Los métodos que reducen la intensidad absorbida de línea, y en consecuen-cia la del rotor, imagen de aquélla, tienen un efecto positivo alargando suvida y reduciendo los costes de mantenimento y pérdidas de producción por paradas intempestivas.
Entre todos los sistemas, el más correcto es del arrancador estático.Hasta la adopción de esta solución había muchos motores de arranquecrítico que se mantenían en servicio con potencia útil nula con el fin de noagotar esta vida expresada en arranques (véase Ejemplo 5.2).
Por tanto, las soluciones de arranque suave, favorecidas por estos dispo-
sitivos, tienen una justificación económica muy clara por los siguientesconceptos:
- Se evitan paradas muy costosas de la producción.- Disminuyen los gastos de reparación.
No es preciso mantener un alto almacén de repuestos.Al poder parar más veces al motor se ahorra energía.
No hay caídas de tensión en otros equipos y se puede evitar lainstalación de estabilizadores.
8.5. ENSAYOS ESPECIALES DE ARRANQUEPARA CUALIFICAR MOTORES
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 219/343
198 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
cir el comportamiento general del motor, pero hay algunos aspectos talescomo la predeterminación de la vida útil de un motor en forma de unnúmero dado dc arranques, que han de contrastarse con ensayos. Afortuna-damente, los ensayos no son absolutamente necesarios para todos los casos,sino únicamente para los de prototipos o cabezas de serie.
La realización de cálculos en los prototipos, y la posterior comproba-ción de los mismos con ensayos, vale para el ajuste de los modelos teóricosy así minimizar la necesidad de ensayos para los casos absolutamentenecesarIOs.
Deberemos correlacionar el resultado de los ensayos de vida expresadaen un número determinado de arranques con parámetros calculados. Entreéstos, son recomendables las energías disipadas:
W r en el rotar.W e en el estátor.
Las instalaciones para ensayos tienen costes crecientes con:
La potencia del mayor motor a ensayar.El grado de automatismo de la instalación.
Consecuentemente, estas instalaciones sólo se amortizan cuando el nú-mero de ensayos que se realiza es grande. En la referencia (22) se describe la plataforma que posee Electricité de France.
En la Figura 8.8 se ve el esquema de una plataforma de este tipo; almotor se le puede cargar del siguiente modo:
Con volantes de inercia ajustable para cada tipo de motor y para losdiferentes ensayos.Con frenos para dar el par resistente.
Los frenos que suministran el par resistente de acuerdo con distintostipos de máquinas accionadas son de tipos diversos:
Frenos hidráulicos.Frenos eléctricos.Frenos de fricción.
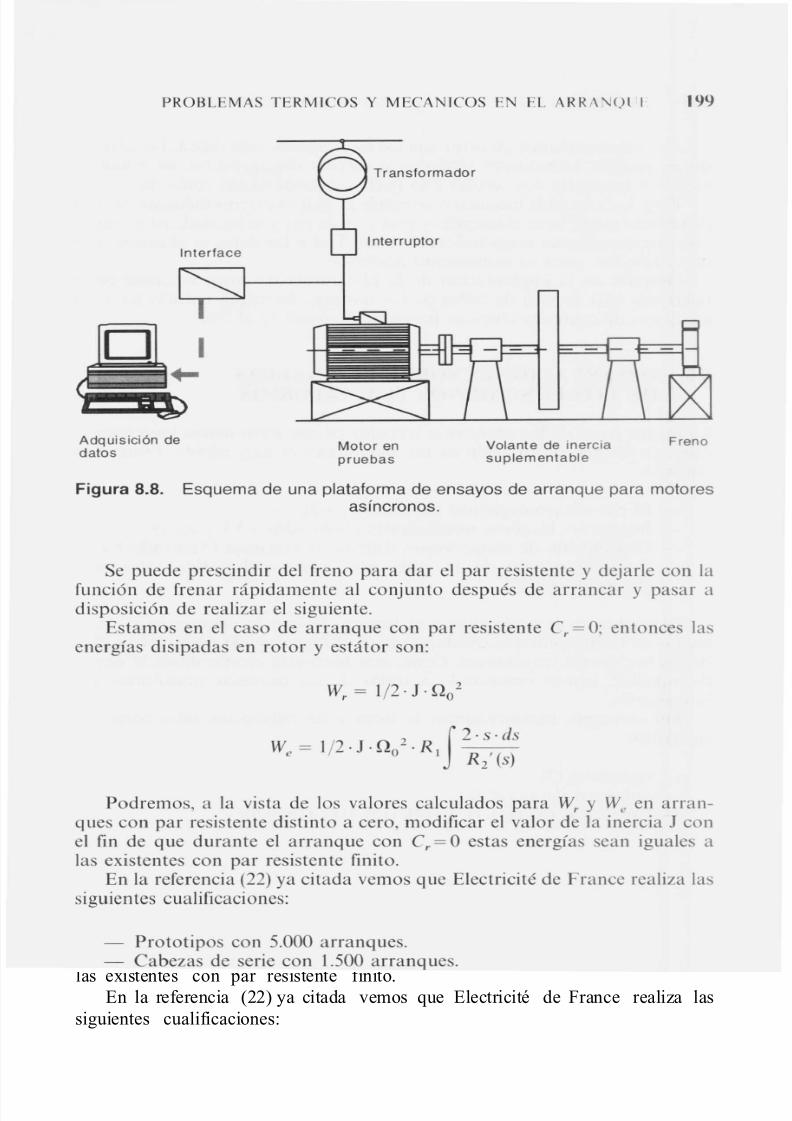
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 220/343
PROBLEMAS TERMICOS y MECANICOS EN EL ARRi\~()1 I 1l)l)
Interface
Transformador
Interruptor
Adquisición dedatos
Motor enpruebas
Volante de inerciasuplementable
Freno
Figura 8.8. Esquema de una plataforma de ensayos de arranque para motoresasíncronos.
Se puede prescindir del freno para dar el par resistente y dejarle con lafunción de frenar rápidamente al conjunto después de arrancar y pasar adisposición de realizar el siguiente.
Estamos en el caso de arranque con par resistente Cr = O; entonces lasenergías disipadas en rotar y estátor son:
Podremos, a la vista de los valores calculados para Wr y We en arran-ques con par resistente distinto a cero, modificar el valor de la inercia J conel fin de que durante el arranque con Cr=O estas energías sean iguales a
las existentes con par resistente finito.En la referencia (22) ya citada vemos que Electricité de France realiza las
siguientes cualificaciones:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 221/343
200 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Los calentamientos dc rotar son los de medición más difícil. Lo adecua-
do es realizar termopares soldados a puntos determinados de barras yanillos y transmitir sus señales a la parte estacionaria sin contacto.Para los esfuerzos mecánicos se emplean galgas extensométricas. Se han
de realizar mediciones dinámicas y estáticas de par y velocidad, así como delas correspondientes magnitudes eléctricas. Todos los datos se almacenan enun ordenador, para su tratamiento posterior.
Después de la implantación de la plataforma de ensayos citada en lareferencia (22), la tasa de fallos de los motores de media tensión para losauxiliares de centrales térmicas francesas bajó del 12 al 3%.
8.6. OBSERVACIONES SOBRE EL ANALISISDE LOS FENOMENOS TRANSITORIOS
La mayor parte de los problemas tratados en este libro tienen fases tempo-rales, en las que la variación de las magnitudes es muy rápida. Entre ellastenemos:
El par electromagnético (Apartado 2.1.2).Regímenes térmicos intermitentes (Apartados 8.1.1 y 8.1.2).Distribución de temperaturas durante el arranque (Apartado 8.1.3).Comportamiento de la jaula ante pares pulsatorios torsionales(Apartado 8.2.4).
Al ingeniero de aplicación y al usuario lo que le interesa es el valor medio de las magnitudes, quedando para el ingeniero de diseño el análisisde los fenómenos transitorios. Como este libro está escrito desde la óptica
de aquéllos, hemos renunciado a tratar de los procesos transitorios taninteresantes.Sin embargo, recomendamos la lectura de referencias tales como las
siguientes:
Generales (3).Sobre arranque (7), (8).Específicas (6), (1 1), (13), (14). (15), (18). (19), (20).
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 222/343
CAPITULO
NUEVEESPECIFICACIONES DE LOS COMPONENTES
DE LOS EQUIPOS DE ARRANQUE
Vamos a describir en este capítulo las principales características empleadas para especificar los equipos de arranque más normalmente empleados. Pre-tendemos que sirva como guía para el establecimiento de las especificacio-nes de un modo de arranque determinado. Toda descripción de un equipode arranque deberá comenzar con la lista de las condiciones para las que elequipo se diseña.
Las directrices para especificar el arrancador estático, debido a su parti-cularidad, están en el Apartado 4.1.5.
9.1. CONDICIONES DE DISEÑO DE UN EQUIPODE ARRANQUE
Estas condiciones constituyen los datos de entrada del problema. Es impor-tante establecerlas de modo que representen a la realidad de forma correcta.A continuación viene la relación de las más importantes:
- Condiciones ambientales de la instalación:
• Temperatura, humedad, gases explosivos, altitud, polvo en suspen-sión, ácidos, gases corrosivos, ambiente salino.
- Condiciones del motor a arrancar:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 223/343
202 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
• Factor de potencia en el arranque.• [nercia del motor.• Tensión e intensidad rotóricas.• Número de arranques a la hora exigidos.• Posibilidades de motor de MT en vez de ST.
Condiciones de la máquina accionada:
• Tipo de acoplamiento mecánico, engranaje o correas, con el motor.• Inercia.
• Posibilidad de arranque en vacío.• Curva de par resistente.• Servicio necesario.• Otras máquinas funcionando en paralelo con su secuencIa de
arranque.
Condiciones de la red y del transformador de alimentación:
• Capacidad de cortocircuito en el punto de conexión (véase Ca- pítulo 6). Se indicará si es delante o detrás del transformador dealimentación.
• Potencia aparente del transformador.• Tensiones primaria y secundaria en vacío.• Tensión de cortocircuito.• Pérdidas en el cobre.• Pérdidas en el hierro.• Si el transformador alimenta otras cargas, dar sus valores sobre
todo en la fase de arranque.
9.2. CARACTERISTICAS DE LOS CO TACTORES
En la mayor parte de los casos estaremos aplicando contaetores de bajatensión. Sólo en circunstancias especiales habrá que acudir a interruptoresy/o contactores de media tensión. En consecuencia, este apartado se dedica
fundamentalmente a aquéllos.Antes de entrar de lleno en los contactores y en sus características, laclasificación general que indica el tipo de elemento de maniobra es la que dainformación sobre:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 224/343
COMPONENTES DE LOS EQUIPOS DE ARRANQUE 203
9.2.1. Elección de contactores
Como se indica en el Apéndice A.2A, las categorías de los contactores se-gún el servicio son:
AC-2.AC-3.AC-4.
Arranque de motores de anillos.Arranque de motores de rotor en cortocircuito.Frenado a contracorriente de motores de cortocircuito oanillos.
Las especificaciones se refieren a las características siguientes:
Corrientes nominales en función de la tensión nominal:
• En AC-2.• En AC-3.
• En AC-4.
Límites de la tensión nominal (según CEI, 85 a 110% U N )'
- Tensión nominal de aislamiento y, en consecuencia, tensiones deensayo dieléctrico.Poder de corte.Poder de cierre.Factor de marcha:
FM = tlT
t : duración del paso de corrienteT: duración del ciclo
Corriente térmica máxima durante 8 horas.Circuito de mando en corriente alterna o continua.
- Temperatura ambiente máxima de empleo.- Número y tipo de contactos auxiliares.- Tensión del circuito de mando.- Altitud del lugar de instalación.- Curvas de vida eléctrica en función de la intensidad cortada.- Curvas de vida mecánica en función del número de maniobras sin
corriente.Resistencia a choques y a vibraciones.
- Potencia disipada por polo.- Impedancia por polo entre la borna de entrada y de salida.- r::lr::lrtf'rí"tir.::l" Of't::lI1::l0::l" del circuito de mando.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 225/343
204 ARRANQ E 1 DUSTRIAL DE MOTORES ASINCRONOS
9.2.2 Contactores para arranque de motores de cortocircuito
Son para servicio mixto AC3 AC2-AC4 y con cortes durante el arranque oel frenado y después del arranque.
Este servicio se llama también mixto, ya que el contactar puede cortar lacorriente durante cualquier fase del servicio del motor. La corriente que seva a cortar tiene un valor intermedio entre la nominal y la de arranque. Losciclos de maniobras se clasifican como sigue.
AC3. Ciclos que terminan cuando el motor cst<Í arrancado o cortando unacorriente nominal inferior a la del motor.
AC2-AC4. La corriente es cortada durante la aceleración o el frenado delmotor y es superior a la nominal del motor. Se opera de la formasiguiente:
Si el número de maniobras deseado es N. tendremos que:
N J : Vida eléctrica para corte con la intensidad nominal N 4 : Vida eléctrica para corte con intensidad de corte de arranque y
frenado = K· 1.\,
K : Multiplicador de corriente a rotar calado ~6l,y : Corriente nominal del motor X : Porcentaje de cortes durante arranque o frenado.
En la Figura 9. J se vc el gráfico de vida eléctrica para X = 20% de
servicio AC2 o AC4.Las condiciones de servicio se pueden clasificar como sigue:
Servicio normal: 99,9% AC3 + O,1% AC4Servicio difícil: 50% AC3 + 50% AC4Servicio extremo: 100% AC4
9.2.3. Contactores para motores de rotor bobinado
Tienen dos funciones para la regulación por escalones de las resistencias delcircuito rotórico:
Eliminación de resistencias de los escalones intermedios.Cortocircuito final del rotar.
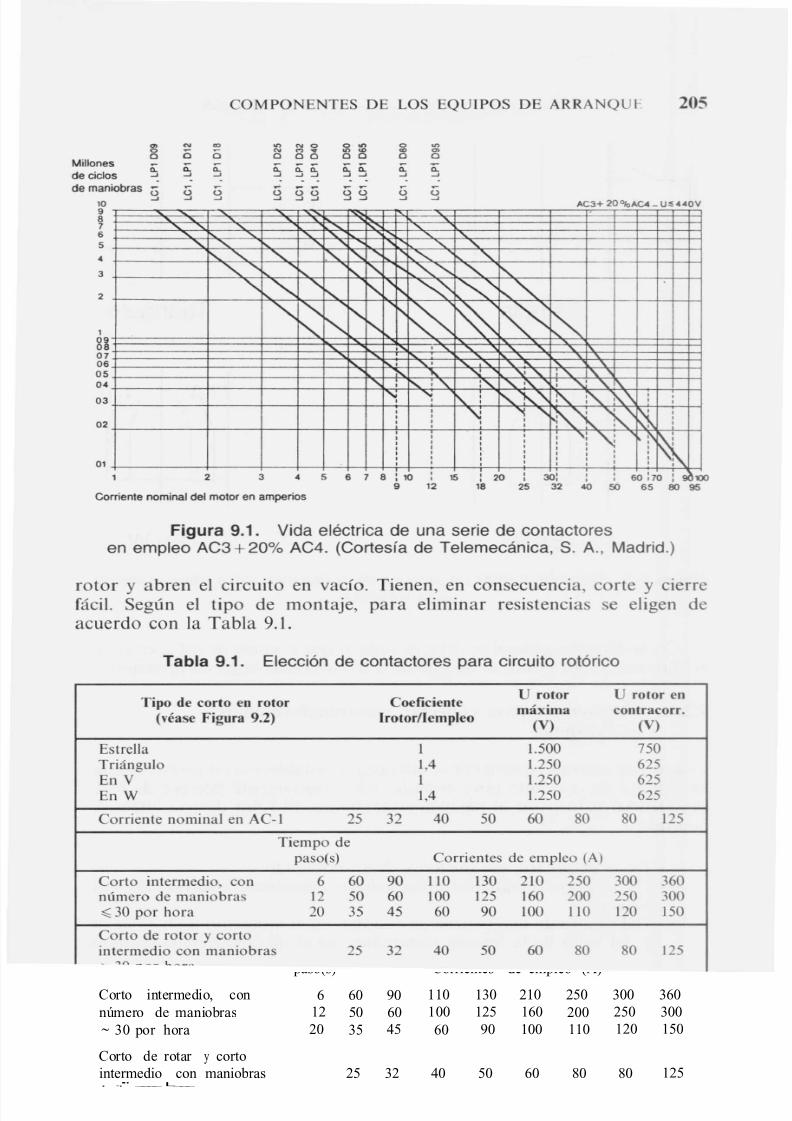
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 226/343
COMPONENTES DE LOS EQUIPOS DE ARRANQUI-. 205
Corriente nominal del motor en amperios
. . . . . . . . . . . . . . . '-'"" '" " - " " -
" ," - ,. . • . . • . • . ,• . . • . . . .
. . • . . • . . . .
.",
. • . . • . . . .~ ~' , " . . . . . . . .
" -
""
. • . . • . . . .
~ ~ " 0
~
" -
• • • • . . • . . . . . • . . • . . . .
,, ,
" - ' " ' 0 0 : ' - , '- ,'- ", " "
,,", , ,: ,'i ': 1\ . . • . . • . . . . ~ '\ r\. r\. 1 ,\
, ,, ,, , '\; i . 1 \ .~ ' \ . " ~
,, , ,,:,
, , ,' 1 ~ ~~
, ,, , , ¡ 1, ¡ , , , ,, , , , ,, , , ,, , : ' , ,
1 2 3 • 5 6 7 8 :10,
15 20,
30:, : 60 :70 : S, , ,
N '" ' " No g '" o ' "Ó Ó N M . . •
"' ' " a>o o o o o o o
~ ; ;: ;; : ; ; : ;; : ;; : ;; : ;; : ~-' -' -' -' -' -' -'
" § § " " " " § §-' -' -' -' -' AC3+ 20"toAOl_ U~ •• OV
l'lo
Millones O;
de ciclos -:
de maniobras §'09876
5
•
1
8 ü070605
o .
03
02
o,
9 '2 18100
25 32 (Q 50 65 80 95
Figura 9.1. Vida eléctrica de una serie de contactoresen empleo AC3+20% AC4. (Cortesía de Telemecánica, S. A., Madrid.)
rotor y abren el circuito en vacío. Tienen, en consecuencia, corte y cierre
fácil. Según el tipo de montaje, para eliminar resistencias se eligen de
acuerdo con la Tabla 9.1.
Tabla 9.1. Elección de contactores para circuito rotórico
Tipo de corto en rotor Coeficiente U rotor U rotor enmáxima contracorr.
(véase Figura 9.2) IrotorlIempleo(V) (V)
Estrella 1 1.500 750Triángulo 1,4 1.250 625En V 1 1.250 625En W 1,4 1.250 625
Corriente nominal en AC-l 25 32 40 50 60 80 80 125
Tiempo de
paso(s) Corrientes de empleo (A)Corto intermedio, con 6 60 90 110 130 210 250 300 360número de maniobras 12 50 60 100 125 160 200 250 300~ 30 por hora 20 35 45 60 90 100 110 120 150
Corto de rotar y cortointermedio con maniobras 25 32 40 50 60 80 80 125, .,'" ____ L___
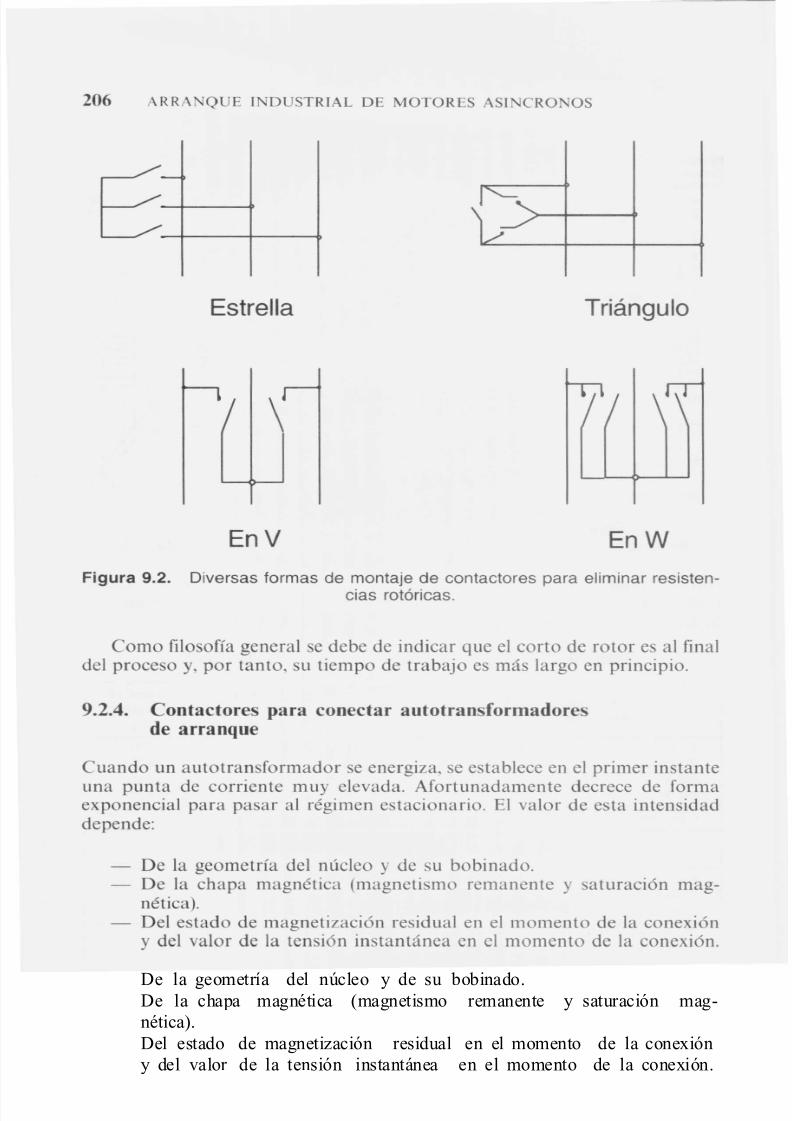
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 227/343
206 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Estrel la Tr iángu lo
\
En V EnW
Figura 9.2. Diversas formas de montaje de contactores para eliminar resisten-cias rotóricas.
Como filosofía general se debe de indicar que el corto de rotar es al finaldel proceso y, por tanto, su tiempo de trabajo es más largo en principio.
9.2.4. Contactores para conectar autotransformadoresde arranque
Cuando un autotransformador se energiza, se establece en el primer instanteuna punta de corriente muy elevada. Afortunadamente decrece de formaexponencial para pasar al régimen estacionario. El valor de esta intensidaddepende:
De la geometría del núcleo y de su bobinado.De la chapa magnética (magnetismo remanente y saturación mag-nética).Del estado de magnetización residual en el momento de la conexióny del valor de la tensión instantánea en el momento de la conexión.
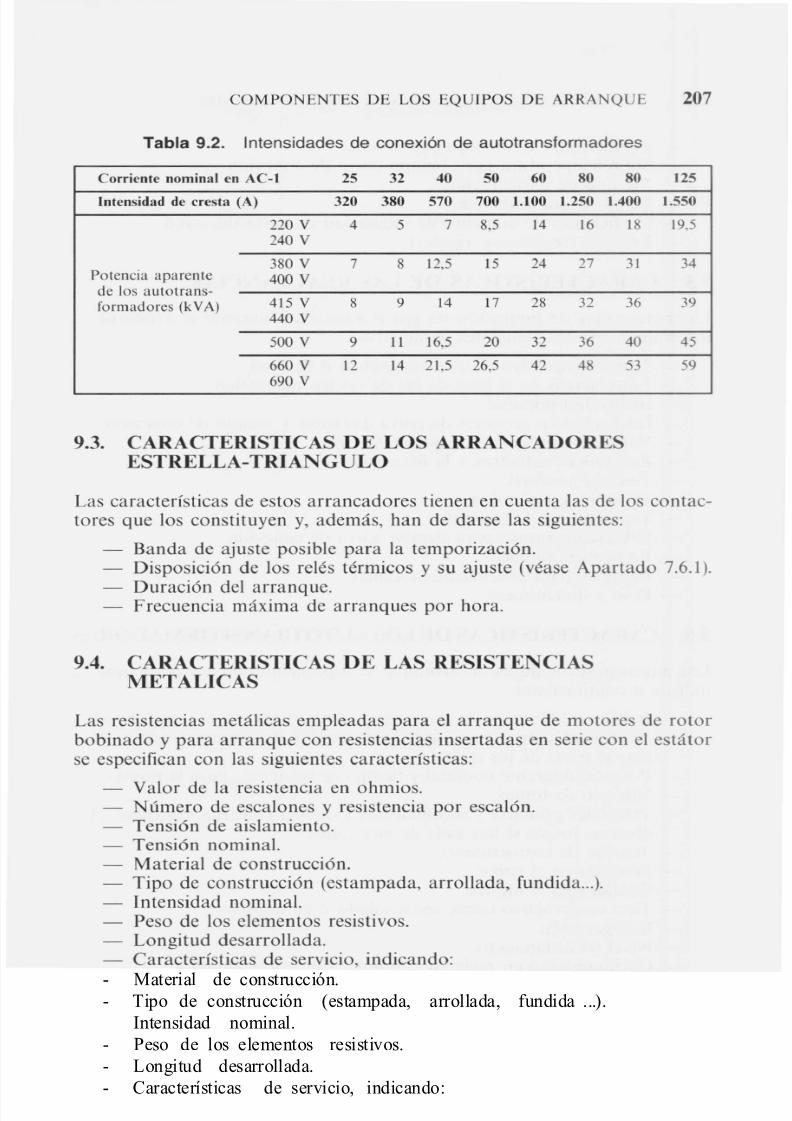
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 228/343
COMPONENTES DE LOS EQUIPOS DE ARRANQUE 2 0 7
Tabla 9.2. Intensidades de conexión de autotransformadores
Corriente nominal en AC-I 2 5 3 2 4 0 5 0 6 0 8 0 8 0 1 2 5
Intensidad de cresta (A) 3 2 0 3 8 0 5 7 0 7 00 1 . 1 00 1 . 2 5 0 1 . 4 00 1 . 5 50
2 2 0 V 4 5 7 8 , 5 1 4 1 6 1 8 1 9 , 52 4 0 V
3 8 0 V 7 8 1 2 , 5 1 5 2 4 2 7 3 1 3 4Potencia aparente 4 0 0 V
de los autotrans-formadores (k VA) 4 1 5 V 8 9 1 4 1 7 2 8 3 2 3 6 3 9
4 4 0 V
5 0 0 V 9 1 1 1 6 , 5 2 0 3 2 3 6 4 0 4 56 6 0 V 1 2 1 4 2 1 , 5 2 6 , 5 4 2 4 8 5 3 5 96 90 V
9.3. CARACTERISTICAS DE LOS ARRANCADORESESTRELLA- TRIANGULO
Las características de estos arrancadores tienen en cuenta las de los contac-
tores que los constituyen y, además, han de darse las siguientes:
Banda de ajuste posible para la temporización.Disposición de los relés térmicos y su ajuste (véase Apartado 7.6.1).Duración del arranque.Frecuencia máxima de arranques por hora.
9.4. CARACTERISTICAS DE LAS RESISTENCIAS
METALICASLas resistencias metálicas empleadas para el arranque de motores de rotor bobinado y para arranque con resistencias insertadas en serie con el estátor se especifican con las siguientes características:
- Valor de la resistencia en ohmios.- Número de escalones y resistencia por escalón.- Tensión de aislamiento.- Tensión nominal.
- Material de construcción.- Tipo de construcción (estampada, arrollada, fundida ...).
Intensidad nominal.- Peso de los elementos resistivos.- Longitud desarrollada.- Características de servicio, indicando:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 229/343
208 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
- Temperatura de trabajo permanente.Sobretemperatura para tiempo corto de conexión.Método de refrigeración.Temperatura ambiente.Coeficientes de aumento de intensidad en corta duración.
- Ensayos (resistencia, rigidez).
9.5. CARACTERISTICAS DE LAS REACTANCIAS
Las reactancias de limitación de par e intensidad durante el arranque sedeterminan con los siguientes parámetros:
- Tipo constructivo (núcleo magnético o de aire).Entrehierros en el caso de las de núcleo magnético.1ntensidad nominal.1ntensidad en servicios de corta duración y tiempo de conexión.Valor del coeficiente de autoinducción.Reactancia inductiva a la frecuencia de red.Tensión nominal.Tensión de aislamiento.
- Temperatura de trabajo.Sobretemperatura para tiempo corto de conexión.Resistencia óhmica.Pérdidas para la corriente nominal.Peso y dimensiones.
9.6. CARACTERISTICAS DE LOS AUTOTRANSFORMADORES
Los autotransformadores de arranque se especifican con los datos que se
indican a continuación:1ndicar si la función de arranque está realizada por el transformador de alimentación o hay autotransformador de arranque, como en lamayor parte de los casos.Potencia aparente nominal y tiempo de referencia para la misma.
Número de tomas.Tensiones primaria y secundarias en vacío y en carga, referirlas a lasdiversas tomas si hay más de una toma.Tensión de cortocircuito.Pérdidas en el cobre.
- Pérdidas en el hierro.- Tipo constructivo (seco, encapsulado o en aceite).
Refrigeración. Nivel de aislamiento.Calentamiento en régimen continuo v de corta dur::lción
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 230/343
CAPITULO
DIEZAPLICACIONES Y SELECCION
DE LOS MODOS DE ARRANQUE
En los capítulos anteriores de este libro han sido tratados con el detallenecesario las características de los motores eléctricos asíncronos, junto consus máquinas accionadas y el proceso de arranque del conjunto.
Al ser esta obra de carácter práctico, se van a describir las aplicacionesde cada modo de arranque. A continuación se establecerán directrices es-quemáticas para que el lector pueda seleccionar el arranque adecuado a sucaso particular.
Se recuerda que la elección idónea depende de aspectos tales como:
Descripción de todo el accionamiento compuesto por:
• Motor.
• Máquina.• Acoplamientos.• Auxiliares.
El punto de conexión del motor y su situación en la red.Las condiciones especificadas de caída de tensión en los diferentes puntos de la red.La especificación de aceleración si ha de ser controlada.Los precios de los diversos equipos previstos.
La vida útil y los costes de mantenimiento del motor y eqUiposasociados.La eficiencia energética de la solución encontrada.El coste energético (término de potencia y energía).Requisitos adicionales tales como:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 231/343
210 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La variación de cualquiera de estas características puede hacer que lasolución cambie sobre la inicial. También en muchas ocasiones ésta no esúnica y algunas pueden ser bastante equivalentes. En estos casos es necesa-rio un análisis mucho más completo y detallado para poder hacer el descar-te final.
Por contra, en los casos más sencillos basta con una breve reflexión paradecidir cuál es el modo más adecuado.
10.1. CAMPOS DE APLICACION DE CADA
TIPO DE ARRANQUEA continuación vamos a describir los campos de aplicación de los modos dearranque más empleados en la práctica. De todos los analizados en los Ca- pítulos 3 y 4, los más frecuentes son:
Motores de rotor bobinado o de anillos:
• Arranque con resistencias en su circuito de rotor.
Motores de rotor en cortocircuito:
• Arranque directo.• Arranque estrella-triángulo.• Arranque con autotransformador.• Arranque con resistencias en serie con el estátor.• Empleo del arrancador estático suave.
Todos menos el último se emplean desde hace muchos años; el arranca-
dor estático es de aparición posterior y ofrece, en la mayor parte de los ca-sos, una solución muy interesante. Sus aplicaciones crecen día a día, pero podemos considerar que está en fase de difusión todavía; a ello contribuyela mejora de sus prestaciones y la bajada relativa de su precio. Es muyconveniente impulsar su aplicación, que es válida para muchos casos, aun-que no para todos. Es muy recomendable que tanto fabricantes como or-ganismos de normalización y clasificación realicen esfuerzos en las siguien-tes direcciones:
- Normalizar sus características y dimensiones.Facilitar datos técnicos detallados.
- Dar directrices para que los usuarios los puedan elegir.
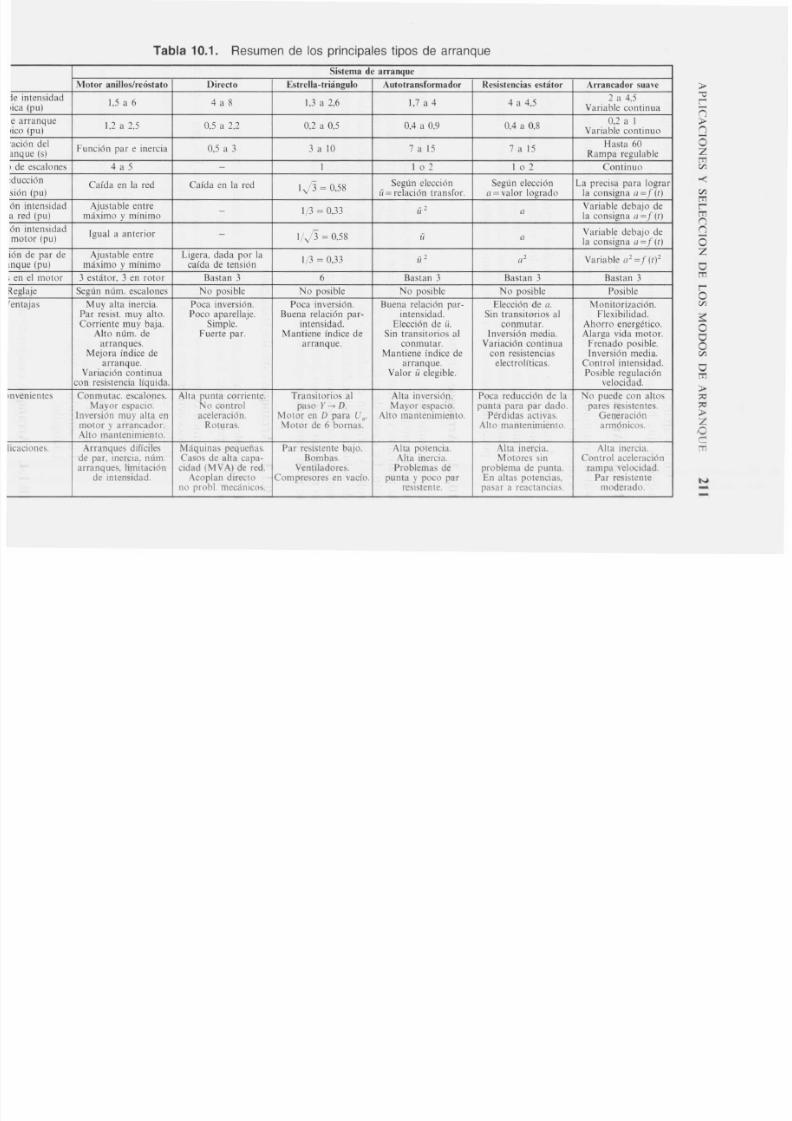
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 232/343
Tabla 10.1. Resumen de los principales tipos de arranque
Sistema de arranque
Motor anil los!reóstato Directo Estre lla- triángulo Autotransformador Resistencias es tá tor Arrancador suave
tensidad1.5 a 6 4 a 8 1.3 a 2,6 1,7 a 4 4 a 4,5
2 a 4,5(pu) Variable continua
ranque1,2 a 2,5 0,5 a 2,2 0,2 a 0,5 0,4 a 0,9 0,4 a 0,8
0,2 a I(pu) Variable continuo
n delFunción par e inercia 0,5 a 3 3 a 10 7 a 15 7 a 15
Hasta 60e (s) Rampa regulable
escalones 4 a 5 - I I 02 I 02 Continuo
ciónCaída en la red Caída en la red 1.)3 =0,58
Según elección Según elección La precisa para lograr
(pu) ii =relación transíor. a =valor logrado la consigna a =J ( t)
ntensidad Ajustable entre - 1 3 =0.33 ü 2 a Variable debajo de
d (pu) máximo y mínimo la consigna a =J ( t)
ntensidad Igual a anterior - 1/.)3 =0,58 Variable debajo de
or (pu) ti a la consigna a =J ( t)
de par de Ajustable entre Ligera, dada por la1/3 =0,33 ü 2 a2 Variable a 2 =J ( t )2
(pu) máximo y mínimo caída de tensión
el motor 3 estátor. 3 en rotor Bastan 3 6 Bastan 3 Bastan 3 Bastan 3
aje Según núm. escalones No posible No posible No posible No posible Posible
as Muy alta inercia. Poca inversión. Poca inversión. Buena relación par- Elección de 1 1 . Monitorización.Par resis!. muy alto. Poco aparellaje. Buena relación par- intensidad. Sin transitorios al Flexibilidad.Corriente muy baja. Simple. intensidad. Elección de ii. conmutar. Ahorro energét ico.
Alto núm. de Fuerte par. Mantiene índice de Sin transitorios al Inversión media. Alarga vida motor.arranques. arranque. conmutar. Variación continua Frenado posible.
Mejora índice de Mantiene índice de con resistencias Invers ión media.arranque. arranque. electrolíticas. Control intensidad.
Variación continua Valor ii elegible. Posible regulacióncon resistencia líquida. velocidad.
ientes Conmutac. escalones. Alta punta corriente . Transitorios a l Alta inversión. Poca reducción de la No puede con altosMayor espacio. No control paso y ....• D. Mayor espacio. punta para par dado. pares resistentes.
Inversión muy alta en aceleración. Motor en D para U". Alto mantenimiento. Pérdidas act ivas . Generaciónmotor y arrancador. Roturas. Motor de 6 bornas. Alto mantenimiento. armónicos.Alto mantenimiento.
ones. Arranques difíciles Máquinas pequeñas. Par resistente bajo. Alta potencia. Alta inercia. Alta inercia.de par, inercia, núm. Casos de alta capa- Bombas. Alta inercia. Motores sin Control aceleraciónarranques, limitación c idad (MVA) de red. Vent iladores. Problemas de problema de punta. rampa velocidad.
de intensidad. Acoplan directo Compresores en vacío. punta y poco par En a ltas potencias. Par res istenteno probl. mecánicos. resistente. pasar a reactancias. moderado.
»vr
(")
»(")
2 5zmC Z J
- <C Z Jmr m(")
(")
2 5zOm
r OC Z J
s : :OOOC Z J
Om
»; : < : l; : < : l
»Z.oem
N-
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 233/343
212 ARRANQUE 1 DUSTRIAL DE MOTORES ASINCRONOS
En los apartados que vienen a continuación ampliamos algunos de los
aspectos que han quedado resumidos en la Tabla 10.1.
10.1.1. Arrancadores para motores de rotor bobinado
Valen para máquinas con par resistente de valor tan elevado como sea, y enlos casos en los que a la vez se especifica:
Arrancar con puntas de intensidad limitada, sin que baje el par motor, que es lo que sucede en los arranques por resistencia, auto-transformador, estrella-triángulo, arrancador estático.Realizar regulaciones de velocidad ocasionales de corta duración con
poca influencia sobre el consumo energético.
10.1.2. Arranque directo
Es adecuado para motores y redes en las que la intensidad durante elarranque no presenta problemas y no importan los esfuerzos sobre el motor,la máquina y la transmisión. Es sencillo de instalación y de pequeña inver-sión. En casos de arranques críticos, pueden aparecer roturas de barras derotor y fatiga en el bobinado de estátor, fisuras, deformaciones de cabezasde bobinas y fallos dieléctricos al final. Es válido para motores pequeños omotores grandes con cargas fuertes en redes potentes. El acoplamiento conla máquina ha de ser directo; un acoplamiento directo elástico es convenien-te para amortiguar golpes de par.
10.1.3. Arranque estrella-triángulo
Es aplicable a máquinas cuyo par resistente durante el arranque sea inferior a 1/3 del par motor. Con este método se logra:
- Reducir corriente en línea durante el arranque a 1/3, por lo que bajaconsecuentemente la caída de tensión en línea.
- Reducir el par motor a 1/3 para suavizar los esfuerzos mecánicossobre la máquina accionada y la transmisión.
Para aplicar este arranque, los requisitos han de ser:
Ambos extremos de fase del bobinado de estátor del motor han desalir a la caja de bornas (6 bornas).La tensión de línea ha de coincidir con la tensión del motor entriángulo.
10.1.4. Arranque mediante autotransformador
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 234/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUE 213
Disminuir la intensidad de arranque al valor especificado (pudiendo
elegir libremente la relación del autotransformador), con lo que sereduce la caída de tensión en línea en la misma proporción.- Reducir el par motor para suavizar los esfuerzos mecánicos sobre la
máquina y la transmisión; su disminución es proporcional a la reduc-ción de la intensidad en línea.
Respecto al arranque estrella-triángulo, tiene las ventajas:
Elegir la intensidad y par deseados.- Realizar arranque en varios escalones siempre que los tenga el auto-
transformador.- Continuidad de la tensión en el motor durante la conmutación.
10.1.5. Arranque con resistencias en serie con el estátor
La tensión en bornas cambia gradualmente, ya que la caída de tensiónocasionada por la corriente más fuerte al comienzo es variable decreciente.En este modo de arranque se presenta el problema que el par de arranquecae en mayor proporción que la limitación de la corriente absorbida de
línea. Si se realizan escalones, presenta problemas en la conmutación de losmismos.
10.1.6. Empleo del arrancador estático suave
Dentro de las consideraciones dadas al principio del Apartado 10.1 hemos justificado la mayor amplitud dedicada al arrancador estático. Comenzare-mos por la relación de las aplicaciones más recomendadas:
- Bombas de calor, bombas de Iodos, bombas de vacío, equipos delavado a presión.- Ventiladores axiales y centrífugos, soplantes, aire acondicionado.- Compresores.- Tornillos de Arquímedes para plantas de tratamiento de aguas re-
siduales.Máquinas textiles para evitar roturas.Machacadoras, trituradores.Ascensores y grúas, remontes de ski.Bobinadoras, desenrollado ras.Máquinas herramientas, herramientas portátiles.Cizallas, enderezado ras, pequeños laminadores, caminos de rodillos.Máquinas de imprimir.Equipos de manipulación de grano, molinos.Sistemas transportadores.V;hr.,rl •...•rpc ;nrlllctr;<:l lp< :
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 235/343
214 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Se emplearán arrancadores estáticos siempre que se desee:
Reducir corrientes y bajar las caídas de tensión en la línea de alimen-tación.Limitar el par de arranque y proteger la transmisión mecánica.Acelerar, decelerar y parar suavemente para seguridad y confort de
personas u objetos transportados.Arrancar progresivamente máquinas de alta inercia.Aliviar a los motores y las máquinas de la energía de pérdidas de-generada tras muchos arranques.
- Arrancar sucesivamente varios motores con un solo arrancador.
10.1.7. Algunas aplicaciones concretas de arrancadores estáticos
A continuación resumimos algunas aplicaciones extraídas de catálogos defabricantes. Indicamos que se deben de tomar como orientativas y que losdatos que presentan no son directamente extrapolables a cualquier si-tuación.
l.er caso
Arrancadores situados en el aeropuerto británico de Heathrow. Empleadosen los motores de accionamiento de las escaleras y cintas de la terminal 4.La potencia total de motores es de 1,7 MW. Hay ocho cintas que mueven4.000 personas por hora y están en servicio permanente desde las cincohasta las veintitrés horas. Como las cargas son muy bajas a ciertas horas, selogra ahorro energético. Los motores son de 15 kW.
Los datos facilitados son los siguientes:
kW
cos < 1 >
TensiónIntensidad
Sin economía
7,20,51
4221 9
Resulta un ahorro diario
18 horas x (7,2 - 5,6) x 8 motores
Con economía
5,60,53
3601 7
230,4 kWh
2.° caso
y un ahorro anual =
230,4 x 365 = 84.096 kWh/año
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 236/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUE 215
posibilidad de evitar el aumento en la potencia contratada. Los motores
eran de 145/200 kW a 1.500/3.000 r.p.m. Las velocidades se eligen paracada proceso de forma diferente. El molino tiene una inercia fuerte. Losarrancadores estáticos funcionan con una rampa de tensión entre 20 y 30 s.Se instaló el arrancador delante de ambos bobinados del motor.
3.er caso
En una planta de productos farmacéuticos los arrancadores suaves en mo-tores de 400 kW han logrado reducir la punta de 6.000 a 2.000 A. El tiempo
de arranque se ajusta entre 2 y 60 s.
4.° caso
Arrancadores destinados a motores asíncronos que accionan pulpers. Losmotores son de 250 kW, 415 A, Y originariamente arrancaban en estrella-triángulo con puntas de hasta 2.500 A en la transición, originando notablesesfuerzos mecánicos y electromagnéticos. El coste de mantenimiento eraelevado. Se logró un arranque con punta de 800 A Y 30 s de duración con el
pu lper en carga.
5.° caso
Se trata de un accionamiento de machacadoras de conos en una cantera, envez de motores de anillos convencionales con reóstato de arranque. Seminimizan los esfuerzos mecánicos en la machacadora y las paradas por averías. Se evitan los problemas de la conmutación entre escalones. Losmotores tienen potencias entre 45 y 186 kW.
6.° caso
Es el del arranque de los motores de accionamiento de los ventiladores derenovación de aire de un gran hotel. Las potencias de motores están entre16 y 33 kW. También se regula la velocidad del motor disminuyendo latensión y así obtener control de caudal. Los motores seleccionados eran dealto par y deslizamiento relativamente elevado, de este modo se obtienenaumentos de deslizamiento. El método de regulación no es eficiente del
todo, pero como se emplea durante un número moderado de horas, el ba-lance económico global es positivo.Después de estos casos prácticos hacemos algunas consideraciones para
la aplicación de los arrancadores estáticos en determinados accionamientos.
Accionamiento de ascensores hidráulicos
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 237/343
216 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Estos ascensores necesitan más potencia motriz al no tener contrapeso,
resultando del orden del doble. En consecuencia, las puntas de arranqueserán aproximadamente dobles. Este tipo de ascensor es muy adecuado para rehabilitaciones; sin embargo, en estos casos las redes son más débiles, pues están en cascos urbanos. Podemos limitar la corriente de arranque conarrancador estático a valores de 1,4 a 1,9 la nominal. Los equipos para estaaplicación han de servir para 60 o 120 arranques hora.
Arranque de compresores de climatización
Con el arrancador estático se logran puntas de 1,5 a 2,5 veces. Los tiemposde arranque frente al arranque a plena tensión se alargan en 2,5 y 3,5 veces.En estos casos se especifican 10 arranques hora.
Arrancadores estáticos para modificaciones de sistemas
con motores de anillos
Hay experiencias de aplicar arrancadores suaves a los motores de anillos en
modificaciones y así se pueden desmontar las resistencias que han podidoestar causando problemas de mantenimiento. En estos casos hay que arran-car con una pequeña parte de la resistencia rotórica insertada y finalmentecortocircuitarla. Ciertos fabricantes de arrancadores citan esta aplicación;hay que tomarla con precaución como referencia para una instalaciónnueva. Como se indica al principio de este párrafo, sólo tiene sentido en larehabilitación de viejos sistemas que tenían un motor de anillos, no estricta-mente necesario, y que funcionaba mal, dando problemas de mantenimien-to. Sin embargo, hay que verificar si realmente el motor de anillos es
absolutamente necesario, como ocurre en el algunos casos de arranquesmuy duros, tal como se indica en la Tabla 10.1.
10.1.8. La mejora de la vida en los equipos graciasal arrancador estático
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 238/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUE 21 7
Los transportadores sin fin tienen engranajes. Las plataformas móviles
han de tener movimientos suaves al arrancar y al parar. Por ello en amboscasos es importante lograr arranque suave.En plantas trefiladoras, el arrancador estático evita roturas de cable. En
cintas transportadoras se evitan caídas del material.En los agitadores de fluidos viscosos un arranque suave puede evitar
roturas en los brazos agitadores o en la transmisión.También el arranque suave aumenta la vida útil del motor, ya que hay
una reducción de las sobretensiones y de los esfuerzos axiales en los bobina-dos del motor. El aparellaje de distribución puede bajar de calibre. Los
contactores aumentan de vida. Aplicando el arrancador estático a los moto-res de gran potencia, se puede reducir la punta de potencia contratada.Las menores puntas tienen efectos positivos sobre los equipos electróni-
cos y ordenadores conectados a la red.También en redes aisladas alimentadas mediante grupos de emergencia
se facilita el arranque de motores sobre el generador empleando arrancado-res estáticos. Véase a este respecto el Apartado 6.6.
10.2. RECAPITULACION DE LOS MODOS DE ARRANQUE Nos vamos a referir a los Capítulos 3 y 4, que es donde se han descrito condetalle, y recordaremos la clasificación que allí se dio.
10.2.1. Modos más frecuentes para cualquier tipode motor asíncrono
A continuación viene su enumeración, y tras ella indicaremos el número del
apartado en el que se ha descrito cada uno con amplitud:
Arranque directo (3.1.1).Arranque estrella-triángulo (3.1.5).Arranque con autotransformador (3.1.4).Arranque con resistencias en el estátor (3.1.2).Empleo del arrancador estático (4.1).Motor de rotar bobinado con resistencias en rotar (3.2.1).
Estos seis modos, por su mayor difusión, son los más convenientes enla mayoría de los casos; sus ventajas e inconvenientes se han sumarizadoen la Tabla 10.1.
10.2.2. Modos de arranque especiales
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 239/343
218 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Motor de rotar bobinado:
• Empleo de resistencia insertada a pulsos (4.3).
Motor de rotar en cortocircuito:
• Arranque con reactancias en el estátor (3.1.3).• Arranque con bobinado parcial (3.1.6).• Arranque mediante variación de frecuencia (4.2).• Empleo del motor de varias velocidades (3.1.7).• Arranque con motor auxiliar (3.1.8).• Arranque con bobinado partido (3.1.9).
Empleo de dispositivos en la transmisión mecánica:
• Arranque con acoplamiento centrífugo (3.3.1).• Arranque con acoplamiento hidráulico (3.3.2).• Arranque con acoplamiento electromagnético (3.3.3).
10.3. CUESTIO ARIO COMPLETO CO TODOS
LOS REQUISITOS PARA EL ESTUDIOCOMPLETO DEL ARRANQUE
En el Apartado 9.1 se dio la lista de las especificaciones para el estudio delarranque de una forma resumida. La que ahora presentamos es completa,salvo aspectos puntuales, y será necesaria su cumplimentación para loscasos muy especiales. Para los sencillos bastan pocos datos, que designare-mos marcándolos con un asterisco (*) en el cuestionario completo.
Indicamos que son insustituibles el buen criterio y los conocimientos de
la persona que recoge los datos de entrada.
10.3.1. Características ambientales
Tenemos que se han de consignar las siguientes:
- Temperatura ambiente (máxima, mínima, media).- Grado de humedad relativo (máximo, mínimo, medio).- Atmósfera explosiva y su clasificación.
- Altitud sobre el nivel del mar.Presencia de ciertos agentes, tales como polvo. ácidos. gases corrosi-vos, ambiente salino ...
10.3.2. Características de la alimentación
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 240/343
APLICACIONES Y SELECCIO DE LOS MODOS DE ARRANQUE 219
Diagrama unifilar con indicación del punto de conexión previsto
para el motor.Potencia de cortocircuito, indicando si es antes o después del trans-formador.
- Tensiones de los diversos escalones.Posibilidad de conectar el motor a tensiones más altas.Protecciones existentes con:
• Indicación de su función.• Niveles de ajuste (tensión/intensidad-tiempo).• Duración de las pausas de reenganche.
10.3.3. Líneas de alimentación eléctrica
En ocasiones, el motor va conectado a una línea de características determi-nadas; entonces son necesarios datos tales como:
- Línea aérea o subterránea.
- Longitud y dimensiones transversales para el cálculo de su impedan-cia, o valor de la impedancia calculada aparte.Intensidad máxima admisible en la línea.Descripción de otras cargas sobre la línea.Demandas horarias de potencia de las otras cargas:
• Potencia activa.• Potencia reactiva.• Sensibilidad de ciertas cargas a la caída de tensión.
10.3.4. Transformador de acoplamiento
Si existe uno o varios transformadores de acoplamiento entre la línea o punto de conexión y el motor cuyo arranque se estudia, hay que conocer para cada uno:
(*) Potencia aparente:
- Tensiones primaria y secundaria.- Si tienen tomas de ajuste de tensión y sus valores.
(*) Tensión de cortocircuito:
Pérrlirlas en el cobre.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 241/343
220 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
10.3.5. Datos complementarios de la planta
en la que se instala el motorRecomendamos conocer los siguientes:
- Otras demandas horarias de potencias activa y reactiva aparte de lasdel motor cuyo arranque se estudia.
- Baterías de condensadores de compensación existentes.- Tarifas a las que está acogida la planta en lo que se refiere a:
• Demanda máxima.• Existencia de sistemas de control de la demanda.
Perturbaciones sobre la tensión de alimentación.
10.3.6. Condiciones de la máquina accionada
Son las que se expresan a continuación:
(*) Tipo de máquina.(*) Potencia nominal absorbida.
Posibilidad de arranque en vacío.
(*) Par resistente inicial.
Curva de par resistente en función de la velocidad.
(*) Inercia indicando a qué velocidad está referida.(*) Ciclo de servicio, indicando el número de arranques por unidad de
tiempo.(*) Limitaciones en la aceleración.
Indicación si el par resistente es pulsatorio.
Rampa de aceleración permitida.En las aplicaciones de arranque a tensión reducida (arrancador está-tico, estrella-triángulo, otras) hay que indicar el máximo tiempo dearranque permitido.
10.3.7. Motor de acciona miento
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 242/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUE 221
(*) Inercia propia del motor:
- Para los motores de rotor bobinado se precisan:
(*) Tensi6n rot6rica.(*) Intensidad rot6rica.
10.4. METODO SIMPLE PARA ELEGIR EL MODO DE ARRANQUE
Es imposible sistematizar el método para elegir el modo de arranque en loscasos complejos; en estas situaciones la obtenci6n de buenos datos, tal comose ha dicho en el Apartado 10.3, es de importancia suma. Para casos sen-cillos, el método es mucho más simple, y lo vamos a indicar en la Figu-ra 10.1 en forma de árbol de decisiones. Primeramente ordenaremos los seismodos de arranque sencillos de acuerdo con sus prestaciones relativas deíndice de arranque y de intensidad de línea resultante:
Modo de arranqueMotor anillos con resistenciaDirectoCon autotransformador Estrella- triánguloArrancador estáticoResistencias estat6ricas
Indice de arranqueMejora el naturalMantiene el naturalMantiene el naturalMantiene el naturalPeor que el naturalPeor que el natural
IntensidadRegulableAltaBajaBajaControlableBaja
10.5. CALCULO SIMPLIFICADO DE LA CAlDADE TENSION
El Capítulo 6 se ha dedicado por completo al estudio de la caída de tensi6ny de las influencias de la red. Sin embargo, cuando se desea hacer una predeterminaci6n rápida del modo de arranque más adecuado es precisohacer una evaluaci6n de la caída de tensi6n; para ello haremos supuestosmás sencillos. Dentro de este apartado veremos tres ejemplos.
Ejemplo 10.1
Potencia de cortocircuito en punto de conexi6n Scc (MVA)Potencia del motor Pn (kW)Rendimiento

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 243/343
222 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
INICIO
Convertidor de
frecuencia
Arrancador estátiCXl. Contro
tensión
Arrancador
estático. Contra
aceleración
SI
Arranque estrela
triángulo. SOLO
BT
NO
SI
Arranque en vacío
con bajo par
Arranque estrella
triángulo. SOLO
BT
SI
ACXlplamiento
hídráulioo
ACXlplamlento
centrífugo
Bobinado
paraal o 2
velocidades
Convertidor de
frecuencia
Motor anillos el
resisten aa
Arranque con
autotransforma-
dar
Arrancador
estático. Control
intensidad
Resistencias de
estátor. Motores
grandes
REACTANCIAS

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 244/343
APLICACIONES Y SELECCIO DE LOS MODOS DE ARRA QUE 223
Potencia aparente nominal del motor S il
Caída de tensión en el punto de conexión!1U IU =Sil· (1,,1 II I) /S ee
576,49
11,53%
Si tenemos en cuenta que la impedancia del motor se añade a la impe-dancia equivalente de la red, el valor más preciso será:
!1UIU = Sil · (IaIIII)/[Scc + S,, · (I ,)I ,,)] 10,34%
El cálculo no considera la caída de tensión en el transformador. Da
valores conservadores por exceso.
Ejemplo 10.2
Ahora se tiene en cuenta al transformador de alimentación. Los datos soniguales a los del ejemplo anterior; el transformador tiene las característicassigu ien tes:
Potencia aparente S, (kV A)
Tensión de cortocircuito del transformador X re
2.000
6,00%
Emplearemos el método unitario del Capítulo 6. La base de reactanciaadoptada es la potencia de cortocircuito de la red.
Reactancia de red X R
Reactancia del transformador X,
Reactancia del motor en el arranque XIII
Caída de tensión en el punto de conexión
!1UIU = XRI(X R + X , + XIII)Caída de tensión en bornas del motor !1UIU = (X R + X,)/(X R + X , + XIII)
1 ,000,908,67
9,46%
17,97%
El par de arranque del motor se reduce al 67,29% de su valor dc ca-tálogo.
Ejemplo 10.3
Si desconocemos S c c o su valor es muy alto en relación al motor, red de potencia infinita, se tiene que:
Caída de tensión en el punto de conexión !1U IU
Caída de tensión en bornas del motor !1U IU = X,/(X, + XIII)
0,00%
9,40%
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 245/343
224 ARRANQUE IND STRIAL DE MOTORES ASINCRO OS
Los valores admisibles de la caída de tensión en la red están dados en laTabla 6.2 del Apartado 6.3.
Las caídas admisibles para las bornas de un motor, durante el arranque,son más altas que las aplicables a la red. En estas situaciones, el único efectoindeseable es la disminución del par motor, que puede imposibilitar que selogre el arranque.
Como los cálculos que acabamos de ver en los Ejemplos 10.1 Y 10.2 son pesimistas, y si limitamos el número de arranques a 3 por hora, podemosadmitir los valores siguientes:
Caída entre el 5 ~ 8%; en este caso vale el arranque directo si no haylimitaciones por la inercia arrastrada o en la aceleración.Si la caída de tensión calculada pasa al 9 ~ 12%, hay que prever:
• Arrancador estático.• Arranque estrella-triángulo.• Arranque con autotransformador.• Arranque con resistencias en serie con el estátor para regresar a
valores entre el 5 ~ 8%.
Si a pesar de todo no se retorna a estos valores, habrá que analizar los modos de arranque tales como:
Motor de rotar bobinado con resistencias en rotar.Arranque por variación de frecuencia. Antes de aplicar estas dosúltimas soluciones, hay que realizar un estudio detallado de caídas
de tensión, como se indica en el Capítulo 6.
Los cálculos hay que realizarlos con el menor valor posible de la poten-cia de cortocircuito Srr en el punto de conexión.
10.6. ESPECIFICACION DE LOS EQUIPOSDE ARRANQUE
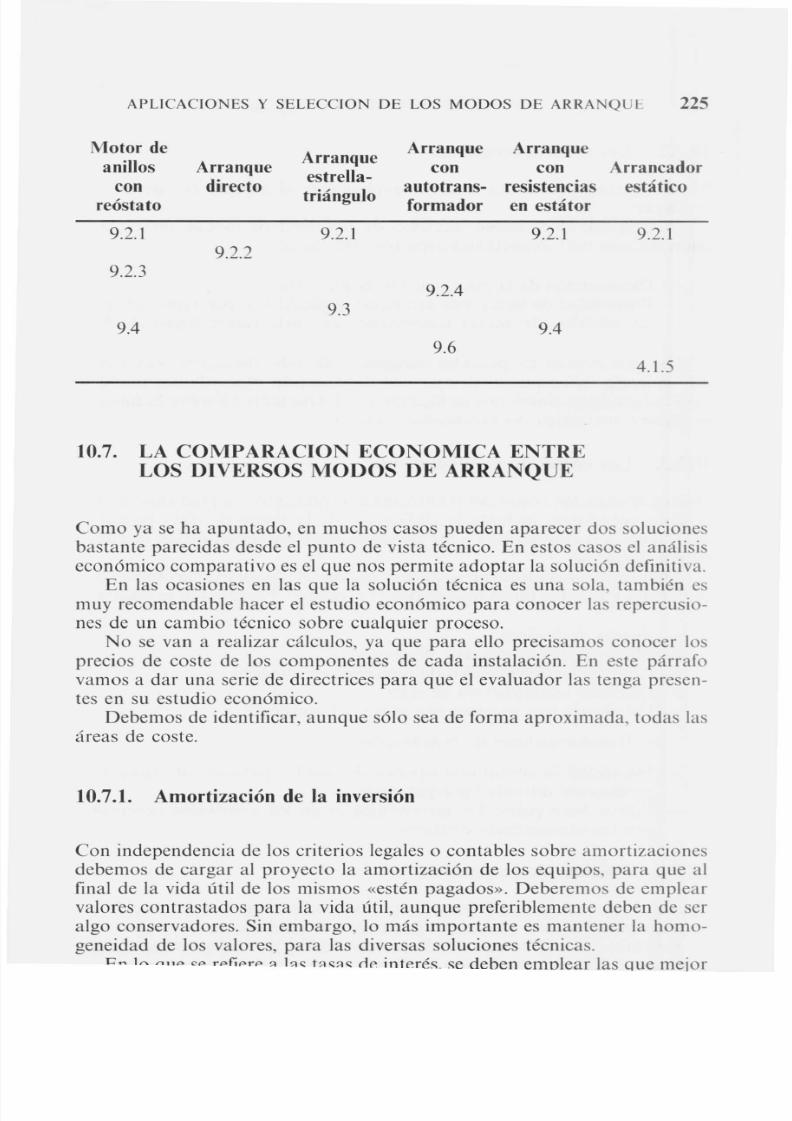
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 246/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUe 225
Motor deArranque
Arranque Arranque
anillos Arranque estrella- con con Arrancadorcon directotriángulo
autotrans- resistencias estáticoreóstato formador en estátor
9.2.1 9.2.1 9.2.1 9.2.19.2.2
9.2.39.2.4
9.39.4 9.4
9.64.1.5
10.7. LA COMPARACION ECONOMICA ENTRELOS DIVERSOS MODOS DE ARRANQUE
Como ya se ha apuntado, en muchos casos pueden aparecer dos soluciones bastante parecidas desde el punto de vista técnico. En estos casos el análisiseconómico comparativo es el que nos permite adoptar la solución definitiva.
En las ocasiones en las que la solución técnica es una sola, también esmuy recomendable hacer el estudio económico para conocer las repercusio-nes de un cambio técnico sobre cualquier proceso.
No se van a realizar cálculos, ya que para ello precisamos conocer los precios de coste de los componentes de cada instalación. En este párrafovamos a dar una serie de directrices para que el evaluador las tenga presen-tes en su estudio económico.
Debemos de identificar, aunque sólo sea de forma aproximada, todas lasáreas de coste.
10.7.1. Amortización de la inversión
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 247/343
226 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
10.7.2. Los costes energéticos
En el Apartado 5.4 se ha tratado ampliamente el aspecto energético delarranque.
En general, el consumo eléctrico de los diversos modos no es muydiferente, son más importantes aspectos tales como:
Disminución de la punta en kW contratada.Posibilidad de hacer más arranques y paradas y, por tanto, ahorrar las pérdidas del motor funcionando en vacío (véase Apartado 5.8).
Hay que evaluar las pérdidas energéticas de rodos los equipos cO/lsidera-
dos teniendo en cuenta su tiempo real de conexión. Recordamos tambiénaquí las consideraciones que se hicieron en el Apartado 5.6 sobre la funciónde ahorro energético del arrancador cstático.
10.7.3. Los costes de mantenimiento
Distinguiremos los costes del mantenimiento preventivo o predictivo de las
diversas soluciones, incluida la dedicación de la mano de obra propia ocontratada, los consumiblcs y los costes de reparación en función dc expe-riencias análogas.
Deberemos de considerar aspectos ligados al sistema de arranque o a problemas causados directamente por el arranque. Entre éstos se cuentan:
Fusión de fusibles.Mayor o menor desgaste de contactos.Coste de mantenimiento de repuestos en almacén.
Disparos intempestivos de relés.Fallos en otros equipos por causa del arranque:
• Transformadores de distribución.
Necesidad de contar con equipos duplicados para no interrumpir la producción durante las reparaciones.Filtros para paliar los inconvenientes de los armónicos generados
por los arrancadores estáticos.
10.7.4. Pérdidas de producción
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 248/343
APLICACIONES Y SELECCION DE LOS MODOS DE ARRANQUE 227
Lo más racional es no evaluar las pérdidas de producción directa, sinolos costes de:
- Tener equipos duplicados para evitar paradas.- Tiempo de sustitución del equipo averiado por el duplicado.
10.7.5. Costes generales
Se tendrán en cuenta diferentes aspectos, entre los que podemos señalar:
El distinto espacio requerido por las diversas soluciones.Los costes de instalación.
10.7.6. Evaluación de atributos varios
y para terminar, no se deben de olvidar los siguientes:
Necesidad de personal propio o contratado.Experiencia con equipos semejantes ya instalados.Funciones de protección, autodiagnóstico y registro de eventos que
ofrecen algunas alternativas frente a otras.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 249/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 250/343
CAPITULO
ONCEEVOLUCION DE LA TECNOLOGIA
y OBSERVACIONES FINALES
Con el presente capítulo se culmina este libro dedicado al análisis delarranque de motores eléctricos asíncronos. Creemos que los conocimientos
e indicaciones contenidas en él han de bastar para que el lector abordecualquier problema relacionado con este tema.
En el capítulo final vamos a especular sobre las tendencias de la tecnolo-gía en un futuro inmediato. Ya desde el comienzo del libro hemos visto queestamos ante un conjunto de tecnologías electrotécnicas maduras y en lasque no se esperan grandes acontecimientos tecnol6gicos.
El motor eléctrico es el componente más maduro y en él no se esperandesarrollos significativos. A pesar de todo, seguirá siendo el convertidor electromecánico por excelencia. Se están dando ligeras mejoras, tales como:
- Fabricabilidad y reducci6n de costes relativos, en competencia consuministros procedentes de países de economía emergente.
- Motores más sencillos, con menos componentes, y más reparables.- Introducci6n de las técnicas del control de calidad total para llegar
prácticamente a la meta de «cero defectos».
Repasaremos la evoluci6n tecnol6gica en los modos de arranque.
11.1. EVOLUCION EN LOS MODOS DE ARRANQUE
Esperamos que no caiga en desuso total ninguno de los modos analizados, pero sí irá variando el reparto de las aplicaciones de la forma siguiente:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 251/343
234 ARRANQUE 1 DUSTRIAL DE MOTORES ASI CRONOS
A partir de los 500 kW, los usuarios se deben de plantear la instalaciónde motores de Media Tensión (MT).
La normalización de estos arrancadores permitirá reducir su coste deforma importante, con lo cual se realimentará el proceso de extender su di-fusión y reducir aún más sus costes.
Media Tensión (MT)
Las tensiones normalizadas son 3...:..3,3 kV Y de 6...:..6,6 kV. Se fabricanalgunos motores asíncronos en la banda de tensiones de 10.. . : . . 13,8 kV, perosu número es tan bajo que normalmente no hay oferta de arrancadoresestáticos para este nivel de tensiones. En las aplicaciones de media tensiónhay que asociar tiristores en serie dentro del módulo de potencia.
Esta asociación, aunque resuelta ya, añade ciertas complejidades alarrancador y es una de las áreas en las cuales se espera evolución.
Usualmente el calibre máximo de los tiristores es de 800 A, que da lassiguientes potencias referidas a las dos tensiones usuales:
3.500 kW
7.000 kW
e n
e n
3.000 V
6.000 V
que cubren prácticamente todos los accionamientos de gran potencia conmotores asíncronos. Hemos de recordar que para estas potencias hay accio-namientos alternativos tales como:
Turbina de vapor para bombas en centrales térmicas.Motor síncrono para accionar bombas.Motor de corriente continua para trenes de laminación.
Motor asíncrono con convertidor de frecuencia en diversas variantes.
11.4.2. Evolución previsible en los tiristores
El tiristor y su capacidad de tensión e intensidad condicionan la capacidadde los arrancadores estáticos, no tanto en sus límites de potencia como enotras prestaciones. Para presentar la evolución, distinguiremos entre arran-cadores de baja y media tensión, y aquéllos están más evolucionados queéstos de media tensión.
Baja Tensión (BT)
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 252/343
EVOLUCIO DE LA TECNOLOGIA y OBSERVACIO ES FI ALES 235
Media Tensión (MT)
Tenemos aspectos, relacionados con la tensi6n de bloqueo y con el buenreparto de tensiones en el montaje en serie, tales como:
Disminuci6n de las intensidades de fugas.Mejora de la tensiones individuales de bloqueo.Logro de un reparto homogéneo de tensiones cuando los tiristoresestán asociados en serie. Para ello se adoptan:
• Resistencias de alto valor 6hmico, en paralelo con cada tiristor.
• Disposiciones para lograr que los calentamientos en las unionesdel semiconductor sean lo más semejantes posible para que nohaya dispersi6n de los valores de sus parámetros operacionales.
11.4.3. Evolución en las funciones de control
En el Apartado 4.1.4 se describieron las funciones de control para el arran-cador estático, y se vio que sus prestaciones no son muy especiales sinnecesidad de alta velocidad de respuesta.
Actualmente el control se realiza mediante algoritmos en microprocesa-dores, y por este lado no hay limitaci6n en la velocidad del control.
La transmisi6n de impulsos de encendido a los tiristores se hace en lamayor parte de los casos a través de transformadores de impulsos.
La evoluci6n del control se da principalmente en estas dos áreas:
- Incorporaci6n de algoritmos más sofisticados para añadir funcio-nes de:
• Autodiagn6stico.• Monitorizaci6n de variables operacionales .• Posibilidad de realizar control autoadaptativo a las características
del motor:
- Que varían de motor a motor.- Que cambian debido al calentamiento del mismo.
La incorporaci6n de funciones como las descritas no incrementangrandemente los costes, pero pueden ser muy interesantes para mejo-rar el servicio y mantenimiento del arrancador estático.Aplicar la transmisi6n de disparos de encendido a través de fibra6ptica. Este es un desarrollo que proviene de los rectificado res demuy alta tensi6n dedicados a transmisiones de potencia en tensi6ncontinua (HVDC).
La fibra 6ptica da ventajas muy interesantes, tales como:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 253/343
236 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
Realmente este desarrollo tiene mucho más sentido en arrancado res
de media tensión. Sin embargo, se puede pensar que su evoluciónhacia los menores costes hará que se pueda emplear también enarrancadores de baja tensión.
11.5. OBSERVACIONES FINALES
Hemos encontrado una tecnología madura con algunas evoluciones mo-destas que están ya enunciadas. Podemos decir que para ellas estamos en
la fase de perfeccionamiento y de ensanchamiento de las aplicaciones delarrancador estático.Se ha observado que en los arrancadores estáticos existe una amplia
oferta de marcas, sin grandes distingos en las prestaciones; es, pues, plausi- ble que las fuerzas del mercado hagan que la oferta se reduzca mejorandolos precios y unificando las características técnicas.
Es necesaria una oferta más tecnificada para arrancadores estáticos. Seve más necesaria a nivel de ayudas técnicas para que se pueda hacer unaselección rápida y segura por parte del usuario. También es conveniente
clarificar el modo de cálculo de los ahorros energéticos para esta función,que casi todos los ofertantes dan en sus catálogos.
La aplicación más amplia de arrancadores estáticos se ha de ver favore-cida por la incorporación de funciones tales como autodiagnóstico, protec-ción y registro de eventos.
El proceso de arranque en bastantes casos afecta negativamente a lavida del motor y, sobre todo, en casos tales como:
Motores medianos y grandes, críticos por el rotor.
Motores pequeños de baja tensión en servicio altamente repetitivo.
A pesar de que lo anterior es generalmente aceptado, son poco conoci-das estadísticas fiables sobre la correlación entre el servicio de arranquesrepetidos y la pérdida de vida útil. En consecuencia, sería muy interesantela difusión de este tipo de datos sacados de las experiencias prácticas y deensayos de homologación.
Otra de las líneas en las que deseamos hacer hincapié en estas conclu-siones es la monitorización de las caídas de tensión y su relación con el
aumento de la capacidad de las redes. De esta forma serán mejor conocidaslas posibilidades de arranque de motores asíncronos en los diversos lugaresde aquéllas.
Para los accionamientos grandes de máquinas complejas mecánicamenteserá conveniente la extensión de los estudios de simulación de transitorioselectromecánicos. De este modo se podrán evitar costosísimas averías, con
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 254/343
APENDICES
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 255/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 256/343
APENDICE
UNO
DESARROLLOS TEORICOSCOMPLEMENTARIOS
A.l.l. TE ORlA DEL MOTOR ASINCRONO
Se dan de forma resumida las ecuaciones generales del funcionamiento delmotor asíncrono. Se acude a la representación condensada de tensiones,flujos magnéticos y corrientes mediante fasores espaciales.
Se realizan ciertas simplificaciones, tales como:
- Los conductores son ideales, sus dimensiones son despreciables, por lo que no hacen falta ranuras en rotor yestátor.
- El rotor y estátor tienen bobinados trifásicos.- La Fuerza Magnetomotriz (FM M), que producen ambos bobinados,
se distribuye senoidalmente en su periferia.- Los bobinados se conectan en estrella.
El neutro es aislado, por lo que se cumple:
- El motor es bipolar.- La permeabilidad del entrehierro es netamente inferior a la de los
núcleos de estátor y rotor.
- No hay saturación magnética.- Las tensiones de alimentación tienen cualquier forma de onda.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 257/343
240 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
!:! .¡( t) = R ¡ . {¡ (t ) + L ¡ ·d { ¡j dl + L" , ·d ({2 ·e jE) d t
!:! '2( t) = R 2 ·{2(1) + L2 ·d {2 /d l + L " ,·d ({ ¡ ·e jE )/d t
J ·d n /d t =2/3·L ",· lm [{¡(t) ·({2(L )·e jE ( t ) ) * ] - C r (E , n, t)
n(t) = dE( t ) ¡d l
En el caso de los motores de rotar en cortocircuito, tenemos:
!:! .2(t) = O
Los símbolos literales son:
R ¡, R 2 : Resistencias óhmicas de fase en estátor y rotar.! : ! . ¡ (t) , !:!.2 (t) : F asores espaciales de tensión de rotar y está tor.{ ¡(t), {2 (t) : Fasores espaciales de corriente en rotar y estátor. L " , : lnductividad principal o común entre estátor y rotar.
L ¡ = (1 + (J ¡) L " , : Induetividad de estátor. L 2 =(1 + (J 2) L " , : Inductividad de rotar.(J ¡ :Coeficiente de dispersión o fugas de estátor.(J 2 : Coeficiente de dispersión o fugas de rotar.E ( t ) : Angula entre ejes de referencia de rotar y estátor.J : Inercia del rotar del motor y máquina acoplada.Cr (E , Q, t ) : Ecuación general del par resistente.Q(t) : Velocidad angular.
Como se ha demostrado por primera vez en las referencias (29) y (30), losfasores espaciales, tanto de tensión como de intensidad, son representacio-nes simbólicas en el plano complejo de las distribuciones espaciales dinámi-cas de ciertas magnitudes físicas internas existentes en la máquina. Lasmagnitudes internas están correlacionadas con las externas (tensiones, co-rrientes) a través de los teoremas de correlación fasorial (31). En particular,cuando son válidas las simplificaciones citadas al comienzo de este aparta-do, las corrientes en régimen transitorio de cada fase del estátor se obtienena partir del fasor espacial de corriente de está tal' mediante las relaciones:
i¡,,(I) = 2/3· Re [{ ¡U )]
i¡,(t) = 2 /3 ·Re[{¡( t ) ·e j2 rr3 ]i¡w( t )=2/3 .Re[{¡( l ) .e j2rr3]
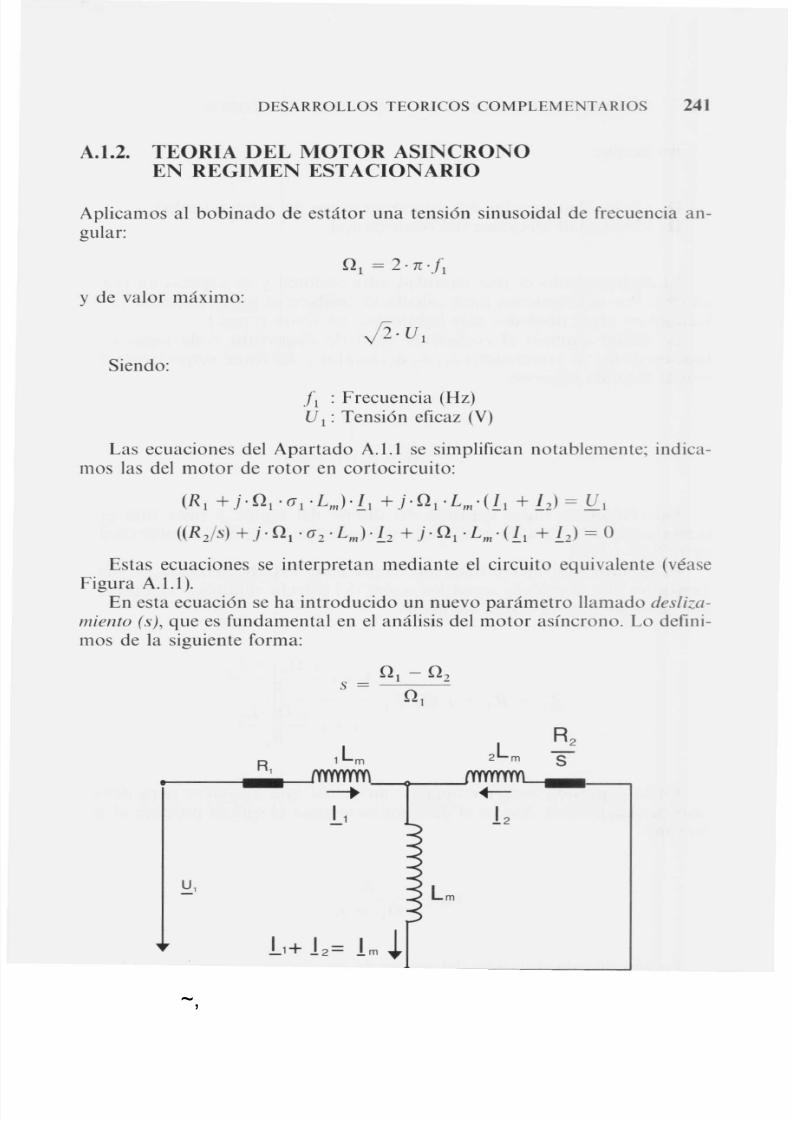
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 258/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 241
A.1.2. TEORIA DEL MOTOR ASINCRONO
EN REGIMEN ESTACIONARIO
Aplicamos al bobinado de estátor una tensión sinusoidal de frecuencia an-gular:
y de valor máximo:
Siendo:
fl : Frecuencia (Hz)V ¡:Tensión eficaz (V)
Las ecuaciones del Apartado A.U se simplifican notablemente; indica-mos las del motor de rotar en cortocircuito:
(R¡ + j .Q¡ '0'1 ·LIII)·L¡ + j .Q¡ ·LIII·(LI + Lz) = VI
((Rz/s) + j·Q¡·O'z·LIII)·Lz + j·Q¡·LIII·(Ll + Lz) =O
Estas ecuaciones se interpretan mediante el circuito equivalente (véaseFigura A.l.I).
En esta ecuación se ha introducido un nuevo parámetro llamado desliza-
miento (s), que es fundamental en el análisis del motor asíncrono. Lo defini-mos de la siguiente forma:
Q¡ - Qz
s =
0.1
2Lm
R 2
R , 1 Lm S
- - - . . -l1 L
~,

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 259/343
242 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
En la que:
ni : Velocidad angular del campo giratorio del estátor (rad/s).n 2 : Velocidad mecánica del rotor (rad/s).
El deslizamiento es una cantidad adimensional y se expresa en (pu) oen (%). Por consiguiente, para calcularlo también se puede expresar la ve-locidad en otras unidades más habituales, tal como (r.p.m.).
Se define también el coeficiente total de dispersión o de fugas (J
enfunción de los ya presentados (J l' (J 2 del estátor y del rotor, respectivamente,con la fórmula siguiente:
(J =
Este factor de fugas depende del diseño del motor y tiene una granimportancia a la hora de determinar sus características. Sus valores oscilanentre 0,05 y 0,20.
El circuito equivalente tiene una impedancia variable, función del desli-zamiento, que se calcula según las reglas del cálculo simbólico complejo, yque se expresa de la forma siguiente:
21
s·n¡·(J·L2+j----
R2
s·n l ·L21 +j ---
R2
En la expreSlOn anterior aparece un factor que nos sirve para definir otro parámetro útil, que es el deslizamiento para el que se produce el par máximo:
Sm:Í'<
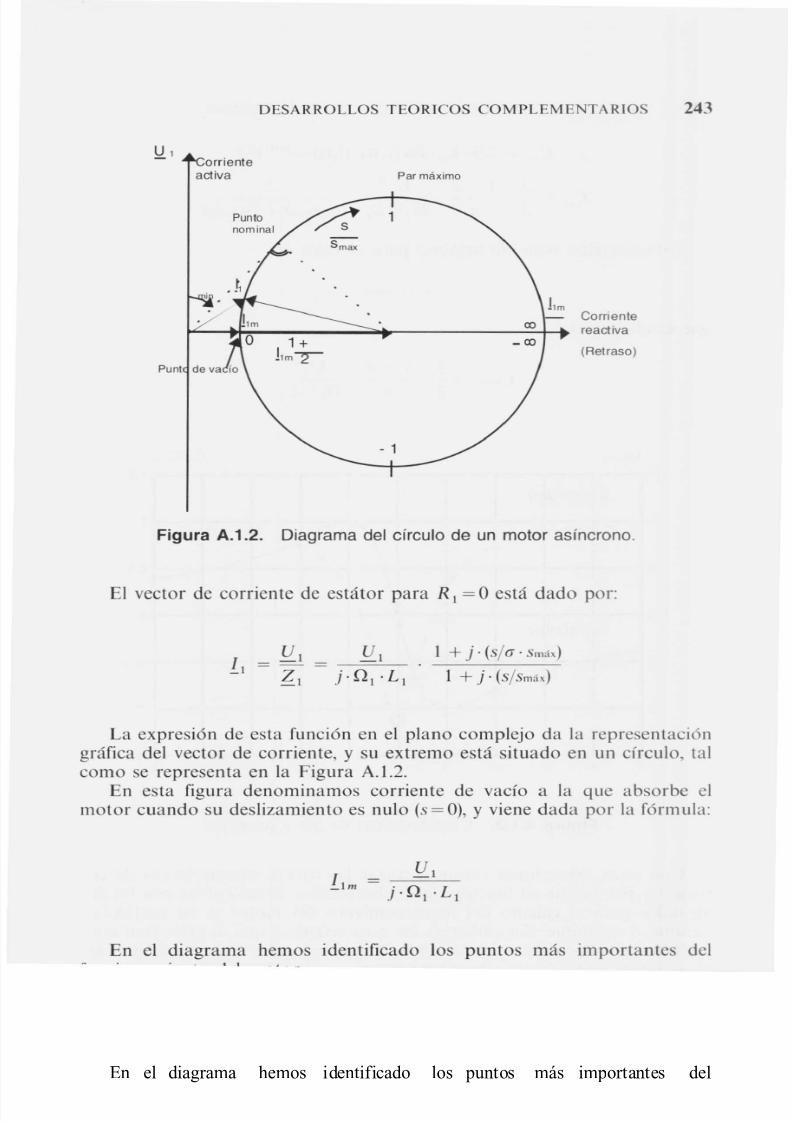
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 260/343
l J . lorriente
activa
DESARROLLOS TEORICOS COMPLEMENTARIOS 243
Par máximo
Punt
Corriente
reactiva
(Retraso)
Figura A.1.2. Diagrama del círculo de un motor asíncrono.
El vector de corriente de estátor para R 1 =O está dado por:
1 + j . (s/r¡· Smáx)
1 + j . (S / S m á x )
La expresión de esta función en el plano complejo da la representacióngráfica del vector de corriente, y su extremo está situado en un círculo, talcomo se representa en la Figura A.l.2.
En esta figura denominamos corriente de vacío a la que absorbe elmotor cuando su deslizamiento es nulo (s = O),Y viene dada por la fórmula:
En el diagrama hemos identificado los puntos más importantes del
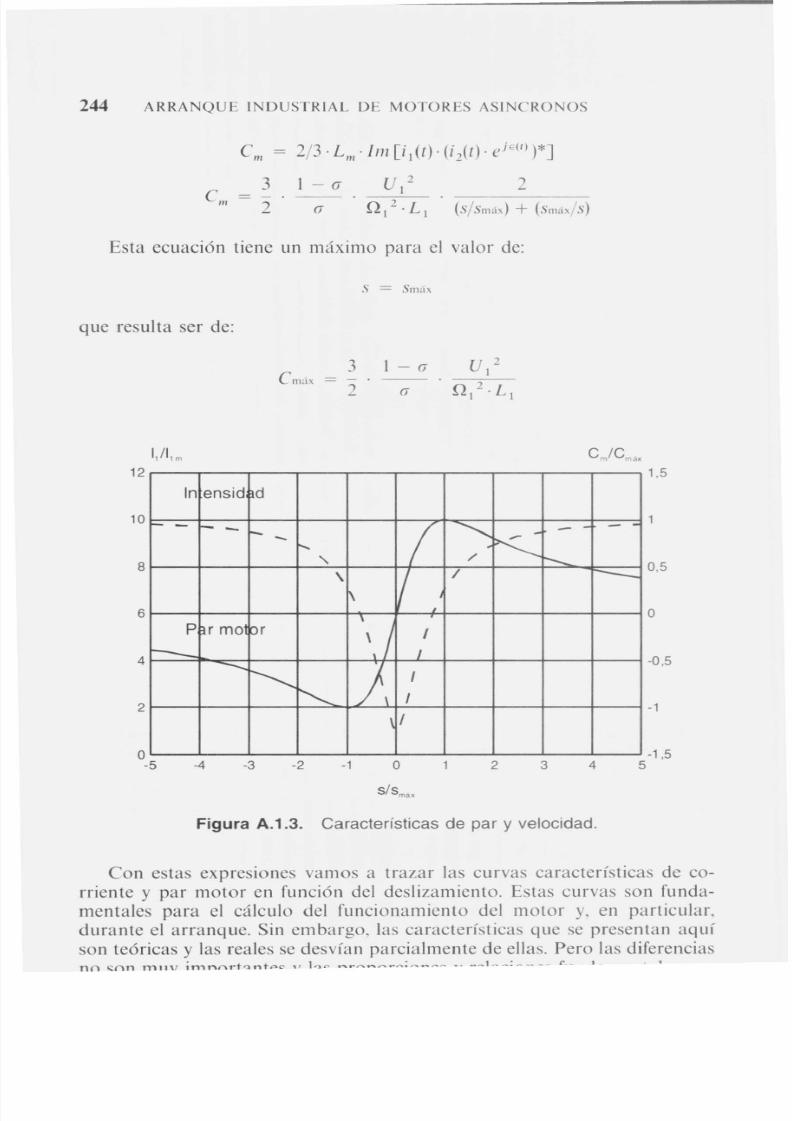
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 261/343
244 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
C '"
3
2
1-(J
(J
2
(S/S m ¡¡,) + (Sm ¡,,/S)
Esta ecuación tiene un máximo para el valor de:
s = Sm:ix
que resulta ser de:
Cmú\
3
2
1-(J
(J
In ensid d
- - -- (. • . . . . • . . • • -. . . . '--" - / - -\ /
I - -\
,
P r mo :>r
" / I- - I
- . . . . .- - . . . . . . . . . . . . .
), I
. . . . . • • . . . . . . I
I
10
8
6
4
2
o-5 -4 -3 -2 -1 o 2 3 4
1,5
0,5
o
-0,5
-1
-1,55
Figura A.1.3. Características de par y velocidad.
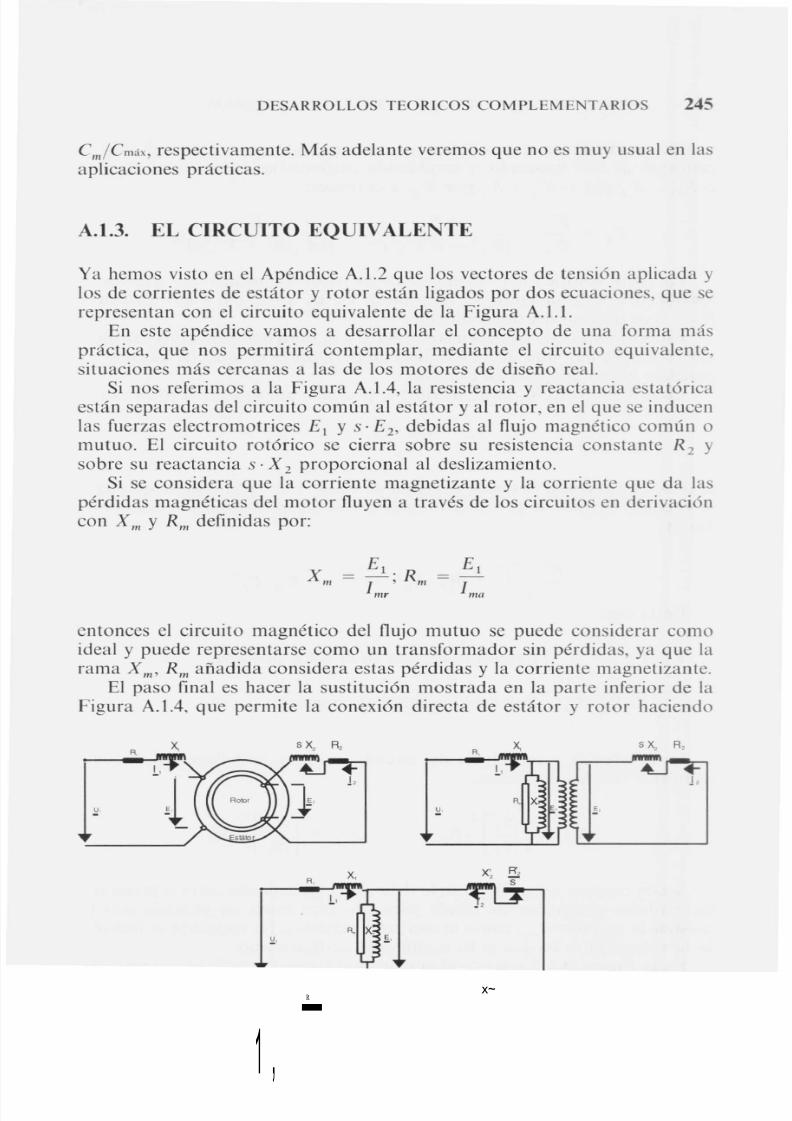
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 262/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 245
C",1Cm áx , respectivamente. Más adelante veremos que no es muy usual en las
aplicaciones prácticas.
A.l.3. EL CIRCUITO EQUIVALENTE
Ya hemos visto en el Apéndice A.1.2 que los vectores de tensión aplicada ylos de corrientes de estátor y rotor están ligados por dos ecuaciones, que serepresentan con el circuito equivalente de la Figura A.l.1.
En este apéndice vamos a desarrollar el concepto de una forma más
práctica, que nos permitirá contemplar, mediante el circuito equivalente,situaciones más cercanas a las de los motores de diseño real.
Si nos referimos a la Figura A.IA, la resistencia y reactancia estatóricaestán separadas del circuito común al estátor y al rotor, en el que se inducenlas fuerzas electromotrices E I Y s· E2 , debidas al flujo magnético común omutuo. El circuito rotórico se cierra sobre su resistencia constante R2 ysobre su reactancia s· X 2 proporcional al deslizamiento.
Si se considera que la corriente magnetizan te y la corriente que da las pérdidas magnéticas del motor fluyen a través de los circuitos en derivación
con XIII y R III definidas por:
XIII
El¡;RIII
mr
entonces el circuito magnético del flujo mutuo se puede considerar comoideal y puede representarse como un transformador sin pérdidas, ya que larama XIII' R
III añadida considera estas pérdidas y la corriente magnetizante.
El paso final es hacer la sustitución mostrada en la parte inferior de laFigura A.lA, que permite la conexión directa de estátor y rotor haciendo
s X, R,R.
sX, R,
1 l ·
-A ,
R x~
1 ,-

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 263/343
246 ARRA QUE I DUSTRIAL DE MOTORES ASINCRO OS
uso de un circuito rotórico ficticio equivalente, tal como se ha indicado al
principio de este apartado, y cambiando entonces las magnitudes E' 2 por s·E I , s·X 2 por S·X'2 Y R2 por R'2' y entonces:
E'l' __ 2
2 - Z'2
s· El
(R'/ + S2 X'/)I ~
El[(R' o S)2 + X' o 2 ) J I 2- -
La rama rotórica del circuito tiene la tensión aplicada El' que no esfunción del deslizamiento. Su reactancia X' 2 es constante y su resistenciaR' d < ; si es función del deslizamiento.
Este circuito es de una gran comodidad a la hora de realizar los cálculos.Sin embargo, hay una diferencia muy importante a la hora de calcular la
potencia activa disipada en el rotar.En la Figura A.IA (parte inferior) la potencia por fase en el rotar es de:
s
es decir, l /s veces la potencia disipada en calor. Esto quiere decir que aquíse cuenta, además, la potencia transformada electromecánicamente por elmotor:
( 1 - s )R 2' . l' / + -_.- R' o • l' o 1
S --
En la que:
Potencia disipada en el rotar por fase.
(1 - s) R ' 2 . l' 2 2 : Potencia mecánica P", por fase.s
La resistencia y reactancia del circuito rotórico se reducen al circuitoestatórico con las relaciones:
[ N J l R 'o = _1 .R o
- N 2 - [ N J lX') = _1 .Xo
- N 2 -
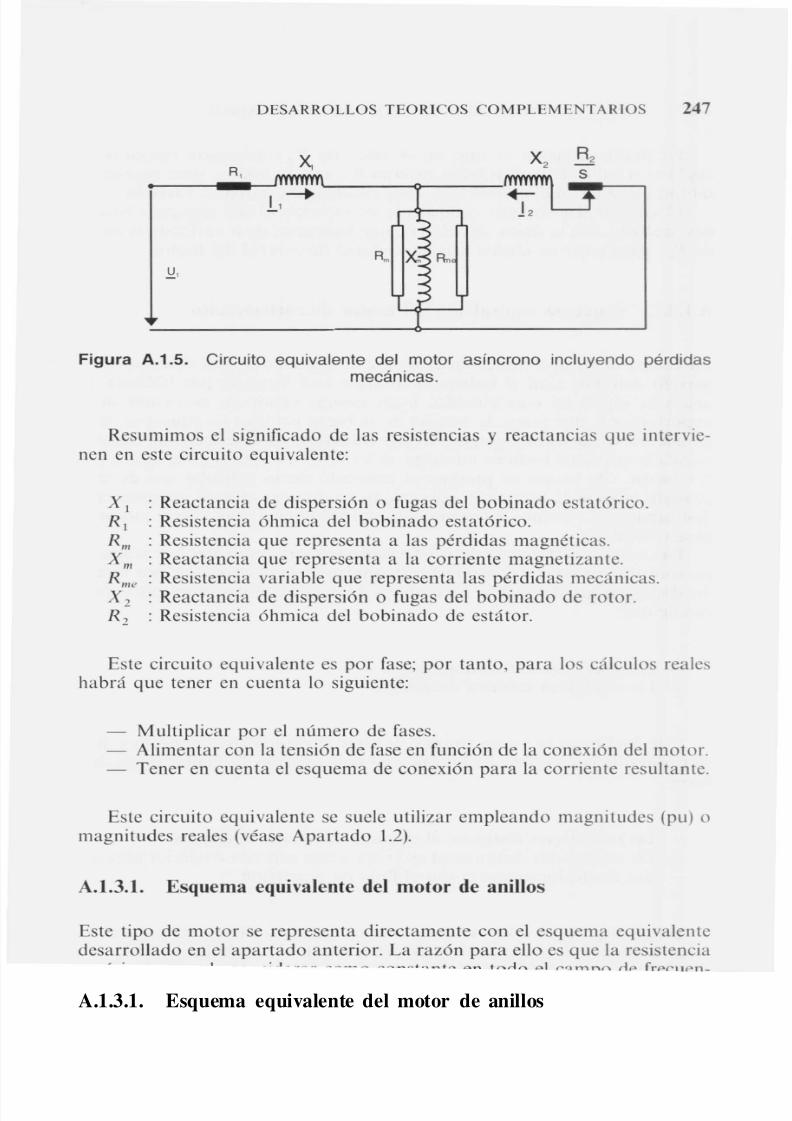
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 264/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 247
R,
Figura A.1.5. Circuito equivalente del motor asíncrono incluyendo pérdidasmecánicas.
Resumimos el significado de las resistencias y reactancias que intervie-nen en este circuito equivalente:
XI: Reactancia de dispersi6n o fugas del bobinado estat6rico.R I :Resistencia óhmica del bobinado estatórico.R ", : Resistencia que representa a las pérdidas magnéticas.X", : Reactancia que representa a la corriente magnetizan te. R " ,e : Resistencia variable que representa las pérdidas mecánicas. X 2 : Reactancia de dispersión o fugas del bobinado de rotor.R2 : Resistencia 6hmica del bobinado de estátor.
Este circuito equivalente es por fase; por tanto, para los cálculos realeshabrá que tener en cuenta lo siguiente:
Multiplicar por el número de fases.Alimentar con la tensi6n de fase en funci6n de la conexi6n del motor.Tener en cuenta el esquema de conexión para la corriente resultante.
Este circuito equivalente se suele utilizar empleando magnitudes (pu) omagnitudes reales (véase Apartado 1.2).
A.1.3.1. Esquema equivalente del motor de anillos

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 265/343
248 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La única variación es que, en el valor de R2 (resistencia rotórica) se
engloba el valor de la resistencia externa R e , ! que se inserta, para regular elmotor, entre los anillos rotóricos. Esta resistencia externa es variable.
El cálculo del circuito equivalente es idéntico al del esquema básicodesarrollado, con la única salvedad de que habremos de ir variando el valor de RC\! para tener en cuenta esta posibilidad de control del motor.
A.I.3.2. Esquema equivalente del motor de cortocircuito
En contra de lo que sucede en el motor de rotor bobinado descrito en el párrafo anterior, aquí el bobinado rotórico está formado por bobinas deuna sola espira en cortocircuito. Estas espiras conducen corrientes muyimportantes y, por tanto, la sección de la barra rotórica (o espira) es muygrande. Al ser la sección grande, el nujo transversal o de dispersión, cuandocircula la corriente rotórica en carga, es variable a lo largo de la altura delconductor, con lo que se produce el conocido efecto pelicular que es másacusado cuando la frecuencia del circuito rotórico es alta. (Regímenes con
deslizamientos cercanos a la unidad o al 100%; por tanto, con el motor a baja velocidad.)La consecuencia directa de este fenómeno es que la resistencia y reactan-
cia rotóricas ya no son constantes y dependen de la frecuencia y, por tanto,del deslizamiento del motor. Esto quiere decir que con deslizamientos altossucede que:
La resistencia rotórica aumenta.
La rcactancia rotórica disminuye.
Este fenómeno es así en rotores de ranuras profundas y también existeen rotores de jaula doble, en los que, por construcción, las jaulas se puedenhacer:
De resistencias distintas: al emplear materiales diferentes.
De reactancias distintas: al estar las jaulas superior e inferior abraza-das de distinta manera por el nujo de dispersión.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 266/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 249
R ,
Figura A.1.6. Circuito equivalente del motor de ranuras profundas.
R, x,
~e
S
Figura A.1.7. Circuito equivalente del motor de doble jaula.
A.1.4. EL DIAGRAMA DEL CIRCULO
En el Apéndice A.1.2 se vio que el lugar geométrico de la corriente delestátor es un círculo. También vimos la posición de los puntos de vacío, par máximo, deslizamiento infinito.
El diagrama del círculo que allí se vio es teórico, y es la base demodificaciones para obtener un diagrama del círculo que es adecuado pararepresentar motores que no tengan el efecto de ranuras profundas ni sean dedoble jaula. Es válido para representar motores de rotor bobinado o moto-res de jaula sencilla, cuyas ranuras sean poco profundas.
En la Figura A.I.8 aparece el diagrama del círculo modificado, aplicable
a los casos citados arriba.Este diagrama se traza conociendo las corrientes obtenidas de los en-
sayos de vacío y cortocircuito (a rotor parado), y valen para determinar elcírculo, ya que además su centro está sobre el eje de abscisas.
Sin embargo, hoy en día el diagrama del círculo tiene menos uso que en~I ~~n~,..I" "., n,,,, pnt{)nrf'<:: f'vit::th::J los eOl:wrrosos cálculos del circuito

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 267/343
250 ARRANQUE 1 DUSTRIAL DE MOTORES ASINCRONOS
ooEal
"O
' "eo
N
o- g(¡ ;ealOl
al"O
' "eoN
Figura A.1.8. Diagrama del círculo práctico.
Su empleo puede ser de utilidad para representar las propiedades gene-
rales del motor y sus tendencias.
A.1.5. EL BALANCE DE FLUJO ENERGETICOSIMPLIFICADO
Hemos visto en el Apéndice A.I.3 una primera interpretaci6n de las poten-cias en el motor asíncrono.
A la potencia allí designada como:
R'2 .{ ' /3·---
s
la denominamos potencia electromagnética, y es la potencia que pasa por interacci6n electromagnética entre el estátor y el rotar a través del entrehie-rro. Como se cumplía la ecuaci6n:
3 .
En la que:
s 3·R2'·{'22 + 3 ( 1 - s ) R' 2 . {' /s
3 . R' 2'{' / Potencia disipada en el rotar.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 268/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 251
Podemos establecer que:
Pot. electromagnética Pérdidas en el rotor + Pot. mecánica
Viendo que la potencia electromagnética Pe", se divide en dos partes:
Pérdidas en el rotor P pr% ~~
Potencia mecánica PIllo
Se deducen, además, las siguientes relaciones a través del deslizamiento:
P pro/ = P em . S
El par mecánico bruto en el eje, sin deducir las pérdidas mecánicas delmotor, está dado por:
P " ,C " , = n
~¿N
P e " ,· ( 1 - s)
°o·(I-s)
Pe", CQ= el}1
o
Viéndose que es idéntico al par electromagnético transmitido por elcampo magnético.
A.l.6. EL CALENTAMIENTO DE CONDUCTORESEN REGIMEN ADIABATICO
Es el caso especial del calentamiento en el que no se considera la disipaciónal medio refrigerador.
En motores eléctricos, y para los regímenes de arranque con altas co-rrientes, éstas están limitadas mucho más por las reactancias que por lasresistencias; en consecuencia, el aumento de la resistencia por calentamientono condiciona demasiado la disminución de corriente. Por tanto, este estu-dio se hace para corriente constante.
El conductor tiene las características siguientes:
J : Intensidad que atraviesa el conductor (A).7 T . : Resistividad del conductor (ohmios· m).e : Calor específico del conductor (J/kg· 0C).
¿ ) : Densidad del conductor (kg/m3).
, - 1 --_..: •.. . ....1 .....1• ..• .1 ,.. • ...• .• ..• •r l • • ,...tAr (m\

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 269/343
252 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Potencia eléctrica por efecto Joule degenerada en calor
P p = /2. R = J 2 . n . I s [W]
Energía desarrollada en un instante de tiempo dI
Energía almacenada adiabáticamente en la masa del conductor
Siendo d O el incremento de temperatura en ese período; como ambasexpresiones de la energía son iguales, resulta la velocidad de calentamiento:
dO/dI = d2. n/(c· 6) [O C s]
Vamos a dar las características de los materiales conductores más em- pleados en motores eléctricos:
Material
Resistividad (Ohm· m)Variación con temp (pu)Densidad (kg/m3
)
Calor específ. (JrC· kg)Temperatura fusión Cc)
Cobre 20°C
17,24.10 9
0,00438.830385,181.090
Aluminio 99,5% 20 °C
28.10 9
0,00402.700921,09658
Si introducimos los valores de la tabla, las velocidades de calentamien-to son:
Para el cobre:Para el aluminio:
dO/dr = 5,07.10-15. d2
dO/dI = 11,30·1O-15·d2
Si las densidades de corriente se expresan en las unidades más habitualesde (A/mm2
), estas fórmulas cambian a:
Para el cobre:Para el aluminio:
dO /t/t = 5,07.10-3. d 2
da dt = 11,30· 10 3. d 2
La variación de la resistividad del metal en función de la temperaturadel conductor se debe de tener en cuenta en algunos casos cuando loscalentamientos son importantes. Sabemos que se cumple:
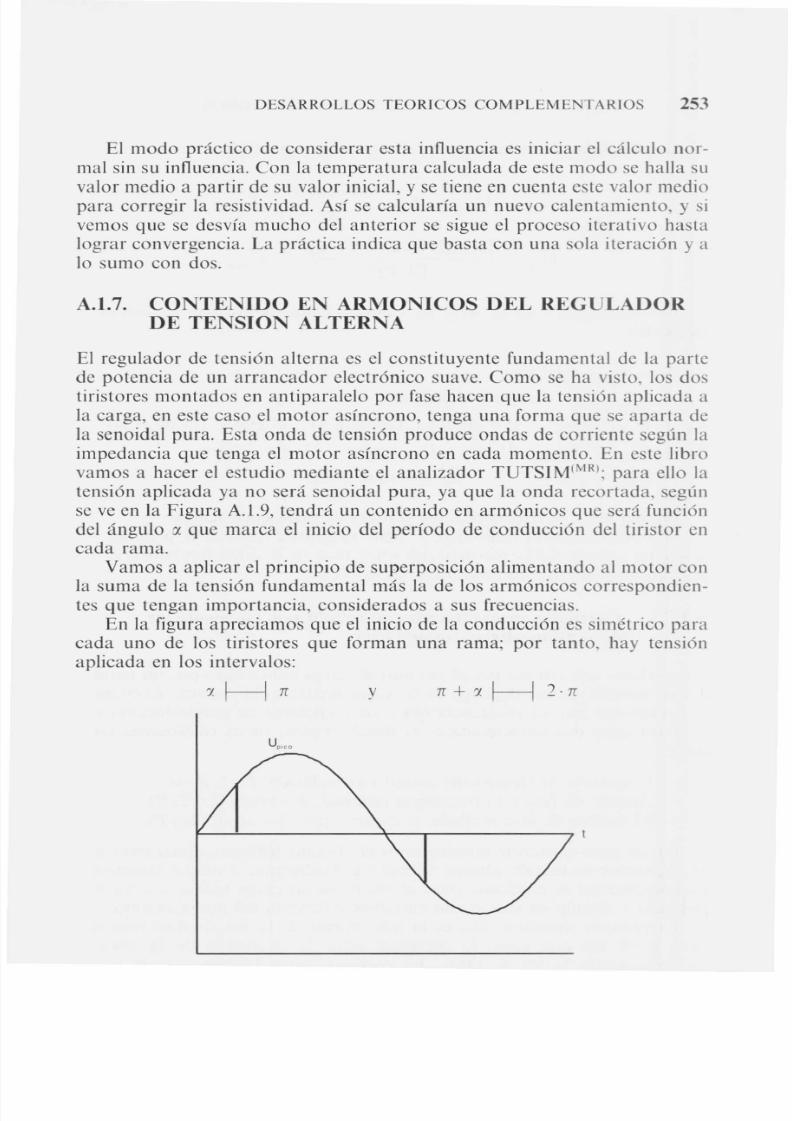
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 270/343
DESARROLLOS TEORICOS COMPLEME TARIOS 253
El modo práctico de considerar esta influencia es iniciar el cálculo nor-
mal sin su influencia. Con la temperatura calculada de este modo se halla suvalor medio a partir de su valor inicial, y se tiene en cuenta este valor medio para corregir la resistividad. Así se calcularía un nuevo calentamiento, y sivemos que se desvía mucho del anterior se sigue el proceso iterativo hastalograr convergencia. La práctica indica que basta con una sola iteración yalo sumo con dos.
A.1.7. CONTENIDO EN ARMONICOS DEL REGULADORDE TENSION ALTERNA
El regulador de tensión alterna es el constituyente fundamental de la partede potencia de un arrancador electrónico suave. Como se ha visto, los dostiristores montados en antiparalelo por fase hacen que la tensión aplicada ala carga, en este caso el motor asíncrono, tenga una forma que se aparta dela senoidal pura. Esta onda de tensión produce ondas de corriente según laimpedancia que tenga el motor asíncrono en cada momento. En este librovamos a hacer el estudio mediante el analizador TUTSIM(MR); para ello latensión aplicada ya no será senoidal pura, ya que la onda recortada, según
se ve en la Figura A.1.9, tendrá un contenido en armónicos que será funcióndel ángulo rJ.que marca el inicio del período de conducción del tiristor encada rama.
Vamos a aplicar el principio de superposición alimentando al motor conla suma de la tensión fundamental más la de los armónicos correspondien-tes que tengan importancia, considerados a sus frecuencias.
En la figura apreciamos que el inicio de la conducción es simétrico paracada uno de los tiristores que forman una rama; por tanto, hay tensiónaplicada en los intervalos:
y 7[+ 'l. H2·7[

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 271/343
254 ARRANQUE 1 DUSTRIAL DE MOTORES ASINCRONOS
Las fórmulas de la tensión, en el regulador monofásico, son:
V",ed = Vpico
+ cos ' : 1 .
n
[se n (2· ': 1 .) /2 + n - ':I.J 1/2
Ve! = [2.nJI2 . V pico
Los coeficientes de la serie de Fourier están dados por las fórmulassiguientes:
Al - V pico' sen2 ': I. /n
81 V pico' [n - a + sen a· cos aJ/n
A", V pico' [2 /( 1 1 1 2- 1) + cos (m + 1) ' : I . /(m + 1) - cos (1 1 1 - 1) ' :1.{m - l )J/n
8", V pico' [sen (m + 1)a/(m + 1) - sen (1 1 1 - 1) ' :1 . /(1 1 1 - I )]/n
C'" [A,/ + B,/J 12 c P ' " = atan (B",/ A,J
En la Figura A.I.IO vienen las gráficas de estos coeficientes.Se observa que el armónico 9
0
tiene magnitud que, en el peor de loscasos, no supera el 8% respecto del valor pico de la onda fundamental. Alcalcular se despreciarán armónicos superiores.
A.1.7.l. Corriente en el circuito controlado por un reguladorde tensión alterna monofásico
La corriente que circula por el circuito de carga controlado por un regula-
dor de tensión alterna depende de las características del circuito. El circuitose caracteriza por su resistencia (R) y su coeficiente de autoinducción (L).
Para estas dos características es usual emplear otros coeficientes talescomo:
Constante de tiempo del circuito monofásico: T= L/ R (s).
Angulo de fase a la frecuencia nominal: c P = artan (2nj'L/ R).
El ángulo de fase también se expresa por: c P = artan (2nIT).
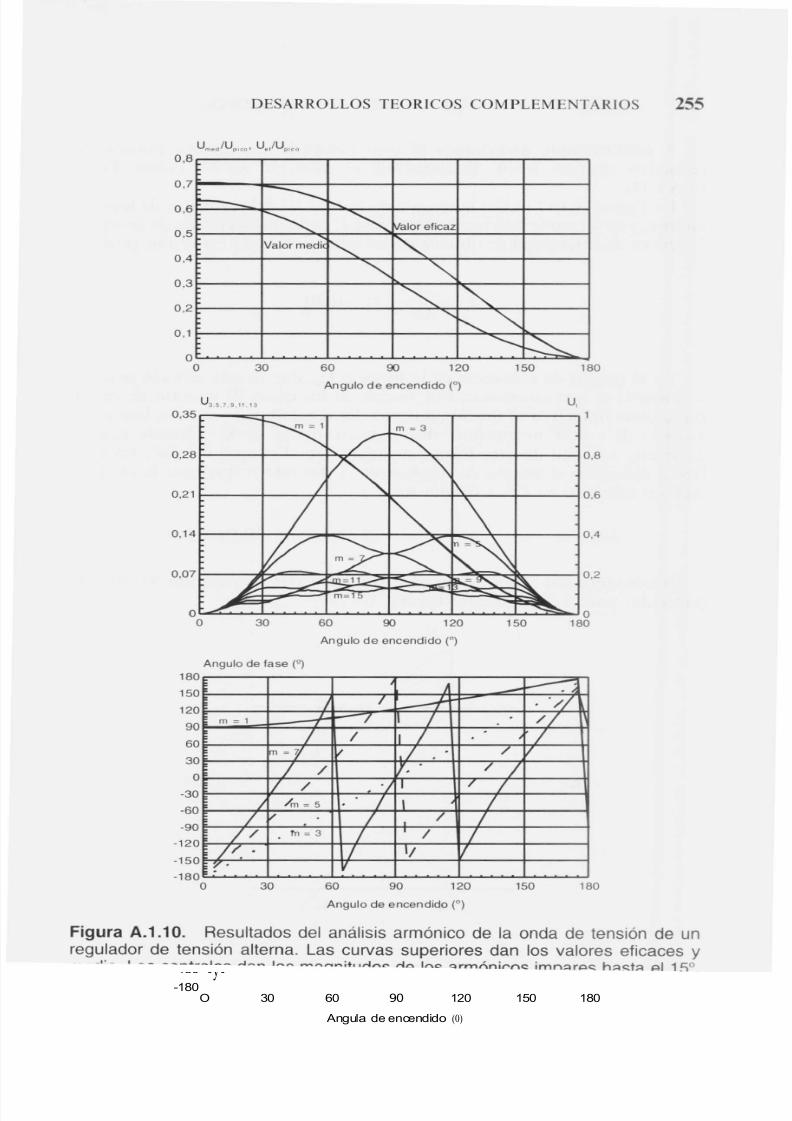
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 272/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 255
Um"d/Up,cO' U,,/Up,eo
0,8
0,2
0,6
0,8
0,4
u,
150
Angula de encendido (0)
oO
0,7
0,6
0,5
0,4
0,3
0,2
0,1
OO 30
U3.5.7,91113
0,35
0,28
0,21
0,14
0,07
Angula de encendido (0)
---:I ---r - .//m _ 1 - ' - 1--7 / //
/ / / 7m=7j / 7
/ / / /
/ / '/ I / /
/m = 5 / I // / . / /
// In = 3 / .
/ /// . / 1/ I
-y -
Angula de fase (2)
180
150120
90
60
30
O
-30
-60
-90
-120
-150
-180O 30 60 90 120 150 180
Angula de encendido (0)

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 273/343
256 ARRA QUE INDUSTRIAL DE MOTORl-S ASINCRO lOS
A continuación, analizamos cl caso contrario dc circuito puramente
inductivo cuando R = O. Presentamos el caso de :x= 90° (véase Figu-ra A.I.I!).
La Figura A.J.ll indica la tensión en bornas V e del regulador de tensiónalterna, y en su parte inferior la intensidad le en la misma escala de tiempos.La curva de intensidad se obtiene de la aplicación de la expresión general:
1, = ~L f Ve' t i (Qr)
En el campo de existencia de la función V c' que es una senoide parcial,su integral es una cosenoide. Por lo que en los casos de circuito de carga puramente inductivo el funcionamiento del regulador de tensión hasta losángulos de 7. = 90° no produce disminución alguna de la corriente que loatraviesa, o, dicho de otra forma, no regula en el campo 0° - 90°. En estafigura definimos el <lngulo de conducción Ó , durantc el que pasa la intensi-dad; en este caso su valor resulta ser:
Ó /2 = n -:x ; ( 5 = 2· (n - IX ) = 2· (180° - 90°) = 180°
A continuación representamos la situación para un ángulo :x> 90°, en particular rara :x= 130° (véase Figura A.1.12).
u
= 1800
.~ ..
.~ ~ ... ..
7; ~~~.. / ../ ..
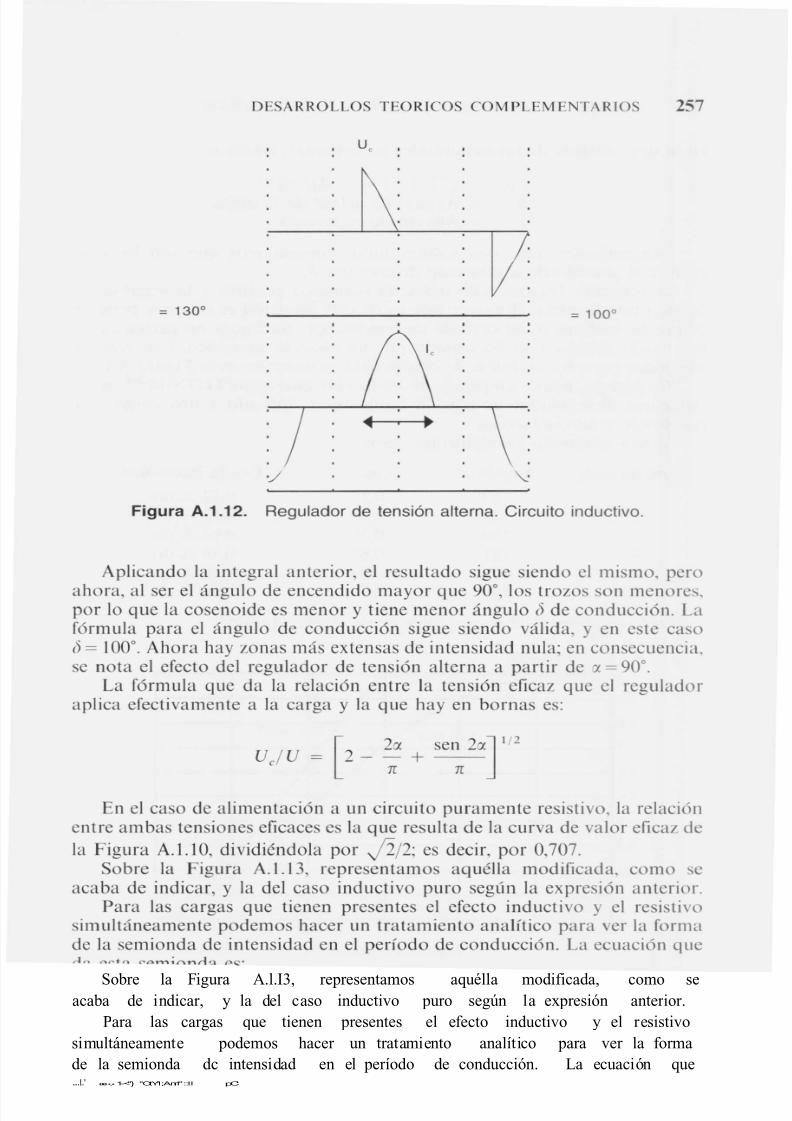
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 274/343
= 130°
DESARROLLOS TEORICOS COMPLEMENTARIOS 257
= 100°
\...
Figura A.1.12. Regulador de tensión alterna. Circuito inductivo.
Aplicando la integral anterior, el resultado sigue siendo el mismo, peroahora, al ser el ángulo de encendido mayor que 90°, los trozos son menores, por lo que la cosenoide es menor y tiene menor ángulo b de conducción. Lafórmula para el ángulo de conducción sigue siendo válida, y en este caso
b = 100°. Ahora hay zonas más extensas de intensidad nula; en consecuencia,se nota el efecto del regulador de tensión alterna a partir de :x =90°.
La fórmula que da la relación entre la tensión eficaz que el regulador aplica efectivamente a la carga y la que hay en bornas es:
[2 IX sen 2 IX ] 1/2
Uc/U = 2 - - + --n n
En el caso de alimentación a un circuito puramente resistivo, la relaciónentre ambas tensiones eficaces es la que resulta de la curva de valor eficaz de
la Figura A.l.IO, dividiéndola por J2 /2 ; es decir, por 0,707.
Sobre la Figura A.l.I3, representamos aquélla modificada, como seacaba de indicar, y la del caso inductivo puro según la expresión anterior.
Para las cargas que tienen presentes el efecto inductivo y el resistivosimultáneamente podemos hacer un tratamiento analítico para ver la formade la semionda dc intensidad en el período de conducción. La ecuación que. . . . 1 ." 00 •.• 1-<"} "OtY'l;Anrl"::ll pC'
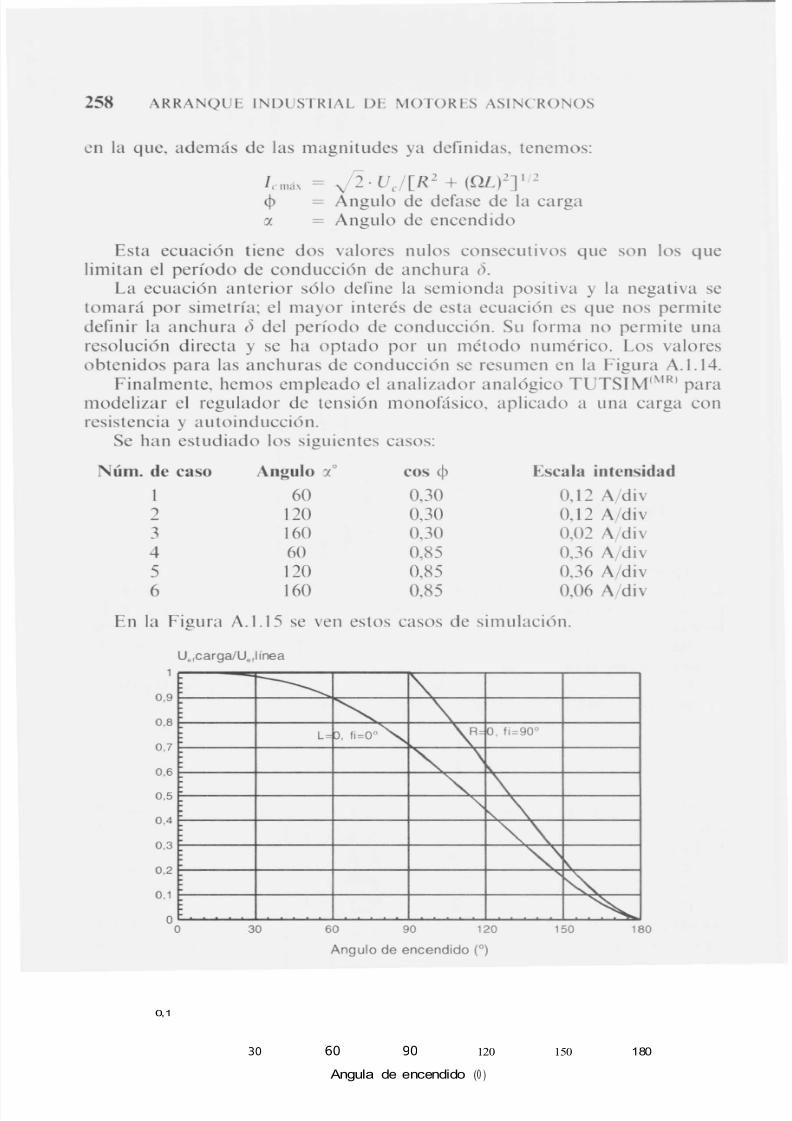
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 275/343
258 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
en la que, además de las magnitudes ya definidas, tenemos:
l'lll<íx j2. Uc l [R 2 + (QLf] 1 2
< p Angula de defase de la carga(X Angula de encendido
Esta ecuación tiene dos valores nulos consecutivos que son los quelimitan el período de conducción de anchura ó.
La ecuación anterior sólo define la semionda positiva y la negativa setomará por simetría; el mayor interés de esta ecuación es que nos permitedefinir la anchura () del período de conducción. Su forma no permite una
resolución directa y se ha optado por un método numérico. Los valoresobtenidos para las anchuras de conducción se resumen en la Figura A.1.14.
Finalmente, hemos empleado el analizador analógico TUTS] M(MRI paramodelizar el regulador de tensión monofásico, aplicado a una carga conresistencia y autoinducción.
Se han estudiado los siguientes casos:
Núm. de caso Angulo e J .0 cos < p Escala intensidad
1 60 0,30 0,12 A¡div
2 120 0,30 0,12 A/div3 160 0,30 0,02 A div4 60 0,85 0,36 A/div5 120 0,85 0,36 A/div6 160 0,85 0,06 A div
En la Figura A.l.15 se ven estos casos de simulación.
U"cargalU"línea
0,1
30 60 90 120 150 180
Angula de encendido (0 )
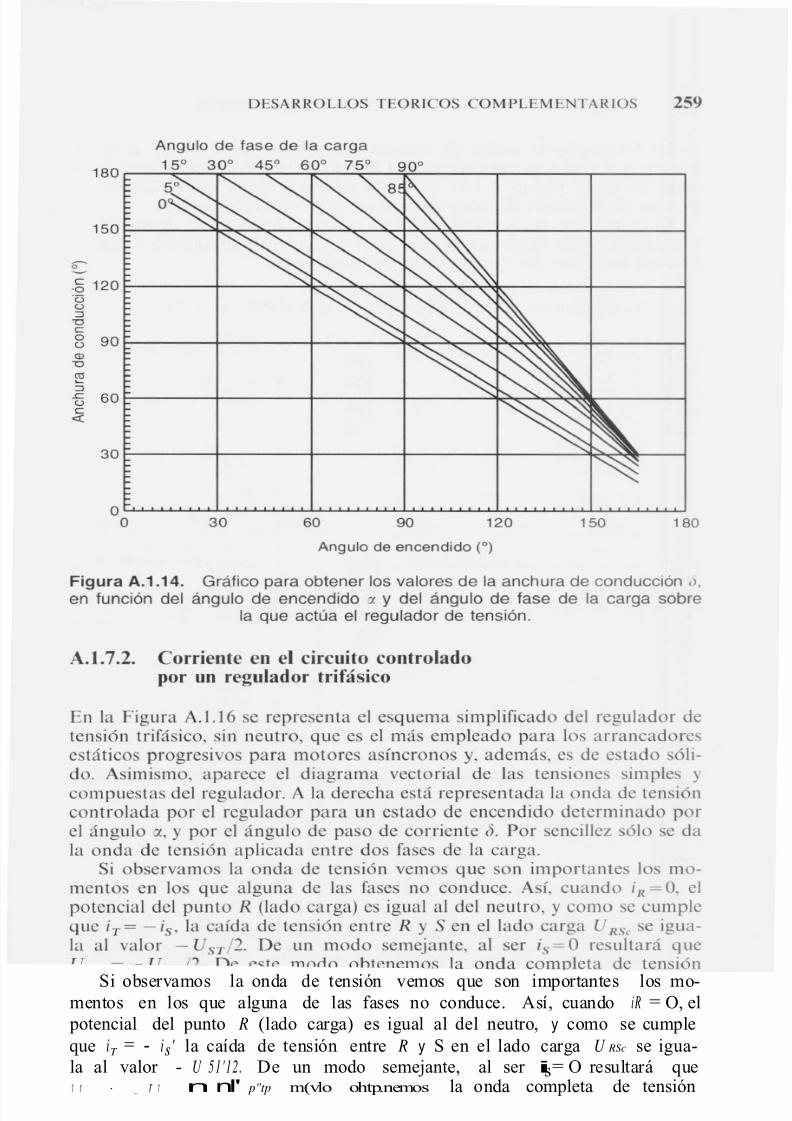
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 276/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 259
180
150
,6 120'0
ü:: J
<:le
8 90Q)
<:l
~:: J
-§ 60e«
30
o O 30 60 90 120 150 180
Angula de encendido (0 )
Figura A.1.14. Gráfico para obtener los valores de la anchura de conducción á,
en función del ángulo de encendido IX y del ángulo de fase de la carga sobrela que actúa el regulador de tensión.
A.1.7.2. Corriente en el circuito controladopor un regulador trifásico
En la Figura A.I.16 se representa el esquema simplificado del regulador detensión trifásico, sin neutro, que es el más empleado para los arrancadoresestáticos progresivos para motores asíncronos y, además, es de estado sóli-do. Asimismo, aparece el diagrama vectorial de las tensiones simples y
compuestas del regulador. A la derecha está representada la onda de tensióncontrolada por el regulador para un estado de encendido determinado por el ángulo e x , y por el ángulo de paso de corriente (j. Por sencillez sólo se dala onda de tensión aplicada entre dos fases de la carga.
Si observamos la onda de tensión vemos que son importantes los mo-mentos en los que alguna de las fases no conduce. Así, cuando iR = O, el potencial del punto R (lado carga) es igual al del neutro, y como se cumpleque iT = - is' la caída de tensión entre R y S en el lado carga U RSc se igua-la al valor - U 51'12. De un modo semejante, al ser is= O resultará queT r - _ r T n nI' p"tp m(vlo ohtp.nemos la onda completa de tensión

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 277/343
260 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
La forma de las ondas de tensión aplicada depende de los paráme-
tras 'Y .
y ¿ ) , el cual a su vez depende del ángulo de fase de la impedancia de lacarga < p . En la Figura A.I.l7 se da un gráfico con los valores de las re-laciones de tensiones de primer armónico para estos parámetros.
El motor asíncrono trifásico es una carga de impedancia de módulo y
fase variables que dependen fundamentalmente del deslizamiento s. En losmotores normales, los valores extremos están entre:
Arranque (s = 1), cos < p : : : : 0,2,Funcionamiento nominal (s :::: O ). 0.9.
¡,'
.lr.-12B", cosf.-8.3833. f_5l1Hz _-r-----r ..----.,--~ i
/ '"
IP L O Y I [.'leEN
T1 1 .8 8 8 1 1 8 8 r---8.11B lhI8
PLon VOL
~ " 8 8 8 1 1 88888811
P L O n O H O C O R
~ . : : : ~ : r -P l u T ~
:l tllhl~!l[ 1
J 8111l~8[1
( ,I \
L I I
PLon
1 : : : - 188888118 ¡988888
noyz . V O LillBlIBIIBII8l tB l I
1
P Lo n: O H DC O R
!.1 I1 1 1 1 1 1 1 l2.88888
P L O Y " ,'JillliltlllE 1l .B l II I B II E 1
b .1 I1 1 1 1 1 1 8E Z
f..I l1 IB 8 1 1 E -2
! !
T I M E
---_ ...,.Ir, 168·. c~trl-B.8'HI. ~ se HI I
J'._., ~ ' , , - - Ji
j 1
jll,!I881l88
e l , ~ ~ ~ ' ' ' . .' ' ' ' l , ." 1 1r ) t\l, / \ J ) ~ 1 1
I
~ ~ ' "/ ~ / ~ " J ;1
__ 18.888888 __ ---'-'"-'
noTt EHWt8888888B .B B B IIB
non: V O Lo t . 88B 88
B .IlB B IIIIP LOT J: OHOCOR
b,88BBB2 , 118888
PLon IZ ,7 I1 B llB' J ,BBBBIlEl
-,~--n OT ! E II CE "
811811888
1
1 1 , 8 8 8 8 8
PLOTZ.IJOLot l lB 1 I88
81181188non 0110(0.
b,B llll llB2,8881 1 1 1
PLon Io t Sl II l8 8 E I
I ¡ ,S 1 l8 8 1 1E I
L ] Ifl 81lB l IBE2~
(', lIBlllllJE-Z
L~
,Ir, ,,,', ,",r~,~ I
T I 1 " \[
,1 ,, 1,
¡B1I88111lB
i r1 1 - - -
I l-1
/ "
( ,
PLon [tlCtl!
8 . 8 1 l 8 8 8 88, l I8B l I l I
PLon: VOL
« 1 1 8 8 1 1 88.88888
P Lo n- O H DC O R
" , 8 1 1 8 8 8288888
PLuT1 j
I S lI I ll ll lE 1
S,888l!IlEZ
PL~C[ItI~ --
: m : : ' I l - '_ I r _ ' - " - " - ' ~ , , _ , r _ '_ ~ ~ " _ " _ " _ ~ _ '5 _ ' _ " 1
1
' I¡ non: V O L
: : : : : : ' \ . J I \ " ' - .T ¡ ¡ : : l " C O R ,W ~/f' - '\./ .ÓPLon I
I ~::::: , I
1 [ - j Ir / r/ ),
L.~jI1 8 ,8 1 1 8 8 1 1 8 T IM E & 81 11 18 8[21 , 1 8 1 1 1 1 1 1 1 1 8 8 T IM E b ,8B B l l l lE-2
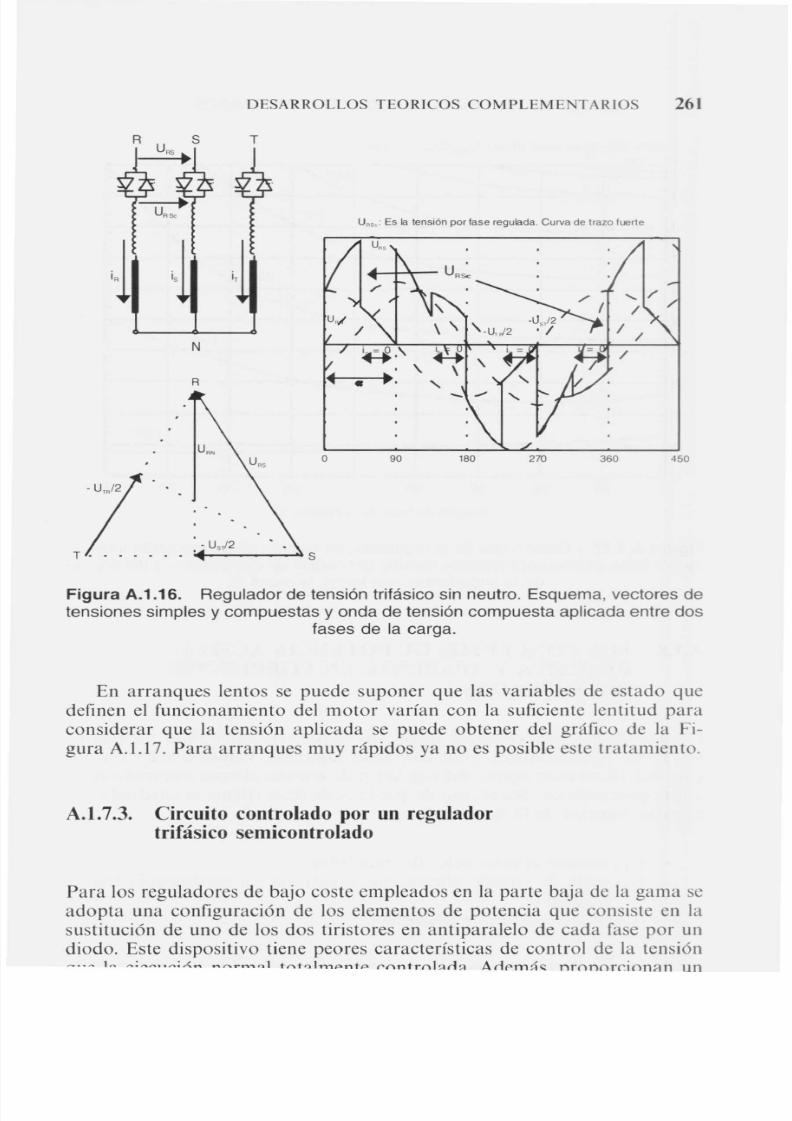
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 278/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 261
T
URSC: Es la tensión por fase regulada. Curva de trazo fuerte
450360270180
UA~~'
'\ . /' I
·Ll,,/2\ \ \.U,,/2 . /
W\
90o
s
N
R
,7Figura A.1.16. Regulador de tensión trifásico sin neutro. Esquema, vectores detensiones simples y compuestas y onda de tensión compuesta aplicada entre dos
fases de la carga.
En arranques lentos se puede suponer que las variables de estado quedefinen el funcionamiento del motor varían con la suficiente lentitud paraconsiderar que la tensión aplicada se puede obtener del gráfico de la Fi-gura A.1.1? Para arranques muy rápidos ya no es posible este tratamiento.
A.1.7.3. Circuito controlado por un reguladortrifásico semicontrolado
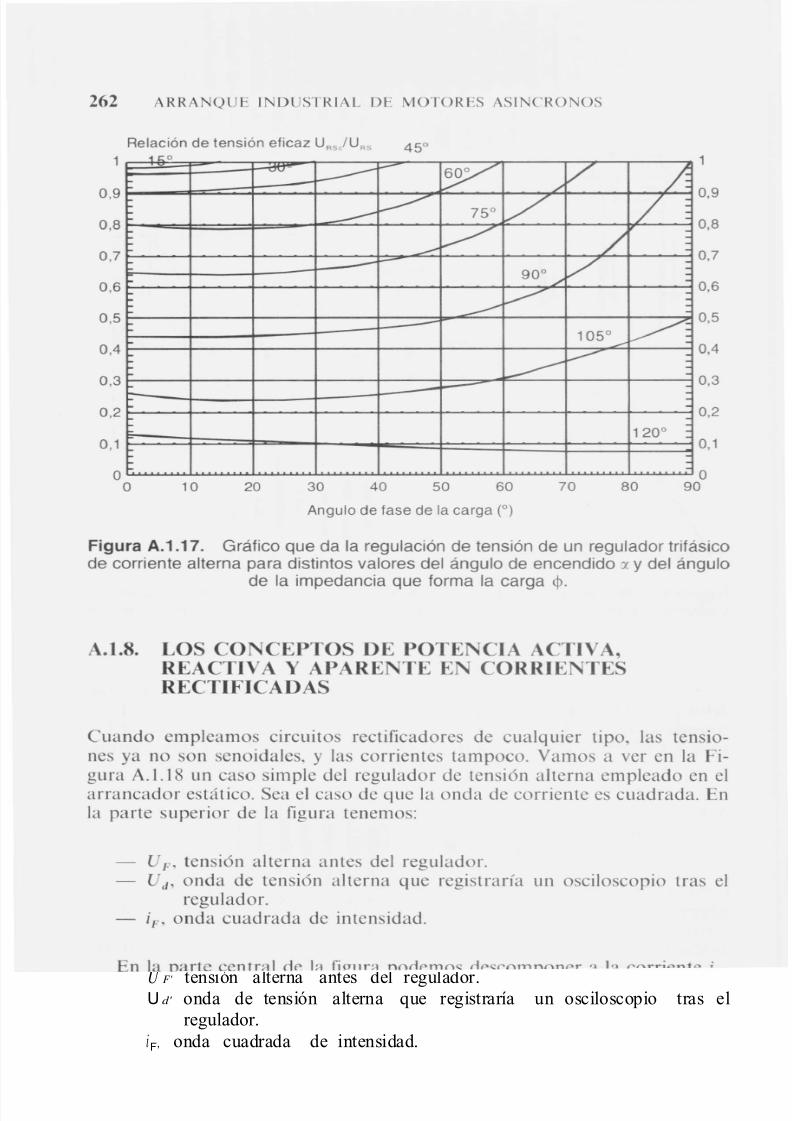
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 279/343
262 ARRANQUE INDUSTRIAL DE MOTORES AS[NCRONOS
Relación de tensión eficaz U RS/U RS
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
• eo
- - - - ~ / I/
- - ~ 75° / /
- - ~ /- ,/90° /
- - - - ~
- l--/105°
- - - - - - - - -- - -120°
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
° ° 10 20 30 40 50 60 70 80 °90
Angula de fase de la carga (0 )
Figura A.1.17. Gráfico que da la regulación de tensión de un regulador trifásico
de corriente alterna para distintos valores del ángulo de encendido :xy del ángulo
de la impedancia que forma la carga c P .
A.1.8. LOS CONCEPTOS DE POTE CIA ACTIVA,REACTIVA y APARENTE EN CORRIENTES
RECTIFI CAD AS
Cuando empleamos circuitos rectificadores de cualquier tipo, las tensio-nes ya no son senoidales. y las corrientes tampoco. Vamos a ver en la Fi-gura A.l.18 un caso simple del regulador de tensión alterna empleado en elarrancador estático. Sea el caso de que la onda de corriente es cuadrada. Enla parte superior de la figura tenemos:
U F' tensión alterna antes del regulador.U d' onda de tensión alterna que registraría un osciloscopio tras el
regulador.iF, onda cuadrada de intensidad.
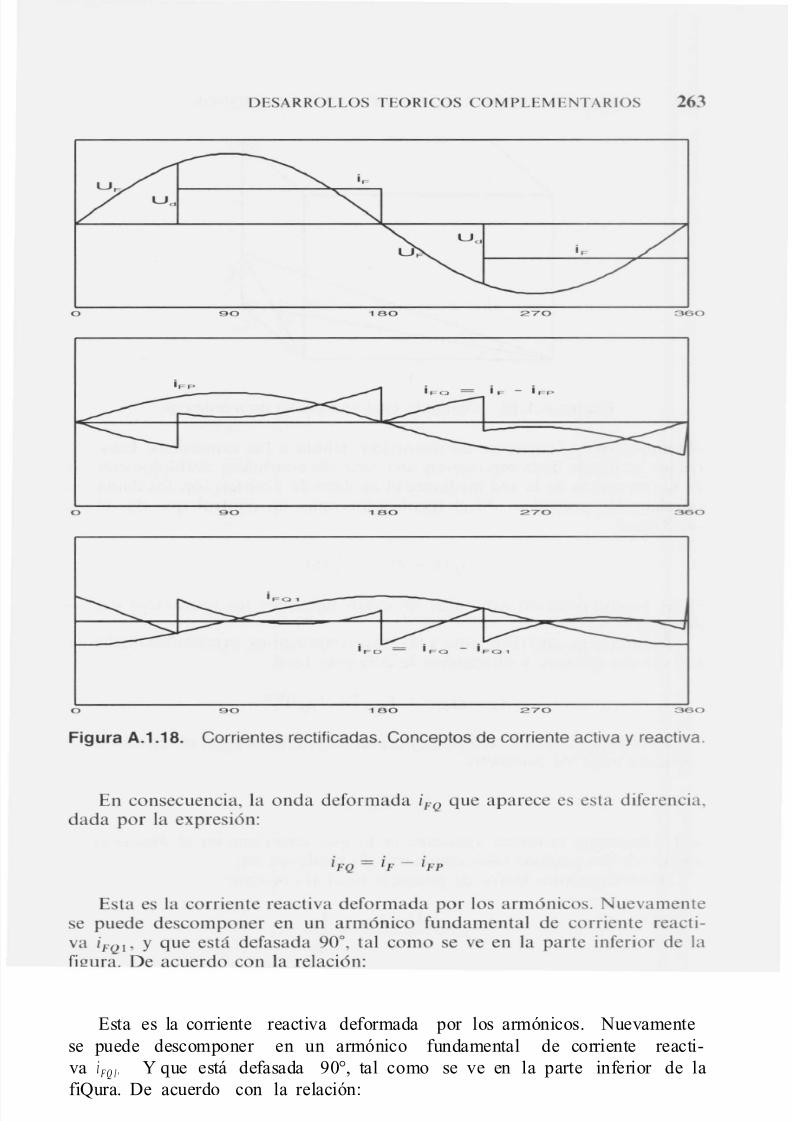
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 280/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 263
o 90 180 270 360
o 90 180
iF - iFP
270 360
o 90 180 270 360
Figura A.1.18. Corrientes rectificadas. Conceptos de corriente activa y reactiva.
En consecuencia, la onda deformada i FQ que aparece es esta diferencia,dada por la expresión:
Esta es la corriente reactiva deformada por los armónicos. Nuevamentese puede descomponer en un armónico fundamental de corriente reacti-va iFQ 1 , Y que está defasada 90°, tal como se ve en la parte inferior de lafiQura. De acuerdo con la relación:

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 281/343
264 ARRANQl iI' INDlISTRIi\L DE MOTORES ASINCRONOS
Figura A.1.19. Corriente total en el caso de armónicos.
obtendremos iFD corriente de distorsión debida a los armónicos. Esta co-rriente se puede descomponer en una serie de armónicos múltiplos enterosde la frecuencia de la red mediante el análisis de Fourier, son los llamadossimplemente armónicos. Si el rectificador tiene un control que da ondassimétricas:
en la descomposición armónica no están presentes los armónicos de or-den par.
Sumamos geométricamente a las tres componentes, expresadas mediantesus valores eficaces, y obtenemos la corriente total:
En la Figura A.l.19 vemos la interpretación gráfica de la obtención de lacorriente total. Al producto:
se le denomina potencia aparente, es la que interviene en el dimensiona-
miento de los equipos tales como transformadores, etc.Denominaremos factor de potencia total al cociente:
(JU F ·f FP
S

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 282/343
DESARROLLOS TEORICOS COMPLEMENTARIOS 265
Se le puede representar como el producto:
(J = J1. cos < p 1
En esta fórmula tenemos que:
y se le denomina contenido de armónicos en la onda fundamental.El factor de potencia del armónico fundamental está dado por la expre-
sión que sigue:
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 283/343
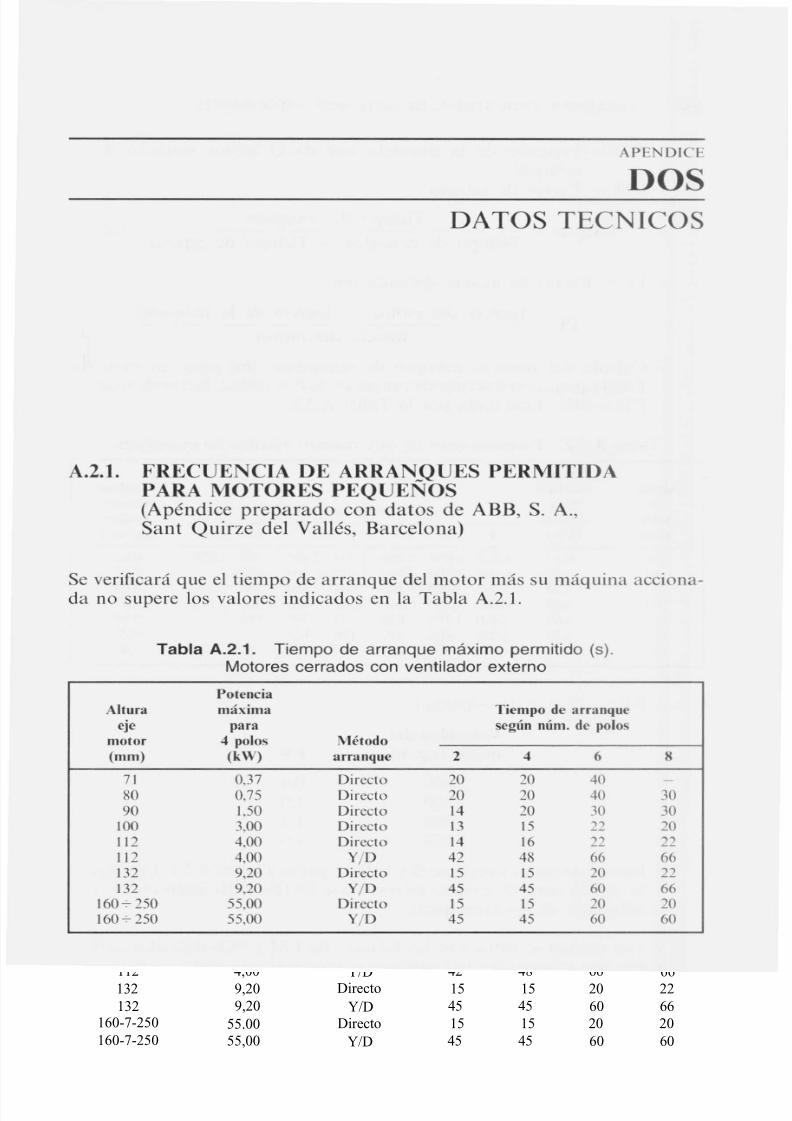
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 284/343
APENDICE
DOSDATOS TECNICOS
A.2.1. FRECUENCIA DE ARRAN_QUES PERMITIDAPARA MOTORES PEQUENOS
(Apéndice preparado con datos de ABB, S. A.,Sant Quirze del Vallés, Barcelona)
Se verificará que el tiempo de arranque del motor más su máquina acciona-da no supere los valores indicados en la Tabla A.2.t.
Tabla A.2.1. Tiempo de arranque máximo permitido (s).
Motores cerrados con ventilador externo
PotenciaAltura máxima Tiempo de arranque
eje para según núm. de polosmotor 4 polos Método(m m) (kW) arranque 2 4 6 8
71 0,37 Directo 20 20 40 -
80 0,75 Directo 20 20 40 3090 1,50 Directo 14 20 30 30
100 3,00 Directo 13 15 22 20112 4,00 Directo 14 16 22 22
112 4,00 Y/D 42 48 66 66132 9,20 Directo 15 15 20 22132 9,20 Y/D 45 45 60 66
160-7-250 55.00 Directo 15 15 20 20160-7-250 55,00 Y/D 45 45 60 60
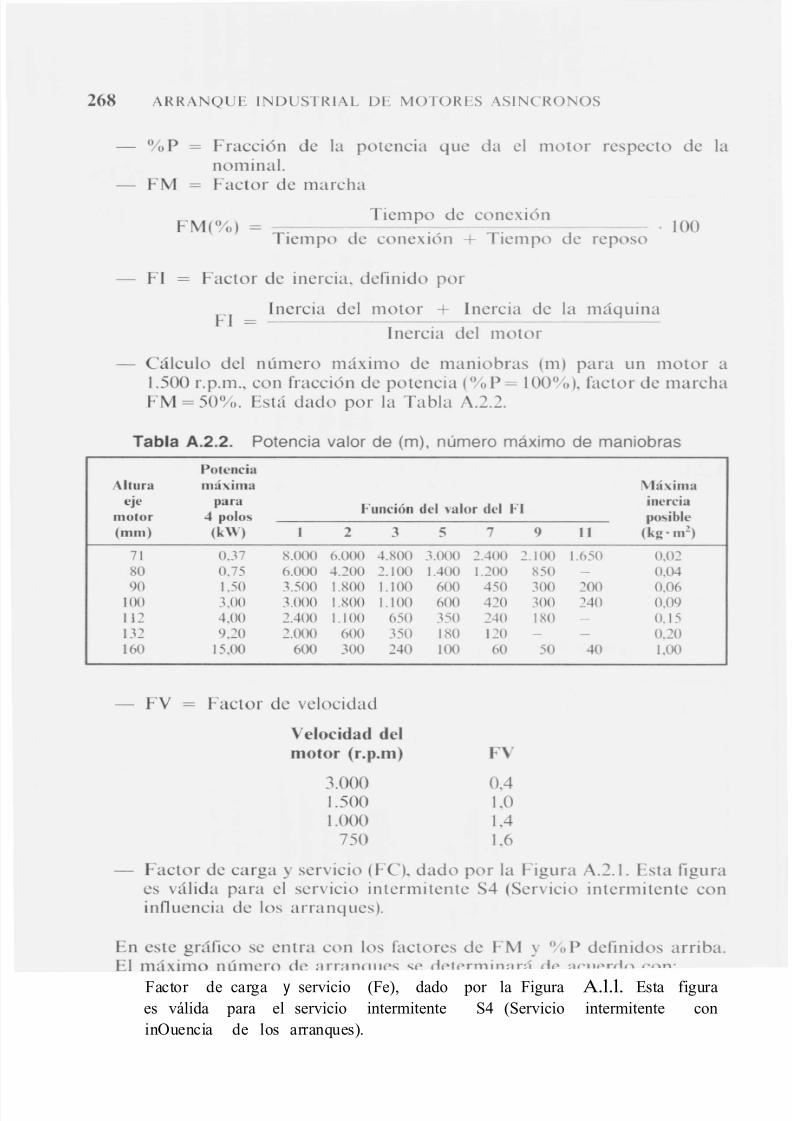
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 285/343
268 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
% P Fracción de la potencia que da el motor respecto de la
nominal.FM Factor de marcha
Tiempo de conexlOnFM(%) = .. . 100
Tiempo de conexión + Tiempo de reposo
- FI Factor de inercia, definido por
Inercia del motor + Inercia de la m::iquinaFI = ---------------
Inercia del motor
Cálculo del número máximo de maniobras (m) para un motor a1.500 r.p.m., con fracción de potencia (% P = 100%), factor de marchaFM = 50%. Está dado por la Tabla A.2.2.
Tabla A.2.2. Potencia valor de (m), número máximo de maniobras
Potencia
Altura máxima Máximaeje para
Función del valor del FI inercia
motor 4 IlOlos posible(mm) (kW) 1 2 3 5 7 9 1 1 (kg' m2
)
71 0.37 8.000 6.000 4.800 3.000 2.400 2.100 1.650 0.0280 0,75 6.000 4.200 2.100 1.400 1.200 850 - 0,0490 1.50 3.500 1.800 1.100 600 450 300 200 0,06
100 3,00 3.000 1.800 1.100 600 420 300 240 0,09112 4,00 2.400 1.100 650 350 240 180 - 0.15132 9,20 2000 600 350 180 120 - - 0.20t60 15.00 600 300 240 100 60 50 40 1,00
- FV Factor de velocidad
Velocidad delmotor (r.p.m)
3.0001.5001.000
750
FV
0,41,01 ,4
1 ,6
Factor de carga y servicio (Fe), dado por la Figura A.l.l. Esta figuraes válida para el servicio intermitente S4 (Servicio intermitente coninOuencia de los arranques).
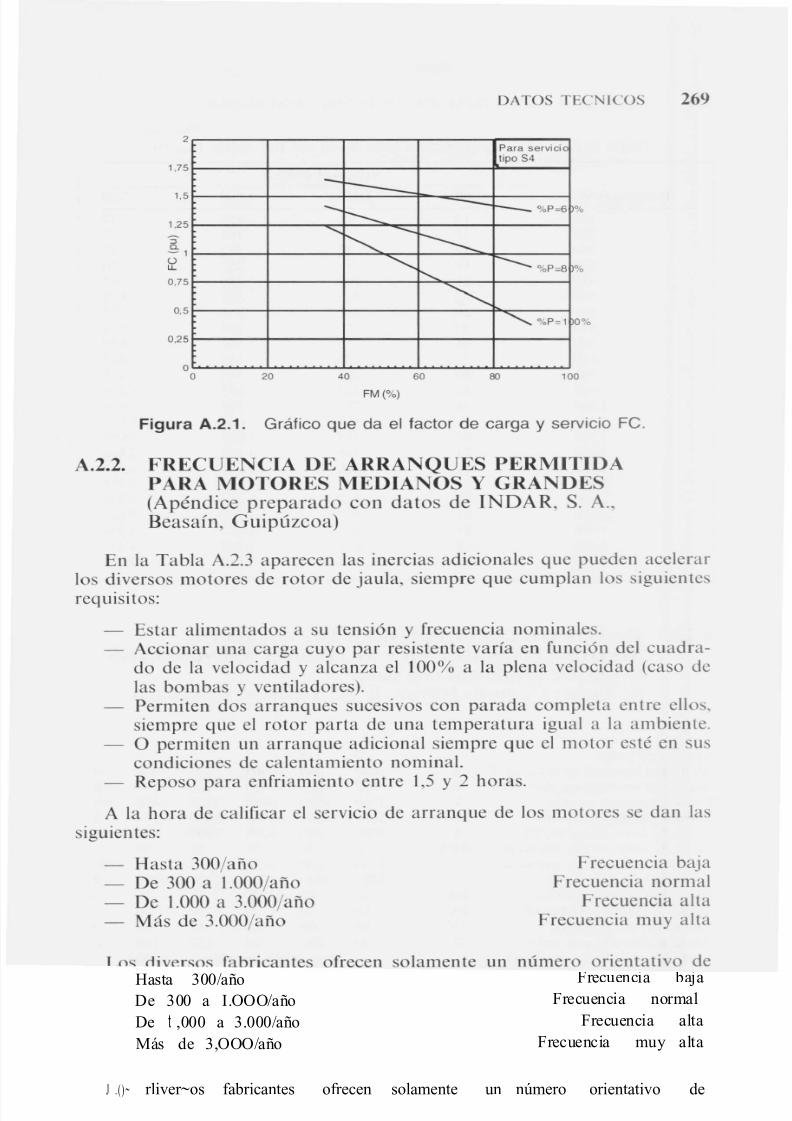
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 286/343
DATOS TECNICOS 269
Para servid
tipo 54
1,75
1,5
1,25
'§ :-1
t e0,75
0,5
0,25
%P=6 %
%P=8 %
%P=1 0%
oO 20 40
FM(%)
60 80 100
Figura A.2.1. Gráfico que da el factor de carga y servicio Fe,
A.2.2. FRECUENCIA DE ARRANQUES PERMITIDAPARA MOTORES MEDIANOS Y GRANDES(Apéndice preparado con datos de INDAR, S. A.,
Beasaín, Guipúzcoa)
En la Tabla A.2.3 aparecen las inercias adicionales que pueden acelerar los diversos motores de rotor de jaula, siempre que cumplan los siguientesrequisitos:
- Estar alimentados a su tensión y frecuencia nominales.- Accionar una carga cuyo par resistente varía en función del cuadra-
do de la velocidad y alcanza el 100% a la plena velocidad (caso de
las bombas y ventiladores),Permiten dos arranques sucesivos con parada completa entre ellos,siempre que el rotor parta de una temperatura igual a la ambiente.O permiten un arranque adicional siempre que el motor esté en suscondiciones de calentamiento nominal.
- Reposo para enfriamiento entre 1 ,5 Y 2 horas.
A la hora de calificar el servicio de arranque de los motores se dan lassiguientes:
Hasta 300/añoDe 300 a I.OOO/añoDe t ,000 a 3.000/añoMás de 3,OOO/año
Frecuencia bajaFrecuencia normal
Frecuencia altaFrecuencia muy alta
J . ( )~ rliver~os fabricantes ofrecen solamente un número orientativo de
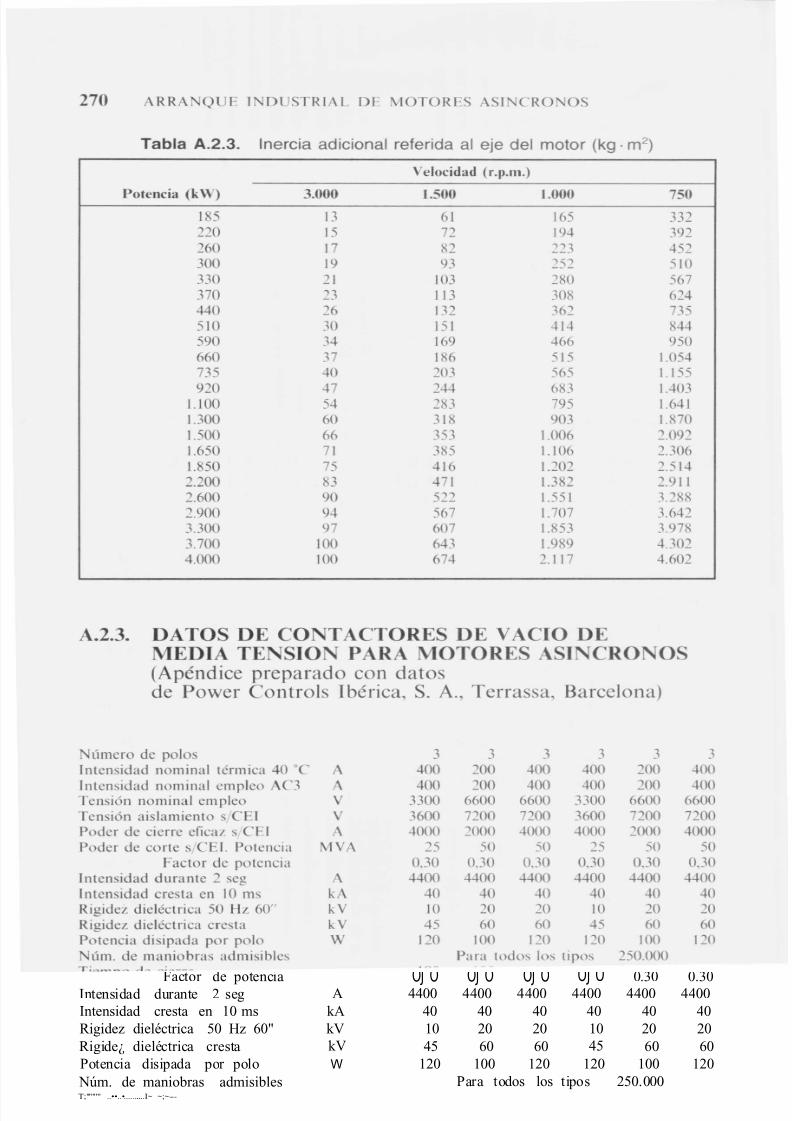
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 287/343
270 ARRANQUE INDUSTRIAL DI-: MOTORES ASINCRONOS
Tabla A.2.3. Inercia adicional referida al eje del motor (kg· m2)
Velocidad (r.p.m.)Potencia (kW) 3.000 1.500 1.000 750
185 13 61 165 332220 15 12 194 392260 17 82 223 452300 19 93 252 510330 21 103 280 567370 23 113 30R 624440 26 132 362 735510 30 151 414 844
590 34 169 466 950660 37 186 515 1.054735 40 203 565 1.155920 47 244 6R3 1.403
1.100 54 283 795 1.6411.300 60 318 903 1.8701.500 66 353 1.006 2.0921.650 71 385 1.106 2.3061.850 75 416 1.202 2.5142.200 83 471 1.382 2.9112.600 90 522 1.551 3.288
2.900 94 567 1.707 3.6423.300 97 607 1.853 3.9783.700 100 643 1.989 4.3024.000 100 674 2.117 4.602
A.2.3. DATOS DE CONTACTORES DE VACIO DEMEDIA TE SIO PARA MOTORES ASI CRONOS(Apéndice preparado con datos
de Power Controls Ibérica, S. A., Terrassa, Barcelona)
Número de polos 3 3 3 3 3 3Intensidad nominal térmica 40 ·C A 400 200 400 400 200 400Intensidad nominal empleo AC3 A 400 200 400 400 200 400Tensión nominal empleo V 3300 6600 6600 3300 6600 6600Tensión aislamiento s CEI V 3600 7200 1200 3600 7200 7200Poder de cierre efica¿ s CEI A 4000 2000 4000 4000 2000 4000Poder de corte s/CEI. Potencia MVA 25 50 50 25 50 50
Factor de potencia OJ O OJ O OJ O OJ O 0.30 0.30Intensidad durante 2 seg A 4400 4400 4400 4400 4400 4400Intensidad cresta en 10 ms kA 40 40 40 40 40 40Rigidez dieléctrica 50 Hz 60" kV 10 20 20 10 20 20Rigide¿ dieléctrica cresta kV 45 60 60 45 60 60Potencia disipada por polo W 120 100 120 120 100 120
Núm. de maniobras admisibles Para todos los tipos 250.000T;""""' ..••..•............I~ ~;~---
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 288/343
DATOS TECNICOS 271
A.2.4. CLASIFICACION DE CONTACTO RESPARA CORRIENTE ALTERNA(Para la redacción de este apéndice se ha tomado el catálogo«Series F + CV», cedido por Telemecánica S. A., Madrid)
Las categorías de empleo normalizadas fijan los valores de la corriente queel contactor debe de establecer o cortar, y dependen de:
De la naturaleza del receptor controlado: motor de jaula o de anillos,resistencias.De las condiciones en las cuales se efectúan cierres y aperturas:
motor lanzado, calado o en arranque, inversión del sentido de lamarcha, frenado a contracorriente.
En corriente alterna se definen las siguientes categorías:
AC-l
Se aplica a todos los aparatos de utilización en corriente alter-na (receptores), cuyo factor de potencia es al menos igual a 0,95(cos <p? 0,95).
Ejemplo de utilización: calefacción, distribución.
AC-2Se refiere al arranque, al frenado en contracorriente, a la marcha por impulsos de los motores de anillos.Al cierre, el contactor establece la intensidad de arranque del ordende 2,5 veces la intensidad nominal del motor. A la apertura elcontactor debe de cortar la intensidad de arranque con una tensiónigualo inferior a la de red.
AC-3Se refiere a los motores de jaula, el corte se realiza a motor lan-zado.Al cierre, el contactor establece la intensidad de arranque de 5 a7 veces la intensidad nominal del motor.
A la apertura, corta la intensidad nominal absorbida por el motor;en este momento la tensión en las bornas de sus polos es del ordendel 20% de la tensión de la red. El corte es fácil.
Ejemplos de utilización: todos los motores de jaula corrientes; as-censores, escaleras mecánicas, cintas transportadoras, elevadores decangilones, compresores, bombas, amasadoras, c1imatizadores, etc.
AC-4
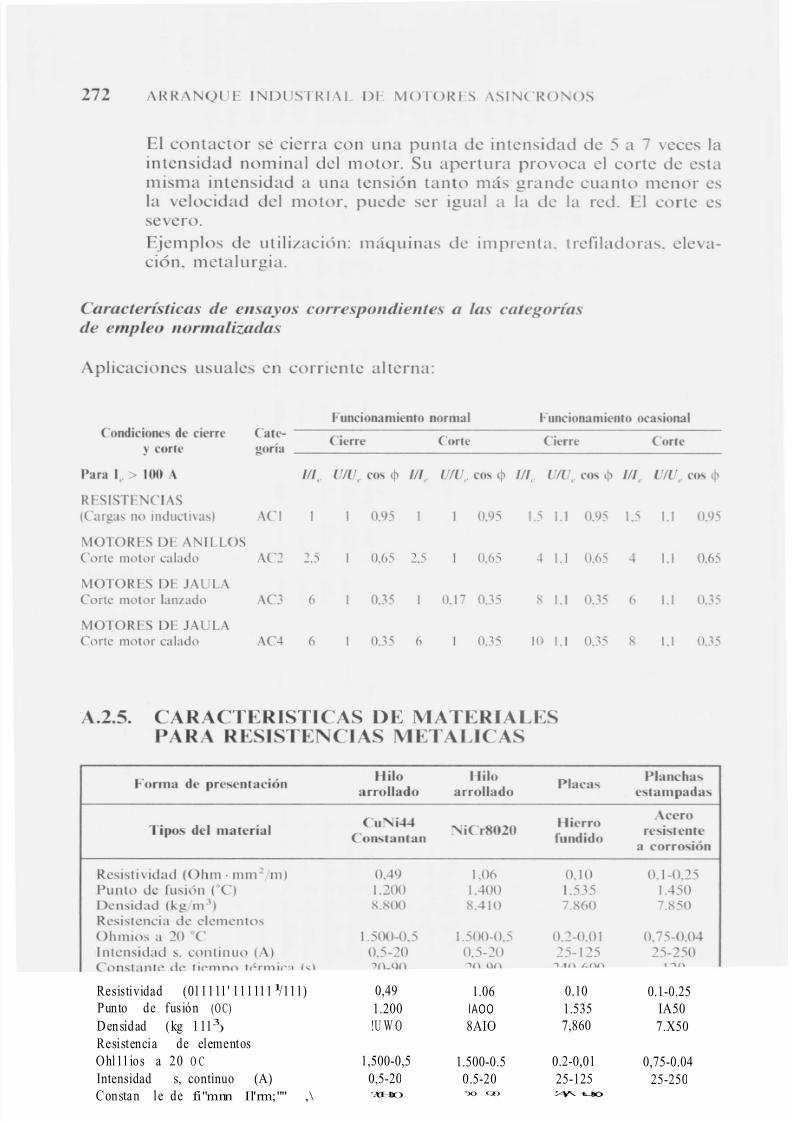
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 289/343
272 ARRANQ UE INDUSTRIAL DE M OTORES ASINCRONOS
El contactor se cierra con una punta de intensidad de 5 a 7 veces laintensidad nominal del motor. Su apertura provoca el corte de estamisma intensidad a una tensión tanto m<:lsgrande cuanto menor esla velocidad del motor. puede ser igual a la de la red. El corte essevero.
Ejemplos de utilización: máquinas de imprenta, trefiladoras. eleva-ción. metalurgia.
Características de ensayos correspondientes a las categorías
de empleo normalizadas
Aplicaciones usuales en corriente alterna:
Funcionamiento normal Funcionamiento oeasionalCondiciones de cierre Cate-
Cierre Corte Cierre Corte)' corte goría
Para 1"> 100 A l I J • . V lV" cos < P lIJ " V lV" cos < P 1 / / " V lV" cos < P 1 / 1 " V lV" cos < P
RESISTENCIAS
(Cargas no inducti\'as) ACI 0,95 0.95 1.5 1.1 0.95 1.5 1.1 0.95
MOTORES DE ANILLOSCorte motor calado AC2 2.5 0.65 2.5 0.65 4 1.1 0.65 4 1.1 0.65
MOTORES DE JAULACorte motor lanLado AC3 6 0.35 0.17 0.35 X 1 .1 0 .35 6 1.1 0.35
MOTORES DE JAULACorte motor calado AC4 6 0.35 6 0.35 10 1.1 0.35 1.1 0.35
A.2.5. CARACTERISTICAS DE MATERIALESPARA RESISTENCIAS METALICAS
Forma de presentación Hilo Hilo
Placas Planchas
arrollado arrollado estampadas
CuNi44 Hierro Acero
Tipos del materialConstantan
:'<IiCr8020fundido
resistentea corrosión
Resistividad (011111' 1111111/111) 0,49 1.06 0.10 0.1-0.25Punto de fusión (O C) 1.200 IAOO 1.535 IA50Densidad (kg 1113
) !U W O 8AIO 7,860 7.X50Resistencia de elementosOhl11ios a 20 O C 1,500-0,5 1.500-0.5 0.2-0,01 0,75-0.04Intensidad s, continuo (A) 0,5-20 0.5-20 25-125 25-250Constan le de fi"mnn Il'rm;"" ,\ ?(H)() ')() Q() 'A{\ tJ)()

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 290/343
DATOS TECNICOS 273
Con estas características se pueden calcular los elementos resistentes.
Recomendamos la consulta de la referencia (10), en cuyas tablas de las páginas 258 a 262 se dan gran cantidad de datos numéricos para el cálculode elementos resistivos.
A.2.6. ESPECIFICACIONES PARA RESISTENCIAS
Vamos a resumir las designaciones normalizadas para resistencias:
Corriente nominal ( IN ) ' Es el valor nominal de la corriente del circuito en el
que va insertado el reostato.
Corriente de conexión para un escalón (1¡). Corriente inmediatamente ante-rior a la conexión de un escalón determinado.
Corriente de punta para un escalón (12), Corriente inmediatamente poste-rior a la conexión de un escalón determinado.
Corriente media para un escalón (1Illcd). Se expresa como la media entre 11
e 12 , Se suele tomar la media aritmética o la geométrica.
Illlcd = Y 2 (1 1 + 1 2 ) Illlcd = (1 1 ./2 )1 / 2
Potencia media para un escalón (Plllcd ). Se expresa como:
Plllcd = U ·/lllcd =)3. U ·/lllcd
Severidad del arranque (f). Se expresa como:
. f = I I l l C d / I N
Siendo I N la corriente nominal del motor.Se han normalizado los siguientes valores del factor e n de severidad:
Severidad (f)
0,71,42,0
Tipo de arranque
Arranque a media cargaArranque a plena cargaArranque duro
Coeficiente de rotor (kJ Es el valor dado por la expresión:
k r = tensión a rotor parado entre anillos/)3 ·1 N rOlor
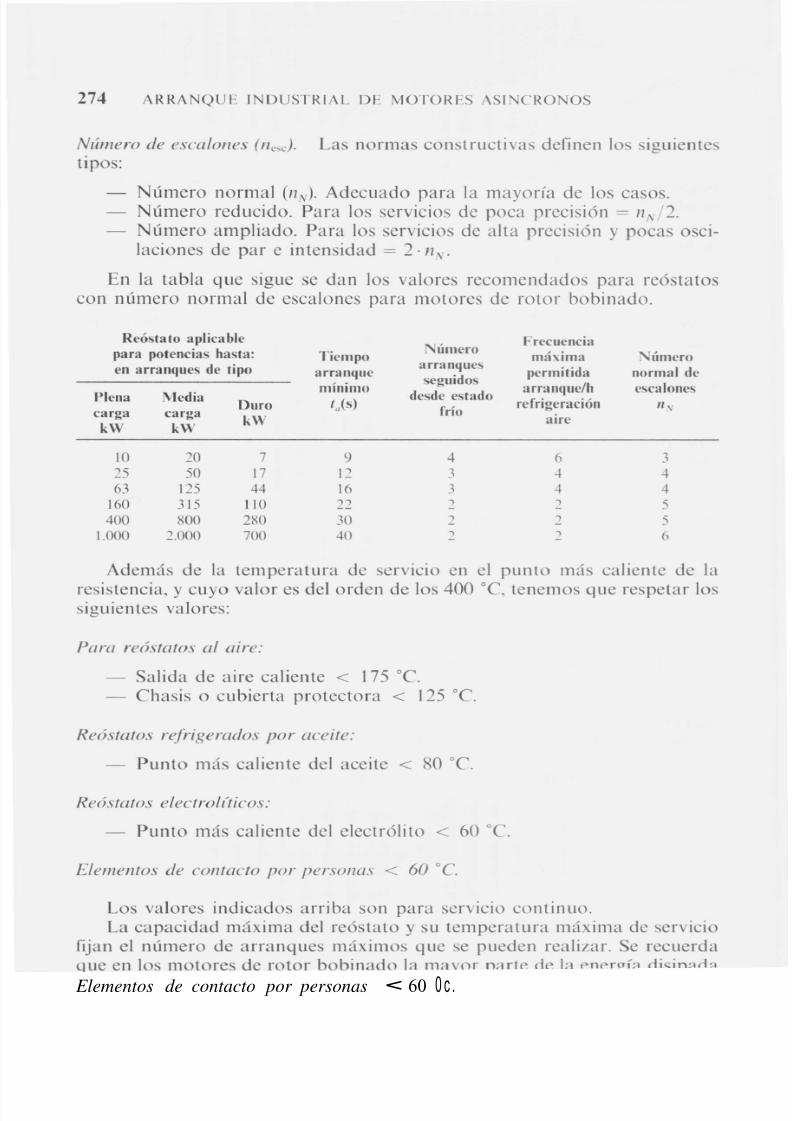
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 291/343
274 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Número de escalones (nc,c). Las normas constructivas definen los siguientestipos:
Número normal (I1N). Adecuado para la mayoría de los casos. Número reducido. Para los servicios de poca precisión = 11" , /2 .
úmero ampliado. Para los servicios de alta precisión y pocas osci-laciones de par e intensidad = 2· I1v.
En la tabla que sigue se dan los valores recomendados para reóstatoscon número normal de escalones para motores de rotor bobinado.
Reóstato aplicable I úmero Frecuencia para potencias hasta: Tiempo máxima Númeroen arranques de tipo arranque
arranques permitida normal de
seguidosPlena Media
mínimodesde estado
arranque/h escalonesDuro ',,(s) frío
refrigeración 11,carga carga
kW airekW kW
10 20 7 9 4 6 325 50 17 12 3 4 463 125 44 16 3 4 4
160 315 110 22 2 2 5
400 800 280 30 2 2 51. 000 2 . 000 700 40 2 2 6
Además de la temperatura de serVICIO en el punto más caliente de laresistencia, y cuyo valor es del orden de los 400 0 C , tenemos que respetar lossiguientes valores:
Para reósfatos al aire:
Salida de aire caliente < 175 0 c .Chasis o cubierta protectora < 125 0 c .
Reóstafos refrigerados por aceite:
- Punto más caliente del aceite < 80 0 c .
Reástafos e1ectrol(ticos:
- Punto más caliente del electrólito < 60 0 c .
Elementos de contacto por personas < 60 0 c .
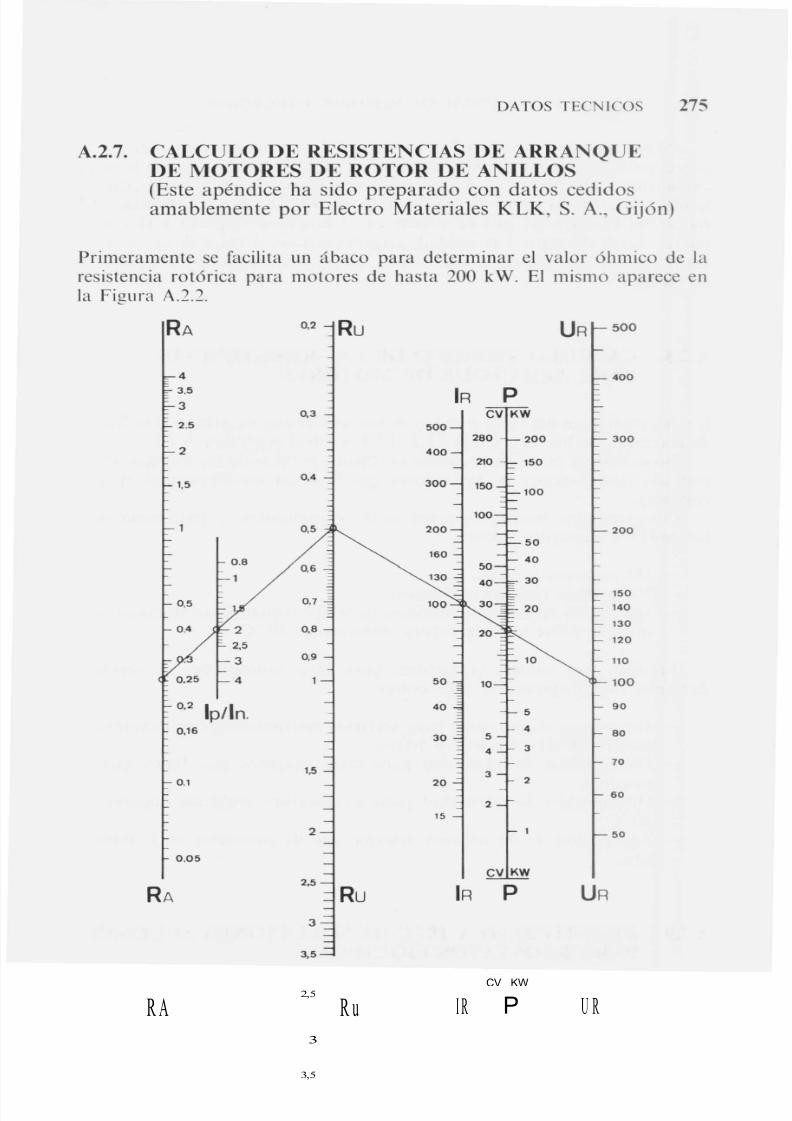
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 292/343
DATOS TECNICOS 275
A.2.? CALCULO DE RESISTENCIAS DE ARRANQUE
DE MOTORES DE ROTOR DE ANILLOS(Este apéndice ha sido preparado con datos cedidosamablemente por Electro Materiales KLK, S. A., Gijón)
Primeramente se facilita un ábaco para determinar el valor óhmico de laresistencia rotórica para motores de hasta 200 k W. El mismo aparece enla Figura A.2.2.
0,2 Ru U R 500
4
3.5
3
2.5
400
I R P0,3 CV KW
500
2 400
280 200 300
200
150
140
130
120
110
50 10 100
0,2 I p /l n . 405
90
0,16 480
30 5
4 3
701,5
30.1 20 2
60
2
15
2 50
0,05
CV KW2,5
I R P U RR A R u3
3,5
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 293/343
276 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Primeramente uniremos tensión rotórica (U }{) o intensidad rotórica (l R )
con el punto que da la potencia del motor P. En la prolongación de la rectaencontramos el valor de Re O resistencia unitaria por fase en ohmios, que esla que conectada al rotor, da para s = O la intensidad y el par nominales delmotor. Si la corriente que se admite en el arranque respecto a la nomi-nal (lj 1 N ) es diferente a la unidad, determinaremos el valor de la resisten-cia R A por la segunda recta, uniendo R u e 1 p / 1'1' Estos son valores por faseen ohmios.
A.2.8. CALCULO TERMICO DE LAS RESISTENCIASPARA ARRANQUE DE MOTORES
La determinación del valor óhmico de las resistencias de arranque se hacende acuerdo con los Apartados 3.1.2, 3.2.1, 4.4 o el Apéndice A.2.7.
Sin embargo, es preciso realizar el cálculo térmico de las mismas. Paraello hay que disponer de los valores que facilitan los fabricantes en suscatálogos.
Los elementos resistivos suelen estar normalizados, y para cada unotenemos los siguientes valores:
Dimensiones y pesos.Valor de la resistencia óhmica.Intensidad en servicio continuo para el calentamiento nominal. ex-
presado sobre la temperatura ambiente de 40 0 e .
También dan valores correctores para otras condiciones de serVICIO
diferentes de las apuntadas, tales como:
Incremento de corriente para servicios intermitentes con factores demarcha (FM) inferiores al 100%.Disminución de intensidad para calentamientos más bajos que elnominal.Disminución de intensidad para temperatura ambiente superior a40°e.
- Agrupación de un número determinado de elementos en la misma
caja.
A.2.9. RESISTIVIDAD A 18°C DE SOLUCIONES ACUOSASPARA REOSTATOS LIQUIDOS
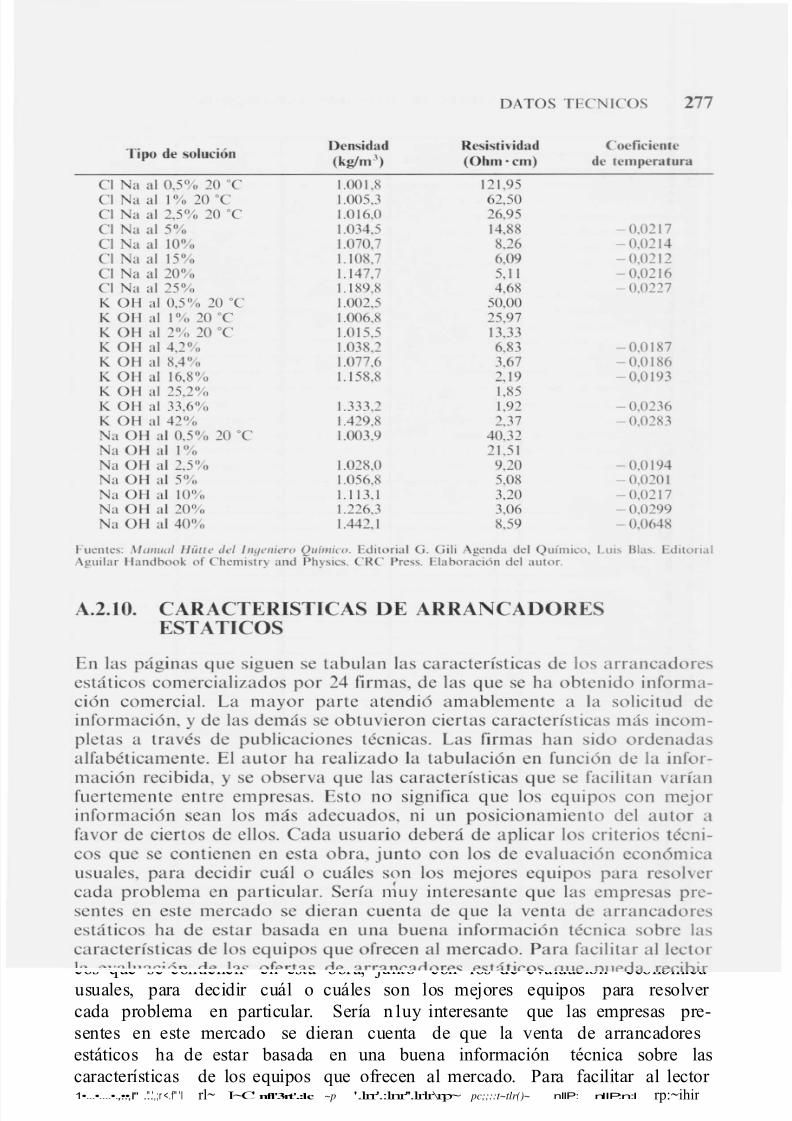
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 294/343
DATOS TECNICOS 277
Tipo de solución
CI Na al 0 ,5% 20 "CCI Na al 1% 20 ·CCI Na al 2,5% 20 "CCI a al 5%CI a al 10%CI a al 15%CI Na al 20%CI Na al 25%K 01-1 al 0,5% 20 "CK 01-1 al 1% 20 "C
K 01-1 al 2% 20 · C
K 01-1 al 4,2%K 01-1 al 8,4%K 01-1 al 16,8%K 01-1 al 25,2°/.,K 01-1 al 33,6%K 01-1 al 42%
Na 01-1 al 0,5% 20 ·Ca 01-1 al 1%
a 01-1 al 2,5%Na 01-1 al 5%
Na 01-1 al 10% Na 01-1 al 20%
a 01-1 al 40%
Densidad(kg/mJ
)
1.001,81.005,31.016,01.034,51.070,71.108,71.147,71.189,81.002,51.006,81.015,5
1.038,21.077,61.158,8
1.333,21.429,81003,9
1.028,01.056,81. ¡13,11.226,31.442,1
Resistividad(Ohm'cm)
121,9562,5026,9514,88
8,266,095,114,68
50,0025,9713,33
6,833,672,191,851,922,37
40,3221,51
9,205,083,203,068,59
Coeficientede temperatura
-0,0217-0,0214- 0,0212-0,0216-0,0227
-0,0187-0,0186-0,0193
-0,0236-0,0283
-0,0194-0,0201- 0,0217-0,0299-0,0648
Fuentes: 1I11111l /( //Hii rte e/e/ l llyell iero Ql lfmico. Editorial G. Gili Agenda del Qufmieo, Luis Bias. EditorialAguilar Handbook of Chemistry and Physics. CRC Press. Elaboración del autor.
A.2.l0. CARACTERISTICAS DE ARRANCADORESESTATICOS
En las páginas que siguen se tabulan las características de los arrancadores
estáticos comercializados por 24 firmas, de las que se ha obtenido informa-ción comercial. La mayor parte atendió amablemente a la solicitud deinformación, y de las demás se obtuvieron ciertas características más incom- pletas a través de publicaciones técnicas, Las firmas han sido ordenadasalfabéticamente. El autor ha realizado la tabulación en función de la infor-mación recibida, y se observa que las características que se facilitan varíanfuertemente entre empresas. Esto no significa que los equipos con mejor información sean los más adecuados, ni un posicionamiento del autor afavor de ciertos de ellos. Cada usuario deberá de aplicar los criterios técni-
cos que se contienen en esta obra, junto con los de evaluación económicausuales, para decidir cuál o cuáles son los mejores equipos para resolver cada problema en particular. Sería n1uy interesante que las empresas pre-sentes en este mercado se dieran cuenta de que la venta de arrancadoresestáticos ha de estar basada en una buena información técnica sobre lascaracterísticas de los equipos que ofrecen al mercado. Para facilitar al lector 1•...•....•..••,..,I" ..." ',;r <.f" 'I rl~ I~C' nfl'3rt'.:lc ~p '.lrr'.:lnr''.lrlr\rp~ pc;;::t~tlr()~ nllP: nllP:n:l rp:~ihir

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 295/343
278 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
A B B 'Ierr o n A E G A G L T C a t in g S . A .O E H E lO E H E D T h ) 'r o s o ft \S T A T S a f t ro n i c s
C a r a c l e r í s ti c a s e l é c t r ic a sT ens ió n d e a l im ent a c ió n V 22 0 a 2 3 0 2 2 0 a 2 . ¡ Q
3 80 a 4 1 5 4 0 0 3 8 0 a 4 1 5H O
5 0 0 5 ('1 .) 4 S 0 a 5 0 0F r e c u e nc i a H z 5 0 o 6 0 5 0 0 6 0 5 0 0 6 0 5 0 o 6 0In t e n s i d a d no m i n a l A 1h a , t a 84 0 1 2 h N a 1 0 7 5 6 h a st a 1 3 0 0
E n 2 0 t i p o s E n 4 0 t ip o s E n 1 7 l ip o s E n 1 9 t i p o sR e fr i g e ra c ió n fo rza d a > 7 5 AP o te n c i a d e l m o to r k W 1 .1 h a s ta 5 6 0 7 .5 h a s t a 71 0 1 .1 h a s ta 75 0 2 .2 h a s t a 80 0Pé rd id a s I V 26 0 0 co n 74 0 i\
C o nt en id o s a rm ó ni co , < 5°0
C a p a c id a d d e a r r a n q u e 6 x 1 e n 1 0 . 4 \1 20 ' I a r r a n q u e 1 5~Io d o s d e a r ra nq ueR a m p a d e t e n s ió n D e la 6 0 s S I D e l a 6 0 s
D eO A U aUL ím i t e d e co r r i en t e 2 .5 a 5 ¡m o to r 2 a 5 Im o to r S IIm p u l s o " b o o ,te r » S I' Io d o s d e p a ra d aP a r a d a l i b r e S I S IR a m p a d e t e n s ió n D e l a l20 s S IP a r a b o m b a s . r am p a t e n s i ó n
In y e c c ió n d e c c o n t in u a S IO p c ió n a h o r ro e n e r g é t i c o S I S I S I\ Io d o b y -p a s s V a no s m o to r e s S IC o n e c l a b le e n e l t r i á n g u lo D a h a s ta 1 2 5 0 k \ \ 'P ro t e cc io nesIn t e g r a d a m o to r a r r a n c a d o r S I A u to d i a g n ó s t i c o S IC a i c l l l am i e n lo m o t o r S I S IC a l e n t am i e n t o m e d i oC a l e n t am i e n t o i n s t a ll l á n e oF a l t a d e fa ,e S ID e s e q u i l i b r i o d e f a s e
F a l l o r e f r ig e r a c ió n S IC o r to c i r c u i to S IS u b y so b re t en s ió n d e redPi lo to s d e \ isua li7.3 C ió n S IF a l lo R O JOA larm aT en s i ó n t o t a l a p l i c a d a A m ari lloM o to r e n s e r v ic io V e r d eR e lé s d e sa l i d a S I
N ú m e r o 5Po t e n c i a d e em p l e o a 220 \ ' V A
In t e n s i d a d d e em p l e o A 1 .5D u r a c i ó n m e c á n i c aC o nd i c io nes am b i en t a le sM á x im a t em p e r a t u r a d e s e n i c i o 'C 5 0 4 0M á x im a h um e d a d d e s c n i c i oM á x im a a l t i t u d S .n .m . m H X X l
G r a d o d e P r o t e c c ió n I PO O .e a J a 1P 3 2 6 5 V e r so a nt i d e f lag ra l l leD""';"'nn"';'" .• "',,1••......
. . .
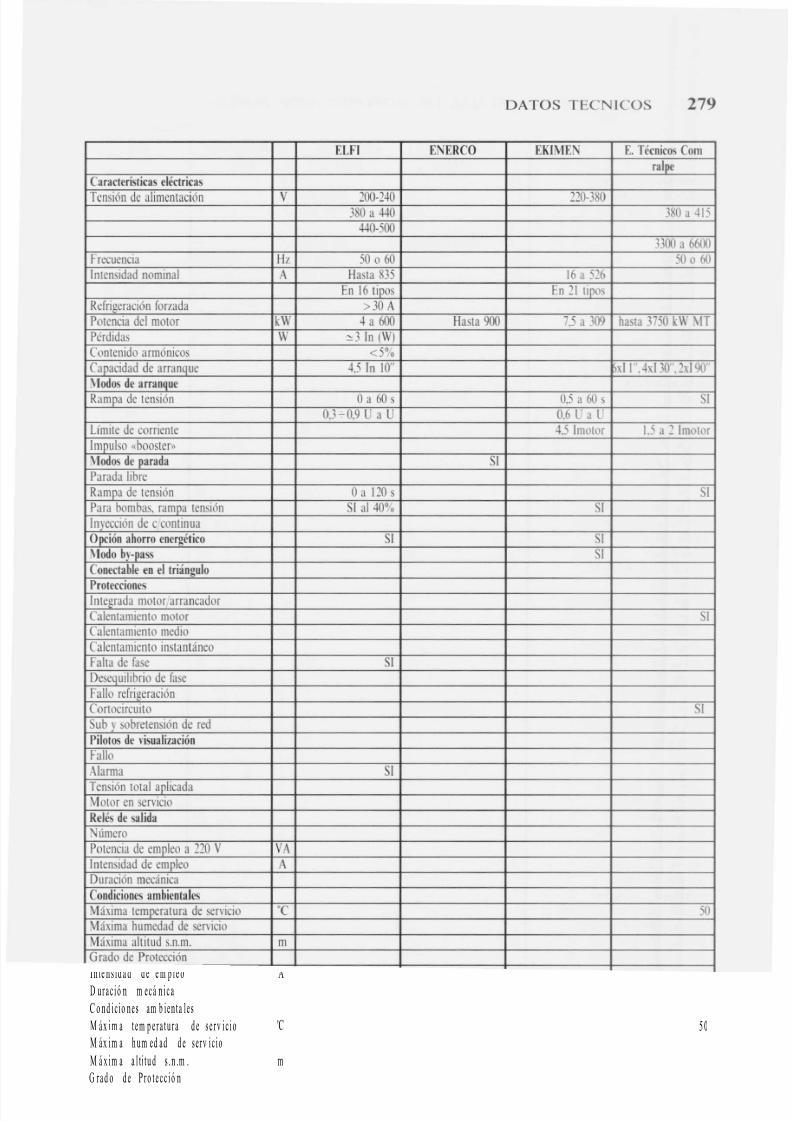
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 296/343
DATOS TECNICOS 279
E L F I E N E R C O E K IM E N E . T é c nic o s C o m
ralp eC a r a c t e r í s ti c a s e l é c t r i c a sT ens i ó n d e a l im en t ac i ó n V 2 0 0 ·2 4 0 22 0 ·3 8 0
3 8 0 a 4 4 0 3 8 0 a 4 1 54 4 0 ·5 0 0
3 3 0 0 a 6 6 0 0F r e c u e n c i a H z 5 0 0 6 0 5 0 o 6 0In t en s i d ad no m i n a l A H a s t a 83 5 1 6 a 5 26
E n 1 6 t i p o s E n 2 1 t ip o sR ef r i g er a c i ó n fo rza d a > 3 0 APo t enc i a d e l m o to r k W 4 a 6 0 0 H a s t a 9 0 0 7 ,5 a 3 0 9 h a s ta 3 7 5 0 k W M TP é r d i d a s W , , 3 In (W )
C o n t en id o arm ó n i co s < 5 %C a p a c id a d d e a r r a n q u e 4 ,5 In 1 0 " x l l" ,4 x I3 0 " ,2 x I9 O "~Io d o s d e ar r a nq ueR am p a d e t ens i ó n O a 6 0 s 0 ,5 a 6 0 s S I
O Y-0.9 U a U 0 .6 U a UL ím i t e d e c o r r i e n t e 4 .5 lm o to r 1 .5 a 2 Im o to rIm p u lso "b o o s t e r»~ Io d o s d e p ar ad a S IPa r a d a l i b r eR am p a d e te n s i ó n O a 1 20 s S IPa r a b o m b a s , r am p a t en s i ó n S I a l 4 0 % S I
In y ccc i ó n d e c co n t i n u aO p ci ó n ah o r ro ene rg é l i c o S I S I~Io d o b y -p as s S IC o n ce l a b l e en e l t r i án eu l oP r o t e c c i o n e sIn t eg rad a m O lo r ' a r r a nca d o rC a l e n t a m ie n to m o to r S IC a l en t am i en t o m ed i oC a l e n t am i e n t o i n s ta n t á n e oF a l ta d e fa s e S ID e s eq u i l i b r i o d e f a s e
F a l l o r e f r i g e r a c i ó nC o rto ci rc ui to S IS u b 1 s o b r e l en s i ó n d e r edPi lo t o s d e v i sua l i za c i ó nF al loA la rm a S IT en s i ó n t o t a l ap l i c ad aM o to r en se rv i c i oR elé s d e sa l i d a
N ú m er oP o t e nc ia d e e m p l e o a 22 0 V V A
In t e n s i d a d d e em p l e o AD u r a c i ó n m ecá n i c aC o nd i c i o nes am b i en t a lesM áx im a t em p e r a t u r a d e s e r v i c i o 'C 5 0M áx im a h um ed ad d e serv i c i oM á x im a a l t i t u d s .n .m . mG r ad o d e P r o t e c c i ó n
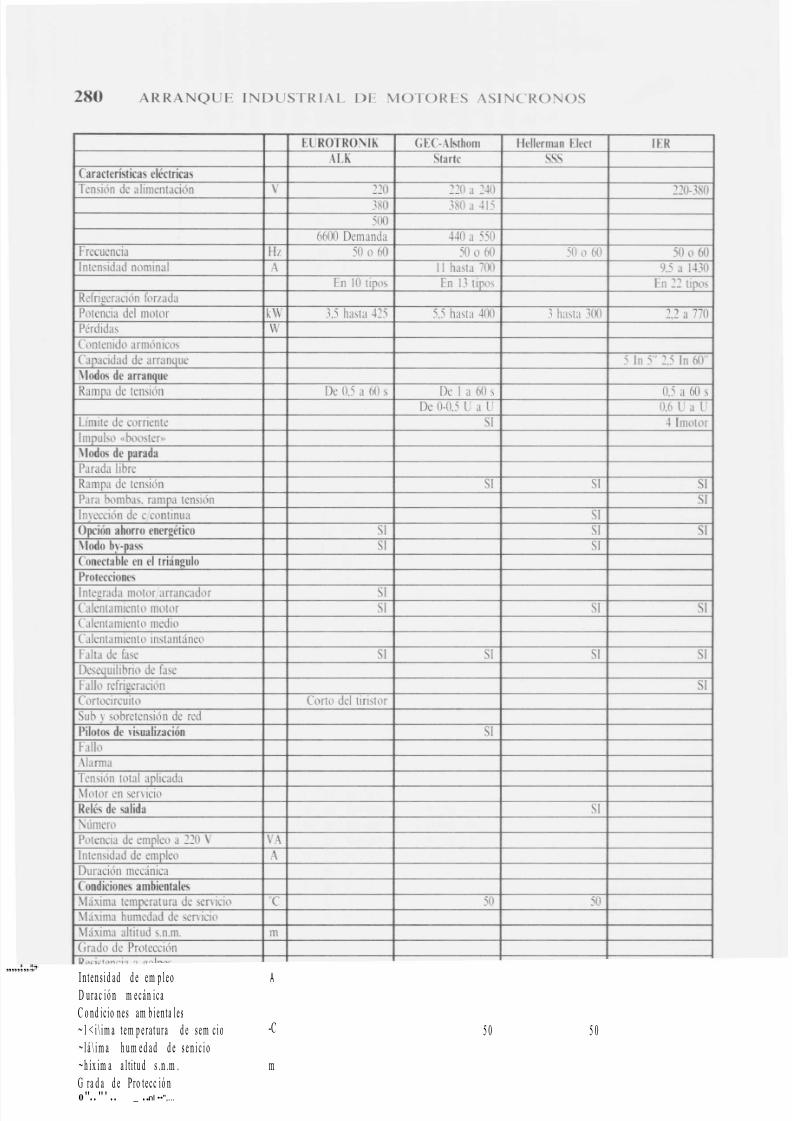
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 297/343
280 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
E L !R O T R O \II \ G E C - A l s th o m H e l le r m a n E l e cl IE R
A L I\ S la r l c S S S
C a r a c l e r í s l i c a s e l é c l r i c a sT ens ió n d e a l im ent ac ió n \' 2 2 0 2 2 0 a 2~ 0 22 0 -3 80
3 8 0 3 8 0 a m5 0 0
6 6 0 0 D e m a n d a ~ ~O a 5 5 0F r e c u cne i a H I 5 0 o 6 0 5 0 o 6 0 5 0 o 6 0 5 0 o 6 0In t e n s i d a d no m i n a l ~ 1 I h a s t a 70 0 9 .5 a 1 ~3 0
E n 1 0 tip o s E n 1 3 tip o , fn 22 t i p o sR e fr i g e ra c ió n fo r t ad aPo t enc i a d e l m o to r kW 3 .5 h a s ta 4 2 5 5 .5 h a st a ~O O 3 h a s t a 3 0 0 Ua 7 7 0Pé rd id a s \1 '
C o nt en id o a rm ó ni co sC a p a c i d a d d e a r r a nq u e 5 I n 5 2 . 5 I n 6 0~Io d o s d e a r ra nq ueR a m p a d e te n s ió n D e O .5 a 6 0 s D e l a 6 0 s 0 .5 a 6 0 s
D eO -O .5 lJa U 0 . 6 U a l JL ím i t e d e co r r i en t e S I ~ ¡m o to rIm p u ls o "b o o s t e r »~Io d o s d e p ara d aP a r a d a l i b r eR a m p a d e te n s ió n S I S I S IP a r a b o m b a s . r am p a t e n s i ó n S I
In l e c c ió n d e c c o n t in u a S IO p c ió n a h o r r o e n e r g é l i c o S I S I S I~ lo d o b y .p as s S I S IC o ne c l a b l e e u e l t r i á ng u loP r o t e c c i o ne sIn tm a d a m o t o r a r r a n c a d o r S IC a l e n t am i e n to m o to r S I S I S IC a l e n t am i e n t o m e d i oC a l e n t am i e n t o i n s t a n t á n e oF a l t a d e fa s e S I S I S I S ID e s e q u i l i b r i o d e f a s e
F a l l o r e f r i g e r a c i ó n S IC o r to c i r c u i to C o r to d e l t i r i s t o rS u b y so b r e t c n s i ó n d e r c dP i lo to s d e \ ' i sua l i z a c ió n S If a l l oA larm aT cn s i ó n t o t a l a p l i c a d aM o t o r e n s e r l i e i oR e l é s d e s a l i d a S I;' ;ú m er oP o t e n c i a d e em p l e o a 2 2 0 V \'1 \
In t e n s i d a d d e em p l e o AD u r a c i ó n m e c á n i c aC o nd i c io nes am b i en t a le s~1 < i \ im a t em p e r a t u r a d e s em c i o -C 5 0 5 0~ l á \ i m a h um e d a d d e s e n i c i o~ h íx im a a l t i t u d s .n .m . mG ra d a d e Pro t e cc ió no ". . " ' . . _ . ..nl ••",...
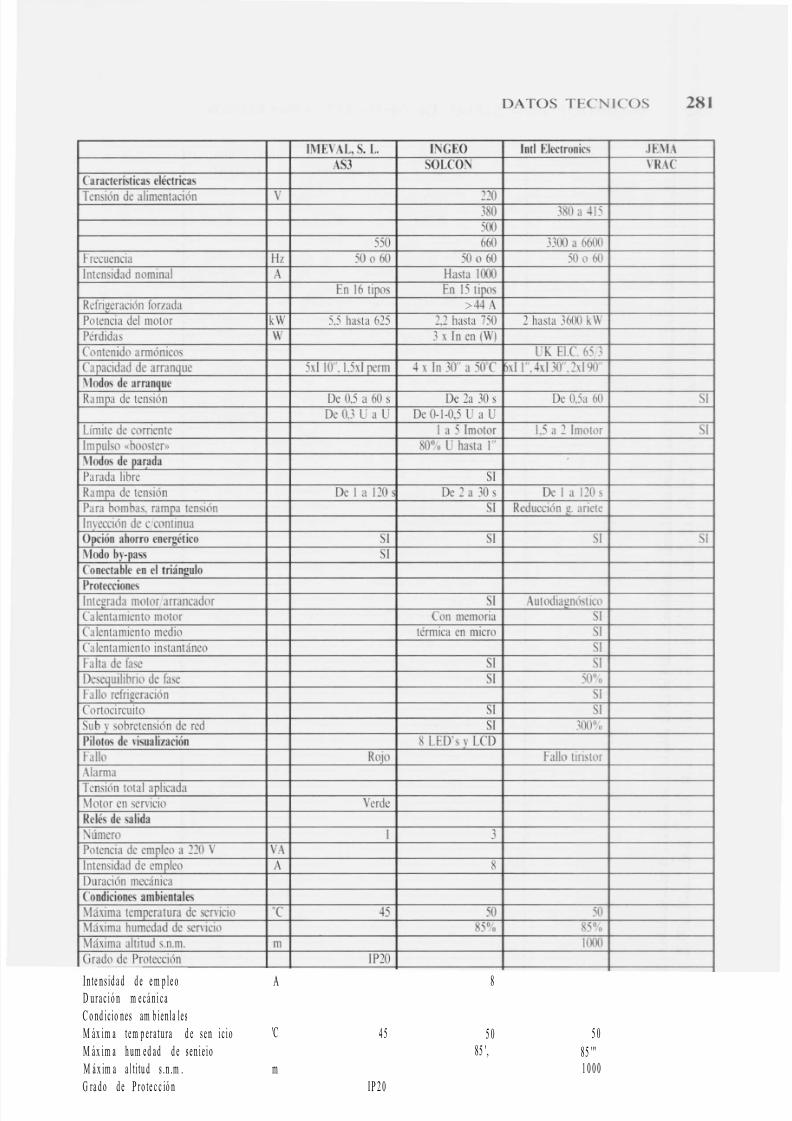
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 298/343
DATOS TECNICOS 281
IM E V A L , S . L . IN G E O In t l E l e e t r o n i c s JE M A
A S 3 S O L C O N V R A C
C a r a c l e r í s l i c a s e l é c t r i c a sT en s i ó n d e a l im en t a c i ó n V ~ ~ O
3 8 0 3 80 a 4 1 55 0 0
5 5 0 6 6 0 3 3 0 0 a 6 6 0 0F r e c u e n c ia H z 5 0 0 6 0 5 0 0 6 0 5 0 0 6 0In te n s i d a d no m in a l A H as l a 1 0 0 0
E n 1 6 t ip o s E n 1 5 l ip o sR c f r ig e r a c ió n fo r z a d a > 4 4 AP o t e n c i a d e l m o to r k W 5 .5 h a s ta 6 2 5 2 .2 h a s t a 75 0 2 h a s t a 3 6 0 0 k WPé rd i d as W 3 x I n e n (\VI
C o n t e n id o a rm ó n i c o s U K E l .e 6 5 3C a p a c id a d d e a rr a nq u e 5 .1 1 1 0 " .1 .5 x l p e rm 4 x In 3 0 " a 50 'C x ii ". 4 x I3 0 ". ~\ I9 0 '~ Io d o s d e ar r a nq ueR am p a d e te n s i ó n D e O .5 a 6 0 s D e 2 a 3 0 s D e 0 .5 a 6 0 S I
D e O JU a U D e 0 -1 -0 5 U a UL ím i te d e c o r r i e n t e 1 a 5 Im o lO r 1 .5 a ~ Im o lO r S IIm p u lso "O O o s le r» 8 0 ' , U h a s t a 1 "M o d o s d e p ar a d aP a r a d a l ib r e S IR am p a d e te n s i ó n D e I a 1 20 D e 2 a 3 0 s D e l a l~O sP a ra b o m b a s . r a m p a te n s i ó n S I R ed u cc i ó n g . a r i e l eI n v cc c i ó n d e e co n t i n u aO p c i ó n a h o r r o e n e rg é l ic o S I S I S I S I~Io d o b y -p as s S IC o n ec t a b l e en e l t r i án g u l oP r o l e c c i o n e sIn te g r a d a m o to r a r r a n e a d o r S I A u to d i a g n ó s t ic oC a l e n ta m ie n to m O lO r C o n m e m o r ia S IC a l en t a m i en t o m ed i o t é rm i c a en m i e r o S IC a le n t a m i e n to in s ta n t á n e o S IF a l t a d e f a s e S I S ID e s e q u i l i b r i o d e fa s e S I 5 0 '. ,F a l l o r e f r i g e r a c ió n S IC o r to c i r c u i t o S I S IS u b y s o b r e t e n s ió n d e re d S I 3 0 0 '"P i lo t o s d e v is u a l iz a c ió n 8 L E D 's V L C DF a l l o R o jo F a l lo t l r i s t o rA larm aT en s i ó n t o t a l ap l i c ad aM o to r en ser v i c i o V er d eR elé s d e sa l i d a~ ú m e ro I 3P o t e n c i a d e em p l e o a n o V V A
In te n s i d a d d e em p l e o A 8D u r a c i ó n m e c á n i c aC o nd i c i o nes am b i en la lesM áx im a t em p e r a t u r a d e s en i c i o 'C 4 5 5 0 5 0M áx im a h um ed ad d e s en i e i o 85 ', 85 '"M á x im a a l t i tu d s .n .m . m 1 0 0 0G ra d o d e P r o t e c c ió n IP 2 0
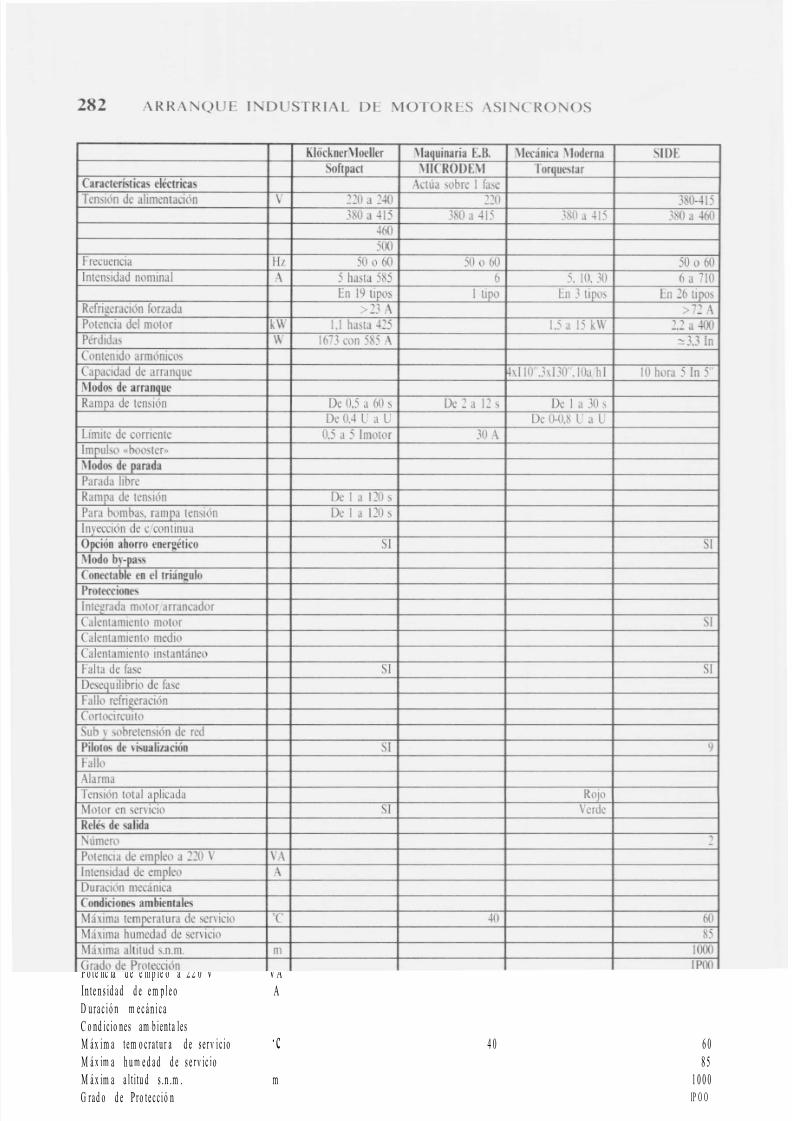
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 299/343
282 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
K l o c k n e rM o e l le r M a q u i na r ia [ B . ~ I e c á n i c a ~ l o d e r n a S IO E
S o ftp ac t 'lI C R O D E M T o rq ue s la rC a r a c t e r í s t ic a s e l é c t r i c a s A c t ú a so b r e I f a s eT en s i ó n d e a l im en t a c i ó n \' ~~O a '.j() ~ ~O 3 8 0 -4 1 5
3 ~ 0 a 4 1 5 3 8 0 a 4 1 5 3 1 > 0a 4 1 5 3 ~ 0 a ~ 6 0~ 6 05 0 0
F r e c u e n c i a H I 5 0 o 6 0 5 0 0 6 0 5 0 o 6 0In t e n s i d a d no m i n a l A 5 h a s t a 5 85 6 5 . 1 0 . 3 0 6 a 7 1 0
E n 1 9 tip o s I t i p o E n 3 t ip o , E n ~6 t ip o ,R e f r im a c i ó n fo r z a d a > 2 3 A > 7~ APo t enc i a d e l m o to r ~I\' 1 . 1 h a , t a ~~5 1 .5 a 1 5 ~W ~.~ a 4 0 0
Pé r d id a s \\' 1 6 73 c nn 5 85 A , , 3 . 3 InC o nt en id o a rm ó ni co ,C a p a c i d a d d e a r r a ¡ ; ¡ ¡ ¡ i e \ 1 1 0 ' 0 3 \ 1 3 0 . 1 0 a h I 1 0 h o r a S I n 5 "M o d o s d e a r ra nq ueR am p a d e t ens ió n D eO .5 a6 0 s D c ~ a l~ s D e la 3 0 s
D eO A L :a U D e O ·O .S e a Ul ím i t e d e c o r r i e n t e 0 .5 a 5 Im o to r . lO ~Im nu l l o " b o o s t e r "M o d o s d e p ar ad aP a r a d a l i b r eR am p a d c t cns ió n D c I a I ~O ,
P a r a b o m b a s . r am na t e n s i ó n D e la l~O sInv e c c i ó n d e c cO l l l i nu aO p c ió n a h o r r o e n e r g é t ic o S I S IM o d o b y -p as sC o ne c l a b l e e n e l t r i á ng u loP r o t e c c i o ne sIn t e g r a d a m o t o r a r r a n c a d o rC a l e n t a m i e n to m o to r S IC a l e n t a m i e n t o m e d i oC a l e n t am i e n t o i n s t a n t á n e oF a l t a d e fa s e S I S I
D e s e a u i l i b r i o d e f a s eF a l l a r e f r i g e r a c i ó nC o r to c i r cu i t oS u b \ , o b r e t e n s i ó n d e r e dP i l o to s d e \ i s u a l iz a c ió n S I 9F a l loA larm aT en s i ó n t o t a l a p l i c a d a R o joM o to r e n s e r v i c io S I V er d eR e lé s d e sa l i d a
N ú m er o 2
P o t e nc ia d e e m p le o a 2 2 0 V V AIn t e n s id a d d e e m p l e o AD u r a c i ó n m e c á n i c aC o nd i c io nes am b i en t a le sM á x im a t em o c r a t u r a d e s e r v i c i o ·c 4 0 6 0M á x im a h u m e d a d d e s e r v i c i o 8 5M á x im a a l t i tu d s .n .m . m 1 0 0 0G r a d o d e P r o t e c c i ó n IP O O
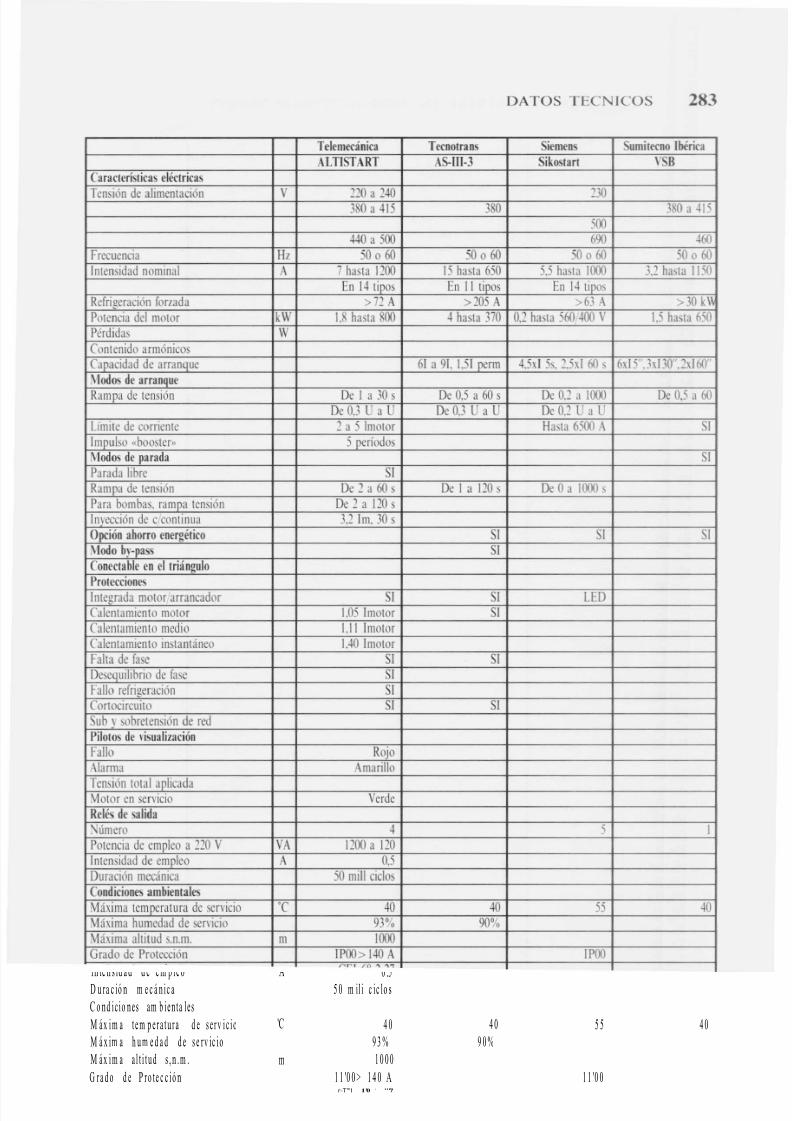
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 300/343
DATOS TECNICOS 283
T e l em ecá n i c a T e c n o t r a n s S i e m e n s S um i l e c n o Ib é r ic aA L T lS T A R T A 5 - I1 1 -3 S i k o s ta r t V S B
C a r a c t e r í s ti c a s e l é c t r i c a sT e n s ió n d e a l im e n ta c ió n V 21 0 a 24 0 23 0
3 8 0 a 4 1 5 3 8 0 3 80 a 4 1 55 0 0
4 4 0 a 5 0 0 6 9 0 4 6 0F r e c u e n c i a H z 5 0 0 6 0 5 0 0 6 0 5 0 0 6 0 5 0 0 6 0In t e n s i d a d no m in a l A 7 h a s t a 1 20 0 1 5 h a s ta 6 5 0 5 .5 h a s ta 1 0 0 0 3 .2 h a s ta 1 1 5 0
E n 1 4 t ip o s E n I1 t i p o s E n 1 4 t ip o sR e fr ig e r a c i ó n fo r z a d a > 72A > 2 0 5 A > 6 3 A > 3 0 k \Po t enc i a d e l m o to r k W 1 .8 h a sta 80 0 4 h a sta 3 7 0 0 .2 h as ta 5 6 0 4 0 0 V 1 .5 h as ta 6 5 0Pé rd i d as W
C o n t en id o arm ó n i co sC ap ac i d ad d e a r r an q u e 6 1 a 9 1 . 1 .5 1 p e rO l 4 .5 x l 5 s. 2.5 x l 6 0 s 6 x I5 ".3 x I3 0 ", 2x I6 O "M o d o s d e ar ran q ueR a m p a d e t e n s ió n D e la 3 0 s D e 0 .5 a 6 0 s D e 0 .2 a 1 0 0 0 D e 0 .5 a 6 0
D e O JU a U D e O JU a U D e O .2U a UL ím i te d e c o r r i e n t e 2 a 5 1 m o to r H a s t a 6 5 0 0 A S IIm p u ls o « b o o s t e r » 5 p e r ío d o sM o d o s d e p ar ad a S IP a r a d a l i b r e S IR am p a d e t e n s ió n D e 2 a 6 O s D e ta l 2 0 s D e O a 1 0 0 0 sP a r a b o m b a s . ra m p a te n s ió n D e 2 a l2 0 s
In y e c c i ó n d e c c o n t in u a 3 .2 1 0 1 .3 0 sO p c i ó n a h o r ro e n e r g é l ic o S I S I S IM o d o b y -p a s s S IC o n ec l a b l e en e l t r i án g u l oP r o t e c c i o n e sIl 1 l e g r a d a m o to r a r r a n c a d o r S I S I L E OC a le n ta m i e n to m o to r 1 .0 5 1 m o to r S IC a le n ta m i e n to m e d io 1 .I IIm o to rC a le n ta m i e n to i n s ta n tá n e o 1 .4 0 1m o to rF a l ta d e fa s e S I S ID e s e q u i l i b r i o d e f a s e S I
F a l lo r e f r ig e r a c ió n S IC o r to c i r c u i to S I S IS u b l s o b r e t en s i ó n d e r edPi lo lo s d e v i sua l i za c i ó nF al lo R o joA la rm a A m a r i l l oT en s i ó n t o t a l ap l i c ad aM o to r e n s e r v ic i o V e r d eR elé s d e sa l i d a;- .Jú m ero 4 5 1P o t e n c ia d e cm p le o a 2 20 V V A 1 20 0 a 1 20
1n te n s id a d d e em p le o A 0 .5D u ra c ió n m e c á n i c a 5 0 m i l i c i c lo sC o nd i c i o nes am b i en t a lesM áx im a t em p e r a t u r a d e s e r v i c i o 'C 4 0 4 0 5 5 4 0M á x im a h um e d a d d e s e rv ic i o 9 3 % 9 0 %M áx im a a l t i t u d s , n .m . m 1 0 0 0G r a d o d e P r o t e c c i ó n 1 1 '0 0 > 1 4 0 A 1 1 '0 0
r-T"'I 1'0 " 1 "'7
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 301/343
284 ARRANQUE I DUSTRIAL DI::. MOTORES ASINCRO OS
A B C D
C a r a r l e r í s l ir a s e l éw i r a sT en l i ó n d e a l im en t a c i ó n V
F r e c u e n c i a H I
I n t en s i d ad no m i n a l A
R eF r i g er a c i ó n F o rza d aPo t enc i a d e l m o to r k\\'
Pé rd i d as V I '
C o n t en id o arm ó n i co sC ap ac i d ad d e a r r an q u e~Io d o s d e ar r a nq ueR am p a d e t e l1 l i ó n
L ím i t e d e co r r i en t eIm p u ls o "b o o s t e r»~ Io d o s d e p ar ad aP a r a d a l i b r eR am p a d e t ens i ó nPa r a b o m b a \ . r am p a t en s i ó n
Iny ccc i ó n d e c co n t i n u aO p ci ó n ah o r ro ene rg é t i co~ lo d o b y -p a ssC o n e r t a b l e en e l t r i án g u l oP r o t e c c i o n e sIn t cg r ad a m o t o r a r r an c ad o rC a l en t a m i en t o m o t o rC a l en t am i en t o m ed IOC a l e n t am i c n t o i n s ta n t á n e oF a l t a d e F a l eD c s eq u i l i b r i o d e F a l e
F a l l o r eF r i g e r a c i ó nC o r t o cI r c u i t oS u b \ s o b r e t e n s i ó n d e r e dPi lo t o s d e \ i sua l i za r i ó nF al loA larm aT en s i ó n t o t a l ap l i c ad aM o to r en sm i c i oR elé s d e sa l i d a~ú m er oPo t cn c i a d e cm p i co a ~~OV V A
In t en s i d ad d e em p l eo AD u r a c i ó n m e c á n i c aC o nd i c i o nes am b i en t a lesM áx im a t em p e r a t u r a d e s em c l o 'C
M áx im a h um ed ad d e s en i c i oM á x im a a l t i t u d S .n .m . mG r ad o d e P r o t e c c i ó nDp";,'.o>n";" " "",\ • .• ..•"
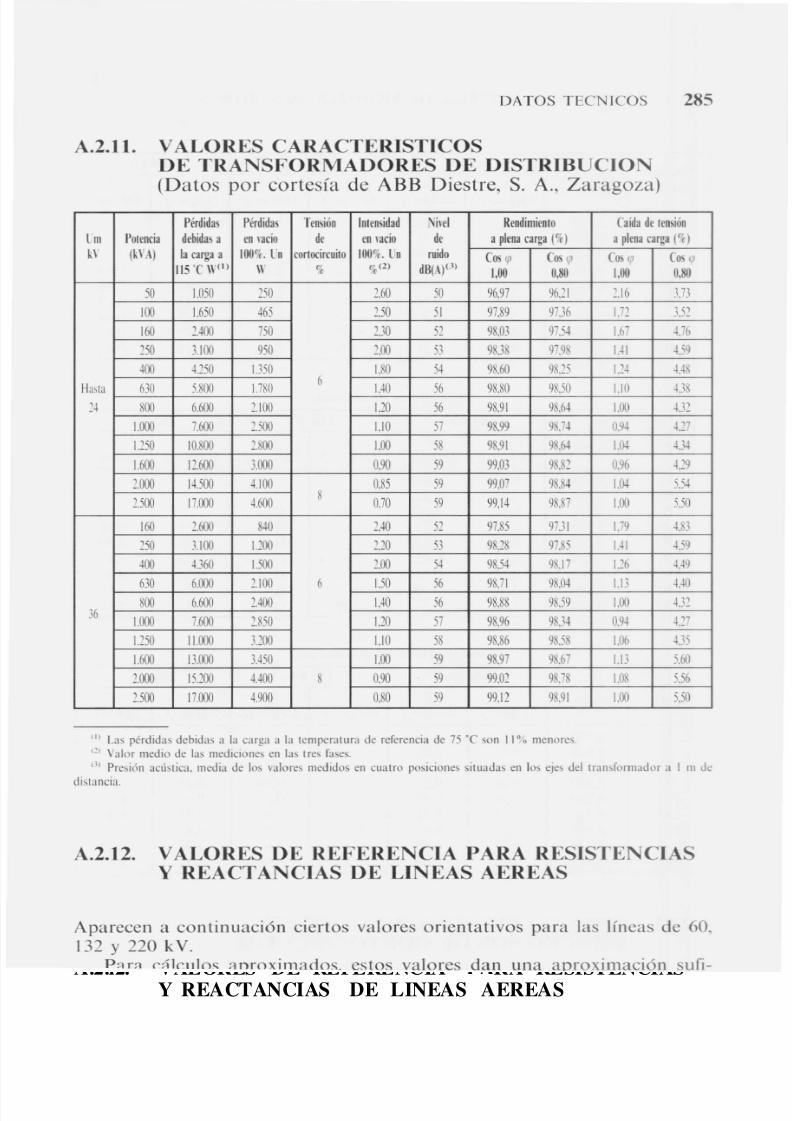
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 302/343
DATOS TECNICOS 285
A.2.l!. VALORES CARACTERISTICOS
DE TRANSFORMADORES DE DISTRIBUCIO(Datos por cortesía de ABB Diestre, S. A., Zaragoza)
P é r d i d a s P é r d i d a s T e n s i ó n I n l e n s i d a d N i l e l R e n d im i e n l o C a í d a d e t e n s i ó nL m P O l e n c i a d e b i d a s a e n l a d o d e e n l a d o d e a p l e n a c a r g a ('1 :) a p le n a c a rg a ('l)
k\ (k I'A ) la c a rg a a 1 0 0 '1 :. L n c o rt o c irc u ito 1 0 0 '1 :. L n ru id o C o s 'P C o s \l C o s 'P C o s < J
1 1 5 'C 1 1 '( 1 ) 1 1 ' \l 9c(2) d B (A )( J ) 1 ,0 0 0 ,8 0 1 ,0 0 O , S O
5 0 1 0 5 0 2 5 0 2 .6 0 5 0 9 6 .9 7 9 6 .2 1 2 .1 6 3 .7 3
1 0 0 1 6 5 0 4 6 5 2 .5 0 5 1 9 7 .8 9 9 7 .3 6 1 .7 2 3 .5 2
1 6 0 2 .- 1 0 0 7 5 0 2 .3 0 5 2 9 8 .0 3 9 7 .5 - 1 1 6 7 t7 6
2 5 0 3 .1 0 0 9 5 0 2 .0 0 5 3 9 8 .3 8 9 7 .9 8 I A I l5 9
4 0 0 ·1 2 5 0 1 3 5 0 1 8 0 5 4 9 8 .6 0 9 8 .2 5 1 2 - 1 4 .- 1 8
H al la 6 3 0 5 .8 0 0 1 .7 8 0 6
1 .4 0 5 6 9 8 .8 0 9 8 .5 0 1 1 0 4 .3 8
2 4 8 0 0 6 .6 0 0 2 1 0 0 1 .2 0 5 6 9 8 .9 1 9 8 .6 - 1 1 0 0 4 .3 2
1 0 0 0 7 .6 0 0 2 5 0 0 1 .1 0 5 7 9 8 .9 9 9 8 .7 4 0 .9 4 4 .2 7
1 2 5 0 1 0 .8 0 0 2 .8 0 0 1 0 0 5 8 9 8 .9 1 9 8 .6 - 1 1 0 4 4 .J - l
1 6 0 0 1 2 6 0 0 3 .0 0 0 0 .9 0 5 9 9 9 .0 3 9 8 .8 2 0 .9 6 4 .2 9
2 0 0 0 1 4 .5 0 0 4 1 0 0 0 .8 5 5 9 9 9 .0 7 9 8 .8 4 1 ,0 -1 5 .5 4
2 .5 0 0 1 7 .0 0 0 4 6 0 0 8
0 .7 0 5 9 9 9 .1 4 9 8 .8 7 1 0 0 5 .5 0
1 6 0 2 6 0 0 8 4 0 2 A O 5 2 9 7 .8 5 9 7 .3 1 1 7 9 - l .8 3
2 5 0 3 .1 0 0 1 2 0 0 2 .2 0 5 3 9 8 .2 8 9 7 .8 5 I A I 4 .5 9
4 0 0 4 3 6 0 1 5 0 0 2 .0 0 5 - 1 9 8 .5 4 9 8 .1 7 1 2 6 4 .4 9
6 3 0 6 0 0 0 2 .1 0 0 6 1 .5 0 5 6 9 8 .7 1 9 8 .0 4 1 .1 3 4 .4 0
8 0 0 6 .6 0 0 2 .4 0 0 1 ,4 0 5 6 9 8 .8 8 9 8 .5 9 1 0 0 4 3 23 6
1 0 0 0 7 .6 0 0 2 8 5 0 1 2 0 5 7 9 8 .9 6 9 8 .3 4 0 .9 4 4 .2 7
1 2 5 0 1 1 0 0 0 3 .2 0 0 1 .1 0 5 8 9 8 .8 6 9 8 .5 8 1 0 6 4 .J 5
1 6 0 0 1 3 .0 0 0 3 .4 5 0 1 0 0 5 9 9 8 .9 7 9 8 .6 7 1 .1 3 5 .6 0
2 .0 0 0 1 5 2 0 0 4 4 0 0 8 0 .9 0 5 9 9 9 .0 2 9 8 .7 8 1 0 8 5 .5 6
2 5 0 0 1 7 0 0 0 4 9 0 0 0 .8 0 5 9 9 9 .1 2 9 8 .9 1 1 .0 0 5 .5 0
'11 L a s pé rd id a s de b ida s a l a c a rga a l a t em pe ra t u ra d c r e fe r en c ia d e 7 5 " C s o n 1 1 00 m enores.
' " V a l o r m e d io d e l a s m e d ic i o n es cn l a s t re s f a se s .1 ', P r e sión a cú st i ca . m e d ia d e l o s v a l o r e s m ~d ido s e n cua tr o po s ic i o n es s il U ada s e n l o s e je s d el t r an sf o rm ado r a 1 m d~
dis tancia.
A.2.l2. VALORES DE REFERENCIA PARA RESISTENCIASY REACTANCIAS DE LINEAS AEREAS
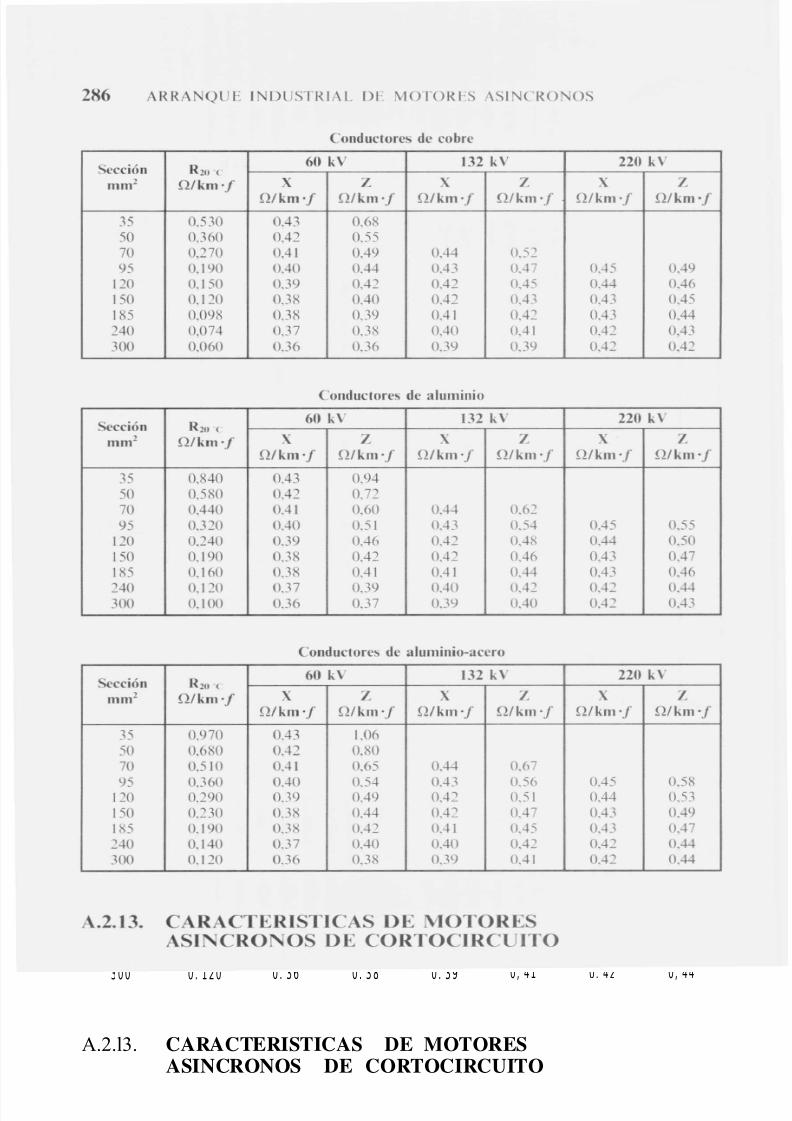
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 303/343
286 ARRANQUE INDUSTRIAL DF MOTORES ¡\SINCRONOS
Conductores de cobre
Sección R ZH e
60 kV 132 kV 220 kV
mmz O/km'! X Z X Z X Z
O/km·! O/km·! O/km'! O/km'! O/km'! O/km'!
3 5 0 . 5 3 0 0 , 43 0 . 68
5 0 0 , 360 0 , 42 0 . 557 0 0 . 270 0 , 41 0 , 49 0 . 4 4 0 . 5 2
9 5 0 . 190 0 , 40 0 , 44 0 , 43 OA7 O A 5 0 , 49
1 2 0 0 . 1 5 0 0 . 3 9 0 . 4 2 0 , 42 0 . 45 O A - t 0 , 46
1 5 0 0 . 1 2 0 0 , 38 0 , 4 0 0 , 4 2 0 , 43 0 , 4 3 0 , 4 5
1 8 5 0 . 0 9 8 0 , 38 0 . 39 0 , 4 1 0 , 4 2 0 , 4 3 0 , 4 4
2 4 0 0 . 074 0 , 37 0 . 38 0 , 4 0 0 , 4 1 0 , 4 2 0 , 4 3
3 0 0 0 . 0 6 0 0 . 3 6 0 . 3 6 0 . 3 9 0 . 3 9 0 , 4 2 0 , 4 2
Conductores de aluminio
Sección RZH (
60 kV 132 kV 220 kV
mmz O/km'! X Z X Z X Z
O/km'! O/km'! O/km·! O/km-! O/km-! O/km-!
3 5 0 . 8 4 0 0 , 43 0 . 94
5 0 0 . 580 0 , 42 0 . 72
7 0 0 , 440 0 , 41 0 . 60 OA-t 0 . 62
9 5 0 , 320 0 , 40 0 . 5 1 OA3 0 . 5 4 0 , 4 5 0 . 55
1 2 0 0 . 2 4 0 0 . 3 9 0 , 4 6 0 , 4 2 0 , 4 8 0 , 44 0 . 50
1 5 0 0 , 1 9 0 0 , 3 8 0 , 4 2 0 , 4 2 0 , 4 6 0 , 4 3 0 , 47
1 8 5 0 , 160 0 . 38 0 , 4 1 0 , 4 1 0 , 4 4 0 , 4 3 0 , 4 6
2 4 0 0 . 1 2 0 0 . 3 7 0 . 39 0 , 40 OA2 0 , 42 0 , 44
3 0 0 0 . 1 0 0 0 . 3 6 0 , 3 7 0 , 3 9 0 , 4 0 0 , 4 2 0 , 4 3
Conductores de aluminio-acero
Sección RZH (
60 kV 132 kV 220 kV
mmz O/km'! X Z X Z X Z
O/km"! O/km'! O/km·! O/km-! O/km -,[ O/km'!
3 5 0 . 9 7 0 0 , 43 1 . 06
5 0 0 . 680 0 , 42 0 . 80
7 0 0 . 5 1 0 0 , 41 0 . 65 0 , 44 0 . 67
9 5 0 . 3 6 0 OAO 0 . 54 0 , 43 0 . 56 0 , 45 0 , 58
1 2 0 0 , 290 0 . 39 0 , 49 0 , 42 0 . 51 0 , 44 0 . 53
1 5 0 0 , 230 0 . 38 0 , 4 4 0 , 4 2 0 , 4 7 0 , 4 3 0 , 4 9
1 8 5 0 , 190 0 . 38 0 , 42 OA I 0 , 4 5 0 , 4 3 0 , 47
2 4 0 0 . 140 0 . 37 0 , 40 OAO 0 . 42 0 , 42 0 . 44
3 0 0 0 . 1 2 0 0 . 3 6 0 . 3 8 0 . 3 9 0 , 41 0 . 42 0 , 44
A.2.l3. CARACTERISTICAS DE MOTORESASINCRONOS DE CORTOCIRCUITO
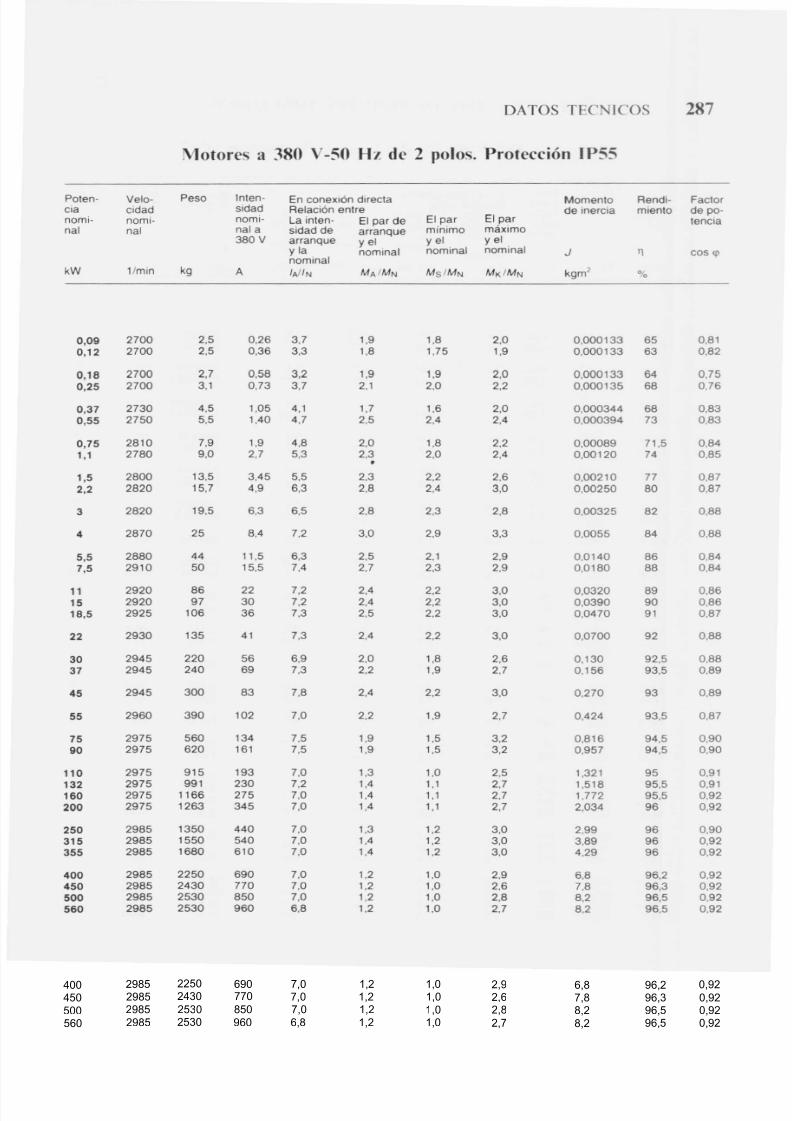
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 304/343
DATOS TECNICOS 287
Motores a 380 V-50 Hz de 2 polos. Protección IP55
Poten- Velo- Peso lnten- En conexión directa Momento Rendi- Factor cla cldad sidad Relación entre de Inercia miento de po-nomi· nomi· nomi- La inten- El par de El par El par tencianal nal nal a sidad de arranque mínimo máximo
380 V arranque yel yel yely la nominal nominal nominal J ~ cos <pnominal
kW l/min kg A 'A/IN MA/MN MslMN MK/MN kgm' %
0,09 2700 2,5 0,26 3,7 1,9 1,8 2,0 0,000133 65 0,81
0,12 2700 2,5 0,36 3,3 1,8 1,75 1,9 0,000133 63 0,82
0,18 2700 2,7 0,58 3,2 1,9 1,9 2,0 0,000133 64 0,75
0,25 2700 3,1 0,73 3,7 2,1 2,0 2,2 0,000135 68 0,76
0,37 2730 4,5 1,05 4,1 1,7 1,6 2,0 0,000344 68 0,83
0,55 2750 5,5 1,40 4,7 2,5 2,4 2,4 0,000394 73 0,83
0,75 2810 7,9 1,9 4,8 2,0 1,8 2,2 0,00089 71,5 0,84
1,1 2780 9,0 2,7 5,3 2,3 2,0 2,4 0,00120 74 0,85.1,5 2800 13,5 3,45 5,5 2,3 2,2 2,6 0,00210 77 0,87
2,2 2820 15,7 4,9 6,3 2,8 2,4 3,0 0,00250 80 0,87
3 2820 19,5 6,3 6,5 2,8 2,3 2,8 0,00325 82 0,88
4 2870 25 8,4 7,2 3,0 2,9 3,3 0,0055 84 0,88
5,5 2880 44 11,5 6,3 2,5 2,1 2,9 0,0140 86 0,84
7,5 2910 50 15,5 7,4 2,7 2,3 2,9 0,0180 88 0,84
11 2920 86 22 7,2 2,4 2,2 3,0 0,0320 89 0,86
15 2920 97 30 7,2 2,4 2,2 3,0 0,0390 90 0,86
18,5 2925 106 36 7,3 2,5 2,2 3,0 0,0470 91 0,87
22 2930 135 41 7,3 2,4 2,2 3,0 0,0700 92 0,88
30 2945 220 56 6,9 2,0 1,8 2,6 0,130 92,5 0,88
37 2945 240 69 7,3 2,2 1,9 2,7 0,156 93,5 0,89
45 2945 300 83 7,8 2,4 2,2 3,0 0,270 93 0,89
55 2960 390 102 7,0 2,2 1,9 2,7 0,424 93,5 0,87
75 2975 560 134 7,5 1,9 1,5 3,2 0,816 94,5 0,90
90 2975 620 161 7,5 1,9 1,5 3,2 0,957 94,5 0,90
110 2975 915 193 7,0 1,3 1,0 2,5 1,321 95 0,91
132 2975 991 230 7,2 1,4 1,1 2,7 1,518 95,5 0,91
160 2975 1166 275 7,0 1,4 1,1 2,7 1,772 95,5 0,92
200 2975 1263 345 7,0 1,4 1,1 2,7 2,034 96 0,92
250 2985 1350 440 7,0 1,3 1,2 3,0 2,99 96 0,90
315 2985 1550 540 7,0 1,4 1,2 3,0 3,89 96 0,92
355 2985 1680 610 7,0 1,4 1,2 3,0 4,29 96 0,92
400 2985 2250 690 7,0 1,2 1,0 2,9 6,8 96,2 0,92
450 2985 2430 770 7,0 1,2 1,0 2,6 7,8 96,3 0,92
500 2985 2530 850 7,0 1,2 1,0 2,8 8,2 96,5 0,92
560 2985 2530 960 6,8 1,2 1,0 2,7 8,2 96,5 0,92
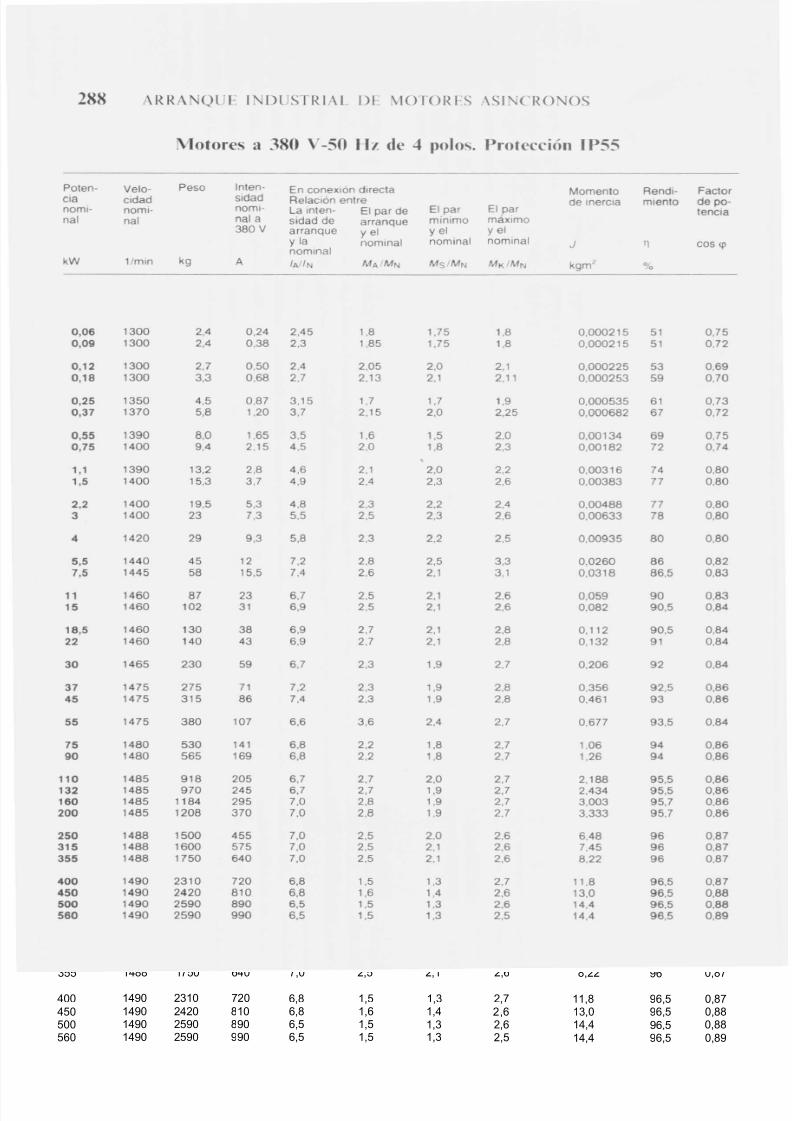
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 305/343
2SS ARRANQUE INDUSTRIAL DI:: MOTORES !\SINCRONOS
Motores a 380 V-50 Hz de 4 polos. Protección IP55
Poten- Velo- Peso Inten- En conexlon directa Momento Rendl- Factor cla cldad sldad Relación entre de InerCia miento de po-noml- ncml· nOffil- La Inten- El par de El par El par tenclanal nal nal a sldad de arranque mlnlffiO máXimo
380 V arranque yel yel yely la nominal nomInal nominal
J ~ cos c pnominal
kW l/mln kg A 'A "N MA MN MS,MN M K/M N kgm' 0'0
0,06 1300 2,4 0,24 2,45 1,8 1,75 1,8 0,000215 51 0,75
0,09 1300 2,4 0,38 2,3 1,85 1,75 1,8 0,000215 51 0,72
0,12 1300 2,7 0,50 2,4 2,05 2,0 2,1 0,000225 53 0,690,18 1300 3,3 0,68 2,7 2,13 2,1 2,11 0,000253 59 0,70
0,25 1350 4,5 0,87 3,15 1,7 1,7 1,9 0,000535 61 0,73
0,37 1370 5,8 1,20 3,7 2,15 2,0 2,25 0,000682 67 0,72
0,55 1390 8,0 1,65 3,5 1,6 1,5 2,0 0,00134 69 0,750,75 1400 9,4 2,15 4,5 2,0 1,8 2,3 0,00182 72 0,74
1,1 1390 13,2 2,8 4,6 2,1 2,0 2,2 0,00316 74 0,801,5 1400 15,3 3,7 4,9 2,4 2,3 2,6 0,00383 77 0,80
2,2 1400 19,5 5,3 4,8 2,3 2,2 2,4 0,00488 77 0,80
3 1400 23 7,3 5,5 2,5 2,3 2,6 0,00633 78 0,80
4 1420 29 9,3 5,8 2,3 2,2 2,5 0,00935 80 0,80
5,5 1440 45 12 7,2 2,8 2,5 3,3 0,0260 86 0,827,5 1445 58 15,5 7,4 2,6 2,1 3,1 0,0318 86,5 0,83
11 1460 87 23 6,7 2,5 2,1 2,6 0,059 90 0,8315 1460 102 31 6,9 2,5 2,1 2,6 0,082 90,5 0,84
18,5 1460 130 38 6,9 2,7 2,1 2,8 0,112 90,5 0,8422 1460 140 43 6,9 2,7 2,1 2,8 0,132 91 0,84
30 1465 230 59 6,7 2,3 1,9 2,7 0,206 92 0,84
37 1475 275 71 7,2 2,3 1,9 2,8 0,356 92,5 0,8645 1475 315 86 7,4 2,3 1,9 2,8 0,461 93 0,86
55 1475 380 107 6,6 3,6 2,4 2,7 0,677 93,5 0,84
75 1480 530 141 6,8 2,2 1,8 2,7 1,06 94 0,8690 1480 565 169 6,8 2,2 1,8 2,7 1,26 94 0,86
110 1485 918 205 6,7 2,7 2,0 2,7 2,188 95,5 0,86132 1485 970 245 6,7 2,7 1,9 2,7 2,434 95,5 0,86160 1485 1184 295 7,0 2,8 1,9 2,7 3,003 95,7 0,86200 1485 1208 370 7,0 2,8 1,9 2,7 3,333 95,7 0,86
250 1488 1500 455 7,0 2,5 2,0 2,6 6,48 96 0,87315 1488 1600 575 7,0 2,5 2,1 2,6 7,45 96 0,87
355 1488 1750 640 7,0 2,5 2,1 2,6 8,22 96 0,87
400 1490 2310 720 6,8 1,5 1,3 2,7 11,8 96,5 0,87450 1490 2420 810 6,8 1,6 1,4 2,6 13,0 96,5 0,88500 1490 2590 890 6,5 1,5 1,3 2,6 14,4 96,5 0,88560 1490 2590 990 6,5 1,5 1,3 2,5 14,4 96,5 0,89
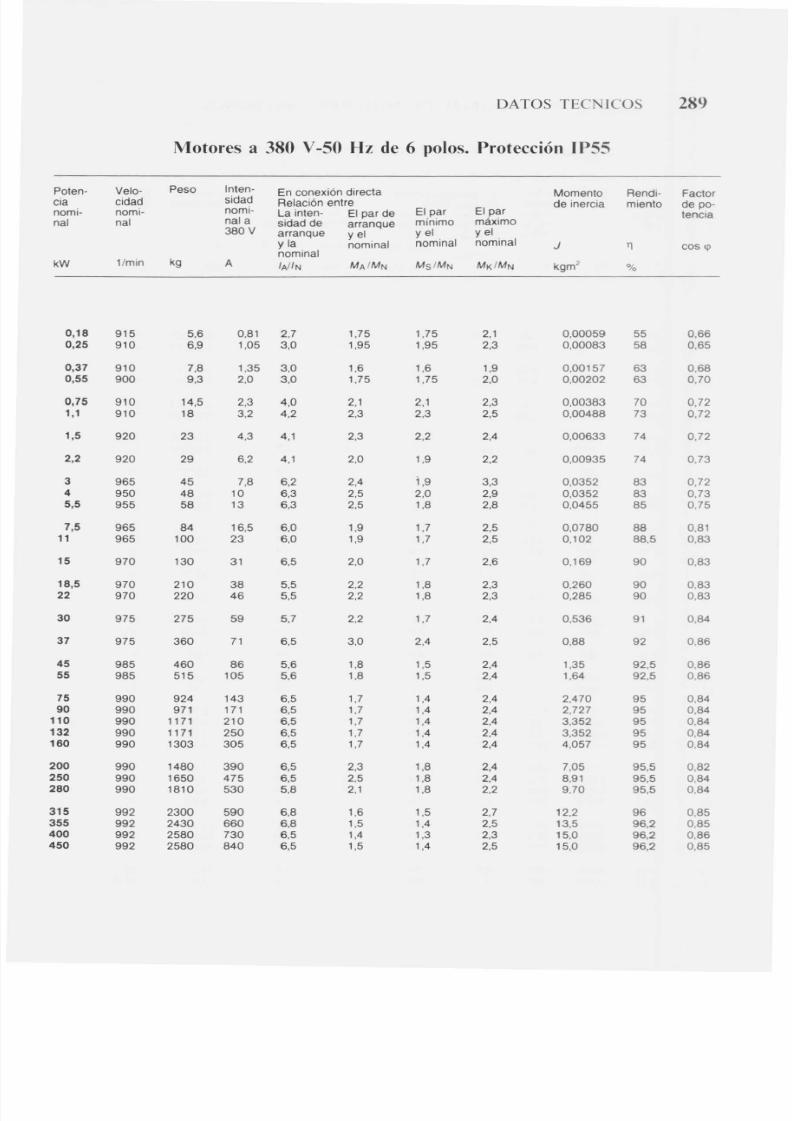
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 306/343
DATOS TECNICOS 289
Motores a 380 V-50 Hz de 6 polos. Protección IP55
Poten- Velo- Peso Inten- En conexión directa Momento Rendi- Factor c ia cidad sidad Relación entre de inercia miento de po-nomi· nomi- nomi- La inten- Elparde El par El par tencianal nal nal a sidad de arranque mínimo máximo
380 V arranque yel yel yely la nominal nominal nominal J ~ cos < ¡ >nominal
kW l/min kg A IAIIN MA/MN Ms/MN MKIMN kgm' %
0,18 915 5,6 0,81 2,7 1,75 1,75 2,1 0,00059 55 0,66
0,25 910 6,9 1,05 3,0 1,95 1,95 2,3 0,00083 58 0,65
0,37 910 7,8 1,35 3,0 1,6 1,6 1,9 0,00157 63 0,680,55 900 9,3 2,0 3,0 1,75 1,75 2,0 0,00202 63 0,70
0,75 910 14,5 2,3 4,0 2,1 2,1 2,3 0,00383 70 0,721,1 910 18 3,2 4,2 2,3 2,3 2,5 0,00488 73 0,72
1,5 920 23 4,3 4,1 2,3 2,2 2,4 0,00633 74 0,72
2,2 920 29 6,2 4,1 2,0 1,9 2,2 0,00935 74 0,73
3 965 45 7,8 6,2 2,4 1,9 3,3 0,0352 83 0,724 950 48 10 6,3 2,5 2,0 2,9 0,0352 83 0,735,5 955 58 13 6,3 2,5 1,8 2,8 0,0455 85 0,75
7,5 965 84 16,5 6,0 1,9 1,7 2,5 0,0780 88 0,8111 965 100 23 6,0 1,9 1,7 2,5 0,102 88,5 0,83
15 970 130 31 6,5 2,0 1,7 2,6 0,169 90 0,83
18,5 970 210 38 5,5 2,2 1,8 2,3 0,260 90 0,8322 970 220 46 5,5 2,2 1,8 2,3 0,285 90 0,83
30 975 275 59 5,7 2,2 1,7 2,4 0,536 91 0,84
37 975 360 71 6,5 3,0 2,4 2,5 0,88 92 0,86
45 985 460 86 5,6 1,8 1,5 2,4 1,35 92,5 0,8655 985 515 105 5,6 1,8 1,5 2,4 1,64 92,5 0,86
75 990 924 143 6,5 1,7 1,4 2,4 2,470 95 0,8490 990 971 171 6,5 1,7 1,4 2,4 2,727 95 0,84
110 990 1171 210 6,5 1,7 1,4 2,4 3,352 95 0,84132 990 1171 250 6,5 1,7 1,4 2,4 3,352 95 0,84160 990 1303 305 6,5 1,7 1,4 2,4 4,057 95 0,84
200 990 1480 390 6,5 2,3 1,8 2,4 7,05 95,5 0,82250 990 1650 475 6,5 2,5 1,8 2,4 8,91 95,5 0,84280 990 1810 530 5,8 2,1 1,8 2,2 9,70 95,5 0,84
315 992 2300 590 6,8 1,6 1,5 2,7 12,2 96 0,85355 992 2430 660 6,8 1,5 1,4 2,5 13,5 96,2 0,85400 992 2580 730 6,5 1,4 1,3 2,3 15,0 96,2 0,86450 992 2580 840 6,5 1,5 1,4 2,5 15,0 96,2 0,85
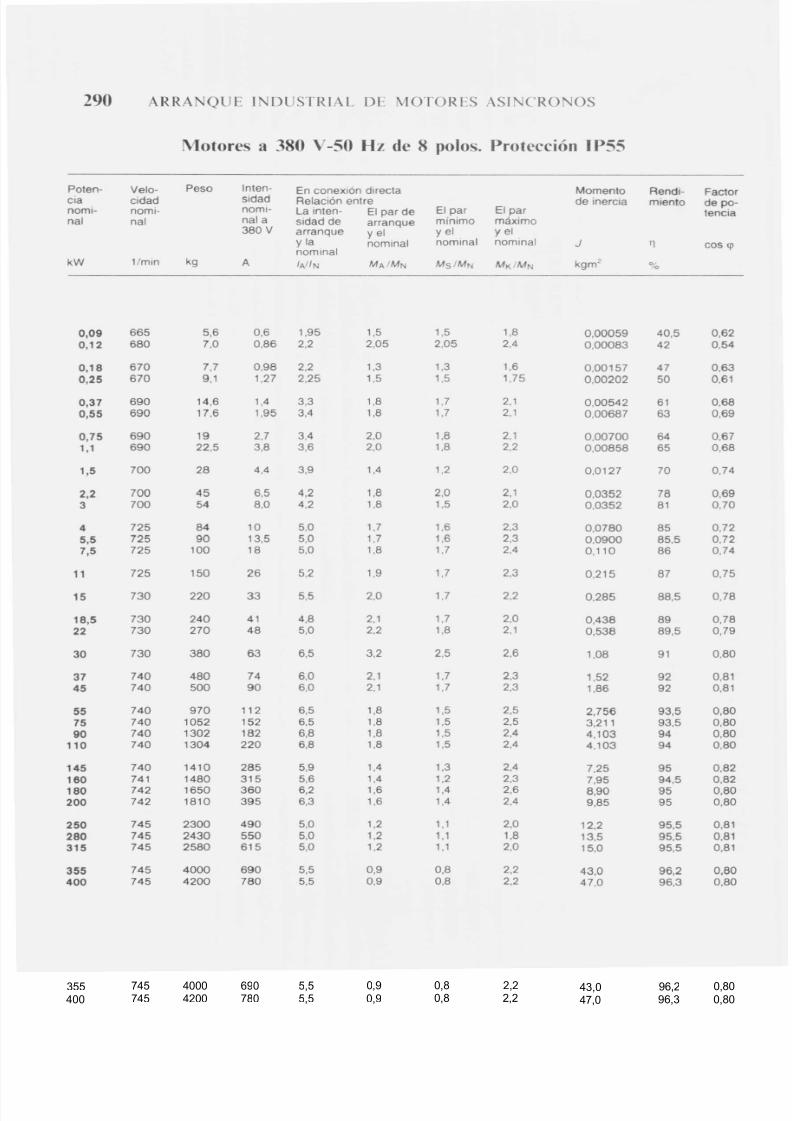
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 307/343
290 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Motores a 380 V-50 Hz de 8 polos. Protección IP55
Poten- Velo- Peso Inten- En conexión directa Momento Rendi- Factor Cla cldad SIdad Relación entre de InerCia miento de po-naml- naml- noml- La Inten- El par de El par El par tencianal nal nal a sldad de arranque mín im o m áxIm o
380 V arranque yel yel yely la nomInal nomInal nominal J ~ cos <pnominal
kW l/mln kg A lA/IN M A /M N M s/M N M K /M N kgm' 00
0,09 665 5,6 0,6 1,95 1,5 1,5 1,8 0,00059 40,5 0,62
0,12 680 7,0 0,86 2,2 2,05 2,05 2,4 0,00083 42 0,54
0,18 670 7,7 0,98 2,2 1,3 1,3 1,6 0,00157 47 0,630,25 670 9,1 1,27 2,25 1,5 1,5 1,75 0,00202 50 0,61
0,37 690 14,6 1,4 3,3 1,8 1,7 2,1 0,00542 61 0,68
0,55 690 17.6 1.95 3,4 1,8 1,7 2,1 0,00687 63 0,69
0,75 690 19 2,7 3.4 2,0 1,8 2,1 0,00700 64 0,671,1 690 22,5 3,8 3,6 2,0 1,8 2,2 0,00858 65 0,68
1,5 700 28 4,4 3,9 1,4 1,2 2,0 0,0127 70 0,74
2,2 700 45 6,5 4,2 1,8 2,0 2,1 0,0352 78 0,69
3 700 54 8,0 4,2 1,8 1,5 2,0 0,0352 81 0,70
4 725 84 10 5,0 1,7 1,6 2,3 0,0780 85 0,72
5,5 725 90 13,5 5,0 1,7 1,6 2,3 0,0900 85,5 0,72
7,5 725 100 18 5,0 1,8 1,7 2,4 0,110 86 0,74
11 725 150 26 5,2 1,9 1,7 2,3 0,215 87 0,75
15 730 220 33 5,5 2,0 1,7 2,2 0,285 88,5 0,78
18,5 730 240 41 4,8 2,1 1,7 2,0 0,438 89 0,78
22 730 270 48 5,0 2,2 1,8 2,1 0,538 89,5 0,79
30 730 380 63 6,5 3,2 2,5 2,6 1,08 91 0,80
37 740 480 74 6,0 2,1 1,7 2,3 1,52 92 0,81
45 740 500 90 6,0 2,1 1,7 2,3 1,86 92 0,81
55 740 970 112 6,5 1,8 1,5 2,5 2,756 93,5 0,80
75 740 1052 152 6,5 1,8 1,5 2,5 3,211 93,5 0,80
90 740 1302 182 6,8 1,8 1,5 2,4 4,103 94 0,80
110 740 1304 220 6,8 1,8 1,5 2,4 4,103 94 0,80
145 740 1410 285 5,9 1,4 1,3 2,4 7,25 95 0,82
160 741 1480 315 5,6 1,4 1,2 2,3 7,95 94,5 0,82
180 742 1650 360 6,2 1,6 1,4 2,6 8,90 95 0,80200 742 1810 395 6,3 1,6 1,4 2,4 9,85 95 0,80
250 745 2300 490 5,0 1,2 1,1 2,0 12,2 95,5 0,81
280 745 2430 550 5,0 1,2 1,1 1,8 13,5 95,5 0,81315 745 2580 615 5,0 1,2 1,1 2,0 15,0 95,5 0,81
355 745 4000 690 5,5 0,9 0,8 2,2 43,0 96,2 0,80400 745 4200 780 5,5 0,9 0,8 2,2 47,0 96,3 0,80
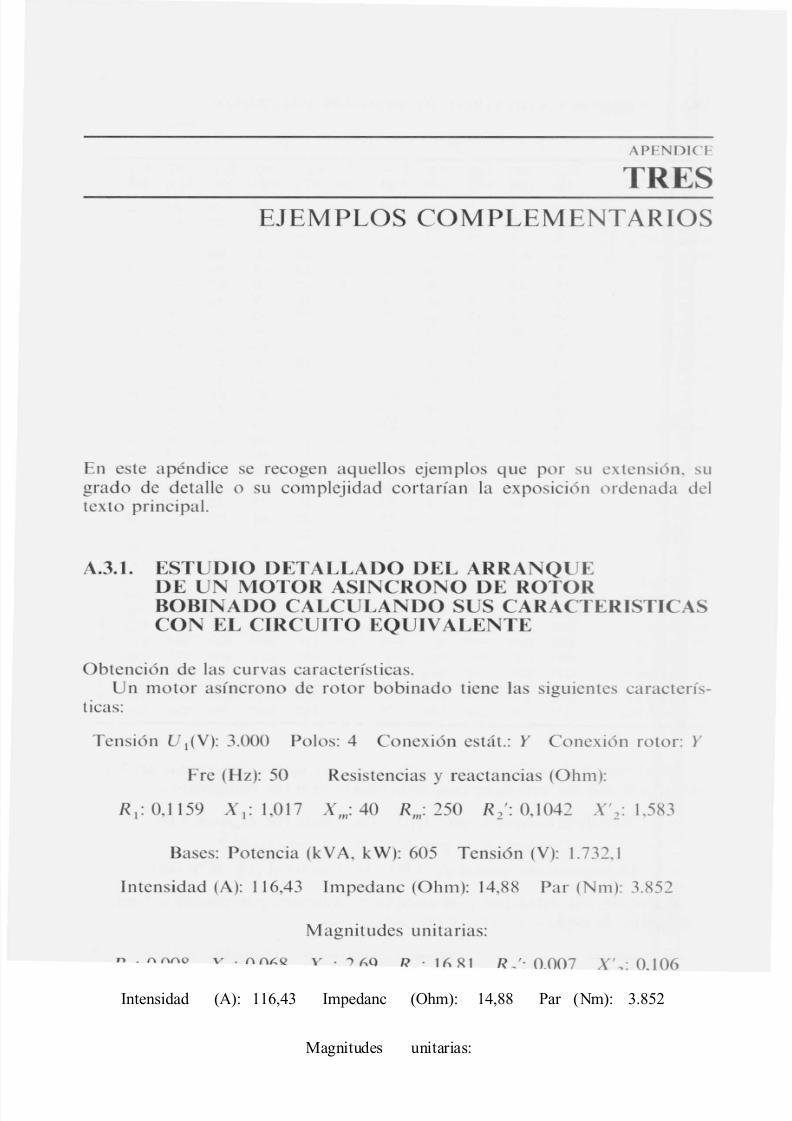
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 308/343
APE DICE
TRESEJEMPLOS COMPLEMENTARIOS
En este apéndice se recogen aquellos ejemplos que por su extensión, sugrado de detalle o su complejidad cortarían la exposición ordenada deltexto principal.
A.3.1. ESTUDIO DETALLADO DEL ARRANQUEDE UN MOTOR ASINCRONO DE ROTORBOBINADO CALCULANDO SUS CARACTERISTICASCON EL CIRCUITO EQUIVALENTE
Obtención de las curvas características.
Un motor asíncrono de rotor bobinado tiene las siguientes caracterís-ticas:
Tensión U 1 (Y): 3.000 Polos: 4 Conexión estát.: Y Conexión rotor: Y
Fre (Hz): 50 Resistencias y reactancias (Ohm):
R¡: 0,1159 X I: 1,017 X III: 40 R II I : 250 Rz ': 0,1042 X 'z: 1,583
Bases: Potencia (k YA, k W): 605 Tensión (Y): 1.732, I
Intensidad (A): 116,43 Impedanc (Ohm): 14,88 Par (Nm): 3.852
Magnitudes unitarias:
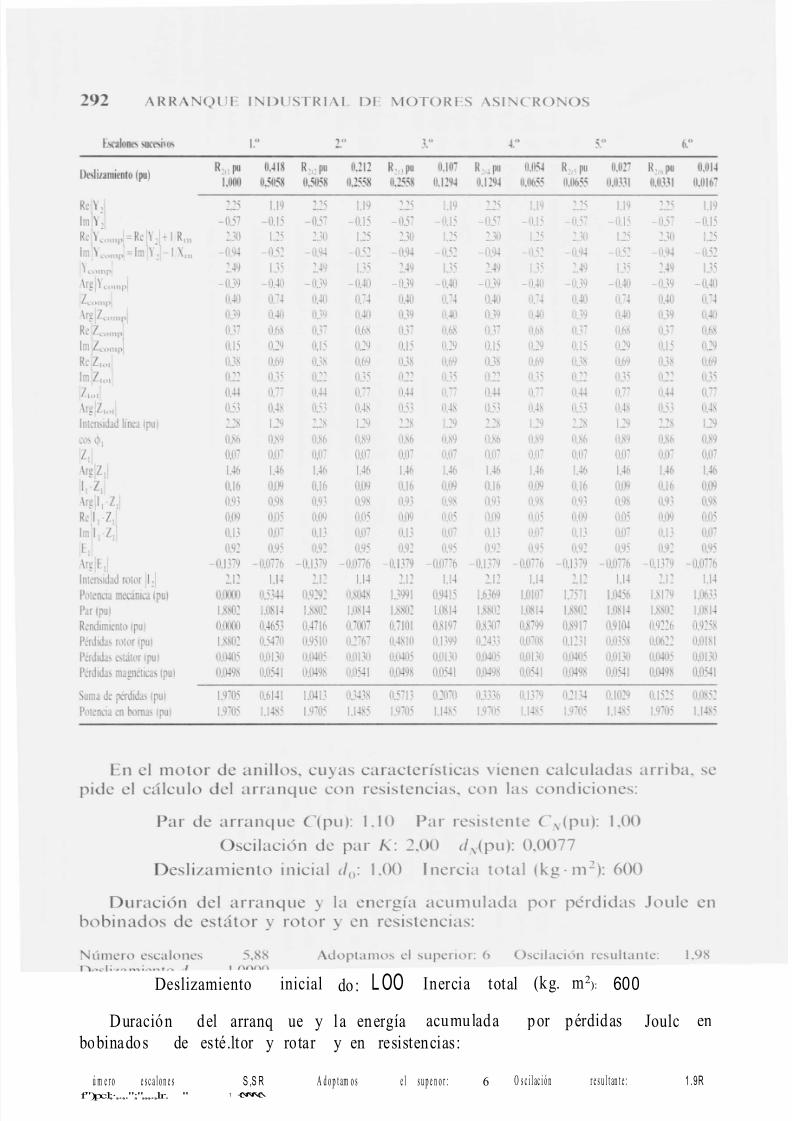
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 309/343
292 A R R A N Q U E IN D U S T R IA L DI- M O T O R E S A S I N C R O N O S
E s c a lo n l'S s o c l'S i lO '> 1 . 0 1 , 1 ' 3 , 0 t' 5 .u 6 .°
O l'S li L a m ie n lo( p u ) R ,,, p u o , m R " , p u 0 .2 1 2 R ,d p u 0 ,1 0 7 R 2 'lP U 0 ,1 I5 ~ R ,'ip u 0 ,0 2 7 R ./O p u 0 ,0 1 ~1 . 0 0 0 1 1 . 5 1 1 5 8 0 5 0 5 8 0 . 2 5 5 8 0 . 2 5 5 8 1 I . 1 1 9 ~ 0 ,1 1 9 ~ 0 .1 1 6 5 5 1 1 .0 6 5 5 0 ,0 3 .1 1 0 .0 3 3 1 0 ,0 1 6 7
R e ,I,. ~ . 2 5 1 1 9 ~.~5 1 1 9 ~ .~5 J .i9 ~.2' I I ~ 2 . 2 5 I I ~ 2 . 2 5 1 1 91 0 1
1 1 ' 1 - 0 5 7 -O .I S - O Y - O . I S - 0 5 7 I I . I S -(5 ) -1 1 1 S 0 5 - IW 1 1 5 7 - O . IS
R C I I " " " I '= k l ,l tl R " , 2 . 3 0 I . ; S ; ,0 I . ; S ;, 0 I . ; S :J O I . ; S 2 . 3 0 I . ; S 2 J O I . ; S
1 m 1 " ' ' ' '1 ' = 1 m 1 , - 1 \ " , 0 .9 ~ -0. '2 -0 .9 ~ -052 -O .9 ~ 0 5 ; 0 .9 ~ },' 0 .9 ~ '2 -0 .9 ~ 0 5 ;, 1,;,111111 ; ~ 9 1 . 3 5 ;'~ 9 1 . 3 5 ;.~ 9 U 5 ;.~ y 0 3 5 ; A 9 U 5 ; A 9 U S\ rg ' \ 1,;\ll1lpl 0 ,9 -O A O -1 1 .)9 O A O -0 ,9 - I I A O O J 9 I U O O J 9 O A O -O J 9 -O A Ol"'\llIIp IJ A O O .-~ IU O O .-~ O A O (n O A O I n O A O I n O A n I n\r g Zwmp 1 1 3 9 0 ..1 0 O..N O A O O..W O A O 1 1 .3 9 1 ) I O J 9 O A O 0 ..1 9 0 ..1 0
R e ZI,:OIllP a y O .ó ~ o .r O .ó ~ O Y O A S O Y O .h ~ o .r 0 .6 ~ 0 .3 " 0 .6 ~
1 m LOlll pl O .IS 0 ; 9 O .IS 0 ; 9 0 .1S 0 ;9 0 .1 5 0 ; 9 O .IS 0 ;9 (W 0 ;9R t : I Z IIlI I l J ~ 0 .ó 9 O J ~ 0 .ó 9 I l J ~ 0 .ó 9 O J ~ 0 .ó 9 0 7 ~ 0 .ó 9 0 ..1 1 0 .6 9Im 'Z ,,,, O . ; ; 0 . 3 5 O . : : 0 . 3 5 O , : : o y ) J . : : 1 1 . \ ' 0 .1 ; 0 . . 1 5 o . ; ; t l . 3 5
7, , , , (W 0 .-- ( W 1 1 , : ' O A ~ O ." ' O A ~ 0 .-- (U ~ 0 .-- O .~ O ." '\rg2 lPI O 's J O A \ 0 5 .' (lA \ O . 5 J (IA X 0 5 J O A \ n , 5 3 O A \ 0 . 5 3 O A sIn tc n ' ld a d lín e a Ip U I :.:~ 1 .1 9 : .2 , 1 .;9 :~s 1 .1 9 :.:~ 1 .2 9 : . : , \ .1 9 :,) 1 .1 9úh L)¡ 0 .1 6 1 1 .~ 9 O .~ ó 0 . \ 9 O .~ Ó o .~ 9 O .IÓ 1 1 .~ 9 0 .~ 6 1 1 .~ 9 O . \Ó 0 . \ 9
Z ,I 0 .0 ' 0 .0 7 0 .0 ' 0 .0 ; O J l1 0 .0 ' 0 .0 ; 0 J 1 7 0 . 1 1 7 0 .0 ; 0 . 0 ; 0 .0 7Ir g 'Z " U 6 I A 6 U 6 U 6 U Ó U 6 U 6 U ó U 6 I A 6 IA 6 U 61 Z 0 .1 6 o .m 0 .1 6 o m 0 .1 6 O J ! 9 O . ló 0 .1 l 9 0 .1 6 O J ! 9 1 \ .1 6 0 .0 9~ rg 1 , Z ,! 0 .9 .7 0 .% 0 .9 .' 0 .9 \ 0 .9 .' 0 .% 0 .9 .' 0 .9 \ 0 .9 .' 0 .9 \ 0 .9 .' 0 .9 \
R c I,'Z , 0 .(! 9 O .O S O . l ! 9 O .O S 0 .1 1 9 O .O S O . l l 9 O .O S o m O .O S 0 .(! 9 O .O S1 m 1 Z 0 .1 .' o , r r 0 .1 .' 0 .0 - 0 .1 .' 1 1 .1 0 .1 . 7 1 I .l r 0 1 .' 0 .0 - 0 .1 .' 0 .0 -
E , 0 .9 ; 0 .9 i 0 .9 1 0 .9 i 0 .9 ; 0 .9 i 0 .9 1 0 .9 . i 0 .y 1 0 .9 ' 0 .9 1 0 .9 SI r g E , ! - ( 1 . 1 3 : 9 -0 .0 7 7 6 -0 .1 .1 1 9 - 0 . 0 7 7 6 0 . 1 3 7 9 -0 .1 )'1 6 -0 .1 .7 7 9 -0 .0 - '6 -0 .1 .1 1 9 -0 .0 7 7 6 -1 1 .1 .1 7 9 -0 .0 i7 6In IC n ' ld a d ro lo r 1 " :.1 ; I I ~ 1 .1 : I . I ~ : .1 : W ;.1 1 I I ~ 2 .1 2 I I ~ :.1 ; I I ~P n le n (l a m e c a m c a Ip u l O .lX 'O O 0 5 .'~ 0 .9 ;9 ; O . \W \ 1 . 3 9 9 1 0 . 9 ~ I S L ó .'ó 9 L O llr l. -s-¡ L O N L ln L ~ .'.'P a r Ip U I L X S 0 2 L O S I ~ m o ; L O \ I~ L S S 0 2 L O \ I~ I , S S O : L O \ I ~ L X S 0 2 L O \ I ~ L " f1 2 L O \I~R c n d lm l c ll\ o (p u l O .lX 'O O O A 6 S . ' O A 7 1 6 0 . 7 0 0 ' 0 . 7 1 0 1 0 .8 1 9 7 0 .8 .'0 7 0 .8 '9 9 0 .8 9 1 1 0 .9 1 W 0 . 9 : : 6 0 . 9 : S XP ird ld a s fl l lO r Ip u l L X X O ; 0 5 ~ 'O 0 . 9 S 1 0 0 . 2 T O A S IO 0 .1 1 9 9 0 .2 ·0 3 0 .0 -0 1 0 . 1 ; . '1 O . O . 'S \ O . ~ : : 0 .0 1 \1P c r d l d a , c , lá t o r I p U I O . W O S 0 .0 1 .'0 O M O ' 0 . 0 1 . ' 0 1 l . l \ . l l l 5 0 . 0 1 . 7 0 O . 1 S O J I1 .7 1 1 O .W O i 0 .0 1 3 0 O .l l1 Il i 0 .0 1 .'0P i rd l d a , m a g n é l lm I p U I O M \ (J .0 5 ~ 1 0 .W 9 \ (} .O S ~ I O .W % (} .O S ~ I O .m 9 X O .O i~ 1 O M s O .O ~ I O ,W % O .O S ~ I
S u m a d , p é rd id a s Ip u l 1 . 9 ' 0 5 0 . 6 1 ~ 1 I .W I . 1 O . . 7 ~ . 1 X 0 . 5 ' 1 1 0 . 2 0 ' 0 0 , 3 3 3 6 0 .J r9 0 .:1 .7 ~ 0 . 1 1 I : 9 O . l S ; 5 0 . O S 5 :P " le n c la c n N 1 m a \ Ip U I I .r o s I .I ~ I ' 1 .9 '0 5 1 I ~ \ 5 L f i l 5 1 I ~ ~ 5 I . r l l ' .I N L fi l 5 I . I ~ I ' L f llS 1 .I ~ l i
En el motor de anillos, cuyas características v ienen calculadas arriba, se pide el cé.llculo del arranque con resistencias, con las condiciones:
Par de arranq ue C(pu): 1.10 Par resistente C \ (pu): 1,00
Oscilación de par K : 2,00 dv(pu): 0,0077
Deslizamiento inicial do: L OO Inercia total (kg. m2): 600
Duración del arranq ue y la energía acumulada por pérdidas Joulc en bobinados de esté.ltor y rotar y en resistencias:
ú m e r o e s c a l o n e s S ,S R A d o p t a m o s e l s u p e n o r : 6 O s c i l a c i ó n r e s u l t a n t e : 1 .9Rf")pcl;·,.,.";",,,.,lr. " 1 {\f\f\{\

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 310/343
EJEMPLOS COMPLEMENTARIOS 293
1 .0 0 0 ) 0 .5 0 5 8 0 .i0 5 8 0 .25 5 8 0 .25 5 8 0 .1 29 4 0 .1 29 4 0 ,0 6 5 5 0 ,0 6 5 5 0 .0 3 3 1 0 .0 )3 1 0 .0 1 6 70 . 0 0 77 . 6 3 77 . 6 3 1 1 6 . 8 9 1 1 6 . 8 9 1 )6 .7 5 1 )6 .7 5 1 -1 6 .80 1 -1 6 .80 1 5 1 .88 1 5 1 .88 1 5 -l.- l5
72 -1 2.0 4 1 6 5 .0 72 -1 2.0 -1 1 6 5 .0 72- 1 2.0 -1 1 6 5 .0 72 -l2.0 4 1 6 5 .0 72- 1 2.0 -1 1 6 5 .0 1 2-1 2.0 -1 1 6 5 .03 85 2 .0 3 85 2 .0 3 85 2 .0 3 5 2 .0 3 85 2 .0 3 85 2 .0 .1 85 2 .0 .1 85 2 .0 3 85 2 .0 3 85 2 .0 3 85 2 .0 .1 85 2 .0.1 .1 9 0 .0 m .o 3 .1 9 0 .0 .1 1 -1 ,0 .1 3 9 0 .0 3 1 4 .0 .1 3 9 0 .0 3 1 4 .0 3 .1 9 0 .0 m o 3 3 9 0 .0 J I - l .O
J3 9 0 9 4 7 2 2 1 4 9 6 4 5 26 9 9 22 6 9 1 85 1 9 1
-4 0 -7 8 -1 5 5 -.1 0 6 -6 0 5 -1 1 9 73 6 .0 3 7 1 8 .2 1 7 9 .22 0 4 .6 6 .1 2 ..1 5 9 1 .1 9 .13 6 .0 3 7 5 - \ .2 6 -1 6 .1 .- l 8 - l 6 8 .1 -1 7 70 .5 0 6 1 1 .6 9 9
2 4 7 . 0 1 3 3 . 0 2 4 7 . 0 m . o 2 4 7 . 0 1 3 3 . 0 2 4 7 , 0 1 3 3 . 0 2 4 7 , 0 1 3 3 . 0 2 - 1 7 . 0 1 3 3 . 02 4 7 .0 24 7 .0 2 4 7 ,0 24 7 ,0 2 4 7 .0 2 4 7 .0
- .1 .1 6 -6 .2 4 -1 2 ..1 3 - 24 . .1 8 -4 8 .2 1 -9 5 . .1 0 T o ta l6 .9 -1 7 0 1 .7 7 3 0 .4 5 -\7 0 .1 1 6 3 0 .0 2 9 0 .0 0 7 6 9 . .1 3 270 .1 1 6 .1 0 .0 5 8 0 .0 2 9 8 0 .0 1 5 1 0 .0 0 76 0 .0 0 .1 9 0 .2 3 1 56 .8 .1 0 7 1 .7 1 8 5 0 .4 2 4 9 0 .1 0 1 3 0 ,0 2 21 0 .0 0 3 8 9 .1 0 1 )
2 6 5 , 0 1 5 0 . 0 2 6 5 . 0 1 5 0 . 0 2 6 5 . 0 1 5 0 . 0 2 6 5 , 0 1 5 0 . 0 2 6 5 , 0 1 5 0 . 0 2 6 5 , 0 1 5 0 , 026 5 .0 2 6 5 .0 2 6 5 .0 26 5 .0 2 6 5 .0 26 5 .0
- .1 .1 9 -6 . .1 0 -1 2 .4 6 -2 4 .6 -1 - -1 8 .7 2 -9 6 .3 20 .1 5 - \2 0 .0 7 80 0 .0 3 9 5 0 .0 20 0 0 .0 1 0 1 0 .0 0 5 1 0 . .1 0 6 9
Deslizamiento dI
Deslizamiento d4
Deslizamiento d 5
Deslizamiento d6 Deslizamienlo d "
C á lc u lo d e l a rr a n q u eD e s li/ a m ie n lo (p u lV e lo c id a d a n g u la r Ir a d lP a r m o to r IN m lP a r re s is te n te IN m lP a r a c e le ra d o r IN m lC o n s ta n te A
C o n s ta n te BIn c re m e n to d e t i e m p o (s )T ie m p o a c u m u la d o Is lIn te n s id a d ro ta r lA !C o n s ta n te CC o n s ta n te DE n e rg ía c irc o r o lO r Ik W h lE n e rg ía b o b in a ro lO r Ik I V h lE n e rg ía re s is te n c ia s Ik lV h lIn te n s id a d e s tá to r (A !C o n s ta n te EC o n s ta n te FE n e rg ía b o b in a e s tá to r (k \\ 'h l
0.1294
0.0655
0,03310,0167
0,0085
Resistencia adicional R "dJ
Resistencia adicional R"M
Resistencia adicional R " d 5Resistencia adicional R"d6
14.28 veces la del 1'0101'
6,73 veces la del 1'0101'
2.91 veces la del 1'0101'
0,98 veces la del 1'0101'
Los resultados de los cálculos del arranque de este motor se han resumi-do en el Apartado 3.2.1 y en la Figura 3.19.
A.3.2. ESTUDIO DETALLADO DEL ARRA QUEDE UN MOTOR ASINCRONO DE CORTOCIRCUITOCON RESISTENCIAS EN EL ESTATOR
U n motor asíncrono de rotar en cortocircuito tiene las siguientes caracterís-ticas:
Tensión U I(Y): 380 Polos: 4 Conexión estát.: Y Fre (Hz): 50
Resistencias y reactancias (Ohm):
R¡: 0,270 X I: 0,80 X",: 35 R",: 450 R 2': 0,3500 X'2: 0,74
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 311/343
~ l ~ l U - I I l l U - ~ t X I U - l X I IU - O ,X O ' O - 6 9 1 0 " 0 - O t L O ' O - O t L O ' O - l í L O ' O - t 8 L O ' O - 8 ,8 0 '0 - 1 6 8 0 '0 - 1 " '" " ' " n \ u l JS 6 9 l' 0 M 'O í l l f O 9 9 í íO í6 (fO ,í íC O o o l S 'O r 6 r S 'O I IL S 'O r,1 6 'O fL t6 0 tt 8 6 'O <;1'1110'"'1.1 J~
x r 'o - t r'O - 0 ( '0 - 9 , '0 - ,,'0 - o r'o - ~~"O- r fO - r í 'O - fC O - [m- O fl - 1 ''' 'Z ''' 'l a J I'8 tt 'O ttO " 'O .9 1 9 '0 lX J í fO 6 1 0 f'U 9 I ) í , l l b r O , O 6 9 L i 'O ,b t lO 9 ¿ J 1 '0 1 8 6 0 '0 íO O rO Ill'Z·:lJl¡
S ('O - t ( ,O - o r'o - 9 ,'0 - ,,'0 - u ( 'O - ¡ f'O - r fO - rí 'O - C :O - I xn - O fl - " 'la J VL 9 ' , 6 r , 6 0 ' , 9 í ' I rO '1 l S 'O 6 9 0 O l l O l íO O fO r ( 'o 1 ( '0 ¡n d ¡ u p lJ J n p J J C J U !IP C P [( U J I U I
S C O tC O (1 ( ' 0 9 l '0 8 ,'0 o r'o :( ' 0 ( f 0 ( ¡ 'O rc o 0 0 1 O f l IP " M + ,o 'Z la J V, ( ,O ,f O > f 0 t< J 'O '6 '0 m tf l 'l 'T ! .6 '1 (1 \' , 1 m ~ Z " f 'IW~_IUIZ
1 6 iC I 9 ," í, t ¡ r6 ' , ~ Ó fl 'Z r9 í,'1 I I I I J I b l ,, 'O I t, í 'O ¡ ,t t'0 9 1 [ ,'0 h fl 'O In d l J P d
IX X X ro 9 fh 'I ,1 6 ,', fS lO ', í , 6 r 1 t í 9 b 'O 6 r O : ' l l t l i q l 0 9 rtO 1 6 9 ,'0 \ t f l ' O In d l C J IU C ); )WP IJ U J ll' d
,9 '9 I ( í r n í9 ' , if l 9 (r ! 9 J I 1 9 '0 9 tO S , 'O t l 'O 1 ' [í í í O 'O - b" ,'O - 9 L t ( '0 - ( 6 9 1 ' 0 - i 8 8 0 0 - 6 8 9 D 0 - S i t ir O íM O O ¡ ,O ' O - r r J O ' O - , t ( X ) ' O - S í O O ' O 1 '3 a J I'6 f O 6 í'O , . ' 0 9 S 'O (6 '0 t b 'O 9 6 '0 9 6 '0 9 6 '0 .6 0 ,6 '0 S 6 'O j1 3
ro 'o r l ' o ,1 '0 i l 'O ,0 '0 9 \rO íO 'O t u 'O (0 '0 1 0 '0 (X rO 1 0 '0 - P Z " I W Il i 'O ( f 0 I r ' o í l 'O " 0 '0 9 1 1 '0 íO 'O t u 'O t u 'O (0 '0 ro 'o ,0 '0 I'Z ,IJ 'J M
iO 'O o r 'o , iO " " 'O iS 'O t S 'O 8 ( 0 r c o r9 'O rf O m t,O - !'Z " '¡3 J \,l í 'O t t ' o íe o [ ( ,O I n ) f l r o 9 0 '0 (0 '0 t ú 'O r o 'o ( 0 '0 , 0 '0 I ' z ' 1 1í , ' \ i , '1 í , '1 i , '1 i, 1 í , '1 í , '1 ¡ ,I í l ' 1 it l í, " í, 1 : ' z a l l '
~ 'O 'O S O 'O 8 0 '0 S O 'O ,0 '0 8 U 'O S O 'O S O 'O 8 1 r O S O 'O \'1 1 " 0 8 0 " 0 P z
: . fO S íO í," O 6 \" 0 ,b ll ,6 " 0 6 , " 0 ,," O ,S " O 6 9 " 0 9 f O S O 'O 'o 'O J9 ( 9 íS \ m t. , tf l m í S 'O 1 . '0 8 i " 0 tf O 5 C O Ir " o ¡n d ¡ C J U 
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 312/343
EJEMPLOS COMPLEME TARIOS 295
Los resultados de estos cálculos de arranque se han resumido en el
Apartado 3.1.2 y en la Figura 3.4.
A.3.3. ESTUDIO DETALLADO DEL ARRANQUEDE UN MOTOR ASINCRONOCON AUTOTRANSFORMADOR DE DOSESCALONES DE TENSION
Polos: 4Factor de inercia FI: 20
Accionamiento de un ventilador. Se empleasiguientes datos nominales:
Potencia (kW): 55Inercia motor (kg· m2
): 0,65
un motor asíncrono con los
Se dan las curvas de par motor y corriente a la tensión nominal en lastres primeras columnas de la tabla que sigue.
La curva de par resistente de ventilador se da en la cuarta columna. Sedesea estudiar un arranque con autotransformador para que la intensidadesté siempre por debajo de 2,50 pu. Se elegirán dos escalones intermedios detensión. Se comparará con el arranque directo a plena tensión.
SOLUCIONPar nominal (Nm): 357.
Cuando no se indica las magnitudes se expresan en per unit (pu).
Secuencia del arranque C"Par
l.'" escalón 2." escalón Conexión acel.Datos de entrada Ü =0,65 Ü =0,78 directa (pu)
d C m I C, C m I C m I Cm I
0,000 0,00 0,32 1,00
0,005 0,30 0,50 0,990,010 0,58 0,76 0.980,015 0,83 1,04 0,970,018 0,96 1,20 0,96 Punto r uncionamicnto 0,96 1,20 0,000,019 1,02 1,27 0,96 1,02 1,27 0,060,040 1,61 2,18 0,92 0,97 1.31 1,61 2,18 0,37
0,045 1,69 2,35 0,91 1,02 1,42 0,10
0.060 1,81 2,76 0,88 1,09 1,66 0,21
0,074 1,84 3,04 0.86 1, 11 1,83 0,25
0,10 1,80 3,38 0,81 1,08 2,04 0,27
0,15 1,70 3,75 0,72 1,02 2,26 0,30
0,25 1.66 4,]5 0,56 0,69 1,74 1,00 2,50 0,280,35 1,72 4,47 0.42 0,72 1,87 0,300,45 1,80 4,77 0,30 0,75 2.00 0,45
0,55 1,84 5,06 0.20 0,77 2,12 0,57
0,65 1.86 5,31 0.12 0,78 2,22 0.660,75 1,86 5,53 0,06 0,78 2,32 0,72()R~ 1.83 5.73 0.02 0,77 2,40 0.75
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 313/343
2 9 6 ARRA QUE INDUSTRIAL DE MOTORF-'S ASINCRONOS
Arranque directo
Q
Del Q
C a Del' , acu
Cm C I" C a Del, , acu
d (r.p.m.) rad/s (Nm) (s) (s) (pu) (pu) (Nm) (s) (s)
O.OIX 147J 0.20 21 0.12 12.77 0.96 0.96 21 0.12 4.090.019 1471 3.25 132 0.32 12.65 1.02 0.96 247 0.17 3.970,040 1440 0,79 37 0.27 12.33 1.61 0,92 277 0,04 3.XO0.045 1433 2.36 73 0.42 12.06 1.69 0.91 330 0.09 3.760.060 1410 2.20 XX 0.32 11.64 I.X I O.XX 349 O.OX 3.670.074 13X9 4.0X 97 0.55 11.32 I.X4 (1.X6 352 0.15 3.59
0,10 1350 7,S5 107 0,96 10,77 I,XO O,SI 347 0.29 3.430,15 1275 15,71 101 2.02 9,XI UO o.n 390 0.52 3,140,25 1125 15.71 106 1.92 7.79 1.66 0.56 464 0.44 2.62
0,35 975 15.71 160 1.2X 5.X7 1.72 0.42 532 0.3X 2.IXOA5 X25 15.71 203 1.0 I 4.60 I.XO 0.30 585 0,35 1.790,55 675 15.71 235 O.X7 3,59 I,X4 0,20 621 0.33 IA4
0,65 525 15.71 255 0,80 2.72 I,X6 0,12 641 0,32 1,120.75 375 15.71 266 0.77 1,92 I,X6 0.06 646 0.32 0.800,85 225 15.71 267 0.76 1,15 I.X3 0.02 639 0.32 OAX0,95 75 7.X5 265 0.39 0.39 I.XO 0.00 632 0.16 0.161,00 O 0,00 1.77 0.00
Las curvas de par y de corriente respecto al deslizamiento se ven en laFigura 3.9 del Apartado 3.1.4.
Las mismas curvas para el arranque con autotransformador se ven en laFigura 3.10 Y la comparación cn la Figura 3.11 dcl apartado citado.
A.3.4. ESTUDIO DE LA APLlCACIONDE UN ARRANCADOR ESTATICO
Los datos del motor son los siguientes:
Potencia (k W): 1.200
V sinc (r.p.m.): 1.000
Tensión (V): 6.000
Vel nom (r.p.m.): 987,60
Rend a 4/4: 95,0%
Rend a 3/4: 94,5°;;)
Rend a 24: 94,0°/ 0
Par nom (Nm): 11.603
cos (p a 4 4: 0,89
cos (p a 3/4: 0,87
cos (p a 2 4: 0.81
I nom (A): 136,6Inercia motor (kg· m2
): 120 Accionamiento de ventilador centrífugo
Inercia ventilador (kg·m2): 1.900 Factor Inercia (FI): 16,83
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 314/343
EJEMPLOS COMPLEME TARIOS 297
d (pu) Cm (pu) J (pu) C, C ae dO dI (5 ) 1 / (r.p.m.) t (5)
1,000 1,00 5,40 0,00 1,00 5,24 0,91
0,950 0,98 5,35 0,00 0,98 5,24 0,93 50.00 0,91
0,900 0,96 5,29 0,01 0,95 5,24 0.96 100.00 1.85
0,850 0,95 5,23 0.02 0.92 5,24 0.99 150.00 2.80
0,800 0,93 5,16 0,04 0.89 5,24 1,02 200,00 3.790,750 0,92 5,09 0,06 0,86 5,24 1,06 250,00 4,81
0,700 0,92 5,01 0,09 0.82 5,24 1,11 300,00 5,87
0,650 0,91 4,93 0,13 0,79 5.24 1,16 350.00 6.980,600 0,92 4,84 0,16 0,75 5,24 1,21 400.00 8.14
0,550 0,92 4,75 0,21 0,72 5,24 1,27 450.00 9.350,500 0,94 4,65 0,26 0.69 5,24 U3 500,00 10,63
OA50 0,97 4,54 0,31 0,66 5.24 U8 550.00 11,96
OAOO 1,01 4A2 0,37 0,64 5.24 IAI 600.00 13,34
0,350 1,08 4,29 0,43 0,64 5,24 IAI 650.00 14,750,300 1,17 4,15 0,50 0,67 5,24 1,36 700,00 16,17
0,250 UI 4,01 0,58 0,73 5,24 1,24 750,00 17,53
0,200 1,52 3,90 0,66 0,86 5,24 1,06 800,00 18,77
0,150 1,83 3,74 0,74 1,09 5,24 0,84 850,00 19,830,100 2,28 3,64 0,83 IA5 1,05 0,13 900,00 20,67
0,090 2,37 3,58 0,85 1,52 1.05 0,12 910.00 20.800,080 2A6 3,5 I 0.87 1.59 1.05 0,1 I 920.00 20,92
0,070 2,52 3.40 0,89 1.63 1,05 0,1 I 930,00 21.03
0,060 2,54 3,16 0,91 1,64 1,05 0,1 I 940,00 21,14
0,050 2A9 2,79 0,93 1,57 1,05 0,12 950,00 21,25
0,040 2,34 2,31 0,94 1,39 0,52 0,07 960,00 2U70,035 2,20 2,08 0,95 1,25 0,52 0,07 965,00 21.44
0,030 2,02 1,84 0,96 1,06 0,52 0,09 970,00 21,51
0,025 1,79 1,60 0,97 0,82 0,52 0,1 I 975,00 21.600,020 1,51 1,36 0,98 0,53 • 0,52 0,17 980,00 21.71
0,015 1,19 1,12 0,99 0,19 0,27 0,25 985,00 21.880,012 1,00 1,00 1.00 -0,00 987.60 22,13
0,010 0,82 0,88 1,000,005 OA2 0,64 1,02 Tiempo total (s) 22.13
0,000 0,00 OAO 1,03
En la Figura 4.4 del Capítulo 4 está la curva de aceleración.En la tabla que sigue se estudia el arranque con aceleración controlada.
En cada punto de deslizamiento se calcula el par motor Cllec que ha desuministrarse, que es inferior al que proporciona el motor a plena tcnsión.En consecuencia, se calcula la tcnsión V
lllat (pu) que se ha de aplicar al
motor y la corriente resultante /11I (pu).
Tiempo especificado (s): 60 Par acelerador (Nm): 3.481,8
Aceleración (s - 2 ): 1,72 Par acelerador (pu): 0,30
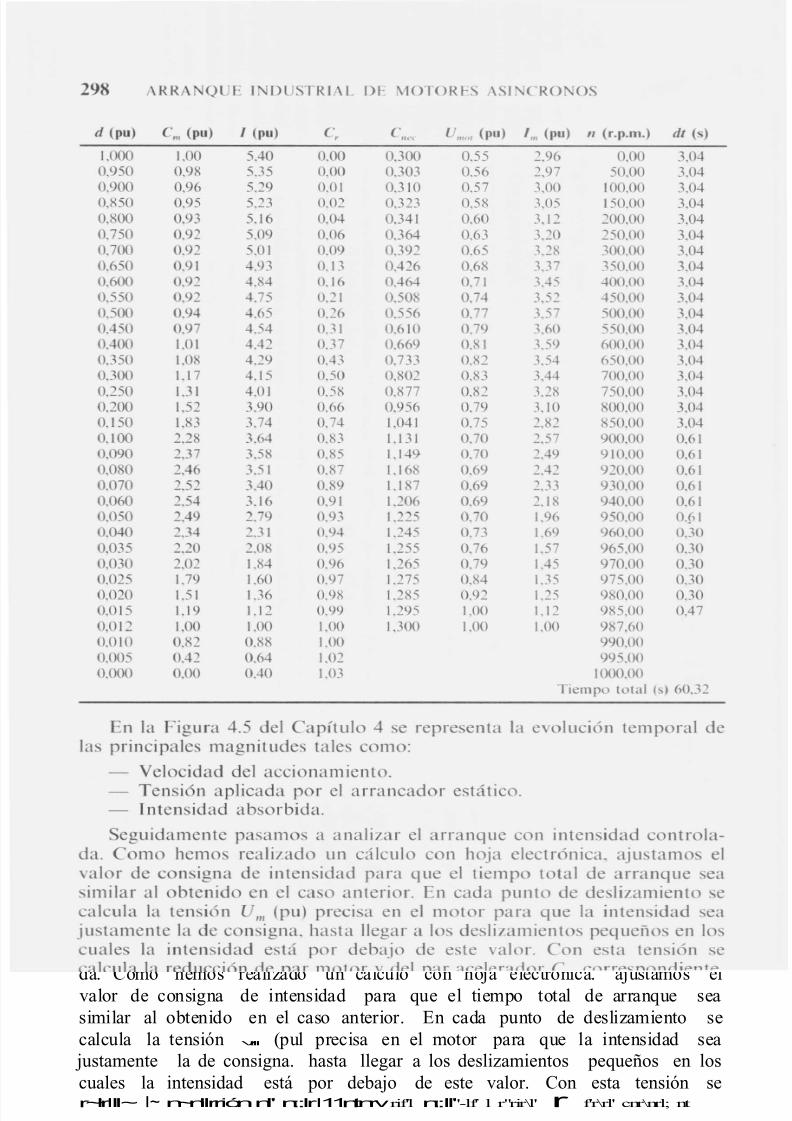
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 315/343
298 ARRANQUE 1 DUSTRIAL DE MOTORES ASINCRONOS
d (pu)
1,000
0,9500,9000,8500.8000.7500,7000.6500,6000.5500,5000,450
0,4000,3500,3000,2500,2000,1500,1000.0900,0800,0700,060
0,0500,0400,0350,0300.0250,0200,0150,0120.0100,0050.000
Cm (pu)
1,00
0,980.960,950,930.920,920,910,920,920,940,97
1,011,081,171,311,521,832,282,372,462.522.54
2,492.342,202,02l,791.511,191,000,820,420.00
I (pu)
5,40
5,355,295,235.165,095.014.934.844.754.654.54
4,424,294,154,013,903.743,643.583.513.403.16
2,792.312.081.841.601,361,121.000,880,640,40
C,
0.00
0,000,010,020.040.060.090,130.160.210.260,31
0,370,430,500,580,660.740.830.850.870.890,91
0.930.940.950.960.970,980.991.001.001.021.03
0,300
0,3030,3100,3230,3410.3640.3920,4260,4640.5080.5560.610
0,6690.7330,8020,8770,9561.0411,1311.1491.1681,1871.206
1.2251,2451.2551.2651.2751.2851.2951,300
U mo / (pu) 1m (pu) 11 (r.p. m.) di (5)
0,55 2,96 0,00 3,04
0,56 2,97 50.00 3,040.57 3.00 100,00 3,040.58 3,05 150.00 3,040.60 3.12 200,00 3.040,63 3,20 250.00 3,040,65 3,28 300.00 3.040,68 3.37 350.00 3,040,71 3.45 400.00 3,040.74 3.52 450,00 3.040.77 3.57 500.00 3,040.79 3.60 550,00 3.04
0.81 3.59 600,00 3.040.82 3,54 650,00 3,040.83 3,44 700,00 3,040.82 3,28 750,00 3.040.79 3,10 800,00 3,040,75 2,82 850.00 3,040.70 2,57 900.00 0.610,70 2,49 910,00 0,610.69 2,42 920,00 0.610,69 2.33 930.00 0.610.69 2.18 940.00 0.61
0.70 1.96 950.00 0.{110.73 1.69 960.00 0,300.76 1.57 965.00 0,300.79 1,45 970.00 0.300.84 1.35 975,00 0,300,92 1,25 980.00 0,301,00 1,12 985,00 0,471.00 1,00 987,60
990,00995,00
1000.00
Tiempo total (s) 60,32
En la Figura 4,5 del Capítulo 4 se representa la evolución temporal delas principales magnitudes tales como:
- Velocidad del accionamiento.- Tensión aplicada por el arrancador estático.- Intensidad absorbida.
Seguidamente pasamos a analizar el arranque con intensidad controla-
da. Como hemos realizado un cálculo con hoja electrónica. ajustamos elvalor de consigna de intensidad para que el tiempo total de arranque seasimilar al obtenido en el caso anterior. En cada punto de deslizamiento secalcula la tensión VIII (pul precisa en el motor para que la intensidad sea
justamente la de consigna. hasta llegar a los deslizamientos pequeños en loscuales la intensidad está por debajo de este valor. Con esta tensión ser~lrlll~ I~ n~nllrriónnI' n::lrl11ntnrvrif'l n::ll''-lf' l r"rir\l' r f'r\rl' cnr\nrl; nt
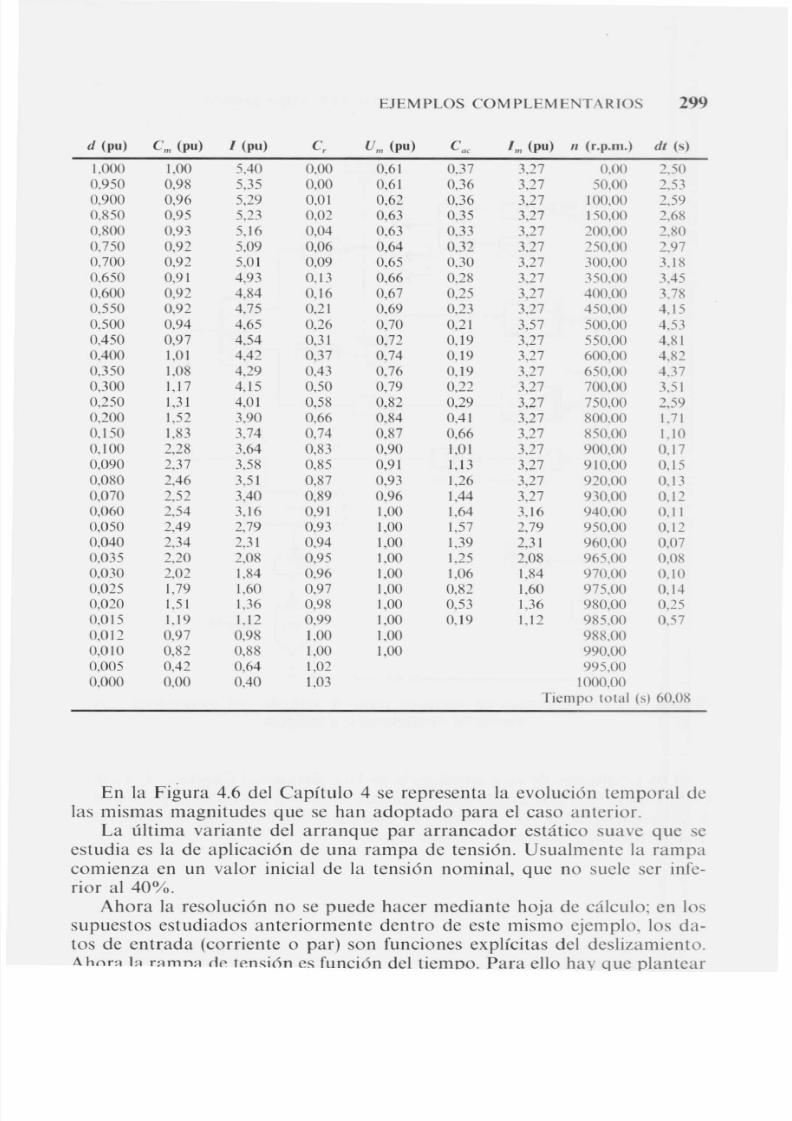
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 316/343
EJEM PLOS COM PLEM E TARIOS 299
d (pu) C m (pu) I (pu) C, U m (pu) C(le 1 m (pu) 11 (r.p.m.) dI (5 )
1,000 1,00 5,40 0.00 0.61 0,37 3,27 0.00 2.500.950 0.98 5,35 0,00 0,61 0,36 3,27 50,00 2.530.900 0,96 5,29 0,01 0,62 0,36 3,27 100,00 2.590.850 0,95 5,23 0,02 0,63 0,35 3,27 150,00 2,680,800 0,93 5,16 0,04 0,63 0,33 3,27 200,00 2.800,750 0,92 5,09 0,06 0,64 0,32 3,27 250,00 2,970,700 0,92 5.01 0,09 0,65 0,30 3,27 300,00 3,180,650 0,91 4,93 0,13 0,66 0,28 3,27 350,00 3,450,600 0,92 4,84 0,16 0,67 0,25 3,27 400,00 3,780,550 0,92 4,75 0.21 0,69 0,23 3,27 450,00 4.150.500 0,94 4,65 0,26 0,70 0,21 3,57 500,00 4,53
0,450 0,97 4.54 0,31 0,72 0,19 3,27 550,00 4,81O A O O 1,01 4,42 0,37 0.74 0,19 3,27 600.00 4,820.350 1,08 4,29 0,43 0,76 0,19 3,27 650.00 4,370,300 1,17 4,15 0,50 0,79 0,22 3,27 700,00 3,510,250 1,31 4,01 0,58 0,82 0,29 3,27 750,00 2,590,200 1,52 3,90 0.66 0,84 0,41 3,27 800.00 1,710,150 1,83 3,74 0,74 0,87 0,66 3,27 850.00 1.100,100 2,28 3,64 0,83 0,90 1,01 3,27 900,00 0,170,090 2,37 3,58 0,85 0,91 1,13 3,27 910,00 0,150,080 2,46 3,51 0,87 0,93 1,26 3,27 920,00 0,130,070 2.52 3,40 0,89 0,96 1,44 3,27 930,00 0,12
0,060 2,54 3,16 0,91 1,00 1.64 3,16 940,00 0,110,050 2,49 2,79 0,93 1,00 1,57 2,79 950,00 0,120,040 2,34 2,31 0,94 1,00 1,39 2,31 960,00 0,070.035 2,20 2,08 0,95 1.00 1.25 2,08 965.00 0,080,030 2,02 1.84 0,96 1.00 1,06 1,84 970.00 0,100,025 1,79 1.60 0,97 1,00 0,82 1,60 975,00 0,140,020 1,51 1,36 0,98 1,00 0,53 1,36 980,00 0,250,015 1,19 1,12 0,99 1,00 0,19 1.12 985.00 0.570,012 0,97 0,98 1,00 1,00 988,000,010 0,82 0,88 1,00 1,00 990,000,005 0,42 0,64 1,02 995,000,000 0.00 0,40 1,03 1000,00
Tiempo total (5) 60,08
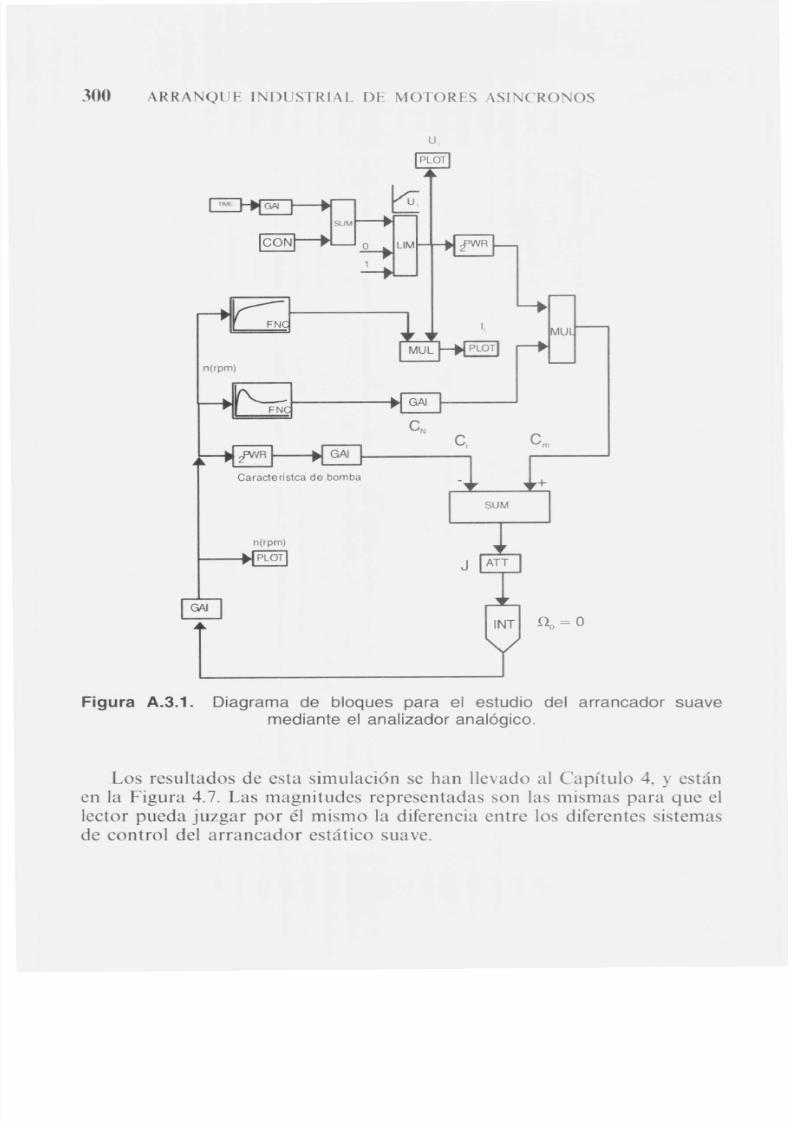
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 317/343
300 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
u
n(rpm)
Característca de bomba
n(rpm)
PLOT
GAI
e N
Figura A.3.1. Diagrama de bloques para el estudio del arrancador suavemediante el analizador analógico.
Los resultados de esta simulación se han llevado al Capítulo 4, y estánen la Figura 4.7. Las magnitudes representadas son las mismas para que ellector pueda juzgar por él mismo la diferencia entre los diferentes sistemasde control del arrancador estático suave.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 318/343
APENDICE
CUATRODIAGNOSTICO DE AVERIAS DEL ROTOR
En los motores asíncronos la avería más peculiar debida al arranque es lade la rotura total o parcial de una o varias barras rotóricas o la de losanillos. En este apéndice presentaremos el modo de diagnóstico de estaavería.
Como consecuencia de las roturas se produce una redistribución decorrientes rotóricas, lo que conlleva mayores pérdidas y pares motores más bajos para unas condiciones de deslizamiento dadas, con lo que el motor hade deslizarse más para llegar a dar la potencia que le demanda la máquinaaccionada. Con este mecanismo, la avería del circuito rotórico se puedeacelerar hasta el fallo catastrófico.
Los sistemas de detección están basados en la monitorización de lacorriente de estátor cuando el motor funciona en carga. Así, se emplea al
propio bobinado de estátor como bobina exploradora para detectar las perturbaciones del campo magnético causadas por el defecto rotórico.
La corriente de estátor absorbida por un motor ideal debe de tener unafrecuencia simple igual a la de la red, como se ve en la parte inferior de laFigura A.4.!. Si sometemos a esta onda al análisis de Fourier, dará unespectro de frecuencias en el dominio amplitud-frecuencia, que tiene unasola frecuencia que es igual a la fundamental o de red.
A partir del hecho experimental, largamente observado por los operado-res de motores, de que en un motor con defectos en el circuito rotórico la
corriente leída en los amperímetros parece que oscila con baja frecuencia se puede demostrar que un circuito rotórico defectuoso refleja en el estátor una frecuencia baja ligada con la de deslizamiento. Este fenómeno se ve enla parte superior de la Figura AA.!. El analizador de corriente estatórica para detectar fallos rotóricos realiza, por medio de la FFT (TransformadaR,;>nirl", rlp F()nripr) \In análisis esoectral de las ondas de intensidad. En el
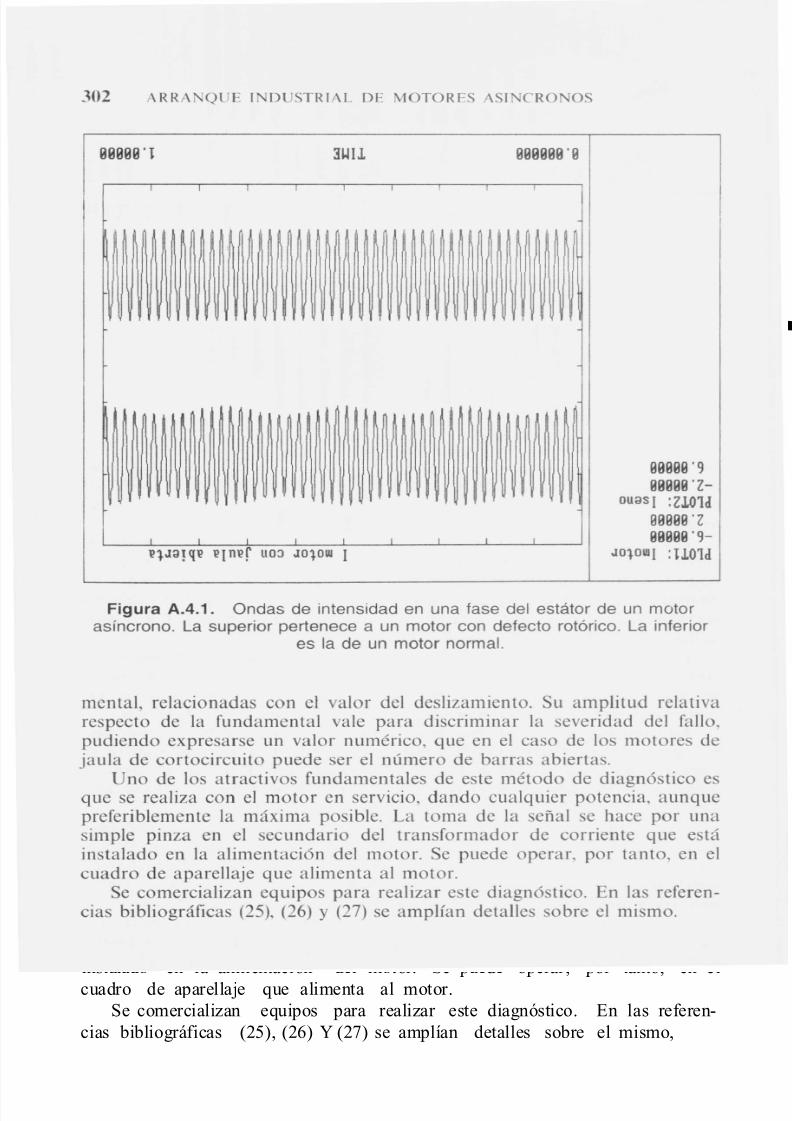
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 319/343
302 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
l l l l l l l l l l ' l 3 W I.L l l l l l l l l l l l l ' l l
.~~~~~I~1 l l l l l l l l l ' 9
1 l 1 l 1 l 1 l 1 l ' Z -
o u a s ¡ : Z l O 1 d
~ ~ I l I l ~ ' Z
I 1 l 1 l 1 l 1 l 1 l ' 9 -
~l J a ! q ~ ~ln~f UOJ J O l o W ¡ J O l OW¡ : l 1 0 1 d
Figura A.4.1, Ondas de intensidad en una fase del estátor de un motor
asíncrono, La superior pertenece a un motor con defecto rotórico. La inferior es la de un motor normal.
mental, relacionadas con el valor del deslizamiento. Su amplitud relativarespecto de la fundamental vale para discriminar la severidad del fallo, pudiendo expresarse un valor numérico, que en el caso de los motores de jaula de cortocircuito puede ser el número de barras abiertas.
Uno de los atractivos fundamentales de este método de diagnóstico esque se realiza con el motor en servicio, dando cualquier potencia, aunque preferiblemente la máxima posible. La toma de la señal se hace por unasimple pinza en el secundario del transformador de corriente que está
instalado en la alimentación del motor. Se puede operar, por tanto, en elcuadro de aparellaje que alimenta al motor.Se comercializan equipos para realizar este diagnóstico. En las referen-
cias bibliográficas (25), (26) Y (27) se amplían detalles sobre el mismo,
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 320/343
APENDICE
CINCORE LACIO N DE FABRICANTES
Y SUMINISTRADORES DE EQUIPOSDE ARRANQUE
En este apéndice facilitamos los nombres de las compañías que contestarona nuestra demanda de información o que fue obtenida a través de publica-ciones profesionales.
ABB Diestre, s . A.Carretera de Madrid, km 314
ABB Industria, S. A.Marie Curie, 35
ABB Motores, S. A.Polígono Industrial S. O.
AEG Ibérica de Electricidad, S. A.Av. Lehendakari Aguirre, 11
AGUT. Power Controls IbéricaMarqués de Comillas, 1
C2 SystemsGalileo, 234, 1.° E
Cating, S. A.Rey Don Jaime, 4, bajos
Danfoss, S. A.San Rafael, 10. Polígono Industrial
Electromateriales KLK, S. A.Apartado 333
Zaragoza
Barbera del Valles
Sant Quirze del Valles
Bilbao
Terrassa
Terrassa
L' Hospitalet de L10bregat
Alcobendas
Gijón
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 321/343
304 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Enerco, S. A.Apartado 265 Castellón
Ekimen, S. Coop. Ltda.Barrio Beballea, sin Billabona
Eurotronik General Moscardó, 34 Albujón-Cartagena
F. U. Ibérica, S. L.Trafalgar, 4, planta 5B Barcelona
Indar, S. A.
Nafarroa Etorbidea, 45 Beasain
Industries Electriques AMO.IER.San Salvador, 97-99 Barcelona
Ingeniería Española, S. A.Polígono La Cartuja Baja, calle A La Cartuja Baja
Ingeo, S. A.Farell, 9 Barcelona
International Electronics, S. A.Los Pintores, 3. PoI. Ind. Urtinsa Alcorc6n
Jesús María Aguirre, S. A.Lasarte-Oria San Sebastián
Klóckner Moeller, S. A.Xenpelar, 2-4 Bilbao
Maquinaria Eléctrica Bilbao, S. A.Barrio Elorrieta, 9 Bilbao
Mecánica Moderna, S. A.Alava, 60 Barcelona
RALPE Equipamientos TécnicosComerciales. Apartado 1066 Bilbao
SIDE, Servicio Industrial de Electrónica, S. A.
Siemens, S. A.Máximo Aguirre, 18, bis Bilbao
Sumitecno Ibérica, S. L.Prat, 12 El Prat de L10bregat
Telemecánica, S. A.Carretera de Andalucía, km 13 Getafe
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 322/343
APENDICE
SEISNORMALIZACION SOBRE ARRANQUE
DE MOTORES ELECTRICOS
Se aplica la normativa propia de motores eléctricos vigente en los diferentes países.
Los principales organismos que han establecido normas referentes a
motores eléctricos y también al proceso de arranque son los siguientes:
- Comisión Electrotécnica Internacional- Unión Europea- España
- Alemania
- Francia- Reino Unido- Estados Unidos
- Japón
CEI/IECCENELECUNEAEEDINVDEVOl
AFNOR BS
NEMAANSIJIS
Por supuesto que esta lista no es exhaustiva.Solamente vamos a dar un extracto de los títulos de las normas UNE
(Una Norma Española) más relacionadas con el arranque de los motores
eléctricos.
Arrancadores de motores en baja tensión. Arrancadoresdirectos en corriente alterna a plena tensión UNE 20 115 (1)
A rr;¡ncadores de motores en baja tensión. Arrar{"cadores
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 323/343
306 ARRANQUE 1 DUSTRIAL DE MOTORES ASINCRO OS
Arrancadores de motores en baja tensión. Arrancadoresrotóricos de resistencias .
Arrancadores de motores en baja tensión. Arrancadoresen corriente alterna a tensión reducida. Arrancado-res por autotransformador en dos etapas .
Máquinas eléctricas rotativas. Características de arran-que de los motores trifásicos de inducción de jaulacon una sola velocidad para tensiones de alimenta-ción iguales o inferiores a 660 V .
UNE 20 115 (3)
UNE 20 115 (4)
U E 20 162
Indicamos también que la información completa sobre normalización espa-
ñola, extranjera o supranacional se puede obtener de:
ASOCIACION ESPAÑOLA DE NORMALIZACION (AENOR)Servicio de Publicaciones
C/ Fernández de la Hoz, 5228010 MADRID
Teléfonos 91/4104851 - 55 - 59Telefax 91/4104976
En la citada asociación se pueden adquirir también ejemplares de lasdistintas normas convenientemente actualizadas.
Finalmente, indicamos las tolerancias sobre las magnitudes relevantes para el arranque. Se refieren bien a valores de catálogo o de contrato, y sonmuy parecidas en las diferentes normas consultadas.
Corriente de arranque en motores de cortocircuitoPar de arranque en motores de cortocircuitoPar máximo en motores de cortocircuito
Inercia
+20%-15%+25%
-10%
±IO%
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 324/343
APENDlCE
SIETEVOCABULARIO Y ACRONIMOS EMPLEADOS
Accionador. Es el elemento de la cadena de control que transmite la acclOn decontrol; por ejemplo, el motor que actúa sobre una válvula motorizada.
Acoplamiento centrífugo. La acción de embrague depende de la fuerza centrífugay, por tanto, de la velocidad. Actúa, en consecuencia, a partir de una dada.
Adiabático. Régimen termodinámico en el cual no hay intercambios de calor conel entorno.
Admitancia. En el estudio simbólico del circuito de corriente alterna, es la inversade la impedancia. La admitancia multiplicada por la tensión vectorial da el valor vectorial de la intensidad.
Aislamiento galvánico. Se aplica a los circuitos acoplados pero que están a poten-ciales distintos y separados.
Angulo de conducción. Es el ángulo eléctrico que da el inicio de la conducción enlos semiconductores. Se cuenta a partir del paso por cero de la tensión.
Antiparalelo. Indica que dos componentes semiconductores (diodos o tiristores);
están montados en paralelo con el sentido ánodo cátodo de cada rama opuesto.Asimetría de red. Una red asimétrica tiene o bien impedancias desiguales en sus
fases, o está recorrida por corrientes desequilibradas o las tensiones de sus fasesno están equilibradas.
Autodiagnóstico. Se dice de los sistemas que permiten diagnosticar sus incidenciasde funcionamiento.
Bobina de reactancia. Bobina que presenta un acusado coeficiente de autoinduc-ción propia y, por tanto, de reactancia inductiva en corriente alterna. Su resis-tencia es despreciable.
Booster. En una asociación en serie de generadores se dispone uno de ellos para
aumentar la tensión resultante de la asociación de forma momentánea.BT. Baja tensión.Bucle cerrado. Se dice del control con realimentación en el cual la señal del valor
real se compara continuamente con la de consigna, y la acción reguladora esfunción de la diferencia (error) entre consigna y valor real.
Calibre. En componentes de aparellaje tales como contacto res, fusibles, secciona-

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 325/343
308 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
CEI. Comisión Electrotécnica Internacional.Cero defectos. En un sistema de calidad total es la forma abreviada de designar su
objetivo, que es el de obtener productos sin defectos.Ciclo S5. Ciclo de trabajo normalizado intermitente en motores eléctricos en el que
intervienen los arranques y los frenados eléctricos.Circuito R...C. Asociación de resistencia y condensador en serie y que sirve para
filtrar o amortiguar.Conmutación. Cambio en la configuración de un circuito.Consigna. Valor objetivo de la magnitud que se está controlando.Control autoadaptativo. Tipo de control que tiene en cuenta la evolución a lo
largo del tiempo de los parámetros de los componentes que intervienen en lacadena de control.
Cortocircuitar. Acción de separar a un componente del circuito principal medianteun puente o cortocircuitador de resistencia despreciable.
Corrientes parásitas de Foucault o Eddy. Las que no son útiles a efectos de lafinalidad del circuito principal.
Dahlander. Conexión del estátor de un motor de corriente alterna que con un solo bobinado da dos velocidades en la relación de 2 a l.
Designación aRo Para los fusibles de acompañamiento de protección de semicon-ductores.
Desplazamiento de corriente. Fenómeno que se da en los conductores de secciónmayor que su profundidad de penetración, por el cual la intensidad se distribuye
irregularmente como si estuviera desplazada (véase Efecto «skin» o pelicular).Dinamo tacométrica. Generador de corriente continua que da una tensión propor-cional a la velocidad angular. Se emplea para dar la señal de la velocidad real deuna máquina.
Diodo Zener. Se denomina también de avalancha o de ruptura. Es un diododiseñado con capacidad de disipación para trabajar en la zona de ruptura de latensión inversa. Se emplean como dispositivos de tensión constante o de protec-ción de sobretensiones.
Distorsión armónica. Cuando hay armónicos en una onda senoidal, la suma cua-drática de los mismos da la distorsión armónica, que es una medida del conteni-
do global de armónicos.Efecto «skin» o pelicular. El que se da en un conductor en corriente alterna desección importante frente a la profundidad de penetración (véase Desplazamien-to de corriente).
Enclavamiento. Relación entre dos dispositivos de modo que uno no actúe sinhaber actuado el otro. Se emplean para garantizar la seguridad en las manio-
bras.Ensayo de rigidez. Ensayo para determinar la resistencia a la perforación de un
aislamiento eléctrico.Entrehierro. Espacio de aire de pequeño espesor radial que separa al rotor del
estátor en una máquina eléctrica. En él se dan las transformaciones electromag-néticas fundamentales.Escobilla. Dispositivo frotante de grafito que permite el paso de corriente a un
rotor bobinado de una máquina eléctrica.Factor de inercia (FI). Relación entre la inercia total del accionamiento y la propia
del motor.Factor de m~rrh~ fFM\ t:n IA~ ~~.~~~" ~~- ------,-. . .
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 326/343
VOCABULARIO Y ACRONIMOS EMPLEADOS 309
FI (Factor de Inercia). Relación entre la inercia total del accionamiento y la
propia del motor.Flujo en cuadratura. Es el flujo que está defasado 90° eléctricos respecto del principal.
FM (Factor de Marcha). En los motores con servicio intermitente, relación por-centual del tiempo entre la fase de conexión y el tiempo total del ciclo.
Fuerza contraelectromotriz (F.c.e.m). Fuerza electromotriz que se induce electro-magnéticamente en un bobinado, y que es opuesta a la tensión externa aplicada.
Fusible extrarrápido. Fusible especial para proteger tiristores con tiempos deactuación inferiores a los de los fusibles normales.
Galga extensométrica. Resistencia calibrada de dimensiones pequeñas y que se une
muy solidariamente a una pieza que se deforma bajo tensión. Por la variación dela resistencia al ser tensionada la pieza se ve su alargamiento y la carga detrabajo a la que está sometida.
GD2• Inercia designada de acuerdo con las normas alemanas.
Golpe de ariete. Fenómeno transitorio en tuberías; se produce en forma de ondasalternadas de presión y depresión.
Gradiente. Pendiente de una curva o derivada primera.Guardamotor. Asociación contactor y relé magneto térmico empleada para manio-
brar y proteger a un motor.Hexafloruro de azufre SF6. Gas de muy buenas propiedades dieléctricas y de
extinción de arcos que se emplea en interruptores eléctricos.Histéresis. Retardo entre causa y efecto.Histéresis magnética. Retardo entre la acción magnetizan te y el flujo magnético
producido.HVDC. Acrónimo para designar los sistemas de transmisión eléctrica en muy alta
tensión continua (High Voltage Direct Current).IACS. International Annealed Copper Standard. Patrón Internacional de Conduc-
tividad respecto a cobre recocido.lEC. International Electrical Commision. Comisión Electrotécnica Internacional.Inductor. Circuito o bobina que induce tensión en otro cercano gracias a la acción
electromagnética.Intensidad media cuadrática. También llamada intensidad eficaz. Raíz cuadrada
de la suma de los cuadrados de los valores temporales.Magnetismo remanente. Flujo magnético que queda en el material magnético
después de suprimir el campo magnetizante.Magnitud base. En el sistema unitario o «per-unit (pu»>, magnitud a la que se
refieren todos los valores de una variable física.Mantenimiento predictivo. Método de mantenimiento basado en el seguimiento de
la evolución de parámetros determinados, y en función de su tendencia progra-mar las actuaciones de mantenimiento.
Mantenimiento preventivo. Método de mantenimiento basado en la programaciónde actividades de mantenimiento en plazos prefijados.
Material «composite». Material diseñado para dar unas propiedades determina-das. Consta de matriz aglomerante y fibras de refuerzo. Casi siempre tiene propiedades aislantes.
MaxÍmetro. Aparato que mide la punta o potencia absorbida en períodos prefija-dos v mantiene el valor leído máximo del período.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 327/343
310 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Monitorización. Técnica de vigilancia de equipos y máquinas basada en la adquisi-ción sucesiva en el tiempo de las magnitudes que mejor caracterizan el estado dela máquina o equipo.
Motorettes. Pequeños modelos de motor que contienen una reproducción delsistema de aislamiento con todos sus componentes. Con ellos no se pretenderepresentar el funcionamiento del motor.
MT. Media tensión.NEMA. National Electrical Manufacturers Association. Organización de ormali-
zación de Estados Unidos.Nomograma. Gráfico a escala para hacer cálculos determinados; se le llama tam-
bién ábaco.PDz
. Inercia.Per unit. Por unidad. Designación cn inglés del sistema unitario.Permeabilidad. Capacidad de un circuito magnético para conducir un flujo mag-
nético determinado por unidad de sección transversal.Puente de Graetz. Montaje de 6 diodos o tiristores, en una red alterna trifásica y
en el que 3 semiconductores tienen el ánodo común y otros 3 el cátodo.Pulso. Onda de frentes escarpados no periódica y de duración breve.Rampa. Designa el crecimiento de una orden de actuación con pendiente constan-
te a lo largo del tiempo.Reactancia sÍncrona. Característica de las máquinas síncronas que engloba a las
fugas magnéticas y a la reacción de inducido. Vale para el cálculo de la caída detensión en régimen permanentc.
Reactancia subtransitoria. Engloba los fenómenos que ocurren en una máquinasíncrona durante su régimcn subtransitorio.
Rectificador controlado. Formado por semiconductores en los que hay puerta para variar sus períodos de conducción.
Rectificador no controlado. Formado por semiconductores en los que no hay puerta ni otro control para variar su estado de conducción.
Regulador PID. Regulador que da un control correctivo sobre el sistema, que tieneacciones Proporcional, Integral y Derivativa sobre la señal de error en cadamomento.
Reóstato. Conjunto de resistencias óhmicas sobre un bastidor junto con sus ele-mentos de conmutación.
Saturable. Se aplica al circuito magnético que puede entrar en saturación.Saturación. Propiedad de un circuito magnético por la cual el crecimiento dcl
flujo, a partir de un nivel de magnetización, es muy inferior al de la fuerzamagnctizante. A altas saturacioncs llega a ser inapreciable.
SFó Hexafloruro de azufre. Gas de muy buenas propiedades dieléctricas y deextinción de arcos que se emplea en interruptores eléctricos.
SI (Sistema Internacional). Unico sistema legal de mediciones.Termovariable. Se aplica al elemento cuyas propiedades físicas varían con su
tem pera tura.Tiristor. Es un rectificador controlado de silicio. Semiconductor con biestables,
controlable mediante la puerta.Transductor. Componente que convierte una magnitud física en una tensión o
intensidad eléctrica y que es proporcional. Es fundamental para la realización desistemas de control.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 328/343
VOCABULARIO Y ACRONIMOS EMPLEADOS 311
Transitorio. Designa a la parte de variación rápida de los procesos temporales. Esla parte del fenómeno que ocurre en los tiempos inferiores a 3 o 4 veces el valor de la menor constante de tiempo del sistema analizado.
True RMS. Verdadero valor eficaz, especificación de los aparatos o sistemas demedición que dan este valor.
Unitario. Referente al sistema unitario o «per - uni!».Varistor. Resistencia variable dependiente de la tensión aplicada. Se emplea para
supresión de sobretensiones.Wr. Inercia designada de acuerdo con normas anglosajonas.

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 329/343
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 330/343
APENDlCE
OCHOREFERENCIAS BIBLIOGRAFICAS
Vamos a estructurar esta bibliografía en tres partes, en función de suutilidad para el lector; éstas serán:
- Referencias generales sobre electrotecnia, máquinas eléctricas y ac-cionamientos.Referencias generales sobre la problemática del arranque de los mo-tores eléctricos.Referencias específicas empleadas por el autor para la redacción dedeterminadas partes de este libro. Dentro de esta categoría se clasifi-can incluso aquellas generales de empleo concreto a lo largo dellibro.
De todas ellas, solamente se citarán numeradas a lo largo del libro lasdel tercer grupo, y estas referencias se llevarán al lugar del texto en donde seemplean por primera vez.
REFERENCIAS GENERALES
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 331/343
314 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
REFERENCIAS SOBRE ARRANQUE DE MOTORES ELECTRICOS
1. SERRA O IRIBARNEGARAY, L.; RIERA GUASP, M., y CERVERA, A.: «Arranque demotores asÍncronos (1). Descripción general del proceso, magnitudes principalesy su evolucióo», Revista Proyecto, núm. 40, septiembre 1988.
2. SERRA O IRIBAR EGARAY, L.; RIERA GUASP, M., y CERVERA, A.: «Arranque demotores asÍncronos (11) . Restricciones de origen eléctrico y o mecánico», Rel'is-
ta Proyecto, núm. 41 , octubre 1988.3. SERRANO IRIBARNEGARAY, L.; RIERA GUASP, M., y CERVERA. A.: «Arranque de
motores asÍncronos (lIl). L imitaciones de tipo térmico . Arranque d irecto», Revista Proyecto, núm. 42, noviembre 1988.
4. SERRANO lRIBARNEGARAY, L.; RIERA GUASP, M., y CERVERA, A.: «Arranque demotores asÍncronos (IV). Arranque estrella-tr iángulo y arranque por autotrans-formadon>, Revista Proyecto. núm. 43, dic iembre 1988.
5. SERRANO IRIBARNEGARAY, L.; RIERA GUASP, M., y CERVERA, A.: «Arranque demotores asÍncronos (V). Arranque por inserción de resistenc ias estatóricasy mediante arrancadores electrónicos», Rerista Proyecto, núm. 44, enero-febre-ro 1989.
6. SERRANO lRIBARNEGARAY, L.; RIERA GUASP, M., y CERVERA, A.: «Arranque demotores asÍncronos (VI) . Arranque mediante inserción de resis tencias rotóri-cas», Revista Proyecto, núm. 45, marzo 1989.
7. ROSE BERRY, G. M.: «The transient sta lled temperature rise of cas t a luminumsquirrel cage rotors for induction motors», Transactions Al EE POlI"er Appara-
tus anel Systellls, octubre 1955, págs. 819 a 824 .8. GRIFFITH, J. W. y otros: <<lnduction motor squirre l cage rotor winding thermal
analysis», IEEE Trallsactiolls 011 Elleryy COlll'ersioll, vol. EC - 1, septiembre1986, págs. 22 a 25.
9 . TAVNER, P. J. Y o tros: «Trans ient thermal characteristics of induction machinerotor cage», IEEE Transactiolls 011 Ellery)' COlll'ersioll, vol. EC - 3, diciembre1988, págs. 849 a 854.
REFERENCIAS ESPECIFICAS
1. COURTIN, J. J.: «Ten part-winding arrangements in sample 4-pole induc tionmoton>, Al E E Trallsactiolls ill POlI"er Apparatus allll Systellls, diciembre 1955,
páginas 1248 a 1254.2. A LGER, PH ILIP L. : <<1nduction machines. Their behavio r and uses» , Cordoll
Breach Scienc'e Puhlishers, Nueva York, Lond res, París, 1970.3. HARGER, JAN, Y KREMSER, A DREAS: «Einfaches Berechnungsverfahren des
Teilwicklungsanlaufs von Induktionsmaschinen», ETZ Archil' Bd. 11. Heft 5,
1989, páginas 155-162.4. J. A . GUALDA, S. MARTÍNEZ y P. M. MARTÍNEZ: «Electrónica Industrial:
Técnicas de Potencia», Marcolllho, Boixareu Editores, Barcelona-México, 1982.5. STEVENSON, WILlAM D.: «Análisis de sistemas eléctricos de potencia», Edicio-
nes del Castillo , S . A., Madrid. 1965.6. RUPPERT FILHO, E., y AVOLlO, E.: «Dynamic simulation of an indllc tion motor
fed from an isolated synchronolls generator», l C EM, 1988, págs. 571-576.
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 332/343
REFERENCIAS BIBLlOGRAFICAS 315
8. KOSTENKO, M ., y PIOTROVSKI, L.: «Machines eléctriques», Editions Mil', Mos-cú, 1969.
9. DIEGO NOGuÉs, CARLOS: «Determinación de la var iación de la in tens idad a lolargo de los electrodos sumergidos en las sales fundidas y de la variación de ladiferencia de potencial entre los mismos», DYN A, núm. 3 , marzo 1969.
10. MARTÍNEZ GARCÍA, SALVADOR: «Prontuario para e l Diseño Eléctr ico y Elec-trónico», Marcombo, Boixareu Editores, Barcelona-México, 1989.
11. VOGEL, JOHANNES: «Grundlagen der e lektr ischen Antr iebs technik mit Berech-nungsbeispielen», Dr. Alfi"ed Hiithig Verlag, Heidelberg, 1989.
12. CUBERT, JOSÉ MA UEL: «Use of e lectronic control lers in order to increase theservice l ife of asynchronous motors», ELTl European Seminar «Electrotechnolo-
gies for Industry», B ilbao, Zamud io Technological Park, mayo 1992, pági-
nas 393-404.13. R . BLA C HARDIE y o tros: «Comportment en régime transitoire des cages de
moteurs asynchrones», Revue Generale de L' Electricité, septiembre 1966, pági-nas 1059-1070.
14 . RAUSCH, H.: «Drehschwingungsbeanspruchung der Kafigwicklung be i Induk-tionsmaschinen», ETZ Archiv Bd. 6, 1984, Heft 5, págs. 165-172.
15. SPICKMANN, HORST: «Mechan ische Beanschpruchung der Kafige von Async-hronmaschinen», ETZ A Bd. 97 (1976), Heft 11, págs. 676-680.
16. SCHWARZ, K. K.: The design oIreliahle squirrel cage rotors, Publ ication 189 deLaurence, Scott & Electromotors Ud.
17. ANDRESEN, EGON CHRISTIAN: «Berechnung der Wicke lkopfkra fte von Syn-chron-und Asynchronmaschinen mit digitalen Rechenmaschinen», ETZ-A-Bd.
86 (1965), H. 12, págs. 391 a 395.18. ORLOWSKI, H.; PITTIUS, E., Y SEINSCH, H. O.: «StoBdrehmomente im Wellen-
strang von GroBantrieben», ETZ Bd. 1 1 . Heft 6 , 1990, págs . 286 a 291.19 . KAROLEWSKI, B., y PVTEL, J.: «Transiente Vorgange im Antriebssystem mit
Berücksichtigung von Kupplungselastizitaten», ETZ Archiv Bd. 11. Hefi 6,
1989, páginas 199 a 203.20. KÜMMEL, FRITZ: «Elektrische Antriebstechnib>, Teil 1, Maschinen. Teil2, Leis-
tungsstellglieder. VDE Verlag GmbH, Berlín, Offenbach, 1986.
21. K EVE, TH., Y ROGGE, D.: «Lebensdauerverkürzung der S tanderwicklung vonDrehstrom Kafiglaufermotoren durch wiederholte Anlaufe», ETZ Archiv Bd. 6,
1984, Heft 8, págs. 295 a 298.22. COPERCHINI, c., y HEROUARD, M.: «La sta tion d 'e ssa i des moteurs de Sain t
Denis», E de F, Bulletin de la Direction des Etudes et Recherches, Serie B, nú-mero 3 , 1977, págs. 17 a 31.
23. MICHEL, MANFRED: «Die Strom-und Spannungsverhaltn isse bei der Steuerungvon Drehstromlasten über all tiparallele Ventile», ETZ - A, Bild 88 (1967), Heft10, págs. 244-249.
24. MICHEL, MANFRED: «Die Strom-und Spannungsverhaltn isse bei der Steuerung
von Drehstromlasten über Paare von Thyris torell ulld Dioden», ETZ - A, Bild 91 (1970), Heft 9, págs. 510-514.
25. REASO, JOHN: «Pinpoin t induc tion motor faults by analyzing load curents» ,Power, octubre 1987, págs. 87 y 88.
26. TAVNER, P. J. y otros : «An electrical technique for monitoring induction motor cages», Third International Conference on Electrical Machines and Drives, 1987.
... . ""o"" _ ~__ A " ) • .. • 1 1 c . .
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 333/343
316 ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
cracked rotor bars in large squirre l cage induction motors», Third International
Conference on Electrical Machines and Drit'es, 1987, IEEE Conference Publica-
tion 282, págs 145 a 149.28. SERRANO-IRIBARNEGARAY, L.: Fundamentos de múquinas eléctricas rotativas,
Edito ria l Marcombo, Barcelona , 1989.29. SERRANO-IRIBARNEGARAY, L .: «The modern space phasor theory . Part J : lts
coherent formulation and its advantages for transient analysis of converter-feda.c. machines», E TEP E ur. T ran s. on Ele ctr. P OlV er E nyn g .. 3 (1993), núm. 2 , páginas 171 a 180.
30. SERRANO-IRIBARNEGARAY, L .: «The modern space phaso r theo ry. Part Il:Com parison w ith the G eneralized M achine Theory and the Space Vector Theory», ETEP Eur. Tralls. 011 Electr. POII'er Ellyng., 3 (1993), núm. 2, págs 213
a 219.31. SERRANO-IRIBARNEGARAY, L .: «Critica l review of the genera lized machine
theory and corre la tion theorems in the space phasor theory», ETEP Eur. Tra 11S .
on Electr. Power Engllg. (1995).
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 334/343
APENDICE
NUEVERELACION DE SIMBOLOS
B Inducción magnética
e Capacidad electrostática
C te Capacidad térmica
d Diámetro, factor de amortiguamientoE Módulo de elasticidad, energía
Jp Frecuencia de pulsos
fl Frecuencia de estátor f2 Frecuencia de rotor
F Fuerza
F l Factor de inerciaFT Tiro mecánico
g Aceleración de la gravedad (g = 9,81 m/s2)
h Altura H Campo magnético
1 Corriente instantánea, relación de transmisión mecánicai* Corriente en pu
le c Corriente de cortocircuito permanente
Icc2 Corriente de cortocircuito permanente bifásico
J Inerciak Indice entero, orden de armónico
L B Inductividad de una bobinaLm Inductividad principal
L " Inductividad de fugas o de dispersión
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 335/343
318 ARRANQUE INDUSTRIAL DE MOTORES ASINCRO OS
l1 J Masa
e Par
Cm Par motor
C r Par resistente
Ca Par acelerador
1 1 Velocidad angular
11* Velocidad angular pu
11 0 Velocidad síncrona
P p Número de pulsos
P PotenciaP em Potencia electromagnéticaP m Potencia mecánica
P 1 Potencia de estátor, potencia de alimentación
P 2 Potencia de rotor
P p Potencia de pérdidas
P Tr Potencia del transformador
Q Potencia reactiva
Q ( 1) Potencia reactiva del armónico fundamental R Resistencia óhmica, banda de regulación
R B Base para las resistencias
R 1 Resistencia del esuHor
R2 Resistencia del rotor
R 2.Y Resistencia nominal del rotor RC\t Resistencia externa de regulación rotórica
R ¡e Resistencia térmicas Espacio recorrido, deslizamiento
Smü, Deslizamiento del punto de par máximoS Potencia aparente
S(1) Potencia aparente del armónico fundamentalI Tiempo
la Tiempo de arranque
If Tiempo de frenado
te; Tiempo de cicloTJ Constante de tiempo de inercia
T'1l
Constante de tiempo de arranque en cortocircuito
t p Duración del período del pulso
u Valor instantáneo de la tensión
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 336/343
RELACION DE SIMBOLOS 319
UT Tensión de tiristor
V Tensión eficazV Tensión valor medio
V 1 Tensión de la fuente
Vi,' Tensión ideal en vacío
V 2 Tensión del rotor
V 2/1 Tensión del rotor a rotor paradoV 1 Tensión de estátor, tensión de alimentación
V D Tensión en triángulo
V y Tensión en estrellaVras Tensión por fase
V(k) Tensión del armónico k-ésimo
u Relación de transformación
v Velocidad
V Tensión magnética
w¡ Rizado de onda de corriente
\\'u Rizado de onda de tensión
W Trabajo, energíaX Reactancia
X 2a Reactancia de fugas de rotor
X", Reactancia principal
X ee Reactancia de conmutación, reactancia de cortocircuito
X a Reactancia de dispersión o de fugas
X la Reactancia de fugas de estátor
X Tr Reactancia del transformador y Admitancia
z Conductores por fase
Z Impedancia
ZL Impedancia de la carga
lJ . Angulo de pendiente, ángulo de encendido(5 Entrehierro, para pequeñas variaciones máximo campo de oscila-
ción, ángulo de conducción
FM Factor de marcha, tiempo de conexión/1 Rendimiento
1 7 R Rendimiento de la transmisión
r ¡N Rendimiento en el punto nominal
O Temperatura, ángulo total girado
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 337/343
320
()81
082
CoS < P
Il
Ilr
I l o
ARRANQUE INDUSTRIAL DE MOTORES ASINCRONOS
Temperatura en el bobinado de estátor
Temperatura en el bobinado de rotor Factor de potencia
Permeabilidad magnéticaCoeficiente de rozamiento, permeabilidad relativa
Permeabilidad absoluta del vacío
Permeabilidad a la componente alternaFactor de bobinado, permitividad, constante dieléctrica
Permitividad absoluta del vacío
Permitividad relativaDensidad, resistividad eléctrica
Factor de dispersión o de fugas, conductividad eléctrica
Flujo magnético
AnguloVelocidad angular, frecuencia circular
Frecuencia angular del estátor
Frecuencia angular del rotor
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 338/343
INDICE ALF ABETICO
Aceleración lenta, 11Aceleración suave, 53
Acoplamiento de llenado constante, 77Acoplamiento de llenado variable, 77Ahorro con arrancador estático, 118Ahorro energético, 84, 89, 90Alimentación desequilibrada, 54Angulo de conducción, 83Antiparalelo, 83Aplicación de relés térmicos, 156Aplicaciones arrancador estático, 85,
213
Aplicación de los arranques, 210Armónicos de arrancadores estáticos,105
Armónicos de intensidad, 107Armónicos de tensión, 106Arrancador estático, 83, 97, 213Arrancador suave, 83, 97, 213Arranque con acoplam. centrífugo, 74Arranque con acoplam. electromag., 79Arranque con acoplam. hidráulico, 75
Arranque con autotransformador, 56,212Arranque con bobinado parcial, 65Arranque con bobinado partido, 69Arranque con motor auxiliar, 68Arranque con red débil, 139
A __ 0•...""0. ........,.•... r¡::oC';C'tpnf"i~ pn p(;;t~t{)r
Arranque con transformador, 56Arranque directo, 48, 212
Arranque en red en isla, 141Arranque estrella-triángulo, 60, 207,2 12
Arranque KUSA, 53Arranque motor varias velocidades, 67Arranque por variación frecuencia, 99Arranque para motores de anillos, 69,
100,212Aumento pérdidas adicionales, 108Autodiagnóstico, 83, 235
Autotransformador, 164,208
Balance energético en arranque, 37Bimetal de protección, 156Bobina de reactancia, 162Bobinadoras y arrolladoras, 29Bombas y ventiladores, 28
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 339/343
322 INDICE ALFABETICO
Calentamiento del estátor, 15, 40, 170Calor almacenado, 4
Calor disipado, 4Campo directo, 45Campo giratorio, 17
Campo inverso, 54Capacidad de cortocircuito de red,
129Cero defectos, 229Circuito equivalente, 14
Clases de aislamiento, 197Clasificación de máquinas, 26
Comparación económica, 224Condensador con arrancador estático,
123Condensador de compensación, 12 3
Conmutador estrella-triángulo, 167Conmutador inversor, 167Constante de tiempo térmica, 173Construcción de jaulas de rotor, 187Construcción del estátor, 189Contactor, 147, 202
Contactor de estado sólido, 232Contactor para autotransformadores,
206Contactor para mol. de rotor
bobinado, 204Contactos auxiliares, 147
Control autoadaptativo, 235Control del frenado, 85Control por aceleración, 86Control por intensidad, 87
Corriente reactiva y aparente, 112
Cuestionario para estudio de arranque,218
Cuproníquel, 188Curva de par motor, 17Curva de par resistente, 17Curva intensidad velocidad, 17, 22Curva par velocidad. 17. 22Curva velocidad tiempo, 42
Deslizamiento, 14, 17Deslizamiento para par máximo, 19,
69Desplazamiento de corriente, 21Dilatación axial, 183
Efecto de armónicos en el motor, 108Elección de contactores, 147, 203
Energ. disipo en estrella-triángulo, 113
Energ. disipo para arrancad. estático,1 1 5
Energía disipada en estátor, 37Energía disipada en rotor, 35. 43Ensayos cualificación de arranques,
1 97
Entrehierro, 14
Escalones del autotransformador, 29Esfuer. axial distrib. irregular temp.,
184Esfuerzos axiales de dilatación. 183
EsfuerLos en bobinado de está tor, 188Esfuerzos en cabezas de est,,1tor, 188Espacio angular. 1 1Especificación de equipos arranque,
222Estrella-triángulo en 3 tiempos, 34Estrella-triángulo sin corte, 35Estrella-triángulo temporizado, 34
Evolución de modos de arranque, 229
Factor de inercia, 41, 73Factor de marcha, 40Factor de potencia, 16
Factor de potencia nominal. 7Fibra óptica, 235Frecuencia de arranques permitida,
181
Freno mecánico, 41Fricción, 16Fuerza radial alterna en barras, 182Fusibles, 148Fusibles extrarrápidos, 149
Golpe de ariete, 89Guardamotor, 167
Incremento del calentamiento, 111Indice de arranque, 69Inercia, 10, 24, 27, 30Inercia equivalente, 31Intensidad de arranque, 16
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 340/343
Intensidad del rotor, 14, 15Intensidad nominal, 16
Intensidad rotórica, 13Interruptor extrarrápido, 1501rregularidad de par resistente, 27
Jaula de ranuras profundas, 21Jaula doble, 21Jaula sencilla, 21
Líneas de alimentación, 133
Magnetotérmico, 92Magnitudes base, 7, 8Mantenimiento predictivo, 226Mantenimiento preventivo, 226Máquina accionada, llMáquinas de elevación, 27Método de un solo cuerpo, 171Método simple para elegir arranque,
218Modelo de los n cuerpos, 175Monitorización, 83, 235Motor crítico por estátor, 41M otor crítico por rotor, 41M otor de anillos o rotor bobinado, 15,
19
Motor de cortocircuito o de jaula, 15,21,48
Motor diseño NEMA, 23
Movimiento uniforme, 12Movimiento uniformemente acelerado,
12
ormaliz. arrancadores estáticos, 233 N úmero de arranques por hora, 4,
27,40 Número de arranques sucesivos, 4, 27,
40
Optimización factor de potencia, 83Optimización rendimiento, 83
Par de arranque, 16
IN DICE ALFABETICO 323
Par máximo, 16Par motor, 4, 10, 16, 41
Par nominal, 16Par parásito, 83, 109Par parásito pulsatorio, 110Par resistente, 10, 24, 41Par resistente de m. alternativas, 1 1
Parada suave, 89Pares resistentes de máquinas, 25Pérdidas Joule adicionales, 108Pérdidas por efecto Joule, 14
Potencia almacenada, 39
Potencia aparente autotransformador,58
Potencia aparente transformador, 58Potencia disipada, 39Potencia electromagnética, 37, 43Potencia nominal, 7, 16Protección mecánica, 84Protección térmica, 84Puente de Graetz, 100
Rampa de tensión, 83Reactancia, 208Reactancia adicional, 54Reactancia de núcleo al aire, 54, 163Reactancia de núcleo de hierro, 163Reactancia equivalente de red, 131Reactancia equivalente de transfo., 132Reactancias en serie con estátor, 54Rectificador no controlado, 100
Regulador de tensión alterna, 83, 94Relación de transformación, 6, 57Relé térmico de protección, 156Relés, 156Relés de frecuencia, 160Relés magnéticos, 160Rendimiento, 17Rendimiento de equipos de arranque,
116
Rendimiento nominal, 7
Reóstato, 20, 71Reóstato líquido, 50, 153Resistencia adicional, 50Resistencia electrolítica, 152Resistencia insertada a pulsos, 100Resistencia rotórica, 18, 70
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 341/343

7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 342/343
• Administración
• Arquitectura
• Biología
• Contabilidad
• Derecho
• Economía
• Electricidad
• Electrónica
• Física• Informática
• Ingeniería
• Marketing
• Matemáticas
• Psicología
• Química
• Serie McGraw-Hill de Divulgación
Científica
• Serie McGraw-HiII de
Electrotecnologías
• Serie McGraw-HiII de Management• Sociología
• Textos Universitarios
OFICINAS IBEROAMERICANAS
ARG EN TIN A
McGraw-Hill/lnteramericana, Ltda.
Suipacha 760 - 5.0 Piso, 01. 26
(1008) Buenos Aires
Tel.: (541) 322 05 70. Fax: (541) 3221538
BRASIL
McGraw-Hill do BRASIL
Rua da Assenbléia, 10/2319
20011-000 Río de Janeiro
Tel. y Fax: (5521) 531 2318
E-mail: internet.centroin.com.brlaaff
CARIBE
McGraw-Hill/lnteramericana del Caribe
Avenida Muñoz Rivera, 1121
Río Piedras
Puerto Rico 00928
Tels.: (809) 751 3451 - 751 2451. Fax: (809) 764 1890
CHILE, PAR AGU AY Y UR UG UAY
McGraw-Hill/lnteramericana de Chile, Ltda.
Seminario, 541 Providencia
Santiago (Chile)
Tel.: (562) 635 17 14. Fax: (562) 6354467
C OL OM B IA , E CU A DO R, B O Lt VIA Y P ER Ú
McGraw-Hill/lnteramericana, S. A.
Apartado 81078
Avenida de las Américas, 46-41
Santafé de Bogotá, D. C. (Colombia)
Tels.: (571) 368 27 00 - 337 78 O O . Fax: (571) 368 74 84
E-mail: [email protected]
ESPAÑA
McGraw-Hill/lnteramericana de España, S. A. U.
Edificio Valreally, Planta l.'
Basauri, 17
28023 Aravaca (Madrid)
Tel.: (341) 372 81 93. Fax: (341) 372 85 13r- __ ". , __ : l&¡o, ••••••••• " •• '-~¡II "',..,
Edificio Vizcaya, 3·'. nivel
Guatemala, Guatemala
Tels.: (502) 332 80 79 al 332 80 84. Fax: (502) 332 81 14
Internet: [email protected]
MÉXICO Y CENTROAMÉRICA
McGraw-Hill/lnteramericana Editores, S. A. de C. V.
Atlacomulco 499-501
Fracc. Ind. San Andrés Atoto
53500 Naucalpan de Juárez
Edo. de México
Tels.: (525) 628 53 53. Fax: (525) 628 53 02
Cedro, 512 - Col. Atlampa
06460 México D. F.
Tels.: (525) 541 67 89. Fax: (525) 547 33 36
Centro Telemarketing
Tels.: (525) 628 53 52 / 628 53 27. Fax: (525) 628 83 60
Lada. sin costo 91 8834 540
PANAMÁ
McGraw-Hill/lnteramericana de Panamá, S. A.
Edificio Banco de Boston, 6.0 piso. Oficina 602,
Calle Elvira Méndez
Panamá, Rep. de Panamá
Tel.: (507) 269 01 11. Fax: (507) 269 20 57
PORTUGAL
Editora McGraw-Hill de Portugal, Ltda.
Estrada de Alfragide, lote 107,
bloco A-l Alfragide
2720 Amadora (Portugal)
Tel.: (3511) 472 85 O O . Fax: (3511) 4718981
US AMcGraw-Hill Inc.
28th. floor 1221 Avenue of the Americas
New York, N.Y. 10020
Tel.: (1212) 512 26 91. Fax: (1212) 512 2186
VENEZUELA
McGraw-Hill/lnteramericana de Venezuela, S. A. An~rt~rto Postal 50785
7/21/2019 Arranque Industr Motores Asincronos Ocr
http://slidepdf.com/reader/full/arranque-industr-motores-asincronos-ocr 343/343
McGRAW-HILUINTERAMERICANA DE ESPAÑA, S. A. U.
División profesional - C/ Basauri, 17 - Edificio Valrealty, 1" planta
28023 Aravaca (MADRID)
Avda. Josep Tarradellas, 27-29, 6" planta
08029 BARCELONA
EN LIBRERíAS
ESPECIALIZADAS
4 FORMAS FÁCILES
Y RÁPIDAS
DE SOLICITAR
SU PEDIDO
Departamento _
C.P. _
País _
Teléfono/Fax _
Nombre y apellidos _
Empresa _
Dirección _
Localidad _
C.I.F.lD.N.I. (/ndíspensableJ _
Correo electrónico _
O Ruego me envíen Inlormación del landa de McGraw-HiII '1 Español O InglésMaterias de interés _
Ruego me envíen el/los siguiente/s título/s:
ISBN _
ISBN _
Autor/Tíl. _
AutorlTít. _
FA X :(91) 372 8513
(93) 430 34 09
INDIQUE LA FORMA OE ENVío:
O Correo
O Agencia/Mensajería. (Gastos de envío no incluidos en el precio de/libro. Consulte con nosotros.)
Autorizo a McGRAW-HILLI/NTERAMER/CANA DE ESPAÑA, S. A. U. a cargar en mí tarjeta e/Importe
del presente pedido:
N.o tarjeta: I~~~_~~~_~~~_~~_~~~_~~~_~~_~~
INDIQUE LA FORMA OE PAGO:
D American Express O VISA O 4B [] MaslerCard
¿ ,1 TE LÉ FO N O S:> - : ~ (91) 372 81 93
U (93) 439 39 05
E -M A IL:[email protected]
WWW
http: www.mcgraw-hill.es
Fecha caducidad I Nombre del titular
Firma ASIN
Sí, envíenme el catálogo de las novedades de McGRAW-HILL en
Informática
Nombre
Empresa
Dirección
Localidad.
C.I.F./N.I.F. (Indispensable)
Correo electrónico .....
o Economía/Empresa
J Español
CiencialTecnología., Inglés
Titulación.
Departamento
Código postal
País
... Teléfono/Fax ..
¿Por qué elegí este libro? Temas que quisiera ver tratadosen futuros libros de McGraw-Hill:
o Renombre del autor
O Renombre McGraw-Hill
O Reseña en prensa
O Catálogo McGraw-Hill
O Buscando en librería
O Requerido como texto
O Precio
O Otros
Este libro me ha parecido:
O Excelente O Muy bueno O Bueno O Regular O MaloComenta ri os .