areview of vessel extraction techniques and …sumbaug/retinalprojectpapers/review of...
TRANSCRIPT

A Review of Vessel Extraction Techniques and Algorithms
CEMIL KIRBAS
Wallace-Kettering Neuroscience Institute
AND
FRANCIS QUEK
Virginia Tech University
Abstract. Vessel segmentation algorithms are the critical components of circulatoryblood vessel analysis systems. We present a survey of vessel extraction techniques andalgorithms. We put the various vessel extraction approaches and techniques inperspective by means of a classification of the existing research. While we have mainlytargeted the extraction of blood vessels, neurosvascular structure in particular, we havealso reviewed some of the segmentation methods for the tubular objects that showsimilar characteristics to vessels. We have divided vessel segmentation algorithms andtechniques into six main categories: (1) pattern recognition techniques, (2) model-basedapproaches, (3) tracking-based approaches, (4) artificial intelligence-based approaches,(5) neural network-based approaches, and (6) tube-like object detection approaches.Some of these categories are further divided into subcategories. We have also createdtables to compare the papers in each category against such criteria as dimensionality,input type, preprocessing, user interaction, and result type.
Categories and Subject Descriptors: A.1 [General Literature]: Introductory andSurvey; I.2.10 [Artificial Intelligence]: Vision and Scene Understanding; I.4[Computing Methodologies]: Image Processing and Computer Vision; I.5[Computing Methodologies]: Pattern Recognition
General Terms: Algorithms, Design, Performance
Additional Key Words and Phrases: Magnetic resonance angiography, medical imaging,neurovascular, vessel extraction, X-ray angiography
1. INTRODUCTION
Blood vessel delineation on medical im-ages forms an essential step in solvingseveral practical applications such as di-agnosis of the vessels (e.g., stenosis ormalformations) and registration of patientimages obtained at different times. Ves-
Authors’ addresses: C. Kirbas, Wallace-Kettering Neuroscience Institute, 3533 Southern Blvd., Suite 5200,Kettering, OH 45429; F. Quek, Center for Human-Computer Interaction, Virginia Tech University, 618McBryde Hall, Blacksburg, VA 24061. Corresponding email: [email protected] to make digital/hard copy of part or all of this work for personal or classroom use is granted with-out fee provided that the copies are not made or distributed for profit or commercial advantage, the copyrightnotice, the title of the publication, and its date appear, and notice is given that copying is by permission ofACM, Inc. To copy otherwise, to republish, to post on servers, or to redistribute to lists requires prior specificpermission and/or a fee.c©2004 ACM 0360-0300/04/0600-0081 $5.00
sel segmentation algorithms are the keycomponents of automated radiological di-agnostic systems. Segmentation methodsvary depending on the imaging modality,application domain, method being auto-matic or semi-automatic, and other spe-cific factors. There is no single segmenta-tion method that can extract vasculature
ACM Computing Surveys, Vol. 36, No. 2, June 2004, pp. 81–121.

82 C. Kirbas and F. Quek
from every medical image modality. Whilesome methods employ pure intensity-based pattern recognition techniques suchas thresholding followed by connectedcomponent analysis [Higgins et al. 1989;Niki et al. 1993], some other methods ap-ply explicit vessel models to extract thevessel contours [Molina et al. 1998; Kleinet al. 1994, 1997]. Depending on the imagequality and the general image artifactssuch as noise, some segmentation meth-ods may require image preprocessing priorto the segmentation algorithm [Guo andRichardson 1998; Sato et al. 1998b]. Onthe other hand, some methods apply post-processing to overcome the problems aris-ing from over segmentation.
We survey current vessel segmenta-tion methods, covering both early andrecent literature related to vessel seg-mentation algorithms and techniques. Ap-plication domain of these techniques in-cludes; (i) extraction of neurovascularstructures, (ii) retinal blood vessel seg-mentation, (iii) coronary artery extration,(iv) extraction of blood vessels from mam-mograms, (v) human airway tree (pul-monary tree) segmentation, (vi) extrac-tion of abdominal aorta and vascularstructures in the legs, (vii) extraction ofvascular structures in livers, (viii) colonextraction, (ix) segmentation of nervechannels, and (x) extraction of tubularstructures for industrial and scientificapplications.
We introduce each segmentationmethod category and briefly summarizepapers by category. We aim to give a quicksummary of the papers and refer inter-ested readers to references for additionalinformation. At the end of each section, weprovide a table and compare the methodsreviewed in that section. The comparisonincludes segmentation method category,input image type such as XRA, MRA,MRI, CT, etc., dimensionality, use of apriori knowledge, whether the methodemploys multi-scale technique, user in-teraction requirement, result type suchas centerline, vessel edges, and junctions,and whether the method segments thewhole vessels tree or not.
Interested readers are referred to sev-eral surveys on medical image segmenta-tion and analysis in general [McInerneyand Terzopoulos 1996; Chen et al. 1999;Ayache 1994; Duncan and Ayache 2000;Clarke et al. 1995], and vessel visual-ization and quantification in particular[Felkel et al. 2001; Buhler et al. 2002] forfurther reading.
This article is organized as follows: InSection 2, the classification of the extrac-tion methods is given. In Section 3, pat-tern recognition techniques are reviewed.Model-based approaches are discussed inSection 4. In Section 5, tracking-basedapproaches are reviewed. Methods basedon artificial intelligence are discussed inSection 6. In Section 7, neural network-based methods are reviewed. In Section 8,algorithms that are not particularly de-signed to extract vessels but deal with ex-traction of tubular objects are discussed.We conclude with discussion on the issuesrelated to vessel extraction and its appli-cations in Section 9.
2. CLASSIFICATION OF VESSELEXTRACTION TECHNIQUES ANDALGORITHMS
We did not enforce any taxonomy at thebeginning of writing this survey. Instead,we put papers that use similar approachesinto same group while we review them.During the categorization, we tried to beas specific as possible. For this reason wedivided some categories into subcategoriesas necessary. We also created a separatecategory for some methods that are usedsignificantly. For example, we created aseparate category for generalized cylin-ders model approach even it is a paramet-ric model because of the amount of workdone using this model.
I. Pattern recognition techniquesA. Multi-scale approachesB. Skeleton-based approachesC. Region growing approachesD. Ridge-based approachesE. Differential geometry-based ap-
proaches
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
Vessel Extraction Techniques and Algorithms 83
F. Matching filters approachesG. Mathematical morphology sche-
mesII. Model-based approaches
A. Deformable modelsa. Parametric deformable models–
Active contours (Snakes)b. Geometric deformable models
and front propagation methodsc. Deformable template matching
approachesB. Parametric modelsC. Generalized cylinders approaches
III. Tracking-based approachesIV. Artificial Intelligence-based approa-
chesV. Neural Network-based approaches
VI. Tube-like object detection approaches
Although we divide segmentation meth-ods in different categories, sometimesmultiple techniques are used togetherto solve different segmentation problems.We, therefore, cross-listed the methodsthat fall into multiple segmentation cate-gories. Such methods are reviewed in onesection and mentioned in the other sectionwith a pointer referencing to the section inwhich it is reviewed.
3. PATTERN RECOGNITION TECHNIQUES
Pattern recognition (PR) techniques dealwith the automatic detection or classifi-cation of objects or features. Humans arevery well adapted to carry out PR tasks.Some of the PR techniques are the adap-tion of human PR ability to the computersystems. In the vessel extraction domain,PR techniques is concerned with the de-tection of vessel structures and the ves-sel features automatically. We divide PRtechniques into seven categories: (1) mul-tiscale approaches, (2) skeleton-based(centerline detection) approaches, (3) re-gion growing approaches, (4) ridge-basedapproaches, (5) differential Geometry-based approaches, (6) matching filters ap-proaches, and (7) mathematical morphol-ogy schemes. In the next sections, each
category is discussed and the literature re-lated to each category is reviewed.
3.1. Multi-scale Approaches
Multi-scale approaches perform segmen-tation at varying image resolutions. Themain advantage of this technique is in-creased processing speed. Major struc-tures (large vessels in our application do-main) are extracted from low resolutionimages while fine structures are extractedat high resolution. Another advantage isincreased robustness. After segmentingthe strong structures at the low resolution,weak structures, such as branches, in theneighborhood of the strong structures canbe segmented at higher resolution.
Sarwal and Dhawan [1994] reconstruct3D coronary arteries from three viewsby matching branch points in each view.Their method is based on simplex method-based linear programming and relaxation-based consistent labeling. To improve therobustness of the matcher, matching pro-cess is performed at three different reso-lutions. The stronger vessel tree branchesare extracted at lower resolution while theweaker branches are extracted at higherscale. The extracted vessel tree is used for3D reconstruction.
Chwialkowski et al. [1996] employ mul-tiresolution analysis based on wavelettransform. Their work aims at automatedqualitative analysis of arterial flow usingvelocity-sensitive, phase contrast MR im-ages. The segmentation process is appliedto the magnitude image and the velocityinformation from the phase difference im-age is integrated on the resulting vesselarea to get the blood flow measurement.Vessel boundaries are localized by employ-ing a multivariate scoring criterion to min-imize the effect of imaging artifacts suchas partial volume averaging and flow tur-bulence. This method can also be classifiedas a contour detection approach.
The works of Summers and Bhalerao[1995] described in Section 4.1.3, Huangand Stockman [1993] described inSection 8, and Armande et al. [1999] de-scribed in Section 3.3 employ a multiscale
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

84 C. Kirbas and F. Quek
approach and can also be listed in thissection.
3.2. Skeleton-Based (Centerline Detection)Approaches
Skeleton-based methods extract blood ves-sel centerlines. The vessel tree is createdby connecting these centerlines. Differentapproaches are used to extract the cen-terline structure. Some of these methodsare: (i) apply thresholding and then objectconnectivity, (ii) thresholding followed bya thinning procedure, and (iii) extractionbased on graph description. The resultingcenterline structure is used for 3D recon-struction.
Niki et al. [1993] describe a 3Dblood vessel reconstruction and anal-ysis method. Vessel reconstruction isachieved on short scan cone-beam fil-tered back-propagation reconstruction al-gorithm based on Gulberg and Zeng’s work[Gullberg and Zeng 1992]. A 3D thresh-olding and 3D object connectivity proce-dure are applied to the resulting recon-structed images for the visualization andanalysis process. A 3D graph descriptionof blood vessels is used to represent thevessel anatomical structure.
Tozaki et al. [1995] extract bronchusand blood vessels from thin slice CT im-ages of the lung for 3D visualization andanalysis. First, a threshold is used to seg-ment the images. Then, blood vessels andbronchus are differentiated by using theiranatomical character (e.g., the bronchuscontain air). Finally, a 3D thinning algo-rithm is applied to extract the vessel cen-terlines. The resulting centerline struc-ture is used to analyze and classify theblood vessels. Their work helps in early de-tection of tumors of lung cancer patients.
Kawata et al. [1995a] analyze bloodvessel structures and detect blood vesseldiseases from cone-beam CT images. X-ray digital angiograms are collected us-ing rotational angiography. 3D image re-construction is performed by a short scancone-beam filtered backprojection algo-rithm based on the short injection timeof the contrast medium. First, a graphdescription procedure extracts the curvi-
linear centerline structures of the vesseltree using thresholding, elimination of thesmall connected components, and 3D fu-sion processes. Then, a 3D surface repre-sentation procedure extracts the charac-teristics of convex and concave shapes onblood vessel surface. The algorithm is runon a set of patient images with abdominalblood vessels, with two aneurysms and onestenosis, and the results are shown.
Kawata et al. [1995b] detect blood vesseldiseases on high resolution 3D cone-beamCT images. This method has two majorcomponents: (1) A graph description pro-cedure extracts a graph description of ves-sel centerlines from the vessel image; (2) Asurface representation procedure extractsconcave and convex shapes on vessels us-ing curvature. These shapes are used torepresent aneurysms and stenoses on thevessels. Vessel surfaces are representedby curvatures which are invariant to ar-bitrary translations and rotations. Sur-face characteristics such as Gaussian (K)and mean (H) curvatures, principal di-rections, surface normal direction, curva-ture magnitude, and surface types usingsigns of K and H can be obtained eas-ily from the surface representation us-ing curvatures. Since blood vessels’ sur-faces are represented using curvatures,this work can also be classified as a differ-ential geometry-based approach listed inSection 3.5.
Parker et al. [1988] gives a theoreti-cal review of 3D reconstruction algorithmof vascular networks from X-ray projec-tion images. The algorithm has two steps:(1) Segmenting the centerline positionsand densimetric profiles of artery can-didates from each projection image; and(2) Combining multiple view informationgathered in step one into one 3D arteryrepresentation in an iterative fashion.Their work utilizes intrinsic vascular bedproperties such as connectivity, density,and lumen dimensions in the reconstruc-tion process.
Sorantin et al. [2002] uses a 3D skele-tonization method in the assessment oftracheal stenoses on spiral CT images. Themethod consists of five steps: (1) Laryngo-tracheal tract (LTT) is segmented using
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 85
Fig. 1. (a) An MRI slice, and (b) Associated 2D intensity map in 3D (Reproducedfrom Aylward et al. [1996]).
fuzzy connectedness. The system extractsLTT as a single object starting from a user-supplied seed point. A 3D dilation is em-ployed to handle the uncertain boundarypoints due to partial volume effect. Thesegmented binary 3D volume is, then, con-verted into cubic voxels by linear interpo-lation; (2) 3D thinning operation is appliedto the resulting 3D volume; (3) LLT me-dial axis is separated from the extractedskeleton using a shortest path-searchingalgorithm. This step requires the user tomark begin end end points on the cen-tral path; (4) Segmented LTT medial axis,represented by a sequence of vectors, issmoothed; and (5) LTT cross-sectional pro-file along the medial axis is calculated.The technique is reported as “highly ac-curate and precise” based on the phantomstudies.
The works of Poli and Valli [1997]reviewed in Section 3.6, Mao et al. [1992]reviewed in Section 3.6, Prinet et al. [1996,1997], reviewed in Section 3.5, Eiho andQian [1997] and Haris et al. [1997a]reviewed in Section 3.7, O’Brien andEzquerra [1994] reviewed in Section 3.4,Yim et al. [2000] reviewed in Section 3.4,Higgins et al. [1989] reviewed inSection 3.4, and Armande et al. [1999] de-scribed in Section 3.3 can also be classifiedas a skeleton-based approach due to theskeleton detection in the segmentationprocess.
3.3. Ridge-Based Approaches
Ridge-based methods treat grayscale im-ages as 3D elevation maps in which in-tensity ridges approximate the skeletonof the tubular objects [Aylward et al.1996]. Figure 1 shows a MRI slice andits corresponding 2D intensity height sur-face in 3D. After creating the inten-sity map, ridge points are local peaks inthe direction of maximal surface gradi-ent, and can be obtained by tracing theintensity map from an arbitrary point,along the steepest ascent direction. Ridgesare invariant to affine transformationsand can be detected in different imagemodalities. These properties are exploitedin medical image registration [Aylwardet al. 1996, 2002; Aylward and Bullitt2001]. Since ridge-based approaches de-tect skeleton of tubular objects, it can bethought of as a specialized skeleton-basedapproaches.
Bullitt and Aylward [2001] describetheir method of defining vessel trees from3D image volume. The segmentation stagestarts with a manually-selected seed pointfor each vessel. The system extracts anintensity ridge map which represents thevessel’s medial axis. Vessel width at eachridge point is also calculated using a scale-based approach. The vessel tree is repre-sented by a graph where each vessel keepsinformation about its relationship to other
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

86 C. Kirbas and F. Quek
vessels. Some other publications of the au-thors describe the issues related to seg-mentation and graph description in detail[Aylward et al. 1996; Bullitt et al. 1999,2001; Aylward and Bullitt 2002]. The mainapplication of this work is the registrationof vasculature images obtained from thesame patient at different times. This al-lows the observation of changes in pathol-ogy over time.
Guo and Richardson [1998] propose aridge extraction method that treats dig-itized angiograms as height maps andthe centerlines of the vessels as ridgesin the map. The image is first balancedby a median filter and then smoothed bya nonlinear diffusion method (anisotropicsmoothing). Then, a region of interest isselected by adaptive thresholding method.This process cuts the cost of the ridge ex-traction process and reduces false ridgesintroduced by noise. Next, the ridge detec-tion process is applied to extract the ves-sel centerlines. Finally, the candidate ves-sel centerlines are connected using a curverelaxation process.
Aylward et al. [1996] approximate themedial axes of tubular objects such as ves-sels in an angiogram as directed “inten-sity ridges”. They apply the cores method[Pizer et al. 1998] which has been provento be invariant to a wide range of noise andobject disturbances. Ridges are trackedby estimating the local vessel directions.First, image intensity is mapped to heightto create intensity height surface. Sec-ond, from a user-supplied starting pointan initial ridge point is found using aconjugate directions search with respectto the Hessian matrix. Third, the ridgeis tracked. Finally, the local widths ofthe segmented object is estimated usingpoints on the ridges. The authors showresults of a vascular tree extracted froma MR angiogram. This required a fairamount of user intervention (105 mouseclicks in all). Figure 2 shows the extractedvascular tree.
The work of Chandrinos et al. [1998]described in Section 5 can also be clas-sified as a ridge-based approach due tothe ridge detection in the segmentationprocess.
Fig. 2. Vessel tree extracted from105 mouse clicks (Reproduced fromAylward et al. [1996]).
3.4. Region Growing Approaches
Starting from some seed point, regiongrowing techniques segment images byincrementally recruiting pixels to a re-gion based on some predefined criteria.Two important segmentation criteria arevalue similarity and spatial proximity[Jain et al. 1995]. It is assumed that pix-els that are close to each other and havesimilar intensity values are likely to be-long to the same object. The main disad-vantage of region growing approach is thatit often requires user-supplied seed points.Due to the variations in image intensi-ties and noise, region growing can resultin holes and over-segmentation. Thus, itrequires post-processing of the segmenta-tion result.
Schmitt et al. [2002] determine contrastagent propagation in 3D rotational XRAimage volumes. They combine threshold-ing with a region growing technique tosegment vessel tree in 3D. The optimalthreshold is determined experimentally.After the segmentation, propagation infor-mation is mapped from the 2D projectionsto the 3D image data set created by therotational XRA.
O’Brien and Ezquerra [1994] automat-ically segment coronary vessels in an-giograms based on temporal, spatial,and structural constraints. The algorithmstarts with a low pass filtering applied tothe image as preprocessing. Then, initialsegmentation starts with a user-supplied
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 87
Fig. 3. (a) The original XRA image, (b) Initial segmentation and expansion results, and (c) Thefinal result (Reproduced from O’Brien and Ezquerra [1994]).
seed point. The system starts a regiongrowing process to extract the initial ap-proximation to the vessel structure. Afterthat, the centerlines are extracted by em-ploying a balloon test. Next, undetectedvessel segments are located by a spatialexpansion algorithm. At this stage, imagesare divided into two categories: vessel ar-eas and nonvessel areas. However, there isno spatial or temporal connectivity infor-mation exists in the detected sub-regions.This information is extracted by apply-ing an acceptance and rejection test usinggraph theory. Figure 3 shows the resultof their method applied to an angiogramimage. Due to the extraction of the cen-terlines, this work can also be classifiedas a skeleton-based approach listed inSection 3.2.
Higgins et al. [1989] describe theirautomatic arterial tree extraction al-gorithm from 3D coronary angiograms.These angiograms are obtained from high-resolution X-ray CT scanner known as3D Dynamic Spatial Reconstructor (DSR).Their algorithm is a combination of a 3Dfilter, a connected component analysis, athresholding process, and seeded regiongrowing algorithm. The strength of the al-gorithm is reported as the results beingreproducible, requiring less user time, andworking in 3D. Due to the skeleton detec-tion process performed, this work can alsobe classified as a SBA listed in Section 3.2.
Yim et al. [2000] determine vessel treestructures from MRA images using a agray-scale skeletonizing method based on
the ordered region-growing algorithm thatrepresents the image as an acyclic graphusing the image voxels connectivity. A dis-tinctive feature of this method is thatthe path used in the graph has minimaldependence on seed location that makesthe method reliable on every part of thegraph, not only in the vicinity of the seedpoint. After forming the acyclic graph, askeletonizing process is applied to extractthe tree in two different methods. In thefirst method, user explicitly selects theorigin, which serves as the seed point ofthe graph, of the tree and endpoints ofthe vessels. Then, vessel segments are ex-tracted by tracing the path from each end-point to the origin of the graph. The sec-ond method uses a pruning process basedon the branch length. It requires a user-supplied seed point and two parametersthat describe the desired topology of thetree. The method retains vessel segmentswhich have the length more than the spec-ified length and discards the others. Theordered region growing method resolvesthe ambiguities in the tree branching dueto vessel overlap by incorporating a prioriknowledge about the bifurcation spacing.Due to the skeletonization process appliedto extract tree, this work can also be clas-sified as a skeleton-based approach listedin Section 3.2.
Higgins et al. [1996] develop a sys-tem to extract, analyze, and visualizecoronary arteries from high-resolution 3Dangiograms using Artery Extractor, TreeTrace, and Artery Display tools created.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

88 C. Kirbas and F. Quek
The steps in arterial tree extraction are asfollows: (1) A 3D image filter is applied toreduce the noise and artifact effects; (2) Athresholding operation is performed to iso-late large and very bright regions whichform the seed regions of the tree; (3) Aniterative 3D seeded region growing algo-rithm is employed to build up the treefrom the seed regions; and (4) A cavity fill-ing process is applied to add the cavitiesmissed during seeded region growing pro-cess. After the tree is extracted, an axesgeneration process is employed to get theskeleton as follows: (1) The large aorticroot is removed to leave the tree branches;(2) 3D skeleton of all branches is computedusing an iterative skeletonization processthat uses 26-connectivity; (3) The skeletalcomponents of useless short branches arepruned; and (4) Remaining skeletal com-ponents are combined into line segments.
The work of Donizelli [1998] reviewedin Section 3.7 can be classified as a regiongrowing approach due to the binary regiongrowing algorithm applied.
3.5. Differential Geometry-BasedApproaches
Differential geometry (DG)-based meth-ods treat images as hypersurfaces and ex-tracts features using the curvature andthe crest lines of the surface. The crestpoints of the hyper-surface correspond tothe center lines of the vessel structure.The 2D and 3D images are treated sim-ilarly, being modelled as 3D and 4D hy-persurfaces respectively. In DG, a 3D sur-face can be described by two principalcurvatures and by their corresponding or-thogonal directions, called principal direc-tions. These features are also invariantunder affine transformations and there-fore well-suited to medical image regis-tration [Gueziec et al. 1997; Gueziec andAyache 1994; Ayache et al. 1993]. Theprincipal curvatures correspond to theeigenvalues of the Weingarten matrix andthe principal directions are the eigenvec-tors. Crest points, which are the intrin-sic properties of the surfaces, are the localmaxima of the maximum curvature on thehypersurface. Crest lines are intuitively
the most salient features of the surfaces.Centerlines are obtained by linking thecrest-points.
A good introduction to differential ge-ometry can be found in Do Carmo [1976]and Koenderink [1990].
Krissian et al. [1996] describe theirDirectional Anisotropic Diffusion (DAD)method derived from Gaussian convolu-tion to reduce the image noise. Theirmethod, a more general form of work byPerona and Malik [1990], is based on thedifferentiation of the diffusion in the di-rection of the gradient, minimum, andmaximum curvatures. DAD reduces thenoise in the image without introducingblurring. The algorithm is applied to aset of phantom images containing toruswith different radii and a set of vessel im-ages. A comparison of the results of theanisotropic diffusion and Gaussian convo-lution method is given.
Prinet et al. [1997] propose a multidi-mensional vessel extraction method thattreats images as parametric surfaces andextracts features of the images using sur-face curvature and the crest lines. Whenlinked together, the crest points form thecenter lines of the vessels. Results of thealgorithm applied to angiograms, 2D Digi-tal Subtraction Angiography (DSA), Mag-netic Resonance Angiography (MRA), and3D synthetic data are reported. Due to thecenterline detection performed, this workcan also be classified as a skeleton-basedapproach listed in Section 3.2.
Prinet et al. [1996] describe the frame-work of their thin network extractionalgorithm from volumetric images. Themethod uses differential geometry of thesurfaces and treats 3D image volume as ahyper surface of 4D. The fact that the crestpoints of the hyper-surface correspond tothe center line of the thin network in thevolume image is utilized in the technique.A cylindrical mathematical model is usedto represent the vessels. Vessel networkis extracted by detecting the extrema ofthe maximal curvatures, that is, the crestpoints. The technique requires no a pri-ori knowledge on the shape of the networkand is entirely automatic. Due to the cen-terline detection performed, this work can
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
Vessel Extraction Techniques and Algorithms 89
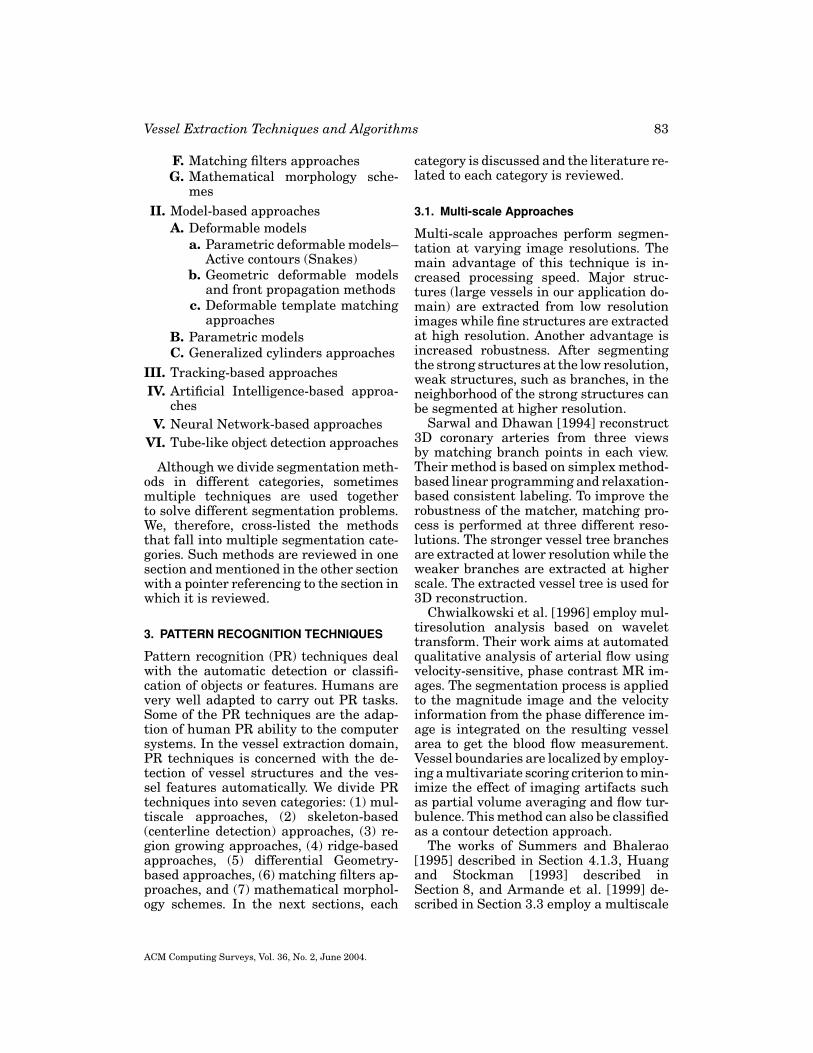
Fig. 4. (a) DSA image of the cerebral vessels, and (b) Vessel detection using fourvalues of the scale (Reproduced from Armande et al. [1999]).
also be classified as a skeleton-based ap-proach listed in Section 3.2.
Armande et al. [1999] extract thin netsusing a MSA that exploits the DG proper-ties of the image surface. They character-ize thin nets as crest lines of the imagesurface. To overcome the problem facedin extraction of the thin nets having dif-ferent widths, they employ a MSA. Theirmethod consists of three main stages:(1) They detect the extrema of the max-imum curvature for all scales; (2) Theyremove false responses, using the gra-dient zero-crossings; and (3) They selectthose points verified by medium scale ex-pression as crest points. In some otherworks, they used similar approach in dif-ferent application domains [Monga et al.1994a, 1994b, 1997; Armande et al. 1995].Figure 4 shows a DSA image and the ex-tracted vessel network using four differentscales. This work can also be classified asa MSA listed in Section 3.1.
The work of Zana and Klein [1997] de-scribed in Section 3.7 can be classified as adifferential geometry-based approach dueto the curvature differentiation procedureapplied in the final step to extract thevessels.
The work of Kawata et al. [1995b] de-scribed in Section 3.2 can be classified as adifferential geometry-based approach dueto the representation of the blood vessels’surfaces using curvatures.
3.6. Matching Filters Approaches
Matching filters approach convolves theimage with multiple matched filters forthe extraction of objects of interest. In ex-tracting vessel contours, designing differ-ent filters to detect the vessels with dif-ferent orientation and size plays a crucialrole. The convolution kernel size affectsthe computational load. Matching filtersare usually followed with some otherimage processing operations like thresh-olding and connected component analy-sis to get the final vessel contours. Con-nected component analysis is precededby a thinning process to detect vesselcenterlines.
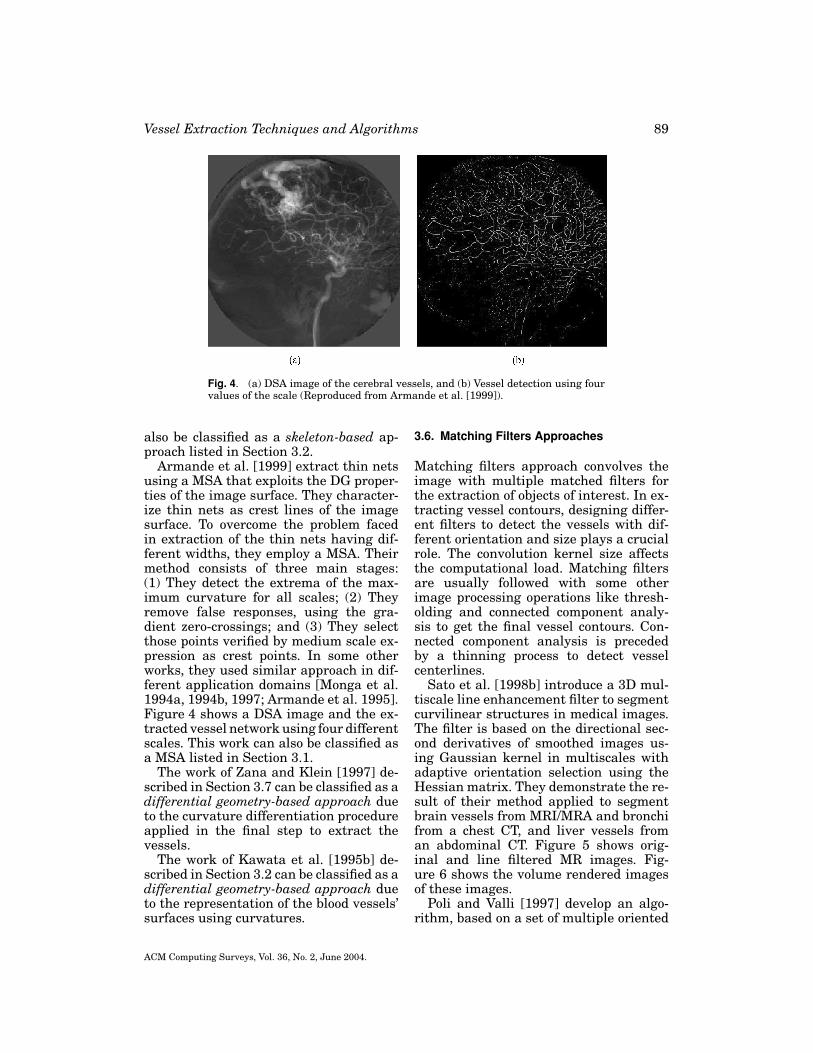
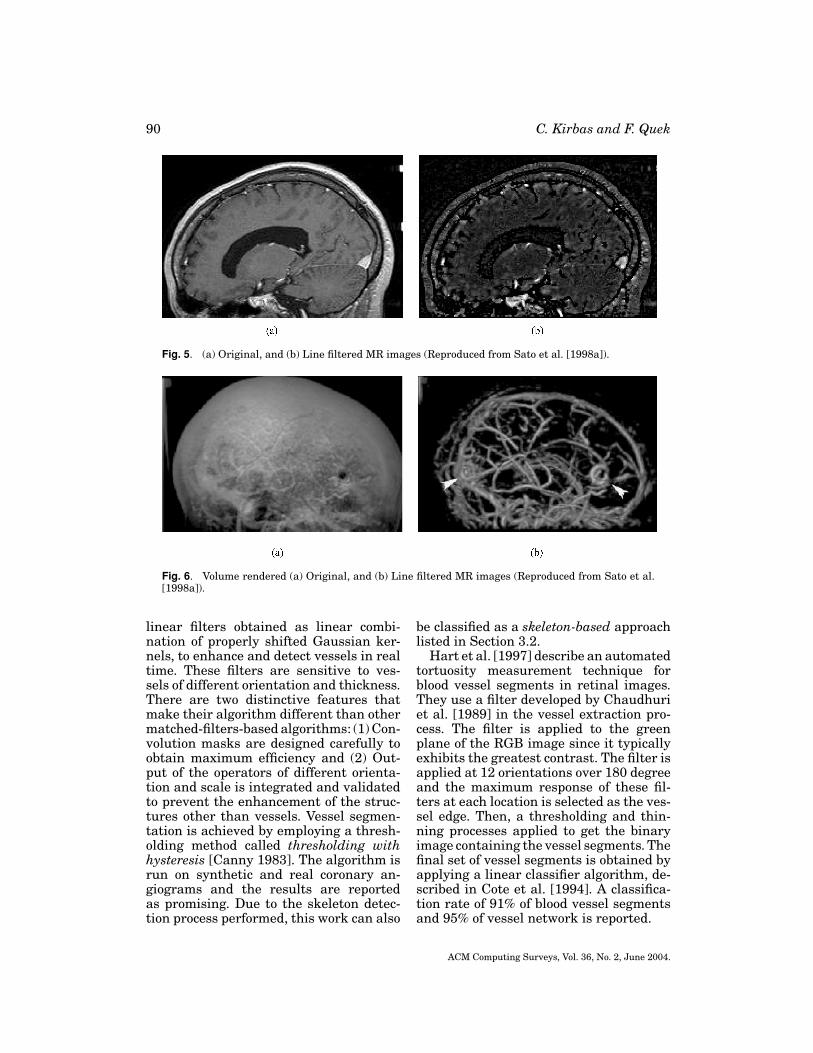
Sato et al. [1998b] introduce a 3D mul-tiscale line enhancement filter to segmentcurvilinear structures in medical images.The filter is based on the directional sec-ond derivatives of smoothed images us-ing Gaussian kernel in multiscales withadaptive orientation selection using theHessian matrix. They demonstrate the re-sult of their method applied to segmentbrain vessels from MRI/MRA and bronchifrom a chest CT, and liver vessels froman abdominal CT. Figure 5 shows orig-inal and line filtered MR images. Fig-ure 6 shows the volume rendered imagesof these images.
Poli and Valli [1997] develop an algo-rithm, based on a set of multiple oriented
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
90 C. Kirbas and F. Quek
Fig. 5. (a) Original, and (b) Line filtered MR images (Reproduced from Sato et al. [1998a]).
Fig. 6. Volume rendered (a) Original, and (b) Line filtered MR images (Reproduced from Sato et al.[1998a]).
linear filters obtained as linear combi-nation of properly shifted Gaussian ker-nels, to enhance and detect vessels in realtime. These filters are sensitive to ves-sels of different orientation and thickness.There are two distinctive features thatmake their algorithm different than othermatched-filters-based algorithms: (1) Con-volution masks are designed carefully toobtain maximum efficiency and (2) Out-put of the operators of different orienta-tion and scale is integrated and validatedto prevent the enhancement of the struc-tures other than vessels. Vessel segmen-tation is achieved by employing a thresh-olding method called thresholding withhysteresis [Canny 1983]. The algorithm isrun on synthetic and real coronary an-giograms and the results are reportedas promising. Due to the skeleton detec-tion process performed, this work can also
be classified as a skeleton-based approachlisted in Section 3.2.
Hart et al. [1997] describe an automatedtortuosity measurement technique forblood vessel segments in retinal images.They use a filter developed by Chaudhuriet al. [1989] in the vessel extraction pro-cess. The filter is applied to the greenplane of the RGB image since it typicallyexhibits the greatest contrast. The filter isapplied at 12 orientations over 180 degreeand the maximum response of these fil-ters at each location is selected as the ves-sel edge. Then, a thresholding and thin-ning processes applied to get the binaryimage containing the vessel segments. Thefinal set of vessel segments is obtained byapplying a linear classifier algorithm, de-scribed in Cote et al. [1994]. A classifica-tion rate of 91% of blood vessel segmentsand 95% of vessel network is reported.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 91
Wood et al. [1995] equalizes image vari-abilities as a preprocessing step in theirmethod to segment retinal vessels. Imageequalization is achieved by computing a lo-cal two dimensional average and subtract-ing from each pixel. This procedure nor-malizes the variation in the backgroundlevel before edge detection. Then, a non-linear morphological filtering method isused to locate the vessel segments. Themethod is demonstrated on two images ofthe same patient taken at different times.Two images are thresholded resulting intwo binary images from which the ves-sel structures are extracted. The result-ing coordinate system is used to registerthe images and to remove the interferencefrom the vessel structure for the analysisof the underlying retinal nerve fiber layer(RNFL).
Mao et al. [1992] describe their algo-rithm to extract structural features indigital subtraction angiograms. The algo-rithm is based on the visual perceptionmodeling which states that the relevantparts of objects in noisy scenes are usu-ally grouped together. A saliency map isconstructed by grouping salient structuresor curves iteratively. Centerlines and con-tours obtained from the structural fea-ture extraction algorithm are, then, usedto refine the extraction process. The prob-lem with this algorithm is that it doesnot successfully solve all the 2D ambi-guities such as crossing or forking situa-tions. This method is aimed to detect thevascular structures from two X-ray pro-jections for 3D reconstruction of vascularnetwork. Due to the centerline detectionperformed, this work can also be classi-fied as a skeleton-based approach listed inSection 3.2.
Hoover et al. [2000] combine local andregion-based properties to segment bloodvessels in retinal images. The method ex-amines the matched filter response (MFR)[Chaudhuri et al. 1989], using a probingtechnique. The technique classifies pixelsin an area of the MFR as vessels andnonvessels by iteratively decreasing thethreshold. At each iteration, the probe ex-amines the region-based attributes of thepixels in the tested area and segments
the pixels classified as vessels. Pixels thatare not classified as vessel from probesare recycled for further probing. A uniquefeature of this method is that each pixelis classified using local and region-basedproperties. The method is evaluated usinghand-labeled images and tested againstbasic thresholding of MFR. As much as15 times reduction of false positives overthe basic MFR and up to 75% true positiverate has been reported.
Chen et al. [1998, 2000] develop amethod to segment lines, especially in-tersections (X-junctions) and branches(T-junctions), in multiple orientation us-ing orientation space filtering technique.The unique feature of this method is thatimage is represented by what is called ori-entation space by adding orientation axisto the abscissa and the ordinate of theimage. The orientation space representa-tion is then treated as continuous vari-able to which Gabor filters, which repre-sent lines at multiple orientations, can betuned. Multiple orientation line detectionis achieved by thresholding 3D image ofthe orientation space and then detectingthe connected components in the result-ing image. Selecting suitable bandwidthfor the Gabor filter is an important issuethat effects the sensitivity of the filters tothe lines. If the orientation bandwidth issmall, the orientation selectivity is high.On the other hand, the response of a linehaving a high degree of curvature is smallwhich means the sensitivity of the line islow. This feature requires a trade-off be-tween sensitivity and selectivity for opti-mum multiple orientation line segmenta-tion. The method is tested on synthesizedand real biomedical images and the re-sults are discussed.
The work of Goldbaum et al. [1996] re-viewed in Section 3.6 can be classified asa matching filters approach due to the ro-tated matched filters used in the segmen-tation process.
The work of Thirion et al. [2000] re-viewed in Section 8 can be classified as amatching filters approach due to the bankof filters used in the segmentation process.
The work of Huang and Stockman[1993] reviewed in Section 8 can be
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

92 C. Kirbas and F. Quek
classified as a matching filters approachdue to the optimal filters used in the seg-mentation process.
The works of Klein et al. [1994, 1997]reviewed in Section 4.1.1 can be classifiedas a matching filters approach due to thebank of orientation specific S-Gabor filterpairs used.
3.7. Mathematical Morphology Schemes
Morphology relates to the study of objectforms or shapes. Morphological operators(MO) apply structuring elements (SE) toimages, and are typically applied to bi-nary images but can be extended to thegray-level images. Dilation and erosionare the two main MO. Dilation expandsobjects by a SE, filling holes, and con-necting disjoint regions. Erosion shrinksobjects by a SE. Closing, dilation fol-lowed by erosion, and opening, erosionfollowed by dilation, are two other oper-ations. Two algorithms used in medicalimage segmentation and related to mathe-matical morphology are top hat and water-shed transformations [Sonka and Hlavac1999].
A good introduction to morphological op-erators can be found in Umbaugh [1998]and Jain et al. [1995].
Figueiredo and Leitao [1995] describetheir nonsmoothing approach in estimat-ing vessel contours in angiograms. Theirtechnique has two key features: (1) It doesnot smooth the image to avoid the distor-tions introduced by smoothing; and (2) Itdoes not assume a constant backgroundwhich makes the technique well suited forthe unsubtracted angiograms. Edge detec-tion is achieved by adapting a morpho-logical (nonlinear) gray scale edge oper-ator. Linear operators, such as matchedfilters or derivative-based schemes, wouldnot work under the assumptions men-tioned above. All local maxima, for eachvessel cross section, of the morphologicaledge detector are considered as candidateedge points. Then dynamic programmingis used to find the minimum cost pathamong the candidates by selecting a pairfor each cross-section. Continuity and in-tensity terms are used as adapted costs
in the process of selecting candidate edgepoints.
Haris et al. [1997a] combined a recur-sive sequential tracking algorithm andmorphological tools of homotopy modifi-cation and watersheds to automaticallyextract coronary arteries from angiogramimages. Initial segmentation of artery treeskeleton is achieved through a trackingmethod based on circular template anal-ysis. The result of this process is an ap-proximation of artery tree skeleton alongwith estimates of the artery width ateach point. Then, the morphological toolsof homotopy modification and watershedtransform are used to analyze each arterysegment for the accurate border extrac-tion. Authors of the article admit that thesystem has problem in extracting com-plete coronary tree. Due to the skele-tonization of artery tree, this work can alsobe classified as a skeleton-based approachlisted in Section 3.2.
Eiho and Qian [1997] propose a methodbased on pure MO to detect coronaryartery tree in cine-angiograms. The stepsof the method are: (1) A top-hat opera-tor is applied to enhance the shape ofthe vessels; (2) Morphological erosion fol-lowed by half-thresholding operations areapplied to remove the areas that are notthe coronary artery; (3) Starting from auser-supplied point on the tree, the systemextracts whole tree using neighbor check-ing according to the average gray lev-els; (4) The extracted artery tree is skele-tonized by the thinning operation; (5) Theedges are extracted by applying watershedtransformation on the binary image ob-tained from a dilation operation on the bi-nary skeleton. Due to the skeletonizationof artery tree, this work can also be classi-fied as a skeleton-based approach listed inSection 3.2.
Donizelli [1998] combines mathemati-cal morphology and region growing algo-rithms to segment large vessels from DSAimages. First, mathematical ”top-hat” al-gorithm, which is a morphological filter toextract line-like structures, is applied toextract large vessels. Then, a binary re-gion growing algorithm is applied to getrid of some residual shorter capillaries
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 93
and background noise artifacts. Finally,a threshold is applied to eliminate smallregions and to obtain the regions of thelarge vessels. The author implementedthree other classical and morphologicalalgorithms, multiphase analysis process(MRAP) [Stansfield 1986], region splittingapproach (RSBA) [Kottke and Sun 1990a],and morphological-thresholding (ROSE)[Thackray and Nelson 1993], and com-pared with his method. Due to the binaryregion growing algorithm employed, thiswork can also be classified as a regiongrowing approach listed in Section 3.4.
Zana and Klein [1997] present a ves-sel segmentation algorithm from retinalangiography images based on mathemat-ical morphology and linear processing. Aunique feature of the algorithm is thatit uses a geometric model of all possibleundesirable patterns that could be con-fused with vessels in order to separate ves-sels from them. As a first step, all brightround peaks are extracted that allowsmicroaneurisms to be segmented fromthe angiograms of diabetic patients. Thestrength of the algorithm comes from thecombination of mathematical morphol-ogy and differential operators in the seg-mentation process. Linear bright shapesand basic features are extracted usingmathematical morphology operators anddifferential shape properties like curva-ture are computed using a Laplacian fil-ter. Vessels are extracted using curva-ture differentiation in the final step. Thiswork can also be classified as a differ-ential geometry-based approach listed inSection 3.5.
Thackray and Nelson [1993] describean approach which extracts vascular seg-ments using a set of 8 morphological oper-ators, each of which represents an orientedvessel segment. The system also appliesan adaptive thresholding scheme to ex-tract the vascular segments from the in-tensity image. The system was used toextract vessel segments in a capillary an-giogram of mice, and does not extract thevascular interconnection structure. Therange of vessel widths the system handlesappears limited by the setting of the 8 mor-phological operators.
3.8. 3D Reconstruction of Vessels
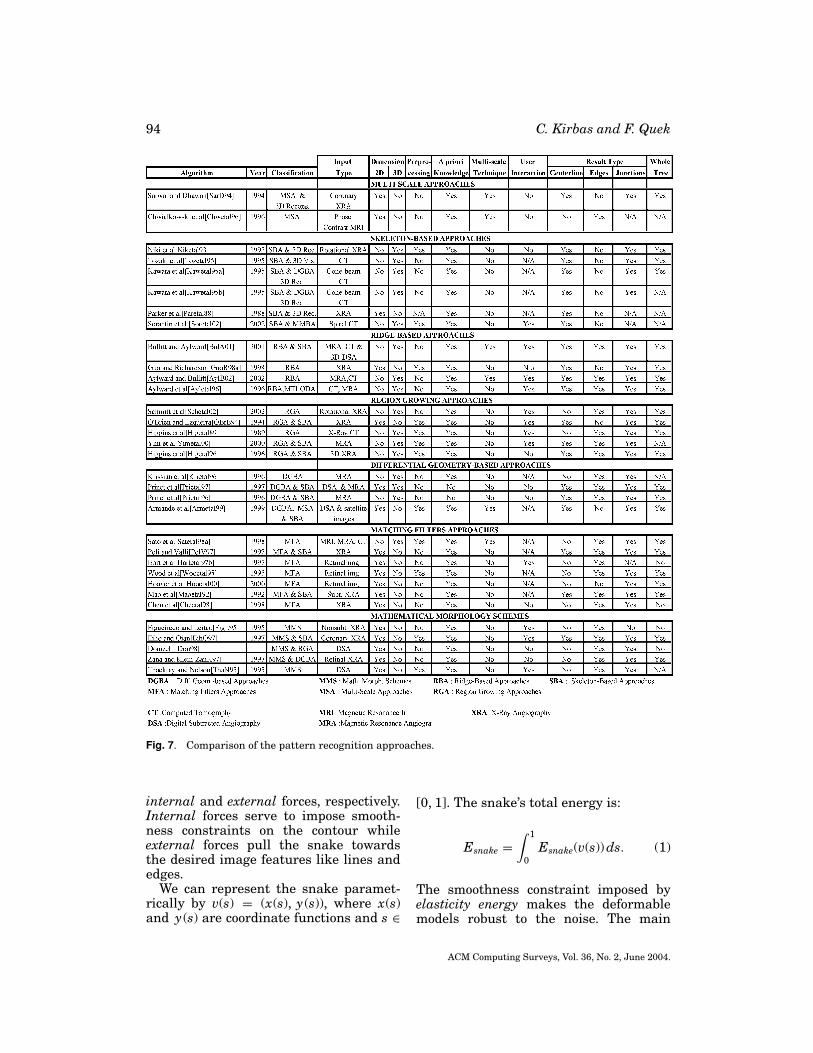
The works of Sarwal and Dhawan [1994]in Section 3.1, Niki et al. [1993] in Section3.2, Kawata et al. [1995a] in Section 3.2,Kawata et al. [1995b] in Section 3.2, andParker et al. [1988] in Section 3.2 are re-lated to 3D reconstruction of the vessels.A comparison table of papers reviewed inthis section is given in Figure 7.
4. MODEL-BASED APPROACHES
Model-based approaches apply explicitvessel models to extract the vasculature.We divide model-based approaches intofour categories: (1) Deformable models, (2)Parametric models, (3) Template match-ing, and (4) Generalized cylinders.
4.1. Deformable Models
We divide deformable models into twocategories: parametric deformable modelsand geometric deformable models. Thesecategories are discusses in detail in thenext sections.
A survey on Deformable Models inmedical image analysis is published byMcInerney and Terzopoulos [1996]. Xuet al. [2000] published a book chapteron medical image segmentation using de-formable models and another book chap-ter on current methods in medical imagesegmentation [Pham et al. 2000] which in-cludes a section on deformable models.
4.1.1. Parametric Deformable Models—ActiveContours (Snakes). Deformable models aremodel-based techniques find object con-tours using parametric curves that deformunder the influence of internal and ex-ternal forces. First introduced by Kass,Witkin, and Terzopoulos in 1987 [Kasset al. 1988], active contour models orsnakes are a special case of a more generaltechnique of matching a deformable modelby means of energy minimization. Phys-ically, a snake is a set of control points,called snaxels, in an image that are con-nected to each other. Each snaxel hasan associated energy that either rises orfalls depending upon the forces that acton it. These forces are known as snake’s
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
94 C. Kirbas and F. Quek
Fig. 7. Comparison of the pattern recognition approaches.
internal and external forces, respectively.Internal forces serve to impose smooth-ness constraints on the contour whileexternal forces pull the snake towardsthe desired image features like lines andedges.
We can represent the snake paramet-rically by v(s) = (x(s), y(s)), where x(s)and y(s) are coordinate functions and s ∈
[0, 1]. The snake’s total energy is:
Esnake =∫ 1
0Esnake(v(s)) ds. (1)
The smoothness constraint imposed byelasticity energy makes the deformablemodels robust to the noise. The main
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 95
disadvantage is that usually it requiresuser interaction to initialize the snake. Italso requires initial parameters given bythe user. Automatic snake initialization isan active ongoing research topic [Caselleset al. 1993; Xu and Prince 1998].
Molina et al. [1998] use 3D snakes toreconstruct 3D catheter paths from bi-plane angiograms. First, geometric distor-tions in both images introduced by theX-ray projections of the vessels are cor-rected. This correction is achieved by find-ing and matching markers affixed to theinput screens of both image intensifiers.Then a ridge detector is applied to segmentthe catheter in both images. The 3D snakeused in this method is represented byB-splines and is initialized interactively.Using a snake facilitates the merging in-formation from both projections simulta-neously during the energy minimizationprocess.
Rueckert et al. [1997] use deformablemodels in tracking of the aorta in cardio-vascular MR images. The system tracksthe shape of the aorta in a cardiac cy-cle to study compliance, which is a mea-sure of elasticity of an artery and definedas the ratio of volume change per pres-sure change between contraction and ex-pansion of the aorta. The location anddiameter of the aorta is roughly esti-mated by using a multiscale medial re-sponse function accompanied with a pri-ori knowledge about the circular shape ofthe aorta as an initial segmentation step.Then, the estimate obtained is refined us-ing an energy minimizing GeometricallyDeformable Model (GDM). Their work in-troduces two new aspects to the classi-cal GDM. First, a Markov–Random Field(MRF) framework is introduced. The sys-tem uses Simulated Annealing (SA) andIterated Conditions Modes (ICM) to mini-mize the energy of the snakes in the MRFframework. Second, GDM is representedby a spline-based representation which isC2 continuous and has the advantage ofcomputing the curvature from analyticalmodels easily.
Kozerke et al. [1999] use a modifieddefinition of the active contour models intheir technique to automatically segment
vessels in cine phase contrast flow mea-surements. The method requires a user-selected vessel of interest in an arbitraryimage frame. Then the system finds thephase image at the phase correspondingto the early systolic acceleration of bloodflow as the starting frame. This is to en-sure robust segmentation of the first im-age frame. In this frame, blood flow is ex-pected to be unidirectional. The steps inthis process ares as follows: (1) Each phaseframe is convolved with a Gaussian maskto reduce noise; (2) All pixels of each framethat exceed half of the maximum phase asfound within a circular mask around thevessel center are detected; (3) Isolated pix-els are removed and the holes are filled us-ing connectivity information; and (4) Thefirst phase image in time with an areaof half of the maximum found overall isselected. The remaining frames are pro-cessed sequentially using the resultingcontours of the previous frame as a modelfor the approximation of the contour inthe current frame in case of missing ordistorted edge features. The method usesphase image, in addition to the magnitudeimage, to handle image distortions.
Rueckert and Burger [1995] combinestochastic and probabilistic relaxationtechniques in their adaptive snake modelto segment vessels in cine MR images.It is assumed that the shape variationbetween successive time frames is rel-atively low. Based on this assumption,the method uses a Simulated Annealing(SA) stochastic relaxation technique tofind the global energy minimum in theadaptive snake used to segment the ves-sel in the first frame. The subsequentframes are segmented using a fast prob-abilistic relaxation technique, called Iter-ated Conditional Modes (ICM). The seg-mentation results from previous frame isused to initialize the snake in the follow-ing frame. The adaptive snake is mod-eled as a 1D Markov Random Field (MRF)and is similar to the concept of Geomet-rical Deformable Models (GDMs) devel-oped by Miller et al. [1991]. The methodis tested with a volume of 16 256×256 MRimages that cover the whole heart cycle.It is reported that the ascending as well
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

96 C. Kirbas and F. Quek
as the descending aorta have been locatedcorrectly.
Geiger et al. [1995] propose a methodfor detecting, tracking, and matching de-formable contours. The method is basedon the dynamic programming (DP) but itis noniterative and is guaranteed to findthe global minimum. Detection algorithmcreates a list of uncertainty points foreach user-selected point. Then, a searchwindow is created from two consecutivelists. Next, DP algorithm is applied to findthe optimal contour passing through theselists. Deformable model is obtained afterconsidering all possible contours and de-formations. Since DP is slow and mem-ory intensive, a multiscale approach isused to speed up the processing at the ex-pense of losing the guaranteed optimality.In contour tracking process in consecutiveframes, the contour obtained in the pre-vious frame is sampled at high curvaturepoints and these points form the initialpoints for the next frame. Matching, alsobased on DP, is achieved through a strat-egy developed which uses a cost functionand some constraints. The method is ap-plicable to a large spectrum of applicationsand the application to medical images isreported in the article.
Klein et al. [1994] use orientation spe-cific filters together with B-Spline snakesto identify vascular features from an-giogram images. The method consists oftwo major components: (1) A bank of ori-entation specific S-Gabor filter pairs areapplied to create an image energy field;and (2) B-Spline snakes, representing thevessels, are employed to obtain centerlineand edge features. Dynamic programmingis used to optimize the B-spline snakes.The method is applied to a number of an-giogram images, including pre and post-angioplasty coronary angiograms, and theresults are reported. Due to the bank oforientation specific S-Gabor filter pairsused, this work can also be classifiedas a matching filters approach listed inSection 3.6.
McInerney and Terzopoulos [1997] de-scribe Affine Cell Decomposition-based(ACD-based) deformable surfaces andshow the potential use of these models
in extraction of complex structures frommedical image volumes. Topologicallydeformable ACD-based models, calledT-snakes and T-surfaces, are parametricmodels that embed deformable models inan ACD framework to extract very com-plex structures. 2D deformable modelsknown as topologically adaptable snakes,T-snakes, are introduced in McInerney andTerzopoulos [1995]. Combining the ACDframework with deformable models allowsthe models to overcome the limitations ofclassical deformable models while keep-ing the traditional properties. A T-surfaceis defined as a closed oriented triangularmesh. The vertices of the triangles act as adynamic particle system where the parti-cles are connected by discrete springs. Asthe T-surface moves under the influenceof internal and external energy forces, themodel is reparameterized with a new set oftriangles and nodes computed from the in-tersection points of the model with the su-perposed grid. Reparameterization of themodel at every step allows the model totopologically transfer and adapt itself tomore complex structures.
Klein et al. [1997] describe an approachto extract vessels from XRAs using de-formable spline models. In their approach,user provides an initial estimate of the lo-cation of the vascular entity, and the sys-tem refines the estimate by deforming asnake, which is implemented by B-splinemodel. The energy function defines suchconstraints as the smoothness or coher-ence of the contour, the closeness of thecontour to image edge pixels, and the com-pactness of the boundary. Gabor filter isused to determine the image energy termto attract the snake. The approach is mostsuitable for the accurate extraction of vas-cular segments. The amount of user inter-action and computation required makesit impractical for extracting entire vascu-lar structures. Due to the bank of orienta-tion specific S-Gabor filter pairs used, thiswork can also be classified as a matchingfilters approach listed in Section 3.6.
Luo et al. [2000] design a model thatovercomes the problems associated withtraditional snakes, such as contour initial-ization, internal parameter setting, and
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 97
the limitations in the capture range of theexternal energy (EE). The model has newinternal energy (IE) and new external en-ergy that are treated equally. The inter-nal energy maintains smoothness withoutany shrinking side effects on the contour.This is accomplished by computing “justenough” smooth force to overcome the im-age force. The external energy combinesboth edge and region information. This re-duces the effects of contour initialization.The model was tested on both syntheticand real gray-level images and reportedencouraging results.
Rueckert and Burger [1996] developa technique based on geometrically de-formable templates (GDT) to track and an-alyze cardiac MR images. The GDT modeluses a bending energy term, in addition toimage energy terms of classic deformabletemplates, to restrict the template to spe-cific shapes. Any deformation of the tem-plate from its equilibrium shape requiresthis bending energy. The algorithm hastwo main steps: (1) Size, position, and ori-entation of the object is determined byaffine transformations using only imageenergy; and (2) Shape is approximated bynonrigid deformations of the deformabletemplate. The total energy of the templateis minimized using a global optimizationtechnique, Simulated Annealing (SA). Theresults of the algorithm applied to bothMR cine sequences of the aorta and my-ocardium are reported.
Sarry and Boire [2001] propose a com-puter vision-based approach to track coro-nary arteries in biplane DSA images. Theyuse a 3D contour model based on 3DFourier shape descriptors and new con-straints inferred from epipolar geometry.The 3D Fourier descriptors are obtainedfrom 2D descriptors of the projected con-tour coordinates. A 3D parametrically de-formable model is, then, employed in 3Dtracking of the artery contours. The 3Dtracking method developed is comparedto classical 3D contour tracking methodwhich consists of independent 2D track-ing in each projection plane and 3D re-construction using the epipolar geome-try constraints. The model is reported todeal with calibration imperfections and
to show higher convergence rate andaccuracy than the general 3D trackingmethod.
Toledo et al. [2000] combine a proba-bilistic principal component analysis tech-nique (PPCAT) with a statistical snake(SS) technique to track non-rigid elon-gated structures. PPCAT is used toconstruct statistical image feature de-scriptions while snakes are used for globalsegmentation and to track objects. TheSS learns and tracks image features us-ing statistical learning techniques. A like-lihood map, used by SS, is created froma training set of object profiles using thePPCAT. Each point in the map is assigneda probability measure to belong to thelearned feature category. The likelihoodmap is extended, by applying an extendedlocal coherence detection to the coherentdirection field, to give priority to parallelcoherent structures. The likelihood mapis used to define a probabilistic potentialfield of the snake. The SS deforms itself tomaximize the overall probability of detect-ing learned image features.
Hu et al. [1998] present a method basedon global and local deformable physicalmodels to extract vessel boundaries fromMR cine phase-contrast (MR-CPC) im-ages. The method uses a circular globalmodel which fits the shape of the vesselcross-section boundary. The global modelallows the method to detect vessel po-sition and size changes in the time se-quence of the phase-contrast images. De-formations on the global circular modelis achieved through a local model. Thelocal model, using variable stiffness pa-rameters, locates the contour on the edgepoints while keeping the contour smoothat locations where edges are missing.Edge segments are extracted using di-rectional gradient information. The algo-rithm was run on a set of over 500 MR-CPC images of the aorta from 20 patientsand the results were reported to be verysuccessful.
The work of Mayer et al. [1997] reviewedin Section 8 can be classified in this sectiondue to ribbon-snakes used.
The work of Thackray and Nelson [1993]described earlier in Section 3.7 may be
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
98 C. Kirbas and F. Quek
thought of as model-based in that the8 morphological operators are essentiallyexplicit oriented vessel models.
The work of Hunter et al. [1995] re-viewed in Section 7 can be classified asparametric deformable model due to theKnowledge-guided Snakes used in the ex-traction process.
The work of Parvin et al. [1994] re-viewed in Section 8 can be classified in thissection due the deformed contour used.
The work of O’Donnell et al. [1994] re-viewed in Section 4.3 can also be classi-fied as a parametric deformable model ap-proach due to the deformable surface used.
The work of Kompatsiaris et al. [2000]reviewed in Section 8 can also be clas-sified as a parametric deformable modelapproach due to the active snakes usedin refinement process of the detectedstent.
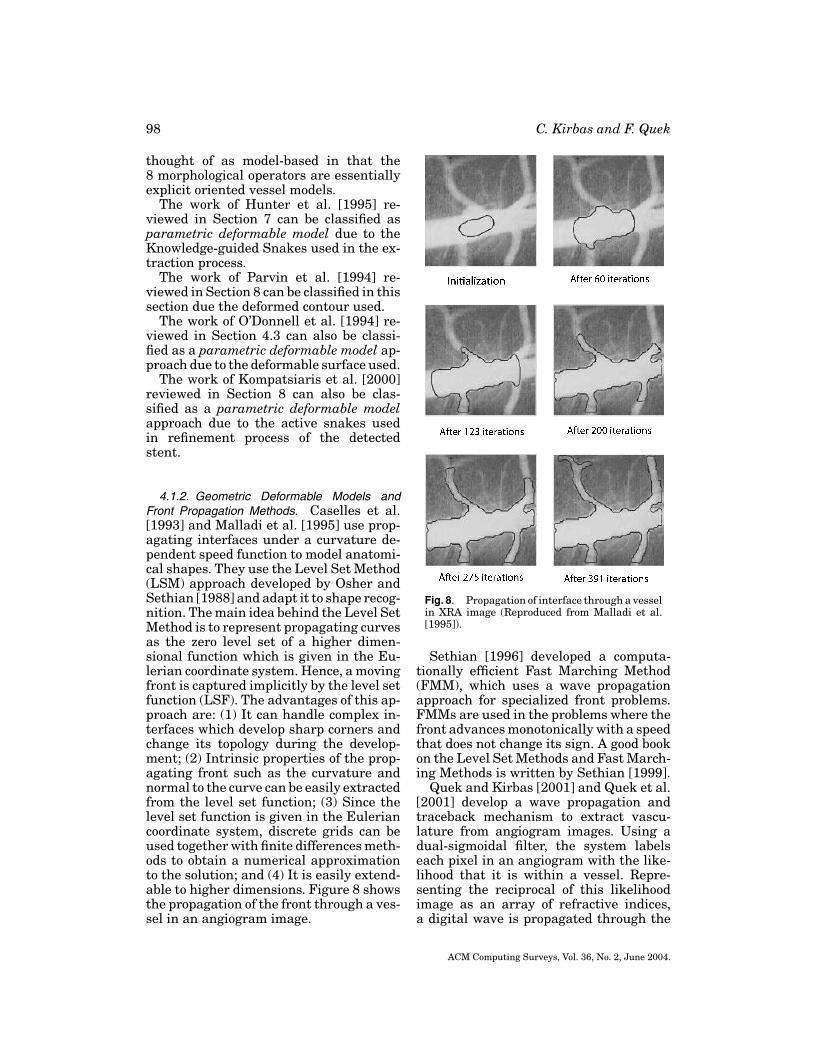
4.1.2. Geometric Deformable Models andFront Propagation Methods. Caselles et al.[1993] and Malladi et al. [1995] use prop-agating interfaces under a curvature de-pendent speed function to model anatomi-cal shapes. They use the Level Set Method(LSM) approach developed by Osher andSethian [1988] and adapt it to shape recog-nition. The main idea behind the Level SetMethod is to represent propagating curvesas the zero level set of a higher dimen-sional function which is given in the Eu-lerian coordinate system. Hence, a movingfront is captured implicitly by the level setfunction (LSF). The advantages of this ap-proach are: (1) It can handle complex in-terfaces which develop sharp corners andchange its topology during the develop-ment; (2) Intrinsic properties of the prop-agating front such as the curvature andnormal to the curve can be easily extractedfrom the level set function; (3) Since thelevel set function is given in the Euleriancoordinate system, discrete grids can beused together with finite differences meth-ods to obtain a numerical approximationto the solution; and (4) It is easily extend-able to higher dimensions. Figure 8 showsthe propagation of the front through a ves-sel in an angiogram image.
Fig. 8. Propagation of interface through a vesselin XRA image (Reproduced from Malladi et al.[1995]).
Sethian [1996] developed a computa-tionally efficient Fast Marching Method(FMM), which uses a wave propagationapproach for specialized front problems.FMMs are used in the problems where thefront advances monotonically with a speedthat does not change its sign. A good bookon the Level Set Methods and Fast March-ing Methods is written by Sethian [1999].
Quek and Kirbas [2001] and Quek et al.[2001] develop a wave propagation andtraceback mechanism to extract vascu-lature from angiogram images. Using adual-sigmoidal filter, the system labelseach pixel in an angiogram with the like-lihood that it is within a vessel. Repre-senting the reciprocal of this likelihoodimage as an array of refractive indices,a digital wave is propagated through the
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
Vessel Extraction Techniques and Algorithms 99
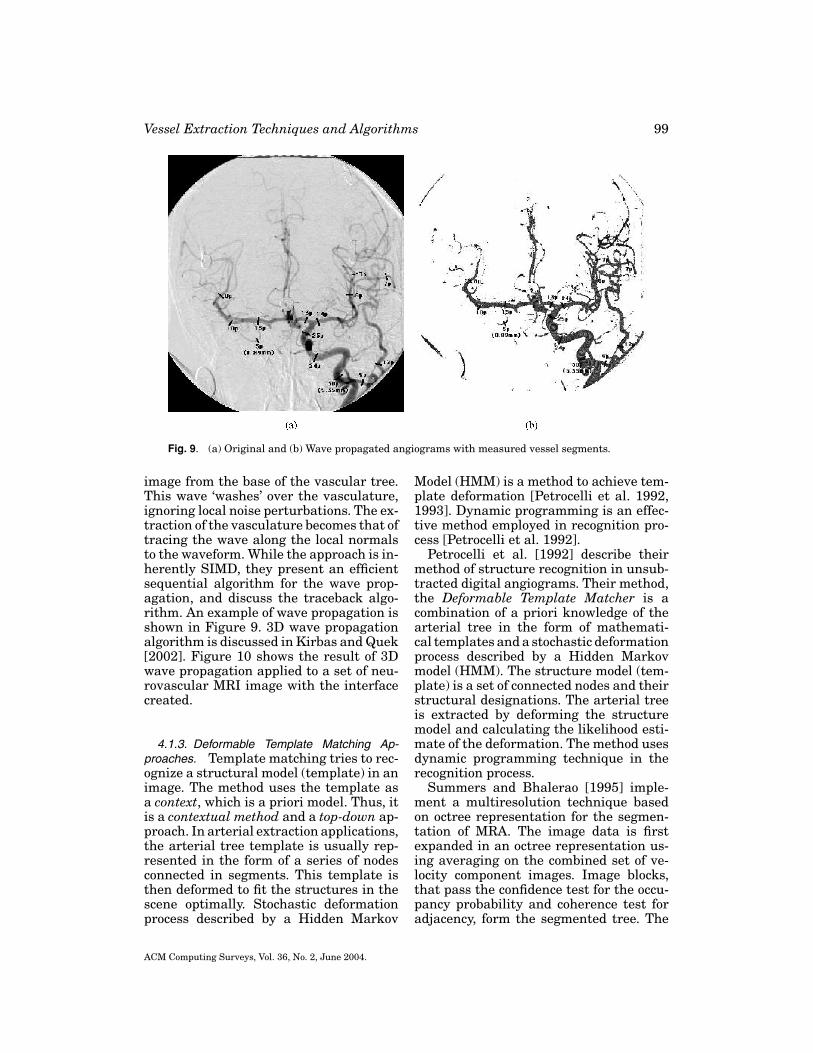
Fig. 9. (a) Original and (b) Wave propagated angiograms with measured vessel segments.
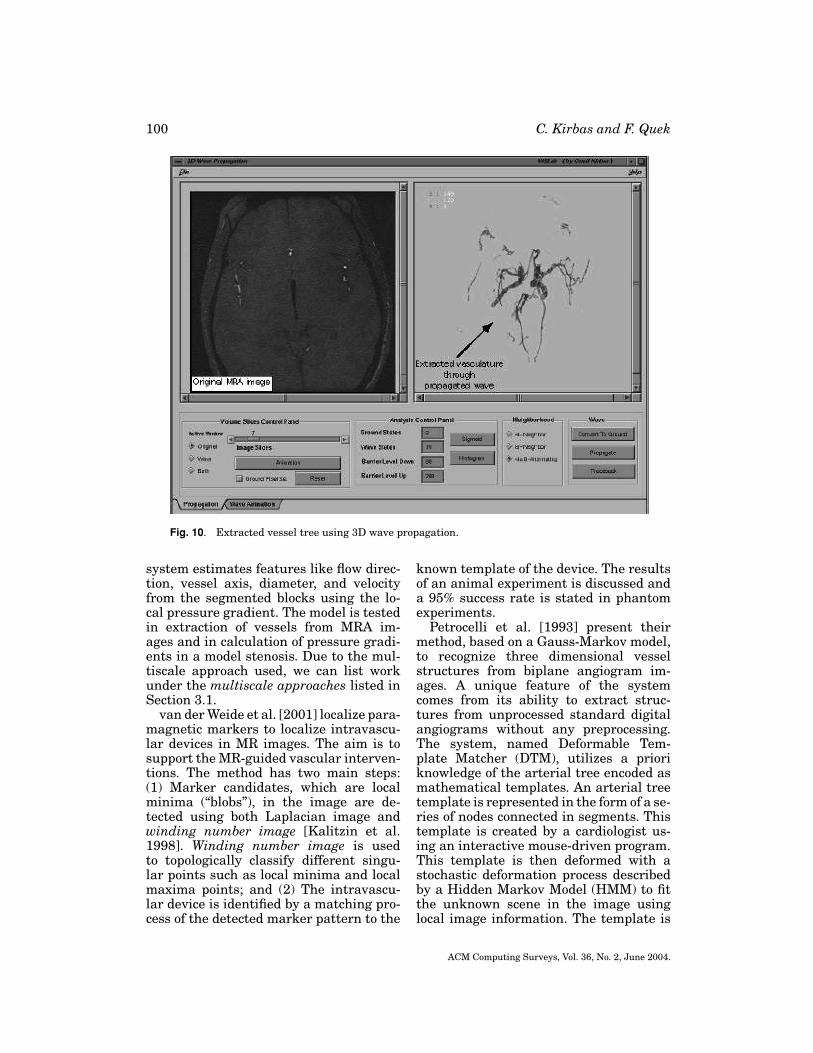
image from the base of the vascular tree.This wave ‘washes’ over the vasculature,ignoring local noise perturbations. The ex-traction of the vasculature becomes that oftracing the wave along the local normalsto the waveform. While the approach is in-herently SIMD, they present an efficientsequential algorithm for the wave prop-agation, and discuss the traceback algo-rithm. An example of wave propagation isshown in Figure 9. 3D wave propagationalgorithm is discussed in Kirbas and Quek[2002]. Figure 10 shows the result of 3Dwave propagation applied to a set of neu-rovascular MRI image with the interfacecreated.
4.1.3. Deformable Template Matching Ap-proaches. Template matching tries to rec-ognize a structural model (template) in animage. The method uses the template asa context, which is a priori model. Thus, itis a contextual method and a top-down ap-proach. In arterial extraction applications,the arterial tree template is usually rep-resented in the form of a series of nodesconnected in segments. This template isthen deformed to fit the structures in thescene optimally. Stochastic deformationprocess described by a Hidden Markov
Model (HMM) is a method to achieve tem-plate deformation [Petrocelli et al. 1992,1993]. Dynamic programming is an effec-tive method employed in recognition pro-cess [Petrocelli et al. 1992].
Petrocelli et al. [1992] describe theirmethod of structure recognition in unsub-tracted digital angiograms. Their method,the Deformable Template Matcher is acombination of a priori knowledge of thearterial tree in the form of mathemati-cal templates and a stochastic deformationprocess described by a Hidden Markovmodel (HMM). The structure model (tem-plate) is a set of connected nodes and theirstructural designations. The arterial treeis extracted by deforming the structuremodel and calculating the likelihood esti-mate of the deformation. The method usesdynamic programming technique in therecognition process.
Summers and Bhalerao [1995] imple-ment a multiresolution technique basedon octree representation for the segmen-tation of MRA. The image data is firstexpanded in an octree representation us-ing averaging on the combined set of ve-locity component images. Image blocks,that pass the confidence test for the occu-pancy probability and coherence test foradjacency, form the segmented tree. The
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
100 C. Kirbas and F. Quek
Fig. 10. Extracted vessel tree using 3D wave propagation.
system estimates features like flow direc-tion, vessel axis, diameter, and velocityfrom the segmented blocks using the lo-cal pressure gradient. The model is testedin extraction of vessels from MRA im-ages and in calculation of pressure gradi-ents in a model stenosis. Due to the mul-tiscale approach used, we can list workunder the multiscale approaches listed inSection 3.1.
van der Weide et al. [2001] localize para-magnetic markers to localize intravascu-lar devices in MR images. The aim is tosupport the MR-guided vascular interven-tions. The method has two main steps:(1) Marker candidates, which are localminima (“blobs”), in the image are de-tected using both Laplacian image andwinding number image [Kalitzin et al.1998]. Winding number image is usedto topologically classify different singu-lar points such as local minima and localmaxima points; and (2) The intravascu-lar device is identified by a matching pro-cess of the detected marker pattern to the
known template of the device. The resultsof an animal experiment is discussed anda 95% success rate is stated in phantomexperiments.
Petrocelli et al. [1993] present theirmethod, based on a Gauss-Markov model,to recognize three dimensional vesselstructures from biplane angiogram im-ages. A unique feature of the systemcomes from its ability to extract struc-tures from unprocessed standard digitalangiograms without any preprocessing.The system, named Deformable Tem-plate Matcher (DTM), utilizes a prioriknowledge of the arterial tree encoded asmathematical templates. An arterial treetemplate is represented in the form of a se-ries of nodes connected in segments. Thistemplate is created by a cardiologist us-ing an interactive mouse-driven program.This template is then deformed with astochastic deformation process describedby a Hidden Markov Model (HMM) to fitthe unknown scene in the image usinglocal image information. The template is
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 101
considered to fit the scene when the bestof the state transition is found. Since thesystem is working in 3D, the deformationprocess is performed in space and back-projected onto two planes used. It requiresa good model of the global structure andcomputational complexity to extract en-tire vascular structure.
4.2. Parametric Models (PM)
Parametric models approach defines ob-jects of interest parametrically. In tubu-lar object segmentation, objects are de-scribed as a set of overlapping ellipsoids.Some applications use a circular vesselmodel [Chan et al. 2000]. The parame-ters of the model used are estimated fromthe image. While an elliptic PM can ap-proximate healthy vessels and stenoses,it fails to approximate pathological ir-regular shapes and vessel bifurcations.Pellot et al. [1994] employs deformable el-liptic model to approximate irregular ves-sels and bifurcations.
Pellot et al. [1994] reconstruct vascu-lar structures from two XRAs with anadapted simulated annealing algorithm.Healthy vessels and concentric stenosesare initially modeled using ellipses. Thisinitial model is then deformed to fit to anybranching cross-section or pathology. Anadaptive simulated annealing optimiza-tion algorithm is used to control the de-formation. Properties on the optimal solu-tion are described by a Markov RandomField. The method is reported to per-form well both on single vessels and onbifurcations.
Chan et al. [2000] utilize diameter in-formation contained within the intensityprofile amplitude (IPA) to estimate di-ameters of narrow vessels in X-ray cine-angiograms. A unique feature of the IPAis that it is sensitive to changes in smallvessel diameters in case of noise and blur.The method has two steps: (1) Estimationof the imaging model parameters directlyfrom the images and estimation of the di-ameters from these parameters. This stephas three components to achieve imag-ing model parameters: a circular vesselmodel, a nonlinear imaging model, and a
parameter estimation. (2) Application of amaximum likelihood estimation techniquewith amplitude information incorporated.It is reported that the model successfullyestimates the diameters in the range of0.4 mm to 4.0 mm.
Krissian et al. [1998] develop a mul-tiscale model to extract and reconstruct3D vessels. The model is an extensionof their previous work [Krissian et al.1998a, 1998b]. It is based on previouswork [Koller et al. 1995; Lorenz et al. 1997;Pizer et al. 1998; Fritsch et al. 1994, 1995;Lindeberg 1994, 1996], on multiscale de-tection with some modifications. It con-sists of three main steps: (1) Multiscale re-sponses from discrete set of scales is com-puted; (2) Local extrema in multiscale re-sponse is extracted; and (3) Skeleton ofthe local extrema is created and the resultis visualized. A cylindrical vessel modelis utilized in the first step to interpretthe eigenvalues of the Hessian matrix andto choose a good normalization parame-ter. The initial tests give promising re-sults, with some local problems at vesseljunctions and tangent vessels. Figure 11shows some of the results of their work.An extension of this work, with a new re-sponse function, is reported in Krissianet al. [1999].
Bors and Pitas [1998] use a patternclassification-based approach for 3D objectsegmentation and modeling in volumetricimages. The objects are considered as astack of overlapping ellipsoids whose pa-rameters are found using the normalizedfirst and second order moments. The seg-mentation process is based on the geomet-rical model and gray-level statistics of theimages. The center of the ellipsoids are es-timated using an extended Hough Trans-form algorithm in 3D space. The methodemploys a radial Basis Function (RBF)network classifier in modeling the 3Dstructure and gray-level statistics. In theRBF classifier, each unit corresponds to anellipsoid. The learning of the RBF networkis based on the α-Trimmed Mean algo-rithm [Pitas and Venetsanopoulos 1990].The algorithm was run on a set of toothpulpal blood vessel microscopy images andthe results were presented.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

102 C. Kirbas and F. Quek
Fig. 11. Left, top to bottom, MIP of the original image, the detected centerlines superimposedon MIP, and the detected centerlines combined with an isosurface using transparency. Right, topto bottom, two isosurfaces of the initial image with different thresholds and an isosurface of thereconstructed image (Reproduced from Krissian et al. [1998a]).
4.3. Generalized Cylinders Model
Generalized cylinders (GC) are usedto represent cylindrical objects. Techni-cally generalized cylinders are parametricmethods but we discuss them separatelybecause there is a significant amountof work on this model and because ofits prominence in the literature. Binford[1971] and Agin and Binford [1976] intro-
duced the use of GC in vision applications.Generalized cylinders consist of a spacecurve, or axis, and a cross-section func-tion defined on that axis. The cross-sectionfunction is usually an ellipse. Tubular ob-jects are defined by a cross-sectional el-ement that is swept along the axis ofthe tube (spine) using some sweep rules.The spine is represented by a spline andthe cross-section function is represented
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 103
Fig. 12. (a) The final fit of the model to segmented CT angiogram of human aortic arch, and(b) Aorta with aneurysm (Reproduced from O’Donnel et al. [1997]).
by an ellipse. Another method to rep-resent cylinders is to use Frenet-Serretformulation as the basis of general-ized cylinders [Zerroug and Nevatia1993]. However, Frenet-Serret formula-tion model and tube model described ear-lier suffer some serious drawbacks, suchas discontinuities and non-intuitive twist-ing behavior. To alleviate these problems,researchers developed some otherg gen-eralized cylinders models. One of thesemodels is the Extruded Generalized Cylin-ders (EGC) developed by O’Donnell et al.[1994]. Their work is described in detail inthis section.
Kayikcioglu and Mitra [1993] use aparametric model with elliptical cross-sections to reconstruct coronary arterialtrees from biplane angiograms. Estima-tion of the vessel parameters are obtainedfrom Marquardt-Levenberg techniquewhich is a nonlinear least-square-errorestimation technique. Kitamura et al.[1988a, 1988b] used a different versionof the Marquardt-Levenberg techniquein their work. Using these vessel pa-rameters, elliptic model parameters arecomputed and used to reconstruct 3Dartery segments. The authors report thattheir parametric modelling approach hasbetter performance than those of the
derivative-based models particularly onconsistency and variability.
O’Donnell et al. [1997] use a form ofGC to recover cylindrical structures frommedical images. A GC is a volume createdby cross-section swept along a path, thespine. The spine is represented by a 3D cu-bic B-spline and the cross-section swept isalways in the plane orthogonal to the spineto form the cylinder. The strength of theirmodel comes from additional finite ele-ment (FEM) mesh-like component lying ontop of their model to address the fine detailin complex structures. Figure 12 shows aresult of their approach.
Sato et al. [1998a] propose a semi-automated method based on multiscaleHessian-based technique to determinethe position, orientation, and diameterof stenoses in coronary angiograms. TheHessian matrix, H, describes the second-order structure of local intensity varia-tions around each point in the image. Themethod consists of five stages: (1) Twoimages in which stenosis can be seenare selected; (2) corresponding points intwo images are manually selected to findtranslational parameters; (3) 2D positionsand orientations of the stenosis in two im-ages are estimated; (4) 3D position andorientation of the stenosis are calculated
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

104 C. Kirbas and F. Quek
based on the principle of binocular stereo;(5) The vessel of interest with stenosis andany peripheral vessels which may be over-lap the stenosis are specified manually.The method utilizes scale-dependency toformulate the diameter estimation to re-duce user interaction.
Puig [1998a] describes her cerebralblood vessel modeling technique with agood imaging, modeling, and visualiza-tion review in her report. She proposes ahybrid model for the blood vessel repre-sentation scheme. The model stores sym-bolic information of the topology, such asbranching and irregularities, like stenosesand aneurysms, as well as volume and sur-face information. The model uses graphrepresentation associated with surfaceand volume information. Reconstructionof the symbolic model is achieved by ex-tracting the Discrete Medial Axis (DMAT),described in Puig [1998b], based on a seedstrategy that begins with a voxel of themedial axis and a main direction associ-ated with the voxel. Each voxel is clas-sified according to the projections of itswave and the graph is constructed incre-mentally. Associated surface model is cre-ated using Generalized Cylinders and vol-ume model is created using run-lengthencoding.
Fessler and Macovski [1991] develop anobject-based method for reconstructing ar-terial trees from a few projection images.The method uses an elliptical model ofgeneralized cylinders to approximate arte-rial cross-sections. By incorporating a pri-ori knowledge of the structure of arteries,the problem of reconstruction turns intoan object estimation problem. The methodemploys a nonparametric optimality cri-terion that attempts to capture arterialsmoothness incorporated in the system asa priori knowledge. The method was ap-plied to three data sets and the resultswere reported.
O’Donnell et al. [1994] introduce a newdeformable model, extruded generalizedcylinder (EGC), for object segmentation.The article discusses the drawbacks of theexisting generalized cylinder (GC) mod-els and gives the rationale for their newmodel. The EGC model allows a nonplanar
spine and overcomes the problems causedby inflection points and spine torsion. Themodel has some properties that make ituseful when there is no a priori curvatureinformation about the object to be recov-ered: (1) Ability to describe cylinders withlocally straight as well as curved spines;and (2) Having intuitive twisting behaviorgiven by twisting parameters. The EGCmodel is further extended to include localsurface deformations. The algorithm wasapplied to presegmented carotid arterydata and the result was presented. Thiswork can also be classified as a paramet-ric deformable model approach listed inSection 4.1.1 due to the deformable sur-face used.
Kayikcioglu and Mitra [1992] analyzethe shapes and calculate the areas of coro-nary arterial cross-sections from biplaneangiograms using an elliptical model. Themodel uses ideal intensity distributionsof an elliptical cross section of coronaryartery to find the shape and area informa-tion. The method was tested on computergenerated and real arterial data and theresults were presented.
The work of Huang and Stockman[1993] reviewed in Section 8 can be listedin this section since they are using gener-alized cylinders to extract tubular struc-tures in 2D intensity images.
4.4. 3D Reconstruction of Vessels
The works of Pellot et al. [1994] inSection 4.2, Krissian et al. [1998] inSection 4.2, Kayikcioglu and Mitra[1993] in Section 4.3, Puig [1998a] inSection 4.3, Fessler and Macovski [1991]in Section 4.3, and Molina et al. [1998] inSection 4.1.1 are related to 3D reconstruc-tion of the vessels. A comparison table ofpapers reviewed in this section is given inFigure 13.
5. TRACKING-BASED APPROACHES
Tracking-based approaches apply local op-erators on a focus known to be a vesseland track it. On the other hand, patterrecognition approaches apply local opera-tors to the whole image. Vessel tracking
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 105
Fig. 13. Comparison of the model-based approaches.
(VT) approaches, starting from an initialpoint, detect vessel centerlines or bound-aries by analyzing the pixels orthogonal tothe tracking direction. Different methodsare employed in determining vessel con-tours or centerlines. Edge detection oper-ation followed by sequential tracing by in-corporating connectivity information is astraightforward approach. Aylward et al.[1996] utilize intensity ridges to approx-imate the medial axes of tubular objectssuch as vessels. Some applications achievesequential contour tracing by incorporat-ing the features, such as vessel centralpoint and search direction detected fromprevious step into the next step [Lu andEiho 1993]. Fuzzy clustering is anotherapproach to identify vessel segments. Ituses linguistic descriptions like “vessel”and “nonvessel” to track vessels in reti-
nal angiogram images. After the initialsegmentation, a fuzzy tracking algorithmis applied to each candidate vessel re-gion. Some methods utilize a model in thetracking process and incrementally seg-ment the vessels. A more sophisticatedapproach on vessel tracking is the useof graph representation [Lecornu et al.1994]. The segmentation process is, then,reduced to finding the optimum path ina graph representation of the image. Onedisadvantage of the vessel tracking ap-proaches is that they are not fully auto-matic and require user intervention for se-lecting starting and end points.
Tolias and Panas [1998] develop a fuzzyC-means (FCM) clustering algorithm thatuses linguistic descriptions like “vessel”and “nonvessel” to track fundus ves-sels in retinal angiogram images. Their
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

106 C. Kirbas and F. Quek
algorithm uses only (fuzzy) image inten-sity information and makes no assump-tions for the shape of the vessels. First,optic nerve in fundus images is detectedand used as the starting point. Next, thebounding circle of the optic nerve is found.Then, the points in the bounding circleare segmented as “vessel” and “nonves-sel” using a FCM. Finally, a fuzzy vesseltracking algorithm is applied to each can-didate vessel. The algorithm does not uti-lize any edge information to locate the ves-sels and this reduces the effects of noise inthe tracking procedure.
Hart and Holley [1993] develop an au-tomated coronary artery tracking system,which incorporates information withinsubsections of the image for stable track-ing, in unsubtracted angiograms. The sys-tem iteratively operates on image blocksusing a first order predictive scheme. Fea-tures obtained, such as vessel width anddirection, from one image block (n), areinput to next image block (n + 1) as ini-tial information. Then, the system selectsan appropriate image block size for an op-timum width and direction for the nextprocessing step. The seed direction, seedwidth and starting point of the first im-age block are given by user. This algorithmis relatively slow due to calculation be-ing done on whole image blocks but fasterthan some tracking algorithms that useglobal image structures since it uses onlylocal information in each image block. Thesystem has problems in tracking arteriesat bifurcations and sharp changes in ves-sel width.
Park et al. [1997] describe their work ofextracting features and profiling narrowblood vessels in DSA images. Their sys-tem applies maximum-likelihood estima-tion on adjacent pixels for boundary detec-tion and an adaptive tracking algorithmbased on the direction field. The algorithmdetects the position of centerlines as direc-tion vectors and adaptively tracks entirevessel’s direction field. A median filter isused as a preprocessing step to improvethe image quality.
Quek et al. [1999, 2001] propose a modelto interpret Neurovascular XRA imagesinteractively. This attentionally-based in-
teractive model, AIM, exploits human in-teraction as part of the solution. AIMposits two channels of interaction: context(“what to look for”), and focus-of-attention(“where to look”) as the locus of spatial in-formation exchange between the user andthe machine. In an AIM system, the userspecifies a context (e.g., a carotid vessel)and directs the attentional spotlight to fo-cus machine processing. AIM involves theuser with the computer as integral partnerand facilitates varying degrees of humanintervention in the process. A hierarchyof context abstractions permits the sys-tem to function more autonomously (doinghigh-level tasks like extracting an arterialvessel) in routine interpretation, and torequire more user intervention (e.g., locat-ing arterial wall boundaries) as the imagecomplexity increases. This feature lets themedical professional have ultimate con-trol and confidence in the system. The sys-tem employs several edge detection algo-rithms, for example, Canny and Sobel, forthe extraction of vessel boundaries.
Lu and Eiho [1993] describe theirmethod of tracing the coronary arterialboundaries with sub-branches from XRAs.Their method has three steps: (1) De-tecting edges; (2) Finding branches; and(3) Tracing contours sequentially. Edgepoints are evaluated and fixed by employ-ing a smoothing differential operator onthe scan line perpendicular to the direc-tion of the vessel. Branch positions andbranches are detected automatically fromthe same algorithm. Branching points aredetected by checking the gray profile onthe scan line. Sequential contour tracingachieved by incorporating the features,such as the central point, the searchingdirection, and the search range, detectedfrom previous step into the next step. Ini-tial central point, search direction, andsearch range is given by the user.
Ritchings and Colchester [1986] applieda syntactic pattern recognition schemeto diagnose vascular abnormalities. Theyprocess XRAs by applying an edge detectorand pairing the resulting edge segmentsthat may be parallel opposing edges ofa vessel segment. These may be thoughtof as “ribbon segments” which may be
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 107
grouped to obtain extended vessel tracts.Each of these segments are labeled asnormal, widening, unsure, and abnormaldepending on the shape of the oppos-ing edge segments using a syntactic pat-tern recognition system. The system doesnot attempt to determine the structure ofthe arterial system. The goal is to obtainthese labels for the diagnosis of vascularabnormality.
Stockett and Soroka [1992] applied com-puter vision techniques to extract spinalcord contours from transaxial MR images.The method starts with the user supply-ing an approximate center point on thespinal cord. Then, the algorithm starts tosearch for edges by moving outwards along16 equally spaced radials centered on thespinal cord. In case of lacking significantedges, an interpolation operation is per-formed on the radii. Finally, the extractedcurve is smoothed by adjusting the edgepoints with respect to its neighboring edgepoints. The algorithm is fairly simple andruns on a personal computer but requiresimprovements on the edge detection andsmoothing operations.
Lecornu et al. [1994] extract vessel con-tours in angiogram images by trackingtwo edges simultaneously by means ofgraph theory. A blood vessel model is in-corporated and some blood vessel proper-ties such as the position and size of sec-tion and the curvature of the segmentare used in the formal structure model.The detection process employs a heuris-tic search method [Martelli 1976] whichsearches for the best edge in an image. Thebest edge is found as the optimum pathin a graph representation of the image.They improve the algorithm by improv-ing node concept by considering two oppo-site edges together to represent the vesselsegments.
Chandrinos et al. [1998] extract ves-sels in fundus images for the examina-tion of atherosclerotic changes due tohypertension. The method utilizes theidea that each vessel presents a ridgein cross-sectional intensity profiles. Ridgedetection process starts with a Gaussiansmoothing to handle the variations in im-age intensity. Then, a directional map is
built by registering the direction of thegradients at scanned image points. In thefinal image scan, ridge points are detectedby suppressing pixels that do not satisfya set of criteria, such as directional con-sistency with neighboring pixels, inten-sity supremacy over neighboring pixels,and contrast maximization in the direc-tion orthogonal to the vessel direction. Aset of filters is applied to the final imageto clean the noise and repair fragmentedvessels. After the extraction process, themethod employs some image-based mea-suring techniques to obtain vessel caliber,wall thickness, and tortuosity.
Liu and Sun [1993] extract extendedtracts of vasculature in XRAs by an adap-tive tracking algorithm. Given an initialpoint within a vessel, they apply an “ex-trapolation update” scheme [Sun 1989]that involves the estimation of local ves-sel trajectories. Once a segment has beentracked, it is deleted in the angiogramimage by growing the “deletion intensityvalue” over the grey levels representingthe vessel. This procedure is performedrecursively to extract the vascular tree.This algorithm requires user-supplied ves-sel starting points, and does not appearextensible to 3D extraction.
Haris et al. [1997b] develop an interac-tive method to extract vascular networksin angiograms. The method has five steps:(1) An adaptive smoothing process is ap-plied using anisotropic diffusion whichpreserves the image structure; (2) Imagegradient is calculated using the partialderivatives of the Gaussian filter; (3) Wa-tershed transform is applied to the im-age gradient magnitude resulting in aninitial partition image with many smallhomogeneous regions; (4) The resultingpartition image is input to a fast regionmerging process; and (5) Vessel regionsare extracted by a simple point-and-clickinteractive process. The segmented vas-cular network is represented by RegionAdjacency Graph which provides spatialrelationship information about the vesselsin the network. The current version of themethod works in 2D and it is reportedthat the smoothing algorithm used over-smooths the thin vessels.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

108 C. Kirbas and F. Quek
Fig. 14. Comparison of the tracking-based approaches.
Shen and Johnson [1994] combine a con-ventional manual segmentation approachwith a bimodal thresholding algorithm todevelop a semi-automatic image segmen-tation tool. In the manual segmentation,user supplies control points of a cubicspline for each section and the system fitsappropriate spline to these points. The au-tomatic segmentation part applies a bi-modal thresholding to the local window inthe image given by the user. The steps ofthe algorithm are: (1) A starting point isentered by the user (2) An edge detectionand contour following methods are appliedto find region boundaries. Only a smallpiece is segmented at a time. Bimodalthresholding algorithm is used to deter-mine the boundary segments in the localregion; (3) User corrects any faulty con-tour; and (4) Algorithm continues to findthe next segment. This approach worksonly in 2D images.
Zhou et al. [1994] develop a method todetect and quantify retinopathy in digi-tal retinal angiograms. Their method re-lies on a matched filtering approach whichuses a priori knowledge about retinal ves-sel properties. The tracking algorithm isan adaptive iterating procedure and mod-els the vessel profile using Gaussian func-tion. The algorithm also utilizes spatialcontinuity properties of the vessel seg-ments to improve computational perfor-mance in regions where the vessel seg-
ments are relatively straight. This methodrequires the user to identify beginning andending search points and first vessel direc-tion manually.
Stevenson [1987] propose a system totrack vessels between user-supplied ves-sel bifurcations. The uniqueness of theirwork is that they use vessel segmentsextracted from two different X-ray view-points to estimate 3D structure of the vas-culature. The steps of the method are:(1) Bifurcation points in the first view andtheir corresponding points in the secondview are entered by the user; (2) Vesselcenterlines are tracked using local max-ima; (3) Centerlines are smoothed and cor-rected; (4) 3D coordinates of centerlinepoints in real space are calculated usingtransformation matrices; and (5) The nextpair of images are loaded and the pointsmarked in the previous frame are detectedusing statistical correlation technique. Al-gorithm repeats Steps (2) through (5) untilthe last frame. A comparison table of pa-pers reviewed in this section is given inFigure 14.
6. ARTIFICIAL INTELLIGENCE-BASEDAPPROACHES
Artificial Intelligence-based approaches(AIBA) utilize knowledge to guide the seg-mentation process and to delineate vesselstructures. Different types of knowledge
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 109
are employed in different systems fromvarious sources. One knowledge sourceis the properties of the image acquisi-tion technique, such as cine-angiography,DSA, computed tomography (CT), MRI,and MRA. Some applications utilize ageneral blood vessel model as a knowl-edge source. Smets et al. [1988] encodegeneral knowledge about appearance ofblood vessels in the form of 11 rules (e.g.,that vessels have high intensity centerlines, comprise high intensity regions bor-dered by parallel edges etc.). Stansfield[1986] applies a domain-dependent knowl-edge of anatomy to interpret cardiac an-giograms in the high-level stages. Accord-ing to Stansfield, “Anatomical knowledgeis embodied within the system in theform of spatial relations between objectsand the expected characteristics of the ob-jects themselves”. Knowledge-based sys-tems exploit a priori knowledge of theanatomical structure. These systems em-ploy some low-level image processing al-gorithms, such as thresholding, thinning,and linking, while guiding the segmenta-tion process using high-level knowledge.AIBA perform well in terms of accuracy,but the computational complexity is muchlarger than some other methods.
Rost et al. [1998] describe theirknowledge-based system, called Solutionfor a Learning Configuration System forImage Processing (SOLUTION), designedto automatically adopt low-level imageprocessing algorithms to the needs ofthe application. It aims to overcome theproblem of extensive change requirementin the existing system to perform ina different environment. The systemaccepts task descriptions in high-levelnatural spoken terms and configures theappropriate sequence of image processingoperators by using expert knowledge for-mulated explicitly by rules. In the presentimplementation, extraction process islimited to contours.
Smets et al. [1988] present a knowledge-based system for the delineation of bloodvessels on subtracted angiograms. Thesystem encodes general knowledge aboutappearance of blood vessels in the formof 11 rules (e.g., that vessels have high
intensity center lines, high intensity re-gions bordered by parallel edges, etc.).These rules facilitate the formulation of a4-level hierarchy (pixels, center lines,bars, and segments) each of which is de-rived from the preceding level by a subsetof the 11 rules. The main stages in the al-gorithm are: (1) Obtain the center lines ofthe vessels by an adaptive maximum in-tensity detector; (2) Apply thresholding,thinning, and linking operations to get thefinal center lines segments; (3) Constructbar-like primitives using region growingalgorithm on the center lines detected; and(4) Combine bar-like structures into vesselsegments using geometrical and topologi-cal knowledge of the vessels. The systemhas considerable problems at vessel bifur-cations and self-occlusions.
Stansfield [1986] describes a rule-basedexpert system, called ANGY, to segmentcoronary vessels from DSA images. Thereare three main stages in the ANGY sys-tem: a preprocessing stage which containslow-level image processing routines writ-ten in C and a rule-based expert systemwith two stages: a low-level image pro-cessing stage and and a high-level medicalstage. The former stage embodies domain-independent knowledge of segmentation,grouping, and shape analysis while thelatter stage embodies a domain-dependentknowledge of cardiac anatomy and phys-iology. The system extracts vessel seg-ments as trapezoidal units using an OPS5production system. The rule set is used todetermine which edge segments may par-ticipate to the formation of these trape-zoidal strips and which segments arisefrom image noise. The system does notcombine these units to form a vascularstructure.
Goldbaum et al. [1996] describe theirSTARE (Structural Analysis of the Retina)image management system for the diag-nosis and analysis of the retinal images.Segmentation of the images is achievedby employing rotating matched filters. Af-ter the extraction of the objects of inter-ests,the classification is performed usingone of the linear discrimination function,quadratic discrimination function, logicclassifier, and back propagation artificial
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

110 C. Kirbas and F. Quek
Fig. 15. Comparison of the artificial intelligence-based approaches.
neural networks with balanced accuracyand computation cost. Finally, the infer-encing about the image content is ac-complished with Bayesian network, whichlearns from sample images of the diseases.Due to the rotated matched filters used inthe segmentation process, this work canalso be classified as a matching filters ap-proach listed in Section 3.6.
Bombardier et al. [1997] use two fuzzysegmentation operators for the automaticidentification of artery boundaries fromangiogram images in their knowledge-based approach. Different segmentationoperators cooperate to extract differentanatomical structures (the aorta and renalarteries). The segmentation process hastwo main steps: (1) Identification of theregion of interest (ROI), which is the re-nal artery in this case; and (2) Detection ofthe boundaries of the identified structuresautomatically. They use fuzzy set theoryto represent the knowledge. A comparisontable of papers reviewed in this section isgiven in Figure 15.
7. NEURAL NETWORK-BASEDAPPROACHES
Neural networks are used to simulate bi-ological learning and widely used in pat-tern recognition. Neural nets are basicallya classification approach. The networkis a collection of elementary processor(nodes). Each node takes a number of in-puts, performs elementary computations,and generates a single output. Each nodeis assigned a weight and the output isa function of weighted sum of the in-puts. These weights are learned throughtraining and then used in the recognition.
Back-propagation algorithm is a widelyused learning algorithm. One problem as-sociated to learning is that, learning de-pends on the training data set. The sizeof the training data set effects the learn-ing process. The training procedure shouldbe rerun each time new training datais added to the set. Since the aforemen-tioned neural networks require a train-ing data set, the learning process is asupervised learning. A different class ofneural networks are self-teaching and donot depend on training data set for thelearning. The best known of these classof neural networks is Kohonen featuremaps or Kohonen [1995] self-organizingnetworks. Interested readers are referredto Ripley [1996], Clak [1991], and Haykin[1994] for more information on neural net-works. Neural networks are used in a widerange of applications. In medical imag-ing, neural networks are mainly used asa classification method where the systemis trained with a set of medical imagesand the target image is segmented usingthe trained system. One of the advantagesthat make neural networks attractive inmedical image segmentation is their abil-ity to use nonlinear classification bound-aries obtained during the training of thenetwork. Another attractive feature is theability to learn. With the selection of agood training set which includes all pos-sible features or objects, the network canlearn the classification boundaries in itsfeature space. One of the disadvantages ofneural networks is that they need to trainevery time a new feature is introduced thenetwork. Another limitation is the diffi-culty of debugging the performance of thenetwork.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 111
Cronemeyer et al. [1992] describe theirskeleton finder which is a parallel versionof the work done by Nguyen and Sklansky[1986a, 1986b]. Their work aims to re-construct vessels in 3D from biplane an-giograms. The algorithm starts with a seg-mentation process to reduce the region tosearch artery-like structures. Then, ridgesand boundaries are detected in the seg-mented regions. Next, vessel segments aretracked in parallel. They implemented anadaptive tracking as well as a standardtracking algorithm and compared the re-sults. It is stated that the adaptive track-ing algorithm is less sensitive to artifactsand erroneous ridge points while stan-dard algorithm performs better trackingof small and noisy segments. Finally, alldetected vessels are combined to form theartery tree. Due to the ridge detectionperformed, this work can also be classi-fied as a ridge-based approach listed inSection 3.3.
Nekovei and Sun [1995] detect bloodvessels in XRA images using neural net-works with back-propagation algorithm.This system does not extract the vascu-lar structure. Its purpose is to label thepixels as vessel or non-vessel. The systemapplies neural network directly to the im-age pixels without prior feature detection.Since angiograms are typically very large,the network is applied to a small subwin-dow which slides across the angiogram.Pixels of this subwindow are directly inputto the network. Prelabeled angiograms areused to train the network. The algorithmis compared with two other algorithms,bayesian maximum likelihood algorithmand iterative ternary classification algo-rithm [Kottke and Sun 1990b], and theclassification accuracy of three methodsare compared.
Hunter et al. [1995] combine neuralnetwork-based approach with knowledge-guided snakes to extract Left Ventricu-lar (LV) boundaries in Echocardiographicimages. Their method comprises threestages. In first two stages, neural network-based radial search algorithm detects can-didate LV edge points along a set ofradial search lines which define the po-lar domain. The final boundary extrac-
tion takes place in this polar domain. Inthe third stage, Knowledge-guided Snakesautomatically select LV boundary pointsfrom the candidate edge points. They de-velop a new two stage Dynamic Program-ming method reported to be faster thanthe original method in their snakes imple-mentation. Due to the Knowledge-guidedSnakes used in the extraction process, thiswork can also be classified as a paramet-ric deformable model approach listed inSection 4.1.1.
Kottke and Sun [1990b] apply an itera-tive ternary classifier and learning processto extract arterial structures in coronaryangiograms. Their algorithm initially clas-sifies the image as “artery”, “background”and “undecided”. Then, a two step iter-ative process is employed to adjust thethreshold to further classify the “un-decided” pixels. Threshold adaptation isgoverned by a learning algorithm basedon the line and consistency measure-ments around the pixels. The perfor-mance of the algorithm is compared totwo other general purpose segmentationalgorithms, a relaxation algorithm devel-oped by Rosenfeld and Smith [1981], anda scattering-based approach developed byOtsu [1979].
Shiffman et al. [1996] combine an au-tomated neural network-based segmenta-tion approach with manual editing to ex-tract sections from computed tomographyangiography (CTA) image volumes. Theyaim to facilitate the visualization of vas-culature by editing the target sections inthe volume prior to 3D reconstruction. Thefirst step of the method involves an au-tomatic segmentation of an entire imagesequence of CTA sections which producesa set of labelled image sections. The nextstep requires the user to view the result-ing images and edit one or more sections.In the final step, user edited segments andthe remaining section are connected to ex-tract the final image segments based onlabel identity. Automated segmentation isachieved in two steps; a multilevel thresh-olding and then smoothing the result-ing fuzzy regions. Two clustering meth-ods, K-means clustering algorithm and aneural network-based algorithm based on
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

112 C. Kirbas and F. Quek
Fig. 16. (a) MIP of the CTA data set, and (b) MIP of the spine extracted using conventionalconnectivity (Reproduced from Shiffman et al. [1996]).
Fig. 17. (a) MIP of the aorta via conventional connectivity, and (b) MIP of the aorta extractedusing the developed method (Reproduced from Shiffman et al. [1996]).
Kohonen’s self-organizing feature maps,has been implemented and the results arecompared.
Figures 16 and 17 show maximum in-tensity projections (MIP) of complete dataset and the results produced by con-ventional connectivity and the methoddeveloped.
7.1. 3D Reconstruction of Vessels
The works of Cronemeyer et al. [1992] andShiffman et al. [1996] are related to 3D re-construction of the vessels. A comparisontable of papers reviewed in this section isgiven in Figure 18.
8. TUBE-LIKE OBJECT DETECTIONAPPROACHES
This class of research approaches dealswith the extraction of tubular structuresfrom images. This is actually a “miscel-laneous” class of approaches that may beapplicable to vascular extraction in thatvessels are tubular entities, but these ap-proaches were not designed for vessel ex-traction per se.
Davies [1987] develops a system to lo-cate circular objects to be used in indus-trial automation. His system aims to emu-late standard Hough transform techniqueand is claimed to work faster. The stan-dard Hough transform to locate round
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 113
Fig. 18. Comparison of the neural network-based approaches.
objects employs an edge detector. The re-sulting edge information is used to findcandidate center locations. Finally, can-didate center locations are averaged toobtain an estimate of the position ofthe object’s center. These operations arecostly for the industrial application do-main. Davies’ technique employs imagesampling and a very small neighborhoodto improve the speed. The strategy re-quires two passes over the image to de-termine the center location. The divisions,multiplications and square root calcula-tions are replaced by 2-element averagingoperations to reduce computation.
Grimson et al. [1993] observe that cylin-drical objects in 3D range images ap-pear as conic profiles along the scan lines.They use a conic detector to detect suchprofiles and extract tubular objects fromrange images obtained from an activestructured-light laser scanner. Their ap-proach consists of five steps: (1) Locationand orientation of cylindrical tube seg-ments are hypothesized in world coordi-nate to get rough estimate of the tubeposition; (2) The hypotheses are matchedagainst tube model to get an estimate ofthe position and orientation of the wholetube; (3) A scanning path is planned totrace the whole tube; (4) A tube model iscreated by scanning the tube in detail atclose range, which gives high accuracy in-formation; and (5) The created tube modelis matched to the model used and the defi-ciencies in the detected tube are reported.
Mayer et al. [1997] develop a model forthe extraction of roads from aerial im-ages. Their model has three basic compo-nents. First, a multiscale modeling is used
Fig. 19. Extracted roads from an aerial image (Re-produced from Mayer et al. [1997]).
to combine fine scale detailed informationsuch as road markings, with coarse scaleabstract information such as the road net-work. Second, context information in theform of relations to other objects suchas buildings and trees is exploited to ex-tend the model. This facilitates the extrac-tion process to focus on the target objects.Third, ribbon-snakes are used to extractroads in fine scales. Using ribbon-snakesis reported to help the extraction of theroads occluded by shadows cast by build-ings and trees in the image. Figure 19shows extracted roads in an aerial im-age. Due to the ribbon-snakes used, thiswork can also be classified as a parametricdeformable model listed in Section 4.1.1.This work is also a multiscale approachlisted in Section 3.1.
Kompatsiaris et al. [2000] detect bound-aries of stents in angiographic images.Their method first constructs a training
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

114 C. Kirbas and F. Quek
set using perspective projection of variousdeformations of the 3D wireframe modelof the stent. Initial detection of the stentis accomplished by using the training setfor deriving a multivariate Gaussion den-sity estimate based on eigenspace decom-position using Principal Component Anal-ysis (PCA). Then, a maximum likelihoodestimation framework is formulated to ex-tract the stent. Finally, a 2D active contourmodel (snake) is used to refine the detectedstent. Initialization of the snake is accom-plished by an iterative technique consid-ering the geometry of the stent. This workcan also be classified as a parametric de-formable model listed in Section 4.1.1 dueto the active snakes used in refining thedetected stent.
Thirion et al. [2000] incorporate highlevel constraints and user feedback toovercome some of the drawbacks that tra-ditional image segmentation methods facein complex environments. Their systemaims to segment pipelines in industrialimages. They try to handle the challengesdue to shading, highlights, and textualvariations by fusing physics-based vision,edge and texture analysis, probabilisticlearning, and the graph-cut formalismmethods. The parameters of the physics-based model of color and highlights ofthe pipes are learned from a set of train-ing windows selected by user from in-put images. Next, a bank of filters to de-tect features like color/highlight, contour,and shading/anisotropy are applied to theimage. A probabilistic graph which de-scribes the image is built from the outputof the previous step. Finally, segmentationis performed by using graph cut method.Segmentation can be improved throughuser feedback into the graph. This workcan also be classified as a matching fil-ters approach listed in Section 3.6 due tothe bank of filters used in segmentationprocess.
Huang and Stockman [1993] describea system that uses generalized cylindersto extract tubular structures in 2D inten-sity images. The system combines contour-based and shading-based methods anduses a 3D tube model. These cylindersare defined by a cross-sectional element
that is swept along the axis of the tubeusing some sweep rules. There are twomain stages in the algorithm: local recog-nition stage and global recognition stage.The first step in the local recognitionstage is the detection of reliable contourprimitives. These primitives provide con-straints for the localization of the tubes.Next, optimal filters are generated dy-namically and matched against the data inorder to verify the shading property of thetubes under detection. In the global recog-nition stage, locally verified tubes fromthe first stage are used as seeds and areswept along the axis of the tube usingsome sweep rule using best fit constraint.The key issue is to control the smoothnessof the sweeping. Huang and Stockman[1993] shows results of this algorithm ap-plied to the extraction of tree roots.
This work can also be classified asa generalized cylinders model listed inSection 4.3 due to the generalized cylin-ders model used. We can also put this workunder the matching filters approach listedin Section 3.6 due to the matched filtersused in the segmentation process.
Parvin et al. [1994] develop a techniquefor detection, tracking, and representationof tubular objects in images. In this tech-nique, at the macro level, geometric prop-erties are used to localize and to track theobjects and at the micro level, high andlow-level constraints are used to modelthe detection and tracking the subsys-tems. In the object detection process, per-ceptually significant features from the im-age are extracted and used as high-levelcues in refining the object boundaries. Theresult of their approach is shown by animplementation that detects and tracksDNA molecules obtained through epi-fluorescence microscopy. High-level cuesin the application domain are ribbon-like structures defined by a collection ofsubstructures called “U-shapes” and anti-parallel segments. These isolated seg-ments are grouped with respect to the ob-ject model in terms of a bounding polygon.This global representation is then refinedusing local pixel activities. Dynamic pro-gramming is employed in the refinementprocess. The refined contour is projected
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 115
Fig. 20. Comparison of the tube-like object detection approaches.
and updated in every consecutive frameto track the object in a time sequence ofimages. The system also provides an axisof symmetry representation of object forsubsequent scientific analysis.
This system has some limitations. First,the detection subsystem is dependent onthe correct computation of local symme-tries. The system is unable to probe theimage further and to infer additional miss-ing local symmetries. Next, the track-ing subsystem assumes that the normallines to the smooth polygon intersect theactual boundary of the object. The sys-tem has difficulty with rapidly deformingobjects. Finally, shape representation isbased on finding the end points of the ob-ject which are hypothesized by the cur-vature peaks along the contour. Due tothe noise, these peaks may not be locallyaccurate.
This work can also be classified asa Parametric deformable model listed inSection 4.1.1. A comparison table of pa-pers reviewed in this section is given inFigure 20.
9. CONCLUSION
Segmentation algorithms form theessence of medical image applicationssuch as radiological diagnostic systems,multimodal image registration, creatinganatomical atlases, visualization, andcomputer-aided surgery. Even thoughmany promising techniques and algo-rithms have been developed, it is still an
open area for more research. The futuredirection of segmentation research willbe towards developing faster and moreaccurate more automated techniques.
Fast advances in radiological imagingsystems result in high volume patientimages. Processing of these images inradiological diagnostic systems requiresfast segmentation algorithms. One way toachieve faster segmentation results is todevelop parallel algorithms. Cronemeyeret al. [1992] exploit the parallel nature ofthe hardware and develop a fast skeletonfinder algorithm. Neural network-basedapproaches also achieve faster segmenta-tion due to their parallel nature. Anotherapproach to achieve faster segmentationis to employ multiscale processing tech-nique in which major structures are ex-tracted using low-resolution images whilefine structures are extracted using high-resolution images.
Another way to achieve fast process-ing of radiological images is to exploitthe developments in the current technol-ogy which produces high speed processorswith less cost. One can create a farm ofcomputer systems and let each system pro-cess an image at a time. This will result inparallel processing of images using a se-quential algorithm.
Accuracy of the segmentation process iscrucial due to the nature of the work and isessential to achieve more precise and re-peatable radiological diagnostic systems.Accuracy can be improved by incorporat-ing a priori information on vessel anatomy
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

116 C. Kirbas and F. Quek
and letting high level knowledge guide thesegmentation algorithm.
Even though expert knowledge andguidence is essential in segmentation sys-tems, shear volume of the medical imagedata requires more automatic segmenta-tion systems to reduce the work load.
We provide a survey of current vesselsegmentation methods. We have tried tocover both early and recent literature re-lated to vessel segmentation algorithmsand techniques. Our aim was to introducethe current segmentation techniques. Weintended to give the practitioner a frame-work for the existing research and to in-troduce interested parties to the panoplyof vessel segmentation literature. We willcontinue to update this review with newreferences and will post it on vislab.cs.vt.edu/review/extraction.html web address.
REFERENCES
AGIN, G. AND BINFORD, T. 1976. Computer descrip-tion of curved objects. IEEE Trans. Comput.C-25, 439–449.
ARMANDE, N., MONGA, O., AND MONTESINOS, P. 1995.Extraction of thin nets in grey-level images. InProceedings of Scandinavian Conference on Im-age Analysis. 287–295.
ARMANDE, N., MONTESINOS, P., AND MONGA, O. 1999.Thin nets extraction using multi-scale approach.Comput. Vis. Image Understand. 73, 2, 248–257.
AYACHE, N. 1994. Medical computer vision, virtualreality and robotics. Image Vis. Comput. 13, 4,295–313.
AYACHE, N., GUEZIEC, A., THIRION, J., AND GOURDON, A.1993. Evaluating 3-d registration of ct-scanimages using crest lines. Math. Meth. Med. Imag.II 2035, 06 (July), 60–71.
AYLWARD, S. AND BULLITT, E. 2001. Analysis of theparameter space of a metric for registering 3dvascular images. In Proceedings of the Interna-tional Conference on Medical Image Computingand Computer-Assisted Intervention.
AYLWARD, S. AND BULLITT, E. 2002. Initialization,noise, singularities, and scale in height ridgetraversal for tubular object centerline extrac-tion. IEEE Trans. Med. Image. 21, 2 (Feb.), 61–75.
AYLWARD, S., JOMIER, J., WEEKS, S., AND BULLITT, E.2002. Registration and analysis of vascular im-ages. Int. J. Comput. Vision.
AYLWARD, S., PIZER, S., BULLITT, E., AND EBERL, D.1996. Intensity ridge and widths for tubularobject segmentation and description. In Pro-ceedings of the Workshop on Math. Methods inBiomed. Image Analysis. 131–138.
BINFORD, T. 1971. Visual perception by computer.In IEEE Conf. on Sys. and Controls.
BOMBARDIER, V., JALUENT, M., BUBEL, A., AND BREMONT,J. 1997. Cooperation of two fuzzy segmenta-tion operators for digital subtracted angiogramsanalysis. In IEEE Conference on Fuzzy Systems.Vol. 2. 1057–1062.
BORS, A. G. AND PITAS, I. 1998. Object segmenta-tion and modeling in volumetric images. In Proc.Wksp on Non-Linear Model Based Image Analy-sis. 295–300.
BUHLER, K., FELKEL, P., AND LA CRUZ, A. 2002.Geometric methods for vessel visualizationand quantification—A survey. Tech. Rep.TR VRVis 2002 035, VRVis Research Cen-ter,Vienna, Austria.
BULLITT, E. AND AYLWARD, S. 2001. Analysis of time-varying images using 3d vascular models. InProc. Applied Imagery Pat. Recog. Works. 9–14.
BULLITT, E., AYLWARD, S., LIU, A., STONE, J., MUKHERJI,S., COFFEY, C., GERIG, G., AND PIZER, S. 1999. 3dgraph description of the intracerebral vascula-ture from segmented mra and test of accuracyby copariosn with x-ray angiograms. Inf. Proc.Med. Imag. 1613, 308–321.
BULLITT, E., AYLWARD, S., SMITH, K. MUKHERJI, S.,JIROUTEK, M., AND MULLER, K. 2001. Symbolicdescription of intracerebral vessels segmentedfrom MRA and evaluation by comparison with x-ray angiograms. IEEE Med. Image Anal. 5, 157–169.
CANNY, J. 1983. Finding edges and lines in images.Tech. Rep. 720, MITAIL.
CASELLES, V., CATTE, F., COLL, T., AND DIBOS, F. 1993.A geometric model for active contours in imageprocessing. Numer. Math. 66, 1, 1–32.
CHAN, R., KARL, W., AND LEES, R. 2000. A newmodel-based technique for enhanced small-vessel measurements in x-ray cine-angiograms.IEEE Trans. on Med. Image 19, 3 (March), 243–255.
CHANDRINOS, K. V., PILU, M., FISHER, R. B., AND
TRAHANIAS, P. E. 1998. Image processing tech-niques for the quantification of atheroscleroticchanges. In Mediterranian Conf. Medical andBio. Eng. and Computing.
CHAUDHURI, S., KATZ, N., NELSON, M., AND GOLDBAUM,M. 1989. Detection of blood vessels in retinalimages using two dimensional blood vessel fil-ters. IEEE Trans. on Med. Img. 8, 3 (Sept.).
CHEN, J., SATO, Y., AND TAMURA, S. 1998. Orienta-tion space filtering for multiple orientation linesegmentation. In Proc. of the IEEE Conf. onCVPR. 311–317.
CHEN, J., SATO, Y., AND TAMURA, S. 2000. Orienta-tion space filtering for multiple orientation linesegmentation. PAMI 22, 5 (May), 417–429.
CHEN, Q., STOCK, K., PRASAD, P., AND HATABU, H. 1999.Fast magnetic resonance imaging techniques.European J. of Radio. 29, 2 (Feb.), 90–100.
CHWIALKOWSKI, M., IBRAHIM, Y., HONG, F., AND PESHOCK,R. 1996. A method for fully automated
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 117
quantitative analysis of arterial flow usingflow-sensitized MR images. Comp. Med. Imag-ing and Graphics 20, 5, 365–378.
CLAK, J. 1991. Neural network modelling. Physicsin Med. and Bio. 36, 1259–1317.
CLARKE, L., VELTHUIZEN, R., CAMACHO, M., HEINE, J.,VAIDYANATHAN, M., HALL, L., AND THATCHER, R.1995. MRI segmentation: Methods and appli-cations. Magne. Reson. Imaging 13, 3, 343–368.
COTE, B., HART, W., GOLDBAUM, M., KUBE, P., AND
NELSON, M. 1994. Classifiction of blood ves-sels in images of the ocular fundus. Tech. Rep.CS94-350, UCSD.
CRONEMEYER, J., HEISING, G., AND ORGLMEISTER, R.1992. A fast skeleton finder for parallel hard-ware. In IEEE Computers in Cardiology. 23–26.
DAVIES, E. 1987. A high speed algorithm for circu-lar object detection. Pattern Rec. Let. 6, 323–333.
DO CARMO, M. 1976. Differential geometry ofcurves and surfaces. PH.
DONIZELLI, M. 1998. Region-oriented segmenta-tion of vascular structures from dsa images us-ing mathematical morphology and binary regiongrowing. In Proc. of the Works. Image Proces. forthe Medicine. Vol. 12.
DUNCAN, J. S. AND AYACHE, N. 2000. Medical im-age analysis: Progress over two decades and thechallenges ahead. PAMI 22, 1 (Jan.), 85–105.
EIHO, S. AND QIAN, Y. 1997. Detection of coronaryartery tree using morphological operator. IEEEComput. Cardiol. 24, 525–528.
FELKEL, P., WEGENKITTL, R., AND KANITSAR, A. 2001.Vessel tracking in peripheral CTA datasets—Anoverview. In Spring Conf. on Computer Graph.232–239.
FESSLER, J. A. AND MACOVSKI, A. 1991. Object-based3-d reconstruction of arterial trees from mag-netic resonance angiograms. IEEE Trans. onMed. Image 10, 1 (Mar.), 25–39.
FIGUEIREDO, M. AND LEITAO, J. 1995. A nonsmooth-ing approach to the estimation of vessel contoursin angiograms. IEEE Trans. on Med. Image 14,162–172.
FRITSCH, D., EBERLY, D., PIZER, S., AND MCAULIFFE, M.1995. Simulated cores and their application inmedical imaging. Inf. Proc. Med. Imaging, 365–368.
FRITSCH, D., PIZER, S., MORSE, B., EBERLY, D., AND LIU,A. 1994. The multiscale medial axis and itsapplications in image registration. Pattern Rec.Let. 15, 5, 445–452.
GEIGER, D., GUPTA, A., COSTA, L., AND VLONTZOS,J. 1995. Dynamic programming for detecting,tracking, and matching deformable contours.PAMI 17, 3, 294–302.
GOLDBAUM, M., MOEZZI, S., TAYLOR, A., CHATTERJEE, S.,BOYD, J., HUNTER, E., AND JAIN, R. 1996. Auto-mated diagnosis and image understanding withobject extraction, object classification, and infer-encing in retinal images. In IEEE Int. Conf. onImage Processing. Vol. 3.
GRIMSON, W., LOZANO-PEREZ, T., NOBEL, N., AND WHITE,S. 1993. An automatic tube inspection systemthat finds cylinders in range data. In Proc. of theIEEE Conf. on CVPR. 446–452.
GUEZIEC, A. AND AYACHE, N. 1994. Smoothing andmatching of 3-d space curves. Int. J. of Comp.Vision 12, 1 (Jan.), 79–104.
GUEZIEC, A., PENNEC, X., AND AYACHE, N. 1997. Med-ical image registration using geometric hashing.IEEE Computational Sci. Eng., Special Issue onGeometric Hashing 4, 4, 29–41, Oct–Dec.
GULLBERG, G. AND ZENG, G. 1992. A cone-beam fil-tered backpropagation reconstruction algorithmfor cardiac single photon emission computed to-mography. IEEE Trans. on Med. Img. MI-11, 91–101.
GUO, D. AND RICHARDSON, P. 1998. Automatic vesselextraction from angiogram images. IEEE Com-put. Cardiol. 25, 441–444.
HARIS, K., EFSTRATIADIS, S. N., MAGLAVERAS, N.,GOURASSAS, J., PAPPAS, C., AND LOURIDAS, G.1997a. Automated coronary artey extractionusing watersheds. IEEE Comput. Cardiol. 24,741–744.
HARIS, K., EFSTRATIADIS, S., MAGLAVERAS, N., AND
PAPPAS, C. 1997b. Semi-automatic extractionof vascular networks in angiograms. In IEEEConf. Eng. in Medicine and Bio. 1067–1068.
HART, M. AND HOLLEY, L. 1993. A method of auto-mated coronary artey tracking in unsubtractedangiograms. In IEEE Comput. Cardiol. 93–96.
HART, W. E., GOLDBAUM, M., COTE, B., KUBE, P.,AND NELSON, M. R. 1997. Automated measure-ment of retinal vascular tortuosity. In Proc AMIAFall Conference.
HAYKIN, S. 1994. Neural Networks: A Comprehen-sive Foundation. Mcmillan College, New York.
HIGGINS, W., SYPRA, W., KARWOSKI, R., AND RITMAN,E. 1996. System for analyzing hig-resolutionthree-dimensional coronary angiograms. IEEETrans. on Med. Image 15, 377–385.
HIGGINS, W. E., SPYRA, W. J. T., RITMAN, E. L., KIM,Y., AND SPELMAN, F. A. 1989. Automatic extrac-tion of the arterial tree from 3-d angiograms.In IEEE Conf. Eng. in Medicine and Bio. Vol. 2.563–564.
HOOVER, A., KOUZNETSOVA, V., AND GOLDBAUM, M.2000. Locating blood vessels in retinal imagesby piecewise threshold probing of a matched fil-ter response. IEEE Trans. on Med. Image 19, 3(March), 203–210.
HU, Y., ROGERS, W., COAST, D., KRAMER, C., AND REICHEK,N. 1998. Vessel boundary extraction based ona global and local deformable physical modelwith variable stiffness. Magne. Reson. Imag-ing 16, 8, 943–951.
HUANG, Q. AND STOCKMAN, G. 1993. Generalizedtube model: Recognizing 3d elongated objectsfrom 2d intensity images. In Proc. of the IEEEConf. on CVPR. 104–109.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

118 C. Kirbas and F. Quek
HUNTER, I., SORAGHAN, J., AND MCDONAGH, T. 1995.Fully automatic left ventricular boundary ex-traction in echocardiographic images. In IEEEComputers in Cardiology. 741–744.
JAIN, R., KASTURI, R., AND SCHUNCK, B. 1995. Ma-chine Vision. McGH.
KALITZIN, S., TER HAAR ROMANEY, B., SALDEN, A.,NACKEN, P., AND VIERGEVER, M. 1998. Topolog-ical numbers and singularities in scalar images:Scale-space evolution properties. J. Math. Imag-ing and Vis. 9, 253–269.
KASS, M., WITKIN, A., AND TERZOOPOULOS, D. 1988.Snakes: Active contour models. Int. J. Comput.Vision 1, 4, 321–331.
KAWATA, Y., NIKI, N., AND KUMAZAKI, T. 1995a. Anapproach for detecting blood vessel diseasesfrom cone-beam CT image. In IEEE Int. Conf.on Image Processing. 500–503.
KAWATA, Y., NIKI, N., KUMAZAKI, T., AND MOONIER, P.1995b. Characteristics measurement for bloodvessel diseases detection based on cone-beam ctimages. In IEEE Nuclear Science Symposiumand Medical Imaging Conference. Vol. 3. 1660–1664.
KAYIKCIOGLU, T. AND MITRA, S. 1992. Unique deter-mination of shape and area of coronary arterialcross-section from biplane angiograms. In IEEEComp.-Based Med. Sys. 596–603.
KAYIKCIOGLU, T. AND MITRA, S. 1993. A new methodfor estimating dimensions and 3-d reconstruc-tion of coronary arterial trees from biplane an-giograms. In IEEE Comp.-Based Med. Sys. 153–158.
KIRBAS, C. AND QUEK, F. 2002. 3d wave propagationand traceback in vascular extraction. In IEEEEng. in Medicine and Bio. and Biomed. Eng. Soc.
KITAMURA, K., TOBIS, J., AND SKLANSKY, J. 1988a. Bi-plane analysis of atheromatous coronary arter-ies. In Proc. Int. Conf. Pattern Rec. Vol. 2. 1277–1281.
KITAMURA, K., TOBIS, J., AND SKLANSKY, J. 1988b. Es-timating the 3-d skeletons and transverse areasof coronary arteries from biplane angiograms.IEEE Trans. on Med. Img. 7, 173–187.
KLEIN, A., EGGLIN, T., POLLAK, J., LEE, F., AND
AMINI, A. 1994. Identifying vascular featureswith orientation specific filters and b-splinesnakes. In IEEE Computers in Cardiology. 113–116.
KLEIN, A., LEE, F., AND AMINI, A. 1997. Quantitativecoronary angiography with deformable splinemodels. IEEE Trans. on Med. Img. 16, 468–482.
KOENDERINK, J. 1990. Solid shapes. MITP.KOHONEN, T. 1995. Self-organizing Maps.
Springer-Verlag, New York.KOLLER, T. M., GERIG, G., SZEKELY, G., AND DETTWILER,
D. 1995. Multiscale detection of curvilinearstructures in 2d and 3d image data. In Int. Conf.on Comp. Vision. 864–869.
KOMPATSIARIS, I., TZOVARAS, D., KOUTKIAS, V., AND
STRINTZIS, M. 2000. Deformable boundary de-
tection of stents in angiographic images. IEEETrans. on Med. Img. 19, 6 (June), 652–662.
KOTTKE, D. AND SUN, Y. 1990a. Region splitting ofmedical images based upon bimodality analysis.In IEEE Eng. Conf. in Medicine and Bio. Vol. 12.154–155.
KOTTKE, D. AND SUN, Y. 1990b. Segmentation ofcoronary arteriograms by iterative ternary class-sification. IEEE Trans. on Biomed. Engr. 37,778–785.
KOZERKE, S., BOTNAR, R., OYRE, S., SCHEIDEGGER, M. B.,PEDERSEN, E., AND BOESINGER, P. 1999. Auto-matic vessel segmentation using active contoursin cine phase contrast flow measurements. J. ofMag. Res. Imaging 10, 1 (July), 41–51.
KRISSIAN, K., MALANDAIN, G., AND AYACHE, N. 1996.Directional anisotropic diffusion applied to seg-mentation of vessels in 3d images. Tech. Rep.3064, INRIA.
KRISSIAN, K., MALANDAIN, G., AND AYACHE, N. 1998.Model-based multiscale detection and recon-struction of 3d vessels. Tech. Rep. 3442, INRIA.
KRISSIAN, K., MALANDAIN, G., AYACHE, N., VAILLANT, R.,AND TROUSSET, Y. 1998a. Model-based multi-scale detection of 3d vessels. Proc. of the IEEEConf. on CVPR, 722–727.
KRISSIAN, K., MALANDAIN, G., AYACHE, N., VAILLANT, R.,AND TROUSSET, Y. 1998b. Model-based multi-scale detection of 3d vessels. In Proc. IEEE Work-shop Biomed. Image Anal. 202–208.
KRISSIAN, K., MALANDAIN, G., AYACHE, N., VAILLANT, R.,AND TROUSSET, Y. 1999. Model based detectionof tubular structures in 3d images. Tech. Rep.3736, INRIA.
LECORNU, L., ROUX, C., AND JACQ, J. 1994. Extrac-tion of vessel contours in angiograms by simul-taneous tracking of the two edges. In IEEE Conf.Eng. in Medicine and Bio. Vol. 1. 678–679.
LINDEBERG, T. 1994. Scale-Space theory in Com-puter Vision. Kluwer Academic Publishers, Dor-drecht, Netherlands.
LINDEBERG, T. 1996. Edge detection and ridge de-tection with automatic scale selection. In Proc.of the IEEE Conf. on CVPR. 465.
LIU, I. AND SUN, Y. 1993. Recursive tracking ofvascular networks in angiograms based on thedetection-deletion scheme. IEEE Trans. on Med.Img. 12, 334–341.
LORENZ, C., CARSE, I. C., BUZUG, T. M., FASSNACHT,C., AND WEESE, J. 1997. Multi-scale line seg-mentation with automatic estimation of width,contrast and tangential direction in 2d and3d medical images. In Joint Conf. Comp. Vi-sion, Vir. Reality and Robotics in Medicine andRobotics, and Comput.-Assisted Surgery. 213–222.
LU, S. AND EIHO, S. 1993. Automatic detectionof the coronary arterial contours with sub-branches from an x-ray angiogram. In IEEEComputers in Cardiology. 575–578.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 119
LUO, H., QIANG, L., ACHARYA, R., AND GABORSKI, R.2000. Robust snake model. In Proc. IEEE Conf.on CVPR. Vol. 1. 452–457.
MALLADI, R., SETHIAN, J. A., AND VEMURI, B. C.1995. Shape modeling with front propagation:A level set approach. PAMI 17, 2 (Feb.), 158–175.
MAO, F., RUAN, S., BRUNO, A., TOUMOULIN, C., COLLOREC,R., AND HAIGRON, P. 1992. Extraction of struc-tural features in digital subtraction angiogra-phy. In IEEE Int. Biomed. Eng. Days. 166–169.
MARTELLI, A. 1976. An application of heuristicsearch methods to edge and contour detection.In Commun. ACM 19, 73–83.
MAYER, H., LAPTEV, I., BAUMGARTNER, A., AND STEGER,C. 1997. Automatic road extraction based onmulti-scale modeling, context, and snakes. IEEETrans. on Med. Image 32, 47–56.
MCINERNEY, T. AND TERZOPOULOS, D. 1995. Topolog-ically adaptable snakes. In Int. Conf. on Comp.Vision. 840–845.
MCINERNEY, T. AND TERZOPOULOS, D. 1996. De-formable models in medical image analysis: Asurvey. IEEE Medical Image Analysis 1, 2, 91–108.
MCINERNEY, T. AND TERZOPOULOS, D. 1997. Medicalimage segmentation using topologically adapt-able surfaces. In Conf. Comp. Vision, Vir. Real-ity and Robotics in Medicine and Robotics. Vol.1205. 23–32.
MILLER, J., BREEN, D., LORENSEN, W., O’BARA, R.,AND WOZNY, M. 1991. Geometrically deformedmodels: A method for extracting closed geomet-ric models from volume data. CG 25, 4 (July),217–226.
MOLINA, C., PRAUSE, G., RADEVA, P., AND SONKA, M.1998. 3-d catheter path reconstruction frombiplane angiograms. In SPIE. Vol. 3338. 504–512.
MONGA, O., ARMANDE, N., AND MONTESINOS, P. 1997.Thin nets and crest lines: Application to satellitedata and medical images. Computer Vision andImage Understanding 66, 1.
MONGA, O., LENGAGNE, R., AND DERICHE, R. 1994a.Crest-lines extraction in volumetric 3d medicalimages: a multiscale approach. In Proc. Int. Conf.Pattern Rec.
MONGA, O., LENGAGNE, R., AND DERICHE, R. 1994b.Extraction of the zero-crossings of the curva-ture derivatives in volumic 3d medical images: Amulti-scale approach. In Proc. of the IEEE Conf.on CVPR. 852–855.
NEKOVEI, R. AND SUN, Y. 1995. Back-propagationnetwork and its configuration for blood vesseldetection in angiograms. IEEE Trans. on NeuralNets 6, 1 (January), 64–72.
NGUYEN, T. AND SKLANSKY, J. 1986a. Computing theskeleton of coronary arteries in cineangiograms.Comput. and Biomed. Res. 19, 428–444.
NGUYEN, T. AND SKLANSKY, J. 1986b. A fast skeleton
finder for coronary arteries. In Proc. Int. Conf.Pattern Rec. 481–483.
NIKI, N., KAWATA, Y., SATO, H., AND KUMAZAKI, T. 1993.3d imaging of blood vessels using x-ray rota-tional angiographic system. IEEE Med. ImagingConf. 3, 1873–1877.
O’BRIEN, J. F. AND EZQUERRA, N. F. 1994. Auto-mated segmentation of coronary vessels in an-giographic image sequences utilizing temporal,spatial structural constraints. In Proc. SPIEConf. Visualization in Biomed. Computing.
O’DONNELL, T., BOULT, T. E., FANG, X., AND GUPTA, A.1994. The extruded generalized cylinder: A de-formable model for object recovery. In Proc. of theIEEE Conf. on CVPR. 174–181.
O’DONNELL, T., GUPTA, A., AND BOULT, T. 1997.A new model for the recovery of cylindricalstructures from medical image data. In JointConf. Comp. Vision, Vir. Reality and Roboticsin Medicine and Robotics, and Comp.-AssistedSurgery. 223–232.
OSHER, S. AND SETHIAN, J. A. 1988. Fronts propa-gating with curvature dependent speed: Algo-rithms based on hamilton-jacobi formulation.J. Computat. Phys. 79, 12–49.
OTSU, N. 1979. A threshold selection method fromgray-level histograms. IEEE Trans. on Syst.,Man, and Cybernet. 9, 62–66.
PARK, S., LEE, J., KOO, J., KWON, O., AND HONG,S. 1997. Adaptive tracking algorithm basedon direction field using ml estimation in an-giogram. In IEEE Conference on Speech and Im-age Technologies for Computing and Telecommu-nications. Vol. 2. 671–675.
PARKER, D. L., WU, J., AND VAN BREE, R. E. 1988.Three dimensional vascular reconstruction fromprojections: A theoretical review. In IEEE Conf.Eng. in Medicine and Bio.
PARVIN, B. A., PENF, C., JOHNSTON, W., AND MAESTRE,F. M. 1994. Tracking of tubular objects for sci-entific applications. In Proc. of the IEEE Conf. onCVPR. 295–301.
PELLOT, C., HERMENT, A., AND SIGELLE, M. 1994. A 3dreconstruction of vascular structures from twox-ray angiograms using an adapted simulatedannealing algorithm. IEEE Trans. on Med.Img. 13, 48–60.
PERONA, P. AND MALIK, J. 1990. Scale-space andedge detection using anisotropic diffusion.PAMI 12, 7 (July), 629–639.
PETROCELLI, R., ELION, J., AND MANBECK, K. M. 1992.A new method for structure recognition in un-subtracted digital angiograms. In IEEE Comput-ers in Cardiology. 207–210.
PETROCELLI, R., MANBECK, K., AND ELION, J. 1993.Three dimensional structure recognition in digi-tal angiograms using gauss-markov methods. InIEEE Computers in Cardiology. 101–104.
PHAM, D., XU, C., AND PRINCE, J. 2000. CurrentMethods in Medical Image Segmentation. Vol. 2.315–338.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.
120 C. Kirbas and F. Quek
PITAS, I. AND VENETSANOPOULOS, A. 1990. Nonlin-ear Digital Filters: principles and applications.Kluver Academic, Norwell, Mass.
PIZER, S., MORSE, B., AND FRITSCH, D. 1998. Zoom-invariant vision of figural shape: the mathemat-ics of cores. Computer Vision and Image Under-standing 69, 55–71.
POLI, R. AND VALLI, G. 1997. An algorithm for real-time vessel enhancement and detection. Comp.Methods and Prog. in Biomed. 52, 1 (Jan.), 1–22.
PRINET, V., MONGA, O., GE, C. XIE, S., AND MA, S. 1996.Thin network extraction in 3d images: Applica-tion to medical angiograms. In Proc. Int. Conf.Pattern Rec. 386–390.
PRINET, V., MONGA, O., AND ROCCHISANI, J. 1997.Multi-dimensional vessel extraction using crestlines. In IEEE Conf. Eng. in Medicine and Bio.Vol. 1. 393–394.
PUIG, P. 1998a. Cerebral blood vessels modeling.Tech. Rep. LSI-98-21-R, PICS.
PUIG, P. 1998b. Discrete medial axis transformfor discrete objects. Tech. Rep. LSI-98-20-R,PICS.
QUEK, F. AND KIRBAS, C. 2001. Vessel extraction inmedical images by wave propagation and trace-back. IEEE Trans. on Med. Img. 20, 2 (Feb.), 117–131.
QUEK, F., KIRBAS, C., AND CHARBEL, F. 1999.Aim:attentionally-based interaction model forthe interpretation of vascular angiograph. IEEETrans. on Inf. Tech. in Biomed. 3, 2 (June), 139–150.
QUEK, F., KIRBAS, C., AND CHARBEL, F. 2001. Aim:An attentionally-based system for the interpre-tation of angiography. In Proc. IEEE Med. Imag-ing and Augmented Reality Conf. 168–173.
QUEK, F., KIRBAS, C., AND GONG, X. 2001. Simulatedwave propagation and traceback in vascular ex-traction. In Proc. IEEE Med. Imaging and Aug-mented Reality Conf. 229–234.
RIPLEY, B. 1996. Pattern Recognition and NeuralNetworks. Cambridge University Press.
RITCHINGS, R. AND COLCHESTER, A. 1986. Detectionof abnomalities on carotid angiograms. PatternRec. Let. 4, 367–374.
ROSENFELD, A. AND SMITH, R. 1981. Thresholdingusing relaxation. PAMI 3, 598–606.
ROST, U., MUNKEL, H., AND LIEDTKE, C.-E. 1998. Aknowledge based system for the configuration ofimage processing algorithms. Fachtagung Infor-mations und Mikrosystem Technik.
RUECKERT, D. AND BURGER, P. 1995. Contour fittingusing stochastic and probabilistic relaxation forcine mr images. In Computer Assisted Radiology.137–142.
RUECKERT, D. AND BURGER, P. 1996. Shape-basedtracking and analysis of the aorta in cardiacmr images using geometrically defornable tem-plates. In Computer Assisted Radiology.
RUECKERT, D., BURGER, P., FORBAT, S. M., MOHIADDIN,
R. D., AND YANG, G. Z. 1997. Automatic track-ing of the aorta in cardiovascular mr imagesusing deformable models. IEEE Trans. on Med.Img. 16, 5 (Oct.), 581–590.
SARRY, L. AND BOIRE, J. 2001. Three-dimensionaltracking of coronary arteries from biplaneangiographic sequences using parametricallydeformable moodels. IEEE Trans. on Med.Img. 20, 12 (Dec.), 1341–1351.
SARWAL, A. AND DHAWAN, A. 1994. 3-d reconstruc-tion of coronary arteries. In IEEE Conf. Eng. inMedicine and Bio. Vol. 1. 504–505.
SATO, Y., ARAKI, T., HANAYAMA, M., NAITO, H., AND
TAMURA, S. 1998a. A viewpoint determinationsystem for stenosis diagnosis and quantifica-tion in coronary angiographic image acquisition.IEEE Trans. on Med. Img. 17, 121–137.
SATO, Y., NAKAJIMA, S., SHIRAGA, N., ATSUMI, H.,YOSHIDA, S., KOLLER, T., GERIG, G., AND KIKINIS, R.1998b. 3d multi-scale line filter for segmenta-tion and visualization of curvilinear structuresin medical images. IEEE Medical Image Analy-sis 2, 2 (June), 143–168.
SCHMITT, H., GRASS, M., RASCHE, V., SCHRAMM, O.,HAEHNEL, S., AND SARTOR, K. 2002. An x-ray-based method for the determination of the con-trast agent propagation in 3-d vessel structures.IEEE Trans. on Med. Img. 21, 3 (Mar.), 251–262.
SETHIAN, J. 1999. Level Set Methods and FastMarching Methods:Evolving Interfaces in Com-putational Geometry, Fluid Mechanics, Com-puter Vision, and Material Science. CambridgeUniversity Press, Cambridge, UK.
SETHIAN, J. A. 1996. A fast marching level setmethod for monotinically advancing fronts. InProc. of Nat. Acad. of Sci. Vol. 93. 1591–1595.
SHEN, H. AND JOHNSON, C. R. 1994. Semi-automaticimage segmentation: A bimodal thresholding ap-proach. Tech. Rep. UUCS-94-019, Univ. of Utah,Dept. of Comput. Science.
SHIFFMAN, S., RUBIN, G. D., AND NAPEL, S. 1996.Semiautomated Editing of Computed Tomogra-phy Sections for Visualization of Vasculature.Vol. 2707. SPIE.
SMETS, C., VERBEECK, G., SUETENS, P., AND OOSTERLINCK,A. 1988. A knowledge-based system for thedelineation of blood vessels on subtraction an-giograms. Pattern Rec. Lett. 8, 113–121.
SONKA, M., HLAVAC, V., AND BOYLE, R. 1999. ImageProcessing, Analysis, and Machine Vision. PWSPublishing.
SORANTIN, E., HALMAI, C., ERDOHELYI, B., PALAGYI, K.,NYUL, L., OLLE, K., GEIGER, B., LINDBICHLER, F.,FRIEDRICH, G., AND KIESLER, K. 2002. Spiral-ct-based assessment of tracheal stenoses using 3-d-skeletonization. IEEE Trans. on Med. Img. 21, 3(Mar.), 263–273.
STANSFIELD, S. 1986. Angy: A rule-based expertsystem for automatic segmentation of coro-nory vessels from digital subtracted angiograms.PAMI 8, 3 (Mar.), 188–199.
ACM Computing Surveys, Vol. 36, No. 2, June 2004.

Vessel Extraction Techniques and Algorithms 121
STEVENSON, D. 1987. Working towards the auto-matic detection of blood vessels in x-ray an-giograms. Pattern Rec. Lett. 6, 107–112.
STOCKETT, M. AND SOROKA, B. 1992. Extractingspinal cord contours from transaxial mr im-ages using computer vision techniques. In IEEEComp.-Based Med. Sys. 1–8.
SUMMERS, P. AND BHALERAO, A. 1995. Derivationof pressure gradients from magnetic resonanceangiography using multi-resolution segmenta-tion. In Proceedings of International Conferenceon Image Processing and its Applications. 404–408.
SUN, Y. 1989. Automated identification of vesselcontours in coronary arteriograms by an adap-tive tracking algorithm. IEEE Trans. on Med.Img. 8, 78–88.
THACKRAY, B. AND NELSON, A. 1993. Semi-automaticsegmentation of vascular network images usinga rotating structuring element (rose) with math-ematical morphology and dual feature thresh-olding. IEEE Trans. on Med. Img. 12, 385–392.
THIRION, B., BASCLE, B., RAMESH, V., AND NAVAB, N.2000. Fusion of color, shading and boundary in-fomation for factory pipe segmentation. In Proc.of the IEEE Conf. on CVPR. Vol. 2. 349–356.
TOLEDO, R., ORRIOLS, X., BINEFA, X., RAVEDA, P., VITRIA,J., AND VILLANUEVA, J. J. 2000. Tracking elon-gated structures using statistical snakes. InProc. of the IEEE Conf. on CVPR. 157–162.
TOLIAS, Y. AND PANAS, S. 1998. A fuzzy vessel track-ing algorithm for retinal images based on fuzzyclustering. IEEE Trans. on Med. Img. 17, 263–273.
TOZAKI, T., KAWATA, Y., NIKI, N., OHMATSU, H., AND
MORIYAMA, N. 1995. 3-d visualization of blood
vessels and tumor using thin slice ct. In IEEENuclear Science Symposium and Medical Imag-ing Conference. Vol. 3. 1470–1474.
UMBAUGH, S. 1998. Computer Vision and MachineProcessing. PHPTR.
VAN DER WEIDE, R., BAKKER, C., AND VIERGEVER,M. 2001. Localization of intravascular de-vices with paramagnetic markers in mr images.IEEE Trans. on Med. Img. 20, 10 (October),1061–1071.
WOOD, S., QU, G., AND ROLOFF, L. 1995. Detectionand labeling of retinal vessels for longitidunalstudies. In IEEE Int. Conf. on Image Processing.Vol. 3. 164–167.
XU, C., PHAM, D., AND PRINCE, J. 2000. MedicalImage Segmentation Using Deformable Models.SPIE Press, Chapter 3, 129–174.
XU, C. AND PRINCE, J. 1998. Snakes, shapes, andgradient vector flow. IEEE Trans. on Image Pro-ces. 7, 359–369.
YIM, P., CHOYKE, P., AND SUMMERS, R. 2000. Gray-scale skeletonization of small vessels in mag-netic resonance angiography. IEEE Trans. onMed. Img. 19, 6 (June), 568–576.
ZANA, F. AND KLEIN, J. 1997. Robust segmentationof vessels from retinal angiography. In IEEE In-ternational Conference on Digital Signal Pro-cessing. Vol. 2. 1087–1090.
ZERROUG, M. AND NEVATIA, R. 1993. Quasi-invariant properties and 3-d shape recovery ofnon-constant generalized cylinders. In Proc. ofthe IEEE Conf. on CVPR. 96–103.
ZHOU, L., RZESZOTARSKI, M., SINGERMAN, L., AND
CHOKREFF, J. 1994. The detection and quan-tification of retinopathy using digital an-giograms. IEEE Trans. on Med. Img. 13, 619–626.
Received February 2003; accepted July 2004
ACM Computing Surveys, Vol. 36, No. 2, June 2004.