applications of synchronous circuits ( class 10.2 – 3/28/2013)
DESCRIPTION
Applications of Synchronous Circuits ( Class 10.2 – 3/28/2013). CSE 2441 – Introduction to Digital Logic Spring 2013 Instructor – Bill Carroll, Professor of CSE. Today’s Topics. FSM application examples Sequence recognizer Code converter Controller Synchronous circuit minimization - PowerPoint PPT PresentationTRANSCRIPT

Applications of Synchronous Circuits(Class 10.2 – 3/28/2013)
CSE 2441 – Introduction to Digital LogicSpring 2013
Instructor – Bill Carroll, Professor of CSE

Today’s Topics
• FSM application examples– Sequence recognizer– Code converter– Controller
• Synchronous circuit minimization– State reduction– State assignment
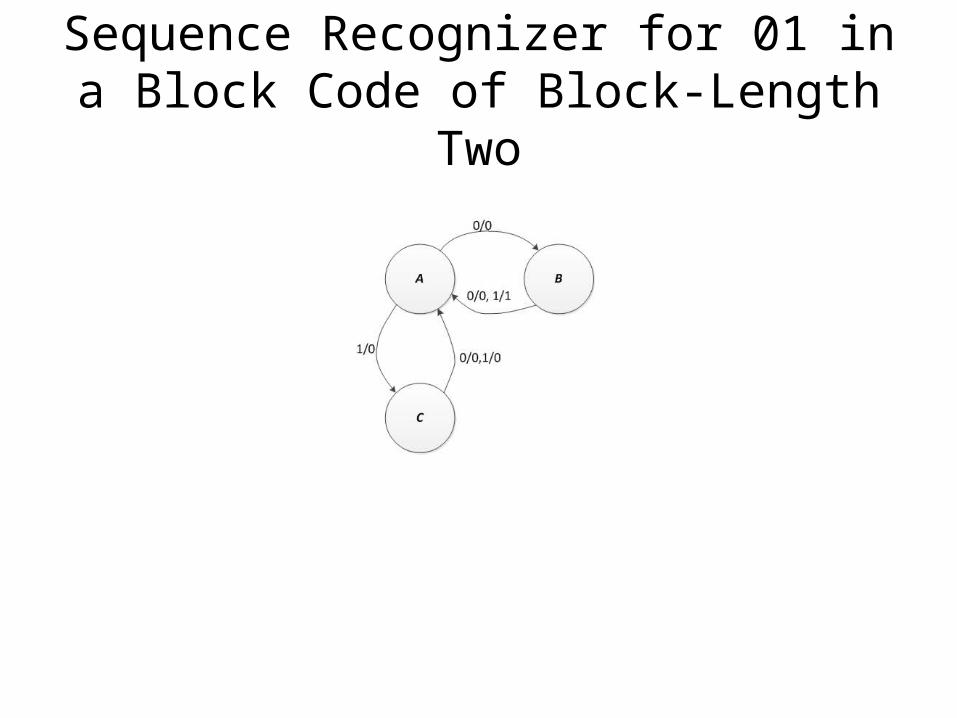
Sequence Recognizer for 01 in a Block Code of Block-Length Two

Test Your Understanding
Design a realization of the block 01 recognizer.
Use the following state assignment and JK flip flops.A: 00, B: 01, C: 10

Test Your Understanding – Self-Check
PS
x
0 1
A B/0 C/0
B A/0 A/1
C A/0 A/0
NS/z
y1y2
x
0 1
00 01/0 10/0
01 00/0 00/1
10 00/0 00/0
Y1Y2/z
y1y2
x
0 1
00 0 0
01 0 1
11 d d
10 0 0
z = xy2
y1y2
x
0 1
00 0 1
01 0 0
11 d d
10 d d
J1
y1y2
x
0 1
00 d d
01 d d
11 d d
10 1 1
K1
y1y2
x
0 1
00 1 0
01 d d
11 d d
10 0 0
J2
y1y2
x
0 1
00 d d
01 1 1
11 d d
10 d d
K2
State Table Transition/Output Table Output K-map
Excitation K-maps
J1 = xy2’ K1 = 1 or y1 J2 = x’y1’ K2 = 1 or y2

Test Your Understanding – Self-Check

Design a Recognizer for the Sequence 1111Example 8.11
Figure 8.29
Note: This solution assumes non-block sequences and allows overlap.
How would the solution change for block sequences and no overlap?
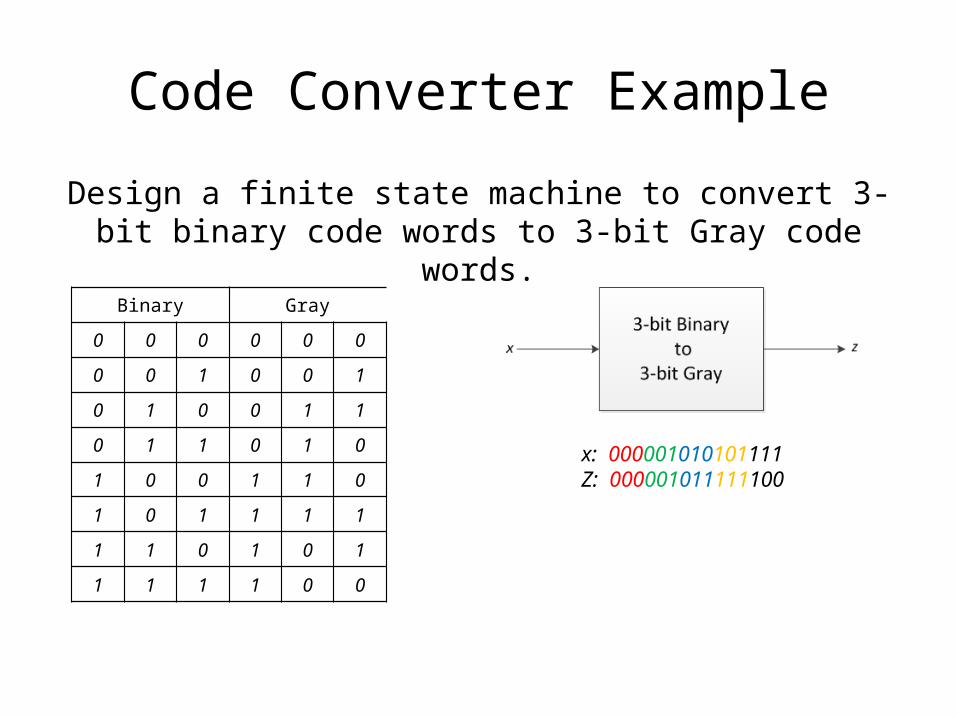
Code Converter Example
Design a finite state machine to convert 3-bit binary code words to 3-bit Gray code words.
Binary Gray
0 0 0 0 0 0
0 0 1 0 0 1
0 1 0 0 1 1
0 1 1 0 1 0
1 0 0 1 1 0
1 0 1 1 1 1
1 1 0 1 0 1
1 1 1 1 0 0
x: 000001010101111Z: 000001011111100

Three-bit Binary to three-bit Gray State Diagram
Assumes starting state A

Robot Controller -- Example 8.17
E xit
M ovableb lock s
B ottom viewof robot
R obot
W heels
Sensor(X )
Figure 8.39
Finite-State Controller – A finite state machine that produces outputs that control the behavior of an electronic or electromechanical system based on controller inputs and state.

Robot Controller Specifications
x = 1: robot in contact with an obstaclex = 0: robot not in contact with an obstacle
z1 = 1: turn leftz2 = 1: turn right
Control algorithm: When an obstacle is encountered, turn right until cleared. Next time an obstacle is encountered, turn left until cleared. Continue alternating turns as obstacles are encountered.
State A: No obstacle, last turn was leftState B: Obstacle, turn right
State C: No obstacle, last turn was rightState D: Obstacle, turn left

Robot Controller Design
Figure 8.40 (a) -- (e)
y 1y 2
(a )N S /z 1 z 2
0 /001 /01
X /Z 1 /Z 2
A B
CD
0 /00
1 /101 /10
0 /00
1 /01
0 /00
0 1x
A
B
C
D
A /00
C /00
C /00
A /00
B /01
B /01
D /10
D /10
Y 1Y 2 /z 1 z 2
0 1x
00
01
11
10
00/00
11 /00
11 /00
00/00
01/01
01/01
10/10
10/10
(b) (c )
0 0
0 0
0 1
0 1
0 1x
00
01
11
10
0 1
0 1
0 0
0 0
0 1x
00
01
11
10
0 0
1 0
1 1
0 1
0 1
00
01
11
10
z 1 z 2 Y 1
0 1
1 1
1 0
0 0
0 1x
Y 2
(d ) (e )
00
01
11
10
x
y 1y 2
y 1y 2 y 1y 2 y 1y 2 y 1y 2
z1 = xy1 z2 = xy1’

Robot Controller Excitation Equations
y1y2
x
0 1
00 0 0
01 1 0
11 d d
10 d d
y1y2
x
0 1
00 d d
01 d d
11 0 0
10 1 0
y1y2
x
0 1
00 0 1
01 d d
11 d d
10 0 0
y1y2
x
0 1
00 d d
01 0 0
11 0 1
10 d d
J1 K1 J2K2
J1 = x’y2 K1 = x’y2’ J2 = xy1’ K2 = xy1

Robot Controller Realization
x
C lock
Q 1
Q 1
J 1
Q 2
Q 2
J 2
K 1
K 2
z1
z2
(f)
Figure 8.40 (f)
z1 = xy1 z2 = xy1’
J1 = x’y2 K1 = x’y2’J2 = xy1’ K2 = xy1
Synchronous Circuit Minimization
• Eliminate redundant states– May reduce the number of flip flops needed– Usually reduces the number of combinational logic devices
needed
• Make an optimal state assignment – usually reduces the number of combinational logic devices needed

Redundant States in Synchronous Circuits
Removal of redundant states is important because– Cost: the number of memory elements is directly related to the
number of states– Complexity: the more states the circuit contains, the more complex
the design and implementation becomes– Aids failure analysis: diagnostic routines are often predicated on the
assumption that no redundant states exist

Equivalent States
• States S1, S2, …, Sj of a completely specified sequential circuit are said to be equivalent if and only if, for every possible input sequence, the same output sequence is produced by the circuit regardless of whether S1, S2, …, Sj is the initial state.
• Let Si and Sj be states of a completely specified sequential circuit. Let Sk and Sl be the next states of Si and Sj, respectively for input Ip.
Si and Sj are equivalent if and only if for every possible Ip the following are conditions are satisfied.– The outputs produced by Si and Sj are the same,
– The next states Sk and Sl are equivalent.
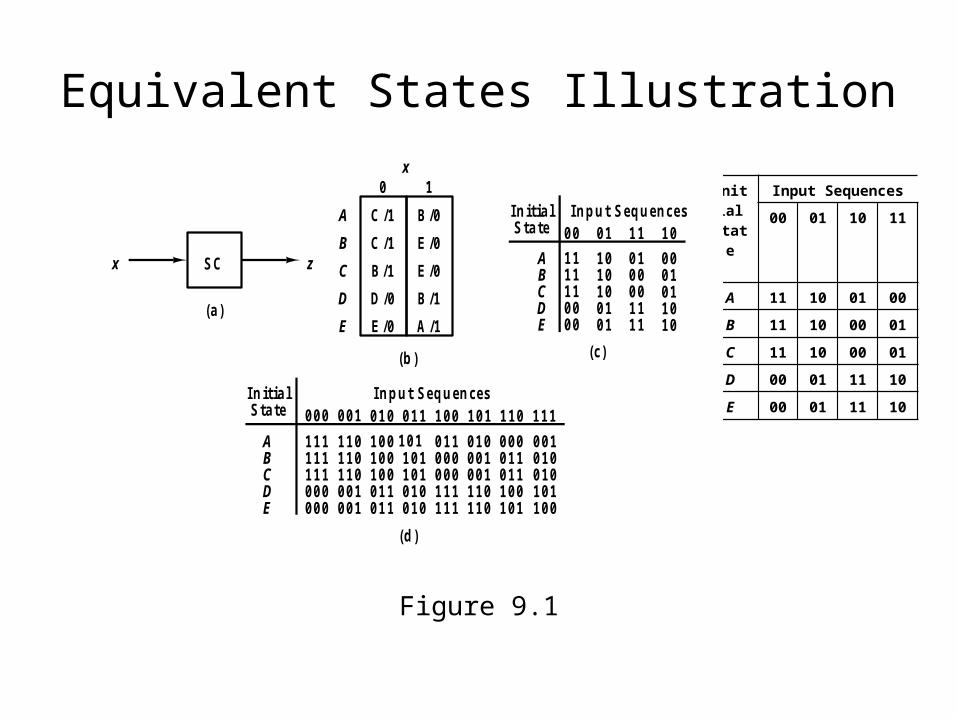
Equivalent States Illustration
S C
In itia lS ta te
zx
(d )
ABCDE
In p u t S eq u en ces0 0 0 0 0 1 0 1 0 0 11 1 0 0 1 0 1 11 0 11 1
11 111 111 10 0 00 0 0
11 011 011 00 0 10 0 1
1 0 01 0 01 0 00 110 11
1 0 11 0 11 0 10 1 00 1 0
0 110 0 00 0 011 111 1
0 1 00 0 10 0 111 011 0
0 0 00 110 111 0 01 0 1
0 0 10 1 00 1 01 0 11 0 0
(a )
(b )
0 1x
A
B
C
D
E
C /1
C /1
B /1
D /0
E /0
B /0
E /0
E /0
B /1
A /1
(c)
1111110 00 0
1 01 01 00 10 1
0 10 00 01111
0 00 10 11 01 0
ABCDE
In itia lS ta te
In p u t S eq u en ces0 0 0 1 1 011
Figure 9.1
InitialState
Input Sequences
00 01 10 11
A 11 10 01 00
B 11 10 00 01
C 11 10 00 01
D 00 01 11 10
E 00 01 11 10

Methods for Finding Equivalent States
• Inspection• Partitioning• Implication Tables

Finding Equivalent States By Inspection
0 1x
(a )
A
B
C
D
B /0
C /0
D /1
C /0
C /1
A /1
B /0
A /1
0 1x
(b )
A
B
C
B /0
C /0
B /1
C /1
A /1
B /0
0 1x
(c )
A
B
C
D
B /0
B /0
D /1
D /0
C /1
A /1
B /0
A /1
0 1x
(d )
A
B
C
B /0
B /0
B /1
C /1
A /1
B /0
0 1x
(e )
A
B
C
D
B /0D /0
D /1
B /0
C /1
A /1
B /0
A /1
Figure 9.2

Equivalence Relations
• Equivalence relation: let R be a relation on a set S. R is an equivalence relation on S if and only if it is reflexive, symmetric, and transitive. An equivalence relation on a set partitions the set into disjoint equivalence classes.
• Example: let S = {A,B,C,D,E,F,G,H} and R = {(A,A),(B,B),(B,H),(C,C),(D,D),(D,E),(E,E),(E,D),(F,F),(G,G),(H,H),(H,B)}. Then P = (A)(BH)(C)(DE)(F)(G)
• Theorem: state equivalence in a sequential circuit is an equivalence relation on the set of states.
• Theorem: the equivalence classes defined by the state equivalence of a sequential circuit can be used as the states in an equivalent circuit.
Finding Equivalent States by Partitioning
• Overview – Successively refine partitions of states until two consecutive partitions are identical. States in the same block of the final partition are equivalent.
• Step 0 – P0: All states in one block.
• Step 1 – P1: Partitions are refined by outputs.
• Step 2 – P2 to Pk: Partitions are refined by next states.
• Step 3 – Pk = Pk+1: Final blocks define equivalent states.

Partitioning Example
x0 1
A C/1 B/0B C/1 E/0C B/1 E/0D D/0 B/1E E/0 A/1
Reconsider the sequential circuit from Figure 9.1 (b)
P0 = (ABCDE)P1 = (ABC)(DE)P2 = (A)(BC)(D)(E)P3 = (A)(BC)(D)(E)
Hence, B ≡ C.
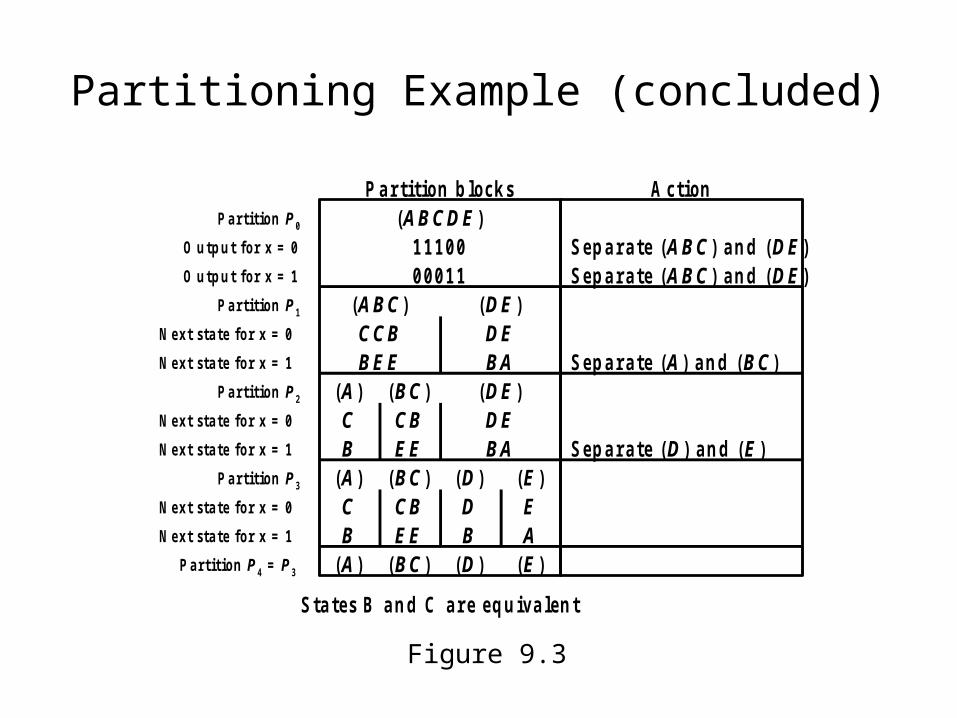
Partitioning Example (concluded)
P a rtit ion b locks A ctionP a rt it io n P 0
O u t p u t f o r x = 0
O u t p u t f o r x = 1
P a r t it io n P 1
N e x t s t a t e f o r x = 0
N e x t s t a t e f o r x = 1
P a r t it io n P 2
N e x t s t a t e f o r x = 0
N e x t s t a t e f o r x = 1
P a r t it io n P 3
N e x t s t a t e f o r x = 0
N e x t s t a t e f o r x = 1
P a r t it io n P 4 = P 3
(ABCDE )11 1 0 00 0 0 11
S ep a ra te (ABC ) a n d (DE )S ep a ra te (ABC ) a n d (DE )
(ABC )CCBBEE S ep a ra te (A ) a n d (BC )
S ep a ra te (D ) a n d (E )(BC )CBEE
(DE )DEBA
(A )CB
(BC )CBEE
(D )DB
(E )EA
S ta te s B a n d C a re eq u iva len t
(A )CB
(DE )DEBA
(BC )(A ) (D ) (E )
Figure 9.3

Test Your Understandingx
0 1A E/0 D/0B A/1 F/0C C/0 A/1D B/0 A/0E D/1 C/0F C/0 D/1G H/1 G/1H C/1 B/1
Find all equivalent states.

Test Your Understanding – Self Check
(a )
(b )
x0 1
E /0
A /1
C /0
B /0
D /1
C /0
H /1
C /1
D /0
F /0
A /1
A /0
C /0
D /1
G /1
B /1
A '
B '
C '
D '
E '
B '/0
A '/1
C '/0
E '/1
C '/1
A '/0
C '/0
A '/1
D '/1
B '/1
0 1xA
B
C
D
E
F
G
H
Figure 9.4
P0 = (ABCDEFGH)P1 = (AD)(BE)(CF)(GH)P2 = (AD)(BE)(CF)(G)(H)P3 = (AD)(BE)(CF)(G)(H)
A ≡ D: A’B ≡ E: B’C ≡ F: C’G: D’H: E’
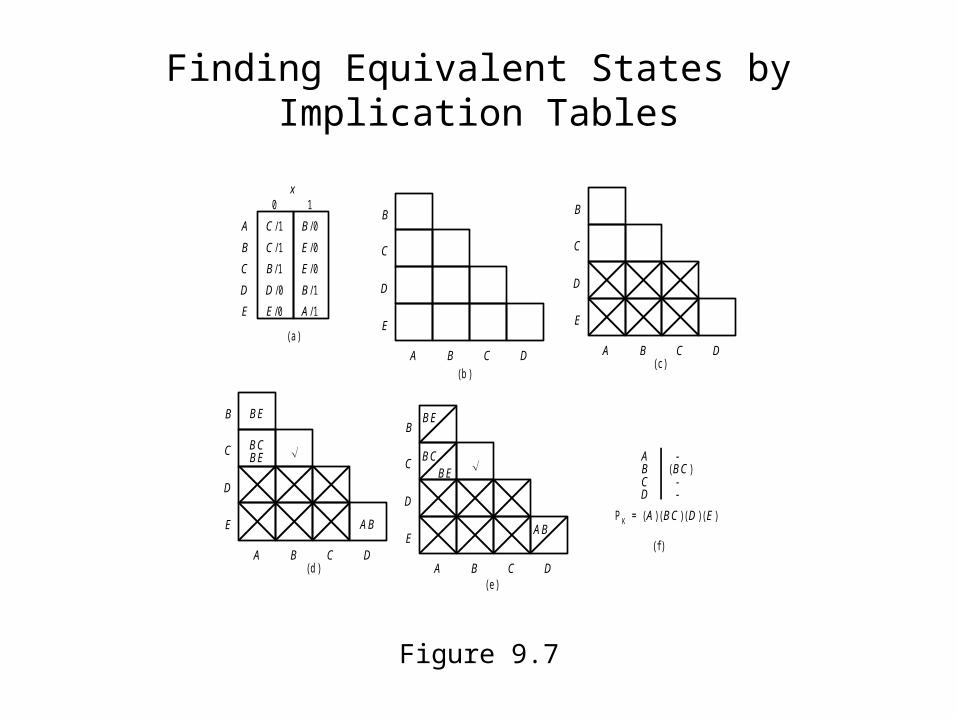
Finding Equivalent States by Implication Tables
Figure 9.7
(b )
B
C
D
E
B C DA
(a )
0 1x
A
B
C
D
E
C /1
C /1
B /1
D /0
E /0
B /0
E /0
E /0
B /1
A /1
(c)
B
C
D
E
B C DA
(d )
B
C
D
E
BE
BCBE
AB
B C DA
(e )
(f)
B
C
D
E
ABCD
BE
-(BC )
--
P K = (A )(BC )(D )(E )
BCBE
AB
B C DA

Example 9.6 -- An implication table example
(b )
B
C
D
E
ABCDEFG
(AF )(BC )(BH )(CH )----
N o te : (BC )(BH )(CH ) = (BCH )
BD
BC
B C DA
(a )
0 0 0 1x 1x 2
A
B
C
D
E
F
G
H
D /0
C /1
C /1
D /0
C /1
D /0
G /0
B /1
D /0
D /0
D /0
B /0
F /0
D /0
G /0
D /0
BD
AF
DF
DF
F GE
F
G
H
11 1 0
F /0
E /1
E /1
A /0
E /1
A /0
A /0
E /1
A /0
F /0
A /0
F /0
A /0
F /0
A /0
A /0
AF
DF
DG
AF
BG
AF
DG
AF
AFBC BC
(c )
P K = (AF )(BCH )(D )(E )(G )
AF