application guidelines for mems compass...• gyro compass – uses rapidly spinning wheel • dry...
TRANSCRIPT
Application Guidelines for MEMS
Compass
Application
RtM
Version 1.3

Agenda 2
Educational part: What is compass? How magnetic compass works, MEMS Magnetometer used as a compass …
ST MEMS Magnetometers: Overview of the key product features
Hardware Design: Schematic, PCB design …
Embedded Software: Tilt-compensated compass, Calibration and Testing
Documentation & Support Tools
AMS Application RtM 07/06/2013

What is compass? 3
AMS Application RtM
• Compass is a navigation instrument that measures direction relative to Earth surface
• There are 4 main directions: north, south, east and west
• Principle of operation • Magnetic compass – based on Earth’s magnetic field
• Gyro compass – based on rotation of the Earth
• Traditional types of compass • Conventional magnetic compass – uses magnetized pointer
• Gyro compass – uses rapidly spinning wheel
• Dry compass – used by mariners in past
• New types of compass • Liquid compass – uses liquid to limit swing and wear out
• GPS compass – based on information from GPS satellites
• Solid state compass – based on magnetic field sensors e.g. MEMS sensors
07/06/2013
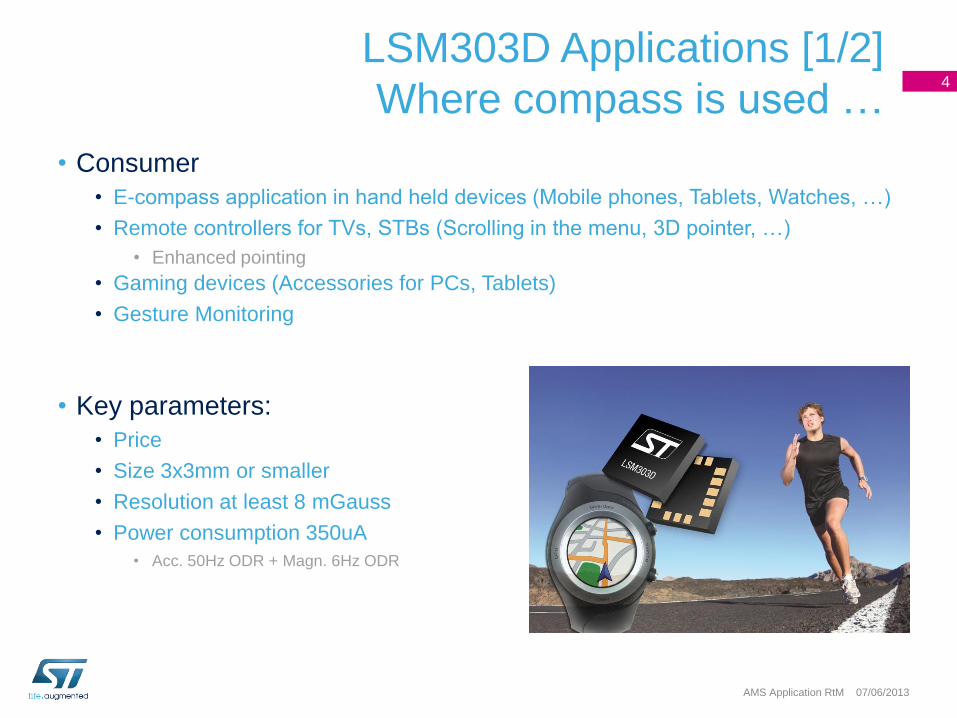
LSM303D Applications [1/2]
Where compass is used … 4
AMS Application RtM
• Consumer
• E-compass application in hand held devices (Mobile phones, Tablets, Watches, …)
• Remote controllers for TVs, STBs (Scrolling in the menu, 3D pointer, …)
• Enhanced pointing
• Gaming devices (Accessories for PCs, Tablets)
• Gesture Monitoring
• Key parameters:
• Price
• Size 3x3mm or smaller
• Resolution at least 8 mGauss
• Power consumption 350uA
• Acc. 50Hz ODR + Magn. 6Hz ODR
07/06/2013

LSM303D Applications [2/2]
Where compass is used … 5
AMS Application RtM
• Navigation • Monitoring and controlling movement of vehical, hand-held device, craft or a person from
one place to another • Portable and fixed navigation systems
• Dead reckoning
• Movement and Position detection • People, Animals and Goods Monitoring (Elderly people monitoring, cow tracking, …)
• Device special orientation
• Others • Mining - Finding direction underground, determining tunnelling
• Astronomy - Compass used for establishing a local meridian
• Building orientation – while Building churches and other houses in a prefered direction
• Key parameters: • Resolution – lower is better (down to 1 mGauss required)
• Size (not so critical as for consumer applications)
• Power consumption – lower is better. Acc. 50Hz ODR + Magn. 6Hz ODR goal is 200uA
E-compass is crucial component for Sensor Fusion Algorithms.
07/06/2013

Magnetic Field 6
AMS Application RtM
• Magnetic field is mathematical description of magnetic influence of
electric currents and magnetic materials.
• It is specified by vector - direction and magnitude (strength). In
literature it is denoted as B or H.
• Units
• tesla (T) is SI unit
• non-SI unit: gauss (G)
1 T =10 000 G
• The Earth's magnetic field is about 0.2 to 0.6 G and has a
component parallel to the Earth's surface that always points toward
the magnetic north pole.
Src: http://www.wikipedia.org
07/06/2013

How a magnetic compass works 7
AMS Application RtM
• Compass based on measurement of Earth’s magnetic field points to
“magnetic north” – the North magnetic pole of the Earth.
• In navigation, maps and directions are related to geographical or
“true north” – the Geographical North Pole.
• Magnetic north and true north poles are not at the same location. The
angle between directions to the two poles is called magnetic
declination.
• Magnetic declination is in the range of 20º and can vary widely
depending on where the compass is placed on Earth’s surface. Local
magnetic declination is given on most maps to allow the map to be
orientated with a compass.
• Positions of magnetic poles change over time (i.e. hundreds years ..)
07/06/2013

MEMS magnetometer as a compass [1/2] 8
AMS Application RtM
• Definition of attitude angles: Roll, Pitch and Heading (Yaw)
• The information shown by a compass is Heading.
• Heading is defined as the angle between the Xb axis and the
magnetic north on the horizontal plane measured in a clockwise
direction when viewing from the top of the device (or aircraft).
07/06/2013

MEMS magnetometer as a compass [2/2] 9
AMS Application RtM
• Local Earth magnetic field H has a fixed component Hh on the
horizontal plane pointing to the Earth’s magnetic north.
• This component can be measured by the MEMS magnetic sensor
sensing axes as Xh and Yh. Then the heading angle is calculated as:
Heading = arctan(Yh / Xh )
07/06/2013

Tilt Compensation using Accelerometer 10
AMS Application RtM
• If a device is tilted, then the pitch and roll angles are not equal to 0 .
• The magnetic sensor measurements XM, YM, and ZM need to be compensated to obtain Xh
and Yh by using accelerometer data.
Xh = XM • cos(Pitch) + ZM • sin(Pitch)
Yh = XM • sin(Roll) • sin(Pitch) + YM • cos(Roll) - ZM • sin(Roll) • cos(Pitch)
• Compensation using accelerometer works well for tilt in +/- 50 range.
07/06/2013

Key parameters for MEMS compass 11
AMS Application RtM
• Magnetometer range: smaller – better, +/- 1 Gauss or higher
• Magnetometer resolution: higher – better
• The device should embed accelerometer for tilt compensation
• Accelerometer resolution: 2mg or better to achieve 0.2deg precision
07/06/2013

LSM303D Key Features Sensor Module: 3-Axis Accelerometer + 3-Axis Magnetometer
12
AMS Application RtM
APPLICATION
Compensated Compass Location Based Services Map Rotation Personal Navigation
KEY FEATURES
3-axis accelerometer and 3-axis magnetometer ±2/±4/±8/±12 gauss magnetic field full-scale ±2/±4/±8/±16 g accelerometer full-scale Low accelerometer noise 150 ug/√Hz Low magnetometer noise 5 mgauss/RMS Analog supply voltage: 2.16 V to 3.6 V Digital supply voltage IOs: 1.71 V to Vdd Current consumption 300uA (A+M) 16-bit data out, FIFO for accelerometer Programmable interrupt generators for free-fall,
motion detection and magnetic field detection Automatic Set/Reset internal functionality to cancel
magnetic interference offset 3x3 mm LGA package
KEY ADVANTAGES
High performance g-sensor with antialiasing filter embedded
Offset bridge compensation of the magnetometer Compensation of the sensitivity drift over
temperature for magnetometer Low noise, low current consumption

Building MEMS Compass Process 13
AMS Application RtM
1. Hardware design to make sure the MCU can get clean raw data from the accelerometer and the magnetic sensor.
2. Accelerometer calibration to obtain parameters to convert accelerometer raw data to normalized values for pitch and roll calculation
3. Magnetic sensor calibration to obtain parameters to convert magnetic sensor raw data to normalized values for the heading calculation
4. MCU running heading computation software.
5. Test the performance of the electronic compass system.
07/06/2013

Hardware Design 14
Schematic aspects
PCB design
AMS Application RtM 07/06/2013
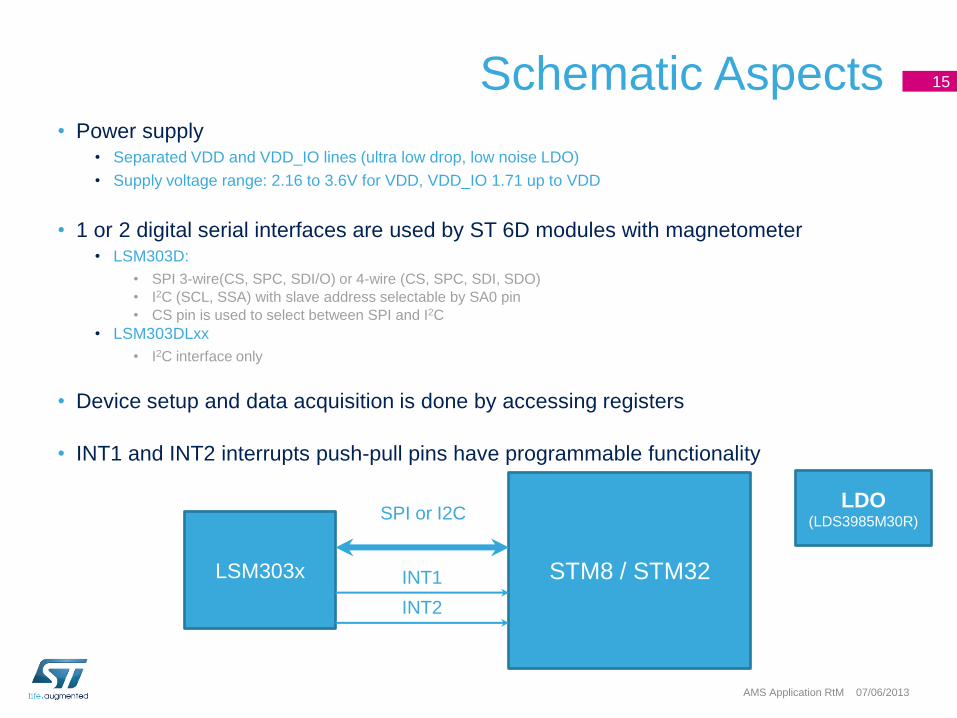
Schematic Aspects • Power supply
• Separated VDD and VDD_IO lines (ultra low drop, low noise LDO)
• Supply voltage range: 2.16 to 3.6V for VDD, VDD_IO 1.71 up to VDD
• 1 or 2 digital serial interfaces are used by ST 6D modules with magnetometer • LSM303D:
• SPI 3-wire(CS, SPC, SDI/O) or 4-wire (CS, SPC, SDI, SDO)
• I2C (SCL, SSA) with slave address selectable by SA0 pin
• CS pin is used to select between SPI and I2C
• LSM303DLxx
• I2C interface only
• Device setup and data acquisition is done by accessing registers
• INT1 and INT2 interrupts push-pull pins have programmable functionality
15
LSM303x STM8 / STM32
SPI or I2C
INT1
INT2
AMS Application RtM
LDO (LDS3985M30R)
07/06/2013

PCB Design [1/2] Compass placement
• Compass must be located in a magnetically quiet location, far
away from sources that could distort the Earth’s magnetic field from
flowing cleanly through the circuitry:
• Magnets
• Speakers
• Motors
• Steel or ferrous metal shields
• Batteries
• Surface-mount electronic components containing the ferrous metal nickel: leave a
couple od millimeters space between the nickel bearing components and the
compass
16
AMS Application RtM 07/06/2013

PCB Design [2/2] High Current Wiring Effect on Compass
• High currents in wiring and printed circuit traces can be culprits in
causing errors in magnetic field measurements for compassing.
• The magnetic sensors can not discern between Earth’s magnetic
field and adjacent.
• Conductor generated magnetic fields will add to Earth’s magnetic field
making errors in compass heading computation.
• Keep currents higher than 10 mili-amperes a few millimeters further
away from the sensor IC.
17
AMS Application RtM 07/06/2013

Embedded Software 18
Accelerometer Calibration
Magnetometer Calibration
E-compass Application: Heading computation
Testing the MEMS Compass: Verification of the calibration
AMS Application RtM 07/06/2013

Accelerometer Calibration [1/2]
• All ST MEMS accelerometers are factory calibrated – it is sufficient
for most of the applications
• To reach a heading accuracy of below 2 , an easy calibration
procedure is hereafter described.
• After the LSM303x is installed on PCB inside a device, it is
necessary to calibrate the accelerometer part again by device's
manufacturers in order to determine the offset, the scale factor,
and the misalignment matrix with respect to the device body axes
Xb/Yb/Zb.
• After the device is released to the market, end users don't need to
perform further accelerometer calibration in field.
19
AMS Application RtM 07/06/2013

Accelerometer Calibration [2/2]
• Relationship between the normalized Ax1, Ay1, and Az1 and the accelerometer raw measurements Ax, Ay, and Az:
• where [A_m] is a 3x3 misalignment matrix between the accelerometer sensing axes and the device body axes; A_SCi (i = x, y, z) is the scale factor and A_OSi is the offset
• The goal of the accelerometer calibration is to determine the12 ACCxx parameters.
• The calibration can be performed at 6 stationary positions:
20
AMS Application RtM 07/06/2013

Magnetometer Calibration Needs
• All ST magnetometers are calibrated in ST fab.
• If no ferrous object are on the PCB and other SMT devices are sufficiently distant from the magnetometer, no calibration is necessary. This is not the case usually!
• If ferrous object are close to the magnetometer an Hard-Iron calibration is necessary (rotation on the flat plane).
• If SMT devices are close to magnetometer an Soft-Iron calibration is necessary (pitch, roll and yaw rotations).
• Definition of terms
• Hard-Iron magnetic materials – ferromagnetic materials with permanent magnetic fields (e.g. magnets, speakers). They are time invariant.
• Soft-Iron magnetic materials – the items (e.g. current carrying traces on the PCB, steel shields, batteries or other magnetically soft materials) which can become magnetized and produce time varying magnetic field.
21
AMS Application RtM 07/06/2013

Magnetometer Calibration [1/4]
• The relationship between the normalized Mx1, My1, and Mz1 and the magnetic sensor raw measurements Mx, My, and Mz can be expressed as
• where [M_m] is a 3x3 misalignment matrix between the magnetic sensor sensing axes and the device body axes; M_SCi (i = x, y, z) is the scale factor and M_OSi is the offset caused by hard-iron distortion; [M_si] is a 3x3 matrix caused by soft-iron distortion.
• The goal of the magnetic sensor calibration is to determine the MRxx parameters.
• There are 3 steps for magnetic sensor calibration.
22
AMS Application RtM 07/06/2013

Magnetometer Calibration [2/4] Step 1: Soft-iron effect verification
• It is always good to know if the device has soft-iron interference
before choosing which model for the identification of the
calibration parameters, tilted ellipsoid, or non-tilted ellipsoid. This can
be done by performing 3D rotations in a clean environmental area.
• An amount of 3D rotations data can be used for rough field calibration.
23
AMS Application RtM 07/06/2013

Magnetometer Calibration [3/4] Step 2: Hard-iron, soft-iron and scale factor
compensation • If there is soft-iron distortion, the 3D rotations show a tilt ellipsoid which can be
described as the following equation:
• where: x0, y0, z0 are the offsets M_OSi (i = x, y, z) caused by hard-iron distortion; x, y, z are magnetic sensor raw data Mx, My and Mz; a, b, c are the semi-axes lengths; d, e, f are cross axis effect to make the ellipsoid tilted; R is a constant of the Earth’s magnetic field strength. Least square method based algorithm.
• If there is no soft-iron distortion inside the device, or the soft-iron effect is very small and can be ignored, then the ellipsoid from 3D rotations is not tilted. So the soft-iron matrix [M_si] is a 3x3 identity matrix and equation above can be simplified as:
24
AMS Application RtM
After soft-iron, hard-iron and scale compensations
07/06/2013
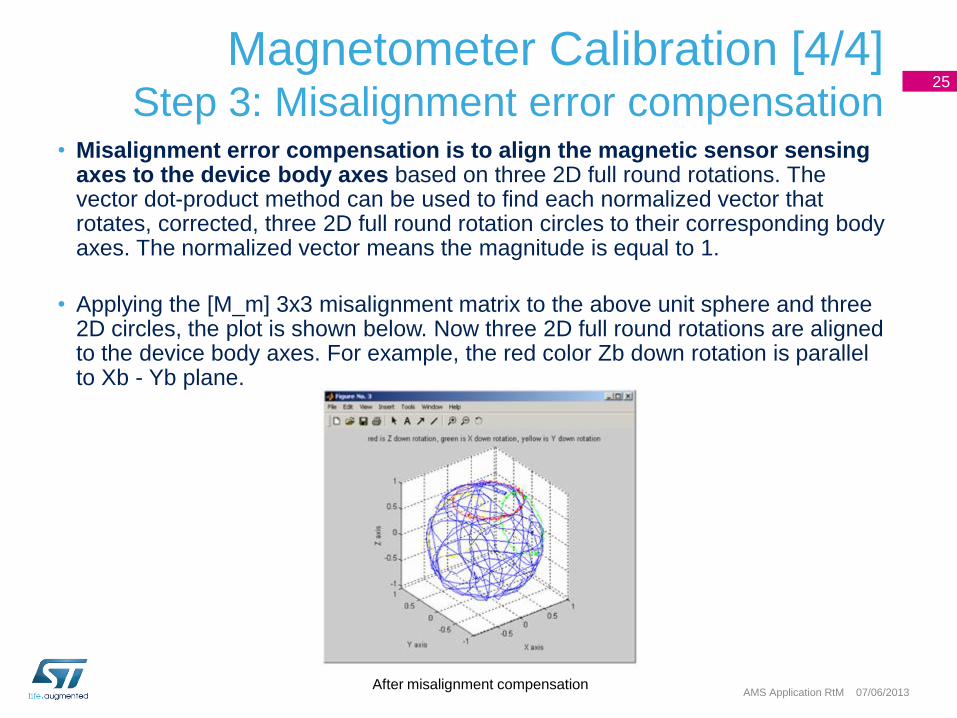
Magnetometer Calibration [4/4] Step 3: Misalignment error compensation
• Misalignment error compensation is to align the magnetic sensor sensing axes to the device body axes based on three 2D full round rotations. The vector dot-product method can be used to find each normalized vector that rotates, corrected, three 2D full round rotation circles to their corresponding body axes. The normalized vector means the magnitude is equal to 1.
• Applying the [M_m] 3x3 misalignment matrix to the above unit sphere and three 2D circles, the plot is shown below. Now three 2D full round rotations are aligned to the device body axes. For example, the red color Zb down rotation is parallel to Xb - Yb plane.
25
AMS Application RtM After misalignment compensation
07/06/2013

E-Compass Application - Heading computation
For the heading calculation, 3-axis magnetic sensor measurements need to be
normalized by applying magnetic sensor calibration parameters and then reflected
onto the horizontal plane by tilt compensation:
26
AMS Application RtM
where Mx1, My1, and Mz1 are the normalized magnetic sensor
measurements after applying calibration parameters
where Ax1, Ay1, and Az1 are the normalized values after applying
accelerometer calibration parameters into Ax, Ay, and Az raw data
07/06/2013

Testing the MEMS Compass
• After the calibration parameters for the accelerometer and the
magnetic sensor of the LSM303D have been determined, it is
necessary to check the performance of the electronic compass.
This could be carried out with accurate lab testing and rough field
testing.
27
AMS Application RtM
Lab testing • Convenient setup for accurate lab testing is a
wooden platform with 3 degrees of rotation freedom.
• Rotate the wooden platform horizontally clockwise
or counterclockwise at a random angle which can be
read from the marks on the platform.
• Then compare the compass heading output with the
known heading angle.
Field testing • In any physical situations outside the lab, rough field
testing can be performed.
• A wooden table with a smooth surface is required.
The surface does not have to be leveled.
• Draw some lines, for example, 20º apart on a white
sheet of paper as shown.
• Align the left edge of the device to any line.
• Record the compass heading output value.
07/06/2013

Documentation & Support Tools 28
Datasheet, Application / Design Notes & Tips
Evaluation Boards
PC Graphical User Interface
Technical Support
AMS Application RtM 07/06/2013

ST E-compass SW Libraries • ST has different SW solutions for tilt compensation and Magnetometer
calibration for e-compass
29
Version Features Required
Documentation
Tilt
Compensation
Library
• Needs Accel + Magnetometer data Evaluation Agreement -
LUA
Basic Calibration
Library
• Needs only Magnetometer data
• Very light at the computational point of view
Evaluation Agreement -
LUA
iNEMO Engine
Calibration Lite
• Needs only Magnetometer data
• Needs less computation power
• Calculates HI and SI corrections
• It supports two functional mode:
1. Always on calibration (Background Calibration)
2. Triggered Calibration
Evaluation Agreement -
LUA
iNEMO Engine
Calibration
(PRO version)
• Needs complete 9-axis data to Sensor Fusion
• Has better performances but needs more resources
• Uses Kalman filter theory to determine Offsets and “Gains”
• Supports two functional mode:
1. Always on Calibration (Background Calibration)
2. Triggered Calibration
Evaluation Agreement -
LUA
End User Certificate -
EUC
AMS Application RtM 07/06/2013

Documentation
• ST Compasses Product Website
• Application Note AN3192 for tilt-
compensated compass implementation
• Technical Note TN0018 on PCB design
and package surface mounting
30
AMS Application RtM 07/06/2013

Evaluation boards Daughter boards available:
STEVAL-MKI109V2
STM32-based MEMS motherboard
compatible with ST MEMS adapters
LSM303D
STEVAL-MKI133V1
31
LSM303DLHC
STEVAL-MKI106V1
Note: Schematics and Gerber files are available
under evaluation boards webpages in internet
AMS Application RtM
• Firmware upgrades are possible via DFU
• Source codes available including low
level drivers for STM32
07/06/2013
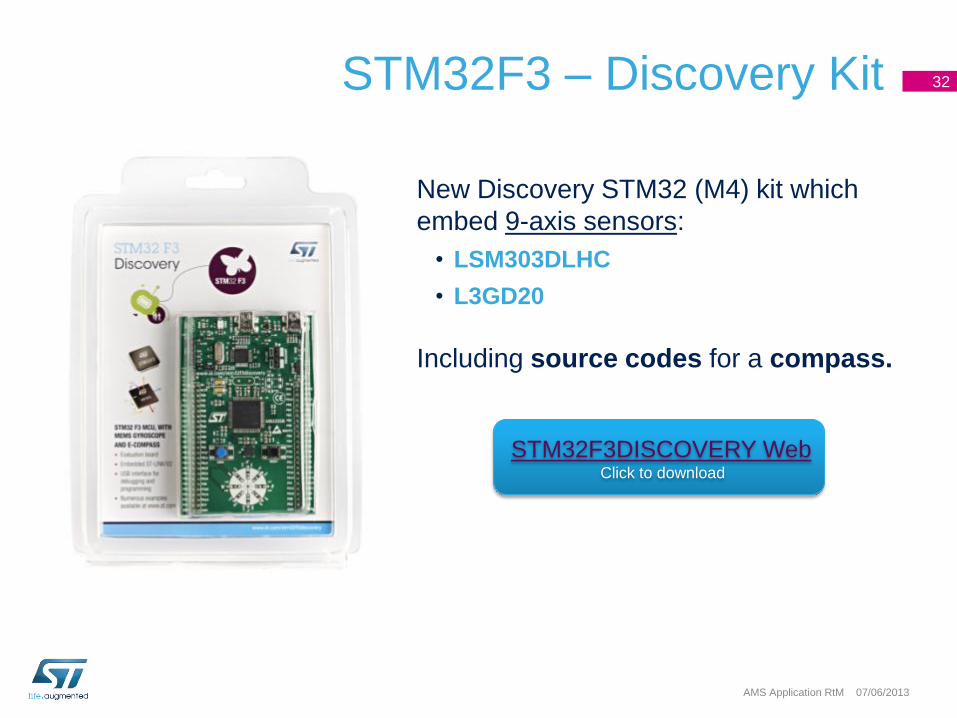
STM32F3 – Discovery Kit 32
• New Discovery STM32 (M4) kit which
embed 9-axis sensors:
• LSM303DLHC
• L3GD20
• Including source codes for a compass.
AMS Application RtM
STM32F3DISCOVERY Web Click to download
07/06/2013
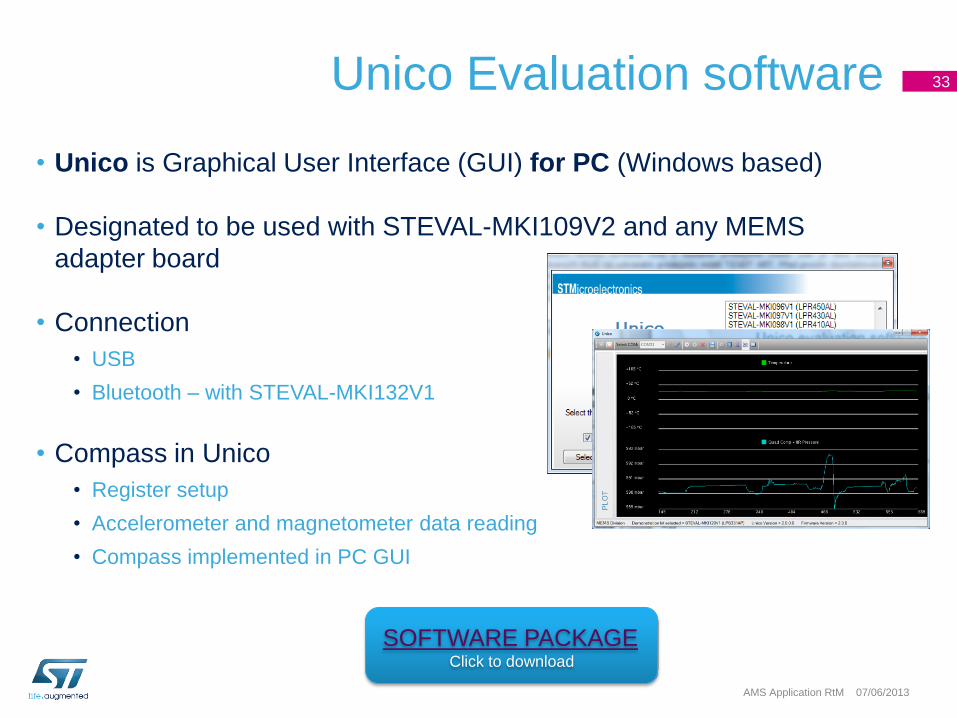
Unico Evaluation software
• Unico is Graphical User Interface (GUI) for PC (Windows based)
• Designated to be used with STEVAL-MKI109V2 and any MEMS
adapter board
• Connection
• USB
• Bluetooth – with STEVAL-MKI132V1
• Compass in Unico
• Register setup
• Accelerometer and magnetometer data reading
• Compass implemented in PC GUI
33
AMS Application RtM
SOFTWARE PACKAGE Click to download
07/06/2013

Analog, MEMS & Sensors (AMS)
Application Support Team
… and RF IPD/IPAD RF Baluns
… is providing technical application
support for customers, designing in ST
Analog, MEMS & Sensors products, in
projects agreed with local EMEA ST
sales office / Technical marketing team
• Solving
• Product and Application problems –
answering detailed technical questions
• Providing
• Design consulting (Schematic, PCB and
Software)
• Technical Trainings
Contact email: [email protected]
Application Support Service Card
Application Support Team Focus
AMS Application RtM 07/06/2013