antoine girard val-ams project meeting april 2007 behavioral metrics for simulation-based circuit...
TRANSCRIPT

Antoine Girard
VAL-AMS Project MeetingApril 2007
Behavioral Metrics forSimulation-based Circuit Validation

Time Domain Properties of Circuits
Use Linear or MetricTemporal Logic
• Transient dynamics analysis:
• Desired performance characteristics:1. Maximum overshoot2. Rise time3. Delay time 4. Settling time5. Constraints on input/states6. Response sensitivity

Time Domain Properties of Circuits
System:
Step input (t > 0):
Steady state at t = 0-:
Property:
from Zhi Han’s PhD Thesis 2005

Computer Aided Techniques forCircuit Validation
• Model based validation of time domain properties of circuits and systems:- Specifications: Temporal Logic Formula.- For a set of possible initial states, inputs and parameters.
• Testing:- Simulate a (large) number of trajectories.- Does each trajectory satisfies the specification ?- No validation proof: notion of coverage.
• Reachability based verification:- Compute the (infinite) set of all possible trajectories.- Does each trajectory satisfies the specification ?- Formal proof.
• Intermediate approach:- Can we build a formal proof from a finite number of trajectories ?
Verification using Simulation
• Following the approach presented in:
Fainekos, Girard and Pappas, Temporal logic verification using simulation, FORMATS 2006.
• Behavioral metrics: reachable set covering
Can I compute a finite number of trajectories y1,…,yN and parameters e1,…,eN such that
• Quantitative interpretation of temporal logic formula: robustness degree [](y)
How much can I perturb the trajectory y and the property remains true / false ?
• Circuit validation:
ii eyyNiy
,,...,1,
TrueyyeyNi ii )(,)(,,...,1
Outline of the Talk
• Behavioral metrics.
• Quantitative interpretation of temporal logics
• Algorithms for circuits validation.

Behavioral Metrics
ky
S),(
),(1
kkk
kkkk
xgy
,uxfx
.Uu
RI, y, xRx
kk
pk
nk
,,0
ku
k
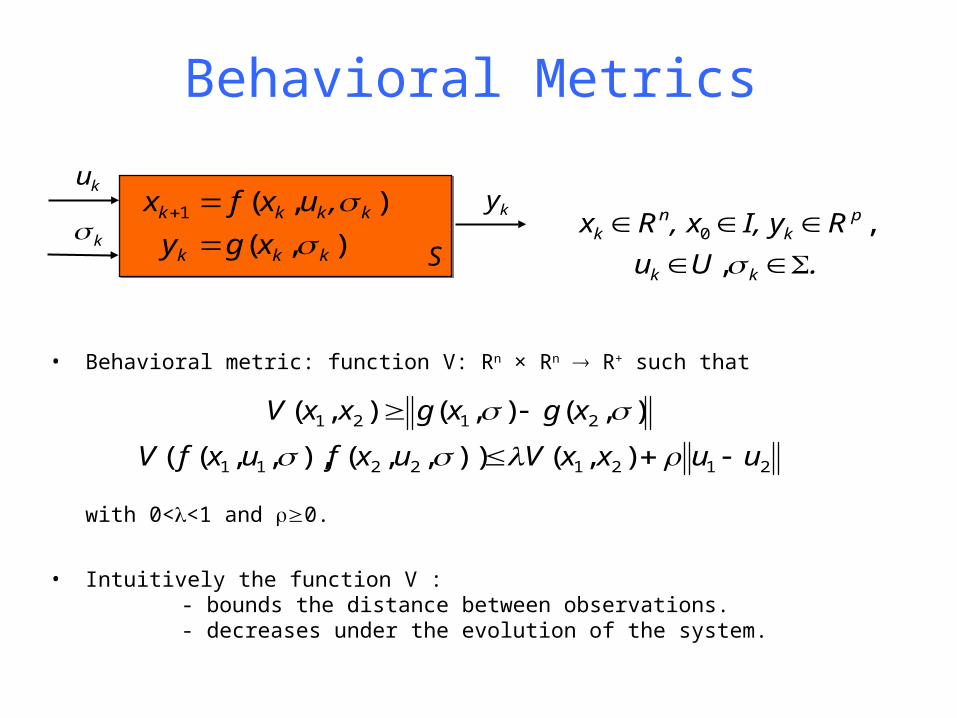
• Discrete time dynamical system with continuous/discrete inputs.
• Distance between trajectories starting from neighbour states, for neighbour sequences of inputs, remains small.
• Notion of behavioral metrics a.k.a.- Contraction metrics (Slotine)- - ISS Lyapunov functions (Angeli)- Bisimulation functions (Girard & Pappas)
Behavioral Metrics
ky
S),(
),(1
kkk
kkkk
xgy
,uxfx
.Uu
RI, y, xRx
kk
pk
nk
,,0
ku
k
• Behavioral metric: function V: Rn × Rn R+ such that
with 0<<1 and 0.
• Intuitively the function V :- bounds the distance between observations.- decreases under the evolution of the system.
21212211
2121
),()),,(),,,((
),(),(),(
uuxxVuxfuxfV
xgxgxxV
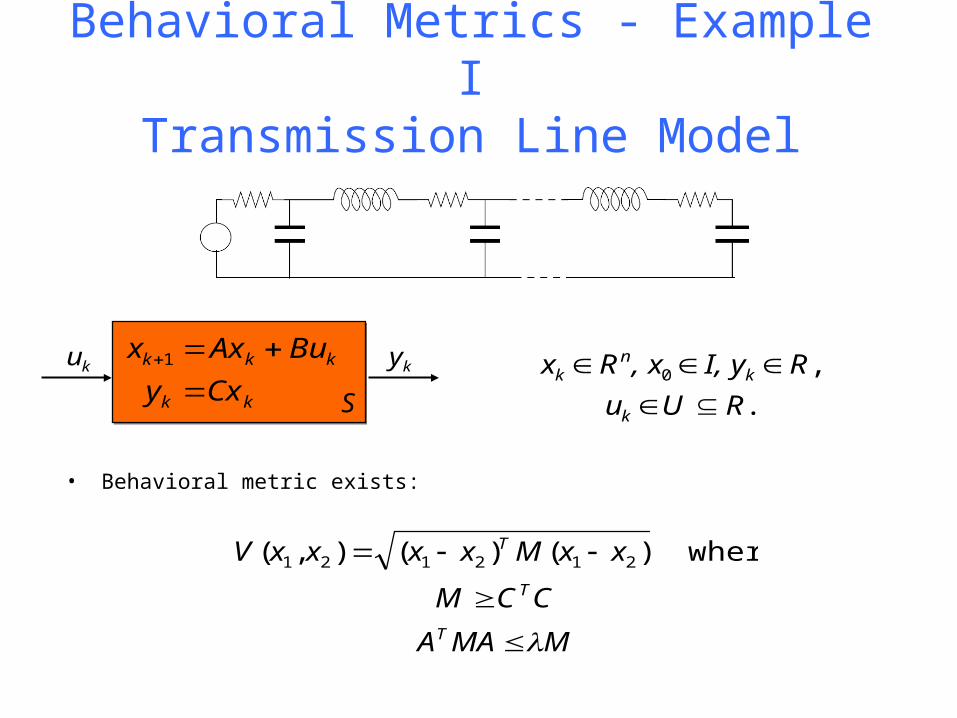
Behavioral Metrics - Example ITransmission Line Model
ky
Skk
kkk
Cxy
BuAxx
1
.
,0
RUu
RI, y, xRx
k
kn
k
ku
• Behavioral metric exists:
MMAA
CCM
xxMxxxxV
T
T
T
where)()(),( 212121

ky
Skk
kk
xCy
BxAx
k
kk
1
2,1
,02
k
kk RI, y, xRx
k
• Behavioral metric exists:
MMAACCM
MMAACCM
xxMxxxxV
TT
TT
T
2222
1111
212121 )()(),(
and
and
where
Behavioral Metrics - Example IIBoost DC/DC Converter
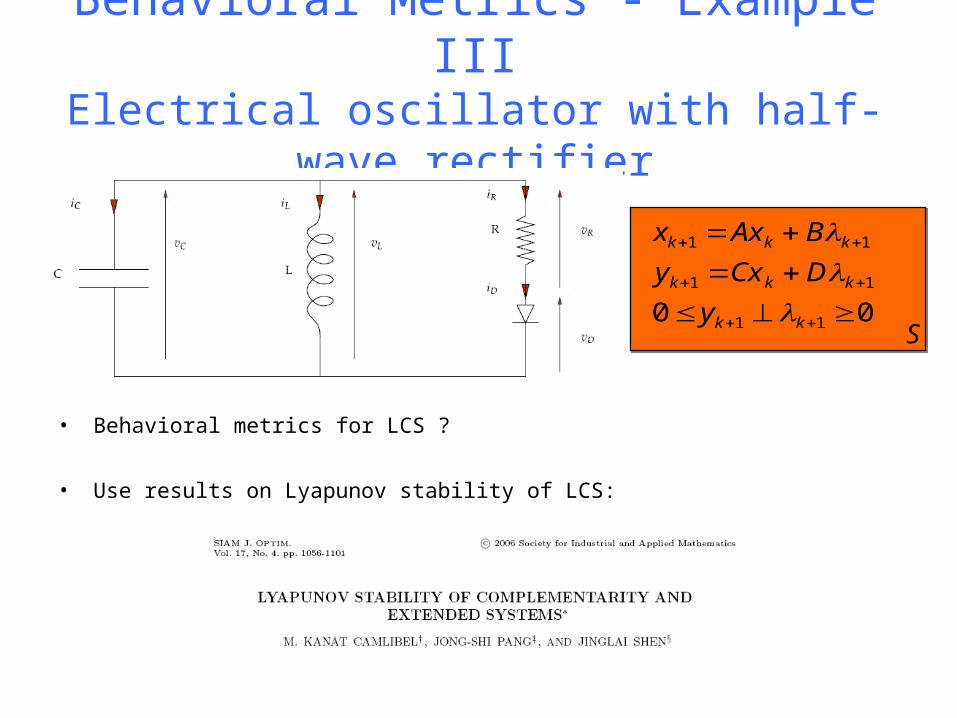
Behavioral Metrics - Example IIIElectrical oscillator with half-wave rectifier
• Behavioral metrics for LCS ?
• Use results on Lyapunov stability of LCS:
00 11
11
11
kk
kkk
kkk
y
DCxy
BAxx
S
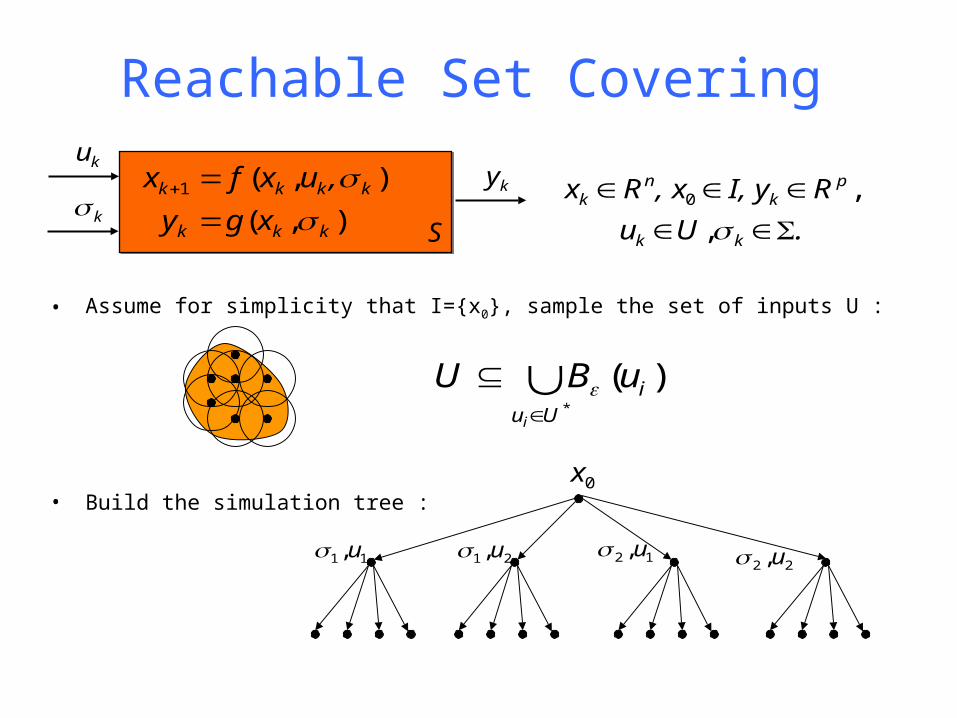
Reachable Set Covering
ky
S),(
),(1
kkk
kkkk
xgy
,uxfx
.Uu
RI, y, xRx
kk
pk
nk
,,0
ku
k
• Assume for simplicity that I={x0}, sample the set of inputs U :
• Build the simulation tree :
*
)(Uu
i
i
uBU
0x
11,u 21,u 12 ,u22 ,u
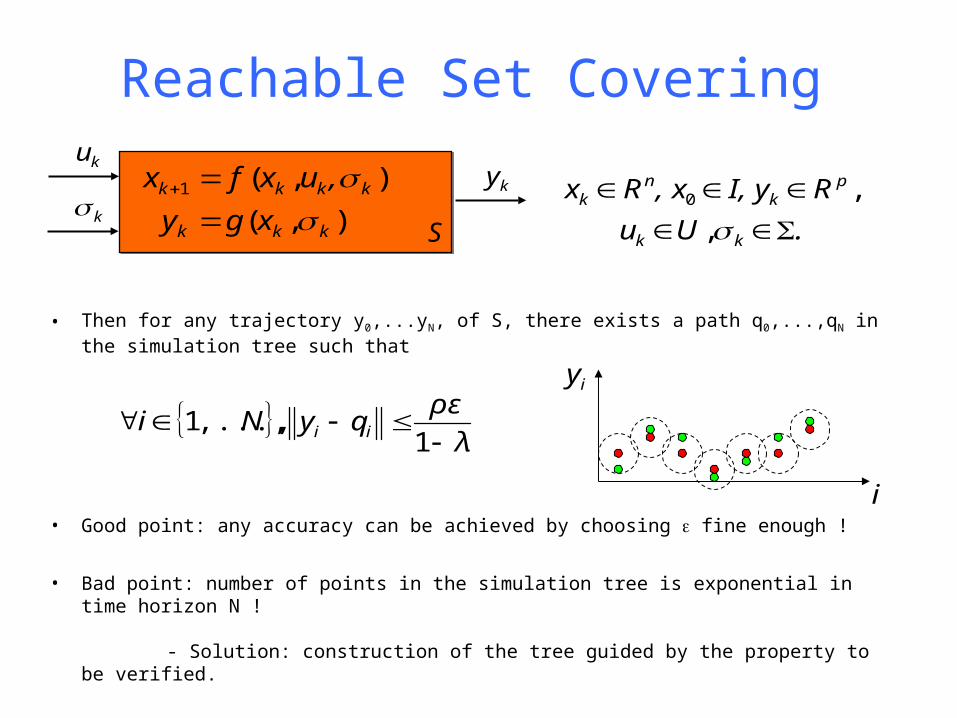
Reachable Set Covering
ky
S),(
),(1
kkk
kkkk
xgy
,uxfx
.Uu
RI, y, xRx
kk
pk
nk
,,0
ku
k
• Then for any trajectory y0,...yN, of S, there exists a path q0,...,qN in the simulation tree such that
• Good point: any accuracy can be achieved by choosing fine enough !
• Bad point: number of points in the simulation tree is exponential in time horizon N !
- Solution: construction of the tree guided by the property to be verified.
λ
ρεqyNi ii
1
,,...,1
i
iy
Outline of the Talk
• Behavioral metrics.
• Quantitative interpretation of temporal logics
• Algorithms for circuits validation.

U uBuAx x'x' x with
Metric Temporal Logic (MTL)
I can be of any bounded or unbounded interval of N.i.e. I = [0,+), I = [2,9]
• Syntax:
• Boolean Semantics:
Fainekos, Pappas: Robustness of Temporal Logic Specifications, 2006

But the Boolean truth value is not enough …
MTL Spec:
((x-10) 2(x10))
MTL Spec:
((x-10) 2(x10))
Fainekos, Pappas: Robustness of Temporal Logic Specifications, 2006
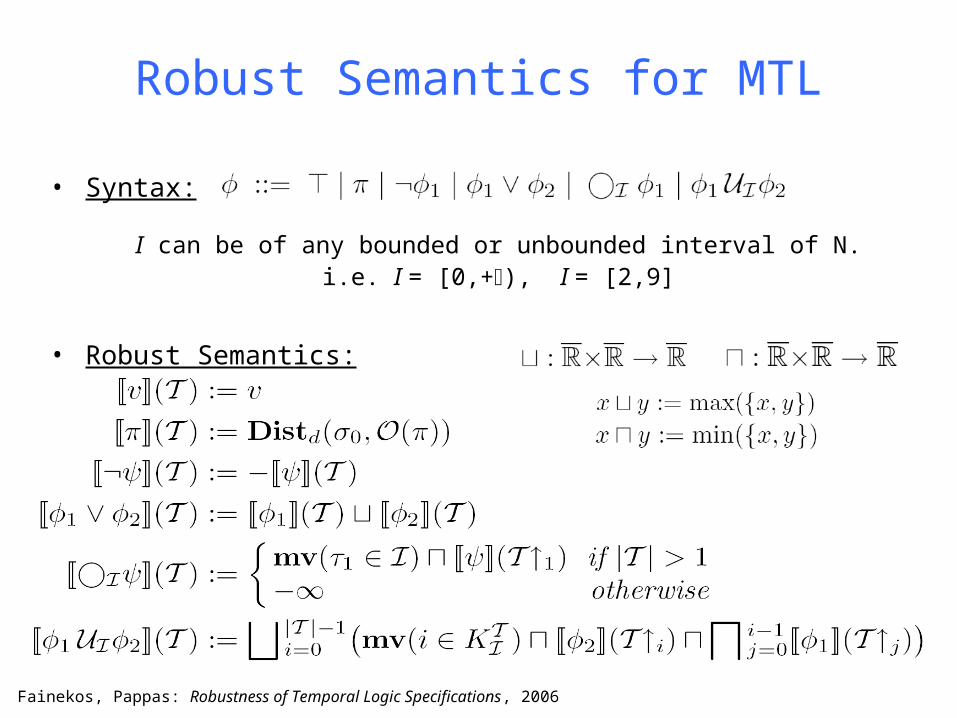
• Syntax:
• Robust Semantics:
Robust Semantics for MTL
I can be of any bounded or unbounded interval of N.i.e. I = [0,+), I = [2,9]
Fainekos, Pappas: Robustness of Temporal Logic Specifications, 2006

Robust and Boolean Semantics for MTL
Proposition: Let Φ be an MTL formula and T be a signal, then
Theorem: Let Φ be an MTL formula and T be a signal, then
N
Fainekos, Pappas: Robustness of Temporal Logic Specifications, 2006

Outline of the Talk
• Behavioral metrics.
• Quantitative interpretation of temporal logics
• Algorithms for circuits validation.
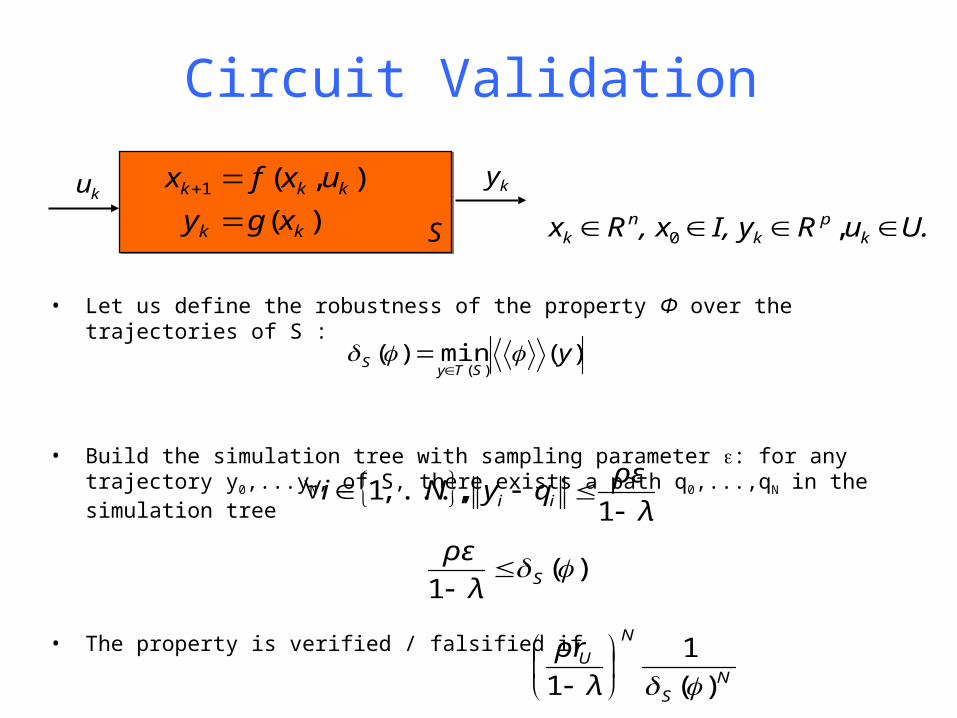
Circuit Validation
ky
S)(
),(1
kk
kkk
xgy
uxfx
U.uRI, y, xRx kp
kn
k ,0
ku
• Let us define the robustness of the property Φ over the trajectories of S :
• Build the simulation tree with sampling parameter : for any trajectory y0,...yN, of S, there exists a path q0,...,qN in the simulation tree
• The property is verified / falsified if
• The number of nodes in the simulation tree is
)(min)()(
ySTy
S
λ
ρεqyNi ii
1
,,...,1
)(1
Sλ
ρε
NS
N
U
λ
ρr
)(
1
1

• The previous algorithm allows to sample uniformly the reachable set
• When interested in property verification, we can adapt locally the sampling to increase efficiency.
• e.g. for safety property:- use coarse sampling when far from the unsafe set- use fine sampling when near the unsafe set
• This multiresolution sampling of the reachable set is obtained by the procedure:
- start with a coarse simulation graph- refine adaptively in regions where it is needed
Property guided Simulation

• Multiresolution simulation graph :
),( 11
00q
),( 11
22q
),( 223 3
q),( 222 2
q
),( 11
11 q
),( 113 3
q
iii
NNN
μ-qy
),μ,(q),,μ(qT(S), ,y,y
that such graph simulation the in
000
Property guided Simulation

• Mark the unsafe states :
),( 11
00q
),( 11
22q
),( 223 3
q),( 222 2
q
),( 11
11 q
),( 113 3
q
Uμ,qN 13
13Π
Uμ,qN 23
23Π Uμ,qN 2
222Π
Uμ,qN 12
12Π
Uμ,qN 10
10Π Uμ,qN 1
111Π
graph simulation the refine to need Otherwise
unsafe, is then , If TUq 12
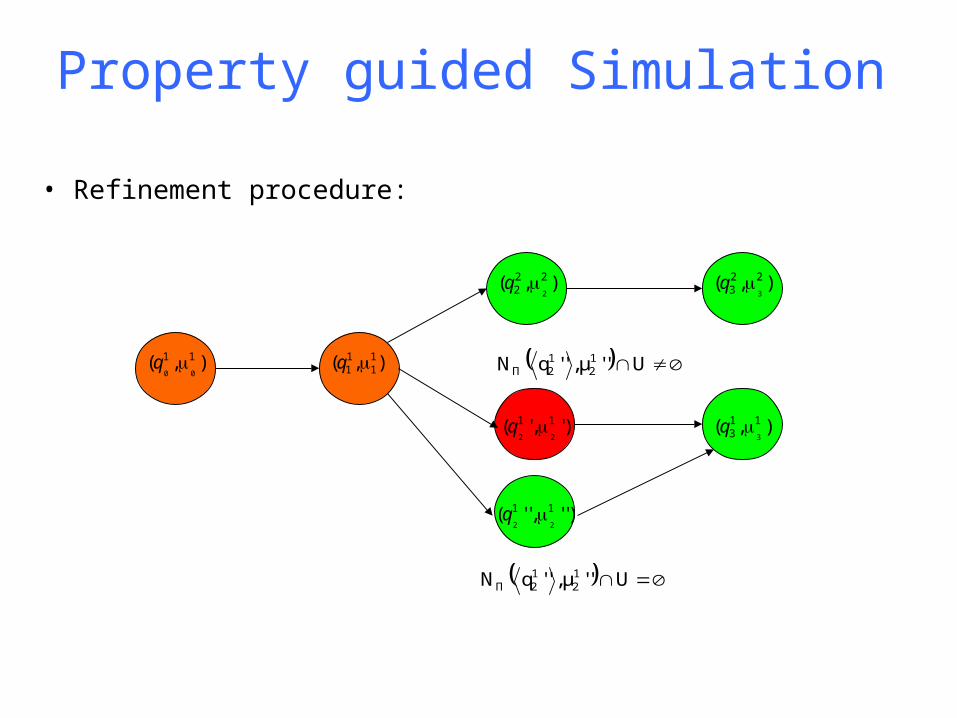
Property guided Simulation

• Refinement procedure:
),( 11
00q
)','( 11
22q
),( 223 3
q),( 222 2
q
),( 11
11 q
),( 113 3
q
)'',''( 11
22q
12
12
12
12 μ'μμ''μ and with
Property guided Simulation
),( 11
00q
)','( 11
22q
),( 223 3
q),( 222 2
q
),( 11
11 q
),( 113 3
q
)'',''( 11
22q
Uμ,qN 12
12Π ''''
Uμ,qN 12
12Π ''''
• Refinement procedure:
Property guided Simulation

),( 11
00q
)','( 11
22q
),( 223 3
q),( 222 2
q
)','( 11
11 q
),( 113 3
q
)'',''( 11
22q
)'',''( 11
11 q
)''','''( 11
22q
• Refinement procedure:
Property guided Simulation

),( 11
00q
)','( 11
22q
),( 223 3
q),( 222 2
q
)','( 11
11 q
),( 113 3
q
)'',''( 11
22q
)'',''( 11
11 q
)''','''( 11
22q
• until you can conclude.
Property guided Simulation

Three-dimensional linear system:
Example
Unsafe = {x2 -7.4} Unsafe = {x2 -7}
Unsafe = {x2 -6.2} Unsafe = {x2 -5.8}
• Verification of infinite state systems using simulation
• Based on the notion of behavioral metrics
• Computational cost related to the robustness of the system- the more robust, the easier the computation- for very robust system, verification requires one simulation
• Future work (in VAL-AMS project)- computation of behavioral metrics for LCS- interface with SICONOS- algorithms for computing “smartly” the simulation tree.- deeper analysis of the computational cost.
Conclusions