anfis pd+i based hybrid force/ position control of an industrial
TRANSCRIPT

Abstract—A hybrid force plus position controller based on
adaptive neuro fuzzy inference system proportional derivative +
integral (ANFIS-PD+I), with unspecified robot dynamics has
been proposed for a robot manipulator under constrained
environment. The proposed controller has been employed as a
principal controller to tune up orthodox PID gains throughout
the complete trajectory tracking process. The validity of the
proposed controller has been studied using a 6-Degree of
Freedom (DOF) PUMA robot manipulator. Simulation
outcomes illustrates that the projected force / position controller
adheres to the desired path closer and smoother.
Index Terms—Adaptive neuro fuzzy control, degrees of
freedom, force control, position control, robot manipulator.
I. INTRODUCTION
An industrial robot manipulator employs desirable force
normal to a given surface for following a recommended
motion tangential trajectory most of the time. A Modified
Hybrid Control scheme was presented in [1] which
accomplished an accurate position and force control for a
robot manipulator in joint space by specifying the desired
compliance in Cartesian space. A hybrid neuro fuzzy (NF)
position/force control with vibration suppression was
presented in [2], where an adaptive neuro fuzzy inference
system was applied to estimate the inverse dynamics of the
space robot. The quadratic optimization and sliding-mode
based hybrid position and force control approach for a robot
manipulator was presented in [3] where the optimal feedback
control law was derived to decide matrix differential Riccati
equation and a feed forward neural network was applied to
tackle the dynamic model uncertainties. A neural adaptive
control scheme for hybrid force/position control of rigid robot
manipulators was presented in [4]. Based on decomposed
robot dynamics into force, position and redundant joint
subspaces, a neural controller was proposed to tackle the
parametric uncertainties, present in the dynamical model of
the robot manipulator. A novel neuro-adaptive force/position
tracking controller in touch with a surface influenced with
non-parametric uncertainties was proposed in [5] for a robotic
manipulator The configuration dependent dynamical problem
Manuscript received November 9, 2013; revised January 10, 2014.
Himanshu Chaudhary is with the Department of Electrical Engineering,
IITR, India (e-mail: himan.74@ gmail.com, [email protected]).
Vikas Panwar and Rajendra Prasad are with the School of Vocational
Studies & Applied Sciences, GBU, India (e-mail:[email protected]).
N. Sukavanum is with the Department of Mathematics, IITR, India
(e-mail: [email protected]).
of the manipulator in constrained motion was dealt in [6] with
the implementation of a hybrid force/velocity control for
contour tracking tasks of unknown objects performed by
industrial robot manipulators. An adaptive robust hybrid
position/force control technique based on Lyapunov stability
and bound estimation for a robot manipulator was proposed in
[7]. The controller does not need the information of
uncertainty bound. A position/ force controller based on the
principles of invariancy for dividing of the task space into
force and position subspaces was introduced in [8], to
guarantee the overall stability. A hybrid impedance force /
position control scheme was developed and presented in [9]
for a redundant robot manipulator. The outer-loop controller
improves transient performance, while the inner loop consists
of a Cartesian-level potential difference controller, a
redundancy resolution scheme at the acceleration level, and a
joint-space inverse dynamics controller. A stable as well as
generalized architecture for hybrid position/force control is
presented in [10], which can influence both joint positions
and torques. It was shown that kinematic instability is due to
inverse of the manipulator Jacobian matrix. A robust learning
control algorithm for precise path tracking of constrained
robotic manipulators in the presence of state disturbances,
output measurement noises and errors in initial conditions
was presented in [11]. The reference [12] proposed a hybrid
position, posture, force, and moment control for a
six-degree-of-freedom (6-DOF) robot manipulator for the
surface contact work by expansion of the conventional hybrid
position and force control. The issue of hybrid adaptive
network-based fuzzy inference system (ANFIS) tuning
methodology based force/position control of the robot
manipulators mounted on oscillatory was successfully applied
in [13]. When the system is in sliding mode, force, position,
and redundant joint velocity errors will approach zero
irrespective of parametric uncertainties so a novel
sliding-adaptive controller Based on a decomposition of the
rigid robot system with motor dynamics was developed in
[14], which can achieve robustness to parameter variations in
both manipulator and motor. A hybrid adaptive fuzzy control
approach based position/force control of robot manipulators
is proposed in [15] to solve the overwhelming complexity of
the deburring process and imprecise knowledge about robot
manipulators. A fuzzy neural networks based Position/force
controller to deal efficiently with force disturbances signals
was presented in [16], to search the direction of the constraint
surface for an unknown object. There are many theoretical as
well as practical hurdles which are still unachievable because
of unspecified robot manipulator dynamics as well as
environmental complexities. Standard approaches are
ANFIS PD+I Based Hybrid Force/ Position Control of an
Industrial Robot Manipulator
Himanshu Chaudhary, Vikas Panwar, N. Sukavanam, and Rajendra Prasad
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
107DOI: 10.7763/IJMMM.2014.V2.110

appropriate when one has the precise mathematical modeling
of all the fundamental parameters vital, are available. On the
other hand, most of the time one has to work in real
environment where the dynamic model as well as external
environmental variables are unidentified [17]. Conventional
controllers like PD and PI alone do not perform well in case of
removing steady state error as well as to enhance the transient
response. Recently, some of the hybrid intelligent type fuzzy
proportional integral derivative (FPID) controller techniques
have been combined with conventional techniques and
presented in [18], which illustrates the improved steady state
as well as transient response. A two input fuzzy system (TIFS)
based digital type proportional integral derivative (PID)
controller was presented in [19]. For achieving high
robustness opposed to noise, [20] accumulated twin nonlinear
differentiators with a conventional fuzzy proportional and
derivative (CFPD) controller to develop a different hybrid
fuzzy proportional and derivative (HFPD) controller. To
unravel the nonlinear control snag, [21] integrated the fuzzy
gain scheduling method with a fuzzy proportional, integral
and derivative (FPID) control for industrial robot manipulator.
To eliminates the requirement of precise dynamical models in
Computed Torque Control (CTC) in the presence of
structured/unstructured uncertainty, [22] combined the Fuzzy
Control (FC) concept with CTC to solve the trajectory
control problems of robot manipulators. The reference [23]
presented a Self-Organizing Fuzzy Proportional Derivative
(SOF-PD) control scheme, which exploits the simplicity and
toughness of the plain PD control and enhances its gain, was
offered for robot manipulators. To build and optimize the
fuzzy models [24] proposed a HYFIS( Hybrid neural fuzzy
Inference system), which inculcates the learning capabilities
of neural networks with processing power of fuzzy logic.
while considering the nonlinearities, uncertainties and
external perturbations of an industrial robot manipulator, [25]
proposed some new hybrid ANFIS (Adaptive neuro fuzzy
inference system) control algorithms. The reference [26]
applied ANFIS to address the inverse kinematic problem of
determining a set of joint angles for a specific manipulator
posture, while the robot’s postures and trajectories were
executed in Virtual Reality. An ANFIS based solution was
presented in [27] to replicate the real time performance of an
industrial end effector, So that the controller can facilitate
dissimilar gains with disturbance signals. The reference [28]
used the ANFIS for the designing of a controller based on
inverse kinematic of an industrial robot manipulator.
In the present research paper, a hybrid force/position
control approach is proposed for trajectory control of robot
manipulator, which works well in the absence of anonymous
dynamics of a robot manipulator in a constraint environment.
The constraint has been taken in joint space by restricting the
manipulator to move in Z direction. The proposed
ANFIS-PD+I force/position controller follows the trajectory
exceptionally smoothly with bare minimum error.
Section II establishes the actuator dynamic model for the n
degrees of freedom (DOF) robot manipulator. The hybrid
ANFIS-PD+I force/position controller is discussed in Section
III. Section IV presents simulation outcome to reveal the
efficiency of the proposed controller, followed by conclusions
in Section V.
II. DYNAMICS OF ROBOT MANIPULATOR
The traditional dynamic model of an n DOF robot
manipulator is presumed to be in the subsequent form[29]
( ) ( , ) ( ) ( )mM q q V q q G q F q (1)
where ( ) nxnM q R represents the inertia matrix,
( , ) RnxnmV q q represents the centripetal-coriolis matrix,
( ) RnG q represents the gravity effects, ( ) RnF q denotes
the friction effects, ( ) nt R signifies the torque input
control vector and ( ), ( ), ( ) nq t q t q t R signify link position,
velocity and acceleration correspondingly. If armature
inductance is insignificant in the case of electric motors then
the dynamics of n decoupled armature-controlled DC motors
are
M M M M MJ q Bq F R K v (2)
where nv R is the control input motor voltage,
{ } nM Miq vec q R with Miq is the i
th rotor angle, motor
inertia is MJ , rotor damping constant denoted by MB , MF is
the actuator friction. The actuator coefficient matrices are
constants, specified as
0
0
( / ) 0
0 ( / )
0
0
/ 0
0 /
MiM
Mi
Mi bi Mi ai
Mi bi Mi ai
i
i
Mi aiM
Mi ai
JJ
J
B K K RB
B K K R
rR
r
K RK
K R
(3)
Here aiR is armature resistance, MiK is torque
constant, biK is back emf constant and MiJ is the motor
inertia of the ith
motor. ir is the gear ratio of the coupling
or i i M i
M
q r q
q Rq
(4)
where ir is a constant less then1 if iq is revolute else units of
m/rad if iq is prismatic. By putting Mq from (4) and from
(1), the actuator dynamics for a robot manipulator may be
written as
.. .2 2
2 2
( ) ( )
( )
M M m
M M
J R M q B R V q
RF R F R G RK v
(5)
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
108

or
.. . .
( ) ( , ) ( ) ( )mM q q V q q G q F q K v (6)
where
.2 2
.2 2
( ) ( ); ( , ) ( )
( ) ; ( ) ( );
M m M m
M M
M q J R M V q q B R V
G q R G F q RF R F K RK
(7)
After including nonlinear unmodelled disturbances, the (6)
can be rewritten as [29]
.. . .
( ) ( , ) ( ) ( )m dM q q V q q G q F q K v (8)
.. .
( ) ( , ) dM q q N q q K v (9)
III. HYBRID ANFIS-PD+I FORCE/POSITION CONTROLLER
DESIGN
A hybrid ANFIS - PD+I force/position controller applied
to six DOF PUMA robot arm has been shown in Fig. 1. The
ANFIS controller applied, is having two inputs and single
output (TISO) structure. The inputs used are position error as
well as integral error ( me ), velocity error ( me ). The integral
error ( me ) has been used simply to perform orthodox integral
action.
Fig. 1. ANFIS-PD+I hybrid force/position controller.
A. Force/Position Controller
The dynamic model of an n DOF robot manipulator with
environmental contact on a prescribed surface is presumed to
be in the subsequent form [29]
( ) ( , ) ( )
( ) ( )
m
T
d
M q q V q q G q
F q J q
(10)
where ( ) , ( )nq t R J q a Jacobian matrix is related with the
touching surface, and is contact forces vector applied
normal to the surface. The restricted surface for robot
manipulator is considered in Z direction in joint space. The
Jacobian matrix is
( )Z
J qq
(11)
The constraint equation reduces the number of degree of
freedom to
1n n m (12)
To find the constraint motion along the Z direction the
reduced order dynamics for robot manipulator is
1 1 1 1 1 1
1 1 1
( ) ( ) ( , )
( ) ( ) ( )
m
Td
M q L q q V q q q
F q G q J q
(13)
where 1
1 1( ) , ( )n
q t R L q is an extended Jacobian matrix
given by
1
1
1
( )
nI
L q Z
q
(14)
The reduced order dynamics describing the motion in the
plane of constraint surface is
1 1 1 dMq V q F G (15)
where
1 1 1 1 1 1( ) ; ( , ) ( ( ) ),
; ; ;
T T Tm
T T T Td d
M L M q L V V q q L L V L M q L
F L F G L G L L
As 1 1( ) ( ) 0J q L q (16)
The suppositions and the necessary properties of the model
given in (6) have been utilized in the proposed controller
development are given as
Property 1: The inertia matrix 1( )M q is positive definite
symmetric and bounded above and below.
Property 2: The matrix 1 1 1 1( ( ) - 2 ( , ))M q V q q is skew
symmetric.
Property 3: 1 1( ) F q a b q for some unknown
positive constants a, b.
Property 4: d c for some unknown positive constants
c.
B. ANFIS Architecture
It combines the learning capabilities of neural networks
with processing power of fuzzy logic. [30] proposed and
explained the use of ANFIS for solving a fuzzy inference
system under consideration having two inputs x and y and one
output z, which contains the rule base of two fuzzy if-then
rules as
Rule 1:
1 1 1 1 1 1 , If x is A and y is B then f p x q y r
Rule 2:
2 2 2 2 2 2 , If x is A and y is B then f p x q y r
During the training of the network, the input is propagated
layer by layer in forward direction while the error is
propagated in backward direction. In layer 1, the member ship
function is applied on premise parameters. To show the firing
strength, layer 2 multiplies the incoming signals. Layer 3
calculates the firing strength of the signals received and
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
109
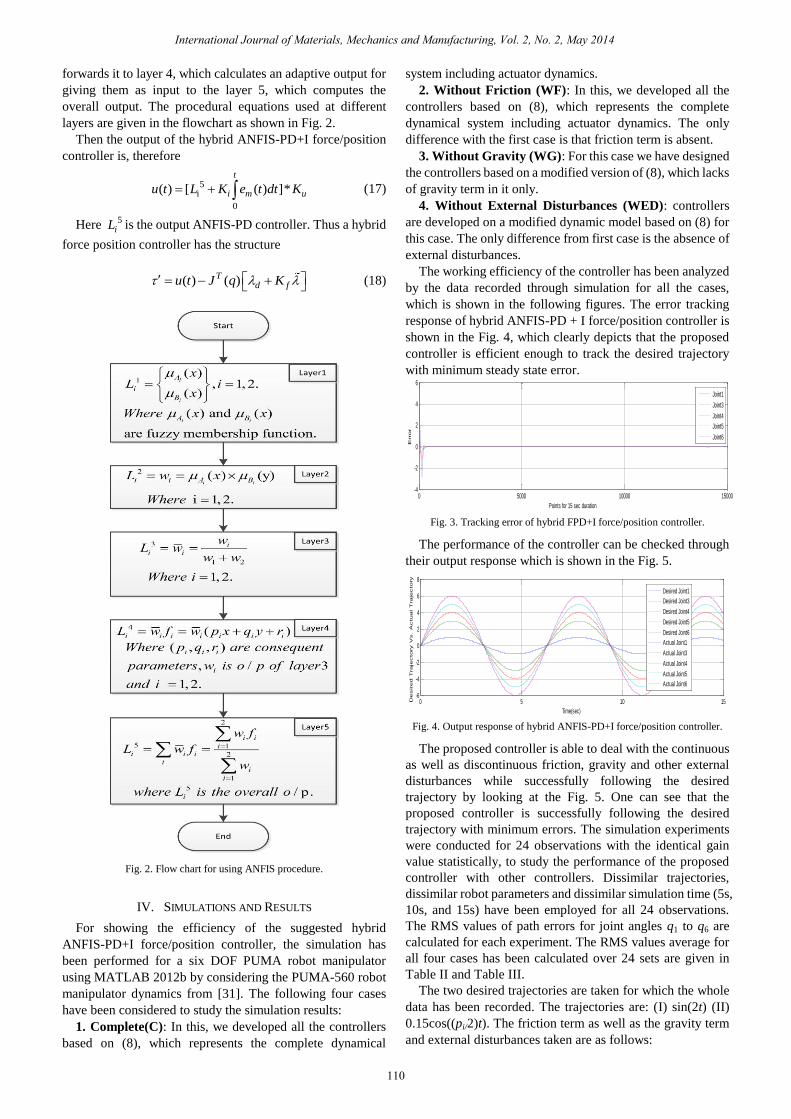
forwards it to layer 4, which calculates an adaptive output for
giving them as input to the layer 5, which computes the
overall output. The procedural equations used at different
layers are given in the flowchart as shown in Fig. 2.
Then the output of the hybrid ANFIS-PD+I force/position
controller is, therefore
5i
0
( ) [ ( ) ]*
t
i m uu t L K e t dt K (17)
Here 5iL is the output ANFIS-PD controller. Thus a hybrid
force position controller has the structure
( ) ( )Td fu t J q K (18)
Fig. 2. Flow chart for using ANFIS procedure.
IV. SIMULATIONS AND RESULTS
For showing the efficiency of the suggested hybrid
ANFIS-PD+I force/position controller, the simulation has
been performed for a six DOF PUMA robot manipulator
using MATLAB 2012b by considering the PUMA-560 robot
manipulator dynamics from [31]. The following four cases
have been considered to study the simulation results:
1. Complete(C): In this, we developed all the controllers
based on (8), which represents the complete dynamical
system including actuator dynamics.
2. Without Friction (WF): In this, we developed all the
controllers based on (8), which represents the complete
dynamical system including actuator dynamics. The only
difference with the first case is that friction term is absent.
3. Without Gravity (WG): For this case we have designed
the controllers based on a modified version of (8), which lacks
of gravity term in it only.
4. Without External Disturbances (WED): controllers
are developed on a modified dynamic model based on (8) for
this case. The only difference from first case is the absence of
external disturbances.
The working efficiency of the controller has been analyzed
by the data recorded through simulation for all the cases,
which is shown in the following figures. The error tracking
response of hybrid ANFIS-PD + I force/position controller is
shown in the Fig. 4, which clearly depicts that the proposed
controller is efficient enough to track the desired trajectory
with minimum steady state error.
0 5000 10000 15000-4
-2
0
2
4
6
Error
Points for 15 sec duration
Joint1
Joint3
Joint4
Joint5
Joint6
Fig. 3. Tracking error of hybrid FPD+I force/position controller.
The performance of the controller can be checked through
their output response which is shown in the Fig. 5.
0 5 10 15-6
-4
-2
0
2
4
6
8
Time(sec)
Desired T
raje
ctory V
s. A
ctual T
raje
ctory
Desired Joint1
Desired Joint3
Desired Joint4
Desired Joint5
Desired Joint6
Actual Joint1
Actual Joint3
Actual Joint4
Actual Joint5
Actual Joint6
Fig. 4. Output response of hybrid ANFIS-PD+I force/position controller.
The proposed controller is able to deal with the continuous
as well as discontinuous friction, gravity and other external
disturbances while successfully following the desired
trajectory by looking at the Fig. 5. One can see that the
proposed controller is successfully following the desired
trajectory with minimum errors. The simulation experiments
were conducted for 24 observations with the identical gain
value statistically, to study the performance of the proposed
controller with other controllers. Dissimilar trajectories,
dissimilar robot parameters and dissimilar simulation time (5s,
10s, and 15s) have been employed for all 24 observations.
The RMS values of path errors for joint angles q1 to q6 are
calculated for each experiment. The RMS values average for
all four cases has been calculated over 24 sets are given in
Table II and Table III.
The two desired trajectories are taken for which the whole
data has been recorded. The trajectories are: (I) sin(2t) (II)
0.15cos((pi/2)t). The friction term as well as the gravity term
and external disturbances taken are as follows:
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
110
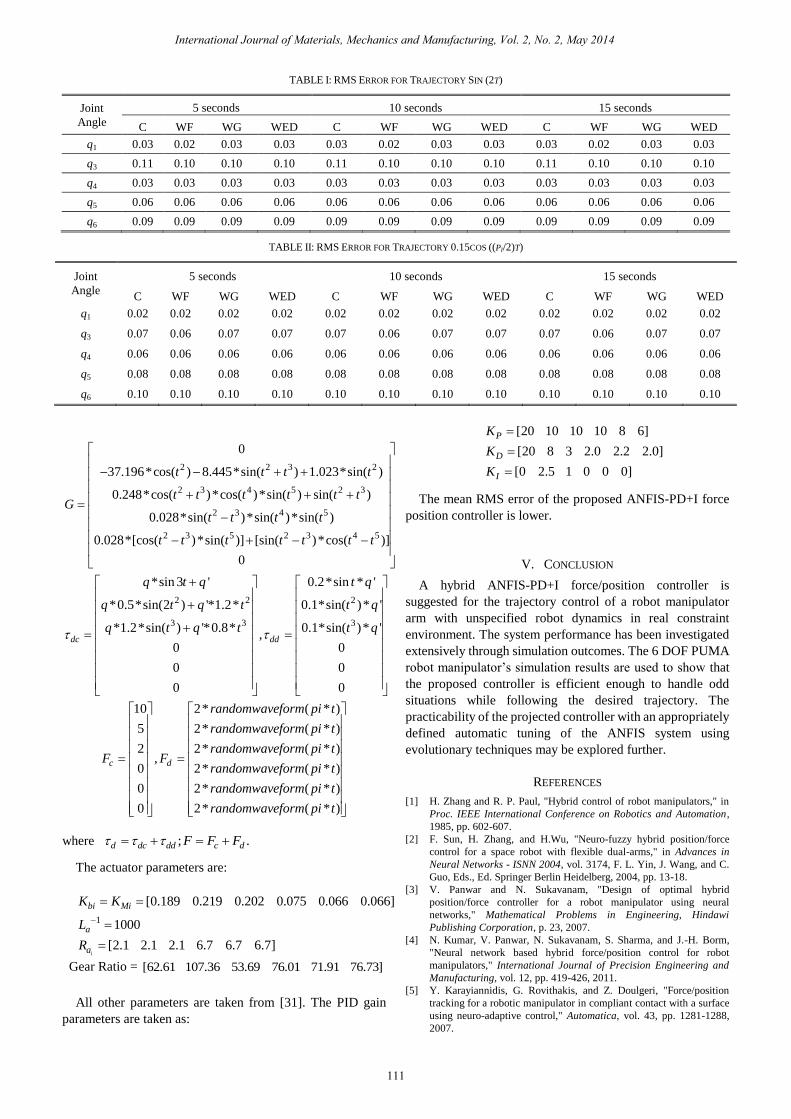
TABLE I: RMS ERROR FOR TRAJECTORY SIN (2T)
Joint
Angle
5 seconds 10 seconds 15 seconds
C WF WG WED C WF WG WED C WF WG WED
q1 0.03 0.02 0.03 0.03 0.03 0.02 0.03 0.03 0.03 0.02 0.03 0.03
q3 0.11 0.10 0.10 0.10 0.11 0.10 0.10 0.10 0.11 0.10 0.10 0.10
q4 0.03 0.03 0.03 0.03 0.03 0.03 0.03 0.03 0.03 0.03 0.03 0.03
q5 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06
q6 0.09 0.09 0.09 0.09 0.09 0.09 0.09 0.09 0.09 0.09 0.09 0.09
TABLE II: RMS ERROR FOR TRAJECTORY 0.15COS ((PI/2)T)
Joint
Angle
5 seconds 10 seconds 15 seconds
C WF WG WED C WF WG WED C WF WG WED
q1 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02
q3 0.07 0.06 0.07 0.07 0.07 0.06 0.07 0.07 0.07 0.06 0.07 0.07
q4 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06 0.06
q5 0.08 0.08 0.08 0.08 0.08 0.08 0.08 0.08 0.08 0.08 0.08 0.08
q6 0.10 0.10 0.10 0.10 0.10 0.10 0.10 0.10 0.10 0.10 0.10 0.10
2 2 3 2
2 3 4 5 2 3
2 3 4 5
2 3 5 2 3 4 5
0
37.196*cos( ) 8.445*sin( ) 1.023*sin( )
0.248*cos( )*cos( )*sin( ) sin( )
0.028*sin( )*sin( )*sin( )
0.028*[cos( )*sin( )] [sin( )*cos( )]
0
t t t t
t t t t t tG
t t t t
t t t t t t t
2 2 2
3 3 3
*sin 3 ' 0.2*sin * '
*0.5*sin(2 ) '*1.2* 0.1*sin( )* '
*1.2*sin( ) '*0.8* 0.1*sin( )* ',
0 0
0 0
0 0
dc dd
q t q t q
q t q t t q
q t q t t q
10 2* ( * )
5 2* ( * )
2 2* ( * ),
0 2* ( * )
0 2* ( * )
0 2* ( * )
c d
randomwaveform pi t
randomwaveform pi t
randomwaveform pi tF F
randomwaveform pi t
randomwaveform pi t
randomwaveform pi t
where ; .d dc dd c dF F F
The actuator parameters are:
1
[0.189 0.219 0.202 0.075 0.066 0.066]
1000
[2.1 2.1 2.1 6.7 6.7 6.7]i
bi Mi
a
a
K K
L
R
Gear Ratio = [62.61 107.36 53.69 76.01 71.91 76.73]
All other parameters are taken from [31]. The PID gain
parameters are taken as:
[20 10 10 10 8 6]
[20 8 3 2.0 2.2 2.0]
[0 2.5 1 0 0 0]
P
D
I
K
K
K
The mean RMS error of the proposed ANFIS-PD+I force
position controller is lower.
V. CONCLUSION
A hybrid ANFIS-PD+I force/position controller is
suggested for the trajectory control of a robot manipulator
arm with unspecified robot dynamics in real constraint
environment. The system performance has been investigated
extensively through simulation outcomes. The 6 DOF PUMA
robot manipulator’s simulation results are used to show that
the proposed controller is efficient enough to handle odd
situations while following the desired trajectory. The
practicability of the projected controller with an appropriately
defined automatic tuning of the ANFIS system using
evolutionary techniques may be explored further.
REFERENCES
[1] H. Zhang and R. P. Paul, "Hybrid control of robot manipulators," in
Proc. IEEE International Conference on Robotics and Automation,
1985, pp. 602-607.
[2] F. Sun, H. Zhang, and H.Wu, "Neuro-fuzzy hybrid position/force
control for a space robot with flexible dual-arms," in Advances in
Neural Networks - ISNN 2004, vol. 3174, F. L. Yin, J. Wang, and C.
Guo, Eds., Ed. Springer Berlin Heidelberg, 2004, pp. 13-18.
[3] V. Panwar and N. Sukavanam, "Design of optimal hybrid
position/force controller for a robot manipulator using neural
networks," Mathematical Problems in Engineering, Hindawi
Publishing Corporation, p. 23, 2007.
[4] N. Kumar, V. Panwar, N. Sukavanam, S. Sharma, and J.-H. Borm,
"Neural network based hybrid force/position control for robot
manipulators," International Journal of Precision Engineering and
Manufacturing, vol. 12, pp. 419-426, 2011.
[5] Y. Karayiannidis, G. Rovithakis, and Z. Doulgeri, "Force/position
tracking for a robotic manipulator in compliant contact with a surface
using neuro-adaptive control," Automatica, vol. 43, pp. 1281-1288,
2007.
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
111

[6] F. Jatta, G. Legnani, A. Visioli, and G. Ziliani, "On the use of velocity
feedback in hybrid force/velocity control of industrial manipulators,"
Control Engineering Practice, vol. 14, pp. 1045-1055, 2006.
[7] I. C. Ha and M. C. Han, "Robust hybrid position/force control with
adaptive scheme," JSME International Journal Series C Mechanical
Systems, Machine Elements and Manufacturing, vol. 47, pp.
1161-1165, 2004.
[8] A. A. Goldenberg and P. Song, "Principles for design of position and
force controllers for robot manipulators," Robotics and Autonomous
Systems, vol. 21, pp. 263-277, 1997.
[9] R. V. Patel, H. A. Talebi, J. Jayender, and F. Shadpey, "A robust
position and force control strategy for 7-DOF Redundant
manipulators," IEEE/ASME Transactions on Mechatronics, vol. 14,
pp. 575-589, 2009.
[10] W. D. Fisher and M. S. Mujtaba, "Hybrid position/force control: a
correct formulation," The International Journal of Robotics Research,
vol. 11, pp. 299-311, 1992.
[11] D. Wang, Y. C. Soh, and C. C. Cheah, "Robust motion and force
control of constrained manipulators by learning," Automatica, vol. 31,
pp. 257-262, 1995.
[12] H. Qingjiu and R. Enomoto, "Hybrid position, posture, force and
moment control of robot manipulators," in Proc. IEEE International
Conference on Robotics and Biomimetics, 2008, 2009, pp. 1444-1450.
[13] J. Lin, C. C. Lin, and H. Lo, "Hybrid position/force control of robot
manipulators mounted on oscillatory bases using adaptive fuzzy
control," in Proc. IEEE International Symposium on Intelligent
Control, 2010, pp. 487-492.
[14] C. M. Kwan, "Hybrid force/position control for manipulators with
motor dynamics using a sliding-adaptive approach," IEEE
Transactions on Automatic Control, vol. 40, pp. 963-968, 1995.
[15] H. Feng-Yi and F. Li-Chen, "Intelligent robot deburring using adaptive
fuzzy hybrid position/force control," IEEE Transactions on Robotics
and Automation, vol. 16, pp. 325-335, 2000.
[16] K. Kiguchi and T. Fukuda, "Position/force control of robot
manipulators for geometrically unknown objects using fuzzy neural
networks," IEEE Transactions on Industrial Electronics, vol. 47, pp.
641-649, 2000.
[17] O. Castillo and P. Melin, "Intelligent adaptive model-based control of
robotic dynamic systems with a hybrid fuzzy-neural approach,"
Applied Soft Computing, Elsevier, vol. 3, pp. 363-378, 2003.
[18] G. M. Khoury, M. Saad, H. Y. Kanaan, and C. Asmar, "Fuzzy PID
Control of a Five DOF Robot Arm," Journal of Intelligent and Robotic
Systems, Springer, vol. 40, pp. 299-320, 2004.
[19] W. Li, X. G. Chang, J. Farrell, and F. M. Wahl, "Design of an enhanced
hybrid fuzzy P+ID controller for a mechanical manipulator," IEEE
Transactions on Systems, Man, and Cybernetics, vol. 31, pp. 938-945,
2001.
[20] Y. X. Su, S. X. Yang, D. Sun, and B. Y. Duan, "A simple hybrid fuzzy
PD controller," Mechatronics, vol. 14, pp. 877-890, 2004.
[21] S. Ya Lei and E. Meng Joo, "Hybrid fuzzy control of robotics systems,"
IEEE Transactions on Fuzzy Systems, vol. 12, pp. 755-765, 2004.
[22] Z. Song, J. Yi, D. Zhao, and X. Li, "A computed torque controller for
uncertain robotic manipulator systems: Fuzzy approach," Fuzzy Sets
Systems, Elsevier, vol. 154, pp. 208-226, 2005.
[23] F. Salas, M. Llama, and V. Santibanez, "A stable self-organizing Fuzzy
PD control for robot manipulators," International Journal of
Innovative Computing, Information and Control, vol. 9, 2013.
[24] J. Kim and N. Kasabov, "HyFIS: adaptive neuro-fuzzy inference
systems and their application to nonlinear dynamical systems," Neural
Networks, vol. 12, pp. 1301-1319, 1999.
[25] S. Alavandar and M. J. Nigam, "New hybrid adaptive neuro-fuzzy
algorithms for manipulator control with uncertainties–Comparative
study," ISA Transactions, vol. 48, pp. 497-502, 2009.
[26] Y. I. A. Mashhadany, "ANFIS-Inverse-Controlled PUMA 560
Workspace Robot with Spherical Wrist," Procedia Engineering, vol.
41, pp. 700-709, 2012.
[27] M. P. F. Queen, M. S. Kumar, and P. B. Aurtherson, "ANFIS technique
applied to the control of a robot manipulator with disturbances,"
Procedia Engineering, vol. 38, pp. 1984-1993, 2012.
[28] C. Himanshu and P. Rajendra, "Intelligent inverse kinematic control of
SCORBOT-ER VPlus robot manipulator," International Journal of
Advances in Engineering & Technology, vol. 1, pp. 158-169, 2011.
[29] F. L. Lewis, S. Jagannathan, and A. Yesildirek, Neural Network
Control of Robot Manipulators and Non-Linear Systems, 1st ed. UK:
Taylor & Francis, 1999.
[30] J. S. R. Jang, "ANFIS: adaptive-network-based fuzzy inference
system," IEEE Transactions on Systems, Man and Cybernetics, vol. 23,
pp. 665-685, 1993.
[31] B. Armstrong, O. Khatib, and J. Burdick, "The explicit dynamic model
and inertial parameters of the PUMA 560 arm," in Proc. IEEE Int.
Conf. on Robotics and Automation, 1986, pp. 510-518.
Himanshu Chaudhary received his B.E. in
electronics and telecommunication from Amravati
University, Amravati, India in 1996, M.E. in
automatic controls and robotics from M.S. University,
Baroda, Gujarat, India in 2000. Presently he is a
research scholar in Electrical Engineering Department,
IIT Roorkee, India. His area of interest includes
industrial robotics, computer networks and embedded
systems.
Viaks Panwar received B.Sc. (mathematics) degree
from Meerut University, India in 1998. He received
M.Sc. and Ph.D. degree in mathematics from the IIT
Roorkee, India in 2000 and 2008 respectively. He also
served as an assistant professor (July 31 2004 – 9
March 2010) at Chaudhary Devi Lal University Sirsa,
Haryana. He also worked as an assistant professor
(March 10 2010 – 16 August 2010) at Defence
Institute of Advanced Technology, (Deemed
University) Pune, Maharashtra. Presently he is working as an assistant
professor from 18 August 2010 at Gautam Buddha University, Greater
Noida, Uttar Pradesh.
N. Sukavanum was born in India in 1957. He received
B.Sc. (Maths) degree from University of Madras, India
in 1977 and M.Sc. (Maths) from the same university in
1979 and Ph.D. (Maths) from IISC Banglore, India in
1985 respectively. He has served as a scientist-B in
Naval Science and Technological Laboratory, DRDO,
Vizag, and as a research scientist in I I T, Bombay. He
also worked as a lecturer at Birla Institute of
Technology and Science, Pilani, Rajasthan from 1990
to 1996. He worked as an assistant professor in Mathematics Department at
Indian Institute of Technology, Roorkee during May 1996–April 2004.
Presently, he is a professor in the Department of Mathematics, Indian
Institute of Technology Roorkee, Roorkee (India). He has published 60
papers in various journals/conferences. He has guided nine Ph.D’s, and
presently six Ph. D’s are under progress. His research interests include
nonlinear analysis, control theory and robotics and control.
Rajendra Prasad received B.Sc. (Hons.) degree from
Meerut University, India in 1973. He received B.E.,
M.E. and Ph.D. degree in electrical engineering from
the University of Roorkee, India in 1977, 1979 and
1990 respectively.. He also served as an assistant
engineer in Madhya Pradesh Electricity Board
(MPEB) from 1979- 1983. Currently, he is a professor
in the Department of Electrical Engineering, Indian
Institute of Technology Roorkee, Roorkee (India). He
has more than 32 years of experience of teaching as well as industry. He has
published 176 papers in various journals/conferences and received eight
awards on his publications in various national/international
journals/conferences proceeding papers. He has guided Seven PhD’s, and
presently six PhD’s are under progress. His research interests include
control, optimization, system engineering and model order reduction of large
scale systems and industrial robotics.
International Journal of Materials, Mechanics and Manufacturing, Vol. 2, No. 2, May 2014
112