analysis of multifingered hands
DESCRIPTION
Analysis of Multifingered Hands. Kerr and Roth 1986. Outline. 1. contribution of this paper 1.1 Selection of Internal Grasp Forces 1.2 Manipulating Objects within the Hand 1.3 Hand Workspaces 2. limitation of this paper 3. future direction of this paper. - PowerPoint PPT PresentationTRANSCRIPT

Analysis of Multifingered HandsKerr and Roth 1986
Outline1. contribution of this paper
1.1 Selection of Internal Grasp Forces
1.2 Manipulating Objects within the Hand
1.3 Hand Workspaces
2. limitation of this paper
3. future direction of this paper
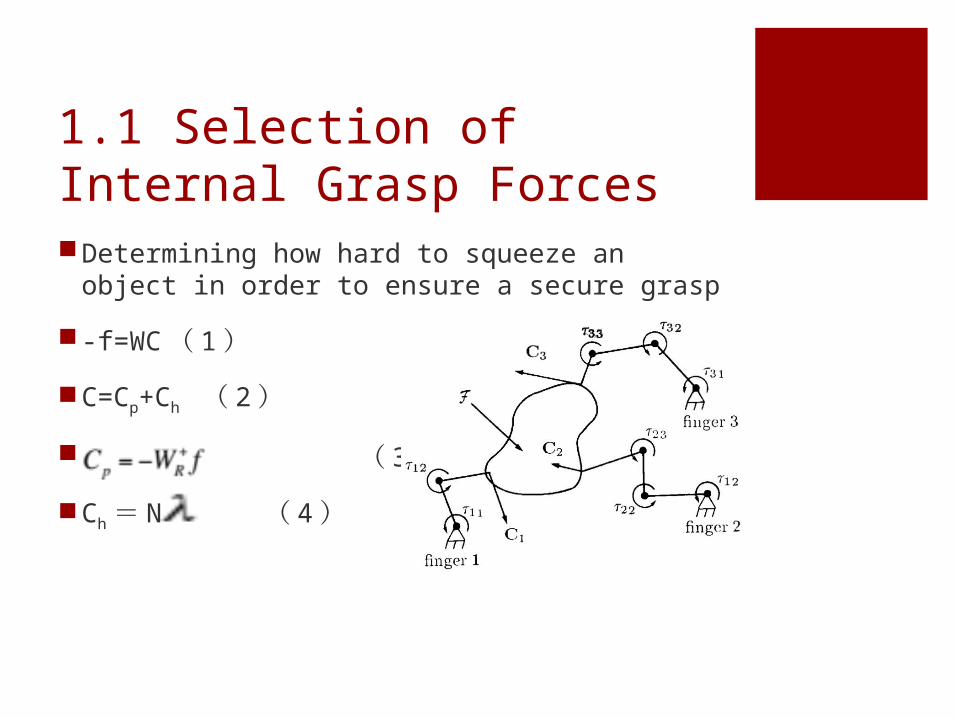
1.1 Selection of Internal Grasp ForcesDetermining how hard to squeeze an object in
order to ensure a secure grasp
-f=WC ( 1 )
C=Cp+Ch ( 2 )
( 3 )
Ch = N ( 4 )
1.1 Selection of Internal Grasp Forces Determining how hard to squeeze an object in order
to ensure a secure grasp
Equation 1 shows that all forces must be balanced
Then we consider friction at the contact points
the friction cannot exceed the maximum available force due to friction, determined by the coefficient of static friction at each point
and the tangential components of the friction must balance out the contact forces so that the object does not move
Then we set up 2nd~8th equations
1.1 Selection of Internal Grasp ForcesFriction constraints
For each contact,we have the constraint (5)
We must also ensure that the tangential components of the contact forces do not exceed the magnitude of the equilibrating friction force. Using a Coulomb friction model,this constraint is written as (6)
1.1 Selection of Internal Grasp Forces If we choose to use four planes, the linear
approximation to equation 6 is written as the set of equations
similarly for torsional friction...
( 7 ) (8)
1.1 Selection of Internal Grasp Forces joint torque limits
we also know the max torque that each finger can exert… so the other constraints are that this max torque cannot be exceeded and min torque is required.
(9)
1.1 Selection of Internal Grasp ForcesThrough a series of computation and
substituting
(10)
(11)
1.1 Selection of Internal Grasp ForcesOptimal selection of internal grasp force
An optimal selection of is one for which we are furthest from violating any one of the constraints.the distance of some point from the plane formed by the ith constraint of equation is given by (12)
reformulating the formula to pose this problem as a standard linear optimization problem ,we get (13)
1.1 Selection of Internal Grasp ForcesThese inequalities are written in more
conventional form if we create a vector which is the vector augmented with the distance variable, d. Equation 13 then becomes
(14)
the function we wish to maximize (15)
Equations 14 and 15 form a linear programming problem in its standard form, which is readily solved by the Simplex method.
1.2. Manipulating Objects within the Handdetermining the motion of each finger joint
required to achieve a desired motion of the object.
The motion of the contact point on each fingertip is identical to the motion of the corresponding contact position on the object.If the inverse kinematic solution for each finger is known, the required finger-joint motions are easily calculated.
1.2. Manipulating Objects within the HandHere,we will consider only the case of pure
rolling between the object and the fingertip.
In the meantime We will consider the minimum case of fingers with three joints.
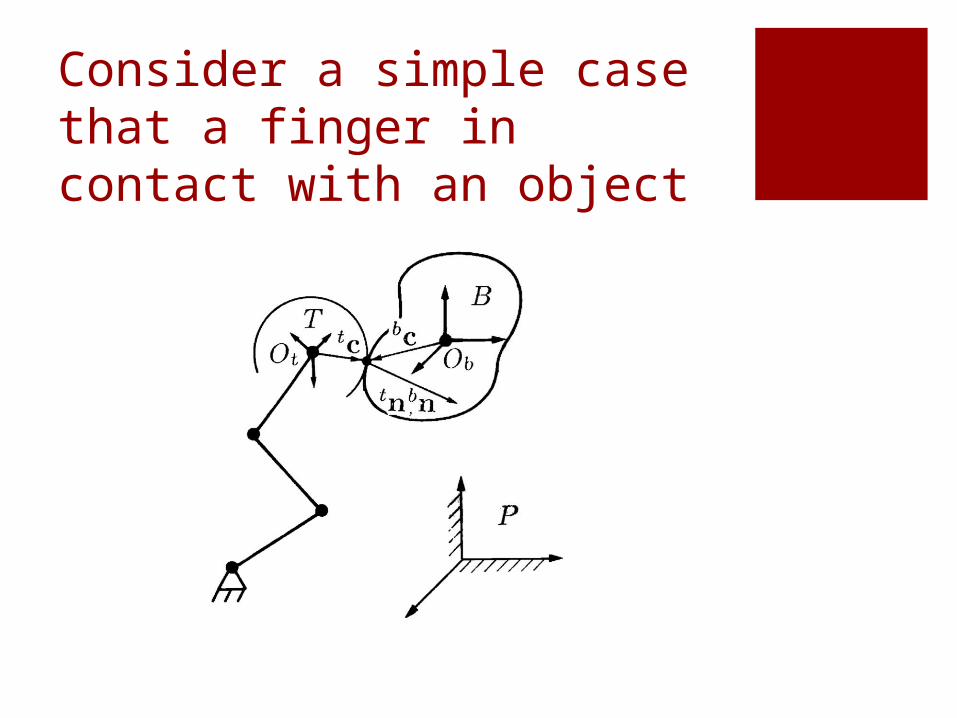
Consider a simple case that a finger in contact with an object
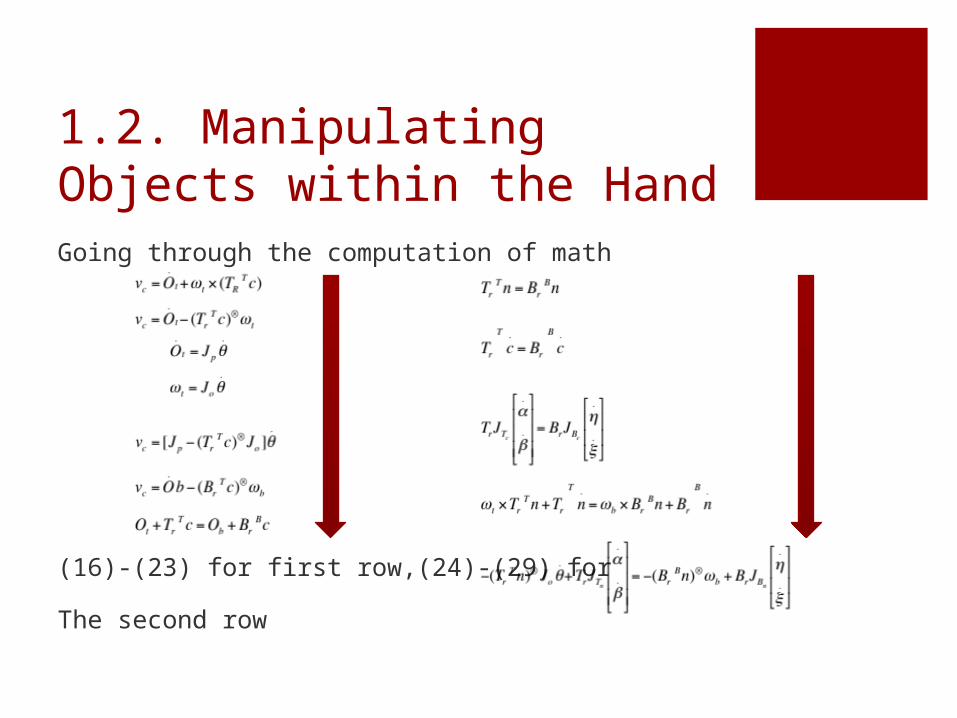
1.2. Manipulating Objects within the HandGoing through the computation of math
(16)-(23) for first row,(24)-(29) for
The second row
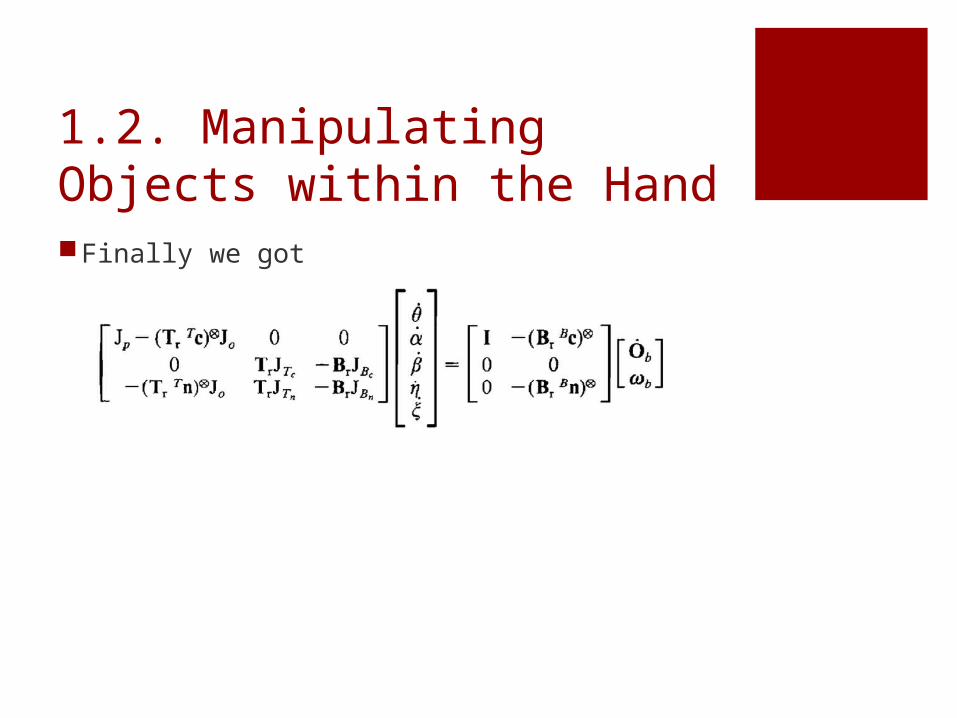
1.2. Manipulating Objects within the HandFinally we got
1.3. Hand Workspaces4 assumptions:
The type of contact present between the fingertips and the object is considered to be point contact with friction,and the contact points do not change during the motion.
The hand workspace will be defined for a particular configuration of contact points on the object and for particular locations of the contact points on the fingertips.
1.3. Hand WorkspacesThe workspace for each fingertip5 is known
and is considered fixed relative to the palm of the hand.
Collisions or intersections between the object and the finger links or between the finger links them- selves will be ignored.
with these four assumptions, determining the workspace for a hand can be reduced to the problem illustrated in figure 6 for a three-fingered hand.
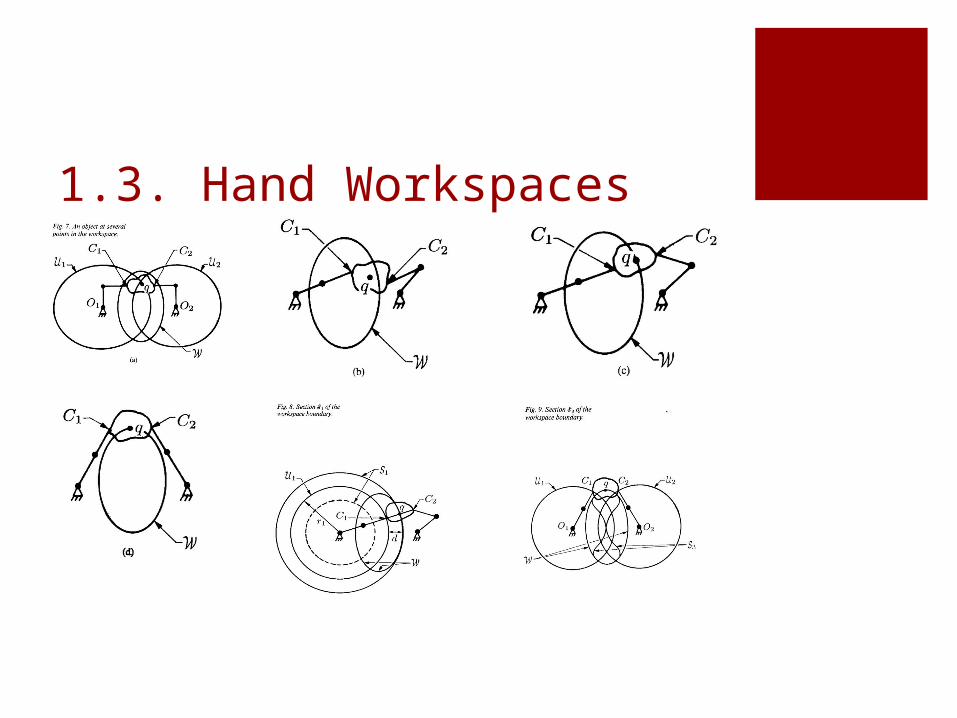
1.3. Hand Workspaces
1.3. Hand WorkspacesRather than deal with the complete six-
dimensional configuration space of the object, we will define the total workspace of the hand as the volume swept out by one particular point q fixed in the object as the object is moved through all possible configurations. For our purposes, we will choose q to be the spatial center of the contact points on the object.
2. Limitations of this paperAssumptions
1. for selection of internal grasp force, the paper assume there are only friction constraint and joint torque constraint.
2. for manipulating objects within the hand, the paper,Here,we will consider only the case of pure rolling between the object and the fingertip.
3. for hand workspaces, all the four assumptions are too restrictive for practical purposes.
3. Future Direction of this paper 1.Adding other types of constraints,to make a real
case
2. for hand workspaces,the treatment of this problem here has not ad- dressed many of the important issues relating to the workspace. The first of these is the range of orientations possible at each point in the total workspace.
3. the analysis here assumes that the contact points are fixed on both the fingertips and the object.
4. The last important point not addressed above is that of intersection between the object and the fingers and between the fingers themselves.
3. Future Direction of this paperThere is no discussion about the influence of
the size and shape on manipulation. And it’s important.
there is no discussion about how to decide a particular configuration and orientation of the end-effector to pick an object from many different possible configurations and orientations
In the meantime,The issue of singular configurations had not been covered.

Thank YOU!