an integrated modelling environment using the metamodel
TRANSCRIPT
An Integrated Modelling Environment Using the Metamodel
Hiroyuki Yoshikawa (I), Tetsuo Tomiyama, Takashi Kiriyarna, Yasushi Urneda Received on January 14,1994
Summary: One of the central issues of intelligent CAD is building a modeling mechanism that deals with multiple models. The basis on which a model is built. which we call ontology. may vary over domains of modeling, abstraction and approximation levels. and granularities. This paper discusses integration of design object models over multiple ontologies. The key idea is the use of meta-level model about relationships among models. The meta-level model. which we call the metarnodel. i s used for reasoning a b u t how models should be generated and modified so that consistency among them can be maintained. The use of the metamodel is illustrated by an example of modeling a hydrofoil.
Keywords: computer aided design. modelling, knowledge based system
1 Introduction One of the central research issues of intelligent CAD i9] is the developnient of a nianagenient system that integrates design object models of varioiis ,wpects. Such a systeni should farilitate generating analytical models froni the user- built conceptual model of the design object, and should niaintain integrity of the generated models to reflect modification by their user of niodels.
In iinplementing an inf.slligent CAD system that incorporates various ex- ternal iiiodelers (e.g., a geometric modeler, and FEM analysis program, etc.). flexibility is also crucial. The systein should easily acconiniodate new niod- elers and be expanded withont reconfiguring its eiitire inodeling mechanism. In other words, modelers must be pluggable into the entire iiiodeling environ- ment. Models in different modelers are related to each other by relationships such as causality, abstraction, approximation, aud aggregation. To maintain these relationships without losing the flexibility of the system, knowledge about relationships unong aspect models should be explicitly inipleniented in the model nianagenient systeni, uid the knowledge used for reasoniiig about the relationships aniong niodels must be described independently of the modelers. The representation of the relationships among aspect niodels is a meta-level model of aspect models used by the CAD system.
Behind an aspect model, there is a background theory on which the niodel is built. Integration of niodels reqnires the CAD system to maintain niod- els using the knowledge about dependency aniong their background theo- ries. The central idea of this paper is that the knowledge about relationships aniong background theories is independent of the inipleinentation in a par- ticular modeler. Therefore, aa intelligent CAD system should be based on a coninionly usable knowledge base of engineering niodeling, which rontains inforination about how concepts used by background theories are niutnally related.
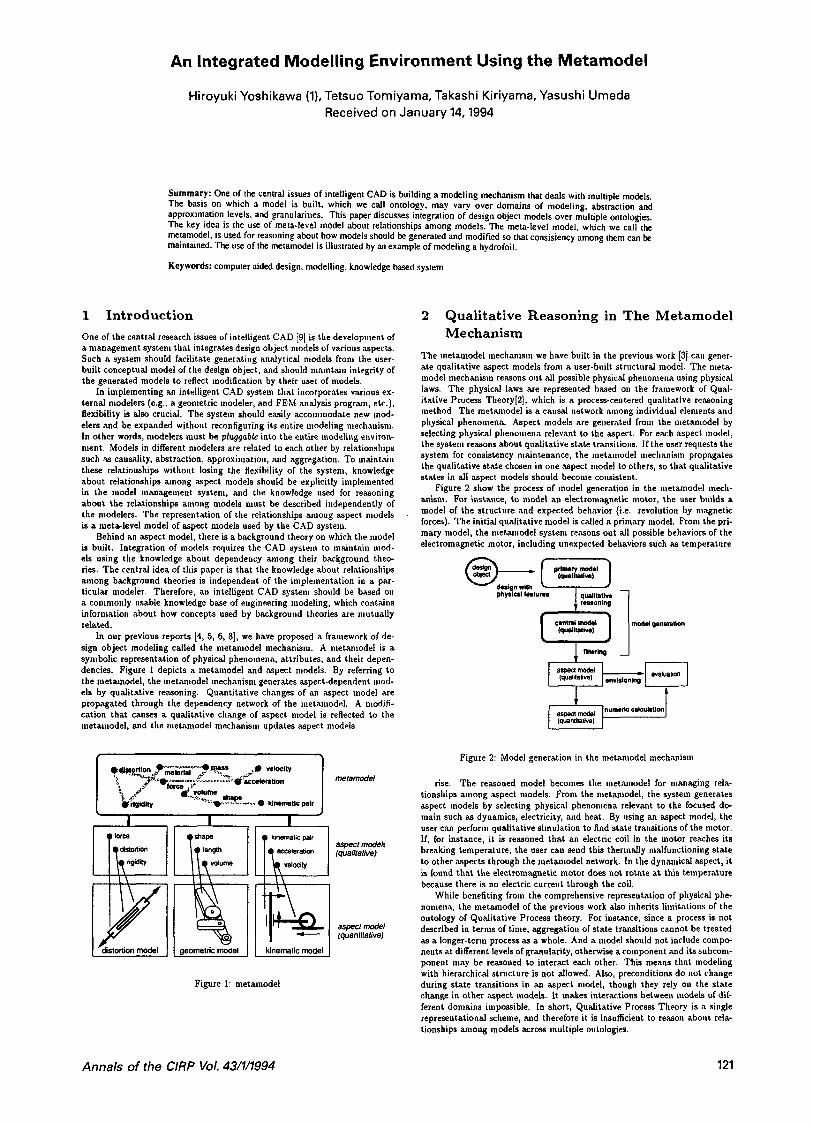
In our previous reports [4, 5, 6, 81, we have proposed a framework of de- sign object modeling called the nietaiiiodel mechanism. A nietaniodel is a symbolic representation of physical phenoinena, attributes, and their depen- dencies. Figure 1 depicts a metaniodel and aspect models. By referring to the inetanodel, the metaniodel mechanisni generates aspect-dependent niod- els by qualitative reasoning. Quantitative changes of an aspect model are propagated through the dependency network of the nietaniodel. A niodifi- cation that causes a qualitative change of aspect niodel is reflected to the nietaniodel, and the nietaniodel mechanism updates aspect niodels.
2 Qualitative Reasoning in The Metamodel Mechanism
The metarnodel inechanisui we have built i n the previous work [3] cau gener- ate qualitative aspect models front a user-built. structural iiiodel The nieta- model mechanism reasons 0111 all possible physical plienonieiia using physical laws. The physical laws are represented based oii the franiework of Qual- itative Process Theory[2], which is a process-rentered qualitative reasoning method. The metaniodel is a causal network aniong individual elenients and physical phenomena. Aspect models are generated froni the iiietaniodel by selecting physical phenomena relevant to the aspect. For each aspect iiiodrl, the systeni reasons about qualitative state transitions. If the user requests the systeni for consistency niaintenance, the nietaniodel niechanisin propagates the qualitative state chosen in one aspect niodel to others, so that qualitative states i n all aspect niodels should beconie consistent.
Figure 2 show the process of niodel generation in the metaniodel mech- anism. For instance, to niodel an electroniagnetic niotor, the user birilds a model of the structure and expected behavior (i.e. revolution by magnetic forces). The initial qualitative iiiodel is called a primary niodel. Froiii the pri- mary niodel, the nietaniodel systeni reasons out all possible behaviors of the electromagnetic motor, including unexpected behaviors such as temperature
1
. ‘ 3 ’ J
metamodel
- (quanfifafive)
1 kinematic model
Figure 1: nietaiiiodel
Figure 2: Model generation in the inetamodel mech<anisiii
rise. The reasoned model becomes the inetainodel for nianagiiig rela- tionships unong aspect niodels. From the metaniodel, the system generates aspect inodels by selecting physical phenoniena relevant to the focused do- main such as dynamics, electricity, and heat. By using an aspect model, the user can perform qualitative siinulation to find state transitions of the niotor. If, for instance, it is reasoned that an electric coil in the motor reaches its breaking temperature, the user can send this thermally malfunctioning state to other asperts through the nietaniodel network. In the dynaniical aspect, it is found that the electromagnetic niotor does not rotate at this temperature because there is no electric current through the coil.
While benefiting froni the comprehensive representation of physical phe- nomena. the nietaiuodel of the previous work also inherits liiiiitatioiis of the ontology of Qualitative Process theory. For instance, since a process is not described in terms of t h e , aggregation of state transitions cannot be treated
a longer-term process as a whole. And a niodel should not inrlude compe nents a t different levels of granularity, otherwise a coniponent and its subconi- ponent niay be reasoned to interact each other. This means that niodeling with hierarchical structure is not allowed. Also, preconditions do not change during state transitions in an aspect model, though they rely on the state change in other aspect models. It makes interactions between ioodels of dif- ferent domains impossible. In short, Qualitative Process Theory is R single representational sclienie, and therefore it is insufficient to reason about rela- tionships among models across inultiple ontologies.
Annals of the ClRP Vol. 43/1/1994 121
In order to make .aspect models pluggable into the nietanicdel, the nieta- model inust be able to represent different ways of niodeling physical phrnoiii- ena and striictitrd roriiyonents.
3 Ontology of the Model
3.1 Dimensions of Ontologies Before discussing the pluggable architecture of the inetamodel, we need to examine how different ontologies can relate to each other. In this chapter, we see dimensions that characterize ontologies.
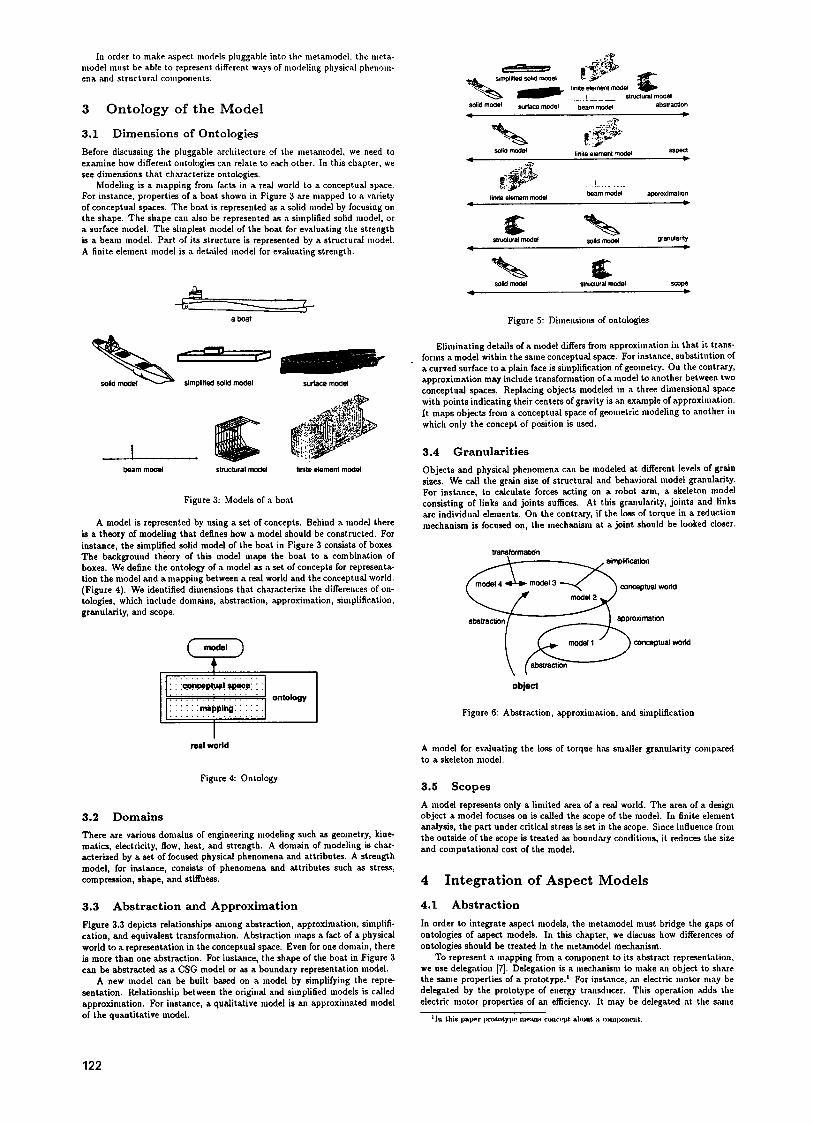
Modeling is a mapping from fcwts in a real world to a conceptual space. For instance, properties of a boat shown in Figure 3 are inapped to a variety of conceptid spaces. The boat is represented as a solid model by focusing 011
the shape. The shape can also be represented as a simplified solid model, or a surface model. The simplest model of the boat for evaluating the strength is a beam model. Part of its structure is represented by a structural model. A finite element model is a detailed model' for evaluating strength.
a boat
I . . ........ beam W approximation - * Ilnila e!smnI model
- Figure 5: Dimensions of ontologies
Eliminating details of a model differs from approximation iii that it trans- forms a model within the same conceptual space. For instance, substitntion of a curved surfewe to a plain face is simplification of geometry. On the contrary, approximation may include transfornlation of a model to another between two conceptual spaces. Replacing objects modeled in a three dinlensional space
F=r=e===a %mpiified solid model surface model
- "r&p with points indicatinn their centers of gravlty is an exalllple of approximatioll -
It maps objects from a conceptual space of geometric modeling to another in which only the concept of position is used.
3.4 Granularities beam mooel stNctural mcdel finite dement model
Figure 3: Models of a boat
A model is represented by using a set of concepts. Behind a model there is a theory of modeling that defines how a model should be constructed. For instance, the simplified solid model of the boat in Figure 3 consists of boxes. The background theory of this model maps the boat to a combination of boxes. We define the ontology of a model as a set of concepts for reyresenta- tion the model and a mapping between a real world and the conceptual world. (Figure 4). We identified dimensions that characterize the differences of on- tologies, which include domaiiis, abstraction, approximation, siiiiplification. granularity, and scope.
f model
. : : : : :mappii: : : : : . . . . . . . . . . . . . . . . . .
teal world
Figure 4 Ontology
3.2 Domains There are various domains of engineering inodeling such as geometry, kine- matics, electricity, flow, heat, and strength. A domain of modeling is char- acterized by a set of focused physical phenomena and attributes. A strength model, for instance, consists of phenomena and attributes such as stress, compression, shape, and stiffness.
3.3 Abstraction and Approximation Figure 3.3 depicts relationships aniong abstraction, approximation, siniplifi- cation, and equivalent transformation. Abstraction maps a fact of a physical world to a representation in the conceptual space. Even for one domain, there is more than one abstraction. For instance, the shape of the boat in Figure 3 can be abstracted as a CSG model or as a boundary representation model.
A new model can be built based on a inodel by simplifying the repre- sentation. Relationship between the original and simplified niodels is called approximation. For instance, a qualitative inodel is an approxilimted model of the quantitative model.
Objects and physical phenomena can be modeled at different levels of grain sizes. We call the grain size of structural and behavioral model granularity. For instance, to calculate forces acting on a robot arm, a skeleton model consisting of links and joints suffices. At this granularity, joints and links are individual elements. On the contrary, if the loss of torque in a reduction mechanism is focused on, the mechanism at a joint should be looked closer.
object
Figure 6: Abstraction, approximation, and simplification
A model for evaluating the loss of torque has smaller granularity compared to a skeleton model.
3.5 Scopes A model represents only a limited area of a real world. The area of a design object a inodel focuses on is called the scope of the model. In finite eleiuent analysis, the part under critical stress is set in the scope. Since influence froin the outside of the scope is treated as boundary conditioiis, it reduces the size and computational cost of the model.
4 Integration of Aspect Models
4.1 Abstraction In order to integrate aspect models, the metainodel must bridge the gaps of ontologies of aspect models. In this chapter, we discuss how differences of ontologies should be treated in the nietaniodel mechanism.
To represent a mapping froin a component to its abstract representation. we use delegation 171. Delegation is a mechanisn~ to make an object to share the sanie properties of a pr0totype.l For instance, an electric motor may be delegated by the prototype of energy transducer. This operation adds the electric motor properties of an efficiency. It may be delegated at the saine
122

t.inie by other prototypes such as a cylinder. or a niass. By delegiitioii, super class hierarchy ainong prototypes is inheritrd and paraiiirters are inst.antiatrd for the component.
lnipleiiientatioii of delegnrion in the nirtainodel iiierlianisiii is straighLfor- ward. A component Iwa a superclass list froni which it inherits paritmeters such as.
an-electric-motor supers {motor;
Delegating a prototype to a component adds the prototype to the super- class list, such w,
an-electric-motor supers {motor transducer}.
And it dnplicates parameters of the prototype for the coinponent. After all, the component behaves as if it is an instalice of a coninioii subclass of delegating prototypes.
There is a link hrtween such representations. A nietaniodel inay linve more than one coordinate systeiiis as abstractions of a space i n the iiieta- model, which are nssociated to transformation matrices. If transformation is needed, the associated matrix is obtained by referring to the link between two coordinate systems.
mate
Figure 8: Pluggable nietaniodel
expm inspect
boat is modeled by a solid modeler. The geonietric inforniation should be used by a finite elenient mesh generator. To set up a finite eleinent niodel. the metaniodel niechanisni calculates forces working on structural members.
4.2 Approximation A niodel can be approximated in many ways. In strength analysis, for in- stance, an object inay be approxiniated as a beani i n an arbitrary orienta- tion. In the nietnniodel mechanism, the user can decide how to approxiinate a model. The nietamodel represents the correspondences of elements between the two niodels.
4.3 Scope In the metalnodel, the scope of an aspect model is represented as a set of components. In transferring data froni an aspect model to anothrr, the ineta- niodel is used as a reference to identify corresponding coniponents shared by aspect models.
4.4 Granularity In building a nietaniodel froni a coniponent model, the qualitative re<asoner takes into account interactioiis aniong all combinations of physical yhenom- ena. However, a component and its subcouiponrnts should not be combined to justify a physical phenomenon. For instance, an electric niotor can be attracted by a perinanent ni.agnet of anotlier niotor but not by one in its sub structure. Therefore, a qualitative reasoner should take into account interac- tions between a pair of conipoiients that are not i n a super-sub relationship.
tion-based Truth Maintenance System) [I] to inark such pairs as inconsistent. Belief of existence of component in a model is represented with an assuniptioii of ATMS. The qualitative reasoner makes a conjunction node of two conipo- nants in a super-sub structural relationship to be inconsistent. Contradicto- ries between a pair of nodes of such components avoid physical phenoniena on them to become active. Incompatible pairs are depicted in the structural hierarchy of components i n Figure 7.
In order to avoid wrong combination of components, we use ATMS (Assu~np-
Figure 9: Solid model of a boat
The inetainodel mechanisnl uses DESIGNBASE’ as a plug-in solid mod- eler. Figure 9 depicts an assentbled solid model of the boat. The boat has two wings supporting the hull in the front and rear. The solid model consists of a hull, two wings, and three struts supporting the hull on the wings. The ineta- model contains symbolic representation of coniponents corresponding to each
?DESIGNBASE is a trmleiiiark of Ra-iih Cn. Lwl.
i ixed 12257
OJ
0 - contradictory 0
Figure 7: Contradiction between assirniptions of entities
5 The Pluggable Metamodel Mechanism
5.1 The System The metarnodel mechanism based on the concept of the pluggable mchitecture is being implemented. Below its preliminary implementation is described, focusing on plugging in a solid modeler, a finite element uiesh generator, and a matheniatical equation solver. The systein is built in Sinalltalk on Suii workstations. Figure 8 depicts the structure of the system. Between the nietaniodel and an aspect model in a particular modeler, there is an interface that interprets a request of data froni the metamodel and sends a coininand to the modeler. To plug a niodeliiig system into the inetamodel mechanism. we need to build this interface and writs knowledge about how concepts wed by one modeler is related to concepts in others.
5.2 Modeling a boat In this section we illustrate how the iiietaniodel coordinates aspect niodels through an example of design of a hydrofoil boat. The shape of the hydrofoil
Figure 1 0 Aspect model of finite element analysis
part of the solid niodel. Using the correspondence between the inetamodel and the solid model, the metaniodel inechanisin obtains,geonietric informa- tion from DESIGNBASE. For instance, if volume of a coinpoilent is referred by an aspect model, the metamodel interprets it as a request to DESIGN- BASE. Then the interface to DESIGNBASE sends a query of the volume, and the answer is sent back through the inetamodel to the requesting aspect model.
We use MODIFY’ to generate finite element loesli data for analysing the strength. MODIFY uses shells to represent shapes. Based on information about geometry, niaterial property, and boundary conditions, it creates finite element mesh data. To do so, the metaniodel mechanism lim to deal with delegation, coordinate transforniation, calculation of weight, a i d equation solving. In order to generate a shell model for MODIFY, the designer ex- plicitly specifies the two wings to be modeled as shell. This approximation is represented in the inetaniodel by making the wings to be delegated by pro- totype of plate. Figure 10 is a part of the nietaniodrl relevant to MODIFY. Since the designer specifies only the wing to be taken as a shell, the hull is
123

! & I Ill
Figure 11: balance
omitted in generating tiles11 data. In other words, specifying approxiniation also determines the scope of analysis.
DESIGNBASE has a global coordinate system for locating parts. MOD- IFY, on the other hand, locates a part relatively to its adjacent part. The transformation between the global and locd coordinate systems is represented in the nietiunodel as a link between them. The link is associated with a 4 X 4 transforination matrix. When the nietanlodel nlechanisnl transfers geoniet- ric data from DESIGNBASE to MODIFY, it transforins coordinate vdue by applying the matrix.
The process of setting up a niodel for the finite element analysis is as follows. First, it qualitatively reasons out that the hull is supported by force from the wings (Figure 11). It then uses the solid inodel in DESIGNBASE to
ZV = (0,o.O) F = 10,0,-1001 t f1 t f2 n = (O,O,-II g = ~0,0*01 f l = a n f 2 = b n sl =1-10.0.-11. s2 = 120.0.-11
~ , . . ,. . . - , eqs =(vectorproduct[sl,fl] + vectorproduct[s2.f2~ + v~tolpmduct[g,F] == ZV.
am = Solve[eqs, lab)] f l +f2 + F = = z v ]
Figure 12: Equations for obtaining forces
obtain positions at which the gravity and the supporting forces are working on the hull. Since it is not yet specified that the forces are balanced, the designer has to add a constraint that the supporting forces coinpensates the gravity force. By using knowledge about balance. it generates a set of equations of the amounts of forces as shown in Figure 12. The equatious are theii solved by Mathematica, and acting force is determined quantitatively.
In addition to the boundary conditions, the mesh generator needs infor- niation about the position around which stress beconies the largest. To kiiow the position, the user approximates the wing as a beam Froni the beam model, the system calculates the distribution of bending nionient over the wing. The result is presented to the user as shown in Figure 13. MODIFY takes into account the pwition of the largest stress. From the bending 1110- ment diagram, the designer knows that the both ends of the wing should be computed precisely whereas the iniddle is less important. The designer gives thm andyticd condition to MODIFY to control inesh generation. Figure 14 shows the generated mesh for analysing distorsion of a wing. Mesh at each end is finer than that at the middle. Finally, its boundary conditions are given to MODIFY by the nietainodel.
6 Conclusions In this paper we discussed reasoning about niodels across inultiple ontologies. The purpose of using the metanlode1 is to represent how aspert models de- pend on each other, and thus to make the entire inodeling systeni flexible. If the relationship is encoded in the modeling system. plugging in a new as- pect niodel causes total change of the niodel nianager. In order to integrate aspect models, the nietaniodel lnechanisnl transforms facts represented i n an aspect model to another. In addition to causal relationships among physi- cal phenomena, the nietaniodel must represent other kinds of relationships
Figure 13: Bending nioinent diagram of a wing
such as differences in the level of abstraction, approxiniation. graiiiilarity. and correspondences between synlbolic and spatid representations.
Acknowledgement The authors would like to thank Prof. Akihiro Kubotaof RACE, The Univer- sity of Tokyo, for providing the boat design example and making MODIFY available for us. Masaharu Yoshioka and Masahiko Nakaniura contributed to the itnplenientation of the system.
References de Kleer, J. and Brown, J . , 1986, Theories of Causal Ordering, ..lrtifiriul Intelligence Vol. 29, pp.33-61.
Forbus, K., 1984, Qualitative Process Theory, Arttficaal Inlelhgence VOI. 24, pp.85-168.
Kiriyama, T., Tomiyama. T., and Yoshikawa, H., 1991, The Use of Quali- tative Physics for Integrated Design Object Modeling, in Stauffer, L. (ed.), Design Theory and Methodology -DTM'91-. pp. 53-60.
Kiriyania, T., Tomiyama, T., and Yoshikawa.H., , 1991, Model Genera-. tion in Design, in Fifth International Workshop on Qualitative Reasoning
I
Figure 14: Generated mesh of a hydrofoil
about Physical Systems, pp. 93-108.
Kiriyania, T. , Toniiyania, T., and Yoshikawa.H., , 1992, Building a Pliysi- cal Feature Database for Integrated Modeling i n Design, in The Sixth In- ternational Workshop on Qualitative Reasoning about Physical Systems, pp. 124-138.
Kiriyania, T. , Yamanloto, F.. Toniiyania, T., and Yoshikzwa, H., 1989, Metaniodel: An Integrated Modeling Franiework for Intelligent CAD, in Gero, J. (ed.), Artificial Intelligence in Design, Southainptoii, pp. 429-449.
Lieberman. H., 1986, Using Prototypical Objects to Itnplenient Shared Behavior i n Object Oriented Systems, in Object Oriented Coniputing 1986, pp. 189-198.
[8] Toniiyama, T., Kiriyaina, T., Takeda, H., Xue. D., and YoshiLiwa, H., 1989, Metaniodel: A Key to Intelligent CAD System, Research in Enq- neering Design Vol. 1, No. 1, pp.19-34.
191 Toiniyruna. T. and Unieda, Y., 1983, A CAD for Functional Design, i n Annals of the CIRP '93, pp. 143-146.
124