an implementation of model-free face detection and...
TRANSCRIPT
An Implementation of Model-Free Face Detection and Head Tracking with Morphological Hole
Mapping in C#
ENCM 503: Digital Video Processing Department of Electrical and Computer Engineering
Schulich School of Engineering University of Calgary
Paul Lapides Charles Hateley
December 7, 2007

Table of Contents Abstract ............................................................................................................................... 1
Procedure ............................................................................................................................ 1
Binary Skin map ............................................................................................................. 2
RGB skin clustering.................................................................................................... 2
YCrCb skin clustering................................................................................................. 2
HSV skin clustering .................................................................................................... 3
Observations ............................................................................................................... 3
Morphological Face Extraction....................................................................................... 3
Closing the Skin Regions............................................................................................ 3
Dilation ....................................................................................................................... 4
Erosion ........................................................................................................................ 4
Hole map..................................................................................................................... 4
Labeling ...................................................................................................................... 5
Identify Faces.................................................................................................................. 7
Limitations and Improvements ........................................................................................... 8
Lighting Conditions ........................................................................................................ 8
False Positives and Recognition Problems ..................................................................... 9
Imperfect Closing............................................................................................................ 9
Speed............................................................................................................................. 10
Credits ............................................................................................................................... 10

Abstract This project implements face detection and tracking using morphological methods as
outlined by [1]. An interactive C# program was developed which uses a supplied camera
interface [5] for acquiring image data. This interface was the only library used in the
implementation – image-processing functionality was implemented specific to the classes
defined in the project.
The proposed method fares quite well at detecting faces in varying conditions as well the
tracking there of. The hole-mapping method successfully detects faces at most rotational
angles as long as some face is showing.
Procedure The algorithm we implemented finds face regions by examining the number of “holes”
(e.g. eyes, nose, mouth, ears) in each region. If the number of holes is above a threshold,
the region is considered a face.
Regions are created by applying a simple set of rules to each pixel in the image [1]. These
rules determine if the pixel is skin colored and should be considered further. This creates
a black & white image (not grayscale) of candidate skin regions.
Some regions will have black holes inside of them that could be eyes, nose, etc and need
to be isolated. To isolate, the skin regions are “closed”, which means that these holes are
filled in. Closing is done by two similar operations called dilation and erosion [2,3]. Once
the holes are closed, the original skin regions are subtracted from the closed regions,
leaving only the holes.
Both the skin and hole regions are then labeled, which assigns connected regions a
unique tag [4]. The labeled hole image is overlaid above the labeled image and the
number of holes above each labeled region are counted. The labeled regions with the
most holes are considered faces and are enclosed with a rectangle.
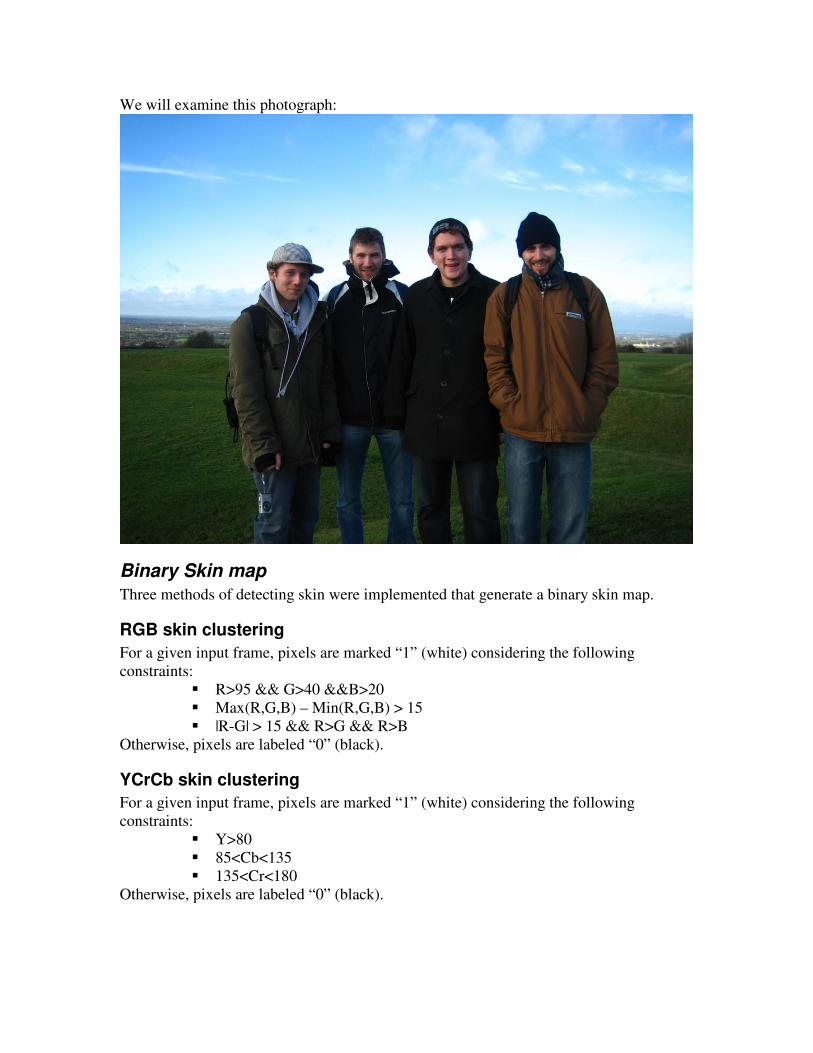
We will examine this photograph:
Binary Skin map
Three methods of detecting skin were implemented that generate a binary skin map.
RGB skin clustering
For a given input frame, pixels are marked “1” (white) considering the following
constraints:
� R>95 && G>40 &&B>20
� Max(R,G,B) – Min(R,G,B) > 15
� |R-G| > 15 && R>G && R>B
Otherwise, pixels are labeled “0” (black).
YCrCb skin clustering
For a given input frame, pixels are marked “1” (white) considering the following
constraints:
� Y>80
� 85<Cb<135
� 135<Cr<180
Otherwise, pixels are labeled “0” (black).
HSV skin clustering
For a given input frame, pixels are marked “1” (white) considering the following
constraints:
� 0<H<50
� 0.23<S<0.68
Otherwise, pixels are labeled “0” (black).
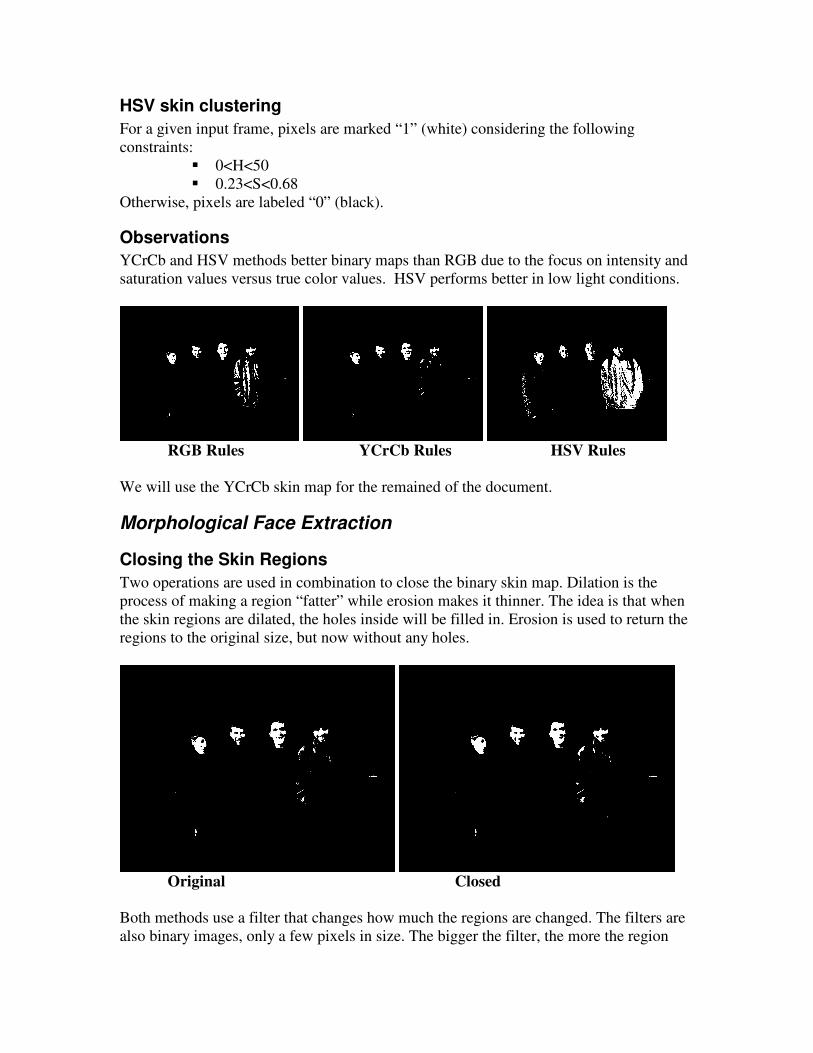
Observations
YCrCb and HSV methods better binary maps than RGB due to the focus on intensity and
saturation values versus true color values. HSV performs better in low light conditions.
RGB Rules YCrCb Rules HSV Rules
We will use the YCrCb skin map for the remained of the document.
Morphological Face Extraction
Closing the Skin Regions
Two operations are used in combination to close the binary skin map. Dilation is the
process of making a region “fatter” while erosion makes it thinner. The idea is that when
the skin regions are dilated, the holes inside will be filled in. Erosion is used to return the
regions to the original size, but now without any holes.
Original Closed
Both methods use a filter that changes how much the regions are changed. The filters are
also binary images, only a few pixels in size. The bigger the filter, the more the region
will be dilated or eroded. A circle was used in our implementation, but a square will be
used in the explanations to follow.
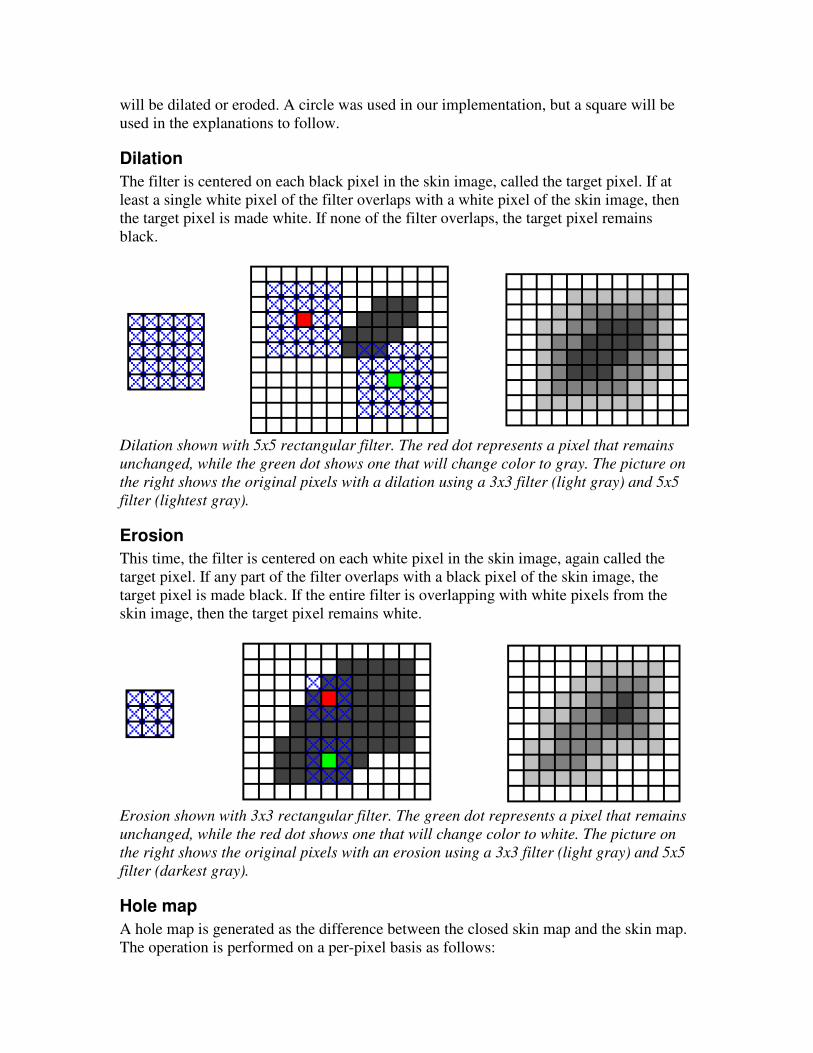
Dilation
The filter is centered on each black pixel in the skin image, called the target pixel. If at
least a single white pixel of the filter overlaps with a white pixel of the skin image, then
the target pixel is made white. If none of the filter overlaps, the target pixel remains
black.
Dilation shown with 5x5 rectangular filter. The red dot represents a pixel that remains
unchanged, while the green dot shows one that will change color to gray. The picture on
the right shows the original pixels with a dilation using a 3x3 filter (light gray) and 5x5
filter (lightest gray).
Erosion
This time, the filter is centered on each white pixel in the skin image, again called the
target pixel. If any part of the filter overlaps with a black pixel of the skin image, the
target pixel is made black. If the entire filter is overlapping with white pixels from the
skin image, then the target pixel remains white.
Erosion shown with 3x3 rectangular filter. The green dot represents a pixel that remains
unchanged, while the red dot shows one that will change color to white. The picture on
the right shows the original pixels with an erosion using a 3x3 filter (light gray) and 5x5
filter (darkest gray).
Hole map
A hole map is generated as the difference between the closed skin map and the skin map.
The operation is performed on a per-pixel basis as follows:

Equation 1
),(),(),( yxPyxPyxP SkinCSkinhole −=
The result is a new binary image representing the “holes” in the skin regions.
Labeling
Each skin and hole region must be labeled so it can be treated as a single unit instead of
simply a group of connected pixels. Labeling is done by assigning unique tags (numbers)
to each pixel in the image. Black pixels are given a tag of 0, while white pixels have tags
that are greater than zero, kept track with a counter that is incremented.
The image is scanned left to right, row by row. Only white pixels are considered for
tagging. A target pixel will have four neighbors that have already been tagged. The left,
up-left, up, and up-right will be used to assign a tag to the target pixel. There are three
possible cases that can occur.
The first case is if none of the neighbor pixels are white. The neighbors will all have tags
of 0. A new unique tag is assigned to the target pixel using the value of the counter. The
counter is incremented.
The second case is if only one of the neighbor pixels is white. This neighbor will have a
non-zero tag that will be assigned to the target pixel since the two pixels are touching
(they are neighbors).
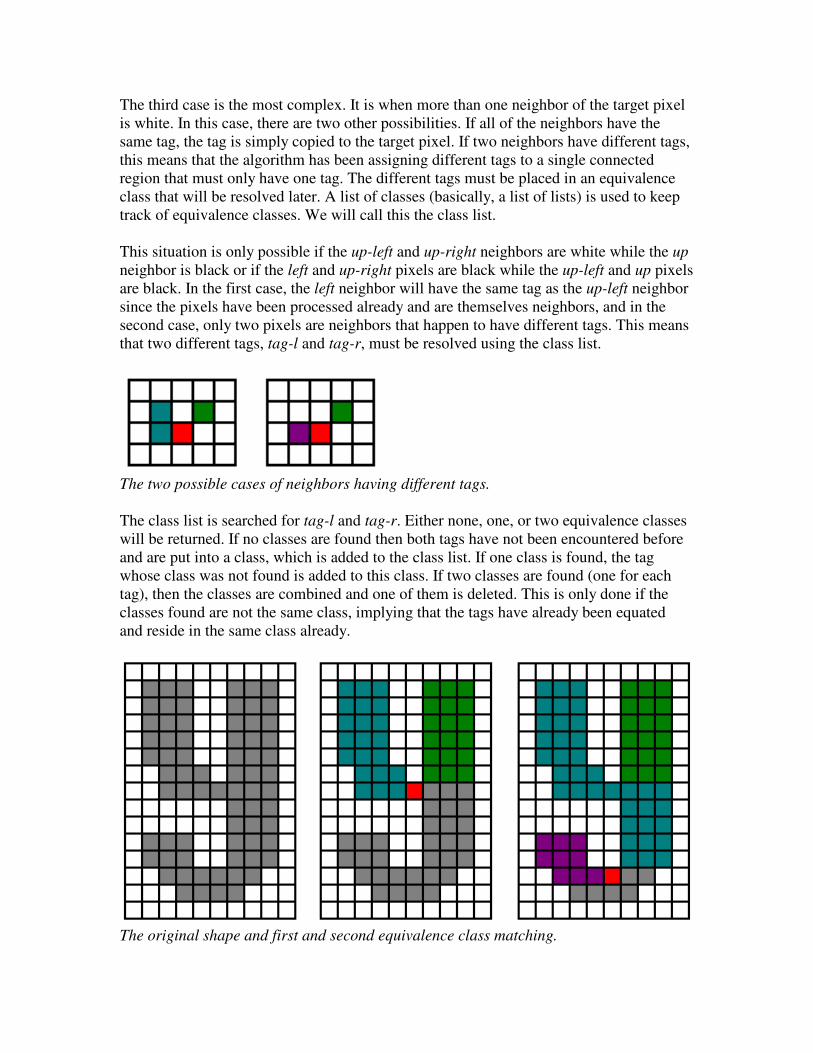
The third case is the most complex. It is when more than one neighbor of the target pixel
is white. In this case, there are two other possibilities. If all of the neighbors have the
same tag, the tag is simply copied to the target pixel. If two neighbors have different tags,
this means that the algorithm has been assigning different tags to a single connected
region that must only have one tag. The different tags must be placed in an equivalence
class that will be resolved later. A list of classes (basically, a list of lists) is used to keep
track of equivalence classes. We will call this the class list.
This situation is only possible if the up-left and up-right neighbors are white while the up
neighbor is black or if the left and up-right pixels are black while the up-left and up pixels
are black. In the first case, the left neighbor will have the same tag as the up-left neighbor
since the pixels have been processed already and are themselves neighbors, and in the
second case, only two pixels are neighbors that happen to have different tags. This means
that two different tags, tag-l and tag-r, must be resolved using the class list.
The two possible cases of neighbors having different tags.
The class list is searched for tag-l and tag-r. Either none, one, or two equivalence classes
will be returned. If no classes are found then both tags have not been encountered before
and are put into a class, which is added to the class list. If one class is found, the tag
whose class was not found is added to this class. If two classes are found (one for each
tag), then the classes are combined and one of them is deleted. This is only done if the
classes found are not the same class, implying that the tags have already been equated
and reside in the same class already.
The original shape and first and second equivalence class matching.
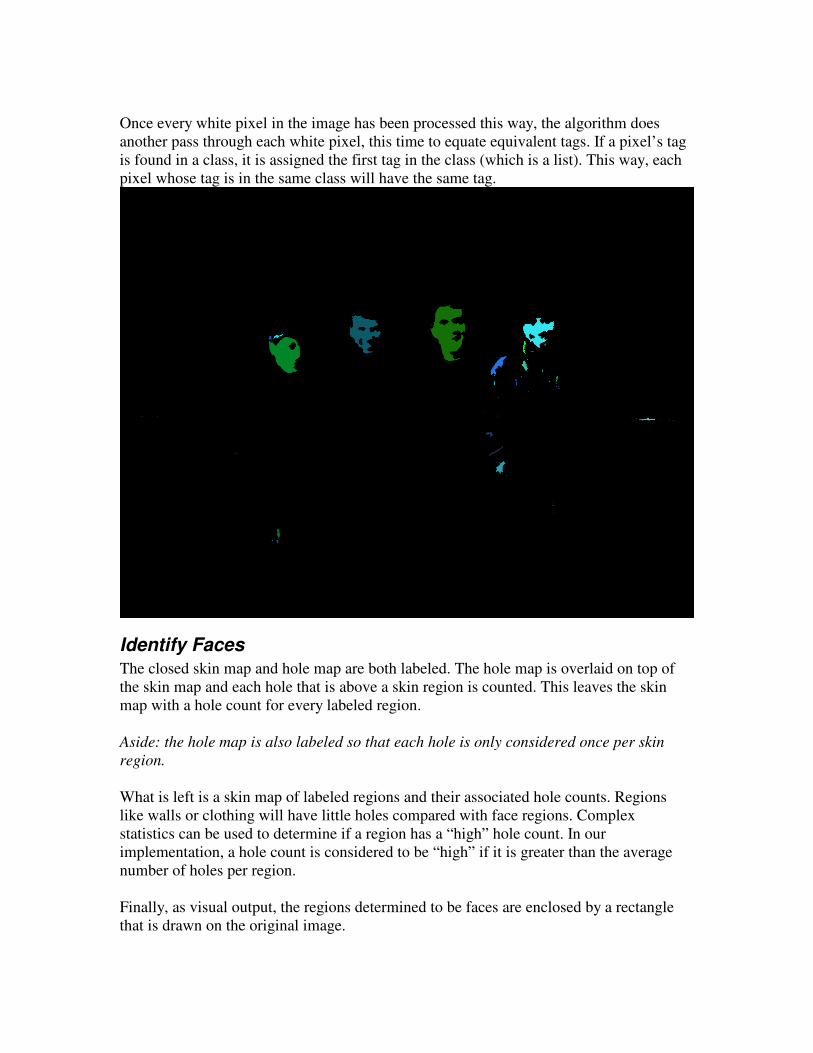
Once every white pixel in the image has been processed this way, the algorithm does
another pass through each white pixel, this time to equate equivalent tags. If a pixel’s tag
is found in a class, it is assigned the first tag in the class (which is a list). This way, each
pixel whose tag is in the same class will have the same tag.
Identify Faces
The closed skin map and hole map are both labeled. The hole map is overlaid on top of
the skin map and each hole that is above a skin region is counted. This leaves the skin
map with a hole count for every labeled region.
Aside: the hole map is also labeled so that each hole is only considered once per skin
region.
What is left is a skin map of labeled regions and their associated hole counts. Regions
like walls or clothing will have little holes compared with face regions. Complex
statistics can be used to determine if a region has a “high” hole count. In our
implementation, a hole count is considered to be “high” if it is greater than the average
number of holes per region.
Finally, as visual output, the regions determined to be faces are enclosed by a rectangle
that is drawn on the original image.

Limitations and Improvements
Lighting Conditions
The rules for identifying skin are based entirely on color. When a poorly lit image is
captured, the colors of the skin pixels are not the same as in a well lit image. Because of
this discrepancy, skin regions are not correctly identified if the image is too dark.
A value can be computed based on the average brightness or contrast of the image that
can be used to adjust the values used in the skin rules.

False Positives and Recognition Problems
Regions that are not faces are sometimes incorrectly identified as faces. This is because
the region is skin colored and has a high number of holes – the exact metrics we use to
detect faces. For example, an arm with a tattoo or a beige colored shirt with a graphic will
be considered skin while the tattoo and graphic will not, creating holes. This will
contaminate the hole count for that region, causing it to be incorrectly detected as skin.
Also, if a face is far away from the camera it will be identified as a small patch of skin.
However, because it is far away, it is unlikely that the facial features will be captured
with the resolution, resulting in skin with no holes. This causes real faces to go
undetected while other skin colored regions with holes to be incorrectly detected.
The size of the holes may taken into consideration when they are overlaid on top of the
skin regions so that only larger holes will be counted.
Hands and walls are detected as faces.
Imperfect Closing
The closing procedure uses dilation and erosion to remove holes from a skin region.
Dilation makes the regions “fatter” and this has the side effect of linking two
disconnected skin regions together. These regions remain connected after the erosion
process, contaminating the image with a large skin region. If the two previously separate

regions were faces, a new, connected, region exists with a very high amount of holes –
twice the normal amount for a face.
This high hole count will bring the average holes per region up and will cause other real
faces to not be identified. As well, two faces will be detected as a single face, due to the
fact that both faces have been combined into a single region.
A better closing routine can solve this problem, but may be more computationally
expensive than dilation and erosion. Smaller filters may be used that will not make the
regions a lot “fatter” during dilation, but holes may be not be completely closed, causing
problems generating the hole map.
The dilation blends many separated regions into a single connected region that will be
classified as a very large face.
Speed
The procedure just outlined performs at approximately 2 frames per second on a dual-
core machine (1.66GHz per core) using frames that are 320 x 240 pixels. This is
sufficient for refreshing the position of the rectangles on top of the original image in real
time. However, higher resolution frames perform much slower and cannot be used for
real time applications.
The skin mapping, dilation, erosion, and hole mapping routine have a computational
complexity of O(n) where n is the number of pixels in the image. However, the labeling
routine is slower, having a complexity of O(n2) due to the equivalence class matching.
Scaling the original image to half its dimensions will result in a loss of detection
accuracy, as the holes of the original image may be lost when the image is scaled.
Credits [1] Udo Ahlvers, Ruben Rajagopalan, Udo Z¨olzer. “Model-Free Face Detection and
Head Tracking with Morphological Hole Mapping”, in 13th
European Signal
Processing Conference: EUSIPCO’2005, Antalya, Turkey, September 4-8, 2005.

[2] Robert Fisher, Simon Perkins, Ashley Walker and Erik Wolfart. (2003).
Morphology – Dilation. Retrieved Dec, 2007, from HIPR – HyperMedia Image
Processing Reference. http://www.cee.hw.ac.uk/hipr/html/dilate.html
[3] Robert Fisher, Simon Perkins, Ashley Walker and Erik Wolfart. (2003).
Morphology – Erosion. Retrieved Dec, 2007, from HIPR – HyperMedia Image
Processing Reference. http://www.cee.hw.ac.uk/hipr/html/erode.html
[4] Robert Fisher, Simon Perkins, Ashley Walker and Erik Wolfart. (2003). Image
Analysis – Connected Components Labeling. Retrieved Dec, 2007, from HIPR2 –
Image Processing Learning Resources.
http://homepages.inf.ed.ac.uk/rbf/HIPR2/label.htm
[5] EasyImage Camera Library, Saul Greenberg and Mark Watson, iLab, Department
of Computer Science, University of Calgary.
http://grouplab.cpsc.ucalgary.ca/cookbook/index.php/Toolkits/EasyImage