an astronaut ‘bio-suit’ system: exploration-class missions · an astronaut ‘bio-suit’...
TRANSCRIPT

An Astronaut ‘Bio-Suit’ System:Exploration-Class Missions
Professor Dava J. Newman, Ph.D.*+
Professor Jeff Hoffman*
Kristen Bethke*, Joaquin Blaya+, Christopher Carr*+, andBradley Pitts*
*MIT Department of Aeronautics and Astronautics+Harvard-MIT Division of Health Science and Technology
MIDÉ Technologies, TAI
6 November 2003 Image, © Michael Light, Full Moon

Industry PartnersIndustry Partners
Midé Technology Corporationis a R&D company thatdevelops, produces, andmarkets High PerformancePiezo Actuators, Software, andSmart (Active) MaterialsSystems; primarily for theaerospace, automotive andmanufacturing industries.
Trotti & Associates, Inc. (TAI)TAI is a design consulting firmhelping private and publicorganizations visualize anddevelop solutions for newproducts, and technologies inthe areas of Architecture,Industrial Design, andAerospace Systems.
Award-winning designs for:Space Station, South PoleStation, underwater habitats,ecotourism.
Phase I partner.
Advisory BoardDr. Chris McKay, expert in astrobiology, of NASA ARC.Dr. John Grunsfeld, NASA Chief Scientist, astronaut. Dr. Cady Coleman, NASA astronaut.Dr. Buzz Aldrin, Apollo 11 astronaut.

OverviewOverview
• Space Exploration• Performance• Design Concepts• Systems Approach

Space Suit Design: MotivationSpace Suit Design: Motivation• Extravehicular Mobility Unit (EMU)
– Designed for weightlessness– Pressurized suit (29 kPa, 4.3 psi)– Life support system (O2, CO2, etc.)– 2 pieces: pants, arms & hard upper torso– Donning and doffing are highly involved– Adequate mobility for ISS– NOT a locomotion/exploration suit
• Number of EVAs (1965-2000)– 600-surface-day mission

Mark III: Fieldgeology in theMojave Desert
59kg suit + 15kg life support
57.2 kPa/8.2 psi
30kg suit
26.2 kPa/3.8 psi
12 kg suit
26.2 kPa/3.8 psi
Space Suit Design: MethodsAnalyze Past Performance• Metabolic Cost, Voice Communications, Tool Usage
• Understand limitations (physical, cognitive, environmental., ops.)
New Solutions
• Information Management: Wearable Computing, Planning, Geologic Tools [Carr, Schwartz, Newman, 2001]
• Skills-based training vs. task-based
• Metabolic Cost Model
“Biosuit”
MechanicalCounter-Pressure?
Advance Concepts

Background and ContributionsBackground and Contributions
Bio-Suit ConceptsPerformance &Modeling
Space Suit Mobility
Biomechanics &EnergeticsNewman et al., 1993,1994, 1996
Human SubjectsMorgan et al., 1996
Newman et al., 2000
Schmidt et al., 2001
Mechanical CounterPressureWebb, 1967
Clapp, 1983
Tourbier, 2001
Korona, 2002
Eiken, 2002
Pitts, Newman et al., 2001
ModelingIberall, 1970
Rahn, 1997; Schmidt,2001; Carr, 2001
EnhancedPerformanceBlaya, Newman, 2003
Iberall, 1964
SuitsDionne, 1991
Abramov, 1994
Menendez, 1994

Space Exploration (e.g., field geology)Space Exploration (e.g., field geology)
• Look to future (1) Mobility and(2) Performance
• Understand exploration techniques• Learn from past expeditions
Pat Rawlings (NASA)
Lewis and Clark
Present DayField Geology
Lunar FieldGeology, Past
& Future© Michael Light, Full Moon

Automation in the planning process?
Mission and Traverse PlanningMission and Traverse Planning
Method(1) Terrain Model, Spatial and Temporal Characteristics; Sun Geometry(2) Predictive and parametric analysis including automated validation of ‘mission rules’.
Results(3) Outputs and Metrics: Traverse model, slope statistics, accessibility, visibility, energyconsumption, low-energy direction of travel, and sun-relative angles and sun-score.
(1)Inputs
(2)Traverse
Evaluation
(3)OutputsandMetrics
[Carr, Newman, Hodges 2003]
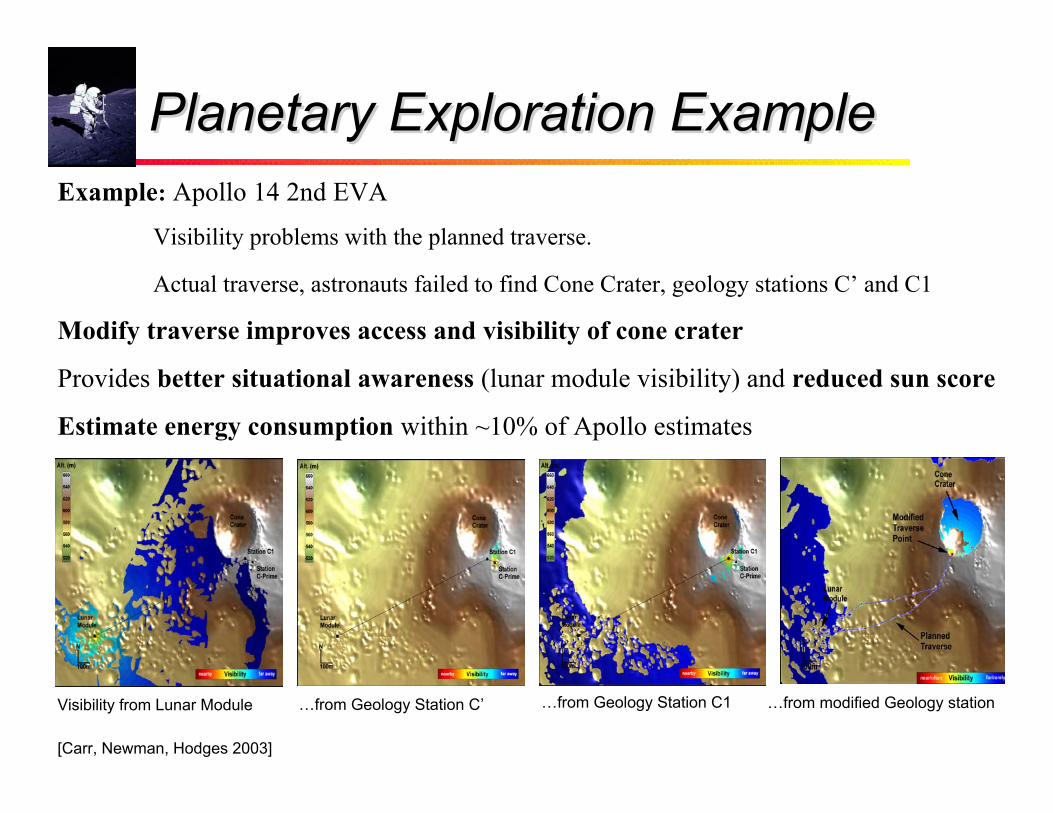
Planetary Exploration ExamplePlanetary Exploration Example
[Carr, Newman, Hodges 2003]
Example: Apollo 14 2nd EVA
Visibility problems with the planned traverse.
Visibility from Lunar Module …from Geology Station C’ …from Geology Station C1 …from modified Geology station
Actual traverse, astronauts failed to find Cone Crater, geology stations C’ and C1
Modify traverse improves access and visibility of cone crater
Provides better situational awareness (lunar module visibility) and reduced sun score
Estimate energy consumption within ~10% of Apollo estimates

PerformancePerformance
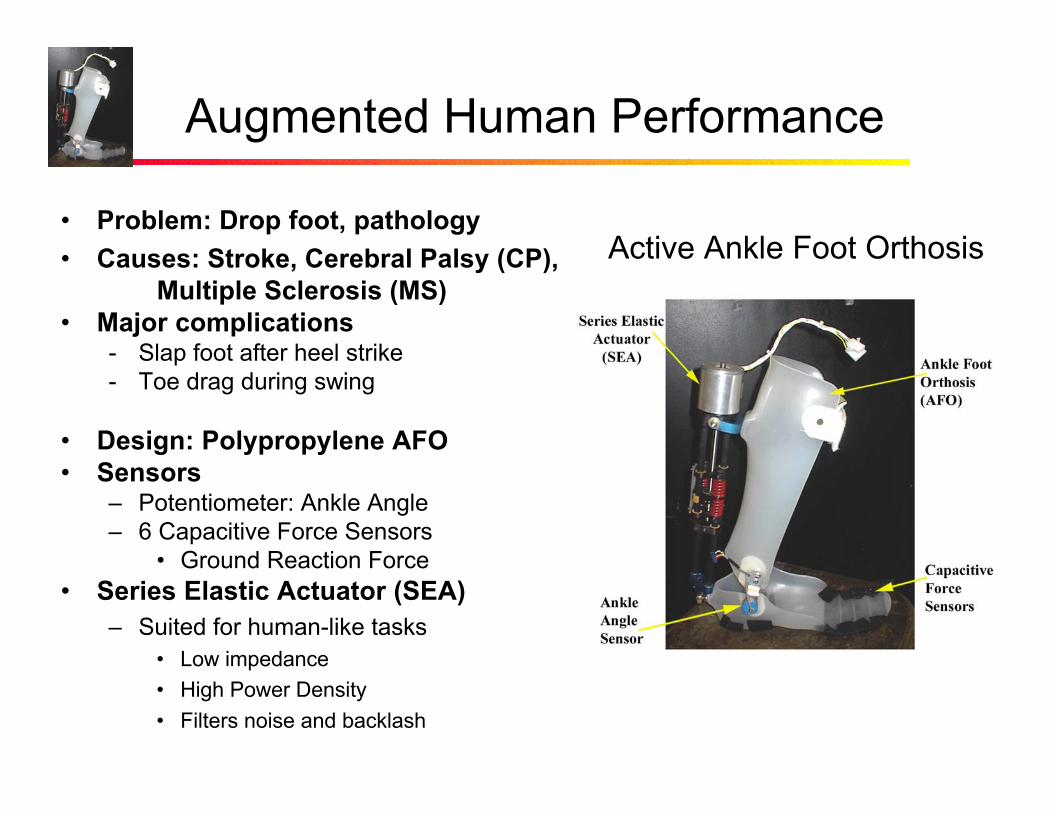
• Problem: Drop foot, pathology
• Causes: Stroke, Cerebral Palsy (CP),Multiple Sclerosis (MS)
• Major complications- Slap foot after heel strike- Toe drag during swing
• Design: Polypropylene AFO• Sensors
– Potentiometer: Ankle Angle– 6 Capacitive Force Sensors
• Ground Reaction Force• Series Elastic Actuator (SEA)
– Suited for human-like tasks• Low impedance
• High Power Density
• Filters noise and backlash
Augmented Human Performance
Active Ankle Foot Orthosis
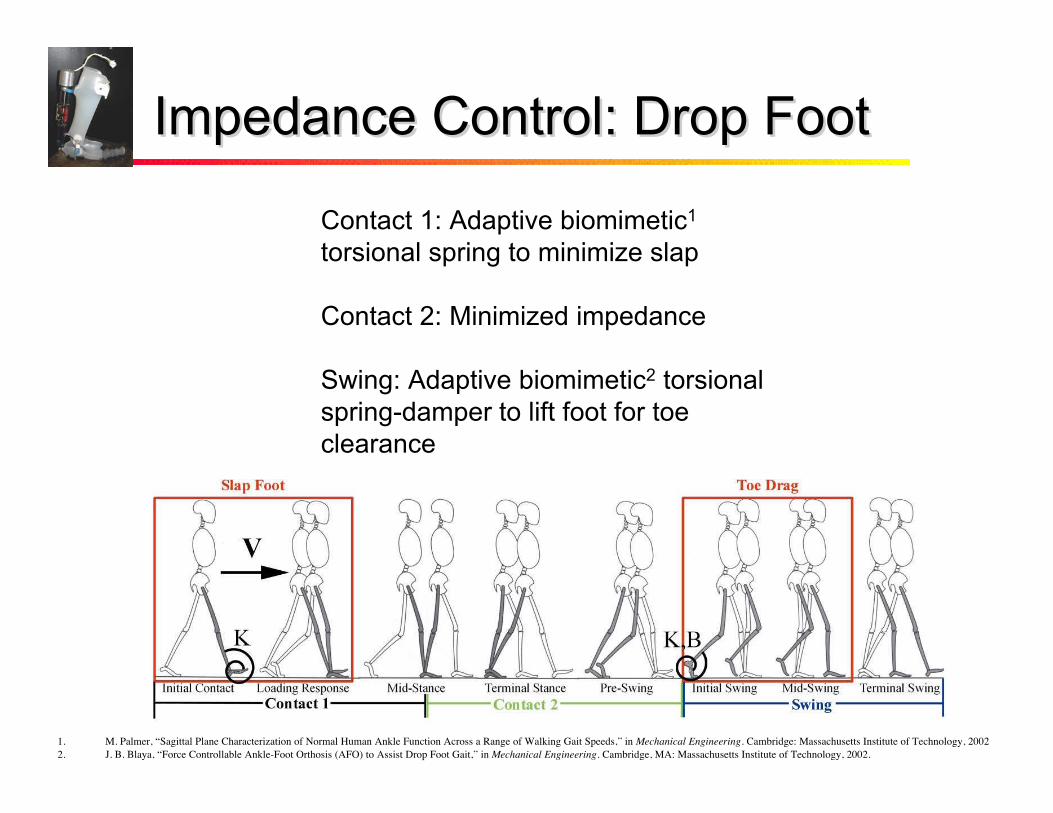
Impedance Control: Drop FootImpedance Control: Drop Foot
Contact 1: Adaptive biomimetic1
torsional spring to minimize slap
Contact 2: Minimized impedance
Swing: Adaptive biomimetic2 torsionalspring-damper to lift foot for toeclearance
1. M. Palmer, “Sagittal Plane Characterization of Normal Human Ankle Function Across a Range of Walking Gait Speeds,” in Mechanical Engineering. Cambridge: Massachusetts Institute of Technology, 20022. J. B. Blaya, “Force Controllable Ankle-Foot Orthosis (AFO) to Assist Drop Foot Gait,” in Mechanical Engineering. Cambridge, MA: Massachusetts Institute of Technology, 2002.

Engineering methodology: variable-impedance control- Slap foot was reduced- Swing was more biologically realistic
Design Goal: modulate joint impedance to gait phase and speedUnlike current devices, variable-impedance control adapts to user
1. Step-to-step variations due to speed changes2. Long-term changes due to rehabilitation
Personal and subjective benefits
Summary: Augmented PerformanceSummary: Augmented Performance
Design ConceptsDesign Concepts
• Mechanical Counter Pressure(MCP)

Space Activity SuitSpace Activity Suit
Accomplishments:
- Up to 22.7 kPa (3.3 psi, 170 mmHg) over entirebody
- Greater mobility
- Lower energy cost
- Simplified life support
Areas for Improvement:
- Don/Doff time and difficulty
- Edema and blood pooling dueto pressure variations
Webb 1971

SAS: A Closer LookSAS: A Closer Look

Pressure Skin RequirementsPressure Skin Requirements
Physiological Requirements– Partial pressure O2 > 20.0kPa (2.9psi, 150mmHg)*
– Body surface pressure = breathing pressure
Mobility Requirements– Constant volume design
• Small separation between suit and bodyÆ Mechanical Counterpressure
– Thin materials– Conflicting requirements
dv = S dA
dASsuit
body
Webb, 1967, 1971
T = pr
Pressure produces tensionand vice versa.
p = T/r

MCP Don/DoffingMCP Don/Doffing• SAS body surface pressure was created
by strain energy of material• Work must be done in order to store this
energyThe SAS was very hard to get into!
• Energy (or tension) could be created AFTER donning is complete by:
Shrinking garment “Enlarging” body
OR
Cam Brensinger for TAI

Creating MCP: Channel DesignCreating MCP: Channel Design
•Pressurized channel pulls tension once the suit is donned and pressurized.
•Skin-tight, inelastic garmentminimizes the volume of the suit and transmits tension.
•How can an inelastic garment allow mobility?
•Requirement on E?

‘Bio-Suit’ Concepts: Design Trades‘Bio-Suit’ Concepts: Design Trades

Revolutionary Design: Bio-SuitRevolutionary Design: Bio-Suit
Mechanical Counter Pressure(MCP)
– Skin suit cf. pressure vessel– Greater flexibility, dexterity– Lightweight– Easy donning and doffing: {clothing vs.
strapping on spacecraft (ISS suits)}
Electro-Mechanical assistance– Augments astronaut’s capabilities– Decreases the effects of microgravity
deconditioning– Assisted locomotion 1G (AAFO)

Suit ComponentsSuit Components
Bio-Suit multiple components:– The MCP bio-suit layer– A pressurized helmet– Gloves and boots– A hard torso shell– A life support backpack
Components are simple, interchangeable,and easy to maintain and repair
Idea: Custom-fit skin suit to an individualhuman/digital model
DW = DWp + DWeDWp - Minimize through designDWe - Bending (design) and Strain Energy (min.
or max E)
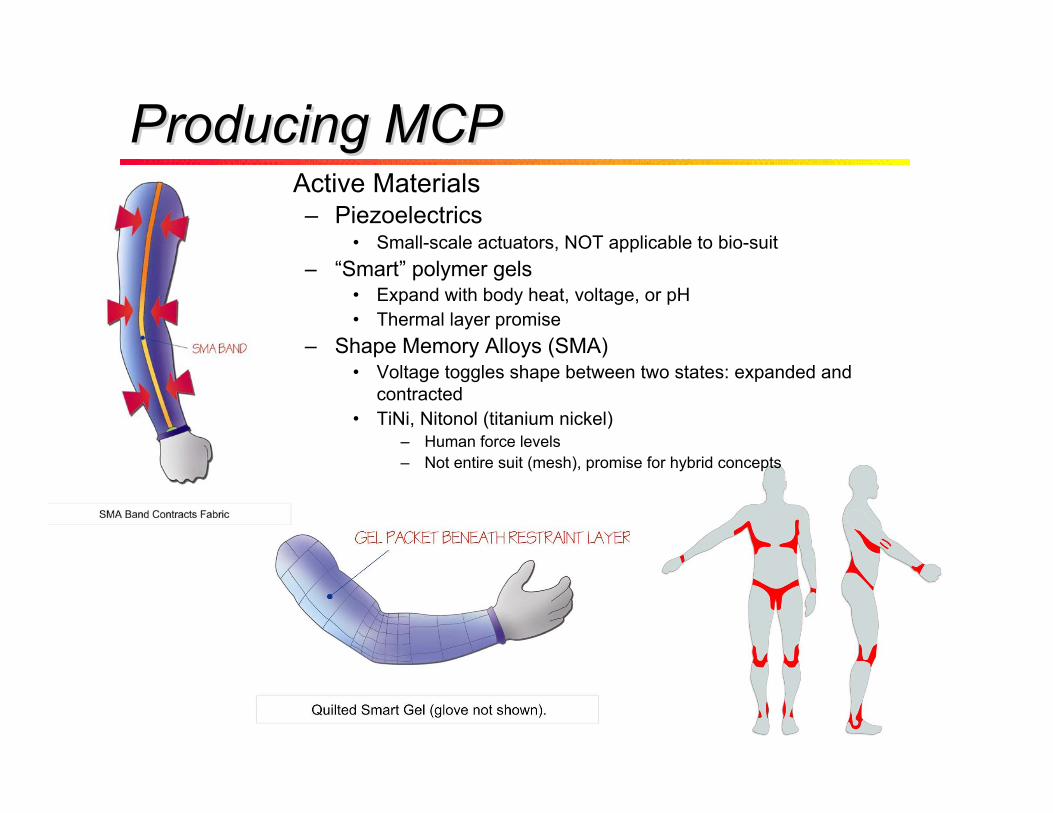
Producing MCPProducing MCP• Active Materials
– Piezoelectrics• Small-scale actuators, NOT applicable to bio-suit
– “Smart” polymer gels• Expand with body heat, voltage, or pH• Thermal layer promise
– Shape Memory Alloys (SMA)• Voltage toggles shape between two states: expanded and
contracted• TiNi, Nitonol (titanium nickel)
– Human force levels– Not entire suit (mesh), promise for hybrid concepts

Active Materials DatabaseActive Materials Database
• “New” field of active materials– many competing systems types
• Designers need method of easily comparingvarious materials and impact on system design
• Mass, Volume, Cost; Energy (Power); Performance
• Realistic operating environment
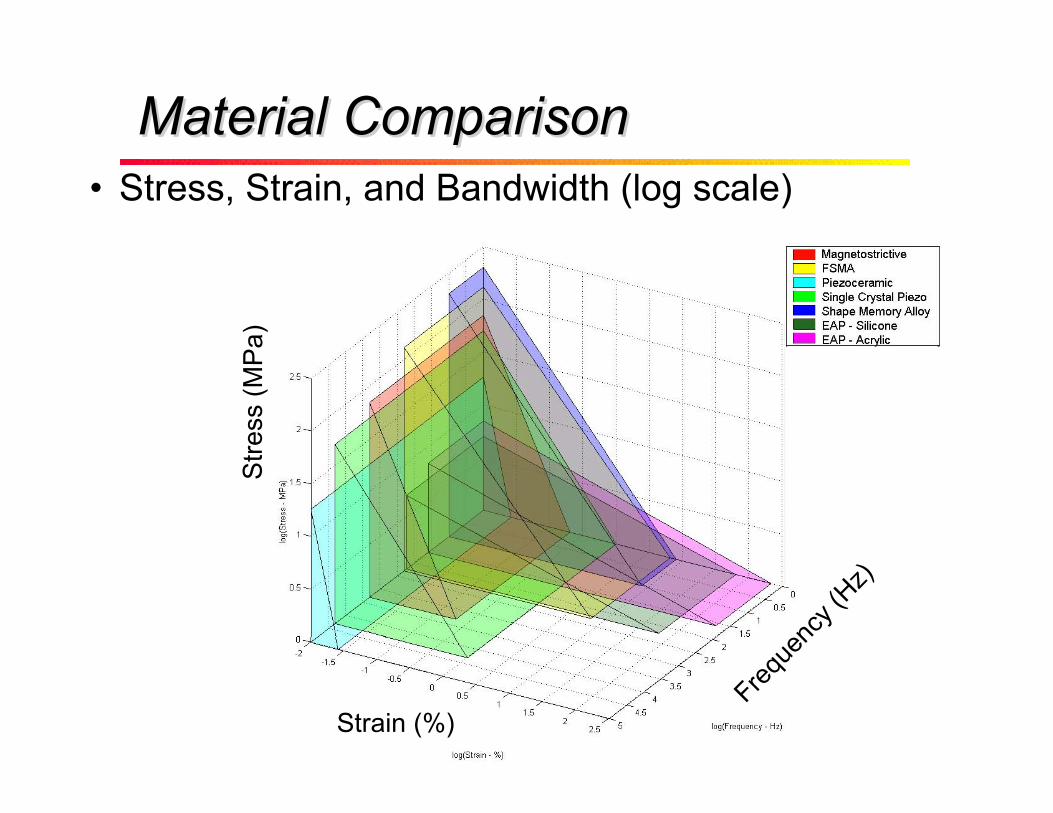
Material ComparisonMaterial Comparison• Stress, Strain, and Bandwidth (log scale)
Str
ess
(MP
a)
Strain (%)Fre
quen
cy (H
z)

Systems Level ImpactSystems Level Impact
• Certain active materials may look attractive whenconsidering raw material energy density or basic actuatorbandwidth.
• However, true material comparisons can only be madeupon considering entire system:– Material energy density– Coupling efficiencies– Cost, weight, and efficiency of power electronics.
• For example, SMAs have tremendous energy density butvery poor electrical efficiency.

Paint It On or Shrink WrapPaint It On or Shrink Wrap
• Electrospinlacing providesseamless MCP layer.– Multi-filament fiber projected via
electric charge onto groundedsurface
– Greatly improved tactile feedback– Custom, form fit– Seamless integration of wearable
computing• Melt Blowing
– Blowing liquefied polymer ontosurfaces
• Melt Spinning– MIT colleague ChemE and
Institute for SoldierNanotechnology (ISN)
(MOU: Natick National Protection Center)

Design by NatureDesign by Nature
Apply biomimetics to Bio-Suit: Imitate nature’s design
Remarkable adaptations to gravity
Giraffes (>5 m, 1900 kg) and Snakes
Giraffe’s challenge: hydrostatic pressure gradient imposes 400 mmHgpressure difference in head between ground level and tree level
Giraffe’s solution: neck skin provides pressurization to assist the bloodvessels with transport, compensating for the enormous pressuredifferences between heart and head (Hargens et al., 1987 and Wood et al., 1992)
Energy HarvestingEnergy Harvesting
• Harvest from the environment:– Thin films enable integrated heat pump capabilities (Hodgson 2003)– Photovoltaics convert solar energy into electric charge for suit
(Hodgson 2003)
• Harvest from the body:– Piezo Energy Generator (PEG) Module converts mechanical strain
into electric charge (MIDÉ 2003)
• Current efficiency levels are not sufficient for any of thesematerials

VisualizationsVisualizations
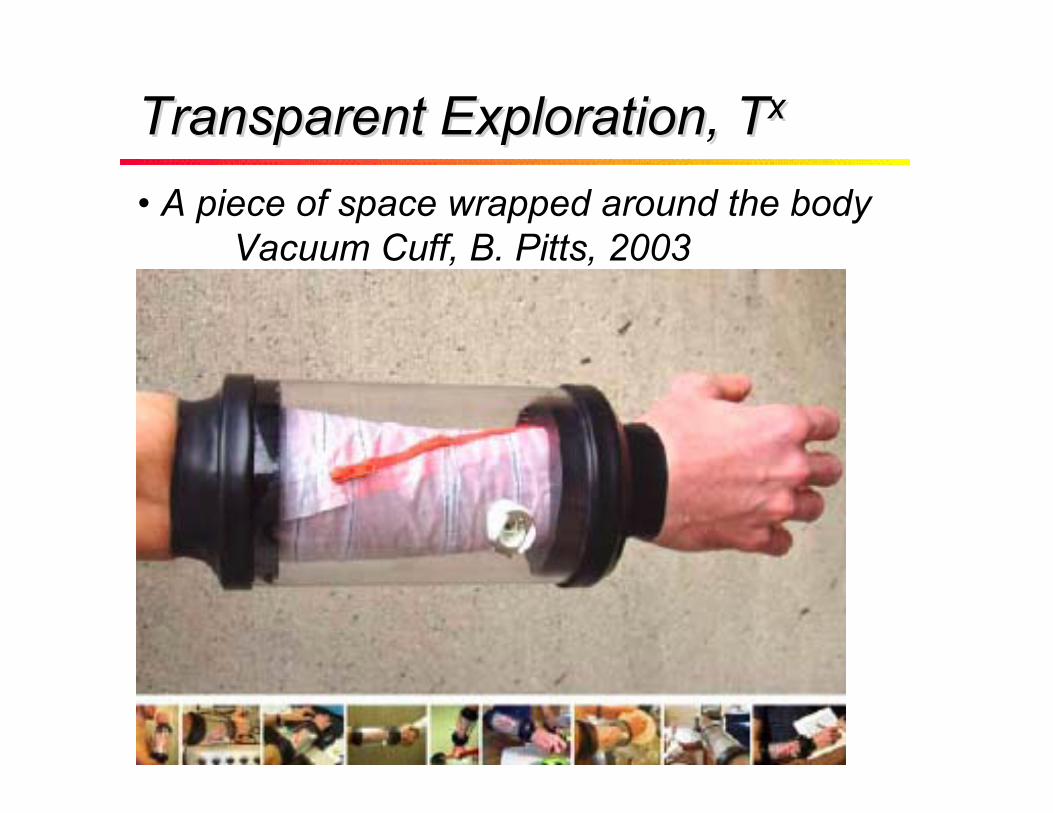
Transparent Exploration, TxTransparent Exploration, Tx
• A piece of space wrapped around the bodyVacuum Cuff, B. Pitts, 2003
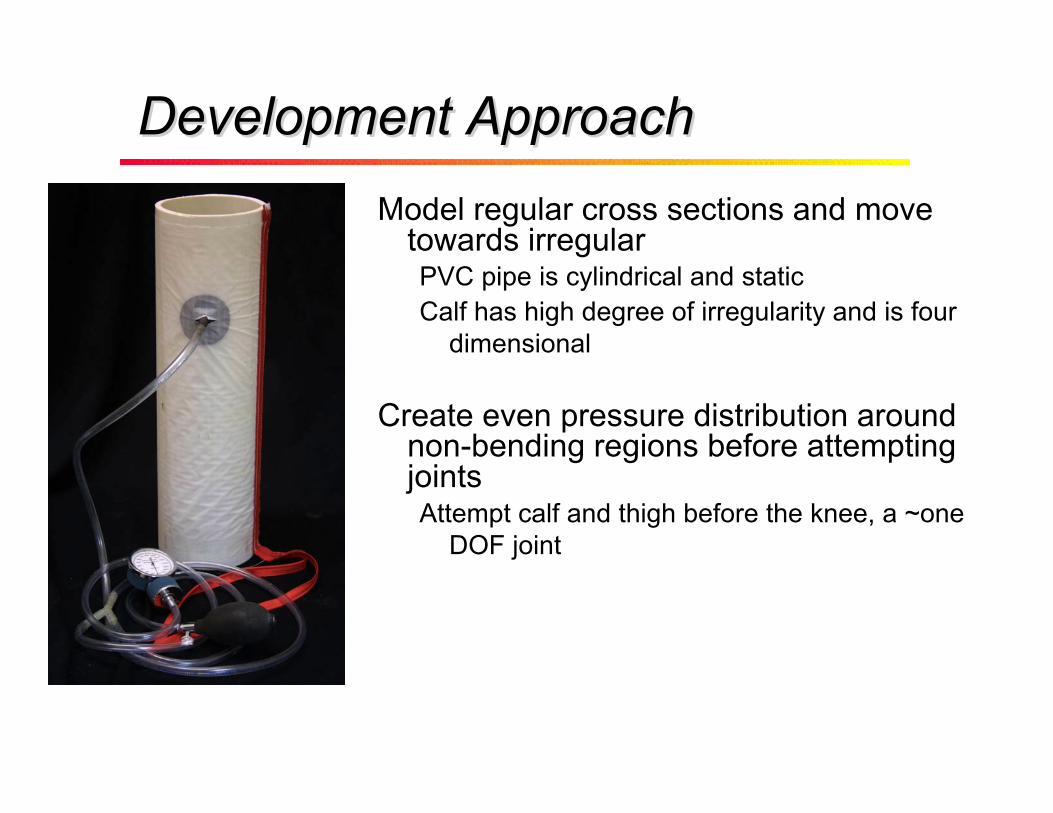
Development ApproachDevelopment Approach
Model regular cross sections and movetowards irregularPVC pipe is cylindrical and staticCalf has high degree of irregularity and is four
dimensional
Create even pressure distribution aroundnon-bending regions before attemptingjointsAttempt calf and thigh before the knee, a ~one
DOF joint
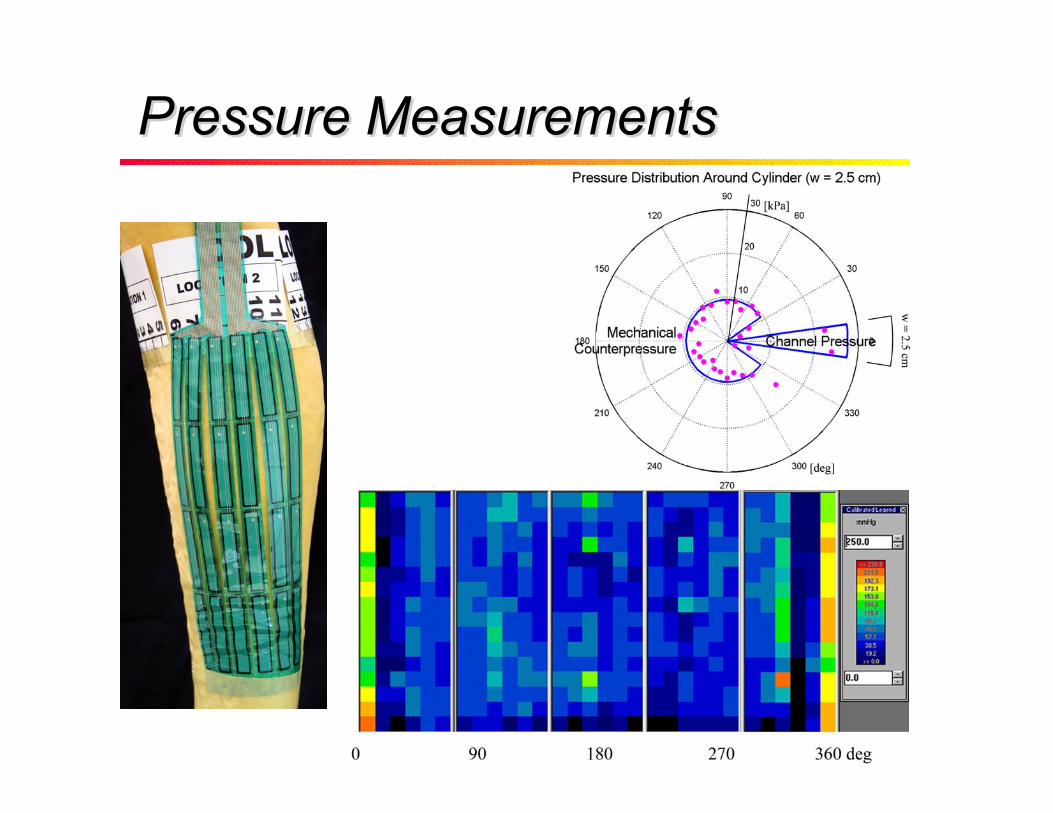
Pressure MeasurementsPressure Measurements

Results for CylinderResults for Cylinder

MCP Concept ConstructionMCP Concept Construction

Experimental VerificationExperimental Verification

Pressure VerificationPressure Verification
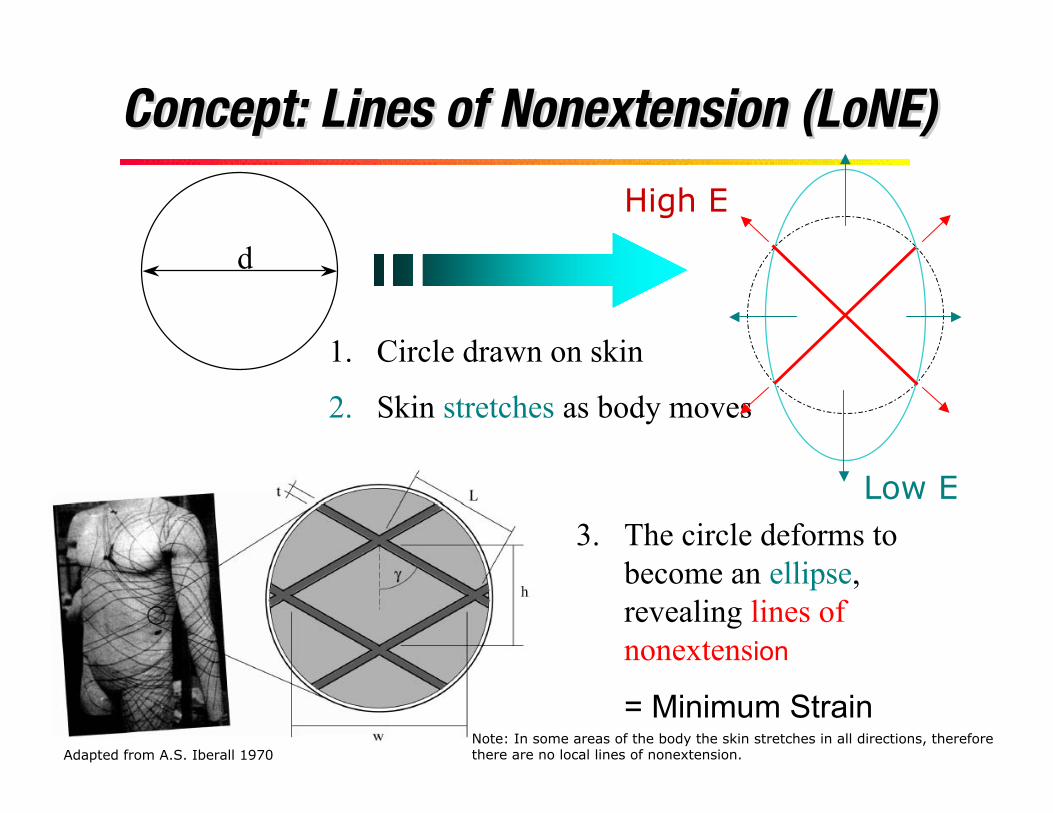
Concept: Lines of Nonextension (LoNE)Concept: Lines of Nonextension (LoNE)
d
1. Circle drawn on skin
2. Skin stretches as body moves
3. The circle deforms tobecome an ellipse,revealing lines ofnonextension
= Minimum StrainAdapted from A.S. Iberall 1970
High E
Low E
Note: In some areas of the body the skin stretches in all directions, thereforethere are no local lines of nonextension.
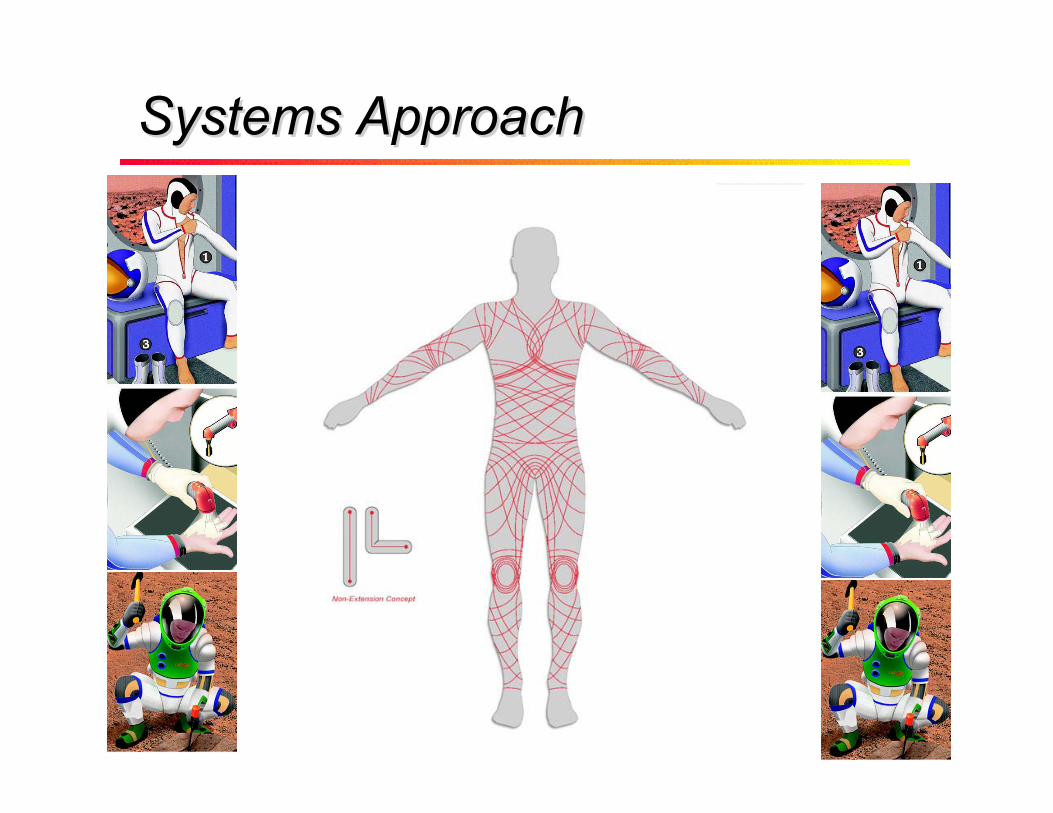
Systems ApproachSystems Approach

EVA Systems Engineering ApproachEVA Systems Engineering Approach
Exploration Systems must work in many different environments
ßThermal:ßLunar Day - active cooling (Apollo heritage)ßLunar Night - active heating (EMU gloves)Why carry around both systems all the time when each thermalenvironment lasts two weeks?
ßImpact:ßRiding in a vehicle or working at a digging site, can use parasol-likeWhipple shield (like sunshades in the desert.)ßDon’t need bulk and weight of shielding inside a cave!
ßPressurization:ßLook at pressurization as one of many EVA subsystemsßMinimizing the size of the pressure system outer envelope maximizesthe flexibility for decoupling other systems.ßMotivation for MCP, along with maneuverability and safety

Example (Pressurization):
Junction to TorsoThigh
Leg Non-moving Parts CalfKnee
Moving Parts (joints) Ankle
Pressure production for non-moving partspotentially different from flexing joints.
Boot is a separate system. (Member of team worked for Reebok.)
Need to develop subsystem junctions (interface problem).
Systems Approach (cont.)

Plans for Cost AnalysisPlans for Cost Analysis• Actual Bio-Suit system to be developed is too far in the future for useful bottom-up cost analysis• Look at current EVA System: analyze according to areas where new Bio-Suit Systems can impact total utilization costs
•Inspection•Maintenance•Reparability•Safety (# of backups)•Flexibility•Extensibility•Ability to incorporate new technology (continuous upgradeability)•Training (ease and intuitiveness of use)
• Analyze current systems cost: NASA cooperation• Would be useful to get insight into NASA and contractor analyses of the costs of future suit designs
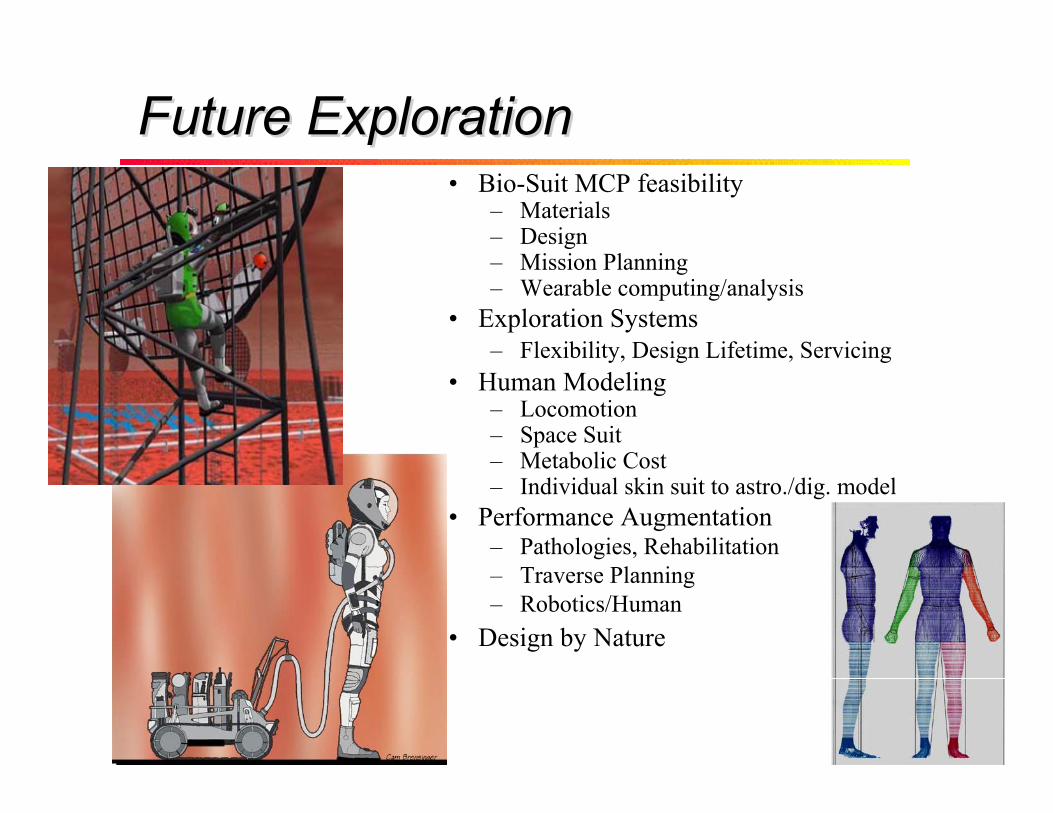
Future ExplorationFuture Exploration• Bio-Suit MCP feasibility
– Materials– Design– Mission Planning– Wearable computing/analysis
• Exploration Systems – Flexibility, Design Lifetime, Servicing
• Human Modeling– Locomotion– Space Suit– Metabolic Cost– Individual skin suit to astro./dig. model
• Performance Augmentation– Pathologies, Rehabilitation– Traverse Planning– Robotics/Human
• Design by Nature

ReferencesReferencesAnnis, J.F., and Webb, P., “Development of a Space Activity Suit,” NASA Contractor Report CR-1892, Webb Associates, Yellow Springs, Ohio, 1971.Carr, C.E., Hodges, K.V. Hodges, Newman, D.J., “Geologic Traverse Planning for Planetary EVA”, AIAA and SAE International Conference on Environmental Systems
(ICES 2003), Vancouver , B.C., Canada, July 2003.
Clapp, W., “Design and Testing of an Advanced Spacesuit Glove,” Massachusetts Institute of Technology, Cambridge, MA, 1983.Compton, R.R., Geology in the Field, John Wiley and Sons, New York, New York, 1985.
Connors, Mary M., Eppler, Dean B., and Morrow, Daniel G., Interviews with the Apollo Lunar Surface Astronauts in Support of Planning for EVA Systems Design, AmesResearch Center, National Aeronautics and Space Administration, 1994.
Frazer, A. L., Pitts, B. M., Schmidt, P. B., Hoffman, J. A. and Newman, D. J., “Astronaut Performance: Implications for Future Spacesuit Design”, 53rd InternationalAstronautical Congress, Paper No. IAC-02-6.5.03, Houston,TX, October 2002.
Hodgson, E. “Chameleon Suit”, NIAC Phase II, 2003.Iberall, A.S., “Development of a Full Pressure Altitude Suit,” WADC Technical Report 58-236, Wright Air Development Center, Wright-Patterson Air Force Base, Ohio,
June 1958.Iberall, A.S., “The Experimental Design of a Mobile Pressure Suit,” Journal of Basic Engineering, June 1970. pp. 251-264Iberall, A.S., “The Use of Lines of Nonextension to Improve Mobility in Full-Pressure Suits,” AMRL-TR-64-118. Aerospace Medical Research Laboratories, Wright-
Patterson Air Force Base, Ohio 1964.Jones, E.M., Apollo Lunar Surface Journal, http://www.hq.nasa.gov/office/pao/History/alsj/frame.html.
Kieffer, H.H., Jakosky, B.M., Snyder, C.W., Matthews, M.S. (editors), Mars, University of Arizona Press, Tucson, Arizona, 1992.
Kosloski, L., US Space Gear: Outfitting the Astronaut, Smithsonian Institute Press, Washington, DC, 1994Kosmo, Joseph, and Ross, Amy, Results and Findings of the Representative Planetary Surface EVA Deployment Task Activities, Flagstaff, Arizona (CTSD-ADV-470),
National Aeronautics and Space Administration, Crew and Thermal Systems Division, Lyndon B. Johnson Space Center, Houston, Texas, 2000.
Madden, Peter G., Polyprole actuators: modeling and performance, MIT, March 2001
Midé Technologies, Piezoelectric and SMA expert consultants.
Newman, D.J., “Life in Extreme Environments: How Will Humans Perform on Mars?” ASGSB Gravitational and Space Biology Bulletin, 13(2): 35-47, June 2000.Pitts, B., Brensinger, C., Saleh, J., Carr, C., Schmidt, P., Newman, D., “Astronaut Bio-Suit for Exploration Class Missions,” NIAC Phase I Final Report, Cambridge,
Massachusetts Institute of Technology, 2001.Saleh, J.H., Hastings, D.E., and D.J. Newman, "Flexibility in System Design and Implications for Aerospace Systems," Acta Astronautica, (accepted, in press) 2003.Saleh, J.H., Hastings, D.E., and D.J. Newman, "Weaving Time into System Architecture: Satellite Cost per Operational Day and Optimal Design Lifetime," Acta
Astronautica, (accepted, in press) 2003.Santee, W.R., Allison W.F., Blanchard, L.A, and Small, M.G., “A Proposed Model for Load Carriage on Sloped Terrain”, Aviation, Space, and Environmental Medicine,
Vol. 72, No. 6, June 2001.Schmidt, P., “An Investigation of Space Suit Mobility with Applications to EVA Operations,” Doctoral Thesis, Massachusetts Institute of Technology, Cambridge, MA,
2001.Stone, R.W., Man’s Motor Performance Including Acquisition of Adaptation Effects in Reduced Gravity Environments, National Aeronautics and Space Administration,
Langley Research Center, Hampton, Virginia, 1974.
Trotti and Associates, Inc., Extreme environment design consultants.
Webb, Paul, and Annis, J.F., “The Principle of the Space Activity Suit,” NASA Contractor Report CR-973, Webb Associates, Yellow Springs, Ohio, 1967.Webb, Paul, “The Space Activity Suit: An Elastic Leotard for Extravehicular Activity,” Aerospace Medicine, April 1968. pp. 376-383.Workshop notes from Science and the Human Exploration of Mars, Goddard Space Flight Center, January 11-12, 2001.
URLs: Aspen Systems http://www.aspensystems.com, Natick Soldier Center http://www.sbccom.army.mil/products/cie/Electrospinlacing.htm
Questions?Questions?
Thanks to