an adaptive algorithm for dealing with sparse ...meade/papers/meade stat talk7.pdf · an adaptive...
TRANSCRIPT
An Adaptive Algorithm for Dealing withSparse Multidimensional Data Sets
Presented to
Department of Statistics
October 18, 2004
Prof. Andrew MeadeDept. MEMS
Presentation Outline
•Background
• Approach
• Performance
•Applications
•Conclusions/Future Work
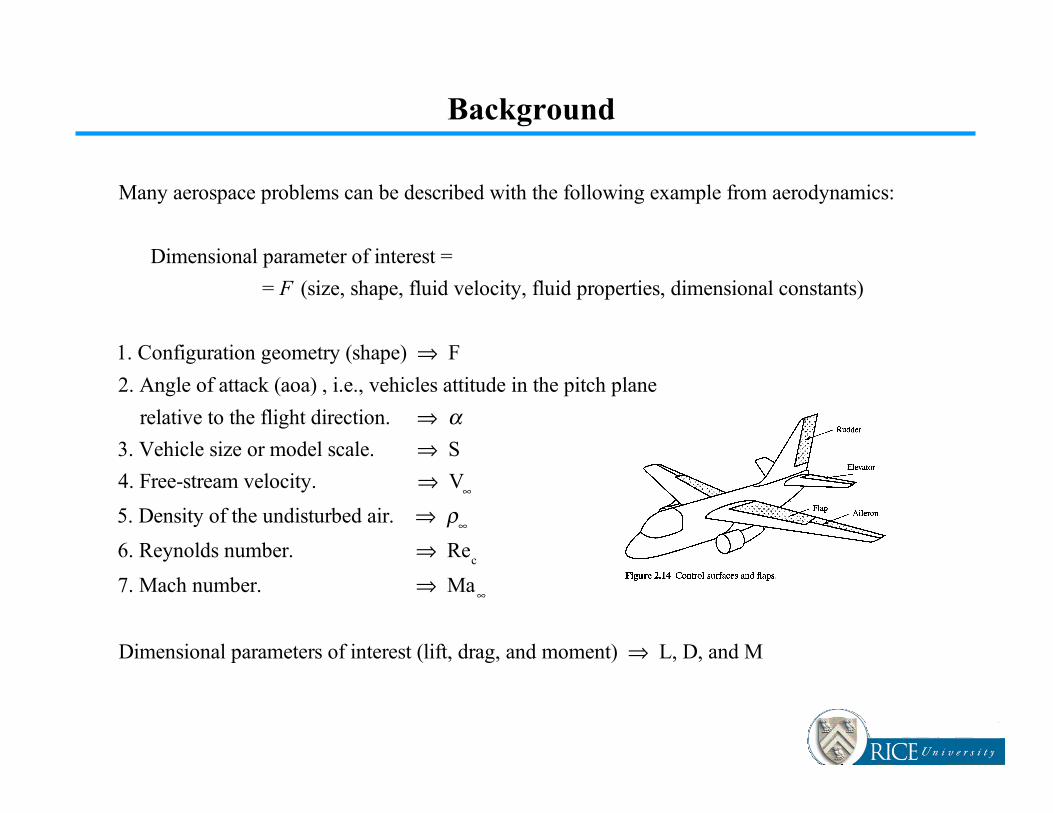
Many aerospace problems can be described with the following example from aerodynamics:
Dimensional parameter of interest =
= F (size, shape, fluid velocity, fluid properties, dimensional constants)
1. Configuration geometry (shape) ⇒ F
2. Angle of attack (aoa) , i.e., vehicles attitude in the pitch plane
relative to the flight direction. ⇒ α3. Vehicle size or model scale. ⇒ S
4. Free-stream velocity. ⇒ V∞
5. Density of the undisturbed air. ⇒ ρ∞
6. Reynolds number. ⇒ Rec
7. Mach number. ⇒ Ma∞
Dimensional parameters of interest (lift, drag, and moment) ⇒ L, D, and M
Background

We define the dynamic pressure as q∞ = 1
2ρ∞V∞
2 ,
the Reynolds number based on the chord as Rec =
ρ∞V∞c
µ∞
,
the freestream Mach number as Ma∞ =V∞
a∞
,
and the reference area (planform area) as S = bc .
Background
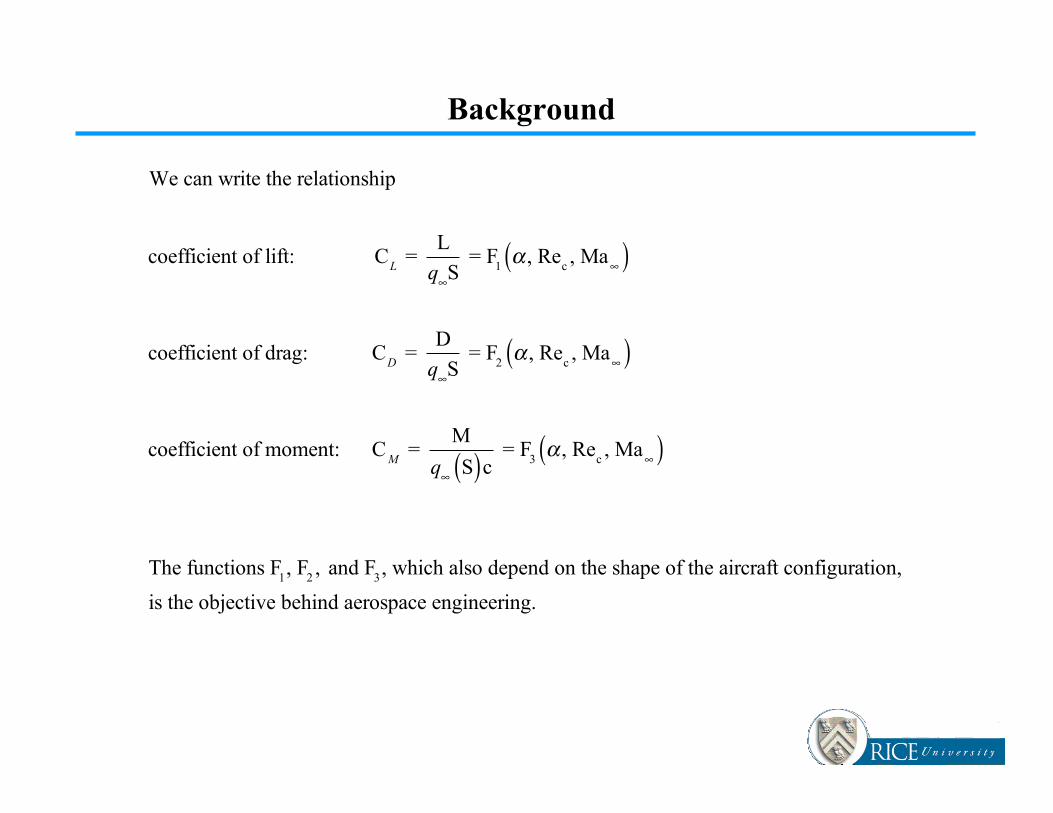
We can write the relationship
coefficient of lift: CL =
L
q∞S = F
1α , Re
c, Ma∞( )
coefficient of drag: CD
= D
q∞S = F
2α , Re
c, Ma∞( )
coefficient of moment: CM
= M
q∞ S( )c = F3α , Re
c, Ma∞( )
The functions F1, F
2, and F
3, which also depend on the shape of the aircraft configuration,
is the objective behind aerospace engineering.
Background
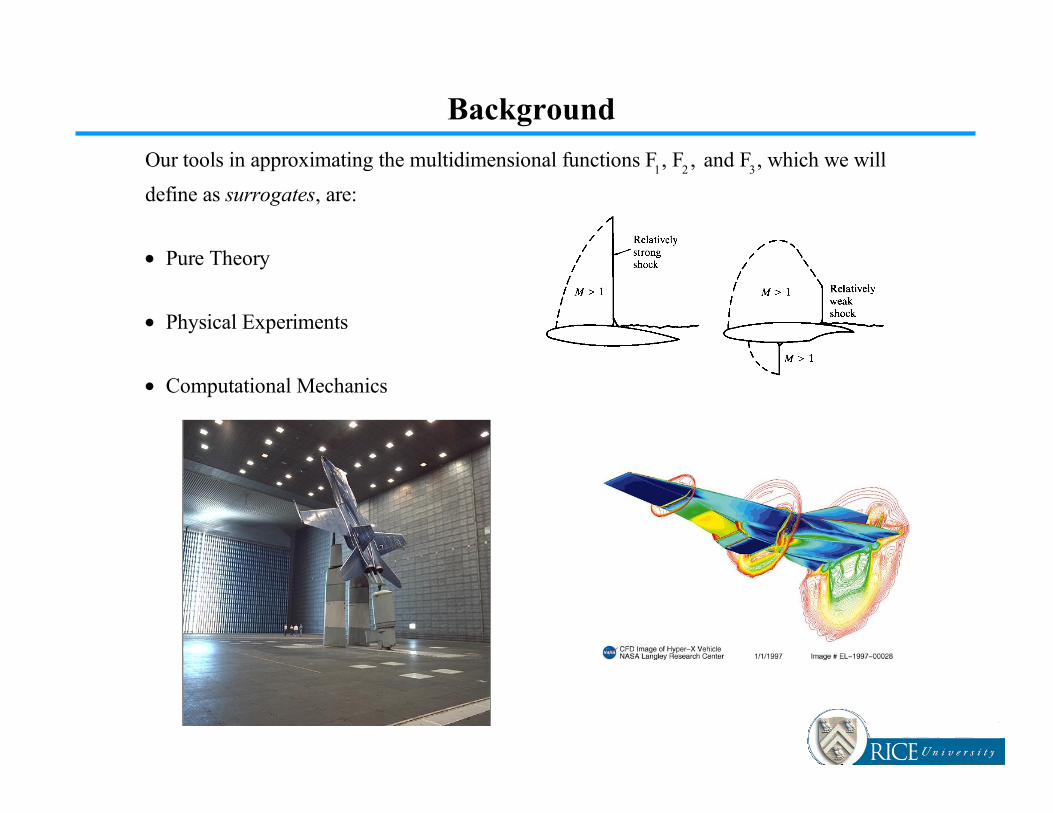
Our tools in approximating the multidimensional functions F1, F
2, and F
3, which we will
define as surrogates, are:
• Pure Theory
• Physical Experiments
• Computational Mechanics
Background
Background
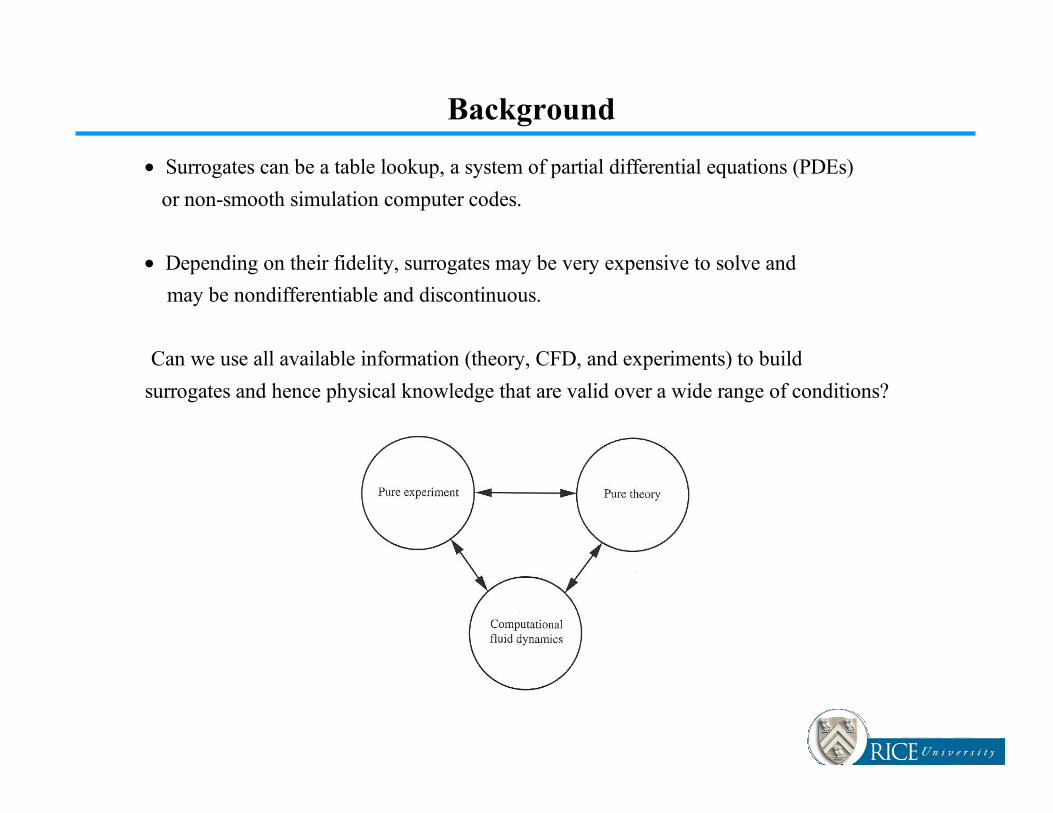
• Surrogates can be a table lookup, a system of partial differential equations (PDEs)
or non-smooth simulation computer codes.
• Depending on their fidelity, surrogates may be very expensive to solve and
may be nondifferentiable and discontinuous.
Can we use all available information (theory, CFD, and experiments) to build
surrogates and hence physical knowledge that are valid over a wide range of conditions?
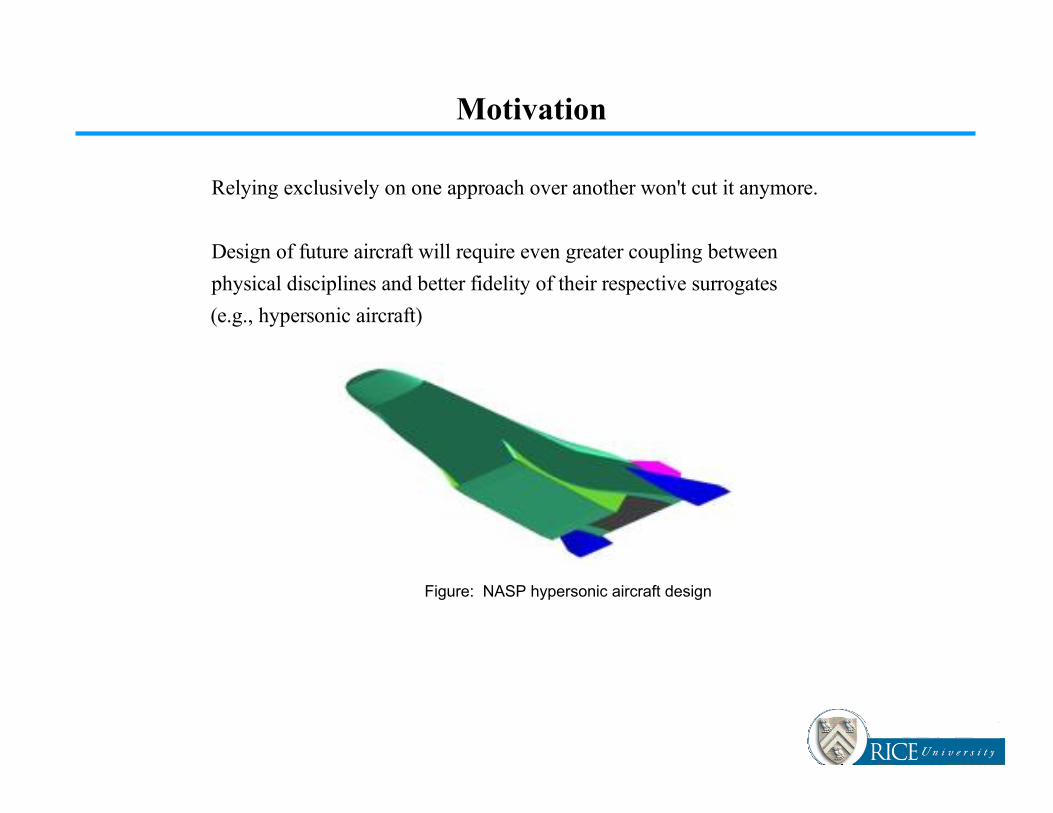
Figure: NASP hypersonic aircraft design
Motivation
Relying exclusively on one approach over another won't cut it anymore.
Design of future aircraft will require even greater coupling between
physical disciplines and better fidelity of their respective surrogates
(e.g., hypersonic aircraft)
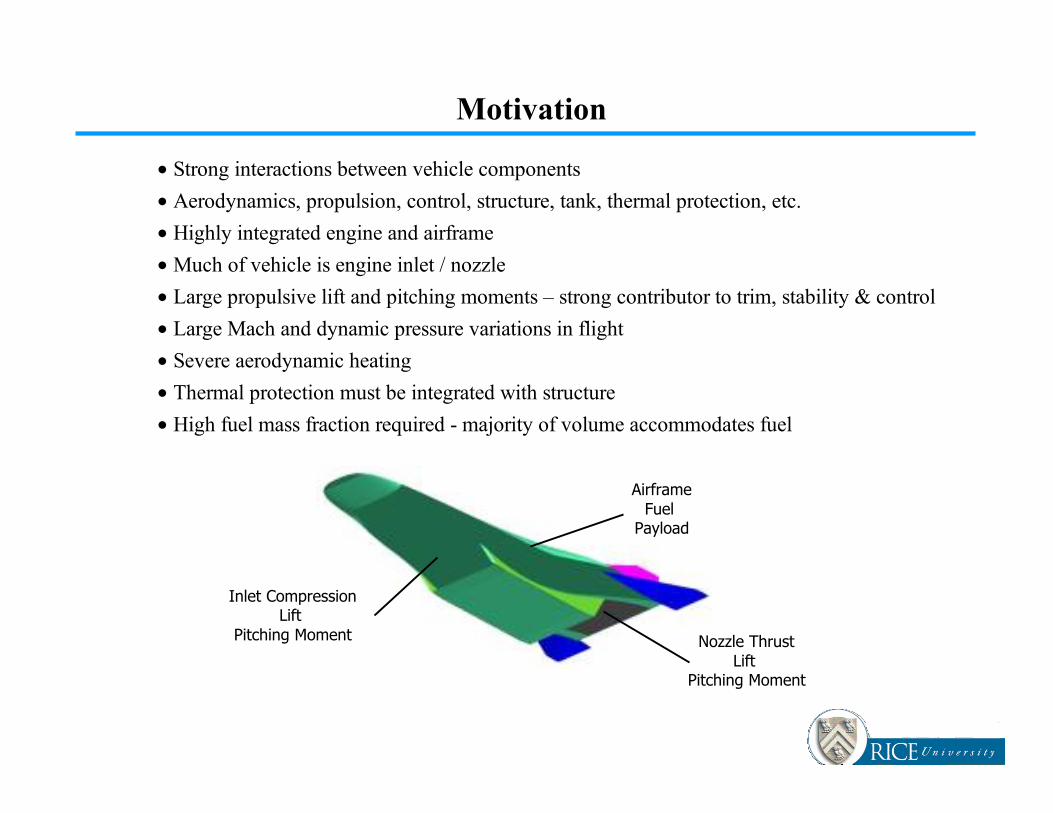
Inlet CompressionLift
Pitching Moment Nozzle ThrustLift
Pitching Moment
AirframeFuel
Payload
Motivation
• Strong interactions between vehicle components
• Aerodynamics, propulsion, control, structure, tank, thermal protection, etc.
• Highly integrated engine and airframe
• Much of vehicle is engine inlet / nozzle
• Large propulsive lift and pitching moments – strong contributor to trim, stability & control
• Large Mach and dynamic pressure variations in flight
• Severe aerodynamic heating
• Thermal protection must be integrated with structure
• High fuel mass fraction required - majority of volume accommodates fuel
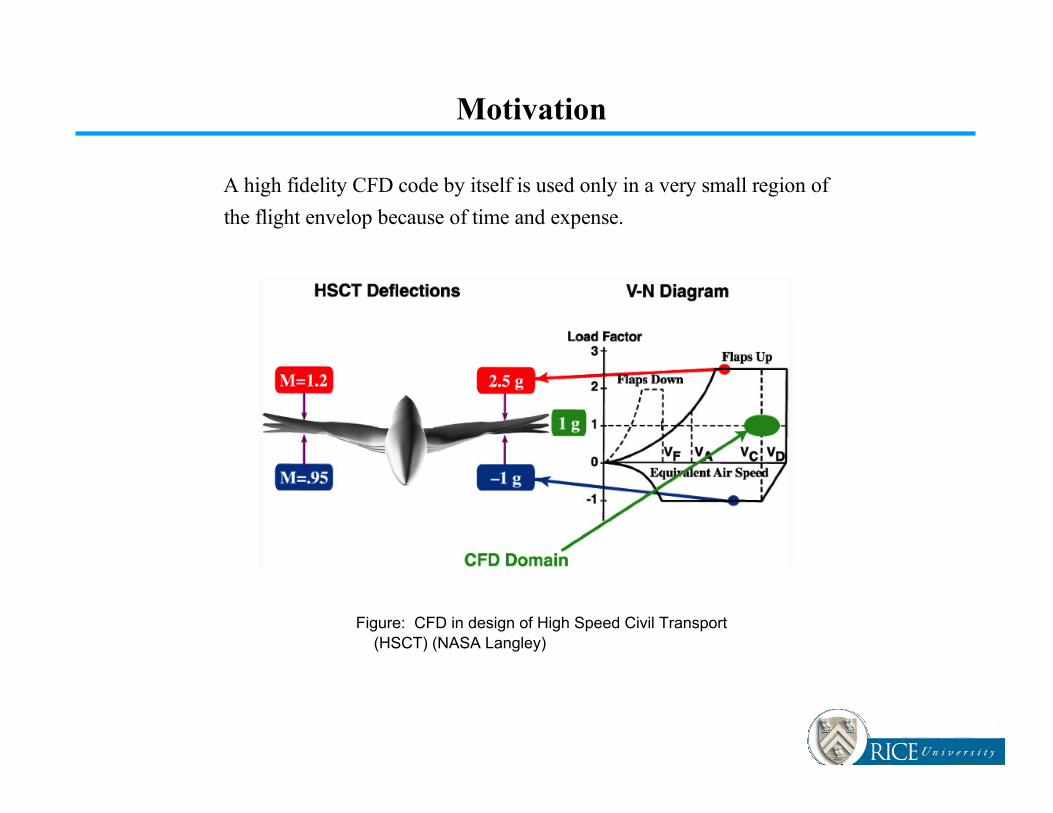
Figure: CFD in design of High Speed Civil Transport(HSCT) (NASA Langley)
A high fidelity CFD code by itself is used only in a very small region of
the flight envelop because of time and expense.
Motivation
• In addition, we must admit that there is no “universal” turbulence model in fluid dynamics.
• There are just too many fine details in the flow to simulate it with any
computational efficiency (Direct Numerical Simulation).
• The nearest we have is Large Eddy Simulation (LES) which is computationally costly.
• No single turbulence model predicts all textures of a moderately complex flow.
Motivation
Motivation

Figure: Hemsch wing-body-nacelle wind tunnelmodel for the AIAA Drag Prediction Workshop(NASA Langley)
Motivation
Motivation
I believe we can take advantage of theory, physical experiments and computational
methods, using tools from scattered data approximation and Tikhnov Regularization (TR)
Motivation
Approach
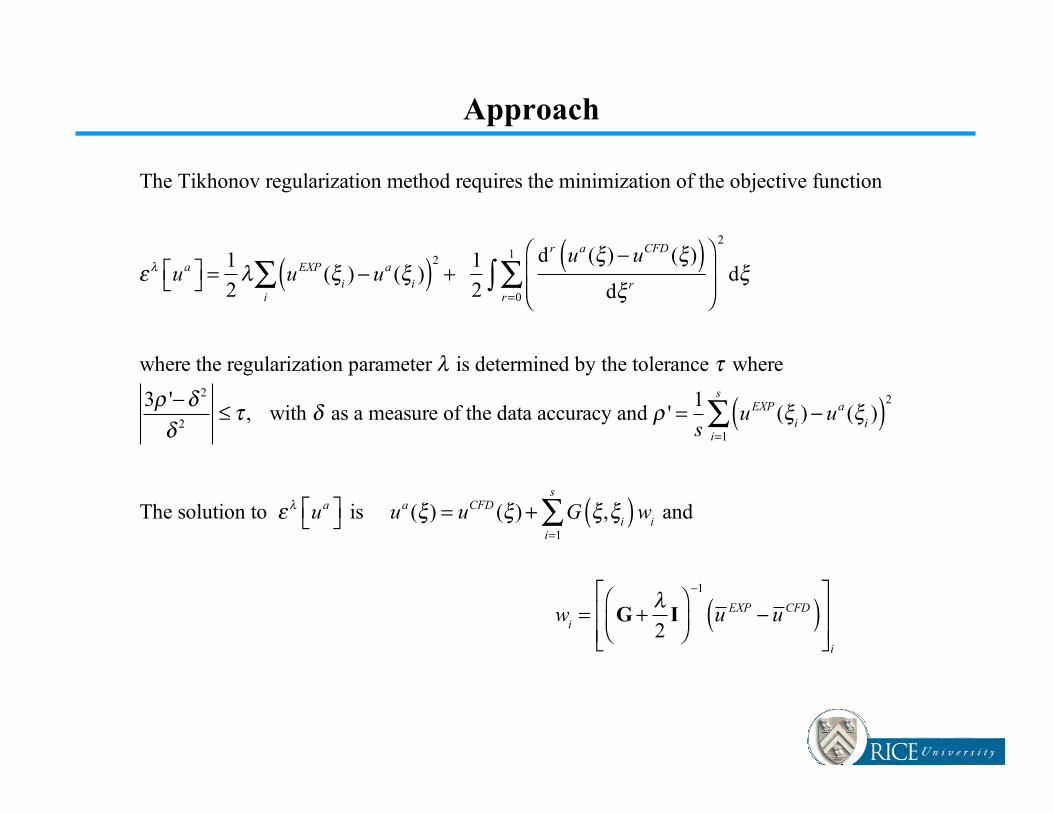
The Tikhonov regularization method requires the minimization of the objective function
ελ ua⎡⎣ ⎤⎦ =1
2λ uEXP (ξ
i)− ua (ξ
i)( )2
+i∑
1
2
dr ua (ξ)− uCFD (ξ)( )dξ r
⎛
⎝⎜⎜
⎞
⎠⎟⎟
2
dξr=0
1
∑∫
where the regularization parameter λ is determined by the tolerance τ where
3ρ '−δ 2
δ 2≤ τ , with δ as a measure of the data accuracy and ρ ' = 1
suEXP (ξ
i)− ua (ξ
i)( )2
i=1
s
∑
The solution to ελ ua⎡⎣ ⎤⎦ is ua (ξ) = uCFD (ξ)+ G ξ,ξi( )w
ii=1
s
∑ and
wi= G + λ
2I
⎛⎝⎜
⎞⎠⎟
−1
u EXP − u CFD( )⎡
⎣⎢⎢
⎤
⎦⎥⎥
i
Approach
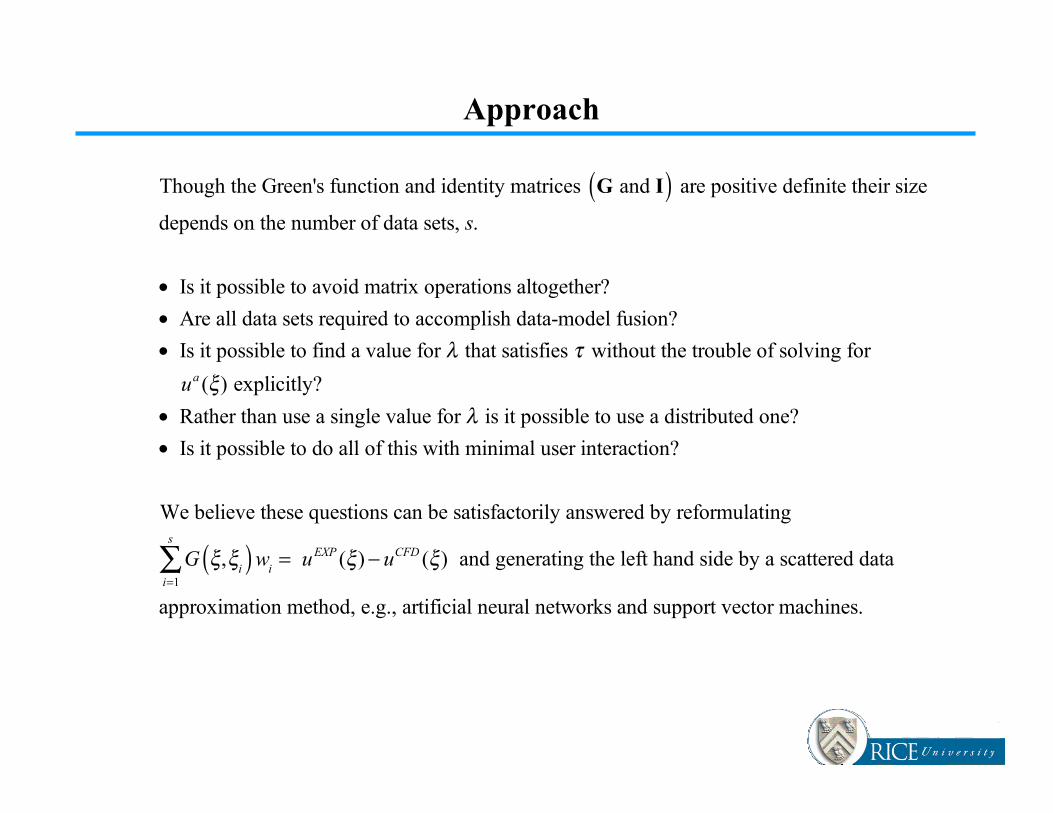
Though the Green's function and identity matrices G and I( ) are positive definite their size
depends on the number of data sets, s.
• Is it possible to avoid matrix operations altogether?
• Are all data sets required to accomplish data-model fusion?
• Is it possible to find a value for λ that satisfies τ without the trouble of solving for
ua (ξ) explicitly?
• Rather than use a single value for λ is it possible to use a distributed one?
• Is it possible to do all of this with minimal user interaction?
We believe these questions can be satisfactorily answered by reformulating
G ξ,ξi( )w
ii=1
s
∑ = uEXP (ξ)− uCFD (ξ) and generating the left hand side by a scattered data
approximation method, e.g., artificial neural networks and support vector machines.

Approach
The Sequential Function Approximation (SFA) network is our approach to
scattered data approximation.
SFA is a variation of Orr's Forward Selection training method and
Platt's Resource Allocating network that seeks to inprove the computational efficiency
through the Method of Weighted Residuals (MWR).
rn(ξ ,σ
n,c
n) = u(ξ )− u
na (ξ )= u(ξ )− u
n−1a (ξ )− w
nh(σ
n,c
n)
= rn−1
− wnh
n
The objective is to determine wn, σ
n, and c
n that minimize the residual r
n. Through the
MWR we can reformulate the residual equation as a minimization problem,
Rn, R
n= R
n−1, R
n−1− 2w
nR
n−1,h
n+ w
n2 h
n,h
n

Approach
The solution for discrete data sets is the nonlinear minimization of
1−(r
n−1⋅H
n)2
(Hn⋅H
n)(r
n−1⋅r
n−1)
where σn, and c
n are unconstrained with w
n=
(Rn−1
⋅Hn)
(Hn⋅H
n)
.
The network parameters wn, σ
n, and c
n account for one network unit at the nth iteration.
With an initial σn is set, the algorithm begins and with the determination of w
n, σ
n, and c
n
a new basis function is allocated and rn is updated.
The iterative process continues until either a pre-determined tolerance is reached
max |rn−1
| ≤ τ( ) or n = s.
Approach
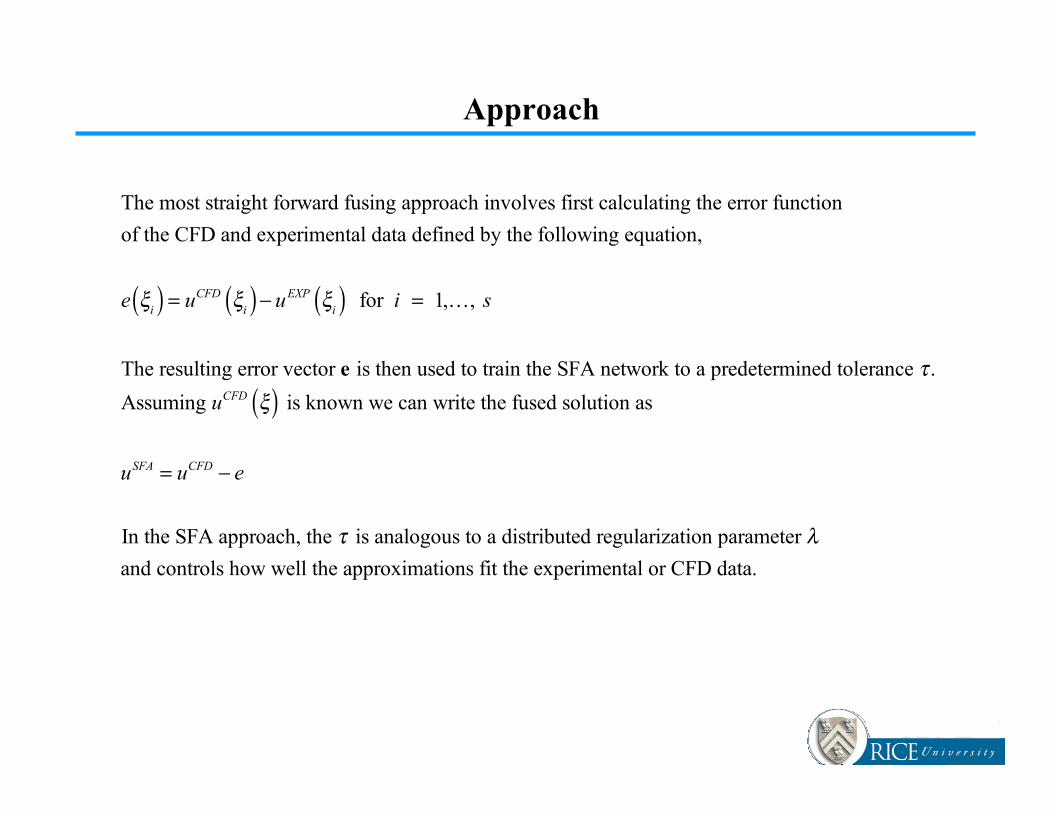
The most straight forward fusing approach involves first calculating the error function
of the CFD and experimental data defined by the following equation,
e ξi( ) = uCFD ξ
i( )− uEXP ξi( ) for i = 1,…, s
The resulting error vector e is then used to train the SFA network to a predetermined tolerance τ .
Assuming uCFD ξ( ) is known we can write the fused solution as
uSFA = uCFD − e
In the SFA approach, the τ is analogous to a distributed regularization parameter λand controls how well the approximations fit the experimental or CFD data.
Approach
This work follows from our efforts in manual and "hands-free" neural network
programming and meshfree finite element modeling.
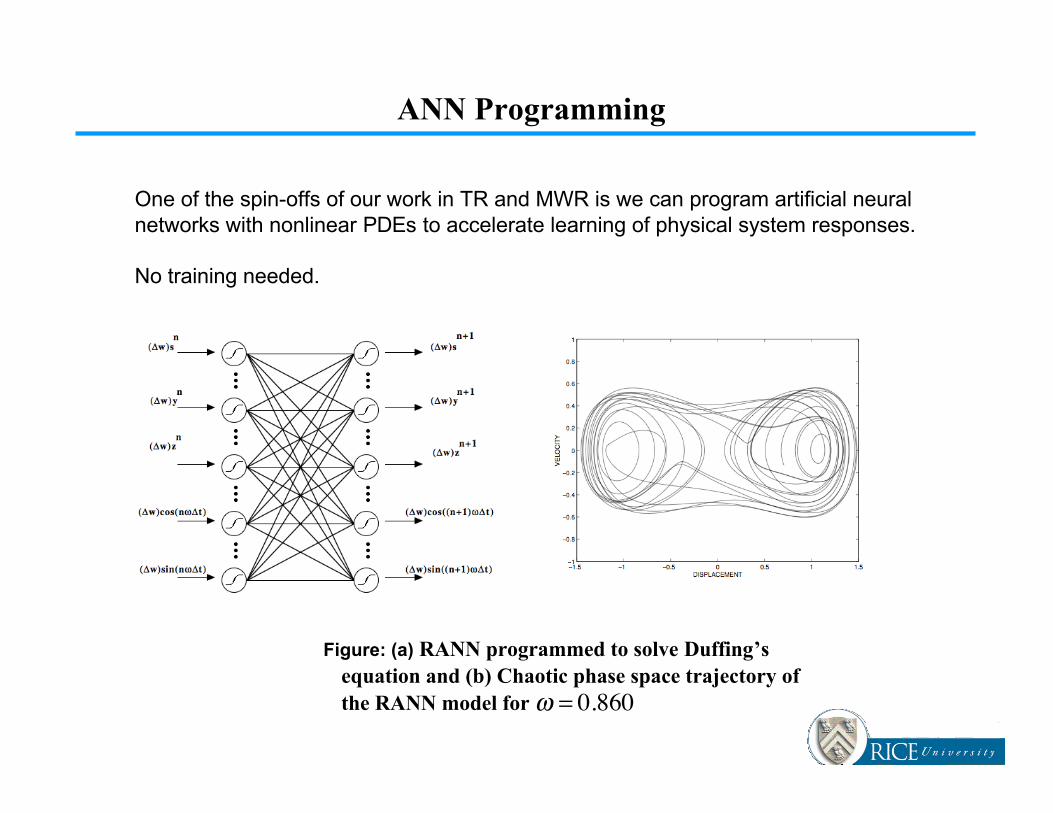
One of the spin-offs of our work in TR and MWR is we can program artificial neuralnetworks with nonlinear PDEs to accelerate learning of physical system responses.
No training needed.
Figure: (a) RANN programmed to solve Duffing’sequation and (b) Chaotic phase space trajectory ofthe RANN model for
�
ω = 0.860
ANN Programming
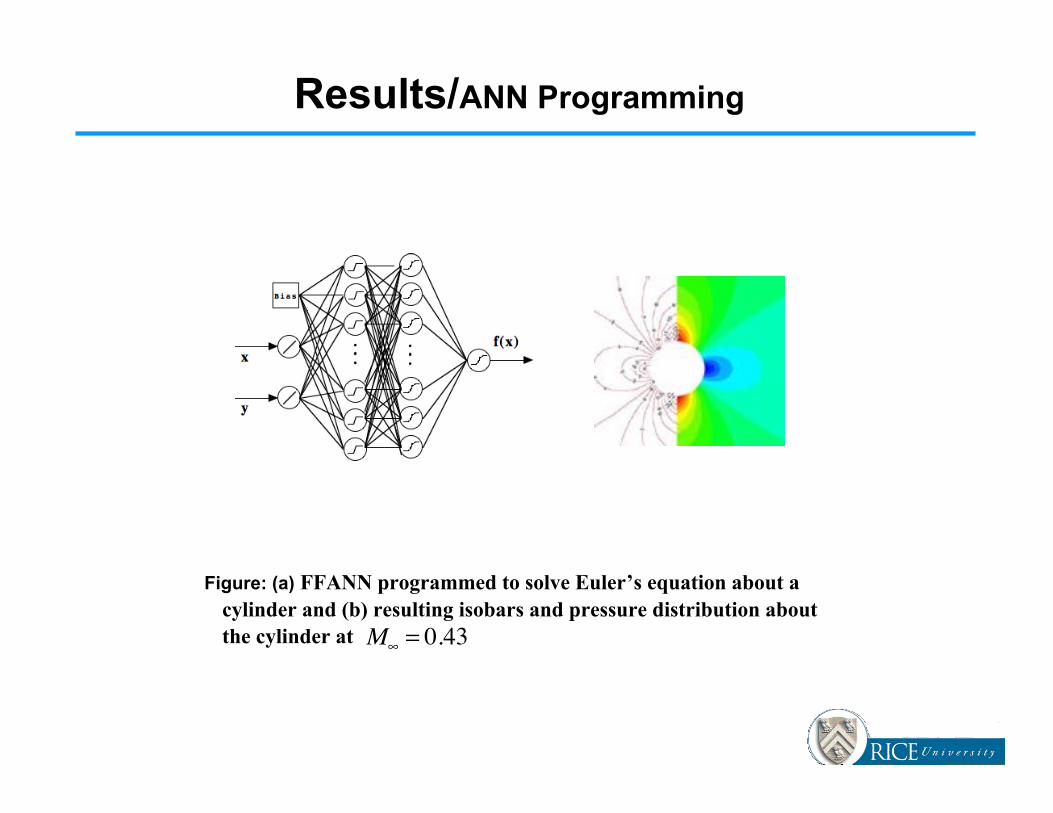
Results/ANN Programming
Figure: (a) FFANN programmed to solve Euler’s equation about acylinder and (b) resulting isobars and pressure distribution aboutthe cylinder at
�
M∞ = 0.43
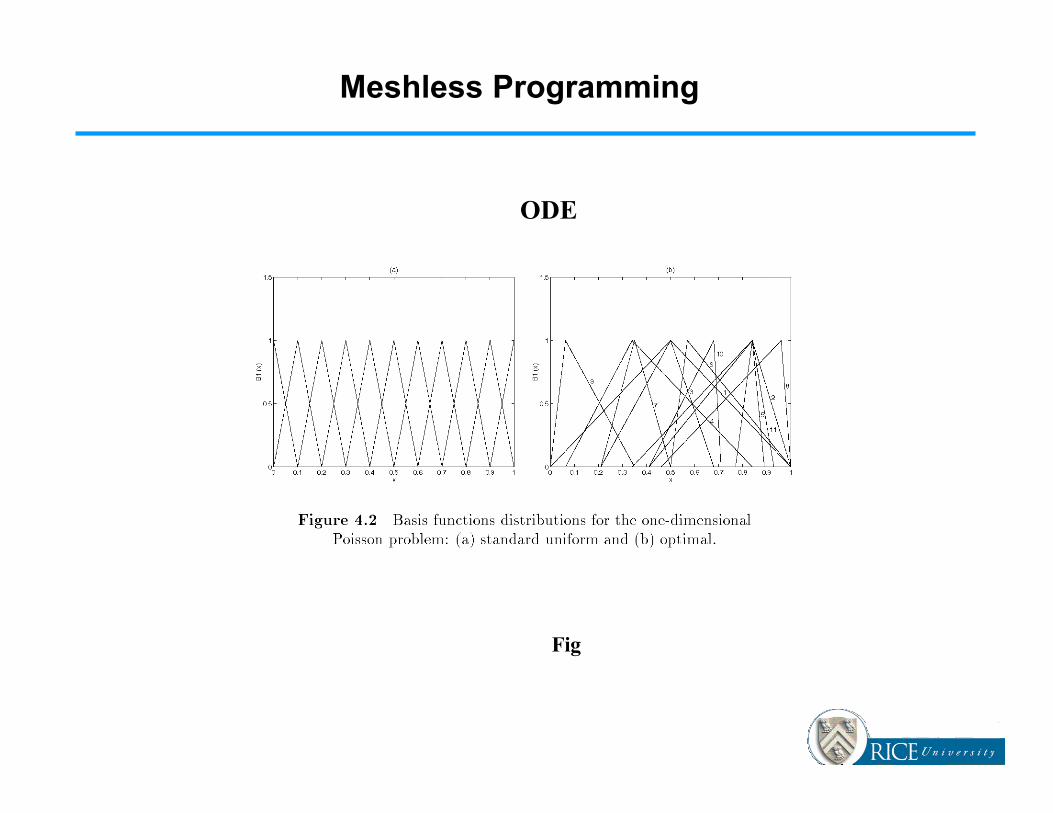
ODE
Fig
Meshless Programming
Meshless Programming

Function Approximation Test
2D exponential bases approximating an aligned and a skewed discontinuitywith (a) 1 basis and (b) 20 bases by OIA
Meshless Programming
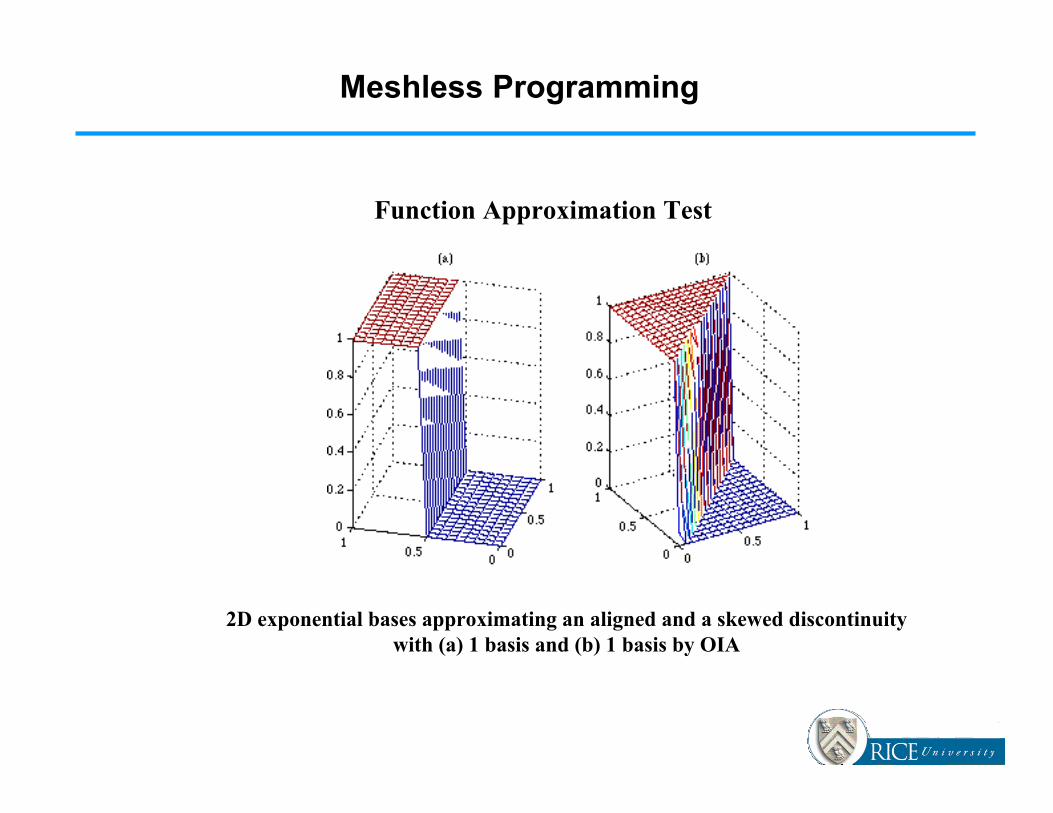
Function Approximation Test
2D exponential bases approximating an aligned and a skewed discontinuitywith (a) 1 basis and (b) 1 basis by OIA
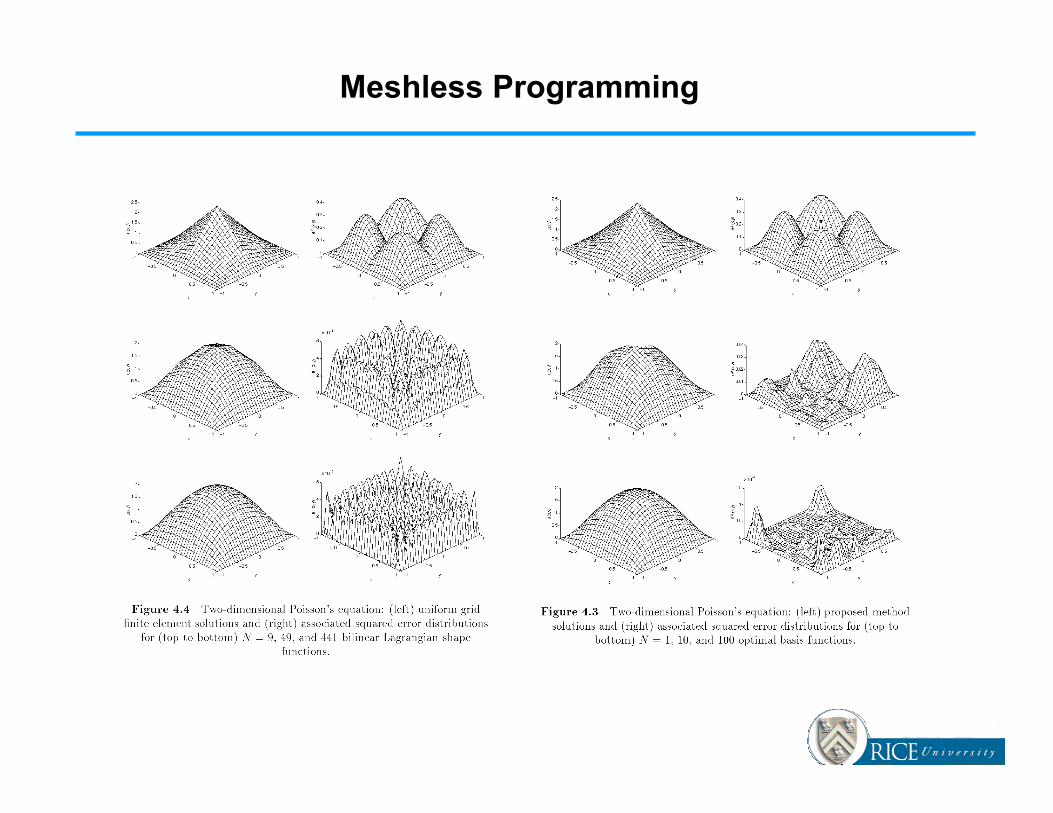
Meshless Programming

Discrete Ordinate Method (DOM) Thermal Radiation Problem
Non-dim. temp. approx. using 21 exp.bases by meshless method
Non-dim. temp. approx. using 40401finite volume bases
Meshless Programming
Performance
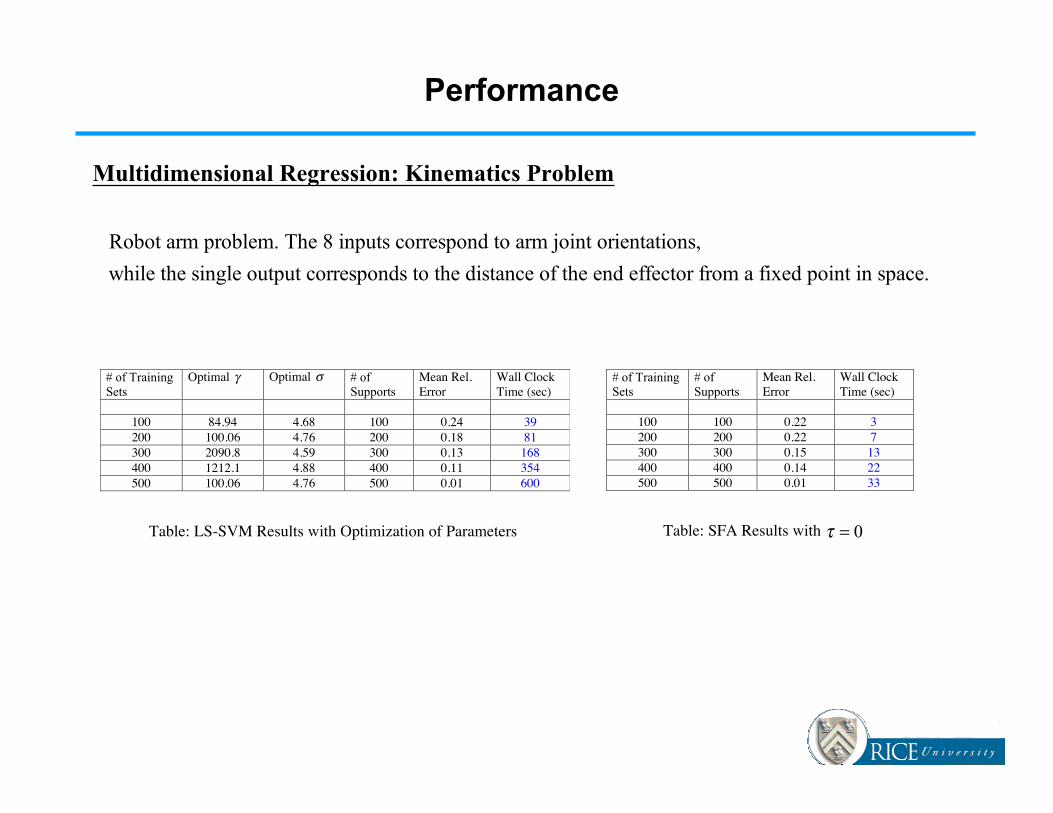
Multidimensional Regression: Kinematics Problem
Table: LS-SVM Results with Optimization of Parameters
Robot arm problem. The 8 inputs correspond to arm joint orientations,
while the single output corresponds to the distance of the end effector from a fixed point in space.
Table: SFA Results with
# of TrainingSets
Optimal γ Optimal σ # ofSupports
Mean Rel.Error
Wall ClockTime (sec)
100 84.94 4.68 100 0.24 39200 100.06 4.76 200 0.18 81300 2090.8 4.59 300 0.13 168400 1212.1 4.88 400 0.11 354500 100.06 4.76 500 0.01 600
# of TrainingSets
# ofSupports
Mean Rel.Error
Wall ClockTime (sec)
100 100 0.22 3200 200 0.22 7300 300 0.15 13400 400 0.14 22500 500 0.01 33
τ = 0
Performance
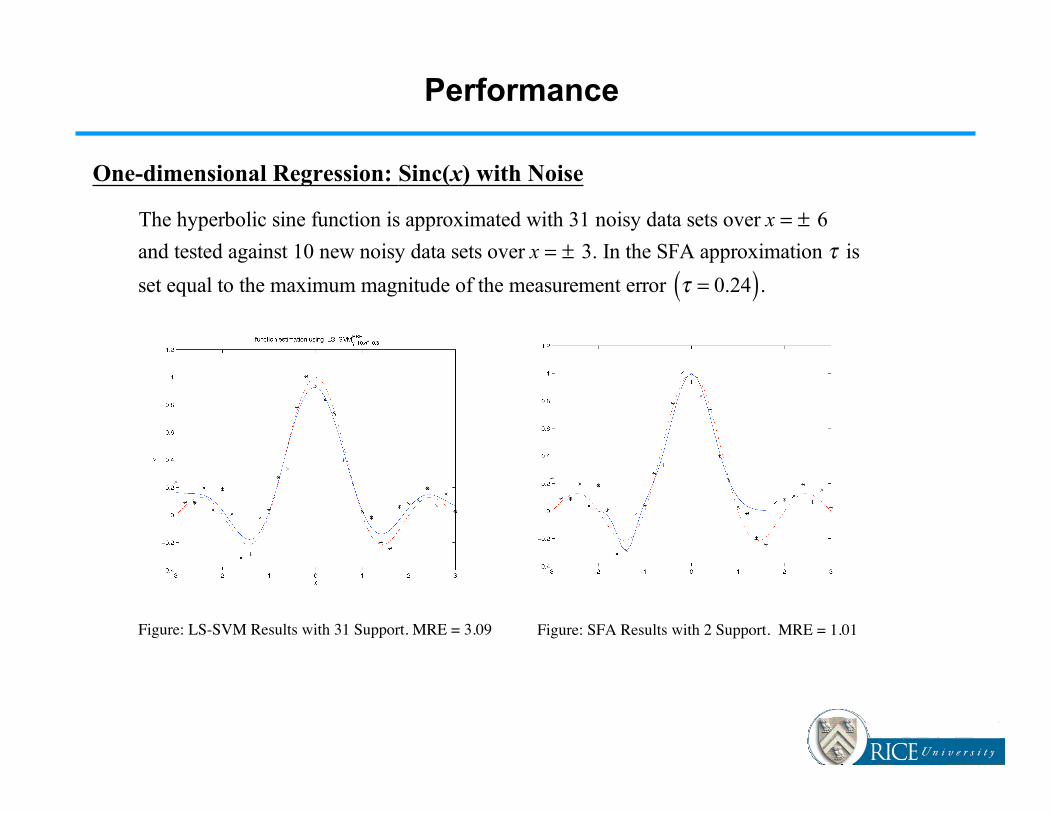
One-dimensional Regression: Sinc(x) with Noise
Figure: LS-SVM Results with 31 Support. MRE = 3.09
The hyperbolic sine function is approximated with 31 noisy data sets over x = ± 6
and tested against 10 new noisy data sets over x = ± 3. In the SFA approximation τ is
set equal to the maximum magnitude of the measurement error τ = 0.24( ).
Figure: SFA Results with 2 Support. MRE = 1.01
Performance
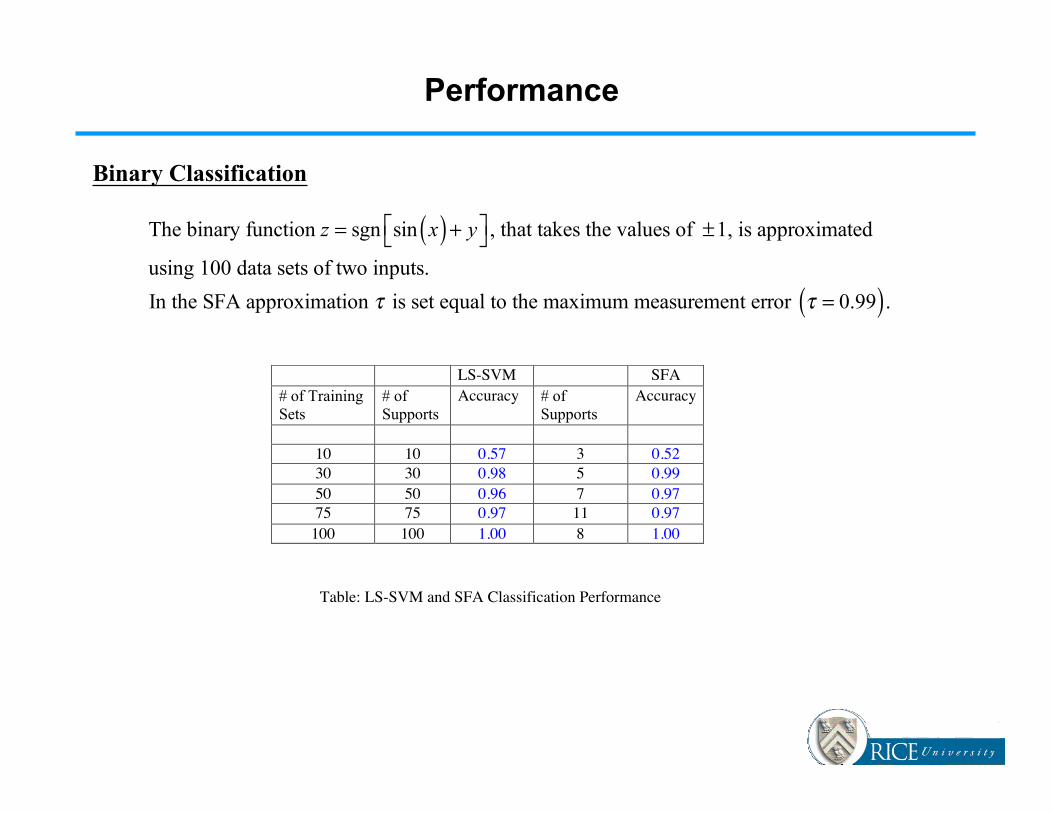
Binary Classification
Table: LS-SVM and SFA Classification Performance
The binary function z = sgn sin x( ) + y⎡⎣ ⎤⎦ , that takes the values of ±1, is approximated
using 100 data sets of two inputs.
In the SFA approximation τ is set equal to the maximum measurement error τ = 0.99( ).
LS-SVM SFA# of TrainingSets
# ofSupports
Accuracy # ofSupports
Accuracy
10 10 0.57 3 0.5230 30 0.98 5 0.9950 50 0.96 7 0.9775 75 0.97 11 0.97100 100 1.00 8 1.00
Performance
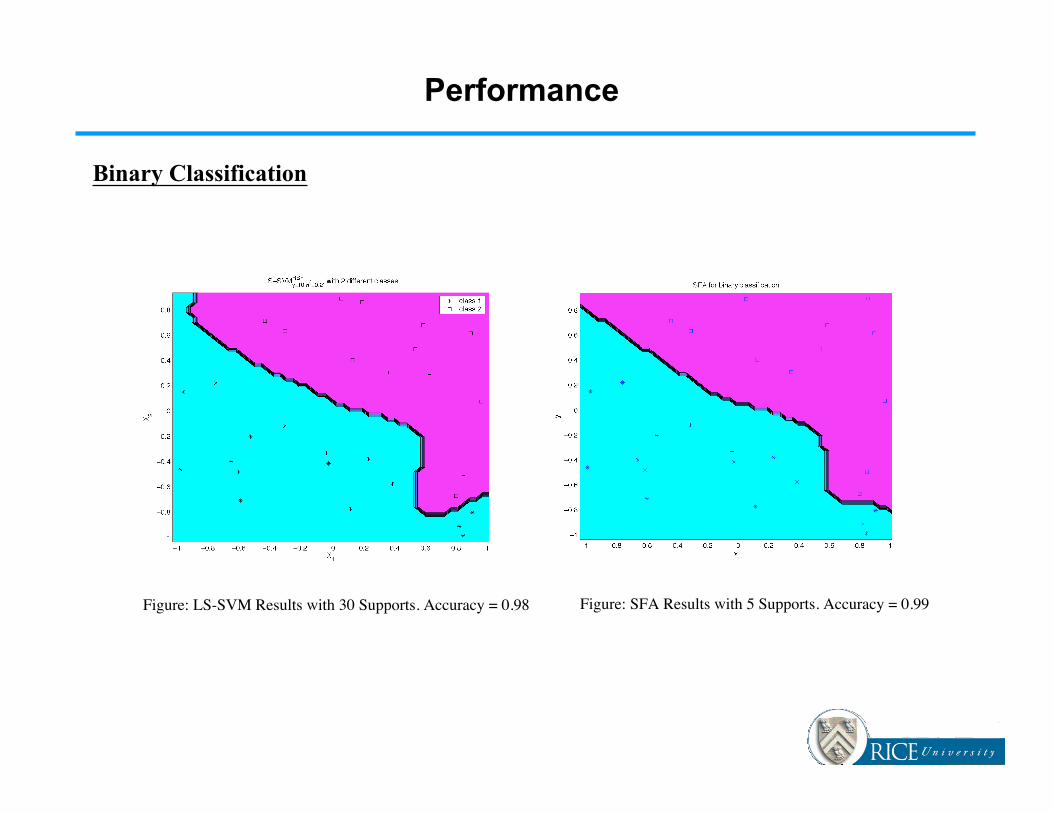
Binary Classification
Figure: LS-SVM Results with 30 Supports. Accuracy = 0.98 Figure: SFA Results with 5 Supports. Accuracy = 0.99
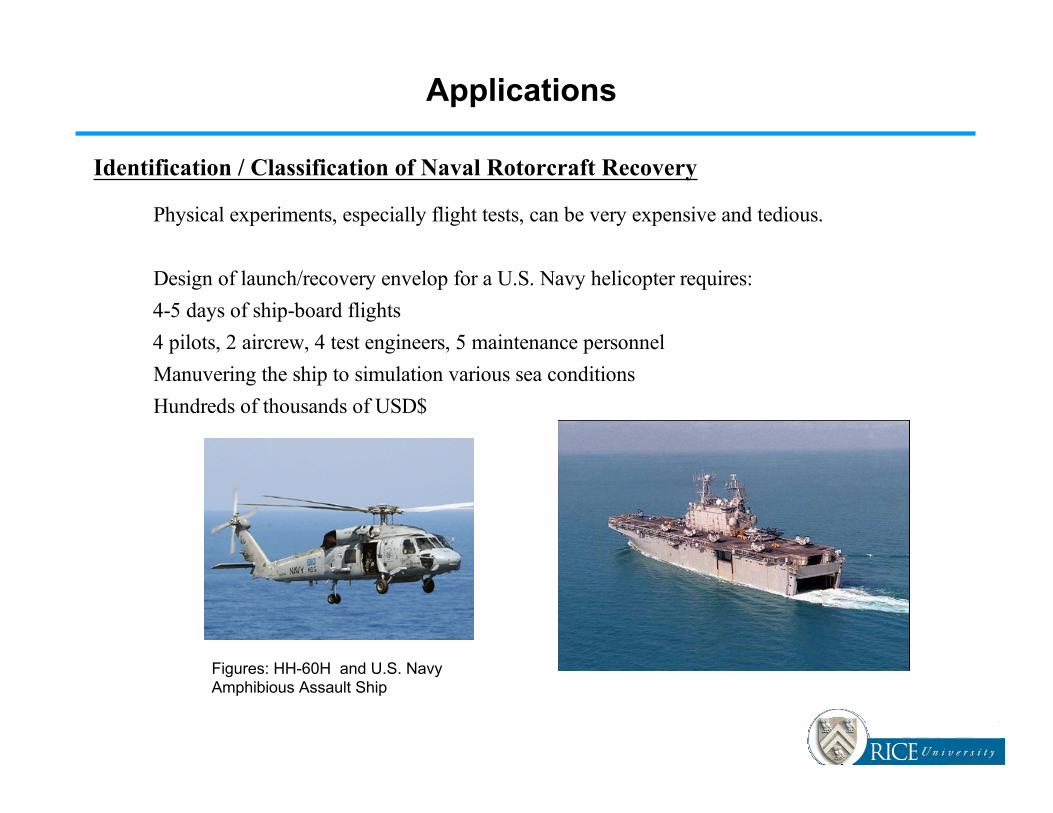
Figures: HH-60H and U.S. NavyAmphibious Assault Ship
Applications
Physical experiments, especially flight tests, can be very expensive and tedious.
Design of launch/recovery envelop for a U.S. Navy helicopter requires:
4-5 days of ship-board flights
4 pilots, 2 aircrew, 4 test engineers, 5 maintenance personnel
Manuvering the ship to simulation various sea conditions
Hundreds of thousands of USD$
Identification / Classification of Naval Rotorcraft Recovery
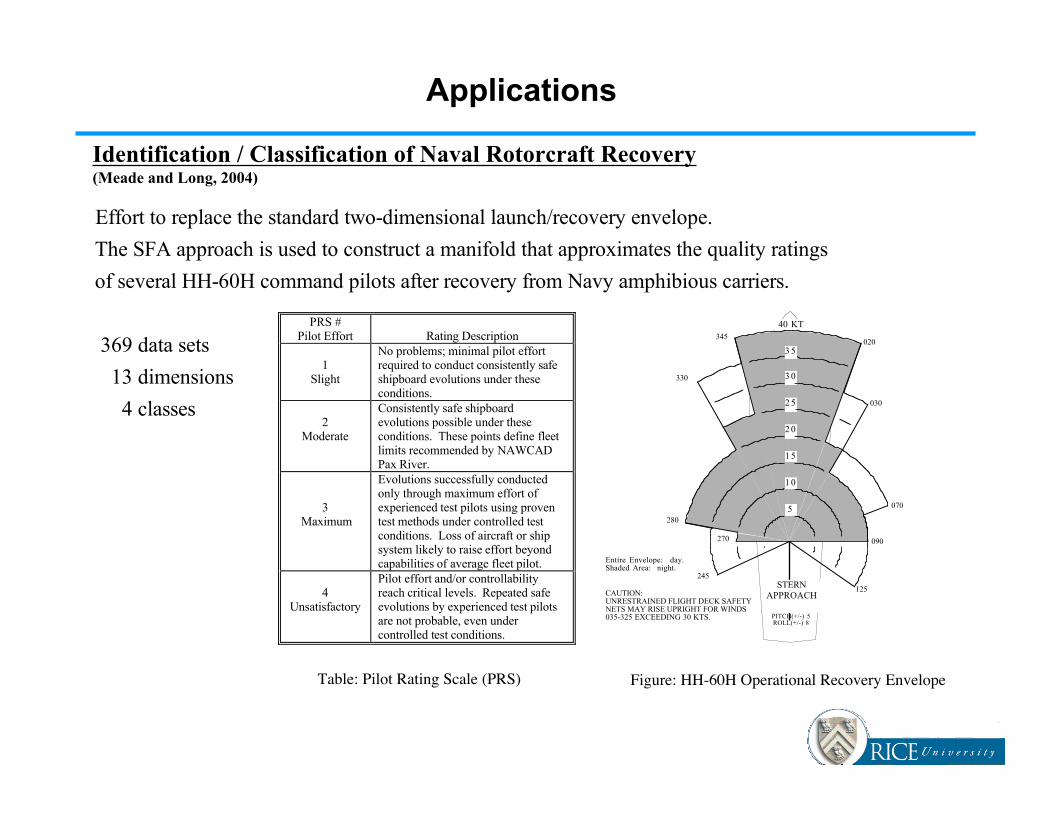
Identification / Classification of Naval Rotorcraft Recovery(Meade and Long, 2004)
Effort to replace the standard two-dimensional launch/recovery envelope.
The SFA approach is used to construct a manifold that approximates the quality ratings
of several HH-60H command pilots after recovery from Navy amphibious carriers.
369 data sets
13 dimensions
4 classes
Applications
CAUTION:UNRESTRAINED FLIGHT DECK SAFETYNETS MAY RISE UPRIGHT FOR WINDS035-325 EXCEEDING 30 KTS.
Entire Envelope: day.Shaded Area: night.
PITCH(+/-) 5ROLL(+/-) 8
5
1 0
1 5
2 0
2 5
3 0
3 5
40 KT
STERNAPPROACH
345
330
280
245
125
070
030
020
270 090
PRS #Pilot Effort Rating Description
1Slight
No problems; minimal pilot effortrequired to conduct consistently safeshipboard evolutions under theseconditions.
2Moderate
Consistently safe shipboardevolutions possible under theseconditions. These points define fleetlimits recommended by NAWCADPax River.
3 Maximum
Evolutions successfully conductedonly through maximum effort ofexperienced test pilots using proventest methods under controlled testconditions. Loss of aircraft or shipsystem likely to raise effort beyondcapabilities of average fleet pilot.
4Unsatisfactory
Pilot effort and/or controllabilityreach critical levels. Repeated safeevolutions by experienced test pilotsare not probable, even undercontrolled test conditions.
Table: Pilot Rating Scale (PRS) Figure: HH-60H Operational Recovery Envelope
Applications
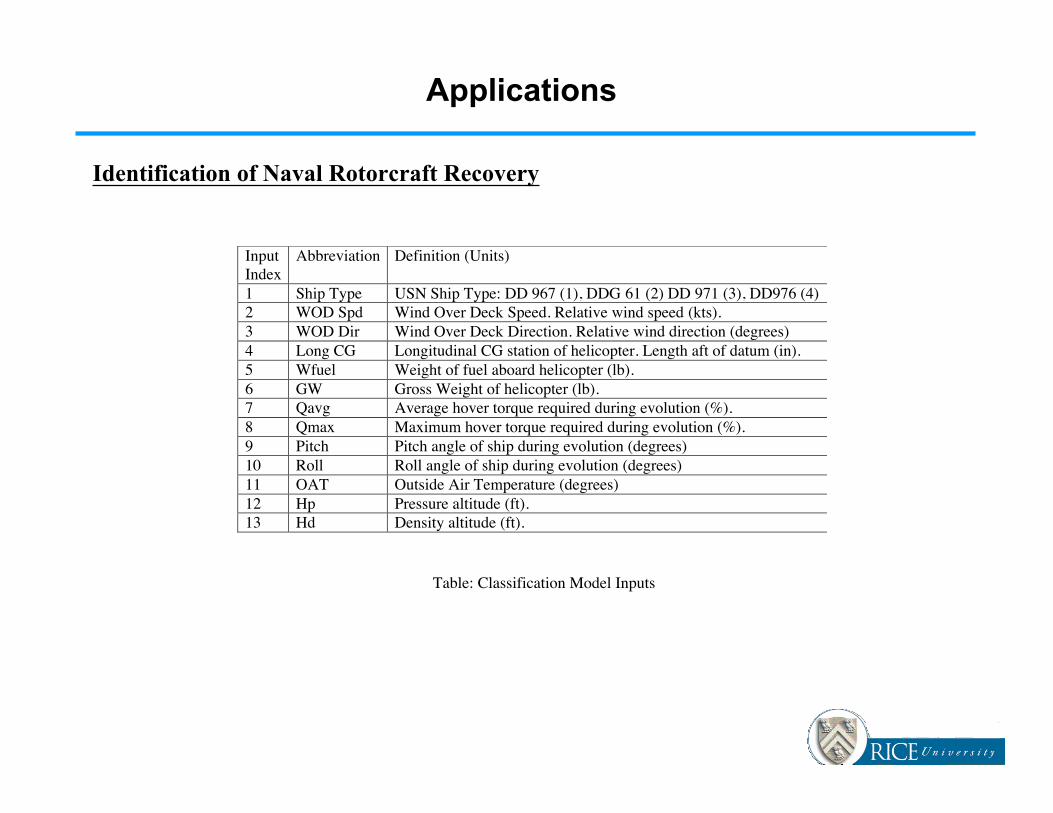
InputIndex
Abbreviation Definition (Units)
1 Ship Type USN Ship Type: DD 967 (1), DDG 61 (2) DD 971 (3), DD976 (4)2 WOD Spd Wind Over Deck Speed. Relative wind speed (kts).3 WOD Dir Wind Over Deck Direction. Relative wind direction (degrees)4 Long CG Longitudinal CG station of helicopter. Length aft of datum (in).5 Wfuel Weight of fuel aboard helicopter (lb).6 GW Gross Weight of helicopter (lb).7 Qavg Average hover torque required during evolution (%).8 Qmax Maximum hover torque required during evolution (%).9 Pitch Pitch angle of ship during evolution (degrees)10 Roll Roll angle of ship during evolution (degrees)11 OAT Outside Air Temperature (degrees)12 Hp Pressure altitude (ft).13 Hd Density altitude (ft).
Identification of Naval Rotorcraft Recovery
Table: Classification Model Inputs

Applications
Identification of Naval Rotorcraft Recovery
Figure: SFA recovery model using τ=0.16 and 201 radial bases: (a) approximation of PRS for recovery,
(b) approximation error, (c) convergence rate of the residual, (d) input sensitivity.
Most sensitive to: GW, Wfuel, and Hd.
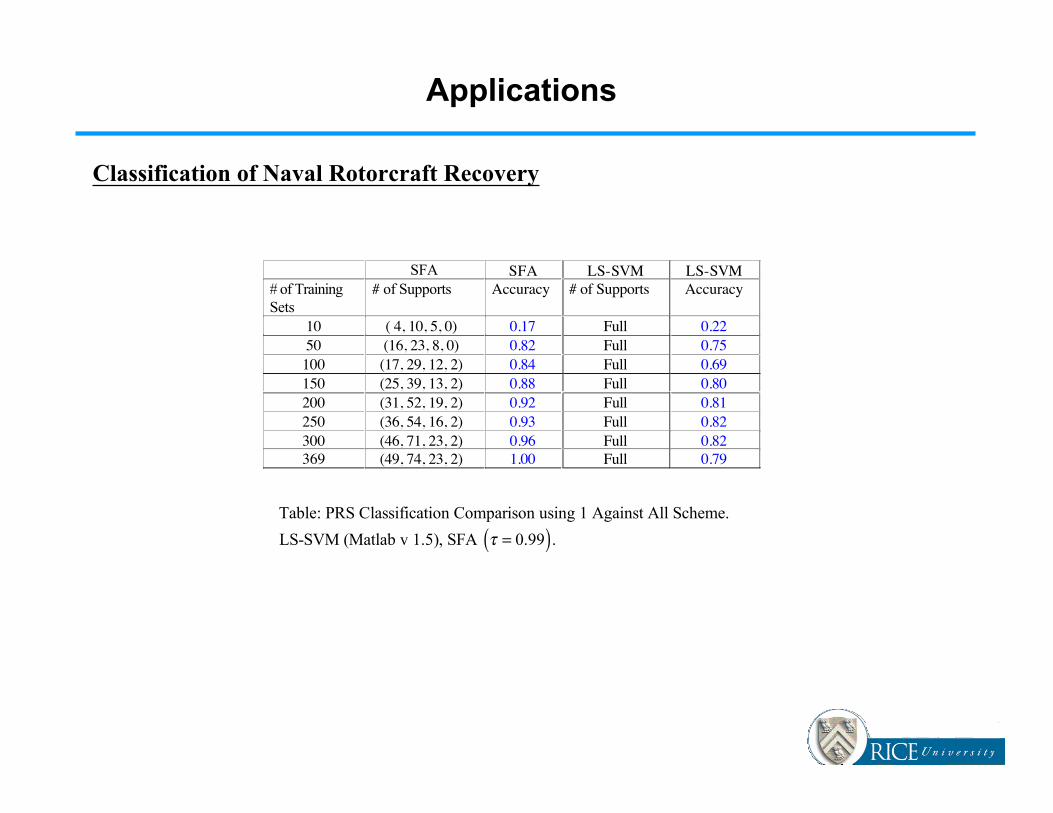
Classification of Naval Rotorcraft Recovery
Applications
SFA SFA LS-SVM LS-SVM # of Training Sets
# of Supports Accuracy # of Supports Accuracy
10 ( 4, 10, 5, 0) 0.17 Full 0.22 50 (16, 23, 8, 0) 0.82 Full 0.75 100 (17, 29, 12, 2) 0.84 Full 0.69 150 (25, 39, 13, 2) 0.88 Full 0.80 200 (31, 52, 19, 2) 0.92 Full 0.81 250 (36, 54, 16, 2) 0.93 Full 0.82 300 (46, 71, 23, 2) 0.96 Full 0.82 369 (49, 74, 23, 2) 1.00 Full 0.79
Table: PRS Classification Comparison using 1 Against All Scheme.
LS-SVM (Matlab v 1.5), SFA τ = 0.99( ).
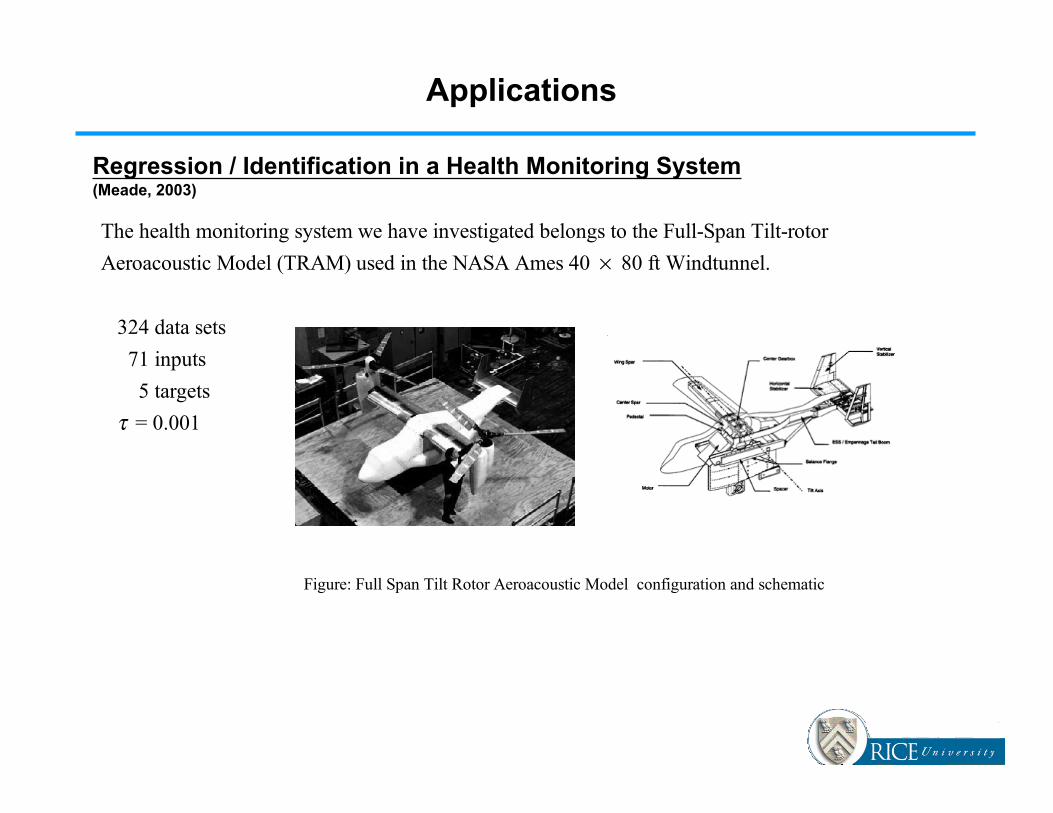
Applications
The health monitoring system we have investigated belongs to the Full-Span Tilt-rotor
Aeroacoustic Model (TRAM) used in the NASA Ames 40 × 80 ft Windtunnel.
324 data sets
71 inputs
5 targets
τ = 0.001
Regression / Identification in a Health Monitoring System(Meade, 2003)
Figure: Full Span Tilt Rotor Aeroacoustic Model configuration and schematic
Acoustic Traverses
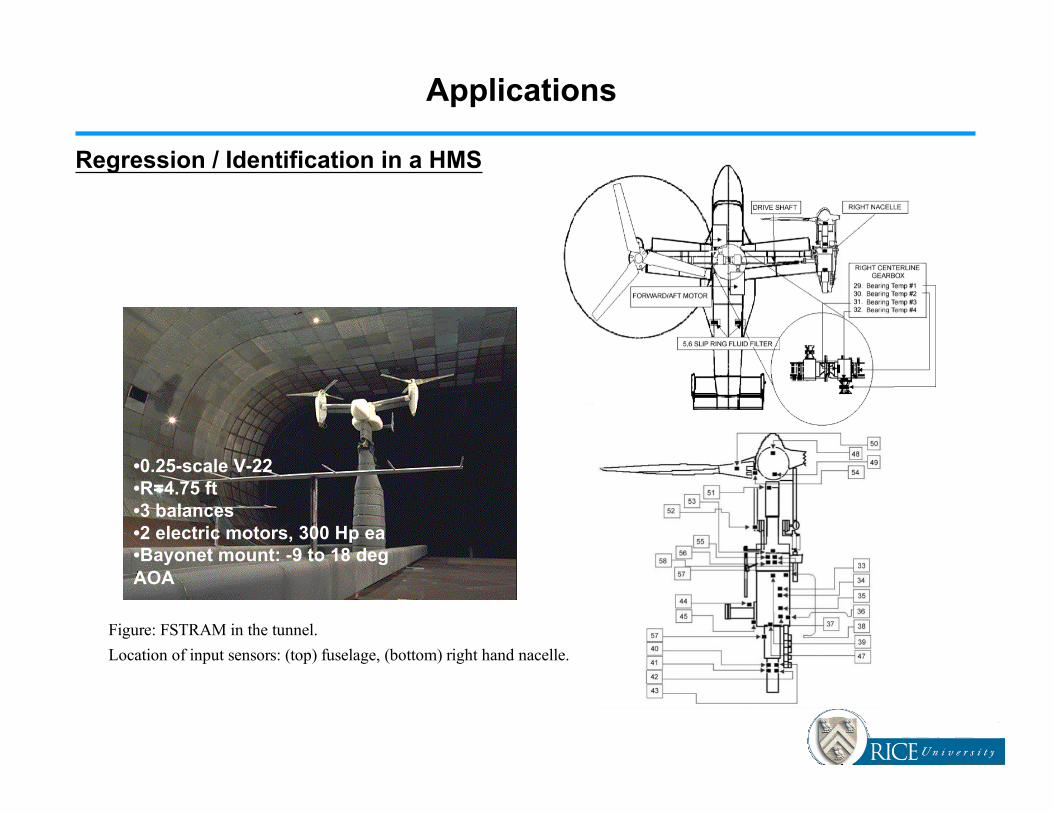
•0.25-scale V-22•R=4.75 ft•3 balances•2 electric motors, 300 Hp ea•Bayonet mount: -9 to 18 degAOA
Applications
Figure: FSTRAM in the tunnel.
Location of input sensors: (top) fuselage, (bottom) right hand nacelle.
Regression / Identification in a HMS

Applications
Regression / Identification in a HMS
Figure: Nacelle transmission #4 bearing with 265 supports and τ = 2
(a) time series model of the temperature, (b) approximation error, (c) convergence rate, and
(d) input sensitivity.
Most sensitive to motor RPM.
Applications
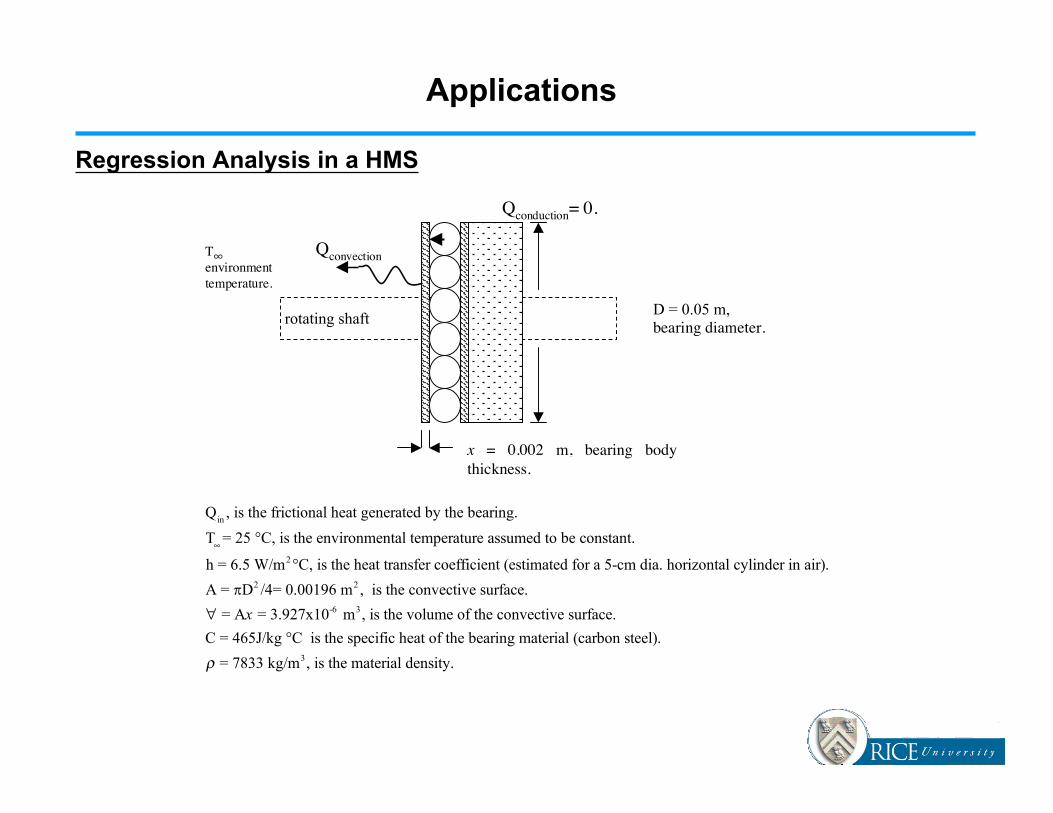
Regression Analysis in a HMS
Qconvection
Qconduction= 0.
D = 0.05 m,bearing diameter.
T∞environmenttemperature.
rotating shaft
x = 0.002 m, bearing bodythickness.
Qin
, is the frictional heat generated by the bearing.
T∞ = 25 °C, is the environmental temperature assumed to be constant.
h = 6.5 W/m2 °C, is the heat transfer coefficient (estimated for a 5-cm dia. horizontal cylinder in air).
A = !D2 /4= 0.00196 m2 , is the convective surface.
∀ = Ax = 3.927x10-6 m3, is the volume of the convective surface.
C = 465J/kg °C is the specific heat of the bearing material (carbon steel).
ρ = 7833 kg/m3, is the material density.

Applications
Regression Analysis in a HMS
Ti= T∞ +
Qin− Q
in− hA(T
i−1−T∞ )( )
hAexp −
hA(ti− t
i−1)
cρ∀⎡
⎣⎢
⎤
⎦⎥
The heat generated by the bearing, Qin
, is determined by the friction equation,
Qin= (µ ⋅ L ⋅r) ⋅ GR ⋅Ω
i⋅ 2π
60
⎛⎝⎜
⎞⎠⎟
, Watts
where
µ = 0.002 : is the friction coefficient estimate (obtained from bearing manufacturer)
L : is the frictional load in Newtons (dependent on the bearing location)
r = 0.025 m : is the bearing radius
GR : is the transmission gear reduction constant and depends on the bearing location.
Ωi : is the operating RPM.
L is determined from our sensitivity analysis of the SFA model.
Applications
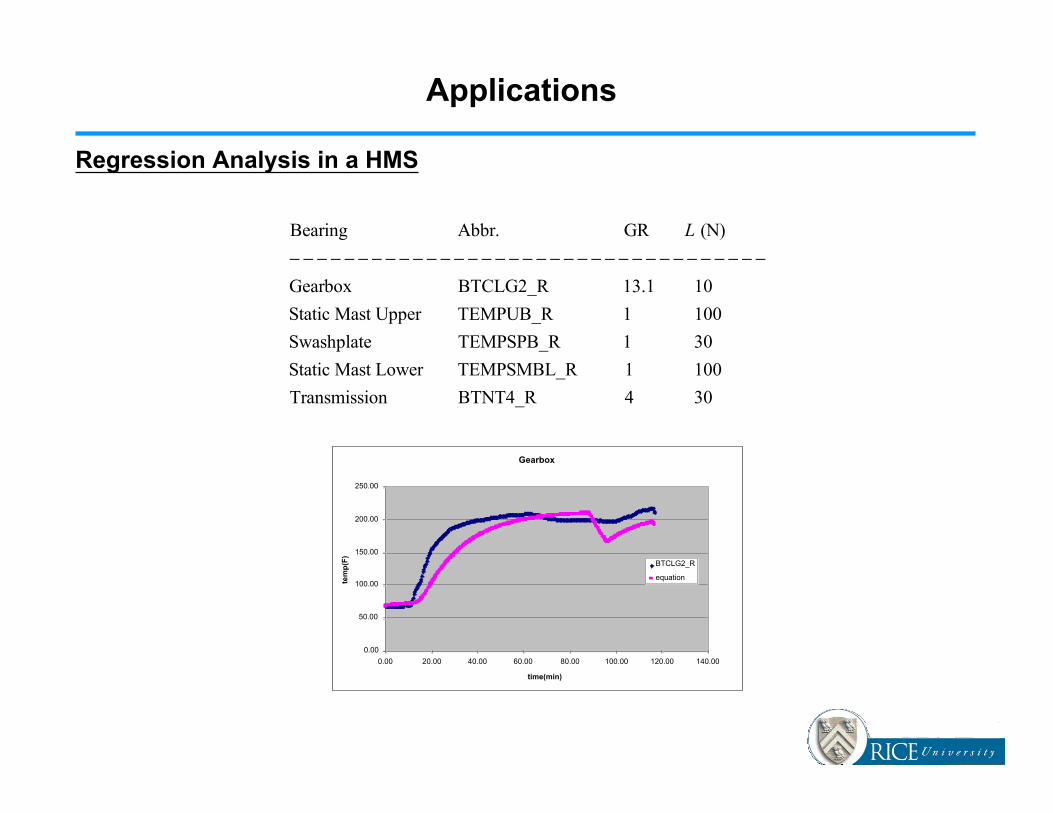
Regression Analysis in a HMS
Bearing Abbr. GR L (N)
− − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − −Gearbox BTCLG2_R 13.1 10
Static Mast Upper TEMPUB_R 1 100
Swashplate TEMPSPB_R 1 30
Static Mast Lower TEMPSMBL_R 1 100
Transmission BTNT4_R 4 30
Gearbox
0.00
50.00
100.00
150.00
200.00
250.00
0.00 20.00 40.00 60.00 80.00 100.00 120.00 140.00
time(min)
temp(F)
BTCLG2_R
equation
Applications
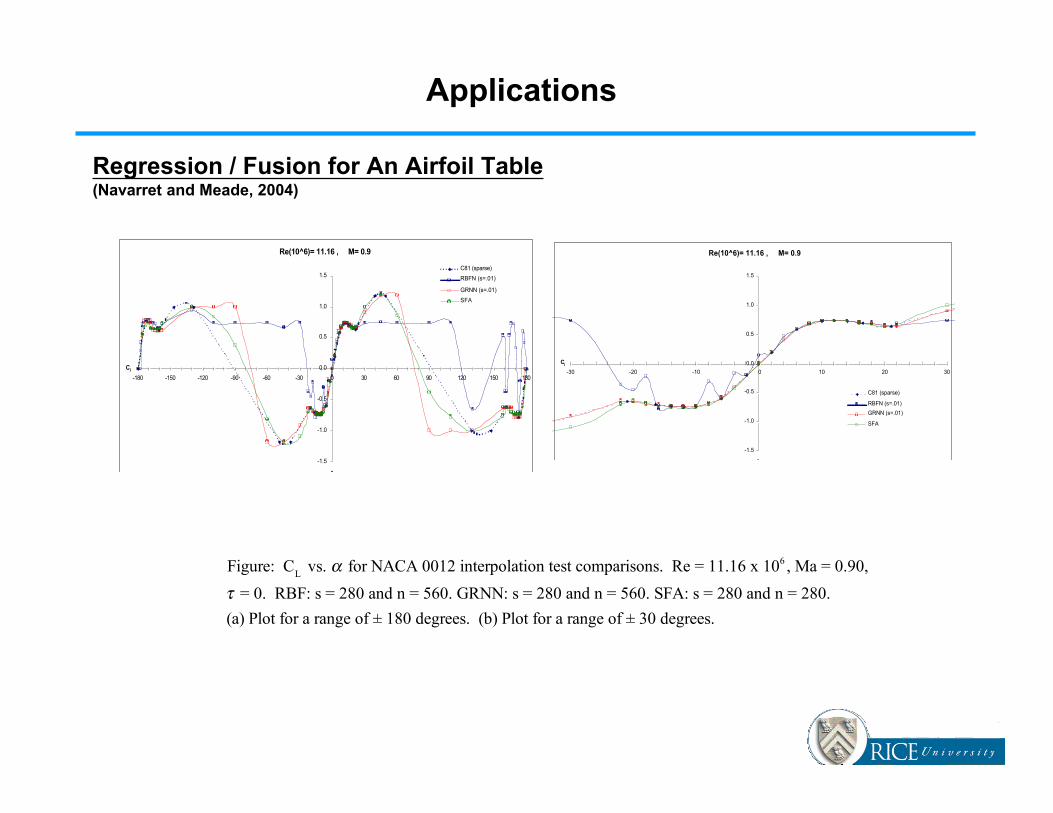
Regression / Fusion for An Airfoil Table(Navarret and Meade, 2004)
Figure: CL
vs. α for NACA 0012 interpolation test comparisons. Re = 11.16 x 106 , Ma = 0.90,
τ = 0. RBF: s = 280 and n = 560. GRNN: s = 280 and n = 560. SFA: s = 280 and n = 280.
(a) Plot for a range of ± 180 degrees. (b) Plot for a range of ± 30 degrees.
Re(10^6)= 11.16 , M= 0.9
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
?
Cl
C81 (sparse)
RBFN (s=.01)
GRNN (s=.01)
SFA
Re(10^6)= 11.16 , M= 0.9
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
-30 -20 -10 0 10 20 30
?
Cl
C81 (sparse)
RBFN (s=.01)
GRNN (s=.01)
SFA
Applications
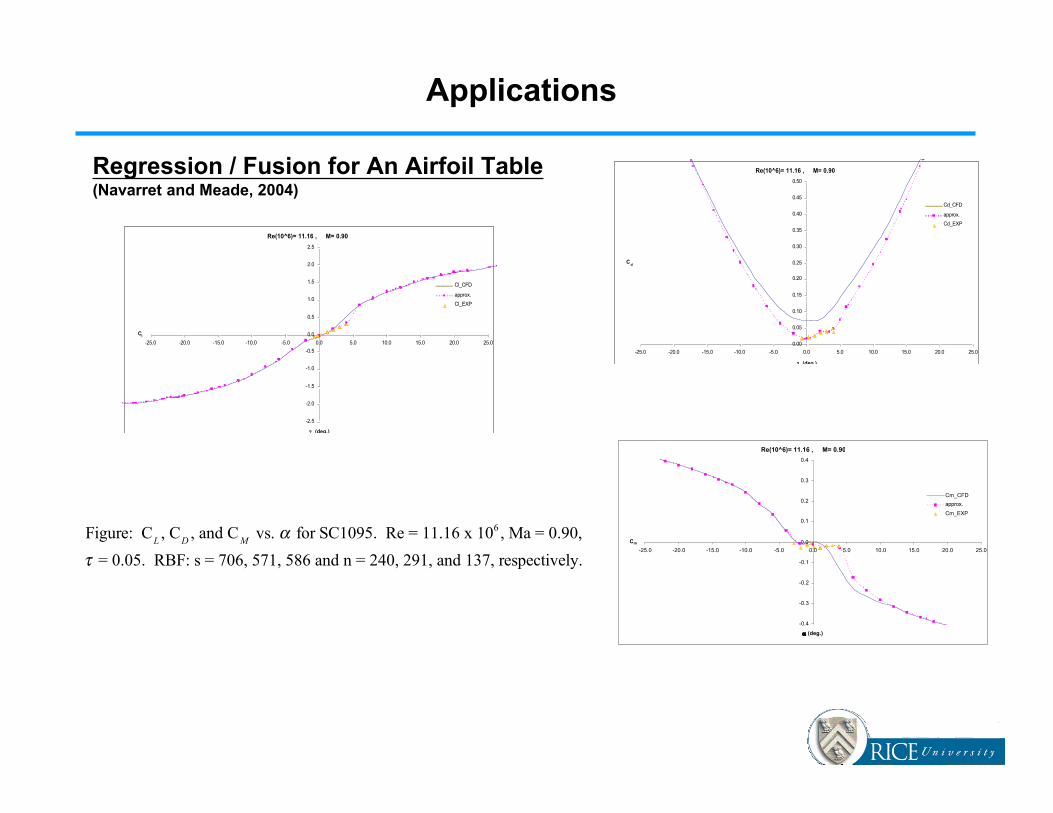
Regression / Fusion for An Airfoil Table(Navarret and Meade, 2004)
Figure: CL, C
D, and C
M vs. α for SC1095. Re = 11.16 x 106 , Ma = 0.90,
τ = 0.05. RBF: s = 706, 571, 586 and n = 240, 291, and 137, respectively.
Re(10^6)= 11.16 , M= 0.90
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
-25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0 15.0 20.0 25.0
? (deg.)
Cl
Cl_CFD
approx.
Cl_EXP
Re(10^6)= 11.16 , M= 0.90
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
-25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0 15.0 20.0 25.0
? (deg.)
Cd
Cd_CFD
approx.
Cd_EXP
Re(10^6)= 11.16 , M= 0.90
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
-25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0 15.0 20.0 25.0
α (deg.)
Cm
Cm_CFD
approx.
Cm_EXP
Conclusions & Future Work
The TR with MWR framework shows some promise as a way to merge theory,
experimental observations, and computational fluid dynamics.
We have shown it is possible to form ua (ξ) with little user interaction.
Further investigation of the method and the applications are required:
• Perform meshless solution of ua (ξ) with uCFD (ξ) and uEXP (ξi) together.
This would produce meshless and data-driven computational mechanics solver.
• Investigate method in designing better experiments.
• Investigate the method with proxy data.
• Investigate other types of bases.