algorithmics for robot swarms
TRANSCRIPT
Algorithmics for Robot Swarms
David Peleg
The Weizmann Institute
Background
Mobile Robots
Units (robots) equipped with:
Motor Capabilities:Freely move on a two dimensional plane
Sensory Capabilities:Sense the positions of other robots
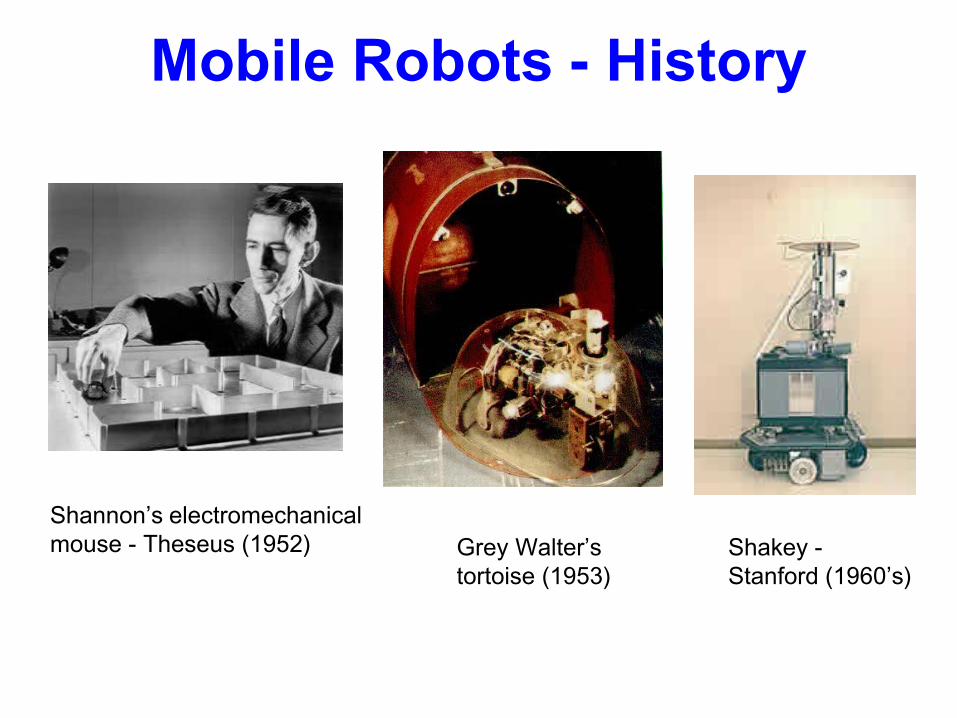
Mobile Robots - History
Grey Walter’s tortoise (1953)
Shakey - Stanford (1960’s)
Shannon’s electromechanical mouse - Theseus (1952)

Mobile Robots - Industrial
Mobile Robots - Military
DARPA challenge 2004: Unmanned vehicles must cross 150km of desert
GSR (1980’s)
T-800 (~2029AD)
Mobile Robots – Space Exploration
Sojourner - Mars Pathfinder mission (1997)
Europ. Space Agency (ESA):Automated transfer vehicle (~2005)
A long time ago in a galaxy far, far away…

Mobile Robots – Personal Use
Sony’s Asimo Sony’s Aibo
Friendly Robotics: - Vacuum cleaners- Lawn mowers
Various Means of Mobility
Flying
Insect-like
Marine
Reconfigurable Mobile Robots
Reconfigurable Mobile Robots
Robot Swarms
Robot Swarms
Swarm: Collection of independent, autonomously operating mobile robots
Motivating Metaphor: Insect Swarms
[Bees]
Motivating Metaphor: Insect Swarms
[Locust]
Characteristics of Robot Swarms
Typically, the robots in a swarm arevery smallvery simplevery limited in capabilities:
• weak energy resources• limited means of communication• Limited processing power
Why Multiple Robot Systems?
Can use several cheap & simple robots (rather than one complicated robot) - low total cost
Can solve tasks impossible for a single robot (e.g., sweep large regions)
Can perform risky / hard / tiresome / boring tasks in hazardous / harsh environments
Can tolerate the destruction of some robots
Robot Swarms - Exploration

Robot Swarms - Cleanup
Robot Swarms – Engine Cleanup
Robot Swarms - Robocup
Robot Swarms – Robocup (2)
Distributed Robot Algorithmics
Coordination & Control Issues
Large swarms must perform complex coordinated operations
In particular, movement management must ensure smooth performance and avoid collisions / bottlenecks
Most Work up to 90’s
Single robot or small robot team Centralized control Implementation and engineering
aspects (mobility, function) Coordination issues handled in
an ad-hoc / heuristic manner
[Fukuda +, 89], [Brooks, 85], [Mataric, 94], [Cao +, 95], [Durfee, 95], [Balch, Arkin, 98]
Such approaches - might be inadequate for large swarms
Need for Distributed Control Algorithms
⇓
General Aims of Study
Develop algorithms for distributed control
of a set of autonomous mobile robots
Given a task, what kind of local coordination
is necessary so that the robots can
accomplish it?Given a task, analyze minimum level of
(sensory, computational, motoric) capabilities that the robots must possess to collectively solve it (how "weak" can each robot be?)
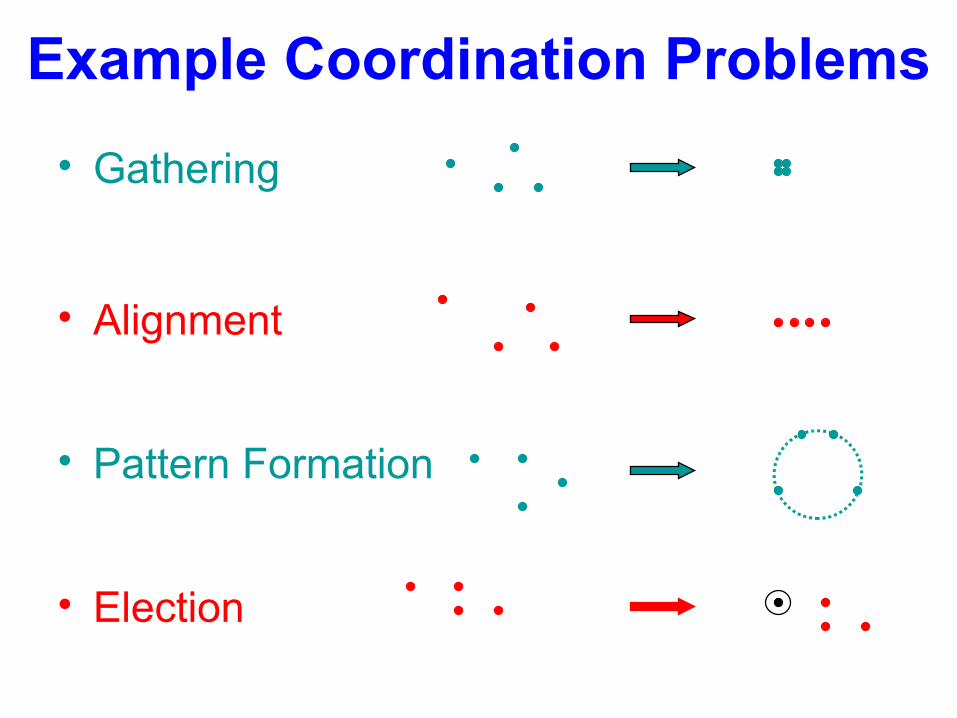
Example Coordination Problems
• Gathering
• Alignment
• Pattern Formation
• Election
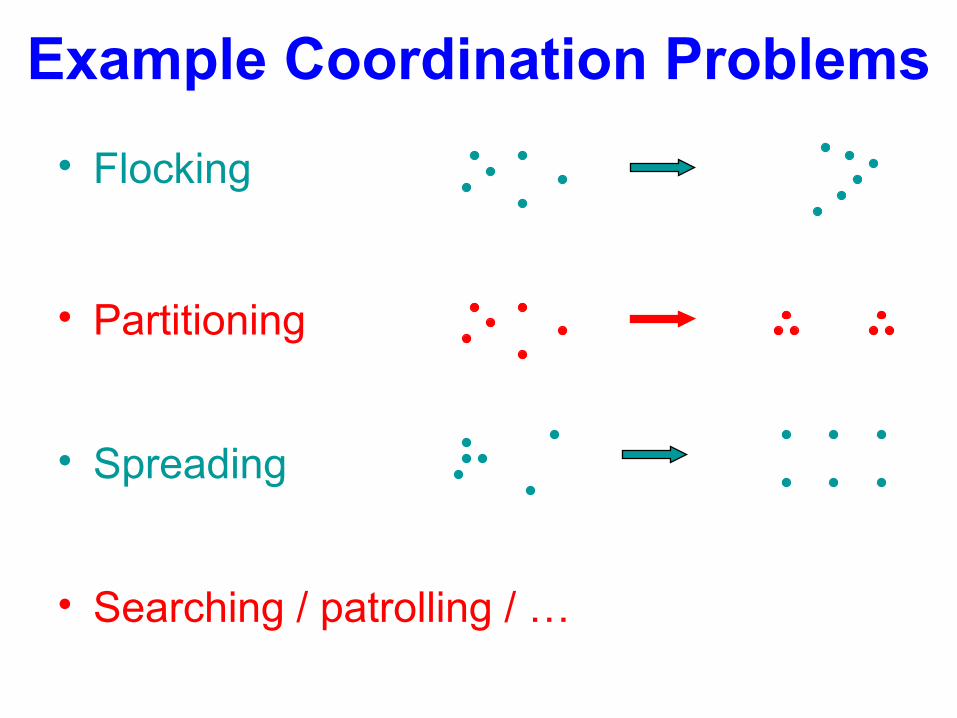
Example Coordination Problems
• Flocking
• Partitioning
• Searching / patrolling / …
• Spreading
Model
Common Model for Distributed Control Algorithms
Robots are independent Robots have limited capabilities Each robot operates in look-
compute-move cycles
General characteristics:
Initiated [Yamashita+, 96], [Suzuki+, 96]
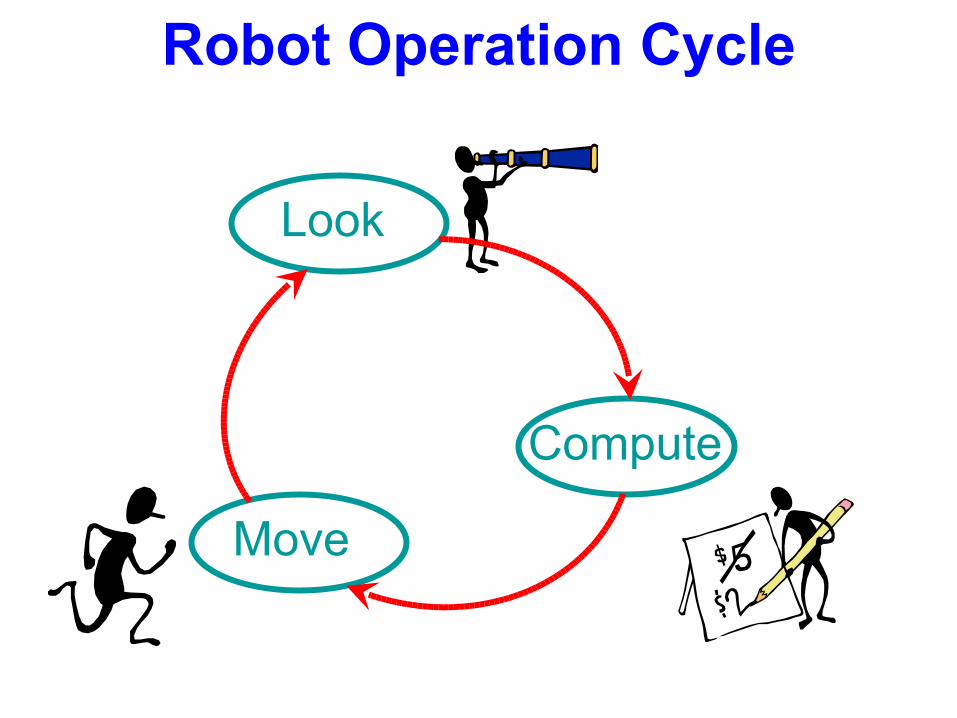
Robot Operation Cycle
Compute
Move
Look
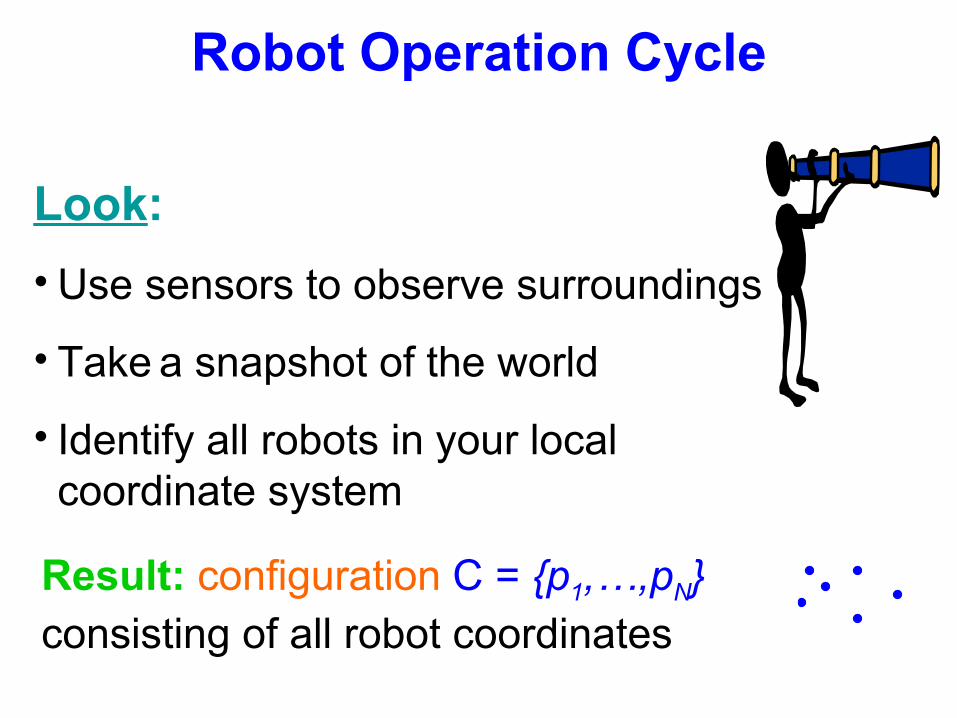
Robot Operation Cycle
Look:
• Use sensors to observe surroundings
• Take a snapshot of the world
• Identify all robots in your local coordinate system
Result: configuration C = {p1,…,pN} consisting of all robot coordinates
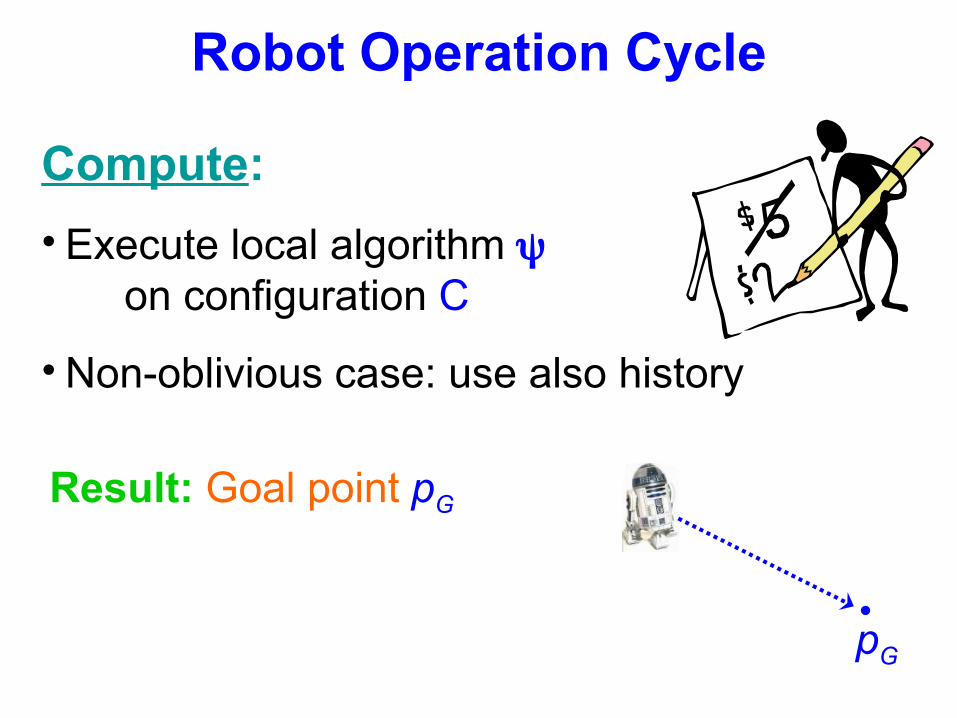
Robot Operation Cycle
Compute:
• Execute local algorithm ψ on configuration C
• Non-oblivious case: use also history
Result: Goal point pG
pG
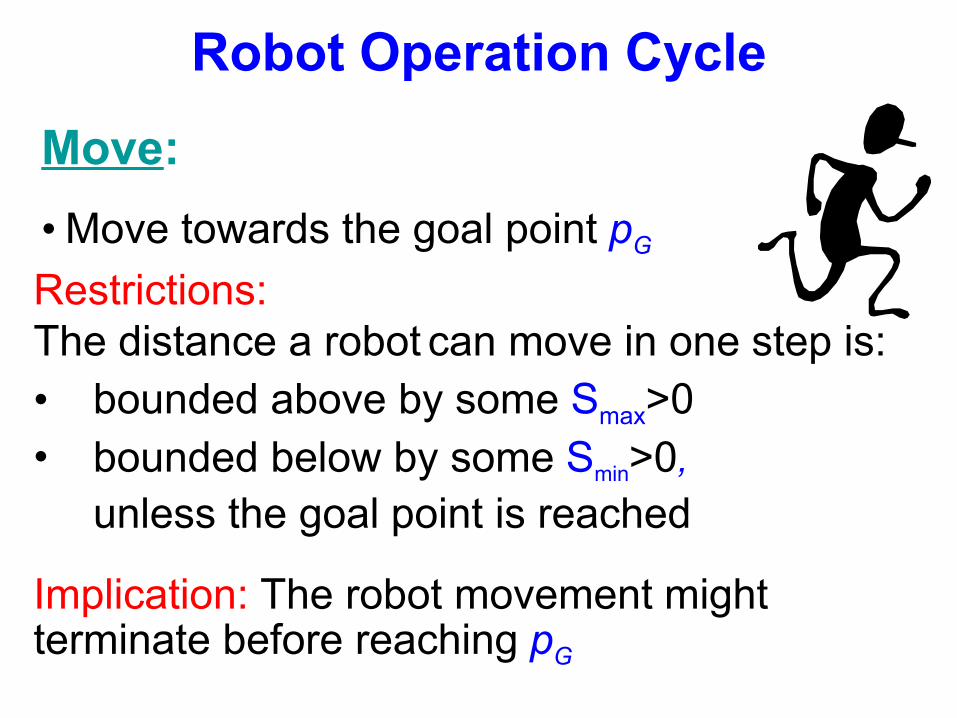
Robot Operation Cycle
Move:
• Move towards the goal point pG
Implication: The robot movement might terminate before reaching pG
Restrictions: The distance a robot can move in one step is:• bounded above by some Smax>0• bounded below by some Smin>0,
unless the goal point is reached
Common Model Assumptions
Robots in the swarm are: homogeneous anonymous (no ID’s) dimensionless (can pass through each
other without noticing) without explicit communication mechanism oblivious (no memory / state)
Common Model Assumptions:Oblivious / Non-oblivious
Non-oblivious: remember history (e.g., the robot positions in the previous cycle, or all robot positions since the beginning of the computation)
Oblivious: lack memory, cannot record state
Why Study Oblivious (& Relatively Dumb) Robots?
Algorithms will work in a dynamic environment (where robots join/leave the system)
Algorithms are inherently self-stabilizing (i.e., withstand transient errors)
Algorithms that work correctly for weaker robots will work for stronger robots
Rad
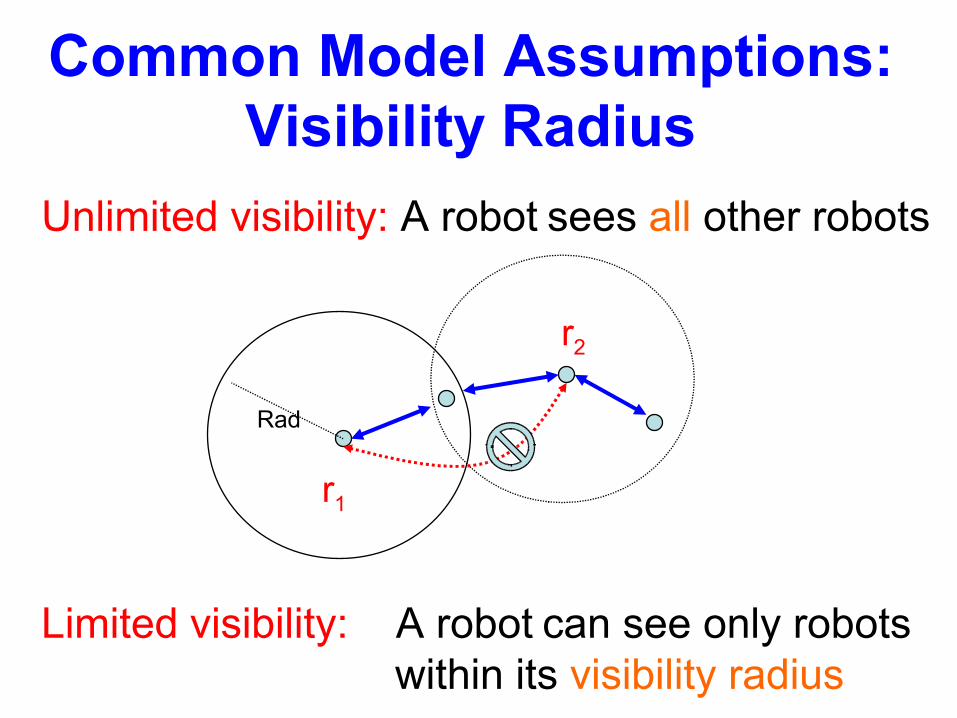
Common Model Assumptions:Visibility Radius
Unlimited visibility: A robot sees all other robots
Limited visibility: A robot can see only robots within its visibility radius
r1
r2
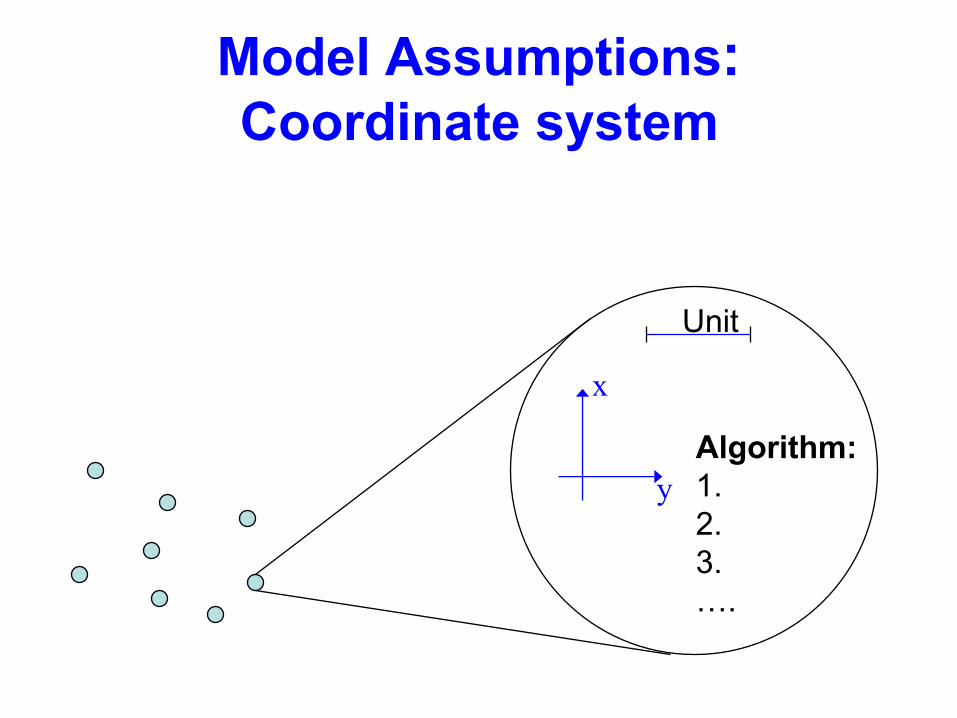
x
y
Unit
Algorithm:1.2.3.….
Model Assumptions:Coordinate system
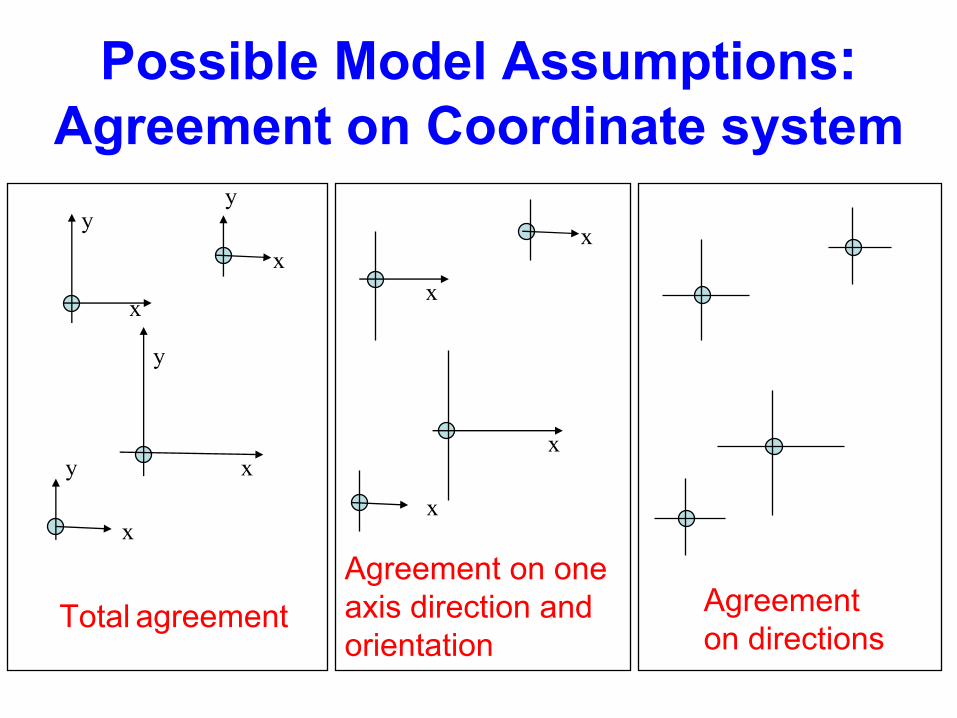
Possible Model Assumptions:Agreement on Coordinate system
x
y
x
y x
y
x
y
Total agreement
x
x
x
x
Agreement on one axis direction and orientation
Agreement on directions
x
y
x
y
x y
x
y
x
y
x
y
x
y
x
y
x
yx
y
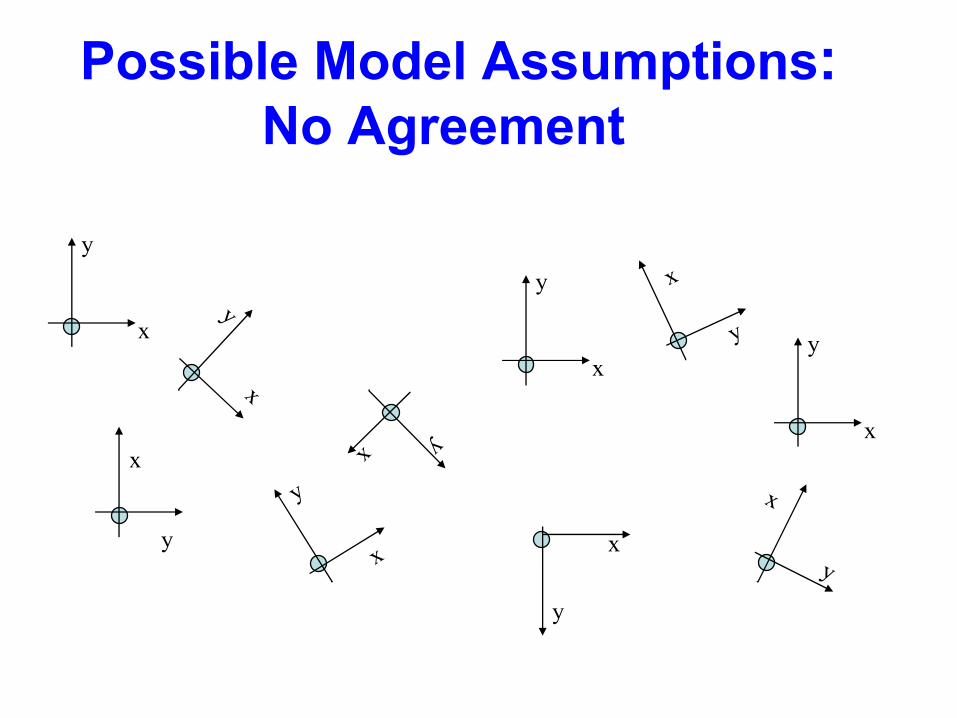
Possible Model Assumptions:No Agreement
Common Model Assumptions (cont.)
Robots in the swarm do not have common coordinates, scale or orientation
Common Model Assumptions (cont.)
Robots in the swarm have:• Unlimited visibility• Perfect position measurements
(distances and angles)• Accurate computations with reals
(no calculation errors)• No failures
From the point of view of the “distributed computing” community:
• gives rise to interesting new communication model, based solely on positional / “geometric” information exchange
• differs in key aspects from traditional models• raises intriguing research problems
The new model
Modelling Time
Time is a critical aspect of every distributed system Synchronous? Asynchronous?
Common models for robot swarms: Fully synchronous (FSYNC) Semi-synchronous (SSYNC) Fully asynchronous (ASYNC)
Fully / Semi-Synchronous Model
Discrete time steps 0,1,2,...
Fully-synchronous model (FSYNC): At each time instant t, every robot ri is active
Semi-synchronous model (SSYNC): • At each time instant t,
every robot ri is either active or inactive• At least one active robot at each time instant• Every robot is active infinitely often
LOOK
COMPUTE
MOVE
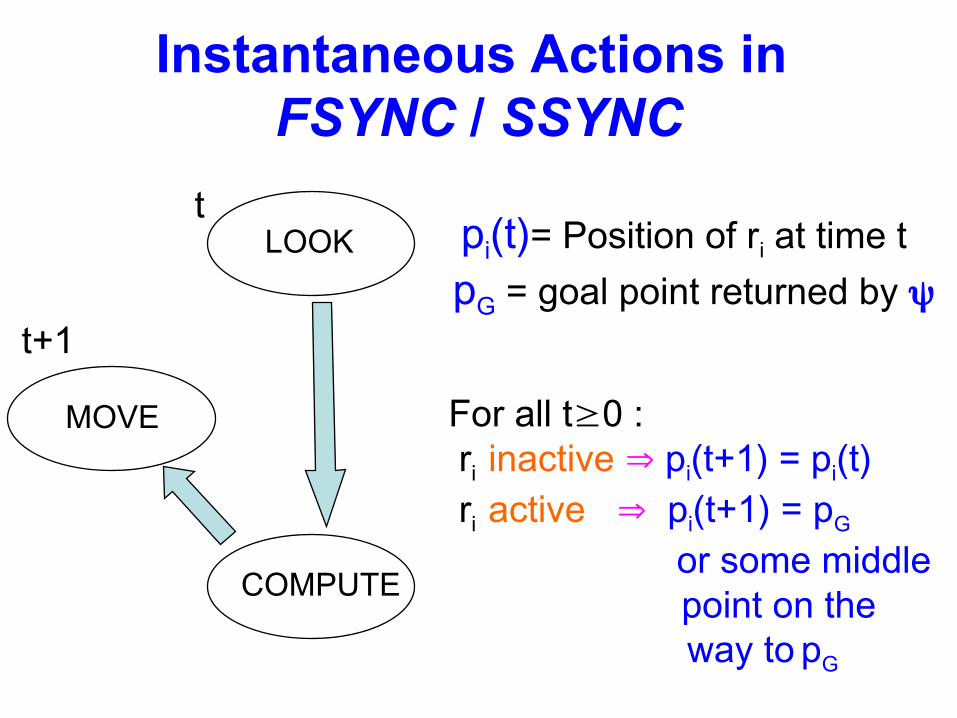
Instantaneous Actions in FSYNC / SSYNC
pi(t)= Position of ri at time t
For all t0 : ri inactive pi(t+1) = pi(t) ri active pi(t+1) = pG
or some middle point on the
way to pG
pG = goal point returned by ψ
t
t+1
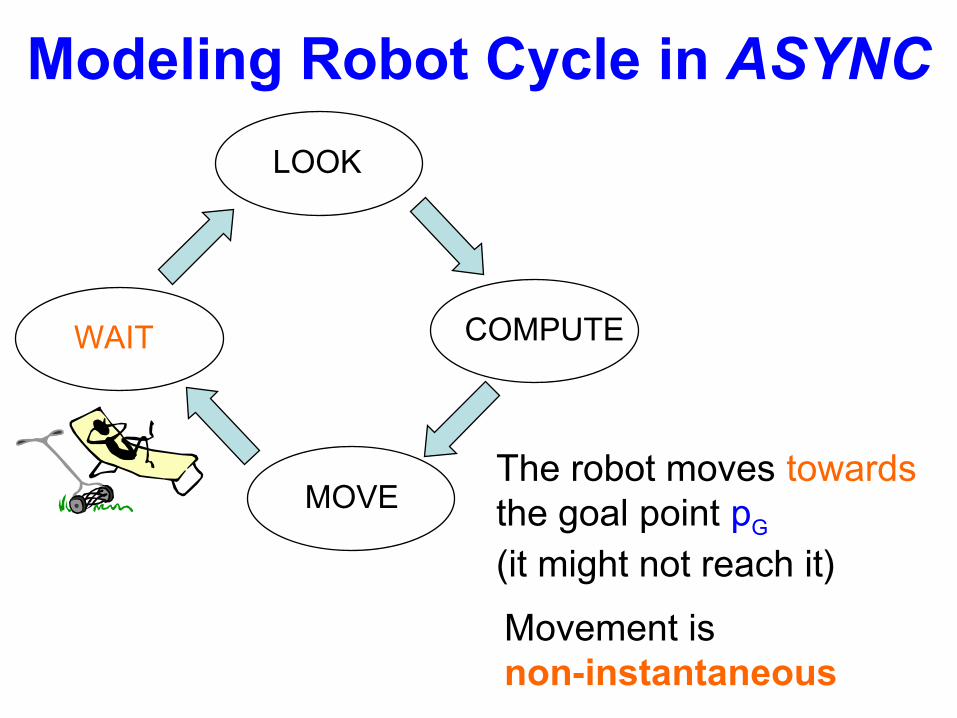
Modeling Robot Cycle in ASYNC
LOOK
COMPUTE
MOVE
WAIT
The robot moves towards the goal point pG (it might not reach it)
Movement is non-instantaneous
Assumptions: • A robot cannot wait indefinitely• A robot can see other robots while they move• A robot cannot distinguish between moving
and waiting robots
Modeling Robot Cycle in ASYNC
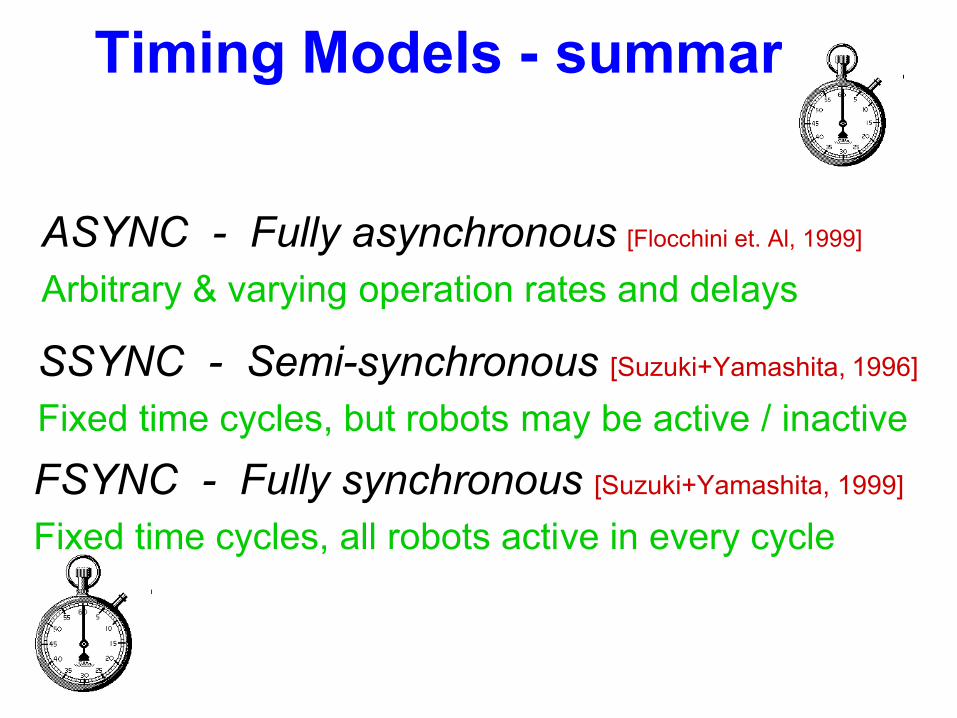
Timing Models - summary
ASYNC - Fully asynchronous [Flocchini et. Al, 1999]
Arbitrary & varying operation rates and delays
SSYNC - Semi-synchronous [Suzuki+Yamashita, 1996]
Fixed time cycles, but robots may be active / inactive
FSYNC - Fully synchronous [Suzuki+Yamashita, 1999]
Fixed time cycles, all robots active in every cycle
Comparison of Timing Models
SSYNC vs ASYNC
Problem P solvable in ASYNC
P is solvable also in SSYNC
Reason: Consider algorithm A for problem P
SSYNC = { possible runs of A in SSYNC }ASYNC = { possible runs of A in ASYNC }SSYNC ASYNC
• Algorithm A solves problem P in ASYNC must succeed in every run in ASYNC
succeeds also in every run in SSYNC
SSYNC vs ASYNC
Problem P solvable in SSYNC
P solvable also in FSYNC
FSYNC vs SSYNC
(same reasoning)
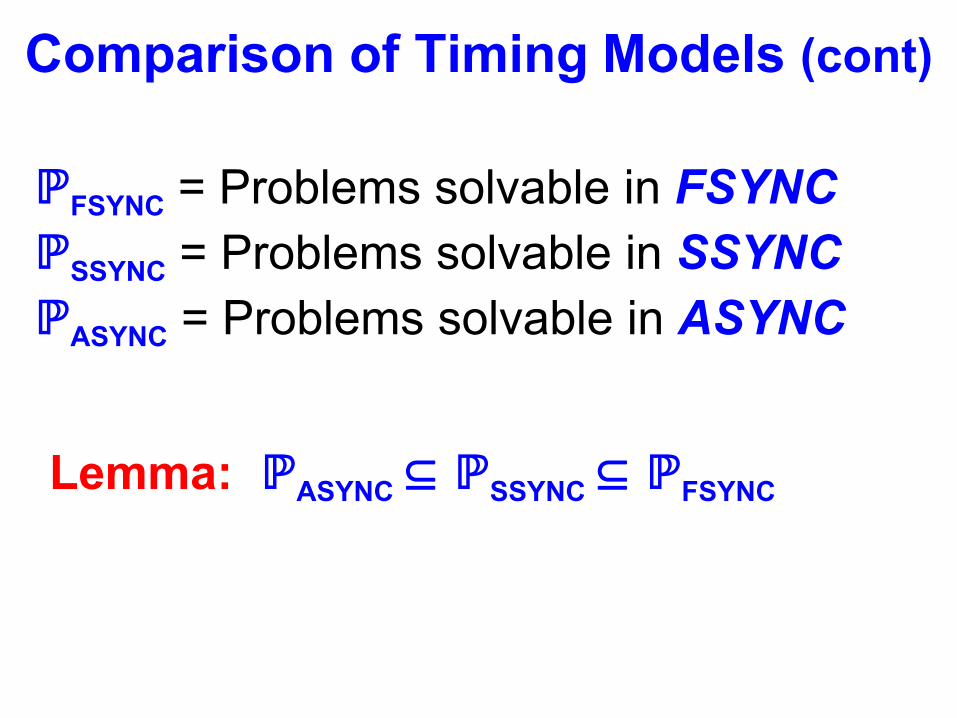
ℙFSYNC = Problems solvable in FSYNCℙSSYNC = Problems solvable in SSYNCℙASYNC = Problems solvable in ASYNC
Lemma: ℙASYNC ℙSSYNC ℙFSYNC
Comparison of Timing Models (cont)
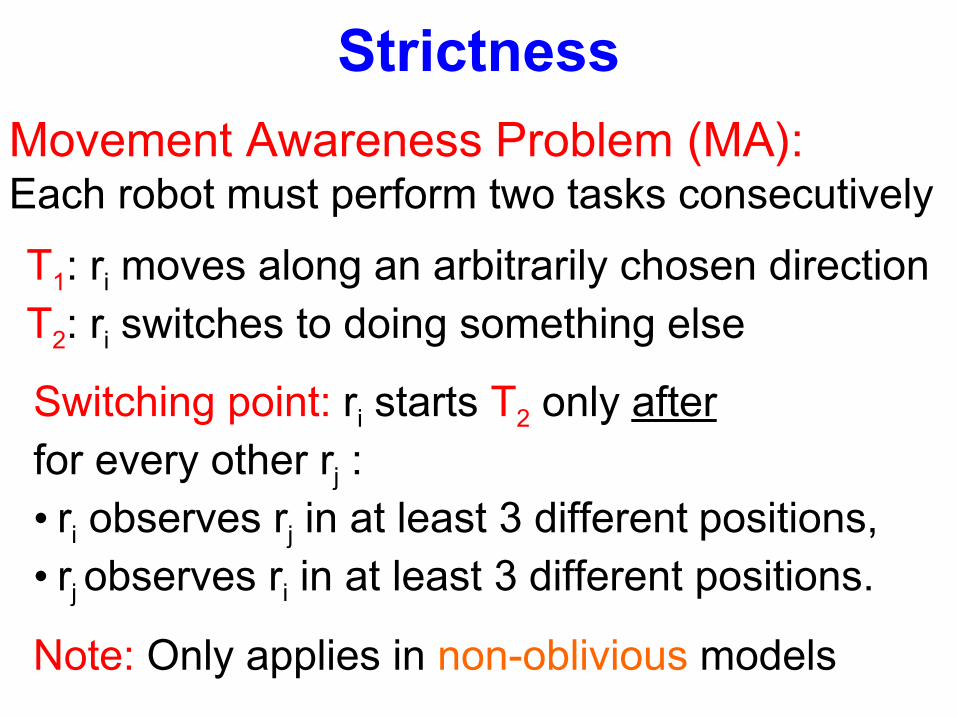
Movement Awareness Problem (MA):Each robot must perform two tasks consecutively
T1: ri moves along an arbitrarily chosen directionT2: ri switches to doing something else
Strictness
Switching point: ri starts T2 only after for every other rj :• ri observes rj in at least 3 different positions,• rj observes ri in at least 3 different positions.
Note: Only applies in non-oblivious models
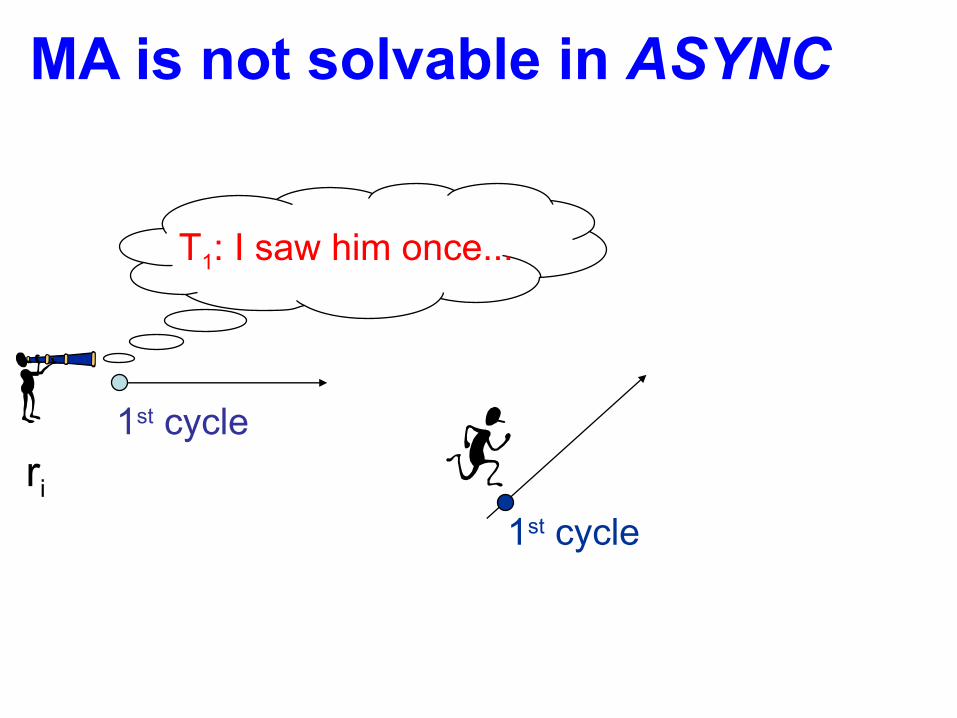
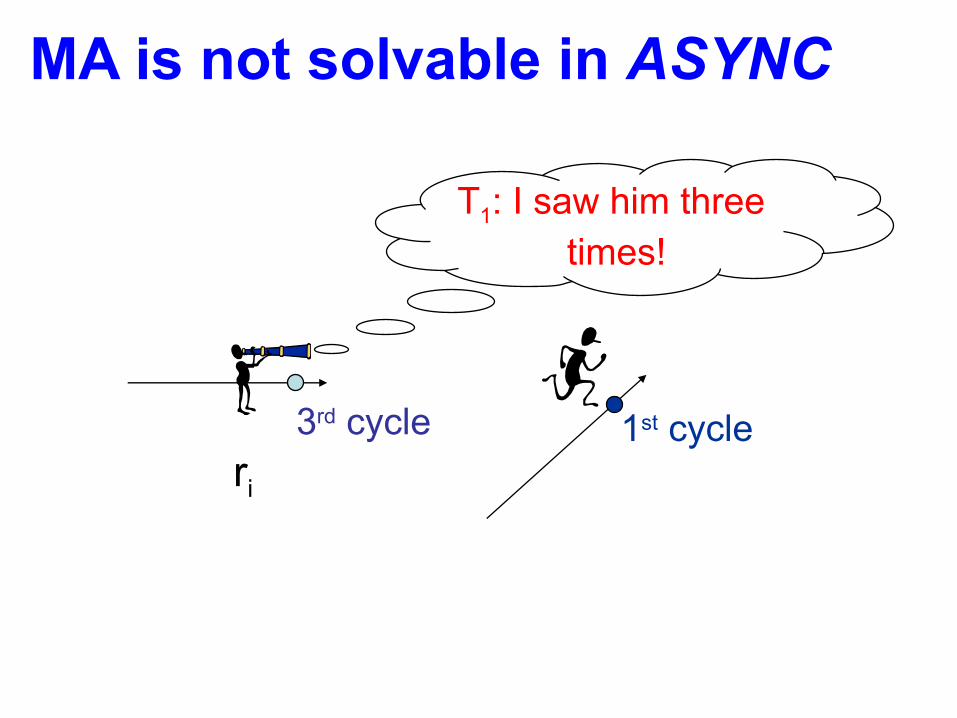
MA is not solvable in ASYNC
T1: I saw him once...
1st cycle
1st cycle
ri
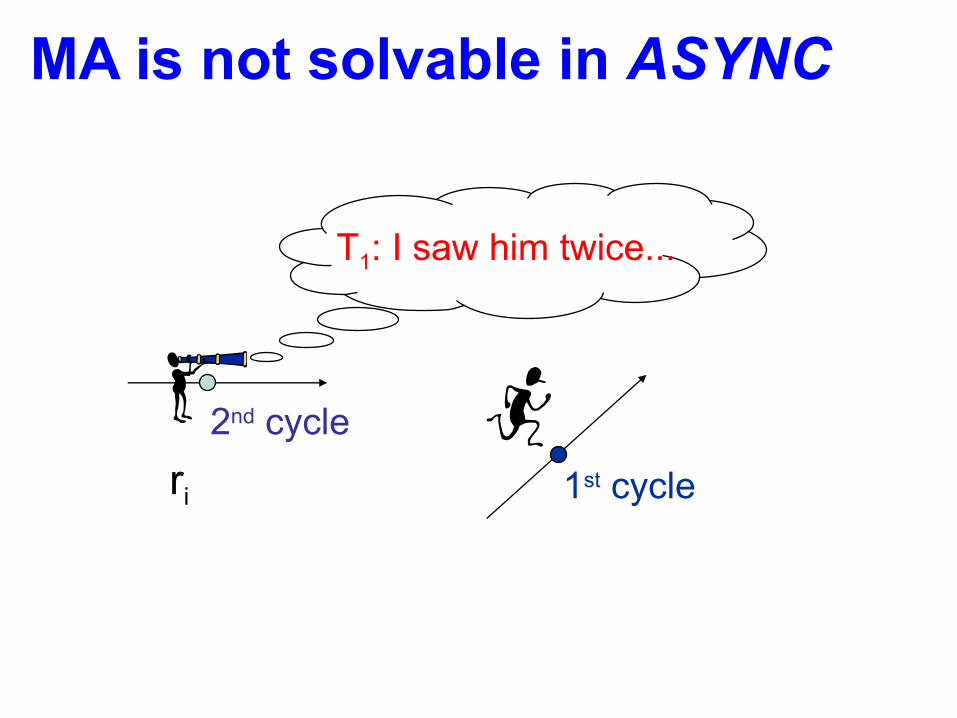
MA is not solvable in ASYNC
2nd cycle
1st cycle
T1: I saw him twice...
ri
MA is not solvable in ASYNC
3rd cycle 1st cycle
T1: I saw him three times!
ri
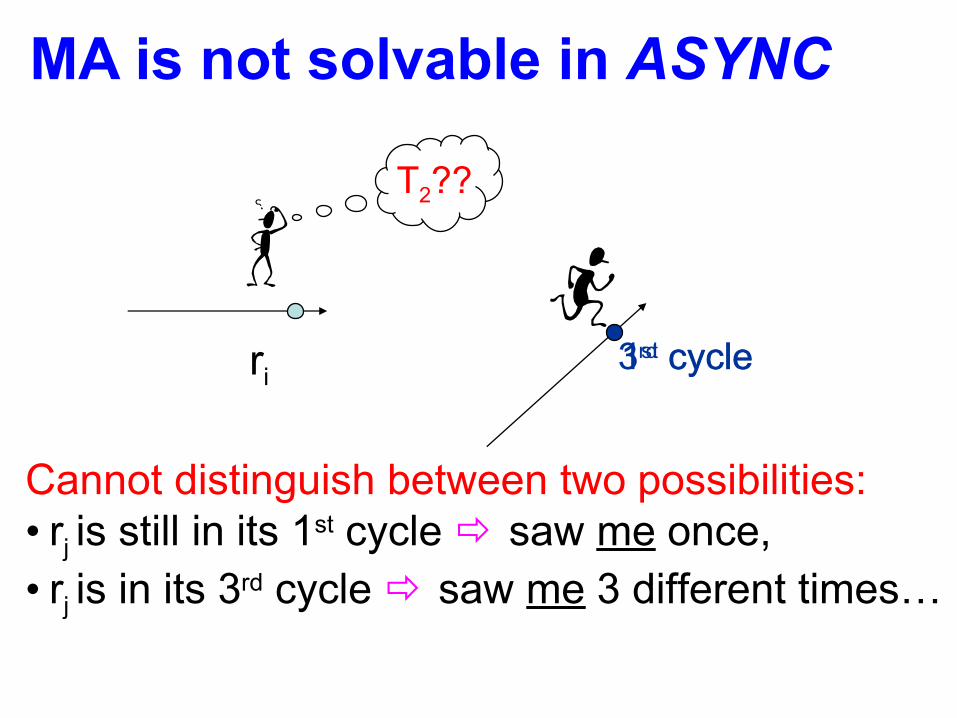
MA is not solvable in ASYNC
T2??
1st cycle
Cannot distinguish between two possibilities:• rj is still in its 1st cycle saw me once,• rj is in its 3rd cycle saw me 3 different times…
ri3rd cycle
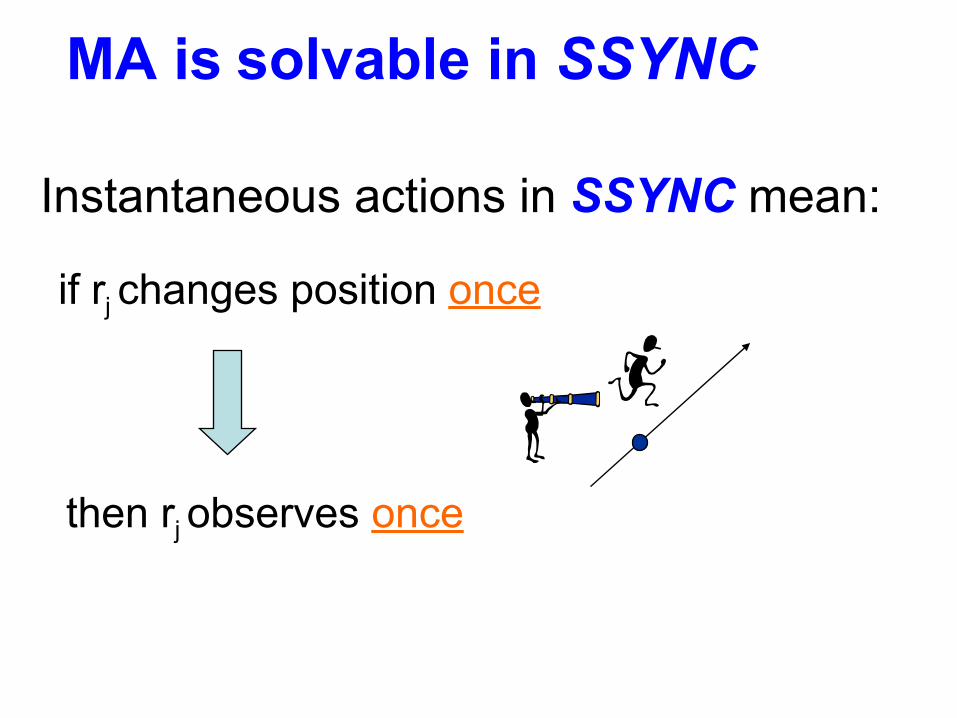
MA is solvable in SSYNC
Instantaneous actions in SSYNC mean:
if rj changes position once
then rj observes once
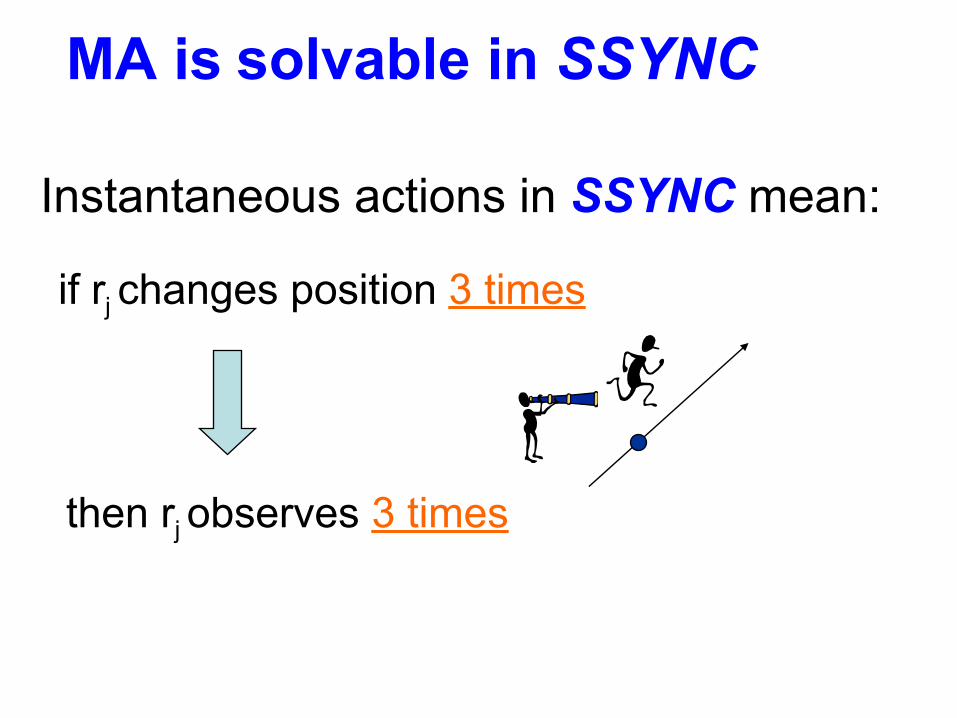
MA is solvable in SSYNC
Instantaneous actions in SSYNC mean:
if rj changes position 3 times
then rj observes 3 times
MA is solvable in SSYNC
Lemma: ℙASYNC ℙSSYNC
Review of Previous Results
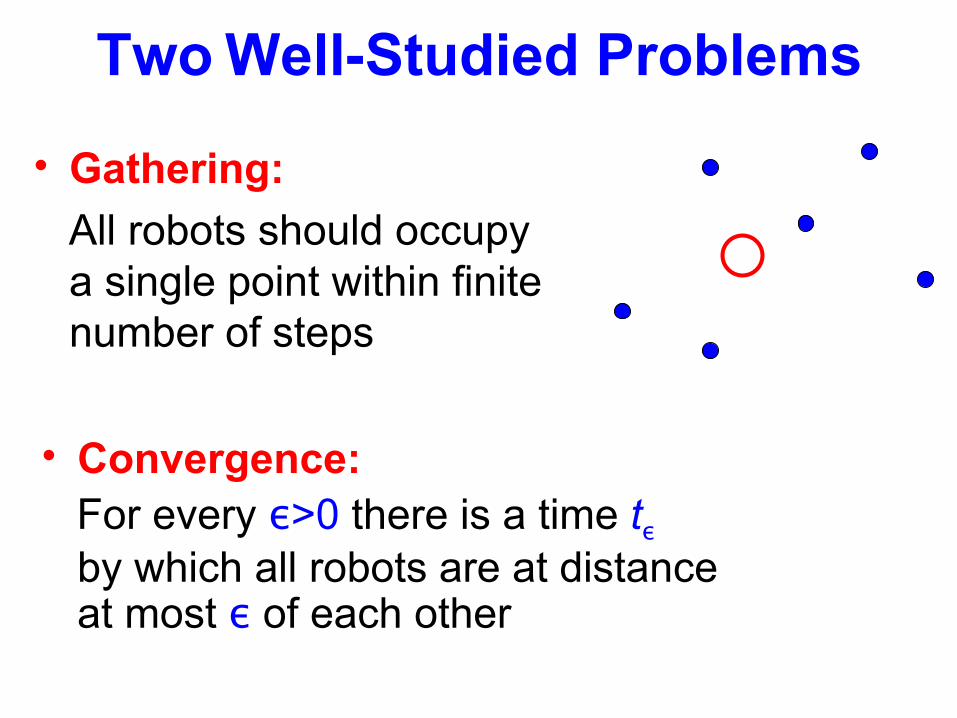
Two Well-Studied Problems
• Gathering:
All robots should occupy a single point within finite number of steps
• Convergence: For every ε>0 there is a time tε
by which all robots are at distance at most ε of each other
Impossibility of gathering N=2 robots in SSYNC (hence also ASYNC) model [Suzuki, Yamashita,96]
Algorithms for gathering N>2 robots in SSYNC and ASYNC models [Suzuki, Yamashita, 96,
Cieliebak, Flocchini, Prencipe, Santoro, 03]
Review of Previous Results
Gathering with limited visibility Convergence algorithm for every N
[Ando, Oasa, Suzuki, Yamashita, 99]
Gathering algorithm with compass in ASYNC model
[Flocchini, Prencipe, Santoro, Widmayer, 96]
Previous Results – Cont.
Convergence via gravitational algorithms Center-of-gravity algorithm converges
in ASYNC model
[Cohen, Peleg, 04]
Previous Results – Cont.
Pattern formation Robots should arrange themselves in simple
geometric shapes (circle / square / line etc.) Several algorithms for exact formation or
convergence in ASYNC model
[Ando, Suzuki, Yamashita, 95; Sugihara, Suzuki, 96;
Suzuki, Yamashita, 96, 99; Defago, Konagaya, 02;
Flocchini, Prencipe, Santoro, Widmayer, 99;
Chatzigiannakis, Markou, Nikoletseas, 04;
Katreniak, 05]
Previous Results on Other Tasks
Flocking Algorithm allowing the robots to
follow a predefined leader
[Prencipe, 02; Gervasi, Prencipe, 04]
Previous Results – Cont.
Spreading / partitioning Algorithms allowing the robots to
spread evenly in a given region or partition themselves into groups
[Sugihara, Suzuki, 96; Cohen, Peleg, 06; Efrima, Peleg, 07]
Previous Results – Cont.
Wake-up (a.k.a. Freeze-Tag) Algorithms allowing one robot to
efficiently wake up all the others [Arkin, Bender, Fekete, Mitchell, Skutella, 02;
Sztainberg, Arkin, Bender, Mitchell, 02]
Previous Results – Cont.
The Gathering Problem

Initially the robots are in arbitrary
distinct positions
In finite time, they gather in the same place
The Gathering Problem
Istantaneous activities All robots are active in every round
The problem is easily solvable
Gathering in the FSYNC Model
Gathering in the FSYNC Model
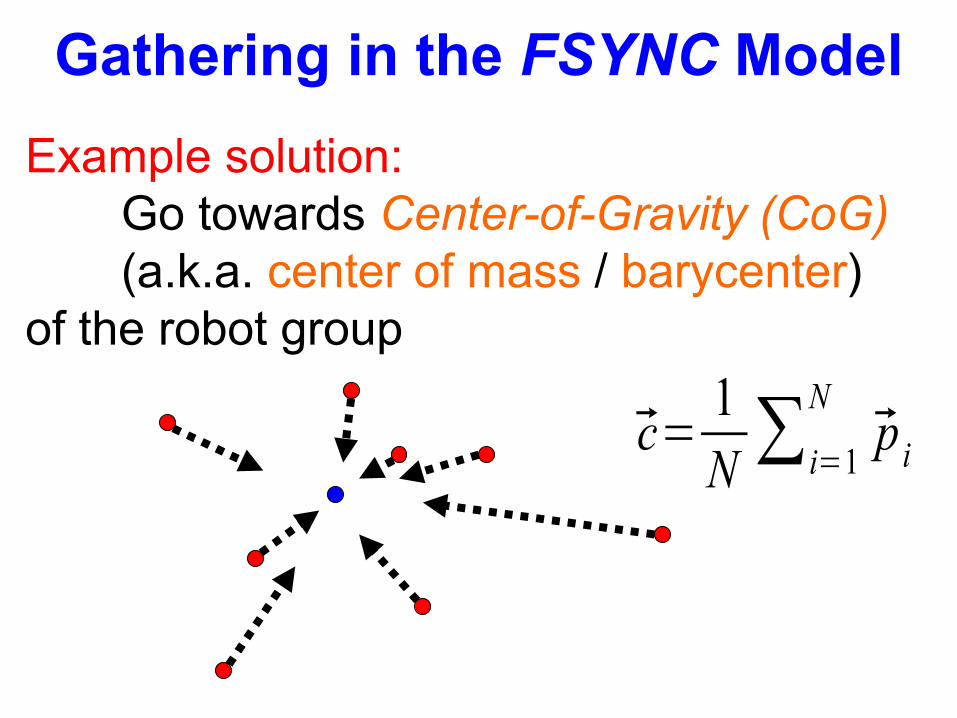
Example solution:Go towards Center-of-Gravity (CoG)(a.k.a. center of mass / barycenter)
of the robot group
c=1N∑i=1
Np i
Gathering in the FSYNC Model
Analysis - sketch:• Once all robots are within distance smin of center of gravity – meet in one round
• Until then – in each round, robots get closer to center of gravity by at least smin
(complication: center of gravity can change from one round to the next…)
Gathering in SSYNC / ASYNC
More problematic…
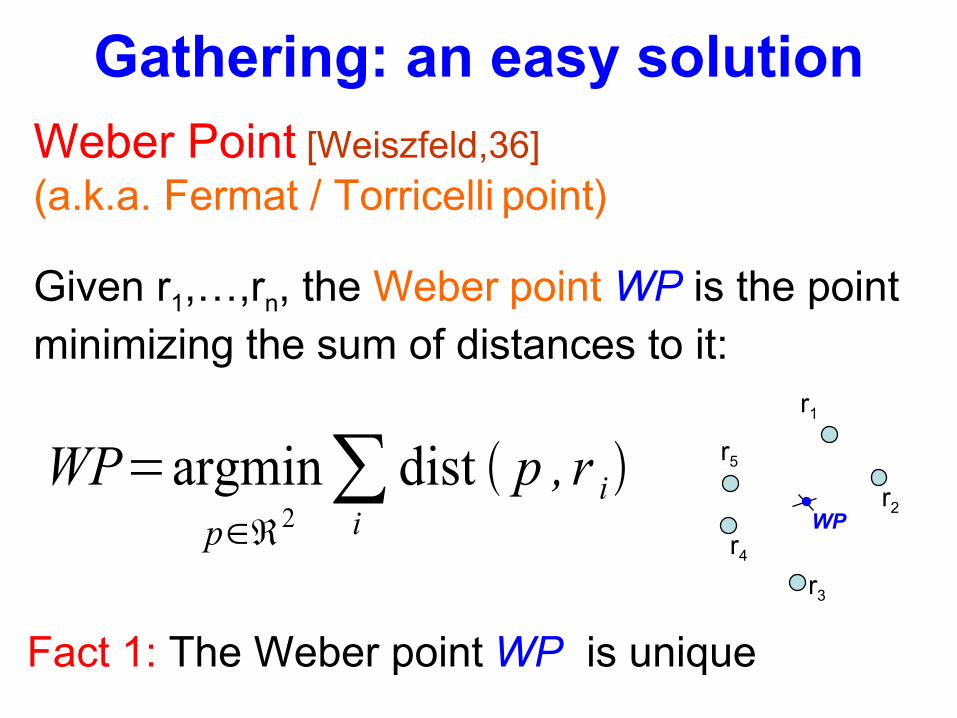
Gathering: an easy solutionWeber Point [Weiszfeld,36] (a.k.a. Fermat / Torricelli point)
WP=argminp∈ℜ2
∑i
dist p , r i
Given r1,…,rn, the Weber point WP is the point minimizing the sum of distances to it:
Fact 1: The Weber point WP is unique
WPr2
r3
r4
r5
r1
r4
r2
r1
r5
r3
WP
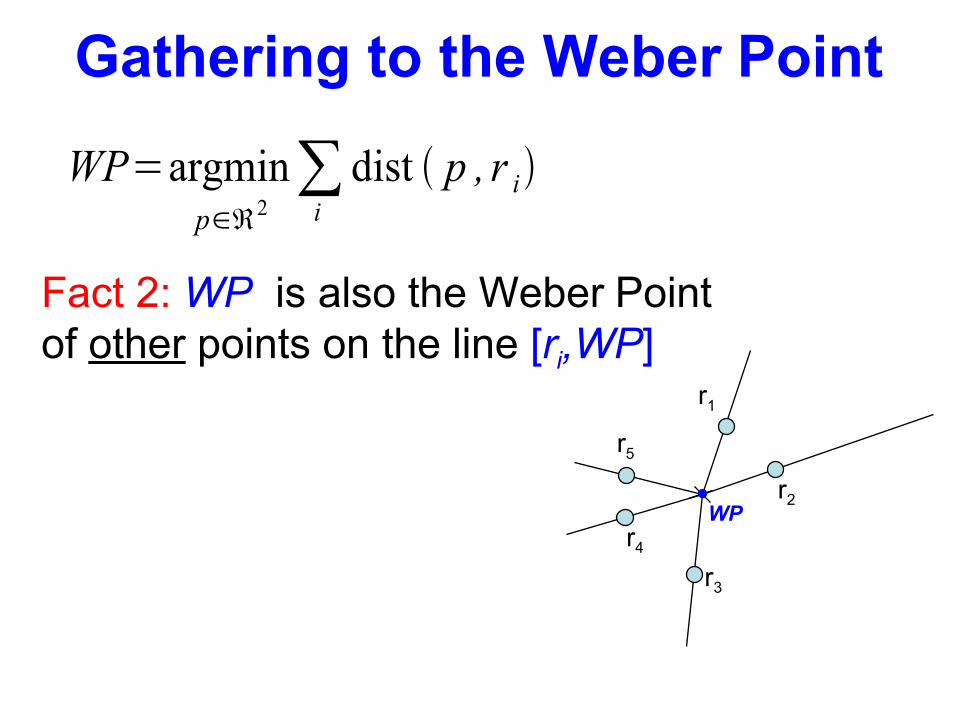
Gathering to the Weber Point
Fact 2: WP is also the Weber Point of other points on the line [ri,WP]
WP=argminp∈ℜ2
∑i
dist p , r i
r4
r2
r1r5
r3
WP
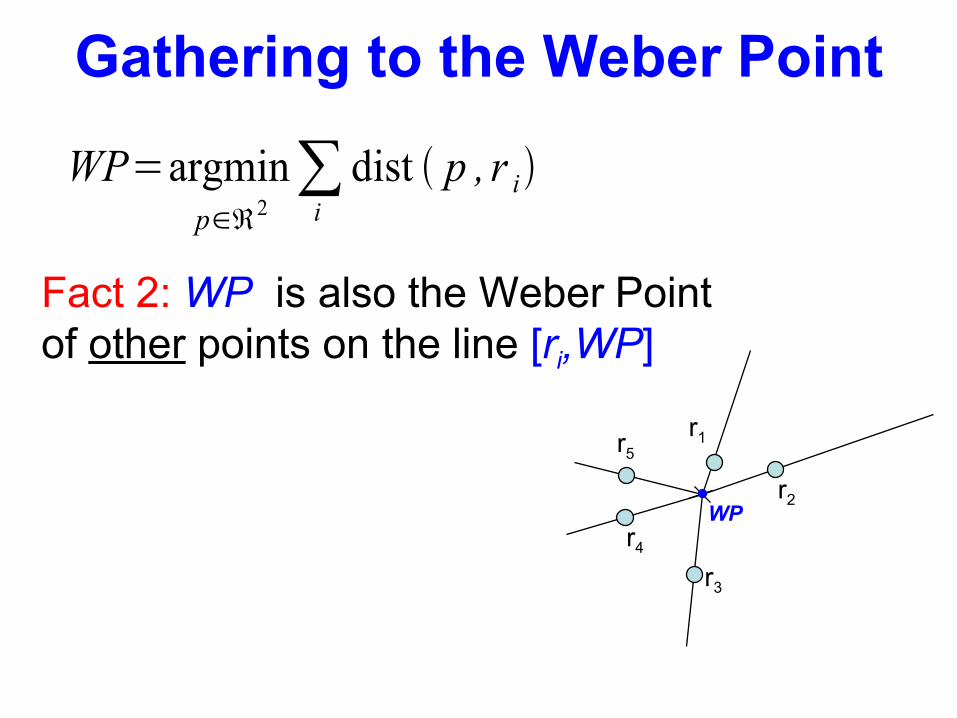
Gathering to the Weber Point
WP=argminp∈ℜ2
∑i
dist p , r i
Fact 2: WP is also the Weber Point of other points on the line [ri,WP]
r4
r2
r1r5
r3
WP
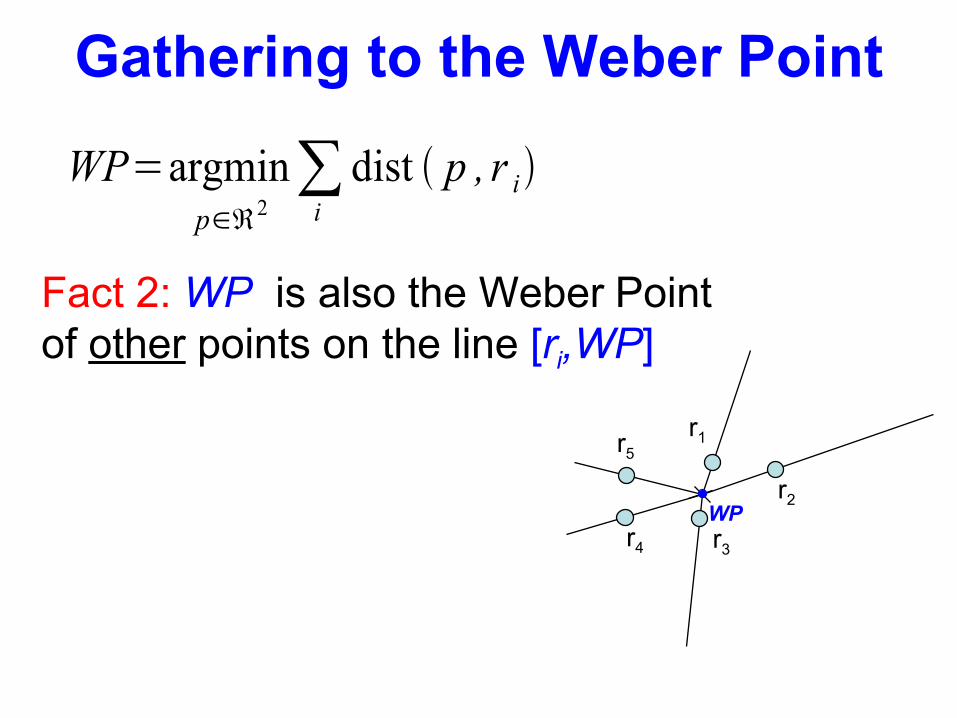
Gathering to the Weber Point
WP=argminp∈ℜ2
∑i
dist p , r i
Fact 2: WP is also the Weber Point of other points on the line [ri,WP]
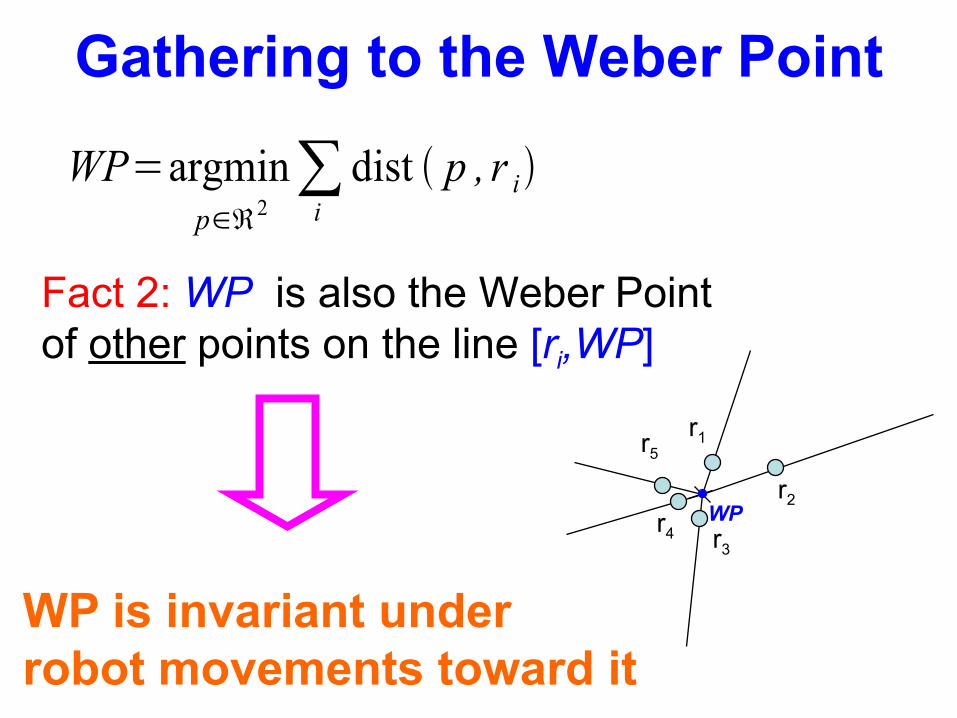
WP is invariant under robot movements toward it
WP
Gathering to the Weber Point
WP=argminp∈ℜ2
∑i
dist p , r i
r1
r2
r3
r5
r4
Fact 2: WP is also the Weber Point of other points on the line [ri,WP]
Proposed gathering algorithm: • Compute Weber point WP• Move Towards WP
Gathering to the Weber Point
Problem: WP is not computable… (even for N=5)
Gathering to the Weber Point
Gathering in the SSYNC Model
Thm 1 [Suzuki, Yamashita, 96;
Ando, Oasa, Suzuki, Yamashita, 99] :
For N=2, the problem is unsolvable
Gathering Two Robots - Illustrating the difficulty
In FSYNC model: Go to middle point.
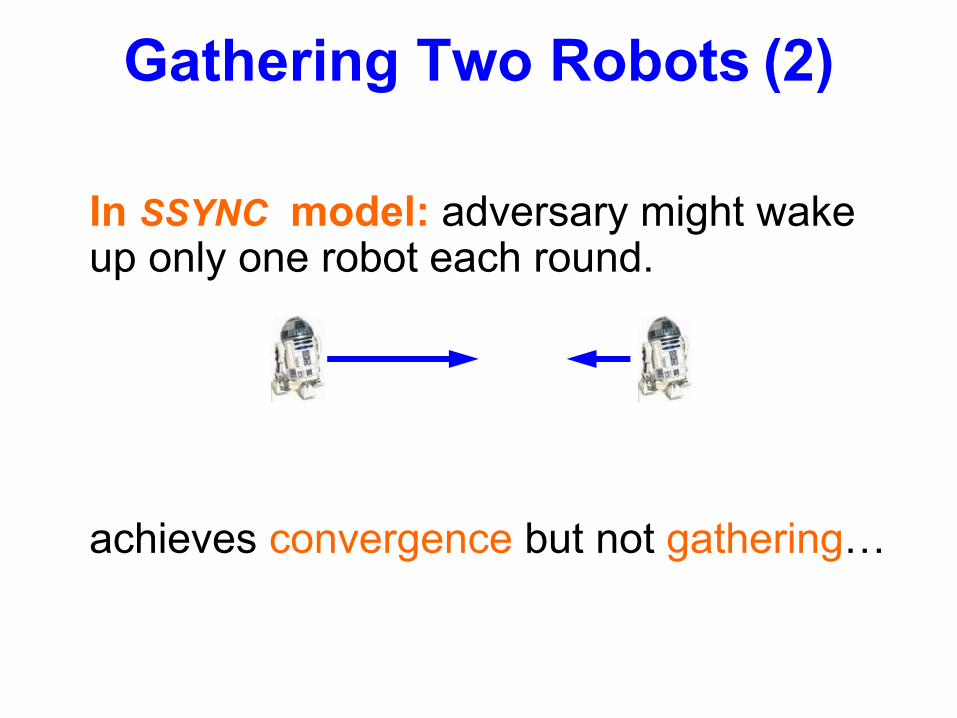
Gathering Two Robots (2)
In SSYNC model: adversary might wake up only one robot each round.
achieves convergence but not gathering…
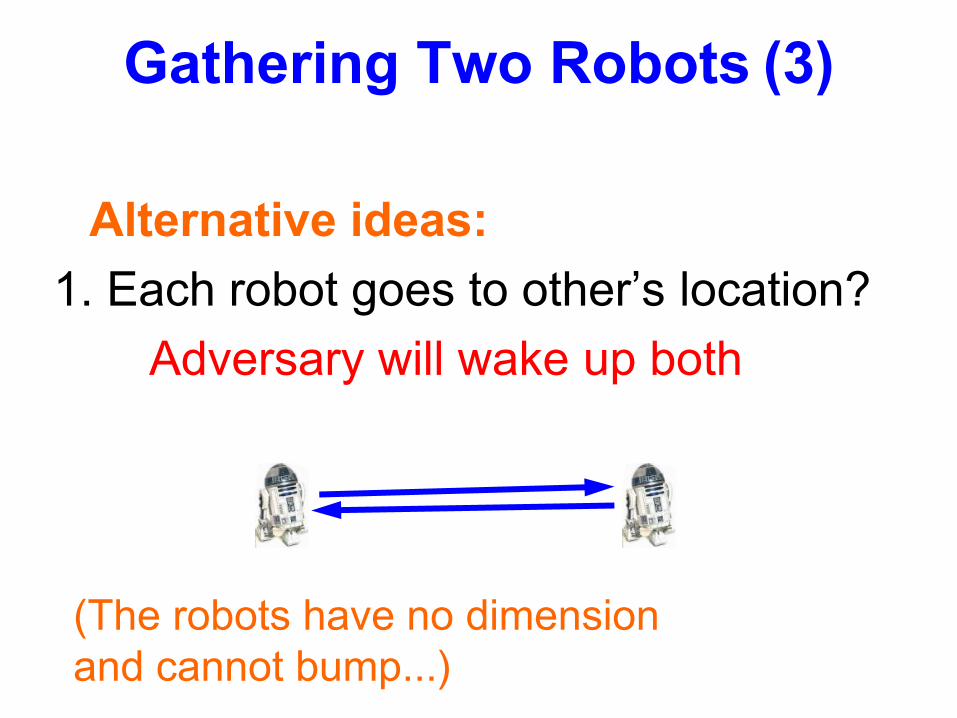
Gathering Two Robots (3)
Alternative ideas:
1. Each robot goes to other’s location?
Adversary will wake up both
(The robots have no dimension and cannot bump...)
Gathering Two Robots (4)
Alternative ideas:
2. One robot goes, one stays?
Adversary will wake up the staying.(besides, this solution is non-uniform)
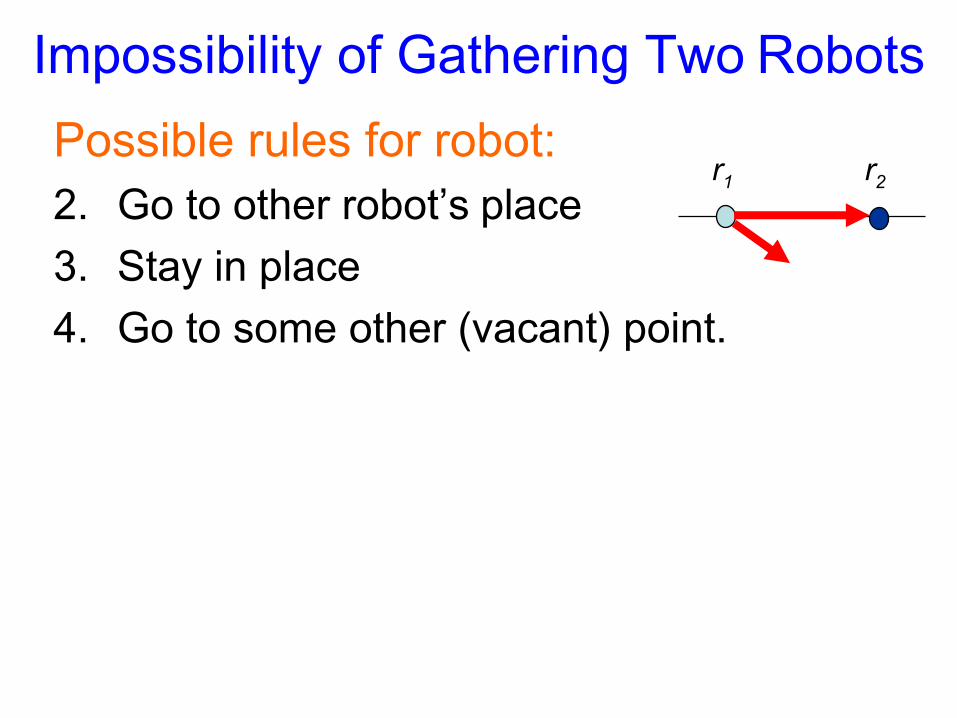
Impossibility of Gathering Two Robots
Possible rules for robot:2. Go to other robot’s place
3. Stay in place
4. Go to some other (vacant) point.
r2r1
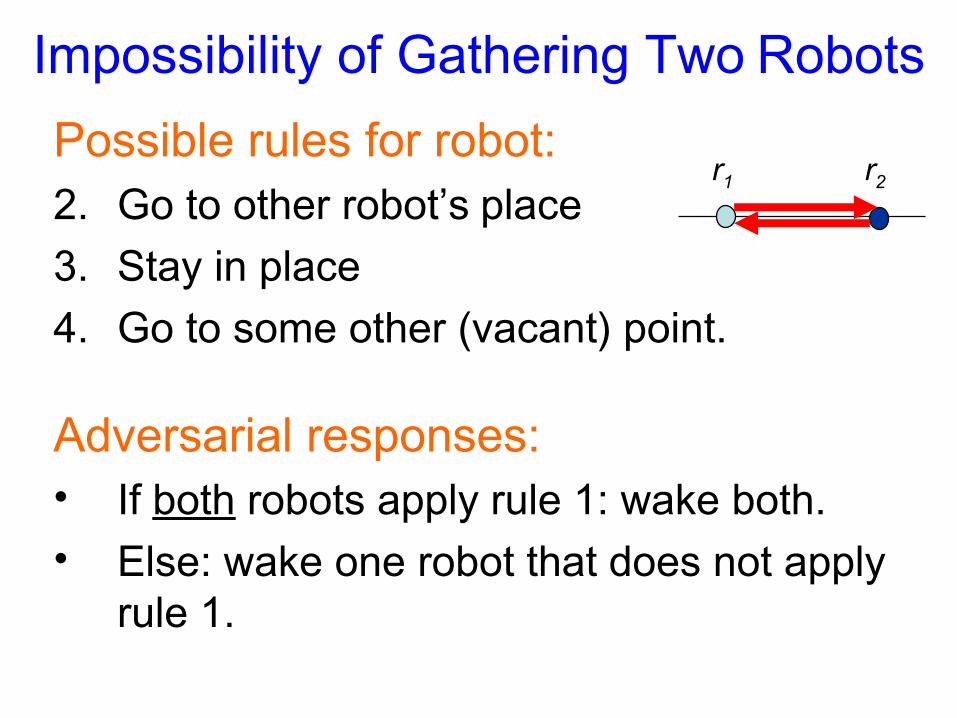
Impossibility of Gathering Two Robots
Possible rules for robot:2. Go to other robot’s place
3. Stay in place
4. Go to some other (vacant) point.
Adversarial responses:• If both robots apply rule 1: wake both.• Else: wake one robot that does not apply
rule 1.
r2r1
But …
Randomization can help…
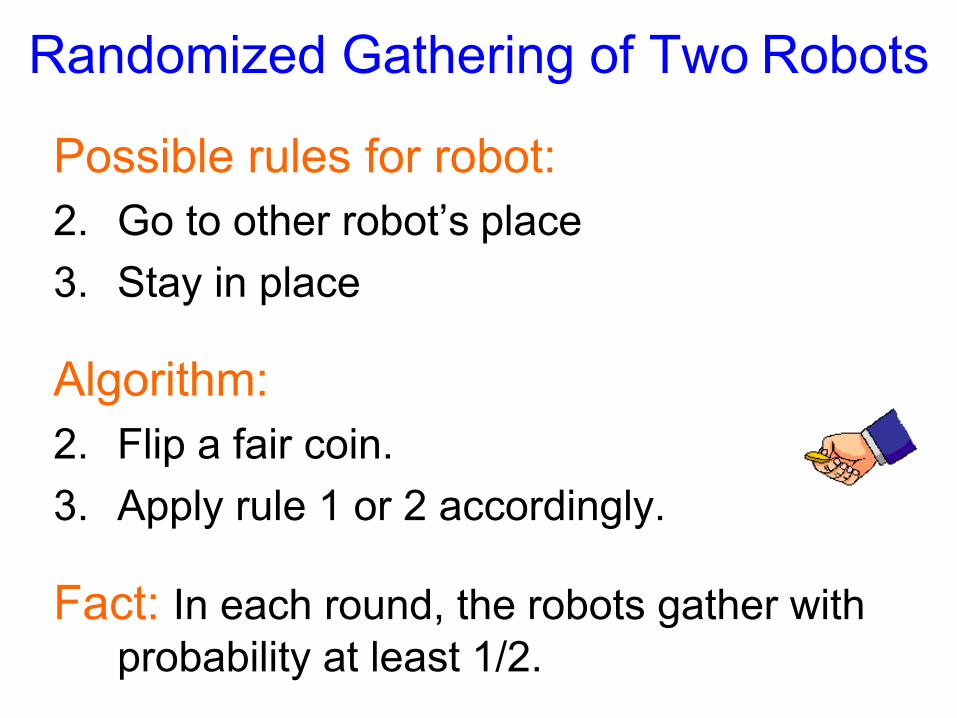
Randomized Gathering of Two Robots
Possible rules for robot:2. Go to other robot’s place
3. Stay in place
Algorithm:2. Flip a fair coin.
3. Apply rule 1 or 2 accordingly.
Fact: In each round, the robots gather with probability at least 1/2.
Gathering in the SSYNC Model
Thm 2 [Suzuki, Yamashita, 96;
Ando, Oasa, Suzuki, Yamashita, 99] :
For N=3,4, the problem is solvable
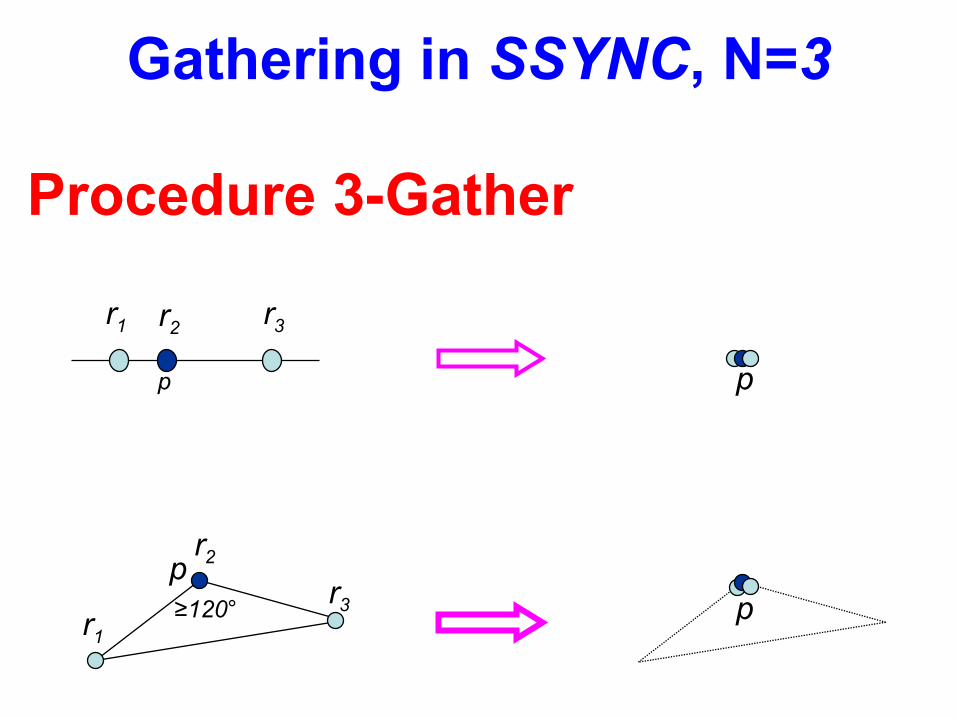
Gathering in SSYNC, N=3
r2r1 r3
p p
r2
r3r1
p≥120° p
Procedure 3-Gather
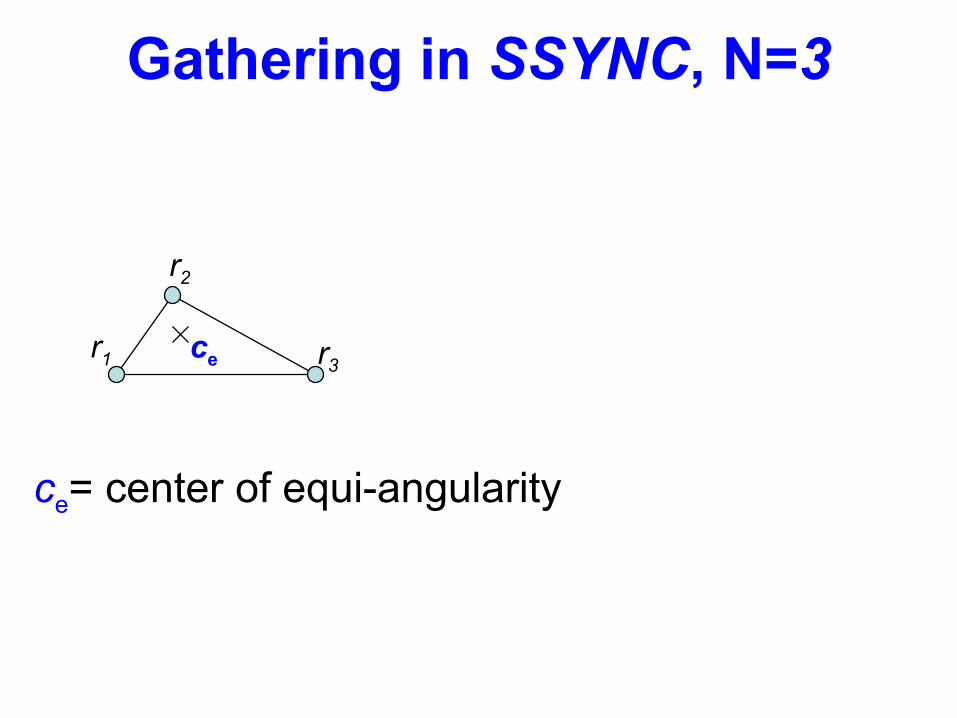
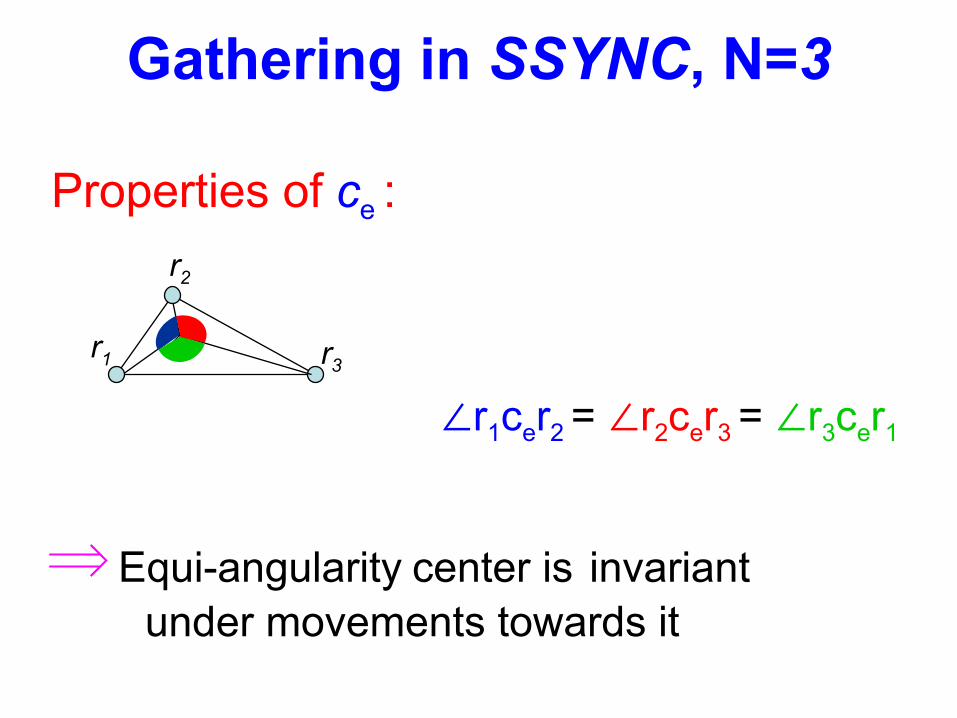
ce r3r1
r2
ce= center of equi-angularity
Gathering in SSYNC, N=3
r3r1
r2
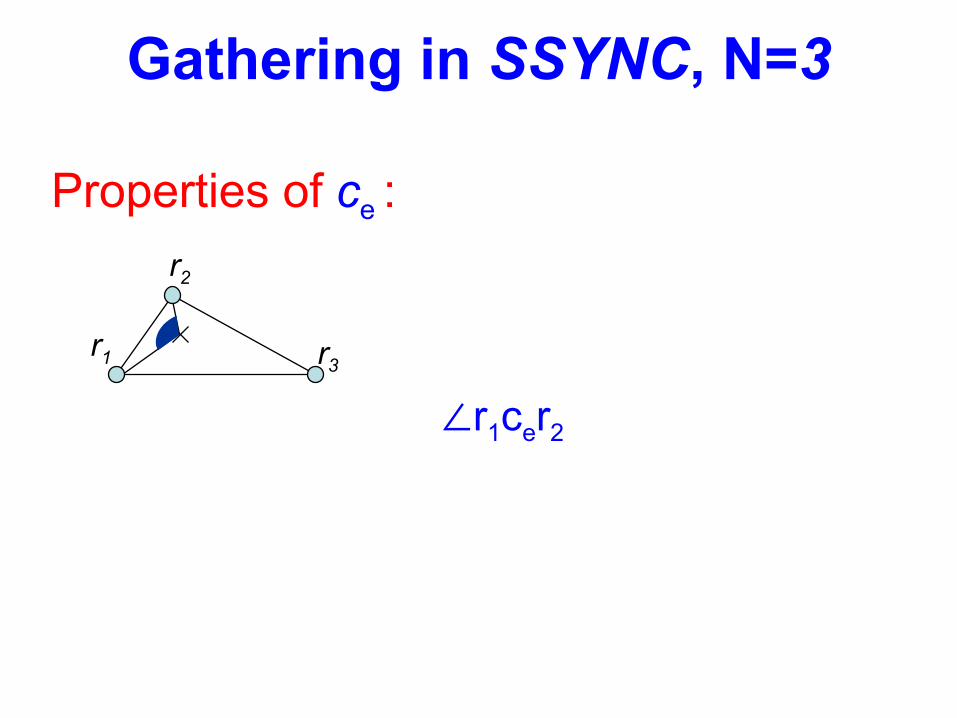
Gathering in SSYNC, N=3
∠r1cer2
Properties of ce :
r3r1
r2
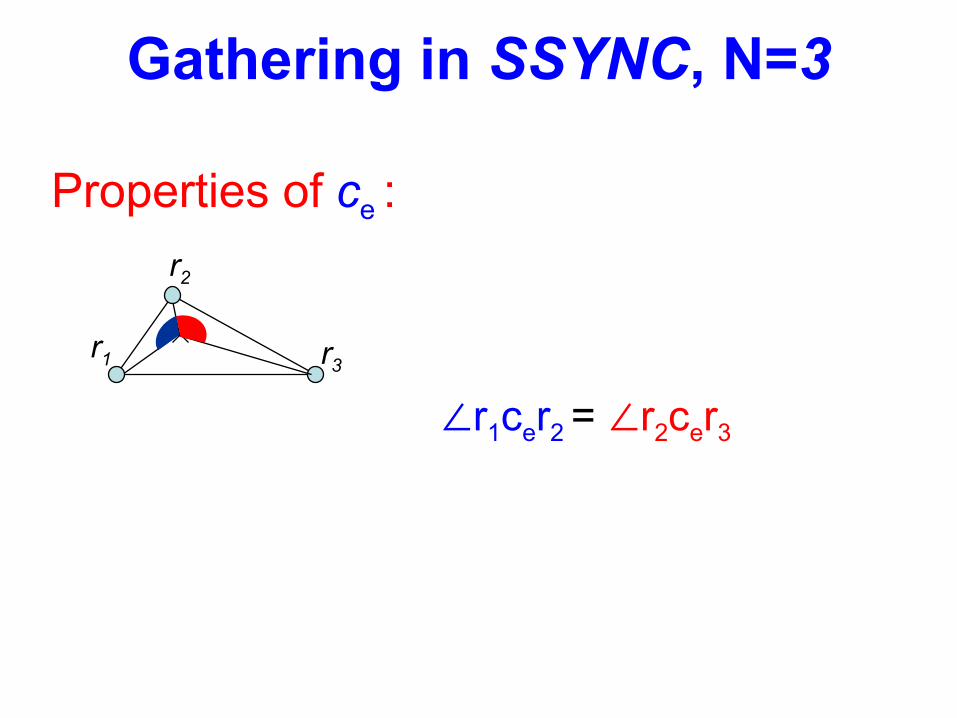
Gathering in SSYNC, N=3
∠r1cer2 = ∠r2cer3
Properties of ce :
Gathering in SSYNC, N=3
∠r1cer2 = ∠r2cer3 = ∠r3cer1
r3r1
r2
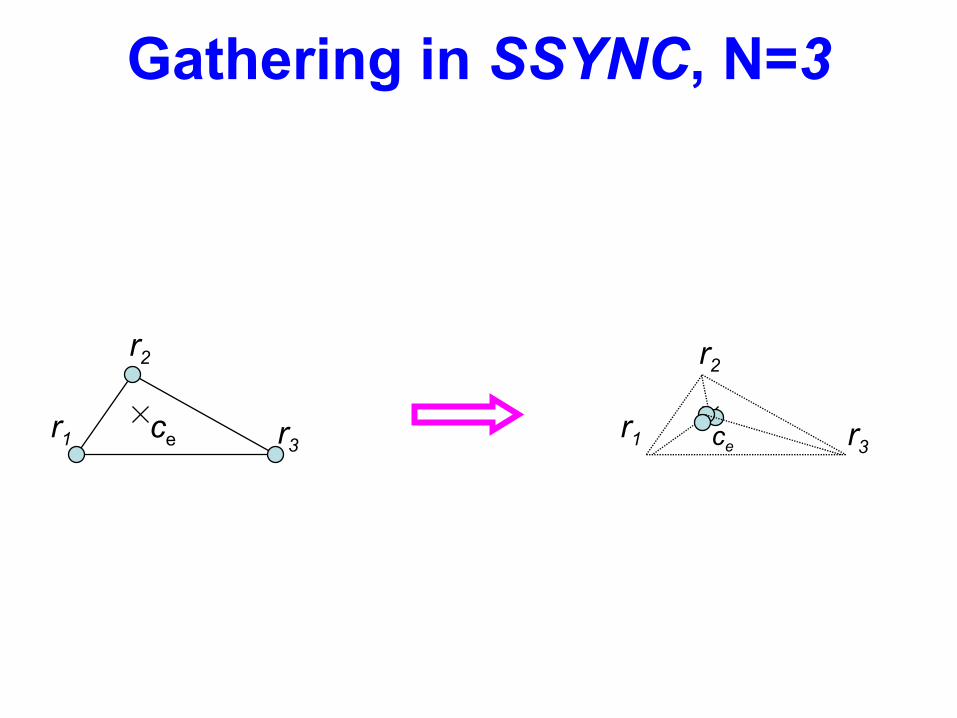
⇒ Equi-angularity center is invariantunder movements towards it
Properties of ce :
r3r1
r2
ce
Gathering in SSYNC, N=3
ce r3r1
r2
r3r1
r2
r3r1
r2
r2r1 r3
p p
r2
r3
r1
p≥120° p
ce
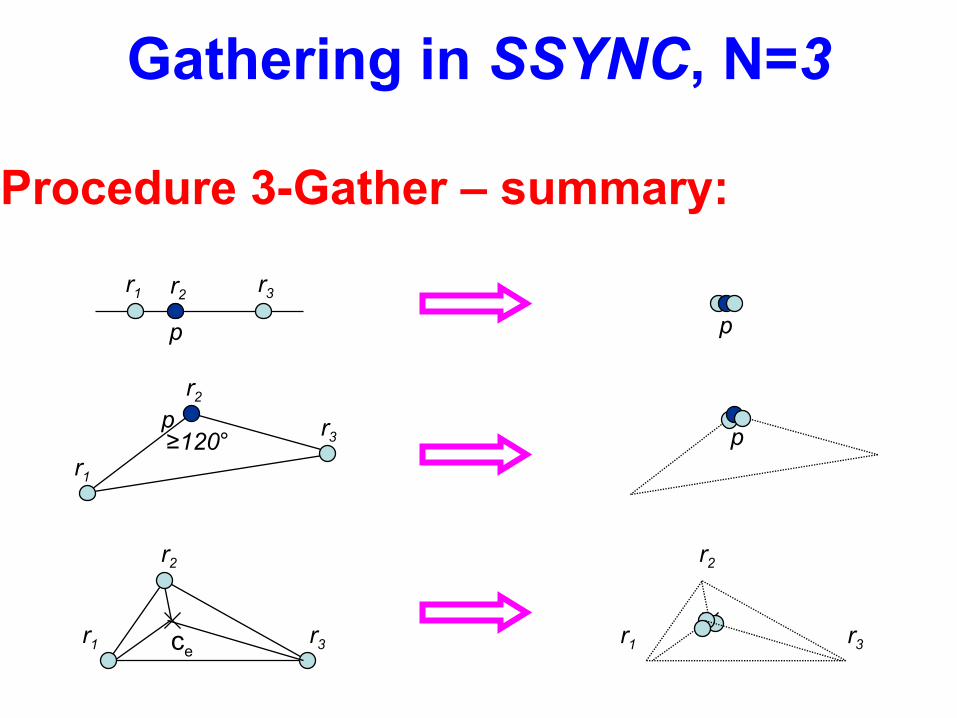
Gathering in SSYNC, N=3
Procedure 3-Gather – summary:
Gathering in SSYNC (N≥3)
Multiplicity point: point p* where two or more robots reside
(Algorithm from [Agmon,Peleg,04] )
By assumption: • Initially, there are no multiplicity points
(namely, each robot is in a distinct location)• Robots can detect multiplicity
Gathering in SSYNC (N≥3)
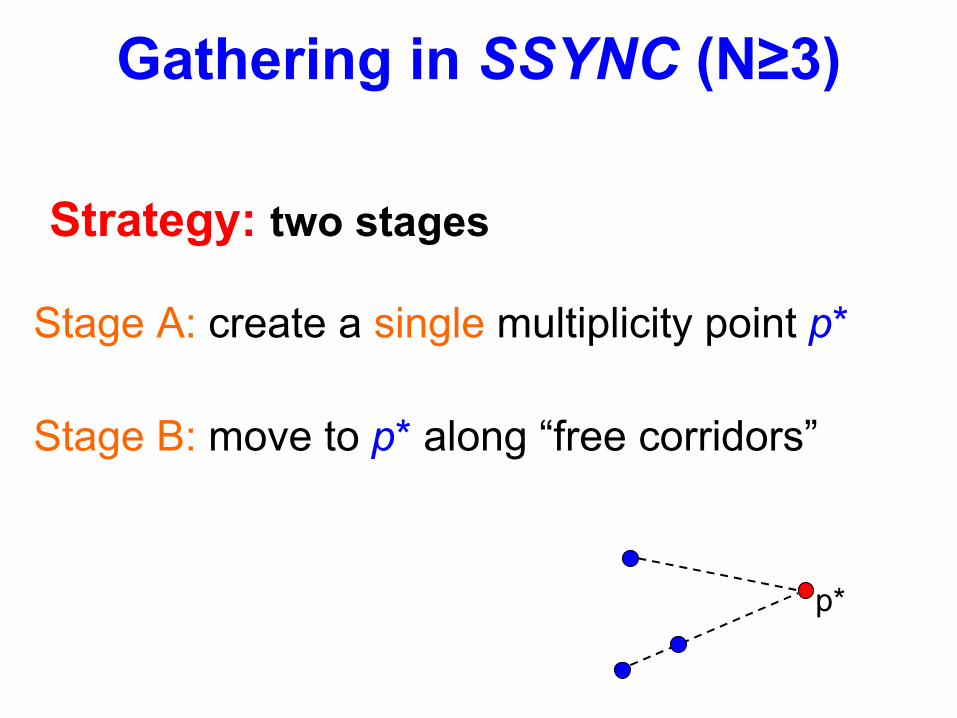
Stage A: create a single multiplicity point p*
Stage B: move to p* along “free corridors”
Strategy: two stages
p*
Gathering in SSYNC (N≥3)
Note: If two or more multiplicity points occur,
then the problem becomes unsolvable
(cannot break symmetry, similar to N=2 case)
Gathering in SSYNC (N≥3)
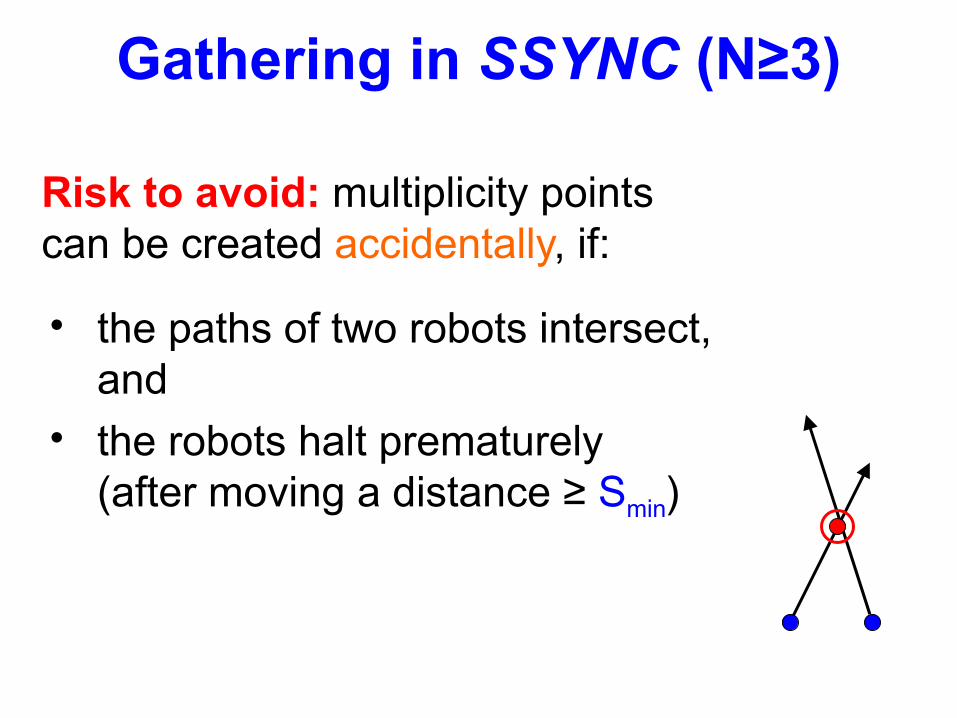
Risk to avoid: multiplicity points can be created accidentally, if:
• the paths of two robots intersect, and
• the robots halt prematurely (after moving a distance ≥ Smin)
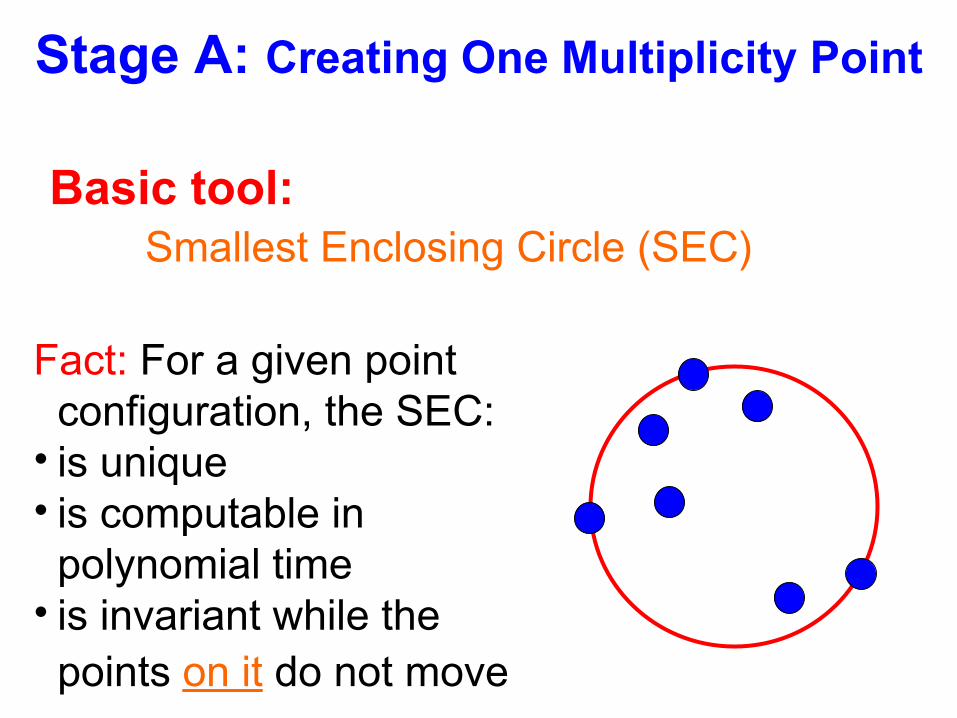
Basic tool: Smallest Enclosing Circle (SEC)
Stage A: Creating One Multiplicity Point
Fact: For a given point configuration, the SEC:
• is unique• is computable in
polynomial time• is invariant while the
points on it do not move
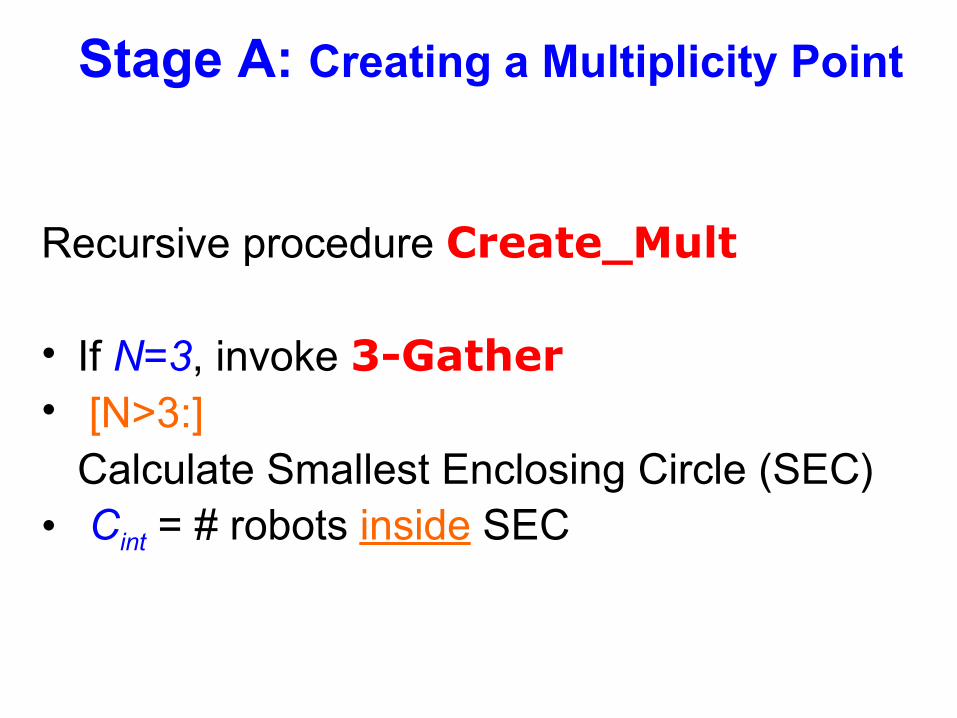
Stage A: Creating a Multiplicity Point
Recursive procedure Create_Mult
• If N=3, invoke 3-Gather• [N>3:]
Calculate Smallest Enclosing Circle (SEC)• Cint = # robots inside SEC
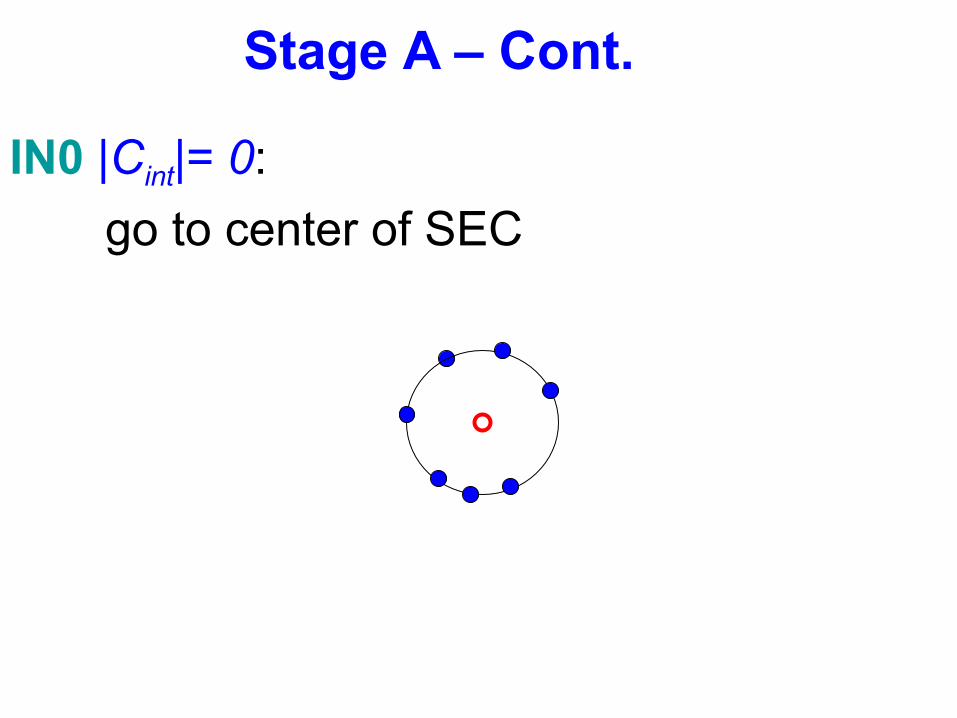
IN0 |Cint|= 0:
go to center of SEC
Stage A – Cont.
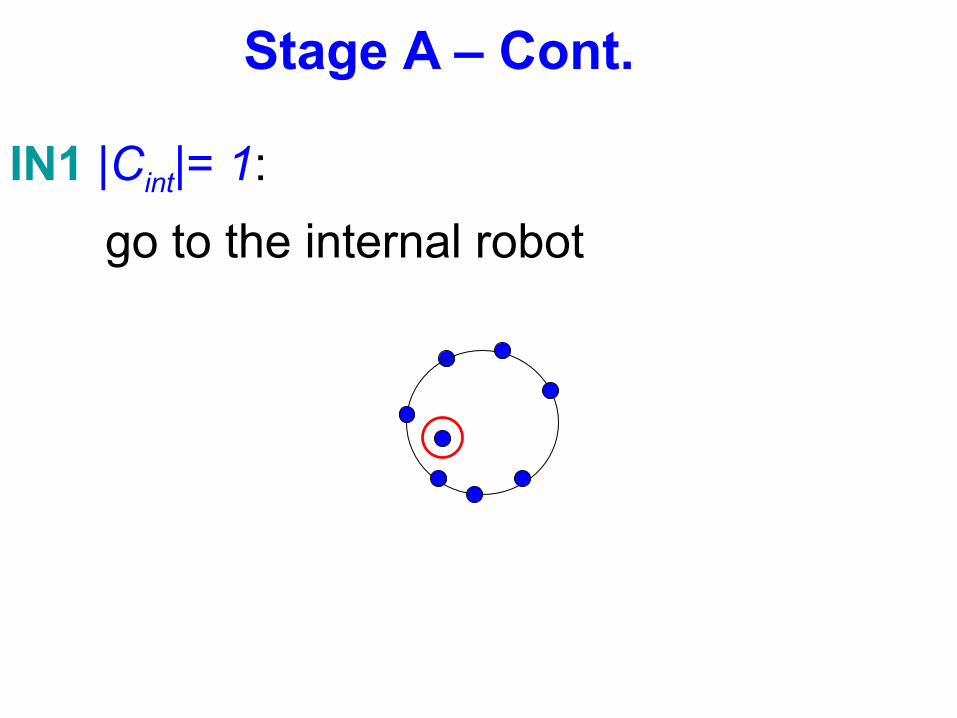
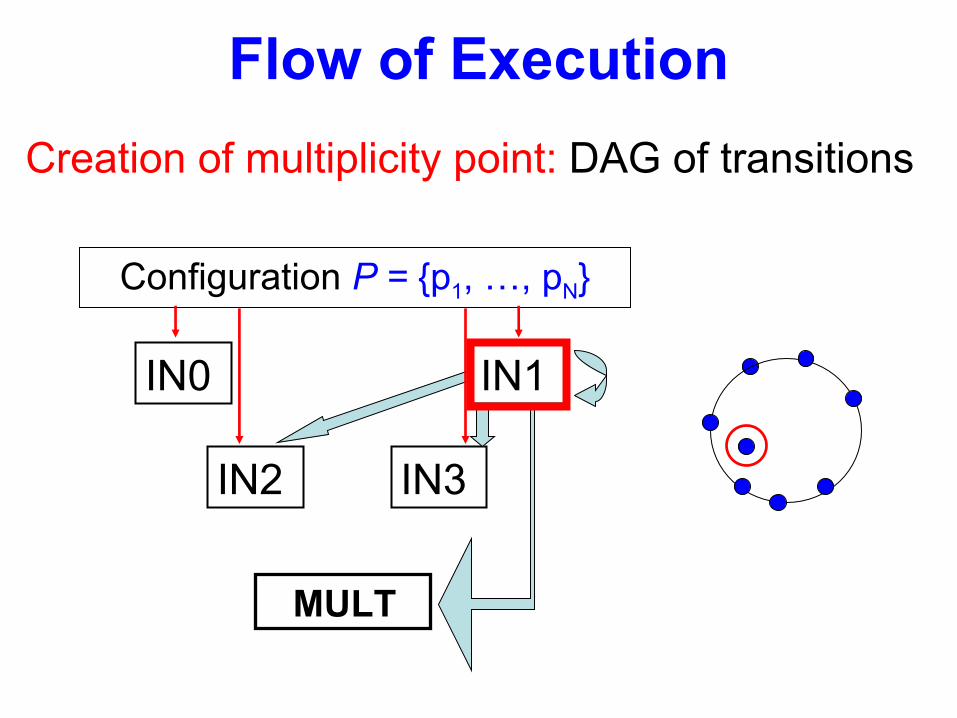
IN1 |Cint|= 1:
go to the internal robot
Stage A – Cont.
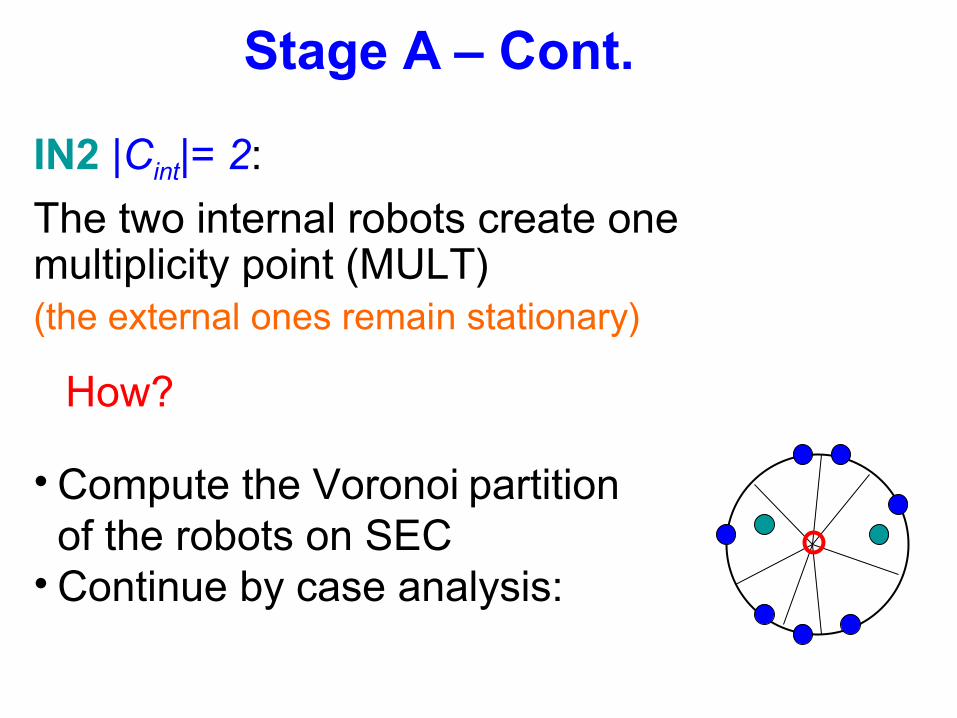
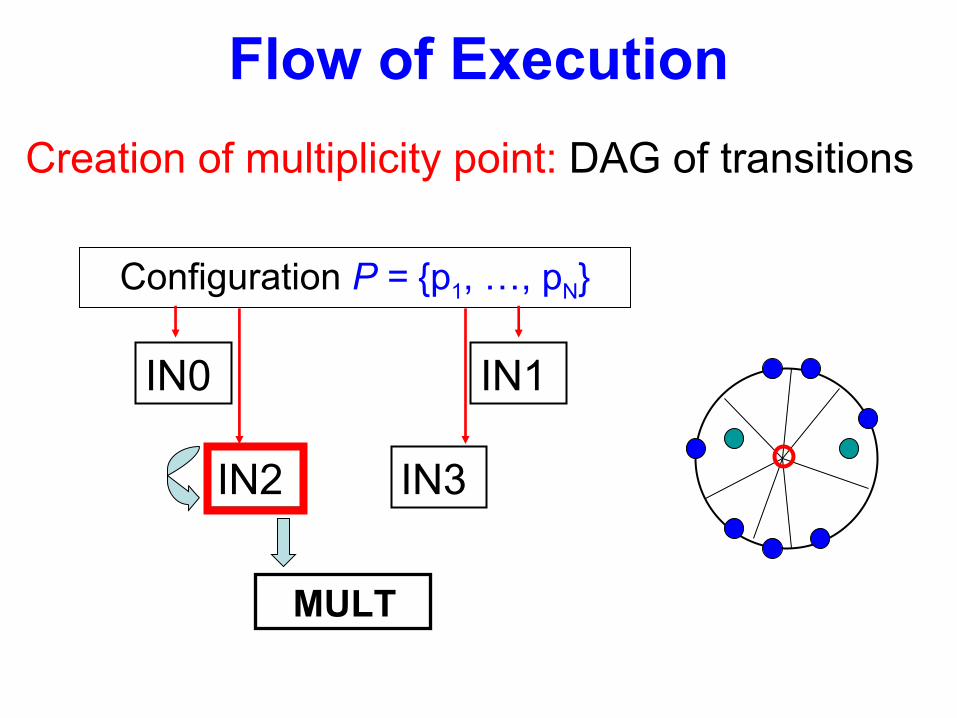
IN2 |Cint|= 2:
The two internal robots create one multiplicity point (MULT) (the external ones remain stationary)
Stage A – Cont.
• Compute the Voronoi partition of the robots on SEC
• Continue by case analysis:
How?
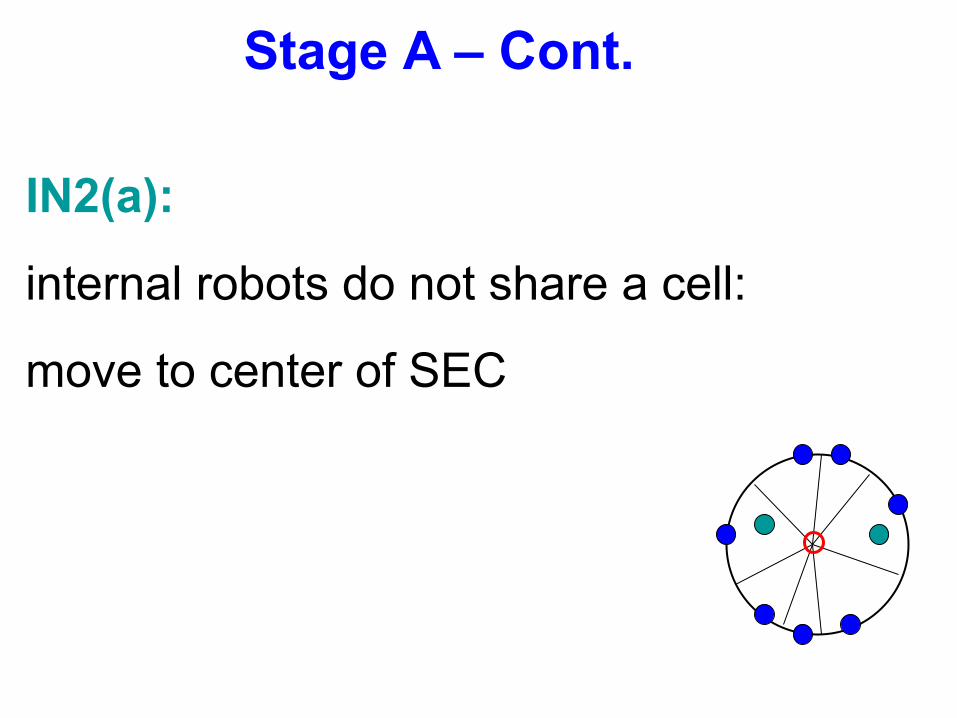
Stage A – Cont.
IN2(a):
internal robots do not share a cell:
move to center of SEC
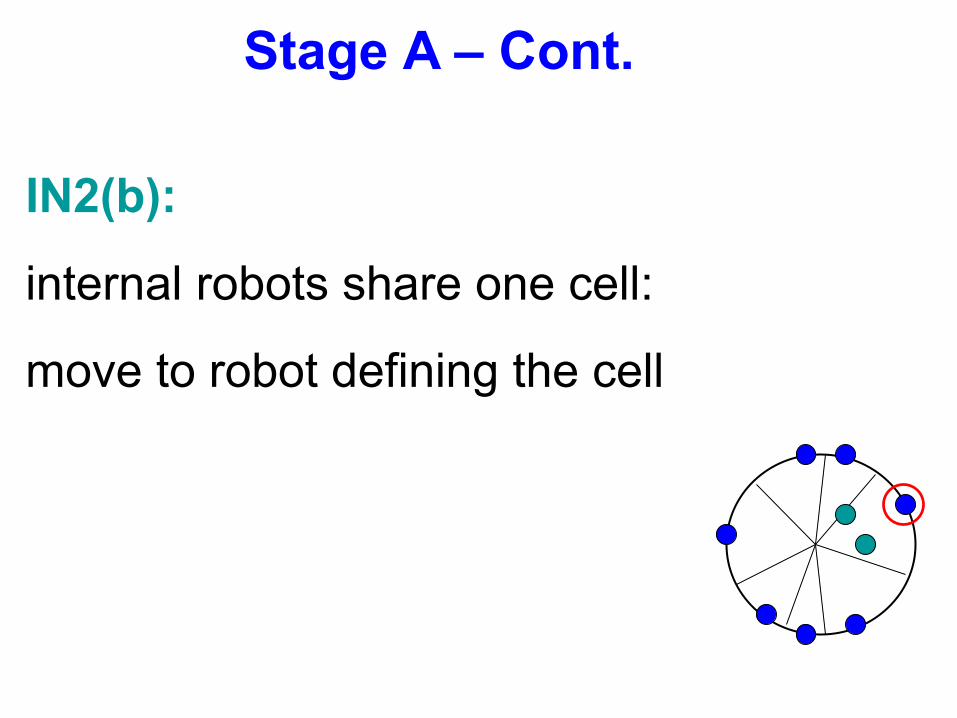
Stage A – Cont.
IN2(b):
internal robots share one cell:
move to robot defining the cell
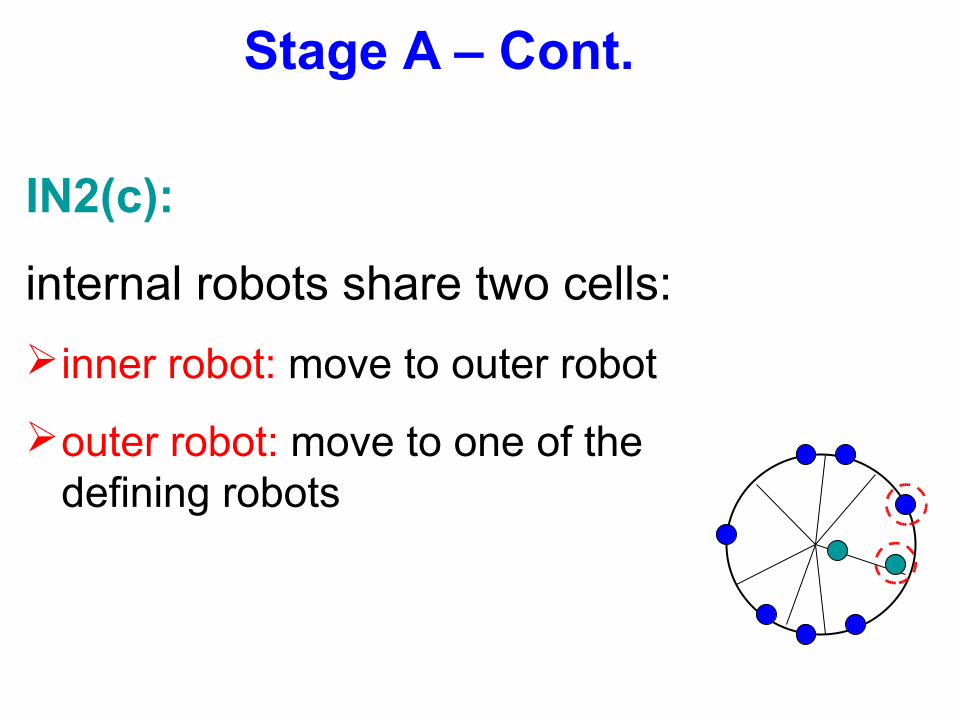
Stage A – Cont.
IN2(c):
internal robots share two cells:
inner robot: move to outer robot
outer robot: move to one of the defining robots
Stage A – Cont.
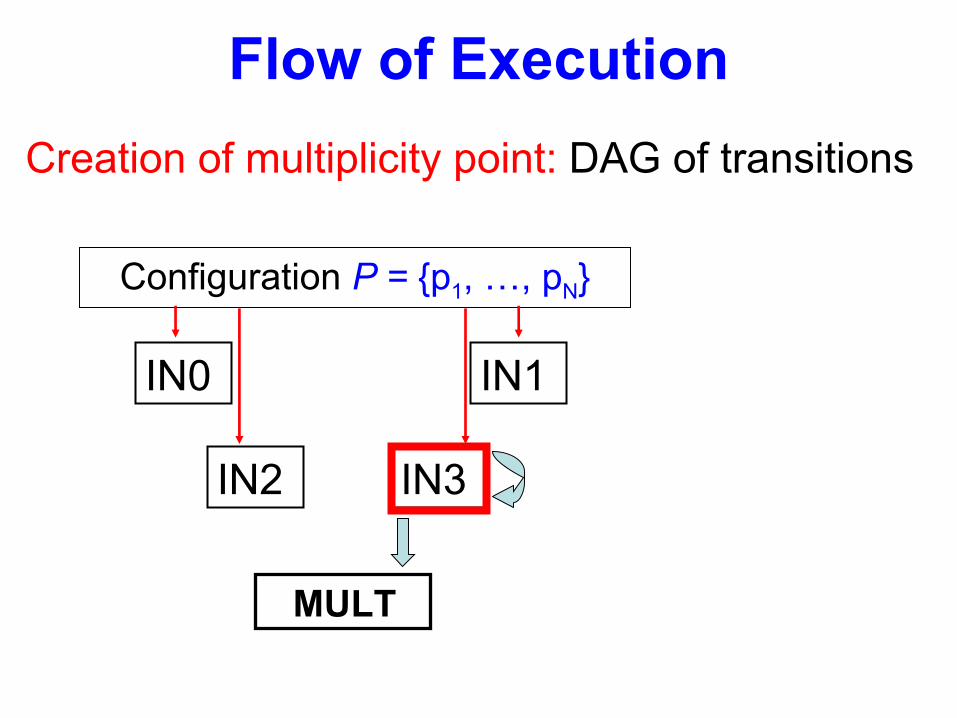
IN3 |Cint| ≥ 3:
invoke procedure recursively
for internal robots
(external robots remain stationary)
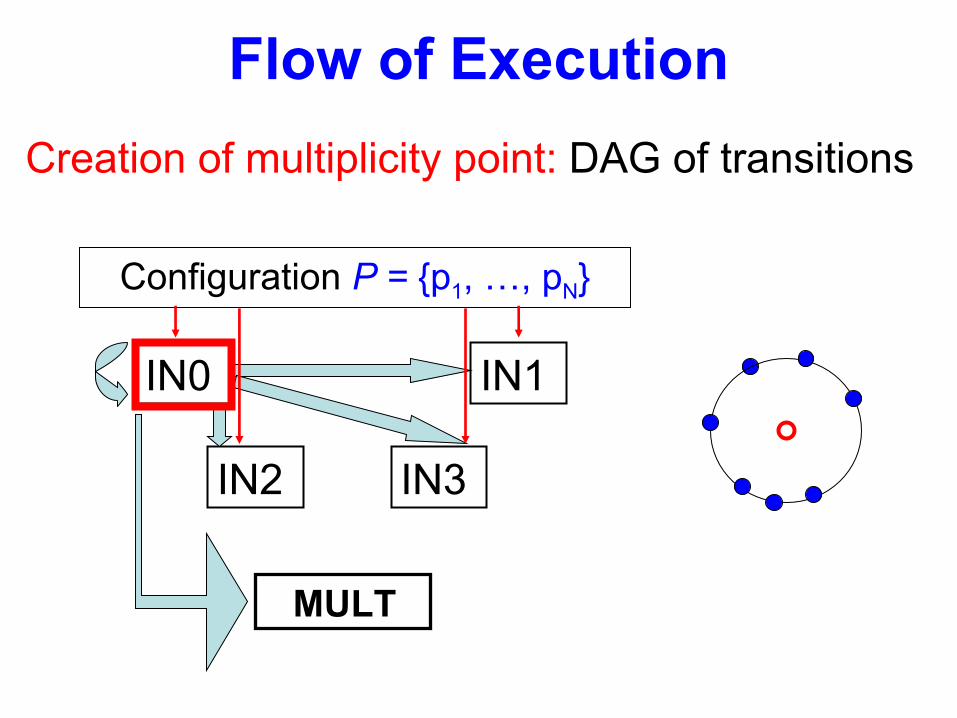
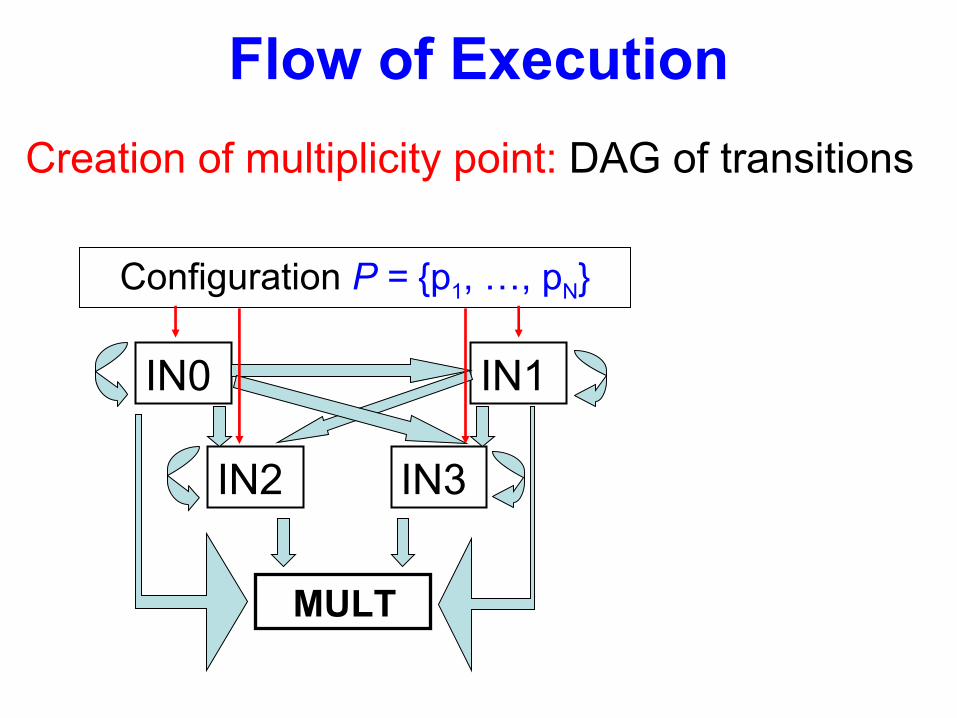
Flow of Execution
Creation of multiplicity point: DAG of transitions
Configuration P = {p1, …, pN}
IN0
IN2
IN1
IN3
MULT
Flow of Execution
Creation of multiplicity point: DAG of transitions
Configuration P = {p1, …, pN}
IN0
IN2
IN1
IN3
MULT
Flow of Execution
Creation of multiplicity point: DAG of transitions
Configuration P = {p1, …, pN}
IN0
IN2
IN1
IN3
MULT
Flow of Execution
Creation of multiplicity point: DAG of transitions
Configuration P = {p1, …, pN}
IN0
IN2
IN1
IN3
MULT
Flow of Execution
Creation of multiplicity point: DAG of transitions
Configuration P = {p1, …, pN}
IN0
IN2
IN1
IN3
MULT
Flow of Execution (cont.)
Note:
The trajectories of robots moving towards pG never intersect
robots will never create additional multiplicity points on their way to pG
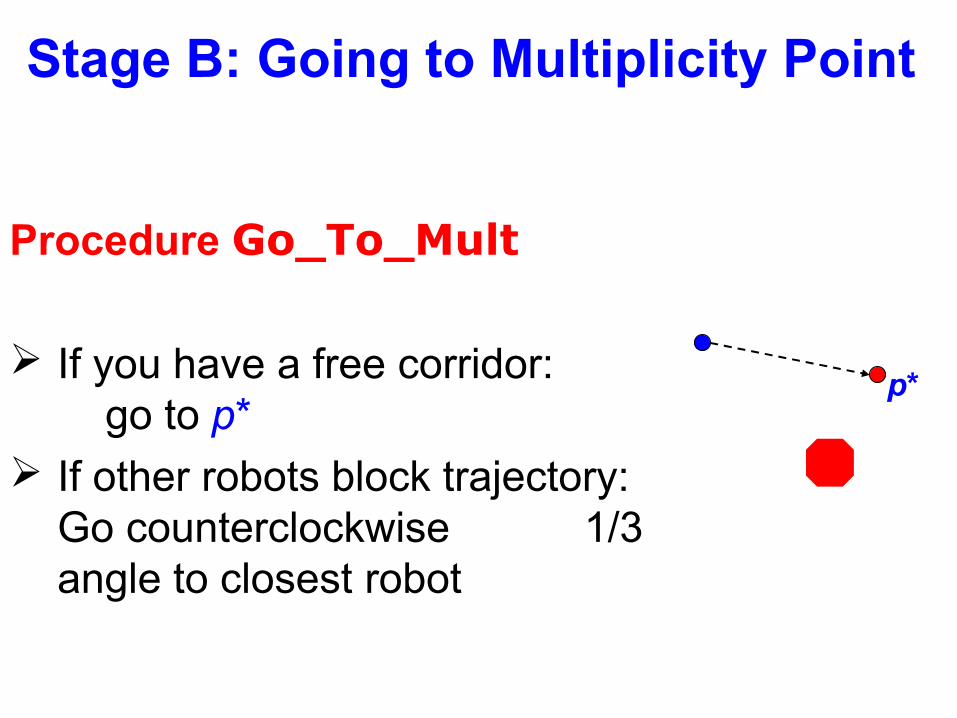
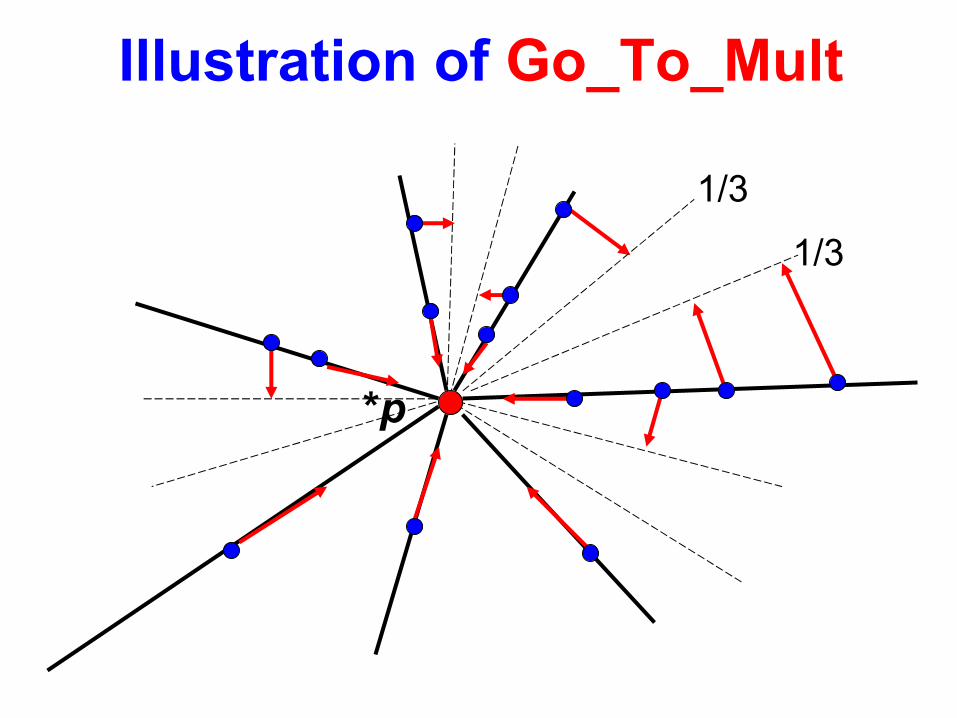
Stage B: Going to Multiplicity Point
Procedure Go_To_Mult
If you have a free corridor:go to p*
If other robots block trajectory:Go counterclockwise 1/3 angle to closest robot
p*
*p
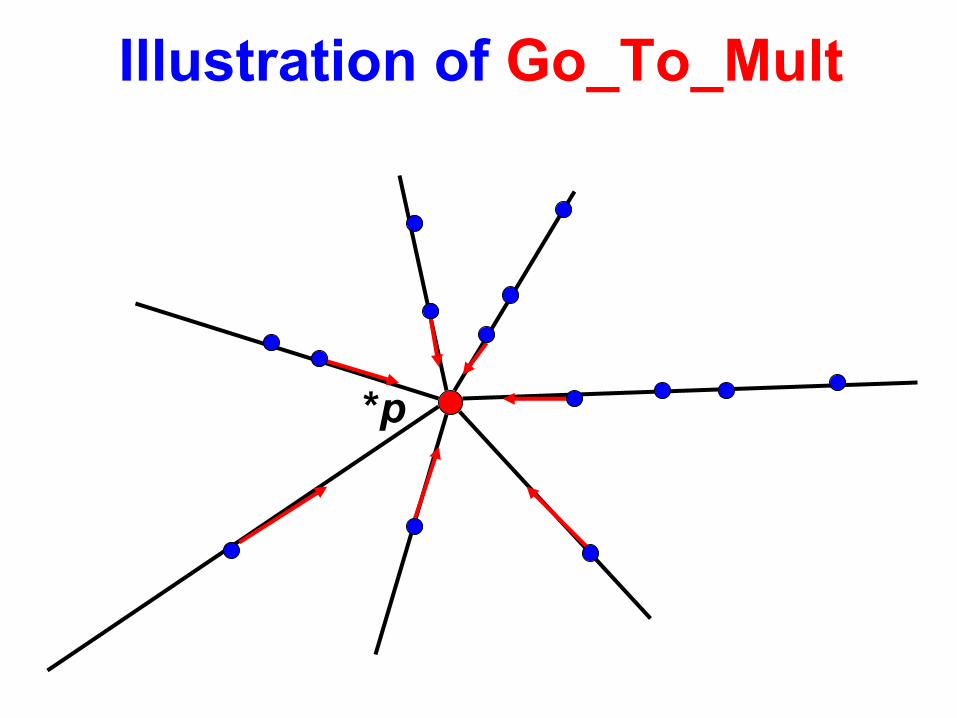
Illustration of Go_To_Mult
*p
1/3
1/3
Illustration of Go_To_Mult
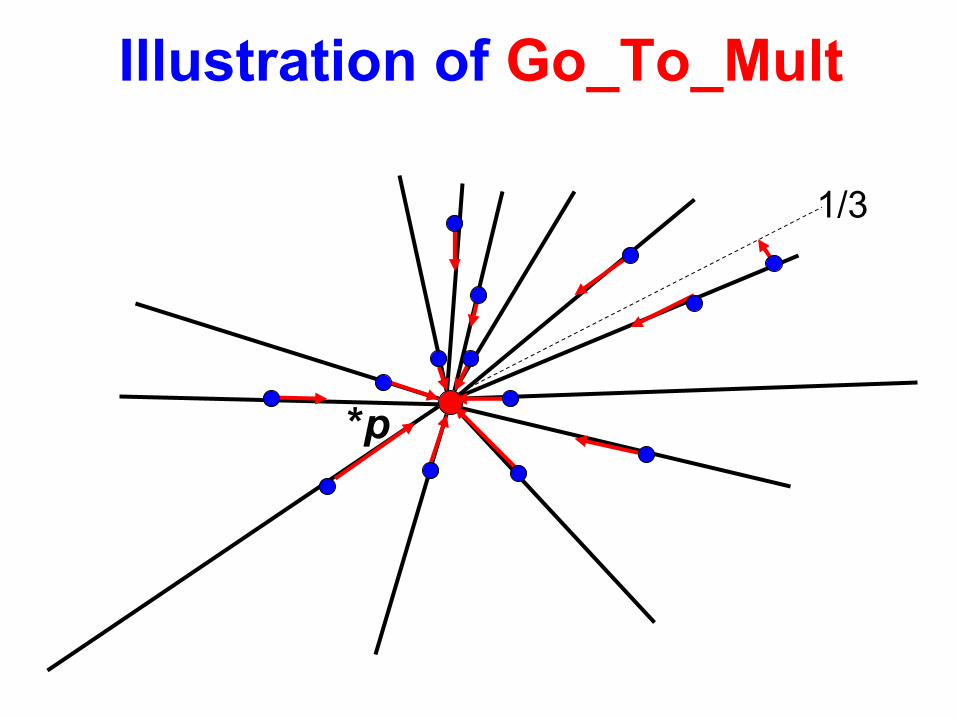
Illustration of Go_To_Mult
*p
1/3
Recall: Complete asynchrony:• robots operate in different and variable rates• robots may have arbitrary wait periods
between cycles
Gathering in ASYNC
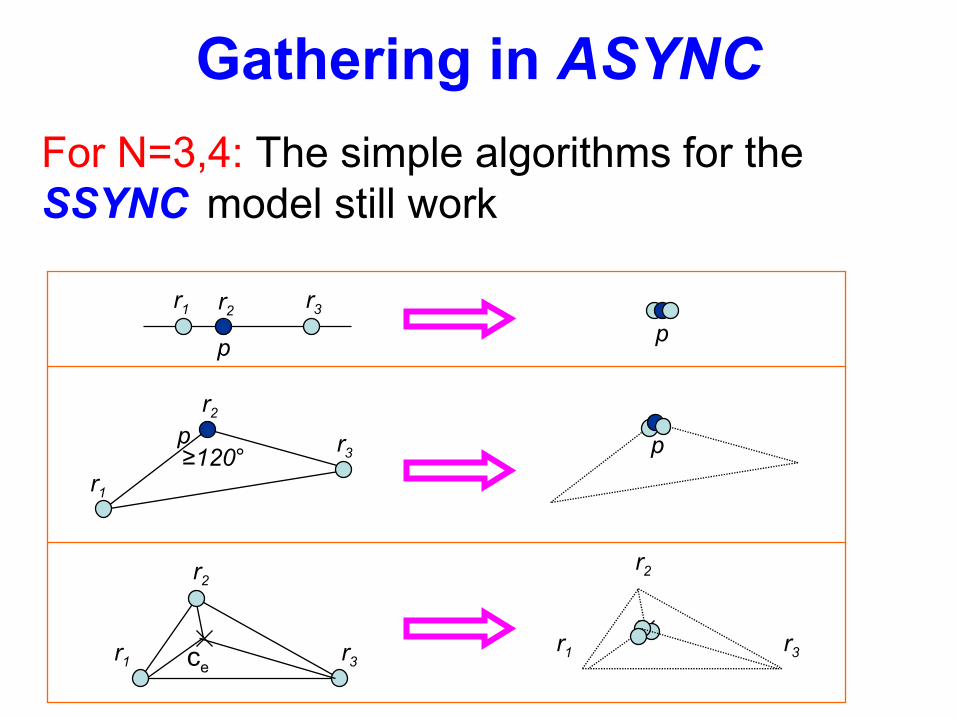
For N=3,4: The simple algorithms for the SSYNC model still work
Gathering in ASYNC
r3r1
r2
r3r1
r2
r2r1 r3
pp
r2
r3
r1
p≥120° p
ce
Gathering in ASYNC (N≥3)
Easier models: • Common coordinate system• Non-oblivious robots (even without
multiplicity detection) [Cieliebak, 04]
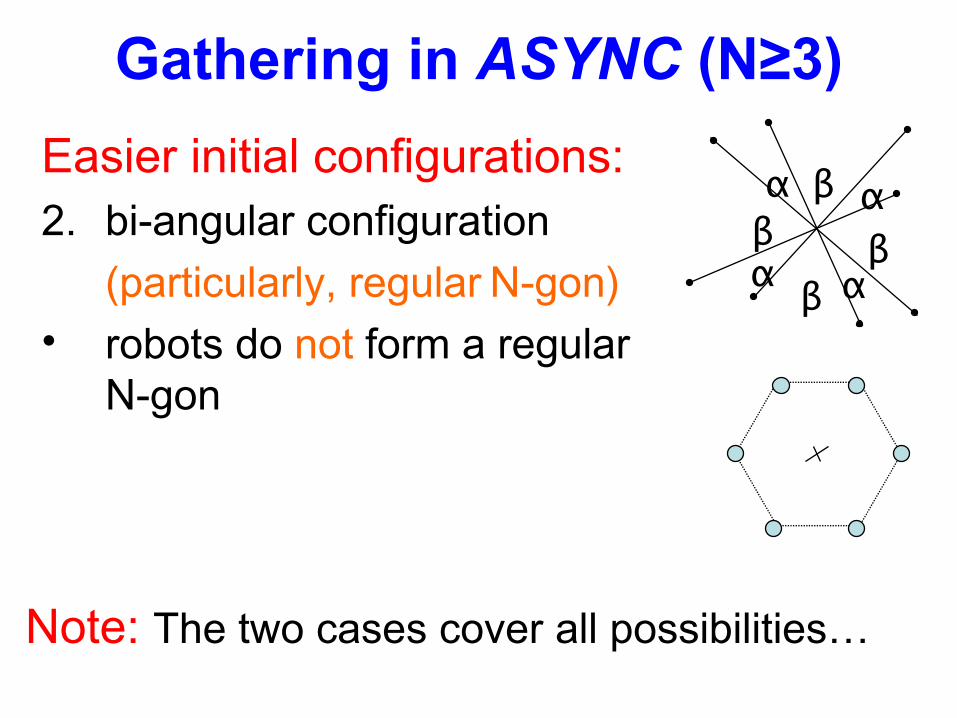
Gathering in ASYNC (N≥3)
Easier initial configurations: 2. bi-angular configuration
(particularly, regular N-gon)• robots do not form a regular
N-gon
α β
α
α
α ββ β
Note: The two cases cover all possibilities…
Difficulties
If initial configuration is symmetric....
General Algorithm!!
If initial configuration is asymmetric....
Difficulties
....after a while....
DifficultiesIn the ASYNC model....
Symmetric…
General Algorithm…
....hence, they might never gather!!!!
Difficulties
Initially: no multiplicities Eventually, some robots gather at a
point p The algorithm ensures that the
multiplicity point p is unique Subsequently, all robots move to p
[Cieliebak, Flocchini, Prencipe, Santoro, 03]
Gathering in ASYNC (N≥3)
Scheme overview:
• Algorithm handles bi-angular case separately• Algorithm ensures the biangular and general
procedures do not get “mixed up”• Decision process:
If ∃ multiplicity point: move towards itElse If biangular: move to centerElse elect some robots to gather
Gathering in ASYNC (N≥3)
Scheme overview (cont):

Gathering with Limited Visibility
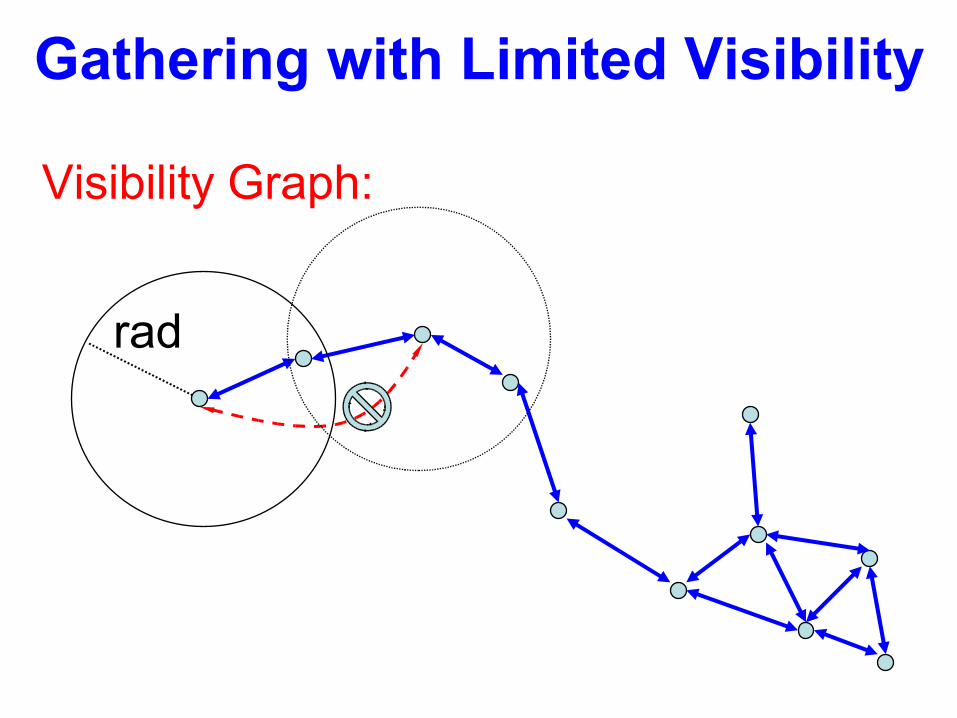
Visibility Graph:
rad
Gathering with Limited Visibility
Necessary Condition: The initial visibility graph must be connected
Correctness Condition: The visibility graph must remain connected during the computation
Gathering with Limited Visibility
[Ando, Oasa, Suzuki,Yamashita, 99]
Solution in SSYNC
Provides only convergence
Solution assuming common knowledge on direction and orientation of both axes
[Flocchini, Prencipe, Santoro, Widmayer, 01]
Solution in ASYNC
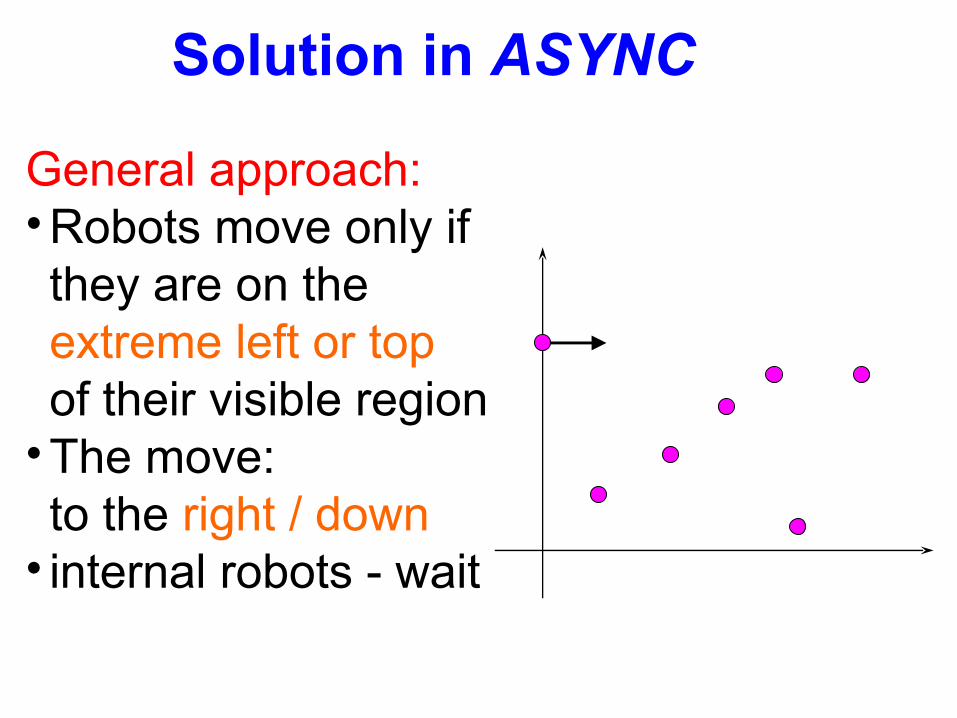
General approach:• Robots move only if they are on the extreme left or top of their visible region
• The move: to the right / down
• internal robots - wait
Solution in ASYNC
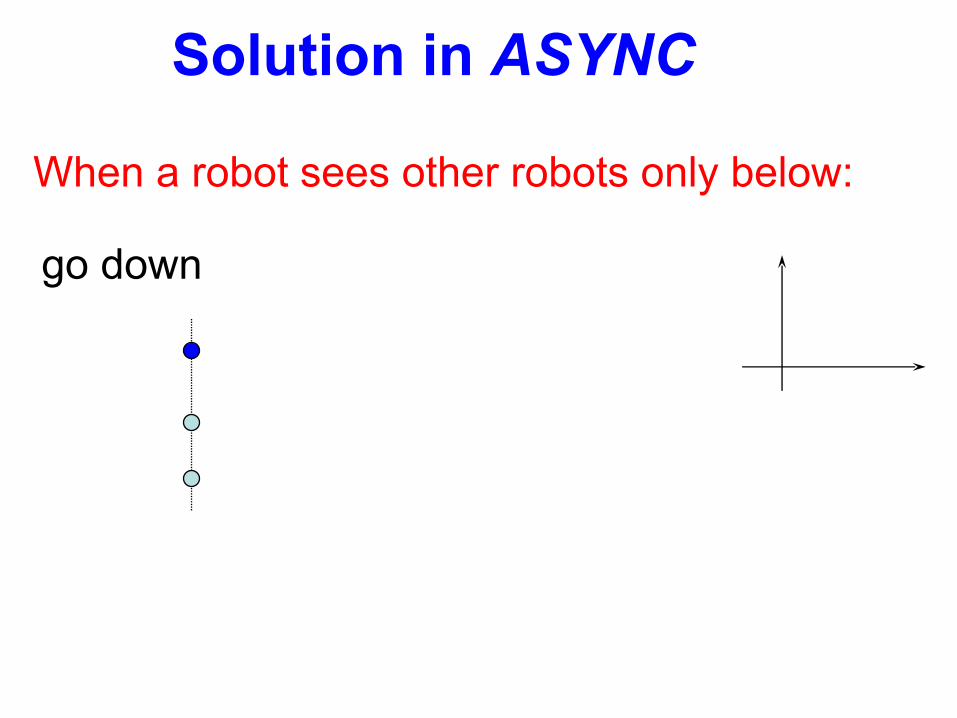
When a robot sees other robots only below:
Solution in ASYNC
go down
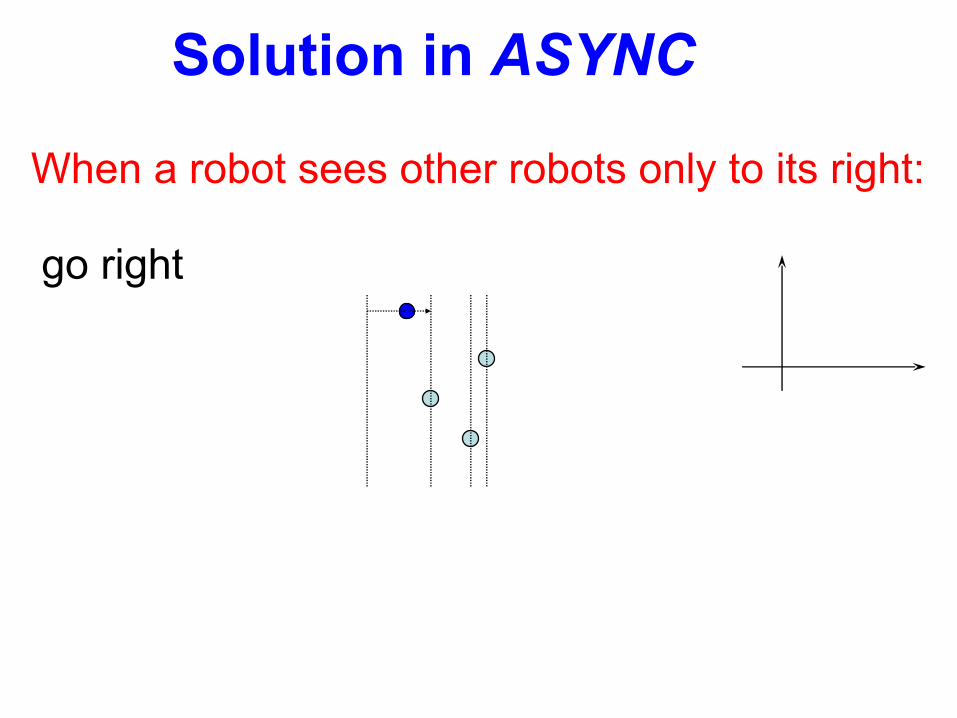
When a robot sees other robots only to its right:
Solution in ASYNC
go right
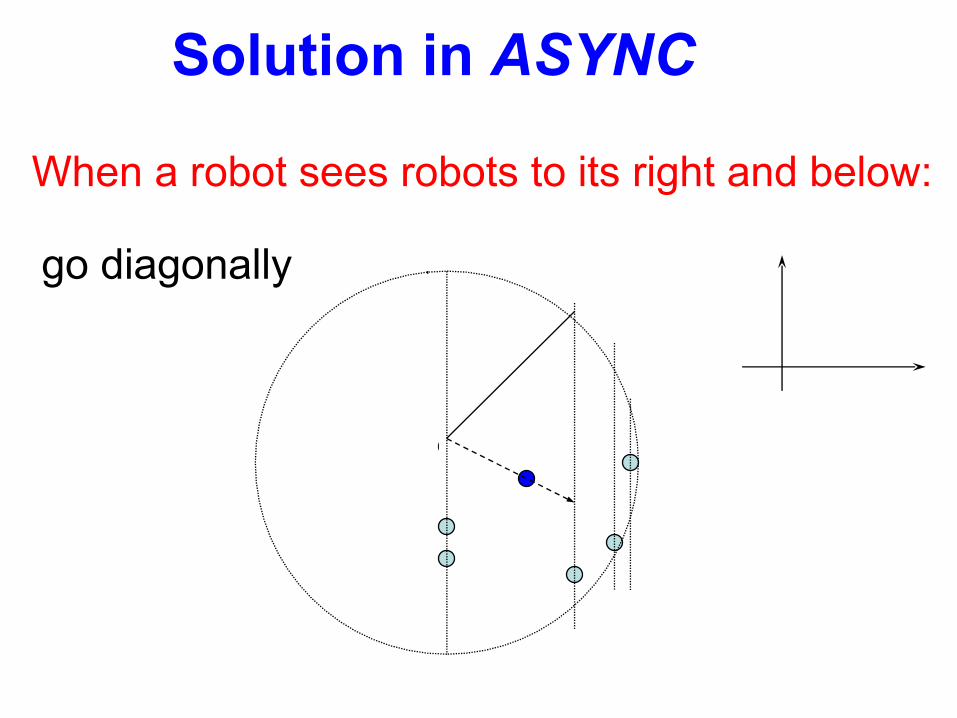
When a robot sees robots to its right and below:
Solution in ASYNC
go diagonally
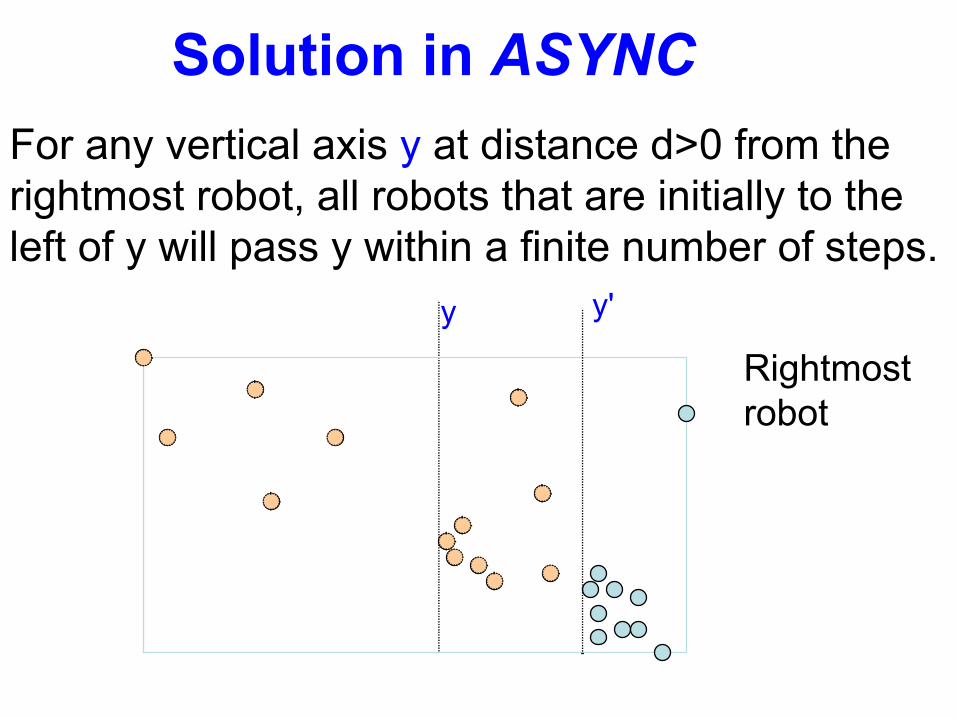
For any vertical axis y at distance d>0 from the rightmost robot, all robots that are initially to the left of y will pass y within a finite number of steps.
y y'
Rightmost robot
Solution in ASYNC
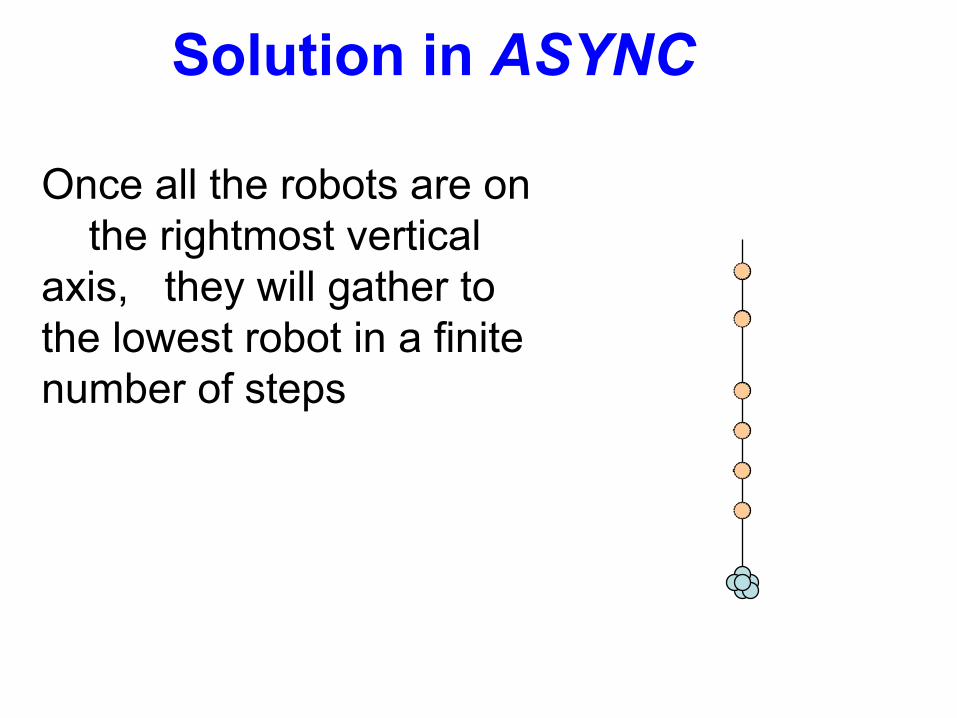
Once all the robots are on the rightmost vertical axis, they will gather to the lowest robot in a finite number of steps
Solution in ASYNC
Convergence via Center-of-Gravity
Algorithms
Convergence ViaCenter-of-Gravity Algorithms
[Cohen, Peleg, 04]
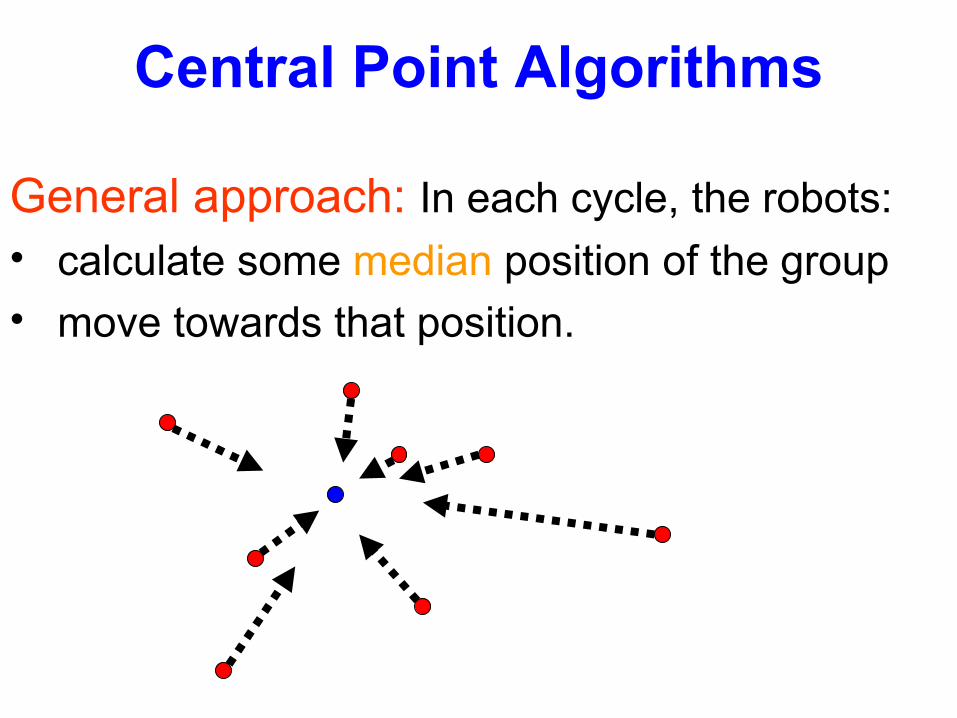
Central Point Algorithms
General approach: In each cycle, the robots:
• calculate some median position of the group • move towards that position.
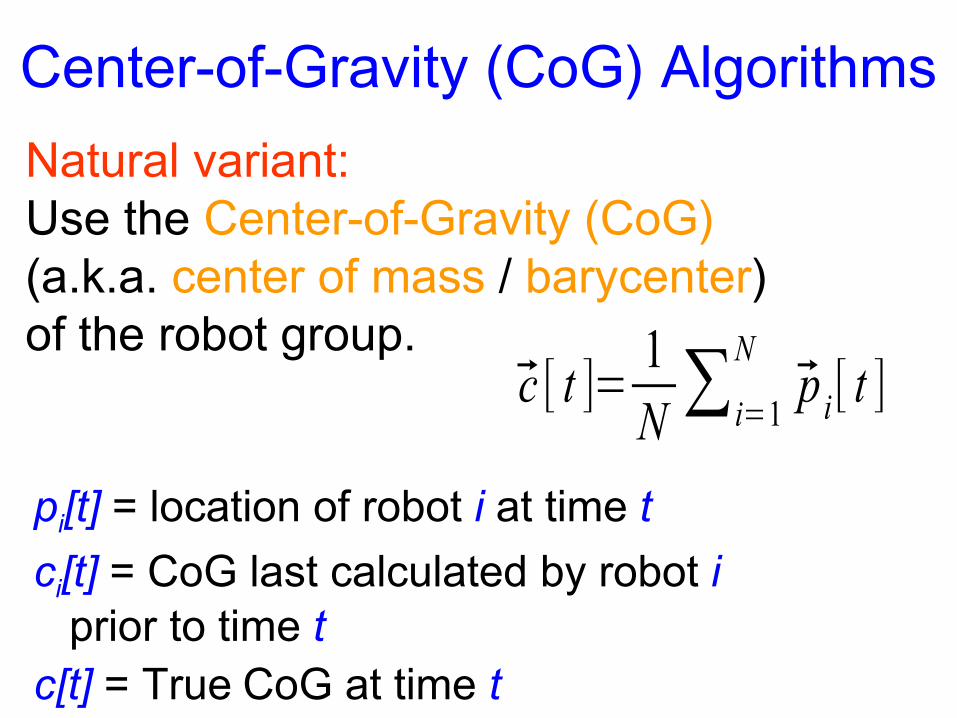
Center-of-Gravity (CoG) Algorithms
Natural variant:Use the Center-of-Gravity (CoG)(a.k.a. center of mass / barycenter)of the robot group.
c [ t ]=1N∑i=1
Np i[ t ]
pi[t] = location of robot i at time t
ci[t] = CoG last calculated by robot i prior to time t
c[t] = True CoG at time t
Analyzing CoG Algorithm
In fully synchronous (FSYNC) model:
easy to analyze, as discussed before
Analyzing CoG Algorithm (cont)
In semi-synchronous (SSYNC) and asynchronous (ASYNC) models:
more involved.
Effects of Asynchronous Timing
Correctness Result (in ASYNC)
Thm: CoG algorithm achieves convergence in the asynchronous model for any number of robots
Proof method: Define some convergence measure and show that it decreases to 0.
Monotonicity of Convex Hull
Assume: Robots reside on x-axis. (Handle each axis separately)
H[t] = convex hull of N robot locations and N calculated CoG’s
Lemma: H[t] cannot increase in time.
Quantities
ϕ1 [ t ]=∑i=1
N∣c [ t ]−c i [ t ]∣
ϕ2[ t ]=∑i=1
N∣p i [ t ]−c i [ t ]∣
ϕ[ t ]=ϕ1 [ t ]ϕ2[ t ]
h [ t ]=∣H [ t ]∣ψ [ t ]=
ϕ[ t ]2N
h [ t ]
Monotonicity of Progress Measures
Lemma 1: φ , h and ψ are non-increasing functions of time.
Main Lemma
For every time t0
there exists a time t’>t0 such that
ψ [ t ' ]≤1− 1
8N2 ψ [t0]
Convergence Rate
Assumption:
during any time interval [t,t+1], every robot completes at least one cycle.
(for complexity analysis only, not for correctness proof)
Asynchronous Model (ASYNC)
Lemma: In any execution of CoG algorithm, over any O(N2) time interval, the convex hull of robot locations + CoG’s is halved (in each dimension separately).
Lemma: There exist executions of the CoG algorithm in which cN time is required to halve the convex hull of N robots in each dimension.
Fully synchronous model (FSYNC)
Lemma: In any execution of the CoG algorithm, robots achieve gathering in O(h[0]) time.
Semi-Synchronous Model (SSYNC)
Lemma: In any execution of CoG algorithm, over any O(N) time interval, the convex hull of robots + CoGs is halved (in each dimension separately).
Overcoming Robot Imperfections
Aspects of Fault-Tolerance
Two separate aspects:
Overcoming robot imperfections Overcoming robot malfunctions
Robot ImperfectionsIn practice: Robot distance / angle measurements
suffer inaccuracies range estimation in sonar sensors:
about 1% Accuracy Angular separation: about 3o
Robot movements are imprecise due to unstable power supply, friction and force control
Calculations are bounded-precision
Problematics of Calculation Errors
Correctness of many robot algorithms relies on basic Euclidean geometry properties.
Unfortunately, these properties are invalid when measurement / calculation errors occur.
Overcoming Measurement Errors
[Cohen, Peleg, 06]
Model: • Robot location estimation and movements
are imprecise• Imprecision bounded by accuracy parameter ε known at robot design stage.
• Measurement imprecisions affect distance / angle estimations
ε-precision
D = real distance to observed pointd = measured distance
Robot's distance estimation is ε-precise if (1- ε) d < D < (1+ ε) d
Similar definition for angle estimations
Impossibility Results
Thm: (1) Gathering is impossible (for any N>1) assuming inaccuracies in both distance and angle measurements, even
• in FSYNC model • when robots have unlimited memory• when robots are allowed to use randomness
Impossibility Results – Cont.
(2) Gathering is impossible for N=2 assuming inaccuracies only in distance measurements
(3) Deterministic convergence is impossible if angle measurement imprecision is large, even
• in FSYNC model • when robots have unlimited memory
Algorithmic Results
Thm: The gravitational algorithm:
• converges in FSYNC model for small (ε<0.5) distance / angle measurement imprecision
but
• fails to converge in ASYNC model for any distance measurement imprecision
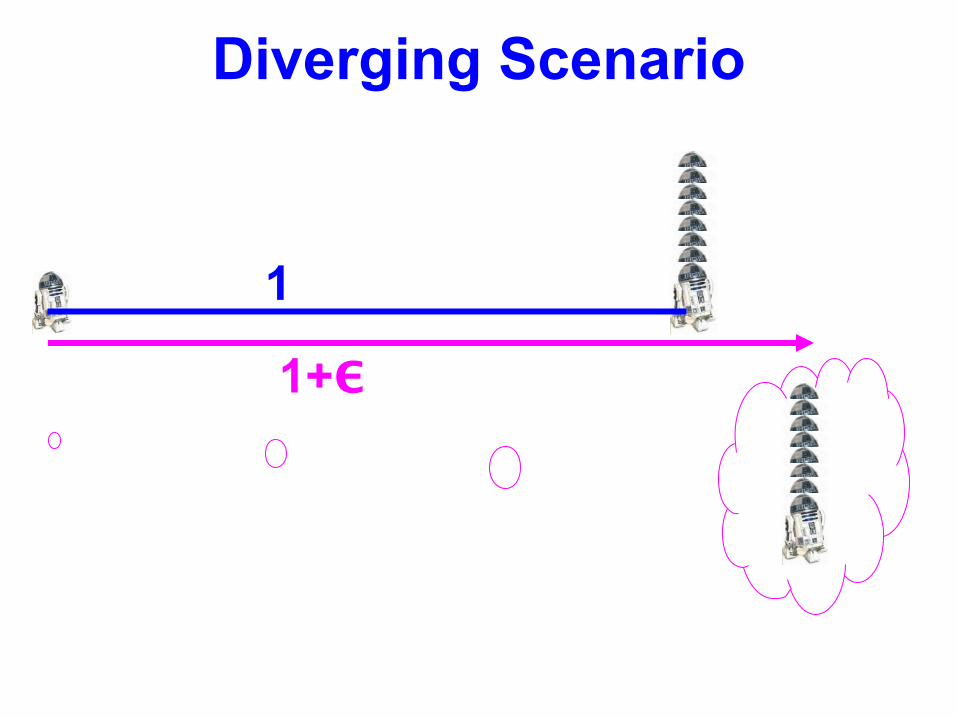
Diverging Scenario
1
1+ε
Algorithmic Results (cont.)
Thm: Deterministic convergence in SSYNC model assuming small ( ε < 0.2 or so) distance and angle measurement imprecision
(by a “guarded” gravitational algorithm)
For robot i :
• Observe configuration
• Calculate vcogi , vector to measured center of
gravity• Let ρi = estimate for max possible error
between vcogi and actual CoG
• If |vcogi| ≤ ρi then stay in place
• else (|vcogi > ρi|) move to ci=(1- ρi/|vcog
i|) vcogi
Algorithm
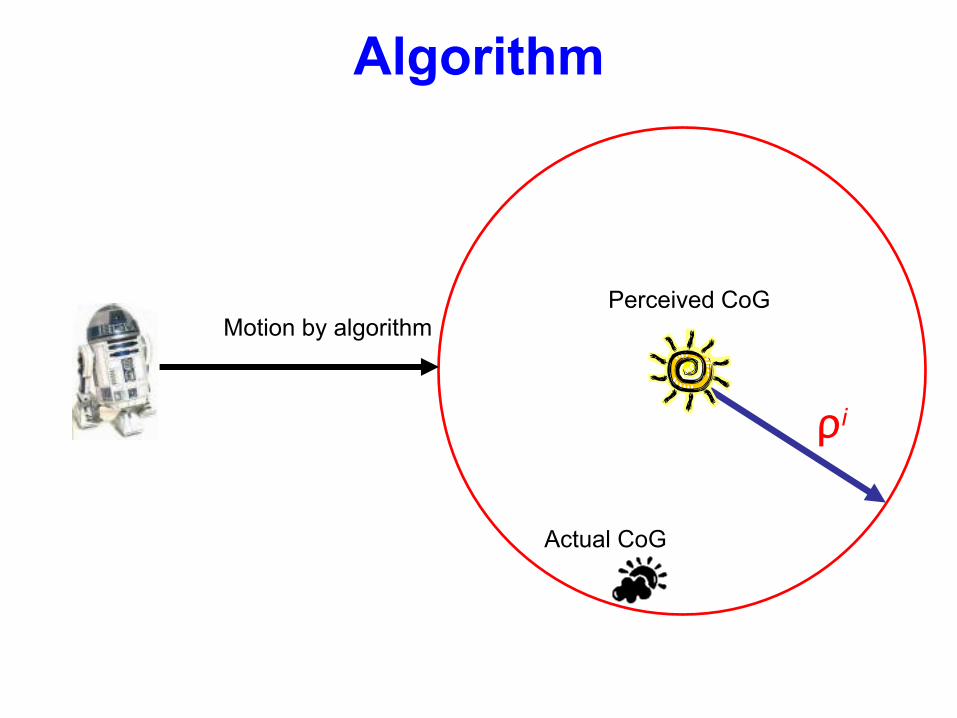
Algorithm
Perceived CoG
Actual CoG
Motion by algorithm
ρi
Fault Tolerance
Fault Tolerance
Essential requirement for swarms: Fault-tolerant algorithms, which will succeed in performing their tasks despite the failure of some of the robots
Failure Models
Crash fault model: robots may suddenly stop functioning
Byzantine fault model: Robots may malfunction and disobey their protocol in arbitrary ways
Fault-Tolerant Recruiting[Yoshida, Masuzawa, Fujiwara, 97]
• Introduced fault tolerance in robot swarms• Dealt only with initial crash failures:
all crashes occurred before the start of the run
crashed robots do not recover• Assumed non-oblivious robots
(with unlimited memory)
Fault-Tolerant Recruiting
Task solved: ARSP Assuming at most k robots have crashed, the nonfaulty robots must form a team A of size |A|≥N-k.
Each non-faulty robot must know if it belongs to the team or not.
Fault-Tolerant Recruiting
Intuition: • A crashed robot will never move.• A non-faulty robot moves infinitely often.• So by watching other robots and noting which of them moved, one can identify the non-faulty ones.
Exercise 1:Devise a solution in the FSYNC model.
Solution:• make a “small” move• observe movements (position changes)
Fault-Tolerant Recruiting
• A = {robots that moved} (the rest crashed)
Q: Why “small” moves?A: To allow identification
of “matching”
Fault-Tolerant Recruiting
Exercise 2:Devise a solution in the SSYNC model.Difficulty:Some nonfaulty robots might not move due to being inactive in this round.Solution:Repeat process, gradually increasing A, until it is of size |A|≥N-k.Difficulty:Preventing additional (late) joiners?
Fault-Tolerant RecruitingThe main result [Yoshida, Masuzawa, Fujiwara, 97]:
In the asynchronous model
(complicated by the fact that robots operate without any coordination whatsoever)
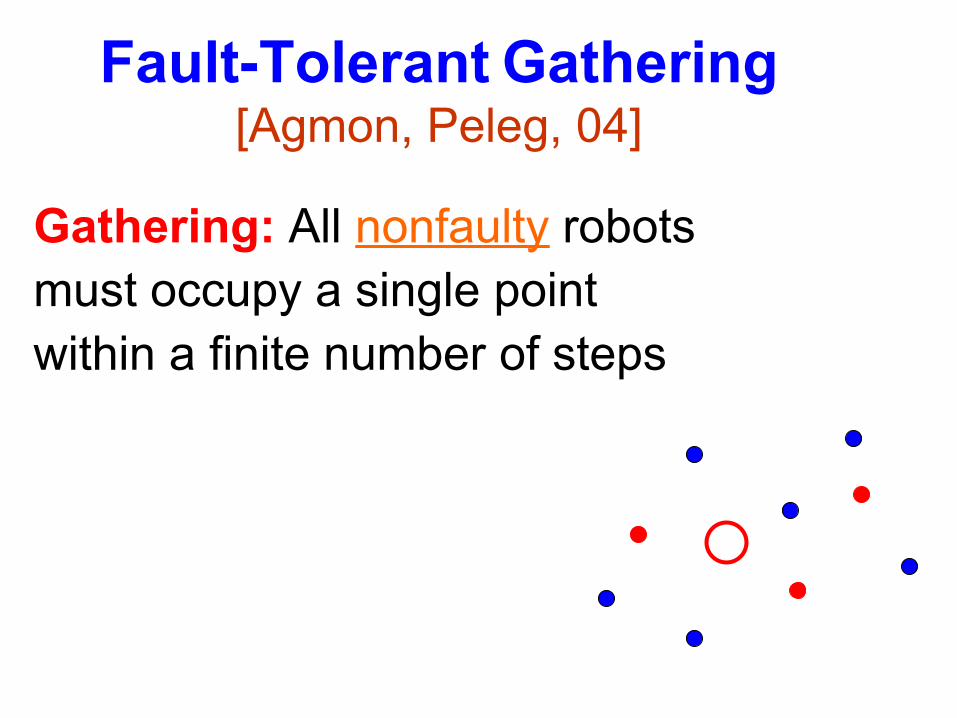
Gathering: All nonfaulty robots must occupy a single point within a finite number of steps
Fault-Tolerant Gathering[Agmon, Peleg, 04]
The Adversary
For nonfaulty robot: Determines if active in the cycle
(“fairness”) Determines the distance it will move
in the cycle
For faulty robot: Determines the course of action in
the cycle (crash / Byzantine)
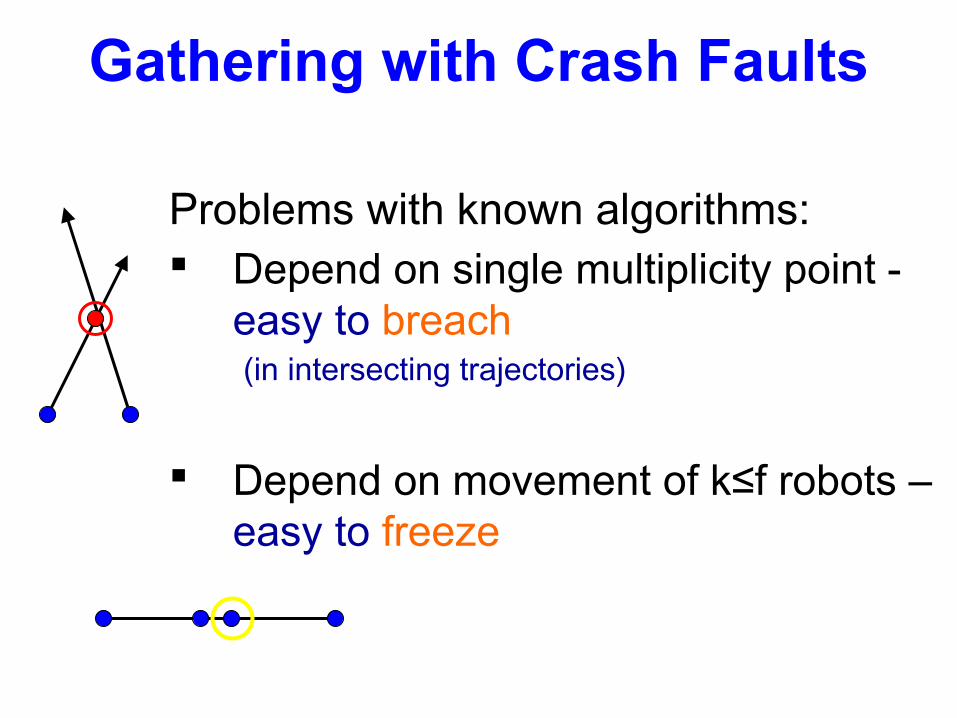
Gathering with Crash Faults
Problems with known algorithms: Depend on single multiplicity point -
easy to breach (in intersecting trajectories)
Depend on movement of k≤f robots – easy to freeze
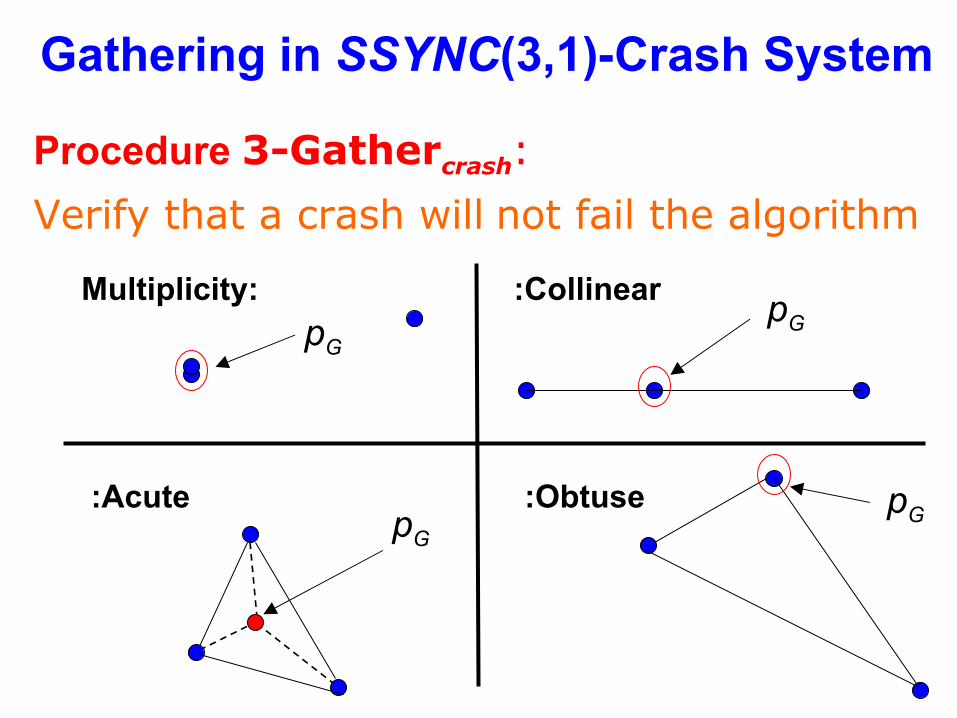
Gathering in SSYNC(3,1)-Crash System
Procedure 3-Gathercrash:
Verify that a crash will not fail the algorithm
:AcutepG
:Obtuse pG
:CollinearpG
Multiplicity:
pG
Generalizations
More complex algorithm for N robots Algorithm for Byzantine faults
(assuming fewer than N/3 failures)

Gathering in SSYNC(N,1)-Crash System
Use same algorithm described before for SSYNC without failures
Idea: Robot trajectories never intersect, so robots never create a multiplicity point
Must verify that a crash will not fail the algorithm
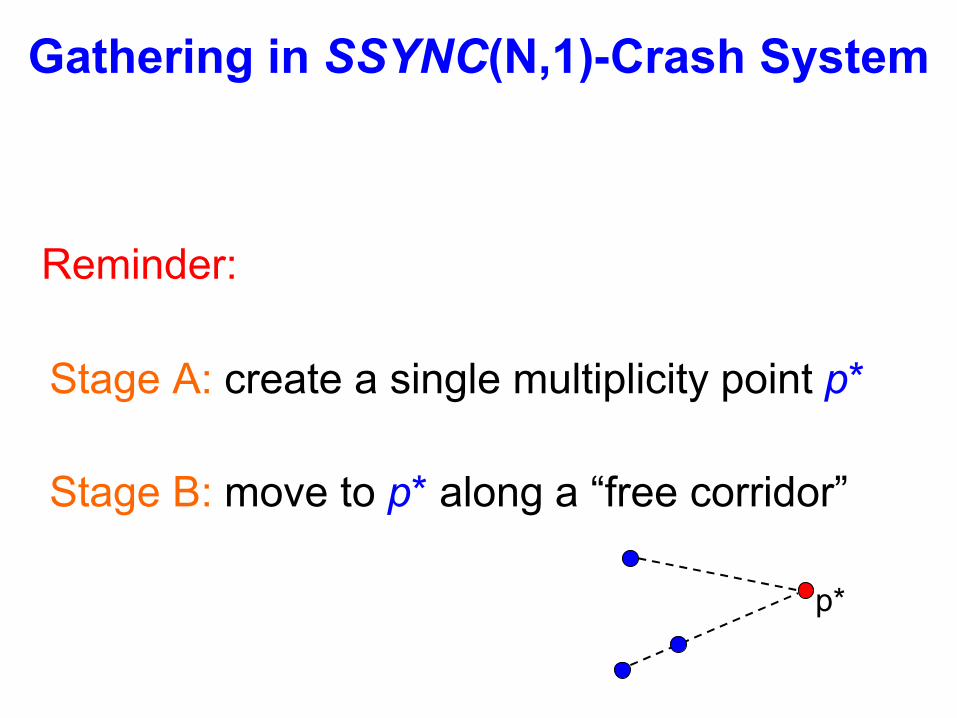
Gathering in SSYNC(N,1)-Crash System
Reminder:
p*
Stage A: create a single multiplicity point p*
Stage B: move to p* along a “free corridor”
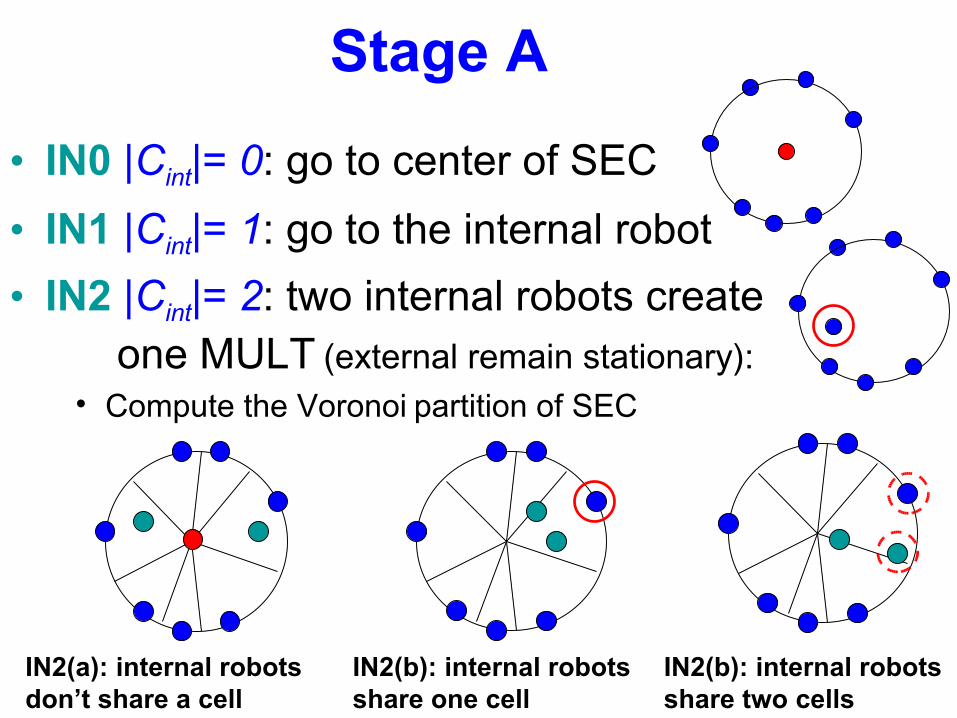
• IN0 |Cint|= 0: go to center of SEC
• IN1 |Cint|= 1: go to the internal robot
• IN2 |Cint|= 2: two internal robots create one MULT (external remain stationary):
• Compute the Voronoi partition of SEC
Stage A
IN2(a): internal robots don’t share a cell
IN2(b): internal robots share one cell
IN2(b): internal robots share two cells
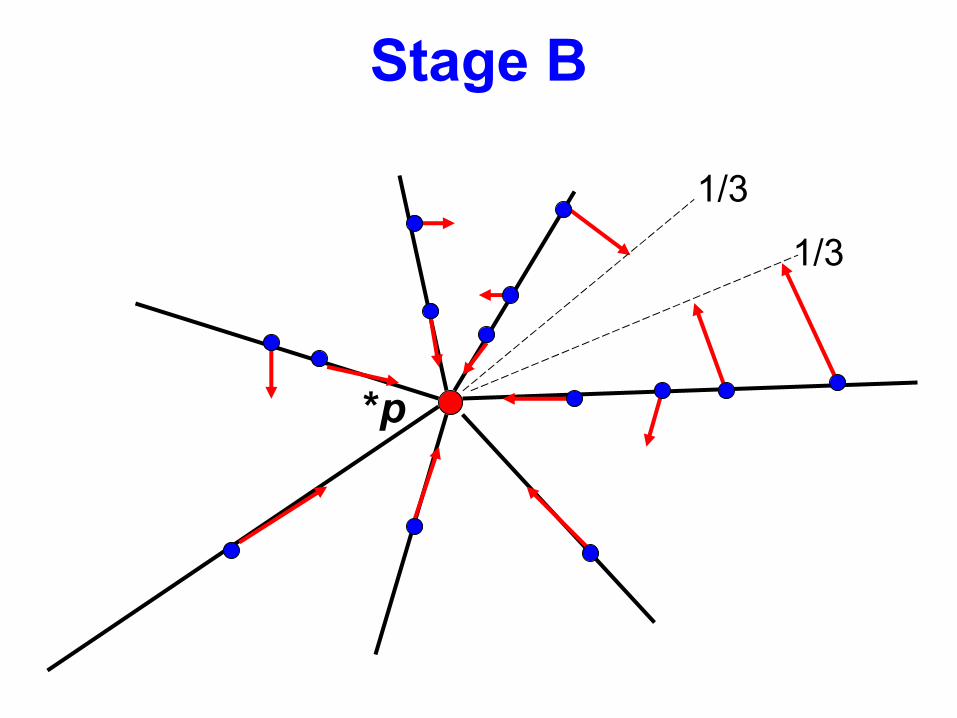
Stage B
*p
1/3
1/3
Gathering in SSYNC(N,1)-Crash System
Thm: Gathering is possible
in SSYNC model in (N,1)-Crash system
Gathering with Byzantine Faults
Thm: Impossible to gather
in SSYNC / ASYNC model
in (3,1)-Byz system
We focus on fully synchronous (FSYNC) model
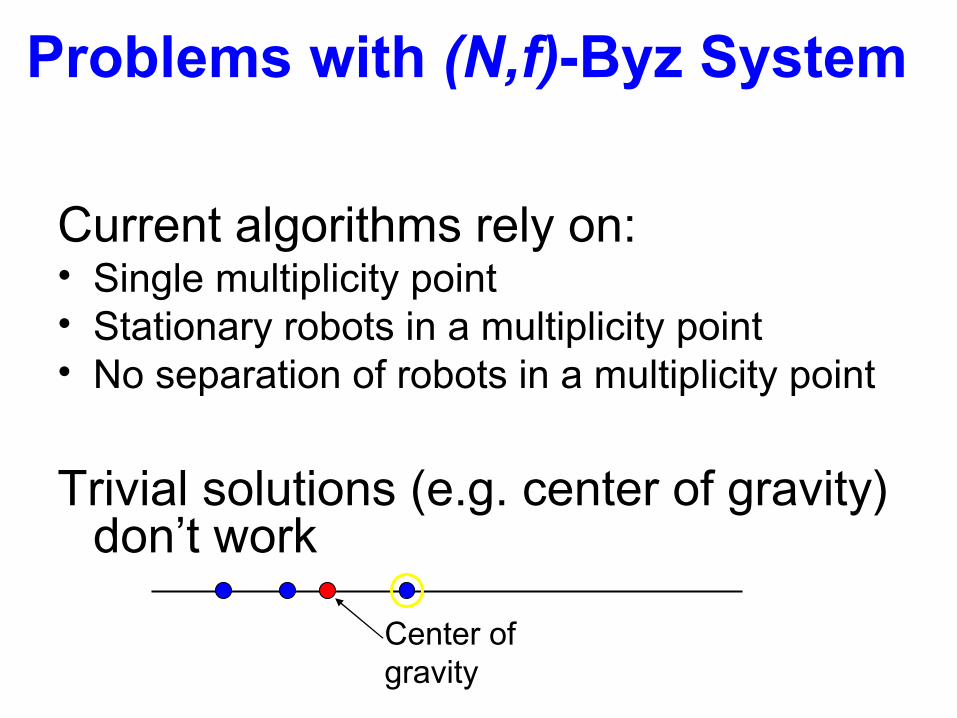
Problems with (N,f)-Byz System
Current algorithms rely on:• Single multiplicity point• Stationary robots in a multiplicity point• No separation of robots in a multiplicity point
Trivial solutions (e.g. center of gravity) don’t work
Center of gravity
Gathering in FSYNC(3,1)-Byz System
Procedure 3_Gather_Byz• If collinear: Go to mid robot.• Else: Go to intersection point of
angle bisectors.
Lemma: Nonfaulty robots decrease the distance between them in each cycle by at least c·Smin, for c>0
Achieves Gathering
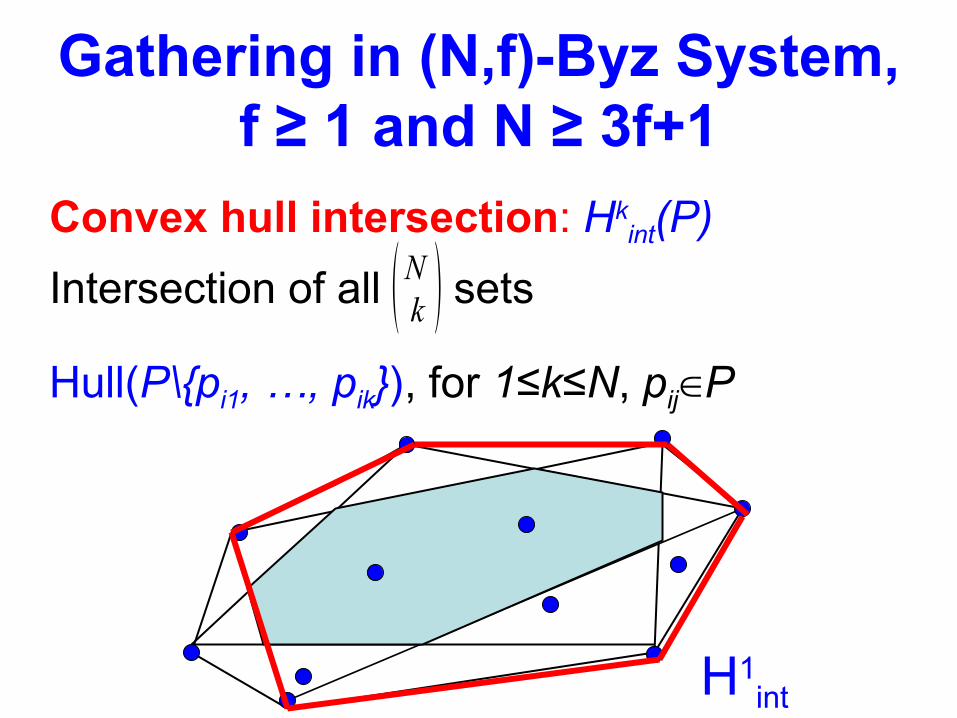
Gathering in (N,f)-Byz System,f ≥ 1 and N ≥ 3f+1
Convex hull intersection: Hkint(P)
Intersection of all sets
Hull(P\{pi1, …, pik}), for 1≤k≤N, pijP
H1int
Nk
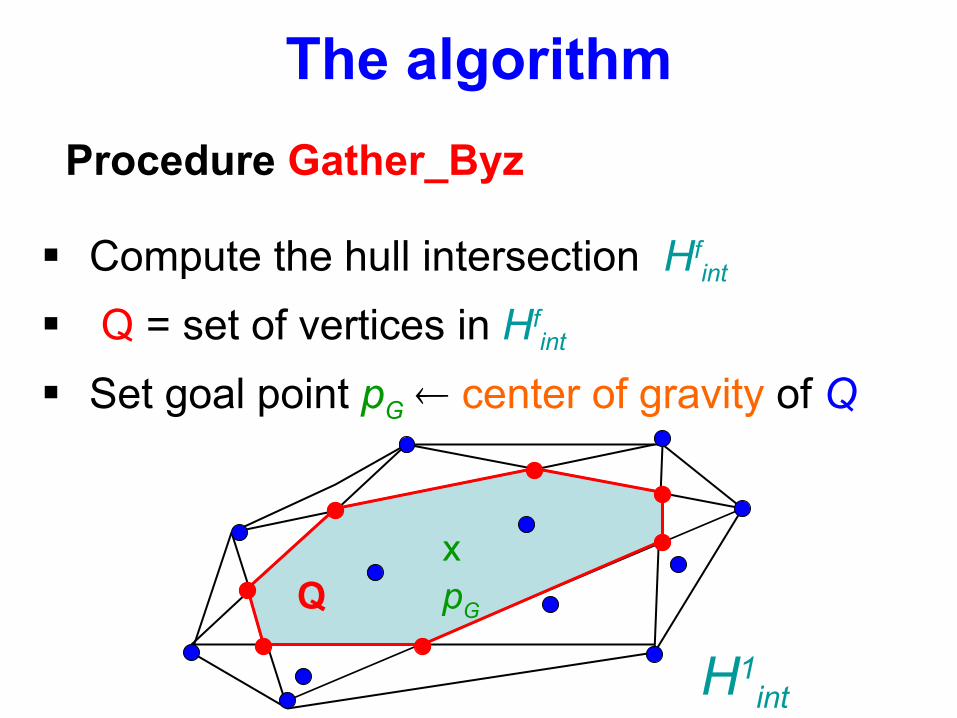
The algorithm
Compute the hull intersection Hfint
Q = set of vertices in Hfint
Set goal point pG center of gravity of Q
Procedure Gather_Byz
H1int
xpGQ
Justification
For finite family A of convex sets in ℝ2, |A|≥3 :
If every three sets of A have a common point
then there is a point common to all sets of A
Helly’s theorem for d=2:
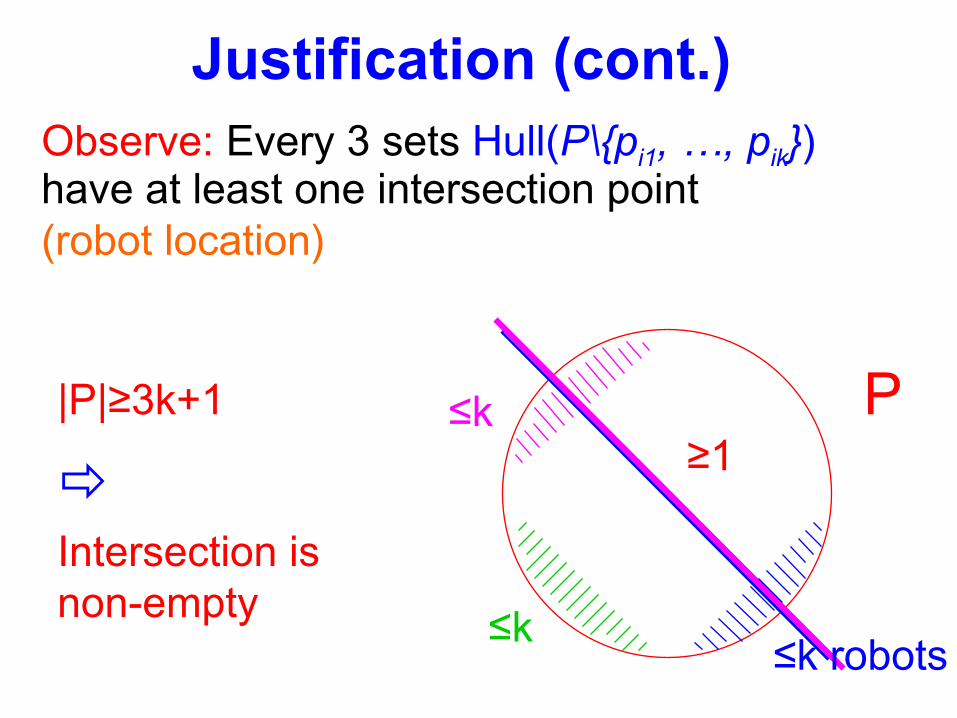
Justification (cont.)Observe: Every 3 sets Hull(P\{pi1, …, pik}) have at least one intersection point (robot location)
P
≤k robots≤k
≤k|P|≥3k+1
Intersection is non-empty
≥1
Justification (cont.)
Cor:
The sets Hull(P\{pi1, …, pik}) have at least one common intersection point (by Helly’s theorem)
The set Q is nonempty
Justification (cont.)
The center of gravity is well-defined
pG is well-defined Let NF = set of non-faulty robots NF is one of the sets participating
in the intersection Hfint
pG is inside Hfint
pG is inside Hull(NF)
Justification (cont.)
The diameter of NF decreases by at least c·Smin in each cycle
The nonfaulty robots (NF) move towards a point inside Hull(NF)
The diameter of NF becomes 0 within finite time, thus all non-faulty robots gather
Gathering in FSYNC (N,f)-Byz System
Thm: Gathering is possible in FSYNC model in (N,f)-Byz systemwhen N ≥ 3f+1
Fault-tolerance of Gravitational Convergence
Transient failures: robots will converge by CoG algorithm following any number of transient errors
(due to obliviousness)
Fault-tolerance (cont.)
Crash failures:
If M < N-1 robots crash during execution, then remaining N-M robots will converge to center of gravity of crashed robots.
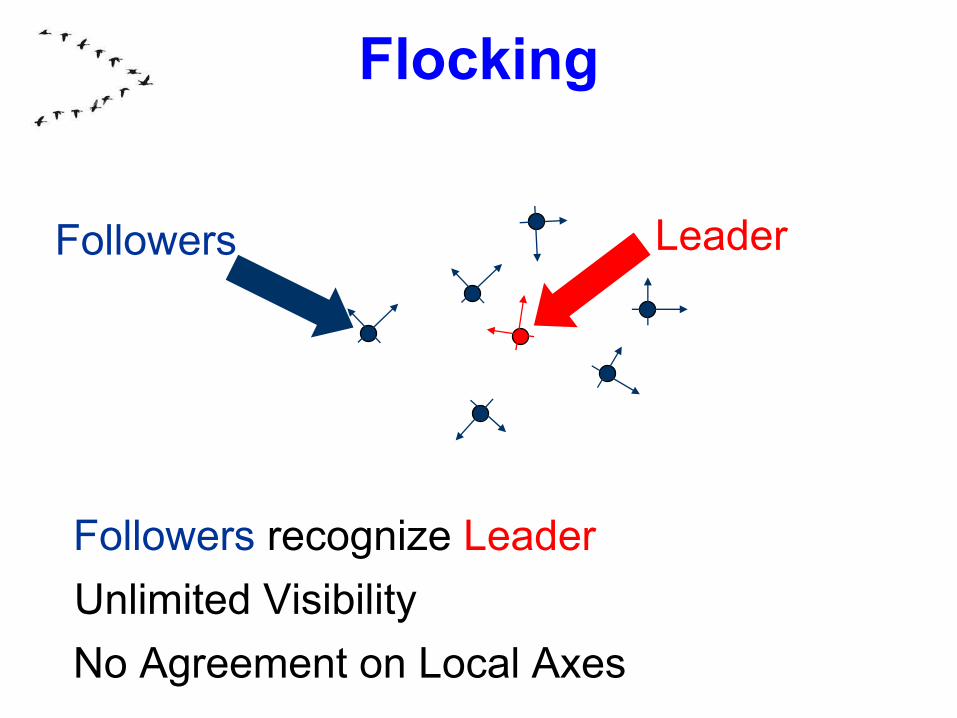
Flocking
Flocking
Flocking
LeaderFollowers
Followers recognize Leader
No Agreement on Local Axes
Unlimited Visibility
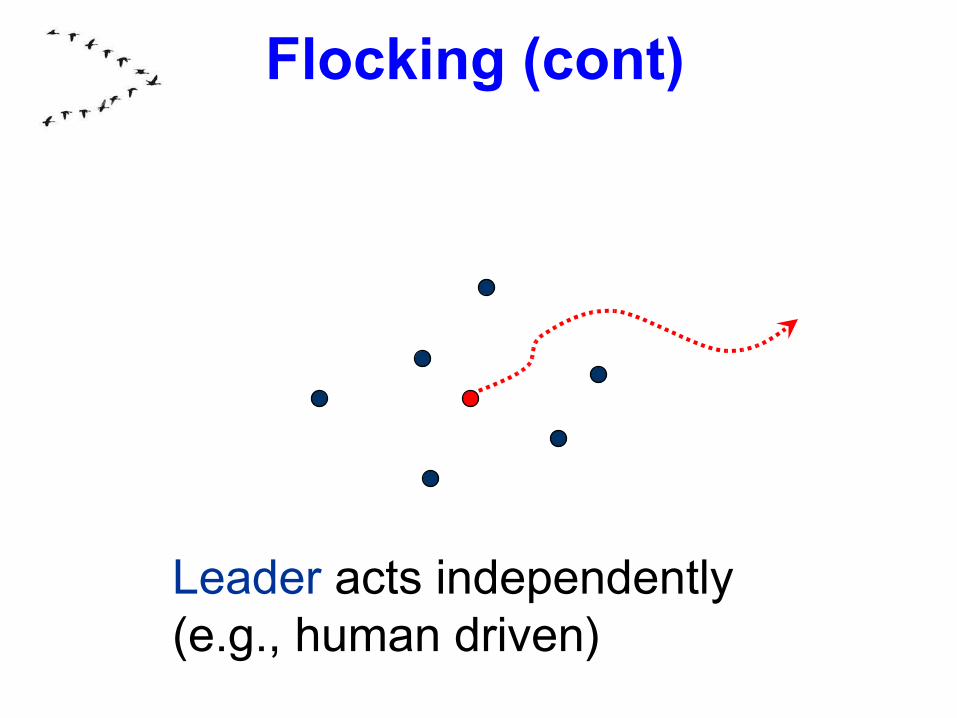
Leader acts independently (e.g., human driven)
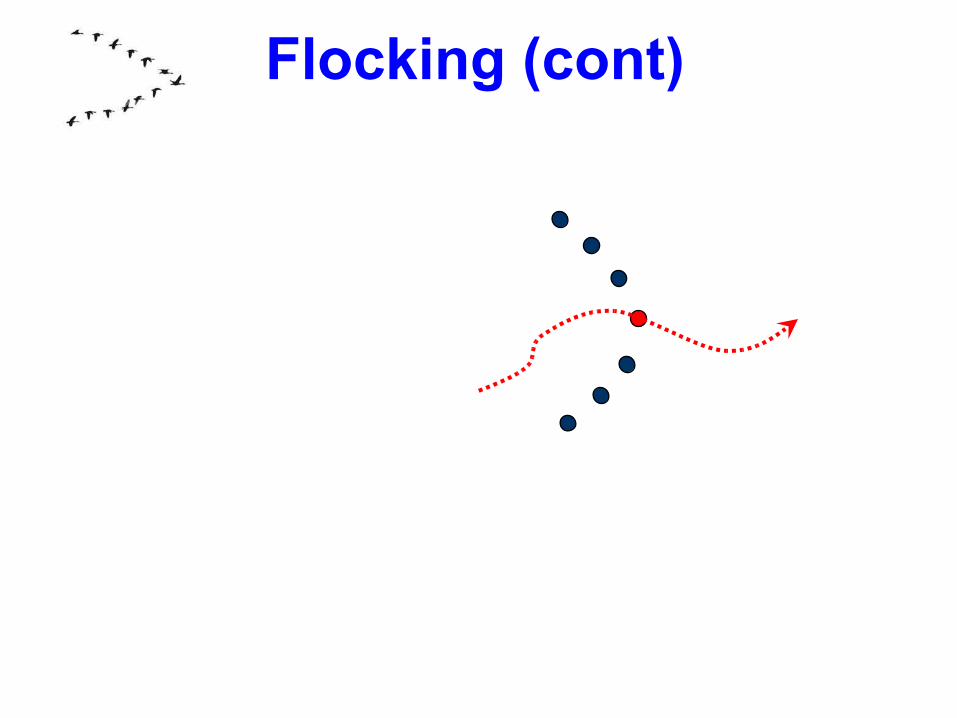
Flocking (cont)
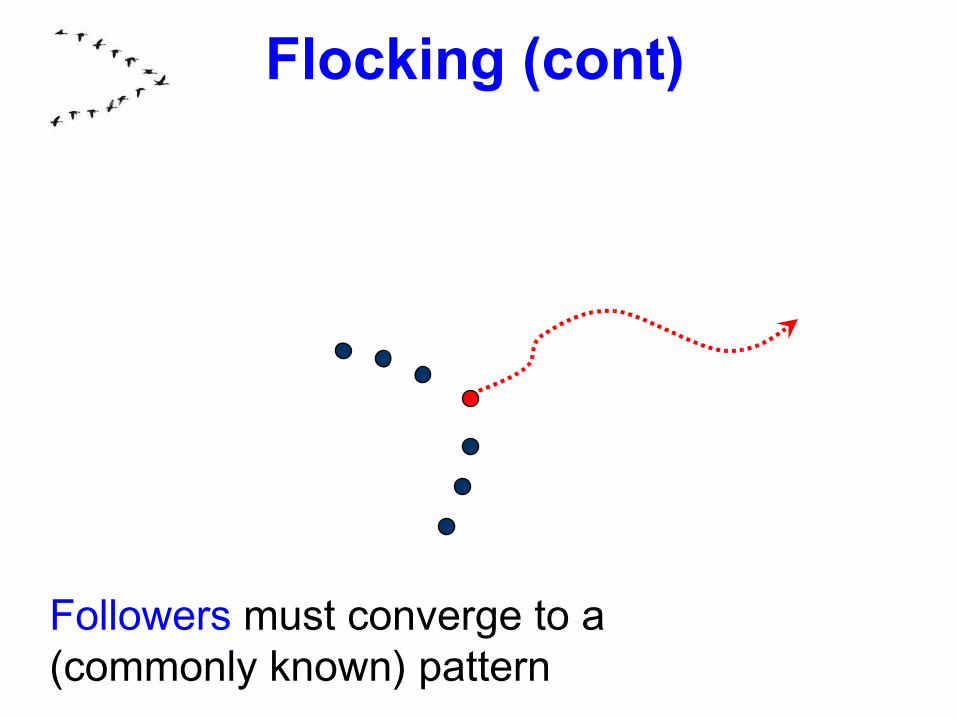
Flocking (cont)
Followers must converge to a (commonly known) pattern
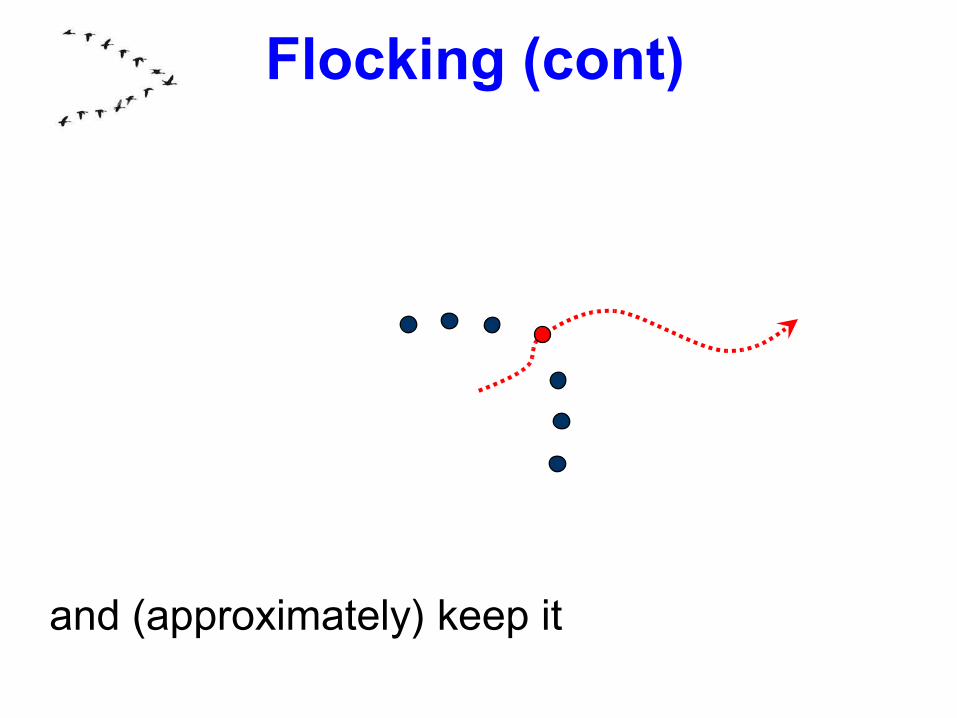
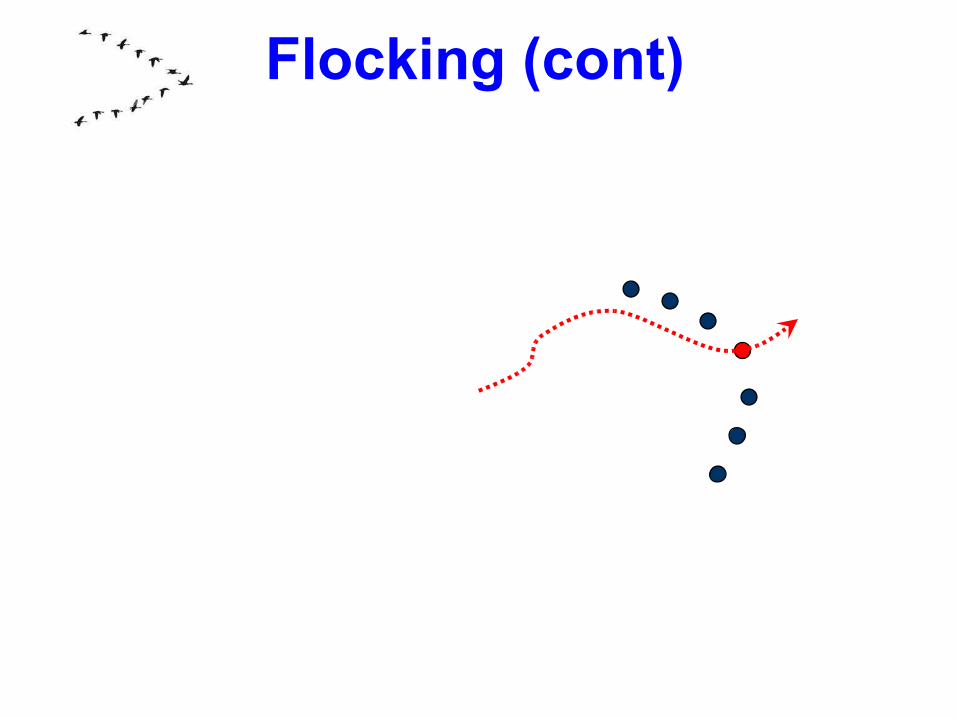
Flocking (cont)
and (approximately) keep it
Flocking (cont)
Flocking (cont)
Assumptions
Followers: • do not know the path in advance• have no way to observe direction of
movement• have no common velocity
• Time spent on Look and Compute steps is negligible w.r.t. time spent on Move
History
• [Wang, 91]– Followers have observable identities– Fixed assignment to slots
• [Chen, Luh, 94]– Fixed geometric patterns (matrix)– Followers know the path in advance
• [Balch, Arkin, 98]– Followers know the path in advance
12
3
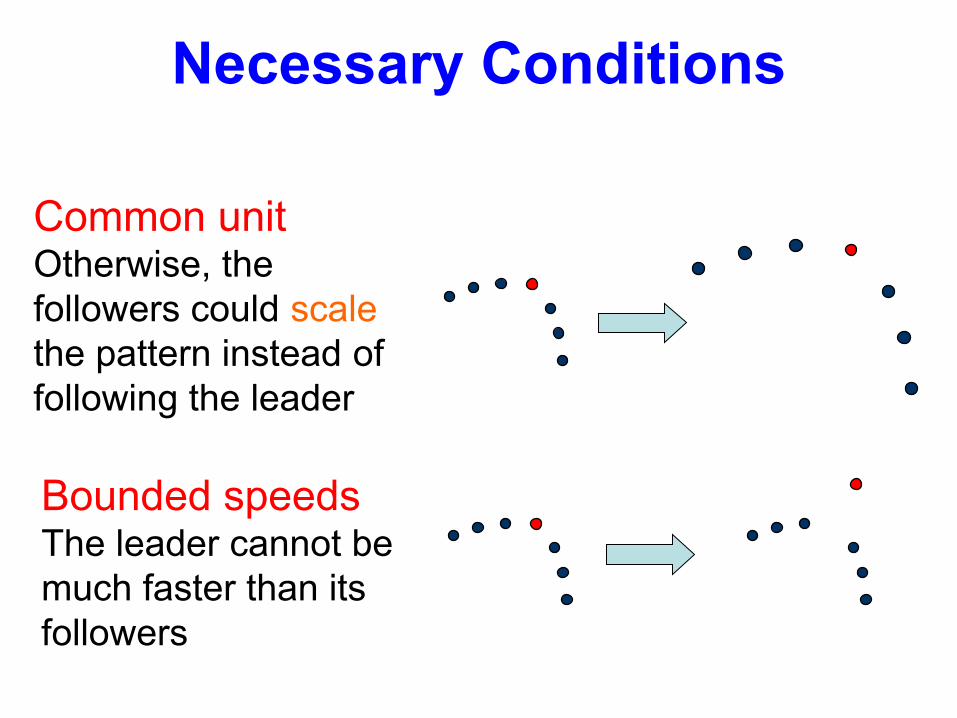
Necessary Conditions
Common unitOtherwise, the followers could scale the pattern instead of following the leader
Bounded speedsThe leader cannot be much faster than its followers
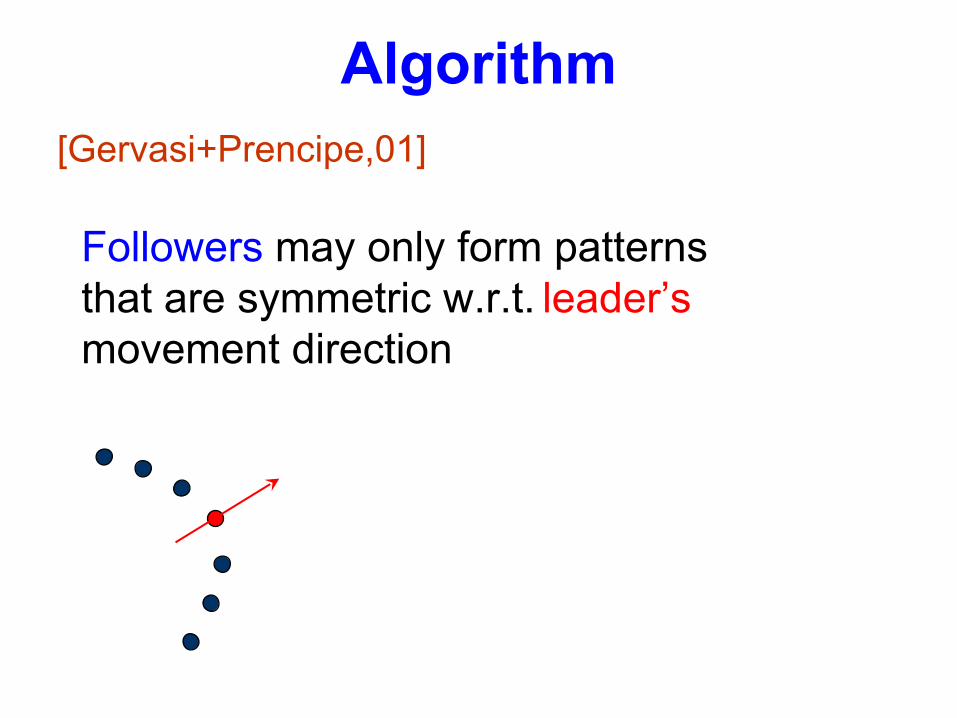
Followers may only form patterns that are symmetric w.r.t. leader’s movement direction
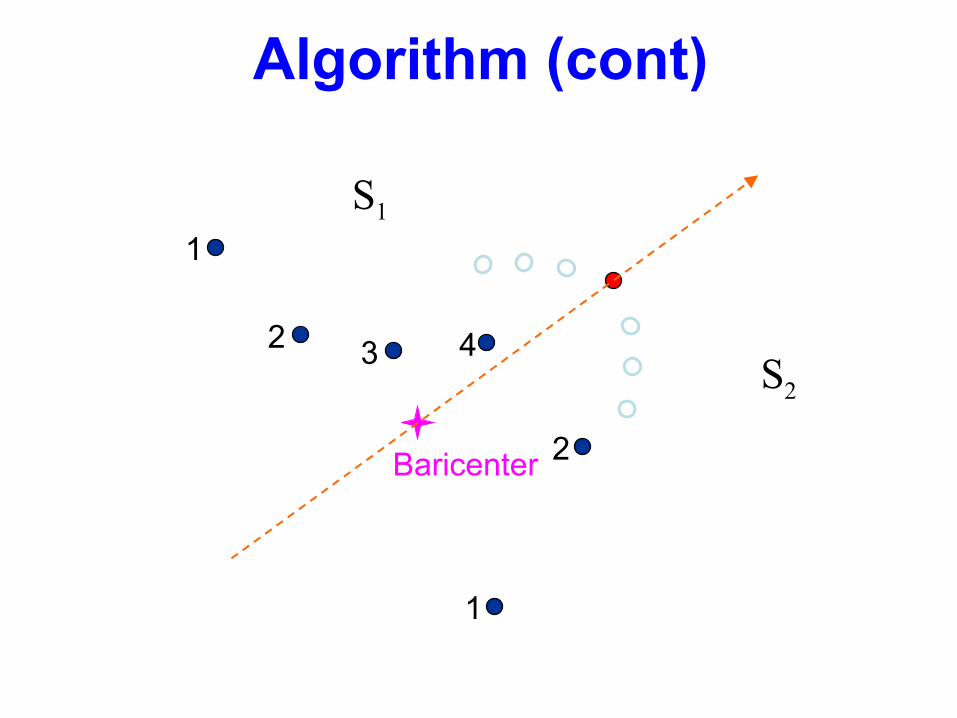
Algorithm[Gervasi+Prencipe,01]
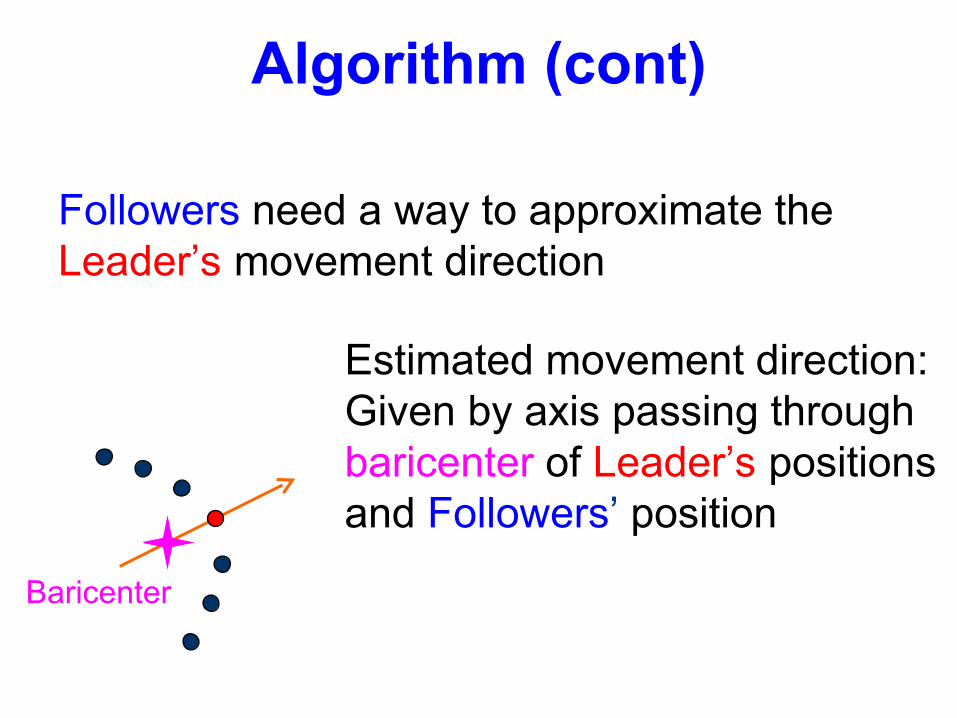
Followers need a way to approximate the Leader’s movement direction
Estimated movement direction:Given by axis passing through baricenter of Leader’s positions and Followers’ position
Baricenter
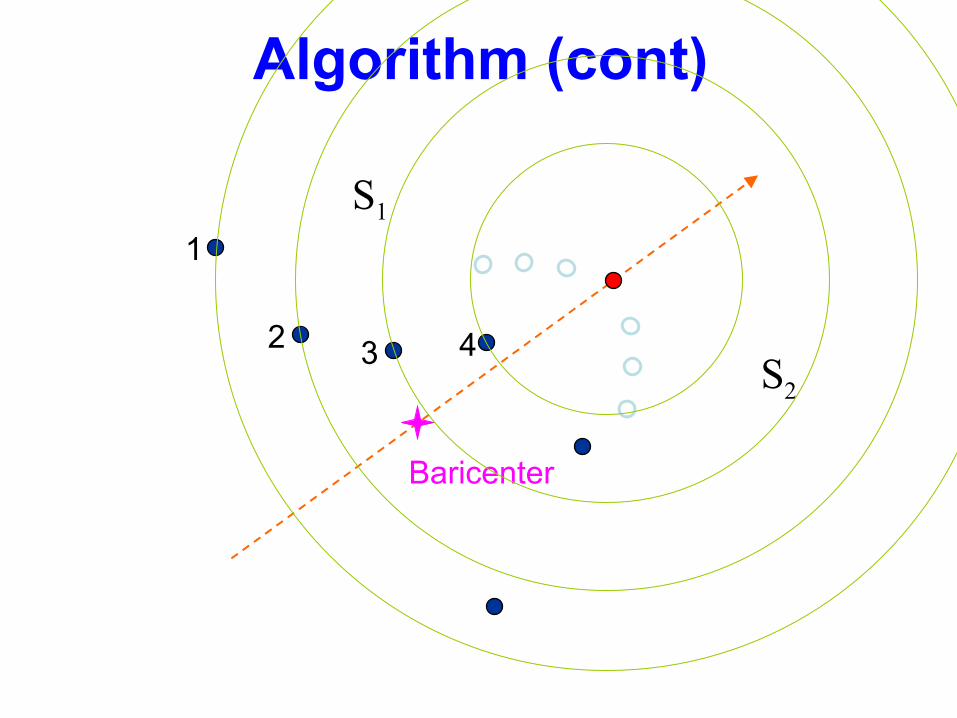
Algorithm (cont)
Algorithm (cont)
S1
S2
Baricenter
1
2 3 4
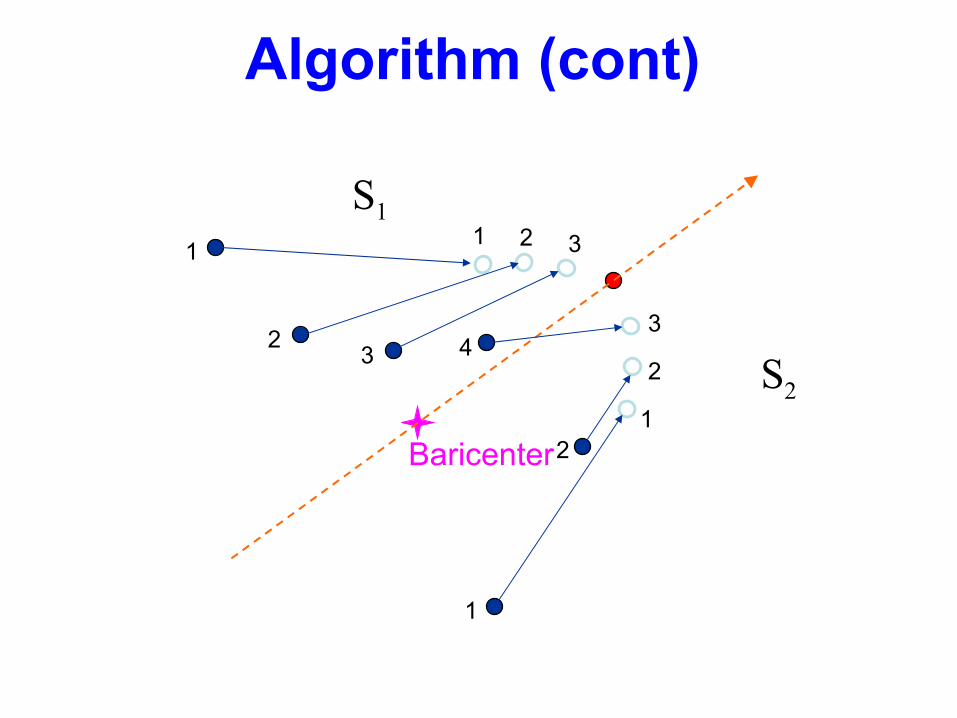
Algorithm (cont)
S1
S2
Baricenter
1
2 3 4
1
2
Algorithm (cont)
S1
S2
Baricenter
1
23 4
1
2
1 2 3
1
2
3
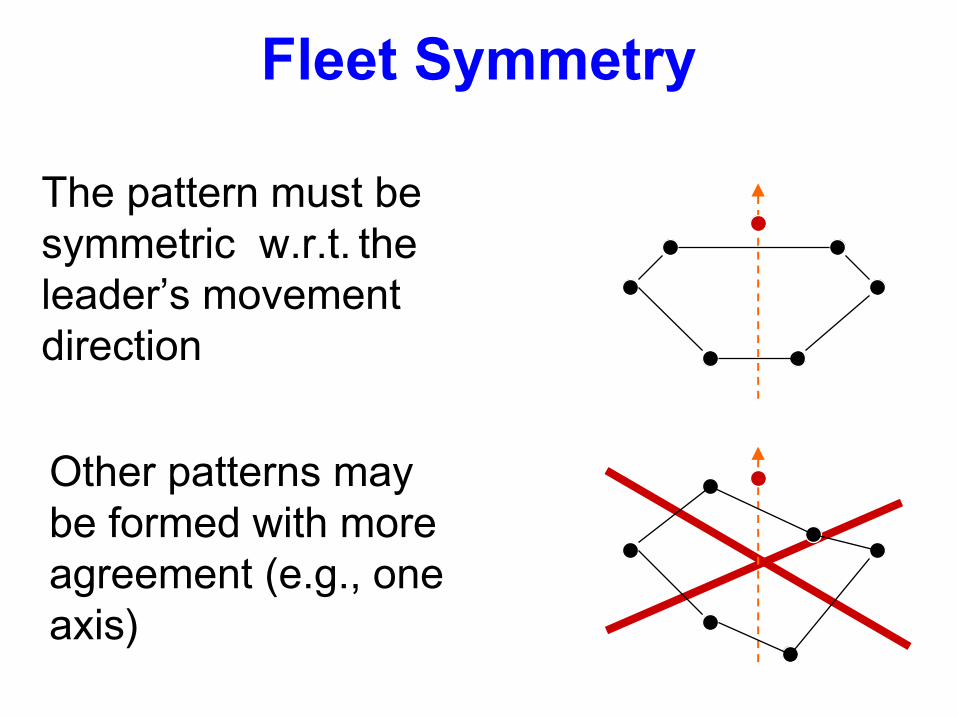
Fleet Symmetry
The pattern must be symmetric w.r.t. the leader’s movement direction
Other patterns may be formed with more agreement (e.g., one axis)
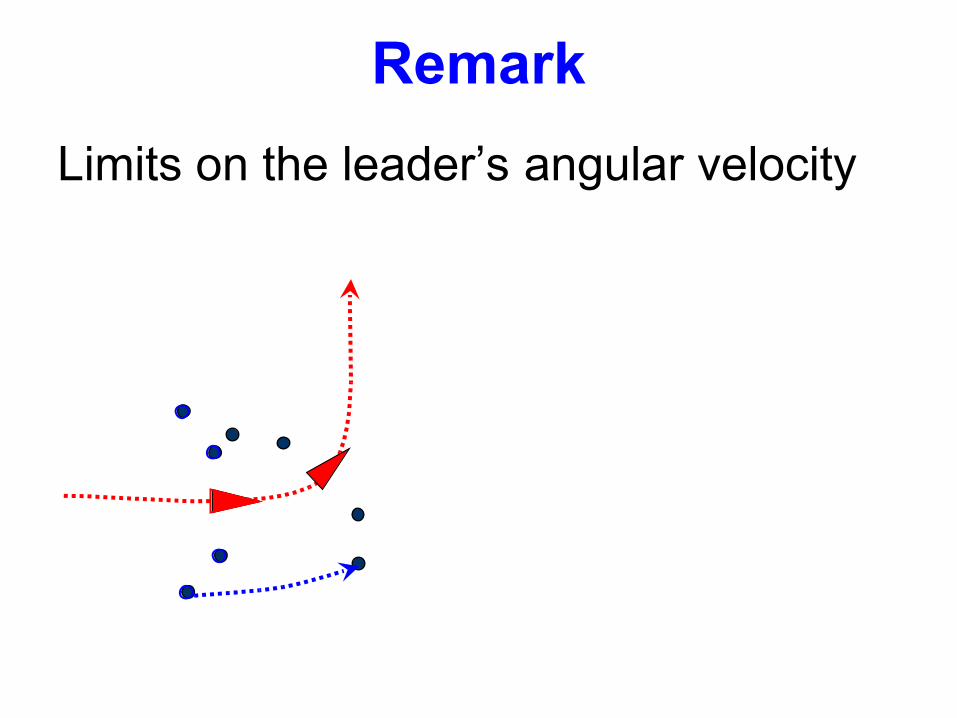
Remark
Limits on the leader’s angular velocity
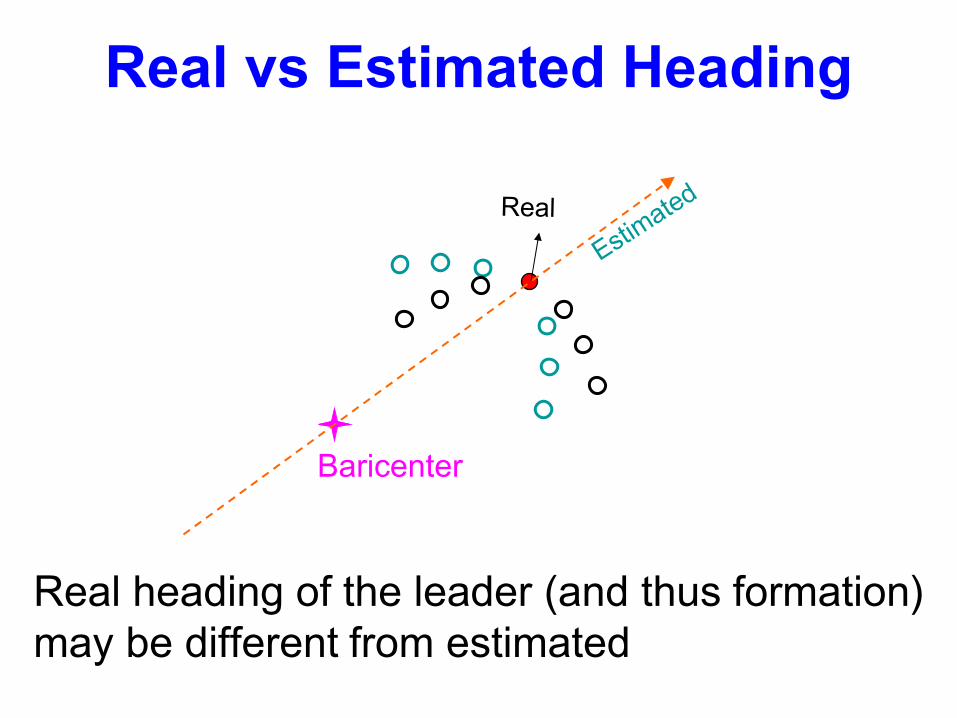
Real vs Estimated Heading
Baricenter
Real
Estimated
Real heading of the leader (and thus formation) may be different from estimated
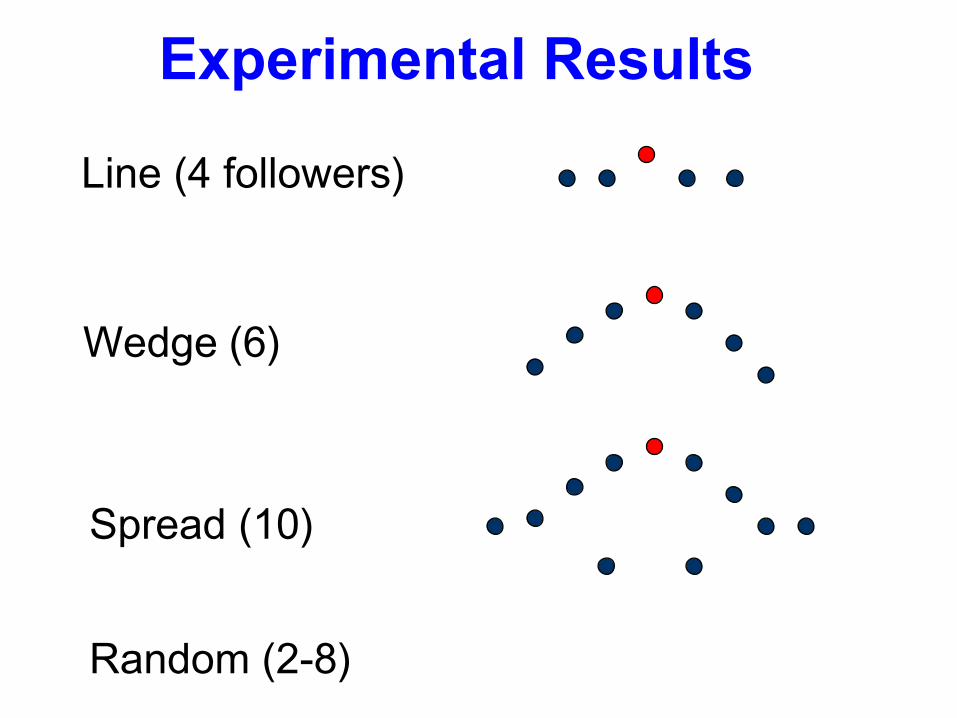
Line (4 followers)
Wedge (6)
Spread (10)
Experimental Results
Random (2-8)
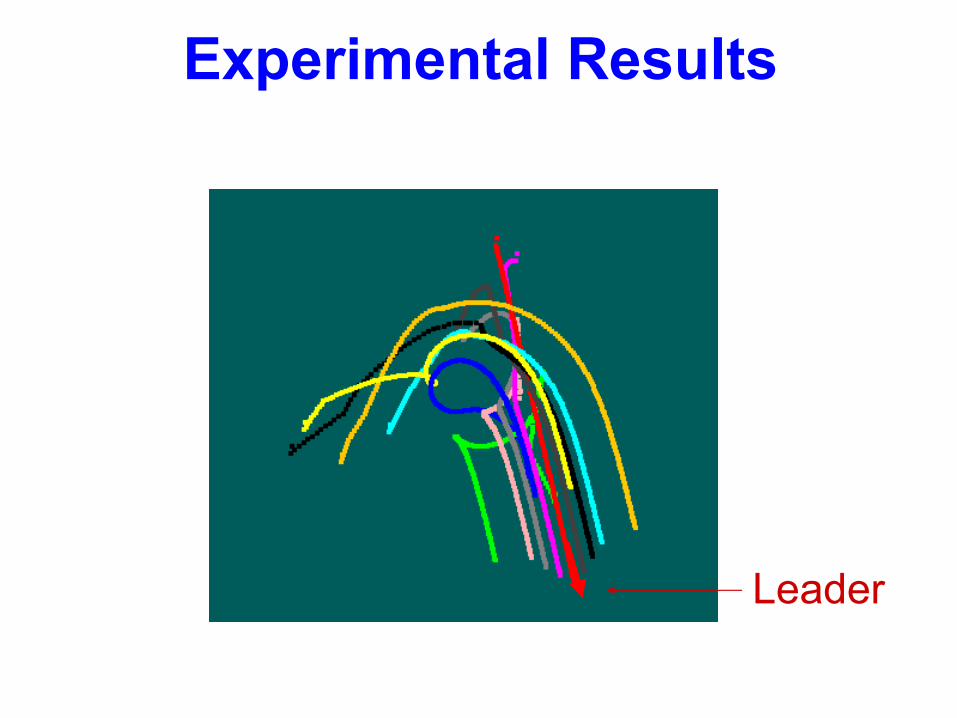
Experimental Results
Leader

V-flock Project[Albocher, Bruckstein, Gordon, Leibovitz, 04]
V-flock Project
Considerations for V formation
• Aerodynamic considerations (reducing air resistance)
• Visibility considerations (increasing field of view)
V-flock Project
Hardware
• Rotating light sensor (indicates amount of light sensed)
• Odometer - measures rotation cycles• Engines• Mini light-bulb system• Programmable Lego Mindstorm RCX unit
("brain" system)

V-flock Project
V-flock Project
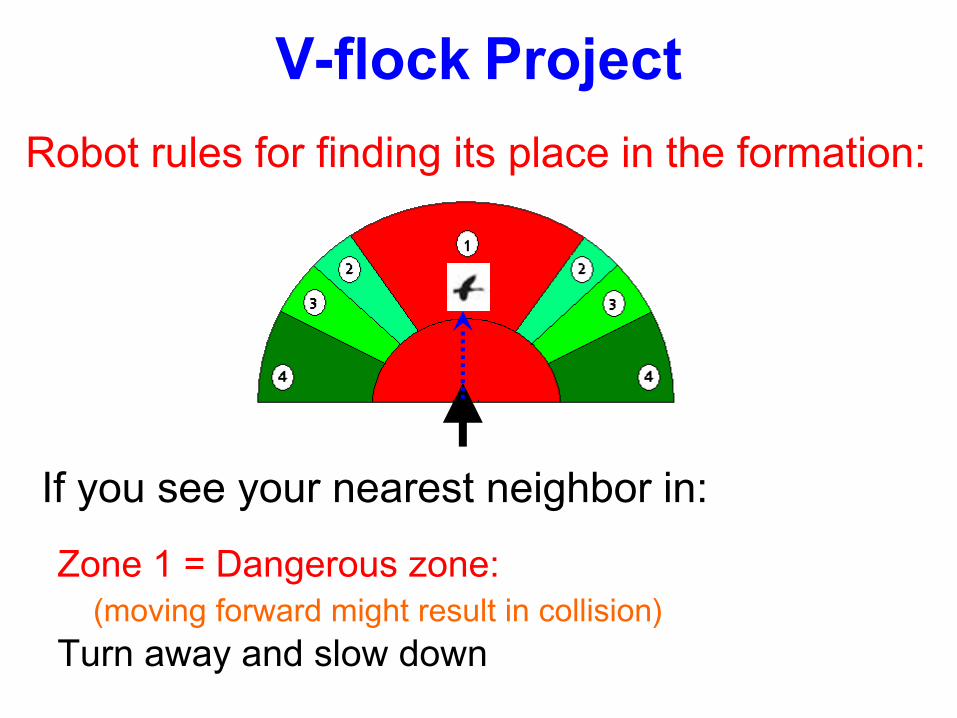
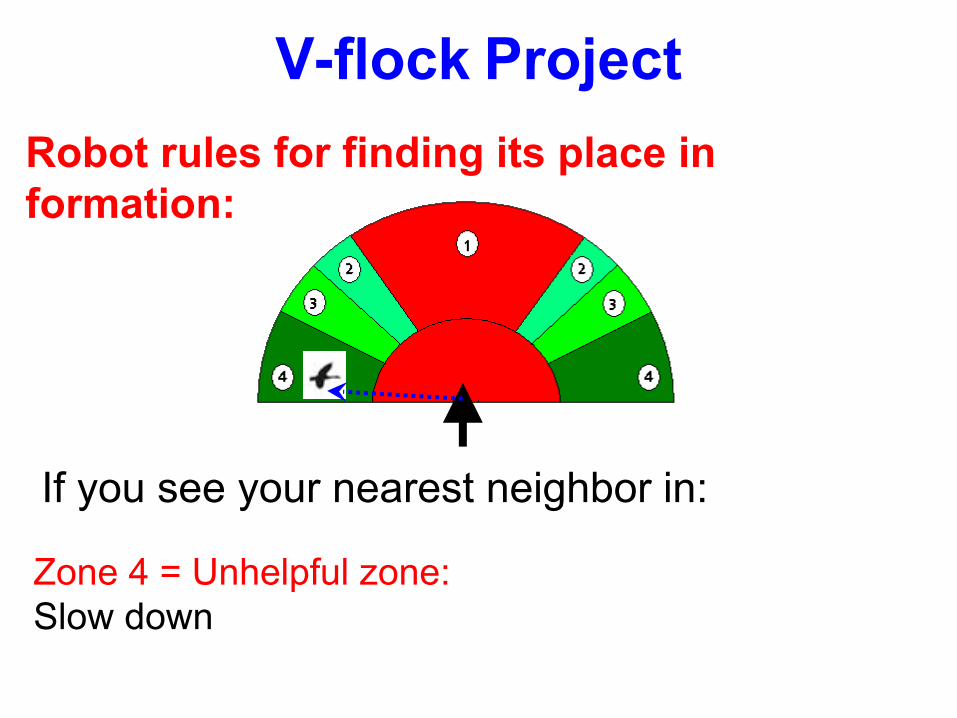
Robot rules for finding its place in the formation:
Zone 1 = Dangerous zone: (moving forward might result in collision)
Turn away and slow down
If you see your nearest neighbor in:
V-flock Project
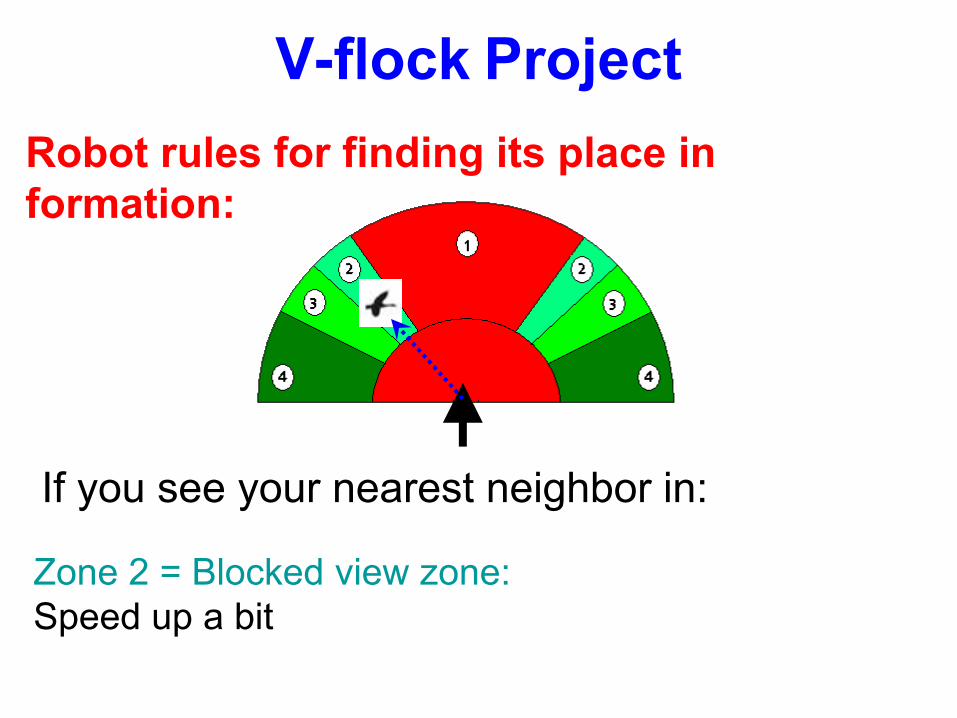
Robot rules for finding its place in formation:
Zone 2 = Blocked view zone: Speed up a bit
If you see your nearest neighbor in:
V-flock Project
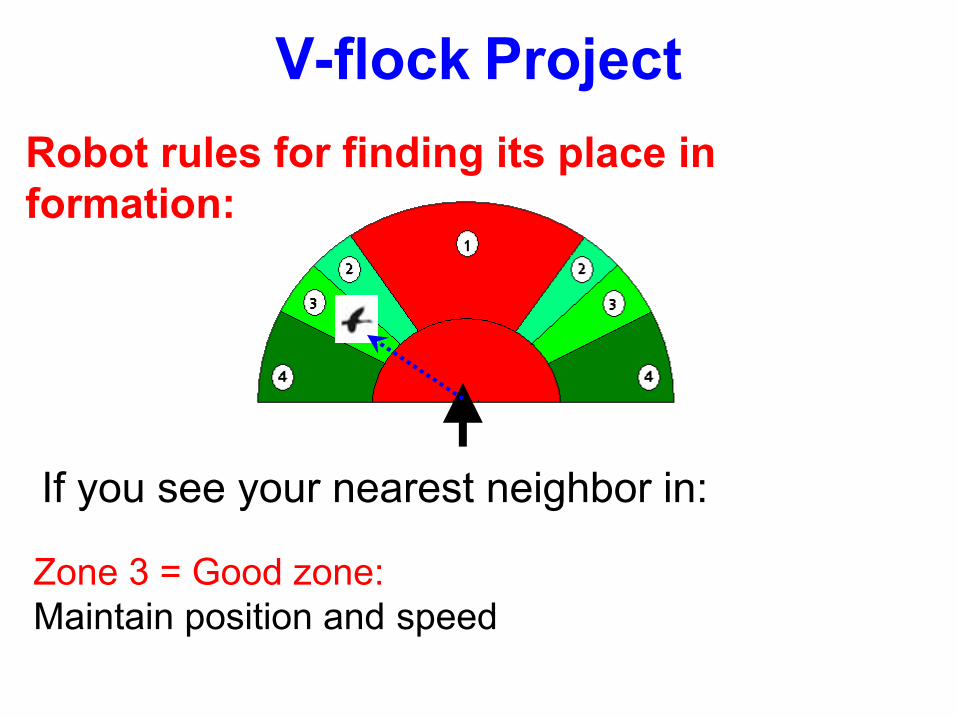
Robot rules for finding its place in formation:
Zone 3 = Good zone: Maintain position and speed
If you see your nearest neighbor in:
V-flock Project
Robot rules for finding its place in formation:
Zone 4 = Unhelpful zone: Slow down
If you see your nearest neighbor in:
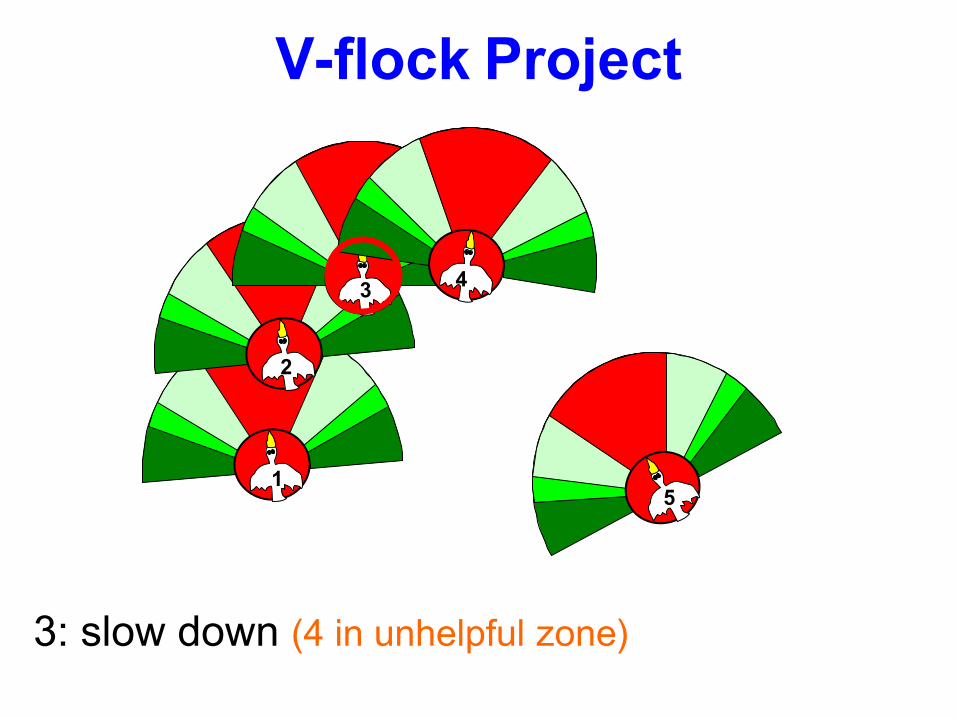
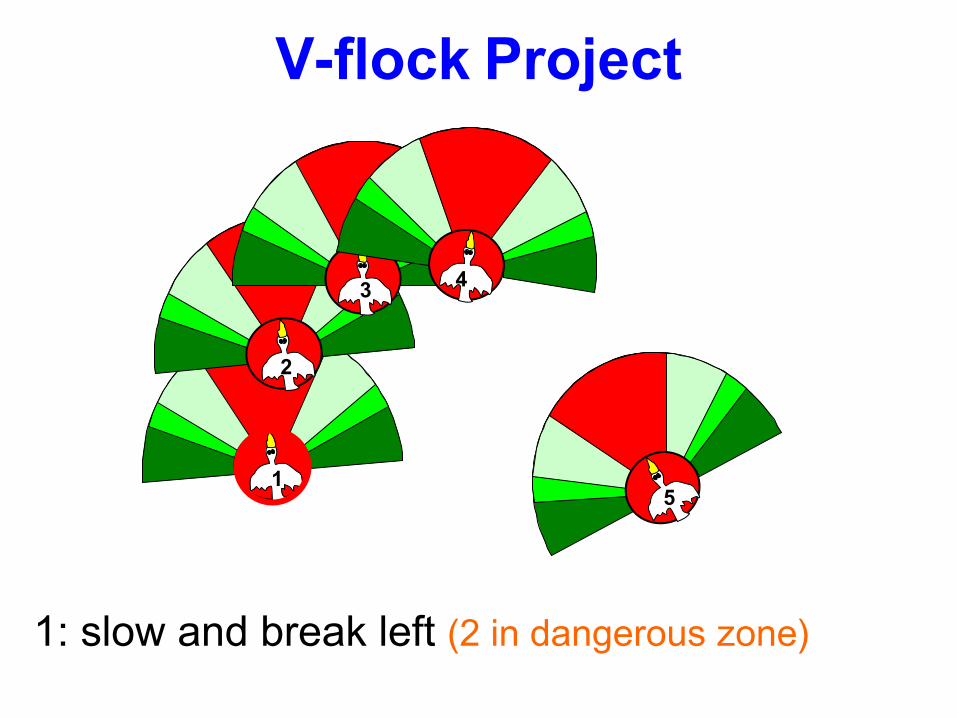
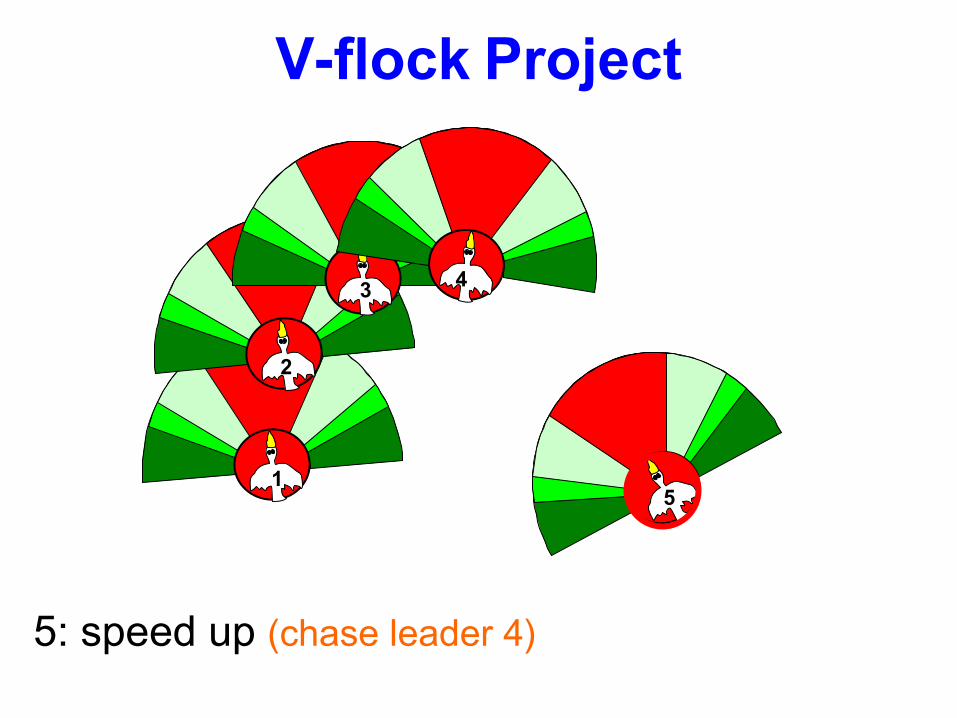
V-flock Project
2
1
3 4
5
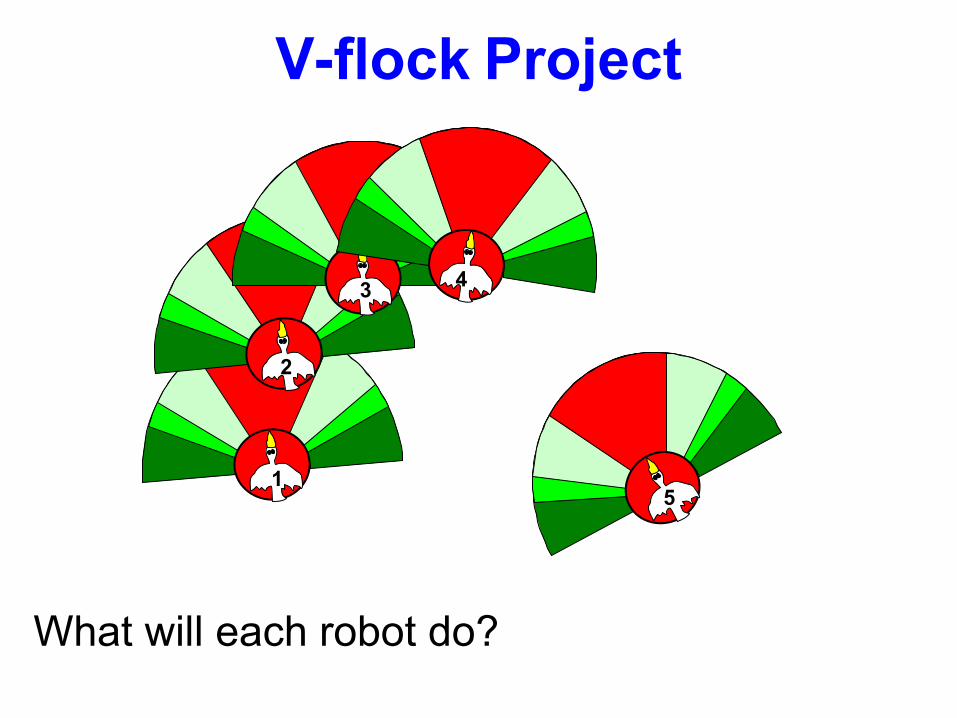
What will each robot do?
V-flock Project
2
1
3 4
5
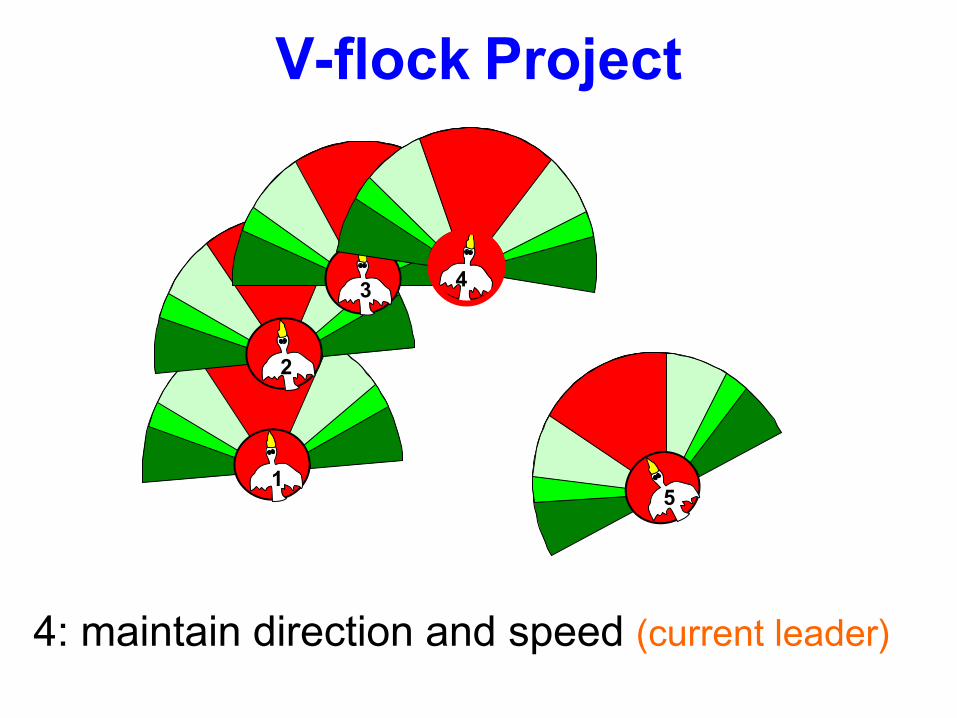
4: maintain direction and speed (current leader)
V-flock Project
2
1
3 4
5
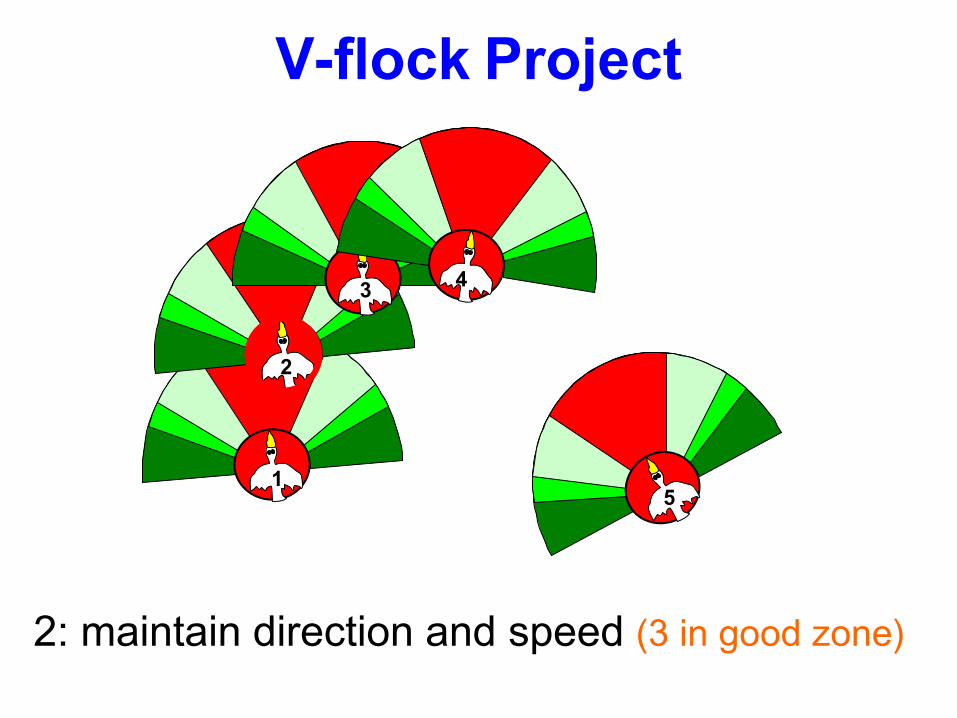
2: maintain direction and speed (3 in good zone)
V-flock Project
2
1
3 4
5
3: slow down (4 in unhelpful zone)
V-flock Project
2
1
3 4
5
1: slow and break left (2 in dangerous zone)
V-flock Project
2
1
3 4
5
5: speed up (chase leader 4)
V-flock Project
Failing case 1: Other robots out of site
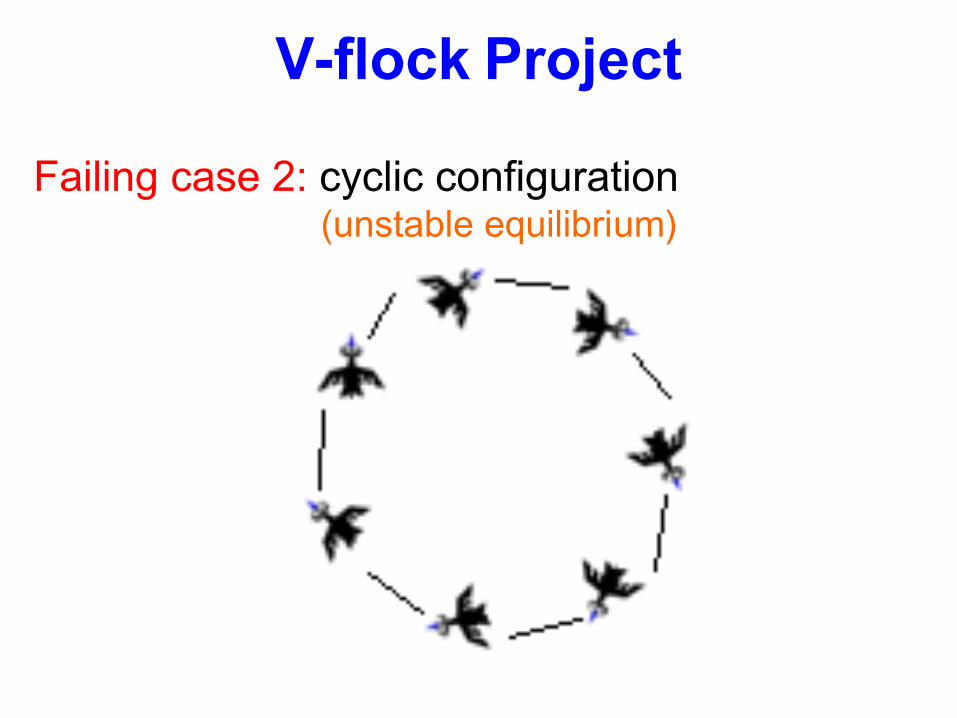
V-flock Project
Failing case 2: cyclic configuration(unstable equilibrium)
Ant Robotics
Ant Robotics
Biological Inspiration
• Inspired by foraging behavior of ants• Ants find shortest paths from nest to food
source• Ants deposit pheromones along traveled path,
which is used by other ants to follow the trail• This kind of indirect communication via the
local environment is called stigmergy• Provides adaptability, robustness and
redundancy
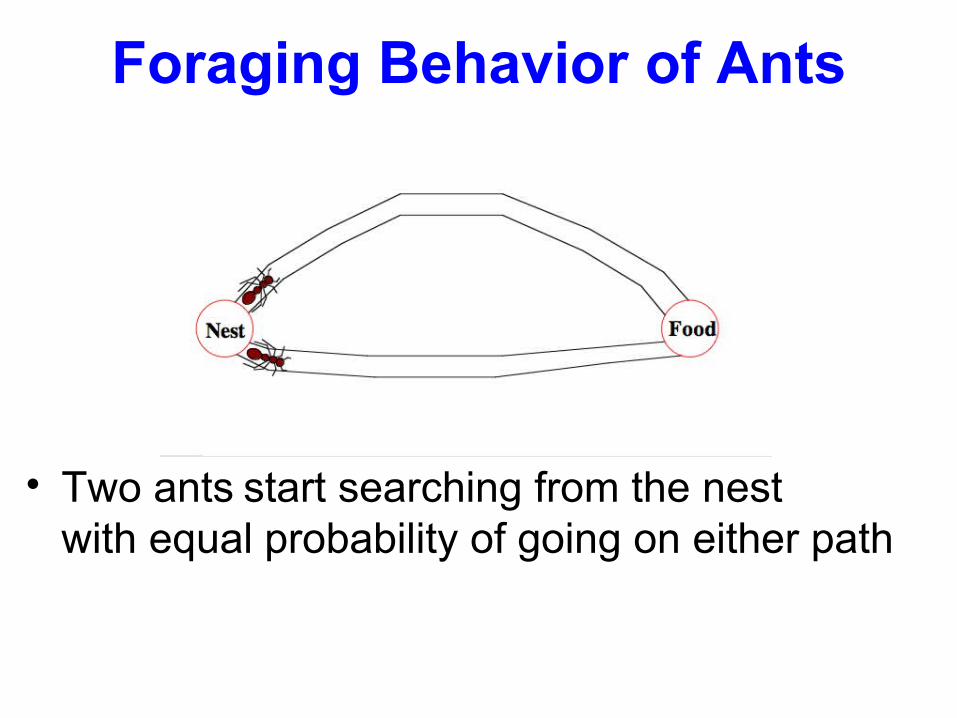
Foraging Behavior of Ants
• Two ants start searching from the nest with equal probability of going on either path
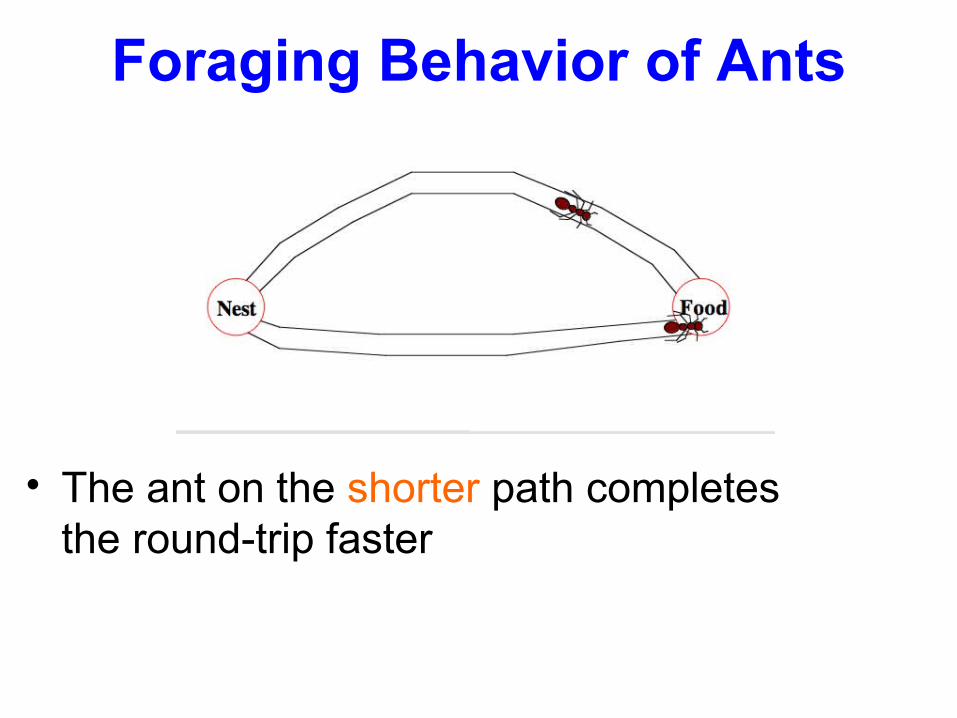
Foraging Behavior of Ants
• The ant on the shorter path completes the round-trip faster
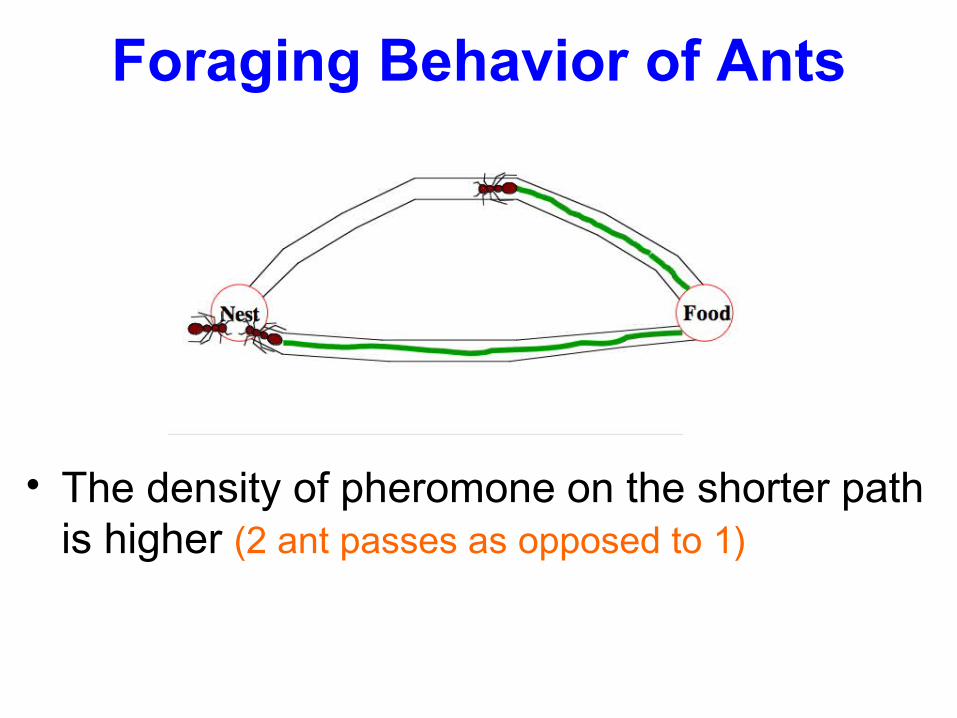
• The density of pheromone on the shorter path is higher (2 ant passes as opposed to 1)
Foraging Behavior of Ants
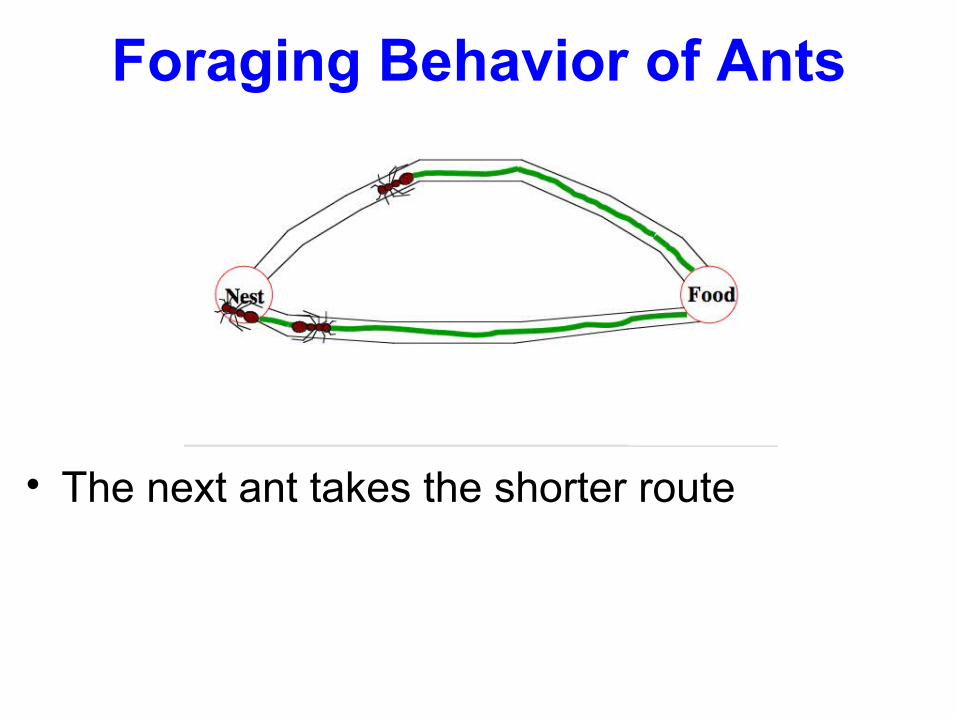
• The next ant takes the shorter route
Foraging Behavior of Ants
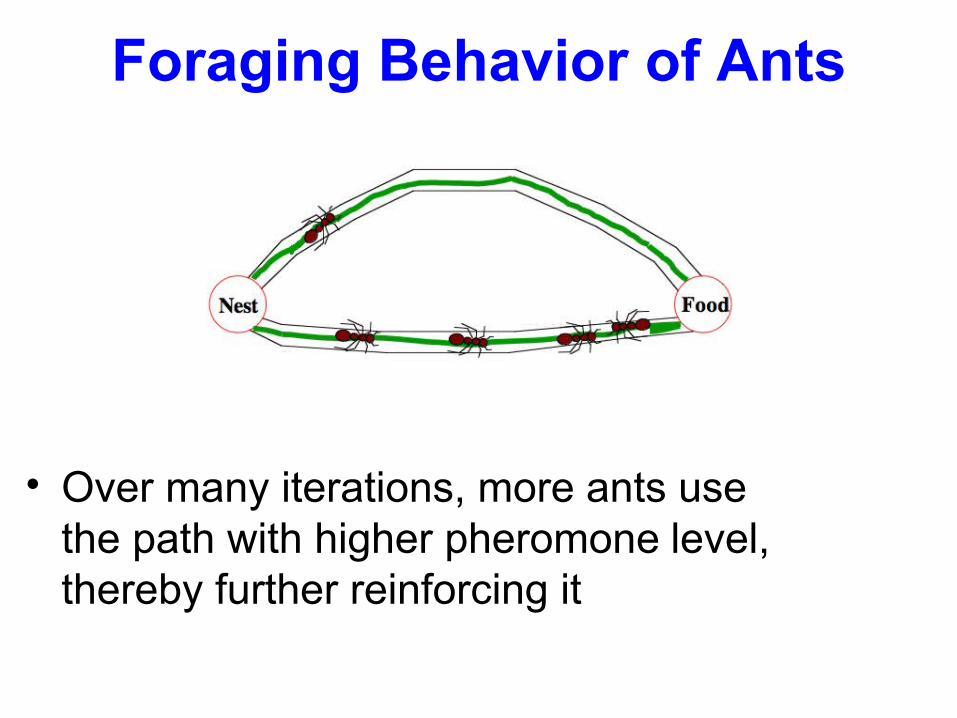
• Over many iterations, more ants use the path with higher pheromone level, thereby further reinforcing it
Foraging Behavior of Ants
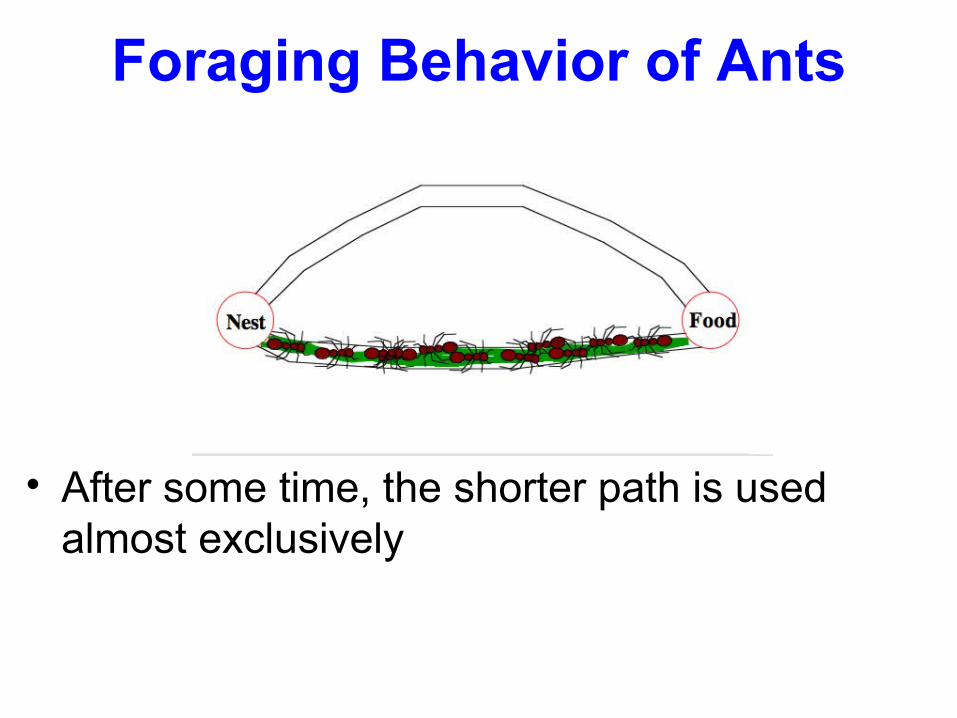
• After some time, the shorter path is used almost exclusively
Foraging Behavior of Ants
• Simulating this technique leads to the algorithm of Ant Colony Optimization within the area of Swarm Intelligence in AI
Ant Colony Optimization
Conclusions and Future Directions
Conclusions
• Better understanding of the power and the limitations of the distributed control from an algorithmic point of view
• Development of provably correct and
efficient protocols
Future Directions
More accurate models for robot swarmsRealistic assumptions regarding resources
& capabilitiesCapturing inaccurate measurements,
movements & calculationsAdditional complexity measures (distance
traveled, number of turns?) Practical (local, simple, robust) algorithms Handling more complex tasks Fault tolerance
Problems With Common Model:
Incompatibility with practical state-of-the-art:
• Some overly pessimistic assumptions concerning robot weaknesses
• Some overly optimistic assumptions concerning robot capabilities
Future Direction: Better Models
Overly Pessimistic Weaknesses
Obliviousness Lack of common orientation Anonymity Lack of explicit communication
Original Motivation
Good reasons for studying weak robots:
• Explore border between attainable and unattainable under most extreme model:– weakest possible type of robots– harshest possible external environment
• Algorithms for weakest possible robots will work for any model
Reasons against:
• Leads to cumbersome / impractical algorithmic solutions
• Does not support modularity and multi-phase processes
Unlimited visibility Perfect measurements and
computations No failures Lack of dimensions
Overly Optimistic Strengths
Reasons against:
• Unrealistic expectations• Algorithms based on these
assumptions will fail in reality
Desirable Model Modifications
Introduce additional ingredients: some stable memory robot identification / signaling limited communication limited common orientation dimensional robots (taking collisions
into account)

THE ENDTHE END
