Álgebra lineal y modelamiento económico
TRANSCRIPT
Matrices, Vectores & Álgebra de Matrices
Una Introducción para en Análisis Económico
J.C.Segura-Ortiz
Universidad de Santo Tomás de Aquino
Maestría en Ciencias Económicas, 2017

Plan
1. Discusión Inicial: Motivación
� Análisis Económico y Modelamiento
� Economists do it with Models (¡!)
� Modelos Analíticos y Modelos Matemáticos
2. Matrices y Modelos de Economía
� Sistemas de Ecuaciones
� Matrices, Vectores, Espacios Vectoriales
� Operaciones Básicas entre Matrices
� Determinante de una Matriz Cuadradas
� La matriz Inversa de una Matriz
3. Algunas Aplicaciones
� Soluciones Minimocuadráticas a sistemas impropios
� Input-Output analysis

1. Discusión Inicial: Motivación
� Análisis Económico y Modelamiento
� Economists do it with Models (¡!)
� Modelos, Modelos Analíticos y Modelos Matemáticos

“Economists do it with models” (an old joke)
� El mundo real es complejo y su estudio, requiere la
abstracción de las características relevantes para el
investigador. Un modelo es una abstracción del objeto que es
sujeto de estudio.
� Un modelo económico es un marco teórico, y no tiene que ser
matemático (Chiang, 2009: 5) .
� No obstante si se decide construir un modelo matemático de
economía, este constará de un conjunto de ecuaciones que
describen la estructura del modelo. (Chiang, id).
� Las ecuaciones, en general, relacionan variables en forma
lineal o no lineal. Describen condiciones de equilibrio,
comportamientos, etc.

Variables, Constantes, Parámetros (Chiang 2009:05 & ss)
� Variable: Objeto analítico cuyo valor es susceptible de
cambiar. Se representan mediante símbolos, ―en oposición a
representaciones numéricas. (ejemplos de variables en
economía?
� Variables Endógenas: Aquellas para las cuales el modelo
produce una solución. Ejemplos?
� Variables Exógenas: Variables que vienen determinadas desde
fuera del modelo. Ejemplos?
� Parámetros, Coeficientes, Constantes ~ Semejan a las
Variables Exógenas en cuanto presunciones del modelo.

Ecuaciones e Identidades (Chiang 2009:05 & ss)
� El modelo combina variables exógenas y endógenas mediante
combinaciones algebráicas entre ellas dando lugar a
ecuaciones y/o identidades.
� Chiang propone tres tipos de expresiones:
o Identidades (eqn definicional): Define o establece
identidad entre dos expresiones alternativas con el mismo
significado: � ≡ �′� − �′�
o Ecuaciones de Comportamiento: Define el comportamiento
de una variable como resultado de cambios en otra(s)
variable(s): ��p� = ��∙p′� ∙ ����
o Ecuaciones Condicionales: Expresa condiciones a satisfacer.
Ejemplo: Condiciones de Equilibrio: Cantidad Demandada =
Cantidad Ofrecida, CMg = IMg, etc.

Considere un modelo elemental de mercado
Demanda: �� = � − �� [1]
Oferta: �� = −� � �� [2]
Condición de Equilibrio: �� = �� [3]
Imagen tomada de Chiang, 2009, Op. Cit.
¿Cuáles son sus soluciones? � − �� = −� � ��
P∗ = a � cd � b
�∗ = a − b $a � cd � b% = ��� � �� − ��� � ��� � � = �� − ��� � �
Ejercicio: Suponga la siguiente parametrización del modelo [1]~[3] � = 21, � = 3, � = 4, � = 8. Cuál es ��∗, �∗� . Trace en el plano.
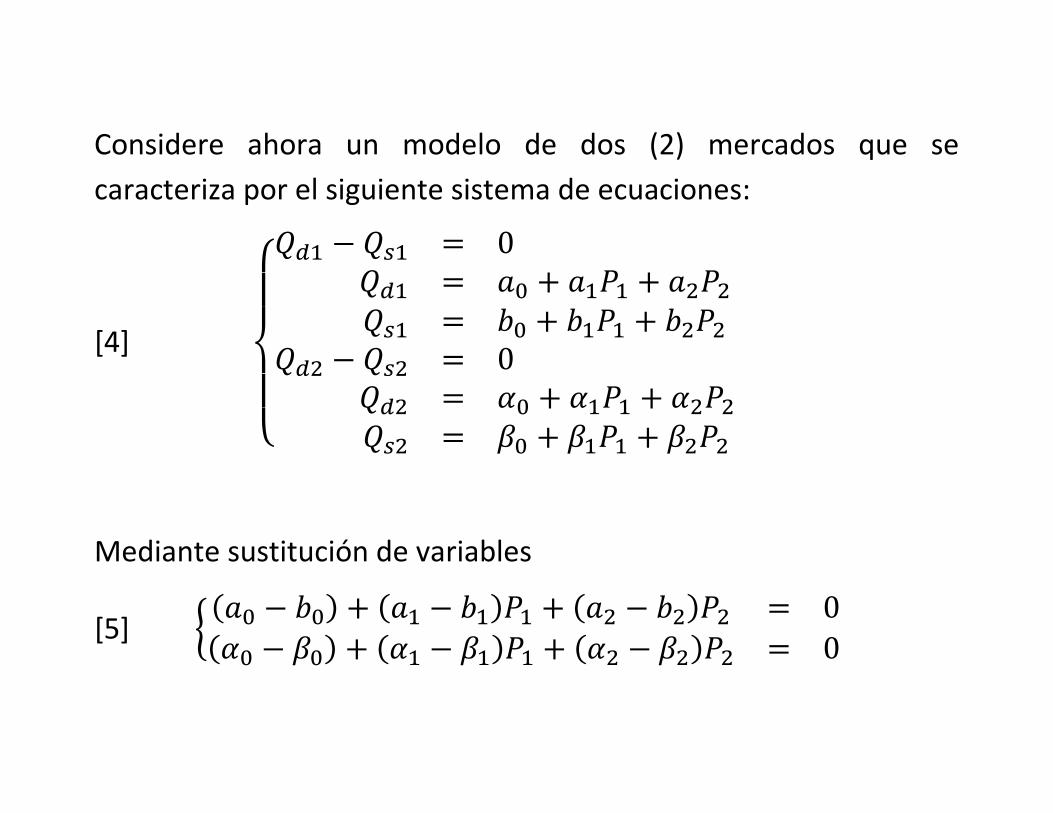
Considere ahora un modelo de dos (2) mercados que se
caracteriza por el siguiente sistema de ecuaciones:
[4]
,-.-/��� − ��� = 0��� = �1 � ���� � �2�2��� = �1 � ���� � �2�2��2 − ��2 = 0��2 = �1 � ���� � �2�2��2 = 31 � 3��� � 32�2
Mediante sustitución de variables
[5] 4��1 − �1� � ��� − ����� � ��2 − �2��2 = 0��1 − 31� � ��� − 3���� � ��2 − 32��2 = 0

Sean 4� ≡ �� − ��∀7 = 0,1,28 ≡ �� − 3�∀7 = 0,1,2
De este modo [5] puede escribirse
[5’] 4���� � �2�2 = −�18��� � 82�2 = −81
Cuyas soluciones son (verifique que es así):
��∗ = �281 − �182��82 − �28�
�2∗ = �18� − ��81��82 − �28�
¿Estas soluciones siempre tienen sentido?

En general, un modelo de m ecuaciones en n variables puede
escribirse:
9 ���� � ��22 �⋯� ��;; = ���2�� � �222 �⋯� �2;; = �2⋯�<��� � �<22 �⋯� �<;; = �<
Los índices importan: �<2 es el coeficiente de la variable 2 en la
m-ésimo ecuación. �2; es el coeficiente de la n-ésimo variable en
la ecuación 2.
El sistema de ecuaciones contiene tres (3) tipos de entidades:
� Coeficientes: Los elementos �=
� Variables: Los elementos =
� Constantes: Los Elementos �

Coeficientes, Variables y Constantes se pueden disponer en
arreglos, i.e.,
> = ?��� ��2 ⋯ ��;�2� �22 ⋯ ��;⋮ ⋮ ⋱ ⋮�<� �<2 ⋯ �<;B = ?�2⋮;B � = ?���2⋮�;
B
Note que el modelo [5’] admite una representación alternativa:
C�� �28� 82D $���2% = C−�1−81D

Rango de una Matriz
Sea una matriz (�=) de tamaño E× G y considere por separado cada una de
sus filas >�⋯><. La i-ésima fila está conformada por los elementos: > = H��, �2, ⋯ , �= , ⋯ �;I∀7 = 1,… ,E
Si K = {>�⋯><} es no vacía, entonces la ecuación N�>� � N2>2 �⋯� N=>= �⋯N;>; = 0
con N�, … , N; escalares tiene, al menos una solución, i.e., N� = N2 = ⋯ = N= = ⋯ = N; = 0
Caso en el cual se dice que los vectores en K son linealmente
independientes.
Si por el contrario existen otras soluciones, entonces los vectores
en K son linealmente dependientes.
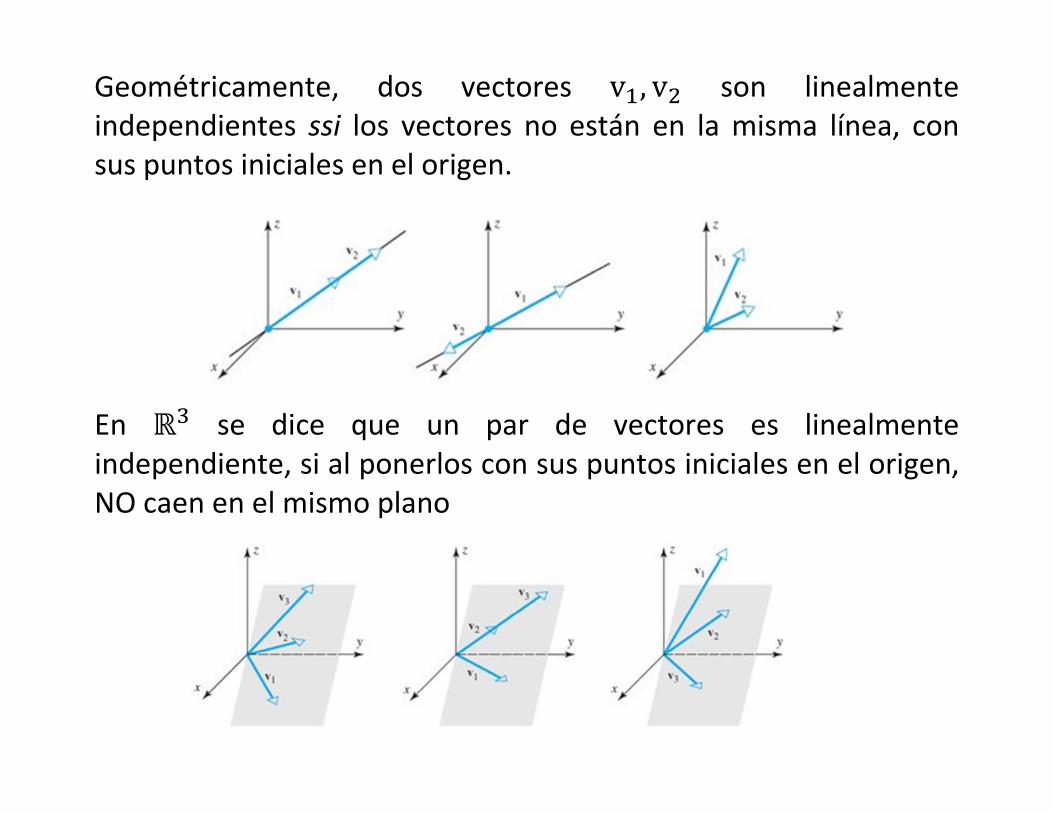
Geométricamente, dos vectores v�, v2 son linealmente independientes ssi los vectores no están en la misma línea, con sus puntos iniciales en el origen.
En PQ se dice que un par de vectores es linealmente independiente, si al ponerlos con sus puntos iniciales en el origen, NO caen en el mismo plano
� Teorema: un conjunto S con al menos dos vectores:
o Presenta Dependencia lineal ssi al menos uno de los
vectores puede expresarse como una combinación lineal
de los otros vectores.
o Es linealmente independiente si ningún vector en S puede
expresarse como combinación lineal de los otros.
� Dada una matriz > el número máximo de vectores fila
linealmente independientes se llama Rango de R.
� Si > tiene E filas y G columnas, y G > E entonces el máximo
rango posible de > es E.
� El número de vectores columna linealmente independientes
de > es igual al número de vectores fila linealmente
independientes (demostrarlo). Por lo tanto, el rango de una
matriz es el número máximo de vectores (fila o columna)
linealmente independientes de la matriz.

Ejemplo:
Los vectores >� = �1,0,0�, >2 = �0,1,0�, y >Q� = �0,0,1� son
linealmente independientes:
N�>� � N2>2 � NQ>Q = �N�, N2, N�� = 0 ↔ N� = N2 = N� = 0
Como consecuencia, el rango de la matriz
U = V1 0 00 1 00 0 1W
Es 3

Ejemplo:
Los vectores >� = �1,1,0�, >2 = �1,0,1�, y >Q. = �1,−1,2� son
linealmente dependientes: en efecto, >Q = 2>2 − >�, i.e.,
>� − 2>2 � >Q = 0
Cualquiera de estos vectores puede escribirse como combinación
lineal de los otros dos (pero no de menos de dos), por lo tanto, la
matriz
U = V1 1 01 0 11 −1 2W
Tiene rango 2.

Ejemplo.― Considere la matriz:
ℍ = V1 2 3 41 0 1 12 2 4 5W
Filas 1 y 2 son linealmente independientes al igual que las filas 1 y
3. No obstante Fila 1 + Fila 2 – Fila 3 = [\\] luego los tres vectores son
linealmente dependientes por lo tanto Rango�ℍ� = 2. Ahora
considere la matriz ℍ̂ que resulta de eliminar la fila 3 de ℍ, o sea
ℍ̂ = C1 2 3 41 0 1 1D
Todos los pares de columnas de ℍ̂ son linealmente
independientes por lo que RangoHℍ̂I es por lo menos 2.
Un conjunto de E vectores linealmente independientes >�, ⋯ , ><
conforman una base del espacio euclidiano en m. Cualquier vector � en
dicho espacio puede ser escrito como una combinación lineal de >�, ⋯ , ><, esto es:
� = _ N><`�
Donde los N son escalares. Considere ahora un sistema de n ecuaciones
en n incógnitas:
V��� ⋯ ��;⋮ ⋱ ⋮�<� ⋯ �<;WV�⋮;W = V��⋮�;W
En notación matricial, > = �. Si resulta que el Rango�>� < G es porque
alguna de las filas de > es combinación de las otras y al menos una
ecuación es derivable de las otras: hay menos que G ecuaciones
independientes en G incógnitas: en este caso, no hay solución única.

Teorema:
Si > es matriz cuadrada de orden G, entonces Rango�>� = G si y solo si |>| ≠ 0.
Definición:
Una es matriz > cuadrada de orden G tal que Rango�>� = G se dice que
es no singular. Si Rango�>� < G, se dice que > es matriz singular.